Embed Size (px)
DESCRIPTION
Sebagai tugas mata kuliah Pemodelan dan Pengendalian Mesin Listrik
Citation preview

TUGAS 5
PEMODELAN DAN PENGENDALIAN MESIN
LISTRIK
SISTEM PENGENDALIAN TERTUTUP
Dosen : Dr. Ir. H. Rhiza S. Sadjad, MS.EE.
DISUSUN OLEH :
BAGUS HARDA SETIABUDI
NIM : P2700214030
PROGRAM PASCASARJANA TEKNIK KOMPUTER
KENDALI DAN ELEKTRONIKA
FAKULTAS TEKNIK ELEKTRO
UNIVERSITAS HASANUDDIN
2014

Bagus Harda Setiabudi P2700214030
BAB I
PENDAHULUAN
Tujuan dari pengontrol kecepatan motor adalah agar dapat menjalankan motor sesuai
dengan kecepatan yang diinginkan, meskipun ada perubahan beban. Pada umumnya
penerapan motor listrik bekerja pada tiga aspek operasi yaitu pada saat starting, pengendalian
kecepatan dan pengereman. Dalam sistem pengendalian dikenal dua sistem yaitu
pengendalian sistem loop terbuka (Open Loop controller) dan pengendalian sistem loop
tertutup ( Closed Loop Controller). Pada laporan ini akan disimulasikan pengaturan
kecepatan motor dc dengan sistem pengedalian loop tertutup, ( dengan umpan balik) yaitu
mengatur kecepatan motor dengan menggunakan kendali PID.
Pada tugas 5 kali ini sistem kendali loop tertutup tersebut akan di terapkan sebuah
pengendali kecepatan putar yang diinginkan. Kemudian pada sistem tersebut juga akan
diberikan gangguan perubahan beban untuk melihat seberapa handal pengendali bekerja
mengatasi gangguan dan mempertahankan kecepatan putar yang diinginkan.
Data Motor DC
Tipe Motor : Penta 1 M (Motor Power Company)
Data Nilai Satuan
Daya (P) 0.09383 HP
70 Watt
Tegangan Jangkar (Ea) 48 Volt
Arus Jangkar (Ia) 1.95 Ampere
Putaran nominal (ωnom) 3000 RPM
314.16 rad/sec
Momen Inersia (J) 0.000769 lb.ft
2
0.0000324 N.m.sec2/rad
Tahanan jangkar (Ra) 2.3300 Ohm
Induktansi Jangkar (La) 0.004 Hendry
Efisiensi (η) 74.79 %
Konstanta motor (Km) 0.1143 N.m/A
Konstantan GGL lawan (Kb) 0.1383 V.sec/rad
Koefisien gesekan /beban (B) 0.0007 Kg.m2/rad.sec (N.m.sec/rad)

Bagus Harda Setiabudi P2700214030
BAB II
TINJAUAN PUSTAKA
2.1. Sistem Kendali Loop Tertutup
Sistem kendali dapat dikategorikan dalam beberapa kategori yaitu sistem kendali secara
manual dan otomatis, sistem kendali jaringan terbuka (open loop) dan sistem kendali jaringan
tertutup (close loop).
Sistem kontrol umpan balik merupakan sebuah sistem yang mempertahankan hubungan
yang ditentukan antara keluaran dan beberapa masukan acuan, dengan membandingkannya
dan dengan menggunakan perbedaan sebagai alat kontrol dinamakan sistem kontrol umpan
balik. Sistem kontrol umpan balik seringkali disebut sebagai sistem kontrol loop tertutup.
Praktisnya, istilah kontrol umpan balik dan kontrol loop tertutup dapat saling dipertukarkan
penggunaanya. Pada sistem loop tertutup, sinyal kesalahan yang bekerja yaitu perbedaan
antara sinyal masukan dan sinyal umpan balik disajikan ke kontroler sedemikian rupa untuk
mengurangi kesalahan dan membawa keluaran sistem ke nilai yang dikehendaki. Istilah
kontrol loop tertutup selalu berarti penggunaan aksi kontrol umpan balik untuk mengurangi
kesalahan sistem. Atau dengan kata lain, Sistem Kendali Loop Tertutup adalah sistem
pengendalian dimana besaran keluaran memberikan efek terhadap besaran masukan sehingga
besaran yang dikontrol dapat dibandingkan terhadap harga yang diinginkan melalui alat
pencatat (indikator/sensor). Selanjutnya perbedaan harga yang terjadi antara besaran yang
dikontrol dan penunjukan alat pencatat digunakan sebagai koreksi yang pada gilirannya akan
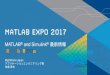
merupakan sasaran pengaturan. Blok diagram loop tertutup yang umum seperti pada gambar
berikut ini.
Gambar 2.1. Diagram blok sistem kendali loop tertutup
Secara umum, bagian – bagian yang terdapat pada sistem kontrol rangkaian tertutup
adalah sebagai berikut :

Bagus Harda Setiabudi P2700214030
1. Masukan (reference input elemen)
Bagian ini berfungsi untuk mengubah besaran yang dikontrol menjadi sinyal masukan
acuan bagi sistem kontrol.
2. Pengontrol (Controller)
Berfungsi untuk memproses kesalahan (error) yang terjadi dan setelah kesalahan
tersebut dilewatkan (dimasukkan) melalui elemen pengontrol, akan dihasilkan sinyal
yang berfungsi sebagai pengontrol proses.
3. Sistem (proses)
Bagian ini dapat berupa proses mekanis, elektris, hidraulis maupun kombinasinya.
4. Jalur umpan balik (feedback)
Yaitu merupakan bagian sistem yang mengukur keluaran yang dikontrol dan
kemudian mengubahnya menjadi sinyal umpan balik (feedback signal).
Berdasarkan jumlah bagian yang menyusun suatu sistem kontrol, terdapat beberapa variabel
pengontrolan. Diantaranya adalah :
1. Set Point
Set point adalah harga yang diinginkan bagi variabel yang di kontrol selama
pengontrolan. Harga ini tidak tergantung dari keluaran sistem.
2. Masukan acuan (reference input)
Merupakan sinyal aktual yang masuk ke dalam sistem kontrol. Sinyal ini diperoleh
dengan menyetel harga v melalui Gv, sehingga dapat dipakai dalam sistem kontrol
3. Keluaran yang dikontrol (Controlled Output)
Yaitu merupakan harga/nilai yang akan dipertahankan bagi variabel yang dikontrol
dan merupakan harga yang ditunjukkan oleh alat pencatat.
4. Variable yang dimanipulasi (Manipulated Variable)
Adalah sinyal yang keluar dari elemen pengontrol (controller) dan berfungsi sebagai
sinyal pengontrol tanpa adanya sinyal gangguan.
5. Sinyal umpan balik (Feedback Signal)
Yaitu sinyal yang merupakan fungsi dari keluaran yang dicata oleh alat pencatat.
6. Kesalahan (Error)
Adalah selisih antara masukan acuan dan sinyal umpan balik. Sinyal ini adalah sinyal
yang dimasukkan ke elemen pengontrol (Controller) dan harganya diinginkan sekecil
mungkin. Sinyal error ini menggerakkan unit pengontrol untuk menghasilkan atau
mendapatkan keluaran pada suatu harga yang diinginkan.

Bagus Harda Setiabudi P2700214030
7. Sinyal gangguan (Disturbance Signal)
Merupakan sinyal – sinyal tambahan yang tidak diinginkan. Gangguan ini cenderung
mengakibatkan harga controlled output berbeda dengan harga yang disetting melalui
masukkan acuan. Gangguan ini disebabkan oleh perubahan beban sistem.
2.2. Proportional Integral Derivative (PID)
Didalam suatu sistem kontrol kita mengenal adanya beberapa macam aksi kontrol,
diantaranya yaitu aksi kontrol proporsional, aksi kontrol integral dan aksi kontrol derivatif.
Masing-masing aksi kontrol ini mempunyai keunggulan – keunggulan tertentu, dimana aksi
kontrol proporsional mempunyai keunggulan rise time yang cepat, aksi kontrol integral
mempunyai keunggulan untuk memperkecil error dan aksi kontrol derivatif mempunyai
keunggulan untuk memperkecil error atau meredam overshot/undershot. Untuk itu agar kita
dapat menghasilkan output dengan risetime yang cepat dan error yang kecil kita dapat
menggabungkan ketiga aksi kontrol ini menjadi aksi kontrol PID.
Parameter pengontrol Proporsional Integral derivatif (PID) selalu didasari atas tinjauan
terhadap karakteristik yang di atur (plant). Dengan demikian bagaimanapun rumitnya suatu
plant, perilaku plant tersebut harus di ketahui terlabih dahulu sebelum pencarian parameter
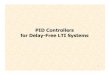
PID itu dilakukan. Dalam pengendali PID ini, agar perlu diketahui bahwa bentuk respon
keluaran yang akan menjadi target perubahan yaitu seperti dijelaskan pada gambar 2.9 di
bawah ini.
Gambar 2.2. Jenis Respon Keluaran
A. Pengontrol Proporsional
Pengontrol proposional memiliki keluaran yang sebanding atau proposional
dengan besarnya sinyal kesalahan (selisih antara besaran yang di inginkan dengan
harga aktualnya). Secara lebih sederhana dapat dikatakan bahwa keluaran pengontrol

Bagus Harda Setiabudi P2700214030
proporsional merupakan perkalian antara konstanta proposional dengan masukannya.
Perubahan pada sinyal masukan akan segera menyebabkan sistem secara langsung
mengeluarkan output sinyal sebesar konstanta pengalinya.
Ciri-ciri pengontrol proposional harus diperhatikan ketika pengontrol tersebut
diterapkan pada suatu sistem. Secara eksperimen, pengguna pengontrol propoisional
harus memperhatikan ketentuan-ketentuan berikut ini :
a. Kalau nilai Kp kecil, pengontrol proposional hanya mampu melakukan koreksi
kesalahan yang kecil, sehingga akan menghasilkan respon sisitem yang lambat.
b. Kalau nilai Kp dinaikkan, respon sistem menunjukkan semakin cepat mencapai
set point dan keadaan stabil.
c. Namun jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan akan
mengakibatkan sistem bekerja tidak stabil atau respon sistem akan berosilasi.
B. Pengontrol Integral
Pengontrol integral berfungsi menghasilkan respon sistem yang memiliki
kesalahan keadaan stabil nol. Jika sebuah plant tidak memiliki unsur integrator (1/s)
pengontrol proposional tidak akan mampu menjamin keluaran sistem dengan
kesalahan keadaan stabilnya nol. Dengan pengontrol integral, respon sistem dapat
diperbaiki, yaitu mempunyai kesalahan keadaan stabilnya nol.
Pengontrol integral memiliki karaktiristik seperti halnya sebuah integral.
Keluaran sangat dipengaruhi oleh perubahan yang sebanding dengan nilai sinyal
kesalahan. Keluaran pengontrol ini merupakan penjumlahan yang terus menerus dari
perubahan masukannya. Kalau sinyal kesalahan tidak mengalami perubahan, keluaran
akan menjaga keadaan seperti sebelum terjadinya perubahan masukan.
Ketika digunakan, pengontrol integral mempunyai beberapa karakteristik
berikut ini:
a. Keluaran pengontrol membutuhkan selang waktu tertentu, sehingga pengontrol
integral cenderung memperlambat respon.
b. Ketika sinyal kesalahan berharga nol, keluaran pengontrol akan bertahan pada
nilai sebelumnya.
c. Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan
atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki.

Bagus Harda Setiabudi P2700214030
d. Konstanta integral (Ki) yang berharga besar akan mempercepat hilangnya offset.
Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi
dari sinyal keluaran pengontrol.
C. Pengontrol Derivative
Keluaran pengontrol Derivatif memiliki sifat seperti halnya suatu operasi
differensial. Perubahan yang mendadak pada masukan pengontrol, akan
mengakibatkan perubahan yang sangat besar dan cepat.
Ketika masukannya tidak mengalami perubahan, keluaran pengontrol juga
tidak mengalami perubahan, sedangkan apabila sinyal masukan berubah mendadak
dan menaik (berbentuk fungsi step), keluaran menghasilkan sinyal berbentuk impuls.
Jika sinyal masukan berubah naik secara perlahan (fungsi ramp), keluarannya justru
merupakan fungsi step yang besar magnitudenya sangat dipengaruhi oleh kecepatan
naik dari fungsi ramp dan faktor konstanta diferensialnya.
Karakteristik pengontrol derivatif adalah sebagai berikut :
a. Pengontrol ini tidak dapat menghasilkan keluaran bila tidak ada perubahan pada
masukannya (berupa sinyal kesalahan)
b. Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan
pengontrol tergantung pada nilai Td dan laju perubahan sinyal kesalahan.
c. Pengontrol derivatif mempunyai suatu karakter untuk mendahului, sehingga
pengontrol ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit
kesalahan menjadi sangat besar. Jadi pengontrol derivatif dapat mengantisipasi
pembangkit kesalahan, memberikan aksi yang bersifat korektif dan cenderung
meningkatkan stabilitas sistem.
Berdasarkan karakteristik pengontrol tersebut, pengontrol derivatif umumnya
dipakai untuk mempercepat respon awal suatu sistem, tetapi tidak memperkecil
kesalahan pada keadaan stabilnya. Kerja pengontrol derivatif hanyalah efektif pada
lingkup yang sempit, yaitu pada periode peralihan. Oleh sebab itu pengontrol derivatif
tidak pernah digunakan tanpa ada pengontrol lain sebuah sistem.
Efek dari setiap pengontrol Proporsional, Integral dan Derivatif pada sistem
loop tertutup disimpulkan pada tabel berikut ini :

Bagus Harda Setiabudi P2700214030
Tabel 1. Respon PID Controller terhadap perubahan konstanta
Setiap kekurangan dan kelebihan dari masing-masing pengontrol P, I dan D
dapat saling menutupi dengan menggabungkan ketiganya secara paralel menjadi
pengontrol proporsional plus integral plus diferensial (pengontrol PID). Elemen-
elemen pengontrol P, I dan D masing-masing secara keseluruhan bertujuan :
a. Mempercepat reaksi sebuah sistem untuk mencapai set – point nya.
b. Menghilangkan offset
c. Menghasilkan perubahan awal yang besar dan mengurangi overshoot.

Bagus Harda Setiabudi P2700214030
BAB III
PEMBAHASAN
3.1. Perancangan Simulasi
Dalam perancangan simulasi hal pertama yang dilakukan adalah membuat pemodelan
Motor DC dengan simulink tanpa pengendali pada saat kondisi gangguan perubahan beban.
Gambar 3.1. Model Simulink sistem kendali loop tertutup
Dari gambar di atas terdapat beberapa komponen penting :
- Warna abu – abu merupakan motor DC dimana pada bagian tersebut terbagi atas 2
sub bagan lagi yaitu bagan elektrik dan bagan mekanik yang memiliki peran sendiri-
sendiri.
- Warna hijau merupakan output keluaran yang akan di tampilkan pada plot grafik.
- Warna pink merupakan gangguan beban yang di setting dengan menggunakan
komponen step.
- Warna biru adalah bagian pengendali dimana didalamnya terdapat pengendali P,
pengendali I dan pengendali D.

Bagus Harda Setiabudi P2700214030
- Warna kuning merupakan alpha yang didapat dengan menggunakan rumus yang
terdapat pada Chart 8.1 Circuit Constants of some Major Phase Controler Circuits.
Pada percobaan ini rumus yang dipakai untuk mencari alpha adalah 𝐸
𝜋 (1 + cos𝛼)
dengan perhitungan sebagai berikut :
48 = 220.√2
22/7 (1 + cos𝛼)
48 = 220 √2 x 7
22 (1 + cos𝛼)
48 = 10 √2 x 7(1 + cosα)
48 = 70 √2 (1 + cos𝛼)
cos𝛼 = 48 − 70 √2
cos𝛼 =48−98.9949
98.9949
cos = -0.5146
= 121.006
Sensor kecepatan yang digunakan berupa Tachometer DC. Pada dasarnya Tachometer
DC ini tidak lain merupakan sebuah Generator DC kecil yang menghasilkan tegangan DC
dimana perbandingan antara tegangan yang dihasilkan dengan putarannya tergantung pada
model dan spesifikasi dari Tachometer DC tersebut. Model pada gambar 3.1 tidak jauh beda
dengan model-model simulink pada tugas 2-4 yang lalu yang berbeda hanya pada tugas ini
terdapat model pengendali dimana pengendali yang digunakan adalah pengendali PID.
Gambar 3.2. Model Simulink timing gangguan beban

Bagus Harda Setiabudi P2700214030
Pada model ini gangguan akan di atur kapan waktu gangguan dan kondisinya pada
gambar di atas gangguan akan di turunkan pada detik 0.06 dan akan di naikkan pada detik
0.12. Selanjutnya pada detik 0.25 gangguan akan di naikkan lagi 2 kali lipat dan akan di
turunkan pada detik 0.31. Keluaran pada subsistem ini akan di kalikan dengan gangguan
nominal pada beban sesuai gambar 3.2 di atas.
Gambar 3.3. Model Simulink rangkaian pengendali
Pada model simulink ini terdapat 2 input yakni umpan balik dari kecepatan keluaran
dari motor serta settingan rata-rata RPM yang di inginkan. Dalam hal ini RPM harus di
konversi terlebih dahulu ke level tegangan yang akan digunakan sebagai input dari PID
controller. Referensi tachometer yang digunakan pada percobaan ini adalah 3000/9000
dimana 9000 adalah batas maksimum pembacaan sendor tachometer.
Gambar 3.4. Model Simulink pengendali PID
Kontrol PID yang digunakan akan di variasikan tergantung kebutuhan dan mencari
nilai yang paling baik dari model PID. Pada kontrol PID terdapat 4 kontrol secara umum
yakni kontrol P, Kontrol PI, Kontrol PD, dan kontrol PID. Pengendali PID ini bekerja
berdasarkan error yang diperoleh dari selisih nilai kecepatan yang diinginkan (setpoint/SP)
dan nilai kecepatan yang diukur oleh sensor (present value/PV). Selanjutnya pengendali akan

Bagus Harda Setiabudi P2700214030
menghasilkan sinyal keluaran sebagai berikut: jika error > 0 (putaran turun) maka sudut
penyalaan (⍺) diperkecil / tegangan jangkar dinaikkan sedangkan jika error < 0 (putaran naik)
maka sudut penyalaan (⍺) diperbesar / tegangan jangkar diturunkan.
3.2. Hasil Simulasi
A. Close Loop tanpa pengendali dengan beban tetap
Gambar 3.5. Model Simulink tanpa pengendali dengan beban tetap
Pada simulasi ini, Terlihat pada gambar di atas terdapat overshoot pada kecepatan
putaran ketika mulai dijalankan. Kecepatan motor mencapai 3005.6 Rpm kemudian mulai
transien pada kecepatan 3005.4 Rpm.
B. Close Loop tanpa pengendali dengan beban berubah – ubah
Gambar 3.6. Model Simulink tanpa pengendali dengan beban berubah – ubah
Terlihat dari gambar 3.6 ketika beban berubah-ubah sesuai waktu penyalaan beban
terdapat banyak perubahan yang terjadi sehingga di peroleh kecepatan putar minimum dan
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.41.92
1.93
1.94Arus Jangkar
Time[Sec]
Aru
s[A
mpere
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.43004
3005
3006Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-2
0
2Beban
Time[Sec]Gangguan B
eban
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-5
0
5Arus Jangkar
Time[Sec]
Aru
s[A
mpere
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.42500
3000
3500Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban

Bagus Harda Setiabudi P2700214030
kecepatan putar maksimum. Pada saat beban di turunkan arus jangkar akan turun juga tetapi
kecepatan putar meningkat dan ketika beban di naikkan arus jangkar akan naik dan kecepatan
putar akan turun.
C. Close Loop dengan pengendali PID
- Kontrol P
Gambar 3.7. Hasil simulasi dengan kontrol P = 60
Gambar 3.8. Hasil simulasi dengan kontrol P = 680
Terlihat dari gambar 3.7 dan 3.8 di atas semakin besar nilai P mempengaruhi waktu
naik dan error pada steady state. Sehingga semakin mendekati kecepatan awal motor
tersebut walaupun terdapat beban yang berubah – ubah. Namun konsekuensinya overshoot
menjadi tinggi.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45-10
0
10Arus Jangkar
Time[Sec]
Arus[A
mpere]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.452800
3000
3200Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45-10
0
10Arus Jangkar
Time[Sec]
Aru
s[A
mpere
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.452900
3000
3100Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban

Bagus Harda Setiabudi P2700214030
- Kontrol PI
Gambar 3.9. Hasil simulasi dengan kontrol P = 680, I = 10
Gambar 3.10. Hasil simulasi dengan kontrol P = 680, I = 20
Dari perbandingan simulasi pada gambar 3.9 dan 3.10 di atas terlihat bahwa semakin
besar nilai Ki akan mengurangi error steady state pada grafik tersebut.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45-10
0
10Arus Jangkar
Time[Sec]
Aru
s[A
mpere
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.452900
3000
3100Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-10
0
10Arus Jangkar
Time[Sec]
Aru
s[A
mpere
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.42900
3000
3100Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban

Bagus Harda Setiabudi P2700214030
- Kontrol PD
Gambar 3.11. Hasil simulasi dengan kontrol P = 680, D = 0.1
Gambar 3.12. Hasil simulasi dengan kontrol P = 680, D = 0.5
Terlihat pada gambar 3.11 dan 3.12 diatas, kita dapat membandingkan bahwa semakin
besar nilai PD maka semakin kecil nilai overshootnya.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-10
0
10Arus Jangkar
Time[Sec]
Arus[A
mpere]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.42950
3000
3050Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-10
0
10Arus Jangkar
Time[Sec]
Arus[A
mpere]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.42950
3000
3050Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban

Bagus Harda Setiabudi P2700214030
- Kontrol PID
Gambar 3.13. Hasil simulasi dengan kontrol P = 680, I = 21, D = 0.5
Dari gambar 3.13 diatas setidaknya terlihat lebih baik jika dibandingkan dengan
gambar 3.6. Kondisi yang terlihat perbedaannya adalah waktu naik lebih cepat, kecepetan
motor lebih mendekati ke kecepatan nominal dibandingkan pada saat sebelum memakai
kendali kondisi waktu naik lebih lama dan kecepetan motor agak jauh dari kecepatan nominal
ketika diuji dengan beban yang berubah – ubah.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-10
0
10Arus Jangkar
Time[Sec]
Arus[A
mpere]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.42950
3000
3050Kecepatan Sudut
Time[Sec]
Om
ega[R
PM
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
2
4x 10
-3 Beban
Time[Sec]Gangguan B
eban

Bagus Harda Setiabudi P2700214030
BAB IV
PENUTUP
Kesimpulan
1. Gangguan perubahan beban dapat menyebabkan perubahan kecepatan putaran motor
yang besarnya berbanding terbalik.
2. Dengan menambahkan sistem kendali loop tertutup pada Motor DC maka gangguan
perubahan beban tidak akan menyebabkan perubahan kecepatan yang signifikan. Hal ini
di sebabkan karena pengendali akan berusaha mempertahankan nilai kecepatan dengan
mengatur sudut penyalaan () berdasarkan besarnya nilai error yang terjadi.
3. Pada pengendali PID penentuan nilai KP, Ki dan Kd harus tepat agar dihasilkan unjuk
kerja pengendalian yang memuaskan
DAFTAR PUSTAKA
http://www.unhas.ac.id/rhiza/arsip//kuliah/PPML/dokumentasi-2014/
http://elektro.unm.ac.id/jurnal/ME/ME%20Vol%203%20No.1%20edisi%20Juni%202008/Ha
rifuddin.pdf
http://staff.uny.ac.id/sites/default/files/Dasar%20Sistem%20Kendali%20BAB%201.pdf










![C6-PID Controller Tuning[1]](https://img.pdfslide.tips/doc/110x75/55cf9497550346f57ba30ba9/c6-pid-controller-tuning1.jpg)















