Embed Size (px)
DESCRIPTION
rolstoelvaardigheid fysiotherapie amsterdam FLP
Citation preview

HET IlEGELEIDEN VAN BEWEGEN EN OEFENEN II
\.tck \ eocle vC \~tJ. ~lel ~ l/~ tOJ Cj 1J
l r .'tt£:- ~c~ (\,OC" I r.,~0 Rolstoel vaardigheid0
,. \ .~
\ b Ci qJi.
( ..,~\, ~"'. /~ UU': J.' ..) ..-', ·vV"·t,.·t:·v,o v..:'. L.-.i
.... c, .' I) L . ') (Ilif \- L£~d V-i; ,.1:",,}:--,( .
-, ~
~;:: ~:.,
~~" .
~~-
. ':,'
~L
Het afhankelijk zijn van een rolstoel heeft nogal wat maatschappelijke
consequenties, waarvan een beperking van de eigen 'mobiliteit' het meest in het
oog springt. Voor elke rolstoelgebruiker geldt dat zijn/haar mobiliteit in belangrijke
mate afhankelijk is van de vaardigheden en de graad van beheersing die hij/zij
heeft op gebied van rolstoel gebruik. Dit hoofdstuk bevat een aantal eerste
opmerkingen waarmee basale probJemen uit de praktijk gemakkeiljker tegemoet
kunnen worden getreden. Het in detail beschrijven van aile mogelijke technieken
zou te ver voeren; beschouw deze opmerkingen hooguit als aandachtspunten die
belangrijk zijn om in gedachten te houden. Voor degenen die meer willen weten is
het raadzaam P.Heemskerk over de didactiek van rolstoeltraining te raadplegen.
Alvorens met vaardigheidstraining op gebied van rolstoel gebruik kan worden
begonnen moet een \i'Gltdb~nde zitbalans - actief, dan wei via passieve ondersteuning
zijn verkregen. Vandaar dat hier eerst zal worden gekeken naar de voorwaarden die
moeten worden gesteld aan de rolstoel om een optimale zitbalans te kunnen verkrijgen,
Glaarna aan de zgn. elementaire rolstoel vaardigheden, en tenslotte aan de specifieke
vaardigheden. Het onderscheid in elementaire en specifieke vaardigheden wordt
gemaakt op basis van de (on)mogelijkheid om op de achterwielen te balanceren. Tot de
elementaire vaardigheden behoren aile rolstoel vaardigheden op vier wielen, zeals het
voor- en achterwaarts rijden, het lang of kort draaien, en het verwijderen van voet- of
armsteunen. Onder specifieke rolstoel vaardigheden worden aile technieken verstaan
waarbij het opzetten en balanceren op de achterwielen noodzakelijk is, zoals een steile
helling afrijden, stoep op- en afrijden, achterwaarts vallen vanuit de rolstoel of
achterwaarts opvangen. De elementaire vaardigheden zijn haalbaar bij laesies vanaf
(5-(6, de specifieke rolstoel vaardigheden vereisen goede grijpkracht en zijn in principe
haalbaar vanaf laesies ter hoogte van (8 .
4,1 Zithouding en handhavingvan d.e zitbaulns.
Zoals hierboven gezegd is een goede zitbalans voorwaarde om een voldoende
beheersing van ro/stoel vaardigheden te bereiken. Hier wordt met name gekeken naar
de kenmerken en afstellingen van de rolstoel zelf om - via 'passieve' ondersteuning -:die
m!s'toe!·a.aequaat aan te passen aan de eigenschappen van de revalidant
t!f$~~g1t11iI1'11i~;:I<r(inmerkenvatreen I rhoderne' rolstoel. Op gebied van rolstoelen is in de laatste 25 jaar het nodige veranderd. Vandaar dat ook
wordt gesteld dat goede rolstoeltraining aileen mogelijk is in een moderne rolstoel. De
'klassieke' rolstoel nodigt nauwelijks uit tot experimenteren of tot het aannemen van
een actieve houding ten opzichte van de omgeving. Een moderne rolstoel voor dagelijks
gebruik wordt gekenmerkt door een gering gewicht (minder dan 15 kg.), een ten -.::->·c;.\;.:
Pagina 58

)//{". f·· '.',
HET BEGELEIDEN VAN BEWEGEN EN OEFENEN II
,opzichte van elkaar verstelbare positie van wielen (en zitting, gemak~elijk
demohteerbare, schuin geplaatste wielen en een eigentijdsevormgeving. In vergelijklng
tot de klassieke stoel ligt bij een normale, ondersteunde zit het lichaamszwaartepunt, van de revalidant verder naar achteren, waardoor dedruk op de voorwielen en dus de
rolweerstand bij het rijden afneemt. Bovendien neemt hierdoor de kans dat de
revalidant met rolstoel en al voorover za\ slaan, af.
De schuine stand van de wielen zorgt voor
een grotere wendbaarheid, een
efficientere aandrijving vanuit schouders
en armen, een toegenomen zijwaartse
stabiliteit en de preventie van handletsels
bij het manoeuvreren door nauwere
openingen. Daar de plaats van de zitting
en wielen ten opzichte van elkaar zowel in
voor-achterwaartse als in verticale richting
verstelbaar is kan de optimale
wielaandrijving -In verhouding tot
lichaamsbouw en rijtechniek van de
revalidant worden uitgezocht. Oroclliiat' de, ideale zithouding voor het rijden en voor
t~a{lsfers uit de,stDel enigszins tegengestelde eisen stellen, zal in geval van een
tetraplegie meestal een, compromis gevonden moeten worden voor wat betreft de
ideale maten en instellingen van de stoel.
1~fti?ta;pen en jnste/lingen van de rolstoel. Veel tijd en aandacht moet worden besteed aan het individueel passen, proberen en
bijstellen, daar vrijwel de gehele dag van dezelfde rolstoel gebruik moet worden
gemaakt. Bij die persoonlijke instellingen wordt niet aileen rekening gehouden met de
lichaamsbouw van de revalidant maar ook met voorwaarden in verband met de hoogte
van de laesie, de zitbalans, preventie van decubitus, het patroon aan ADL-activiteiten en
de wijze van rolstoel rijden,
:!ye'zitbreedte mag niet of nauwelijks breder zijn dan de heupbreedte, waardoor de
wielen niet te ver uit elkaar staan en de aandrijving zo efficient mogelijk wordt.
:rz>ezitdiepte behoort getijk te zijn aan de bovenbeen lengte minus 5-6 cm (de>{; afstand tussen knieholte en zitting). Wanneer de zitdiepte te groot is zakt de
r- revalidant onderuit in de zgn. sacrumzit en on~staaterw(ijvin9ten oDzichte van de'\1' ~ ~--,..---..----..-~---.
I hu.idvandebill.en. Bij een te korte zitdiepte worden de bovenbenen onvoldoende !:?~~
ondersteund met als gevolg een zwaardere belasting van de billen. BbVetidienis er
0) ~X'rc\Q,~ . k..- hiendoor>Vaak: te wejl'li§Lfuimte om een vlotte zijwaartse transfer ~~el te
l. ~~".)I,".,,_U.r,jdV~C maken.zolld~ropdewielen te gaan zitten. ~;,l\,.; •.:.41i\.~J'\"" 'V·v '., t '~ ,~ D.eleogte van de onderbenen,is bepalend voor de zithoogte. In de regel wordt rie
zo laag mogelijk genomen, met dien verstande dat deveetsteunen voldoende hoog
(ca 7 cm) boven de ondergrond afgesteld kunnen worden zodat drernpels en
heilingen geen probleem vormen. Een adequate zithoogte is daarnaast ook
Pagina 59

HET BEGELEIDEN VAN BEWEGEN EN OEFENEN II
belangrijk om voldoende ondersteuning van de bovenbenen te garanderen,
waardoor de benen minder naar abductie neigen en de tuber ischii relatief ontlast
worden.
De 'hardheid' van de zitting zelf is vaak een compromis tussen de stabiliteit van een
harde, aangepaste zitting en het onstabiele van een goed antidecubitus kussen. Met
name wordt gezocht naar een goede drukverdeling onder de zitbeenknobbels,
terwijl de ondersteuning van de bovenbenen van harder materiaal kan worden
voorzien.
De zitho~ding en -balans zijn afhankelijk van de zgn. zjthoek. Dit is de hoek die de
zitting maakt ten opzichte van de horizontaal. Een 'positieve zithoek (zitting loopt
schuin af naar achteren) is een aanpassing die vaker tot in het extreme wardt
toegepast in de rolstoel sporten am de romp balans aanzienlijk te verbeteren. Het
nadeel ervan is opnieuw een toename van de belasting op beide zitbeenknobbels.
Om die reden wordt bij een redelijk gevaar voar decubitus (dwarslaesie patienten) de
zithoek steeds zo klein mogelijk warden gehouden. Ais een positieve zithoek wordt
gebruikt om de zitbalans te verbeteren, by. bij hoge tetraplegieen, dan wordt vaker
in gelijke mate de rugleuning schuin naar achter ingesteld zodat het steunvlak
relatief vergroot wordt en wrijving of puntbelasting minimaal blijven. Een te grote
positieve zithoek kan ook problemen geven bij het naar voren schuiven bij een
transfer uit de rolstoel, met name bij laesies ter hoogte van (5 en (6.
Een goede zithouding vereist een'9pede bekkenpositie. Een effectieve
ondersteuning in het lumbale gedeelte van de rug voarkomt dat het bekken
achterover kantelt en de patient onderuit gezakt zit. \(;QQr; een 'actieve' zithouding
in de rolstoel zal steeds de hoogte van de rugleuning zo laag mogelijk worden
gekbzen, mits de daadwerkelijk aanwezige zitbalans dat toelaat. Een actieve
zithouding geeft meer bewegingsvrijheid voar romp rotaties en armbewegingen.
Bij tetraplegische patienten mag de breedte van de rugleuning, in het bijzonder de
afstand tussen beide handvaten, nauwelijks grater zijn dan de afstand tussen
beide okselplooien zodat het rijden ongestoord kan plaatsvinden.
_ ., eunin· wordt voor de handbewogen rolstoel steeds lager gekozen dan de :')
'·.elhoogte. D varm en breedte van armleunmgen wordt soms aangepast, by. " -~bj' gieen ter ondersteuning van een niet actieve arm.
Grote wielen en aandrijfhoepels vergemakkelijken het rolstoel rijden (bv voor
tetraplegieen), net zoals smalle en harde voorwieltjes. De achterwielen worden zo
ver naar voren geplaatst dat het lichaamszwaartepunt relatief naar achteren ligt
en ongeveer 80% van het gewicht op de achteras rust. Hierdoor verhoogt de
wendbaarheid enorm. Nadeel is dat tevens de ruimte voor de wielen klein wordt
wat hinderlijk is voor een zijwaartse transfer
';ij),l;:;gfipop-de aandrijfhoepels"is te verbeteren door een rubberen verdikking. Zo'n
verdikking is zinvol voor die dwarslaesie patienten die een verminderde
handfunctie heboen. NOp'penhoepels zijn vooral ge'lndiceerd bij laesies ter hoogte
van (5-(6 omdat deze patienten vooral de biceps gebruiken om de rolstoel
voorwaarts te rijden ---
g' If
wi, )
Pagina 60
HET BEGELEIDEN VAN BEWEGEN EN OEFENEN II
.+2 ElfrnerZlaire rolstoe!·vttarmghedeJl.
Tot de elementaire vaardigheden behoren de volgende:
het monteren en demonteren van rolstoel(onder)delen;
het voorwaarts rijden en remmen;
het achterwaarts rijden en remmen;
het voor- en achterwaarts draaien;
.het draaien van grote bochten en het ter plekke draaien;
: het op- en afrijden van lichte en lange hellingen;
'het rijden door deuren en tussen objecten. \
1. Montage en demontage van rolstoel(onder)delen. Het kunnen demonteren en monteren van de rolstoel is haalbaar en zinvol als ook een
zelfstandige transfer in/uit de stoel haalbaar is, in principe dus bij laesies vanaf C5-C6 of
lager. Vanaf dat niveau kunnen de zijsteunen al worden uitgenomen en teruggeplaatst
door gebruik van de dorsaal extensoren van de hand; het afnemen en terugzetten van
remverlengers lukt normaliter dan ook (actieve handfunctie) evenals het opklappen van
voetsteunen of het wegdraaien van onderbeensteunen. Het afnemen en bevestigen van
de beensteunen of iets van de grond opnemen vereiste echter niet aileen een goede
handfunctie maar ook een gecontroleerde romp flexie in de rolstoel. Het monteren en
dern9l1te~en van zgn. "Quick release wheels", bij verplaatsing inJuit de auto, vereist
controle over 'de vinger- en duimflexoren en is slechts haalbaar bij laesies vanaf niveau
e8.
2. Het rijden met de rolstoel. Het rijden op een egale ondergrond is moge/ijk bij laesies vanaf niveau C5-C6. De
tetraplegische revalidant gebruikt in het begin van zijnJhaar training een
veiligheidsgordel die bij het verkrijgen van voldoende zitbalans niet meer nodig zal zijn.
Handschoenen beschermen de huid tegen vuil en wondjes; bovendien verhoogt
daardoor de grip op de wielen.
cH~tYQqCNaqrts rijdenop' effen terrein gebeurt vanuit een symmetrische
dllwbewe·ging. Bij verlies van controle over deti'l'Ceps kan de voorwaartse stuwing
worden bereikt via een inzet vanuit de pA~eps, de polsextensoren en de m. deltoideus en
m. pectoralis Daarbij is een goede grip van de handpalmen op de wielen (banden) wei
noodzakelijk. Bij verlies van controle over de m. pectoralis is het voorwaarts rijden
slechts deels haalbaar, maar draaien en achterwaarts rijden niet. In verband daarmee is
op deze en hogere laesiehoogtes (vanaf C5) zander meer een elektrische rolstoel
ge'fndiceerd voor langere afstanden,
Bij dergelijke hoge (cervikale) laesies wordt, by. in het draaien tijdens het rijden, vaak
gebruik gemaakt van de rem om de beweging bij te sturen. Het achterwaarts rijden of
de korte draai op de plaats gebeurt bij deze hoge laesies (C6) door retroflexie in de
schouder, het plaatsen van de handpalmen achter de as en het wiel achterwaarts te
draaien, via een elleboogextensie met actieve schouder anteflexie en scapula depressie.
Pagina 61
HET BEGELEIDEN VAN BEWEGEN EN OEFENEN II
Door een gelijksoortige beweging kan ook de rolstoel op de rem worden gezet.
Remverlengers vergemakkelijken deze manier. Het afzetten van de rem gebeurt door
inzet van de mm. extensores carpi radialis. Eventueel kan ook de rolstoelhandschoen
achter de rem worden gehaald om ze terug te trekken.
~tl~)ySiJAci+;n,ke rolstoel vaardioheden. .. ~ ...., 'f""-" 1~' b'
Specifieke vaardigheden omvatten die manoeuvres waarbij balanceren op de
achtervvielen vereist is. Het in balans komen en blljven vraagt zoveel handfunctie dat pas
vanaf een laesiehoogte C7-C8 deze manoeuvres haalbaar zijn. Achtereenvolgens
worden aangeleerd:
het in balans komen en blijven;
het rijden in balans;
het vanuit balans achterover vallen;
het nemen van drempels en stoepen;
het op- en afrijden van steilere hellingen;
het trap op- en afgaan met een persoon die helpt.
,~fL~~Nf) baJans komen en bJijven. Het balanceren op de achtervvielen vergt een goed gevoel voor evenwicht en het
nodige zelfvertrouwen van de revalidant. Daarom wordt het tot in balans komen en het
balanceren aangeleerd met de rolstoel gezekerd, by. aan de touwen van de turnrin<gen.
Deze worden aan beide handvaten gebonden met een dusdanige lengte dat vrij
balanceren mogelijk is maar bij achterover vallen de rolstoel in de touwen hangt.
Wanneer de balans achtervvaarts werd verloren dan kan simpel door het naar achteren
rijden, de rolstoel vanzelf weer in balans worden gebracht. Dergelijke beveiligingen
stimuleren het zelfvertrouwen om te oefenen; daarnaast is het hierdoor mogelijk om
met meerdere patienten tegelijkertijd te oefenen. Op die manier kan ook al snel na de
rolstoel mobilisatie gestart worden met het leren balanceren.
Het vanuit stilstand in balans op de achtervvielen komen gebeurt met een symmetrische
duw-trekbeweging van beide armen waardoor het zwaartepunt net boven de achteras
komt te liggen. Duidelijk zal zijn dat al naar gelang het lichaamszwaartepunt al dicht bij
de achteras rust, het in balans komen ook minder krachtsinspanning vergt. Bij de
huidige generatie rolstoelen is die positie van zitting t.o.v. de. wielen instelbaar en vraagt
het in balans komen zo weinig kracht dat zelfs iemand met een C6-0 dwarslaesie kan
leren balanceren.
\j
Hoe lager het zwaartepunt ligt, hoe eenvoudiger het is om de rolstoel in balans
te houden. De handen worden nabij de bovenkant van de hoepels of banden
vastgehouden zodat de stoel snel vlot en in twee richtingen kan worden gecorrigeerd
Dr,eigeMe balansverstoring by. naar achteren wordt pfimair gecorrigeerd via
zwaartepunt verplaatsing (romp licht naar voren), pas daarlia door wielcorrectie (naar
achteren, hetgeen voar velen 'onnat~urlijk' aanvoelt).
l) l\.t~\\'" VO\() <1V"'1? \2) ,",-_Q C:C"vV/"J t--'\. ":::·~1.J~0il....."./',,f
~?<L.
Pagina 62

--
HET BEGELEIDEN VAN BEWEGEN EN OEFENEN II
i~~eJt,:¥jIden in balans.
Wanneer het balaneeren op de plaats lukt kan worden gestart met het voor- en
aehterwaarts riJden op de aehterwielen. Om ongelukken te voorkomen blijft de
therapeut nog aehter de rolstoel. Daarnaast kunnen anti-kantelsteunen onder de
rolstoel worden gemonteerd en zodanig afgesteld dat ze net voorbij het punt van
evenwieht de grand raken. Het gebruik van anti-kantelsteunen is beperkt tot het rijden
op effen terrein.
Naast het rijden in balans wordt ook het draaien in balans geoefend. Het in
balans komen al (voorwaarts) rijdend vraagt een andere teehniek dan vanuit stilstand
tot bal~ms komen; al rijdend moet een plotselinge voorwaartse versnelling worden
gemaakt waarbij tegelijkertijd door nek- en romp extensie het zvvaartepunt naar
achteren wordt gebraeht. De sterkte van deze versnelling bepaalt in hoeverre de
voorwieltjes van de grand komen. Beheersing van deze teehniek is belangrijk om, al
voorwaarts rijdend, drempels en stoepen op en af te rijden.
f$,1M,flli!Ji!itfuafans achterover val/en, opvangen en terug komen. Hoe hoger het zvvaartepunt boven de aehteras ligt, hoe harder men aehterover valt. Bij
het aehterwaarts vallen zonder opvangen op de armen is het belangrijk tijdig het hoofd
naar voren te buigen en de hoepels vast te houden, zodat het liehaam een
aehterwaartse koprol maakt Het sueees waarmee dat wordt gedaan is o.a. afhankelijk
van de mate waarin de rompspieren kunnen worden ingezet. De aehterwaartse val
wordt gebroken doordat de rolstoelhandvaten als eerste de vloer raken. Het is
raadzaam am - wanneer dat mogelijk is - aan te leren de val op te vangen met een of
beTde armen. Ais met beide armen gespreid de val wordt afgeremd, valt de revalidant
bijna altijd uit de rolstoel doordat de stoel voorwaarts rijdt. Bij moderne rolstoelen met
een laagzvvaartepunt kan de val met een arm worden opgevangen terwijl met de
andere de hoepel kraehtig wordt vastgehouden zodat de rolstoel er niet onderuit rolt.
Daar is wei een behoorlijke grijpkraeht voor nodig (C8-Thl). Om terug in balans te
komen moet de revalidant de hoepel zo ver mogelijk naar voren grijpen en vervolgens, l.k:tv.
t~rvvijl hijfzij zieh kraehtig op de steunarm afduvvt, een torse ruk aan het wiel naar
aehteren worden gegeven. Beide armbewegingen dienen nauwkeurig te worden
getimed. Pas·als hetaehterwaarts opvar;tgen wordt beheerst kan zonder;'b~geh?iding
worden geoefend met het in balans op- en atrijden van stoepen en hellingen'.
i.I1~'ilt$~ht4~7ii.¥.t;ldeii van stoepen. Door gebruik van stevige matten (ge1eidelijl< steeds rneer) kan de training progressief
worden opgebouwd. Voorwaarts stoep oprijden kan door ofwel vanuit stilstand ofwel /~--~~~\ rijdend eerst in balans te komen. Bij lage stoepjes is het opwippen met de voorwieltjes
vaak al voldoende. Op het moment dat de voorwielen boven de stoep hangen wordt de
~) romp naar voren gebraeht zodat de rolstoel terugkantelt. Gedurende dat laatste c; Hu.. ~ \ ~. terugkantel moment kunnen de (grate) aehterwielen de stoep op getrokken worden. Bij
~i i1'../ ('/'1",'v- .;1) :r, het voorwaarts -in balans- afrijden van een stoep, moet de dreigende versnelling
worden afgeremd waardoor de revalidant niet aehterover maar eerder zaeht voorover ~ ~tc'-"- jIAWI valt en weer op vier wielen tereeht komt. I" /II ,
' \ ,//", ~// ....... .,~'....,.
Pagina 63

1
HET BEGELEIDEN VAN BEWEGEN EN OEFENEN II
" Het achterwaarts oprijden van stoePJes kan als ze nog laag zijn zander in
," balans te komen; bij hogere stoepen gaat men eerst ruggelings in balans tot tegen de
stoeprand, dan wordt het lichaam iets naar achteren gekanteld en op dat moment
worden snel de beide wielen de stoep op getrokken. Tenslotte wordt in balans zo ver
naar achteren gereden dat ook de voorwielen zich boven de stoep bevinden. Deze
vaardigheid vraagt meer handcontrole dan het voorwaarts oprijden.
;~f!Jt'&lfr!~t~inf;Jala:ns afrijden van een steile helling. /" Met een goede handfunctie is het mogelijk om in balans een steile helling af te rijden.
Wei vergt dit voldoende grip (vinger flexoren) om de rolstoel op ieder moment af te
kunnen remmen. Pas daarbij op voor het ontstaan van brandwonden (door wrijving) en
op het voolWaarts uit de stoel vallen van de revalidant doordat het lichaam
onvoldoende achterover helt, de beweging niet wordt vertraagd en de rolstoel
voortijdig op de voorwielen klapt.
;~.{~fj;';·l?tr afgaan van trappen. Om zelfstandig voolWaarts trappen in balans te kunnen afrijden moet de trap voorzien
zijn van brede, niet te hoge treden waardoor de achteras en het zwaartepunt zich
boven de trede waarop gesteund wordt, kunnen blijven bevinden. Aileen geroutineerde
revalidanten met een relatief lage laesie (paraplegie) kunnen dit zonder trapleuning aan
Een trap in balans op- en afrijden kan het beste 11leit'~M.a(l twee personen, waarbij
deeme de handvaten vastpakt en de andere "~;·goede methode is
ac;hterwaarts op enV:~G>rwcla/rtsaf. @e revalidant'~Sfar1:sein en helpt zelf mee
via de hoepels of trapleuning.
Ais de revalidant voldoende controle ove~e rolstoel heeft kan hiVzij ook met
een hulp trappen nemen. Het trap opgaan gebeurt (jan weer achtelWaarts, met de hulp
ook achtpr de rolstoel; trap afgaan gebeurt oOlWaarts op dezelfde manier
Tenslotte, aile manoeuvres waarbij
hulp van een ander nodig is kunnen ook hJt beste worden getraind in bijzijn van
partner of het familielid dat daarvoor beschikh';=Jar is.
Pagina 64

11\ ,'\\,1" Il\\l'l Ill,11 I
() (. It I , ~ \ l) r H t- 1{ r\ I' It-
II .1 ~ I ".\ 6 r. I I III
111 ~. 1 \ 9 0.) (,
3 Fysiologische en mechanische belasting van rolstoelrijden
H,E.]. Veeger en L.H.V, van der Woude
Rolstoelaal1drijuing is een (ysiologisch en mechal1isch belastel1de actiuiteit. De (ysiologi
sche e((iciel1tie uan rolstoelrijden is maximaal 10%, terwijl de {Jreualentie uan ouerhelas
tingsklachten aan scho~tder en pols bijzollder hoog is (30%-50% bij rolstoelgebruikers
met een dwarslaesie). De oorzaken uoor de hoge belasting zijn gerelateerd aan de Ilood
zaak tot stabilisatie van de schouder en de wijze waarop de aandrij(krachten kunnen wor
den uitgeoe(end als gevolg vall het ontwerp en de ins telling van de hoepelrolstoel. Voor het
verk rijgen va 11 inzich t ill de oorza ke n ua n de bela sting is bio mecha I1lsche bes tudel'ing ua II
rolstoelrijde;l noodzakelijk.
De aandrij(krachten blijken niet e((ectie( te wordell gericht: er Is sprake van een grote niet
tangentiele component. Deze krachtrichting lijkt echtel' de meest e((iciente krachtrichti/lg
te zijn, gegeven de a(stemming van stoel op gebruiker. De gebruikel's blijken bovendien eell
remmend moment op het oppervlak vall de hoepel uit te oe(enell. Dit moment wordt uer
oorzaakt door het (eit dat de handen tijdens de duwbeweging uan I'adiaalabductie in
ulnai1'abductie wOl'den gedwongell en dus een moment tegengesteld aan die beweging op
de hoepelbuis uitoe(enen.
Biomechal1lsche mode//ering hee(t duidelijk gemaakt dat de compressiekracht in het Gle
noHumerale (GH) gewricht zeer hoog kall wOl'den (tot 2000 N). Dit wOl'dt veroorzaakt
dool' de noodzaak tot actieve stabilisatie van het GH-gewl'icht door met name de rotator
cu((spieren. De hoge compressiekracht en hoge stabilisel'ellde spierkrachten zijn indicato
I'ell voor de illvloed van actieve stabilisatie op de mechanische en (ysiologische belasting.
Toekomstige uitgebreidere mode//ering zal de illvloed van stabilisatie op belasting bij in
complete spierskeletsystemen kunnen kwanti(iceren. Verondersteld wordt dat deze buiten
proportionee/ hoog zal zijn. [n de nabije toekomst behoort ook het uool'spe//en van de
meest optimale rolstoelcon(iguratie tot de mogelijkheden.
Roisroelrijden is in fysiek opzichr een belasrel1de acrivireir. uirgeoefend als gevolg van her olHwerp en de insrelling \',In Dr H L.\, Veeger De rolsroelgebruiker wordr rijdens de period en dar hij of de hoepelrolsroel. De aandriifkrachren hlijken nier effecrief 11l/f'l'I::/,lIr,/,u·t·l tf.I.tIlI:dlll.'tllllltf
zij lich in de rolsroel verplaarsr wwel fvsiologisch als me re worden geriehr Er is sprake van een grore nier-rangen1',"11 hnll/.IIlIt·IIft'!!' ('II f\/IIII"I'{I\'
/;O( C.l:.III ....'~·l('d{'lt:>d·.llll1('ll. '.11 HI/nl (hanisch ZWJar belasr. Enerzijds is de fysiologische effi riele eomponenr, Deze krachrrichring lijkr cehrer de meesr ,f('J Ikl('('.l.:/Ii.l.:fll't·Il'II"'/>,I{'!J('JI ,·.!!Ilit' cicnrie van rolswelrijden biiwnder laag: bij rolsroelrrai efficienre krachrriehring re "iill, gegcven cle afsremming \'"/,1'''11'1"1'''(1'11.\111.'",,..1./ 111
ning worden waarden \',In maxima,ll 10°1., gemeren (I l, van ,roel op gebruikcr 141.Dr I..~I.V, ,'all dec \\.'oude
( "II·",.·",/lI"/·,,.·III.I.,.,f,r'IIII$(/IIIIf{ Anderzijds i, de pre\'alenrie VJn overhelasringsklJehren Yoor een goed iIl7.ichr in de oOI'7Jken van de helasring die I"'" Il/iI,/.IIIII·II!,·!(·,·!! idllll." I" :1<ln schouder en pols hiizonder hoog: .10'X, ror 50'1" V,ll1 de gerel,neerd 7.iin aan de wijze W,1<lI'Op kr'lehrCll \vol·den uirlid! '·l:."/I:"If·'·'(·II~.I>""II('''.",11 "Ill'll I'Olsroelgehl'uikers Iller etl1 dwar,IJesic hecfr klachren J:ln gcocfend, is hiomc(h,lnischc hcsrudcring van rolS[oelrijden ,{,'J /i,'/I ,',1.:1111':.' ,1'('r('II~, /'dr/('('II r ',": .f,.
pol, of ,chouder (21. De oorl.aken voor de hogc Ineehani noodzakelijk. Dae hijdr:lgc sran Iller l'cn korrl' inleijill~
sehe hclJsrillg I,iin clecls re \'crkl,lJ'cn \"llluir cle lloodl.a'lk o\'cr de anawillic \',111 de hm'ensrl' e\rreillireir ell cen r<lC",.".( ,/1/','1."/"" \",,/,'•• 1,/111
( orn"'!1nl)lkllllt·.ll.h·..·,: \',111 dn wr ,r<lhilis,HIl' V:lll de ,clHludcr rijdellS rol.sroeI3:111dl·ijvillg lichring op dc hebsring. VCI'\'o!gl'ns \vordr cell ,1,lIH'111ll()'l·\lll.·~·h(l/·q o...[r.1.I1 lJ, 1(l ~ I I; I \lll,tl·rd.lll)' ().~n ·1·14X4:-\1l CI1 de ""Iile \\"larop de <l<lnclrrjfkrachrcn kunnen worden !;e1ijke O(H'z'lkell vall die huge helasring hcsprokcll. (\;111 d l '
66

..... 1- III I{ I \ ..... l) .... T I J Il"" I..' H It (t- I
rY$I(){(),~J~(hc ('I{ n/(,(/)dllfSc.:hc {JCL.lSltng t'd/l rO{S(l)cll'i,dc1l
VUOR FYSIOTHERArlE
III ~ I 1 99(,
3 "I'd,' wlll'dcn ~csrc'ld: de :l<1ndt'ijikr:lchrl'n, dc haepelsnel
heid, her tl1l1tl1CtH \'all de h:1I1d op de hoepel en de tl1ech'l
ll"che hel.hrlng \"111 schollder, eliL'hoog en pols.
De anatomie
In reg,ensrelling ror her been is de arm eell nier-gespeciali
seerde extremite-ir. De :Htl1 is niet geevoilleerd als een ex
trcmiteit die specifiek geschikt is voor het uitvoeren van
<'ell cnktl rvpe taken. In regendeel, de arm kan worden ge
hl'uikr voot' een grote diversiteit aan rakcn, varierend V'ln
de mani~lularie \'an kleine voorwerpen tot her omgaan met
zware tot zeer zw,He voorwerpcn. Bovendien kan mer de
,lrm een groat gebied worden besrreken. Anaromisch ge
zlen uir dir zich in de aanwezigheid van een flexibele
scholldergordel in rcgensrelling ror een relMid srar hekken hij her been.
De he\\'egingsmogelijkheden \'an de arm zijn bijzonder
groor. Dir is gedeelrelijk her gevolg V'1I1 her feir dar de ;]nn
\'ia de schoudergordel ,1an de romp is verbonden en dar de
schoudergordel zelf bewegelijk is. Door verplaarsing en 1'0
r'Hil' van her sehouderblad ren opzichr van de romp kan de
oricnrarie van her gewl'iehr russen her sehollderblad en de
:Hm, her I.ogenaamde glenohumerale (GH) gewrichr, een
HHldig worden gewijzigd. Hierdoor wordr her hereik van
dc :Hm fors vcrgroot. De spieren die van her sehouderblad
Il'lM de romp lopen I, spelen hierin een belallgrijke 1'01. Her
spreekr v'111zelf dar dit veel van de coordinatie van de be
rrokken spieren vraagr.
Fen rwcede red en vtJor de grore bewegelijkheid is dar her
C;I-!"gewrichr een hiizonder rllirn gewriclH is met een klcinc
kom (her glenoid) en een grore kop (de hUll1eruskop). In
hcr gewrichr zijn wwel roraries rond drie assen mogelijk
,lis enige rranslarie. Hierdoor heefr de arm ook met een ge
ti"el'rd scholldcrblad cell rllime hewegingsmogl'lijkheid.
Ondanks her feir dar her GH-gewriehr zo ruim is,
(slIhllllxeerr her nier vaak. Verondersreld wordr dar de
spierell van de zogenaall1de 'roraror cllff2, hiervoor in
hoge mare veranrwoordelijk zijn. Ook hiervoor zal de
coordinarie vall de herrokken spieren van groor belang
zijll.
Fysiologische belasting
Roisroelrijden is f}'siologisch gezien een illspannende acti
vireir voor de bovensre extremitciren. Met deze uirspraak
wordr bedoeld dar rolsroelrijden een inspannende bezig
heid is die veel energie vraagr. Dir is in de eerste plaars het
geval tJmdat mer de hovenste extremiteiren relatief weinig
vermogen k:lr1 worden geleverd. Uir zogenaamde 'arm
cl'<1I1k' resren (fiersen mer de armen) is gebleken dar tijdens
dllllrarbeid ll1axirnaal 150 Wan kan worden geleverd, ter
\Vljl bij fiersen waarden tot ongevecr 500 Wart mogelijk
/ijn. Hil'rnaaSI hlijkcn mensen lIirslllirend mer cen lage efficietltlL' arm'Hbeid re kunnen Ievl'ren. De effieiemie \'oar
'.Itlll Ct',lnkitlg' (ficrSl'tl mcr de armen) ligl rond de IS'X"
\\T\\'ill rijden In cen hocpelrolsrocl Cl'n dfici~nl ie oplcvnr
ell" /,·I<I(n h,!\'en ell' Il1'~(, klltllr. \1001" iierscn \Vllrdcn n
l'l:hrl'r \V;Lll'dell ror 251~/:1 gCI'<l1"p0l'(ccrd.
De oorzaak van de Llge eHiciemie V:111 armarheid ZOll klln
nen ligg,en In de anaromie V'ln de at'm, mer de noodzaak ror
sr,l hi Iisarie \"111 de schoudergordel in her a Igemeen en her
CH-gl'\\richr in hcr hijzondL'r. \lollr rolsroelrijden ZOli ho
vendien de slechre atsremming van de rolsroel J;]n de gc·
brlliker een ongunsrige invloed kllnnen hebben.
Om de oorzaak van de lage eHicienrie te kunnen achrerha
len is, n'lasr fysiologische meringen, de colleerie en inrer
pretarie van biomeehanisehe mformatie noodzakelijk. In
spanningsfysiologisehe dara geven informJtie omrrenr de
groorte van de inspanning die de gebruiker moer leveren in
rermen v;]n energie\'erbruik, maar zijn moeilijk re inrerprc
reren zander een kwanrificering van de geleverde arbeid.
Mer behulp van de biomechaniea en vooral mer hehulp
van biomechanisch modelleren kan dar weI.
Mechanische belasting
Uir de klaehten bij mensen die gehrllik moeren l1laken \'J.n
een hoepelrolsroel blijkt dar mer name schoLlder- en pols
klaehren veelvuldig voorkomen. Uir literaruurstudies blijkr
dar rond de 50% van de mensen mer een dwarslaesic lasr
heefr van de polsen en russen de 30°,{, en 50'Ya van schou
derklachren (2,3,5). Het z6 frequent voorkomen van deze
klaehren geefr aan dar de meehanisehe belasring waar
schijnlijk hoog is. Een van de redenen van de hoge mecha
nisehe belasting in de sehouderregio kan liggen in her feir
dat er veel spierkraehr nodig is am de sehoudergordel re
srabiliseren en mer name om luxatie van her GH-gewrichr
te voorkomen. De extra spierkrachr 'die hiervoor nodig is,
zou kunnen leiden ror overbelasring van diezelfde spieren,
maar ook ror een hoge compressiekraeht in her GH-ge
wrichr.
Om een indrllk re krijgen van de meehanisehe belasring
van rolsroelrijden is een biomeehanisch model noodzake
lijk. Voor de berekening van de cxtra kracht die noodza
keliJk zou zijn 0111 de schouder te srabiliseren, is een model
nOOdzakeliik dar verdeI' gaar dan de berekening van nerro
momenren en ook de spierbijdragen modelleerr.
Biomechanisch model
Een recenrelijk onrwikkeld biomeehan iseh model van de
bovenste exrremiteit is roegepast om inzieht te krijgen in
de belasting van rolsroelrijden en in de inrermusculaire
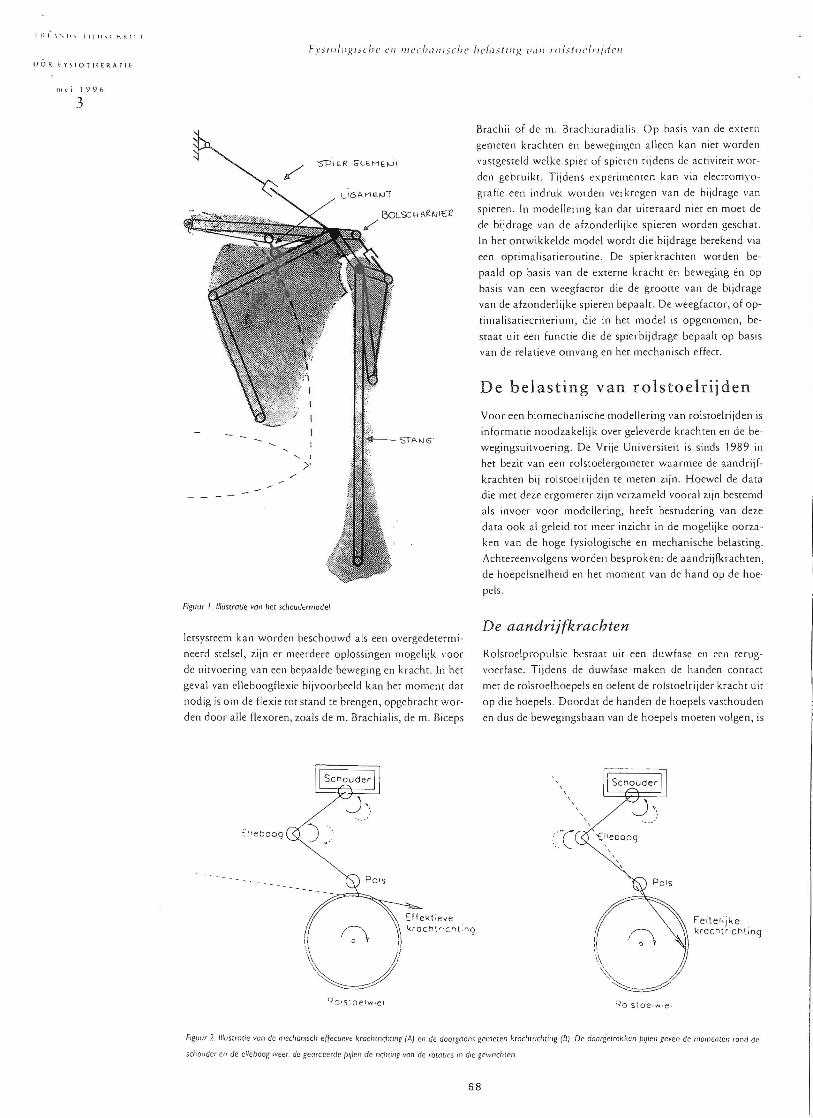
eoordinarie in die raak. Flgum 1 is een vereenvoudigde iIlustrarie van dit model van de sehoudergordel (6). Het vol
ledige model is bijzander omvangrijk. Het besraar uit de
segmenrell thorax, sehoudergordel, bo\'enarm, onderarm
en hand. Daarnaasr bevar her model aile sehoudergordel
spieren, de belangriikste armspieren en ligamemen. De
spieren worden gerepresenteerd door 'aeruaroren' ofwei
elememen die kunnen verlengen en verkorren maar uitslui
rend in vcrkorringsriehting ncrief krachr kunnen leveren.
Her modclllCvar oot< een aantal strueruren die ligamenren
voorstellcn. Deze kLlnnen verkorren 7.onder d'H da:Hvoor
cen e"rerne krachr nodig IS. \Xianneer cr ccn grorc krachr
op de lig~ltllCnrCn wordr uirgeocfcnd, kunnen I.e eveneen,
(tll,u[?,in:lal) vcrlengen (()). Omdal hn Illenst'lijk spierskc
67
1. De scnpulothoraca1c spieron
7.ijn In.pecroralis minor, rn.levator scapulae,
Ill.rhomboideus, m.trapc7.ius en
Ill.serratus ,lntCrlOr.
2. 1)c rotator (u If worth ~~\'()rl1ld dnor de
Il1.S11pr:lspll1,ltllS, de 1ll.1l1Ir,1\rin:Hus. dl'
1ll.~tlh~(,lPllL\t I" <:1\ de 1l1.tl:n:"
111111(lf.
I I: l~ \ '\ (I" I I I II ,,~ H H \ I (
0(,,1 R (. Y ~ lOT It F. R A I'll:.
lIll· ill) l) 6
3
1-',';/o/"!;1>(/)(, ('II 11IL'c!Jdlll'c/)(' l)clu'{I1I,~ 1',111 r"/.'{"c!rIjd('1I
$PIE-I< bLE-ME""
STANG'
Figuur I. I//uscratie von hel sclJoudermode/.
letsysteem kan worden beschouwd als een overgedetermi
neerd stelsel, zijn er meerdere oplossingen mogelijk voor
de uitvoering van een bepaalde beweging en krachr. In het
geval van e1leboogflexie bi)voorbeeld kan het moment dat
nodig is om de flexie wt stand te hrengen, opgebracht wor
den door aile f1exoren, zoals de m. Brachialis, de m. Biceps
~'Ieboog ) ~::
~'fe~\;eve
\\ <rOC"~"cnt:"g 1,,\ ( a \ ;1
. . ~
\~,JI
r)::.'s:oe1w'e l
Brachii of de m. Brachioradialis. Or basis van de extern
gemeten krachten en bewegingcn alleen kan niet worden
\,astgesteld welke spier of spieren tijdens de activiteit wor
den gehruikt. Tijdens experimenten kan via electromyo
grafie een indruk worden verkregen van de bijdrage van
spieren. In modellering kan dat uiteraard niet en moet de
de bijdrage van de afzonderlijke spieren worden geschat.
In het onrwikkelde model wordt die bijdrage berekend via
een optimalisatieroutine. De spierkrachten worden be
paald op basis van de externe kracht en beweging en op
basis van een weegfacror die de groone van de bijdrage
van de afzonderliike spieren bepaalr. De weegfacror, of op
timalisatiecriterium, die in het model is opgenomen, be
staat uit een functie die de spierhijdrage bepaalt op basis
van de relatieve omvang en het mechanisch effecr.
De belasting van rolstoelrijden
Voor een biomechanische modellering van rolsroelrijden is
informatie noodzakelijk over geleverde krachten en de be
wegingsuitvoering. De Vrije Universiteit is sinds 1989 in
het bezit van een rolsroe!ergometer waarmee de aandrijf
krachten bij rolstoelriiden te meten zijn. Hoewel de dara
die met deze ergometer zijn verzameld vooral zijn bestemd
als invoer voor modellering, heeft hesrudering van deze
data ook al geleid tot meer inzicht in de mogelijke oorza
ken van de hoge fysiologische en mechanische belasting.
Achtereenvolgens worden besproken: de aandrijfkrachten,
de hoepclsnelheid en het moment van de hand op de hoe
pcls.
De aandrijfkrachten
Roisroeipropuisie bestaat uit een duwfase en een terug
voerfase. Tijdens de duwfase maken de handen contact
met de rolstoelhoepels en oefent de rolsroelrijder kracht uit
op die hoepels. Doordat de hand en de hoepels vasthouden
en dus de bewegingsbaan van de hoepels moeten volgen, is
, \
\ ,,, ,,
'(I'eDoog.'( ,
,, ,,,
Feite1ijke l<rachtricn( i ng
~o·s:oel>H'e.
Flguur 2. Illustrmie van de mccllQrHsch effemcve krachlnciltiflg (A) en de doorgnons gemcren krac!lwc/Hing (8). Dc doorgerrokkcn p!jlerl geven de lllornen(Cn rond de
schOlldcr CII de ellcboog weer. de gcmccerdc P'J'cli de nc/Hillg von de rofOlIcs In dIe gcwnc/ui>!l.
68
" \ 1'1 [( t \" tJ ~ \ r JII" I. II Ii I t I
r"='ftJ/u,!!.J,.:.cl.l(' C'tl IIICC·h,Ufl.... ('!JC IJCl,l:itill:!. l',ln J'(,I."!(/l·lu/c/c·ll
\'OOK FYSIOTHERA}>IE
III I.' 1 1<) \) (,
3
ck c1uwhnvq;ing LL'11 gelt-iue hewegmg: een heweging
\\',l,lrh,j her hewegingsrrajen van de handen wordr be·
1',1.11d door de haan van de hoepels. Dir heefr ;115 canse·
clue'lni,' ,hr de richring wa'1I'in 'landrijfkr'Khr wmelr uirge
"L'icnd, nicr rechrsrreeks effecr heefr op de bewe
~In~srichrin~ \',In de h,lnden, lOals Yom nier-geleide beIVe
~ln~Ln her geval Wli zijn. Bij de geleide beweging 'rolsruel
rijden' 7.al de uirgeoefende krachr bijdragen aan de voorr
,rllwing lOlanger spr~ke is van een krachrcomponenr in de
JLlairiehring V'ln de hoepels. Ofwei, de duwkrachr hoefr
nicr l11'lar bi.n wei worden uirgeoefend in de mechanisch
nlccsr effeerieve riehring, die kan worden gedefinieerd ;1ls
r,lngenrieel aan de hoepels.
Srudies naar de kraehrleveranrie bij rolsroelrijden hebben
duidelijk gem;13.kr dar de aandrijfkraehr die rolsroelrijders
up hun hoepels uiroefenen, inderdaad nier op de mecha
nisch meesr effeerieve manier wordr uirgeoefend. Figullr 2
dlusrrcerr her verschil russen de mechaniseh rneesr eHee
ricvc kraehrrichring (figuur 2a) en de regelm<1rig gemeren
kraehrriehring (figuur 2b). De mogelijke reden van deze op
hcr eersre geziehr ongllnsrige siruarie kan mer behulp van
dc hiomechanica herer worden begrepen. Mer hehulp van
de inverse dYnamic3..l kan worden herekend dar her leve
ren van een krachr gelijk aan de effecr;eve krachr in fIguur 2a, zou moeren plaars vinden via een anreflecrerend
l11ol11enr rond de schouder en een flecrerend momenr mnd
de elleboog. [n figuur 2 ?iin de momenren weergegeven
door de doorgerrokken pijlrjes hi; de gewrichren. Aan de
andere kanr moer de hand de hoe pel blijven vasrhouden
om kraehr re kunnen uiroefenen op de rolsroelhoepels. Dir
kan aileen n1<lar via anreflex ie ill de schouder ell exrensie ill
de elleboog. In de figullr zijn deze rmaries rand de Schou
cler ell de elleboog weergegeven door ollderbroken pijlrjes.
V'1I1 de spieren rond de e1lboog wordt in de siruarie mer de
effeerieve kraehrrichring een f1ecrerend momenr gcvraagd
rcrwiil de ellchoog wordr gesrrekr l De conseqllenrie hier
\an is dar er rond de e1leboog een negarief vermogen4 lOll
worden geleverd. J',;egarief vermogen berekenr energiever
lies. In dir geval kan her negarief vermogen aileen worden
geleverd door de elleboogflexoren regen de elleboogsrrek
king in krachr re laren leveren, ofwei excenrriseh re laren
conrraheren. Her zal duidelijk zijn dar de bijdrage van de
cllehoogbuigers weliswaar een effecrievere krachrrichring
mr gevo[g zal hebbcn, maar dar de groorre van de rorale
;landrijfkraehr zal verkleinen. Een dergelijke aandrijfrech
Iliek is 7.eer wartrschijnlijk fysiologisch nier efficienr.
De siruarie in figuur 2b geefr de krachrrichring weer waar
hii er rond de elleboog geen regensrelling russen nenomo
l11enr en bewegingsrichring besraar. Bij vrijwel aile prod
personen die rur nu roc zijn gemeren, is een in mechanisehe
rLrmen ineffecrieve krachr gevonden. Her lijkr daarorn
waar,chijlllijk dar mensen voor deze vorm van kraehrleve
r'1I1rie kiezen. De vcrundersrelling ligr voor de hand dar de
'illcffeericve' vorl11 van krachrleveranrie de mcesr effieienre
'(Iplossing' is voor her rijden ill ecn hoepelrolsroel, Her ril
den Iller ccn dfeeriever gerichre kraehr 7.OU namelijk lei den
[I'll "nngil'\'Crliczt'n op her ni\'('au v,m de ellehoogflc.xoren.
Chni"L'Il\ wurdcn dc hi-arriculairc ,pincn in de hovcnarm
<Til rq!,llierendc tlillcric r(lq!,ed:lL'hr dic de marc \',In cfkdi
vireir van dc kr'lchrrichrin!'. bera'llr (4). Or dir illderda'ld
her geval is, is nog nicr aangeroond.
VOOJ' de tYsiologischc belasring van rolsruelrijden berekellr
her h()\'ensra'lnde d,n de lagc dficienrie van rolsroclrijdcll
in ieder geval vom eell deel hL'[ ge\'olg z;ll zijn V'ln een nier
oprimale afsremming van de rolsrocl aan de gebruikcr. Een
rolsroelontwerp wa3rbij de kraehr cHecriever kan wordell
gerichr waarbij geen sprake is van een regensrelling russen
nerromomenr en bewegingsrichring, zal ongerwijfeld lei
den (Or een hogerc dficienrie en dus een lagere fysiologi
sche belasring. Her is dus zaak re lOeken naar een rolsroel
insrelling die her mcesr efficienre krachrrrajecr koppelr aan
her meesr dfecrieve rrajecr. [mmers, de zirposirie van de ge
bruiker en dus de posirie van de sehouder ren opzichre van
de hoepel, of de groorre van de hoepel, heerr onmiddelijk
eHecr op de combinarie van nerromomenren die nog lei den
rO[ de afwezigheid \'an de eerder geschersre regellsrelling
russen momenr en bewegingsrichring.
Op basis vall de hier besehrel'en bel'indillgen lijkr her zin
1005 om rolsroelgebruikers re leren hun duwk rachr meeha
nisch effeeriever re richren. Dir is overigens een bevind'ng
die feirelijk geldr voor aile geleide bewegingen. Bij fiersen is
inmiddels 'langewond dar rr'linen op een effecrievere kraehroverbrenging nier leidr r()[ een hogere effieicnrie (7).
De hoepelsnelheid
De fysiologische belasring vall rolsruelrijden blijkr afhan
kelijk re ziin van de omwenrelingssnelheid van de hoepels
16). Hoe hoger de olllwcnrelingssnelheid, hoe lager de eHi
cienrie waarmee kan worden gereden. Een van de mogc
lijke oor7.akell hiervoor ZOll de zogenaamde"mechanisehe
bererking" (8) kllnnen zijn. War hiermee wmdr hedoeld,
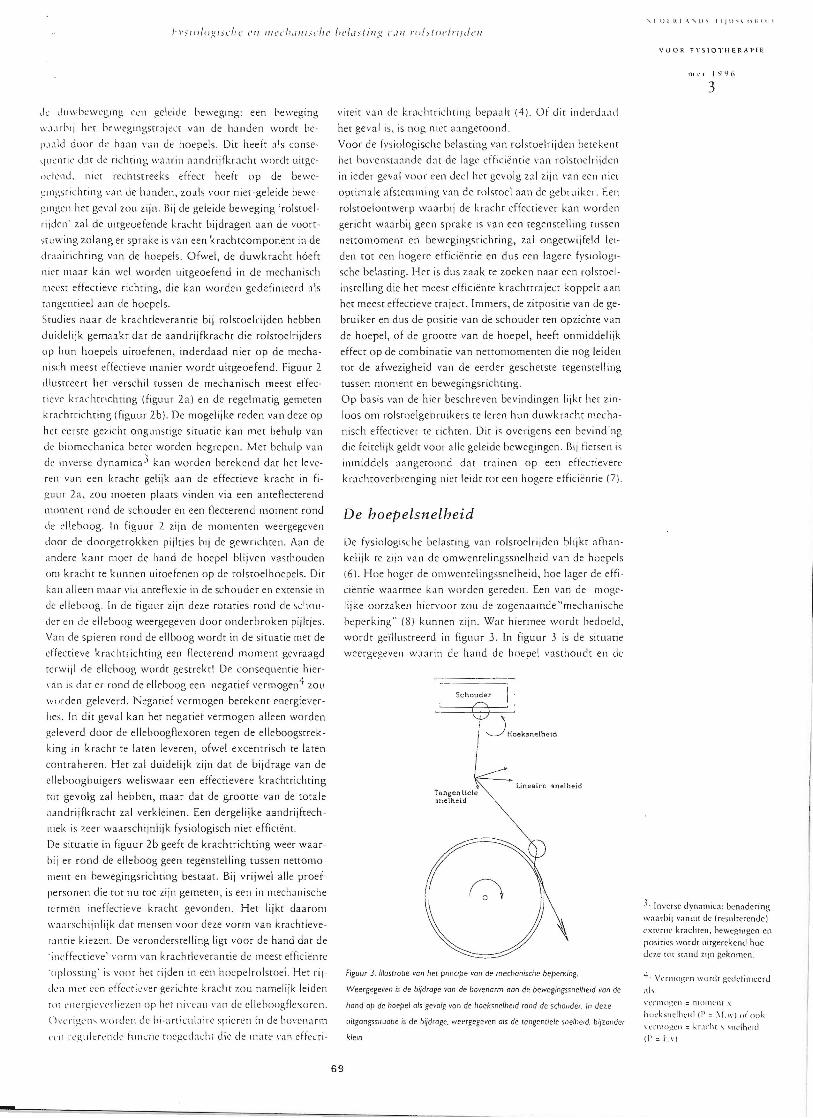
wardr ge'Jllw;rreerd in figllllr 3. [n figuur 3 is de sirllarie
wecrgegel'en waarin de h'lnd dc hoepel vasrholldr ell de
Line8lre 9nelheid T6ngen Uele :melheid
Figuur 3. /IIusrroCJe van her pr!llCfpe van de mechanische beperking,
Weergcgeven is de bijdra~e van de bovenarm aan de bewegingssnclhe,d van de
hand ap de haepel 01, ~evalg von de hock,nclhe,d rand de 'chal/der. 11/ deze
ui(gangsslllJone is de bijdragc. weergegeven als de wngenriele me/herd, bijzonder
klein
69
.L Inv('rs(' dynamic:t: bcnadering w:1ilfbil V.101llt de (rtsll!rcrcnJc)
exrL'rIlC kr;'H.:hren. hewt:gingeo en
rnsiries wordr uirgerekend hoe 00.(' wr ~r.1nJ 7.ijn gekomeo.
4, Vl'fIllO~l'n wordr gcddillll'crJ
"k \:t'rllw~('n = nlomt'l\\ \
hllCk:->l1dhcld (p = \1.",) Ill' (Jok
\ l'l"lIlO}!.L'll = kr.lt"llr " \nclht.'id II' 1'.<'10
~-

HI \ ..... 11, \ Illl'l 11\\11 l
I·Y;:;/(d(/gl~(1.1{' l'll 11I('(loldJlI~(-J.I(> 1)('/d>(II/,~ { .. til /"()/i-(cll'/rl{t/eJl
OK FYSIOTHEH,\I'IF,
IIi lO I I 99 {,
3
S. Dc hocl'c1snelhcicilVllVorJI gcdcfilllccrJ als V = lV.r IV is de IlIlcalfC sllclhcid, \\' IS dL' hOl:k~ndhc.:id 1.'11 r is de "rrila]
\',\11 dt, hOl'pc.:!L
(L Dc linc:llrl' \'t'rsnt'lllll~ \\'orJl
~l'ddlllll'nd :ll".l ::: cr.. 1 (:1 I" d(,o Illlr,lll"C \TI SIl(,llillg, (Y dl'
h(}d'\'l'r~lH'lhll~~ ell r de qr.l;l!, III
dH gt',,:d dt: kllgrc \ ;lll hL'1
"l'~1ll("(Hl.
arm redelijk \'er gesrrekr is. Om de hand de hoepel re [,Hen
wlgcn is een snelheid nodig die gcrebreerd is ~'11l de om
wenrelingssnelheid van her wiel en de diamerer van de hoe
pel 5 . Die snelheid nwer worden opgebrachr vi,] de ror,Hie
snelheden in schouder, elleboog en pols (en narullrlijk via
depressie van de schoudergordell. Voor de relarie [Llssen
rorariesnelheden rond gewrichren en lineaire snelheden
van de segmenren geldr eveneens dar de lineaire snelheid
\'an her segmenr afhankelijk is van de hoeksnelheid in her
gewrichr.
In figullr 3 is de bijdragc weergegegeven van de hoeksnel
heid rond de scl10uder aan de benodigde snelheid van de
hand. Uir deze figuur wordr duidelijk dar de rangenriele
snelheidscomponenr bijzonder klein is wanneer de boven
arm bijna in lijn mer de gewensre handsnelheid ligr. Voor
een grorere bijdrage zou de bovenarm verder moeren zijn
gererroflecreerd. Uir de figuur valr revens af re leiden dar
voor her blijven volgen van de hoepel een exrreern grore
hoeksnelheid nodig worde Her is nier onwaarschijnlijk dar
de handen bij een gegeven snelbeid de hoepels gewoon nier
meer kunnen volgen. Dir berekenr dar er \'anaf dar mo
mem geen sprake' meer kan zijn van krachroverbrenging.
Voor krachroverbrenging is echrer ook nog versnelling,
nodig. Krachr is immers massa maal versnelling. De rela
rie russen hoekversnelling en linea ire versnelling6 heeh
voor dir voorbeeld als consequenrie dar er voor een geringe
krachr een zeer hoge hoekversnelling nodig zal zijn.
Voor de fysiologische belasring van rolsroelrijden berekenr
her besraan van de 'mechanische beperking' dar een lagere
tysiologische belasring zou kunnen worden bereikr door de
linea ire snelheid van de hoepellaag re houden, of de srrek
king van de arm beperkr re houden.
Ret moment van de hand op de hoepel
De proefpersonen oefenden een behoorlijk g'rom 1ll0mell r
op de hoepelbuis uir. Dir bleek uir her aandrijfmomenr dar
rond de wielas van de rolsroelergomerer werd gemeten en
de krachten die op de hoepel werden gemeren. Dir momenr
is voor re srellen als een combinarie van een rrekkrachr mer
de wijsvinger en een duwkrachr reI' hoogre van de carpale
runnel. Uit berekeningen van de groone van dar momem
bleek dar dir gemiddeld zo'n 40% van de groone van her
aandriifmomem kon vormen. De rich ring van her momenr
bleck gedurende vrijwel de hele duwfase rem mend re zijn.
De proefpersonell werkren zichzelf als her ware regen (9).
Een van de mogelijke redenen hiervoor is dar de hoepels in
een srevige greep moeren worden genomen om voldoende
comacr mer de hoepels re houden en krachr rc kunnen
overbrengen_ Her gevolg hiervan ZOli kunnen zijn dar de
hand gedurende de duw vanuir radiaalabductie in ulnai
rahducrie wordr gedwongen, rerwijl bijvoorbeeld de pol
sexrensoren actief zijn (biivoorbeeld vanwege hun funcrie
rond het cliebooggelVrichr; zie 9).
ller is aal1l1emelijk Jar her halldmOlllenr een ongunsrig effecI hcdr "p de fl'siologische helasring. [en aandrijfrnc
Ch'lllisrne W'l'Hhij her vcrschilmomenr k<ln worden gencu
rraliseerd, 1.,11 W'l<Hschijnlijk cen sruk dficiemer lipl.
Procfpersonen wcrd gevra'lgJ mer cIOn dikkere hoepelbuis
rc rijden. Dir onderzoek (9) roonde geen significanr gunsri
gel' resu!r,lar aan wm berrefr her moment van de hand op
de hoepel, fvsiologisch cchrer lVas her wei iers efficienrer.
Resultaten van modellering
Het eerder beschreven biomechanisch model van de bo
I'ensre exrremireir is roegepasr op een quasi-srarische bena
dering van rolsroelrijden (10). Hierbij is de rolsroelaan
drijfbeweging gesimuleerd door een aamal posiries van de
hand en op de hoepels, die rCZ<lmen her bewegingsrrajekr
van de handen beschriiven. De aandrijfbeweging werd on
derverdeeld in vijf handposiries op de hoepel, lopend van
15° voor her hoogsre pun r van de hoepel ror 60° voorbij
dar hoogsre punr. Bovendien werden de meringen uitge
voerd regen vijf verschi\lende weersranden, die opliepen
van 0% ror 40% \'an de maximaal leverbare kracbr
(244±20N voor de rec!l[er arm, N=lO) op de hoepel. Her
model is vervolgens gebruikr om de bijdrage van de arm
en schouderspieren aan de anndrijfbeweging re berekenen
en de compressiekrachr in her GH gewrichr re scharren.
De stabilisatie van de schouder
De mechanische belasring van rolsroelrijden op de schou
der is geschar mer behulp van her eerder beschreven bio
mechanisch model (5,10). be resulraren van deze bereke
ningen zijn weergegeven in Figullr 4. Uir de berekeningen
bleek dar, wanneer lIirgegaan werd van een srarische helas
ring van rnaximaal 40% van de Illaximaa\ leverbare aan
drijfkraclH, de gewrichrsreacriekrachr in het GH-gewrichr
kon op/open ror 2000 N. Een van de hoofdoorzaken van
deze hoge waarde bleek de spierkrachr re zijn die nodig
was voor de srabilisering van her GH-gewricht. Figuur 5
geefr cen overzichr van de berekende spierkrachren voor de
spieren van de roraror cuff en de spieren die alrijd worden
beschouwd als primair veramwoordelijk voor de aandrijf
krachr. Uir figuur 5 blijkr dar de bijdrage van de spieren
van de rorarar cuff aanzienlijk is. Deze krachr was voorna
melijk nodig om ervoor re zorgen dar her (gemodelleerde)
GH-gewrichr nier Juxeerde. Hoewel de grore arm-schou
derspieren, zoals delroideus and pecroralis major, vaak
worden beschouwd als de belangrijksre comribuanren nn
de re leveren krachr, blijkr bovendien dar de subscapularis
minimaal een evengrore krachr leven.
Uir de resu[raren valr af re !eiden dar de mechanische be
lasring in de schouder ongunstig wordr h6nvloed door de
noodzaak [Or her aanwenden van spierkrachr voor de sra
hilisatie. De noodzaak wr her gebrllik van spierkrachr zal
revens een ongunsrige invloed hebben op de fysiologische
belasring. Of de voor her GH-gewrichr berekende hogc
reacriekrachr wr overbebsring \''In her gewrichr leidr, valr
naruurlijk moeilijk I'asr re srellen. De eerder genocmdc epi
dellliologischc gegelTns mcr herrekking ror de incidenl it'
van schouderklachrcn suggercrcn till echrer wcl (2,3,4).
70

h',iof"gisdu' ['II III['C/'dlli,,!J[' fle/ds/jllg L',III ro/slue/riiden
Nello kracht op het GH gell'richt ("<=.11 Compre~siekracht op GH gewricht (N=3)
.// .
1:!5 :!OOO-I
'.'.IlX '.' Z "'", 'I~:
11 z E u E [DUO""
u2 :;-[,;,o;'}' l'!::<: I Hand Hand posilie positie
I
25
o.
J
/~~/L..V~~'cu" ::<:
0% 10% 20% 30% 40% uc;;., 10% 20% 30% 40%
Weerstand (%) Weerstand (%)
FiglJur 4. Gemidde/de resulwen voor de berekelJing van de netto krachten ap het glenahumerale gewricht (links) en de berekende campressiekroclll in dO[ gewricht
(reChls).
JBerekende spierkrachten tijdens rolstoe~rijden
PP 1, weerstand 20% 1200
o
200
400
1000
600
Handpositie
~ D•_15 0 +150 +600
(N)
compressie Supr Infr TeMi Subs DeAn PeTh Peel kracht
Figuur 5. Vio 11Ct sclloudermodel berekende spierkraduen van een se/eerie von
schouderspleren. tezamen met de compressiekracht Supr = supraspinatus, logisch te veronderstellen dar de belasring van rolstoelrij
Inrr = infraspinatus. TeMi :::: teres minor, Subs:::: subscapularis. DeAn = den navenanr hoger zal zijn. Adviezen tel' vermindering
deltoideus pars anterior, PeTh = pectoralis major, pars tharaca/e, PeCi = van de belasting wilen daarmee rekening moeten houden.
pectoralis major. pars claviculore. De feitelijke bruikbaarheid van aile schouderspieren be
paalt of advies zinvol is, bijvoorbeeld wanneer gedacht
wordt aan een zithoogteadvies waarbij wordt uitgegaan
van een efficienre inschakeling van arm- en schouderspie
ren. Algemene adviezen en basisregels voor rolstoelinstelHet effect van een incompleet ling zijn daarom moeilijk te geven. In feite zijn er tweespiers kel ets tels el wegen mogelijk om de individuele gebruiker te kunnen ad
De beschrijving van de factoren die van invloed zijn op de viseren.
belasting van rolsroelriiden, zijn tot nu toe gericht geweest In de eerste plaats kunnen de verschillende instellingsmo
op algemene principes, van toepassing op een 'able-bo gelijkheden Van de rolsroel per gebruikersgroep worden
died' gebruikersgroep. Voor de mindervalide populatie is vastgesteld. Deze methode bestaat uit het bepalen Van de
een dergelijke benadering nier roereikend en is een benade fysiologische belasting voor een scala van rolstoelinstel
rillg noodzakelijk waarin de (mechanische) effecren van lingsmogelijkheden hij een vooraf gedefinieerde gebrui
"andot'ninp,en 'l,m het bewegingsapparaar moeten worden kersgl·oep. Hierbij wordt voor verschillende rolsroelinstel
herrokken, Her is zen waarschiinlijk dar rolstoelgebrlIi lingen het energieverbruik gemeten tijdens een standaard
kers mer een sroornis ;1,ln cen \'an de sp'eren van de schou rijraak. Uit de verschillen in energieverbruik valt dan af te
ckrgorde\, snieul.e prohkmen wilen krijgen mer een "de lei den war de fysiologisch minsr belastende rolstoelinsrel
'iU,He' SLlbiliscring \',11 hel CH-gewril'hr. Her is d"n ook ling is. In samenwerking mer her Rcvalidarie Centrum Am
71
~f(ll::.HI. ..'Nl)~ rlJI>SCHRl1- I
VOQR FnlOTHERAP1E
me i 1996
3

3
HI ''\,1'" lllll"{ llltil I
f."si(J{(}~I~(I.,(' ('11 J)/C'({'d1l1i( /.,{, l}t'/d~('J1,!!. [",/11 n'/:::'[II('/n/./('1I
I(pH FYS10TH~K'\I'IE
mel 19")6
sterdam tracht de Vrije Universiteir dezc methmk roe te
passen hij her adviseren van de zithoogce bij rolsroelgl'
bruikers met een dwarslaesie. De merhode is l'chter zen ar
heidsintensief en de verschillen in fysio[ogischc belasring
Z.iP1 erg klein ten opzichre van de foutenmarge V'1n de be
schikhare meetmethoden.
Een tweede mogelijkheid is het voorspellen van de opti
male rolstoelinstelling voor gebruikers met specifieke aan
doeningspatronen op basis van uitgebreide biomeehani
sche modellering. Het olltwikkelde model van de bovenste
extremiteit maakt het inmiddels mogelijk via de weg van
de inverse dynamiea de mechanische helasting bij rolstoel
rijden re herekenen. Het lijkt tevens mogelijk te zijn dir te
doen voor de fysiologische belasting. Daarnaast wordt er
hard gewerkt aan de olltwikkeling van een voorwaarrs dy
namiseh model. Met dit model kan, gegeven een speeifiek
uitvalspatroon in de bovenste extremiteiten, een rolsroelin
stelling worden hepaald waarbij de bijdrage aan schouder
stabilisatie klein is en de effectiviteir van de krachtover
brenging optimaal. De individuele bepaling van de
optima Ie rolstoelinstelling komt dan binnen bereik.
Consequenties voor de praktijk
De hier beschreven resultaten bebhen belangrijke conse
quenties voor (het zoeken naar) de optimale aandriifteeh
niek en advise ring ten aanzien van de meest geschikte ml
stoelinstelling. Het lijkt zinloos om rolstoelgebruikers te
leren hun duwkrachr mechaniseh effectiever te richten,
wat vrijwel zeker zalleiden tot een verlaging van de wch al
lage efficientie. Het is bovendien waarsehijnJijk dat een
dergelijke techniek zal leiden tot een hogere mechanisehe
belasting en dus ook tot een sneller optreden va n klachten
aan her spierskeletstelsel. Een mechanisch effectievere
kraehtrichting is betel' re hereiken door een andere rol
swelinstelling te kiezen. Daarhij moet wei altijd rekening
worden gehouden met het effect van die instelling op de
rijeigenschappen van de stoe! en met name de rolweer
stand en de stabiliteit. Beiden zijn (tegengesteld) afhanke
lijk van de positie van het lichaamszwaarrepullt ten op
ziehte van de wielas.
De besehreven 'mechanische beperking' impliceerr dat een
lagere fysiologische belasting zou kunnen worden bereikt
door de lineaire snelheid van de hoepellaag te bouden. Dit
kan door middel van een versnellingssysteem of een war
kleinere hoepel. In beide gevallen veranden bij eenzelfde te
leveren vermogen de verhouding tussen kracht en snelheid.
Een lagere snelheid betekent een hogere aandrijfkracht. De
keuze voor een kleinere hoepel heeft echter als evident na
deel dat de rolstoelgebruiker ahijd een relatief grotere
kracht moet leveren, ook onder omstandigheden waarin
de gevraagde aandriifkrachten al bijzonder hoag zijn
(denk hierhij aan het oprijden van een helling of een moei
lijke ondergrond).
Het (remmendeJ moment van de hand op de hoepelbuis
kan worden voorkomen C:oor gcbruik re nl;\kcn van cell
aandrijfmechanisme waarhij het vC!"schill11()mEm k'111 WOl
den geneutraliseerd. Hierbij valt te c.lenken aan de con\'cil'
rionele hefhoomsvsrcmen of aan een hdho()1ll die rechr
srreeks op de wiel'ls wordt gel11()mecl·d. Ook een dikkerL'
hoepelhuis dan nu !'.ebruikelijk IS, 7.llU een gUl1srig effect
!-;unncn hehben.
Na'1sr de hl)Vcn!'.cnoemde '1specren diem alriJd rekCl1ing rt'
worden gehouden met de individllele capaciteiten van de
berrokken rolsroelgehru ikers_ H iermee worden de besch re
ven algemene aspecten meer of minder relevant gemaakt.
Het is evident dat de afwezigheid van een goede greep op
het handmomenl een grote invloed wi hebben bij een ge
bruiker met cervicale dwarslaesie. Minder opl'allend maar
zeker zo belangrijk, is de mogelijkheid dat rolstoelgebrui
kers met een sroornis aan een v<ln de spieren van de schou
dergordel, prohlemen wilen hehben met een adequate sta
bilisering \'an het GH-gewricht. Met algemene adviezen en
hasisregels voor rolsroelinstelling (een soorr rolstoelinstel
lingskookboek dus) moet daarom voorzichtig worden 0111
gegaan. Voor indil'iduele gebrllikers moet de ideale rol
srnelinstelling op hasis l'al1 hun restfuncrie worden he
pa'1Id.
Conclusies
De hoge fysiologische en mech'1l1lsche bclasting is deels
terug Ie I'oeren op de (slechte) afstemming van her aan
drijfsysteem op de gebruiker en deels op de morfologische
karakteristieken van de hovenste extremiteit. De hoepel
rolsroel maakt een 'ineffectieve' krachtoverhrenging nood
zakelijk, terwijl de 'mechanische beperking' een goede
kraehtoverhrenging hemoedijkt in het laatste deel van de
duwfase. Daarnaast is er sprake van een rem mend l1lomel1t
van de hand op de hoepel. Omdar de ineffectieve kr,Kht
overbrenging het gevolg lijlct te zijn van een zo efficii'm
mogelijke aandrijftechniek, is training gericht op een ver
hoging van de effeetiviteit zinloos.
De noodzaak tot stabilisering van het GH-gewricht heeft
invloed op de mechanische bela sting van rolstodrijden.
Het is waarsehiinlijk dat ook de fysiologische belasting
hierdoor wordt belnvloed. Voor rolstoelrijders met een
sroomis aan het bewegingsapparaat van de bOl'enste ex
tremileir lal de noodzaak tor srabilisatie hoogsrwaar
schijnlijk leiden tOt een buitenproponioneel sterk ver
hoogde mechanische belasting.
Biomeehanisehe modellering maakt her mogelijk 0111 de d
feeten te schatten van stoomissen aan het bewegingsappa
raat op de mechanische en fy~iologische bela~ting. In de
nabije toekoll1st hehoort ook her voorspellen van de mee~t
optimale zitpositie tor de lTIogelijkheden.
Abstract
To gain lnsig.hr in rhe callses for rhe high physiologICal and Il1cch;lni
c,lllo"d of 11l.1llual WhCl'kh<lll" propulsion,;t bioll1cch'lnical analySIS IS
1,.'~5Cllfl:d to ..:ompri<;e rhl' ch;lr.lueri~ti('~ of rhe propuls.ive (on..:l'~ '\lH..I
rhe "r;1hilt~;1ri()ll of rhe should<:r.
.\"1l"l'dlrClnL'lll of prop!11~l\'l' for(l'~ r<:'"L,;\lcd ;\ large 'J1ll'tfCLrIVt" IHlIl
(;lngt·ntial forcl' L"ompollcIH .. Tbi ... "lIldlt"dl\'C' 101 LT ~lppl'iJr~ (0 he
l',lll<.;cd h~ tI\{' (olHhlll,IIHll) oj ;, '~~IJldl'd 11l0'"Cl1ll'IH' ill ",hich the p;\fll
III till' hand" I'> t:lllhrr:ll11cJ ,wei (he !)rC\TlllI011 o( IH'g.lCiw' !Hl\\"n ll~
til{' llIu"tlc" ,lrCl\llld lht (:Iho", 101ll!" "lllhwu" ,1ppc;llTd III .lppl\ t"or(\'"
III rhe IT\o..,r dll<..:ICIH ,,",lY. }!.i\Cll tllL' ((jnfl~\Jr<li\on of hoth ll"l:r and
72

I .... I (l r It I ~ .... 0... 1 I III ... L HilI I
/-'\,51<J!<Jj;1,,)!(' ('II III('C!Jdlll:!ch(' {n'/aitiJlg 1'.111 1'{J{5!<Je!l'Iid('1I
VOOR FYSIOTflERAf'IE
m l' i 19') 6
3
Lh.\!r ..\Iso, tl~L'r ....\ppltc.:d .t Llrge:: hr"kIl1~ wrqlll' IUllt} t1w h;llldnm
fUh(' wllll.:h .1l;;1I1l <';'(.'l'l\ll,J III he c\ll~(.:"d Iw rhl' t,H.:r {hal (ht: h:Hllb h.n'l'
(tl h.I'Cp (OIH:1L'l \\"1(11 rill' flm ... \\"Illl:h ton:L' d1l'1ll t"rom f,ldt"l to 1I1n.H
.lhJuUltlll.
BIPmL·<.'h.lI1ic:.lllllnlkl1ln~01 rhl' whcckh.Hf plI"h kd {II rht' fll\dlll~
(h.n rh~ (omprl'ssjol1 force In rhe ClenoHulnl.'fallCHlll)iIH reachl'd
\·,dl\l.~<; lip ((l lOOO N, ThiS was cluscd by the large conrrihutlon of
muscles 11('ccssary for SL.lbilis;Hlotl , i.e. rhl' prcn:nrioll of joinr dislo
(,Hioll (especially rhe rtH3Wr cuff mllsd<:sl. The high compression
forCe 3nd 1ll1lScll' torces ;HC" Illdic,Jri\"c of rhe mechanical Jnd phy~i()\o·
~ll'<llln;ltl of wheelchair propulsion,
Fllrur<: mooelling will foclIs nil rhe qU.JIHlficiHlon of rhl;" lu;,d fl.'sultlng
trolll joinr smbilisarioll wirh an inromplere mlisclIloskdcral sysrem, 




























