Embed Size (px)
Citation preview
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 1 dari 24
♦ Tanggapan Waktu Alih Orde Tinggi
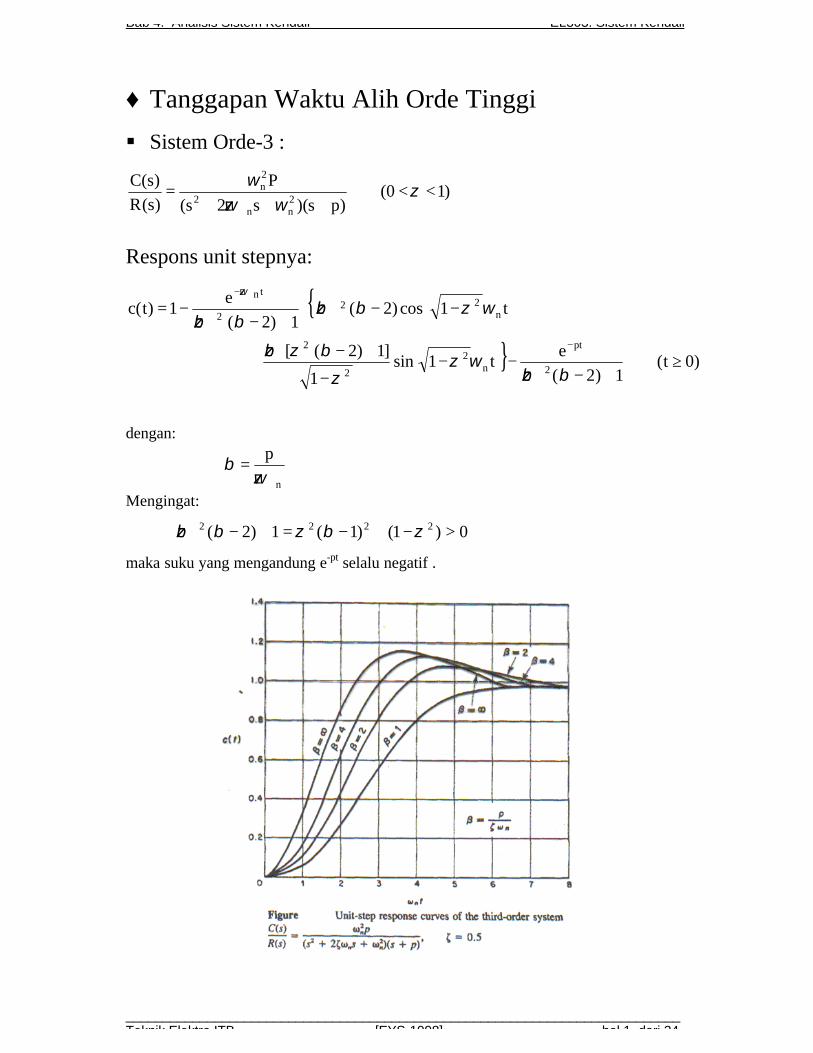
§ Sistem Orde-3 :
)10()ps)(s2s(
P
)s(R
)s(C2nn
2
2n <<
+++= ζ
ωζωω
Respons unit stepnya:
{} )0t(
1)2(
et1sin
1
]1)2([
t1cos)2(1)2(
e1)t(c
2
pt
n2
2
2
n22
2
tn
≥+−
−−−
+−+
−−+−
−=
−
−
ββζωζ
ζβζβζ
ωζββζββζ
ζω
dengan:
n
p
ζωβ =
Mengingat:
0)1()1(1)2( 2222 >−+−=+− ζβζββζ
maka suku yang mengandung e-pt selalu negatif .
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 2 dari 24
Respons Transient Sistem Orde Tinggi:
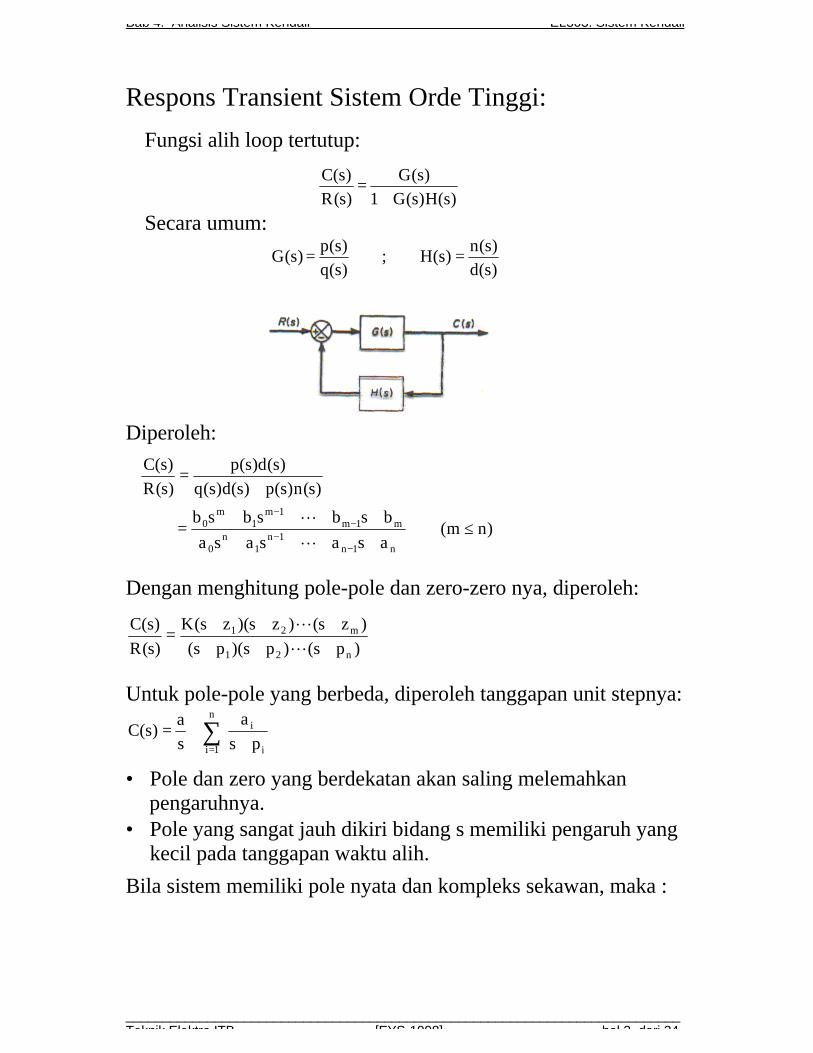
Fungsi alih loop tertutup:
)s(H)s(G1)s(G
)s(R)s(C
+=
Secara umum:
)s(d)s(n
)s(H;)s(q)s(p
)s(G ==
Diperoleh:
)nm(asasasa
bsbsbsb
)s(n)s(p)s(d)s(q
)s(d)s(p
)s(R
)s(C
n1n1n
1n
0
m1m1m
1m
0 ≤++++++++
=
+=
−−
−−
L
L
Dengan menghitung pole-pole dan zero-zero nya, diperoleh:
)ps()ps)(ps(
)zs()zs)(zs(K
)s(R
)s(C
n21
m21
++++++
=L
L
Untuk pole-pole yang berbeda, diperoleh tanggapan unit stepnya:
∑= +
+=n
1i i
i
ps
a
s
a)s(C
• Pole dan zero yang berdekatan akan saling melemahkanpengaruhnya.
• Pole yang sangat jauh dikiri bidang s memiliki pengaruh yangkecil pada tanggapan waktu alih.
Bila sistem memiliki pole nyata dan kompleks sekawan, maka :

Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 3 dari 24
∏ ∏
∏
= =
=
+++
+=
q
1j
r
1k
2kkk
2j
m
1ii
)s2s()ps(s
)zs(K
)s(C
ωωζ
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 4 dari 24
Bila semua pole-polenya berbeda, maka:
∑ ∑= = ++
−+++
++=
q
1j
r
1k2kkk
2
2kkkkkk
j
j
s2s
1c)s(b
ps
a
sa
)s(Cωωζ
ζωωζ
Dalam domain waktu :
)0t(t1sinec
t1cosebeaa)t(c
2kk
r
1k
ktkk
2kk
r
1k
ktkk
q
1j
pjtj
≥−+
−++=
∑
∑∑
=
−
=
−
=
−
ζω
ζω
ωζ
ωζ
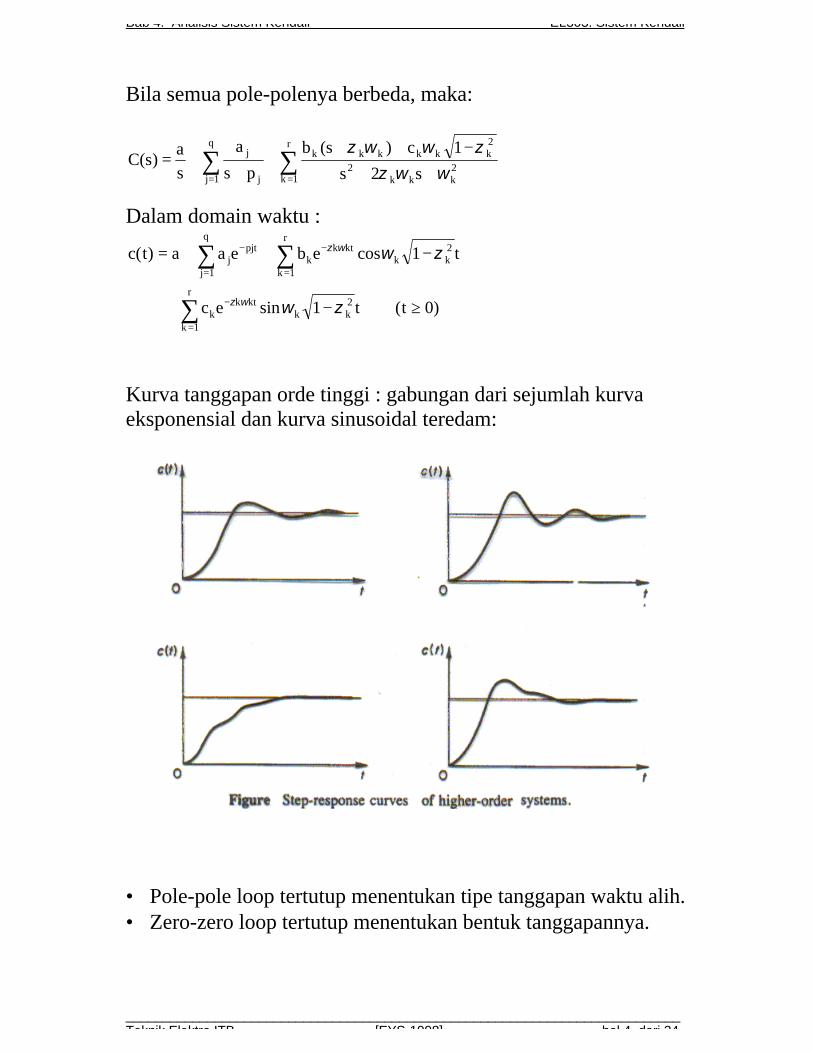
Kurva tanggapan orde tinggi : gabungan dari sejumlah kurvaeksponensial dan kurva sinusoidal teredam:
• Pole-pole loop tertutup menentukan tipe tanggapan waktu alih.• Zero-zero loop tertutup menentukan bentuk tanggapannya.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 5 dari 24
♦ Pole-pole Loop Tertutup Dominan:
• Orde tinggi seringkali didekati dengan orde-2 untuk
memudahkan analisis.
• Pendekatan ini dapat dilakukan bila ada sepasang pole
dominan terhadap pole-ple lainnya.
• Suatu pole A disebut dominan terhadap pole B bila
perbandingan bagian real nya minimal 1 : 5 dan tak ada zero
didekatnya.
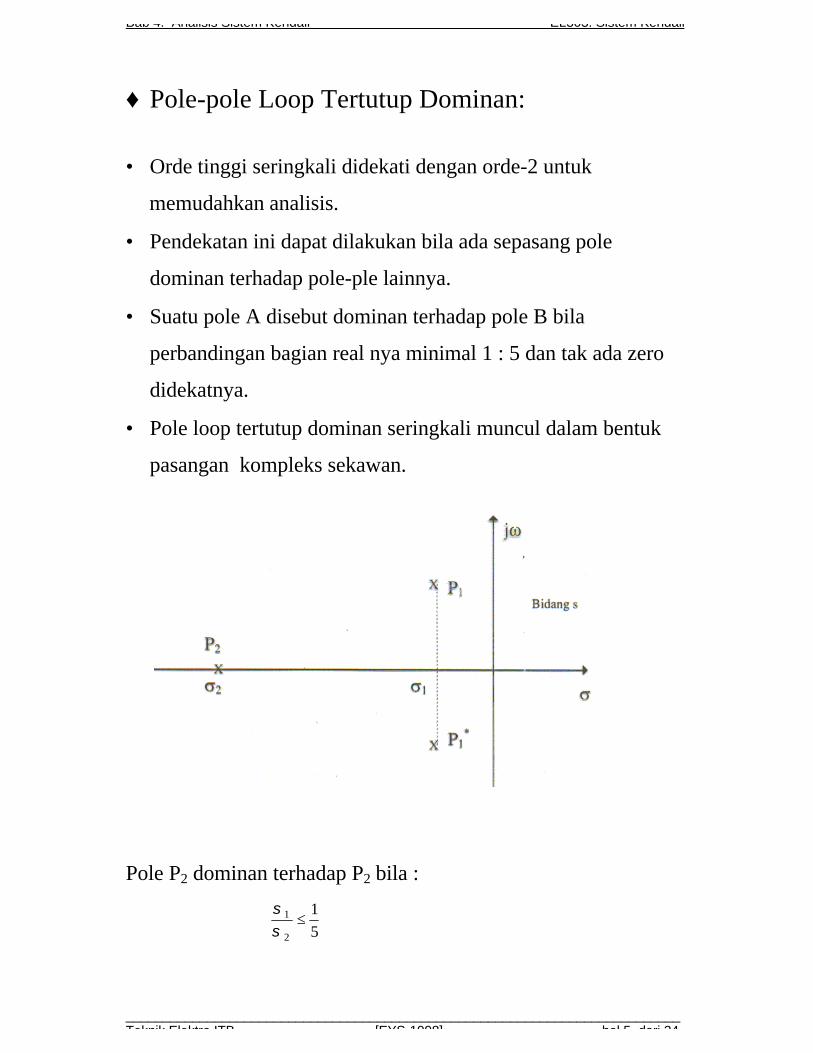
• Pole loop tertutup dominan seringkali muncul dalam bentuk
pasangan kompleks sekawan.
Pole P2 dominan terhadap P2 bila :
5
1
2
1 ≤σσ
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 6 dari 24
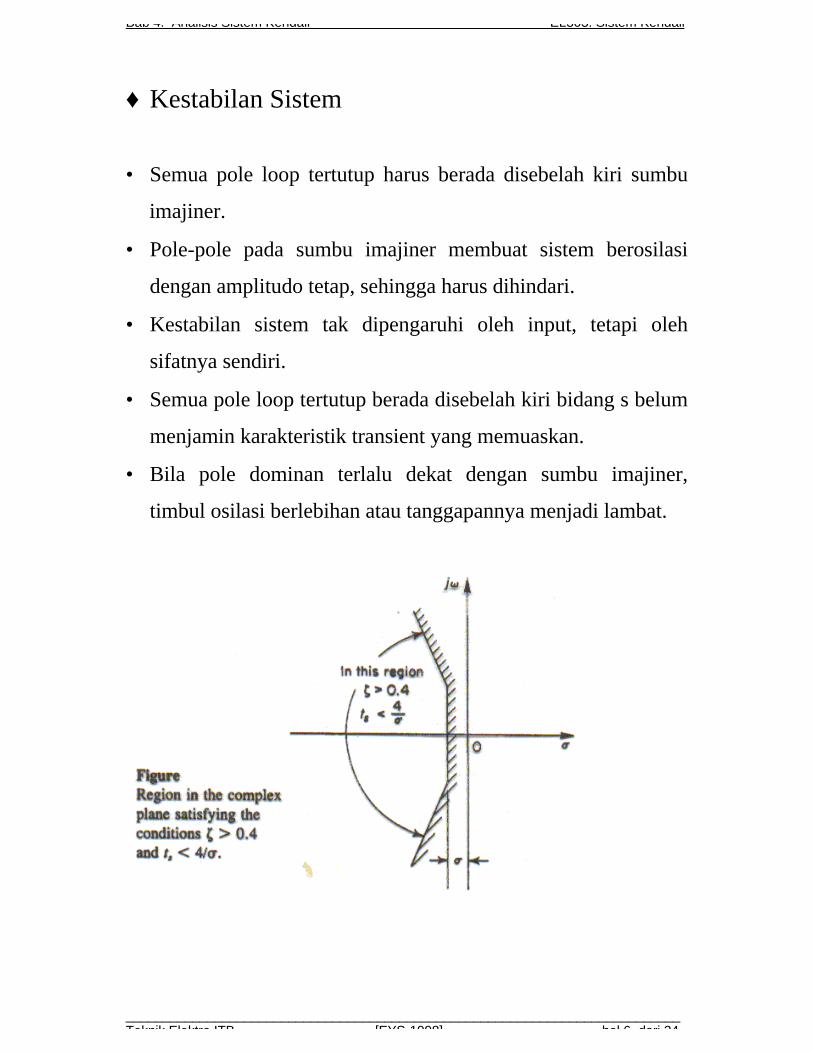
♦ Kestabilan Sistem
• Semua pole loop tertutup harus berada disebelah kiri sumbu
imajiner.
• Pole-pole pada sumbu imajiner membuat sistem berosilasi
dengan amplitudo tetap, sehingga harus dihindari.
• Kestabilan sistem tak dipengaruhi oleh input, tetapi oleh
sifatnya sendiri.
• Semua pole loop tertutup berada disebelah kiri bidang s belum
menjamin karakteristik transient yang memuaskan.
• Bila pole dominan terlalu dekat dengan sumbu imajiner,
timbul osilasi berlebihan atau tanggapannya menjadi lambat.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 7 dari 24
o ANALISIS GALAT KEADAAN TUNAK
§ Setiap sistem kendali memiliki galat keadaan tunak
untuk jenis input tertentu..
§ Suatu sistem yang tak memiliki galat untuk input step,
mungkin memiliki galat untuk input ramp.
§ Galat ini tergantung pada tipe (fungsi alih loop terbuka)
sistem ybs.
♦ Klasifikasi Sistem Kendali
§ Sistem kendali dapat dikelompokkan terhadap
kemampuannya untuk mengikuti input step, ramp, parabola,
dst.
§ Input sebenarnya pada sistem seringkali merupakan
kombinasi input-input tersebut.
§ Besarnya galat terhadap setiap jenis input tersebut
merupakan indikator kebaikan (goodness) sistem tersebut.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 8 dari 24
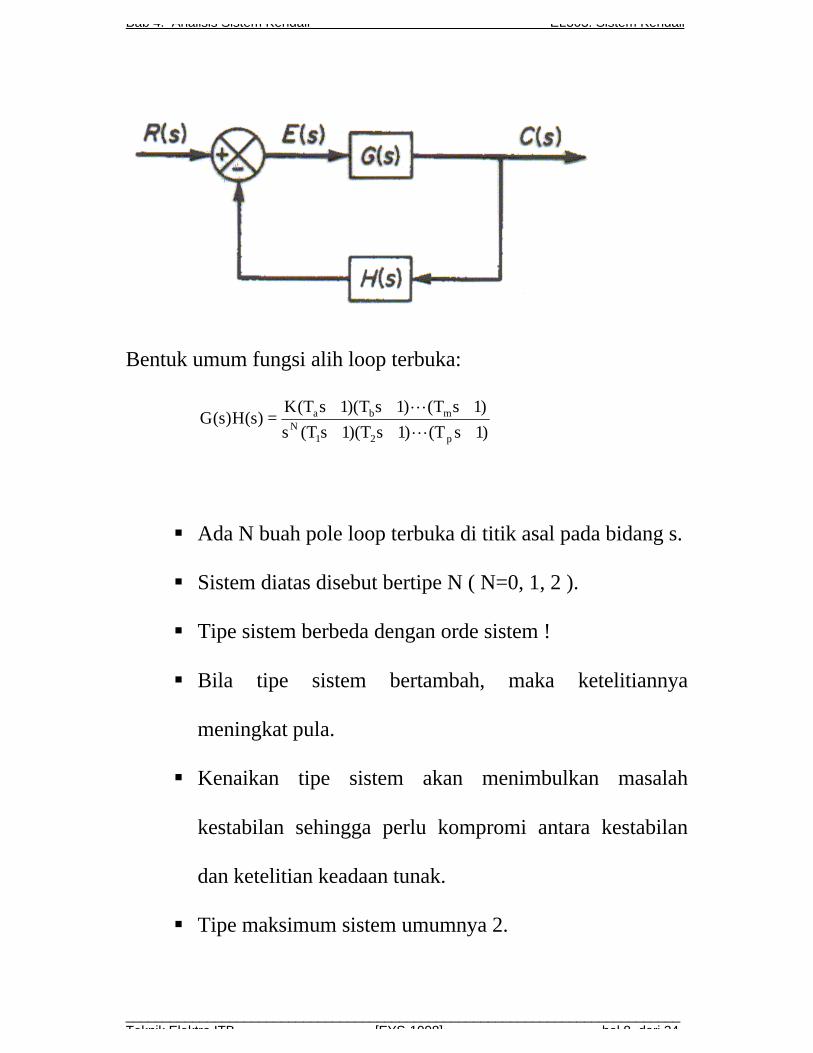
Bentuk umum fungsi alih loop terbuka:
)1sT()1sT)(1sT(s
)1sT()1sT)(1sT(K)s(H)s(G
p21N
mba
++++++
=L
L
§ Ada N buah pole loop terbuka di titik asal pada bidang s.
§ Sistem diatas disebut bertipe N ( N=0, 1, 2 ).
§ Tipe sistem berbeda dengan orde sistem !
§ Bila tipe sistem bertambah, maka ketelitiannya
meningkat pula.
§ Kenaikan tipe sistem akan menimbulkan masalah
kestabilan sehingga perlu kompromi antara kestabilan
dan ketelitian keadaan tunak.
§ Tipe maksimum sistem umumnya 2.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 9 dari 24
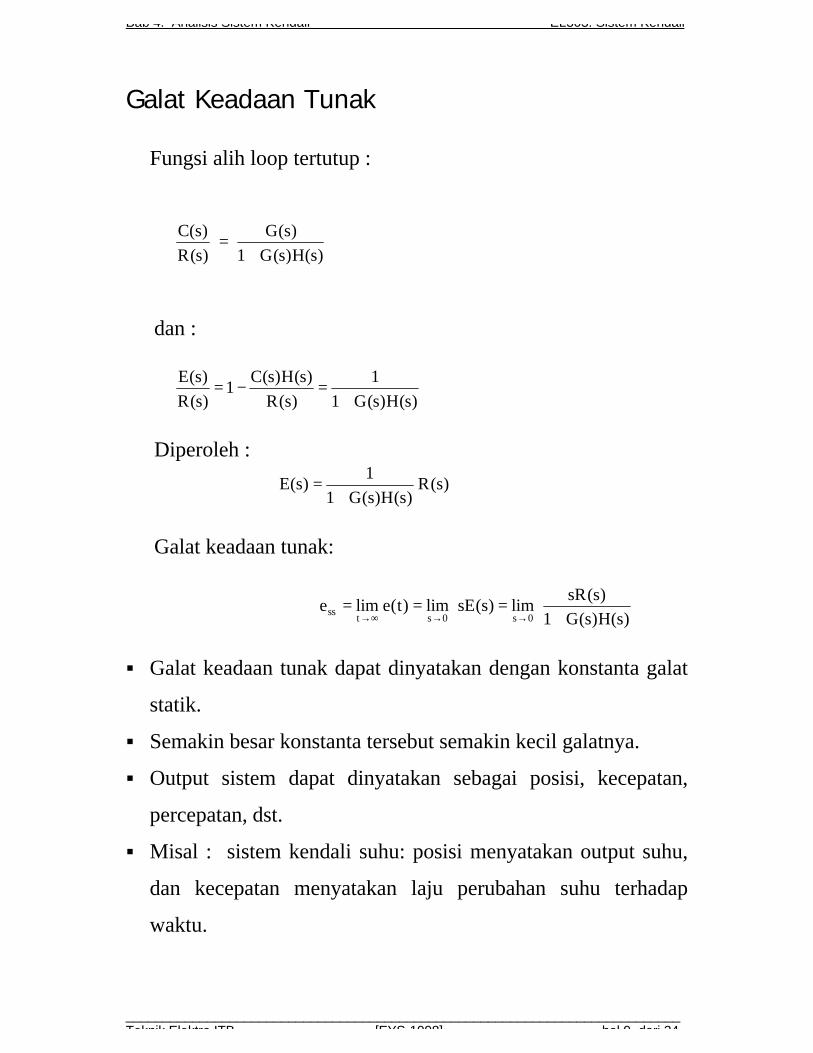
Galat Keadaan Tunak
Fungsi alih loop tertutup :
)s(H)s(G1
)s(G
)s(R
)s(C
+=
dan :
)s(H)s(G1
1
)s(R
)s(H)s(C1
)s(R
)s(E
+=−=
Diperoleh :
)s(R)s(H)s(G1
1)s(E
+=
Galat keadaan tunak:
)s(H)s(G1
)s(sRlim)s(sElim)t(elime
0s0stss +
===→→∞→
§ Galat keadaan tunak dapat dinyatakan dengan konstanta galat
statik.
§ Semakin besar konstanta tersebut semakin kecil galatnya.
§ Output sistem dapat dinyatakan sebagai posisi, kecepatan,
percepatan, dst.
§ Misal : sistem kendali suhu: posisi menyatakan output suhu,
dan kecepatan menyatakan laju perubahan suhu terhadap
waktu.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 10 dari 24
♦ Konstanta Galat Statik
)0(H)0(G1
1
s
1
)s(H)s(G1
slime
0sss
+=
+=
→
Konstanta galat posisi statik:
)0(H)0(G)s(H)s(GlimK0s
p ==→
Sehingga galat keadaan tunak :
pss K1
1e
+=
Untuk sistem tipe 0:
K)1sT()1sT(
)1sT)(1sT(KlimK
21
ba
0sp =
++++
=→ L
L
Untuk sistem tipe 1 atau lebih:
)1N()1sT()1sT(s
)1sT)(1sT(KlimK
21N
ba
0sp ≥∞=
++++
=→ L
L
Galat Keadaan Tunak untuk Input Unit Step:
K1
1ess +
= untuk sistem tipe 0
0ess = untuk sistem tipe ≥1
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 11 dari 24
Galat Keadaan Tunak untuk Input Unit Ramp:
)s(H)s(sG
1lim
s
1
)s(H)s(G1
slime
0s
20sss
→
→
=
+=
Konstanta galat kecepatan statik :
)s(H)s(sGlimk0s→
=υ
Sehingga galat keadaan tunak :
υK
1ess =
Untuk sistem tipe 0 :
0)1sT)(1sT(
1sT)(1sT(sKlimk
21
ba
0sv =
++++
=→ L
L
Untuk sistem tipe 1 :
K)1sT)(1sT(
1sT)(1sT(sKlimk
21
ba
0sv =
++++
=→ L
L
Untuk sistem tipe 2 atau lebih :
)2N()1sT)(1sT(s
1sT)(1sT(sKlimk
21N
ba
0sv ≥∞=
++++
=→ L
L
∞==υK
1ess for type 0 systems
K
1
K
1ess ==
υ
for type 1 systems
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 12 dari 24
0K
1ess ==
υ
for type 2 or higher systems
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 13 dari 24
§ Pengertian galat kecepatan pada Kv menunjukkan galat
posisi untuk input ramp, bukan galat dalam kecepatan.
§ Sistem tipe 0 tak mampu mengikuti input ramp pada
keadaan tunak.
§ Sistem tipe 1 mampu mengikuti input ramp, meskipun
memiliki galat posisi pada keadaan tunak.
§ Sistem tipe 2 atau lebih mampu mengikuti input ramp
tanpa menimbulkan galat pada keadaan tunak.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 14 dari 24
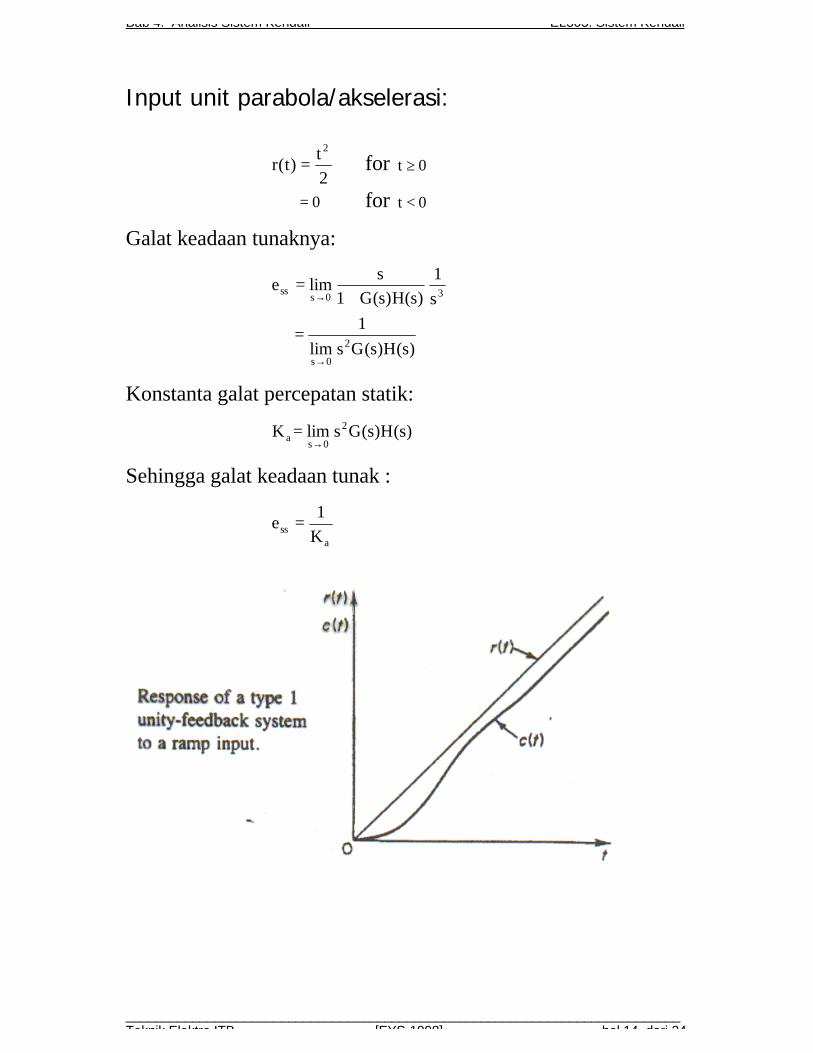
Input unit parabola/akselerasi:
2
t)t(r
2
= for 0t ≥
0= for 0t <
Galat keadaan tunaknya:
)s(H)s(Gslim
1
s
1
)s(H)s(G1
slime
2
0s
30sss
→
→
=
+=
Konstanta galat percepatan statik:
)s(H)s(GslimK 2
0sa →=
Sehingga galat keadaan tunak :
ass K
1e =
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 15 dari 24
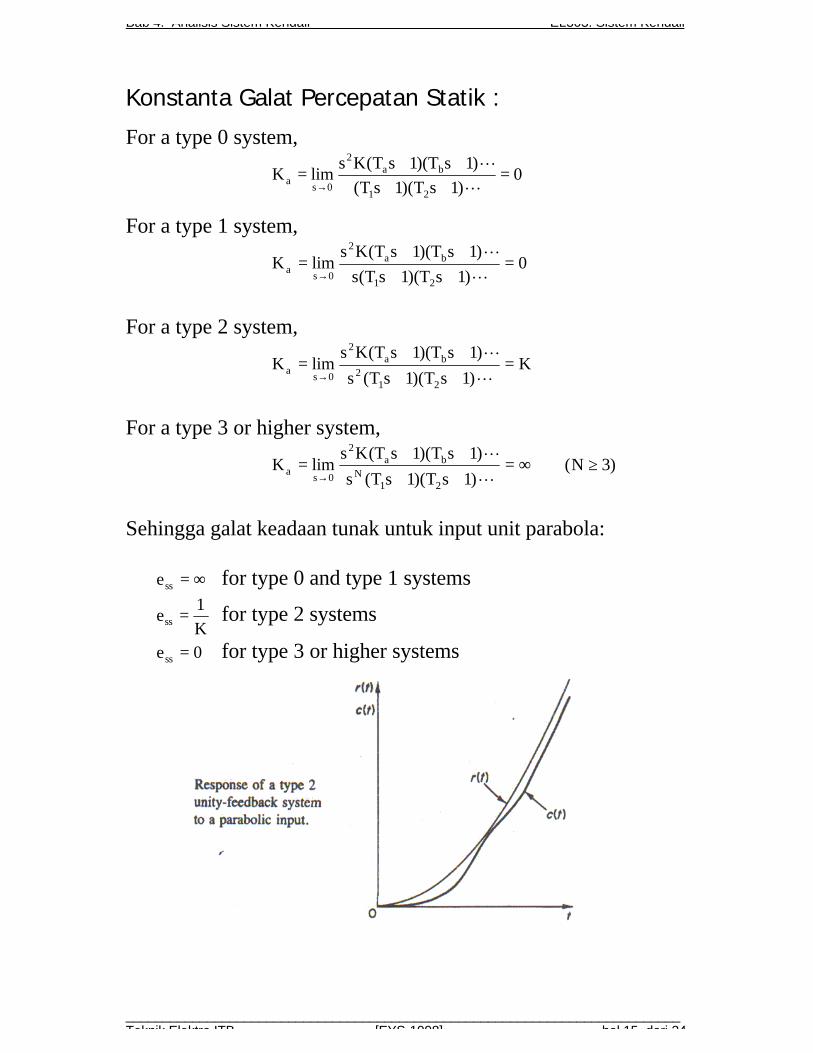
Konstanta Galat Percepatan Statik :
For a type 0 system,
0)1sT)(1sT(
)1sT)(1sT(KslimK
21
ba2
0sa =
++++
=→ L
L
For a type 1 system,
0)1sT)(1sT(s
)1sT)(1sT(KslimK
21
ba2
0sa =
++++
=→ L
L
For a type 2 system,
K)1sT)(1sT(s
)1sT)(1sT(KslimK
212
ba2
0sa =
++++
=→ L
L
For a type 3 or higher system,
)3N()1sT)(1sT(s
)1sT)(1sT(KslimK
21N
ba2
0sa ≥∞=
++++
=→ L
L
Sehingga galat keadaan tunak untuk input unit parabola:
∞=sse for type 0 and type 1 systems
K
1ess = for type 2 systems
0ess = for type 3 or higher systems
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 16 dari 24
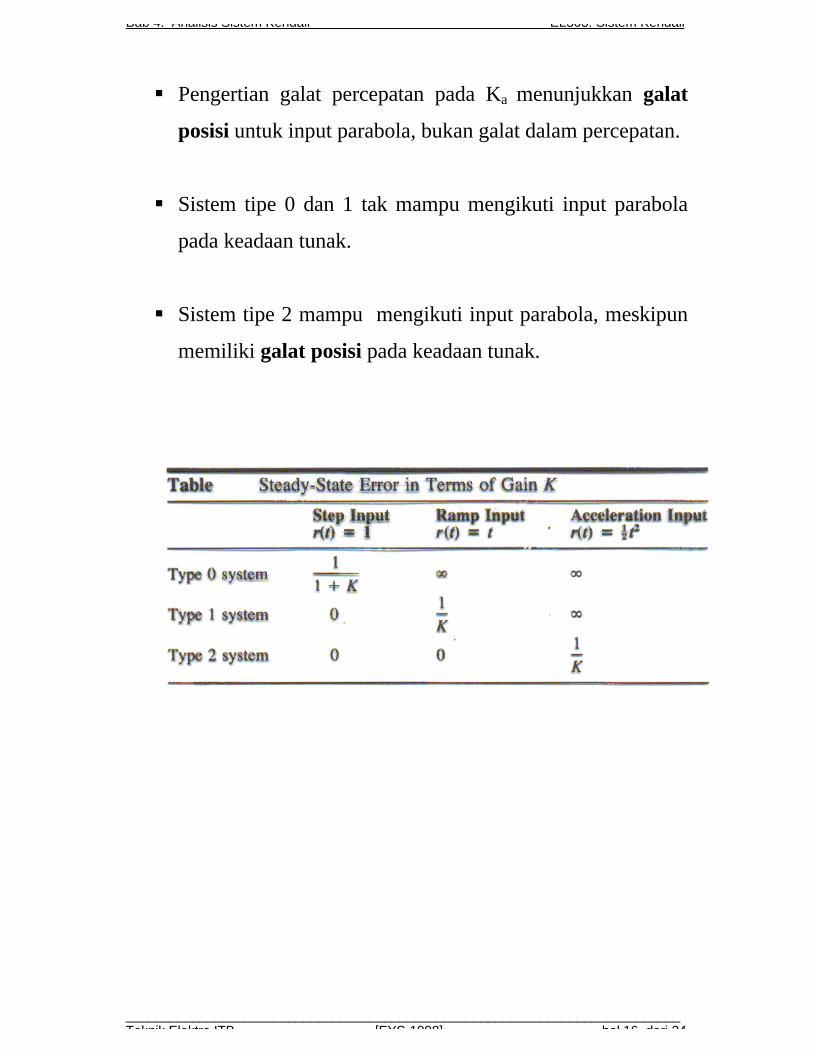
§ Pengertian galat percepatan pada Ka menunjukkan galat
posisi untuk input parabola, bukan galat dalam percepatan.
§ Sistem tipe 0 dan 1 tak mampu mengikuti input parabola
pada keadaan tunak.
§ Sistem tipe 2 mampu mengikuti input parabola, meskipun
memiliki galat posisi pada keadaan tunak.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 17 dari 24
♦ Hubungan antara Integral Galat pada Input Stepdan Galat Keadaan Tunak pada Tanggapan Ramp.
Definisikan:
)s(Edt)t(e)]t(e[L0
st =∈= ∫∞ −
Maka:
)s(Elimdt)t(edt)t(elim0s00
st
0s →
∞∞ −
→==∈ ∫∫
Ingat:
)s(H)s(G1
1
)s(R
)s(C)s(H1
)s(R
)s(E
+=−=
Sehingga:
+
=→
∞
∫ )s(H)s(G1
)s(Rlimdt)t(e
0s0
Untuk input unit step :
υK
1
)s(H)s(sG
1lim
s
1
)s(H)s(G1
1limdt)t(e
0s
0s0
=
=
+
=
→
→
∞
∫
= steady-state actuating error in unit-ramp response
Dengan demikian :
ssr0edt)t(e =∫
∞
dengan : e(t) = galat untuk tanggapan unit step
essr = galat keadaan tunak untuk tanggapan unit
ramp

Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 18 dari 24
§ Bila essr = 0, maka e(t) harus berubah tandanya minimal sekali.Hal ini menunjukkan bahwa sistem dengan ∞=vK akan munculminimal sekali overshoot bila diberi input step.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 19 dari 24
o ANALISIS KEPEKAAN
§ Kepekaan suatu sistem terhadap suatu komponen
penyusunannya merupakan ukuran ketergantungan
karakteristiknya terhadap komponen tersebut.
,)s(Kinchange0
0
)s(Tinchange00
)s(KInd
)s(TInd)s(ST
K ==
dengan:
)s(R/)s(C)s(T =
Definisi kepekaan lain:
)s(K/)s(dK
)s(T/)s(dT)s(ST
K =
§ Kepekaan T(s) terhadap K(s) adalah persentase perubahan
dalam T(s) dibagi dengan persentase perubahan pada K(s)
yang menyebabkan terjadinya perubahan pada T(s).
§ Definisi diatas hanya berlaku untuk perubahan yang kecil.
§ Kepekaan merupakan fungsi dari frekuensi.
§ Sistem ideal memiliki kepekaan nol terhadap setiap parameter.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 20 dari 24
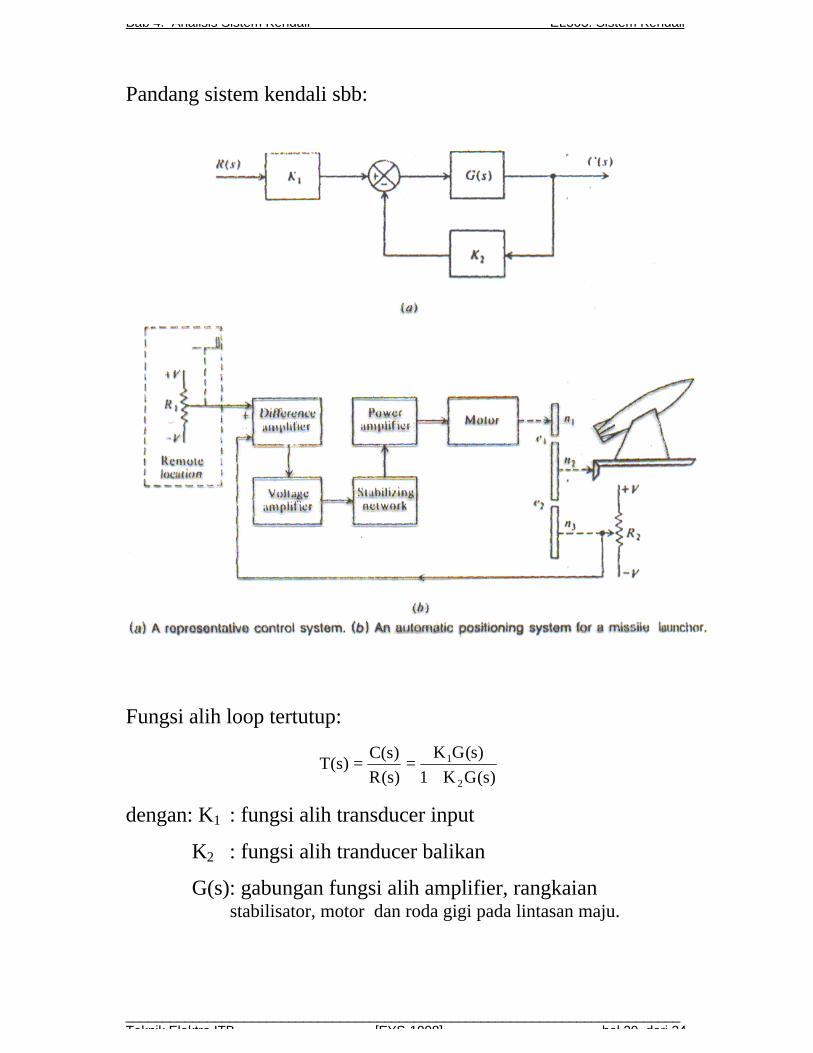
Pandang sistem kendali sbb:
Fungsi alih loop tertutup:
)s(GK1
)s(GK
)s(R
)s(C)s(T
2
1
+==
dengan: K1 : fungsi alih transducer input
K2 : fungsi alih tranducer balikan
G(s): gabungan fungsi alih amplifier, rangkaian stabilisator, motor dan roda gigi pada lintasan maju.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 21 dari 24
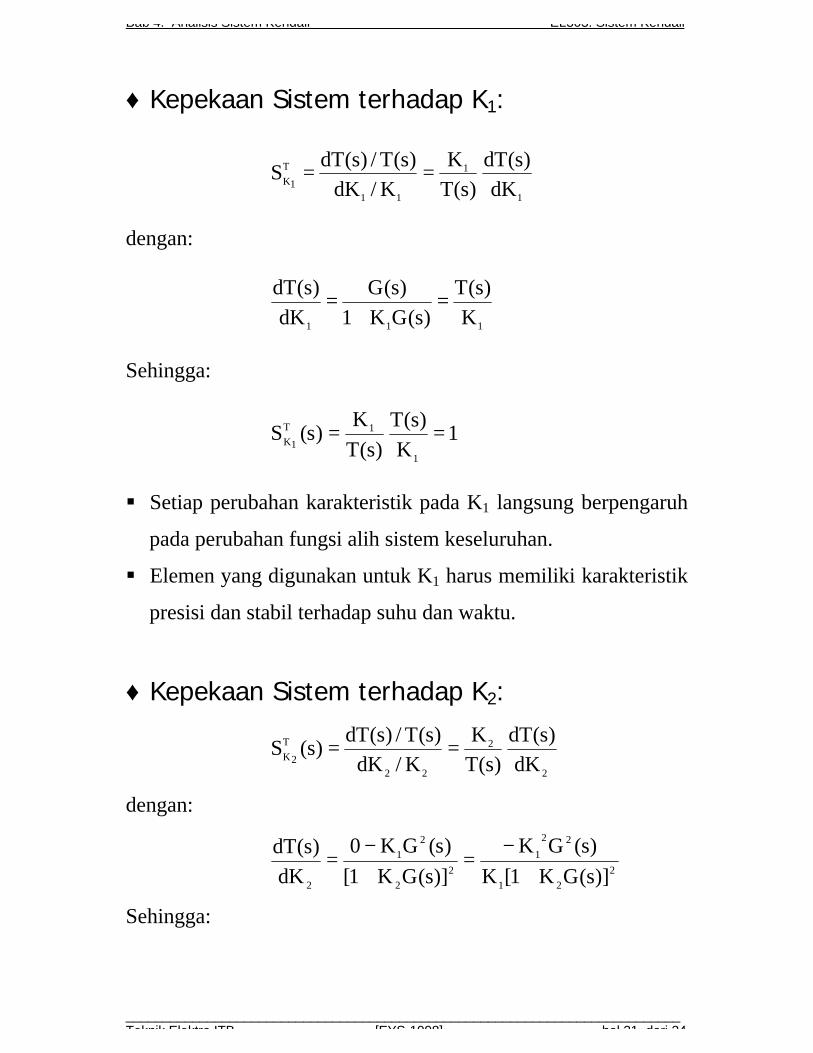
♦ Kepekaan Sistem terhadap K1:
1
1
11
T
1K dK)s(dT
)s(TK
K/dK)s(T/)s(dT
S ==
dengan:
111 K
)s(T
)s(GK1
)s(G
dK
)s(dT=
+=
Sehingga:
1K
)s(T
)s(T
K)s(S
1
1T
1K ==
§ Setiap perubahan karakteristik pada K1 langsung berpengaruh
pada perubahan fungsi alih sistem keseluruhan.
§ Elemen yang digunakan untuk K1 harus memiliki karakteristik
presisi dan stabil terhadap suhu dan waktu.
♦ Kepekaan Sistem terhadap K2:
2
2
22
T
2K dK)s(dT
)s(TK
K/dK)s(T/)s(dT
)s(S ==
dengan:
2
21
22
1
2
2
2
1
2 )]s(GK1[K
)s(GK
)]s(GK1[
)s(GK0
dK
)s(dT
+−
=+−
=
Sehingga:

Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 22 dari 24
)s(GK1
)s(GK
)]s(GK1[K
)s(GK
)s(T
K)s(S
2
2
2
21
22
12T
2K +−
=+
−=
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 23 dari 24
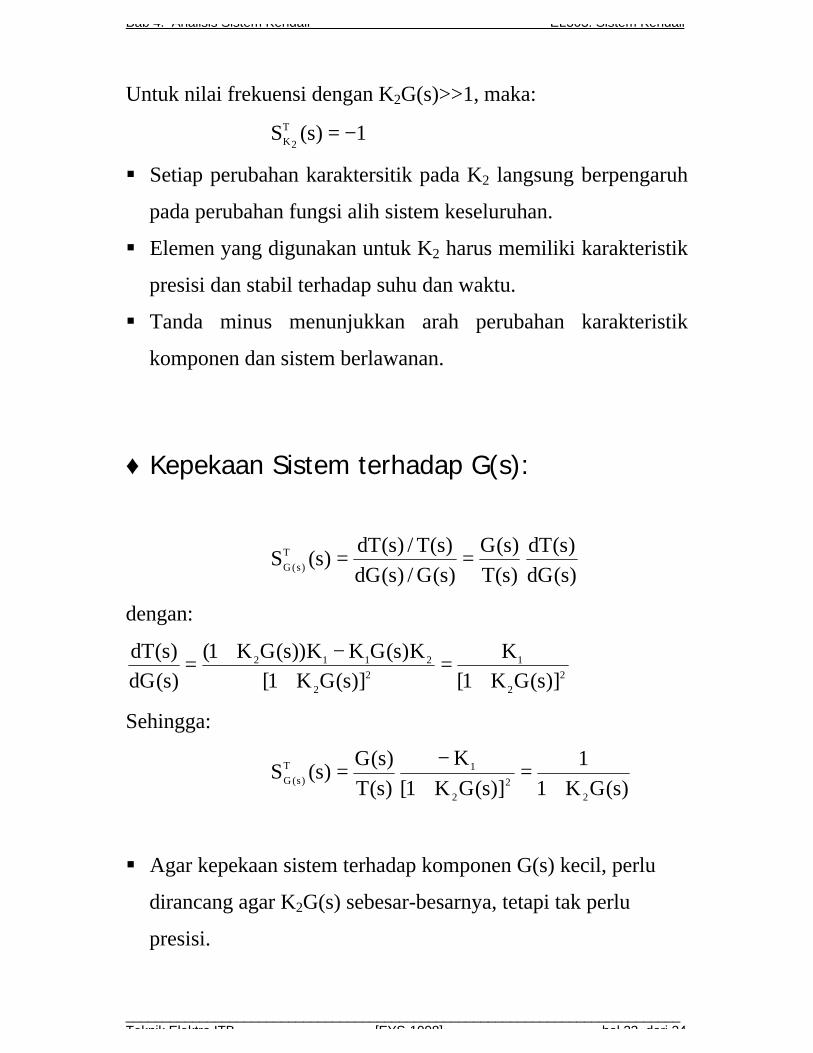
Untuk nilai frekuensi dengan K2G(s)>>1, maka:
1)s(ST
2K −=
§ Setiap perubahan karaktersitik pada K2 langsung berpengaruh
pada perubahan fungsi alih sistem keseluruhan.
§ Elemen yang digunakan untuk K2 harus memiliki karakteristik
presisi dan stabil terhadap suhu dan waktu.
§ Tanda minus menunjukkan arah perubahan karakteristik
komponen dan sistem berlawanan.
♦ Kepekaan Sistem terhadap G(s):
)s(dG
)s(dT
)s(T
)s(G
)s(G/)s(dG
)s(T/)s(dT)s(ST
)s(G ==
dengan:
22
1
22
2112
)]s(GK1[K
)]s(GK1[K)s(GKK))s(GK1(
)s(dG)s(dT
+=
+−+
=
Sehingga:
)s(GK1
1
)]s(GK1[
K
)s(T
)s(G)s(S
2
2
2
1T
)s(G +=
+−
=
§ Agar kepekaan sistem terhadap komponen G(s) kecil, perlu
dirancang agar K2G(s) sebesar-besarnya, tetapi tak perlu
presisi.
Bab 4: Analisis Sistem Kendali EL303: Sistem Kendali
___________________________________________________________________________Teknik Elektro ITB [EYS-1998] hal 24 dari 24
§ Kepekaan sistem tergantung pada frekuensi, sehingga sistem
peka atau tidak terhadap G(s) hanya pada cakupan frekuensi
tertentu saja.







![H ×ô ¸ w Ö K²¦ ª ;Mh Ö K ¤ e ! w · UpVoMsMqMO] JUK £{ Íw\q æ b q| Ö Kt \ .; ót t bè¹ Ì Ttb \qx O ApK {^ t| Ö K ²t D ós¦ ª qt Ö K ¤w e ! ' b \qUD ópK y](https://img.pdfslide.tips/doc/110x75/5e83fecdf4dfaa2bf45bd5f7/h-w-k-mh-k-e-w-upvomsmqmo-juk-wq-b-q-kt.jpg)














![«Úk{ ykð]r¥k : 2013 Lkf÷ : 1000 · fu f⁄k {k”k SðLk SððkLke f⁄k{kt s Mk{kÞ òÞ Au, yu yˆkußkkyu yk ‚SðLk SððkLke f⁄k™ ˆkwMíkf ykˆkLkk nkÚk{kt {qfe hÌkku](https://img.pdfslide.tips/doc/110x75/5ec45e1ed8b14c2bc81cd6eb/k-ykrk-2013-lkf-fu-fak-kak-slk-sklke-fakkt-s-mkk.jpg)






