Embed Size (px)
DESCRIPTION
Anteproyecto de tesis
Citation preview
Seminario de titulación Anteproyecto
Universidad Autónoma de Yucatán
Facultad de Ingeniería
Ing. Mecatrónica
Seminario de Titulación
Maestra
María Milagrosa Pérez Sánchez
Anteproyecto
Diseño y construcción de una prótesis de mano funcional y de bajo costo.
Alumno
Chan May David Ernesto
Página 1
Seminario de titulación Anteproyecto
Titulo
Diseño y construcción de una prótesis de mano funcional y de bajo costo.
Introducción
Según el censo realizado por el INEGI en el año 2010 (INEGI, 2010), en México habían 5 millones 739 mil 270, que tienen algún tipo de discapacidad, lo que representa 5.1% de la población total, en donde el 45 por ciento (2 millones 582 mil) era motriz, sin especificar el tipo: personas amputadas, biamputadas, paralíticas, semipléjicas y cuadrapléjicas, entre otras.
Los accidentes que causantes de las distintas discapacidades, en la mayoría de los casos tienen como consecuencia amputaciones de las partes afectadas, comúnmente debido al daño que sufrió la parte del cuerpo afectada.
Una amputación es una condición adquirida cuyo resultado es la pérdida de una extremidad y cuya causa suele ser una lesión, una enfermedad (primaria) o una operación quirúrgica (secundaria). El paciente se enfrentará a la posibilidad de pérdida de la locomoción; invalidez permanente; cambios en sus costumbres hogareñas y quizás pérdida del trabajo (Fernández, 2013).
Toda respuesta a la amputación es altamente individual, pero, es afectada por factores como la edad; el pronóstico relativo al estado subyacente; el estado emocional y nivel de desarrollo del paciente.
Perder un miembro superior es muy traumático, pero puede ser reemplazado por algún tipo de prótesis sin embargo tratándose de la imitar la movilidad del miembro perdido se necesita hacer un estudio de la complejidad de dicho miembro. Tal es el caso de la mano humana.
La mano en su conjunto unido a la visión en 3 dimensiones, y el cerebro, han servido como motor evolutivo de la especie humana. Desde tiempos inmemorables se han estudiado en forma exhaustiva, tanto en lo anatómico, como en lo funcional; prueba de ello es que se ha llamado a la mano la “herramienta de las herramientas“.
La mano se puede definir como un órgano prensil, resultado de un conjunto estructural muy complejo, con dinámica propia, que constituye un todo funcional, formada por una serie de elementos que han evolucionado en forma casi perfecta, convirtiéndose en una herramienta indispensable en los diferentes aspectos de la vida diaria.
Está formada por 27 huesos divididos en tres grupos: el carpo, los metacarpianos y las falanges, se conecta a la muñeca a través de la palma y está dotada de veinte GDL (grados de libertad) accionados por 35 músculos, 48 nervios, y 123 ligamentos, así como también por un sistema vascular bastante completo (Quiñonez, 2005).
Página 2
Seminario de titulación Anteproyecto
Debido a que una amputación representa un traumatismo por perder un miembro, se recomienda al paciente que utilice prótesis para recuperar parte de la movilidad que este representaba y según el muñón se le indica que tipo de control debe de tener esta prótesis.
Una prótesis es una extensión artificial que reemplaza una parte faltante del cuerpo, dotado de autonomía e inteligencia.
El uso de prótesis data de tiempos inmemorables debido a accidentes o enfermedades en las que el individuo sobrevivía pero perdía algún miembro; sin embargo el factor que impulso el desarrollo de las prótesis fue para mejorar la calidad de vida de los sobrevivientes a las guerras.
La primera prótesis de miembro superior registrada data del año 2000 a. C., fue encontrada en una momia egipcia; con el manejo del hierro (218-202 a. C.), Marcus Sergius pudo construir una mano mas resistentes y que pudiera ser empleadas para portar objetos pesados.
En la búsqueda de mejoras en el año de 1400 se fabricó la mano de alt-Ruppin construida también en hierro, constaba de un pulgar rígido en oposición y dedos flexibles, los cuales eran flexionados pasivamente, éstos se podían fijar mediante un mecanismo de trinquete y además tenía una muñeca movible.
En el siglo XVI Ambroise Paré, desarrolló el primer brazo artificial móvil al nivel de codo, llamado “Le petit Loraine” el mecanismo era relativamente sencillo tomando en cuenta la época, los dedos podían abrirse o cerrarse presionando o traccionando, además de que constaba de una palanca, por medio de la cual, el brazo podía realizar la flexión o extensión a nivel de codo.
Durante el siglo XIX se empleó el cuero, los polímeros naturales y la madera en la fabricación de prótesis; los resortes contribuyen también al desarrollo de nuevos mecanismos para la fabricación de elementos de transmisión de la fuerza, para la sujeción, entre las innovaciones más importantes al diseño de las prótesis de miembro superior, se encuentra la del alemán Peter Beil. El diseño de la mano cumple con el cierre y la apertura de los dedos pero, es controlada por los movimientos del tronco y hombro contra lateral, dando origen a las prótesis autopropulsadas. E Conde Beafort dio a conocer un brazo con flexión del codo activado al presionar una palanca contra el tórax. La mano constaba de un pulgar móvil utilizando un gancho dividido sagitalmente, parecido a los actuales ganchos Hook.
En el año de 1912 Dorrance en Estados Unidos desarrolló el Hook, que es una unidad terminal que permite abrir activamente, mediante movimientos de la cintura escapular, además se cierra pasivamente por la acción de un tirante de goma. Casi al mismo tiempo fue desarrollado en Alemania el gancho Fischer cuya ventaja principal era que poseía una mayor potencia y diversidad en los tipos de prensión y sujeción de los objetos.
Página 3
Seminario de titulación Anteproyecto
Es hasta 1946 cuando se crean sistemas de propulsión asistida, dando origen a las prótesis neumáticas y eléctricas. Un sistema de propulsión asistida es aquel en el que el movimiento es activado por algún agente externo al cuerpo.
Las prótesis con mando mioeléctrico comienzan a surgir en el año de 1960 en Rusia. Esta opción protésica funciona con pequeños potenciales extraídos durante la contracción de las masas musculares del muñón, siendo estos conducidos y amplificados para obtener el movimiento de la misma. En sus inicios, este tipo de prótesis solo era colocada para amputados de antebrazo, logrando una fuerza prensora de dos kilos.
Actualmente las funciones de las prótesis de mano están limitadas al cierre y apertura de la pinza, la diferencia entre éstas radican en el tipo de control que emplean, pero todas realizan básicamente las mismas actividades.
Entre los países con mayor avance tecnológico e investigación sobre prótesis, se encuentran Alemania, Estados Unidos, Francia, Inglaterra y Japón (Dorador, 2004).
Dado que las prótesis se utilizan para sustituir la extremidad perdida de una persona, los principios de funcionamiento que se deben estudiar para reproducirlos son precisamente los que tiene dicha extremidad, por lo que el diseño de prótesis es inherentemente una actividad de la ingeniería biónica.
Teniendo en cuenta que la pérdida de un miembro superior es de los que afectan en mayor medida la capacidad de realizar trabajos complejos y precisos, se quiere construir una prótesis de mano, efectuando un estudio previo del tipo mecanismo, de materiales, sensores, actuadores, número de junturas, peso, dimensiones y funcionalidades, para realizar la construcción de un primer prototipo de prótesis activa robótica, que sea funcional, de bajo costo y de fácil adaptabilidad.
Los diseños más avanzados sobre prótesis que imiten casi en su mayoría los movimientos humanos con muy costosos, esto es debido al diseño y desarrollo de nuevas tecnologías capaces de reemplazar a los huesos y músculos humanos que comprenden la mano.
Problemática
Siempre se ha buscado crear una prótesis que puede imitar la mayoría de los movimientos del miembro que remplaza, pero esto se ve obstaculizado por el desarrollo de las tecnologías, como la de los materiales que se utiliza en el mecanismo de la prótesis, y el costo que implica desarrollar una prótesis altamente especializada.
Hoy en día las investigaciones sobre prótesis se centran en cómo hacerlas más accesibles a las personas que lo necesitan, mejorando la tecnología que se usa en ellas y disminuyendo el costo, por los materiales y componentes eléctricos y electrónicos que utiliza, por esta razón la problemática radica en el uso adecuado del mecanismo y los componentes que constituyen la prótesis.
Página 4
Seminario de titulación Anteproyecto
Objetivo Principal
Crear una prótesis de mano completamente funcional y de bajo costo que utilice la mejor tecnología disponible para hacerla accesible para las personas que lo necesiten
Objetivos Específicos
Se realizara un estudio de los mecanismos que existen actualmente y se han aplicado en prótesis de mano para verificar su viabilidad, de ser necesario se creara un nuevo diseño que cumpla con los requerimientos de movilidad y bajo costo.
Para incorporar los componentes eléctricos y electrónicos que la prótesis necesita, se realizara intentando que los componentes que se usen sean en menor número posible, que sean de bajo costo y que cumplan con un mínimo de mantenimiento posible para no afectar la comodidad del paciente.
Para finalizar el trabajo se creara la prótesis usando el mecanismo y los componentes que se han definido, esto será para comprobar la fiabilidad de la prótesis y observar problemas que se necesiten arreglar.
Antecedentes
En términos generales una prótesis (dentro del ámbito medico), es una extensión artificial que reemplaza una parte faltante del cuerpo.
Considerando la definición citada en el párrafo anterior, podemos definir a una prótesis robótica, como un elemento artificial dotado de cierta autonomía e inteligencia capaz de realizar una función de una parte faltante del cuerpo. Dicha autonomía e inteligencia se logra al integrar sensores, procesadores, actuadores, y complejos algoritmos de control (Puglisi, 2010).
El desarrollo de prótesis, involucra la necesidad de fusionar conocimientos de la fisiología y biomecánica humana, mecanizado de materiales y prototipado de mecanismos, interface hombre-máquina.
Hacer una prótesis robótica de una calidad aceptable requiere de un enorme esfuerzo, no solo en el campo de la mecatrónica si no también en neurociencia, ingeniería eléctrica, ciencias cognitivas, procesamiento de señales, diseño de baterías, nano-tecnología, y ciencias del comportamiento (Puglisi, 2010).
Para obtener una prótesis que emule en buena forma la dinámica del miembro amputado es necesario que el diseño satisfaga ciertas especificaciones, como lo son:
Tamaño y Masa: Las dimensiones de la prótesis deben ser las mismas que las del miembro que sustituyen. Por otro lado, la masa debe ser igual o menor a la del miembro amputado para que el portador pueda manipularla
Página 5
Seminario de titulación Anteproyecto
con facilidad y no haga esfuerzos extraordinarios que puedan dañar los músculos que soportan la prótesis.
Velocidad y Torque. La prótesis debe capturar completamente el comportamiento torque velocidad del miembro que sustituye.
Baterías. La duración de las baterías de una prótesis robótica debe permitir un funcionamiento de al menos 16 hrs para que el usuario no tenga problemas de insuficiencia de energía durante las actividades diarias.
Ancho de Banda del Torque. El ancho de banda de una prótesis es la frecuencia a la que se debe actualizar el torque aplicado en el mecanismo de accionamiento de tal manera que el caminado sea natural.
Realimentación al Usuario. La prótesis debe realimentar al usuario que la prótesis a tenido contacto con el ambiente y también la intensidad del contacto. Esto podría ser solucionado mediante interfaces hápticas o utilizando señales eléctricas. Una de las principales limitaciones por la cual el desarrollo de prótesis robóticas comerciales no se afincado es el relativamente pequeño número de personas que lo necesitan. Debido a eso puede resultar que una prótesis de elevado número de grados de libertad (e.g., un brazo de 25 gdl) sea muy costosa y prácticamente incosteable para la mayoría de la gente.
Considerando la función que realiza y dado la importancia de ellas, se pueden hacer una gran distinción entre las prótesis motoras del resto de las demás. Dentro de las prótesis motoras, se puede hablar prótesis de miembros superior (hombros, brazos, manos) y prótesis de miembros inferiores (cadera, piernas, pies) (Puglisi, 2010).
Desde el punto de vista de acción, se pueden clasificar como prótesis Pasivas o Activas. Es decir, si poseen un elemento que requiere de energía adicional para realizar su acción o no, como por ejemplo un motor. Por su contraparte, una prótesis pasiva no posee elementos activos. Por lo general, las prótesis pasivas de locomoción están basadas en el empleo de resortes.
Respecto al modo de control, se puede considerar aquellas prótesis que son accionadas mediante el uso de interruptores o comandos preprogramados, o aquellas que responden a la voluntad humana empleando alguna señal biológica (Electromiografía, Electroencefalografía, etc.) (Puglisi, 2010).
Prótesis No Robotizadas
Este tipo de prótesis son las más comerciales y de uso común. La actuación proviene de fuerzas ejercidas por el usuario ya se por el movimiento relativo de algunas partes del cuerpo o por la inercia del mismo (Puglisi, 2010).
Prótesis Robotizadas
Página 6
Seminario de titulación Anteproyecto
En esta subsección se presentan algunas prótesis robotizadas que ya son comerciales y otras que están en fase de investigación. Aquí se caracterizan como prótesis robóticas aquellas que tiene una fuente de energía propia, un actuador, y sensores que permiten leer los movimientos deseados por el usuario. Por lo tanto también se requiere un sistema de procesamiento de esas señales (aun en su forma más básica) para poder convertir esas señales en movimientos de los actuadores. En esta definición no es necesario que el sistema provea de retroalimentación al usuario. Sin embargo en la mayoría de las prótesis la realimentación se realiza a través de la vista (Puglisi, 2010).
Prótesis mioeléctricas
Se desarrollan a finales de los años 50 el mayor desarrollo fue en los años 80; se las define como aquellas que aprovechan los potenciales de acción (Electro-fisiología; Musculo); generados por músculos, con un amplificador transistorizado se cierran relés que hacen funcionar (mediante micro motores eléctricos) los dedos de la mano de la prótesis en concordancia con Océano en su Enciclopedia de Ciencia y de la Técnica (Subia, 2010).
Estos miembros artificiales responden a impulsos nerviosos y a las contracciones musculares de los músculos del antebrazo permitiendo movimientos de flexión y extensión. Comparando la fuerza alcanzada y la precisión es considerable la rapidez de los dedos y el peso. Anteriormente solo eran capaces de abrir y cerrar la mano, este tipo de prótesis.
Las prótesis de mano son las más importantes debido a que representan una herramienta necesaria en nuestra vida cotidiana.
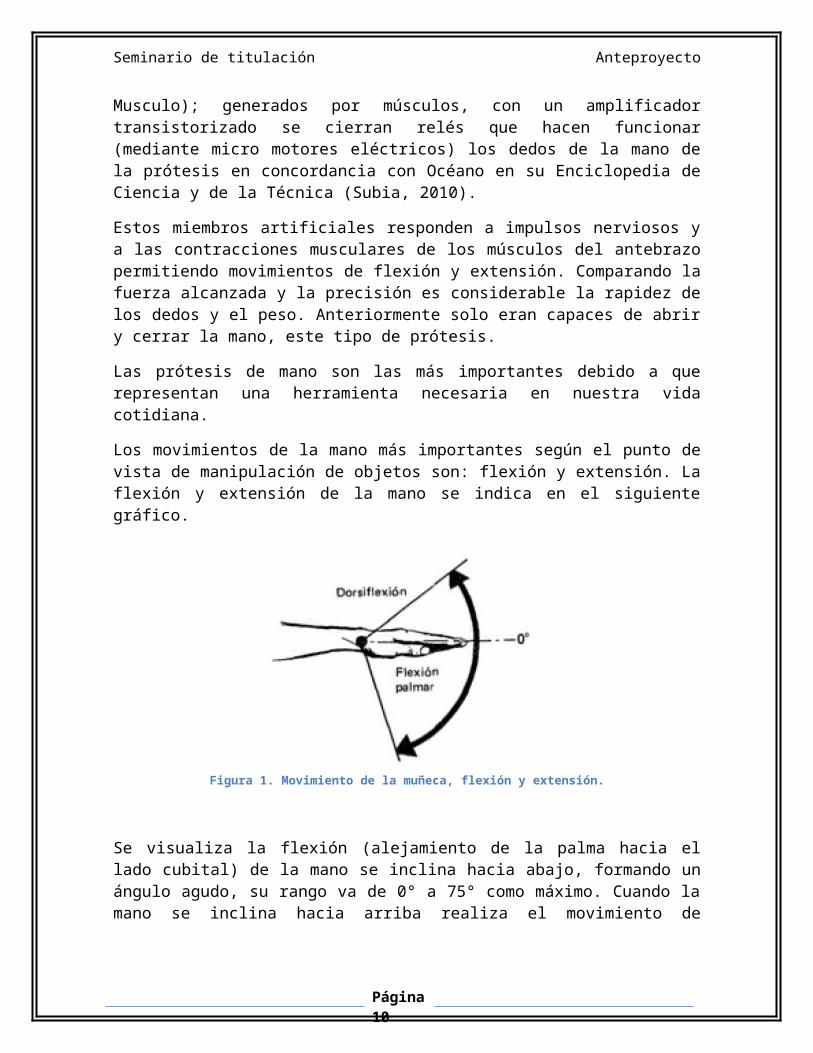
Los movimientos de la mano más importantes según el punto de vista de manipulación de objetos son: flexión y extensión. La flexión y extensión de la mano se indica en el siguiente gráfico.
Figura 1. Movimiento de la muñeca, flexión y extensión.
Página 7
Seminario de titulación Anteproyecto
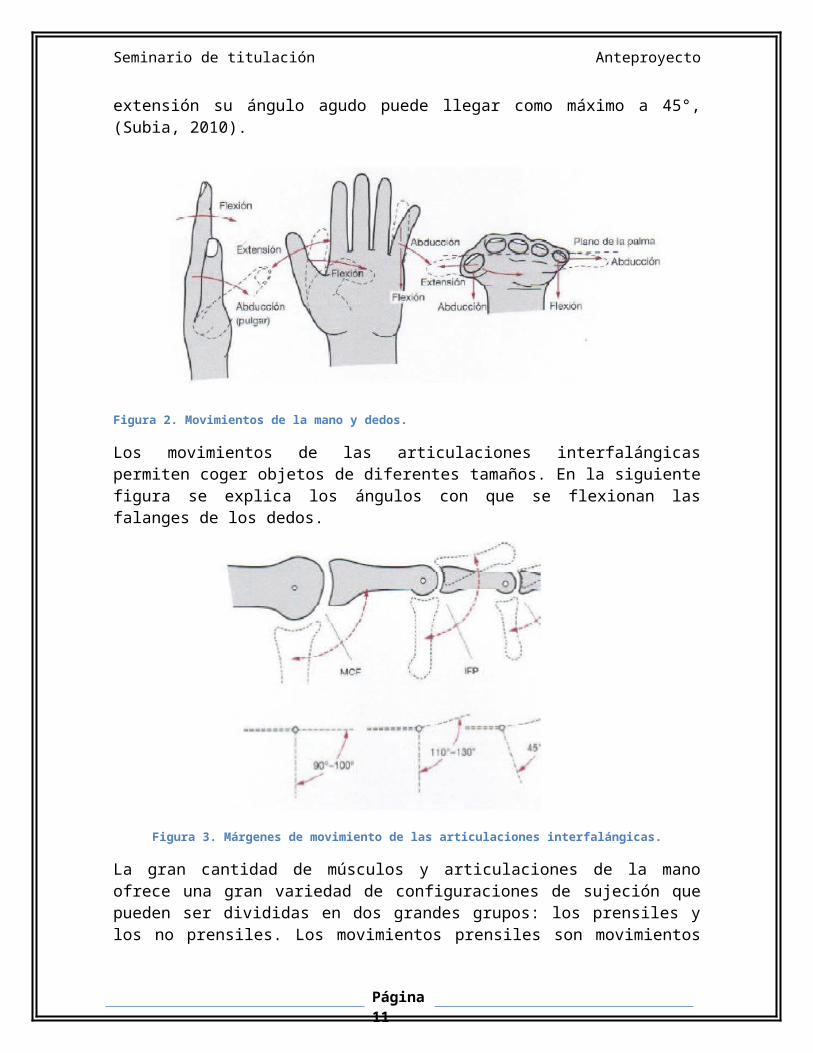
Se visualiza la flexión (alejamiento de la palma hacia el lado cubital) de la mano se inclina hacia abajo, formando un ángulo agudo, su rango va de 0° a 75° como máximo. Cuando la mano se inclina hacia arriba realiza el movimiento de extensión su ángulo agudo puede llegar como máximo a 45°, (Subia, 2010).
Figura 2. Movimientos de la mano y dedos.
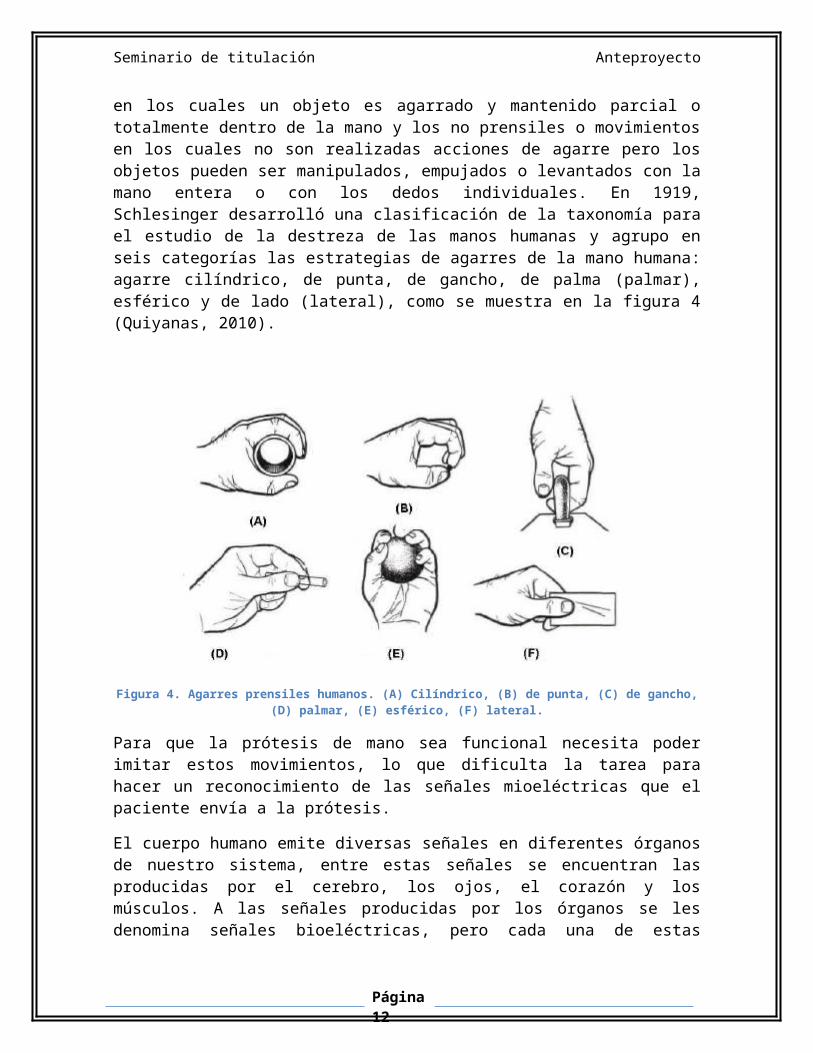
Los movimientos de las articulaciones interfalángicas permiten coger objetos de diferentes tamaños. En la siguiente figura se explica los ángulos con que se flexionan las falanges de los dedos.
Figura 3. Márgenes de movimiento de las articulaciones interfalángicas.
La gran cantidad de músculos y articulaciones de la mano ofrece una gran variedad de configuraciones de sujeción que pueden ser divididas en dos grandes grupos: los prensiles y los no prensiles. Los movimientos prensiles son movimientos en los cuales un objeto es agarrado y mantenido parcial o totalmente dentro de la mano y los no prensiles o movimientos en los cuales no son
Página 8
Seminario de titulación Anteproyecto
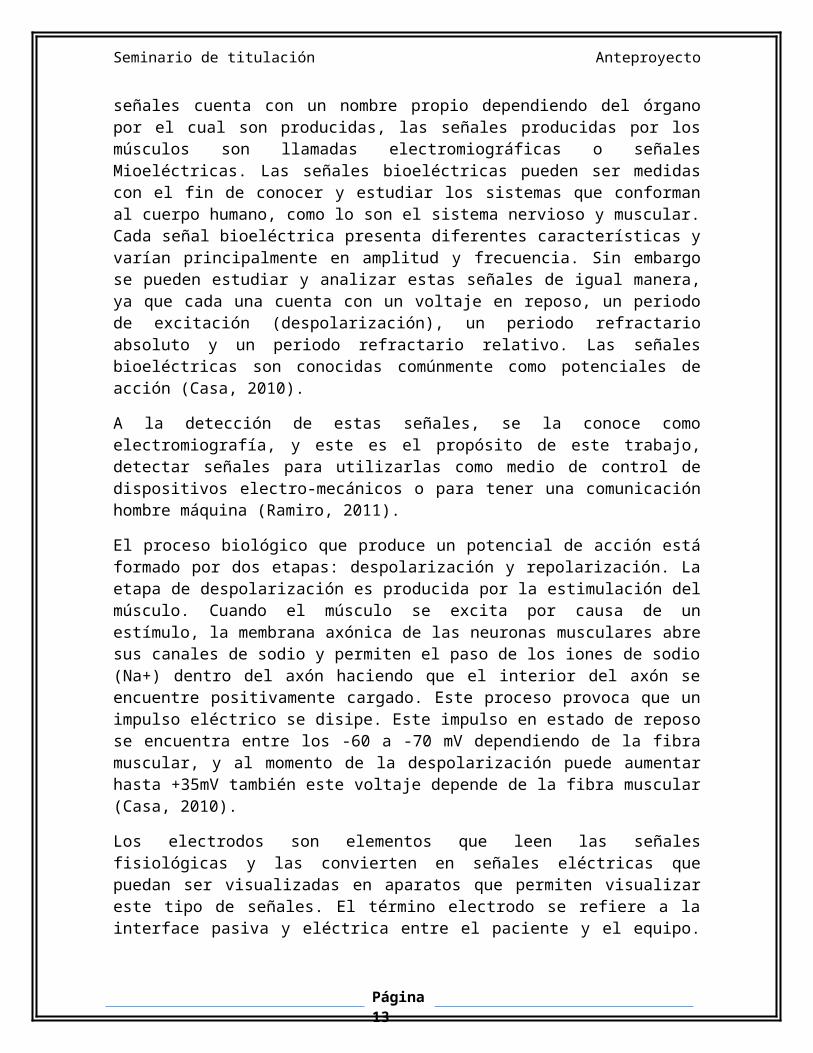
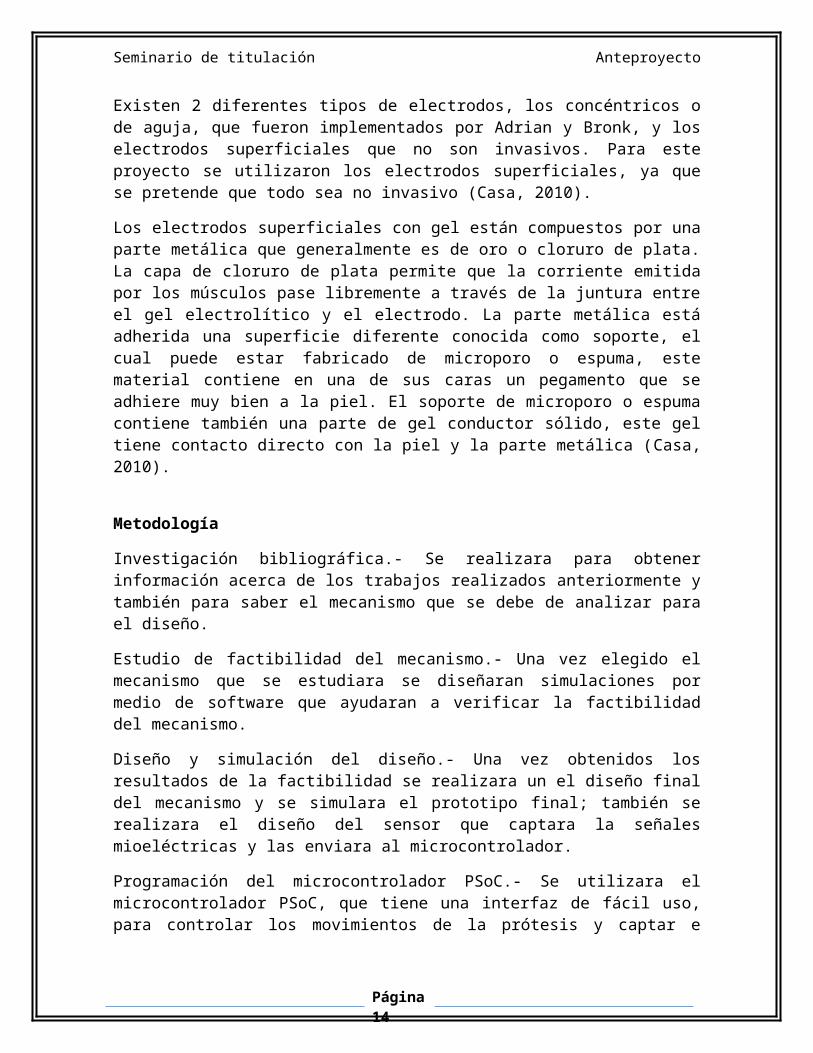
realizadas acciones de agarre pero los objetos pueden ser manipulados, empujados o levantados con la mano entera o con los dedos individuales. En 1919, Schlesinger desarrolló una clasificación de la taxonomía para el estudio de la destreza de las manos humanas y agrupo en seis categorías las estrategias de agarres de la mano humana: agarre cilíndrico, de punta, de gancho, de palma (palmar), esférico y de lado (lateral), como se muestra en la figura 4 (Quiyanas, 2010).
Figura 4. Agarres prensiles humanos. (A) Cilíndrico, (B) de punta, (C) de gancho, (D) palmar, (E) esférico, (F) lateral.
Para que la prótesis de mano sea funcional necesita poder imitar estos movimientos, lo que dificulta la tarea para hacer un reconocimiento de las señales mioeléctricas que el paciente envía a la prótesis.
El cuerpo humano emite diversas señales en diferentes órganos de nuestro sistema, entre estas señales se encuentran las producidas por el cerebro, los ojos, el corazón y los músculos. A las señales producidas por los órganos se les denomina señales bioeléctricas, pero cada una de estas señales cuenta con un nombre propio dependiendo del órgano por el cual son producidas, las señales producidas por los músculos son llamadas electromiográficas o señales Mioeléctricas. Las señales bioeléctricas pueden ser medidas con el fin de conocer y estudiar los sistemas que conforman al cuerpo humano, como lo son el sistema nervioso y muscular. Cada señal bioeléctrica presenta diferentes características y varían principalmente en amplitud y frecuencia. Sin embargo se pueden estudiar y analizar estas señales de igual manera, ya que cada una cuenta con un voltaje en reposo, un periodo de excitación (despolarización), un periodo refractario absoluto y un periodo refractario relativo. Las señales bioeléctricas son conocidas comúnmente como potenciales de acción (Casa, 2010).
Página 9
Seminario de titulación Anteproyecto
A la detección de estas señales, se la conoce como electromiografía, y este es el propósito de este trabajo, detectar señales para utilizarlas como medio de control de dispositivos electro-mecánicos o para tener una comunicación hombre máquina (Ramiro, 2011).
El proceso biológico que produce un potencial de acción está formado por dos etapas: despolarización y repolarización. La etapa de despolarización es producida por la estimulación del músculo. Cuando el músculo se excita por causa de un estímulo, la membrana axónica de las neuronas musculares abre sus canales de sodio y permiten el paso de los iones de sodio (Na+) dentro del axón haciendo que el interior del axón se encuentre positivamente cargado. Este proceso provoca que un impulso eléctrico se disipe. Este impulso en estado de reposo se encuentra entre los -60 a -70 mV dependiendo de la fibra muscular, y al momento de la despolarización puede aumentar hasta +35mV también este voltaje depende de la fibra muscular (Casa, 2010).
Los electrodos son elementos que leen las señales fisiológicas y las convierten en señales eléctricas que puedan ser visualizadas en aparatos que permiten visualizar este tipo de señales. El término electrodo se refiere a la interface pasiva y eléctrica entre el paciente y el equipo. Existen 2 diferentes tipos de electrodos, los concéntricos o de aguja, que fueron implementados por Adrian y Bronk, y los electrodos superficiales que no son invasivos. Para este proyecto se utilizaron los electrodos superficiales, ya que se pretende que todo sea no invasivo (Casa, 2010).
Los electrodos superficiales con gel están compuestos por una parte metálica que generalmente es de oro o cloruro de plata. La capa de cloruro de plata permite que la corriente emitida por los músculos pase libremente a través de la juntura entre el gel electrolítico y el electrodo. La parte metálica está adherida una superficie diferente conocida como soporte, el cual puede estar fabricado de microporo o espuma, este material contiene en una de sus caras un pegamento que se adhiere muy bien a la piel. El soporte de microporo o espuma contiene también una parte de gel conductor sólido, este gel tiene contacto directo con la piel y la parte metálica (Casa, 2010).
Metodología
Investigación bibliográfica.- Se realizara para obtener información acerca de los trabajos realizados anteriormente y también para saber el mecanismo que se debe de analizar para el diseño.
Estudio de factibilidad del mecanismo.- Una vez elegido el mecanismo que se estudiara se diseñaran simulaciones por medio de software que ayudaran a verificar la factibilidad del mecanismo.
Diseño y simulación del diseño.- Una vez obtenidos los resultados de la factibilidad se realizara un el diseño final del mecanismo y se simulara el prototipo final;
Página 10
Seminario de titulación Anteproyecto
también se realizara el diseño del sensor que captara la señales mioeléctricas y las enviara al microcontrolador.
Programación del microcontrolador PSoC.- Se utilizara el microcontrolador PSoC, que tiene una interfaz de fácil uso, para controlar los movimientos de la prótesis y captar e interpretar las señales mioeléctricas que le proporcionaran los sensores.
Incorporación de los elementos eléctricos y electrónicos.- Se terminara el diseño de la prótesis de mano añadiendo los componentes necesarios.
Cronograma de Actividades
Actividades Mes 1 Mes 2 Mes 3 Mes 4 Mes5 Mes 6 Mes 7 Mes 8
Revisión bibliográficaEstudio de factibilidad del mecanismoSimulación del mecanismoConstrucción del mecanismoDiseño y pruebas del sensor mioeléctricoElección de los componentes electrónicosProgramación y pruebas con el microcontroladorConstrucción del mecanismoPruebas finalesAjustes de la prótesis finalRedacción del proyecto y conclusiones
Página 11
Seminario de titulación Anteproyecto
Índice Tentativo
Índice de figuras
Índice de tablas
Prólogo
Introducción
Capítulo 1.- Marco Teórico1.1. ¿Qué es una prótesis?1.2. ¿Qué es un señal mioeléctrica? 1.3. Problemática.1.4. Objetivos.
Capítulo 2.- Metodología2.1. Análisis de requerimientos del proyecto.2.2. Estudio de la factibilidad del mecanismo2.3. Diseño y simulación del prototipo.2.4. Programación del microcontrolador PSoC.2.5. Incorporación de los elementos eléctricos y electrónicos
en el prototipo.
Capítulo 3.- Funciones del sistema mecánico3.1. Descripción del sistema mecánico.
3.1.1. Restricciones.3.1.2. Seguridad.3.1.3. Consumo energético.
3.2. Ubicación de sensores y circuitos.
Capítulo 4.- Programación4.1. Algoritmo de programación del controlador de la
prótesis.4.2. Algoritmo de programación de la adquisición de señales
mioeléctrica.4.3. Algoritmo de programación de la interfaz de usuario.4.4. Algoritmo de programación de la los sensores.
Capítulo 5.- Construcción del prototipo 5.1. Diseño mecánico. 5.2. Circuito de adquisición de la señal mioeléctrica.5.3. Sensores y actuadores.5.4. Sistema de control.
Página 12
Seminario de titulación Anteproyecto
5.5. Software Embebido.5.6. Sistema eléctrico.
Capítulo 6.- Pruebas y resultados6.1. Pruebas de agarre.6.2. Pruebas de resistencia.6.3. Consumo energético.6.2. Resultados obtenidos.6.3. Análisis e interpretación de los resultados.
Conclusión
Anexos
Referencias
Referencias
Casa Terrazas K., Cruz Rodríguez M. (2010). Sistema de adquisición y procesamiento de las señales mioeléctricas. Ingeniero en sistemas digitales y comunicaciones. La Universidad autónoma de ciudad Juárez. Ciudad Juárez, Chihuahua, México.
Dorador González J. (2004). Robótica y prótesis inteligentes. Revista digital universitaria, 6, 15.
Fernández Mendoza O., González Moreno A. (2013). Cirugía Radical en el Aparato Locomotor. Extraído el día 14 de octubre de 2013, desde http://www.sld.cu/galerias/pdf/sitios/rehabilitacion-doc/clase18.pdf.
INEGI. (2010) Discapacidad en México. Extraído el día 14 de octubre de 2013, desde http://cuentame.inegi.org.mx/poblacion/discapacidad.aspx.
Puglisi L., Moreno H. (2010). Prótesis robóticas. Departamento de Automática, Ingeniería electrónica e Informática Industrial. Universidad Politécnica de Madrid. Madrid, España.
Quiñonez P. (2005). Cirugía de la mano. Fondo documental electrónico de FUNDACITE Aragua. Maracay.
Quiyanas Burgos C. (2010). Diseño y construcción de una prótesis robótica de mano funcional adaptada a varios agarres. Maestría en Automática. Universidad del Cauca. Popayán.
Ramiro Ramos M., Vergara Betancourt A., Vázquez Gerónimo G., Hernández García E., Juárez Ramiro L. (2011). Memorias del 10º Congreso Nacional de Mecatrónica. (pp. 174-178). Puerto Vallarta, Jalisco.
Página 13
Seminario de titulación Anteproyecto
Rosagel S. (2011). Prótesis mexicanas son más baratas. Extraído el día 14 de octubre de 2013, desde http://www.cnnexpansion.com/manufactura/2011/11/17/protesis-mexicanas-son-mas-barata.
Subía Contento L. (2010). Prototipo de prótesis robótica para la mano. Tesis de Licenciatura Mecatrónica. Universidad Tecnológica Equinoccial. Quito, Ecuador.
Página 14