Instituto Tecnolgico de Hermosillo.INGENIERIA MECATRONICA
SISTEMAS INTELIGENTES
PRACTICASISTEMA DE VISION ARTIFICIAL
Elaborado por:
LPEZ LPEZ OCTAVIOMARIO GUMARO DUARTE PERALTA
Profesor de la asignatura:EDUARDO CHAVEZ MENDIOLA
Hermosillo, Son., 12 de junio del 2012
INDICE PAGINA1. RESUMEN.32. INTRODUCCION..42.1. Problema a
investigar..42.2. Importancia del estudio...42.3. Hiptesis..43.
MARCO TEORICO...53.1. Adquisicin de imgenes.53.2. Caractersticas
cuantitativas anlisis estadstico de la imagen .53.3. Utilizando
MatLab ..63.3.1. Interfaz de MatLab......63.4. Estructura bsica de
instrucciones de matlab...63.5. Comprender y observar63.6. Creando
una imagen binaria 73.7. Imagen en escala de grises...73.8. Cursor
de datos.73.9. Umbral. 73.10. Archivos M .. 73.11. Funciones..
83.12. Adquisicin de imgenes ..83.13. Utilizando el toolbox de
visin con matlab.. 83.14. Obtencin de la informacin del dispositivo
83.15. Captura de la imagen en Matlab .. 93.16. Preparacin del
dispositivo...94. METODOLOGIA.105. RESULTADOS.116.
CONCLUSIONES.247. REFERENCIAS BIBLIOGRAFICAS..25
1. RESUMENDeteccin de patrones dentro de un entorno mediante el
uso de MATLAB.Octavio Lopez L., Instituto Tecnolgico de
Hermosillo.Mario G. Duarte P. Instituto Tecnolgico de
Hermosillo.Este proyecto est enfocado a la deteccin de patrones
mediante visin artificial utilizando un software especial llamado
Matlab. Con este software fue posible el poder programar y
controlar un dispositivo parecido a un carro de control remoto al
cual se le mont una cmara para la deteccin de figuras (en este caso
un cuadrado) mediante esta deteccin de figuras el dispositivo pudo
seguir a la figura dependiendo de su posicin, esta decisin tomada
en base al umbralamiento y gracias al reconocimiento de patrones
proporcionado por Matlab.En el proceso de la realizacin del
proyecto se llevaron a cabo bastantes pruebas con las cuales se
determin y se definieron la mayora de los parmetros para el
funcionamiento de este, as como el que figura geomtrica detectar,
el rea (en pixeles) de deteccin del cuadrado, etc.El dispositivo se
introdujo en un entorno completamente blanco y fue ah con todo
exito donde detect el color negro para as no perderse dentro se le
puso de frente la figura y este lo sigui sin ningn problema.
2. INTRODUCCION.El siguiente reporte tiene como objetivo el de
ensear el uso del procesamiento de imgenes y reconocimiento de
patrones con Matlab mediante una cmara con la cual se detecta una
figura en particular y con ella un dispositivo en forma de carro
mencionado previamente toma la decisin de seguirlo hacia donde este
objeto de color negro se encuentre dentro de un entorno
completamente blanco, ya sea hacia delante o hacia cualquiera de
los dos lados.A continuacin se mostrara a detalle cmo se realiz
este trabajo, tanto su construccin, como su programacin, las
complicaciones que se tuvieron durante la realizacin de este, as
como tambin despus de terminado ya el dispositivo y su
programacin.
2.1. Problema a investigar.El Siguiente problema es el de poder
construir un dispositivo de visin artificial el cual detecte
patrones especficamente esquinas de una figura por medio de una
cmara y como complemento el seguirlo a manera de carro hacia donde
se le coloque el objeto (en este caso cuadrado). Cmo se disear este
sistema de visin?Este sistema de visin ser diseado mediante un
software especializado Matlab, que cuenta con una caja de
herramientas especfica para este tipo de aplicaciones. Por qu se
construir este sistema de visin artificial?Este sistema de visin
artificial ser construido con el fin de as poder guiar a un
dispositivo con ruedas hacia un objeto con la finalidad de que lo
reconozca, enfocndose ms a la deteccin de patrones que hoy en la
actualidad muchas empresas lo utilizan para la deteccin de
fallos.
2.2. Importancia del estudio.La importancia que este estudio
tiene hasta ahorita es de carcter estudiantil, pero de igual forma
la aplicacin que este estudio tiene puede abarcar amplias reas en
las cuales la visin artificial pueda ser aplicada de una forma en
la cual sea de gran ayuda en muchos procesos, ya sea de produccin o
de bsqueda, este tipo de sistemas inteligentes hoy en la actualidad
son de gran importancia en la industria, y es por tal, que es ahora
el momento correcto de que esto se ponga a prueba la construccin de
estos en escuelas, ya que con esto se refuerza el conocimiento que
podra ser aplicado a la vida real.
2.3. HiptesisTodo el sistema en conjunto ser capaz de poder
seguir algn patrn por medio de un tipo seguidor, en el cual la
cmara va montada se comunica con la computadora, en la cual se
monitorea y detecta hacia donde y como se mueve el carro,
3. MARCO TEORICO.Antes de empezar con la metodologa se tienen
que comprender ciertos trminos para as entender por completo el
funcionamiento y caractersticas del sistema.1. Adquisicin de la
imagen: esta consiste en una videocmara web, o una cmara analgica
con una interface de conexin para el procesamiento.2.
Procesamiento: esta parte consiste en una computadora personal que
est dedicada al procesamiento de imagen.3. Anlisis de la imagen: Un
conjunto de herramientas usadas para analizar el contenido de la
imagen capturada y encontrar la posicin de un objeto.
3.1. Adquisicin de imgenes La adquisicin de imgenes puede ser
usando una cmara de video que utilice diferentes tipos de
resoluciones, en esta caso de 320 x 240 pixeles, para esto se
tienen dos tipos de cmaras disponibles, cmaras digitales tipo CCD o
cmaras analgicas.Las cmaras digitales generalmente tienen una
interfaz de conexin a la computadora por puerto USB.Requerimientos
de alimentacin: las cmaras CCD dan como resultado imgenes de alta
calidad con poco ruido. Estas generan una seal analgica que
utilizan un convertidor analgico digital y por lo tanto requieren
un consumo alto de energa.El anlisis de la imagen consiste en
extraer informacin til a partir de las imgenes capturadas. En
primer lugar se deben de definir las caractersticas del objeto
haciendo una bsqueda de la imagen. Estas caractersticas del objeto
deben ser lo ms solidas posibles. Generalmente con el fin de
rastrear o identificar el objeto que se est utilizando, estas
caractersticas son:A) ColorB) Intensidad C) Textura o patrn D)
Bordes circulares, rayas verticales o rayas rectasE) Estructura,
alineacin de los objetos de una manera especifica
3.2. Caractersticas cuantitativas anlisis estadstico de la
imagen.A) Centro de gravedad. Punto donde los pixeles deseados
pueden estar equilibrados.B) Numero de pixeles. Es un nmero alto de
pixeles que indica la presencia de un objeto.C) BLOB, es el rea de
pixeles conectada.Matlab proporciona una plataforma muy fcil de
usar para la adquisicin y procesamiento de imgenes. Incluso los
puertos serie y paralelo se pueden acceder directamente en
matlab.Matlab sirve como una herramienta til para los VCM.
Proporcionan una poderosa biblioteca, integrada de muchas funciones
tiles para el procesamiento de la imagen.
3.3. Utilizando Matlab.Matlab provee un conjunto de libreras que
soportan areas de la ingeniera y la ciencia y la simulacin.3.3.1.
Interfaz de matlab.Cuando damos doble clic en el icono de matlab
podemos observar 3 ventanas: comand window, work space, y command
history. Comand window.Esta ventana sirve para describir los
comandos y observar los resultados. Work space.Esta ventana muestra
las variables definidas dentro de la sesin abierta de matlab.
Command history.En esta ventana se almacena una lista de todos los
comandos que se han utilizado as como una referencia rpida de cada
uno de ellos.
3.4. Estructura bsica de instrucciones de matlab.Dentro de
matlab, las variables pueden almacenar matrices asi como tambin se
pueden definir para nmeros enteros, nmeros reales o nmeros
complejos. Tambin las matrices pueden ser ensambladas en
estructuras de arreglos de datos.3.5. Comprender y observar Dentro
de matlab la imagen se almacena en una matriz de dos dimensiones,
donde dicha matriz contiene los valores de la intensidad y brillo
de los pixeles. Un pixel es el punto ms pequeo en una imagen que
puede mostrarse en la pantalla, la resolucin de la imagen es igual
al nmero de pixeles que pueden ser mostrados en una cuadricula
donde las unidades son pulgadas dentro de la pantalla del
monitor.Para ver realmente los valores almacenados en la matriz
conviene activar los siguientes comandos:>> im(1:10,
1:10)>> figure, imshow(50:150,50;150);
3.6. Creando una imagen binaria.Imagen binaria.Una imagen que
contiene solo blanco y negro se le considera una imagen binaria.Por
ejemplo:>> imbin= [0 1; 1 0]>> Figure, imshow (imbin,
initialmagnification, fit);El negro indica intensidad 0 y el blanco
indica intensidad mxima (1)3.7. Imagen en escala de grises.Una
imagen en escala de grises contiene valores de intensidades en un
rango o intervalo de un cero a un mximo, incluyendo el negro y el
blanco normalmente este intervalo se encuentra entre 0 y 255. Asi
los valores cercanos a cero son los tonos oscuros de gris, mientras
que los valores cercanos a 255 indican un gris claro.Por
ejemplo:>> imgray= [0.0 0.2 0.4 0.8 1.0]>> figure,
imshow (uint8(imgray); initialmagnification, fit);
3.8. Cursor de datos.Para ver los colores en la ventana de la
figura se tiene una opcin en la barra de herramientas que se llama
cursor de datos, el cual al estar activado si hacemos un clic en la
imagen sobre cualquier punto, podremos ver los valores de RGB por
pixeles en la imagen en posiciones X, Y.3.9. Umbral.Una imagen en
escala de brises se puede convertir en una imagen binaria pasando
por un proceso llamado umbral, el toolbox de procesamiento de
imgenes proporciona una funcin.
3.10. Archivos M.Matlab proporciona una facilidad para ejecutar
mltiples secuencias de comandos con una sola instruccin. Esto se
hace escribiendo el nombre de un archivo extensin .m. es decir se
puede crear una funcin en la que manualmente se escriban todos los
comandos y se guarden dentro de una funcin en matlab.Hay que
recordar que en matlab se pueden crear comentarios los cuales
sirven como una herramienta til para poner informacin al momento de
ir ejecutando un programa, esto se logra utilizando el smbolo de
%.
3.11. Funciones.Las funciones ayudan a escribir de manera
organizada el cogido, con un minimo de repeticiones lgicas.
Mientras escribe los archivos m, sucede a menudo que un conjunto de
instrucciones comunes se utilizan dentro un programa. En lugar de
escribir nuevamente el conjunto de instrucciones que se necesita
dentro del programa, esto se puede simplificar definiendo una
funcin donde tienen que pasar los datos dentro de la funcin, para
devolver un resultado.3.12. Adquisicin de imgenes.Antes de
continuar con el tema es conveniente revisar el apoyo prestado por
la caja de herramientas de ADI de matlab.Hoy en dia la mayora de
las cmaras estn disponibles con una interfaz USB. Una vez que esta
instalado el controlador de la cmara la computadora detecta el
dispositivo cada vez que se conecta. Por otra parte se tiene una
cmara de video digital o una cmara CCD deben estar relacionados con
una tarjeta de adquisicin de video que hace la funcin de interfaz
con la computadora por lo lo que el sistema operativo de Windows
detecta automticamente el dispositivo.Con el fin de ejecutar las
instrucciones tradicionales de procesamiento de imgenes es
necesario utilizar una cmara web USB funcional conectada a su
PC.3.13. Utiliando el toolbox de visin con matlab.Resulta de suma
utilidad para implementar algoritmos de visin o adquisicin de
imgenes en tiempo real utilizando dispositivos simples y de bajo
costo tales como las webcams. Matlab incluye el toolbox "Image
Acquisition" para este fin.
3.14. Obtencion de la informacin del dispositivo.
Imaqhwinfo Devuelve la informacin del hardware y software
disponibles, tales como: Adaptador de video instalado, versin de
Matlab, Toolbox (nombre y versin).
Imaqhwinfo(adaptor) Donde adaptor es el nombre del adaptador
instalado, por lo general winvideo. Este comando devuelve
informacin relacionada al adaptador. Imaqhwinfo(adaptor,DeviceID)
Donde DeviceID es el ID del dispositivo a utilizar obtenido con el
comando anterior. Si slo se cuenta con un dispositivo conectado el
DeviceID ser 1. Este comando muestra informacin del dispositivo
conectado (cmara) .
En matlab se puede verificar si la cmara web est disponible o
lista. Matlab puede acceder a diferentes tipos de adaptadores de
dispositivos de video. Un adaptador utiliza a matlab como un
dispositivo para adquisicin de imgenesA continuacin se muestran los
siguientes comandos:>> imaghwinfo;>> cam=
imaqhwinfo;>> cam.installedAdaptors;>> dev_info=
imaqhwinfo (winvideo, 1);
3.15.Captura de la imagen en matlab
Las imgenes capturadas utilizando la herramienta vfm son
entregadas al espacio de trabajo en formato RGB. Para capturar las
imgenes entregadas por los drivers en el espacio de trabajo de
matlab se utiliza la funcin vfm que tiene el siguiente formato
ImageCaptured=vfm(grab,n); Donde ImageCaptured es la variable que
contiene la imagen RGB, y n es el numero de frames a capturar, en
dado caso de que sea mas de uno la variable de la imagen capturada
se indexa para recuperar el frame necesario. De tal forma que si se
quisiera capturar el frame actual visto por la cmara se procedera a
escribir en lnea de comandos:
> >ImageRGB=vfm(grab,1);
> >imshow(ImageRGB);
3.16. Preparacion del dispositivo
Crear la estructura: cam=imaqhwinfo(adaptor,DeviceID)
Para poder obtener las caractersticas del dispositivo con
facilidad. Por ejemplo, para obtener los formatos soportados:
cam.SupportedFormats
Ejecutar el comando:
video=videoinput(adaptor,DeviceID,Format)
Construye un objeto de entrada de video (nexo entre el
dispositivo y Matlab). Si no se especifica Format se asume el
formato por defecto.
Pre-Visualizacin.Para desplegar la pre-visualizacin de las
imgenes a capturar ejecutar el comando: preview(video).>>
Preview (video)Captura.Para capturar una imagen ejecutar:
Image=getsnapshot(cam)
4. METODOLOGIA.
El presente proyecto de desarrollo en la ciudad de Hermosillo,
en distinto lugares, se tuvieron muchos inconvenientes en este
sentido ya que no se contaba con una rea de trabajo totalmente
adecuada para trabajar, fue necesario trabajar en distintos
lugares, en aulas de clases, laboratorios y en nuestras casas.Este
trabajo fue realizado bajo diseo experimental ya que dentro de este
se tuvieron que manejar bastantes variables, que fueron necesarias
para poder lograr el objetivo del sistema en conjunto con su cmara
como los que fueron la longitud de pixeles, el rea, igual en
pixeles el control de giro de los motoreductores, entre otras
cosas.Para la elaboracin de todo el proyecto podemos dividi su
metodologa en 3 partes: Diseo Electronico Programacion (MatLAb y
Pics) Armado del prototipoDiseo ElectronicoEn el diseo electrnico,
incluimos la comunicacin bluetooth, comunicacin por radio
frecuencia, control, y una etapa de potencia, a continuacin se
entrara en detalle en cada una de estas etapas.Comunicaciones
inalmbricasUn problema critico que se tuvo para el diseo del
carrito para que fuera inalmbrico, fue la transmicion de imgenes
del prototitpo hacia una computadora de manera inalmbrica. Se
consideraron posibles alternativas, se evaluaron su factibilida y/o
compatibilidad con Matlab y se decidio por instalar un kit
inalmbrico de transmicion de imgenes por radio frecuencia, debido
al bajo costo y a la falta de tiempo para investigar otros
protocolos de comunicacin. Los componentes que conforman el kit son
los siguientes: Video Camara Receptor de video con antena Adaptador
RCA a USB Cable AV(RCA)La cmara consta de 3 cables, dos de ellos
son para transmitir audio y video los cuales en nuestro caso se
quedaron desconectados, ya que la transmicion se realiza por medio
de una antena ya integrada a la cmara. Un tercer cable es para
alimentar a la cmara con una batera de 9 volts. A continuacin se
muestra una imagen de la cmara:
La seal transmitida desde de la cmara por medio de la antena
integrada a la camapara es capturada por un receptor el cual posee
salidas RCA de video para ser vistas en alguna pantalla, DVD etc. A
continuaciokn se muestra una imagen de este equipo:
Para poder trabajar con las imgenes para su posterior
procesamiento, la salida de video del reciber se conecto a un
adapatador USB que convierte la seal de video RCA a USB (digital).
Con este ultimo paso tenemos comunicacin inalmbrica entre la cmara
y una computadora, listo para procesar imgenes en MatLab tomadas
desde el prototipo y transmitidas inalambricamente. A continuacin
se muestra una imagen de dicho adaptador.
Otro aspecto muy importante es la comunicacin inalmbrica para el
control del prototipo (carrito). Una vez que se han procesado las
imgenes se genera un resultado de dicho proceso y esta informacin
se enviara inalmbricamente al dispositivo. Analizando los toolbox
de Matlab el dispositivo mas factible es la comunicacin bluetooth,
ya que Matlab cuenta con el toolbox Instrument Control Toolbox, en
el apartado de programacin se entrara en detalle.
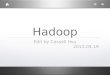
El modulo Bluetooth cuenta con salidas y entradas seriales en
niveles TTL, con esto nos permitio recibir datos desde una
computadora y comunicarlo con un microcontrolador mediante el
protocolo de comunicacin serial RS-232. De esta manera contamos con
la comunicacin inalmbrica desde la computadora hacia el prototipo
para enviarle la informacin necesaria para el control de los
motores. A continuacin se muestra una imagen del modulo bluetooth y
su diagrama de conexionamiento.
En la imagen anterior se puede observar la conexin que se
realizo entre el modulo bluetooth y el microcontrolador para la
transmicion de datos seriales. En el apartado de etapa de potencia
se ablara sobre el LM293 y su funcionamiento, y en el apartado de
programacin de microcontroladores se ablara sobre el por que se
conectaron de esta manera.
ControlEl microcontrolador realiza el control de los motores,
utilizando los pines RB0, RB1, RB2, RB3, utilizando RB0 y RB1 para
controlar el sentido de giro de un motor, sacando por estos pines
conbinaciones (0 0, 0 1, 1 0, 1 1) y de igual manera para el
segundo motor utilizando los pines RB2 y RB3. De esta manera se
logro controlar los dos motores. En el apartado de la etapa de
potencia se explica a detalle las conexiones del LM293.
Etapa de potenciaPara suministrar un voltaje de 5 volts a los
motores de corriente directa, se utilizo el driver LM293, este
driver cuenta con dos canales repartidos en 2 entradas y 2 salidas
por canal, adems de los enables que se alimentan directamente a 5
volts para activar los canales. Los pines RB0 y RB1 se conectaron
al canal 1, de tal manera que cuando el RB0=0 y RB1 el motor gira
en un sentido al cambiar los valores a RB0=1 y RB=0 el motor cambia
de giro. Se realiza exatamente lo mismo para el segundo motor. La
alimentacin de todo el circuito se realizo con dos bateras de 3.6V
a 700mA conectadas en seria para aumentar el torque y pasando por
una etapa de regulacin de voltaje con un 7805 para mantener un
voltaje de 5volts estable. De esta manera tenemos la potencia
suficiente para poder hacer girar los motores con el suficiente
torque.Programacion (MatLab y PICS)MatLab
Una vez teniendo el circuito electrnico bien definido con todos
las comunicacione bien definidas se procedio a la programacin de
los componentes necesarios. El programa principal, el del control
del prototipo y el procesado de las imgenes se realizo en Matlab.
Se utilizo una interface grafica para la programacin, a continuacin
se muestra una imagen de dicha interface grafica.
El programa consta de 3 botones principales, Encender Camara,
Iniciar Procesamiento y Apagar Camara, como su nombre lo indica
estos botones realizan las funciones de encender la cmara, iniciar
el procesamiento de imgenes y apagar la cmara. Cuenta con dos reas
de graficacion una para mostrar las imgenes a color (formato
RGB24_320*240), y otra rea mas pequea donde se grafica la imagen
pero binarizada por un umbral, este umbral se controla por medio de
un slider que se encuentra arriba del rea de graficacion. Cuenta
con un edit text para indicar los movimientos que deben de tener
los motores, adems de 3 edit text para indicar las coordenadas del
centroide de la figura y para mostrar el rea del objeto. Por ultimo
cuenta con un ultimo edit text para indicar el estado del carrito,
si esta buscando el objetivo o si ya lo detecto. Adems cuenta con
un control manual, para posicionar el carrito de manera manual en
la posicin deseada incial, para despus iniciar el procesamiento y
desactivando el control manual y activando el control automatico.Lo
anterior descrito es una descripcin breve de la interface grafica,
ahora pasaremos a la forma de programacin y el funcionamiento del
programa.
Cuando se corre el programa lo primero que aparece es la
interface grafica, como se mostro en la imagen anterior, al mismo
tiempo tambin habilita la comunicacin con el bluetooh utilizando el
bluetooth de la computadora, con la instruccin
blue=Bluetooth(nombre_dispositivo,1) donde el 1 representa el canal
de comunicacin, y con la instrucion fopen(nombre_dispositivo) para
abrir la comunicacin.
Cuando se presiona el botn iniciar procesamiento lo primero que
realiza lo que realiza el programa es entrar en un siglo infinito y
tomar una foto y mostrarla en un axes principal, despus la procesa
hasta obtener una imagen binarizada con un umbral regulado por el
usurario mediante un slider, despus se la da un procesamiento para
eliminar pixeles exedentes o ruido, primero dilatando la imagen
(agregacin de pixeles en la frontera) y despus erosionndola
(eliminacin de pixeles en la frontera), una vez lista la imagen se
realiza un barrido de la imagen recorriendo cada pixel de la imagen
por columnas y filas, y checando en el barrido cuales pixeles estn
en blanco, cuando encuentra un pixel en blanco pasa a una serie de
instrucciones para determinar si es una esquina especifica de un
cuadrado. Por ejemplo para detectar la esquina superior izquierda,
en ese pixel que se encuentra verefica que el pixel de arriba este
en negro, el de la derecha en blanco, el de abajo en blando y el de
la izquierda en negro, de esta manera se garantiza que ese pixel es
la esquina superior esquierda y el mismo procedimiento se realiza
para las cuatro esquinas. Cuando detecta que una esquina esta
presente, pone en uno una variable para indicar que se detecto la
esquina, al final de aver pasado por el chequeo de las 4 esquinas,
revisa las variables, y si las 4 valen 1, quiere desir que se
detectaron 4 esquinas, entonces enva a un edit que se detecto el
objetivo, si alguna de las variables no vale uno, aparece en ese
mismo edit buscando objetivo y no realiza ninguna accin. En el caso
que detecte satisfactoriamente las cuatro esquinas del objetivo
pasa a una serie de funciones, primeramente para calcular el
centroide del objetivo, graficarlo y calcular el rea del objetivo y
mostralo en los edit text. Como nada mas importa el control del
carrito hacia a la derecha y hacia la izquierda se tomo la
coordenada del centroide en y, y entra a una serie de condiciones
donde se evaluava el valor de la coordenada y si era menor o igual
a 120(pixeles) pasa a escribir un dato por el bluetooth para hacer
girar el carrito hacia la izquierda, de no cumplir esta condicin
pasa a otra condicin, si la coordenada es mayor o igual a 200 pasa
a escribir en el bluetooth un dato para hacer girar los motores
hacia la derecha, de no cumplir esta condicin, pasa a revisar si
esta dentro del rango 120-200 de ser haci quiere desir que el
centroide esta en el centro de la imagen, y pasa a revisar el tamao
de la imagen si el rea de la imagen esta por arriba de un set
point, quiere desir que ya esta suficientemente cerca, por lo que
escribe un sero en puerto bluetooth para apagar los motores, si es
menor que el valor del set point escribe en el bluetooth un dato
para indicar que avanze el carrito, por lo tanto escribe un dato en
el bluetooth para hacer que avanze el carrito, dependiento de cual
condicin alla sido verdadera pasa a escribir en un edit text el
sentido de giro de los motores. Despus de todo esto se inicializan
las variables en 0, que se usaron para indicar que se detecto una
esquina. Habiendo echo esto termina una corrida completa del ciclo
infinito y comienza otra vez desde el inicio. Los datos que se
mandaron desde matlab por el bluetooth hacia el microcontrolador
van en una secuenca determinada para que lo nico que realice el
microcontrolador es pasar el dato al puerto B. a continuacin se
muestra el programa completo.
function varargout = Prueba_3(varargin)% PRUEBA_3 MATLAB code
for Prueba_3.fig% PRUEBA_3, by itself, creates a new PRUEBA_3 or
raises the existing% singleton*.%% H = PRUEBA_3 returns the handle
to a new PRUEBA_3 or the handle to% the existing singleton*.%%
PRUEBA_3('CALLBACK',hObject,eventData,handles,...) calls the local%
function named CALLBACK in PRUEBA_3.M with the given input
arguments.%% PRUEBA_3('Property','Value',...) creates a new
PRUEBA_3 or raises the% existing singleton*. Starting from the
left, property value pairs are% applied to the GUI before
Prueba_3_OpeningFcn gets called. An% unrecognized property name or
invalid value makes property application% stop. All inputs are
passed to Prueba_3_OpeningFcn via varargin.%% *See GUI Options on
GUIDE's Tools menu. Choose "GUI allows only one% instance to run
(singleton)".%% See also: GUIDE, GUIDATA, GUIHANDLES % Edit the
above text to modify the response to help Prueba_3 % Last Modified
by GUIDE v2.5 10-Jun-2012 17:29:06 % Begin initialization code - DO
NOT EDITgui_Singleton = 1;gui_State = struct('gui_Name', mfilename,
... 'gui_Singleton', gui_Singleton, ... 'gui_OpeningFcn',
@Prueba_3_OpeningFcn, ... 'gui_OutputFcn', @Prueba_3_OutputFcn, ...
'gui_LayoutFcn', [] , ... 'gui_Callback', []);if nargin &&
ischar(varargin{1}) gui_State.gui_Callback =
str2func(varargin{1});end if nargout [varargout{1:nargout}] =
gui_mainfcn(gui_State, varargin{:});else gui_mainfcn(gui_State,
varargin{:});end% End initialization code - DO NOT EDIT % ---
Executes just before Prueba_3 is made visible.function
Prueba_3_OpeningFcn(hObject, eventdata, handles, varargin)% This
function has no output args, see OutputFcn.% hObject handle to
figure% eventdata reserved - to be defined in a future version of
MATLAB% handles structure with handles and user data (see GUIDATA)%
varargin command line arguments to Prueba_3 (see VARARGIN) % Choose
default command line output for Prueba_3handles.output = hObject; %
Update handles structureguidata(hObject, handles); % UIWAIT makes
Prueba_3 wait for user response (see UIRESUME)%
uiwait(handles.figure1);fondo1=imread('vision_1.jpg'); %carga una
imagen de fondoimshow(fondo1,'parent',handles.axes1); % y la
direcciona a un axes fondo2=imread('vision_2.jpg'); %carga una
segunda imagen de fondoimshow(fondo2,'parent',handles.axes2); % y
la direcciona a otra axes %bt=Bluetooth('Mario-Bluetooth',1); %
crea el objeto de bluetooth%fopen(bt); % y abre la
comunicacion%handles.bt=bt; guidata(hObject, handles); % ---
Outputs from this function are returned to the command
line.function varargout = Prueba_3_OutputFcn(hObject, eventdata,
handles) % varargout cell array for returning output args (see
VARARGOUT);% hObject handle to figure% eventdata reserved - to be
defined in a future version of MATLAB% handles structure with
handles and user data (see GUIDATA) % Get default command line
output from handles structurevarargout{1} = handles.output; % ---
Executes on button press in encender_camara.function
encender_camara_Callback(hObject, eventdata, handles)% hObject
handle to encender_camara (see GCBO)% eventdata reserved - to be
defined in a future version of MATLAB% handles structure with
handles and user data (see GUIDATA)
vid=videoinput('winvideo',1,'YUY2_320x240'); % configuracion de la
web-camhandles.vid=vid; % redireccionamiento de la variable
triggerconfig(vid,'manual'); % activacion de la camara
manualmenteset(vid,'FramesPerTrigger',1); % solo tomara una
fotoset(vid,'TriggerRepeat',Inf);
set(vid,'ReturnedColorSpace','rgb'); % la imagen estara en formato
rgbstart(vid); %inicializa la camara
set(gcf,'DoubleBuffer','on','renderer','painters');guidata(hObject,
handles); % --- Executes on button press in pushbutton2.function
pushbutton2_Callback(hObject, eventdata, handles)% hObject handle
to pushbutton2 (see GCBO)% eventdata reserved - to be defined in a
future version of MATLAB% handles structure with handles and user
data (see GUIDATA) while 1 trigger(handles.vid); %prepara la camara
im_rgb=getdata(handles.vid); %toma una fotogradia
imagesc(im_rgb,'parent',handles.axes1); % y la manda a un axes
im_gray=rgb2gray(im_rgb); %convierte la imagen de color a escalas
de grises val_umbral=get(handles.slider1,'value'); % toma el valor
de umbralamiento im_bin=im_gray=120 && (cy/t)