Embed Size (px)
Citation preview
1
I -. ALGUNOS ASPECTOS TEORICOS SOBRE EL MOTOR MONOFASICO.
Para todos los efectos debemos demostrar que al aplicar una fuente monofásica a undevanado de una máquina eléctrica de inducción con rotor en jaula de ardilla, no seproducirá ninguna f.m.m. giratoria neta y por lo tanto, tampoco se podrá desarrollar nicontar con un par mecánico que le permita a la máquina iniciar su giro. Para demostrar lahipótesis planteada tendremos que aplicar una señal al devanado estatórico, tal y como semuestra en la Fig. No.1.
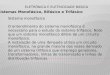
Fig. No. 1. Aplicación de una señal monofásica al estator de un motor y aplicación de fuerza externa.
El motor de inducción monofásico es el único motor que no puede desarrollar un campogiratorio y por ende, no puede desarrollar un par motor neto, a no ser que se use alguno delos métodos de arranque para provocar que el rotor al menos empiece a girar. Estefenómeno se ilustra en la Fig.No. 1, donde puede notarse que el motor, cuyo rotor está enla jaula de ardilla, resulta ser equivalente a un transformador cuyo secundario está encortocircuito. Si se asume que el flujo estatórico va en la dirección mostrada, entonces enel rotor se inducirá una corriente, tal que causará una fmm en dirección opuesta al flujoinductor y por ende, el eje magnético del rotor permanecerá en línea con el eje magnéticodel estator, no generándose ningún campo giratorio y por ende, no produciéndose ningunaacción motor y manteniéndose el rotor como amarrado al campo inductor que genera laseñal monofásica al ser aplicada en el estator, es decir, se da un par resultante nulo, tal ycomo se muestra en la Fig. No. 2.
2
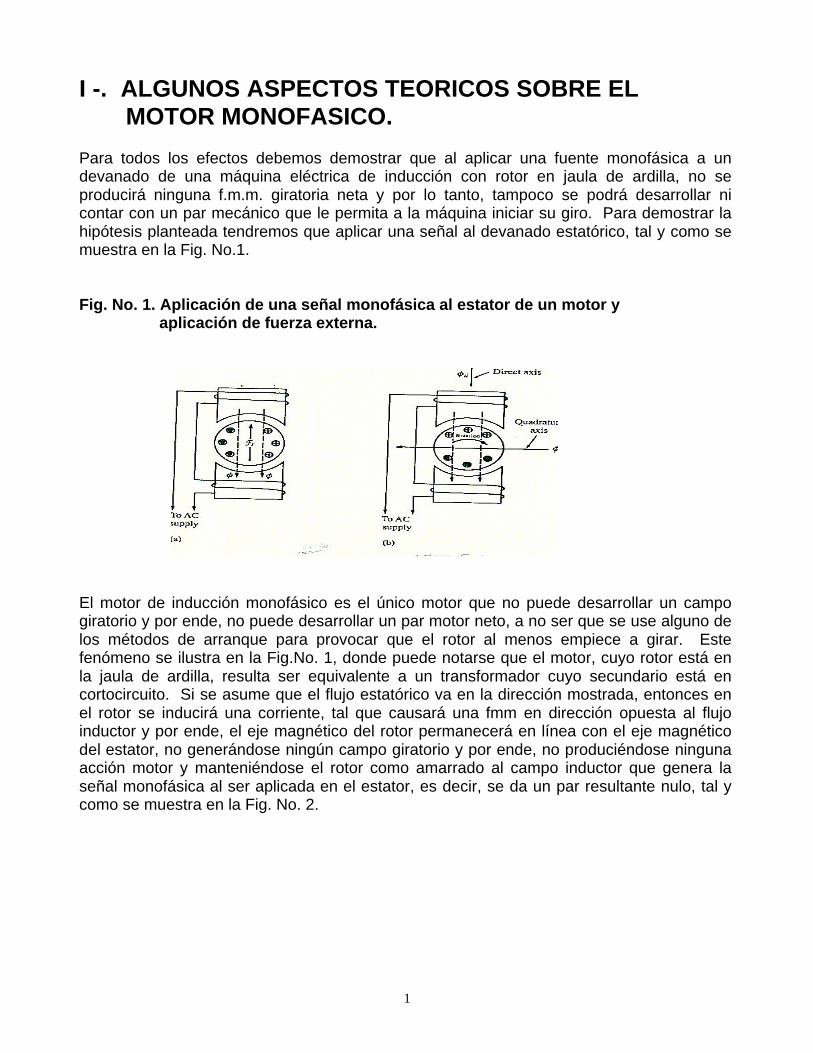
Fig. No. 2. Generación de un par neto nulo al aplicar una señal monofásica al estator de un motor.
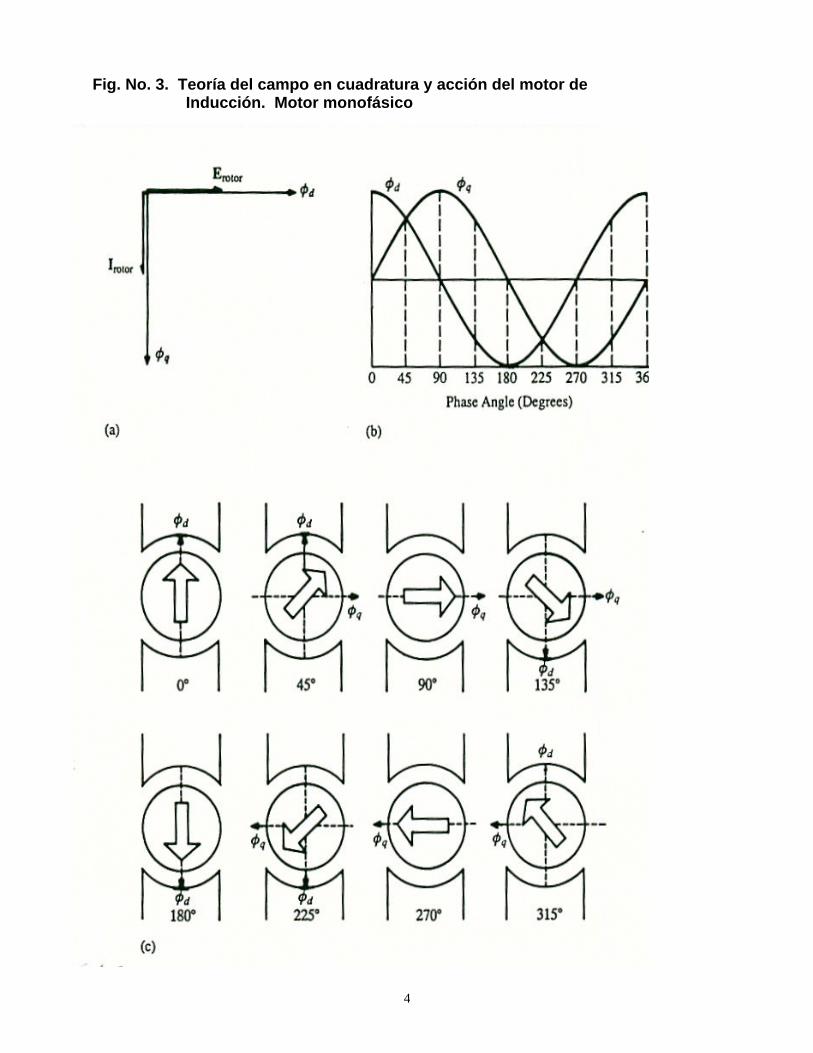
Si estando el rotor en la situación mostrada en a) de la Fig. No.1, se le aplica alguna fuerzamecánica externa en algún sentido (rotación por empuje con la mano), se crea la accióncorrespondiente al motor de inducción y el motor acelerará hasta una velocidad cercana ala de sincronismo (punto b) de la Fig. No, 1). En este caso, el flujo magnético inducido en elrotor tiene una dirección que está a 90 grados eléctricos (eje q) con respecto a la líneacentral del flujo estatórico (eje d) y que resulta de la aplicación de la ley de Lenz. Ladirección del eje q (+90 ó –90), marcará el sentido en que girará el motor al aplicar la fuerzaexterna. El flujo causado por la velocidad de cambio en el voltaje (speed voltage), esllamado flujo en el eje de cuadratura ( φq ) y se produce en los conductores del rotor alcortar éstos el flujo de los polos principales (φd). Bajo estas circunstancias, en el rotor seinduce una fem que siempre estará en fase con d y que da origen a una corriente encuadratura, tal y como se muestra en la Fig. No. 3. La Fig.No.3 muestra la evolucióntemporal de los dos flujos (φd y φq) y la generación del par resultante no nulo en el motormonofásico a partir de la existencia del campo en cuadratura originado, en este caso poruna fuerza externa (golpe de mano). El sentido en que el motor emprenderá su marchaserá aquel en el que sea aplicada la fuerza mecánica externa.
A manera de sustituir la fuerza mecánica aplicada, se recurre a crear un campo giratorio apartir de una fuente monofásica aplicada mediante el uso de dos devanados estatóricosubicados físicamente en cuadratura, que constituyen lo que se conoce como “fase partida”y que se muestra en la Fig.No. 3. El devanado principal suple el flujo de eje directo (φd) y eldevanado auxiliar, desplazado 90 grados eléctricos con respecto al primero, suple el flujode eje en cuadratura (φq). Este último devanado es llamado “devanado de arranque”,
3
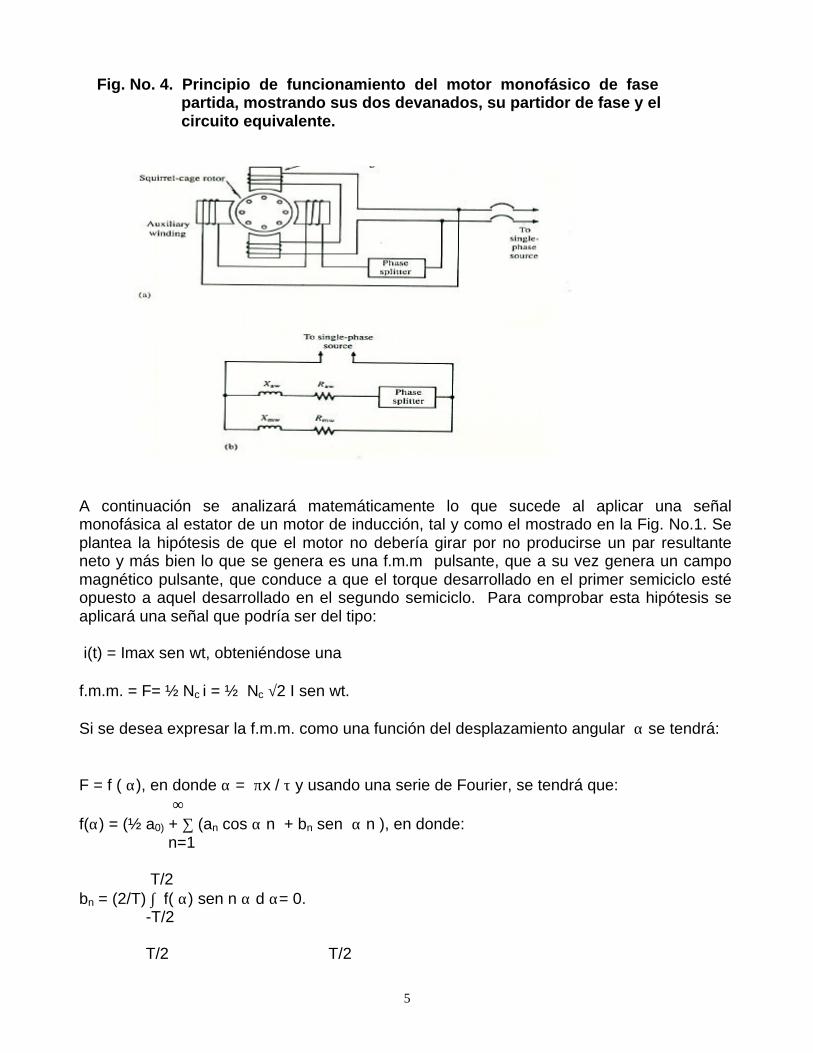
mientras el primero es llamado “devanado de marcha”. Para lograr esta partición de la fasese coloca un dispositivo denominado “partidor de fase” en serie con el devanado dearranque(Fig. No.4), de tal forma que, durante el arranque, se genere un verdadero campogiratorio en cuadratura, semejante al que se requiere para que se dé la acción del motor deinducción. Esta partición de fase se suele acompañar de una diferenciación en losparámetros típicos (X y R) de los dos devanados o incluso con la introducción decapacitores que ayuden a aumentar el ángulo de desfase entre las corrientes que, duranteel arranque, circularán por ambos devanados, pudiendo ser desconectado el devanado dearranque mediante el “partidor de fase”, que en la realidad es un interruptor centrífugo.
El par desarrollado por el motor durante el arranque (Tarr), es en este caso proporcional alproducto de las corrientes circulando, a rotor bloqueado por cada uno de los devanados(Idp, Ida) y por el seno del ángulo de desfase entre estas corrientes (α), es decir:
Tarr = K Idp Ida sen α.
El análisis de esta situación usando componentes de secuencia se hará más adelante, lomismo que el análisis del circuito equivalente y la determinación de los parámetros típicos,tanto para el rotor, como para el estator.
4
Fig. No. 3. Teoría del campo en cuadratura y acción del motor de Inducción. Motor monofásico
5
Fig. No. 4. Principio de funcionamiento del motor monofásico de fase partida, mostrando sus dos devanados, su partidor de fase y el circuito equivalente.
A continuación se analizará matemáticamente lo que sucede al aplicar una señalmonofásica al estator de un motor de inducción, tal y como el mostrado en la Fig. No.1. Seplantea la hipótesis de que el motor no debería girar por no producirse un par resultanteneto y más bien lo que se genera es una f.m.m pulsante, que a su vez genera un campomagnético pulsante, que conduce a que el torque desarrollado en el primer semiciclo estéopuesto a aquel desarrollado en el segundo semiciclo. Para comprobar esta hipótesis seaplicará una señal que podría ser del tipo:
i(t) = Imax sen wt, obteniéndose una
f.m.m. = F= ½ Nc i = ½ Nc √2 I sen wt.
Si se desea expresar la f.m.m. como una función del desplazamiento angular α se tendrá:
F = f ( α), en donde α = πx / τ y usando una serie de Fourier, se tendrá que: ∞f(α) = (½ a0) + ∑ (an cos α n + bn sen α n ), en donde: n=1
T/2bn = (2/T) ∫ f( α) sen n α d α= 0. -T/2
T/2 T/2

6
T/2 T/2an = (2/T) ∫ f( α) cos n α d α= (4/T) ∫ f (α ) cos n α d α. -T/2 0 T/2 π/2a0 = (4/T) ∫ f (α ) d α = (4/π) ∫ F d α = 0. 0 0
an = (4/ π) φ (-1) ½ (n-1) / n, para n impar (1,3,5,....) ∞ ∞f(α ) = ∑an cos n α = ∑ (4/π) φ (-1) ½ (n-1)/n cos nα n=1,3,.. n=1,3,..
∞f(α ) = 4/π Nc√2 I sen wt(∑ (-1) ½ (n-1)/n) cos n α= n=1,3,...
f(α ) = 0.9 Nc I sen wt cosα - 1/3 cos 3 α + 1/5 cos5α - ......
fundamental armónicos impares
si se desprecia el efecto armónico, se tiene que:
f ( α ) = 0.9 Nc I sen wt cos α, o sea
f (x) = ½ Fm sen (wt – (π x / τ) ) + ½ Fm sen (wt + (π x / τ) )
f+ (x) f- (x)
Si se define ϕ(x,t) = (wt -/+ (πx / τ)) y se recurre a la representación de la velocidad depropagación de un punto de fase constante, se tiene que:
V = δx/δt | ϕ = -(δϕ / δt) x / (δϕ / δx) t, entonces para el caso en que
ϕ (x,t) = (wt – (π x / τ)), (δϕ / δt) x = w , y (δϕ / δx) t = - π / τ.
v= w / (π / τ); para una máquina de dos polos π = τ y por ende,
v = +w (levogiro).
Para ϕ (x,t) = (wt + (πx/ τ)), se tiene que v = - w (dextrogiro).
7
II - ALGUNAS NOTAS GENERALES SOBRE:
a. MOTORES MONOFASICOS DE FASE PARTIDA.
1. El motor de fase partida con arranque por diferencia de resistencias.
Tal y como ya ha sido mencionado anteriormente, el estator de un motor de fase partidarequiere de la presencia de dos devanados (de marcha y de arranque) conectadoseléctricamente en paralelo, desplazados espacialmente 90 grados mecánicos y algo menosde 90 grados eléctricos en el tiempo. Estos devanados son los que permiten el arranquedel motor, sacándolo del punto muerto mediante la formación de un campo magnéticobifásico no pulsante. El rotor, al igual que para la mayoría de los motores trifásicos deinducción, es una jaula de ardilla.Para el caso que nos ocupa, el devanado de arranque (DA) tiene menos número de espirasde alambre fino, por lo que su resistencia es elevada y su reactancia resulta reducida. Eldevanado de marcha (DM), por lo contrario, tiene muchas espiras de alambre mucho másgrueso, siendo su resistencia mucho más baja y su reactancia más elevada, es decir, queante un voltaje referencial, las corrientes que circulan por cada uno de los dos devanadosno estarán en fase por las marcadas diferencias en los aspectos constructivos. Por eldevanado de marcha siempre tiende a circular una corriente de mayor magnitud que aquellaque circula por el devanado de arranque. Sin embargo, dado el desfase existente entreambas corrientes y dado el desfase espacial de los dos devanados, al conectar el motor,realmente se generará un campo magnético bifásico que permitirá el desarrollo de un torquede arranque resultante no nulo, que a su vez permitirá que el motor parta del reposo. Elsentido de aceleración siempre será el mismo sentido en que gire el campo magnéticogiratorio producido por ambas corrientes, de tal forma que, este tipo de motor esconsiderado como no reversible pero sí inversible (requiere desconexión total de la fuente yacciones conectivas).Con el fin de poder desconectar el devanado de arranque, después de cumplida su función,se ha ideado un interruptor de acción mecánica (IC), cuyo estado cambia por la acción de lafuerza centrífuga. Al arrancar el motor este IC debe abrirse más o menos cuando eldeslizamiento (s) haya alcanzado el valor del 25 %. Naturalmente que el IC permanececerrado durante el reposo y se abre después de haber alcanzado un 75 % (s= 0.25) de lavelocidad nominal por dos razones, a saber: el torque desarrollado por el campo giratorioen el DM es mayor que el torque desarrollado por ambos devanados a un valor de s del 15% y por lo tanto, los dos devanados nunca deben permanecer conectados al alcanzar elmotor el 85 % de la velocidad nominal, al quedar conectado sólo el DM, la corriente totalque durante el arranque es igual a la suma fasorial de las dos corrientes, se ve reducida a lacorriente circulando únicamente por el DM, por lo que, las pérdidas por efecto Joule severán reducidas. Este IC puede ser sustituido por interruptor de estado sólido (triac) o porun relevador de contactos magnéticos.Si al arrancar el motor, el IC no se abre, el excesivo calor generado por la alta resistenciadel DA hará que la temperatura del estator aumente, pudiendo llegar a quemarse susdevanados. Tal y como ya se afirmó, una vez que el motor acelera y alcanza el 75 % de suvelocidad nominal, el IC se abre, de tal forma que la corriente tomada de la red disminuyedrásticamente, pudiendo comprobarse el funcionamiento normal del IC hasta con una pinzao gancho amperimétrico.
8
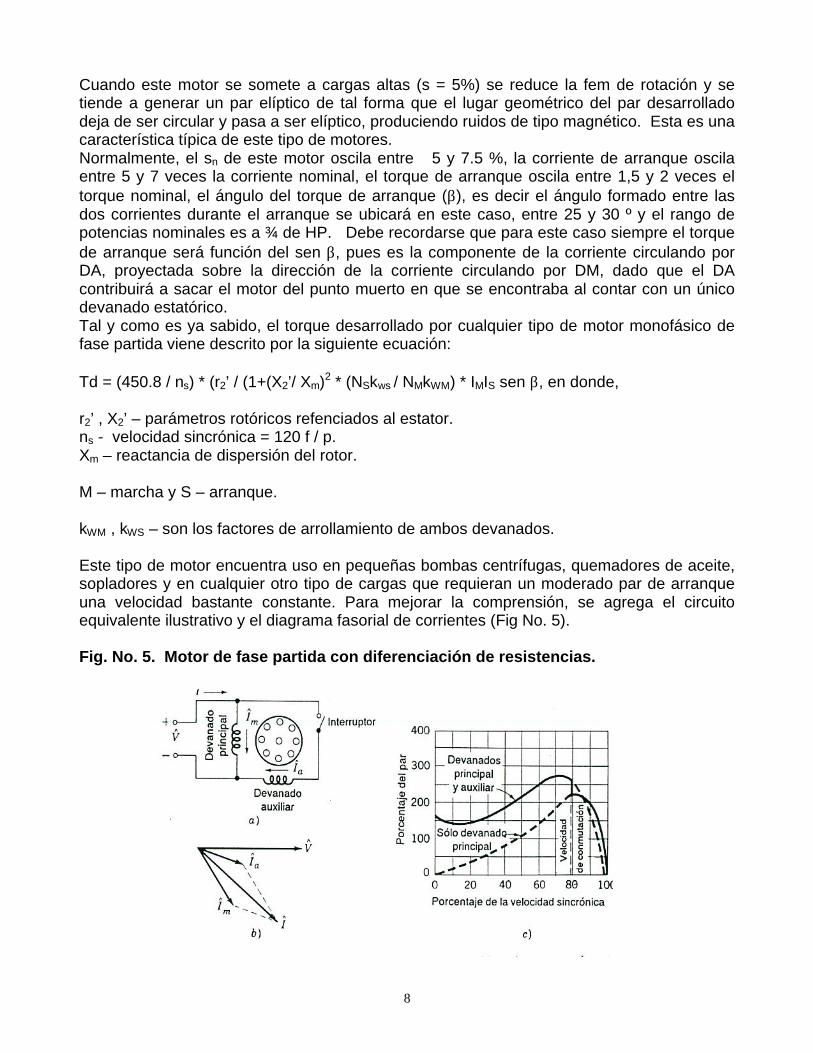
Cuando este motor se somete a cargas altas (s = 5%) se reduce la fem de rotación y setiende a generar un par elíptico de tal forma que el lugar geométrico del par desarrolladodeja de ser circular y pasa a ser elíptico, produciendo ruidos de tipo magnético. Esta es unacaracterística típica de este tipo de motores.Normalmente, el sn de este motor oscila entre 5 y 7.5 %, la corriente de arranque oscilaentre 5 y 7 veces la corriente nominal, el torque de arranque oscila entre 1,5 y 2 veces eltorque nominal, el ángulo del torque de arranque (β), es decir el ángulo formado entre lasdos corrientes durante el arranque se ubicará en este caso, entre 25 y 30 º y el rango depotencias nominales es a ¾ de HP. Debe recordarse que para este caso siempre el torquede arranque será función del sen β, pues es la componente de la corriente circulando porDA, proyectada sobre la dirección de la corriente circulando por DM, dado que el DAcontribuirá a sacar el motor del punto muerto en que se encontraba al contar con un únicodevanado estatórico.Tal y como es ya sabido, el torque desarrollado por cualquier tipo de motor monofásico defase partida viene descrito por la siguiente ecuación:
Td = (450.8 / ns) * (r2’ / (1+(X2’/ Xm)2 * (NSkws / NMkWM) * IMIS sen β, en donde,
r2’ , X2’ – parámetros rotóricos refenciados al estator.ns - velocidad sincrónica = 120 f / p.Xm – reactancia de dispersión del rotor.
M – marcha y S – arranque.
kWM , kWS – son los factores de arrollamiento de ambos devanados.
Este tipo de motor encuentra uso en pequeñas bombas centrífugas, quemadores de aceite,sopladores y en cualquier otro tipo de cargas que requieran un moderado par de arranqueuna velocidad bastante constante. Para mejorar la comprensión, se agrega el circuitoequivalente ilustrativo y el diagrama fasorial de corrientes (Fig No. 5).
Fig. No. 5. Motor de fase partida con diferenciación de resistencias.
9
2. El motor de fase partida con arranque por capacitor intermitente.
A fin de mejorar el torque desarrollado durante el arranque del motor antes descrito, seintercala un capacitor de areranque (CA) en serie con el DA, de tal forma que el ángulo βaumente considerablemente (entre 75º y 88 º) y por ende aumente el sen β. Todos losdemás aspectos constructivos del motor permanecen inalterados y ahora el IC sacará elcircuito serie formado por del DA y el CA. En este caso, si el IC no se abre al arrancar elmotor significa que también el CA corre peligro, por lo que el mantenimiento preventivo esaún más importante que antes.
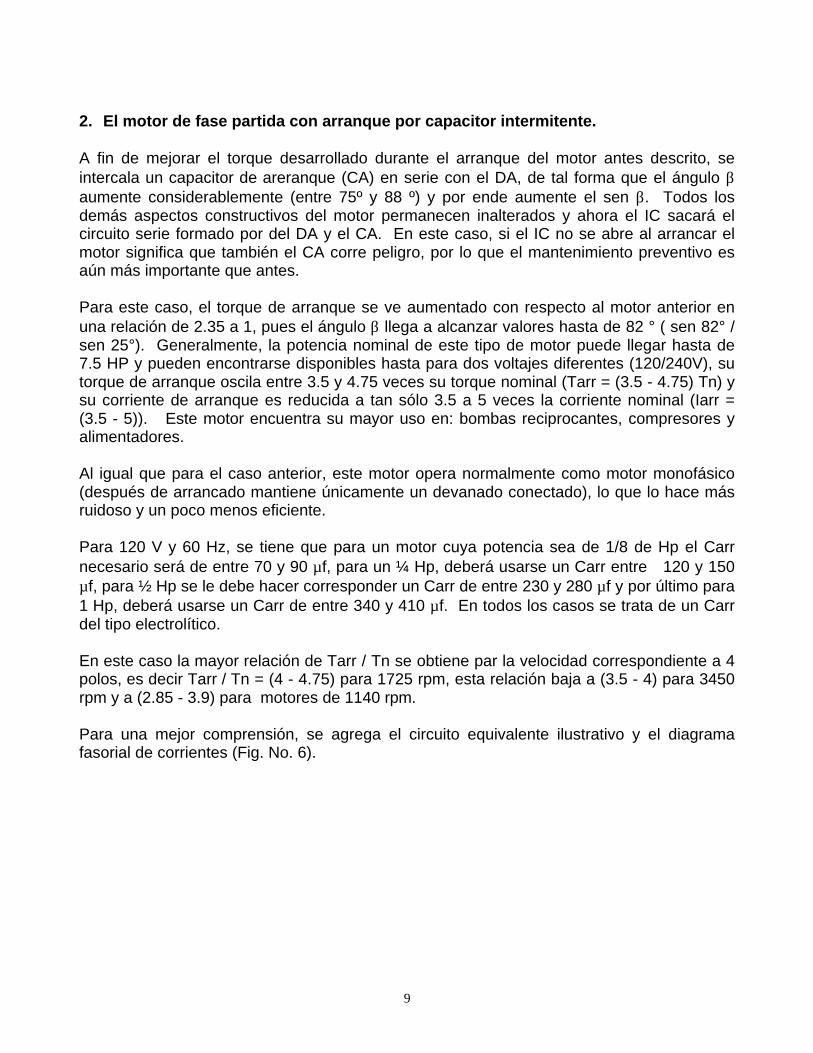
Para este caso, el torque de arranque se ve aumentado con respecto al motor anterior enuna relación de 2.35 a 1, pues el ángulo β llega a alcanzar valores hasta de 82 ° ( sen 82° /sen 25°). Generalmente, la potencia nominal de este tipo de motor puede llegar hasta de7.5 HP y pueden encontrarse disponibles hasta para dos voltajes diferentes (120/240V), sutorque de arranque oscila entre 3.5 y 4.75 veces su torque nominal (Tarr = (3.5 - 4.75) Tn) ysu corriente de arranque es reducida a tan sólo 3.5 a 5 veces la corriente nominal (Iarr =(3.5 - 5)). Este motor encuentra su mayor uso en: bombas reciprocantes, compresores yalimentadores.
Al igual que para el caso anterior, este motor opera normalmente como motor monofásico(después de arrancado mantiene únicamente un devanado conectado), lo que lo hace másruidoso y un poco menos eficiente.
Para 120 V y 60 Hz, se tiene que para un motor cuya potencia sea de 1/8 de Hp el Carrnecesario será de entre 70 y 90 µf, para un ¼ Hp, deberá usarse un Carr entre 120 y 150µf, para ½ Hp se le debe hacer corresponder un Carr de entre 230 y 280 µf y por último para1 Hp, deberá usarse un Carr de entre 340 y 410 µf. En todos los casos se trata de un Carrdel tipo electrolítico.
En este caso la mayor relación de Tarr / Tn se obtiene par la velocidad correspondiente a 4polos, es decir Tarr / Tn = (4 - 4.75) para 1725 rpm, esta relación baja a (3.5 - 4) para 3450rpm y a (2.85 - 3.9) para motores de 1140 rpm.
Para una mejor comprensión, se agrega el circuito equivalente ilustrativo y el diagramafasorial de corrientes (Fig. No. 6).
10
Fig. No. 6. Motor de fase partida arrancando mediante capacitor.
3. El motor de fase partida con capacitor permanente.
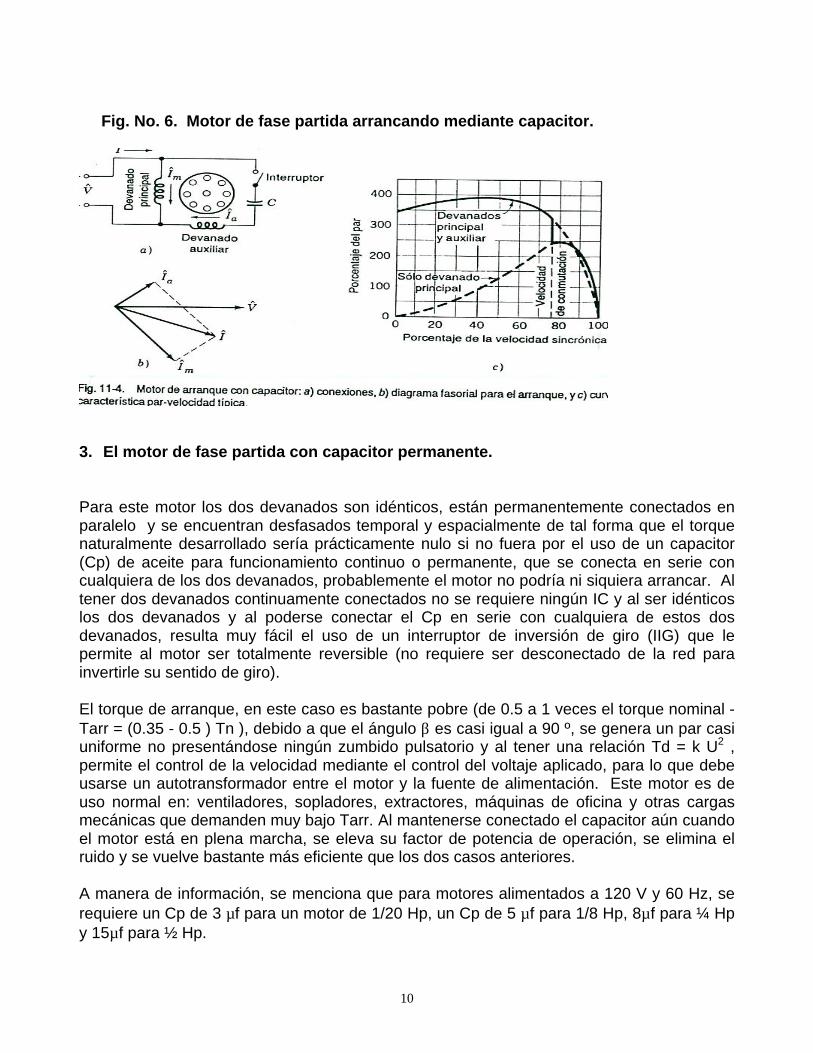
Para este motor los dos devanados son idénticos, están permanentemente conectados enparalelo y se encuentran desfasados temporal y espacialmente de tal forma que el torquenaturalmente desarrollado sería prácticamente nulo si no fuera por el uso de un capacitor(Cp) de aceite para funcionamiento continuo o permanente, que se conecta en serie concualquiera de los dos devanados, probablemente el motor no podría ni siquiera arrancar. Altener dos devanados continuamente conectados no se requiere ningún IC y al ser idénticoslos dos devanados y al poderse conectar el Cp en serie con cualquiera de estos dosdevanados, resulta muy fácil el uso de un interruptor de inversión de giro (IIG) que lepermite al motor ser totalmente reversible (no requiere ser desconectado de la red parainvertirle su sentido de giro).
El torque de arranque, en este caso es bastante pobre (de 0.5 a 1 veces el torque nominal -Tarr = (0.35 - 0.5 ) Tn ), debido a que el ángulo β es casi igual a 90 º, se genera un par casiuniforme no presentándose ningún zumbido pulsatorio y al tener una relación Td = k U2 ,permite el control de la velocidad mediante el control del voltaje aplicado, para lo que debeusarse un autotransformador entre el motor y la fuente de alimentación. Este motor es deuso normal en: ventiladores, sopladores, extractores, máquinas de oficina y otras cargasmecánicas que demanden muy bajo Tarr. Al mantenerse conectado el capacitor aún cuandoel motor está en plena marcha, se eleva su factor de potencia de operación, se elimina elruido y se vuelve bastante más eficiente que los dos casos anteriores.
A manera de información, se menciona que para motores alimentados a 120 V y 60 Hz, serequiere un Cp de 3 µf para un motor de 1/20 Hp, un Cp de 5 µf para 1/8 Hp, 8µf para ¼ Hpy 15µf para ½ Hp.
11
Para una mejor comprensión, se agrega (Fig No. 7) el circuito equivalente ilustrativo y eldiagrama fasorial de corrientes.
Fig. No. 7. Motor de fase partida con capacitor permanente.
4. El motor de fase partida con doble capacitor.
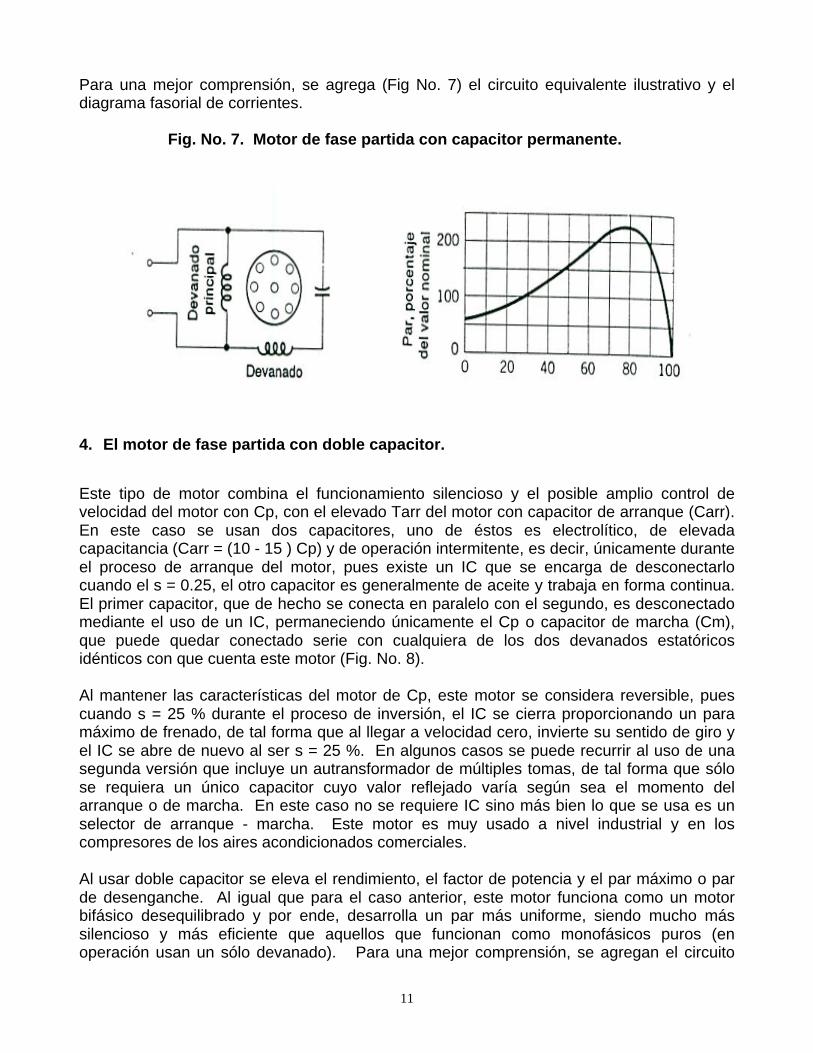
Este tipo de motor combina el funcionamiento silencioso y el posible amplio control develocidad del motor con Cp, con el elevado Tarr del motor con capacitor de arranque (Carr).En este caso se usan dos capacitores, uno de éstos es electrolítico, de elevadacapacitancia (Carr = (10 - 15 ) Cp) y de operación intermitente, es decir, únicamente duranteel proceso de arranque del motor, pues existe un IC que se encarga de desconectarlocuando el s = 0.25, el otro capacitor es generalmente de aceite y trabaja en forma continua.El primer capacitor, que de hecho se conecta en paralelo con el segundo, es desconectadomediante el uso de un IC, permaneciendo únicamente el Cp o capacitor de marcha (Cm),que puede quedar conectado serie con cualquiera de los dos devanados estatóricosidénticos con que cuenta este motor (Fig. No. 8).
Al mantener las características del motor de Cp, este motor se considera reversible, puescuando s = 25 % durante el proceso de inversión, el IC se cierra proporcionando un paramáximo de frenado, de tal forma que al llegar a velocidad cero, invierte su sentido de giro yel IC se abre de nuevo al ser s = 25 %. En algunos casos se puede recurrir al uso de unasegunda versión que incluye un autransformador de múltiples tomas, de tal forma que sólose requiera un único capacitor cuyo valor reflejado varía según sea el momento delarranque o de marcha. En este caso no se requiere IC sino más bien lo que se usa es unselector de arranque - marcha. Este motor es muy usado a nivel industrial y en loscompresores de los aires acondicionados comerciales.
Al usar doble capacitor se eleva el rendimiento, el factor de potencia y el par máximo o parde desenganche. Al igual que para el caso anterior, este motor funciona como un motorbifásico desequilibrado y por ende, desarrolla un par más uniforme, siendo mucho mássilencioso y más eficiente que aquellos que funcionan como monofásicos puros (enoperación usan un sólo devanado). Para una mejor comprensión, se agregan el circuito
12
equivalente ilustrativo para cuando se usan dos capacitores físicamente separados, pues laotra opción es menos usada (Fig. no.8).
Fig. No. 8. Motor de fase partida con doble capacitor.
b. EL MOTOR DE ESPIRA DE SOMBRA O POLOS SOMBREADOS.
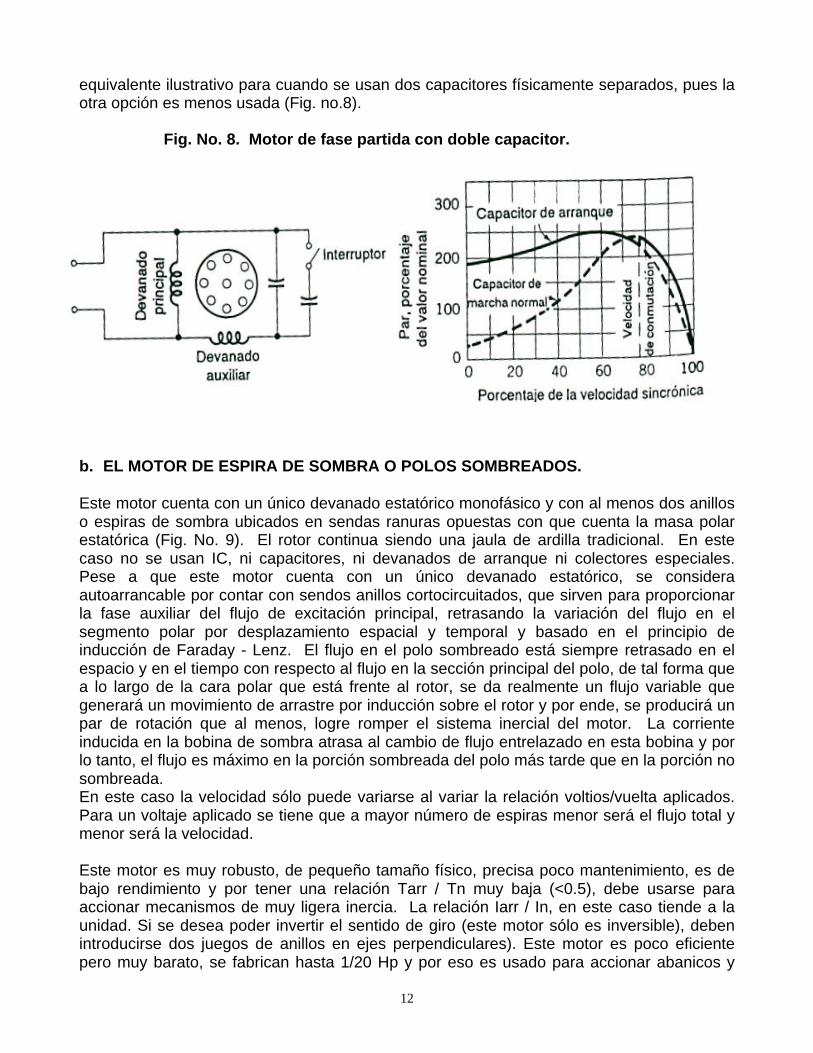
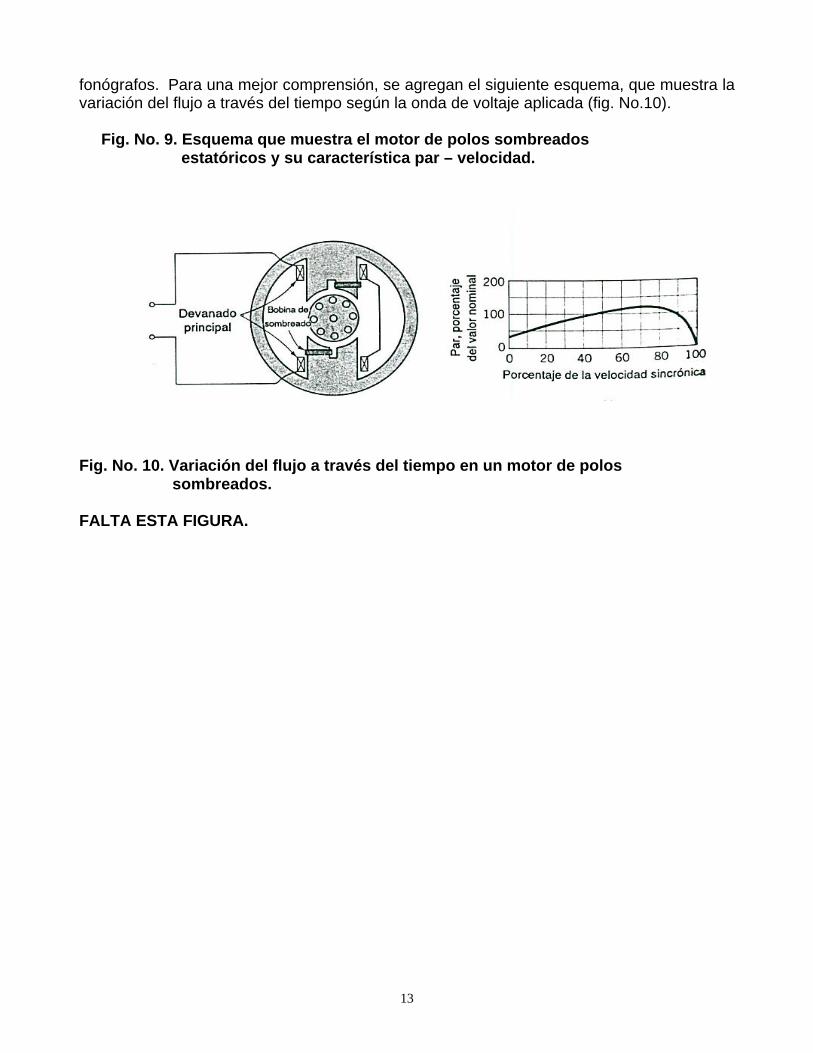
Este motor cuenta con un único devanado estatórico monofásico y con al menos dos anilloso espiras de sombra ubicados en sendas ranuras opuestas con que cuenta la masa polarestatórica (Fig. No. 9). El rotor continua siendo una jaula de ardilla tradicional. En estecaso no se usan IC, ni capacitores, ni devanados de arranque ni colectores especiales.Pese a que este motor cuenta con un único devanado estatórico, se consideraautoarrancable por contar con sendos anillos cortocircuitados, que sirven para proporcionarla fase auxiliar del flujo de excitación principal, retrasando la variación del flujo en elsegmento polar por desplazamiento espacial y temporal y basado en el principio deinducción de Faraday - Lenz. El flujo en el polo sombreado está siempre retrasado en elespacio y en el tiempo con respecto al flujo en la sección principal del polo, de tal forma quea lo largo de la cara polar que está frente al rotor, se da realmente un flujo variable quegenerará un movimiento de arrastre por inducción sobre el rotor y por ende, se producirá unpar de rotación que al menos, logre romper el sistema inercial del motor. La corrienteinducida en la bobina de sombra atrasa al cambio de flujo entrelazado en esta bobina y porlo tanto, el flujo es máximo en la porción sombreada del polo más tarde que en la porción nosombreada.En este caso la velocidad sólo puede variarse al variar la relación voltios/vuelta aplicados.Para un voltaje aplicado se tiene que a mayor número de espiras menor será el flujo total ymenor será la velocidad.
Este motor es muy robusto, de pequeño tamaño físico, precisa poco mantenimiento, es debajo rendimiento y por tener una relación Tarr / Tn muy baja (<0.5), debe usarse paraaccionar mecanismos de muy ligera inercia. La relación Iarr / In, en este caso tiende a launidad. Si se desea poder invertir el sentido de giro (este motor sólo es inversible), debenintroducirse dos juegos de anillos en ejes perpendiculares). Este motor es poco eficientepero muy barato, se fabrican hasta 1/20 Hp y por eso es usado para accionar abanicos y
13
fonógrafos. Para una mejor comprensión, se agregan el siguiente esquema, que muestra lavariación del flujo a través del tiempo según la onda de voltaje aplicada (fig. No.10).
Fig. No. 9. Esquema que muestra el motor de polos sombreados estatóricos y su característica par – velocidad.
Fig. No. 10. Variación del flujo a través del tiempo en un motor de polos sombreados.
FALTA ESTA FIGURA.
14
c. MOTOR DE RELUCTANCIA VARIABLE CON ARRANQUE PROPIO.
El funcionamiento de este motor se basa en que la reluctancia del entrehierro sea unafunción de la posición angular del rotor con respecto al eje del devanado estatórico,generando un par de reluctancia cuando el rotor gire a velocidad sincrónica (ns) (este motorse considera sincrónico, pese a que arranca como motor de inducción). Si a un rotor jaulade ardilla tradicional se le quitan algunos dientes, dejando intactas las barras y los anillosextremos, tal y como se muestra en la figura adjunta y si se usa cualquiera de los sistemasestatóricos de cualquiera de las máquinas antes descritas, el motor arrancará por sí solocomo un motor de inducción y en presencia de bajas cargas, se acelerará hasta alcanzar unbajo valor de deslizamiento.
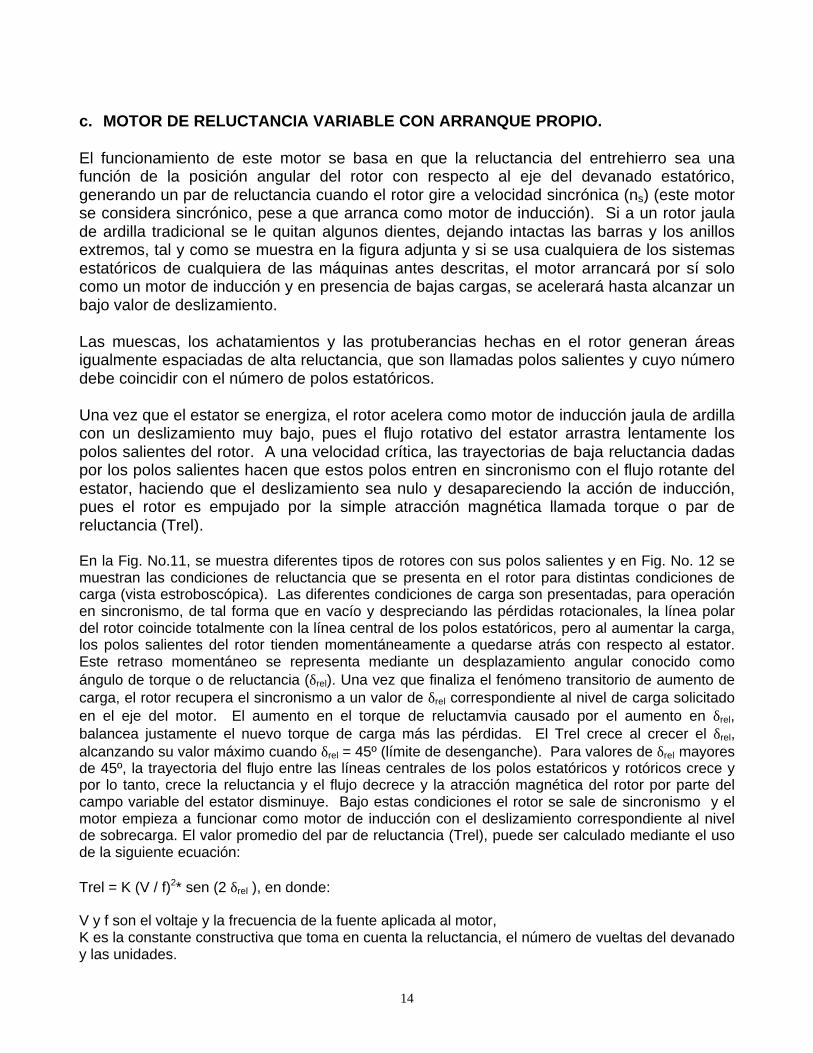
Las muescas, los achatamientos y las protuberancias hechas en el rotor generan áreasigualmente espaciadas de alta reluctancia, que son llamadas polos salientes y cuyo númerodebe coincidir con el número de polos estatóricos.
Una vez que el estator se energiza, el rotor acelera como motor de inducción jaula de ardillacon un deslizamiento muy bajo, pues el flujo rotativo del estator arrastra lentamente lospolos salientes del rotor. A una velocidad crítica, las trayectorias de baja reluctancia dadaspor los polos salientes hacen que estos polos entren en sincronismo con el flujo rotante delestator, haciendo que el deslizamiento sea nulo y desapareciendo la acción de inducción,pues el rotor es empujado por la simple atracción magnética llamada torque o par dereluctancia (Trel).
En la Fig. No.11, se muestra diferentes tipos de rotores con sus polos salientes y en Fig. No. 12 semuestran las condiciones de reluctancia que se presenta en el rotor para distintas condiciones decarga (vista estroboscópica). Las diferentes condiciones de carga son presentadas, para operaciónen sincronismo, de tal forma que en vacío y despreciando las pérdidas rotacionales, la línea polardel rotor coincide totalmente con la línea central de los polos estatóricos, pero al aumentar la carga,los polos salientes del rotor tienden momentáneamente a quedarse atrás con respecto al estator.Este retraso momentáneo se representa mediante un desplazamiento angular conocido comoángulo de torque o de reluctancia (δrel). Una vez que finaliza el fenómeno transitorio de aumento decarga, el rotor recupera el sincronismo a un valor de δrel correspondiente al nivel de carga solicitadoen el eje del motor. El aumento en el torque de reluctamvia causado por el aumento en δrel,balancea justamente el nuevo torque de carga más las pérdidas. El Trel crece al crecer el δrel,alcanzando su valor máximo cuando δrel = 45º (límite de desenganche). Para valores de δrel mayoresde 45º, la trayectoria del flujo entre las líneas centrales de los polos estatóricos y rotóricos crece ypor lo tanto, crece la reluctancia y el flujo decrece y la atracción magnética del rotor por parte delcampo variable del estator disminuye. Bajo estas condiciones el rotor se sale de sincronismo y elmotor empieza a funcionar como motor de inducción con el deslizamiento correspondiente al nivelde sobrecarga. El valor promedio del par de reluctancia (Trel), puede ser calculado mediante el usode la siguiente ecuación:
Trel = K (V / f)2* sen (2 δrel ), en donde:
V y f son el voltaje y la frecuencia de la fuente aplicada al motor,K es la constante constructiva que toma en cuenta la reluctancia, el número de vueltas del devanadoy las unidades.
15
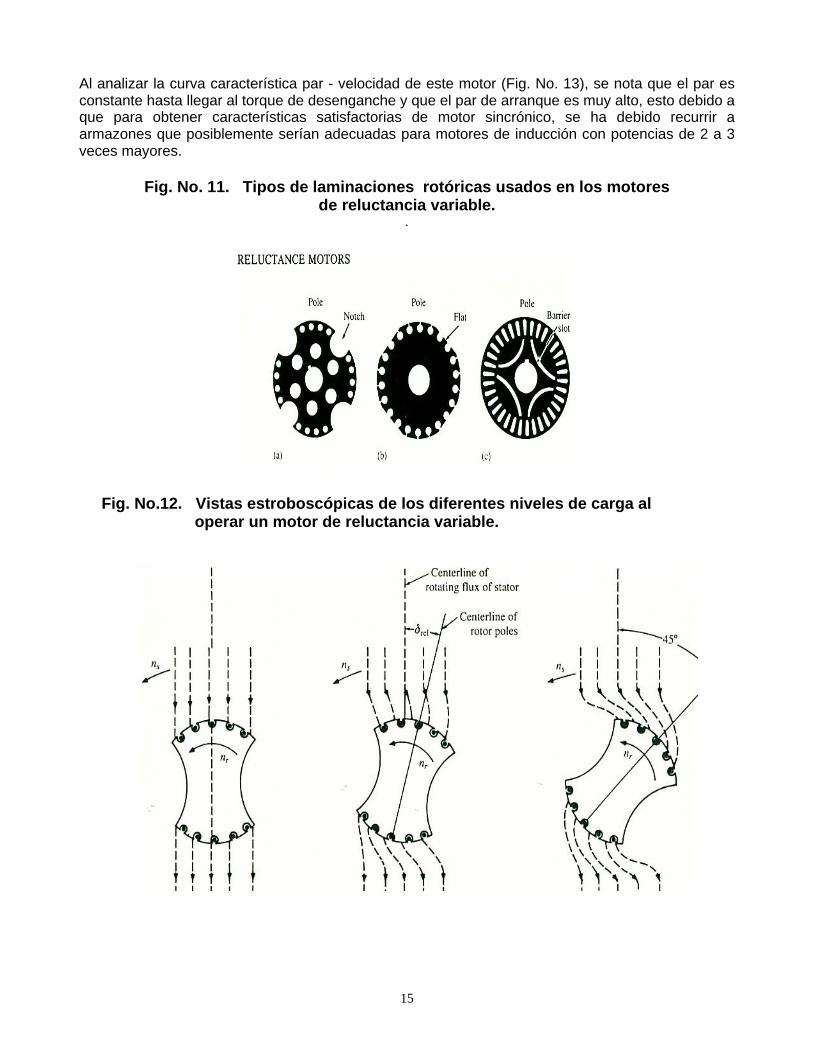
Al analizar la curva característica par - velocidad de este motor (Fig. No. 13), se nota que el par esconstante hasta llegar al torque de desenganche y que el par de arranque es muy alto, esto debido aque para obtener características satisfactorias de motor sincrónico, se ha debido recurrir aarmazones que posiblemente serían adecuadas para motores de inducción con potencias de 2 a 3veces mayores.
Fig. No. 11. Tipos de laminaciones rotóricas usados en los motoresde reluctancia variable.
.
Fig. No.12. Vistas estroboscópicas de los diferentes niveles de carga al operar un motor de reluctancia variable.
16
Fig. No. 13. Característica par – velocidad para el motor de reluctancia variable.
MOTOR DE HISTERESIS.
El estator de este motor es del mismo tipo que el de un motor de inducción. El rotor es uncilindro compacto hecho de una aleación muy dura que equivale a un imán o magnetopermanente, soportado en estructuras no magnéticas.
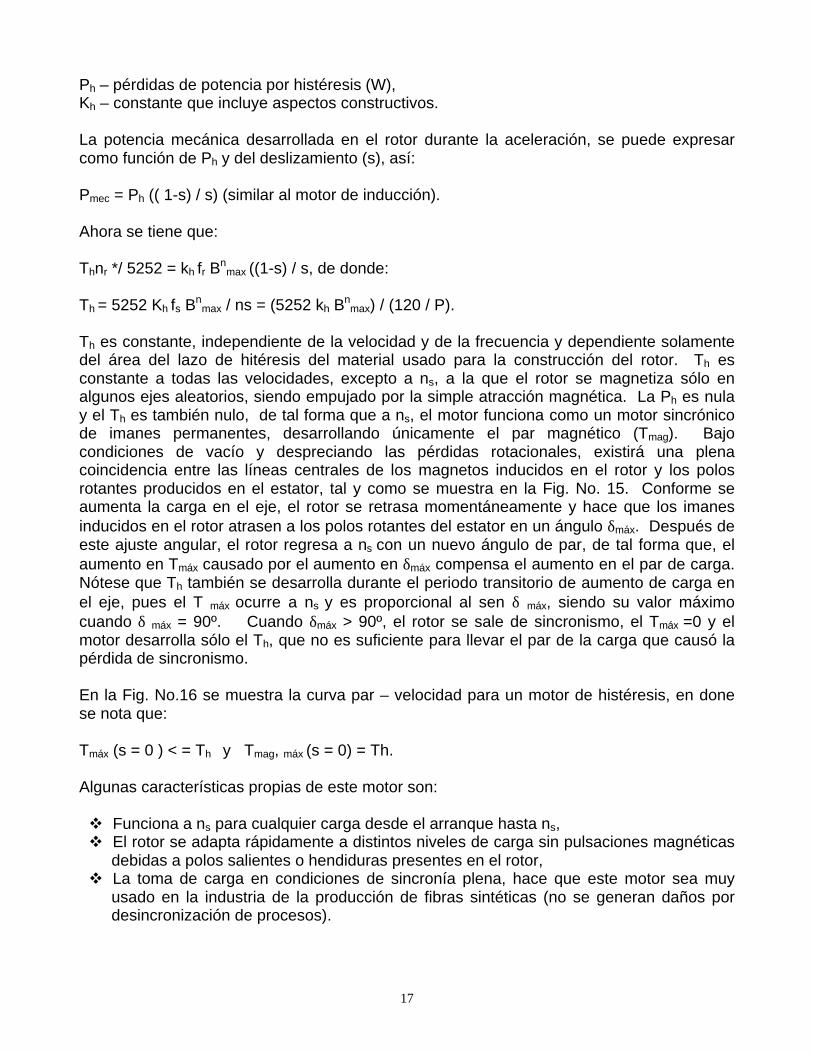
Para comprender el principio de funcionamiento, se usará la figura adjunta ( Fig. No. 14),donde los imanes representan la fuente del flujo estatórico, que sirve para inducirpolaridades magnéticas opuestas en la dura estructura aleada del rotor. Con los imanesestacionarios (en vacío), el eje magnético de los polos del rotor coinciden totalmente con eleje magnético de los polos del estator. Rotando los imanes estatóricos con el rotorbloqueado, se genera un flujo magnético giratorio que provoca un torqque en los polosmagnéticos inducidos del rotor. Al igual que rotan los polos del estator, los polos del rotorestán yendo constantemente hacia nuevas posiciones, siguiendo la dirección del flujorotativo. Dado el fenómeno de la histéresis, siempre los polos del rotor atrasarán a los polosdel estator en un ángulo δh . El ángulo δh constante se traduce en una fuerza constante deatracción y por ende, en un par constante de aceleración, que bajo condiciones de carganormal, acelerará al rotor a la velocidad sincrónica.
La energía transferible por el flujo rotativo del estator hacia el rotor, es en forma de energíade histéresis y a rotor bloqueado se libera como pérdida de calor, que viene dada por:
Ph = Kh fr Bn
max , en donde;
fr – frecuencia del flujo reversado en el rotor (Hz),Bmax - valor máximo de la densidad de flujo en el entrehierro (T/m2),
17
Ph – pérdidas de potencia por histéresis (W),Kh – constante que incluye aspectos constructivos.
La potencia mecánica desarrollada en el rotor durante la aceleración, se puede expresarcomo función de Ph y del deslizamiento (s), así:
Pmec = Ph (( 1-s) / s) (similar al motor de inducción).
Ahora se tiene que:
Thnr */ 5252 = kh fr Bn
max ((1-s) / s, de donde:
Th = 5252 Kh fs Bn
max / ns = (5252 kh Bnmax) / (120 / P).
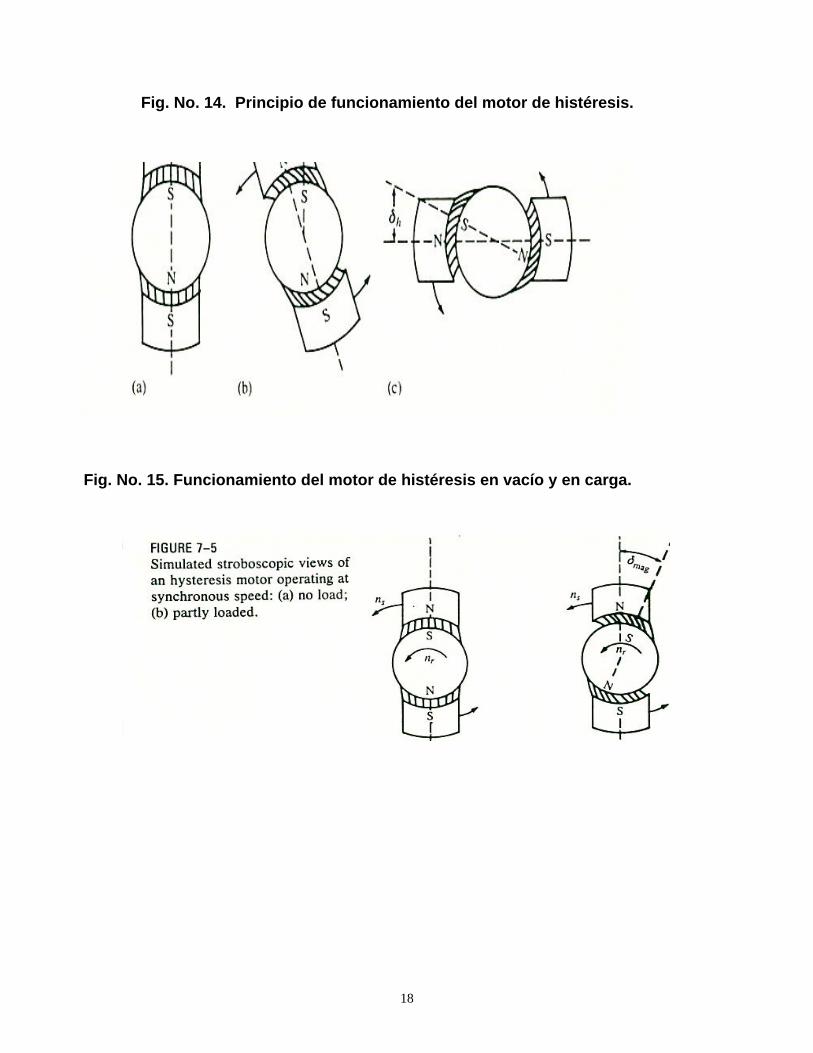
Th es constante, independiente de la velocidad y de la frecuencia y dependiente solamentedel área del lazo de hitéresis del material usado para la construcción del rotor. Th esconstante a todas las velocidades, excepto a ns, a la que el rotor se magnetiza sólo enalgunos ejes aleatorios, siendo empujado por la simple atracción magnética. La Ph es nulay el Th es también nulo, de tal forma que a ns, el motor funciona como un motor sincrónicode imanes permanentes, desarrollando únicamente el par magnético (Tmag). Bajocondiciones de vacío y despreciando las pérdidas rotacionales, existirá una plenacoincidencia entre las líneas centrales de los magnetos inducidos en el rotor y los polosrotantes producidos en el estator, tal y como se muestra en la Fig. No. 15. Conforme seaumenta la carga en el eje, el rotor se retrasa momentáneamente y hace que los imanesinducidos en el rotor atrasen a los polos rotantes del estator en un ángulo δmáx. Después deeste ajuste angular, el rotor regresa a ns con un nuevo ángulo de par, de tal forma que, elaumento en Tmáx causado por el aumento en δmáx compensa el aumento en el par de carga.Nótese que Th también se desarrolla durante el periodo transitorio de aumento de carga enel eje, pues el T máx ocurre a ns y es proporcional al sen δ máx, siendo su valor máximocuando δ máx = 90º. Cuando δmáx > 90º, el rotor se sale de sincronismo, el Tmáx =0 y elmotor desarrolla sólo el Th, que no es suficiente para llevar el par de la carga que causó lapérdida de sincronismo.
En la Fig. No.16 se muestra la curva par – velocidad para un motor de histéresis, en donese nota que:
Tmáx (s = 0 ) < = Th y Tmag, máx (s = 0) = Th.
Algunas características propias de este motor son:
v Funciona a ns para cualquier carga desde el arranque hasta ns,v El rotor se adapta rápidamente a distintos niveles de carga sin pulsaciones magnéticas
debidas a polos salientes o hendiduras presentes en el rotor,v La toma de carga en condiciones de sincronía plena, hace que este motor sea muy
usado en la industria de la producción de fibras sintéticas (no se generan daños pordesincronización de procesos).
18
Fig. No. 14. Principio de funcionamiento del motor de histéresis.
Fig. No. 15. Funcionamiento del motor de histéresis en vacío y en carga.
19
Fig. No. 16. Característica par – velocidad para el motor de histéresis.
FALTA ESTA FIGURA
d. MOTOR A PASOS.
Son motores accionados mediante pulsos altamente precisos que cambian su posiciónangular por pasos según sean los pulsos de entrada provenientes de un sistemascontrolados digitalmente. Estos motores son muy usados para accionar sistemas deposicionamiento mecánico muy preciso y pueden contar o no con sistemas deretroalimentación (sistema de maquinas – herramientas de control mediante CAD – CAM,robótica, etc.). el ángulo del paso por pulso de entrada depende de la construcción delmotor y del sistema de control usado. El ángulo total recorrido por el rotor es igual al ángulode paso por el número de pasos, de tal forma que:
θ = β x ρ, en donde
θ - ángulo total recorrido (grados),β - ángulo de paso (grados / paso),ρ - número de pasos.
n = β fp , en donde: n – velocidad del eje (rad / seg), fp – frecuencia del pulseo (pulsos / seg).
Para ilustrar la simple construcción y el principio general de construcción de un motor apasos, se usará el caso del motor a pasos de reluctancia variable (Fig No. 17 ). En estecaso, tanto el estator, como el rotor dentado son construidos con aceros suaves de muybaja retentividad magnética. Las bobinas devanadas alrededor de los dientes estatóricos
20
generan la atracción magnética que establece la posición del rotor. La reluctanciamagnética del circuito formado por los dientes del rotor y del estator varía con la posiciónangular del rotor. Energizando una o más bobinas del estator se causa avances del rotorhacia adelante o hacia atrás que dan origen a trayectorias de menor reluctancia con eldiente estatórico magnetizado.
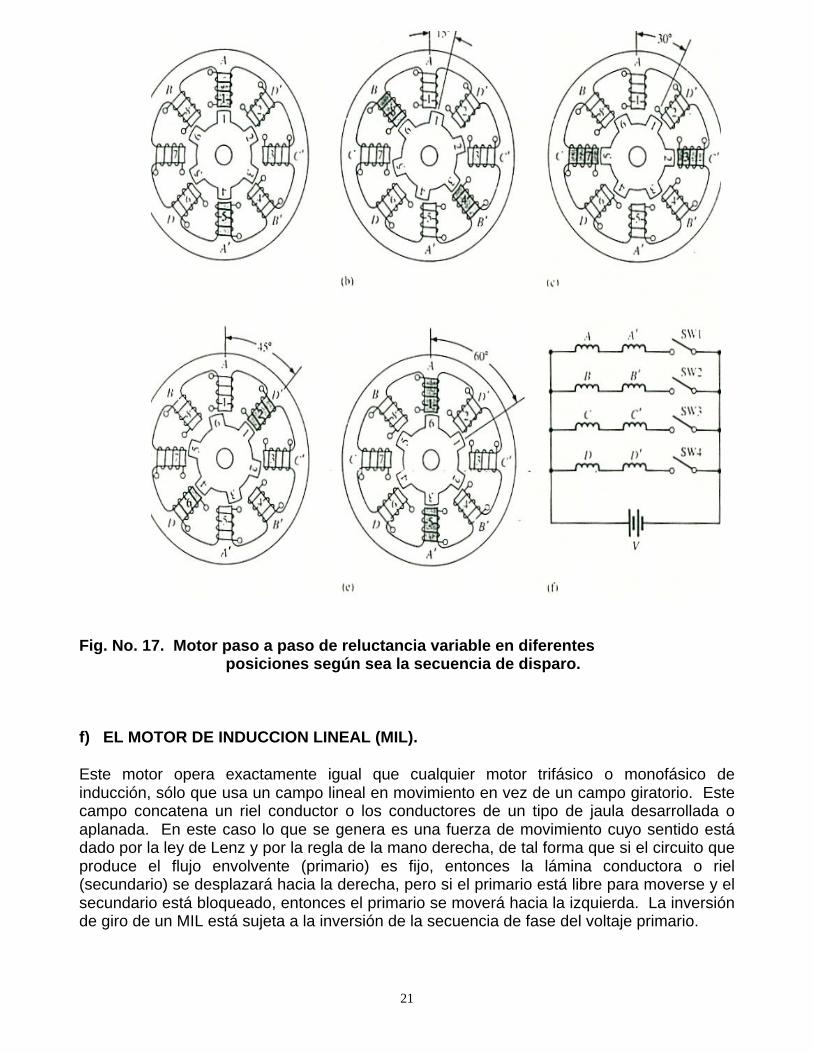
La mayoría de los motores de paso usan sistemas de alimentación secuencial, que permitenir alimentando los distintos conjuntos de bobinas devanadas sobre los distintos dientesestatóricos. Los distintos grupos de bobinas forman las llamadas fases que conmutan sualimentación en formas individual y secuencial, pudiendo darse en ambos sentidos a pasopleno o a paso parcial (medio pulso al energizar dos fases simultáneamente). En la Fig. No.17, se muestra el arreglo para un motor de pasos a reluctancia variable con 8 dientesestatóricos y 6 rotóricos, para un β de 15º / paso y dos bobinas / fase. La operación eneste caso, se ha simulado mediante el uso de un juego de interruptores manejadosecuencialmente, que accionados desde SW1 a SW4, permiten el giro CW y de SW4 aSW1, permiten el giro CCW.La relación existente entre el ángulo de paso (β), el número de dientes estatóricos (Ns) y elnúmero de dientes rotóricos (Nr), es:
β = [( Ns- Nr ) / Ns Nr] x 360.
Gracias al desarrollo de la electrónica de potencia, el motor paso a paso tiene cada día unmayor uso en sistemas mecatrónicos de posicionamiento, en armamento complejo ymoderno, en procesos repetitivos de avance y retroceso, etc.
21
Fig. No. 17. Motor paso a paso de reluctancia variable en diferentes posiciones según sea la secuencia de disparo.
f) EL MOTOR DE INDUCCION LINEAL (MIL).
Este motor opera exactamente igual que cualquier motor trifásico o monofásico deinducción, sólo que usa un campo lineal en movimiento en vez de un campo giratorio. Estecampo concatena un riel conductor o los conductores de un tipo de jaula desarrollada oaplanada. En este caso lo que se genera es una fuerza de movimiento cuyo sentido estádado por la ley de Lenz y por la regla de la mano derecha, de tal forma que si el circuito queproduce el flujo envolvente (primario) es fijo, entonces la lámina conductora o riel(secundario) se desplazará hacia la derecha, pero si el primario está libre para moverse y elsecundario está bloqueado, entonces el primario se moverá hacia la izquierda. La inversiónde giro de un MIL está sujeta a la inversión de la secuencia de fase del voltaje primario.
22
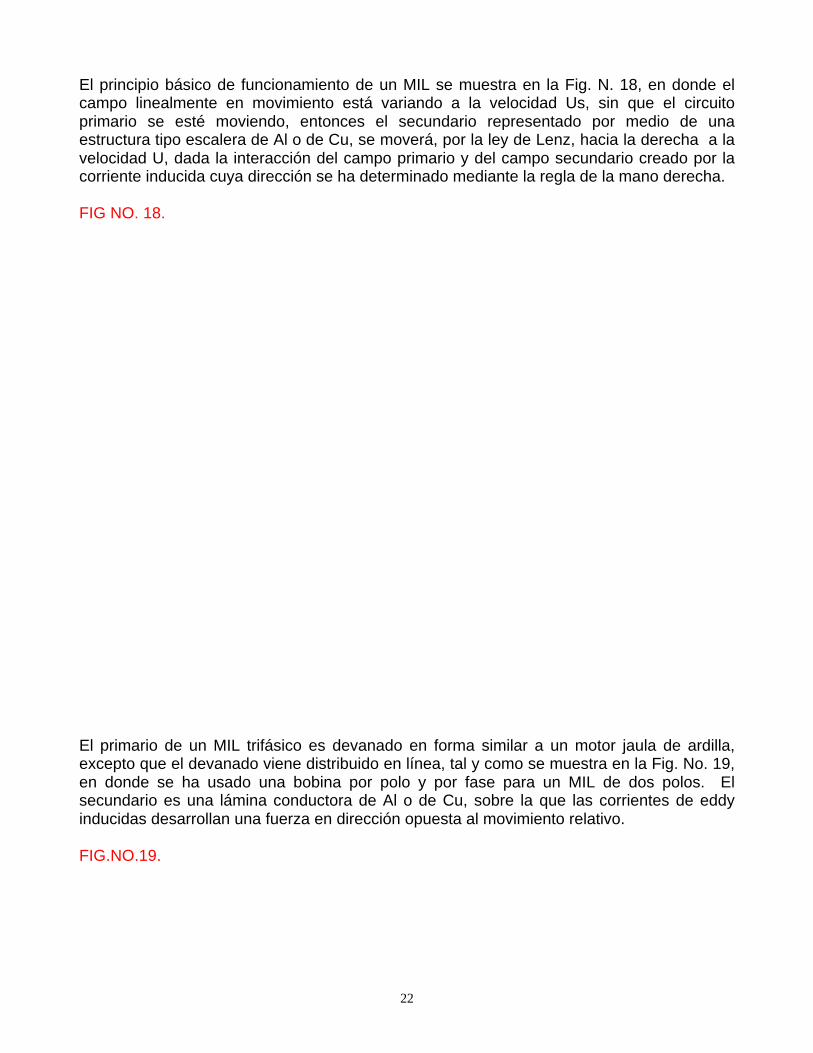
El principio básico de funcionamiento de un MIL se muestra en la Fig. N. 18, en donde elcampo linealmente en movimiento está variando a la velocidad Us, sin que el circuitoprimario se esté moviendo, entonces el secundario representado por medio de unaestructura tipo escalera de Al o de Cu, se moverá, por la ley de Lenz, hacia la derecha a lavelocidad U, dada la interacción del campo primario y del campo secundario creado por lacorriente inducida cuya dirección se ha determinado mediante la regla de la mano derecha.
FIG NO. 18.
El primario de un MIL trifásico es devanado en forma similar a un motor jaula de ardilla,excepto que el devanado viene distribuido en línea, tal y como se muestra en la Fig. No. 19,en donde se ha usado una bobina por polo y por fase para un MIL de dos polos. Elsecundario es una lámina conductora de Al o de Cu, sobre la que las corrientes de eddyinducidas desarrollan una fuerza en dirección opuesta al movimiento relativo.
FIG.NO.19.
23
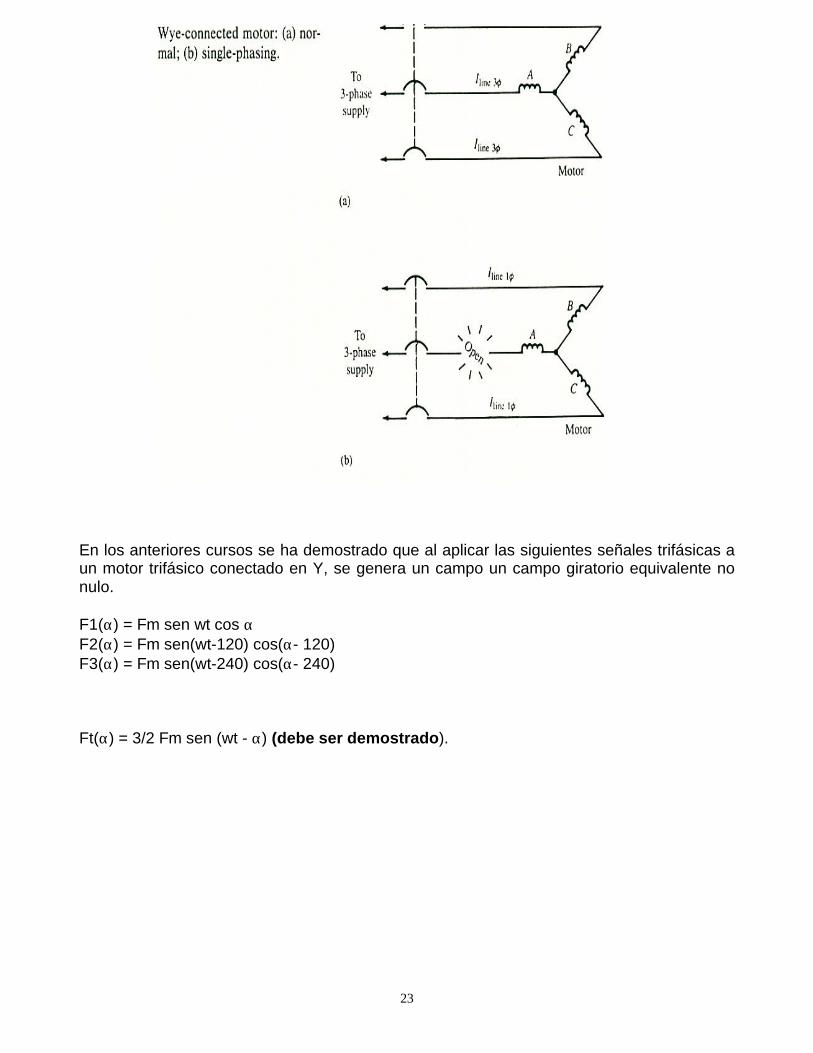
En los anteriores cursos se ha demostrado que al aplicar las siguientes señales trifásicas aun motor trifásico conectado en Y, se genera un campo un campo giratorio equivalente nonulo.
F1(α) = Fm sen wt cos αF2(α) = Fm sen(wt-120) cos(α- 120)F3(α) = Fm sen(wt-240) cos(α- 240)
Ft(α) = 3/2 Fm sen (wt - α) (debe ser demostrado).
24
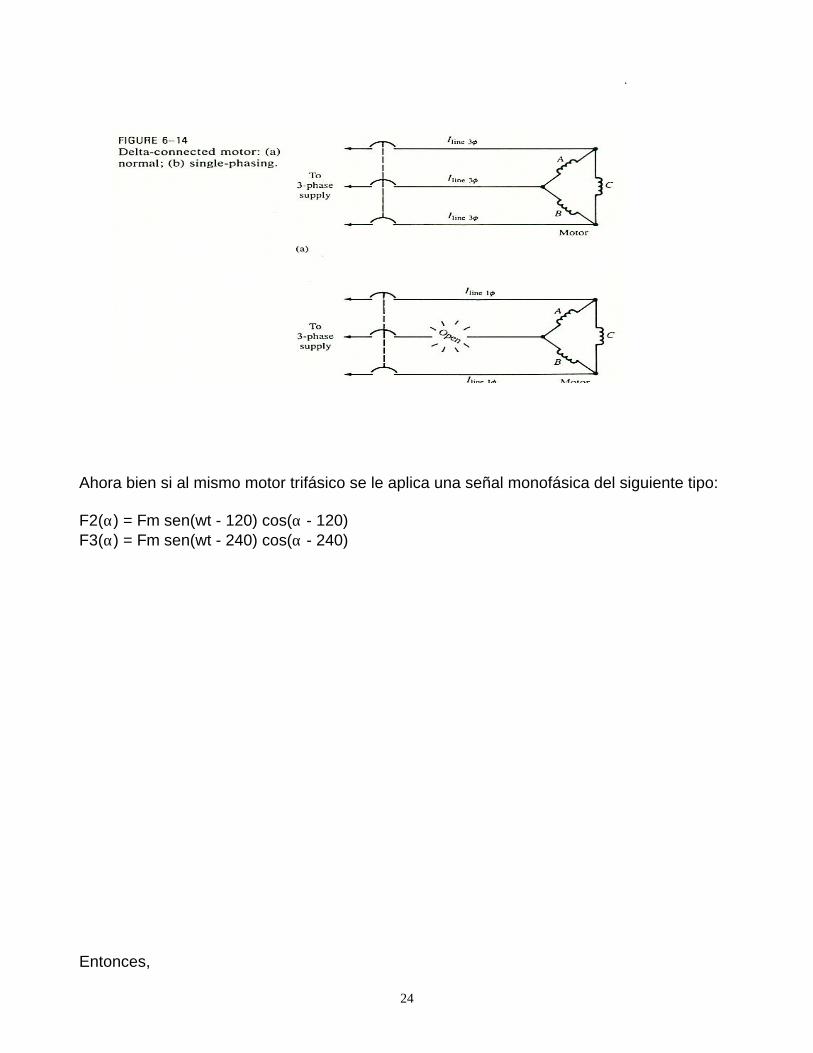
Ahora bien si al mismo motor trifásico se le aplica una señal monofásica del siguiente tipo:
F2(α) = Fm sen(wt - 120) cos(α - 120)F3(α) = Fm sen(wt - 240) cos(α - 240)
Entonces,
25
F2(α) + F3(α) = 3/2 Fm (cos (wt - α ) – cos (wt + α )), es una fmm estacionaria que generaráun campo pulsante que impidirá que la máquina trifásica conectada en Ypueda salir del estado inercial que representa el reposo.