Embed Size (px)
Citation preview

Sterowanie Napędów Maszyn i Robotów
Wykład 4b - Model silnika elektrycznego prądu stałego z magnesemtrwałym
dr inż. Jakub Możaryn
Instytut Automatyki i Robotyki
Warszawa, 2016
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Wstęp
Silniki elektryczne prądu stałego są bardzo często stosowanymielementami wykonawczymi w układach regulacji.
Zalety:
duży moment obrotowy,
dobra sprawność,
małe wymiary.
Wady:
iskrzenie (zakłócenia przemysłowe),
zużywanie się szczotek komutatora.
W ciągu ostatnich kilkudziesięciu lat wprowadzono na rynek szeregsilników prądu stałego o specjalnej konstrukcji, charakteryzujących siębardzo dobrymi właściwościami dynamicznymi.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika elektrycznego DC
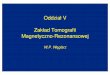
Rysunek : Schematyczna budowa silnika prądu stałego z magnesem trwałym
Moment obrotowy w silnikach elektrycznych powstaje na skutekoddziaływania między zewnętrznym polem magnetycznym, a polemmagnetycznym powstającym wokół przewodnika, przez który płynie prąd.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów
Budowa i działanie silnika elektrycznego DC
Rysunek : Schematyczna budowa silnika prądu stałego z magnesem trwałym
W silnikach prądu stałego małej mocy zewnętrzne pole magnetycznewytwarzane jest zazwyczaj przez magnesy trwałe, umieszczone wnieruchomej obudowie silnika zwanej stojanem.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów
Budowa i działanie silnika elektrycznego DC
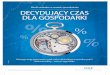
Rysunek : Schematyczna budowa silnika prądu stałego z magnesem trwałym
Znajdujący się w polu magnetycznym stojana wirnik zawiera uzwojeniaskładające się z wielu ramek przewodów połączonych z komutatorem.Zazwyczaj uzwojenia te nawinięte są na rdzeniu z materiałuferromagnetycznego. W wyniku współdziałania strumienia stojana i prąduprzepływającego w uzwojeniach wirnika powstaje moment obrotowy.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika elektrycznego DC
Rysunek : Schematyczna budowa silnika prądu stałego z magnesem trwałym
Aby moment obrotowy działający na wirnik był maksymalny, wektorystrumienia magnetycznego stojana i wirnika powinny być względem siebieprostopadłe. Zapewnia to komutator, który przełącza kolejne ramkiuzwojenia wirnika, powodując odpowiednie zmiany kierunkuprzepływającego prądu.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika elektrycznego DC
Rysunek : Schematyczna budowa silnika prądu stałego z magnesem trwałym
Napięcie zasilające komutator doprowadzane jest przez szczotki,wykonane ze specjalnie spreparowanego węgla. W silnikach tego typuobwodem sterowania jest zawsze obwód wirnika. Zmiany napięciazasilającego obwód sterowania wywołują zmiany momentu obrotowego atym samym, przy określonym momencie obciążenia wirnika, zmianęprędkości kątowej wirnika.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika elektrycznego DC
Rysunek : Schemat zastępczy silnika prądu stałego, sprowadzonego do obwoduwirnika
parametry elektryczne
Uz – napięcie zasilające wirnik, iw – prąd płynący w uzwojeniach wirnika,Rw – rezystancja zastępcza uzwojeń wirnika, Lw – indukcyjnośćzastępcza uzwojeń wirnika, E – siła elektromotoryczna indukcji, ωs –prędkość kątowa wirnika.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika elektrycznego DC
Rysunek : Schemat zastępczy silnika prądu stałego, sprowadzonego do obwoduwirnika
parametry mechaniczne
Ms – moment obrotowy wirnika, ωs – prędkość kątową wirnika, B –współczynnik tarcia lepkiego zredukowany do wału wirnika, J – momentbezwładności zredukowany do wału wirnika, iw – prąd płynący wuzwojeniach wirnika, Mobc – stały moment obciążenia silnika.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika elektrycznego DC
Tworząc model silnika należy zwrócić uwagę na znalezienie zależnościpomiędzy napięciem zasilającym silnik (Uz ) a prędkością kątową silnika(ωs).
Rozważając osobno elektryczne i mechaniczne parametry obwodu wirnikamożna napisać dwa równania modelujące jego działanie.
Na podstawie schematu zastępczego oraz II-go prawa Kirchhoffa możnanapisać równanie elektryczne silnika
Uz = URw + ULw + E (1)
Moment obrotowy wirnika, wykorzystywany do pokonania momentówprzeciwstawiających się jego ruchowi można zapisać jako
Ms = Ma + Mv + Mobc (2)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika DC - zależności elektryczne
Napięcie na rezystancji uzwojeń wirnika jest proporcjonalne do prąduprzez niego płynącego
URw = Rw iw (3)
Napięcie odniesione do indukcyjności wirnika jest proporcjonalne dozmian prądu przez nią płynącego (straty w obwodzie magnetycznymzostały tutaj pominięte)
ULw = Lwdiwdt
(4)
Gdy wirnik wykonuje ruch obrotowy, w jego uzwojeniach indukowana jestsiła elektromotoryczna indukcji (SEM), której wartość jestproporcjonalna do prędkości kątowej wirnika
E = keωs (5)
gdzie: ke – stała elektryczna, zależna m.in. od strumieniamagnetycznego stojana oraz liczby zwojów w uzwojeniach wirnika.
Podstawiając kolejne składowe napięcia Uz do równania (10), otrzymamy
Uz = Rw iw + Lwdiwdt
+ keωs (6)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika DC - zależności mechaniczne
Zakładając, że strumień magnetyczny stojana ma wartość stałą, momentobrotowy wirnika, proporcjonalny do prądu płynącego przez wirnik mapostać
Ms = kmiw (7)
gdzie km – stała mechaniczna, zależna m.in. od strumieniamagnetycznego stojana oraz liczby zwojów w uzwojeniach wirnika.
Moment związany z przyspieszeniem kątowym wirnika ma postać
Ma = Jdωs
dt(8)
Moment związany z oporami ruchu wirnika
Mv = Bωs (9)
Podstawiając kolejne składowe momentu Ms do równania (10)
kmiw = Jdωs
dt+ Bωs + Mobc (10)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Równanie dynamiki silnika DC
Układ równań wiążących zależności elektryczne i mechaniczne silnika DCUz = Rw iw + Lw
diwdt
+ keωs
kmiw = Jdωs
dt+ Bωs + Mobc
(11)
stosując przekształcenie Laplace’aUz (s) = Rw iw (s) + Lw iw (s)s + keωs(s)kmiw (s) = Jdωss + Bωs(s) + Mobc
(12)
a następnie iw (s) =
Uz (s)− keωs(s)
Rw + Lw s
iw (s) =Jωs(s)s + Bωs(s) + Mobc
km
(13)
czyliUz (s)− keωs(s)
Rw + Lw s=
Jωs(s)s + Bωs(s) + Mobc
km(14)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów
Równanie dynamiki silnika DC
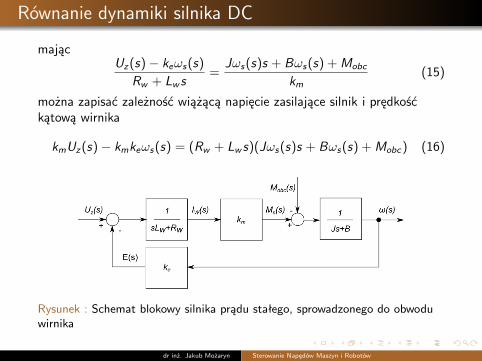
mającUz (s)− keωs(s)
Rw + Lw s=
Jωs(s)s + Bωs(s) + Mobc
km(15)
można zapisać zależność wiążącą napięcie zasilające silnik i prędkośćkątową wirnika
kmUz (s)− kmkeωs(s) = (Rw + Lw s)(Jωs(s)s + Bωs(s) + Mobc ) (16)
Rysunek : Schemat blokowy silnika prądu stałego, sprowadzonego do obwoduwirnika
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Równanie dynamiki silnika DC
Do wyznaczenia transmitancji silnika elektrycznego prądu stałego zmagnesem trwałym, należy przyjąć zerowe obciążenie, czyli:
Mobc = 0 (17)
co daje transmitancję operatorową postaci
G (s) =ωs
Us(s)=
km
LwJs2 + (RwJ + LwB)s + (kmke + RwB)(18)
Tak więc otrzymujemy układ liniowy, stacjonarny, mający charakterukładu oscylacyjnego.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Budowa i działanie silnika elektrycznego DC
Aby móc przeprowadzić numeryczną symulację działania silnika należyzdefiniować jego parametry (współczynniki i stałe).
Załóżmy, że:
Rw = 2 Ω,
J = 0.1kgm2
s2,
Lw = 0.1 H,
B = 0.5Nms
rad,
ke = 0.1V s
rad,
km = 0.1Nm
A,
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Opis w przestrzeni zmiennych stanu - zmienne fizykalne
Do zaprojektowania układu regulacji pozycji siłownika pneumatycznego,poszukiwany jest model dynamiki układu w postaci modelu wprzestrzeni stanów z czasem ciągłym
X (t) = AmcX (t) + BmcU(t)y(t) = CmcX (t) + DmcU(t)
(19)
gdzie: X (t) ∈ Rn - wektor stanu, U(t) ∈ Rm - wektor sygnałówsterujących, y(t) ∈ Rp - sygnał wyjściowy wyjście / wektor sygnałówwyjściowych, Amc ∈ Rn×n - macierz stanu Bmc ∈ Rn×m - macierzsterowania, Cmc ∈ Rp×m - macierz wyjścia.
Fizykalne zmienne stanu: minimalna liczba niezależnychzmiennych fizycznych.
Fazowe zmienne stanu: Zmienne stanu określone w ten sposób, żekolejna zmienna jest równa pochodnej poprzedniej. Wyznaczane przyzałożeniu jednowymiarowego, liniowego, stacjonarnego,ciągłego układu dynamicznego.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Opis w przestrzeni zmiennych stanu - zmienne fizykalne
Model fizykalnych zmiennych stanu, można wyznaczyć, na podstawieukładu równań wiążących zależności elektryczne i mechaniczne silnika DC
Uz = Rw iw + Lwdiwdt
+ keωs
kmiw = Jdωs
dt+ Bωs + Mobc
(20)
po przekształceniudiwdt
= − ke
Lwωs −
Rw
Lwiw +
1Lw
Uz
dωs
dt= −B
Jωs +
km
Jiw −
1JMobc
(21)
można przyjąć następujący wektor stanu i sterowań
Xfiz =
[iwωs
],Ufiz =
[Uz
Mobc
](22)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Opis w przestrzeni zmiennych stanu - zmienne fizykalne
Model zmiennych stanu z wykorzystaniem zmiennych fizykalnych, zwykorzystaniem wektora stanu i sterowań:
Xfiz =
[iwωs
],Ufiz =
[Uz
Mobc
](23)
jest następującyXfiz =
−Rw
Lw− ke
Lwkm
J−B
J
Xfiz +
1Lw
0
0 −1J
Ufiz
Y =[
0 1]Xfiz +
[0 0
]Ufiz
(24)
Xfiz = AfizXfiz + BfizUfiz
Y = CfizXfiz + DfizUfiz(25)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Opis w przestrzeni zmiennych stanu - zmienne fazowe
Mając transmitancję operatorową postaci
G (s) =ωs
Us(s)=
km
LwJs2 + (RwJ + LwB)s + (kmke + RwB)(26)
stosując następujące podstawienia
kω20 =km
LwJ, 2ξω0 =
RwJ + LwB
LwJ, ω20 =
kmke + RwB
LwJ(27)
można ją zapisać w postaci transmitancji układu oscylacyjnego
G (s) =Y (s)
U(s)=
k
T 2s2 + 2ξTs + 1(28)
G (s) =Y (s)
U(s)=
kω20s2 + 2ξω0s + ω20
(29)
gdzie: 0 < ξ < 1 - współczynnik tłumienia, ω0 - pulsacja drgańnietłumionych.
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Opis w przestrzeni zmiennych stanu - zmienne fazowe
Opis elementu oscylacyjnego w postaci transmitancji operatorowej
G (s) =kω20
s2 + 2ξω0s + ω20(30)
Układ ten jest opisany równaniem 2-go rzędu, więc wymaga q = 2zmiennych stanu, definiujących stan układu w dowolnej chwili czasu.
Korzystając z metody bezpośredniej otrzymuje się następującerównania stanu
x1(t) = x2(t)x2(t) = −ω20x1(t)− 2ξω0x2(t) + u(t)
(31)
równanie wyjściay(t) = kω0x1(t) (32)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Opis w przestrzeni zmiennych stanu - zmienne fazowe
Model zmiennych stanu z wykorzystaniem zmiennych fazowych:
Xfaz =
[x1x2
],Ufaz = Uz (33)
jest następujący Xfaz =
[0 1−ω20 −2ξω20
]Xfaz +
[01
]Ufaz
Y =[kω20 0
]Xfaz + [0]Ufaz
(34)
˙Xfaz = Afaz (t)Xfaz + Bfaz (t)Ufaz (t)
Y = CfazXfaz + DfazUfaz(35)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Człon oscylacyjny - właściwości
Transmitancja operatorowa
G (s) =Y (s)
U(s)=
k
T 2s2 + 2ξTs + 1(36)
G (s) =Y (s)
U(s)=
kω20s2 + 2ξω0s + ω20
(37)
Odpowiedź skokowa
y(t) = L−1[ust
1s
kω20s2 + 2ξω0s + ω0
]= kust
[1− 1√
1− ξ2e−ξω0t sinω0
√1− ξ2t + φ
] (38)
φ = arctg
√1− ξ2ξ
(39)
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Człon oscylacyjny - właściwości
Rysunek : Odpowiedź skokowa członu oscylacyjnego
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Człon oscylacyjny - właściwości
Transmitancja widmowa
G (jω) =kω20[(ω
20 − ω2)− j2ξω0ω]
(ω20 − ω2)2 + (2ξω0ω)2(40)
Rysunek : Charakterystyka amplitudowo-fazowa
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Człon oscylacyjny
Transmitancja widmowa
G(jω) =kω20 [(ω
20 − ω
2)− j2ξω0ω]
(ω20 − ω2)2 + (2ξω0ω)2(41)
P(jω) =kω20 [(ω
20 − ω
2)]
(ω20 − ω2)2 + (2ξω0ω)2(42)
Q(jω) = −k[2ξω30ω]
(ω20 − ω2)2 + (2ξω0ω)2(43)
Rysunek : Logarytmicznecharakterystyki amplitudowa i fazowa
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów

Sterowanie Napędów Maszyn i Robotów
Wykład 4b - Model silnika elektrycznego prądu stałego z magnesemtrwałym
dr inż. Jakub Możaryn
Instytut Automatyki i Robotyki
Warszawa, 2016
dr inż. Jakub Możaryn Sterowanie Napędów Maszyn i Robotów