Embed Size (px)
Citation preview

Projet de fin d’études
ANALYSE VIBRATOIRE ET OPTIMISATION
D’UN RESSORT DE SOUPAPE
Oussama SIMOU GM5 EI
INSA STRASBOURG
24 Boulevard de la victoire
67000 Strasbourg
Département Ressort Usine 1
22, route de Lobsann
67250 MERKWILLER-
PECHELBRONN
Session juin 2011

PROJET DE FIN D’ETUDES
Oussama SIMOU 2
GM5 EI

PROJET DE FIN D’ETUDES
Oussama SIMOU 3
GM5 EI
Institut National des Sciences Appliquées de Strasbourg
PROJET DE FIN D’ETUDES
Auteur : Oussama SIMOU Promotion : 2011
Titre : Étude vibratoire d’un ressort de soupape Soutenance : 15-06-2011
Structure d’accueil : INSA Strasbourg
Nb de volume(s) : 2 Nb de pages : 64 Nb de références bibliographiques : 8
Résumé : Le ressort de soupape est un élément de la distribution qui doit être dimensionné de façon à respecter les critères dynamiques et fréquentiels. Il s’agit dans ce rapport d’étudier le ressort dans son contexte vibratoire. Pour cela, il sera discrétisé de manière à calculer ses fréquences propres. A certains régimes, des harmoniques de la loi de levée viennent perturber le bon fonctionnement du ressort. Le calcul des fréquences propres sera intégré au logiciel de calcul des contraintes dynamiques, un logiciel déjà développé lors de projets antérieurs. Ce logiciel permettra de prédire le positionnement des harmoniques dangereux sur la plage de fonctionnement du moteur. Cette amélioration du logiciel s’accompagne d’une optimisation du ressort. Mots clés : Vibrations, Ressort de soupape, loi de levée, distribution, contraintes dynamiques, discrétisation, fréquence propre, harmoniques dangereux, optimisation, programme de calcul.
Traduction: Valve springs are considered as fondamental parts of an engine distribution. They must be sized to meet both dynamic and frequency criteria. In this report, the valve spring will be studied in a vibratory context. Thus, it will be discretized in order to calculate its natural frequencies. At some engine speeds, dangerous lift law harmonics appear, distrupting the normal spring’s functioning. The aim of these calculations is to improve an already existing dynamic software developed during previous projects at ISRI France, incorporating all frequency characteristics. This new software will optimize the valve spring’s design predicting at what engine speed dangerous lift law harmonics will appear.
PROJET DE FIN D’ETUDES
Oussama SIMOU 4
GM5 EI
Remerciements
Je tiens personnellement à exprimer mes sincères salutations ainsi que ma
gratitude à toutes les personnes qui m’ont aidé à la réalisation de ce projet :
Monsieur Jean-Claude LE MORVAN, directeur technique de l’usine 1 d’ISRI, pour m’avoir accueilli et avoir mis à disposition toutes les informations nécessaires pour mon projet.
Monsieur Géraud SEVESTRE, responsable de Compte ISRI France, pour son aide.
Monsieur Michel CROCHET, professeur principal à l’INSA de Strasbourg, pour son aide ainsi que ses conseils.
Monsieur Thierry ENGEL, professeur à l’INSA de Strasbourg et tuteur de ce projet, pour sa participation à la réalisation de ce projet ainsi que ses conseils.
Monsieur Christophe CORDIER, responsable du laboratoire de physique à l’INSA de Strasbourg, pour son aide significative
Monsieur Philippe GERARD, professeur de physique à l’INSA de Strasbourg, pour son aide en simulation par éléments finis.

PROJET DE FIN D’ETUDES
Oussama SIMOU 5
GM5 EI
SOMMAIRE
INTRODUCTION ............................................................................................................... 8
I. Présentation de la société et de la problématique .................................................. 8
1. Présentation de la société ................................................................................ 8
a. Identité de l’entreprise .................................................................................. 8
b. Implantation dans le monde .......................................................................... 8
c. Usine de ressort MERKWILLER-PECHELBRONN ....................................... 9
d. Procédés de fabrication ................................................................................ 9
2. Problématique ................................................................................................ 10
II. PFE effectués chez ISRI ...................................................................................... 11
1. Présentation ................................................................................................... 11
2. Conclusion sur les travaux effectués .............................................................. 12
3. Présentation du logiciel de calcul ................................................................... 12
III. Positionnement de mon projet par rapport aux précédents ................................ 14
IV. Objectifs et démarche ........................................................................................ 14
1. Objectifs ......................................................................................................... 14
2. Démarche ...................................................................................................... 15
CONCEPTS NOUVEAUX ................................................................................................ 16
I. Analyse fonctionnelle ........................................................................................... 16
1. Validation du besoin fondamental .................................................................. 16
2. Diagramme pieuvre ........................................................................................ 17
3. Fonctions principales et fonctions contraintes ................................................ 18
4. Hiérarchisation des fonctions ......................................................................... 19
II. La distribution et ses composants ........................................................................ 20
1. La distribution ................................................................................................. 20
2. Composants de la distribution ........................................................................ 21
a. La soupape ................................................................................................. 21
b. L’actionneur ................................................................................................ 23
c. L’arbre à cames .......................................................................................... 27
d. Le ressort de soupape ................................................................................ 29
3. Influence des éléments de distribution ........................................................... 30
a. Masses et inerties ....................................................................................... 30
b. Raideur ....................................................................................................... 30
c. Loi de levée ................................................................................................ 31

PROJET DE FIN D’ETUDES
Oussama SIMOU 6
GM5 EI
4. Le ressort de soupape ................................................................................... 34
a. Assimilation ressort – barreau cylindrique................................................... 34
b. Discrétisation du ressort ............................................................................. 39
c. Corrélation contraintes et harmonique ........................................................ 41
EXPERIMENTATIONS ET RESULTATS ........................................................................ 43
I. Influence des masses mises en mouvement ........................................................ 43
1. Expérience ..................................................................................................... 43
2. Résultats ........................................................................................................ 44
3. Conclusion ..................................................................................................... 45
II. Influence du détarage........................................................................................... 46
1. Définition ........................................................................................................ 46
2. Résultats ........................................................................................................ 46
a. Ressort nominal .......................................................................................... 46
b. Ressort détaré de 15% ............................................................................... 48
3. Synthèse des résultats ................................................................................... 50
AMELIORATION DU LOGICIEL DE CALCUL ................................................................ 51
I. Optimisation de la conception d’un ressort de soupape ........................................ 51
II. Présentation du logiciel ........................................................................................ 52
1. Interface ......................................................................................................... 52
2. Détail des onglets du nouveau logiciel ........................................................... 53
a. Dimensionnement du ressort ...................................................................... 53
b. La loi de levée ............................................................................................ 54
c. Résultats .................................................................................................... 55
3. Expérimentation sur un type de ressort .......................................................... 56
a. Ancienne version du ressort ....................................................................... 57
b. Nouvelle version du ressort ........................................................................ 58
CONCLUSION ................................................................................................................ 60
I. Conclusion sur les travaux effectués .................................................................... 60
II. Vers d’autres solutions technologiques ................................................................ 61
1. La nitruration .................................................................................................. 61
2. Objectif de la nitruration ................................................................................. 62
III. Apport personnel ............................................................................................... 62
PROJET DE FIN D’ETUDES
Oussama SIMOU 7
GM5 EI
TABLE DES ILLUSTRATIONS
Figure 1 : Répartition mondiale des sites d'ISRI ................................................................................ 8 Figure 2 : Vue aérienne sur l'usine 1 fabrication ressorts .................................................................. 9 Figure 3 : Étapes de fabrication d'un ressort ..................................................................................... 9 Figure 4 : Évolution des contraintes en fonction du régime ............................................................. 13 Figure 5 : Bête à cornes : Système d'étude (ressort de soupape) ................................................... 16 Figure 6 : Diagramme pieuvre "système ressort de soupape" ......................................................... 17 Figure 7 : Hiérarchisation des fonctions ........................................................................................... 19 Figure 8 : Distribution à soupape en tête à attaque directe ............................................................. 20 Figure 9 : Soupape moteur............................................................................................................... 21 Figure 10 : Différence entre la loi de levée et le trajet de la came: Décollement et rebond ............ 22 Figure 11 : Distribution à attaque directe: Le poussoir .................................................................... 24 Figure 12 : Distribution à linguet ...................................................................................................... 25 Figure 13 : Distribution culbutée ...................................................................................................... 26 Figure 14 : Arbre à cames ................................................................................................................ 27 Figure 15 : Loi de levée parfaite ....................................................................................................... 28 Figure 16 : Définition d'une loi de levée ........................................................................................... 28 Figure 17 : Mise en place du ressort de soupape ............................................................................ 29 Figure 18 : Levée et vitesse de la loi échappement (comparaison 1000 et 7000 tr/min) ................ 31 Figure 19 : Assimilation ressort - barreau cylindrique ...................................................................... 34 Figure 20 : Disposition du ressort dans ses conditions de fonctionnement ..................................... 36 Figure 21 : Discrétisation du ressort de soupape ............................................................................ 39 Figure 22 : Placement des harmoniques dangereux par rapport aux pics de contraintes .............. 41 Figure 23 : Schéma de la modélisation 3D ...................................................................................... 43 Figure 24 : Différences des efforts dues au changement de masse ............................................... 44 Figure 25 : Différence des amplitudes de vibrations de la spire moyenne d'un ressort .................. 44 Figure 26 : Résultats essais sur le ressort nominal ......................................................................... 46 Figure 27 : Évolution de l'effort linguet soupape à 5500 tr/min ........................................................ 47 Figure 28 : Essais sur la levée du ressort détaré à 15% ................................................................. 48 Figure 29 : Vitesse d'impact de la soupape sur son siège ............................................................... 48 Figure 30 : Variation effort linguet / soupape ................................................................................... 49 Figure 31 : Nouvelle interface du logiciel de calcul .......................................................................... 52 Figure 32 : Développement de l'onglet "Dimensionnement du ressort" ........................................... 53 Figure 33 : Feuille "Loi de levée"...................................................................................................... 54 Figure 34 : Graphique amélioré des contraintes dynamiques ........................................................ 55 Figure 35 : Données du ressort fournis par la feuille de calcul statique "ancienne version" ........... 57 Figure 36 : Évolution des contraintes dynamiques dans le fil du ressort ......................................... 57 Figure 37 : Données caractéristiques du ressort amélioré .............................................................. 58 Figure 38 : Évolution des contraintes dans le ressort amélioré ....................................................... 58 Figure 39 : Représentation microscopique d'une couche nitrurée ................................................... 61

PROJET DE FIN D’ETUDES
Oussama SIMOU 8
GM5 EI
INTRODUCTION
I. Présentation de la société et de la problématique
1. Présentation de la société
La société ISRI ou plus précisément ISRINGHAUSEN est un des leaders
mondiaux dans le développement de sièges de véhicules ainsi que la fabrication
des ressorts. ISRI fabrique des sièges de camions, d’autobus en plus de ressorts
dans 38 usines situées dans 18 pays. L’expérience, l’innovation ainsi que
l’orientation client sont les clés de la réussite d’une telle entreprise dans le
contexte concurrentiel actuel.
a. Identité de l’entreprise
Dénomination sociale : ISRI-France Forme sociale : Société par actions Simplifiées (SAS) Capital social : 6 179 000 € Date de création : 1er décembre 1962 Siège social : ISRI-France 22, route de Lobsann 67250 MERKWILLER-PECHELBRONN Tel : 03-88-09-86-86 fax : 03-88-80-72-07 Chiffre d’affaires : 111,74 M€ (2007) Effectif total : 584 (01/2008)
b. Implantation dans le monde
La société ISRI est représentée dans 16 pays et possède 35 sites.
Figure 1 : Répartition mondiale des sites d'ISRI

PROJET DE FIN D’ETUDES
Oussama SIMOU 9
GM5 EI
c. Usine de ressort MERKWILLER-PECHELBRONN
Figure 2 : Vue aérienne sur l'usine 1 fabrication ressorts
Ce site dégage un chiffre d’affaire de 7M€ pour l’exercice de 2010. En moyenne,
150000 ressorts sont produits chaque jour utilisant 115 tonnes de matières
premières par mois. L’usine compte environ 40 employés, dont 10% de cadres et
90% d’ouvriers. L’usine s’étend sur une surface de 4850 m2. Un projet d’extension
et de réaménagement de l’usine est en cours de négociation.
Les principaux clients sont PSA et Renault.
d. Procédés de fabrication
Après la conception d’un ressort de soupape, on passe à la phase de fabrication.
La fabrication d’un ressort de soupape (ou d’un ressort en général) passe par
plusieurs étapes.
Tout d’abord, on enroule le fil afin de donner une forme générale au ressort.
Ensuite vient l’étape de revenu. Le ressort est ensuite meulé afin de lui donner ses
caractéristiques géométriques. On passe ensuite à l’étape de grenaillage pour
améliorer sa résistance. Enfin, le ressort passe par le four de mise en température
pour la préconformation.
Figure 3 : Étapes de fabrication d'un ressort

PROJET DE FIN D’ETUDES
Oussama SIMOU 10
GM5 EI
2. Problématique
Dans le cadre de son programme Recherche et développement, ISRI France
s’intéresse à étudier le comportement dynamique des ressorts de soupapes
fabriqués sur site. Une série de projets de fin d’études programmés a été
proposée à des élèves ingénieurs à l’INSA de Strasbourg. A l’issue de ces études,
un programme de calcul dynamique des contraintes dans le fil du ressort a été
développé. Ce logiciel a permis de voir si les ressorts fabriqués respectent les
contraintes limites du matériau utilisé et servent aussi de support d’étude pour les
clients.
Cependant, les études effectuées s’intéressaient beaucoup plus au comportement
dynamique sans pour autant prêter d’attention à l’aspect vibratoire. En effet, au
cours d’un cycle moteur, le ressort est comprimé et relâché grâce à la rotation de
la came. A certains régimes, des harmoniques de la loi de levée peuvent
apparaître et donner naissance à des vibrations entraînant l’affolement du ressort.
Une attention particulière est prêtée à l’harmonique 10, fréquence dangereuse
pour le ressort. Cette dernière doit être repoussée au-delà du régime de coupure
du moteur.
Ainsi mon projet de fin d’étude sera axé sur l’analyse vibratoire d’un ressort de
soupape et finira par le développement et l’amélioration du logiciel qui, au-delà
des contraintes, fournit des informations sur l’emplacement des harmoniques
dangereux. Le but étant de concevoir un ressort dont le comportement vibratoire
dangereux, s’il existe, doit avoir lieu au-delà du régime de coupure défini
préalablement par le client.

PROJET DE FIN D’ETUDES
Oussama SIMOU 11
GM5 EI
II. PFE effectués chez ISRI
1. Présentation
Six projets de fin d’étude de l’INSA de Strasbourg ont été réalisés à ISRI France
dans le cadre de la modélisation du comportement dynamique des ressorts de
soupape.
Le premier a été G. BEUVELET en 1996 qui a mis en place un programme de
calcul des contraintes dans le fil du ressort. Ce programme était réalisé sous Excel
5 et la résolution était réalisée grâce à Mathcad 6.
En 1997, J-S. GAUDILLIER a repris le travail de G. BEUVELET et a réalisé le
passage du programme sous Excel 97 tout en remaniant l’aspect graphique du
programme. La résolution étant toujours réalisée grâce à Mathcad 6. De plus, il a
étudié le phénomène de décollement de soupape et l’a intégré au programme. En
parallèle, M. SOARES a créé une base de données matériaux sous Access 97 qui
permet de choisir le matériau du ressort en fonction du fournisseur et ainsi
d’afficher les caractéristiques complètes du matériau choisi.
En 1998, L.Henry a à nouveau repris le travail de ses prédécesseurs et a
reprogrammé la résolution du programme en C++ au lieu de Mathcad. Ceci s’est
traduit par une augmentation très importante de la vitesse de résolution, passant
d’une durée de 20 minutes à quelques dizaines de secondes. M.HENRY a conclu
dans son PFE que les résultats obtenus par M. BEUVELET ne reflétaient pas la
réalité car l’éventualité du contact entre les spires n’a pas été étudiée.
Dix ans plus tard, M. FOUGEROUX a repris les travaux de M. HENRY afin d’en
améliorer les résultats. Pour ce faire, M.FOUGEROUX a effectué une nouvelle
modélisation du ressort qui tient compte des contacts entre les spires ainsi que la
rupture de contact entre came et soupape, soupape et siège, soupape et ressort,
et enfin ressort et culasse.
En 2009, M.FERRATON a amélioré le programme de simulation dynamique des
ressorts de soupape pour l’étendre sur différents types de ressorts (ressorts à pas
variables et ressorts coniques). Une amélioration de l’interface du programme a
été réalisée par M.FERRATON pour une rapide prise en main du programme.

PROJET DE FIN D’ETUDES
Oussama SIMOU 12
GM5 EI
2. Conclusion sur les travaux effectués
Les travaux effectués entre 1996 et 1998 sur l’étude du comportement dynamique
des ressorts n’étaient pas assez précis mais furent une base de travail pour M.
FOUGEROUX lors de son PFE pour obtenir un programme qui permet de mesurer
les contraintes dans les spires d’un ressort à pas constant. Il permet aussi de
visualiser les décollements éventuels de la soupape par rapport à l’arbre à cames.
Ce programme a été amélioré par M.FERRATON et permet de simuler des
ressorts à pas variables ainsi que des ressorts coniques.
Ce programme est un outil très important pour le développement de ces nouveaux
produits. Il permet de répondre aux clients de façon très rapide sur le
comportement dynamique du ressort et ce à différents régimes auxquels il sera
sollicité. Néanmoins, un problème persiste concernant l’emplacement des
harmoniques dangereux dans la plage de fonctionnement du moteur. En effet, il
existe des fréquences pour lesquels le ressort de soupape entre en résonance.
Chez les motoristes on parle souvent de l’harmonique 10 placé au régime moteur :
Avec f1 : première fréquence propre du ressort
3. Présentation du logiciel de calcul
Les PFE réalisés chez ISRI France ont permis l’élaboration d’un logiciel de calcul
dynamique permettant de prédire l’évolution des contraintes maximale et minimale
du ressort en fonction du régime moteur. Le programme est constitué de deux
classeurs Excel, un pour calculer les constantes relatives au ressort (raideur,
masses, contrainte maximale admissible…) et un deuxième classeur où ces
constantes sont intégrés manuellement pour effectuer le calcul dynamique.
Les formules correspondant aux minima TKP1et aux maxima TKP2 des
contraintes admises dans le fil du ressort au cours d’une levée de soupape
auxquelles on ajoute les contraintes dues aux efforts de précontrainte Tsat1.
1Tstatd
coef)xxmin(kD81TKP
3
1ii
1)max(8
23
1 Tstatd
coefxxkDTKP ii

PROJET DE FIN D’ETUDES
Oussama SIMOU 13
GM5 EI
Le résultat final est l’analyse de la courbe représentant les l’évolution des
contraintes maximales et minimales dans le fil du ressort (TKP1 et TKP2) en
fonction du régime moteur. Voici un exemple de graphique obtenu à la fin du
lancement d’un calcul dynamique Figure 4.
Figure 4 : Évolution des contraintes en fonction du régime
On remarque bien que l’évolution des contraintes maximales et minimales dans le
fil du ressort reste stable jusqu’à environ N= 5000 tr/min, régime après lequel le
ressort connait des variations de contraintes assez significative. Il s’avère grâce
aux calculs que l’emplacement de l’harmonique 10 serait juste aux alentours de
5000 tr/min.
Avec min(xi-xi-1) et max(xi-xi-1) dépendant directement de ω pulsation du moteur
Il faudrait donc intégrer un module complémentaire au logiciel de telle sorte à ce
que soient placés le régime de coupure défini par le constructeur ainsi que les
harmoniques dangereux. L’idéal serait d’avoir un comportement stable jusqu’au
régime de coupure et que les harmoniques dangereux se placent au-delà de ce
dernier.
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1000 2000 3000 4000 5000 6000 7000
Co
ntr
ain
tes
en
MP
a
Régime moteur en Tr/min
Courbes de contraintes dynamiques
TKP1 en Mpa
TKP2 en Mpa

PROJET DE FIN D’ETUDES
Oussama SIMOU 14
GM5 EI
III. Positionnement de mon projet par rapport aux précédents
Mon projet de fin d’étude s’inscrit parfaitement dans une logique de continuité par
rapport aux projets qui ont été réalisés auparavant chez ISRI. En effet, en partie
tout comme M.FERRATON, il s’agit d’améliorer le programme utilisé de telle sorte
à ce que l’aspect vibratoire soit intégré au logiciel. Le calcul dynamique étant
effectué, viennent s’ajouter des droites représentant l’emplacement des
harmoniques dangereux sur l’axe du régime moteur.
En parallèle, une étude sur l’influence des éléments de distribution a été réalisée
dans le but de voir si ces derniers ont une influence directe sur le comportement
vibratoire et dynamique du ressort.
Enfin une série de simulation et d’essais sera réalisée à travers un type de ressort
de soupape afin visualiser à la fois son comportement dynamique et vibratoire.
IV. Objectifs et démarche
1. Objectifs
Le projet de fin d’étude intitulé : « Analyse vibratoire d’un ressort de soupape »
aura comme objectif de :
Établir une analyse fonctionnelle traitant de l’influence des éléments extérieurs sur le comportement vibratoire du ressort
Calculer les fréquences propres du ressort et les intégrer directement au logiciel de calcul
Voir s’il existe un lien entre l’emplacement des harmoniques dangereux et les pics de contraintes dans le fil du ressort
Optimiser la conception du ressort en améliorant le logiciel de calcul.

PROJET DE FIN D’ETUDES
Oussama SIMOU 15
GM5 EI
2. Démarche
Les objectifs étant bien définis, le projet sera subdivisé en plusieurs parties dont
j’exposerai ici l’essentiel de chacune d’entre elles.
Tout d’abord, une analyse fonctionnelle sera réalisée dans le but de situer le
problème. En effet, dans cette partie, la chaîne de distribution sera mise en
évidence dans son intégralité afin de voir l’influence de chacun de ses éléments
sur le comportement dynamique et vibratoire du ressort de soupape. Une attention
particulière sera en revanche dédiée au ressort (notre système d’étude) afin d’en
tirer les conclusions sur son aspect vibratoire (Assimilation ressort-barreau,
discrétisation du ressort,…).
S’en suivront des expérimentations effectuées sur un ressort (Moteur DV€6,
développé chez ISRI France) d’une part pour voir l’influence de la masse de tout
le système sur la réponse fréquentielle du ressort. Une étude sur le détarage de
15% du ressort sera réalisée pour voir si grâce à cette méthode, l’optimisation de
son comportement est validée. Enfin une proposition sur l’amélioration du logiciel
de calcul sera présentée afin de voir sur quels paramètres il faut agir de manière à
avoir un comportement satisfaisant.
L’amélioration du logiciel sera illustrée par la conception d’un ressort « amélioré ».
Enfin, grâce aux résultats obtenus, une conclusion sera tirée quant aux éléments
influençant le comportement normal du ressort ainsi qu’au choix de la méthode à
entreprendre pour éviter tout affolement du ressort dans la plage de
fonctionnement du moteur.

PROJET DE FIN D’ETUDES
Oussama SIMOU 16
GM5 EI
CONCEPTS NOUVEAUX
I. Analyse fonctionnelle
1. Validation du besoin fondamental
Lors d’une analyse fonctionnelle, il est indispensable d’effectuer toute démarche
de réflexion sans commencer par définir clairement le besoin.
Le système d’étude est le ressort de soupape. Il s’agit de définir son contexte
général dans une démarche projet.
En effet les questions que l’on devrait se poser sont :
A qui, le système étudié, rend-il service ? Sur quoi, le système étudié, agit-il ? Dans quel but existe le système étudié ?
Figure 5 : Bête à cornes : Système d'étude (ressort de soupape)

PROJET DE FIN D’ETUDES
Oussama SIMOU 17
GM5 EI
2. Diagramme pieuvre
Le diagramme pieuvre est un outil d’analyse fonctionnelle qui permet de définir les
liens (c'est-à-dire les fonctions de service) entre le système et son environnement.
Ce diagramme permet de recenser la plupart des fonctions du système.
Dans le cadre de ce projet, le système étudié est le ressort de soupape dans un
contexte vibratoire. De ce fait, tous les paramètres ayant un lien avec le système
doivent être intégrés au diagramme.
Ces paramètre peuvent avoir un lien direct avec le système, auquel cas ils en
seront liés par une fonction de contrainte. On définit aussi une ou des fonctions
principales dans le diagramme. Ces fonctions représentent les paramètres
essentiels agissant sur le système, ayant ou non un lien avec d’autres.
Ainsi un modèle de diagramme pieuvre concernant le projet étudié peut être
représenté comme suit : Figure 6
Figure 6 : Diagramme pieuvre "système ressort de soupape"

PROJET DE FIN D’ETUDES
Oussama SIMOU 18
GM5 EI
3. Fonctions principales et fonctions contraintes
Après avoir représenté le diagramme pieuvre de notre système, nous allons définir
les fonctions principales ainsi que les fonctions de contraintes.
Le détail des fonctions est représenté dans le Tableau 1
FP1 Trouver à quel régime moteur le comportement ressort peut être perturbé par la présence d’harmonique dangereuse
FP2 Voir s’il existe un lien entre l’emplacement des harmoniques dangereuses et les contraintes dans le ressort
FC1 Tenir compte de l’environnement de fonctionnement du ressort : huile, …
FC2 Tenir compte de l’influence des éléments de distribution
FC3 Tenir compte du vieillissement du ressort
FC4 Respecter le cahier des charges du client
FC5 Intégrer les conditions dans lesquelles travaille le ressort : pression, température, …
FC6 Tenir compte uniquement des vibrations longitudinales
Tableau 1 : Définition des fonctions principales et des fonctions contraintes
PROJET DE FIN D’ETUDES
Oussama SIMOU 19
GM5 EI
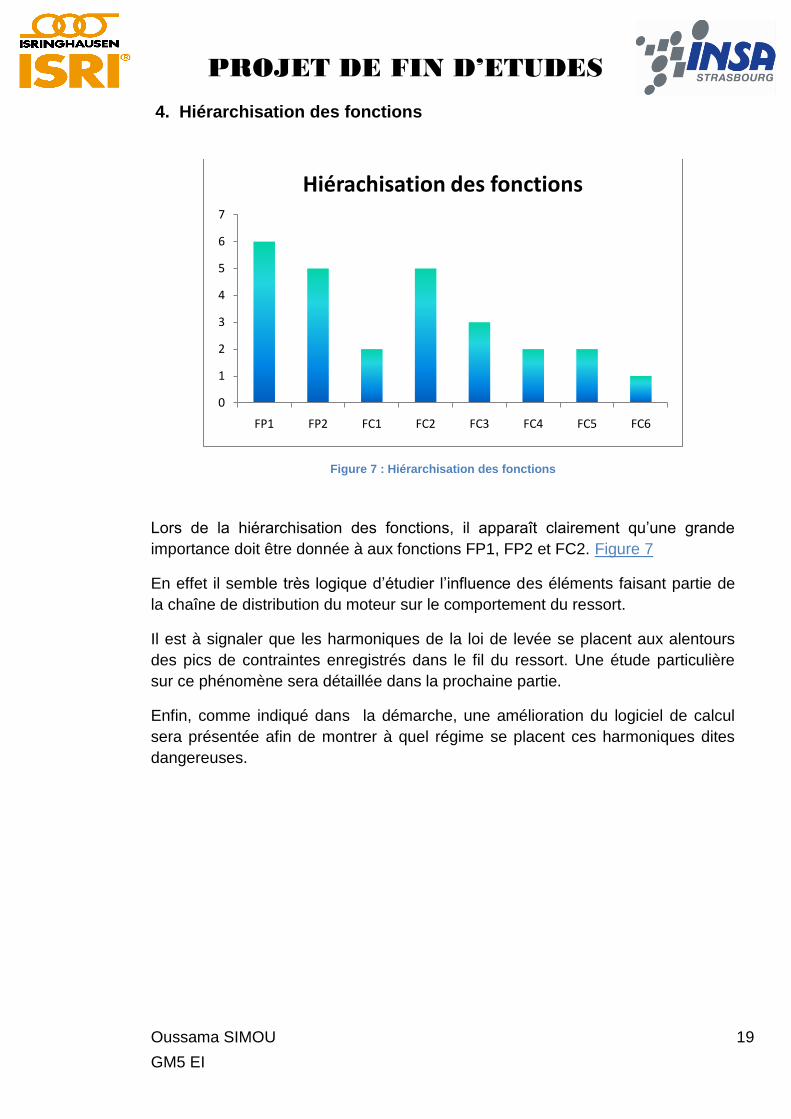
4. Hiérarchisation des fonctions
Figure 7 : Hiérarchisation des fonctions
Lors de la hiérarchisation des fonctions, il apparaît clairement qu’une grande
importance doit être donnée à aux fonctions FP1, FP2 et FC2. Figure 7
En effet il semble très logique d’étudier l’influence des éléments faisant partie de
la chaîne de distribution du moteur sur le comportement du ressort.
Il est à signaler que les harmoniques de la loi de levée se placent aux alentours
des pics de contraintes enregistrés dans le fil du ressort. Une étude particulière
sur ce phénomène sera détaillée dans la prochaine partie.
Enfin, comme indiqué dans la démarche, une amélioration du logiciel de calcul
sera présentée afin de montrer à quel régime se placent ces harmoniques dites
dangereuses.
0
1
2
3
4
5
6
7
FP1 FP2 FC1 FC2 FC3 FC4 FC5 FC6
Hiérachisation des fonctions

PROJET DE FIN D’ETUDES
Oussama SIMOU 20
GM5 EI
II. La distribution et ses composants
1. La distribution
La distribution Figure 8 regroupe l’ensemble des organes qui permettent la mise
en communication du cylindre avec le milieu extérieur lors des phases d’admission
et d’échappement (opérations de transvasement) tout en maintenant l’étanchéité
du cylindre. Sa fonction est de définir la loi d’évolution de la section de la section
de passage des gaz brûlés et des gaz frais en fonction de l’angle de rotation du
vilebrequin. La distribution a une influence importante sur les performances et le
niveau de pollution du moteur et elle est, de nos jours, conçue en fonction de ces
deux contraintes. La distribution subit des sollicitations importantes, tant
thermiques (contact avec la chambre de combustion), que mécaniques (inertie
importante de tous ses composants).Le système de distribution qui équipe
actuellement tous moteurs alternatifs à pistons quatre temps est celui des
soupapes actionnées par arbre à cames. La quasi-totalité des moteurs actuels
emploient des arbres à cames en tête, c’est-à-dire positionnés au sommet de la
culasse entraînant directement les soupapes à l’aide d’actionneurs.
Afin de répondre aux normes anti-pollution plus sévères, une optimisation de la
combustion ainsi que du rendement du moteur sont cherchées. Ces optimisations
passent par une amélioration de la distribution.
Pour les moteurs alternatifs à pistons 4 temps, la distribution à soupapes est
aujourd’hui le seul système utilisé car il réunit les avantages suivants :
Étanchéité de la chambre de combustion Possibilité d’obtenir des puissances spécifiques élevées Fiabilité maîtrisée
Figure 8 : Distribution à soupape en tête à attaque directe

PROJET DE FIN D’ETUDES
Oussama SIMOU 21
GM5 EI
2. Composants de la distribution
a. La soupape
La soupape Figure 9 est l’élément de la distribution dont il est nécessaire de
contrôler le déplacement de façon précise, puisque c’est elle qui régit les
échanges gazeux entre la chambre de combustion et l’atmosphère. La soupape
se compose de deux parties : la tête et la tige
La tête est l’élément qui permet d’obturer le passage des gaz et qui est au contact
de la chambre de combustion. Elle repose sur le siège : pièce spécifique insérée
dans la culasse (en aluminium) pour résister aux contacts intermittents. Le contact
de la tête de soupape avec le siège permet également de refroidir la soupape par
conduction thermique. La surface de la soupape en contact avec le siège est
appelée la portée.
La queue de la soupape est raccordée à la tête par un congé de grand rayon en
forme de tulipe. La queue est une tige cylindrique qui coulisse dans le guide (en
laiton ou en acier fritté). Ce dernier est serti dans la culasse et permet de refroidir
la soupape.
Figure 9 : Soupape moteur
Les critères à prendre en compte lors du dimensionnement des soupapes sont la
perméabilité, la conduction thermique, la résistance mécanique et la masse.
En effet, la soupape est un élément de la distribution assez lourd (comparé au
ressort) et donc dispose d’une inertie assez importante. Une soupape d’une

PROJET DE FIN D’ETUDES
Oussama SIMOU 22
GM5 EI
masse importante peut provoquer un dysfonctionnement au niveau de l’admission.
C’est-à-dire que la soupape ne dispose plus d’une cinématique correcte et ne suit
plus correctement la levée imposée par la came. On assiste donc à deux
phénomènes dangereux pour le fonctionnement du moteur : Le décollement de la
soupape de son actionneur et le rebond sur son siège Figure 10
Un décollement de la soupape créera à son tour un dysfonctionnement au niveau
du comportement dynamique du ressort provoquant éventuellement une rupture
de ce dernier. Dans ces conditions, la soupape n’est plus rappelée et peut heurter
la surface supérieure du piston.
Figure 10 : Différence entre la loi de levée et le trajet de la came: Décollement et rebond

PROJET DE FIN D’ETUDES
Oussama SIMOU 23
GM5 EI
b. L’actionneur
Concernant l’architecture des systèmes de commande de la distribution, trois
solutions usuelles sont utilisées :
Distribution à attaque directe, avec la commande directe de la soupape par la came via un poussoir
Distribution à linguet, ou basculeur, avec l’utilisation d’un composant intermédiaire ayant un mouvement oscillant.
Distribution culbutée, avec la commande du basculeur par l’intermédiaire d’une tige et d’un poussoir supplémentaire.
Distribution à attaque directe
L’actionneur utilisé pour ce type de distribution est le poussoir. Ce dernier offre la
meilleure rigidité, même si sa raideur varie selon l’excentration du point de contact
avec la came. Le poussoir est guidé par la culasse Figure 11. Son plateau
supérieur possède un revêtement permettant de diminuer le frottement du au
contact avec la came. Cela permet de ne plus faire de réglage de jeu au cours de
la vie du moteur.
La butée hydraulique est incluse dans le poussoir. Il s’agit d’un dispositif de
rattrapage hydraulique des jeux permettant de limiter l’évolution dynamique de la
distribution au cours du temps, l’absence de jeux permet également de réduire le
bruit de la commande de soupape.
Le poussoir étant solidaire de la soupape, il est ainsi soumis aux contraintes
cinématiques que cette dernière. En effet une cinématique disproportionnée de la
soupape entraînera systématiquement un dysfonctionnement du poussoir causant
une rupture de contact entre ce dernier et la came. Un décollement provoquera
ainsi un choc entre la came et le poussoir. La surface sera ainsi détériorée.

PROJET DE FIN D’ETUDES
Oussama SIMOU 24
GM5 EI
Figure 11 : Distribution à attaque directe: Le poussoir

PROJET DE FIN D’ETUDES
Oussama SIMOU 25
GM5 EI
Distribution à linguet
Le mouvement du linguet est défini par :
- une rotation à l’une de ses extrémités, présentant éventuellement une butée hydraulique.
- Le contact avec la came. Le linguet peut posséder soit un roulement à billes afin de diminuer les frottements, soit un simple patin pour réduire la masse.
- Le contact de la soupape à l’autre extrémité du linguet.
Le linguet est conçu pour avoir une faible masse mobile. Il permet une
implantation des arbres à cames moins contraignante par rapport à une
distribution à poussoir. En revanche, l’usinage de la came est plus délicat car elle
contient des concavités
Figure 12 : Distribution à linguet

PROJET DE FIN D’ETUDES
Oussama SIMOU 26
GM5 EI
Distribution culbutée
Contrairement au linguet, son axe de rotation se trouve au centre Figure 13, les
deux extrémités étant en contact avec la came et la soupape. Pour des raisons
géométriques, le culbuteur est l’actionneur qui offre la rigidité la plus faible et la
masse mobile la plus importante. L’axe de rotation est généralement une rampe
permettant la lubrification de l’axe de rotation. Le culbuteur permet de n’utiliser
qu’un seul arbre à cames pour actionner les soupapes d’admission et
d’échappement. Le culbuteur « fourche », possédant deux bras côté soupapes,
permet même, sur une culasse multisoupapes, d’actionner deux soupapes en
même temps.
Ces deux derniers types d’actionneur sont également appelés de façon générique
basculeurs. Les équations cinématiques permettant de définir leur mouvement
sont identiques. Le rapport de culbuterie, rapport entre la distance (centre de
rotation du basculeur / point de contact avec la soupape-basculeur) et la distance
(centre de rotation du basculeur / point de contact came-basculeur), varie au cours
de la levée de soupape, et peut ainsi modifier la raideur entre la came et la
soupape.
Les problèmes de décollement sont aussi valables pour les basculeurs et peuvent
générer des problèmes de rupture du ressort de soupape.
Figure 13 : Distribution culbutée
PROJET DE FIN D’ETUDES
Oussama SIMOU 27
GM5 EI
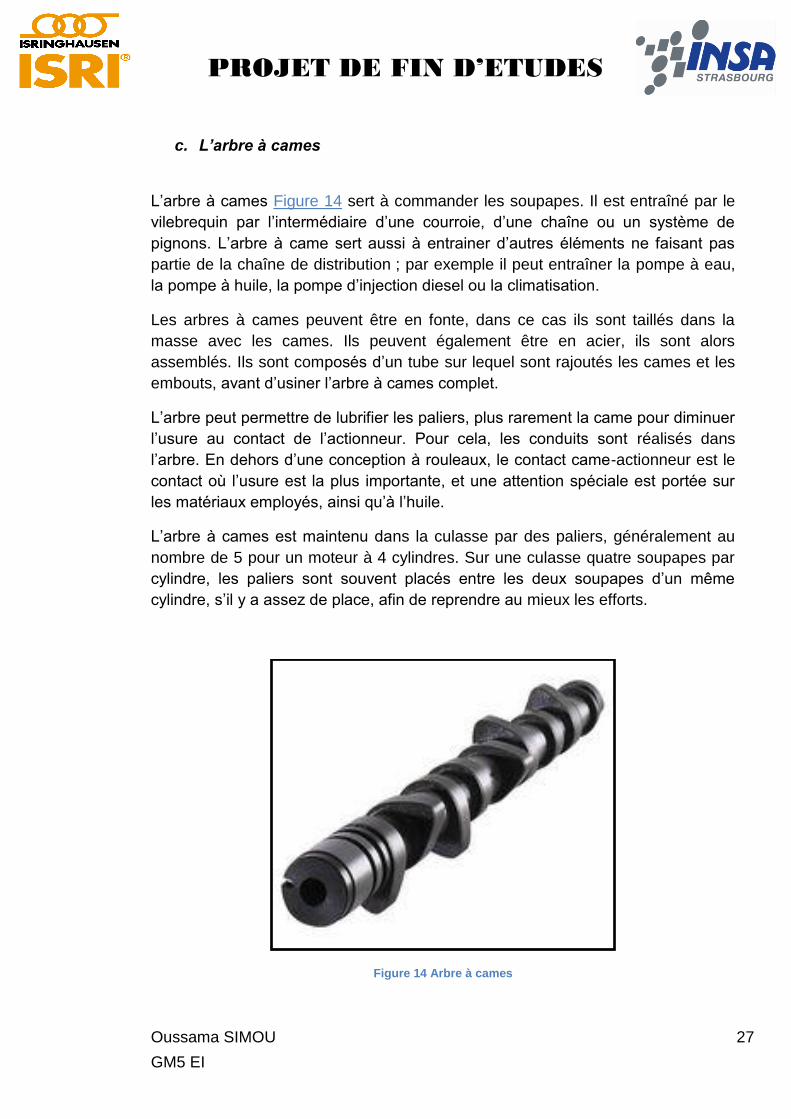
c. L’arbre à cames
L’arbre à cames Figure 14 sert à commander les soupapes. Il est entraîné par le
vilebrequin par l’intermédiaire d’une courroie, d’une chaîne ou un système de
pignons. L’arbre à came sert aussi à entrainer d’autres éléments ne faisant pas
partie de la chaîne de distribution ; par exemple il peut entraîner la pompe à eau,
la pompe à huile, la pompe d’injection diesel ou la climatisation.
Les arbres à cames peuvent être en fonte, dans ce cas ils sont taillés dans la
masse avec les cames. Ils peuvent également être en acier, ils sont alors
assemblés. Ils sont composés d’un tube sur lequel sont rajoutés les cames et les
embouts, avant d’usiner l’arbre à cames complet.
L’arbre peut permettre de lubrifier les paliers, plus rarement la came pour diminuer
l’usure au contact de l’actionneur. Pour cela, les conduits sont réalisés dans
l’arbre. En dehors d’une conception à rouleaux, le contact came-actionneur est le
contact où l’usure est la plus importante, et une attention spéciale est portée sur
les matériaux employés, ainsi qu’à l’huile.
L’arbre à cames est maintenu dans la culasse par des paliers, généralement au
nombre de 5 pour un moteur à 4 cylindres. Sur une culasse quatre soupapes par
cylindre, les paliers sont souvent placés entre les deux soupapes d’un même
cylindre, s’il y a assez de place, afin de reprendre au mieux les efforts.
Figure 14 Arbre à cames

PROJET DE FIN D’ETUDES
Oussama SIMOU 28
GM5 EI
Loi de levée
La forme de la came s’appelle « loi de levée ». La loi de levée est déterminée pour
assurer un remplissage optimal du moteur en fonction des performances
souhaitées. Cela joue un rôle fondamental dans la dynamique du moteur. La levée
maximale de la soupape ainsi que l’étalement de la levée sont tout d’abord
imposés par les conditions de remplissage du moteur. La loi qui serait parfaite
pour le remplissage du moteur serait une loi rectangulaire Figure 15, uniquement
définie par l’étalement et la levée maximale. Une telle loi n’est cependant pas
mécaniquement réalisable (accélération et vitesse infinies).
La loi de levée Figure 16 doit donc être le meilleur compromis entre le remplissage
et la tenue mécanique, sur la plage de régime définie.
Figure 15 : Loi de levée parfaite
Figure 16 : Définition d'une loi de levée

PROJET DE FIN D’ETUDES
Oussama SIMOU 29
GM5 EI
d. Le ressort de soupape
Le ressort de soupape assure le contact entre les différents éléments pendant la
phase d’accélération négative, limite les rebonds à la fermeture et maintient la
soupape sur son siège pendant le cycle basse pression. Il a aussi pour rôle de
maintenir la soupape en contact avec l’actionneur. La soupape y est rattachée par
l’intermédiaire d’une coupelle. Deux clavettes (ou demi-lunes) permettent de fixer
la coupelle à la soupape Figure 17. Le ressort de soupape est de type hélicoïdal,
et les deux spires extrêmes sont rapprochées et meulées, afin que l’appui du
ressort sur la culasse ou la coupelle soit d’une surface importante. Ces deux
spires sont qualifiées de spires mortes car elles servent uniquement pour les
appuis, les autres spires sont dites actives car ce sont elles qui créent les efforts.
Les ressorts de soupapes sont généralement préchargés. Cette précharge doit
être suffisante pour éviter que les contre-pressions dans les conduits ne
provoquent la réouverture de la soupape quand elle est fermée, et assurer que la
soupape ne décolle pas de l’actionneur sous l’effet de son inertie à haut régime.
Le ressort sert aussi à faire tourner la soupape sur son axe grâce au couple
généré par son écrasement alternatif, nettoyant ainsi la portée de la soupape sur
le siège et répartissant uniformément l’usure.
La raideur du ressort est nettement plus faible que celles des autres composants
et compromet souvent la dynamique de la commande de soupape. Pour résoudre
ce problème, une alternative au ressort est d’utiliser un deuxième culbuteur, ou
bien un système de rappel pneumatique (moteur de Formule 1). Ces systèmes
desmodromiques assurent une bien meilleure rigidité mais sont trop coûteux pour
être appliqués en grande série.
Figure 17 : Mise en place du ressort de soupape

PROJET DE FIN D’ETUDES
Oussama SIMOU 30
GM5 EI
3. Influence des éléments de distribution
Tout d’abord, Un cahier des charges (cf. Annexes) comprenant une liste
exhaustive sur l’étude de l’influence des éléments de distribution sur le
comportement vibratoire du ressort a été soumis à un motoriste. A ce jour, ISRI
n’a toujours pas reçu d’éléments de réponse à cette étude.
C’est la raison pour laquelle, dans cette partie, la plus grande importance sera
accordée à la fois à la loi de levée ainsi qu’au ressort lui-même.
a. Masses et inerties
De façon générale, les inerties sont néfastes au bon fonctionnement d’une
distribution car elles entraînent un accroissement du chargement qui
s’accompagne d’une augmentation des pertes par frottements, de l’usure des
contacts, de l’amplitude des déformations dynamiques et des contraintes
alternées dans les différentes pièces.
Pour améliorer la conception de certains éléments et supprimer la masse inutile,
une étude de la répartition des contraintes par éléments finis permettant au mieux
d’utiliser la matière est parfois indispensable lorsque la géométrie ou le
chargement sont complexes.
b. Raideur
La raideur des composants fortement sollicités (les linguets ou les basculeurs et
leurs rampes, les tiges de culbuteur, etc.) est un paramètre important en ce qui
concerne le comportement dynamique et notamment l’écart entre la levée réelle
en fonctionnement et la loi de levée théorique. Il est donc souhaitable de chercher
à obtenir la raideur maximale sans toutefois pénaliser les masses en mouvement.
L’utilisation combinée du calcul par éléments finis et de la modélisation numérique
du comportement dynamique permet d’effectuer des études paramétriques
conduisant à la définition du meilleur compromis entre l’augmentation des raideurs
et la diminution des masses en mouvement

PROJET DE FIN D’ETUDES
Oussama SIMOU 31
GM5 EI
c. Loi de levée
Problèmes générés par la dynamique
La loi de levée est principalement ce qui va créer l’excitation de la commande de
soupape. La cinématique définie ne peut pas être respectée exactement. En effet,
la cinétique des pièces augmente avec le régime et contribue à déstabiliser la
distribution. Ceci ajouté à l’influence de la raideur des différents composants va
inévitablement perturber la levée cinématique définie. On remarque que la loi de
levée est de moins en moins respectée plus le régime moteur augmente Figure 18
Figure 18 : Levée et vitesse de la loi échappement (comparaison 1000 et 7000 tr/min)
Afin de vérifier l’impact réel de ce phénomène, la culasse est testée seule et
l’arbre à came est directement entraîné par un moteur électrique. Les mesures
effectuées sont généralement : la levée, la vitesse, les efforts sous le ressort et la
déformation de l’actionneur. Ces mesures permettent de vérifier que les pertes de
contact ne sont pas trop importantes, et qu’elles se produisent à un régime
supérieur au régime de coupure du moteur. L’écart entre le déplacement de la
soupape et la levée cinématique ne doit pas dépasser un certain seuil. Le régime
d’affolement de la distribution est le régime moteur auquel ce seuil est atteint.

PROJET DE FIN D’ETUDES
Oussama SIMOU 32
GM5 EI
Analyse harmonique : Harmoniques de la loi
Durant le cycle de fonctionnement, l’une des extrémités du ressort est fixe, en
appui sur la culasse, tandis que l’autre suit le mouvement de la soupape Figure
17. La première spire du ressort subit donc les lois de déplacement et
d’accélération de la soupape. Cette sollicitation se propage le long du fil, se
réfléchit à l’autre extrémité fixe et parcourt à nouveau le ressort dans le sens
inverse. Cette excitation est entretenue par la rotation de la came et peut donner
naissance à certains régimes, à des ondes stationnaires.
Compte tenu du caractère périodique de la sollicitation, la loi de levée de soupape
peut être décomposée en série de Fourier selon la relation :
Avec et sont respectivement l’amplitude et la phase de l’harmonique de
rang n
est la vitesse de rotation de l’arbre à cames [rad/s]
est la levée moyenne de la soupape.
La plage de fonctionnement d’un moteur utilisant des ressorts de soupape
dépasse rarement 10000 tr/min, or la fréquence propre d’un ressort de soupape
se situe autour de 50000 tr/min. Cependant les harmoniques de la loi de levée
peuvent se révéler dangereuses pour le bon fonctionnement du moteur, il est donc
nécessaire de savoir à quel régime sera sollicité le ressort par l’harmonique de
rang n. Ceci est donné par la formule suivante :
Avec la première fréquence propre du ressort
n le rang de l’harmonique de la loi de levée
le régime moteur où apparaît l’harmonique de rang n (régime critique)
Démonstration :
Le rand de l’harmonique est pris comme un critère de sécurité pour le bon
fonctionnement du moteur.

PROJET DE FIN D’ETUDES
Oussama SIMOU 33
GM5 EI
On sait que
Donc
Comme l’apparition de l’harmonique n dépend de la fréquence propre du ressort
Alors on introduisant la sécurité, on trouve
Les motoristes pointent du doigt l’harmonique 10 (notée H10) comme étant
l’harmonique le plus souvent dangereux pour le bon fonctionnement du moteur.
Certains même définissent leur régime de coupure en fonction de cet harmonique.
Ainsi le but de notre étude est de faire en sorte à ce que les ressorts conçus aient
une première fréquence propre qui, grâce à la formule précédente, donne un
régime critique qui soit au-delà du régime de coupure défini par le motoriste.
Pour cela une attention particulière sera dédiée au ressort de soupape. En effet, le
calcul de sa fréquence propre se fera par deux méthodes théoriques : Assimilation
ressort-barreau cylindrique et la discrétisation du ressort.

PROJET DE FIN D’ETUDES
Oussama SIMOU 34
GM5 EI
4. Le ressort de soupape
Dans cette partie, le calcul de la première fréquence propre sera l’élément clé de
notre étude. Deux méthodes seront exposées afin de déterminer la première
fréquence propre du ressort :
Assimilation Ressort-Barreau cylindrique Discrétisation du ressort
a. Assimilation ressort – barreau cylindrique
Assimilons le ressort de longueur l, de diamètre moyen D et de raideur k à un
barreau cylindrique de mêmes caractéristiques Figure 19. Cette assimilation n’est
en aucun cas une exagération dans le sens où elle facilite le calcul mais elle
repose sur des études qui vérifient son exactitude.
Figure 19 : Assimilation ressort - barreau cylindrique
Nous supposerons que le ressort et le barreau ont le même comportement
dynamique. Considérons une section A d’abscisse x.
Lorsqu’un ébranlement parcourt longitudinalement le barreau, le déplacement de
cette section est λ, fonction de x et du temps t.
L’équation traduisant la loi du mouvement de la section A est :

PROJET DE FIN D’ETUDES
Oussama SIMOU 35
GM5 EI
E [Pa] : module d’élasticité longitudinal du barreau
ρ [kg/m3] : masse volumique du barreau
Rq : Le rapport
est égal au carré de la célérité de l’onde dans ce milieu
homogène.
Calcul de la célérité de l’onde :
Comme défini précédemment à l’aide de l’équation traduisant la loi du mouvement
de la section A, on a :
G [Pa] : Module d’élasticité transversal du fil du ressort
CL [m/s] : célérité de l’onde dans le milieu élastique.
En combinant les relations liant la masse du ressort ainsi que sa raideur, on
trouve :
Rq : Donc le temps pour que l’onde parcourt la distance l du ressort est :
Solution de l’équation de mouvement :
Dans cette partie nous allons séparer les variables x et t
Hypothèse : On suppose que la solution est sous la forme de
En reportant cette solution dans l’équation aux dérivées partielles, on obtient :
Ainsi

PROJET DE FIN D’ETUDES
Oussama SIMOU 36
GM5 EI
Afin d’obtenir deux équations différentielles du second ordre à coefficient constant
dont les solutions traduisent le phénomène oscillatoire du système étudié, on pose
comme hypothèse :
Avec n : nombre entier
ω: pulsation du système
On peut donc écrire :
La solution particulière de l’équation aux dérivées partielles obtenue à partir
des fonctions X(t) et T(t) peut s’écrire sous la forme :
φi étant le déphasage à la pulsation (iω)
Application au ressort de soupape :
Figure 20 : Disposition du ressort dans ses conditions de fonctionnement
Considérons le ressort en position de levée moyenne, de longueur l2 définie
comme le montre la figure.
Les constantes de la solution particulière de l’équation aux dérivées partielles sont
déterminées à partir des conditions aux limites suivantes :

PROJET DE FIN D’ETUDES
Oussama SIMOU 37
GM5 EI
Avec Kn : l’amplitude de rang n
nΩ : pulsation de l’harmonique de rang n de l’excitation périodique,
n : déphasage de l’harmonique de rang n
o La première condition se traduit par :
Ainsi
La deuxième condition, compte tenu des résultats, s’écrit :
Avec
Ainsi
La solution particulière de l’équation aux dérivées partielles est la somme des
solutions trouvées pour chaque harmonique d’excitation soit :

PROJET DE FIN D’ETUDES
Oussama SIMOU 38
GM5 EI
Fréquence propre du ressort
D’après cette équation, on peut dire qu’il y a résonance ssi :
Avec nΩ : la pulsation de l’harmonique de rang n de l’excitation.
Les pulsations propres du ressort sont donc :
La pulsation du premier mode est donc égale à
Et on a
D’où la fréquence du premier mode (fondamentale) est donc :
Ainsi les fréquences propres du ressort dépendent uniquement de la raideur et de
la masse équivalente.

PROJET DE FIN D’ETUDES
Oussama SIMOU 39
GM5 EI
b. Discrétisation du ressort
Le fil du ressort, milieu continu homogène est modélisé par une suite de masses
séparées par des éléments élastiques. La matière étant uniformément répartie, les
n masses constituant le modèle équivalent seront égales et séparées par des
ressorts sans masse sauf pour les extrémités car les spires sont jointives et
meulées.
Figure 21 : Discrétisation du ressort de soupape
Le modèle représenté ci-dessus aura exactement la même masse et la même
raideur que celles du ressort réel :
Avec Mt : Masse totale du ressort
m0 : Masse liée au repère fixe (spire meulée et jointive)
n : Nombre de masses mobiles

PROJET DE FIN D’ETUDES
Oussama SIMOU 40
GM5 EI
Recherche des fréquences propres
Les équations du mouvement de chaque masse, établies à partir des équations de
Lagrange constituent un système différentiel d’ordre 2 à coefficients constants
sans second membre qui s’écrit sous la forme suivante :
Ce système de n équations à n inconnues peut se mettre sous la
forme matricielle suivante :
L’écriture matricielle du système différentiel est alors :
Avec respectivement les matrices colonnes d’ordre n
d’accélération et de déplacement des spires dont les éléments sont
respectivement et .
La solution de ce système différentiel est de la forme :
dont les éléments de la matrice et sont des constantes qui dépendent des
conditions initiales. Les valeurs de , pulsations propres du système, sont les
racines carrées des valeurs propres de la matrice.
L’intégration de ces matrices sous un logiciel de calcul (type MATLAB ou MAPLE)
fournit des éléments de réponses quant aux fréquences propres du système. En
annexes, une étude détaillée sur le calcul des fréquences propres d’un ressort de
soupape développé chez ISRI a été réalisée sous MAPLE.

PROJET DE FIN D’ETUDES
Oussama SIMOU 41
GM5 EI
c. Corrélation contraintes et harmonique
Grâce au logiciel de calcul dynamique, une attention particulière a été accordée
au placement des pics de contraintes dans le fil du ressort lors l’évolution du
régime moteur. En effet, on remarque le positionnement des harmoniques
dangereux aux alentours des pics de contraintes. Comment peut-on expliquer ce
phénomène?
Figure 22 : Placement des harmoniques dangereux par rapport aux pics de contraintes
Comme expliqué précédemment, lors du cycle de fonctionnement d’un moteur, la
première spire subit exactement la loi de déplacement et d’accélération de la
soupape. L’onde créée par cette sollicitation périodique (imposée par la loi de
levée) parcourt le fil du ressort et réfléchit à son autre extrémité créant ainsi une
onde stationnaire. La loi de levée est décomposée en série de Fourier sous la
forme :
Grâce au calcul développé dans la partie « Assimilation ressort-barreau
cylindrique », nous pouvons écrire la formule suivante

PROJET DE FIN D’ETUDES
Oussama SIMOU 42
GM5 EI
La résultante des efforts de réaction du ressort face à la sollicitation qui lui est
imposée par la loi de came s’écrit :
Où Fn est l’amplitude de l’harmonique n dont l’expression peut se mettre sous la
forme :
Sachant que la contrainte n’est qu’une force à une constante près (section, si bien
évidemment cette dernière est constante), nous pouvons affirmer que l’expression
de la contrainte dans le fil du ressort sera de la forme
Avec
S : section du fil
Ainsi, nous remarquons que la formule (1) est très intéressante pour
répondre à notre question car on voit bien qu’à ω=ω1 la contrainte prend des
valeurs infinies. Ceci est un raisonnement mathématique, car d’un point de vue
physique, il est impossible d’avoir des contraintes infinies.
Conclusion
Cette démarche nous montre bien qu’en excitant le ressort à une pulsation
correspondant à une de ses pulsations propres, l’amplitude de l’effort du ressort
(de la contrainte aussi) prend des valeurs importantes. Ceci explique très
clairement le fait que les pics de contraintes coïncident avec les pulsations
propres du ressort qui elles-mêmes coïncident avec les harmoniques de la loi de
levée.
PROJET DE FIN D’ETUDES
Oussama SIMOU 43
GM5 EI
EXPERIMENTATIONS ET RESULTATS
I. Influence des masses mises en mouvement
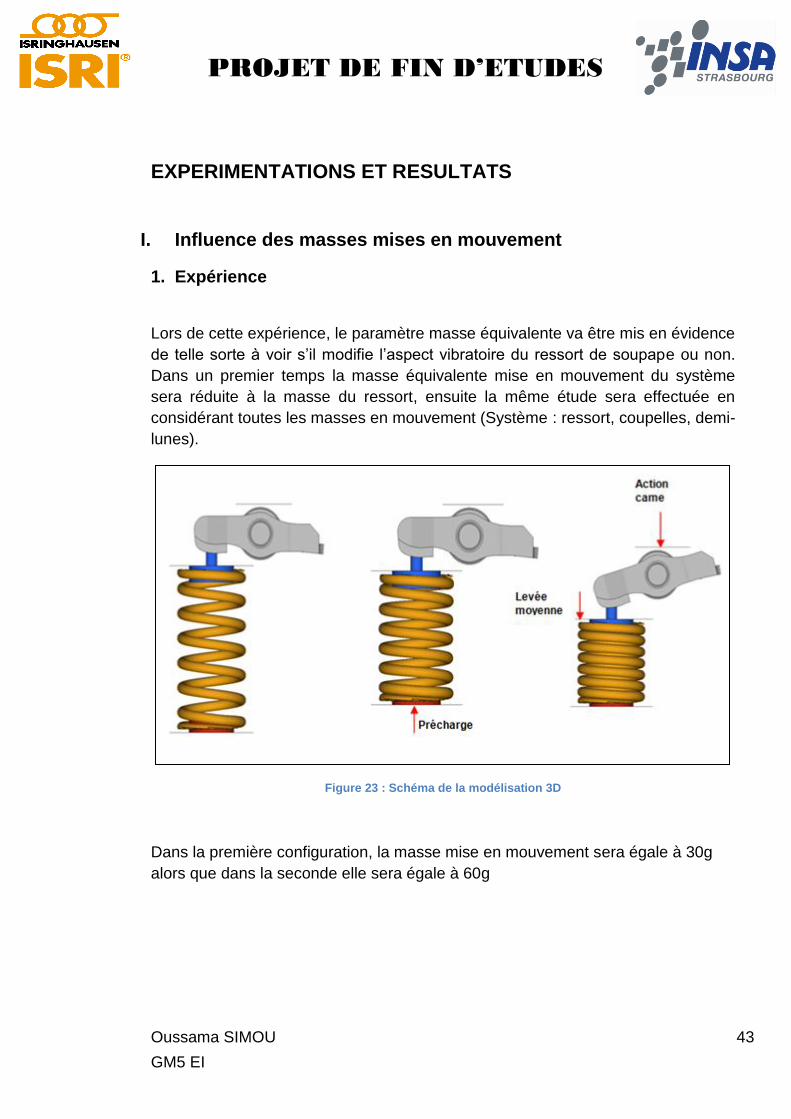
1. Expérience
Lors de cette expérience, le paramètre masse équivalente va être mis en évidence
de telle sorte à voir s’il modifie l’aspect vibratoire du ressort de soupape ou non.
Dans un premier temps la masse équivalente mise en mouvement du système
sera réduite à la masse du ressort, ensuite la même étude sera effectuée en
considérant toutes les masses en mouvement (Système : ressort, coupelles, demi-
lunes).
Figure 23 : Schéma de la modélisation 3D
Dans la première configuration, la masse mise en mouvement sera égale à 30g
alors que dans la seconde elle sera égale à 60g

PROJET DE FIN D’ETUDES
Oussama SIMOU 44
GM5 EI
2. Résultats
Après avoir lancé une analyse par éléments finis, les résultats semblent confirmer
l’absence de différence tant sur le plan dynamique (efforts et contraintes dans le
ressort) que sur le plan vibratoire (vibrations de la spire moyenne).
On se place à un régime de 3000 tr/min pour cet exemple et voici deux tableaux
comparant les deux configurations :
Comparaison des efforts
Figure 24 : Différences des efforts dues au changement de masse
Comparaison des amplitudes de vibrations de la spire moyenne
Figure 25 : Différence des amplitudes de vibrations de la spire moyenne d'un ressort

PROJET DE FIN D’ETUDES
Oussama SIMOU 45
GM5 EI
3. Conclusion
Lors de la simulation par éléments finis de l’influence de la masse mise en
mouvement sur le comportement dynamique et fréquentiel du ressort de soupape,
les résultats montrent que l’on obtient presque les mêmes résultats. En effet, en
termes d’efforts, on obtient une variation de 0,2 % Figure 24, ce qui est tout à fait
négligeable face aux tolérances imposées par le constructeur. En termes de
vibrations, la spire moyenne étant la plus sensible aux variations, on n’obtient que
2% de différence d’amplitude Figure 25.
Ainsi la considération des masses en mouvement n’est pas un critère solide pour
caractériser les phénomènes vibratoires dans le ressort de soupape.

PROJET DE FIN D’ETUDES
Oussama SIMOU 46
GM5 EI
II. Influence du détarage
1. Définition
Le détarage (ou allègement du régime, réduction de charge) est le choix des
conditions de fonctionnement d’un matériel, largement en deçà des conditions
limites, de façon à réduire les contraintes et augmenter ainsi la fiabilité et la durée
de vie.
Concrètement, le principe de détarage d’un ressort consiste à réduire la charge
appliquée lors de la précontrainte. C’est-à-dire, lors de son cycle, le ressort est
préalablement précontraint par l’actionneur. La valeur de cet effort est définie par
le motoriste.
ISRI France a proposé une solution technologique dans la conception d’un ressort
déjà commercialisé. Il s’agissait de réduire la contrainte liée à la précharge de
15%.
2. Résultats
Il s’agit de comparer les résultats obtenus du le ressort nominal (tel qu’il a été
défini par le constructeur) et du ressort détaré de 15% (proposition d’ISRI)
a. Ressort nominal
Loi de levée
Figure 26 : Résultats essais sur le ressort nominal
Le critère de levée est respecté. La levée jusque 5500 tr/min reste globalement
dans l’épure. Il n’y a pas de rebond franc notable de la soupape sur son siège
Figure 26.

PROJET DE FIN D’ETUDES
Oussama SIMOU 47
GM5 EI
Effort linguet / soupape
En se plaçant au régime extrême, évalué à 5500 tr/min, on étudie la variation
d’effort entre le linguet et la soupape pour prédire l’affolement du ressort.
Figure 27 : Évolution de l'effort linguet soupape à 5500 tr/min
Comme on peut le constater sur la Figure 27, il n’y a pas de perte de contact
linguet soupape (pas d’effort nul sur la plage de degré correspondant à l’ouverture
de la soupape avec présence de choc franc à la fermeture).
On peut donc considérer qu’il n’y a pas d’affolement du ressort jusqu’à 5500
tr/min.

PROJET DE FIN D’ETUDES
Oussama SIMOU 48
GM5 EI
b. Ressort détaré de 15%
Loi de levée
Figure 28 : Essais sur la levée du ressort détaré à 15%
La loi de levée reste dans l’épure jusqu’à 5300 tr/min. Au-delà de ce régime, elle
sort de l’épure de référence. Figure 28
Avec un ressort détaré à 15%, il y a perte de contact sur le nez après 5300 tr/min
avec pour conséquence un mouvement balistique et des rebonds francs.
Vitesse d’impact
Lors d’un cycle moteur, à la fin de la descente du piston la soupape se ferme.
Cette fermeture est commandée par le ressort de soupape. Par sécurité, il
convient que la vitesse de la soupape à 1mm de la culasse soit inférieure à 1m/s.
Or le détarage du ressort à 15% provoque un dépassement de cette vitesse limite
à 5450 tr/min, comme le montre la Figure 29.
Figure 29 : Vitesse d'impact de la soupape sur son siège

PROJET DE FIN D’ETUDES
Oussama SIMOU 49
GM5 EI
Effort linguet / soupape
Figure 30 : Variation effort linguet / soupape
D’après le graphique représenté sur la Figure 30, on constate un problème
dynamique à 5300 tr/min. On remarque aussi des efforts de contact très
importants entre la soupape et le linguet. On observe aussi une variation très
brutale de l’intensité de l’effort linguet / soupape, mettant en évidence un
comportement mal maîtrisé, ainsi qu’une perte de contact entre ces deux derniers
(effort très important caractéristique d’un choc franc après un effort nul).
PROJET DE FIN D’ETUDES
Oussama SIMOU 50
GM5 EI
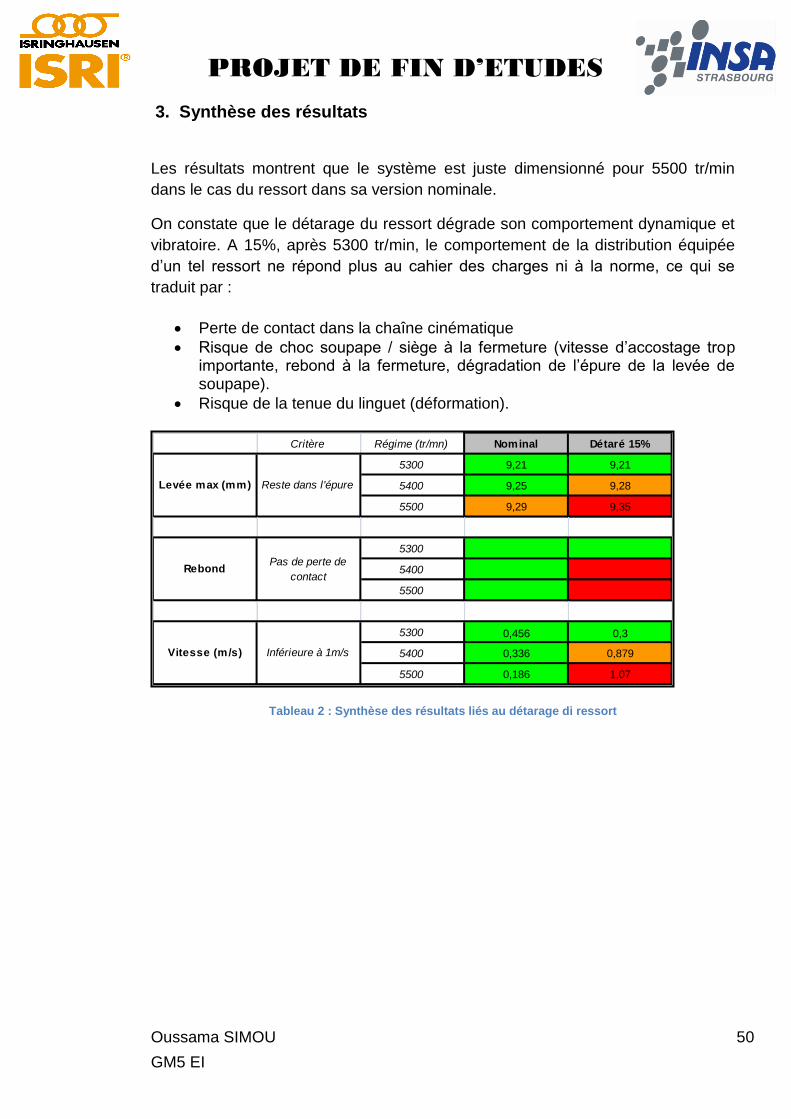
3. Synthèse des résultats
Les résultats montrent que le système est juste dimensionné pour 5500 tr/min
dans le cas du ressort dans sa version nominale.
On constate que le détarage du ressort dégrade son comportement dynamique et
vibratoire. A 15%, après 5300 tr/min, le comportement de la distribution équipée
d’un tel ressort ne répond plus au cahier des charges ni à la norme, ce qui se
traduit par :
Perte de contact dans la chaîne cinématique
Risque de choc soupape / siège à la fermeture (vitesse d’accostage trop importante, rebond à la fermeture, dégradation de l’épure de la levée de soupape).
Risque de la tenue du linguet (déformation).
Tableau 2 : Synthèse des résultats liés au détarage di ressort
Critère Régime (tr/mn) Nominal Détaré 15%
5300 9,21 9,21
5400 9,25 9,28
5500 9,29 9,35
5300
5400
5500
5300 0,456 0,3
5400 0,336 0,879
5500 0,186 1,07
Levée max (mm) Reste dans l'épure
Rebond Pas de perte de
contact
Vitesse (m/s) Inférieure à 1m/s

PROJET DE FIN D’ETUDES
Oussama SIMOU 51
GM5 EI
AMELIORATION DU LOGICIEL DE CALCUL
I. Optimisation de la conception d’un ressort de soupape
Lors de la conception d’un ressort de soupape, ISRI avait comme référence le
cahier des charges du client. Or dans la plupart des cas, il s’avère que le ressort
répond bien aux exigences dynamiques (contraintes maximales, limite de rupture).
En revanche, la conception du ressort laisse apparaître des harmoniques
dangereux dans la plage de fonctionnement du moteur, c’est-à-dire avant le
régime de coupure.
La méthode présentée ici aura ainsi pour élément de départ une fréquence dite
« limite » liée au régime de coupure du moteur. Il faut donc dimensionner un
ressort de telle sorte à ce que sa première fréquence propre soit supérieure à la
fréquence limite.
Méthode d’optimisation du ressort de soupape
Pour pouvoir déterminer entièrement toutes les caractéristiques du ressort, huit
paramètres doivent être imposés. On pourra en particulier fixer les grandeurs
concernant le matériau (ρ, G, τmax), la levée maximale et la garde à spires
jointives.
Pour obtenir un comportement dynamique satisfaisant, il faut aussi imposer :
L’effort à la levée maximale P2
La fréquence dite « limite » déterminée pour rejeter les harmoniques dangereux de la loi de levée au-delà du régime de coupure
Le dernier paramètre à fixer est une grandeur géométrique. En fonction des critères de fonctionnement, ce pourra être l’une des caractéristiques suivantes : Hauteur en place (H1), diamètre intérieur (d), diamètre d’enroulement (D).
Après avoir fixé ces huit éléments, toutes les autres caractéristiques sont
calculées à partir de formules caractéristiques, à savoir la hauteur de précharge,
la hauteur libre, le nombre de spires utiles, le pas… (fournies en annexes).
Une fois toutes les données saisies, le programme affiche la valeur de la première
fréquence propre du ressort. Un code couleur a été ajouté au programme pour
signaler ou la présence (ou non) d’harmonique dangereux avant le régime de
PROJET DE FIN D’ETUDES
Oussama SIMOU 52
GM5 EI
coupure du moteur. En effet, si la fréquence propre du ressort est en dessous du
régime de coupure, la case correspondant à la première fréquence propre du
ressort se met automatiquement en fond rouge ou alors en fond vert le cas
échéant.
Cette méthode permet bien évidemment de réduire le temps de conception du
ressort avant même de lancer le calcul.
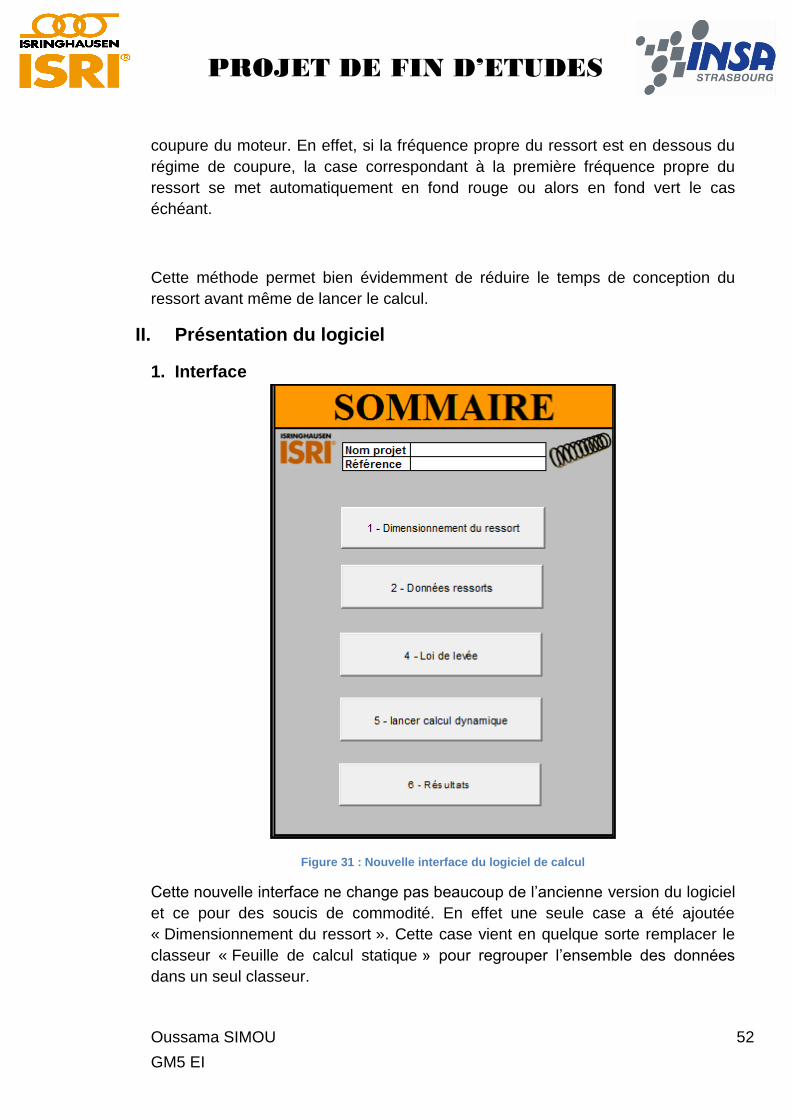
II. Présentation du logiciel
1. Interface
Figure 31 : Nouvelle interface du logiciel de calcul
Cette nouvelle interface ne change pas beaucoup de l’ancienne version du logiciel
et ce pour des soucis de commodité. En effet une seule case a été ajoutée
« Dimensionnement du ressort ». Cette case vient en quelque sorte remplacer le
classeur « Feuille de calcul statique » pour regrouper l’ensemble des données
dans un seul classeur.

PROJET DE FIN D’ETUDES
Oussama SIMOU 53
GM5 EI
2. Détail des onglets du nouveau logiciel
a. Dimensionnement du ressort
Figure 32 : Développement de l'onglet "Dimensionnement du ressort"
Comme il a été indiqué précédemment dans la partie « optimisation du
dimensionnement du ressort » il s’agit de définir huit paramètres (cases grisées).
S’ajoute à cela une base de données « matériaux » qui a été programmée. En
effet, le choix du matériau change les caractéristiques dynamiques du ressort (en
l’occurrence sa résistance limite). Une fois le matériau choisi, l’onglet
« diagramme de Goodman » permet de prédire la tenue en fatigue du ressort de
soupape. Une fois toutes les cases grises remplies, l’affichage des
caractéristiques du ressort est automatiquement généré. Si la case correspondant
à la première fréquence propre du ressort est en fond vert, ceci veut dire que le
lancement du calcul dynamique peut se faire avec la certitude d’écarter
l’harmonique H10 au-delà du régime maximal du moteur.
Le programme de calcul a pour source de données les caractéristiques dans
l’onglet « données du ressort », ce dernier récupère directement les
caractéristiques calculées lors du dimensionnement.

PROJET DE FIN D’ETUDES
Oussama SIMOU 54
GM5 EI
b. La loi de levée
Une fois les calculs effectués, il faudra dès à présent intégrer un paramètre très
important pour le calcul dynamique. Il s’agit de la loi levée imposée par la came.
Cette dernière est une donnée fournie par le constructeur suivant la forme de
came utilisé pour un type de moteur. La loi de levée est donnée sous forme de le
levée [mm] chaque demi-tour d’arbre à cames.
Dans l’ancienne version du logiciel, l’importation de la loi de levée se faisait de
manière fastidieuse. Il fallait en effet, chercher le classeur contenant la loi de came
recherchée, copier les cellules correspondant aux levées et enfin les coller dans le
classeur du logiciel de calcul dynamique.
Cette démarche a été simplifiée par l’intégration de l’outil « parcourir » au sein du
programme de calcul dynamique, dans l’onglet « loi de levée ». Un programme
sous Visual Basic pour Excel a été réalisé dans le but de chercher des cellules
cibles depuis un classeur dont le gabarit a été défini. L’intégralité du détail
concernant cette démarche est expliquée dans les annexes.
Une fois importée, la loi de levée est ainsi représentée sur un graphique. Les lois
de vitesses et accélérations sont aussi représentées.
Figure 33 : Feuille "Loi de levée"

PROJET DE FIN D’ETUDES
Oussama SIMOU 55
GM5 EI
c. Résultats
Après avoir entré toutes les données (données du ressort, loi de levée), il est
possible de lancer le calcul dynamique. Après un temps relativement court, les
résultats sont affichés sous forme de tableau et de graphique.
L’onglet « résultats » du logiciel amélioré est différent de l’ancienne version car on
y trouve des droites s’affichant sur le graphique Figure 34. En effet, on remarque
la présence d’une droite discontinue en rouge qui correspond au régime maximal
du moteur. S’en suivent deux droites correspondant aux harmoniques dangereux.
Sur la feuille de calcul, un tableau affiche les régimes dangereux (régimes où les
harmoniques 9 et 10 se placent). Ce tableau est programmé avec un codage
couleur pour montrer si le régime correspondant aux harmoniques dangereux se
trouve au-delà du régime de coupure ou pas.
Figure 34 : Graphique amélioré des contraintes dynamiques
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1000 2000 3000 4000 5000 6000 7000
Co
ntr
ain
tes
[M
Pa
]
Régime moteur [tr/min]
Courbes de contraintes dynamiques
TKP1 "Contrainte mini" [Mpa]
TKP2 "Contrainte maxi" [Mpa]
ΔTKP en Mpa
Limite matériau en Mpa
H10
H9
Régime de coupure

PROJET DE FIN D’ETUDES
Oussama SIMOU 56
GM5 EI
3. Expérimentation sur un type de ressort
Dans cette partie, l’amélioration du logiciel sera illustrée par la modélisation d’un
ressort. En effet, il s’agit d’optimiser un ressort déjà fabriqué chez ISRI.
Le ressort développé a été modélisé sur l’ancienne version du logiciel de calcul. Il
répond parfaitement au cahier des charges imposé par le client sauf que
l’harmonique dangereux H10 est situé avant le régime de coupure.
Mon travail consistait à se baser sur le même cahier des charges, et grâce au
logiciel, trouver un modèle de ressort qui réponde à toutes les exigences du client
et par-dessus soit optimisé sur le plan vibratoire (c’est-à-dire repousser les
harmoniques au-delà du régime maximal du moteur).
L’ancien ressort avait pour caractéristiques principales un diamètre de fil de
3,1mm et un diamètre d’enroulement de 21,4 mm. Avec cette configuration, le
placement de l’harmonique 10 était à 4880 tr/min.
Sur la nouvelle version du ressort, le diamètre a été modifié est retenu à 3mm et le
diamètre d’enroulement à 20mm. Avec cette configuration l’harmonique 10 a été
repoussé de +11%, donc à un régime moteur de 5450 tr/min qui est bien
évidemment au-delà du régime maximal (fixé à 5200 tr/min).
En modifiant ces paramètres géométriques, il est évident que les résultats
concernant toutes les autres caractéristiques géométriques sont modifiés. En
revanche, ils demeurent cohérents par rapport aux tolérances fixés par le client.

PROJET DE FIN D’ETUDES
Oussama SIMOU 57
GM5 EI
a. Ancienne version du ressort
Voici les données de base de l’ancienne version du ressort :
Figure 35 : Données du ressort fournis par la feuille de calcul statique "ancienne version"
Après avoir saisi la loi de levée, et lancé le calcul dynamique, le résultat obtenu
est fourni sous forme d’un graphique représenté par la Figure 36
Figure 36 : Évolution des contraintes dynamiques dans le fil du ressort
Remarques :
Apparition d’un pic de contraintes (H10) vers 4800 tr/min (avant le régime de coupure)
Dégradation du ressort après 5000 tr/min
0100200300400500600700800900
1000110012001300
1000 2000 3000 4000 5000 6000 7000
Co
ntr
ain
tes [
MP
a]
Régime moteur [tr/min]
Courbes de contraintes dynamiques
TKP1 en Mpa
TKP2 en Mpa
ΔTKP en Mpa
Limite en Mpa
PROJET DE FIN D’ETUDES
Oussama SIMOU 58
GM5 EI
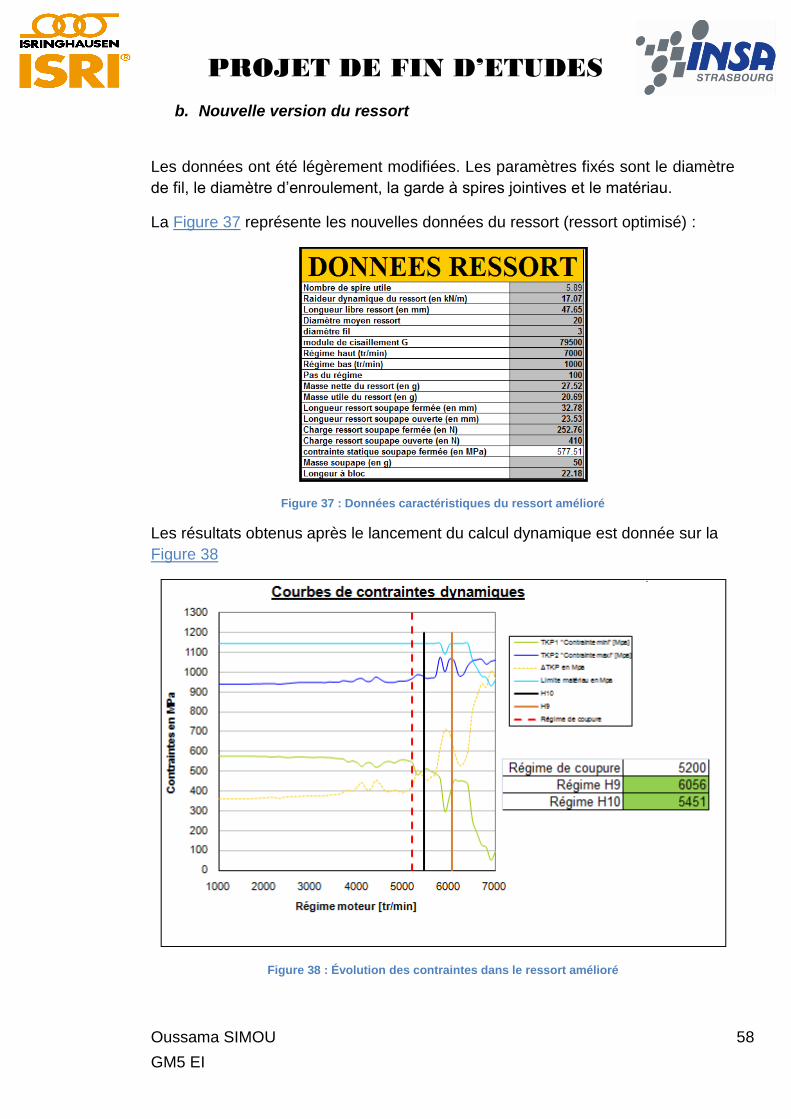
b. Nouvelle version du ressort
Les données ont été légèrement modifiées. Les paramètres fixés sont le diamètre
de fil, le diamètre d’enroulement, la garde à spires jointives et le matériau.
La Figure 37 représente les nouvelles données du ressort (ressort optimisé) :
Figure 37 : Données caractéristiques du ressort amélioré
Les résultats obtenus après le lancement du calcul dynamique est donnée sur la
Figure 38
Figure 38 : Évolution des contraintes dans le ressort amélioré

PROJET DE FIN D’ETUDES
Oussama SIMOU 59
GM5 EI
Remarques:
Déplacement des harmoniques dangereux au-delà du régime maximal Comportement satisfaisant du ressort jusqu’à 5200 tr/min
Conclusion de l’étude :
On remarque qu’en réduisant la valeur du diamètre du fil de 3,1 à 3mm et celle du
diamètre d’enroulement de 21,4 mm à 20 mm on arrive à repousser les
harmoniques dangereux au-delà du régime de coupure. En effet, dans l’ancienne
version du ressort, l’harmonique 10 de la loi apparaissait au régime 4776 tr/min.
Après modification du diamètre intérieur et du diamètre d’enroulement,
l’harmonique 10 apparait au régime 5451 tr/min.
Ainsi une diminution de 3% de la valeur du diamètre de fil et de 6% du diamètre
d’enroulement repousserait l’harmonique 10

PROJET DE FIN D’ETUDES
Oussama SIMOU 60
GM5 EI
CONCLUSION
I. Conclusion sur les travaux effectués
Les expériences réalisées lors du projet ont été déterminantes en réponse à la
problématique posée par ISRI.
Dans un premier temps, une étude générale sur la distribution a été développée
afin de situer le contexte d’étude. Considérée comme un système complexe, le
détail sur l’analyse vibratoire de la distribution n’a pas été réalisé. En effet, le sujet
porte sur le ressort de soupape, produit principal d’ISRI. En revanche, j’ai réalisé
un cahier des charges sur l’influence des éléments de distribution sur le
comportement vibratoire du ressort de soupape. L’étude réalisée à partir de ce
cahier des charges peut servir de support pédagogique pour un éventuel projet à
venir dans le cadre de l’analyse vibratoire des éléments de la distribution.
Dans les objectifs du projet, l’étude de l’influence des masses mises en
mouvement lors des cycles d’ouverture et de fermeture de la soupape a été une
piste privilégiée pour voir s’il existe une différence de comportement vibratoire du
ressort. C’est-à-dire voir si le fait de tenir compte uniquement de la masse du
ressort ou de tout l’ensemble (ressort, coupelle, demi-lune) changerait la réponse
vibratoire du ressort à certains régimes. Compte tenu des résultats obtenus, en
doublant la masse mise en mouvement, la réponse en termes d’effort est
d’environ 0,2% (ce qui est tout à fait négligeable) alors que sur le plan vibratoire,
on enregistre une différence de 2%. Ceci reste tout de même négligeable et nous
mène à la conclusion que les masses mises en mouvement n’ont pas vraiment
d’influence sur le comportement vibratoire du ressort.
Concernant le détarage du ressort, technique de réduction de charge lors de la
mise en place, les résultats montrent bien l’inefficacité de cette méthode car elle
engendre des problèmes de rebond de la soupape sur son siège, de dépassement
de vitesse limite de la soupape à 1mm de son siège, des décollements entre la
soupape et le linguet.
Enfin, l’optimisation du ressort a été l’élément clé de ce projet. Dans ce contexte,
le logiciel de calcul dynamique a été amélioré de telle sorte à ce que l’aspect
vibratoire y soit intégré. En effet, dans la nouvelle version du logiciel, il s’agit de
prendre comme référence le régime maximal du moteur pour définir une
fréquence minimale du ressort, fréquence dite « limite ». Une fois cette dernière
calculée, on peut commencer à concevoir le ressort. Le but de cette méthode est
d’écarter tous les harmoniques de la loi de levée au-delà du régime de coupure.
Cette amélioration est très intéressante dans le sens où le ressort sera désormais
conçu de manière à ce qu’il soit optimisé tant sur le plan dynamique que
fréquentiel. Cette amélioration s’accompagne aussi d’une diminution du temps de
conception.

PROJET DE FIN D’ETUDES
Oussama SIMOU 61
GM5 EI
II. Vers d’autres solutions technologiques
Indépendamment des autres éléments de distribution, l’aspect vibratoire du
ressort de soupape peut éventuellement être optimisé par l’utilisation de certains
matériaux adéquats. La nitruration semble être un procédé intéressant dans le
cadre de cette étude.
1. La nitruration
La nitruration ou apport d’azote par diffusion à des températures comprises entre
350 et 600°C est à la base d’une famille de traitements qui diffèrent par la nature
des éléments complémentaires d’apport (C, O, S…) et les modes de mise en
œuvre.
Le durcissement de la couche traitée est obtenu par transformation in situ lors de
la diffusion et, de ce fait, aucun traitement complémentaire n’est nécessaire.
Les propriétés d’emploi des pièces nitrurées dépendent fortement des nuances
d’aciers utilisées et des microstructures obtenues par traitement.
Ce type de traitement permet de produire des structures dont l’archétype est le
suivant (figure) :
Une couche de combinaison : composée de nitrures de fer en extrême surface dont l’épaisseur peut varier de 0 à 30 μm.
Une couche de diffusion dont l’épaisseur typique est de quelques dixièmes de millimètre, mais qui peut atteindre exceptionnellement des valeurs légèrement supérieures au millimètre, dans laquelle l’azote est en solution interstitielle ou combiné sous forme de nitrures qui peuvent conduire, selon les éléments d’alliages présents dans l’acier, à des durcissements importants.
Figure 39 : Représentation microscopique d'une couche nitrurée
PROJET DE FIN D’ETUDES
Oussama SIMOU 62
GM5 EI
2. Objectif de la nitruration
La nitruration a pour principal objectif de durcir et renforcer la surface de la pièce
traitée. Dans le cas d’un ressort de soupape, durcir la surface reviendrait à
augmenter ses caractéristiques dynamiques. Se faisant, le ressort durci dispose
donc d’une raideur équivalente plus importante que celle d’un acier non traité sans
pour autant dégrader sa masse équivalente (la nitruration augmente beaucoup
plus la raideur de la pièce que sa masse). Ainsi, avec une raideur équivalente plus
importante, la première fréquence propre du ressort sera donc augmentée
permettant ainsi aux harmoniques dangereux de la loi de levée de se situer au-
delà du régime de coupure du moteur.
III. Apport personnel
Le projet proposé par ISRI concernant l’analyse vibratoire du ressort de soupape a
été très intéressant dans la mesure où il m’a aidé à développer mes
connaissances dans le domaine de l’industrie automobile.
Ce projet a été très formateur dans le cadre de mes études d’ingénieur
mécanicien, il a participé au développement de mon esprit d’analyse et de critique.
Enfin ce projet m’a permis de développer mon sens du relationnel, critère très
important dans le monde de l’entreprise.

PROJET DE FIN D’ETUDES
Oussama SIMOU 63
GM5 EI
Bibliographie

PROJET DE FIN D’ETUDES
Oussama SIMOU 64
GM5 EI
M. VASIN P., an impact model for the industrial cam-follower system, thèse soumise à l’institut polytechnique de WORCESTERS, Octobre 2011
M. GEOFFROY B., Distribution à soupapes, Techniques de l’ingénieur
MM. GIRONNET B. & LOURADOUR G., Comportement dynamique des ressorts, Techniques de l’ingénieur, 1983
M. RITTER X., Modélisation de la distribution d’un moteur à arbre à cames en tête, thèse effectuée à l’Institut National des Sciences Appliquées de Lyon, Janvier 2006
MM. AHN K. & KIM S., Influence of spring dynamics and friction on a spring-actuated cam system, Archive of Applied Mechanics, 2001, vol.71
MM. AL MAJID A. & DUFOUR R., Harmonic Response of a structure mounted on an isolator modeled with a hysteretic operator, Journal of Sound and Vibration, 2004, vol. 277
M. RIVIN E., Handbook on Stiffness & Damping in Mechanical Design, 2003
M. FERRATON E., Programme de calcul du comportement dynamique des ressorts de soupape, Projet de fin d’étude ISRI France, 2009