Embed Size (px)
Citation preview

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
© Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
UM6200 システム
UNIT - CONTROLLER間通信 I/F 仕様書
<UM6200>
Rev. 1.02
株式会社日立情報通信エンジニアリング

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
© Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
変更歴
日付 Rev. 変更内容 名前 備考
10/11/19 Rev.0.5 初版(UM3000 より改版) 金子
10/11/29 Rev.0.9 11/24 DR内容反映 金子
10/12/01 Rev.1.0 3.5.3 PID メモリ部動作指定 および
3.5.6 PID メモリ部連続動作指定 の
PID メモリ更新順序変更
金子
10/12/03 Rev.1.01 付録)処理結果要因コード表に「バックアップデー
タ書き込み中である」の要因コードを追加
金子
13/07/12 Rev.1.02 社名変更 諸富

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
© Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
目次
1. 適用 .............................................................................................................................................................................. 1
1.1. 適用 ................................................................................................................................................................ 1
2. インタフェース仕様概要 ............................................................................................................................................ 1
2.1. 概要 ................................................................................................................................................................ 1
2.2. ソケットインタフェース仕様 .......................................................................................................................... 1
2.2.1. 接続方式 .................................................................................................................................................. 1
2.2.2. ポート規約 ................................................................................................................................................ 2
3. コマンド・レスポンス仕様 .......................................................................................................................................... 3
3.1. データグラム・フォーマット ............................................................................................................................ 3
3.1.1. コマンド・フォーマット ................................................................................................................................ 3
3.1.2. レスポンス・フォーマット ............................................................................................................................ 4
3.2. コマンド送受信方式 ................................................................................................................................... 5
3.3. コマンド/レスポンスの分割 ...................................................................................................................... 5
3.4. コマンド一覧 .................................................................................................................................................. 6
3.4.1. コマンド体系 ............................................................................................................................................. 6
3.4.2. コマンド一覧 ............................................................................................................................................. 7
3.5. コマンドメッセージ仕様 ............................................................................................................................... 8
3.5.1. TS IN部動作指定 ................................................................................................................................ 8
3.5.2. PID メモリ部動作指定 ........................................................................................................................... 9
3.5.3. PID メモリ部更新指定 ......................................................................................................................... 10
3.5.4. MUX部動作指定 ................................................................................................................................ 11
3.5.5. TS IN部動作連続指定..................................................................................................................... 12
3.5.6. PID メモリ部連続更新指定 ............................................................................................................... 13
3.5.7. Unit動作指定状態・ステータス一括問合せ ................................................................................ 14
3.5.8. PID メモリ部セクションデータ問合せ.................................................................................................. 15
3.5.9. バージョン確認コマンド ......................................................................................................................... 16
4. コマンド/レスポンスシーケンス ............................................................................................................................... 17
4.1. 正常シーケンス ........................................................................................................................................... 17
4.2. 異常シーケンス ........................................................................................................................................... 18
(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
1 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
1. 適用
1.1. 適用
本仕様書は、UM6200 システム用制御装置(以降、UM6KSCONT と略す。)-UM6200 ユニット(以降、
UNIT と略す。)間のインタフェース仕様に適用する。
2. インタフェース仕様概要
2.1. 概要
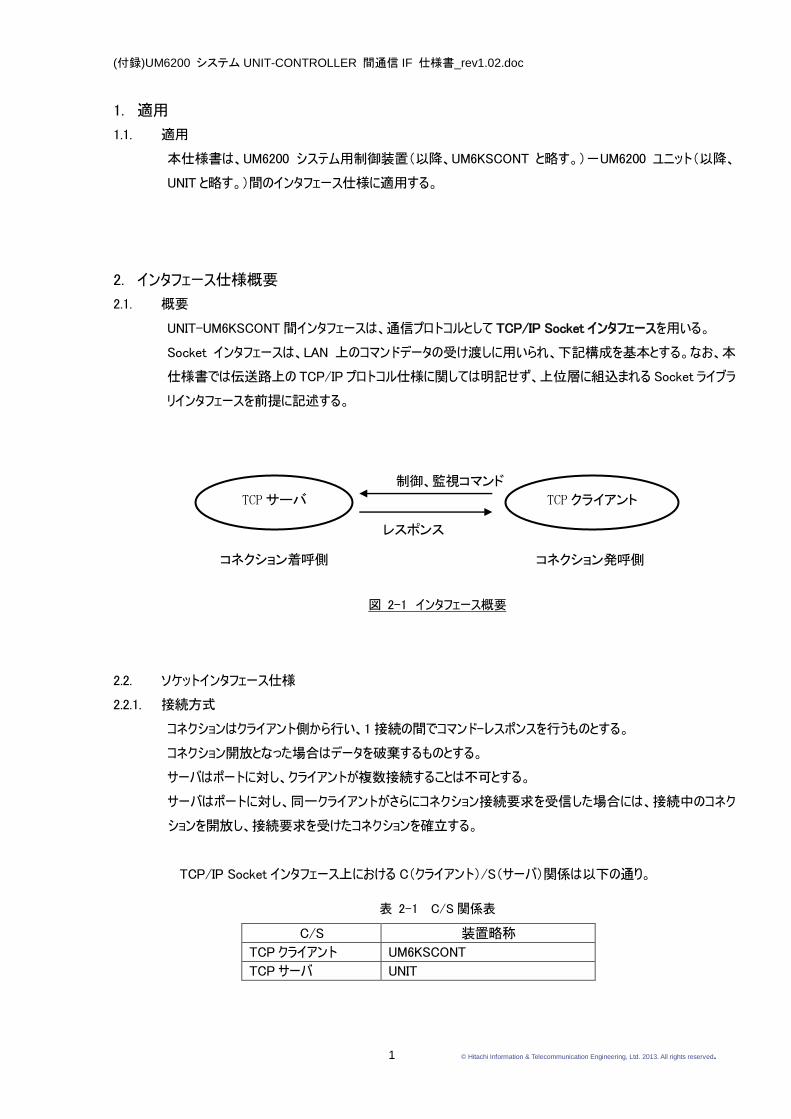
UNIT-UM6KSCONT間インタフェースは、通信プロトコルとして TCP/IP Socket インタフェースを用いる。
Socket インタフェースは、LAN 上のコマンドデータの受け渡しに用いられ、下記構成を基本とする。なお、本
仕様書では伝送路上の TCP/IPプロトコル仕様に関しては明記せず、上位層に組込まれる Socketライブラ
リインタフェースを前提に記述する。
図 2-1 インタフェース概要
2.2. ソケットインタフェース仕様
2.2.1. 接続方式
コネクションはクライアント側から行い、1接続の間でコマンド-レスポンスを行うものとする。
コネクション開放となった場合はデータを破棄するものとする。
サーバはポートに対し、クライアントが複数接続することは不可とする。
サーバはポートに対し、同一クライアントがさらにコネクション接続要求を受信した場合には、接続中のコネク
ションを開放し、接続要求を受けたコネクションを確立する。
TCP/IP Socket インタフェース上における C(クライアント)/S(サーバ)関係は以下の通り。
表 2-1 C/S関係表
C/S 装置略称
TCP クライアント UM6KSCONT
TCPサーバ UNIT
TCPサーバ
TCPクライアント
制御、監視コマンド
コネクション着呼側 コネクション発呼側
レスポンス

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
2 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
2.2.2. ポート規約
UNITは、TCP/IPソケットのサービスポートを2ポート装備する。また、各ポートでサポートするコマンドについて
は、コマンド一覧に対応づけられた範囲を網羅すること。
ポート A とポート Bの特性について下表に示す。
表 2-2 UNITサービスポート
ポート番号 最大同時接続数 接続形態
ポート A 10000固定 1 制御系コマンド接続
ポート B 10005固定 1 監視系コマンド接続
※デバッグ系コマンド接続含む
注)ポート未対応コマンドの投入(例 図 2-2)は不可とする。
その他、コマンドに対応するサービスポートの関係は、表 3-3に規定する内容に従うものとする。
ポート規約に反する(未対応)コマンドは異常応答とする。
ポート毎にコマンド/レスポンスは可能とする。
図 2-2 ポート規約(禁止パターン例)
ポートA 制御系
コマンド
ポートB
ポートA
監視系
コマンド ポートB

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
3 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3. コマンド・レスポンス仕様
3.1. データグラム・フォーマット
ソケットインタフェース・データグラムは、ネットワーク・バイト・オーダー(ビッグエンディアン)とする。
3.1.1. コマンド・フォーマット
(A) コマンド・フォーマット
図 3-1 コマンド・フォーマット
(B) バージョン情報
バージョン情報は下記フォーマットで構成され、コマンド発行元が付与する。
送信先装置番号、コマンド送信元装置内での管理番号とも ASCII コード
図 3-2 バージョン情報の構成
表 3-1 バージョン情報における各フィールドの意味
各フィールドの意味
送信先装置番号 コマンド送信先の装置識別番号(00固定)
コマンド送信元装置内での管
理番号
コマンド送信元で管理するコマンドの番号(10進数)
使用/未使用は任意とする。
-2byte- -2byte-
-1byte- -4byte- -8byte- -可変長-
(7E)h バージョン情報 コマンドデータ長 コマンドデータ.
Length(byte)
送信先装置番号 コマンド送信元装置内での管理番号
ASCIIコード ASCIIコード

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
4 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
(C) コマンドデータ長
コマンドデータ長はコマンドデータの長さを8byte(byte単位)(ASCII コードで4桁:10進数)指定する。
(D) コマンドデータ
コマンド名毎に規定されたデータフォーマットを指定する。
(3.4 コマンド一覧参照のこと。)
3.1.2. レスポンス・フォーマット
(A) レスポンス・フォーマット
図 3-3 レスポンス・フォーマット
(B) バージョン情報
受信処理したバージョン情報(ASCII コード)をそのまま代入する。
(C) レスポンスデータ長
レスポンスデータ長はレスポンスデータの長さを8byte(byte 単位) (ASCII コードで4桁:10 進数)で指定す
る。
(D) レスポンスデータ
コマンド名毎に規定されたデータフォーマットを指定する。
-1byte- -4byte- -8byte- -可変長-
(7E)h バージョン情報 レスポンスデータ長 レスポンスデータ.
Length(byte) ASCII コード ASCII コード

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
5 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.2. コマンド送受信方式
基本的に半二重通信とし、コマンドに対するレスポンスを受信するまで次のコマンドを送信しない。
但し、規定のタイムアウト時間が経過してもレスポンスがない場合には、次のコマンドを送信しても良い。
UNIT 側はレスポンスを返信する前、あるいはタイムアウト時間に到達する前に、次のコマンドを受信した場合
は破棄する。
3.3. コマンド/レスポンスの分割
コマンド/レスポンスは、ネットワーク上の伝送において、TCP/IP 層を構成する各層のプロトコルにおける伝
送フォーマットに従い、パケット分割して送受信されることがある。
コマンド/レスポンスの受信アプリケーションは、1 コマンド/レスポンスを構成する全てのパケットを受信した段
階で、そのコマンド/レスポンスを受信したものとして処理するものとする。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
6 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.4. コマンド一覧
3.4.1. コマンド体系
UM6200ユニットがサポートするコマンドの種別を表 3-2のとおり定義し体系化する。
表 3-2 コマンド体系
コマンド名 コマンド種別 備考
S*
R*
制御系コマンド ユニット制御(設定)時に投入する。
PID設定内容の確認時に投入する。
R* 監視系コマンド アラーム・ステータス監視、及び設定内容の確認時に投入
する。
D* デバッグコマンド ユニット保守(デバッグモニタ)時に投入する

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
7 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.4.2. コマンド一覧
UM6200ユニットがサポートするコマンド及び対応するサービスポートの関係を表 3-3に示す。
表 3-3 コマンド一覧
コマンド名
ブロック
コード
コマンド
コード
(ASCII)
機能 タイムアウト
基準値
対応ポート
A B
制御系 TS S TS IN部 動作指定機能 2000ms ○
S PD S PID メモリ部 動作指定機能 2000ms ○
PS S PID メモリ部 更新制御機能 2000ms ○
MU S MUX部 動作指定機能 2000ms ○
TS R TS IN部 動作連続指定機能 2000ms ○
PS R PID メモリ部 更新連続制御機能 2000ms ○
R PD F PID メモリ部
PID メモリデータ問合せ機能
2000ms ○
監視系
R
UN A Unit 動作指定状態・ステータス
一括問合せ機能
2000ms ○
デバッグ
D
UN V デバッグ用
バージョン問い合わせコマンド
2000ms ○
※RUNAのポーリング周期は 3 s 以上を推奨とする。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
8 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5. コマンドメッセージ仕様
3.5.1. TS IN部動作指定
(1)機能
UNIT内 TS IN部に対して動作設定(ON/OFF)を行う。
(2)コマンドデータ
表 3-4 TS IN部動作指定コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “STSS”: TSIN部動作指定コマンド
TSIN set 1byte
“N”:TSIN部を動作指定しない
“Y”:TSIN部を動作指定する
“N”の場合は以降のパラメータは
全て無効
但し、フィールド内の設定は必
要。
TSIN Port code 2byte
“XX”:ポート番号を指定
(例) TSIN01のとき”01”
TSIN02のとき”02”
TSIN06のとき”06”
TS 部のポート番号も 01~06 ま
での範囲とする。
TSIN Flame length 3byte “188”:188byte指定
“204”:204byte指定
TSIN Tx 1byte “N”:TSIN部をOFF指定
“Y”:TSIN部を ON指定
※Unit(UM6200)は TSIN Txを ON指定時は、多重入力バッファ(FIFO)のリセットを行う。
(3)レスポンスデータ
表 3-5 TS IN部動作指定コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “STSS”: TSIN部動作指定応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
9 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.2. PID メモリ部動作指定
(1)機能
UNIT内 PID メモリ部に対して動作設定を行う。
(2)コマンドデータ
表 3-6 PID メモリ部動作指定コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “SPDS”: PID メモリ部動作指定コマンド
PID set 1byte
“N”:PID メモリ指定の制御をしない
“Y”: PID メモリ指定の制御をする
“N”の場合は以降のパラメータは
無効
但し、フィールド内の設定は必
要。
PID Mem code 2byte
“XX”:PID メモリ番号を指定
(例) PID メモリ0面指定:”00”
PID メモリ1面指定:”01”
”00”or”01”のみ指定可能
PID Port code 2byte
“XX”:ポート番号を指定
(例) TSIN01のとき“01”
TSIN02のとき“02”
TSIN06のとき“06”
TS 部のポート番号も 01~06 ま
での範囲とする。
PID set type 1byte
“0”:PID受信禁止
“1”:PID受信許可
“2”:PID変更処理
“3”:全 PID受信許可
“4”:全 PID受信禁止
type=“3”or”4” のときは以降の
パラメータは無効
PID set_PID 6byte
処理対象の PID値を指定
例)“0x1FFE”:PID値 0x1FFE を指定
“0x0010”:PID値 0x0010を指定
PID chg_PID 6byte
変更後の PID値を指定
例)“0x1FFF”:PID 値 0x1FFF に変更指
定
“0x0011”:PID 値 0x0011 に変更指
定
本パラメータは type=“2”のみ有
効
(3)レスポンスデータ
表 3-7 PID メモリ部動作指定応答
フィールド サイズ 定義 備考
コマンド名 4byte “SPDS”: PID メモリ部動作指定応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
10 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.3. PID メモリ部更新指定
(1)機能
UNIT内 PID メモリ部に対して0面⇔1面の更新設定を行う。
(2)コマンドデータ
表 3-8 PID メモリ部動作指定コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “SPSS”: PID メモリ部更新指定コマンド
PID up set 1byte
“N”: PID メモリ指定の更新制御をしない
“Y”: PID メモリ指定の更新制御をする
“N”の場合は以降のパラメータは
無効
但し、フィールド内の設定は必
要。
PID Port code 2byte
“XX”:ポート番号を指定
(例) TSIN01のとき“01”
TSIN02のとき“02”
TSIN06のとき“06”
TS 部のポート番号も 01~06 ま
での範囲とする。
PID Mem code 1byte
”XX”:PID メモリ番号を指定
(例) PID メモリ0面指定:”00”
PID メモリ1面指定:”01”
※Unit(UM6200)は PID フィルタ用メモリと PID変換用メモリを実装しており、PID メモリ部更新の際は
PID変換用メモリ → PID フィルタ用メモリ の順での更新となる。
(3)レスポンスデータ
表 3-9 PID メモリ部動作指定応答
フィールド サイズ 定義 備考
コマンド名 4byte “SPSS”: PID メモリ部更新指定応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
11 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.4. MUX部動作指定
(1)機能
UNIT内MUX部に対して動作設定を行う。
(2)コマンドデータ
表 3-10 MUX部動作指定コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “SMUS” : MUX部動作指定コマンド
MUX MODE 2byte
”XX”:レートクロックモードを指定
38.88[Mbps]出力(188byte):”00”
7.776[Mbps]出力 (188byte):”01”
42.19[Mbps]出力(204byte):”02”
8.438[Mbps]出力 (204byte):”03”
MUX TX 1byte
“N”:MUX出力OFF
“Y”:MUX出力ON
MUX PCR 1byte
“N”:PCR再スタンプ OFF
“Y”:PCR再スタンプON
通常、”Y”固定
※Unit(Um6200)は、MUX出力OFF時は設定レートで NULLを出力する。
(3)レスポンスデータ
表 3-11 MUX部動作指定応答
フィールド サイズ 定義 備考
コマンド名 4byte “SMUS”: MUX部動作指定応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
12 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.5. TS IN部動作連続指定
(1)機能
UNIT内 TS IN部の複数のポートに対して動作設定(ON/OFF)を同時に行う。
(2)コマンドデータ
表 3-12 TS IN部動作連続指定コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “STSR”: TSIN部動作指定コマンド
block num 2byte
”XX”:連続ブロック数を指定 以降のパラメータをブロック数分
繰り返す。
最大ブロック数=“06”
TSIN set 1byte “N”:TSIN部を動作指定しない
“Y”:TSIN部を動作指定する
TSIN Port code 2byte
“XX”:ポート番号を指定
(例) TSIN01のとき”01”
TSIN02のとき”02”
TSIN06のとき”06”
TS 部のポート番号も 01~06 ま
での範囲とする。
TSIN Flame length 3byte “188”:188byte指定
“204”:204byte指定
TSIN Tx 1byte “N”:TSIN部を OFF指定
“Y”:TSIN部をON指定
※連続ブロック内に、同じポートを指定した場合は、異常と判断する。
※連続ブロック内に、異常が 1つでもある場合は、全て反映しない。
(3)レスポンスデータ
表 3-13 TS IN部動作連続指定応答
フィールド サイズ 定義 備考
コマンド名 4byte “STSR”: TSIN部動作指定応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
13 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.6. PID メモリ部連続更新指定
(1)機能
UNIT内 PID メモリ部に対して0面⇔1面の更新設定を同時に行う。
(2)コマンドデータ
表 3-14 PID メモリ部動作指定コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “SPSR”: PID メモリ部更新指定コマンド
block num 2byte
”XX”:連続ブロック数を指定 以降のパラメータをブロック数分
繰り返す。
最大ブロック数=“06”
PID up set 1byte “N”: PID メモリ指定の更新制御をしない
“Y”: PID メモリ指定の更新制御をする
“N”の場合は以降のパラメータは
無効
PID Port code 2byte
“XX”:ポート番号を指定
(例) TSIN01のとき“01”
TSIN02のとき“02”
TSIN06のとき“06”
TS 部のポート番号も 01~06 ま
での範囲とする。
PID Mem code 1byte
”XX”:PID メモリ番号を指定
(例) PID メモリ0面指定:”00”
PID メモリ1面指定:”01”
※連続ブロック内に、同じポートを指定した場合は、異常と判断する。
※連続ブロック内に、異常が 1つでもある場合は、全て反映しない。
※Unit(UM6200)は PID フィルタ用メモリと PID変換用メモリを実装しており、PID メモリ部更新の際は
PID変換用メモリ → PID フィルタ用メモリ の順での更新となる。
(3)レスポンスデータ
表 3-15 PID メモリ部動作指定応答
フィールド サイズ 定義 備考
コマンド名 4byte “SPSR”: PID メモリ部更新指定応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
14 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.7. Unit動作指定状態・ステータス一括問合せ
(1)機能
ユニット各部の設定状態やステータス、アラームを一括して問い合わせる。
(2)コマンドデータ
表 3-16 Unit動作指定状態・ステータス一括問合せコマンド
フィールド サイズ 定義 備考
コマンド名 4byte “RUNA”: Unit動作指定状態
ステータス一括問合せコマンド
(3)レスポンスデータ
表 3-17 Unit動作指定状態・ステータス一括問合せ応答
フィールド サイズ 定義 備考
コマンド名 4byte “RUNA”: Unit動作指定状態
・ステータス一括問合せ応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。
Unit alarm 8byte 8桁で Unit内のアラームを示す アラームコードの詳細は付録の表
を参照の事
TSIN Tx 1byte “N”:TSINデータ停止中
“Y”:TSINデータ送出中
TS 部のポート 01~06 に対応し
て繰り返す。
※TSIN Tx・TSIN Flame・PID
Mem codeは × 6存在する TSIN Flame 3byte
“188”:188byte指定
“204”:204byte指定
PID Mem code 2byte
”XX”:PID メモリ番号
(例) PID メモリ0面指定:”00”
PID メモリ1面指定:”01”
MUX Tx 1byte “N”:MUXデータ停止中
“Y”:MUXデータ出力中
MUX MODE 2byte
”XX”:レートクロックモードを指定
38.88[Mbps]出力(188byte):”00”
7.776[Mbps]出力 (188byte):”01”
42.19[Mbps]出力(204byte):”02”
8.438[Mbps]出力 (204byte):”03”
MUX alarm1 8byte 8桁でmux 部アラームを示す アラームコードの詳細は付録の表
を参照の事。
MUX alarm2 8byte ASCII コード 8 桁で TSIN エラーの詳細を
示す(TSIN1~8)
アラームコードの詳細は付録の表
を参照の事。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
15 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.8. PID メモリ部セクションデータ問合せ
(1)機能
PID メモリ部に登録(受信)されているセクションデータを問い合わせる。
(2)コマンドデータ
表 3-18 PID メモリデータ問合せコマンド
フィールド サイズ 定義 備考
コマンド名 4byte “RPDF”: PID メモリデータ問合せコマンド
PID Mem code 2byte
“XX”:PID メモリ番号を指定
(例) PID メモリ0面指定:”00”
PID メモリ1面指定:”01”
”00”or”01”のみ指定可能
PID Port code 2byte
“XX”:ポート番号を指定
例)TSIN01の PID メモリ指定:”01”
TSIN02の PID メモリ指定:”02”
TSIN06の PID メモリ指定:”06”
TS部のポート番号も 01~06
までの範囲とする。
(3)レスポンスデータ
表 3-19 PID メモリデータ問合せ応答
フィールド サイズ 定義 備考
コマンド名 4byte “RPDF”: PID メモリデータ問合せ応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。
PID Mem code 2byte “XX”: 指定された PID メモリ番号を指定
PID Port code 2byte “XX”:指定されたポート番号
PID set num 3byte “XXX”:PID処理セット数を指定
例) PID処理を 10個指定したとき”010”
セット数により以降のパラメータを
セット数分繰り返す。
PID set type 1byte
“0”:PID受信禁止
“1”:PID受信許可
“2”:PID変更処理
“3”:全 PID受信許可
“4”:全 PID受信禁止
type=“3”or”4” のときは以降の
パラメータは無効。
PID set_PID 6byte
処理対象の PID値を指定
例)”0x1FFE”:PID値 0x1FFE を指定
”0x0010”:PID値 0x0010を指定
PID chg_PID 6byte
変更後の PID指定値
例)”0x1FFF”:PID 値 0x1FFF に変更指
定
“0x0011”:PID 値 0x0011 に変更指
定
本パラメータは type=“2”のみ有
効。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
16 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
3.5.9. バージョン確認コマンド
(1)機能
ファームウェアバージョン読み出しコマンドを発行する。
(2)コマンドデータ
表 3-20 バージョン確認コマンド
フィールド サイズ 定義 備考
コマンド名 4byte “DUNV”: バージョン確認コマンド
(3)レスポンスデータ
表 3-21 バージョン確認応答
フィールド サイズ 定義 備考
コマンド名 4byte “DUNV”: バージョン確認応答
処理結果 2byte
=:正常終了
=:異常終了
=:共通要因エラー
詳細は付録の要因コードを参照
の事。
version no. 10byte “UM6200△001”
※△はスペースコード

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
17 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
4. コマンド/レスポンスシーケンス
4.1. 正常シーケンス
下記のように、分割したコマンドを送信開始してから、レスポンス受信までが正常なシーケンスとなる。
図 4-1 正常シーケンス
(クライアント) (サーバ)
connect(SYN)
コマンド
レスポンス
close(FIN)
(コマンド送信開始)
(レスポンス受信完了)
A.コマンド受信待機
B.コマンド受信処理
(コマンド受信完了)
C.コマンド処理状態
(レスポンス送信開始)
D.レスポンス送信処理
A.コマンド受信待機
接続待機状態
注)1回の接続で複数コマンド-レスポンスの送受信を行っても良い。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
18 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
4.2. 異常シーケンス
送信側からコマンドを送信後、一定期間経過してもレスポンスを受信できない場合には、以下の要因による
状況である。この場合には、コマンド発行側はコマンドを再送することとする。
・ コマンド受信側装置にてコマンドを受信していない場合
・ コマンド受信側装置からのレスポンスを受信できない場合
・ コマンド発行側または受信側のいずれかの装置にて不適合が発生している場合
図 4-2 コマンド受信側装置にてコマンドを受信していない場合
(クライアント) (サーバ)
connect(SYN)
コマンド
コマンド
(コマンド送信開始)
(コマンド再送信開始)
A.コマンド受信待機
接続待機状態
(タイムアウト)

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
19 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
図 4-3 コマンド受信側装置からのレスポンスを受信できない場合
(クライアント) (サーバ)
connect(SYN)
コマンド
レスポンス
コマンド
(コマンド送信開始)
(コマンド再送信開始)
A.コマンド受信待機
B.コマンド受信処理
(コマンド受信完了)
C.コマンド処理状態
(レスポンス送信開始)
D.レスポンス送信処理
A.コマンド受信待機
接続待機状態
(タイムアウト)
B.コマンド受信処理
(コマンド受信完了)

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
20 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
付録)処理結果要因コード表
処理結果 意 味 有効コマンド
“00” 正常終了 全コマンド
“01” コマンドデータ長に無効な文字が含まれる 全コマンド
“02” 受信データ長とコマンドデータ長が矛盾する 全コマンド
“03” 未定義コマンド 全コマンド
“04” 受信データ長とコマンドに必要なデータ長が一致しない 全コマンド
“05” コマンドデータ部に無効な文字が含まれる 全コマンド
“06” パラメータの数値が規定範囲外である 全コマンド
“09” バックアップデータ書き込み中である 全コマンド
“61” PID メモリ動作指定限界設定数(限界数=256) “SPDS”
“62” 連続ブロック内に同一ポートがある “STSR”
“SPSR”
但し 以下の場合は受信データを破棄し無応答とする
(1) 受信データの先頭が ”0x7E” でない。
(2) 受信データ数が17バイト未満である。

(付録)UM6200 システム UNIT-CONTROLLER 間通信 IF 仕様書_rev1.02.doc
21 © Hitachi Information & Telecommunication Engineering, Ltd. 2013. All rights reserved.
付録)ステータス、アラーム コード表
(1)Unit部 アラーム(Unit alarm)
ステータス 内 容 装置 LED
“00000001” 電源 1系異常 POW1:赤点灯
“00000010” 電源 2系異常 POW2:赤点灯
“00000100” <未使用 0固定>
“00001000” ユニット内の FANエラー ALM:赤点灯
“00010000” <未使用 0固定>
“00100000” <未使用 0固定>
“01000000” <未使用 0固定>
“10000000” システムエラー(バックアップデータ異常など) ALM:赤点灯
※ FANエラーは、UM6200に取り付けられている FAN障害時(停止)に発生。
(2)MUX部 アラーム(MUX alarm1)
ステータス 内 容 装置 LED
“00000001” TSINエラー IALM:赤点灯
“00000010” <未使用 0固定>
“00000100” <未使用 0固定>
“00001000” <未使用 0固定>
“00010000” <未使用 0固定>
“00100000” FiFo エラー IALM:赤点灯
“01000000” <未使用 0固定>
“10000000” <未使用 0固定>
※ TSINエラーは、使用(ON)しているポートの何れかに入力エラー時に発生。
※ FiFo エラーは、多重化オーバーフロー時に発生。
全 TS入力ポートのレート総和(PID フィルタ後) > 出力レート
(4)MUX部 アラーム(MUX alarm2)
ステータス 内 容 装置 LED
“00000001” TSIN1 エラー IALM:赤点灯
“00000010” TSIN2 エラー IALM:赤点灯
“00000100” TSIN3 エラー IALM:赤点灯
“00001000” TSIN4 エラー IALM:赤点灯
“00010000” TSIN5 エラー IALM:赤点灯
“00100000” TSIN6 エラー IALM:赤点灯
“01000000” <未使用 0固定>
“10000000” <未使用 0固定>
※ TSIN*エラーは、以下の要因(エラー)で発生。(※エラー要因の細分化したレスポンスはしない)
・ パケット長エラー [ 204byteパケット長設定時に 188byteのパケットが入力された場合 ]
・ SYNCバイト(0x47)エラー [ 先頭バイトの 0x47が不一致の場合 ]
・ ASI同期(入力)エラー [ コネクタ断などによる TS未入力時の場合 ]




























