Embed Size (px)
Citation preview

Praca przejściowa
Temat: Projekt i realizacja pneumatycznych układów
sekwencyjnych.
Instrukcja laboratoryjna
Wykonał:
inż. Paweł Konarski
Promotor:
mgr inż. Alicja Siewnicka

1. Wstęp.
Celem ćwiczenia jest zapoznanie się z budową i zasadą działania pneumatycznych układów
sterowania, nabycie umiejętności projektowania schematów pneumatycznych i
elektropneumatycznych oraz praktyczna realizacja zadań w laboratorium.
Pneumatyczne układy sterowania wykorzystywane są w wielu dziedzinach, mają powszechne
zastosowanie w mechanizacji i automatyzacji wielu branż przemysłu. Z techniką tą spotykamy się na
co dzień, często jej nie zauważając. Dlatego też znajomość zagadnień związanych z układami
pneumatycznymi jest coraz bardziej istotna.
2. Struktura pneumatycznych układów sterowania.
W każdym pneumatycznym układzie sekwencyjnym wyróżnia się trzy części. Pierwszą z nich stanowi
układ przygotowania powietrza, drugą układ sterujący, a ostatnią układ wykonawczy (energetyczny,
napędowy).
Zespół przygotowania powietrza zazwyczaj zawiera poniższe elementy:
a) Filtr zatrzymujący zanieczyszczenia doprowadzonego sprężonego powietrza. b) Zawór redukcyjny za pomocą, którego ustala się ciśnienie powietrza doprowadzonego do układu. c) Manometr do pomiaru ustalonego ciśnienia. d) Smarownica wprowadzająca mgłę olejową (czynnik smarny), konserwującą elementy ruchome zaworów i siłowników.
Rysunek 1 Symbol układu przygotowania powietrza. Rysunek 2 Przykładowy zespół
przygotowania powietrza [3].
Zespół sterujący, którego zadaniem jest sterowanie zaworem rozdzielającym. Zawiera:
Zawory sygnałowe – przyciski i przełączniki umożliwiające obsługę urządzenia, oraz zawory informujące o stanie urządzenia.
Zawory przetwarzające informacje z zaworów sygnałowych na sygnały do zaworów rozdzielających.
Zespół wykonawczy układu pneumatycznego lub elektropneumatycznego składa się z:
Zaworów roboczych, które doprowadzają sprężone powietrze do właściwych komór siłownika pneumatycznego (zawory rozdzielające) oraz ograniczają prędkości tłoka (tz. zawory dławiąco-zwrotne).
Siłownika zamieniającego energię sprężonego powietrza na energię mechaniczną wykonując przemieszczenie napędzanego urządzenia.
2.1. Siłowniki pneumatyczne.
Siłowniki pneumatyczne są to elementy wykonawcze przetwarzające sygnał sterujący (sprężone
powietrze) na przesunięcie liniowe lub kątowe. W zależności od wykonywanego ruchu można
wymienić:
2.1.1. Siłowniki wykonujące ruch posuwisto-zwrotny (liniowe).
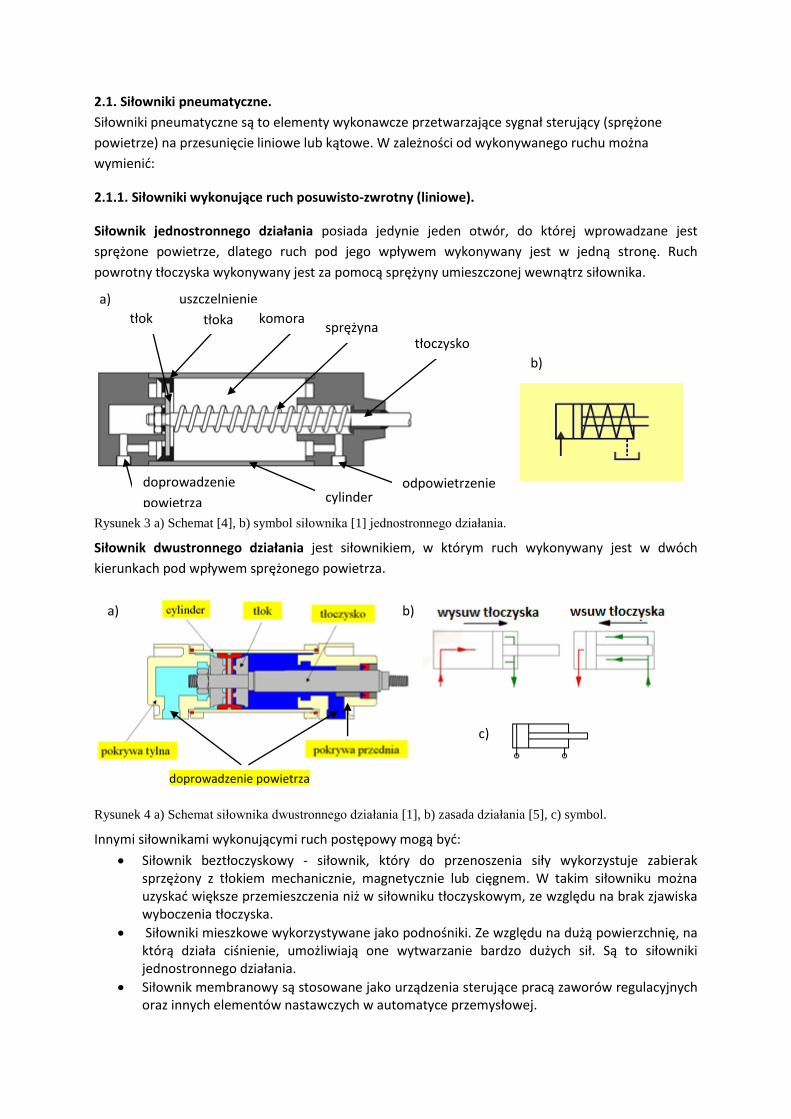
Siłownik jednostronnego działania posiada jedynie jeden otwór, do której wprowadzane jest
sprężone powietrze, dlatego ruch pod jego wpływem wykonywany jest w jedną stronę. Ruch
powrotny tłoczyska wykonywany jest za pomocą sprężyny umieszczonej wewnątrz siłownika.
Rysunek 3 a) Schemat [4], b) symbol siłownika [1] jednostronnego działania.
Siłownik dwustronnego działania jest siłownikiem, w którym ruch wykonywany jest w dwóch
kierunkach pod wpływem sprężonego powietrza.
Rysunek 4 a) Schemat siłownika dwustronnego działania [1], b) zasada działania [5], c) symbol.
Innymi siłownikami wykonującymi ruch postępowy mogą być:
Siłownik beztłoczyskowy - siłownik, który do przenoszenia siły wykorzystuje zabierak sprzężony z tłokiem mechanicznie, magnetycznie lub cięgnem. W takim siłowniku można uzyskać większe przemieszczenia niż w siłowniku tłoczyskowym, ze względu na brak zjawiska wyboczenia tłoczyska.
Siłowniki mieszkowe wykorzystywane jako podnośniki. Ze względu na dużą powierzchnię, na którą działa ciśnienie, umożliwiają one wytwarzanie bardzo dużych sił. Są to siłowniki jednostronnego działania.
Siłownik membranowy są stosowane jako urządzenia sterujące pracą zaworów regulacyjnych oraz innych elementów nastawczych w automatyce przemysłowej.
tłok
uszczelnienie
tłoka komora sprężyna
tłoczysko
cylinder odpowietrzenie doprowadzenie
powietrza
a)
b)
a) b)
c)
doprowadzenie powietrza

2.1.2. Siłowniki pneumatyczne o ruchu obrotowo-zwrotnym (kątowe). Siłownik z przekładnią zębatą, w którym tłok działa jak zębatka, współpracująca z kołem zębatym, zamieniając ruch postępowy na obrotowy.
Rysunek 5 Schemat i widok siłownika z przekładnią zębatą.
Siłownik z obrotowym tłokiem łopatkowym.
Rysunek 6 Schemat poglądowy oraz widok siłownika z tłokiem łopatkowym.
W przypadku obu tych siłowników można zauważyć iż posiadają one ograniczony kąt obrotu, zawsze
mniejszy niż 360˚.
2.1.3. Silniki pneumatyczne.
Silnik łopatkowy przedstawiony na rys. 8 wykonuje ruch obrotowy w wyniku oddziaływania
sprężonego powietrza na powierzchnie łopatek. Charakteryzują się wysokimi prędkościami
obrotowymi rzędu 30 000 obr./min.
Rysunek 7 Schemat poglądowy oraz widok silnika łopatkowego [1].
Pneumatyczne silniki turbinowe osiągają jeszcze wyższe prędkości obrotowe dochodzące do 50 000
obr./min. Zasadę działania oraz przykładowe silniki turbinowe przedstawia rys. 9.
Rysunek 8 Pneumatyczny silnik turbinowy [1]: 1 – oś wirnika, 2 – wirnik, 3 – wylot do atmosfery,
4 – wlot sprężonego powietrza
tłok
doprowadzenie powietrza
2.2. Zawory pneumatyczne.
Zawory pneumatyczne to urządzenia służące do kierowania strumienia powietrza do odpowiednich
przewodów lub obszarów.
Podział zaworów ze względu na budowę:
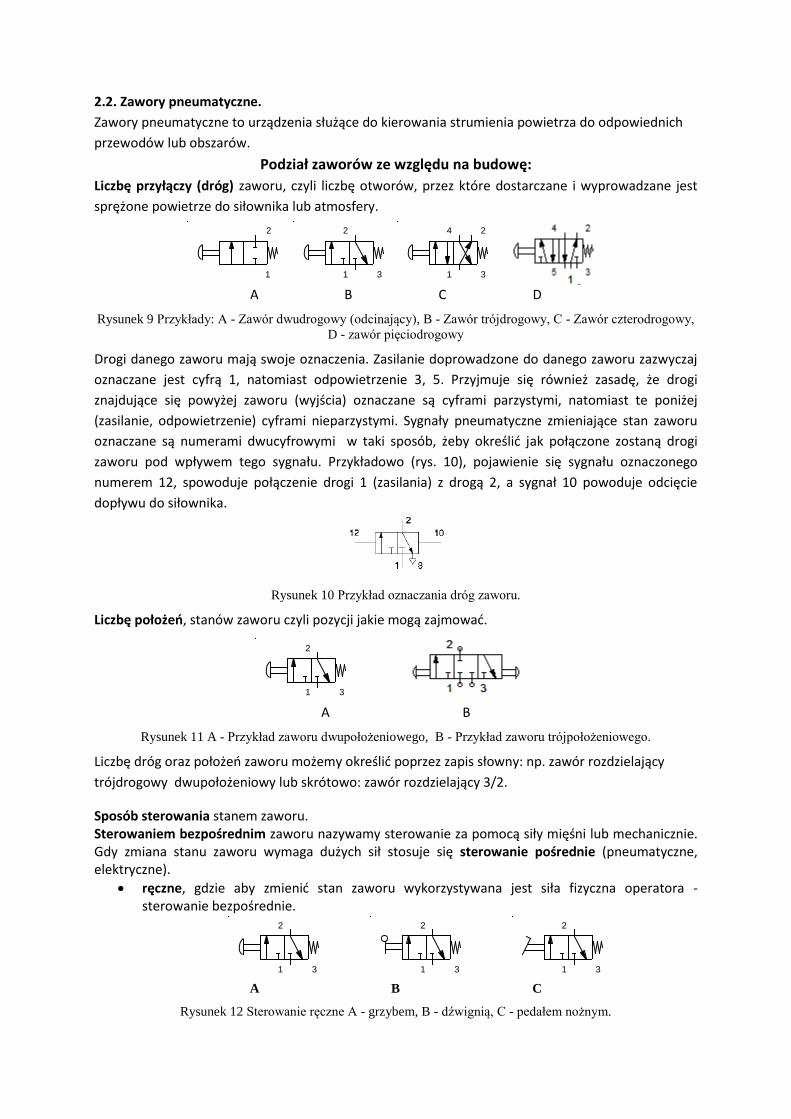
Liczbę przyłączy (dróg) zaworu, czyli liczbę otworów, przez które dostarczane i wyprowadzane jest
sprężone powietrze do siłownika lub atmosfery.
A B C D
Rysunek 9 Przykłady: A - Zawór dwudrogowy (odcinający), B - Zawór trójdrogowy, C - Zawór czterodrogowy,
D - zawór pięciodrogowy
Drogi danego zaworu mają swoje oznaczenia. Zasilanie doprowadzone do danego zaworu zazwyczaj
oznaczane jest cyfrą 1, natomiast odpowietrzenie 3, 5. Przyjmuje się również zasadę, że drogi
znajdujące się powyżej zaworu (wyjścia) oznaczane są cyframi parzystymi, natomiast te poniżej
(zasilanie, odpowietrzenie) cyframi nieparzystymi. Sygnały pneumatyczne zmieniające stan zaworu
oznaczane są numerami dwucyfrowymi w taki sposób, żeby określić jak połączone zostaną drogi
zaworu pod wpływem tego sygnału. Przykładowo (rys. 10), pojawienie się sygnału oznaczonego
numerem 12, spowoduje połączenie drogi 1 (zasilania) z drogą 2, a sygnał 10 powoduje odcięcie
dopływu do siłownika.
Rysunek 10 Przykład oznaczania dróg zaworu.
Liczbę położeń, stanów zaworu czyli pozycji jakie mogą zajmować.
A B
Rysunek 11 A - Przykład zaworu dwupołożeniowego, B - Przykład zaworu trójpołożeniowego.
Liczbę dróg oraz położeń zaworu możemy określić poprzez zapis słowny: np. zawór rozdzielający
trójdrogowy dwupołożeniowy lub skrótowo: zawór rozdzielający 3/2.
Sposób sterowania stanem zaworu. Sterowaniem bezpośrednim zaworu nazywamy sterowanie za pomocą siły mięśni lub mechanicznie. Gdy zmiana stanu zaworu wymaga dużych sił stosuje się sterowanie pośrednie (pneumatyczne, elektryczne).
ręczne, gdzie aby zmienić stan zaworu wykorzystywana jest siła fizyczna operatora - sterowanie bezpośrednie.
A B C
Rysunek 12 Sterowanie ręczne A - grzybem, B - dźwignią, C - pedałem nożnym.
2
1
2
1 3
4 2
1 3
2
1 3
2
1 3
2
1 3
2
1 3
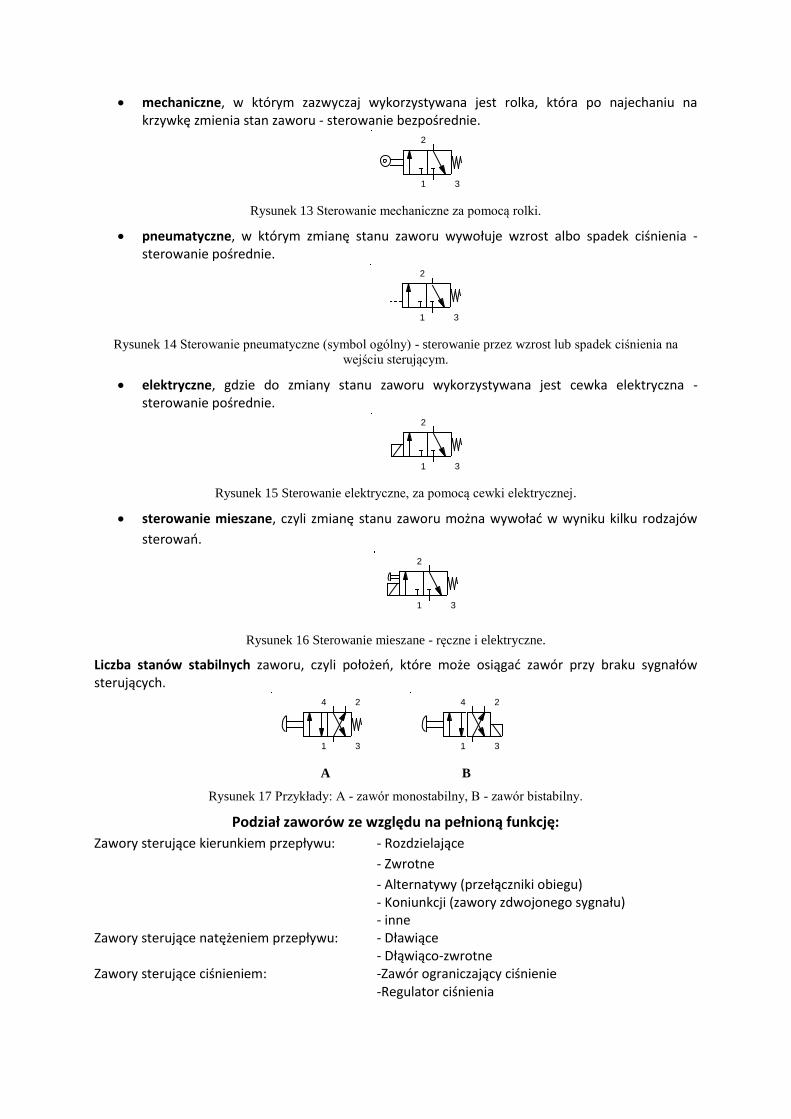
mechaniczne, w którym zazwyczaj wykorzystywana jest rolka, która po najechaniu na krzywkę zmienia stan zaworu - sterowanie bezpośrednie.
Rysunek 13 Sterowanie mechaniczne za pomocą rolki.
pneumatyczne, w którym zmianę stanu zaworu wywołuje wzrost albo spadek ciśnienia - sterowanie pośrednie.
Rysunek 14 Sterowanie pneumatyczne (symbol ogólny) - sterowanie przez wzrost lub spadek ciśnienia na
wejściu sterującym.
elektryczne, gdzie do zmiany stanu zaworu wykorzystywana jest cewka elektryczna - sterowanie pośrednie.
Rysunek 15 Sterowanie elektryczne, za pomocą cewki elektrycznej.
sterowanie mieszane, czyli zmianę stanu zaworu można wywołać w wyniku kilku rodzajów
sterowań.
Rysunek 16 Sterowanie mieszane - ręczne i elektryczne.
Liczba stanów stabilnych zaworu, czyli położeń, które może osiągać zawór przy braku sygnałów sterujących.
A B
Rysunek 17 Przykłady: A - zawór monostabilny, B - zawór bistabilny.
Podział zaworów ze względu na pełnioną funkcję:
Zawory sterujące kierunkiem przepływu: - Rozdzielające
- Zwrotne
- Alternatywy (przełączniki obiegu) - Koniunkcji (zawory zdwojonego sygnału) - inne Zawory sterujące natężeniem przepływu: - Dławiące - Dłąwiąco-zwrotne Zawory sterujące ciśnieniem: -Zawór ograniczający ciśnienie -Regulator ciśnienia
2
1 3
2
1 3
2
1 3
2
1 3
4 2
1 3
4 2
1 3
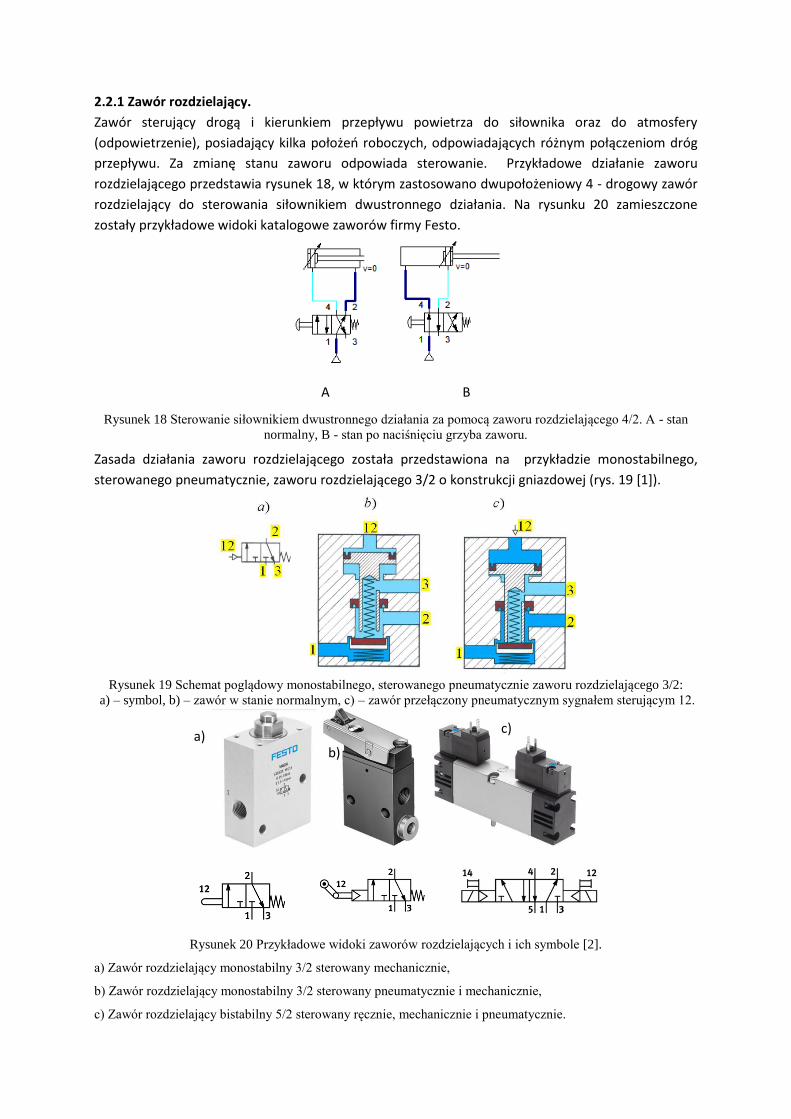
2.2.1 Zawór rozdzielający.
Zawór sterujący drogą i kierunkiem przepływu powietrza do siłownika oraz do atmosfery
(odpowietrzenie), posiadający kilka położeń roboczych, odpowiadających różnym połączeniom dróg
przepływu. Za zmianę stanu zaworu odpowiada sterowanie. Przykładowe działanie zaworu
rozdzielającego przedstawia rysunek 18, w którym zastosowano dwupołożeniowy 4 - drogowy zawór
rozdzielający do sterowania siłownikiem dwustronnego działania. Na rysunku 20 zamieszczone
zostały przykładowe widoki katalogowe zaworów firmy Festo.
A B
Rysunek 18 Sterowanie siłownikiem dwustronnego działania za pomocą zaworu rozdzielającego 4/2. A - stan
normalny, B - stan po naciśnięciu grzyba zaworu.
Zasada działania zaworu rozdzielającego została przedstawiona na przykładzie monostabilnego,
sterowanego pneumatycznie, zaworu rozdzielającego 3/2 o konstrukcji gniazdowej (rys. 19 [1]).
Rysunek 19 Schemat poglądowy monostabilnego, sterowanego pneumatycznie zaworu rozdzielającego 3/2:
a) – symbol, b) – zawór w stanie normalnym, c) – zawór przełączony pneumatycznym sygnałem sterującym 12.
Rysunek 20 Przykładowe widoki zaworów rozdzielających i ich symbole [2].
a) Zawór rozdzielający monostabilny 3/2 sterowany mechanicznie,
b) Zawór rozdzielający monostabilny 3/2 sterowany pneumatycznie i mechanicznie,
c) Zawór rozdzielający bistabilny 5/2 sterowany ręcznie, mechanicznie i pneumatycznie.
a) b)
c)

2.2.2 Zawór zwrotny.
Zawory te umożliwiają przepływ powietrza jedynie w jednym kierunku
Rysunek 21 Schemat poglądowy [1] oraz symbol zaworu zwrotnego.
2.2.3 Zawór alternatywy (przełączniki obiegu).
Zawór realizujący funkcję „lub” dwóch pneumatycznych sygnałów wejściowych. Sygnał
pneumatyczny (sprężone powietrze) pojawi się na wyjściu wtedy, gdy na co najmniej jednym z wejść
pojawi się sprężone powietrze.
Rysunek 22 Schemat poglądowy [1] oraz symbol zaworu alternatywy.
2.2.4 Zawór koniunkcji (zawory zdwojonego sygnału).
Zawory służące do realizacji funkcji „and” dwóch wejściowych sygnałów pneumatycznych. Sygnał na
wyjściu pojawi się wtedy, gdy na obu z wejść pojawi się sygnał.
Rysunek 23 Schemat poglądowy [1] oraz symbol zaworu koniunkcji.
2.2.5 Zawory ograniczające natężenie przepływu:
Zawór dławiący.
Zawór ograniczający natężenie przepływu, co wpływa na szybkość przemieszczania się siłownika.
Rysunek 24 Schemat poglądowy [1] oraz symbol zaworu dławiącego.
1 2
10 11
10 11

Zawór dławiąco-zwrotny.
Zawór ograniczający natężenie przepływu jedynie w jednym kierunku.
Rysunek 25 Schemat poglądowy, zasada działania [1] oraz symbol zaworu dławiąco-zwrotnego.
2.2.6 Wyspy zaworowe.
Wyspy zaworowe tworzą zespół blokowy zaworów elektromagnetycznych (nawet do 24 zaworów),
które posiadają wspólne zasilanie sprężonym powietrzem, co minimalizuje rozmiary układu oraz
zmniejsza liczbę przewodów pneumatycznych. Jedną z głównych cech wysp jest ich modułowość - w
każdej chwili można je rozszerzać o nowe zawory czy też płyty zasilające - tworząc różne strefy
ciśnienia. Do wysterowania zaworów oraz ich diagnostyki zazwyczaj wykorzystywane są wbudowane
moduły Fieldbus (do bezpośredniego podłączania zaworów do sieci) lub terminale elektryczne (np.
CPX firmy Festo). Kolejną zaletą jaką można wymienić jest łatwość montażu w szafie sterującej za
pomocą płyt przyłączeniowych. Swoje zastosowanie znajdują w rozbudowanych systemach
sterowania pneumatycznego.
Rysunek 26 Widok wyspy zaworowej Festo VTUG [2].

Zasady wykonywania schematów pneumatycznych.
Schemat układu pneumatycznego nie przedstawia rzeczywistego rozmieszczenia poszczególnych
elementów układu, jest jednak uporządkowanym i czytelnym przedstawieniem połączeń
sygnałowych elementów układu oraz dróg przepływu sprężonego powietrza. Posiadają strukturę
warstwową.
Warstwa górna - zespół roboczy.
Na samej górze schematu powinien znajdować się siłownik. Tuż pod nim umieszcza się zawory
robocze (dławiące, rozdzielające).
Warstwa pośrednia - zespół sterujący.
Poniżej warstwy roboczej powinno umieszczać się zawory przetwarzające informacje, pod którymi z
kolej powinny znaleźć się zawory sygnałowe.
Warstwa dolna - zespół przygotowania powietrza.
Najniższą warstwę stanowi zespół przygotowania wraz z przewodami doprowadzonymi do kolejnych
elementów tworzących układ.
Rysunek 27 Przykładowy schemat pneumatycznego układu sterowania [1].
Zazwyczaj na schematach pneumatycznych wszystkie elementy mają swoje oznaczenia.
Wprowadzane są po to aby można było zorientować się jak działa dany układ.
Element wykonawczy (1A)
Zawór sterujący
natężeniem
przepływu (1V1)
Zawór rozdzielający (1V2)
Zawór przetwarzający
informacje (1V3)
Zawory sygnałowe (1S1, 1S2,1S3)
Zespół przygotowanie powietrza
(filtr, zawór redukcyjny, smarownica) (1Z1)
Zawory
robocze
Zespół
roboczy
Zespół
sterujący
3. Struktura elektropneumatycznych układów sterowania.
Elektropneumatyczne układy sterowania zawierają układ wykonawczy (energetyczny) sterowany za
pomocą sygnałów elektrycznych oraz sterujący układ elektryczny. W części energetycznej znajduje się
siłownik oraz zawór rozdzielający elektropneumatyczny (sterowany elektrycznie), który jest
przetwornikiem sygnału elektrycznego na pneumatyczny. Można więc powiedzieć, że pełni on swego
rodzaju funkcje wzmacniacza, bowiem sygnał elektryczny rzędu kilku watów przetwarzany jest na
sygnał pneumatyczny o znacznie wyższej mocy - zależnej od przepływu i ciśnienia cieczy. Do budowy
części elektrycznej wykorzystywane są elektromagnesy, przekaźniki, przyciski, łączniki krańcowe oraz
inne elementy sterowania elektrycznego i elektronicznego.
Zasady wykonywania schematów elektropneumatycznych:
Schematy elektropneumatyczne zawierają dwie części. Pierwszą z nich jest układ wykonawczy
zawierający siłowniki oraz zawory rozdzielające (elektropneumatyczne). W drugiej znajduje się układ
sterujący zaworami. Obie części umieszczane są na oddzielnych schematach. Każdy element sterujący
powinien być oznaczony w taki sposób aby można było go znaleźć zarówno na schemacie
elektrycznym jak i sterującym. Dzięki temu możemy zorientować się w jaki sposób działa dany układ.
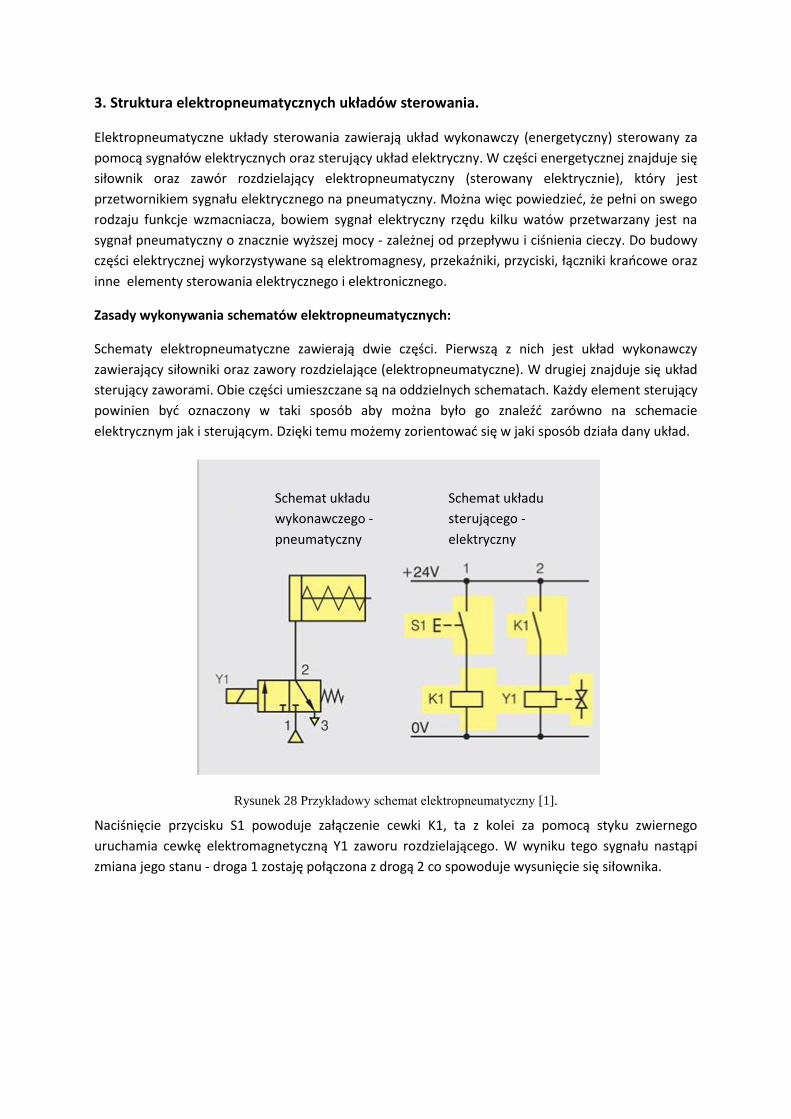
Rysunek 28 Przykładowy schemat elektropneumatyczny [1].
Naciśnięcie przycisku S1 powoduje załączenie cewki K1, ta z kolei za pomocą styku zwiernego
uruchamia cewkę elektromagnetyczną Y1 zaworu rozdzielającego. W wyniku tego sygnału nastąpi
zmiana jego stanu - droga 1 zostaję połączona z drogą 2 co spowoduje wysunięcie się siłownika.
Schemat układu
wykonawczego -
pneumatyczny
Schemat układu
sterującego -
elektryczny

4. Opis programu symulacyjnego Fluidsim Festo.
Fluidsim jest programem przygotowanym przez firmę Festo do projektowania i wykonywania
symulacji układów sterowania pneumatycznego i elektropneumatycznego. Główną zaletą tego
środowiska jest to, że zawiera dużą bazę elementów pneumatycznych wraz z możliwością ich
konfiguracji. Program jest łatwy w obsłudze - do wykonywania prostych symulacji nie wymaga
długiego szkolenia czy też zagłębiania się w dokumentacje, wystarczy podstawowa wiedza z zakresu
sterowania pneumatycznego i elektryki.
Demo programu (m.in. nie zawiera schematów elementów pneumatycznych, brak możliwości zapisu
wykonanego układu) jest dostępne na oficjalnej stronie Festo, pełna wersja jest niestety płatna.
5. Przykłady realizacji zadania w programie Fluidsim.
Założenia zadania: W układzie znajdują się dwa przyciski A i B oraz dwa siłowniki.
Działanie układu:
Chwilowe naciśnięcie pierwszego z przycisków (A) powoduje wysunięcie się siłownika
pierwszego ruchem roboczym - dławionym;
Chwilowe naciśnięcie przycisku drugiego (B) powoduje wysunięcie siłownika drugiego
ruchem roboczym - dławionym.
Jeśli oba siłowniki są w pozycji wysuniętej następuje ich samoczynny powrót ruchem
szybkim - nie dławionym.
5.1. Realizacja zadania z użyciem elementów pneumatycznych
W układzie zastosowane zostały 4 zawory sygnałowe - dwa zawory sterowane ręcznie do obsługi
przycisków A i B, oraz dwa zawory sterowane mechanicznie, za pomocą krzywek umieszczonych na
tłoczysku siłowników. Aby zrealizować podpunkt 3 treści zadania wykorzystany został zawór
zdwojonego sygnału. W układzie znajdują się również dwa bistabilne sterowane pneumatycznie
zawory rozdzielające 5/2 oraz dwa zawory dławiąco-zwrotne.
Rysunek 29 Schemat zrealizowanego zadania za pomocą elementów pneumatycznych.

5.2. Realizacja zadania z użyciem elementów elektropneumatycznych.
Schemat układu wykonawczego - pneumatycznego:
W poniższym układzie wykonawczym znajdują się dwa monostabilne zawory rozdzielające 5/2
sterowane elektrycznie oraz dwa czujniki zbliżeniowe S1 i S2 wykrywające położenie skrajne
siłownika.
Rysunek 30 Schemat części wykonawczej - pneumatycznej.

Schemat układu sterującego - elektrycznego:
W części sterującej dodane zostały przyciski A i B. Po naciśnięciu przycisku A załączana jest cewka 1K,
która podtrzymuje sygnał z przycisku (za pomocą równoległego styku zwiernego) oraz załącza cewkę
RUCH1 zmieniającą stan zaworu. Drugi przycisk B działa podobnie. Pojawienie się sygnałów z
czujników zbliżeniowych S1 i S2 uruchamiają kolejną cewkę ROZLACZ, która poprzez styki rozłączne
powoduje wyłączenie podtrzymania przycisków A i B.
Rysunek 31 Schemat części sterującej.

6. Przebieg ćwiczenia.
Sterowanie pneumatyczne:
Zadanie 1 Dla podanych układów napędowych zaprojektować układy sterujące pneumatyczne zapewniające, że chwilowe naciśnięcie przycisku A powoduje wysunięcie tłoczyska siłownika, a naciśnięcie przycisku B - wycofanie tłoczyska. Zrealizować układy na odpowiednich stanowiskach.
Zadanie 2
Zmodyfikować układy z zadania 1 tak, żeby po wysunięciu tłoczyska następował jego samoczynny powrót - zamiast przycisku B należy zastosować odpowiedni zawór pneumatyczny sterowany mechanicznie krzywką umieszczoną na tłoczysku siłownika.
Zadanie 3 Dla układu napędowego wg rys. a) z zad. 1 zaprojektować odpowiednio układ pneumatyczny, który po naciśnięciu przycisku A spowoduje, że tłok siłownika będzie wykonywał ruchy od jednego skrajnego położenia do drugiego, a po wciśnięciu przycisku B zatrzyma się gdy osiągnie pozycję początkową (tłoczysko wsunięte). Zrealizować układy.
Zadanie 4 Zaprojektować pneumatyczny układ sterowania dwoma siłownikami zapewniający po naciśnięciu przycisku X kolejno: wysunięcie tłoczyska pierwszego siłownika (siłownika A), wysunięcie tłoczyska drugiego siłownika (siłownika B), wycofanie tłoczyska siłownika A, wycofanie tłoczyska siłownika B. Zrealizować układy.
Zadanie 5 Zaprojektować pneumatyczny układ sterowania dwoma siłownikami zapewniający po naciśnięciu przycisku X kolejno: wysunięcie tłoczyska pierwszego siłownika (siłownika A), wysunięcie tłoczyska drugiego siłownika (siłownika B), wycofanie tłoczyska siłownika B, wycofanie tłoczyska siłownika A. Zrealizować układy.

Sterowanie elektropneumatyczne:
Zadanie 1 Dla podanych układów napędowych zaprojektować układy sterujące elektropneumatyczne zapewniające, że chwilowe naciśnięcie przycisku A powoduje wysunięcie tłoczyska siłownika, a naciśnięcie przycisku B - wycofanie tłoczyska. Zrealizować układy na odpowiednich stanowiskach.
Zadanie 2
Zmodyfikować układy z zadania 1 tak, żeby po wysunięciu tłoczyska następował jego samoczynny powrót - zamiast przycisku B należy zastosować odpowiedni zawór pneumatyczny sterowany elektrycznie przekaźnikiem bezdotykowym.
Zadanie 3 Dla układu napędowego wg rys. a) z zad. 1 zaprojektować odpowiednio układ przekaźnikowy, który po naciśnięciu przycisku A spowoduje, że tłok siłownika będzie wykonywał ruchy od jednego skrajnego położenia do drugiego, a po wciśnięciu przycisku B zatrzyma się gdy osiągnie pozycję początkową (tłoczysko wsunięte). Zrealizować układy.
Zadanie 4 Zaprojektować przekaźnikowy układ sterowania dwoma siłownikami zapewniający po naciśnięciu przycisku X kolejno: wysunięcie tłoczyska pierwszego siłownika (siłownika A), wysunięcie tłoczyska drugiego siłownika (siłownika B), wycofanie tłoczyska siłownika A, wycofanie tłoczyska siłownika B. Zrealizować układy.
Zadanie 5 Zaprojektować przekaźnikowy układ sterowania dwoma siłownikami zapewniający po naciśnięciu przycisku X kolejno: wysunięcie tłoczyska pierwszego siłownika (siłownika A), wysunięcie tłoczyska drugiego siłownika (siłownika B), wycofanie tłoczyska siłownika B, wycofanie tłoczyska siłownika A. Zrealizować układy.

7. Sprawozdanie z ćwiczenia. Sprawozdanie z ćwiczenia powinno zawierać schematy zrealizowanych układów.
Bibliografia:
1. dr inż. Wieńczysław J. Kościelny - Ćwiczenie „Projektowanie układów sekwencyjnych” - PA2.pdf
2. http://www.festo.com/cms/pl_pl/index.htm
3. http://www.magazynprzemyslowy.pl/artykul_1783.html
4. http://www.4-20.pl/index.php?id=25
5. http://www.pneumatyka.info.pl/taxonomy/term/225?page=1
6. http://www.pronar.pl/produkcja/___silownikiTlokowe__.html
7. http://plc-online.pl/porady-rady-instrukcje/pneumatyka-czyli-zabawa-ze-sprezonym-
powietrzem/napedy-pneumatyczne/
8.http://www.polna.com.pl/Oferta/Produkty/Si%C5%82owniki%20pneumatyczne%20membranowe
%20wielospr%C4%99%C5%BCynowe/silowniki-pneumatyczne-membranow-0





























