Embed Size (px)
Citation preview
1
Universität Bremen
Navigation bei Mensch und Tier
Thomas Röfer
BegriffMenschliche Navigation
Navigation der AmeisenNavigation der Bienen
Navigation der Vögel
Kognitive Robotik I – Navigation bei Mensch und Tier 2
Universität Bremen
Rückblick „SimRobot“GUI Mobile Roboter Roboterarme
Sensordaten Rauschen
Kognitive Robotik I – Navigation bei Mensch und Tier 3
Universität Bremen
Navigation
� Navigation� Definition
� Na|vi|ga|ti|on, die; - [lat. navigatio = Schiffahrt, zu: navigare = fahren, segeln, zu: navis = Schiff] (Seew., Flugw.): bei Schiffen, Luft- u. Raumfahrzeugen Gesamtheit der Maßnahmen zur Bestimmung des Standorts u. zur Einhaltung des gewählten Kurses.
� na|vi|gie|ren «sw. V.; hat» (Seew., Flugw.): den Standort eines Schiffes od. Flugzeugs bestimmen u. es auf dem richtigen Kurs halten: nach der Sonne, mit dem Sextanten n.
Kognitive Robotik I – Navigation bei Mensch und Tier 4
Universität Bremen
� Navigation� Definition
� Karten
Navigation
Kognitive Robotik I – Navigation bei Mensch und Tier 5
Universität Bremen
Navigation
� Navigation� Definition
� Karten
� Selbstlokalisation in der Seefahrt
Kognitive Robotik I – Navigation bei Mensch und Tier 6
Universität Bremen
Menschliche Nav. - Perspektiven
� Perspektiven
BeobachterperspektiveFeldperspektive
2
Kognitive Robotik I – Navigation bei Mensch und Tier 7
Universität Bremen
Menschliche Nav. - Referenzsysteme
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
Kognitive Robotik I – Navigation bei Mensch und Tier 8
Universität Bremen
Menschliche Nav. - Referenzsysteme
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme
Kognitive Robotik I – Navigation bei Mensch und Tier 9
Universität Bremen
Menschliche Nav. - Egozentrisch
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische Richtungen
Kognitive Robotik I – Navigation bei Mensch und Tier 10
Universität Bremen
Menschliche Nav. - Imaginär
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische Richtungen� Imaginär
Kognitive Robotik I – Navigation bei Mensch und Tier 11
Universität Bremen
Menschliche Nav. - Richtungseffekt
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische Richtungen� Imaginär� Richtungseffekt� Priming
PrimePrime PausePause Target/ReaktionszeitTarget/Reaktionszeit
100ms 350-850ms ?ms
Kognitive Robotik I – Navigation bei Mensch und Tier 12
Universität Bremen
Menschliche Nav. - Richtungseffekt
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische Richtungen� Imaginär� Richtungseffekt� Priming
� Ergebnisse
350ms 600ms 850ms
Film vorwärts Film rückwärts

3
Kognitive Robotik I – Navigation bei Mensch und Tier 13
Universität Bremen
Menschliche Nav. - Routenbeschr.
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische Richtungen� Imaginär� Richtungseffekt� Priming
� Ergebnisse
� Routenbeschreibung� Text
Kognitive Robotik I – Navigation bei Mensch und Tier 14
Universität Bremen
Menschliche Nav. - Routenbeschr.
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische
Richtungen� Imaginär� Richtungseffekt� Priming� Ergebnisse
� Routenbe-schreibung� Text
Kognitive Robotik I – Navigation bei Mensch und Tier 15
Universität Bremen
Menschliche Nav. - Routenbeschr.
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische Richtungen� Imaginär� Richtungseffekt� Priming
� Ergebnisse
� Routenbeschreibung� Text
� Zeichnung
Kognitive Robotik I – Navigation bei Mensch und Tier 16
Universität Bremen
Menschliche Nav. - Routenbeschr.
� Perspektiven� Referenzsysteme� egozentrisch (intrinsisch)
� allozentrisch (deiktisch)
� Objektreferenzsysteme� Egozentrische Richtungen� Imaginär� Richtungseffekt� Priming
� Ergebnisse
� Routenbeschreibung� Text
� Zeichnung
Kognitive Robotik I – Navigation bei Mensch und Tier 17
Universität Bremen
Kognitive Robotik I – Navigation bei Mensch und Tier 18
Universität Bremen
Ameisennavigation - Wegintegration
� Ameisennavigation� Wegintegration
4
Kognitive Robotik I – Navigation bei Mensch und Tier 19
Universität Bremen
Ameisennavigation - Wegintegration
� Ameisennavigation� Wegintegration
� Experimente
Kognitive Robotik I – Navigation bei Mensch und Tier 20
Universität Bremen
Bienennavigation - Koppelnavigation
� Ameisennavigation� Wegintegration
� Experimente
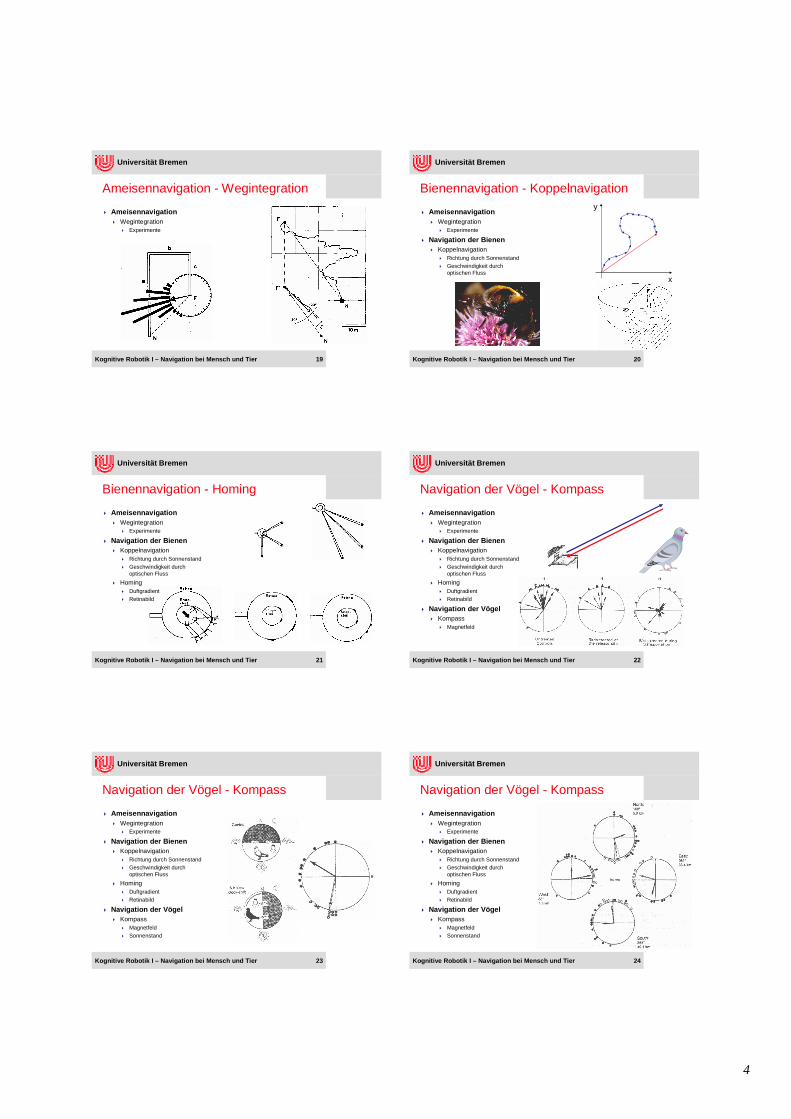
� Navigation der Bienen� Koppelnavigation
� Richtung durch Sonnenstand� Geschwindigkeit durch
optischen Flussx
y
Kognitive Robotik I – Navigation bei Mensch und Tier 21
Universität Bremen
Bienennavigation - Homing
� Ameisennavigation� Wegintegration
� Experimente
� Navigation der Bienen� Koppelnavigation
� Richtung durch Sonnenstand� Geschwindigkeit durch
optischen Fluss
� Homing� Duftgradient� Retinabild
Kognitive Robotik I – Navigation bei Mensch und Tier 22
Universität Bremen
Navigation der Vögel - Kompass
� Ameisennavigation� Wegintegration
� Experimente
� Navigation der Bienen� Koppelnavigation
� Richtung durch Sonnenstand� Geschwindigkeit durch
optischen Fluss
� Homing� Duftgradient� Retinabild
� Navigation der Vögel� Kompass
� Magnetfeld
Kognitive Robotik I – Navigation bei Mensch und Tier 23
Universität Bremen
Navigation der Vögel - Kompass
� Ameisennavigation� Wegintegration
� Experimente
� Navigation der Bienen� Koppelnavigation
� Richtung durch Sonnenstand� Geschwindigkeit durch
optischen Fluss
� Homing� Duftgradient� Retinabild
� Navigation der Vögel� Kompass
� Magnetfeld� Sonnenstand
Kognitive Robotik I – Navigation bei Mensch und Tier 24
Universität Bremen
Navigation der Vögel - Kompass
� Ameisennavigation� Wegintegration
� Experimente
� Navigation der Bienen� Koppelnavigation
� Richtung durch Sonnenstand� Geschwindigkeit durch
optischen Fluss
� Homing� Duftgradient� Retinabild
� Navigation der Vögel� Kompass
� Magnetfeld� Sonnenstand
5
Kognitive Robotik I – Navigation bei Mensch und Tier 25
Universität Bremen
Navigation der Vögel - Rasterkarte
� Ameisennavigation� Wegintegration
� Experimente
� Navigation der Bienen� Koppelnavigation
� Richtung durch Sonnenstand� Geschwindigkeit durch
optischen Fluss
� Homing� Duftgradient� Retinabild
� Navigation der Vögel� Kompass
� Magnetfeld� Sonnenstand
� Rasterkarte
Kognitive Robotik I – Navigation bei Mensch und Tier 26
Universität Bremen
Navigation der Vögel - Mosaikkarte
� Ameisennavigation� Wegintegration
� Experimente
� Navigation der Bienen� Koppelnavigation
� Richtung durch Sonnenstand� Geschwindigkeit durch
optischen Fluss
� Homing� Duftgradient� Retinabild
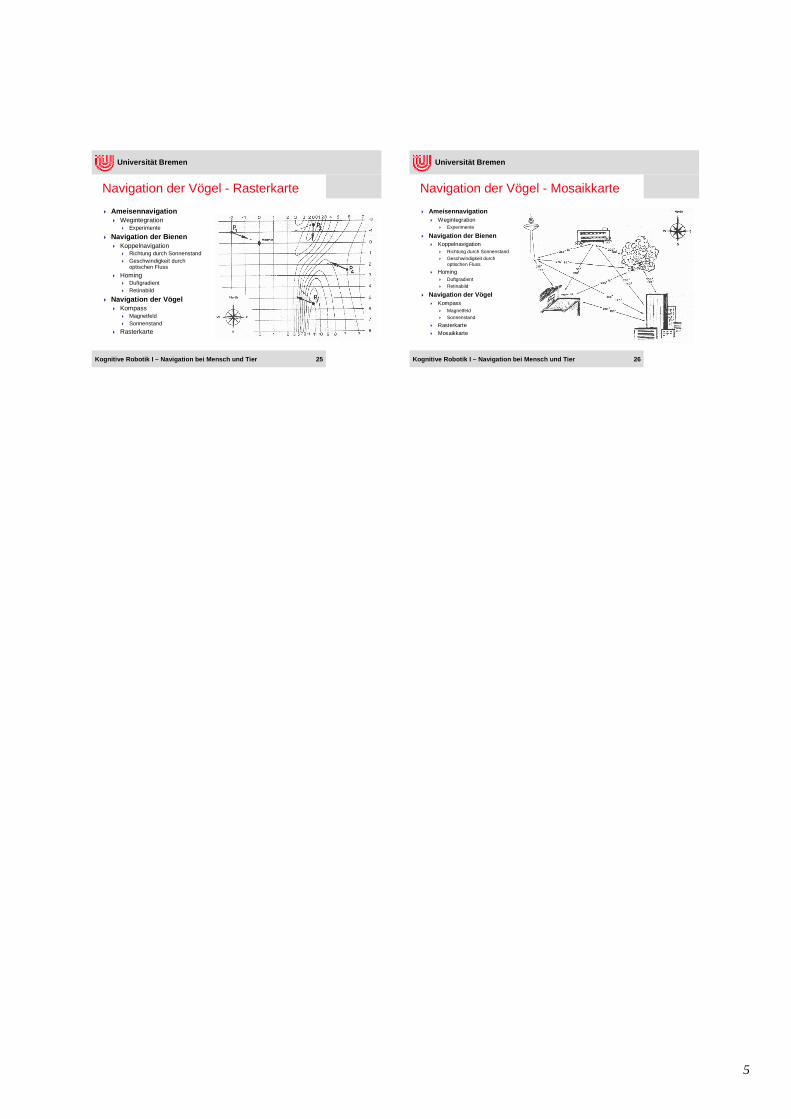
� Navigation der Vögel� Kompass
� Magnetfeld� Sonnenstand
� Rasterkarte� Mosaikkarte





























