Embed Size (px)
Citation preview
Spring 2012
Signals and Systems
Chapter SS-2Linear Time-Invariant Systems
Feng-Li LianNTU-EE
Feb12 – Jun12
Figures and images used in these lecture notes are adopted from“Signals & Systems” by Alan V. Oppenheim and Alan S. Willsky, 1997
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-2Outline
Discrete-Time Linear Time-Invariant Systems• The convolution sum
Continuous-Time Linear Time-Invariant Systems• The convolution integral
Properties of Linear Time-Invariant Systems
Causal Linear Time-Invariant Systems Described by Differential & Difference Equations
Singularity Functions
h(t)h[n]
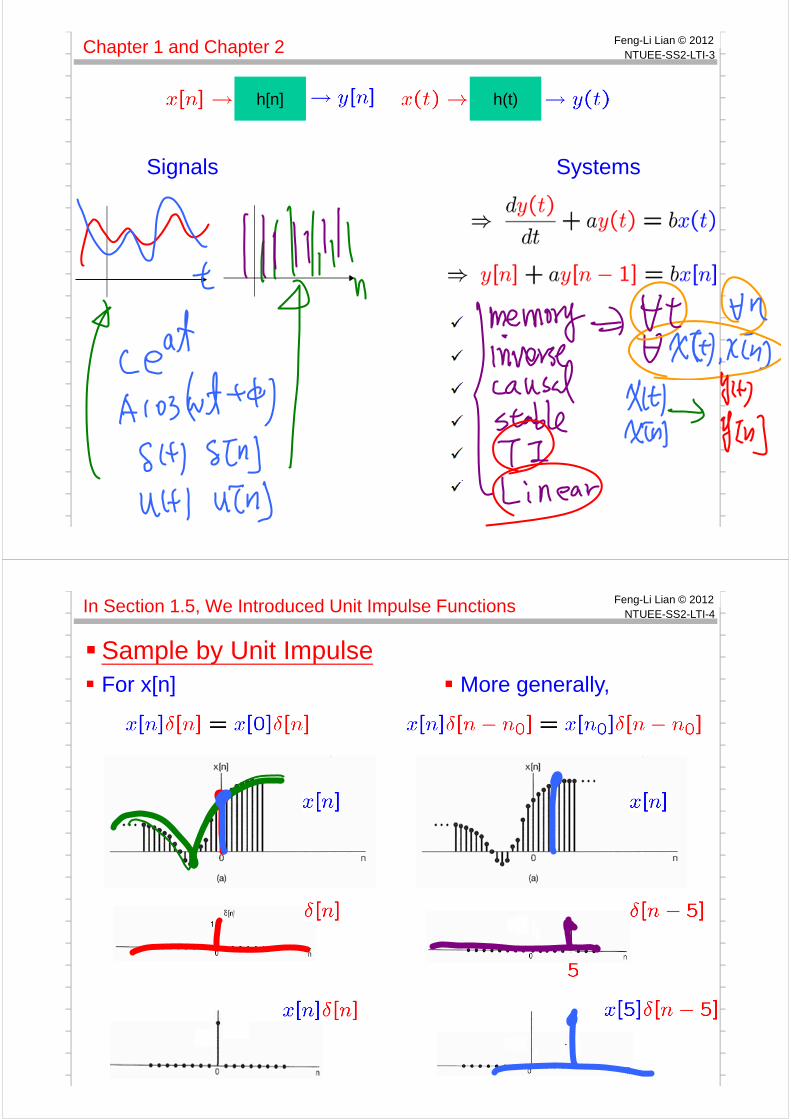
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-3Chapter 1 and Chapter 2
h(t)h[n]
SystemsSignals
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-4In Section 1.5, We Introduced Unit Impulse Functions
Sample by Unit ImpulseFor x[n] More generally,
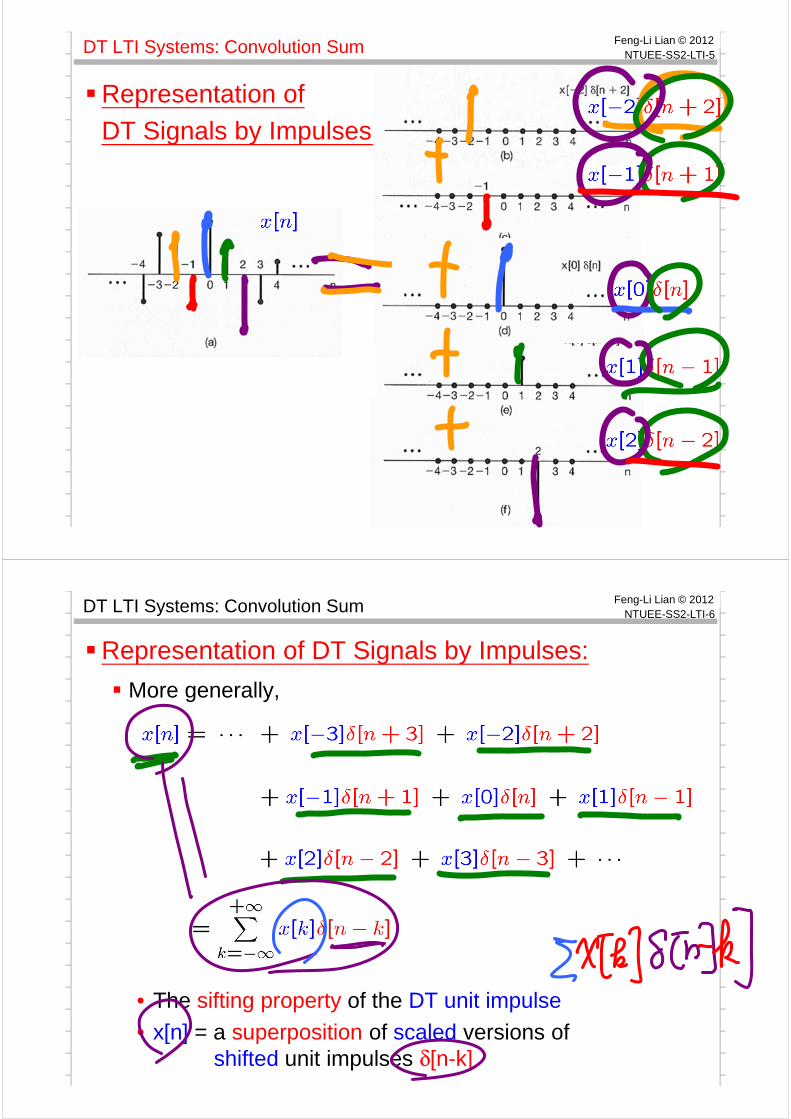
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-5DT LTI Systems: Convolution Sum
Representation of
DT Signals by Impulses:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-6DT LTI Systems: Convolution Sum
Representation of DT Signals by Impulses:
More generally,
• The sifting property of the DT unit impulse
• x[n] = a superposition of scaled versions of shifted unit impulses [n-k]
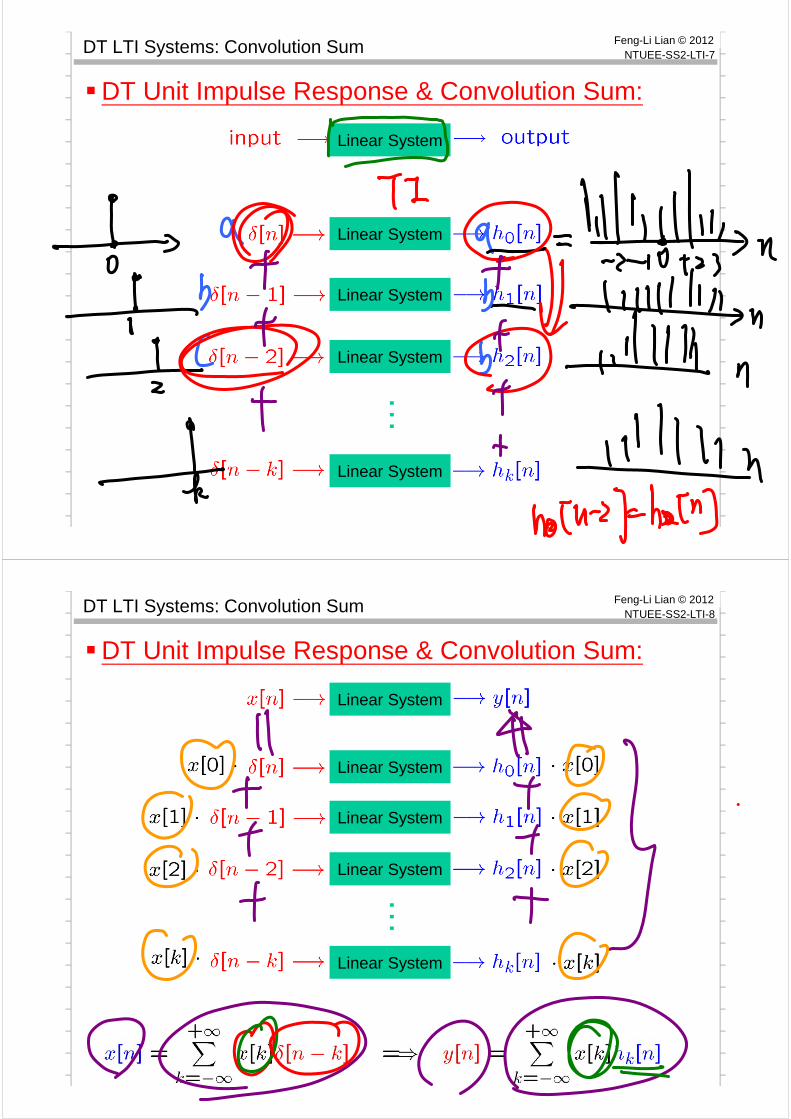
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-7DT LTI Systems: Convolution Sum
DT Unit Impulse Response & Convolution Sum:
Linear System
Linear System
Linear System
Linear System
Linear System
…
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-8DT LTI Systems: Convolution Sum
DT Unit Impulse Response & Convolution Sum:
Linear System
Linear System
Linear System
Linear System
Linear System
…

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-9DT LTI Systems: Convolution Sum
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-10DT LTI Systems: Convolution Sum
Linear System

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-11DT LTI Systems: Convolution Sum
If the linear system (L) is also time-invariant (TI)
• Then,
Hence, for an LTI system,
• Known as the convolution of x[n] & h[n]
• Referred as the convolution sum or superposition sum
Symbolically,
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-12DT LTI Systems: Convolution Sum
Example 2.1:

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-13DT LTI Systems: Convolution Sum
Example 2.2:
Feng-Li Lian © 2011NTUEE-SS2-LTI-14DT LTI Systems: Convolution Sum
Example 2.2:

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-15DT LTI Systems: Convolution Sum
Example 2.1:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-16DT LTI Systems: Convolution Sum
Example 2.2:
Feng-Li Lian © 2011Feng-Li Lian © 2012
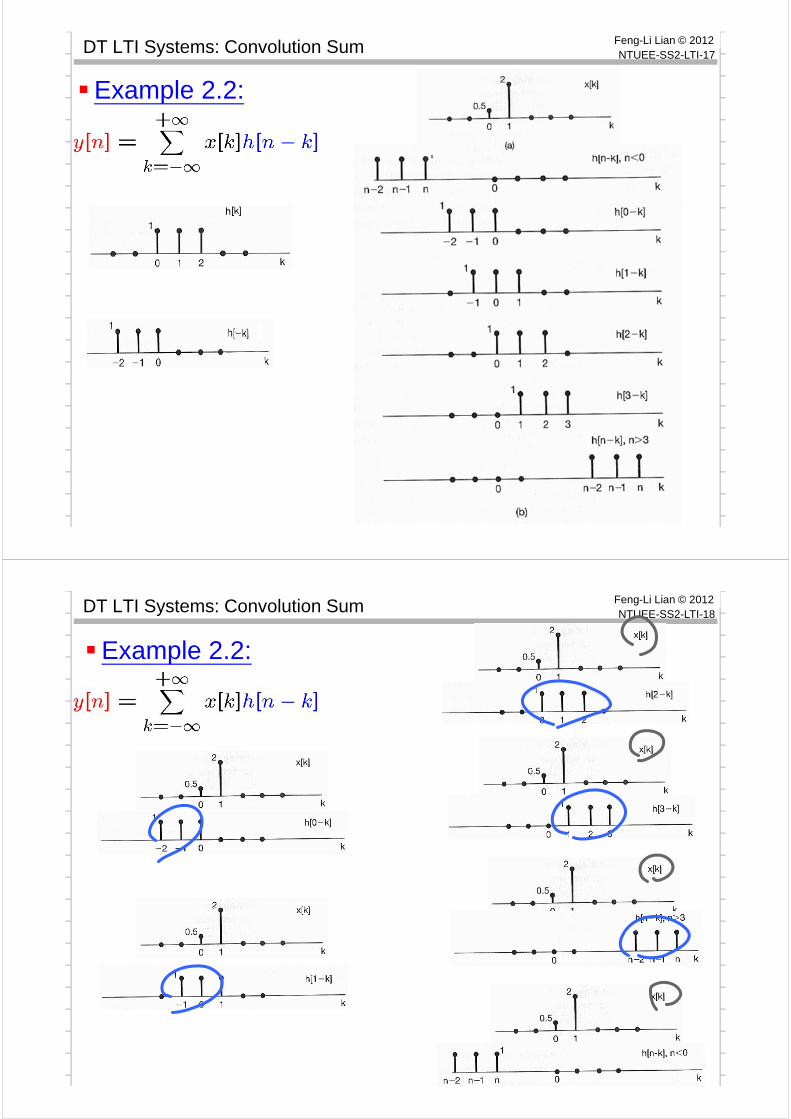
Example 2.2:
DT LTI Systems: Convolution Sum NTUEE-SS2-LTI-17
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-18DT LTI Systems: Convolution Sum
Example 2.2:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-19DT LTI Systems: Convolution Sum
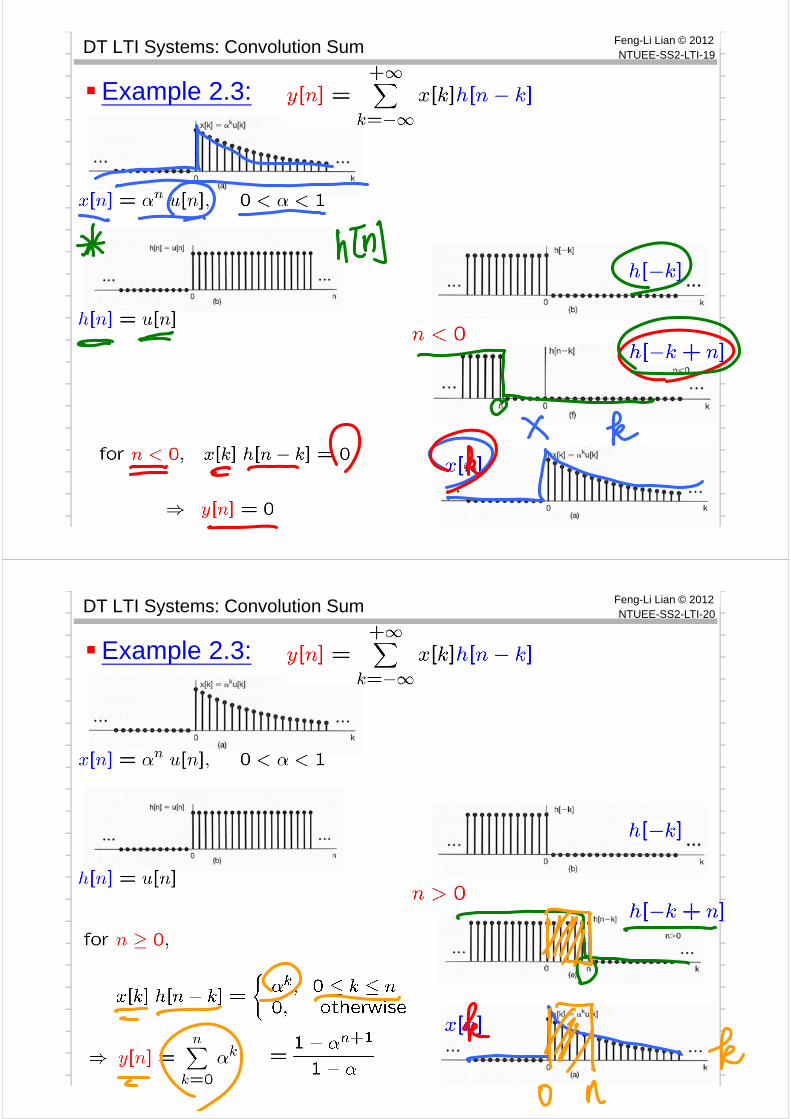
Example 2.3:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-20DT LTI Systems: Convolution Sum
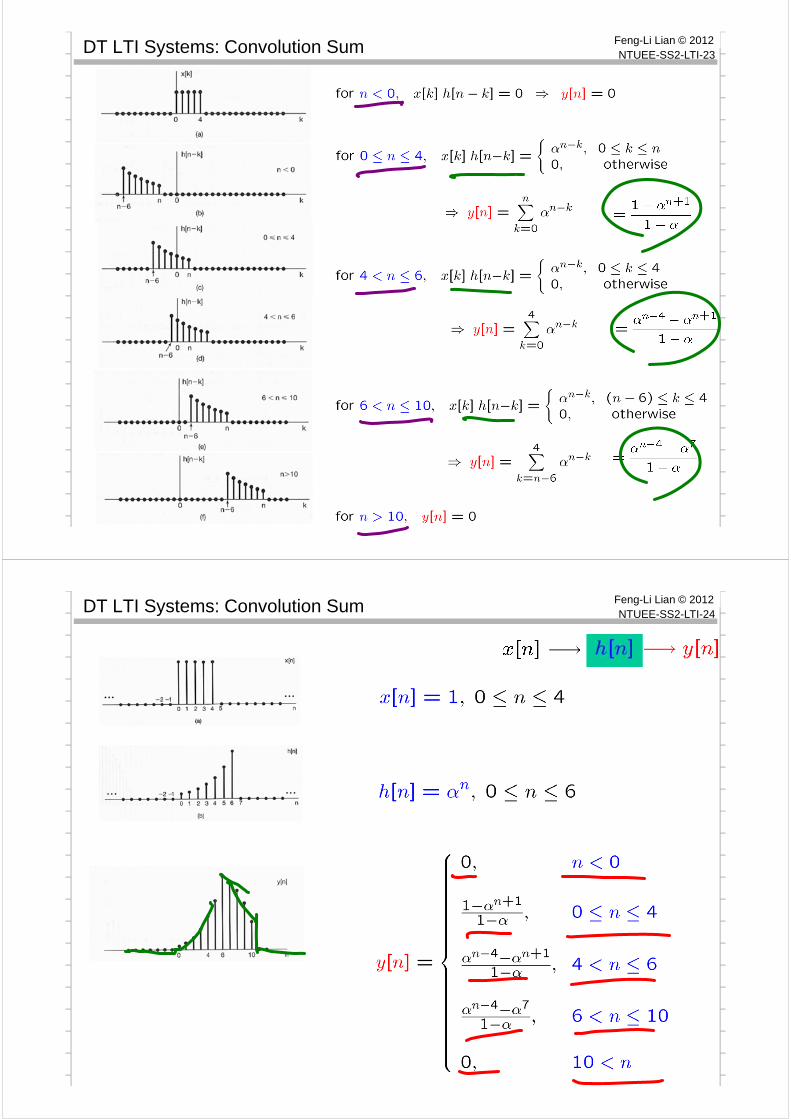
Example 2.3:

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-21DT LTI Systems: Convolution Sum
Example 2.3:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-22DT LTI Systems: Convolution Sum
Example 2.4:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-23DT LTI Systems: Convolution Sum
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-24DT LTI Systems: Convolution Sum
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-25DT LTI Systems: Convolution Sum
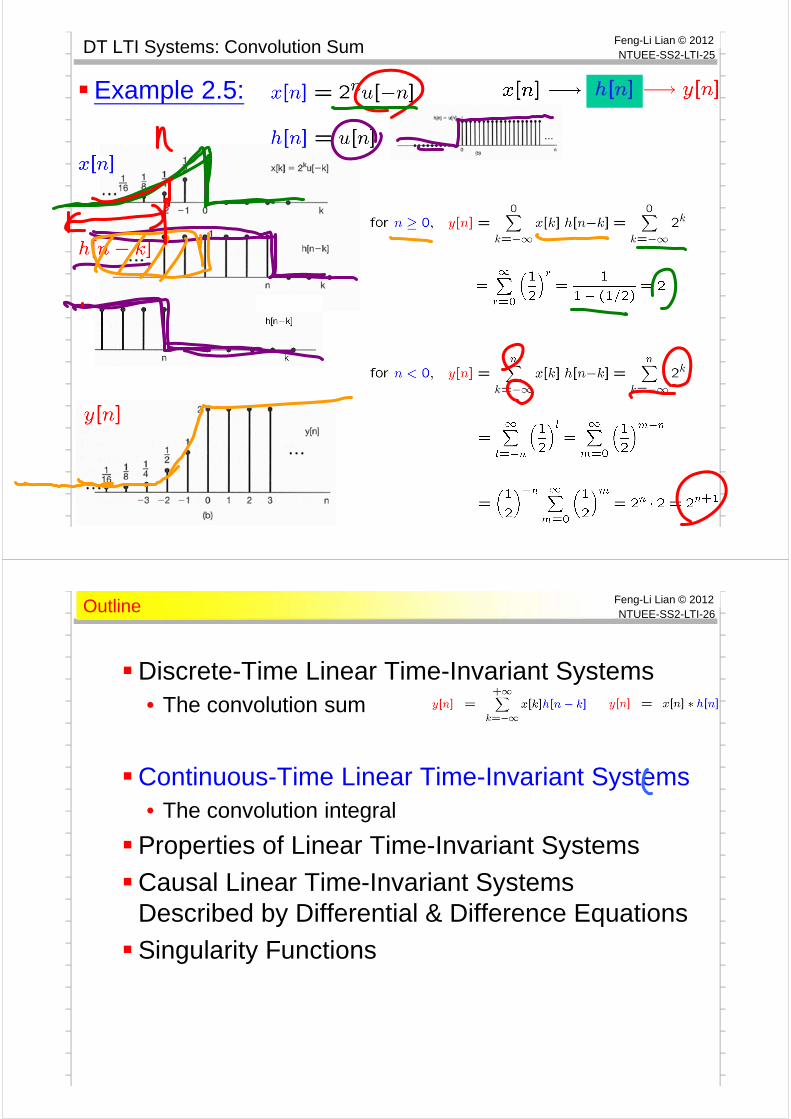
Example 2.5:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-26Outline
Discrete-Time Linear Time-Invariant Systems• The convolution sum
Continuous-Time Linear Time-Invariant Systems• The convolution integral
Properties of Linear Time-Invariant Systems
Causal Linear Time-Invariant Systems Described by Differential & Difference Equations
Singularity Functions

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-27CT LTI Systems: Convolution Integral
Representation of CT Signals by Impulses:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-28CT LTI Systems: Convolution Integral
Representation of CT Signals by Impulses:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-29CT LTI Systems: Convolution Integral
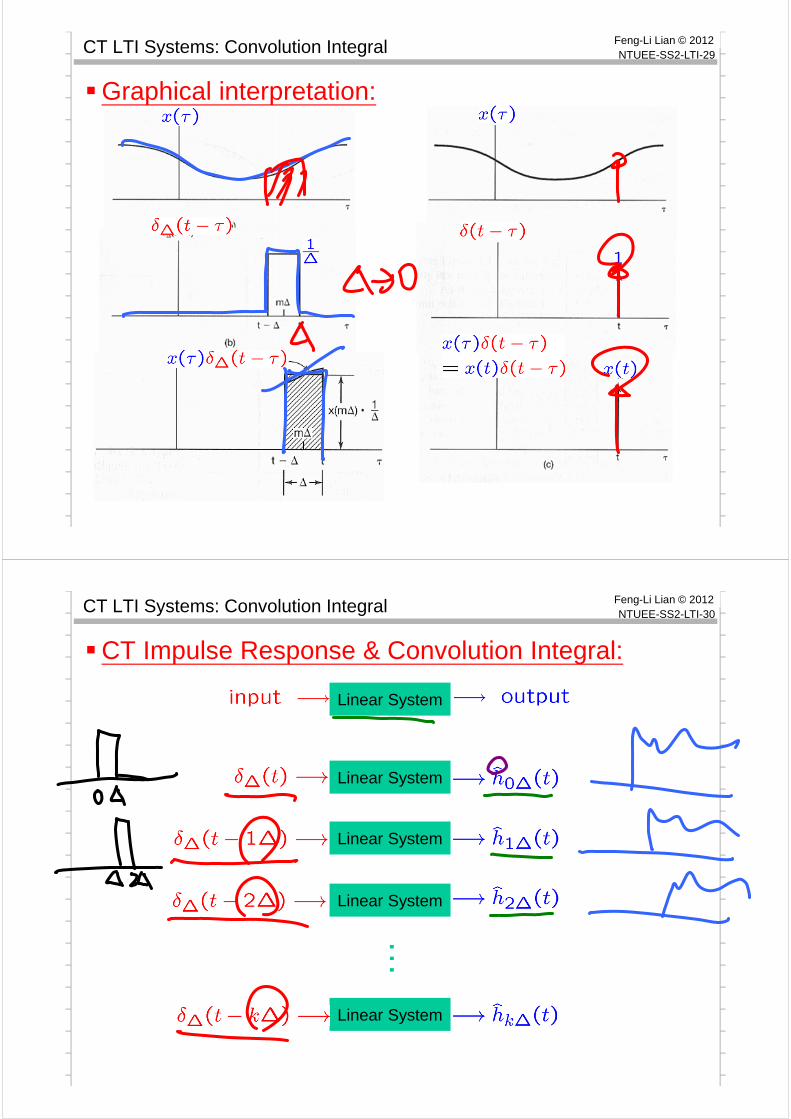
Graphical interpretation:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-30CT LTI Systems: Convolution Integral
CT Impulse Response & Convolution Integral:
Linear System
Linear System
Linear System
Linear System
Linear System
…
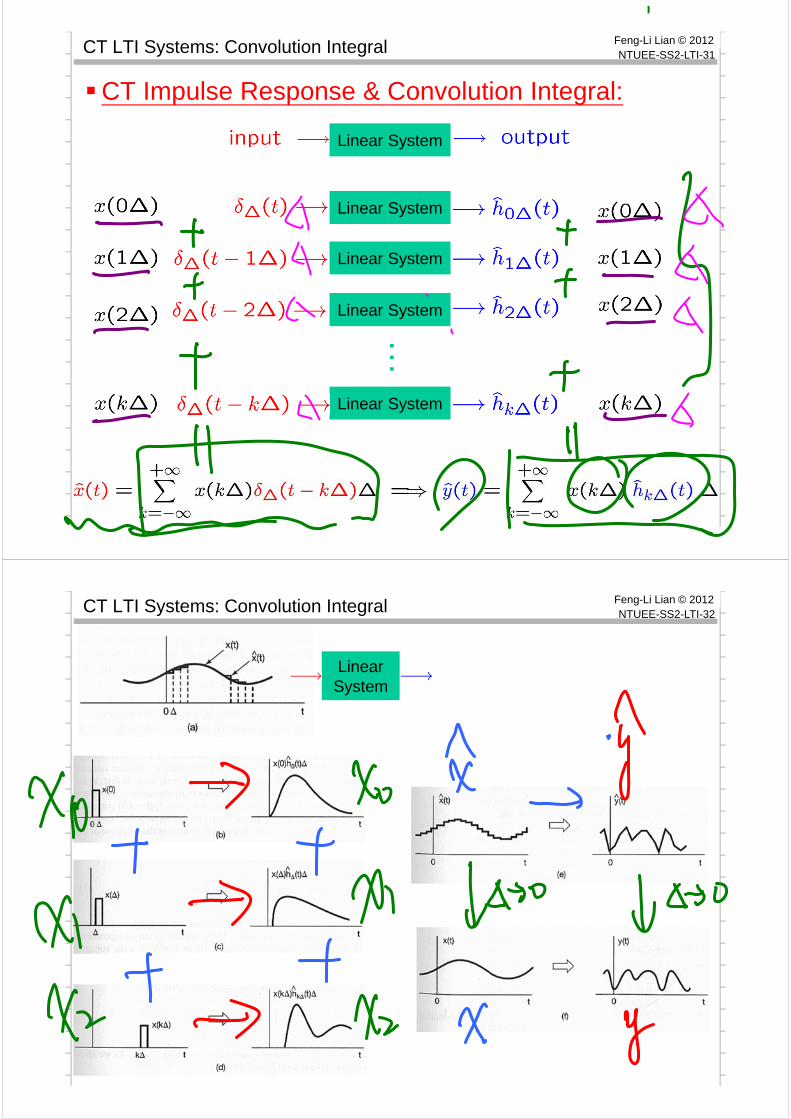
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-31CT LTI Systems: Convolution Integral
CT Impulse Response & Convolution Integral:
Linear System
Linear System
Linear System
Linear System
Linear System…
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-32CT LTI Systems: Convolution Integral
LinearSystem
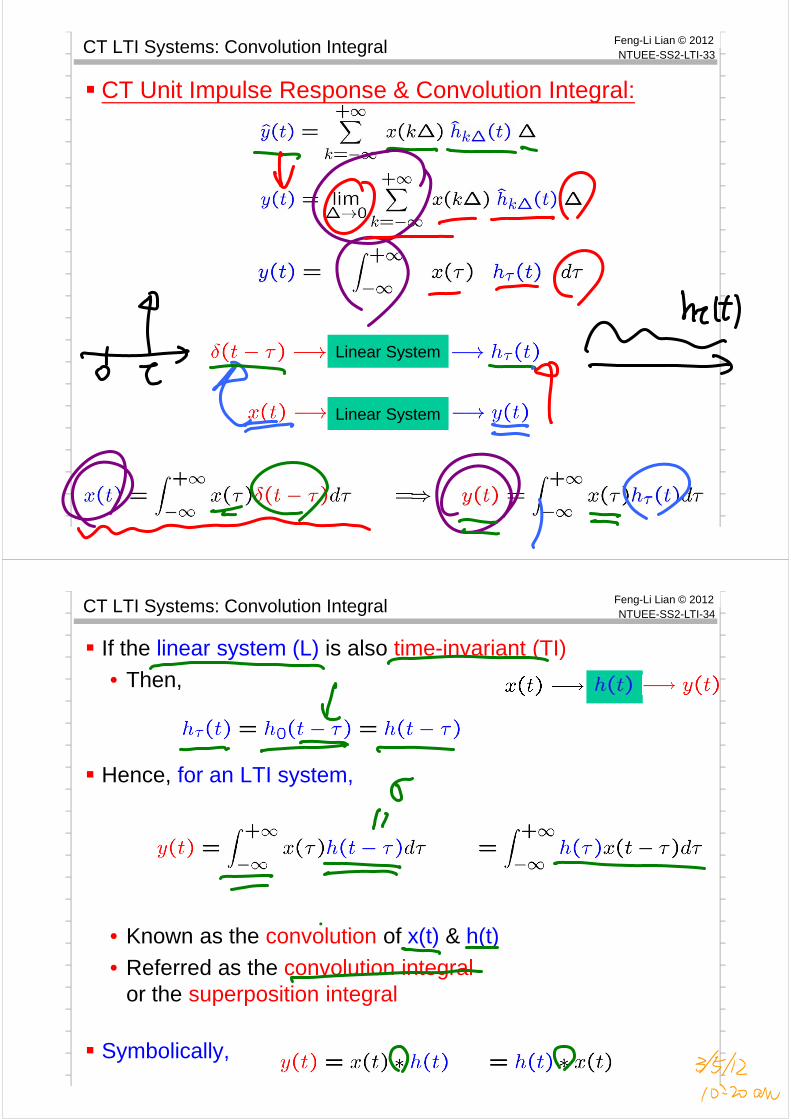
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-33CT LTI Systems: Convolution Integral
CT Unit Impulse Response & Convolution Integral:
Linear System
Linear System
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-34CT LTI Systems: Convolution Integral
If the linear system (L) is also time-invariant (TI)
• Then,
Hence, for an LTI system,
• Known as the convolution of x(t) & h(t)
• Referred as the convolution integralor the superposition integral
Symbolically,
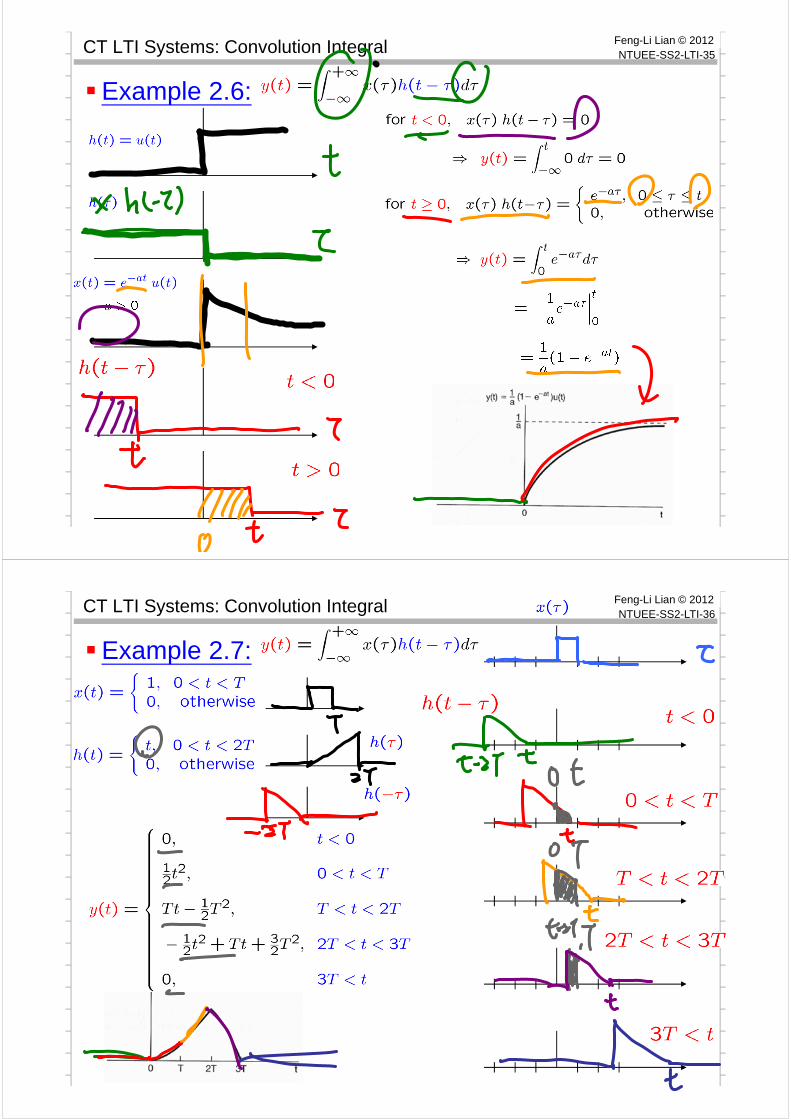
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-35CT LTI Systems: Convolution Integral
Example 2.6:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-36CT LTI Systems: Convolution Integral
Example 2.7:

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-37CT LTI Systems: Convolution Integral
Example 2.8:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-38Convolution Sum and Integral
Signal and System:
h(t)
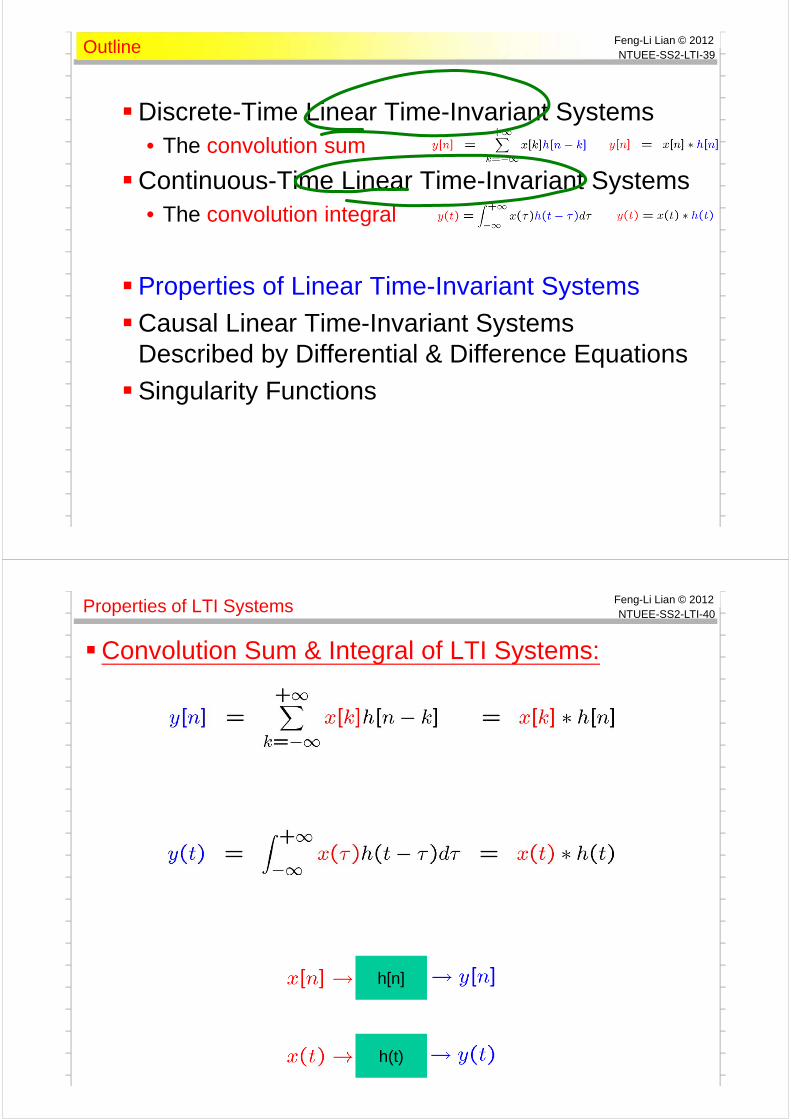
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-39Outline
Discrete-Time Linear Time-Invariant Systems• The convolution sum
Continuous-Time Linear Time-Invariant Systems• The convolution integral
Properties of Linear Time-Invariant Systems
Causal Linear Time-Invariant Systems Described by Differential & Difference Equations
Singularity Functions
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-40Properties of LTI Systems
Convolution Sum & Integral of LTI Systems:
h(t)
h[n]
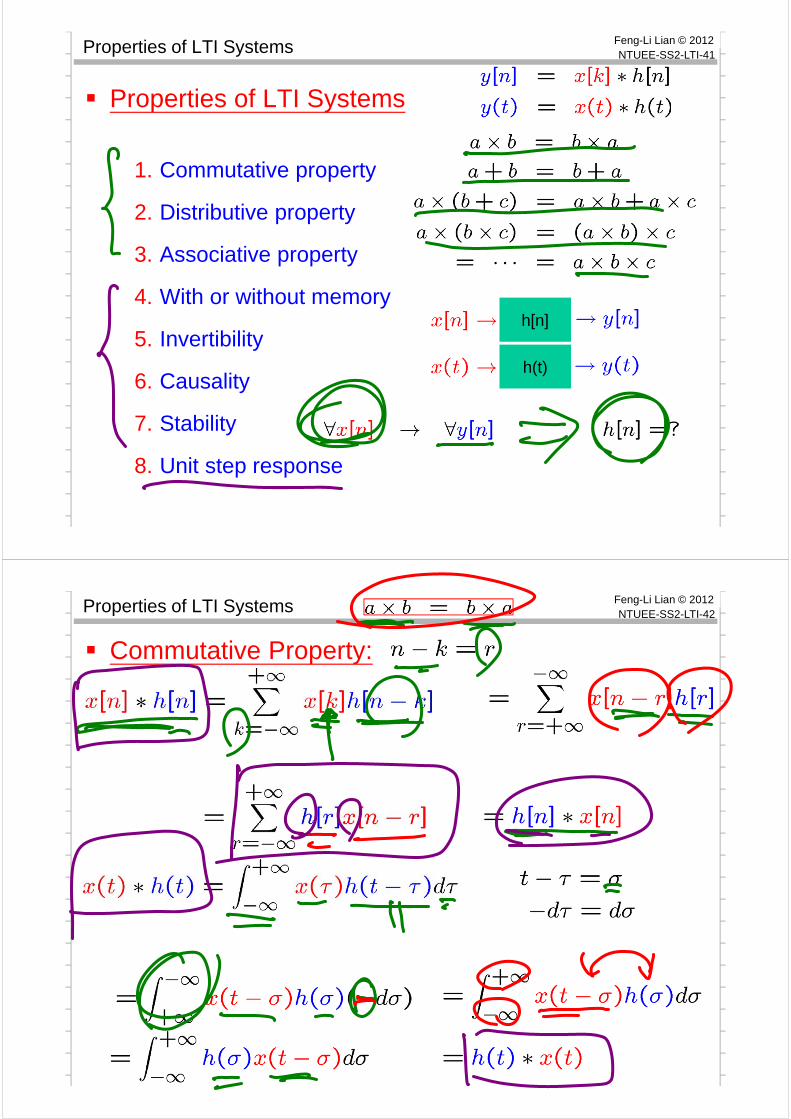
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-41Properties of LTI Systems
Properties of LTI Systems
1. Commutative property
2. Distributive property
3. Associative property
4. With or without memory
5. Invertibility
6. Causality
7. Stability
8. Unit step response
h[n]
h(t)
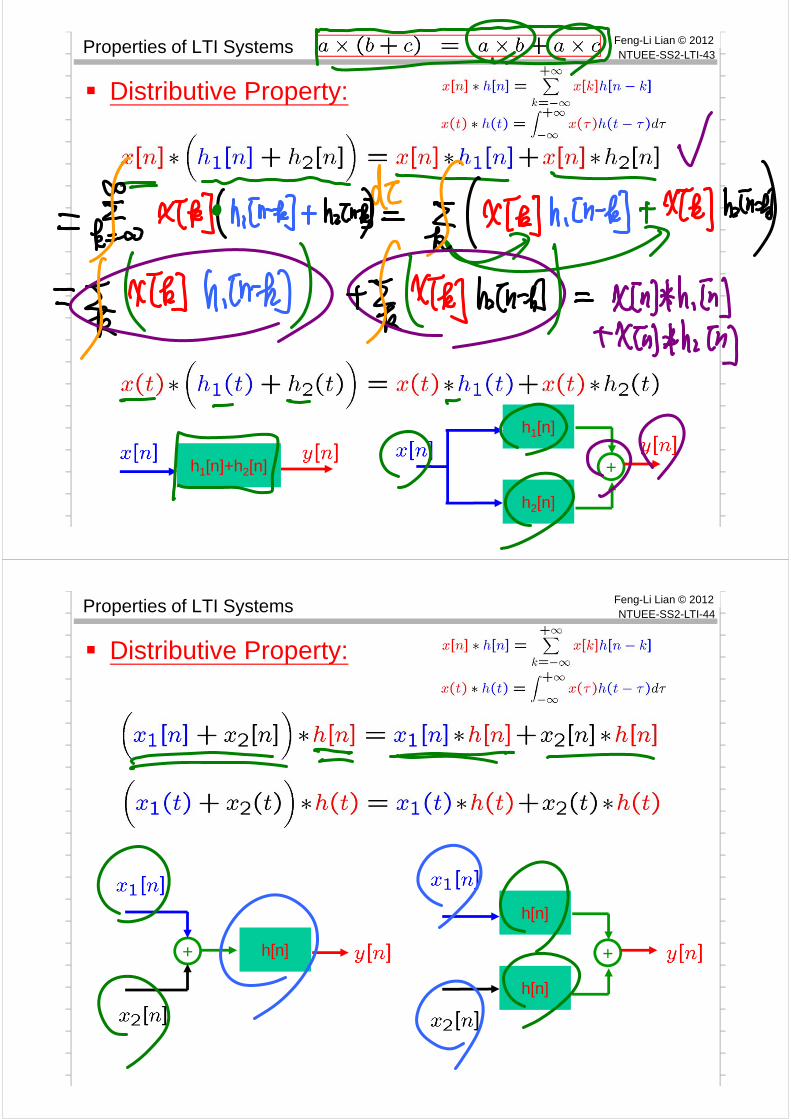
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-42Properties of LTI Systems
Commutative Property:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-43Properties of LTI Systems
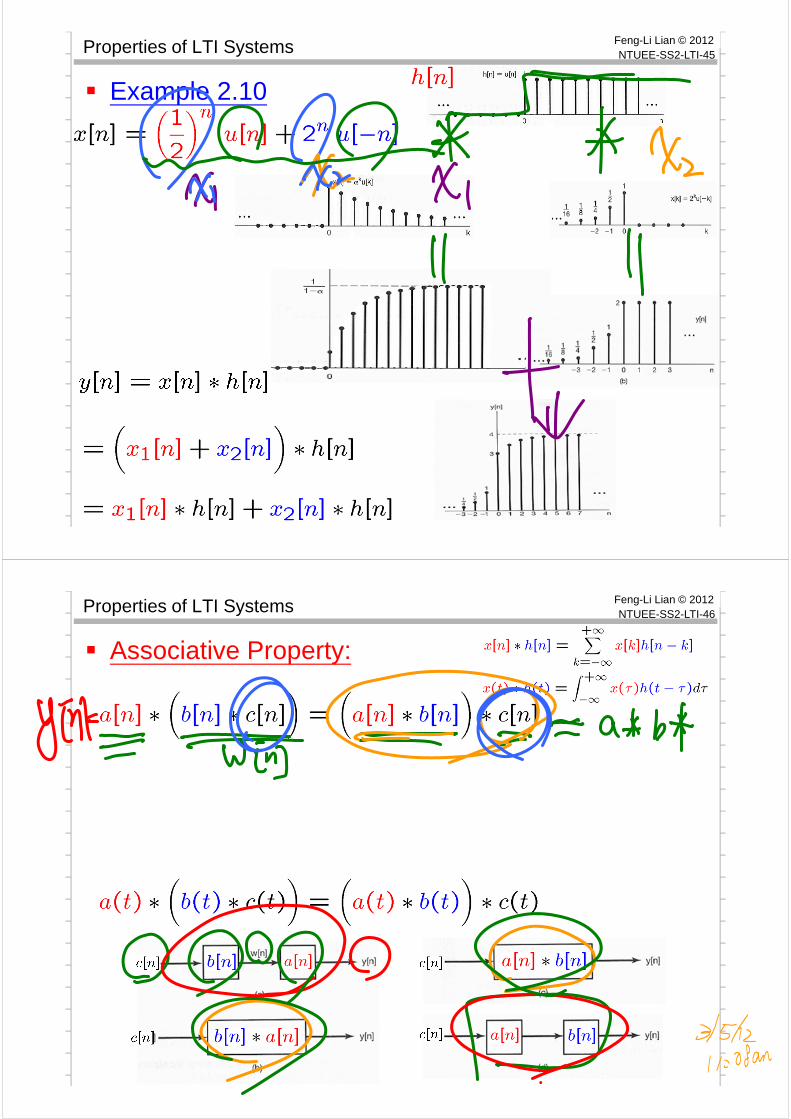
Distributive Property:
h2[n]
+
h1[n]
h1[n]+h2[n]
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-44Properties of LTI Systems
Distributive Property:
h[n]+
h[n]
+
h[n]
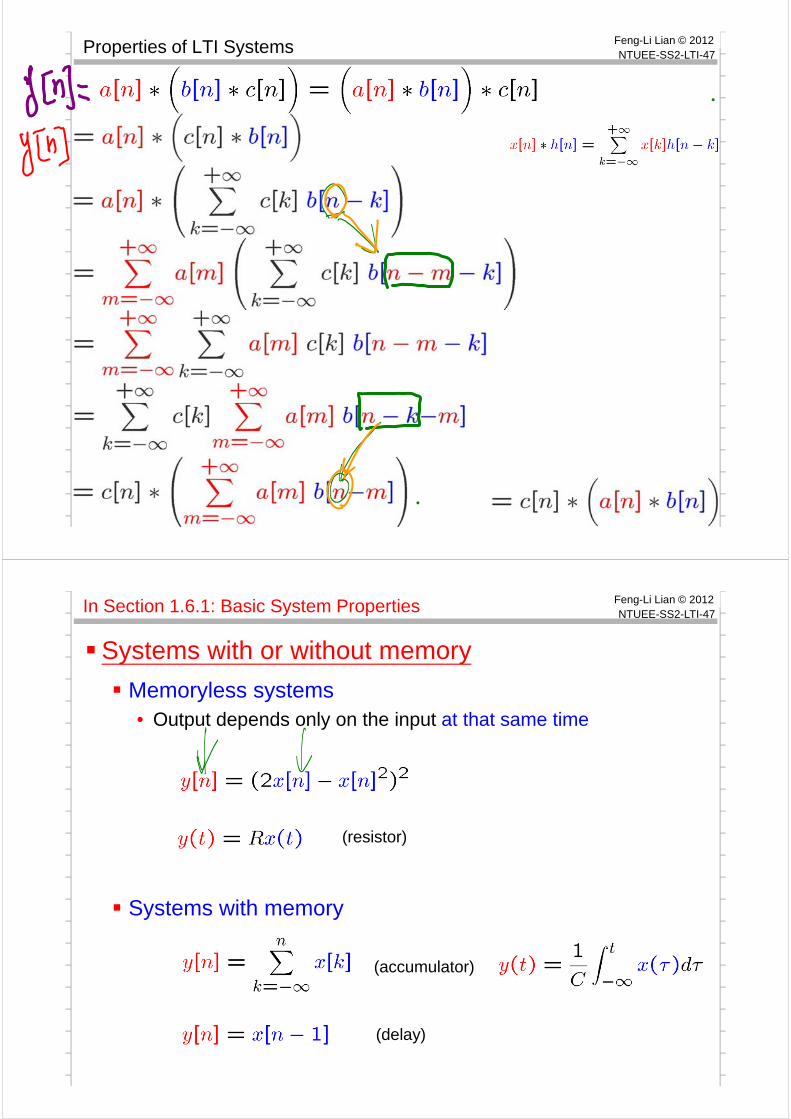
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-45Properties of LTI Systems
Example 2.10
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-46Properties of LTI Systems
Associative Property:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-47Properties of LTI Systems
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-47In Section 1.6.1: Basic System Properties
Systems with or without memory
Memoryless systems• Output depends only on the input at that same time
Systems with memory
(resistor)
(delay)
(accumulator)
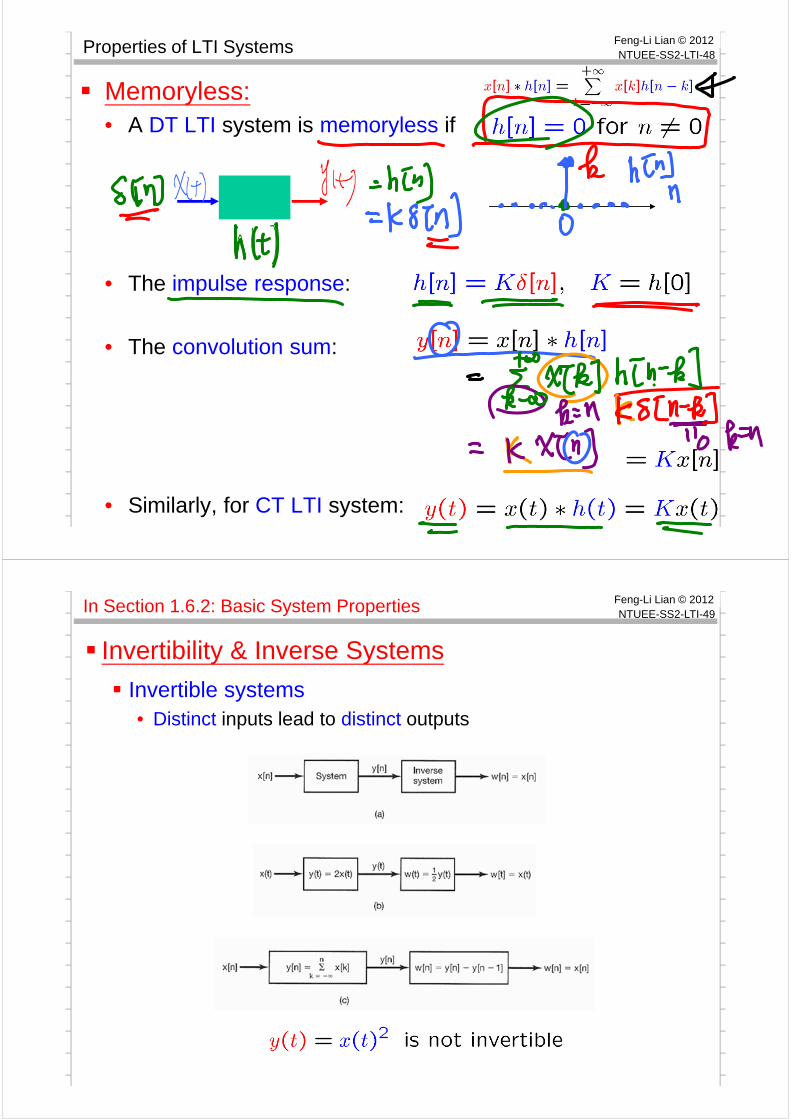
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-48Properties of LTI Systems
Memoryless:• A DT LTI system is memoryless if
• The impulse response:
• The convolution sum:
• Similarly, for CT LTI system:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-49In Section 1.6.2: Basic System Properties
Invertibility & Inverse Systems
Invertible systems• Distinct inputs lead to distinct outputs
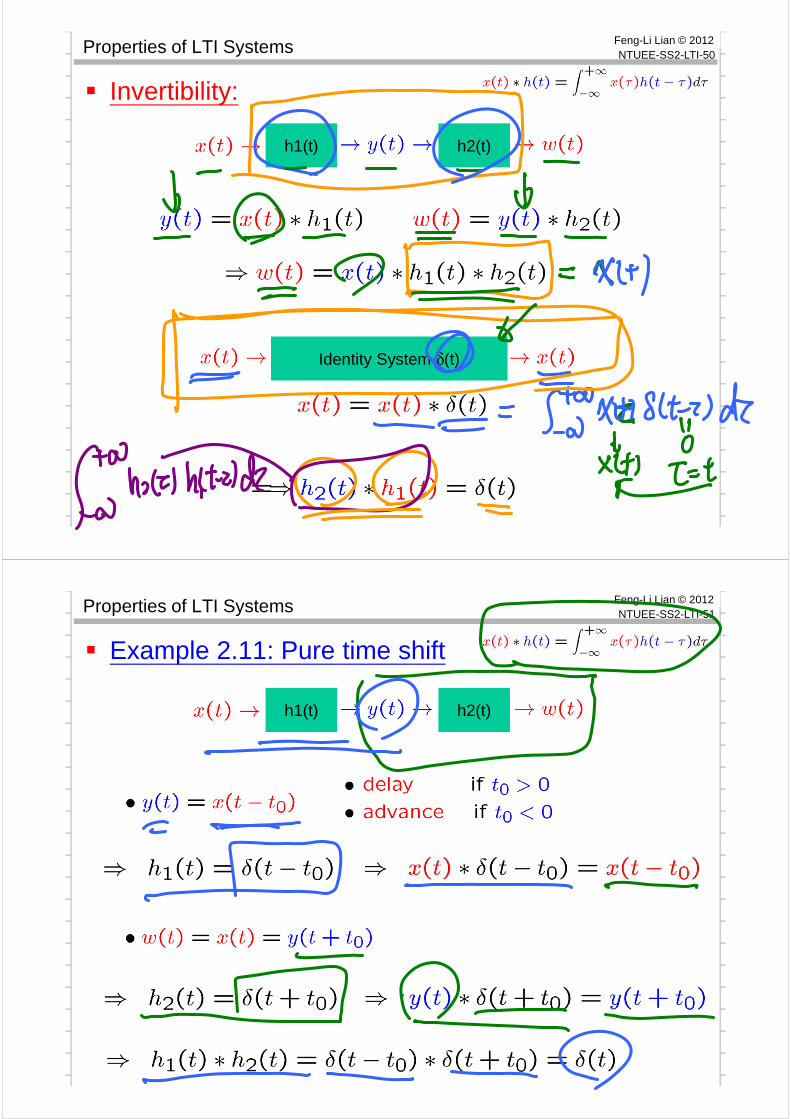
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-50Properties of LTI Systems
Invertibility:
h1(t)
Identity System (t)
h2(t)
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-51Properties of LTI Systems
Example 2.11: Pure time shift
h1(t) h2(t)
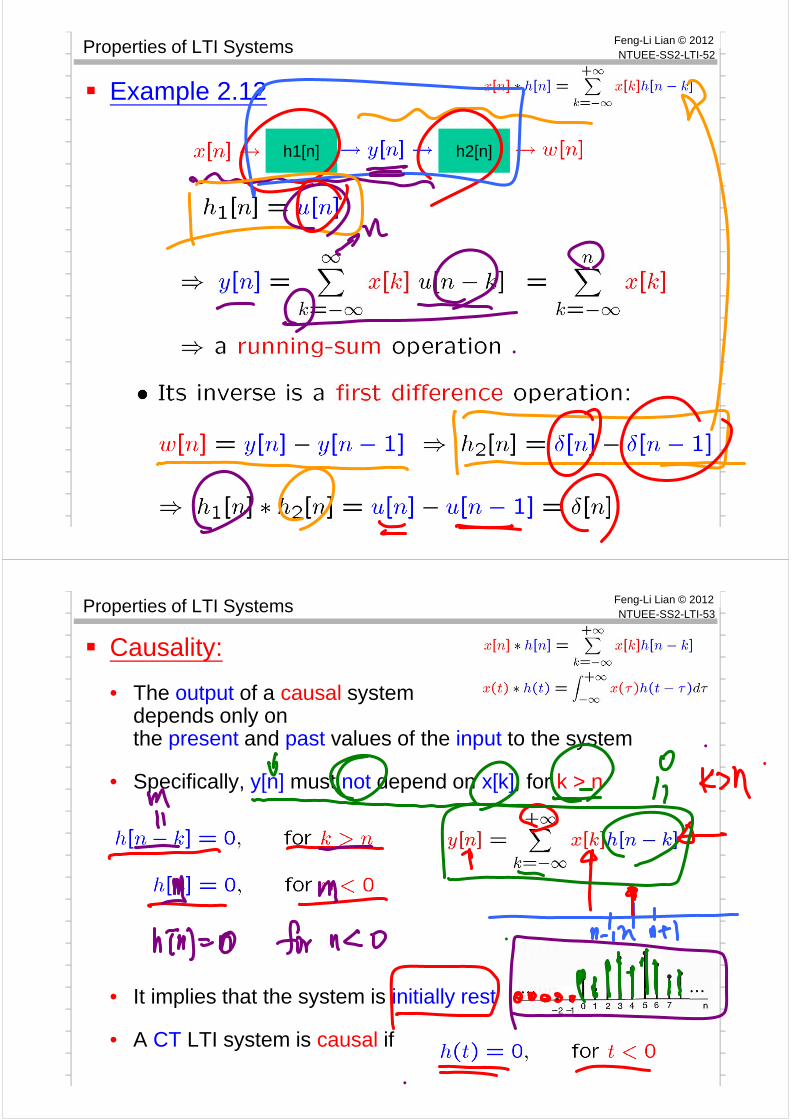
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-52Properties of LTI Systems
Example 2.12
h1[n] h2[n]
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-53Properties of LTI Systems
Causality:
• The output of a causal system depends only on the present and past values of the input to the system
• Specifically, y[n] must not depend on x[k], for k > n
• It implies that the system is initially rest
• A CT LTI system is causal if
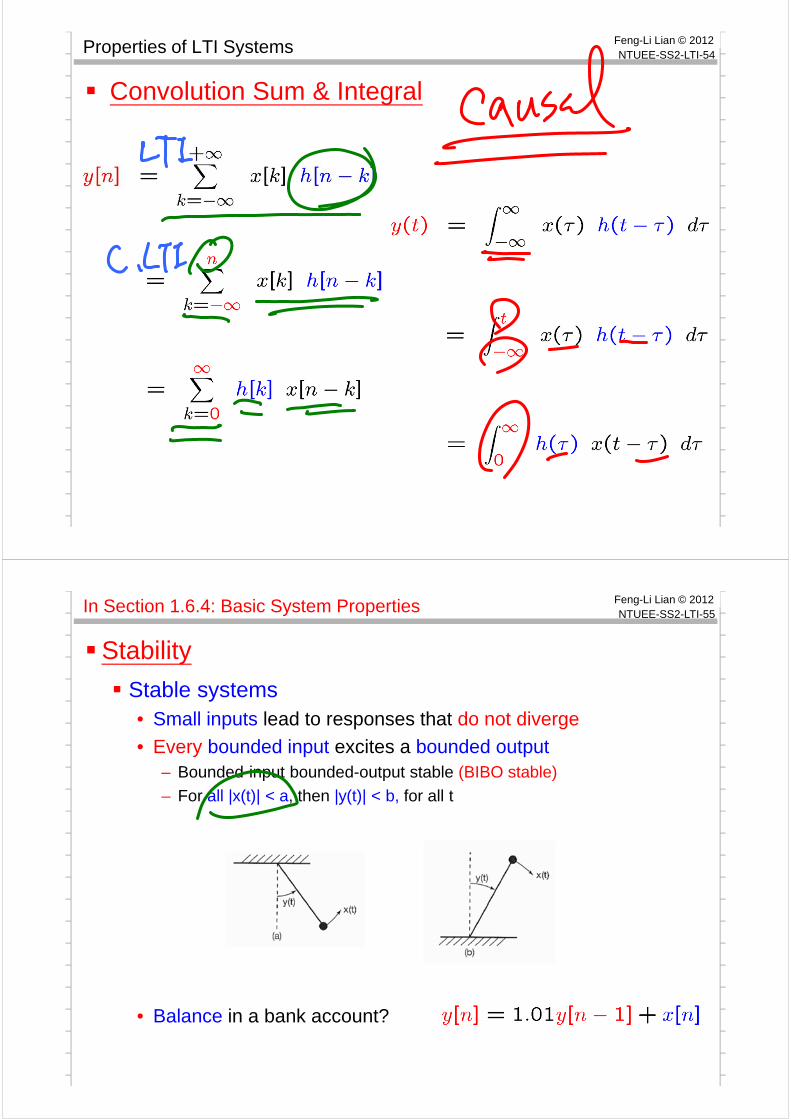
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-54Properties of LTI Systems
Convolution Sum & Integral
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-55In Section 1.6.4: Basic System Properties
Stability
Stable systems• Small inputs lead to responses that do not diverge
• Every bounded input excites a bounded output– Bounded-input bounded-output stable (BIBO stable)
– For all |x(t)| < a, then |y(t)| < b, for all t
• Balance in a bank account?
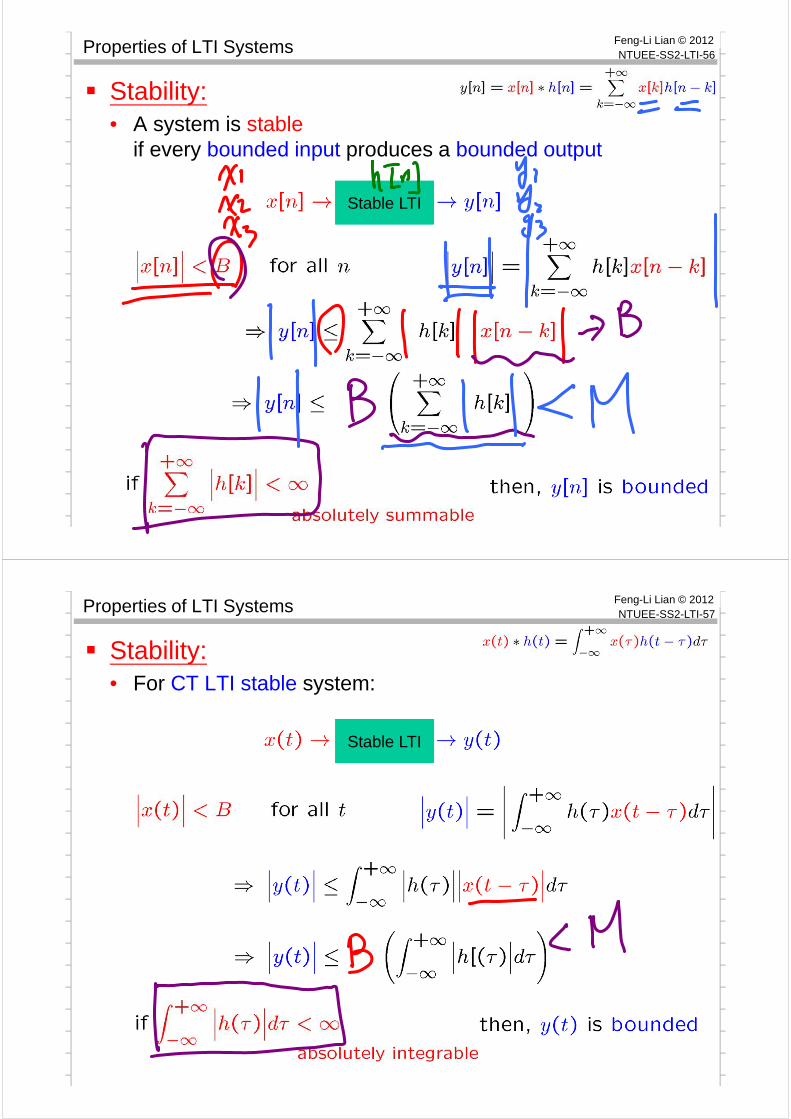
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-56Properties of LTI Systems
Stability:• A system is stable
if every bounded input produces a bounded output
Stable LTI
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-57Properties of LTI Systems
Stability:• For CT LTI stable system:
Stable LTI
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-58Properties of LTI Systems
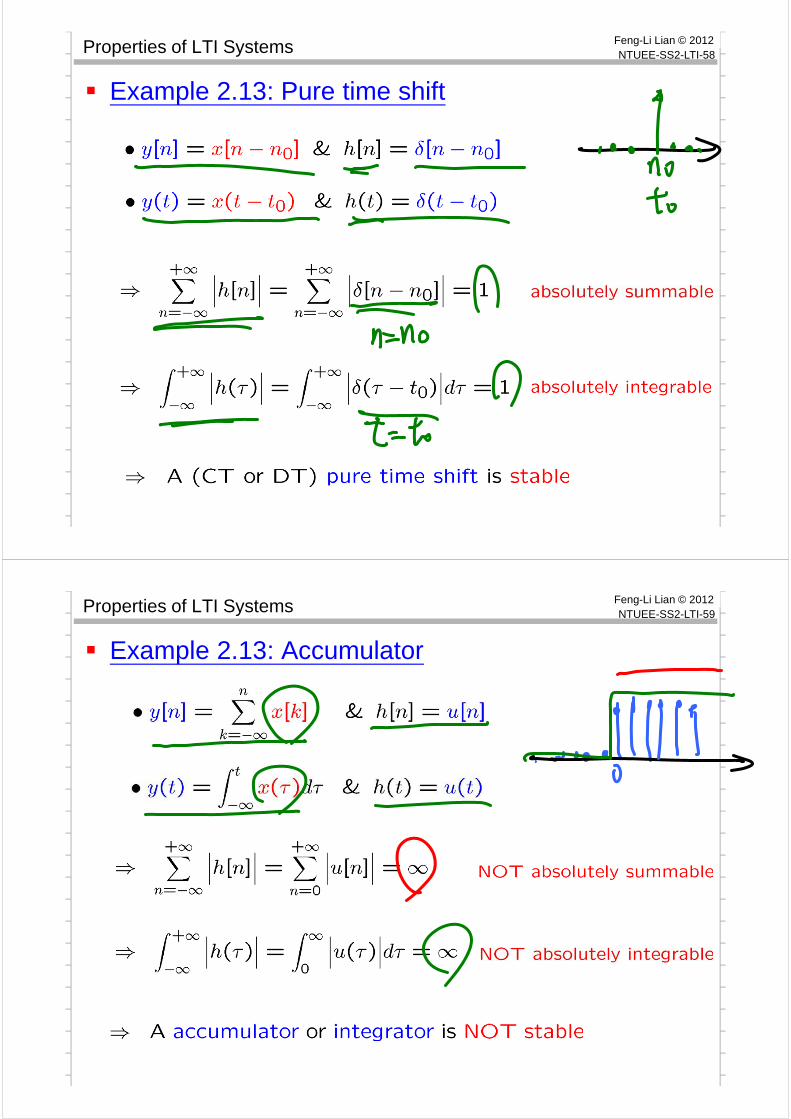
Example 2.13: Pure time shift
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-59Properties of LTI Systems
Example 2.13: Accumulator
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-60Properties of LTI Systems
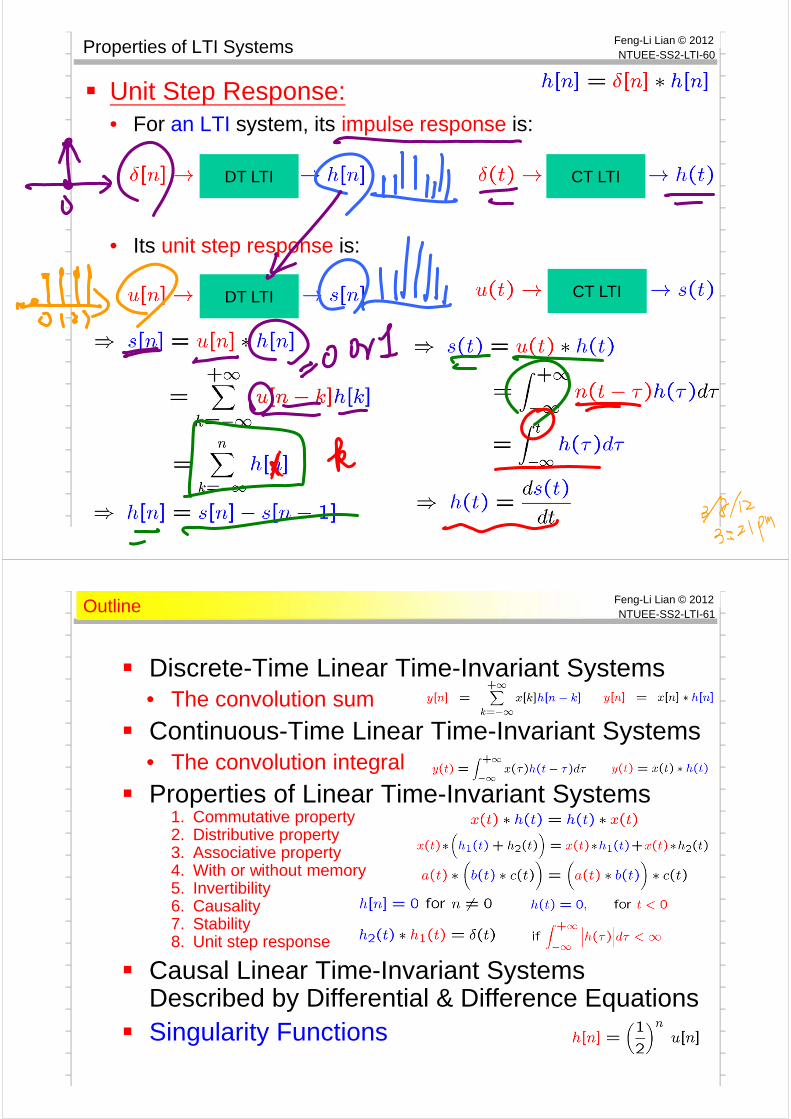
Unit Step Response:• For an LTI system, its impulse response is:
• Its unit step response is:
DT LTI CT LTI
DT LTI CT LTI
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-61Outline
Discrete-Time Linear Time-Invariant Systems• The convolution sum
Continuous-Time Linear Time-Invariant Systems• The convolution integral
Properties of Linear Time-Invariant Systems1. Commutative property2. Distributive property3. Associative property4. With or without memory5. Invertibility6. Causality7. Stability8. Unit step response
Causal Linear Time-Invariant Systems Described by Differential & Difference EquationsSingularity Functions
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-62Singularity Functions
Singularity Functions• CT unit impulse function is one of singularity functions
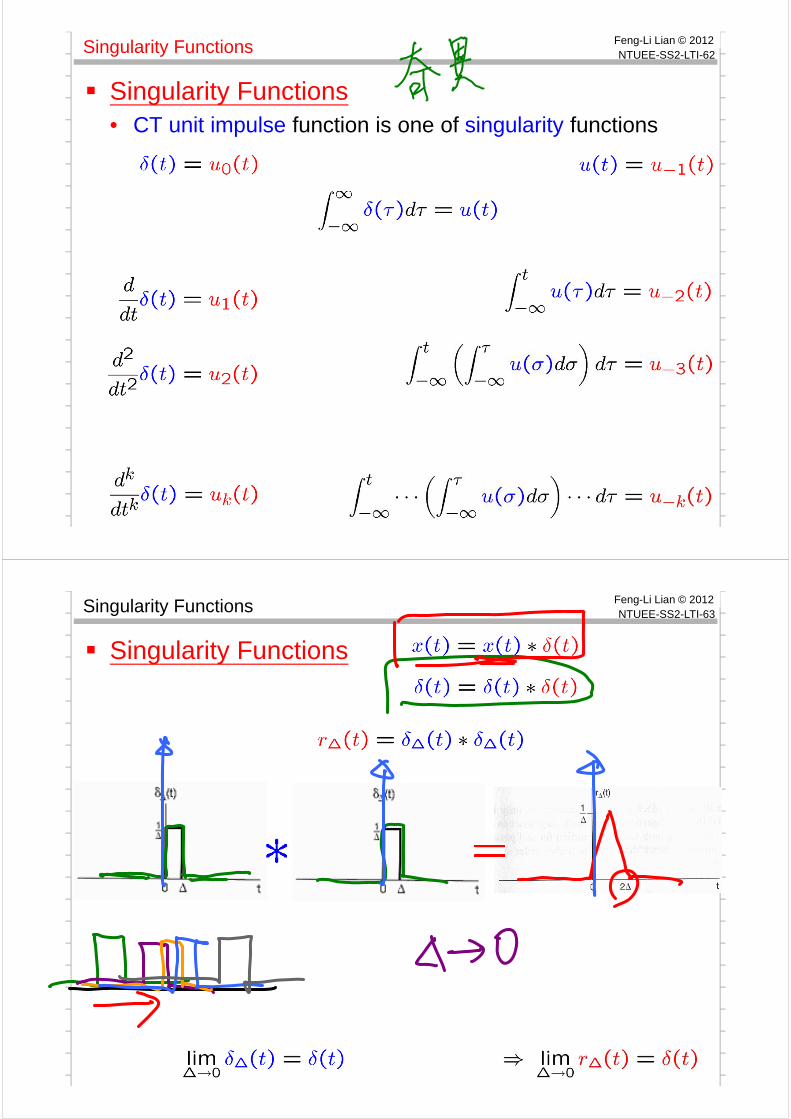
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-63Singularity Functions
Singularity Functions

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-64Singularity Functions
Example 2.16
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-65Singularity Functions
Example 2.16
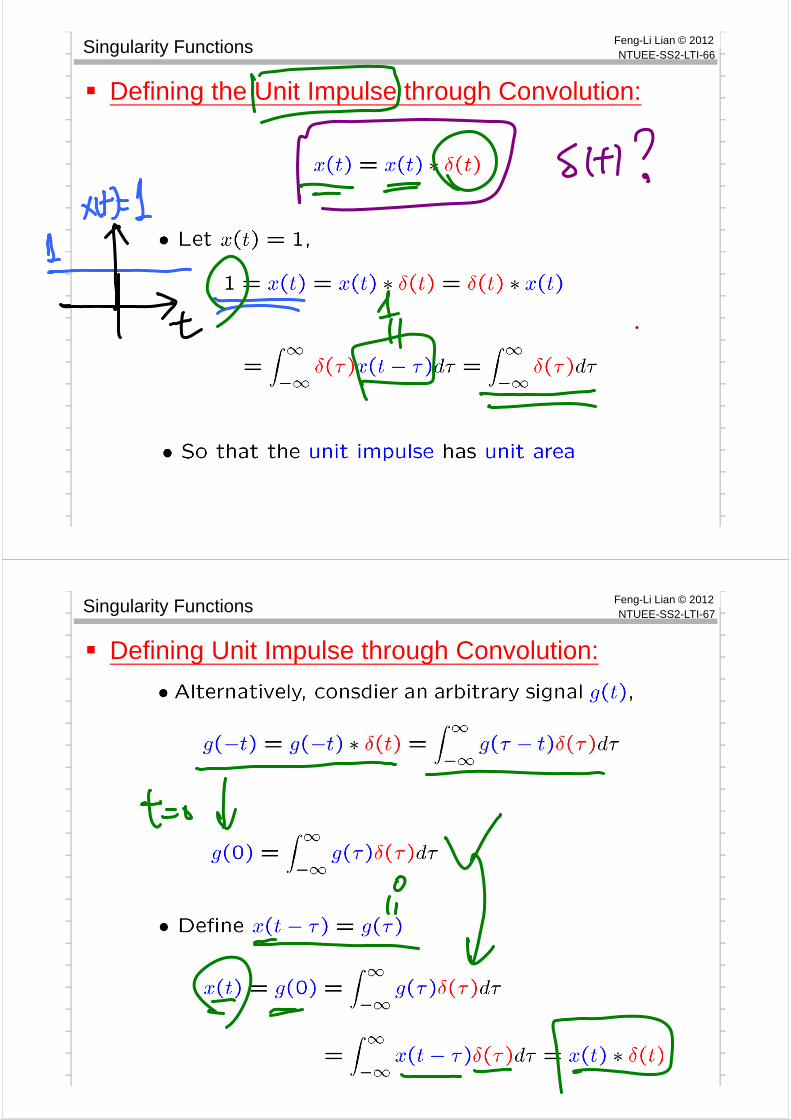
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-66Singularity Functions
Defining the Unit Impulse through Convolution:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-67Singularity Functions
Defining Unit Impulse through Convolution:
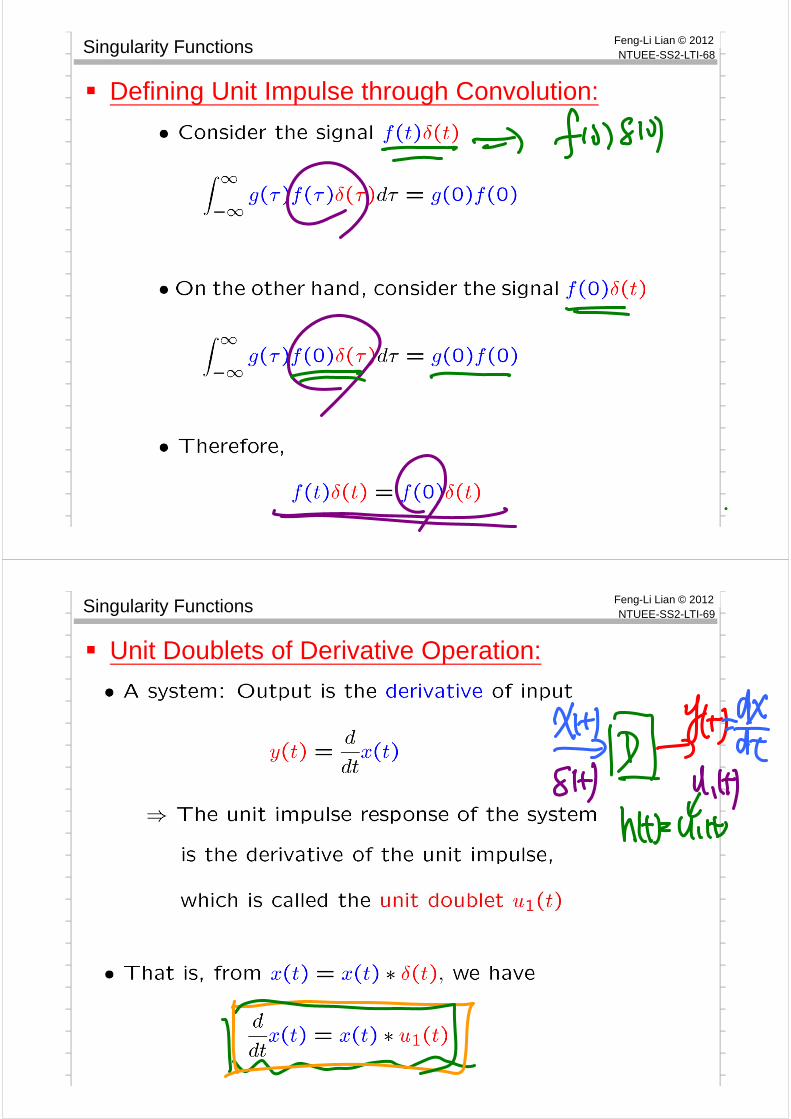
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-68Singularity Functions
Defining Unit Impulse through Convolution:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-69Singularity Functions
Unit Doublets of Derivative Operation:
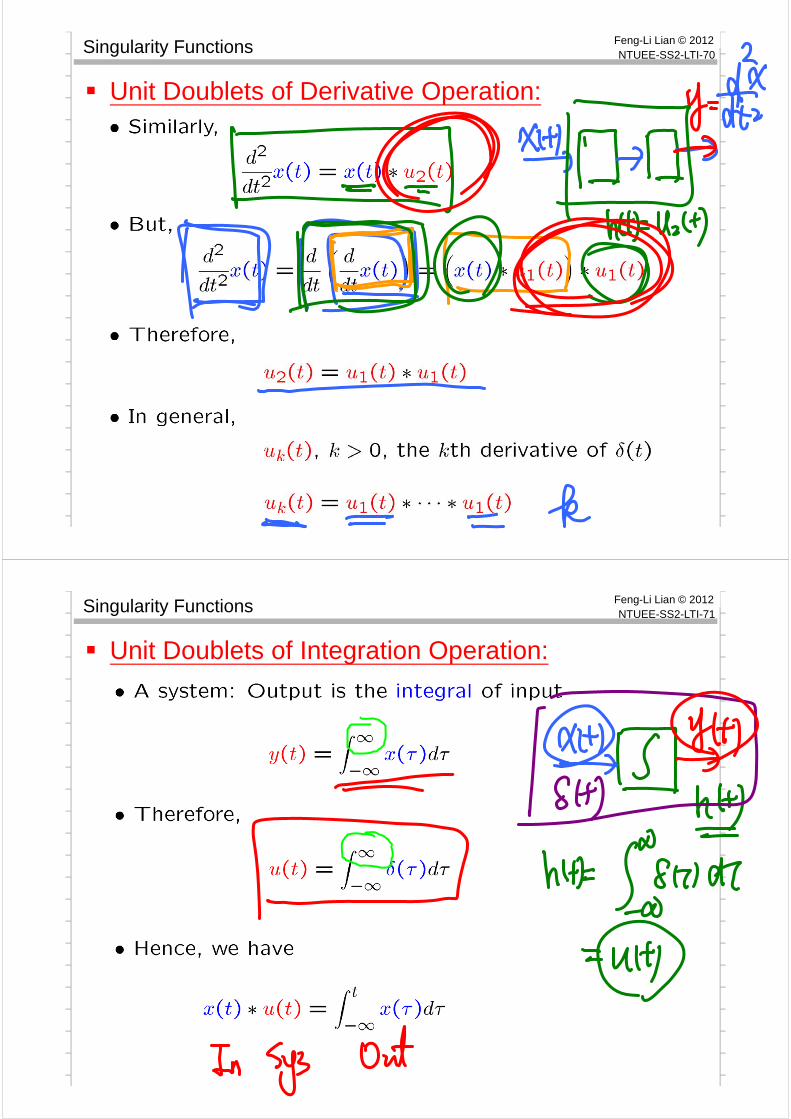
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-70Singularity Functions
Unit Doublets of Derivative Operation:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-71Singularity Functions
Unit Doublets of Integration Operation:
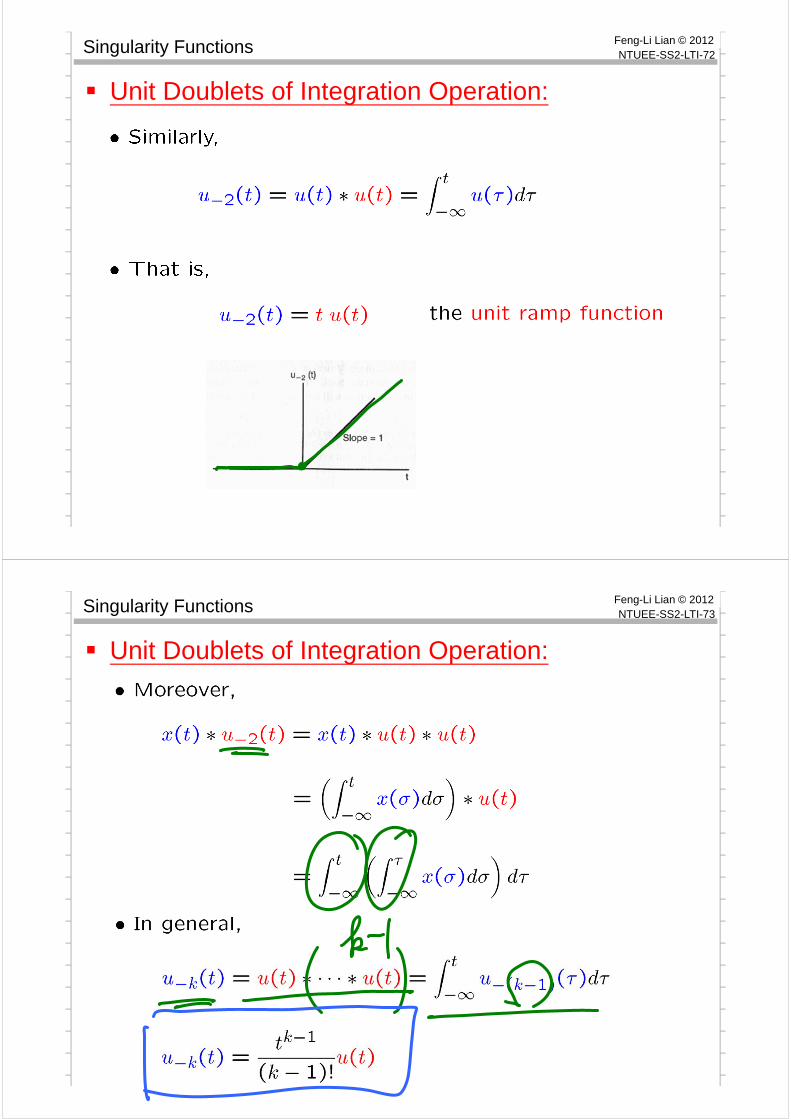
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-72Singularity Functions
Unit Doublets of Integration Operation:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-73Singularity Functions
Unit Doublets of Integration Operation:

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-74Singularity Functions
In Summary
…
…
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-75Outline
Discrete-Time Linear Time-Invariant Systems• The convolution sum
Continuous-Time Linear Time-Invariant Systems• The convolution integral
Properties of Linear Time-Invariant Systems1. Commutative property2. Distributive property3. Associative property4. With or without memory5. Invertibility6. Causality7. Stability8. Unit step response
Causal Linear Time-Invariant Systems Described by Differential & Difference EquationsSingularity Functions
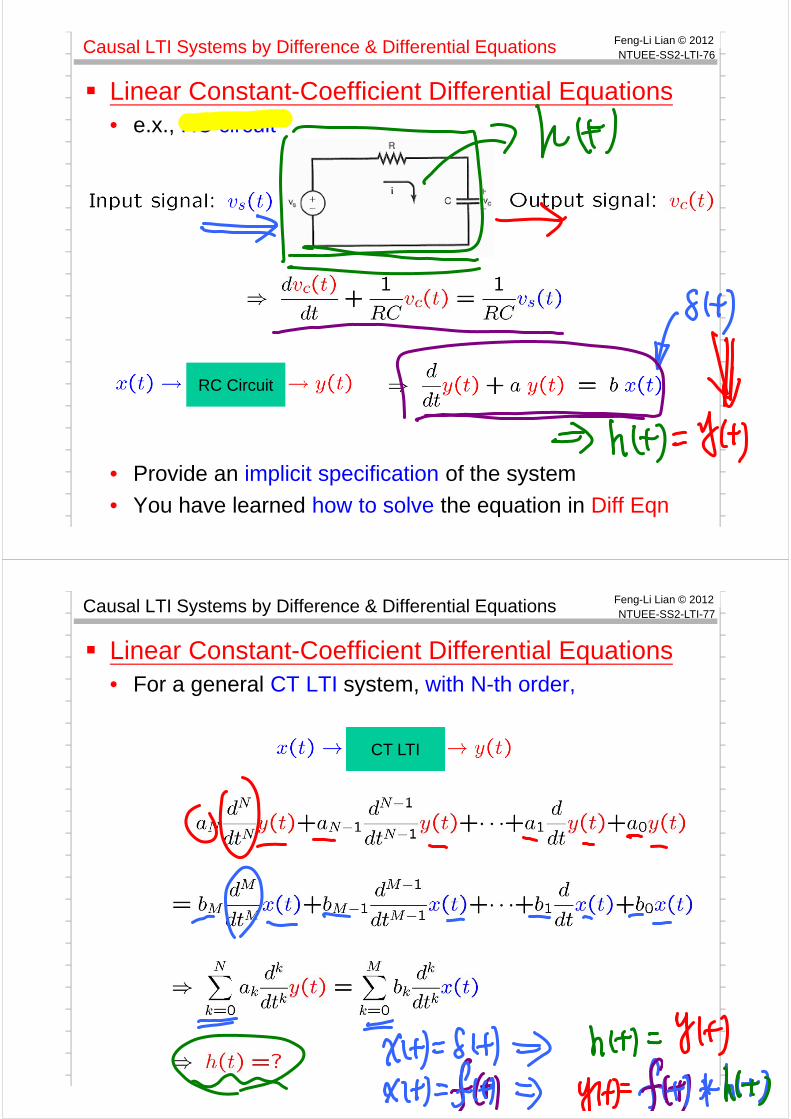
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-76Causal LTI Systems by Difference & Differential Equations
Linear Constant-Coefficient Differential Equations• e.x., RC circuit
• Provide an implicit specification of the system
• You have learned how to solve the equation in Diff Eqn
RC Circuit
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-77Causal LTI Systems by Difference & Differential Equations
Linear Constant-Coefficient Differential Equations• For a general CT LTI system, with N-th order,
CT LTI
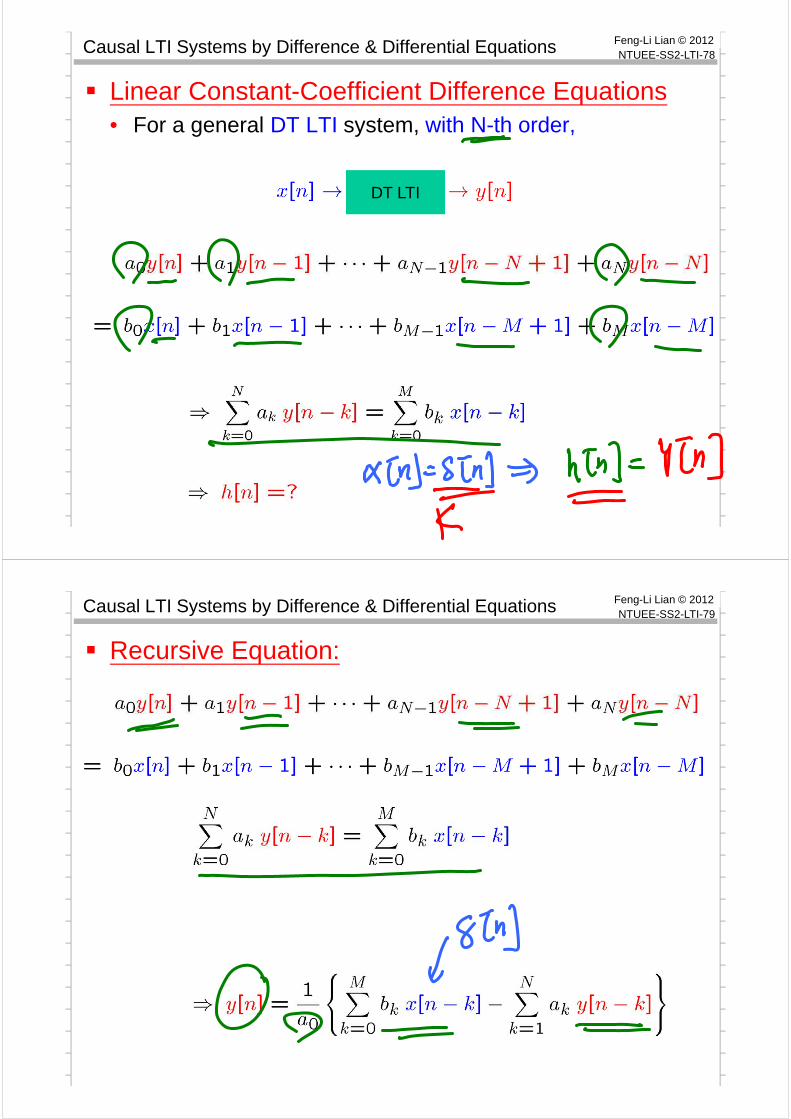
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-78Causal LTI Systems by Difference & Differential Equations
Linear Constant-Coefficient Difference Equations• For a general DT LTI system, with N-th order,
DT LTI
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-79Causal LTI Systems by Difference & Differential Equations
Recursive Equation:
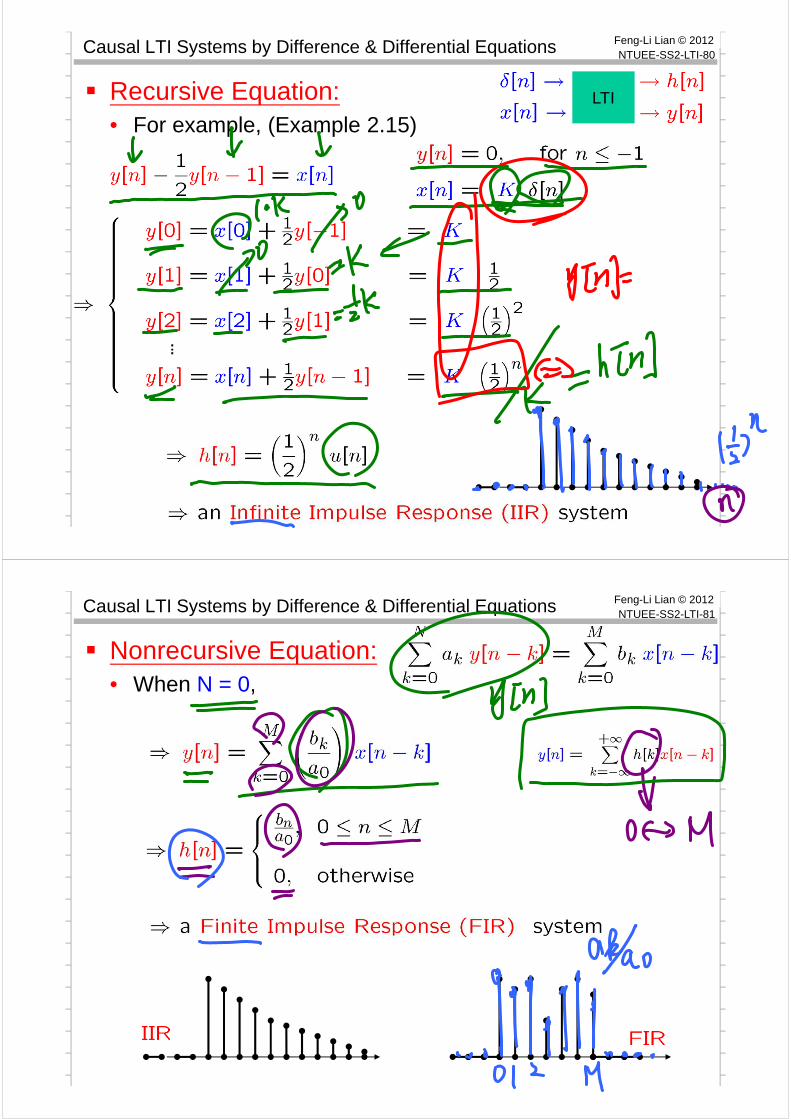
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-80Causal LTI Systems by Difference & Differential Equations
Recursive Equation:• For example, (Example 2.15)
LTI
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-81Causal LTI Systems by Difference & Differential Equations
Nonrecursive Equation:• When N = 0,
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-82Causal LTI Systems by Difference & Differential Equations
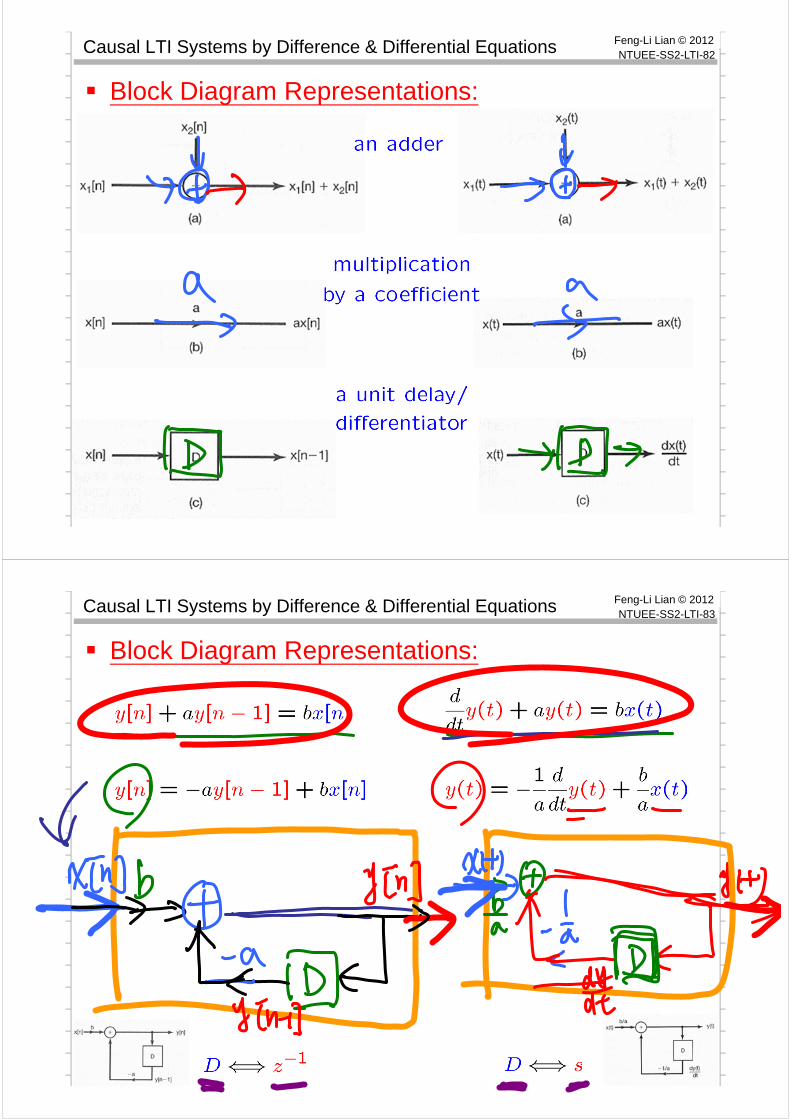
Block Diagram Representations:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-83Causal LTI Systems by Difference & Differential Equations
Block Diagram Representations:

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-84Causal LTI Systems by Difference & Differential Equations
Block Diagram Representations:
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-85Causal LTI Systems by Difference & Differential Equations
Block Diagram Representations:
Example 9.30 (pp.711)
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-86Causal LTI Systems by Difference & Differential Equations
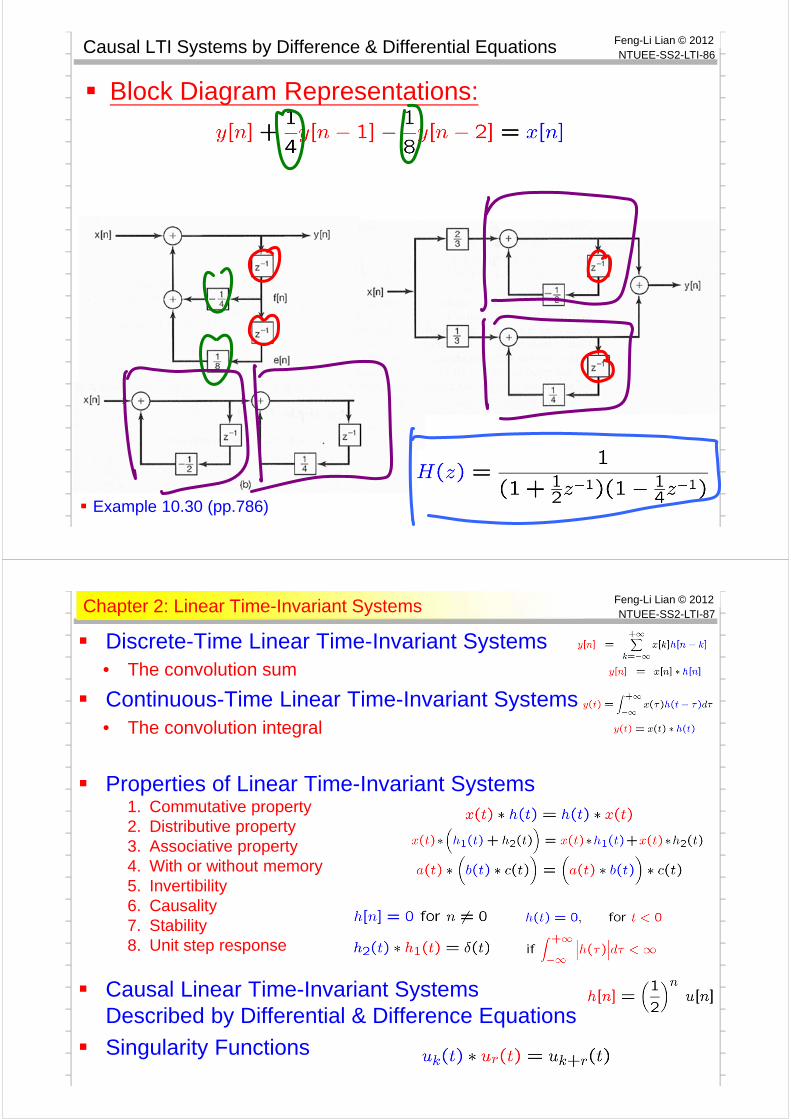
Block Diagram Representations:
Example 10.30 (pp.786)
Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-87Chapter 2: Linear Time-Invariant Systems
Discrete-Time Linear Time-Invariant Systems• The convolution sum
Continuous-Time Linear Time-Invariant Systems• The convolution integral
Properties of Linear Time-Invariant Systems1. Commutative property2. Distributive property3. Associative property4. With or without memory5. Invertibility6. Causality7. Stability8. Unit step response
Causal Linear Time-Invariant Systems Described by Differential & Difference Equations
Singularity Functions

Feng-Li Lian © 2011Feng-Li Lian © 2012NTUEE-SS2-LTI-88
Periodic Aperiodic
FSCT
DT(Chap 3)
FTDT
CT (Chap 4)
(Chap 5)
Bounded/Convergent
LT
zT DT
Time-Frequency
(Chap 9)
(Chap 10)
Unbounded/Non-convergent
CT
CT-DT
Communication
Control
(Chap 6)
(Chap 7)
(Chap 8)
(Chap 11)
Signals & Systems LTI & Convolution(Chap 1) (Chap 2)
Flowchart

![Continuous Time Signals & Systems: Part Ieeweb.poly.edu/~yao/EE3054/Chap9.1_9.5.pdf · Signals and Systems Continuous Time Signals & Systems: Part I Yao Wang ... DISCRETE-TIME: x[n]](https://img.pdfslide.tips/doc/110x75/5b8493d97f8b9ae0498c7b9d/continuous-time-signals-systems-part-yaoee3054chap9195pdf-signals-and.jpg)