Embed Size (px)
Citation preview
Elektronika cyfrowa
Warunek zaliczenia wykładu:
•wykonanie sześciu ćwiczeń w Pracowni Elektronicznej
Część notatek z wykładu znajduje się na:
http://zefir.if.uj.edu.pl/planeta/wyklad_elektronika/
1
Pracownia Elektroniczna (F-1-17)
Informacje o programie ćwiczeń:
http://zefir.if.uj.edu.pl/spe/ 2
Elektronika – zajmuje się zastosowaniem zjawisk elektromagnetycznych do przesyłania i przetwarzania sygnałów elektrycznych (informacji)
Układ elektroniczny – układ spełniający z góry założone zadanie w stosunku do sygnałów elektrycznych
3
Układy przebiegów sinusoidalnych: filtry, wzmacniacze, generatory, modulatory
Klasyfikacja układów elektronicznych
Układy impulsowe: układy elektroniki cyfrowej, wzmacniacze impulsowe, przetworniki analogowo-cyfrowe, dyskryminatory
Układy zasilające: układy służące do zasilania i sterowania pracą innych układów
4
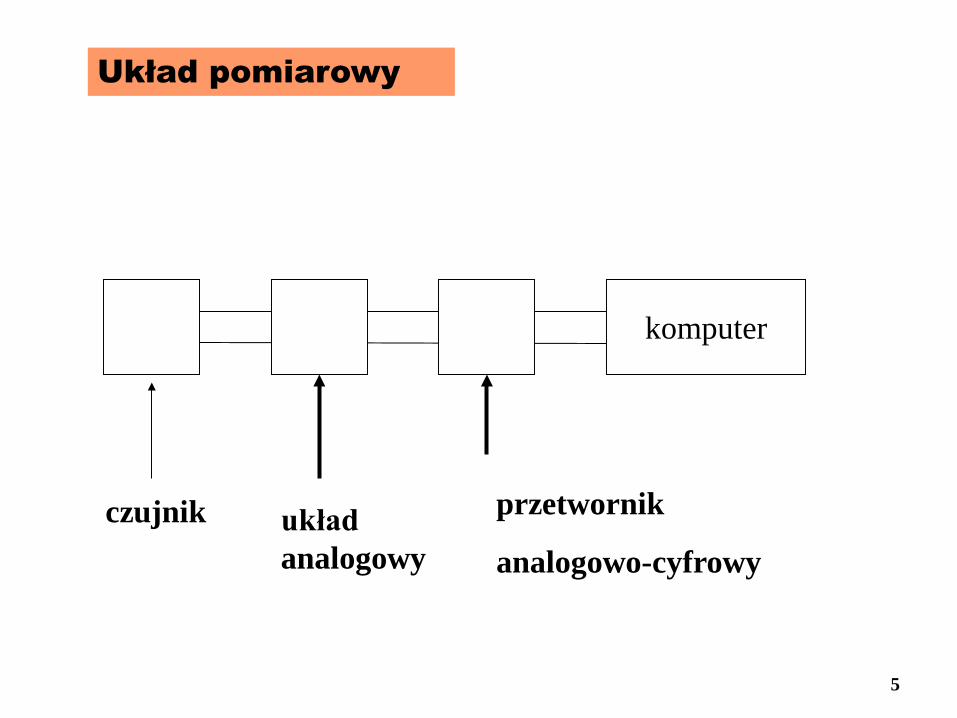
Układ pomiarowy
komputer
czujnik
układ analogowy
przetwornik
analogowo-cyfrowy
5
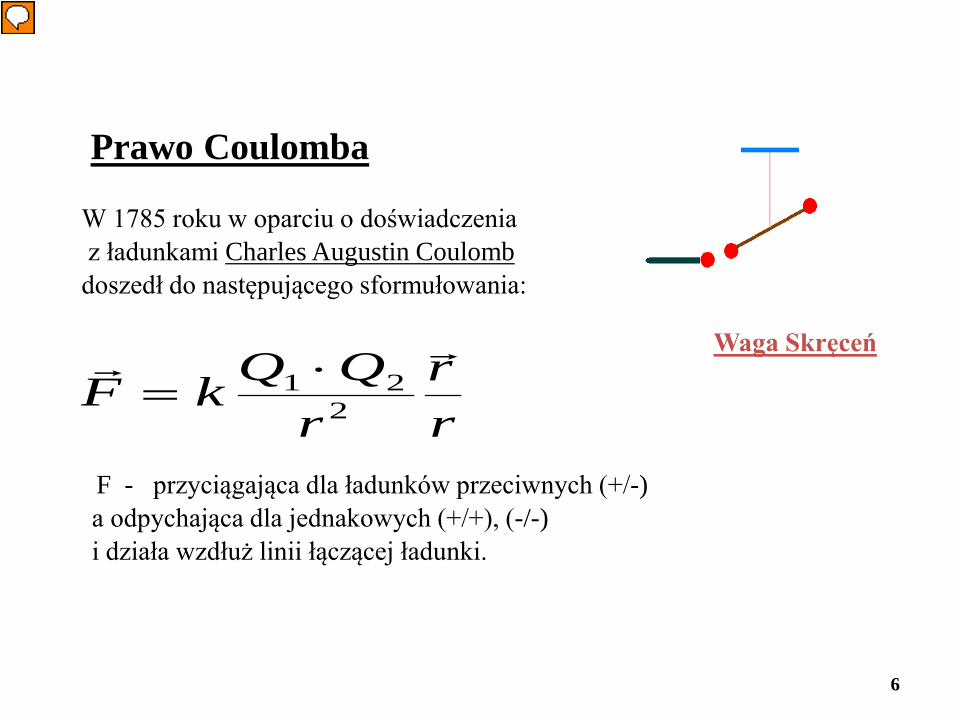
Prawo Coulomba
W 1785 roku w oparciu o doświadczenia z ładunkami Charles Augustin Coulomb doszedł do następującego sformułowania:
F - przyciągająca dla ładunków przeciwnych (+/-) a odpychająca dla jednakowych (+/+), (-/-) i działa wzdłuż linii łączącej ładunki.
rr
rQQkF
2
21 ⋅=
Waga Skręceń
6
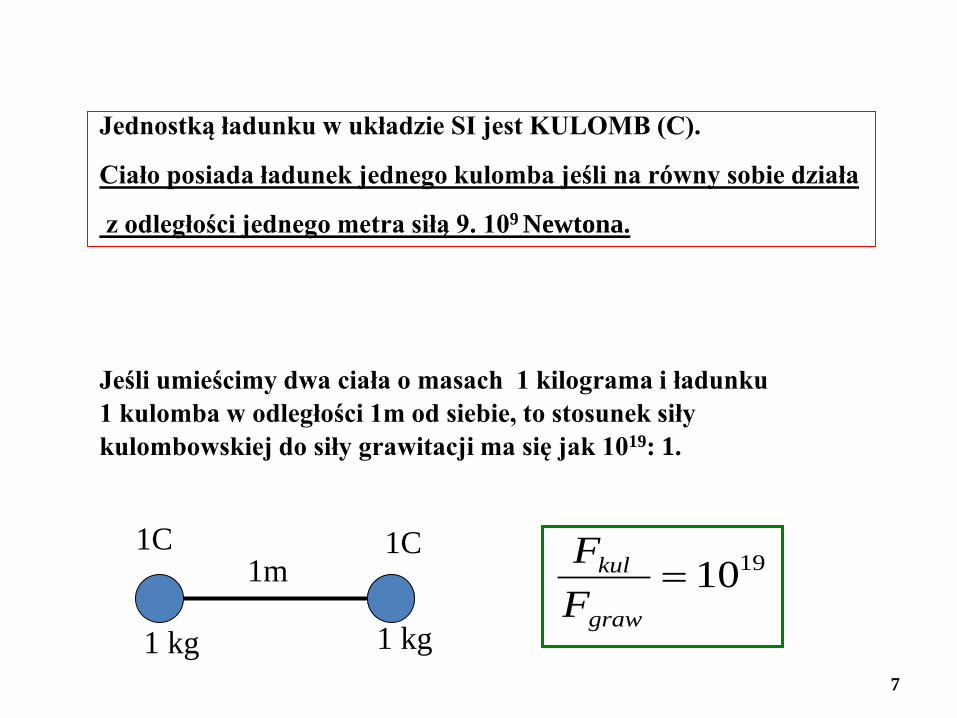
Jednostką ładunku w układzie SI jest KULOMB (C).
Ciało posiada ładunek jednego kulomba jeśli na równy sobie działa
z odległości jednego metra siłą 9. 109 Newtona.
Jeśli umieścimy dwa ciała o masach 1 kilograma i ładunku 1 kulomba w odległości 1m od siebie, to stosunek siły kulombowskiej do siły grawitacji ma się jak 1019: 1.
1m 1C 1C
1 kg 1 kg
1910=graw
kul
FF
7
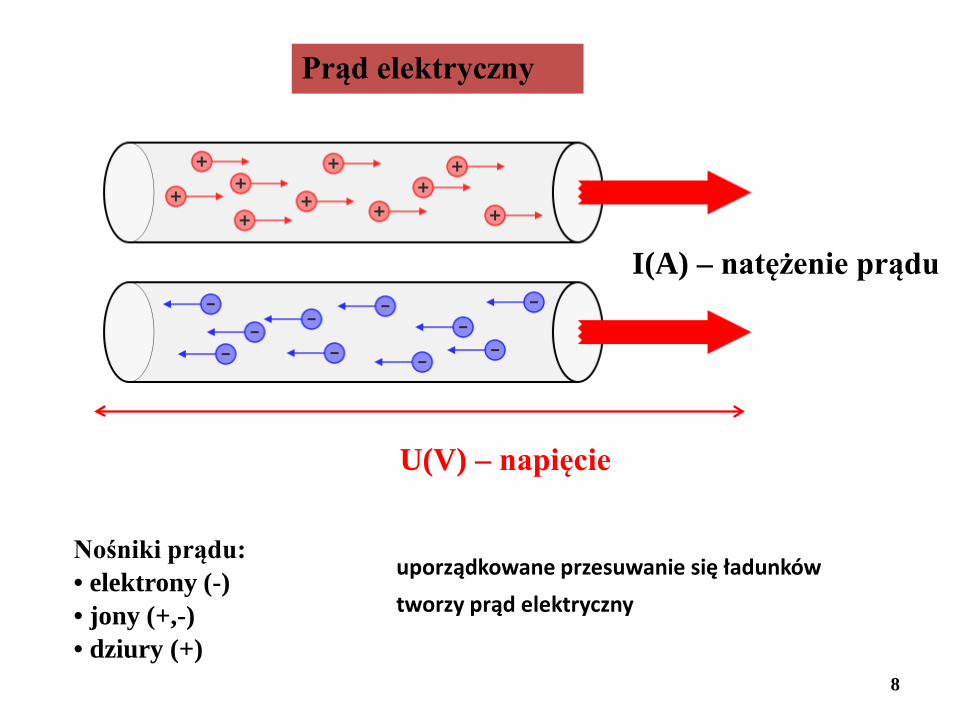
Prąd elektryczny
I(A) – natężenie prądu
U(V) – napięcie
Nośniki prądu: • elektrony (-) • jony (+,-) • dziury (+)
8
uporządkowane przesuwanie się ładunków tworzy prąd elektryczny
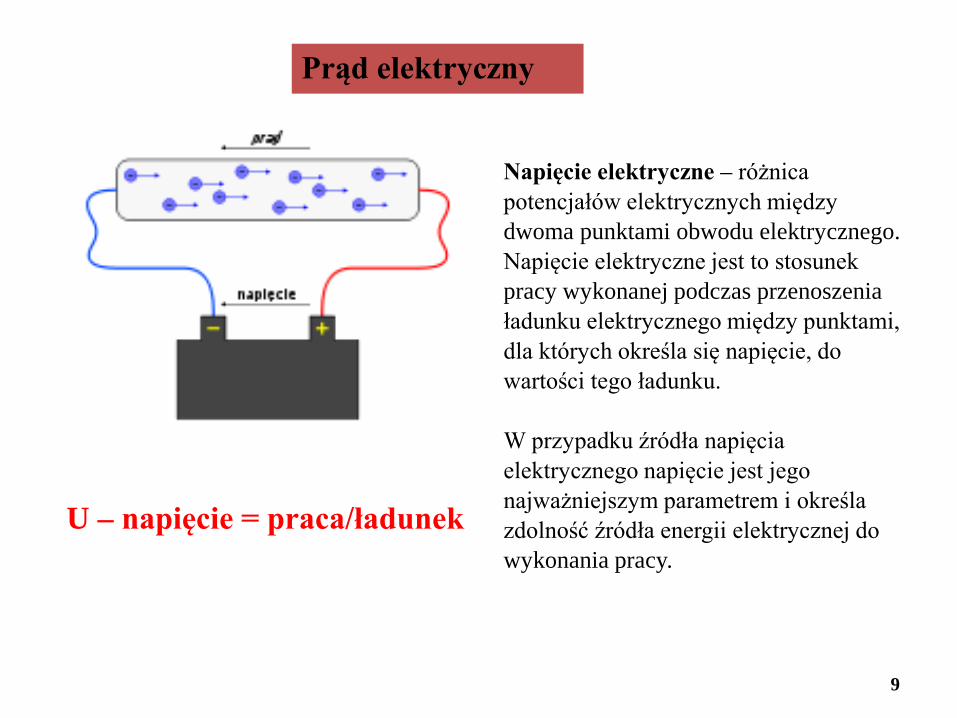
Prąd elektryczny
U – napięcie = praca/ładunek
Napięcie elektryczne – różnica potencjałów elektrycznych między dwoma punktami obwodu elektrycznego. Napięcie elektryczne jest to stosunek pracy wykonanej podczas przenoszenia ładunku elektrycznego między punktami, dla których określa się napięcie, do wartości tego ładunku. W przypadku źródła napięcia elektrycznego napięcie jest jego najważniejszym parametrem i określa zdolność źródła energii elektrycznej do wykonania pracy.
9
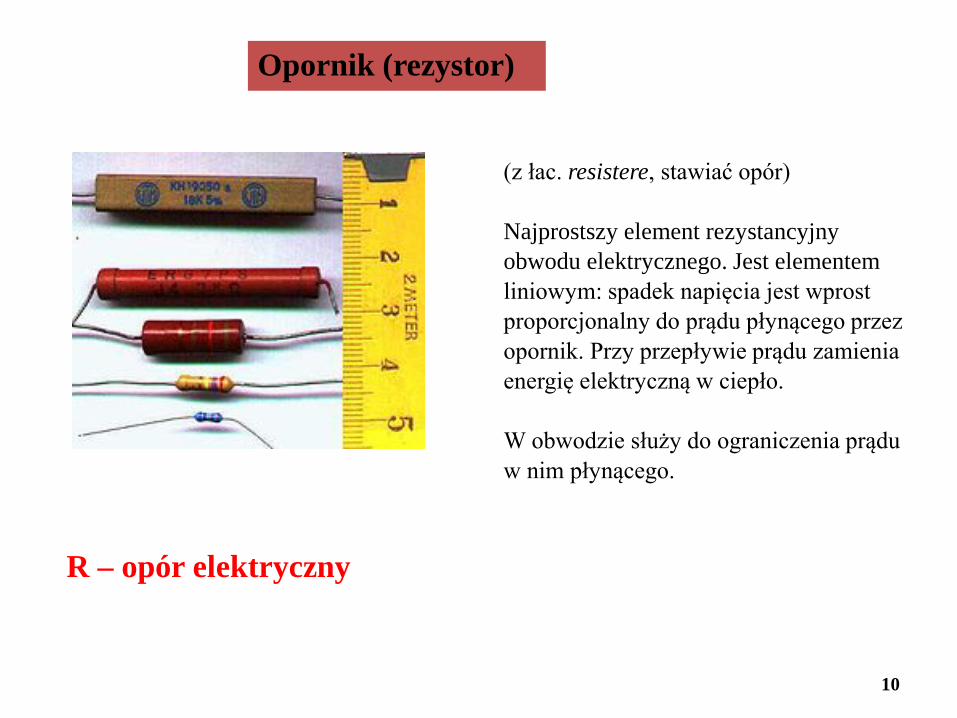
Opornik (rezystor)
R – opór elektryczny
(z łac. resistere, stawiać opór) Najprostszy element rezystancyjny obwodu elektrycznego. Jest elementem liniowym: spadek napięcia jest wprost proporcjonalny do prądu płynącego przez opornik. Przy przepływie prądu zamienia energię elektryczną w ciepło. W obwodzie służy do ograniczenia prądu w nim płynącego.
10
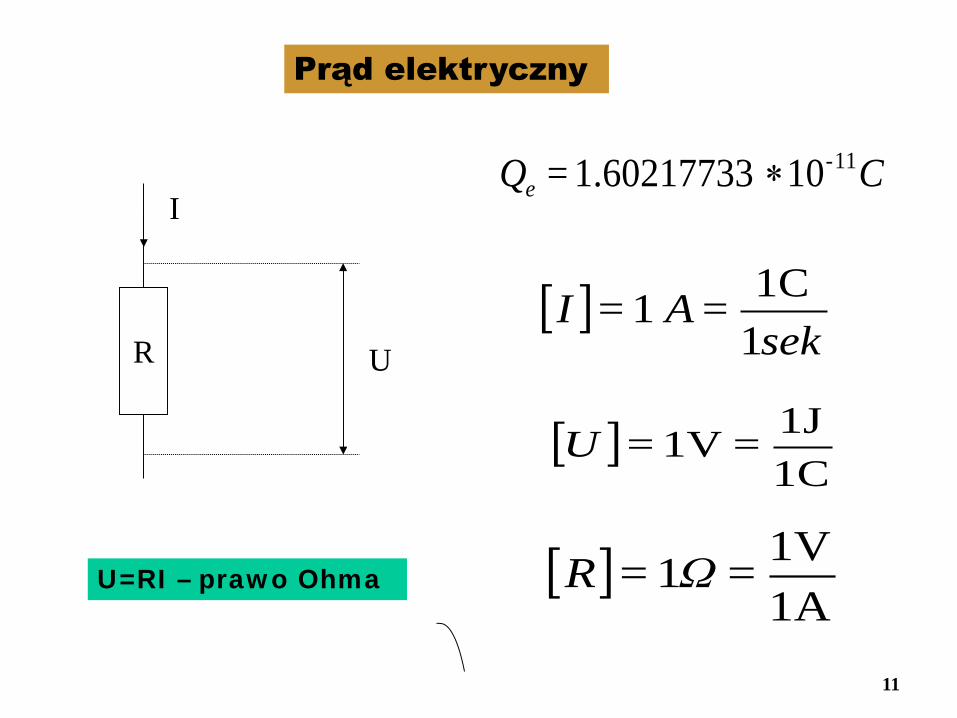
Prąd elektryczny
C=Qe11 -10 1.60217733 ∗
[ ]sek
=A=I11C1
[ ]1C1J1V ==U
[ ]1A1V1 =Ω=R
R
I
U
U=RI – prawo Ohma
11
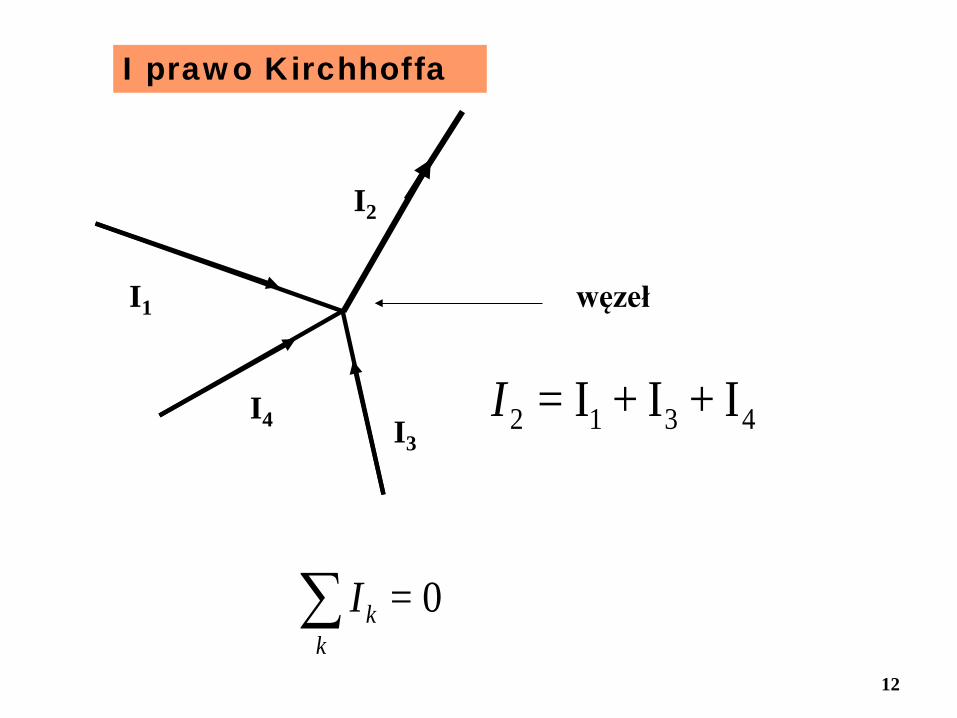
I prawo Kirchhoffa
węzeł I1
I3 I4
I2
0=Ik
k∑
4312 I I I ++=I
12
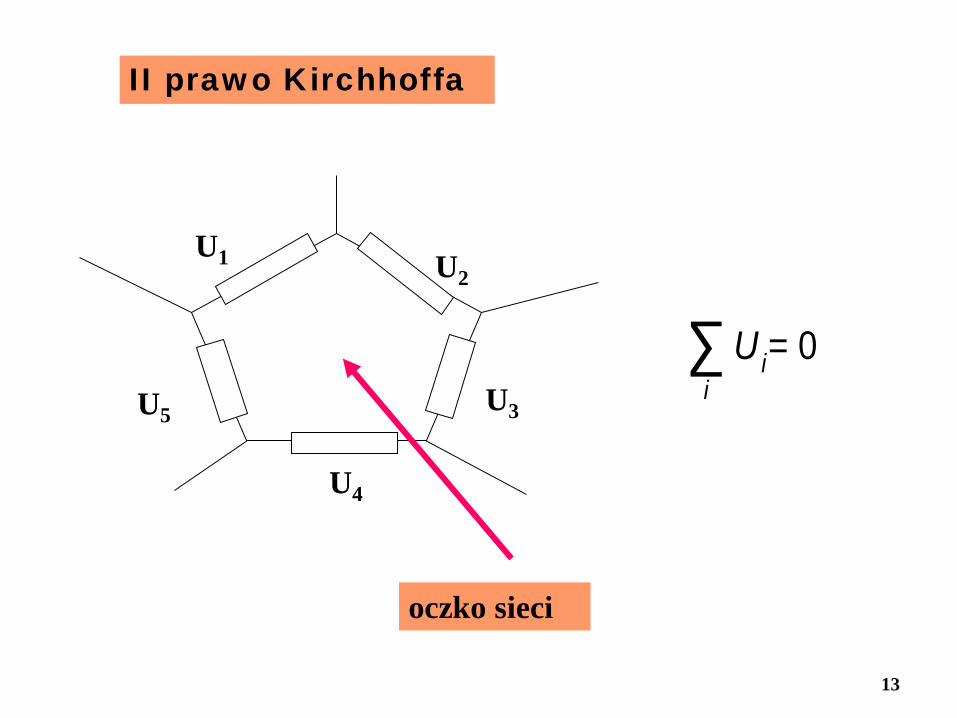
II prawo Kirchhoffa
U1
U5
U4
U3
U2
oczko sieci
∑i
Ui= 0
13
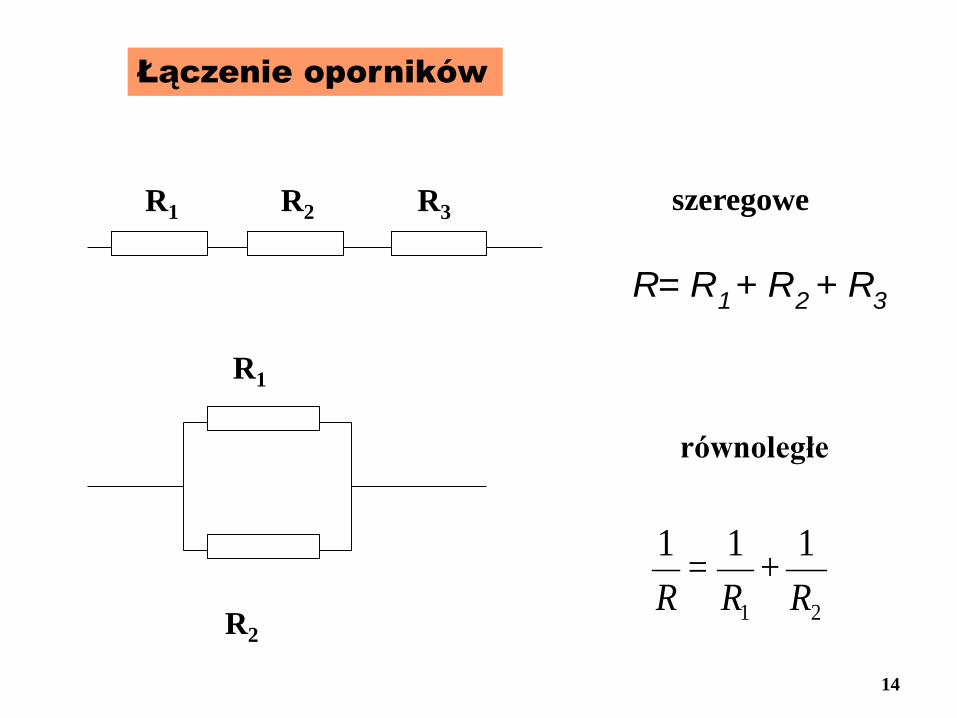
Łączenie oporników
R1 R2 R3
R= R1+ R2 + R3
R1
R2 21
111R
+R
=R
szeregowe
równoległe
14
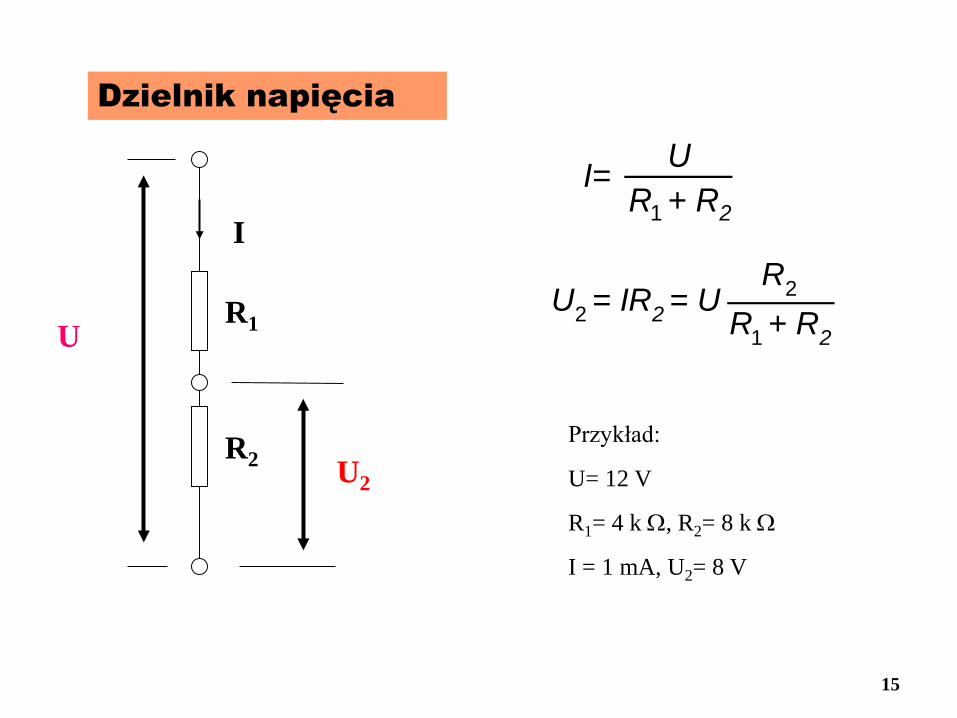
Dzielnik napięcia
U R1
R2
I
U2
I= UR1 + R2
U2 = IR2 = UR2
R1 + R2
Przykład:
U= 12 V
R1= 4 k Ω, R2= 8 k Ω
I = 1 mA, U2= 8 V
15
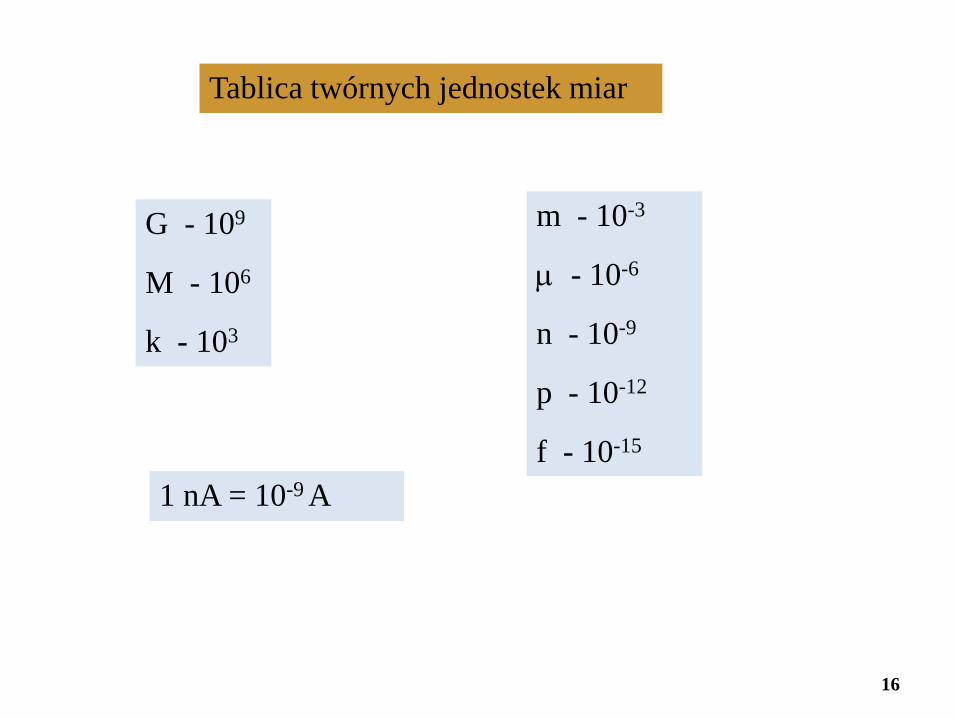
Tablica twórnych jednostek miar
G - 109
M - 106
k - 103
m - 10-3
µ - 10-6
n - 10-9
p - 10-12
f - 10-15 1 nA = 10-9 A
16
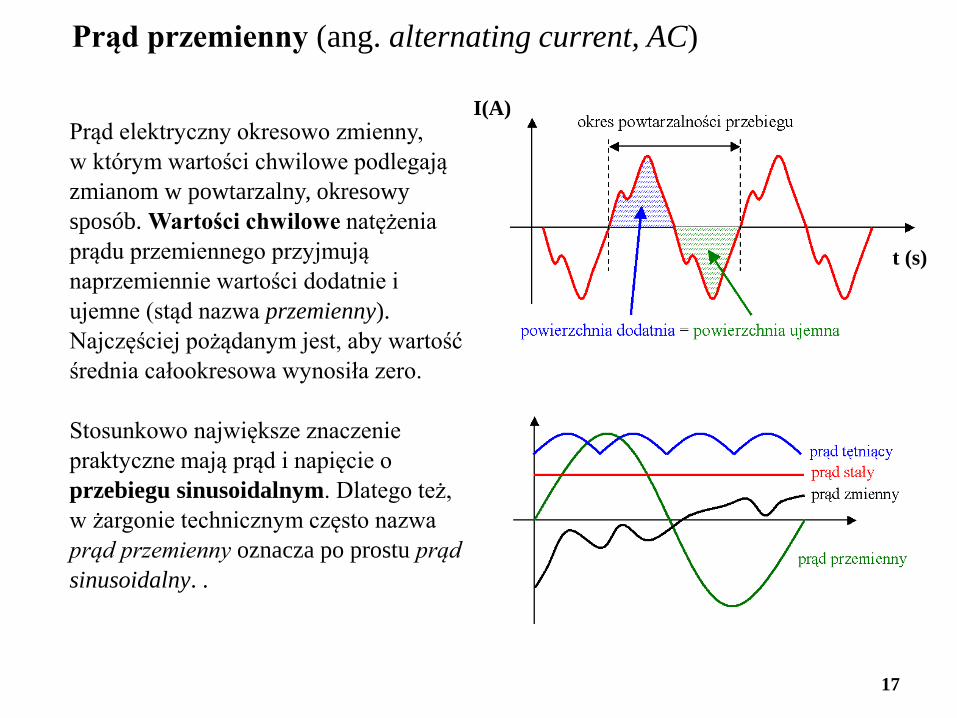
Prąd przemienny (ang. alternating current, AC)
Prąd elektryczny okresowo zmienny, w którym wartości chwilowe podlegają zmianom w powtarzalny, okresowy sposób. Wartości chwilowe natężenia prądu przemiennego przyjmują naprzemiennie wartości dodatnie i ujemne (stąd nazwa przemienny). Najczęściej pożądanym jest, aby wartość średnia całookresowa wynosiła zero. Stosunkowo największe znaczenie praktyczne mają prąd i napięcie o przebiegu sinusoidalnym. Dlatego też, w żargonie technicznym często nazwa prąd przemienny oznacza po prostu prąd sinusoidalny. .
t (s)
I(A)
17
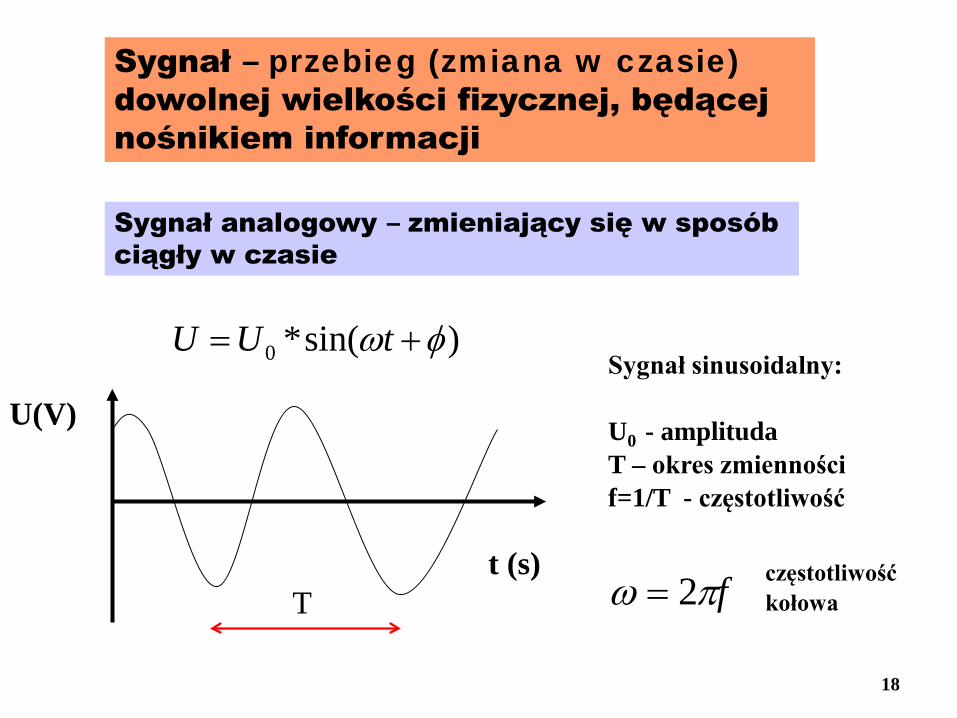
Sygnał – przebieg (zmiana w czasie) dowolnej wielkości fizycznej, będącej nośnikiem informacji
Sygnał analogowy – zmieniający się w sposób ciągły w czasie
t (s)
U(V)
T
Sygnał sinusoidalny: U0 - amplituda T – okres zmienności f=1/T - częstotliwość
fπω 2= częstotliwość kołowa
)sin(*0 φω += tUU
18
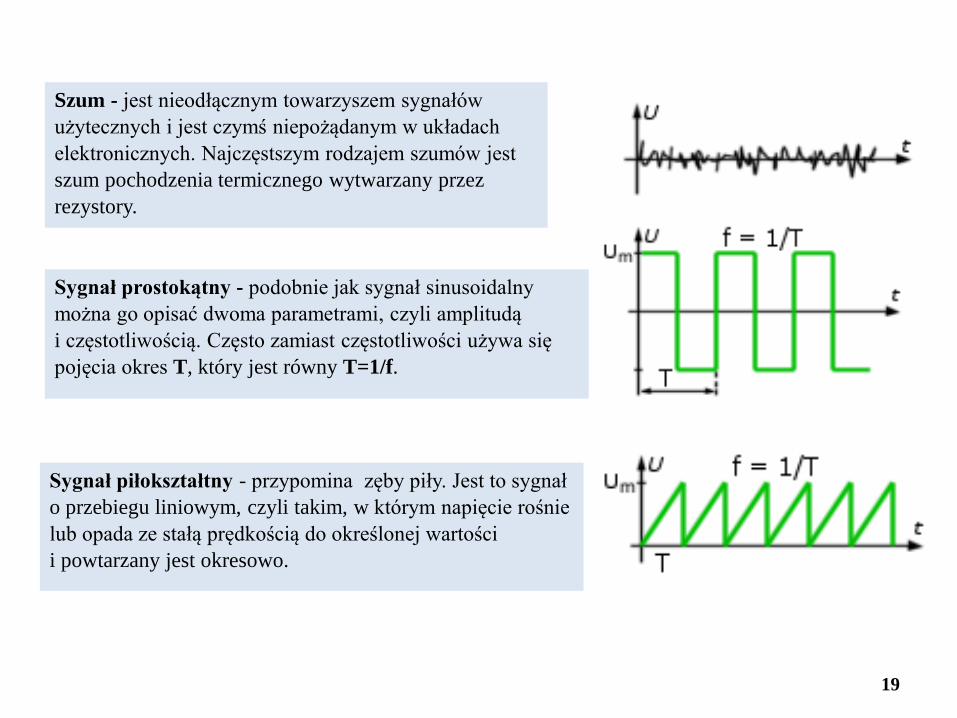
Szum - jest nieodłącznym towarzyszem sygnałów użytecznych i jest czymś niepożądanym w układach elektronicznych. Najczęstszym rodzajem szumów jest szum pochodzenia termicznego wytwarzany przez rezystory.
Sygnał prostokątny - podobnie jak sygnał sinusoidalny można go opisać dwoma parametrami, czyli amplitudą i częstotliwością. Często zamiast częstotliwości używa się pojęcia okres T, który jest równy T=1/f.
Sygnał piłokształtny - przypomina zęby piły. Jest to sygnał o przebiegu liniowym, czyli takim, w którym napięcie rośnie lub opada ze stałą prędkością do określonej wartości i powtarzany jest okresowo.
19
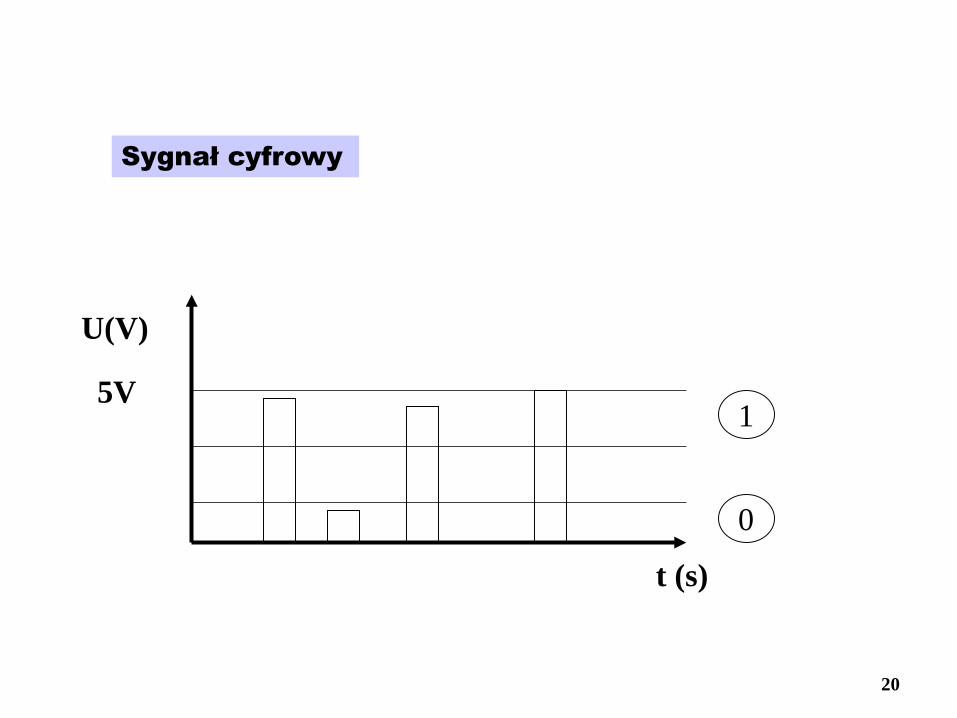
Sygnał cyfrowy
t (s)
U(V)
5V 1
0
20
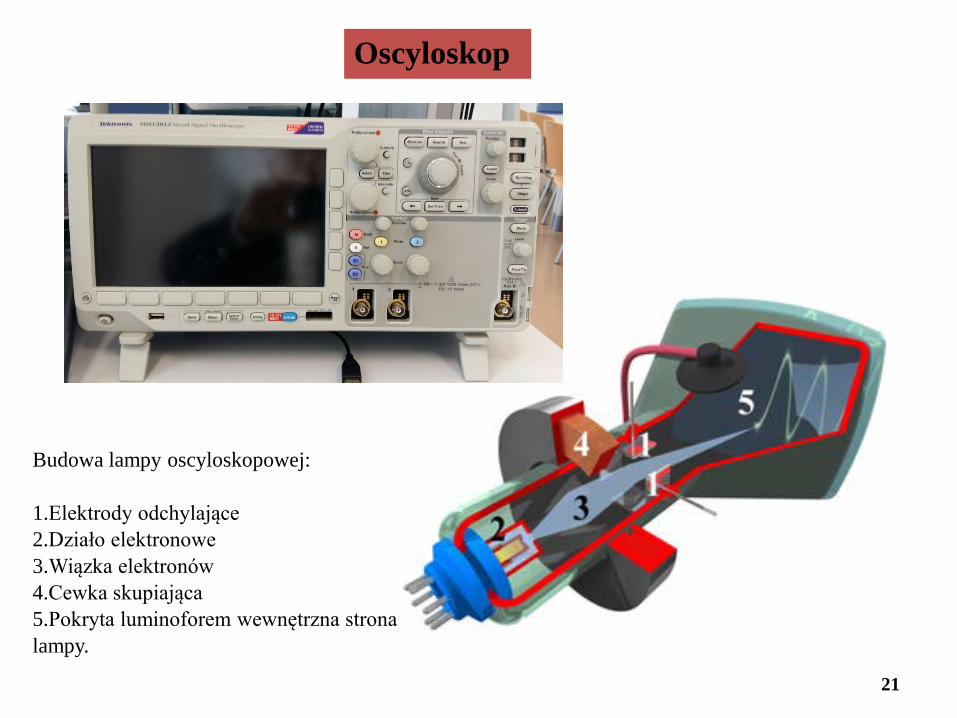
Oscyloskop
21
Budowa lampy oscyloskopowej: 1.Elektrody odchylające 2.Działo elektronowe 3.Wiązka elektronów 4.Cewka skupiająca 5.Pokryta luminoforem wewnętrzna strona lampy.
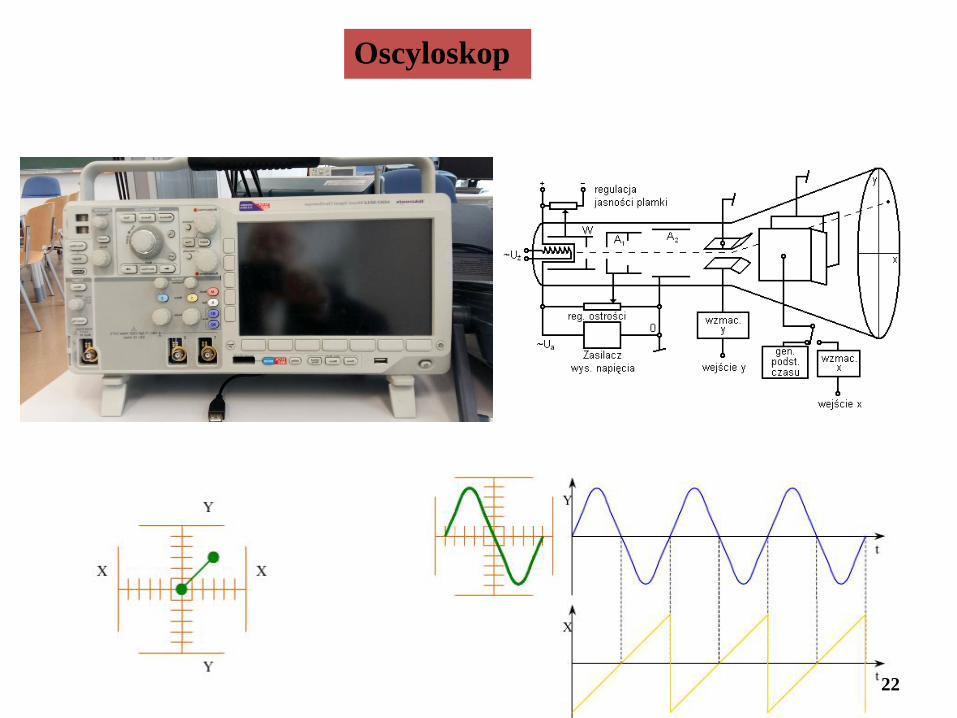
Oscyloskop
22
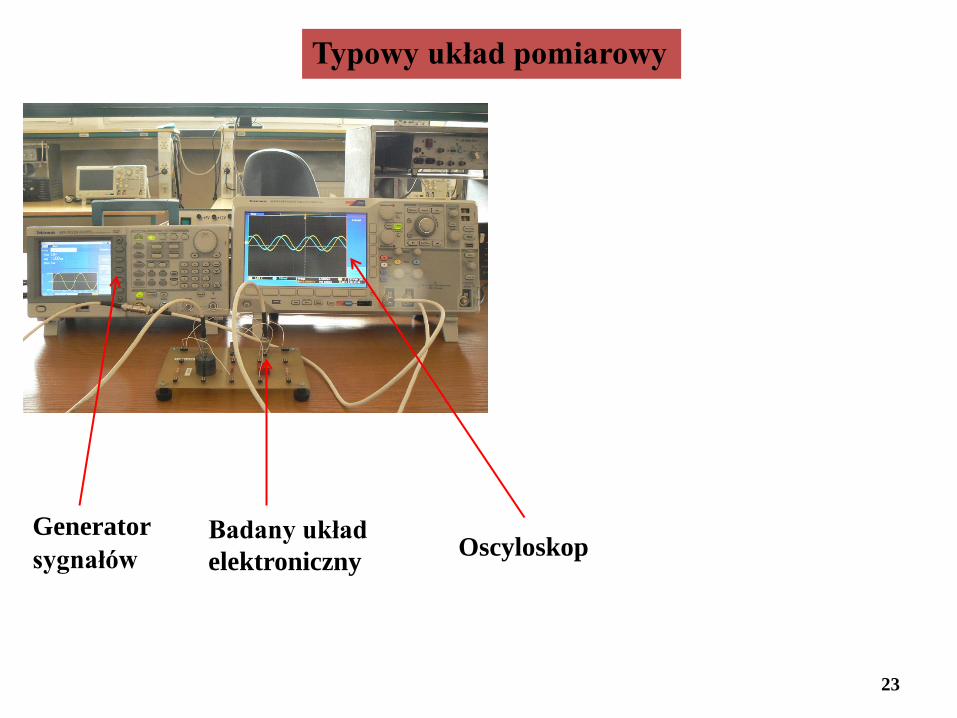
Typowy układ pomiarowy
23
Generator sygnałów Oscyloskop Badany układ
elektroniczny
Kondensator
C= QU
+Q
-Q
U C
Pojemność kondensatora
24
Kondensator
C= QU
U= QC
= 1C ∫ Id t
[ ]1V1C1F==C
+Q
-Q
U C
Pojemność kondensatora
25

Cewka indukcyjna
L U
I
U= L dIdt
L – indukcyjność cewki
26
Cewka indukcyjna
L U
I U= L dI
dt
[ ]1A1Vs1H ==L
H - henr
L – indukcyjność cewki
27
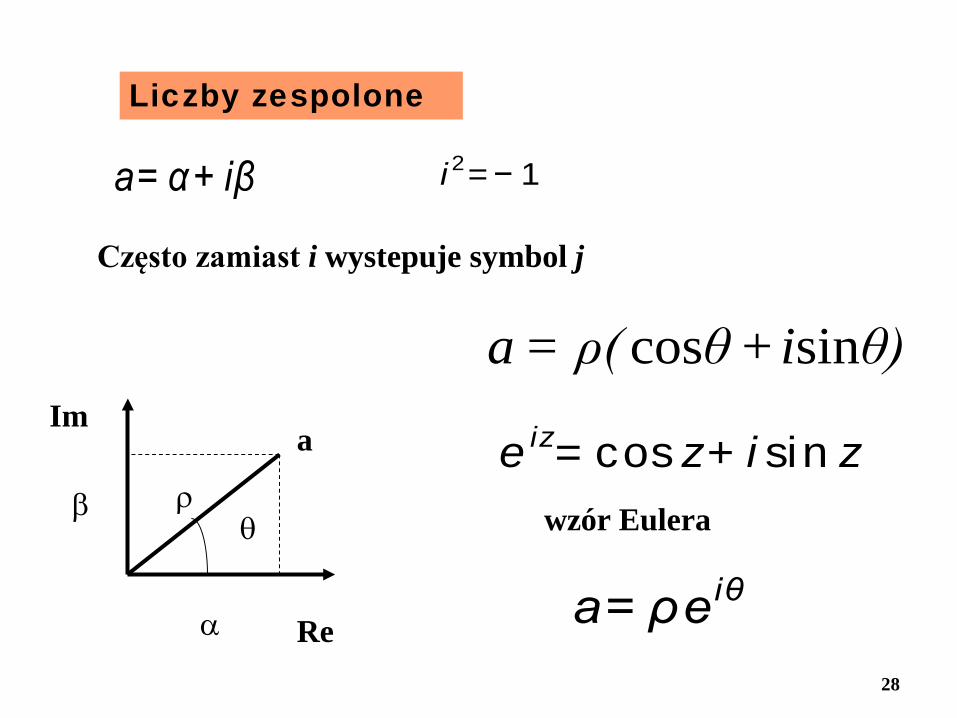
Liczby zespolone
a= α+ iβ i 2=− 1
Często zamiast i wystepuje symbol j
Im
Re
a
α
β ρ θ
θ)i+θρ(=a sincos
e iz= cos z+ i sin zwzór Eulera
a= ρeiθ
28
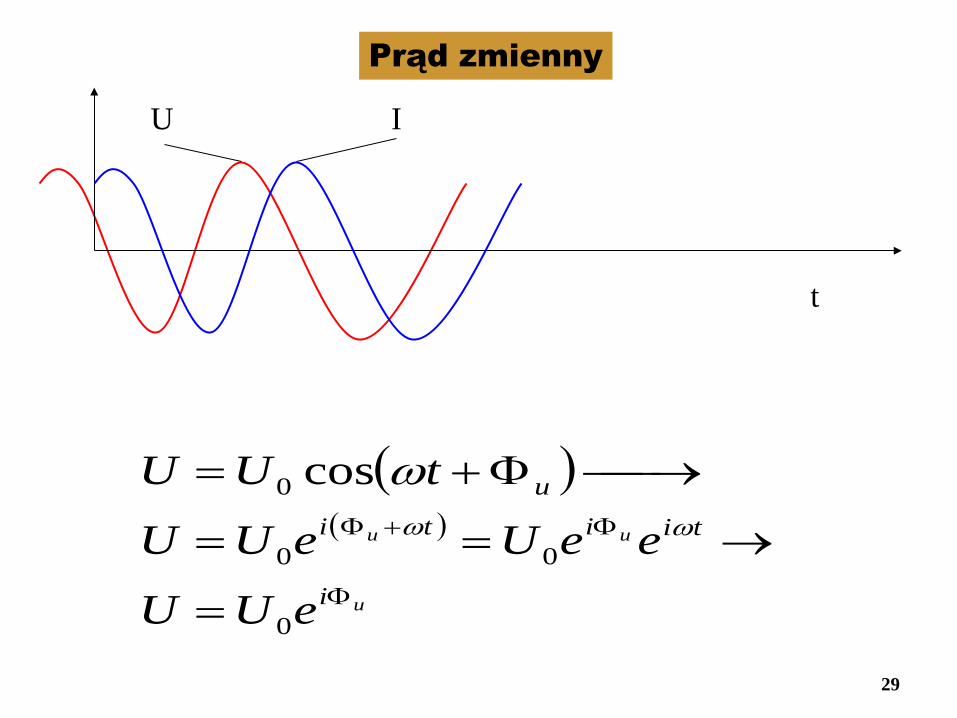
Prąd zmienny
U I
t
( )( )
u
uu
i
tiitiu
eUU
eeUeUU
tUU
Φ
Φ+Φ
=
→==
→Φ+=
0
00
0 cosωω
ω
29
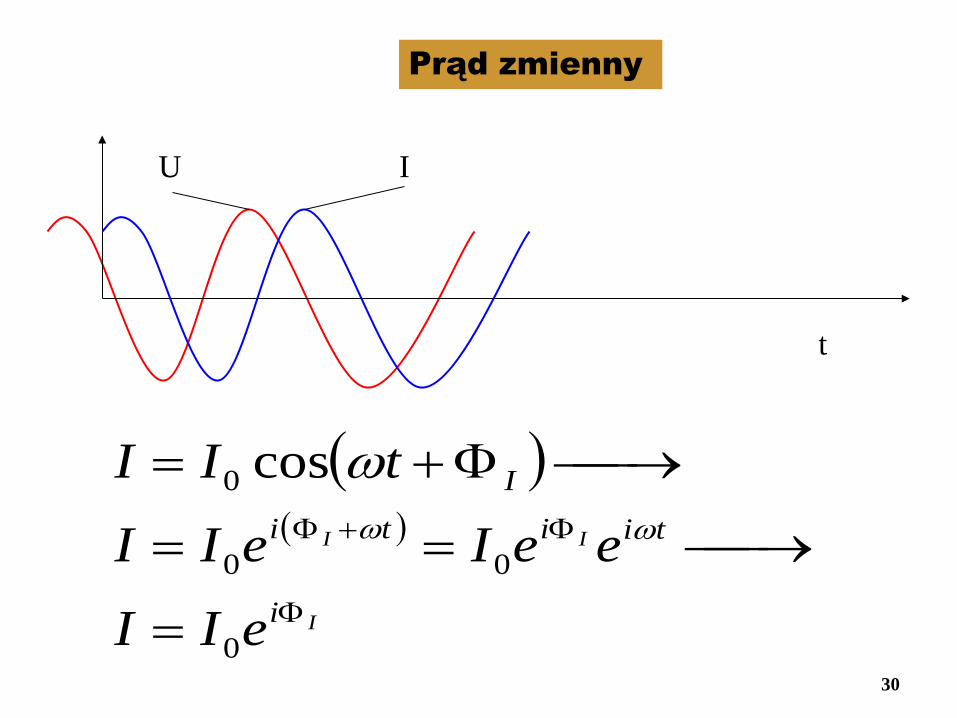
( )( )
I
II
i
tiitiI
eII
eeIeII
tII
Φ
Φ+Φ
=
→==
→Φ+=
0
00
0 cosωω
ω
U I
t
Prąd zmienny
30
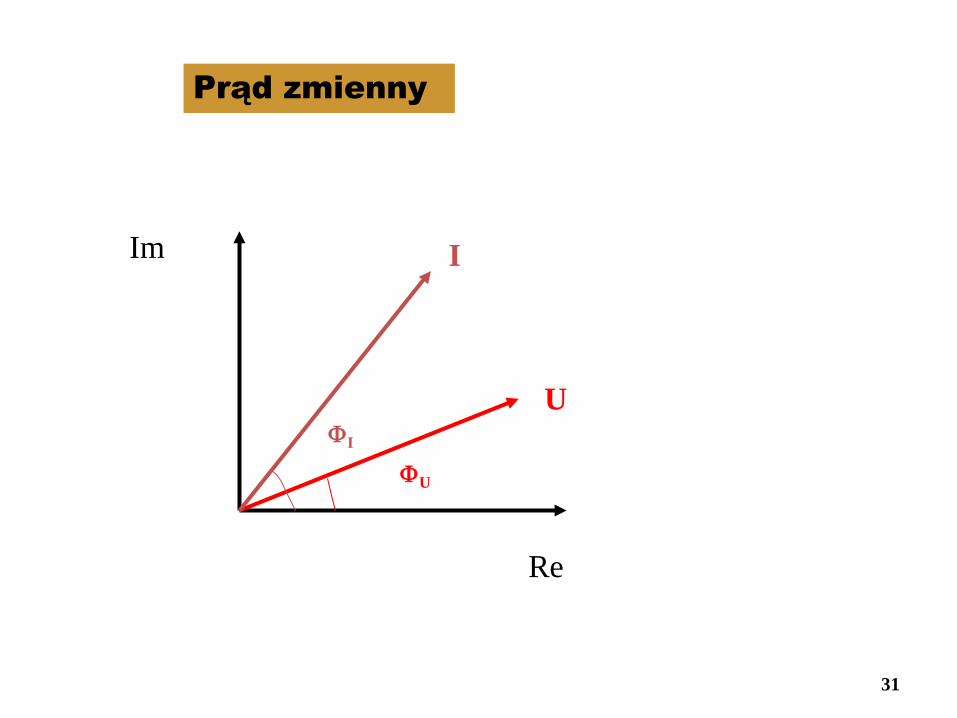
Prąd zmienny
Re
Im
U
I
ΦU
ΦI
31
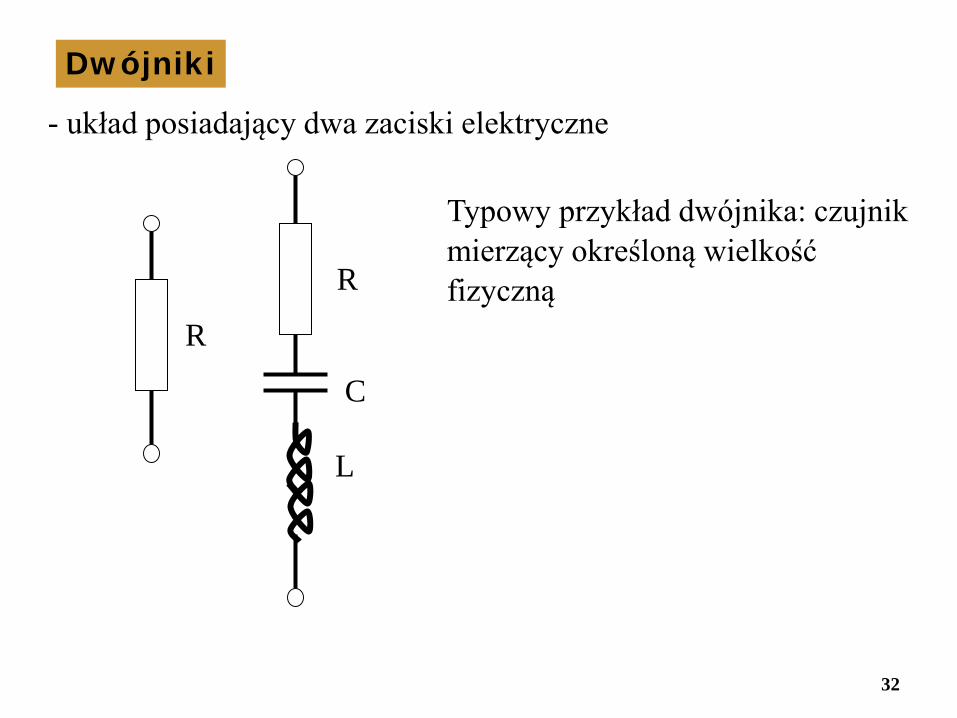
Dwójniki
- układ posiadający dwa zaciski elektryczne
R
L
C
R
Typowy przykład dwójnika: czujnik mierzący określoną wielkość fizyczną
32
Parametry wejściowe – wymuszenie
Parametry wyjściowe – odpowiedź układu na określone wymuszenie
( )iPIFU ,=
parametr wyjściowy
parametr wejściowy
Pi – wielkość fizyczna od których może zależeć odpowiedź układu np.: temperatura, oświetlenie, ciśnienie.
33
Ogólnie U =U(t0) może zależeć od zmiany parametrów w czasie dla -∝ <= t <= t0
t t0
Dwójniki liniowe i stacjonarne
U =U(t) odpowiedź na wymuszenie I =I(t)
-liniowy gdy:
a*U(t) odpowiedź na wymuszenie a*I(t)
U(t) = a1*U1(t) + a2*U2(t) odpowiedź na wymuszenie
I(t) = a1*I1(t) + a2*I2(t)
34
-stacjonarny:
Jeśli U(t) odpowiedzią na wymuszenie I(t) to dla
chwili t+t0 U(t+t0) jest odpowiedzią na wymuszenie I(t+t0)
Realnie istniejące elementy elektroniczne tylko w przybliżeniu liniowe i stacjonarne
35
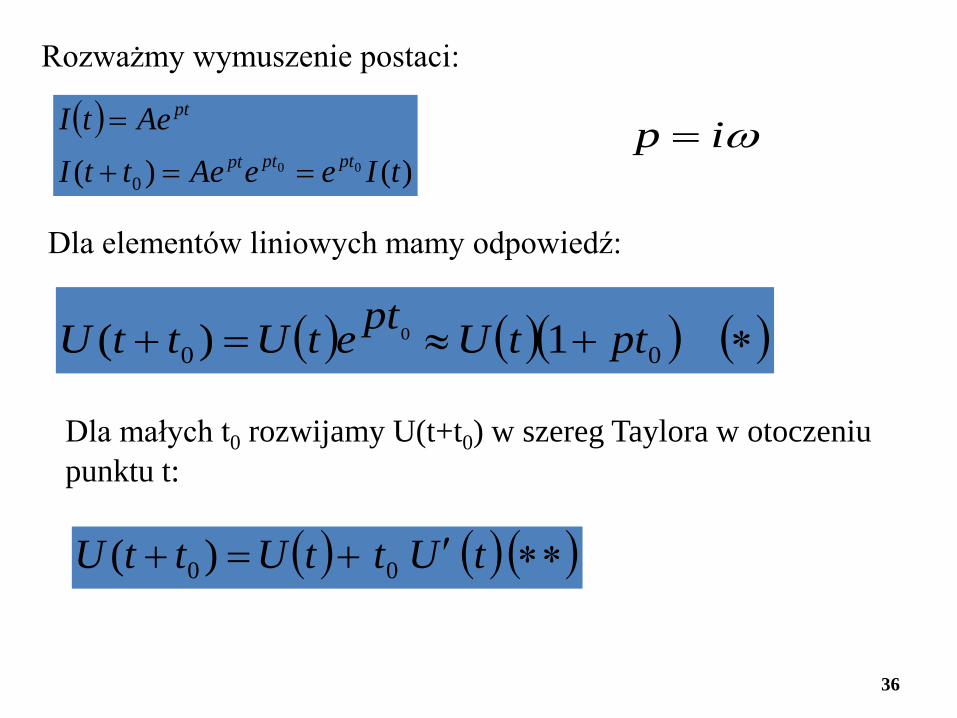
( ))()( 00
0 tIeeAettIAetI
ptptpt
pt
==+
=
Rozważmy wymuszenie postaci:
Dla elementów liniowych mamy odpowiedź:
( ) ( )( ) ( )∗+≈=+ 00 1)( 0 pttUptetUttU
Dla małych t0 rozwijamy U(t+t0) w szereg Taylora w otoczeniu punktu t:
( ) ( ) ( )∗∗′+=+ tUttUttU 00 )(
ωip =
36
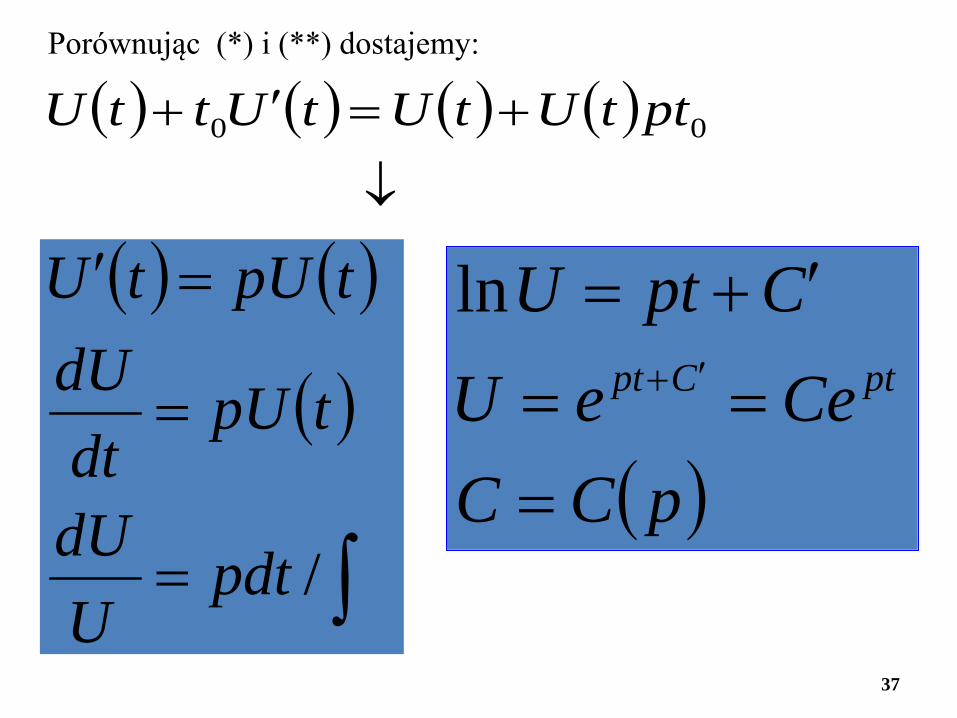
Porównując (*) i (**) dostajemy:
( ) ( ) ( ) ( )↓
+=′+ 00 pttUtUtUttU
( )pCCCeeU
CptUptCpt
===
′+=′+
ln( ) ( )
( )
∫=
=
=′
/pdtUdU
tpUdt
dUtpUtU
37
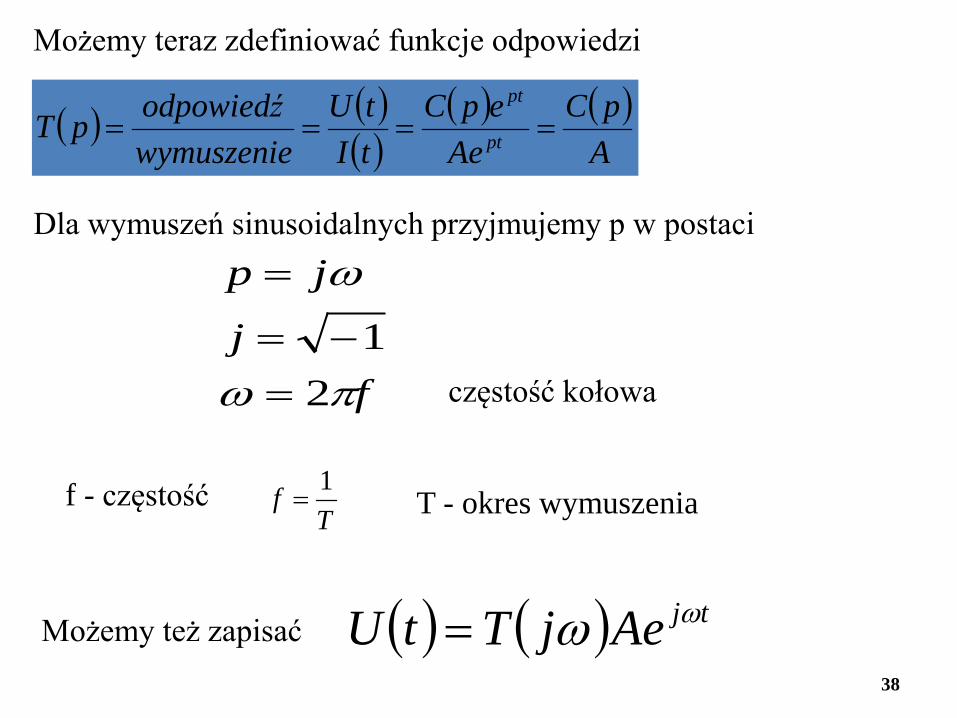
Możemy teraz zdefiniować funkcje odpowiedzi
( ) ( )( )
( ) ( )ApC
AeepC
tItU
wymuszenieodpowiedźpT pt
pt
====
Dla wymuszeń sinusoidalnych przyjmujemy p w postaci
fj
jp
πω
ω
21
=−=
=
( ) ( ) tjAejTtU ωω=
f - częstość T
f 1= T - okres wymuszenia
Możemy też zapisać
częstość kołowa
38