Embed Size (px)
Citation preview


İçerik :1- Endüstriyel Robot nedir. ?
2- Endüstriyel robotların avantajları nelerdir. ?
3- Endüstriyel robotların dezavantajları nelerdir. ?
4- Endüstriyel Robotların Sınıflandırması
4.1 Robot eksenlerine göre sınıflandırma.
4.1.1 Robot hareketinin eksenleri.
4.1.2 Çalışma Alanı
4.1.3 Koordinat Sistemlerine Göre Robotların Sınıflandırılması
5- Kaynaklar.
1. Kartezyen Koordinat2. Silindirik Koordinat3. Küresel Koordinat4. Döner Koordinat
4.2 Robot tiplerine göre sınıflandırma1. Kartezyen Robotlar2. Mafsallı Robotlar3. Scara Robotlar

Endüstriyel robot, genel amaçlı, insana benzer özelliklere sahip programlanabilir bir makinadır.
Başka bir tanımı ise ;
Endüstriyel bir robot, çeşitli işleri yerine getirmek üzere, malzeme, parça ve özel aletleri değişken programlanabilir hareketlerle taşımak üzere tasarlanmış,yeniden programlanabilir, çok fonksiyonlu bir aygıttır.
Otomotiv Elektrik
Elektronik Mekanik

Daha esnek bir üretim sistemi sağlamak Daha tutarlı bir kalite kontrol sağlamak Çıktı miktarını artırmak İnsana göre daha fazla yük kaldırma kabiliyeti İnsana göre daha çabuk sonuca ulaşma kabiliyeti Usandırıcı ve tekrarlayıcı işlerde yeterlilik Tehlikeli ortamlarda çalışabilme kabiliyeti İnsan hatalarını elimine etme Kalite kontrol hatalarını minimuma indirme Kendini hızla amorti etme Yüksek hareket esnekliği Yüksek kar eldesi

x Düşünemezx Vision System, ile yalnızca kendisine öğretilen cisimleri görebilir x Programlanmadan çalışmazx Kendisine öğretilenleri yapabildiğinden hareketleri kısıtlıdırx Yüksek yatırım maliyetix Boşa geçen bakım ve onarım zamanları

4.1. Robot Eksenlerine Göre Sınıflandırma
Bir robot hareketinin kapasitesi, kontrol edilebilmesi mümkün olan eksenlerdeki
hareketlerle belirlenir.
4.1.1. Robot Hareketinin Eksenleri
Manipülatörün kendi ekseni veya serbestlik derecesi diye tanımlanan değişik hareketleri vardır. Eğer bir manipülatör kendi ekseni etrafında dönüyorsa, bu robota “tek eksenli robot” denir. Eğer manipülatör yukarı ve aşağı doğru hareket ediyorsa, bu robota“çift eksenli robot” denir Kendi ekseni etrafında dönen ve yukarı aşağı hareket edenmanipülatör, yatay eksende ileri–geri hareketde edebilir.Bu robota “üç eksenli robot denir. Endüstriyel robotlar en az üç eksene sahiptirler.

4.1.2. Çalışma Alanı
Robot kolunun yetişebileceği toplam alana, çalışma alanı denir.
Şekil’de mafsallı bir robotun çalışma alanı ile bir insan kolunun çalışma alanı arasındaki benzerlik görülmektedir.

4.1.3. Koordinat Sistemlerine Göre Robotların Sınıflandırılması
Kartezyen koordinat sistemi, Silindirik koordinat sistemi, Küresel koordinat sistemi, Döner koordinat sistemi.
Koordinat sistemlerine göre robotlar dört kısımda incelenir:

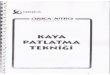
4.1.3.1. Kartezyen Koordinat Sistemi
Bu sistemde bütün robot hareketleri; birbirlerine karşı dik açılı şekilde olur(Şekil 2). Bu konfigürasyon en kısıtlı hareket serbestine sahip robot tasarım şeklidir.Hareketli kısımlar X, Y ve Z kartezyen koordinat sistemi eksenlerine paralel hareket ederler. Robot, üç boyutlu dikdörtgen prizması hacmi içindeki noktalara kolunu hareket ettirebilir
Şekil2. Kartezyen koordinat sistemine ait şematik çizim
Şekil 3. Kartezyen Robot

4.1.3.2. Silindirik Koordinat Sistemi
Bu tip robotlar temel bir yatak etrafında dönebilir ve diğer uzuvları taşıyan ana gövdeyesahip özelliktedir. (Şekil 5) Hareket düşeyde ve ana gövde eksen kabul edildiğinderadyal olarak sağlanır. Dolayısıyla çalışma hacmi içerisinde robotun erişemeyeceği, ana gövdenin hacmi kadar bir bölge oluşur.
Şekil 5. Silindirik koordinat sistemi Şekil 6. Silindirik koordinat sistemli robotun çalışma alanı

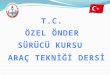
4.1.3.3 Küresel Koordinat Sistemi Matematiksel olarak küresel koordinat sisteminin iki tane dairesel ve bir de doğrusal ekseni olmak üzere üç tane ekseni vardır. (Şekil 7). Şekilden de anlaşıldığı gibi temelde iki hareketi mevcuttur. Bunlar yatay ve düşey dönmedir. Üçüncü bir hareket ise doğrusal (uzama kolunun ileri geri hareketi) harekettir.Doğrusal hareket aynen kartezyen koordinatlardan herhangi bir koordinatın hareketigibi davranış gösterir
Şekil 7. Küresel koordinat sistemi
Şekil 8. Küresel koordinat robotunun yatay ve düşey hareket alanları

4.1.3.4. Döner Koordinat Sistemi
Eğer bir robot herhangi bir iş yaparken kolu dairesel hareketli bağlamlarla oluşturuyorsa,bu tip robotlara Döner koordinat sistemli robotlar denir.
Robot kolunun bağlantıları gövde üzerine, etrafında dönecek şekilde monte edilmiştir ve dayanak noktaları birbirine benzeyen iki ayrı bölümü taşır.Dönen parçalar yatay ve dikey monte edilebilir. (Şekil 9).
Şekil 9. Döner koordinat sistemli robot eksenleri Şekil 10. Döner koordinat sistemli bir robot

Kartezyen robotlar, Mafsallı robotlar Scara robotlar.
4.2. Robot Tiplerine Göre Sınıflandırma
Robot Tiplerine Göre Sınıflandırma 3 grupta incelenir

Kartezyen koordinat sisteminde bütün robot hareketleri birbirine 90°’lik açıyla hareket eder. Bu nedenle kartezyen robotlar dikdörtgenimsi bir biçimdedir. Günlük hayatımızda sağa sola, aşağı yukarı vb. hareketlerimiz, kartezyen koordinat hareketlerdir
4.2.1. Kartezyen Robotlar
Çalışma alanları şekil1. de görüldüğü gibi robotun yapısından daha küçüktür. Eğilme ve bükülme işlemlerini gerçekleştiremez. Çalışma alanları kare veya dikdörtgen pirizma şeklindedir. Yük taşıma kapasitesi diğer robot türlerine göre daha büyüktür. İnsan gücünün taşıma kapasitesini aşan yüklerin taşınmasında kullanılır.

Kartezyen robotlar, basitlikleri ve konstrüksiyonları sayesinde yüksek ve hızlı bir yapıya sahiptir .

4.2.2. Mafsallı Robotlar
İnsan kolunun hareketlerini taklit etmeye en yakın robot kol dur. Üretim sistemlerinde diğer kolların hareket kabiliyetlerinin sınırlı olmasından dolayı mafsal sayısı genellikle 5 veya 6 adet olan robot kollara ihtiyaç duyulmuştur. Bu tip robot kollarda her mafsal ayrı ayrı kontrol edilebilen servo motorlardan oluşmaktadır.
Kol eklemli robotlar altı eksende de rahatçahareket ederler. Bu altı eksenden üç tanesi kol hareketi için, diğer üç tanesi ise bilekhareketi içindir. (Şekil 14)
Şekil 14. 6 Eksenli Mafsallı Robot Şekil 15. Mafsallı Robot

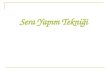
4.2.3. Scara Robotlar
Scara, yani seçilenlere uyan montaj robotu koludur . Scara tipi robot, çok yüksek hıza ve en iyi tekrarlama kabiliyetine sahip olan bir robot çeşididir
Şekil 16’de Scara tipi bir robota ait şematik çizim verilmiştir. Bu robotta üç genel özellik bulunmaktadır
Şekil 16. Scara tipi robota ait şematik çizim
Bu robot kol (şekil 4). dençalışma alanı görüldüğü gibi, kolun
altında bulunan parçaların taşınmasında kullanılır

1. Altınay Robotik ve Otomasyon A.Ş., “Dünya Robot Nüfusu-1997” Makina Magazin Dergisi., Sayı:23, Mart 1998, s. 89-94
2. De Silva, D.,“Reactions to Robots, Engineering”
3. Browne et al.1998 Browne, I.W.A., et al. 1998 MNRAS 293, 257 Interferometer
4. Peşkircioğlu, N., “Otomasyon ve Entegre Kalite Kontrolu”,Verimlilik Dergisi, Sayı 15, Mayıs, s. 19–40
5. Shımon Y.”Endustrial Robotics” 605 Thirt Avenue,New York,N.Y. 10158–0012, 1999
6. Sosyal Planlama Genel Müdürlüğü “Sanayide Robot Teknolojisi,Uygulaması Ve Önemi”Aralık 1991.
7. Nakamura,Y. “Advanced Robotics Redundancy and Optimization” Mitsubishi Industrial Robot,“StandartSpecifications Manual”(Mitsubishi Electrıc Corporation), Nagoya, Japan.
8. http://www.makinateknik.org/robotic
9.http://www.robbot.org/default.aspx?pid=4500

[email protected]@hotmail.com