Embed Size (px)
Citation preview
Univerzita Komenskeho, Bratislava
Fakulta matematiky, fyziky a informatiky
Teoreticka mechanika
Bratislava, 2014 B. Rabatin

Obsah
Uvod 1
1 Matematicky aparat teoretickej mechaniky 31.1 Einsteinova sumacna konvencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Zakladne operacie s vektormi podl’a Einsteinovej sumacnej konvencie . . . . . . . . . . 31.1.2 Diferencialny operator ~∇, divergencia, gradient a rotacia . . . . . . . . . . . . . . . . . 6
1.2 Prıklady na vektorovy a diferencialny pocet v Einsteinovej sumacnej konvencii . . . . . . . . 81.2.1 Vektorove identity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.2 Diferencialne operatory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.3 Gauss-Ostrogradskeho veta* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2.4 Kelvin-Stokesova veta* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Mechanika sustavy viazanych hmotnych bodov 122.1 d’Alembertov - Lagrangeov princıp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.1 Vazby, vazbove rovnice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.1.2 Aktıvne sily, reakcne sily vazieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.1.3 Nezavisle vazby, dimenzia konfiguracneho priestoru . . . . . . . . . . . . . . . . . . . . 132.1.4 Princıp virtualneho posunutia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.5 d’Alembertov - Lagrangeov princıp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Lagrangeove rovnice II. druhu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.1 Zovseobecnene suradnice, Lagrangeove rovnice II. druhu . . . . . . . . . . . . . . . . . 192.2.2 Zakony zachovania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.2.3 Zakon zachovania energie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.3 Princıp najmensieho ucinku . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.3.1 Matematicke okienko do variacneho poctu . . . . . . . . . . . . . . . . . . . . . . . . . 302.3.2 Ucinok, princıp extremalneho ucinku . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4 Hamiltonove rovnice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.4.1 Legendreova transformacia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.4.2 Hamiltonove rovnice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.4.3 Poissonove zatvorky . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3 Dalsie aplikacie Lagrangeovskeho a Hamiltonovskeho prıstupu v mechanike 413.1 Potencialna energia a sila* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.1.1 Zovseobecnena potencialna energia* . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.1.2 Nepotencialova zlozka sily a jej vykon* . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2 Fazovy priestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.2.1 Kvalitatıvne riesenie Hamiltonovych rovnıc* . . . . . . . . . . . . . . . . . . . . . . . . 503.2.2 Liouvilleova veta* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.3 Skalovanie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.4 Problem dvoch telies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.5 Male kmity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.5.1 Prıklady z kmitov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 833.6 Pohyb v neinercialnej vzt’aznej sustave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.6.1 Vol’ny pad telesa na rotujucu zem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 953.7 Tuhe teleso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.7.1 Kineticka energia, rotacna energia a moment zotrvacnosti tuheho telesa . . . . . . . . 1023.7.2 Steinerova veta a veta o kolmych osiach* . . . . . . . . . . . . . . . . . . . . . . . . . 1073.7.3 Kinematika vol’neho sferickeho zotrvacnıka . . . . . . . . . . . . . . . . . . . . . . . . . 1103.7.4 Eulerove rovnice pre rotaciu tuheho telesa, Eulerove uhly . . . . . . . . . . . . . . . . 1113.7.5 Dalsie prıklady* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
ii

OBSAH
4 Uvod do mechaniky kontinua a hydrodynamiky 1234.1 Vseobecna pohybova rovnica kontinua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1244.2 Kvapaliny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
4.2.1 Tok idealnej kvapaliny, Eulerova rovnica . . . . . . . . . . . . . . . . . . . . . . . . . . 1274.2.2 Rovnica kontinuity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1294.2.3 Tok idealnej nestlacitel’nej kvapaliny . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1294.2.4 Hydrostatika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1304.2.5 Stacionarne tecenie nevıroveho pol’a, Bernoulliho rovnica . . . . . . . . . . . . . . . . . 1314.2.6 Fyzikalna interpretacia vırivosti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1334.2.7 Tok viskoznej kvapaliny, Navier-Stokesova rovnica . . . . . . . . . . . . . . . . . . . . 1374.2.8 Dalsie prıklady z hydrodynamiky riesitel’ne analyticky* . . . . . . . . . . . . . . . . . 139
4.3 Pruzne kontinuum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1564.3.1 Tenzor deformacie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1564.3.2 Hookov zakon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1574.3.3 Hookov zakon pre homogenne a izotropne kontinuum . . . . . . . . . . . . . . . . . . . 1594.3.4 Objemova dilatacia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1604.3.5 Homogenne a izotropne pruzne kontinuum, Lameho rovnica . . . . . . . . . . . . . . . 160
4.4 Vlny v pruznom kontinuu a v kvapalinach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1614.4.1 Vlny v izotropnom pruznom kontinuu . . . . . . . . . . . . . . . . . . . . . . . . . . . 1614.4.2 Vlny v idealnej kvapaline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
iii

Uvod
Napriek tomu, ze je cely tento text chapany ako okrajovy doplnkovy material, bez ktoreho sa predmetteoreticka mechanika bez problemov zaobıde, som mal cely cas nutkanie napısat’ o tychto zalezitostiach conajviac a co najzaujımavejsie. Mnohokrat uz pocas pısania ba aj po napısanı a pri naslednej kontrole somsa prichytil ako uvazujem, co vsetko by sa este dalo doplnit’, co vsetko tu este nie je a kol’ko zaujımavychprıkladov a demonstracii by sa mohlo v tomto texte este nachadzat’. Tieto myslienky treba v istom okamihurazne stopnut’, inac sa zo 100 stranoveho textu za isty cas stane 150 stranovy, nasledne 200 stranovy,potom 300 stranovy a kto ovlada inziniersku indukciu, dojde ku divergencii jeho rozsahu s casom iducim donekonecna (este ze zijeme obmedzeny cas). Uzitocna fraza, ktoru som si zopakoval, najma pri kontrole adiskusii tohto textu s inymi l’ud’mi bola, ze predsa mojım ciel’om nie je ,,spasit’ svet”. V opacnom prıpadeby hrozilo, ze uz i tak dlhy text nadobudne formu zbierky toho, co povazujem za zaujımave, no s casom(a rozsahom) rastucim nad vsetky medze by sa text nenavratne vzd’aloval od sylabu a myslienky tohtopredmetu. Napriek raznym pokusom priskrtit’ moje vycınanie sa stalo, ze nie vsetky veci tu spısane sanaozaj aj skusaju, ba dokonca vobec spomınaju na prednaske. V takom prıpade su prıslusne casti oznacenehviezdickou (dana cast’ je uzitocna a vyzaduje sa ako vseobecna vedomost’ ku skuske), poprıpade dvomahviezdickami (keby tu dana dvojhviezdickova cast’ nebola, vobec nic by sa nestalo). Po tomto podivnomuvode k uvodu by sme mohli prejst’ ku serioznemu uvodu, ktory aj spomenie, o com predmet vlastne bude.
O com je vlastne teoreticka mechanika? Citatel’ ma mozno po absolvovanı predmetu mechanika pocit,ze vie vsetko vypocıtat’ a nic v mechanike mu uz problem nerobı. Opak je pravdou, tı pozornejsı muselipostrehnut’, ze cela mechanika je v podstate t’azko univerzalne obsiahnutel’na oblast’ problemov, no tam,kde existuje ista algoritmizacia riesenia mechanickych problemov, je dobre ju najst’ a naucit’ sa ju pouzıvat’.Tymto rozhodne nechceme naznacovat’, ze kurzom teoreticka mechanika je uz vyrieseny kazdy problem adruh problemu v mechanike. Dalo by sa povedat’, ze napriek zlozitosti a krase tychto algoritmov, sme pokrylilen isty zlomok toho, co vsetko by sa este mohlo dat’ vyriesit’. Sikovnemu citatel’ovi nic nebrani zobrat’ doruky pero, d’alej stavat’ na tychto odvodeniach vlastne uvahy a pokusit’ sa riesit’ d’alsie mechanicke problemy,ktore samozrejme nemozu byt’ vsetky zaradene do jedineho jednosemestralneho kurzu.
Od predmetu mechanika sa lısi hlavne prıstupom k jednotlivym mechanickym problemom. Jednouz hlavnych vyhod teoretickeho prıstupu k mechanike je samotne osetrovanie vazieb pohybu. V klasickomprıstupe k mechanike je potrebne pre kazdu vazbu (napr. kyvadlo viazane palickou ku stene) uvazovat’ sily,ktore dane teleso udrzuju na drahe, ktoru tato vazba urcuje. Toto moze byt’ vo vseobecnosti vel’mi obtiazne.Ukazuje sa, ze hl’adat’ tieto sily v skutocnosti nie je potrebne, stacı poznat’ vazbove rovnice a tzv. aktıvnesily, ktore su v systeme prıtomne.
Prvy prıstup, v ktorom nepotrebujeme poznat’ priamo sily vazieb je d’Alambertov - Lagrangeov princıp,ktory sa ale ukaze byt’ nie vel’mi vhodny na riesenie praktickych problemov mechaniky. Obsahuje totiz viacrovnıc, ako je na riesenie nutne. Ako d’alsie sa vyuzije najdenie takej parametrizacie, ktora splna vazboverovnice a hlavnym vystupom budu Lagrangeove rovnice.
V d’alsej casti tohto kurzu sa budeme venovat’ Hamiltonovym rovniciam, ktore za cenu zdvojnasobeniapoctu rovnıc znızia ich rad. Hamiltonian sa objavuje hlavne v kvantovej mechanike, avsak je uzitocne sa snım oboznamit’ uz teraz.
V nasledujucej kapitole sa venujeme neinercialnym vzt’aznym sustavam a problemom tykajucich satuhych telies.
V poslednej casti pokracujeme temou o kontinuu, kde sa pozrieme na kvapaliny a elasticke kontinuum.Pri kvapalinach opustıme zname vody Lagrangeovskeho opisu systemu a vyuzijeme Eulerov opis, co vsaknakoniec prinesie svoj uzitok.
Pri vsetkych tychto temach sa naucıme aktıvne pouzıvat’ Einsteinovu sumacnu konvenciu a roznepomocky skracujuce zapis, co setrı miesto a zdravy rozum v odvodeniach. Tento aparat je vel’mi uzitocnyaj ku d’alsım predmetom (teoria relativity, kde sa indexova matematika privedie do uplne inej urovne,poprıpade teoria elektromagnetickeho pol’a a ine) a fyzik sa bez neho urcite nezaobıde (avsak kazdy clovekma inu hranicu straty zdraveho rozumu). Aj ked’ je mozne vsetky odvodenia prejst’ kompletne bez pouzıvaniatohto aparatu, je vel’mi silno odporucane si ho rychlo osvojit’, ked’ze jeho krasa a vyhody d’aleko prevysujutych par hodın namahy.
1

OBSAH
Tento text je zalozeny na prednaskach doc. Mariana Fecka z predmetu Teoreticka mechanika. Kvalitatychto prednasok je kazdorocne vyzdvihovana v studentskej ankete. Samotny text sa opiera o zrozumi-tel’ny vyklad na prednaskach a v niektorych smeroch ho rozsiruje o riesenia d’alsıch zaujımavych problemovmechaniky.
Moja vel’ka vd’aka patrı Frantiskovi Hermanovi, ktory znovu presiel cele skripta a naozaj detailne savenoval ich obsahu aj forme, co ho stalo urcite vel’a nervov a casu. Napriek tomu, kol’ko energie bolo vlozenejdo opravy samotnych skrıpt sa urcite este vel’a chyb nenaslo. Najlepsia spatna vazba vsak pochadza odsamotnych citatel’ov, preto prosıme priamo Vas: akukol’vek nezrovnalost’, nejasnost’, nebodaj chybu, nicnehovoriaci obrazok, alebo cokol’vek, co by sa Vam nezdalo nam poslite na mail [email protected], urcitesa budeme periodicky snazit’ o napravu nahromadenych chyb1.
1Napısat’ mozete aj ked’ nas chcete potesit’, skritizovat’ nas, alebo nam len zapriat’ pekny den.
2

1Matematicky aparat teoretickej mechaniky
V tomto ucebnom texte budeme pouzıvat’ rozne znacky, skratky a konvencie, ktore maju za ciel’ skratit’,zjednodusit’ a zintuitıvnit’ zapisy, ktore budeme pouzıvat’.
Je dobre pri odvodenı mnohych vektorovych rovnıc pracovat’ len s jednou komponentou naraz. Ak sadaju tieto odvodenia robit’ vseobecne pre i-tu komponentu, budeme to tak robit’. Namiesto vektora ~A takbudeme napr. pre jeho i-tu zlozku pısat’ Ai. V texte budeme taktiez hojne vyuzıvat’ koncepciu vol’nych ascıtacıch indexov, ktora ma nazov Einsteinova sumacna konvencia.
1.1 Einsteinova sumacna konvencia
Jednoduchy popis tejto konvencie je, ze ak sa vo vyraze obajvı nejaky index dvakrat, automaticky toimplikuje sumaciu. Takyto index budeme volat’ scıtacı. Vyvstava otazka, ake su hranice sumacie, co akmam vo vyraze jeden index len jedenkrat a co ak mam vo vyraze jeden index viac nez dva razy? Ak mamevo vyraze index, ktory sa tam nachadza len jedenkrat, ide o tzv. vol’ny index, teda vysledok vyrazu zavisıod konkretnej vol’by indexu (co za neho dosadıme). Najlepsie sa na tuto otazku odpoveda v prıkladoch. Aksa vo vyraze nachadza niektory index viac nez dvakrat, ide o nezmysel, teda o preklep (aspon co sa tykaEinsteinovej sumacnej konvencie, ako taka nepozna, co je vyraz s troma rovnakymi indexami). Ak sme sivedomı, ze tie tri indexy maju opodstatnenie, sumu rucne pripıseme. Co sa tyka hranıc sumacie, povacsinousa sumuje od 1 po 3, ak sa nachadzame v priestore R3, no hranice zavisia od konkretnej situacie (v prıpadeporiadneho znacenia sa daju hranice dobre urcit’ a nebyva s tym problem).
1.1.1 Zakladne operacie s vektormi podl’a Einsteinovej sumacnej konvencie
Symboly δij a εijk
Vyraz δij sa nazyva Kroneckerova delta (popr. Kroneckerov delta symbol). Ako na prvy pohl’ad vidno,su v nom prave dva rozne indexy, kazdy z nich pouzity len jedenkrat, teda oba su vol’ne (teda vysledok zavisıod ich vol’by, co za ne konkretne dosadıme). Ked’ze su oba vol’ne, ocakava sa, ze doplnıme, co je vysledkomvyrazu δij pre konkretne i a j. Definıcia znie jednoducho:
δij =
1, i = j
0, i 6= j.(1.1)
Tato definıcia naozaj urcı hodnotu vyrazu δij pre akekol’vek i a j, ktore si vymyslıme. Dalsiu pracu stymto symbolom uvidıme na praktickych prıkladoch, no jeden si mozeme dovolit’ uz teraz:
δii = δ11 + δ22 + δ33 = 1 + 1 + 1 = 3 (1.2)
3

1.1. EINSTEINOVA SUMACNA KONVENCIA
Vyraz εijk je Levi-Civitov symbol, je to uplne antisymetricky tenzor. Je zdlhave definovat’ tento vyrazpre kazde i, j a k (1 ≤ i, j, k ≤ 3), ale platı, ze ε123 = 1 a navyse pri vymene akychkol’vek dvoch indexov saznamienko zmenı na opacne:
ε123 = 1
εijk = −εjik = −εkji = −εikj(1.3)
Z tejto definıcie je jednoduche odvodit’, ze ak sa pri Levi-Civitovom symbole zhoduju aspon dva indexy,cely vyraz je nulovy. Napr.:
ε123 = 1 ε132 = −1ε131 = 0 ε321 = −1ε33k = 0
Davis Cup identita
Platı vel’mi dolezita a casto vyuzıvana identita1:
εijkεmnk = δimδjn − δinδjm (1.4)
Baza R3
V trojrozmernom Euklidovskom priestore existuje pravouhla pravotociva baza. Tato baza je tvorenatroma vektormi jednotkovej dlzky, ktore su navzajom kolme. Zvycajne sa oznacuju ~i, ~j a ~k (jednotkovyvektor v smere osi x, v smere osi y a v smere osi z). Pre potreby Einsteinovej sumacnej konvencie je dobre,
ak miesto vektorov ~i, ~j a ~k pouzıvame oznacenia ~e1, ~e2 a ~e3. Potom ~e1 bude jednotkovy vektor v smere osix, ~e2 v smere osi y a ~e3 v smere osi z. Zjavna vyhoda je, ze tieto oznacenia maju v sebe index, ak tedanapıseme vektor ~ei, myslı sa tym i-ty bazicky vektor (teda vo vyraze ostane jediny vol’ny index, ktory mataku ulohu, ze ak sa chceme uz konkretne spytat’ ,,ktory?” tak si za i dosadıme konkretne cıslo).
Vektor a jeho vyjadrenie
Majme vektor ~a, ktory je z R3. Jeho zlozky budu:
~a =
a1
a2
a3
(1.5)
Ak teda budeme chciet’ vyjadrit’ nejaku zlozku vektora ~a no bez blizsej specifikacie, pouzijeme oznacenieai. Vyjadrenie tohto vektora pomocou bazy ~ei (uz pouzıvame to, co sme prave zaviedli, teda baza ~ei znamenapravotociva pravouhla baza, z ktorej sa sustredıme na jej i-tu komponentu bez blizsieho urcenia, co je tovlastne i) je suma:
~a = a1~e1 + a2~e2 + a3~e3 =
3∑i=1
ai~ei
No v zmysle Einsteinovej sumacnej konvencie si okamzite uvedomıme, ze sumu pred vyrazom mozemezmazat’, co nam niekedy moze naramne skratit’ vyrazy, s ktorymi pracujeme:
~a = ai~ei (1.6)
Je zrejme, ze index i je len scıtacı - na nom vysledok nezavisı (tak ako v prıpade urciteho integraluvysledok nezavisı na tom, ci integracnu premennu pomenujeme x, t, alebo u, vysledok bude zavisiet’ len odhranıc a tvaru funkcie). Rovnako dobre by sme mohli napısat’: ~a = aj~ej , alebo ~a = ak~ek, alebo ~a = ac~ec, ...
1Ktora dostala nazov podl’a konvencie: kazdy (vol’ny index) s kazdym (vol’nym indexom).
4

1.1. EINSTEINOVA SUMACNA KONVENCIA
Skalarny sucin
Ak teraz mame dva vektory, ~a a ~b (a vektor ~b ma zlozky oznacene bi, teda analogicky k prvemu prıpadu,ked’ sme oznacovali vektor ~a), ich skalarny sucin je dany vyrazom:
~a ·~b = a1b1 + a2b2 + a3b3 =
3∑i=1
aibi
teda podl’a Einsteinovej sumacnej konvencie pıseme:
~a ·~b = aibi (1.7)
Stvorec dlzky vektora ~a potom vypocıtame ako skalarny sucin s tym istym vektorom:
~a 2 = ~a · ~a = aiai (1.8)
Dobre by bolo zistit’, ako interaguju Kroneckerova delta a vyraz, ktory ma v sebe jeden z indexov tohtosymbolu. Skusme, co da sucin ai s δij :
aiδij = a1δ1j + a2δ2j + a3δ3j
Toto zdanlivo nikam neviedlo, avsak je treba si uvedomit’, ze pre konkretne j len jeden z vyrazov napravej strane je nenulovy (pretoze Kroneckerova delta je rovna nule, ak sa jej dva indexy nezhoduju a j mozebyt’ rovne len jedinemu cıslu). Konkretne ktory? No predsa ten, ktory trafil cıselne j, teda z troch scitancovostane jediny, a to aj :
aiδij = aj (1.9)
V praxi teraz vidıme, ze vysledok niecoho, co ma jeden vol’ny index j (lebo i je scitacı index) je zasnieco, co ma v sebe jeden vol’ny index a tym je j. Toto je dobra intuitıvna pomocka na overenie spravnostivyrazov, ktore sme pocıtali - ak sa nezhoduju vol’ne indexy toho, co pocıtame s tym, co sme dostali, niekdeje chyba.
Skalarny sucin teraz mozeme napısat’ este trochu inak, pomocou delta symbolu:
~a ·~b = aiδijbj (1.10)
Ked’ze symbol delta funguje tak, ze ,,skocı” na cudzı index a premenı ho na dostupny vol’ny (tak, akosme videli v prıklade aiδij = aj), tak si moze vybrat’, ci v tomto prıpade delta skocı na ai, alebo na bj ,vysledok nebude zavisiet’ od tejto vol’by (ani nemoze - lebo i a j su v tomto prıpade scıtacie indexy, vysledokod nich nezavisı):
aiδijbj = ajbj = aibi = ~a ·~b
Vektorovy sucin
Vektorovy sucin sa uz vyjadruje trochu zlozitejsie, budeme na to potrebovat’ εijk (tak ako sme naskalarny sucin potrebovali δij , co vsak nebolo uplne nutne). Je zvykom z vyrazov, ktore su vektory (poprıpadeviacrozmerne tenzory), vyjadrovat’ len i-tu zlozku (poprıpade ij-tu zlozku v prıpade matice, ijk-tu zlozku, ...
v prıpade viacerych rozmerov). Potom i-ta zlozka vektoroveho sucinu vektorov ~a a ~b sa pocıta nasledovne:(~a×~b
)i
= εijkajbk (1.11)
Tento fakt sa da overit’ rucne v prıpade kazdej zlozky vektoroveho sucinu. Este predtym si trebauvedomit’, ze ked’ za i dosadıme konkretne cıslo (napr. 1), tak ohl’adom j a k sa ma zmysel zaoberat’ len aki 6= j 6= k 6= i, pretoze inak εijk aj tak da nulu (vid’ definıcia εijk (1.3)).
5

1.1. EINSTEINOVA SUMACNA KONVENCIA
Mozeme sa presvedcit’ o spravnosti vyjadrenia vektoroveho sucinu pomoou Levi-Civitovho symbolu:(~a×~b
)1
= ε1jkajbk = ε123a2b3 + ε132a3b2 = a2b3 − a3b2(~a×~b
)2
= ε2jkajbk = ε213a1b3 + ε231a3b1 = a3b1 − a1b3(~a×~b
)3
= ε3jkajbk = ε312a1b2 + ε321a2b1 = a1b2 − a2b1
Ak by sme z nejakeho dovodu chceli pocıtat’ cely vektorovy sucin ako vektor, teda nie po zlozkach, je tomozne - pozname totiz i-tu zlozku vektora, ktory pocıtame, takze k nemu stacı pripısat’ i-ty bazicky vektor:
~a×~b = ~ei εijkajbk (1.12)
1.1.2 Diferencialny operator ~∇, divergencia, gradient a rotacia
Pomocou indexovej notacie je v kartezskej suradnicovej sustave definovany operator ∇i (nabla) akovyraz ∂
∂xi, co sa v nasledujucich prıpadoch ukaze byt’ opodstatnene.
V nasledujucich castiach povazujeme vyraz xi za i-tu zlozku polohoveho vektora ~r v kartezskychsuradniciach, teda x1 = x, x2 = y, x3 = z.
Divergencia
Divergencia je operator, ktory sa standardne aplikuje na vektorovu funkciu (vektor) a jej symbolickyzapis je skalarny sucin:
~∇ · ~F =(∂∂x1
, ∂∂x2
, ∂∂x3
)F1
F2
F3
=∂F1
∂x1+∂F2
∂x2+∂F3
∂x3(1.13)
Tu vidno, ze ak sme vyraz ∂∂xi
oznacili ako ∇i, potom skalarny sucin ~∇ s vektorovou funkciou da presneten vysledok, aky od divergencie ocakavame:
~∇ · ~F = ∇iFi =∂Fi∂xi
=∂F1
∂x1+∂F2
∂x2+∂F3
∂x3(1.14)
Gradient
Gradient sa pust’a na skalarnu funkciu (ale su prıpady, ked’ gradient aplikujeme na vektor), vysledkomje vektor (v prıpade, ak ho aplikujeme na vektor, vysledkom bude tenzor - matica) a jej symbolicky zapis jenasledovny:
~∇ f =(∂f∂x1
, ∂f∂x2
, ∂f∂x3
)(1.15)
V tomto prıpade prısne sledujme indexovu notaciu, k comu nas dovedie:(~∇f)i
=∂f
∂xi
Rozpısane vektorovo:
~∇f =∂f
∂xi~ei =
(∂f
∂x1,
∂f
∂x2,
∂f
∂x3
)(1.16)
co je to, co sme od gradientu ocakavali.
6

1.1. EINSTEINOVA SUMACNA KONVENCIA
Gradient pusteny na vektor by sme pocıtali nasledovne:(~∇ ~F
)ij
=∂Fj∂xi
(1.17)
Jeho vysledkom je matica:
~∇ ~F =
∂F1
∂x1
∂F1
∂x2
∂F1
∂x3
∂F2
∂x1
∂F2
∂x2
∂F2
∂x3
∂F3
∂x1
∂F3
∂x2
∂F3
∂x3
(1.18)
Nic nam vsak nebrani definovat’ gradient vektora opacne:(~∇ ~F
)ij
=∂Fi∂xj
(1.19)
Jeho vysledkom je ina matica (transponovana k tej povodnej):
~∇ ~F =
∂F1
∂x1
∂F2
∂x1
∂F3
∂x1
∂F1
∂x2
∂F2
∂x2
∂F3
∂x2
∂F1
∂x3
∂F2
∂x3
∂F3
∂x3
(1.20)
Ak v priebehu nejakych odvodenı narazıme na gradient vektora, bude vzdy zrejme, o ktory prıpad sajedna (poprıpade dostaneme oba vyssie prıpady v sucte, co je ale necitlive na zamenu indexov i a j, vd’akasymetrii).
Rotacia
Rotacia je operator, ktory sa aplikuje na vektor a pocıta sa ako vektorovy sucin:
~∇× ~F (1.21)
Potom i-ta zlozka rotacie ~F sa pocıta pomocou Levi-Civitovho symbolu εijk:(~∇× ~F
)i
= εijk∂Fk∂xj
(1.22)
Vysledkom je vektor:
~∇× ~F = εijk∂Fk∂xj
~ei =
(∂F3
∂x2− ∂F2
∂x3
)~e1 +
(∂F1
∂x3− ∂F3
∂x1
)~e2 +
(∂F2
∂x1− ∂F1
∂x2
)~e3 (1.23)
7

1.2. PRIKLADY NA VEKTOROVY A DIFERENCIALNY POCET V EINSTEINOVEJ SUMACNEJKONVENCII
1.2 Prıklady na vektorovy a diferencialny pocet v Einsteinovej sumacnejkonvencii
1.2.1 Vektorove identity
Zacneme dolezitymi (a menej dolezitymi) identitami, ktore suvisia so skalarnym a vektorovym sucinom.Vsimneme si, ze zakazdym, ked’ chceme napısat’ skalarny alebo vektorovy sucin, skontrolujeme, ci uz vovyraze nemame indexy, ake sme zamysl’ali pouzit’ - ak ano, premenıme scıtacie indexy za nove, aby smepredisli viac nez dvom rovnakym indexom vo vyraze.(
~a×~b)i
= εijk︸︷︷︸−εikj
ajbk = −εikjbkaj = −(~b× ~a
)i
=⇒ ~a×~b = −~b× ~a
~a ·(~b× ~c
)= aiεijkbjck = ckεkijaibj = bjεjkickai =⇒ ~a ·
(~b× ~c
)= ~c ·
(~a×~b
)= ~b ·
(~c× ~a
)[~a×
(~b× ~c
)]i
= εijkaj
(~b× ~c
)k
= εijkajεklmblcm = εijkεlmkajblcm(DC)
= (δilδjm − δimδjl) ajblcm =
= ajcjbi − ajbjci =[(~a · ~c
)~b−
(~a ·~b
)~c]i
=⇒ ~a×(~b× ~c
)=(~a · ~c
)~b−
(~a ·~b
)~c
Tu sa pozastavıme nad tym, ze chvıl’u predtym, ako sme chceli napısat’ εijkajbkεijkcjdk sa zhacime avsimneme si, ze takto by sme mali niektore indexy az styrikrat, preto vyraz zmenıme na εijkajbkεimncmdn.
Samostatne su oba pravdive (εijkajbk je i-ta zlozka ~a×~b, aj εijkcjdk je i-ta zlozka ~c× ~d ), no ked’ ich chcemezlucit’ spolu, je nutne indexy premenovat’:(
~a×~b)·(~c× ~d
)=(~a×~b
)i︸ ︷︷ ︸
εijkajbk
(~c× ~d
)i︸ ︷︷ ︸
εimncmdn
= εijkajbkεimncmdn =
= εjkiεmniajbkcmdn(DC)
= (δjmδkn − δjnδkm) ajbkcmdn = ajcjbkdk − ajdjbkck
=⇒(~a×~b
)·(~c× ~d
)=(~a · ~c
)(~b · ~d
)−(~a · ~d
)(~b · ~c
)Predtym, nez sa pustıme do kapitoly o diferencialnych identitach, zavedieme oznacenie, ktore mnohokrat
usetrı miesto a rovnice sa budu dat’ pısat’ do jedneho riadku - miesto vyrazu derivacie podl’a i-tej suradnice∂
∂xibudeme pouzıvat’ vyraz ∂i.
8

1.2. PRIKLADY NA VEKTOROVY A DIFERENCIALNY POCET V EINSTEINOVEJ SUMACNEJKONVENCII
1.2.2 Diferencialne operatory
Sem patria vsetky lahodky typu divergencia, gradient a rotacia v roznych kombinaciach nasobnehoaplikovania, kde moznych sposobov je nekonecne vel’a.
~∇ ·(f ~F)
= ∂i (f Fi) = Fi∂if + f∂iFi =⇒ ~∇ ·(f ~F)
= ~F ·(~∇f)
+ f(~∇ · ~F
)~∇ ·(~F × ~G
)= ∂i (εijkFjGk) = εijkGk∂iFj + εijkFj∂iGk = Gkεkij∂iFj − Fjεjik∂iGk
=⇒ ~∇ ·(~F × ~G
)= ~G ·
(~∇× ~F
)− ~F ·
(~∇× ~G
)[~∇ (f g)
]i
= ∂i (f g) = g∂if + f∂ig =⇒ ~∇ (f g) = g ~∇f + f ~∇g[~∇(~F · ~G
)]i
= ∂i (FjGj) = Gj∂iFj + Fj∂iGj
~∇(~F · ~G
)=(~∇~F)· ~G+
(~∇~G)· ~F
Skalarny sucin ,,·” je teraz chapany ako sucin matıc:
(~∇~F)· ~G+
(~∇~G)· ~F =
∂1F1 ∂1F2 ∂1F3
∂2F1 ∂2F2 ∂2F3
∂3F1 ∂3F2 ∂3F3
G1
G2
G3
+
∂1G1 ∂1G2 ∂1G3
∂2G1 ∂2G2 ∂2G3
∂3G1 ∂3G2 ∂3G3
F1
F2
F3
Gradient skalarneho sucinu ma este ine, krajsie vyjadrenie. Jeho dokaz pozostava v rozpısanı oboch
stran a v manualnom overenı pravdivosti tvrdenia (bez dokazu - odvodenie by obsahovalo iste umele kroky):
~∇(~F · ~G
)=(~F · ~∇
)~G+
(~G · ~∇
)~F + ~F ×
(~∇× ~G
)+ ~G×
(~∇× ~F
)[~∇×
(f ~F)]
i= εijk∂j (f Fk) = εijkFk∂jf + εijkf∂jFk = εijkf∂jFk − εikjFk∂jf
=⇒ ~∇×(f ~F)
= f ~∇× ~F − ~F × ~∇f[~∇×
(~F × ~G
)]i
= εijk∂j
(~F × ~G
)k
= εijk∂j (εkmnFmGn) = εijkεmnk (Gn∂jFm + Fm∂jGn) =
= (δimδjn − δinδjm) (Gn∂jFm + Fm∂jGn) = Gj∂jFi︸ ︷︷ ︸[(~G · ~∇
)~F]i
−
[~G(~∇ · ~F
)]i︷ ︸︸ ︷
Gi∂jFj + Fi∂jGj︸ ︷︷ ︸[~F(~∇ · ~G
)]i
−
[(~F · ~∇
)~G]i︷ ︸︸ ︷
Fj∂jGi
=⇒ ~∇×(~F × ~G
)= ~F
(~∇ · ~G
)− ~G
(~∇ · ~F
)+(~G · ~∇
)~F −
(~F · ~∇
)~G
Vyraz(~G · ~∇
)~F chapeme nasledovne:
(~G · ~∇
)~F = Gj∂jFi ~ei =
(G1∂1 +G2∂2 +G3∂3
)~F =
G1∂1F1 +G2∂2F1 +G3∂3F1
G1∂1F2 +G2∂2F2 +G3∂3F2
G1∂1F3 +G2∂2F3 +G3∂3F3
9

1.2. PRIKLADY NA VEKTOROVY A DIFERENCIALNY POCET V EINSTEINOVEJ SUMACNEJKONVENCII
~∇ ·(~∇× ~F
)= ∂i (εijk∂jFk) = εijk∂i∂jFk =
1
2
(εijk∂i∂jFk + εijk∂i∂jFk︸ ︷︷ ︸
εjik∂j∂iFk
)=
=1
2
(εijk∂i∂jFk + εjik
∂i∂jFk︷ ︸︸ ︷∂j∂iFk
)=
1
2∂i∂jFk (εijk − εijk) = 0
~∇ ·(~∇× ~F
)= 0[
~∇×(~∇f)]
i= εijk∂j
(~∇f)k
= εijk∂j∂kfanalogicky
= · · · = 0
~∇×(~∇f)
= 0
~∇ ·(~∇f)
= ∂i (∂if) = ∂i∂if ≡ ~∇2f = ∆f
Operator ∆ volame Laplaceov operator, pust’a sa na skalarnu funkciu alebo na vektorovu funkciu pozlozkach a v kartezskych suradniciach vyzera nasledovne:
∆f = ~∇2f =(∂1, ∂2, ∂3
)∂1
∂2
∂3
f = (∂1∂1 + ∂2∂2 + ∂3∂3) f = ∂1∂1f + ∂2∂2f + ∂3∂3f
[~∇×
(~∇× ~F
)]i
= εijk∂j
(~∇× ~F
)k
= εijk∂j (εkmn∂mFn) = εijkεmnk∂j∂mFn =
= (δimδjn − δinδjm) ∂j∂mFn = ∂i∂jFj − ∂j∂jFi
=⇒ ~∇×(~∇× ~F
)= ~∇
(~∇ · ~F
)−∆~F
∆(~∇ · ~F
)= ∂i∂i∂jFj = ∂j∂i∂iFj =⇒ ∆
(~∇ · ~F
)= ~∇ ·
(∆~F
)~∇ ·(f ~∇g
)= ∂i (f∂ig) = (∂ig) (∂if) + f∂i∂ig =⇒ ~∇ ·
(f ~∇g
)= f∆g + ~∇f · ~∇g
f∆g − g∆f = f∂i∂ig − g∂i∂if = f∂i (∂ig)− g∂i (∂if) =
= ∂i (f∂ig − g∂if)− (∂i) (g∂if) + (∂i) (f∂ig) = ∂i (f∂ig − g∂if)
=⇒ f∆g − g∆f = ~∇ ·(f ~∇g − g~∇f
)∆ (f g) = ∂i∂i (f g) = ∂i [∂i (f g)] = ∂i (g∂if + f∂ig) =
= (∂ig) (∂if) + g∂i∂if + (∂if) (∂ig) + f∂i∂ig
=⇒ ∆ (f g) = f∆g + 2~∇f · ~∇g + g∆f
Tato cast’ sa snazila ukazat’ strucnost’ narabania s Einsteinovou sumacnou konvenciou. Kto by neveril,moze si skusit’ dane vyrazy rozpisovat’ pre jednotlive zlozky a pouzıvat’ sumy. Existuje mnoho d’alsıch identıt,na niektore narazıme pri odvodeniach v mechanike viazanych hmotnych bodov, tuhom telese, mechanikekontinua a hydrodynamike.
10
1.2. PRIKLADY NA VEKTOROVY A DIFERENCIALNY POCET V EINSTEINOVEJ SUMACNEJKONVENCII
V neskorsıch kapitolach budeme hojne vyuzıvat’ dve vety prerabajuce oblast’ integrovania: Gaussovu aStokesovu (popr. Greenovu) vetu.
1.2.3 Gauss-Ostrogradskeho veta*
Nech V ⊂ R3 je uzavreta a ohranicena mnozina, ktora ma po castiach hladku hranicu ∂V ≡ S avektorove pole ~F je spojite diferencovatel’ne. Potom platı veta2:
˚
V
~∇ · ~F dV =
‹
S
~F · d~S (1.24)
Najprv sa pozrime na l’avu stranu; podintegralna funkcia je skalarna a je vysledkom divergencie vek-toroveho pol’a, je teda mozne ju napısat’ ako ∂iFi. Prava strana je uz plosny integral II. druhu, teda nasobımevektorove pole v danom bode s diferencialom plochy, co vsak mozno napısat’ ako:
~F · d~S = ~F · ~ndS
kde ~n je normalovy vektor plochy hranice v danom mieste. Celu Gaussovu vetu mozeme prepısat’ ako:
˚
V
∂iFi dV =
‹
S
FidSi (1.25)
V prıpade pol’a vyssieho radu (tenzoroveho), alebo v prıpade viacerych indexov zmotanych na l’avejstrane (alebo pravej strane, ak zacıname od plosneho integralu) je recept nasledovny: pozri sa, na ktoryindex skace derivacia (napr. i-ty), ked’ ho najdes, zmaz derivaciu a diferencial dV a pripıs prıslusnu zlozkudiferencialu plochy dSi (a integral zmen z objemoveho na plosny).
1.2.4 Kelvin-Stokesova veta*
Nech C (= ∂D) je kladne orientovana, po castiach hladka, jednoducha uzavreta krivka a nech D je
plocha ohranicena touto krivkou a vektorove pole ~F je spojite diferencovatel’ne. Potom platı veta3:
¨
D
(~∇× ~F
)· d~S =
˛
C
~F · d~l (1.26)
Podobnym postupom mozno danu vetu napısat’ v indexoch:
¨
D
εijk∂jFkdSi =
˛
C
Fidli (1.27)
2Divergence theorem3Curl theorem
11

2Mechanika sustavy viazanych hmotnych bodov
Pripomıname, ze vo vsetkych vyrazoch odteraz budeme pouzıvat’ Einsteinovu sumacnu konvenciu - prekazdy index, ktory uvidıme vo vyraze dvakrat (v sucine, naprıklad aibi) si pred nım predstavıme sumu (cize
z aibi by vzniklo:∑Ni=1 aibi = ~a ·~b). V prvych vyrazoch tejto kapitoly pripomenieme sumacnu konvenciu
pridanım sumy do zatvorky, neskor je treba tuto konvenciu spoznat’ automaticky.
2.1 d’Alembertov - Lagrangeov princıp
2.1.1 Vazby, vazbove rovnice
Kazda vazba, ktoru v sebe system ma, je obycajne urcena rovnicou:
Φi
(~r1, ~r2, . . . , ~rn, ~r1, ~r2, . . . , ~rn, t
)= 0 (2.1)
kde Φi
(~r1, ~r2, . . . , ~rn, ~r1, ~r2, . . . , ~rn, t
)je vo vseobecnosti funkcia casu, poloh a rychlostı hmotnych bodov
v sustave, ktoru skumame. Mnozinu bodov, ktore splnaju vazbove rovnice budeme nazyvat’ konfiguracnypriestor M .
Prıklad: Majme v rovine xz (y = 0) jeden hmotny bod hmotnosti m a polohou ~r, ktory je vsak viazanyna kruznicu s polomerom R so stredom v bode [0, 0, 0]. Vieme, ze rovnica takejto kruznice je:
x2 + z2 = R2
Druhe obmedzenie, ktore mame je fakt, ze pohyb sa kona v rovine xz, teda:
y = 0
Vieme, ze vazbove rovnice su tvaru Φi
(~r1, . . . , ~rn, ~r1, . . . , ~rn, t
)= 0, teda nase vazbove rovnice budu
vyzerat’ nasledovne:
Φ1
(~r, ~r, t
)= x2 + z2 −R2 (= 0)
Φ2
(~r, ~r, t
)= y (= 0)
System, ktory sme prave popisovali ma aj meno, oznacuje sa ako rovinne matematicke kyvadlo. Vieme,ze na hmotny bod ~r urcite posobı sila ~F = m~g = m~r. Avsak takyto opis by viedol ku pohybu po parabole,ked’ze v tejto rovnici nie je zohl’adnena prave sila, ktora udrzuje hmotny bod na danej kruznici (vieme, zeby to v skutocnosti bola dostrediva sila).
12

2.1. D’ALEMBERTOV - LAGRANGEOV PRINCIP
2.1.2 Aktıvne sily, reakcne sily vazieb
Zaved’me teraz vo vseobecnosti dve zlozky sily, ktore posobia na body v systeme. Jedna zlozka buduaktıvne sily ~F (a), teda take sily, ktore ostanu prıtomne aj po tom, co by sme si odmysleli vazby (tedapri rovinnom matematickom kyvadle je aktıvna sila jedine gravitacna, pretoze tato sila ostane, aj ked’ bodnebude viazany na kruznicu). Dalej zavedieme reakciu vazieb ~F (r), co su prave sily, ktore udrzuju hmotnebody na trajektoriach urcenych vazbovymi rovnicami. Platı:
~F = ~F (a) + ~F (r) (2.2)
Samotne vazbove rovnice by mali byt’ nezavisle. V praxi to znamena, ze ziadnu skupinu vaziebnemozeme vylucit’ bez toho, aby sme nestratili informaciu o konfiguracnom priestore (v prıklade mate-matickeho kyvadla nemozeme vylucit’ druhu rovnicu y = 0, pretoze takyto pohyb by sa konal na celom valcia nielen na kruznici). Zaroven pripust’ame len ,,slusne” vazby (naprıklad vazba x2 + y2 + z2 (= 0) nie jeslusna, pretoze aj ked’ je len jedna, jej riesenım je jediny bod x = y = z = 0). Presne definovanie tejtozalezitosti by v tomto momente nicomu neprospelo.
2.1.3 Nezavisle vazby, dimenzia konfiguracneho priestoru
Za tychto predpokladov platı, ze dimenziu konfiguracneho priestoru vypocıtame ako rozdiel dimenziepriestoru, v ktorom uvazujeme pohyb hmotnych bodov (pre N hmotnych bodov potrebujeme 3N premennychna ich opis, teda dimenzia tohto priestoru je 3N) a poctu vazbovych rovnıc. Ak mame N hmotnych bodov apocet nezavislych, slusnych vazbovych rovnıc je k, potom dimenziu konfiguracneho priestoru n vypocıtameako:
n = 3N − k (2.3)
Odteraz sa budeme zaoberat’ len vazbami, ktore su holonomne, teda take, ktore zavisia len od ~r a nieod ~r, popr. vyssıch derivacii, alebo explicitne od casu.
Uvazujme teraz vseobecny prıpad, kedy mame N hmotnych bodov ~r1, ~r2, ... az ~rN . Ich hmotnosti sum1, m2, ... az mN . Pre tieto hmotne body platı:
m1~r1 = ~F1
m2~r2 = ~F2...
mN ~rN = ~FN
Polohy ~r1, ~r2, ..., ~rN chapeme ako N bodov v 3D:
~r1 = (x1, y1, z1)~r2 = (x2, y2, z2)
...~rN = (xN , yN , zN )
Definujme jedinu polohu r:
r = (~r1, ~r2, . . . , ~rN ) = (x1, y1, z1, x2, y2, z2, . . . , xN , yN , zN ) (2.4)
Tuto polohu r chapeme ako jeden hmotny bod v 3ND. Teraz jednoducho definujeme konfiguracnypriestor M :
M = r;∀ i : 1 ≤ i ≤ k : Φi (r) = 0 (2.5)
M ⊆ R3N−k
M ⊂ R3N
13

2.1. D’ALEMBERTOV - LAGRANGEOV PRINCIP
Analogicky ku r definujeme rychlost’ v:
v =(~r1, ~r2, . . . , ~rN
)= (x1, y1, z1, x2, y2, z2, . . . , xN , yN , zN ) (2.6)
Hybnost’ p bude:
p = (~p1, . . . , ~pN ) =(m1~r1, . . . ,mN ~rN
)= (m1x1,m1y1,m1z1,m2x2, . . . ,mN yN ,mN zN ) (2.7)
Sila F :
F =(~F1, ~F2, . . . , ~FN
)(2.8)
V tejto pruhovanej konvencii platı zakon sily:
F = ˙p (2.9)
Pre nezavisle vazby Φ1, Φ2, az Φk platı, ze hodnost’ Jacobiho matice Jij (1 ≤ i ≤ k, 1 ≤ j ≤ N):
Jij =∂Φi∂xj
je maximalna mozna, teda h(J) = min (r (J) , s (J)) = min (k, 3N) a to v kazdom bode r, ktory splna tietovazbove rovnice. Pripomıname, ako vyzera Jacobiho matica J :
J =
∂Φ1
∂x1
∂Φ1
∂y1
∂Φ1
∂z1
∂Φ1
∂x2· · · ∂Φ1
∂zN∂Φ2
∂x1
∂Φ2
∂y1
∂Φ2
∂z1
∂Φ2
∂x2· · · ∂Φ2
∂zN...
......
.... . .
...
∂Φk∂x1
∂Φk∂y1
∂Φk∂z1
∂Φk∂x2
· · · ∂Φk∂zN
14

2.1. D’ALEMBERTOV - LAGRANGEOV PRINCIP
2.1.4 Princıp virtualneho posunutia
Predstavme si teraz, ze sa nachadzame v takom bode r, ktory naozaj splna vazbove rovnice, teda patrıdo konfiguracneho priestoru M . Posunme sa do bodu r+ δr, ktory taktiez splna vazbove rovnice, teda platı:
∀ i : 1 ≤ i ≤ k : Φi (r) = Φi (r + δr) = 0 (2.10)
Orientacny obrazok k situacii:
r
r + δr
-
- -
δr-
3N
M
Rozvinme vyraz Φi (r + δr) do Taylorovho radu v okolı bodu r (ked’ze hodnotu δr pokladame za malu):
Φi (r + δr) = Φi (r) +
3N∑j=1
∂Φi∂rj
δrj +O(|δr|2
)kde O
(|δr|2
)je zvysok radu, ktory sa vzhl’adom na malost’ δr menı len malo (a teda je mozne ho zaned-
bat’). Ak operator ∂∂(r)i
oznacıme ako ∇i (1 ≤ i ≤ 3N), potom druhy vyraz v Taylorovom rozvoji bude(∑3Nj=1
) (∇Φi
)jδrj , teda skalarny sucin gradientu i-tej vazbovej funkcie s virtualnym posunutım v 3ND
(zaroven uz zanedbame zvysok radu, ktory sa nemenı do prveho radu zmeny malej hodnoty δr):
Φi (r + δr) = Φi (r) + ∇Φi · δr
Za predpokladu, ze sa naozaj uspokojıme s dvoma clenmi Taylorovho rozvoja, potom clen ∇Φi ·δr musıbyt’ rovny nule, pretoze oba body (r aj r + δr) splnaju vazbove rovnice, teda pouzitım (2.10) musı platit’:
Φi (r) = Φi (r + δr) = 0 =⇒ ∇Φi · δr = 0 (2.11)
15

2.1. D’ALEMBERTOV - LAGRANGEOV PRINCIP
Tento vysledok bude este dolezity. Rozoberme si teraz samotnu reakcnu silu F (r). Na to, aby udrzalabod na konfiguracnom priestore M , musı platit’, ze tato sila bude kolma na dotycnicu ku konfiguracnemupriestoru. V tomto prıpade viac napovie obrazok:
r-
δr-
3N
M
F(r)-
Platı teda, ze skalarny sucin virtualneho posunutia s touto reakcnou silou je nulovy:
F (r) · δr = 0, (2.12)
teda ze skalarny sucin virtualneho posunutia s celkovou silou bude rovny skalarnemu sucinu virtualnehoposunutia s aktıvnou silou, co znamena, ze pracu kona len aktıvna zlozka sily, ktora na bod posobı:
F · δr = F (a) · δr (2.13)
Z (2.9) a (2.13) vyplyva:
˙p · δr = F · δr = F (a) · δr (2.14)
Co mozno prepısat’ ako: (˙p− F (a)
)· δr = 0 (2.15)
16

2.1. D’ALEMBERTOV - LAGRANGEOV PRINCIP
2.1.5 d’Alembertov - Lagrangeov princıp
Z prave odvodenych vysledkov a z vazbovych rovnıc dostavame d’Alembertov - Lagrangeov princıp:
(˙p− F (a)
)· δr = 0
∇Φi (r) · δr = 0
Φi (r) = 0
(2.16)
Vzhl’adom na to, ze index i bezı od 1 do k, d’Alembertov - Lagrangeov princıp zahrna 2k + 1 rovnıc. Totosa ukazuje byt’ vel’mi neefektıvne, ak narasta pocet bodov zaroven s poctom vazbovych rovnıc. Prıkladom bybol opis pohybu tuheho telesa, kde na kazdy novy bod, ktory v telese uvazujeme, musıme uvazovat’ aj vazbovurovnicu ktora povie, ze v prıpade rotacie tento bod rotuje okolo jedinej osi spolu so vsetkymi ostatnymibodmi a d’alsiu vazbovu rovnicu, ktora udrzuje vzdialenosti medzi kazdymi dvoma bodmi. Je jasne, zed’Alembertov - Lagrangeov princıp je v tomto prıpade (a v mnohych inych) len t’azko aplikovatelny - vznikavel’ke mnozstvo d’alsıch rovnıc, ktore v konecnom dosledku davaju opis niecoho, co vobec nepotrebujeme(virtualne posunutia). Na nasledujucom jednoduchom prıklade demonstrujeme neefektıvnost’ tohto princıpu.
Prıklad: rovinne matematicke kyvadlo. V systeme je jediny hmotny bod ~r s hmotnost’ou m viazany nakruznicu so stredom v bode [0, 0, 0] a polomerom l (dlzka kyvadla), ktora lezi v rovine xz, pricom y = 0.Jedina aktıvna sila je gravitacna v smere −z. Toto su vsetky potrebne informacie na vypocet nasledujucichvyrazov potrebnych na zostavenie sustavy rovnıc:
~p = m (x, y, z) =⇒ ~p = m (x, y, z)
~F (a) = (0, 0,−mg)
Φ1 = x2 + z2 − l2
Φ2 = y
~∇Φ1 = (2x, 0, 2z)
~∇Φ2 = (0, 1, 0)
δ~r = (δx, δy, δz)T
Samotna sustava rovnıc:
(2.16 I.) =⇒
(x, y, z + g
)·
δxδyδz
= 0 (a)
(2.16 II.) =⇒
(x, 0, z
)·
δxδyδz
= 0 (b)
(0, 1, 0
)·
δxδyδz
= 0 (c)
(2.16 III.) =⇒
x2 + z2 − l2 = 0 (d)
y = 0 (e)
(2.17)
17

2.1. D’ALEMBERTOV - LAGRANGEOV PRINCIP
Z (2.17 c) vyplyva, ze δy = 0 (pohyb sa kona len v rovine xz, teda sustava nepripust’a virtualne posunutiev smere y). Z (2.17 b) vyplyva xδx + zδz = 0. Ak δy = 0, potom z (2.17 a) vyplyva xδx + (z + g) δz = 0.Maticovy zapis oboch vysledkov naraz je teraz uzitocnejsı:(
x z + gx z
)(δxδz
)=
(00
)Vieme, ze tato rovnost’ ma byt’ splnena vzdy, pre kazde δx a δz, ktore vyhovuju virtualnym posunutiam
v ramci konfiguracneho priestoru M . Potom vsak musı platit’, ze determinant tejto sustavy je rovny nule:∣∣∣∣x z + gx z
∣∣∣∣ != 0
Spolu s prvou vazbovou rovnicou dostavame taketo rovnice:
xz − x (z + g) = 0
x2 + z2 = l2(2.18)
Jednou z moznostı, ako sa dopracovat’ k nejakemu vysledku je vhodne zvolit’ suradnicovu sustavu. Vtomto prıpade zvolıme polarnu sustavu (r, ϕ) taku, ze pre ϕ = 0 dostaneme vol’ne visiace kyvadlo. Ked’ze
kyvadlo ma konstantnu dlzku, tak r = l a mozeme pısat’:xyz
=
l sin(ϕ)0
−l cos(ϕ)
Vidıme, ze pri takto zvolenych suradniciach su automaticky splnene obe vazbove rovnice. Vypocıtajme
x a z:
x = l sin(ϕ)
x = l cos(ϕ)ϕ
x = −l sin(ϕ)ϕ2 + l cos(ϕ)ϕ
z = −l cos(ϕ)
z = l sin(ϕ)ϕ
z = l cos(ϕ)ϕ2 + l sin(ϕ)ϕ
Z rovnice (2.18 I.) (rovnica (2.18 II.) je splnena automaticky) teda dostavame:[−l sin(ϕ)ϕ2 + l cos(ϕ)ϕ
][−l cos(ϕ)]− l sin(ϕ)
[l cos(ϕ)ϕ2 + l sin(ϕ)ϕ+ g
]= 0
−l2ϕ[cos2(ϕ) + sin2(ϕ)
]− lg sin(ϕ) = 0
ϕ+g
lsin(ϕ) = 0
Toto je naozaj spravna rovnica rovinneho matematickeho kyvadla. Vidıme, ze pocas jej odvodenia smemuseli pouzit’ rozne kroky a postupy, ktore sa nedaju univerzalne algoritmicky opısat’, avsak vo vysledkudostavame rovnicu pre jedinu premennu ϕ. Intuıcia nam teda vravı, ze z piatich rovnıc by stacila jedna (vovhodnej kombinacii), aby sme sa dopracovali k rovnakemu vysledku. Kl’ucovy rozdiel medzi piatimi rovnicamid’Alembertovho - Lagrangeovho princıpu a jedinou vyslednou rovnicou je, ze zatial’ co povodne sme dovol’ovalivirtualnym posunutiam ıst’ v ktoromkol’vek smere a jeho spravnost’ urcili az samotne rovnice, v priebehuvypoctu sme zistili, ze existuju suradnice (parametrizacia), ktore su akoby ,,site na mieru” a poskytujuprave tol’ko vol’nosti, kol’ko je v systeme treba, teda pre ziaden uhol ϕ sa nedostaneme mimo kruznice,na ktorej sa deje pohyb, no zaroven rozumnym sposobom opıse celu kruznicu. Za pomoci zovseobecneniamyslienky suradnıc usitych na mieru vazbovym rovniciam odvodıme Lagrangeove rovnice, ktorych pocet jerovny poctu stupnov vol’nosti systemu.
18

2.2. LAGRANGEOVE ROVNICE II. DRUHU
2.2 Lagrangeove rovnice II. druhu
2.2.1 Zovseobecnene suradnice, Lagrangeove rovnice II. druhu
Ako sme uz naznacili, casto platı, ze pre nas system existuju take suradnice, ktore su pren ako site namieru, pre matematicke kyvadlo to bol naprıklad uhol ϕ. Predpokladajme, ze taka parametrizacia existuje,teda existuje n suradnıc q takych, ze automaticky platı:
Φi (r) = Φi (r(q)) = 0,∀i; 1 ≤ i ≤ n,
teda rovnica (2.16 III.) je automaticky splnena (definitoricky). Pomocou Taylorovho rozvoja pocıtajme δr:
δr = r (q1 + δq1, q2 + δq2, . . . , qn + δqn)− r (q1, q2, . . . , qn) =
= r (q1, q2, . . . , qn) + δq1∂r
∂q1+ δq2
∂r
∂q2+ · · ·+ δqn
∂r
∂qn− r (q1, q2, . . . , qn) =
(n∑i=1
)δqi
∂r
∂qi
Spocıtajme teraz vyraz v (2.16 II.) pre a-tu vazbovu funkciu:( 3N∑i=1
)∂Φa∂ri
δri =
( n∑j,k=1
)∂Φa∂qj
( 3N∑i=1
)∂qj∂ri
∂ri∂qk︸ ︷︷ ︸
=δjk
δqk =
( n∑j=1
)∂Φa∂qj
δqj!= 0
Vieme, ze pre akekol’vek q je kazda vazbova rovnica rovna nule (pretoze q parametrizuju kofiguracnypriestor tak, aby to platilo), co ale znamena, ze vzhl’adom na zovseobecnene suradnice q je kazda vazbova
rovnica konstantou (konkretne rovnou nule), co sa inak da napısat’ tak, ze∂Φa∂qj
= 0, teda vyraz vyssie je
identicky rovne nule. To ale znamena, ze rovnica (2.16 II.) taktiez bez namahy automaticky platı a ostavauz len rovnica (2.16 I.):
(˙p− F (a)
)· δr =
n∑i=1
3N∑j=1
( ˙pj − F (a)j
) ∂rj∂qi
δqi = 0
Vieme, ze tato rovnost’ platı pre kazdy vektor δq. Potom neostava nic ine, len ze zvysok musı byt’ rovnynule (ak je skalarny sucin x · y rovny nule pre kazde x, potom platı, ze y = 0):
∀ δq :(
˙pj − F (a)j
) ∂rj∂qi
δqi = 0 =⇒ ∀ i; 1 ≤ i ≤ n :(
˙pj − F (a)j
) ∂rj∂qi
= 0
19

2.2. LAGRANGEOVE ROVNICE II. DRUHU
Roznasobme zatvorku a vyraz s aktıvnymi silami presunme na druhu stranu. Oznacme tento vyraz akoQi(q) - zovseobecnene sily:
∂rj∂qi
˙pj =
3N∑j=1
F(a)j
∂rj∂qi︸ ︷︷ ︸
Qi(q)
(2.19)
Prava strana je tym vybavena, v l’avej si vsimneme, ze prvy sucinitel’ je nederivovany podl’a casu,kym druhy je, co sa da prepısat’ ako casova derivacia sucinu dvoch funkciı, od ktorej odpocıtame opacnukombinaciu derivovania podl’a casu1:
∂rj∂qi
˙pj =d
dt
(∂rj∂qi
pj
)− pj
d
dt
(∂rj∂qi
)Vyraz:
∂rj∂qi
pj (2.20)
ma fyzikalny rozmer: [∂rj∂qi
pj
]=Js
[qi]=
J
[qi].
Vyraz:
d
dt
(∂rj∂qi
)pj (2.21)
Ma rozmer: [d
dt
(∂rj∂qi
)pj
]=
J
[qi].
Intuıcia nam vravı, ze ak ma nieco jednotku Joule na jednotku i-tej zovseobecnenej suradnice, jednaz moznostı je, ze vyraz je parcialnou derivaciou energie podl’a zovseobecnenej suradnice. Ked’ze vyrazy nal’avej strane sa skladaju z poloh a aj z hybnostı, je pravdepodobne, ze pojde o kineticku energiu sustavy (ktomuto tuseniu prispieva aj fakt, ze aktıvne sily sme presunuli na pravu stranu - potencialna energia by samohla skryvat’ iba v aktıvnych silach). Najdime teda kineticku energiu sustavy:
Ekin =1
2
N∑k=1
mk~v2k =
1
2
N∑k=1
mk∂~rk∂qa· ∂~rk∂qb
qaqb
Najdime∂Ekin∂qi
:
∂Ekin∂qi
=1
2
N∑k=1
mk∂~rk∂qa· ∂~rk∂qb
(δiaqb + qaδib) =1
2
N∑k=1
[mk
∂~rk∂qi· ∂~rk∂qb
qb +mk∂~rk∂qa· ∂~rk∂qi
qa
]=
=
N∑k=1
mk∂~rk∂qi· ∂~rk∂qb
qb =
N∑k=1
mk~rk ·∂~rk∂qi
=
N∑k=1
~pk ·∂~rk∂qi
=
3N∑j=1
pj∂rj∂qi
=∂rj∂qi
pj
Vidıme, ze vyraz, ktory sme dostali, zodpoveda vyrazu (2.20).
1Odteraz uz neuvadzame pomocne sumy, pre spravne rozpısanie vyrazov s dvoma zhodnymi indexami stacı pouzit’ Ein-steinovu sumacnu konvenciu (a danu sumu si tam domysliet’). Namiesto parcialnej derivacie podl’a casu pouzijeme vyraz ∂tf ,pre derivaciu podl’a i-tej kartezskej suradnice pouzijeme ∂if .
20

2.2. LAGRANGEOVE ROVNICE II. DRUHU
Spocıtajme∂Ekin∂qi
:
∂Ek∂qi
=1
2
N∑k=1
mk
(∂2~rk∂qa∂qi
· ∂~rk∂qb
+∂~rk∂qa· ∂
2~rk∂qb∂qi
)qaqb =
=1
2
N∑k=1
mk
[∂
∂qi
(∂~rk∂qa
)qa︸ ︷︷ ︸
∂
∂qi
(∂~rk∂qa
qa
)∂~rk∂qb
qb︸ ︷︷ ︸~rk
+∂
∂qi
(∂~rk∂qb
)qb︸ ︷︷ ︸
∂
∂qi
(∂~rk∂qb
qb
)∂~rk∂qa
qa︸ ︷︷ ︸~rk
]=
=
N∑k=1
mk~rk ·∂
∂qi
(∂~rk∂qa
qa
)=
N∑k=1
~pk ·∂~rk∂qi
=
N∑k=1
~pk ·d
dt
(∂~rk∂qi
)=
3N∑j=1
pjd
dt
(∂rj∂qi
)=
d
dt
(∂rj∂qi
)pj
Dostali sme vyraz zhodny s (2.21).Z (2.19) a predoslych vypoctov vyplyva nasledujuca rovnost’:
d
dt
(∂T
∂qi
)− ∂T
∂qi= Qi(q) (2.22)
kde T sme oznacili celkovu kineticku energiu sustavy.Vel’mi dolezita poznamka: tento vzt’ah platı len vtedy, ak pouzijeme predpoklad, ze parcialna derivacia
q podl’a q je nulova, teda tieto veliciny na sebe nezavisia (mozu sa menit’ nezavisle od seba). V odvodenı
(2.22) sme tento fakt skryto predpokladali (z toho vyplyva, ze ani q nezavisı ~r a tak d’alej, vsetky kombinacievyrazov, kde jeden je bodkovany a druhy nie je). Tento predpoklad sa zda byt’ vzhl’adom na situaciu trochuzvlastny, pretoze clovek sa zamyslı a povie si - ved’ pockaj, vsak ked’ menım funkciu polohy, potom aj funkciarychlosti sa musı menit’! To je sıce pravda, lenze po prve fakt, ze ∂q
∂q = 0 mozeme brat’ ako postulat, za
ktoreho pravdivosti platı aj (2.22) a po druhe, vsetky funkcie, v ktorych vystupuje q aj q mozeme chapat’
ako funkciu dvoch okienok (plus d’alsie okienko za cas): f (q, q) ↔ f (, ). Jej derivacia podl’a niektorehookienka teda nesuvisı s inymi okienkami a opacne. Niekoho by mohlo pri zavislosti q od q napadnut’ vytvarat’
nezmyselne ret’azce vzajomnych parcialnych derivacii:
∂f [q (q, t) , q (q, t) , t (q, q)]
∂q=∂f
∂q+∂f
∂q
∂q
∂q+∂f
∂t
∂t
∂q
Tento prıstup vsak pripomına skor totalnu derivaciu, preto sa dohodneme, ze v prıpade parcialnejderivacie si budeme vsımat’ jedine explicitne zavislosti a derivacie budeme vykonavat’ slepo podl’a okienok:
f[qHHH(q, t) , q
HHH(q, t) , tHHH(q, q)]
= f (q, q, t)↔ f (, , ?) · · · ∂f
∂q=∂f
∂ ,
∂f
∂q=∂f
∂ ,
∂f
∂t=∂f
∂ ?
Koniec-koncov, vyzadovat’ od parcialnej derivacie, aby menila len tu svoju premennu nie je az takezvlastne, na totalne zmeny boli vymyslene totalne derivacie. Na tento princıp musıme pamatat’ aj privsetkych nasledujucich odvodeniach, teda akekol’vek parcialne derivovanie podl’a niektorej z premennychbude ignorovat’ ostatne premenne, pokial’ nie je prıtomna explicitna zavislost’. Prıklad explicitnej zavislosti:
f [q, q, t] = sin(q)− q2 + qt;∂f
∂q= cos(q) + t,
∂f
∂q= −2q,
∂f
∂t= q
Prıpad implicitnej zavislosti. Pri totalnej derivacii najprv zderivujeme funkciu podl’a okienok (ignoru-jeme ostatne okienka) a zderivujeme okienko podl’a casu (pridame nad okienko bodku a pamatame, ze t = 1):
f [q, q, t] = eq(t) + q(t) =⇒ f[q, q, Ct
]=⇒ ∂f
∂t= 0,
df
dt=∂f
∂q
dq
dt+∂f
∂q
dq
dt+SSS
∂f
∂t=∂f
∂qq +
∂f
∂qq = eqq + q
21

2.2. LAGRANGEOVE ROVNICE II. DRUHU
Pocas odvodenia sme dosli k uzitocnemu postupu, ako sa da vypocitat’ kineticka energia sustavy, pokial’
mame zadanu parametrizaciu q:
T =1
2
N∑k=1
mk∂~rk∂qi· ∂~rk∂qj︸ ︷︷ ︸
Tij
qiqj =1
2
(q1, q2, . . . , qn
)T11 T12 · · · T1n
T21 T22 · · · T2n
......
. . ....
Tn1 Tn2 · · · Tnn
q1
q2
...qn
Tij =
N∑k=1
mk∂~rk∂qi· ∂~rk∂qj
(2.23)
Podstatnou myslienkou d’alsıch odvodenı je, ze castokrat platı, ze sila F (a) je potencialova. Nutnou ajpostacujucou podmienkou potencialovosti sily F (a) je2:
∀~r ∈ E3 :∂ ~Fi∂xj
=∂ ~Fj∂xi⇔ ∃U : ~F = ~∇U
Potom sa zovseobecnena sila da napısat’ pomocou gradientu nejakej funkcie U(q) - potencialnej energie:(∂F
(a)i
∂xj=∂F
(a)j
∂xi
)⇔(F (a) = −∇U
)Detaily tohto vypoctu budeme prezentovat’ v prıkladoch, ktore sa v texte vyskytnu. Pre zovseobecnene
sily Qi(q) mozeme pısat’:
Qi(q) = F (a) · ∂r∂qi
= −∇U · ∂r∂qi
= − ∂U∂rj
∂rj∂qi
= −∂U∂qi
Pouzitım tohto vysledku z (2.22) dostavame:
d
dt
(∂T
∂qi
)− ∂T
∂qi= Qi(q)
d
dt
(∂T
∂qi
)− ∂T
∂qi= −∂U
∂qi
d
dt
(∂T
∂qi
)− ∂(T − U)
∂qi= 0
Predpokladame, ze potencialna energia U nezavisı od inych parametrov, ako su zovseobecnene suradnice.
Potom platı∂U
∂qi= 0 a mozeme pısat’:
d
dt
(∂(T − U)
∂qi
)− ∂(T − U)
∂qi= 0
Ak teraz zavedieme funkciu zvanu Lagrangian L = T −U , teda rozdiel kinetickej a potencialnej energiesustavy, tak dostavame vysledne Lagrangeove rovnice II. druhu:
d
dt
(∂L
∂qi
)− ∂L
∂qi= 0 (2.24)
2Toto platı len pre sily a k nim prisluchajuce potencialy, ktore v sebe obsahuju len suradnice v Euklidovskom priestore, ktoryoznacujeme E3. Sily, ktore v sebe obsahuju aj cas a poprıpade vyssie derivacie poloh, mozu mat’ zovseobecnenu potencialnuenergiu, ale nebude to tak vzdy. Ak by sme totiz aj silu zavislu od rychlostı pocıtali len ako Fi = −∂iU , dostali by sme, zetrecia sila Fi = −kxi by mala mat’ potencial U = kxixi, co vsak nie je pravda, ako uvidıme neskor.
22

2.2. LAGRANGEOVE ROVNICE II. DRUHU
Prıklad: dvojne rovinne matematicke kyvadlo. Takyto system sa sklada z dvoch hmotnych bodov vrovine xz (y = 0). Prvy hmotny bod ~r1 hmotnosti m1 je zaveseny na nehmotnej palicke (pociatok v [0, 0, 0])
dlzky l1. Na nom je zavesena druha nehmotna palicka dlzky l2, na ktorej konci je umiestneny druhy hmotnybod ~r2 hmotnosti m2. Na cely system posobı homogenne tiazove pole v smere −z. Nakres:
x
yz
1
2
l1
l2
m ,r1 1
m 2 2
→
→
g→,r
Na opısanie kazdeho stavu tohto systemu su potrebne len dva parametre - uhly ϕ1 a ϕ2. Parametrizaciaprveho hmotneho bodu je jednoducha:
~r1 =
l1 sin(ϕ1)0
−l1 cos(ϕ1)
Polohu druheho hmotneho bodu opıseme takmer rovnako, akurat stred druhej kruznice (s polomerom
l2) nebude v [0, 0, 0], ale tam, kde lezı polohovy vektor ~r1:
~r2 = ~r1 +
l2 sin(ϕ2)0
−l2 cos(ϕ2)
=
l1 sin(ϕ1) + l2 sin(ϕ2)0
−l1 cos(ϕ1)− l2 cos(ϕ2)
Na vypocet kinetickej energie potrebujeme poznat’ rychlosti oboch bodov:
~v1 = ~r1 =
l1 cos(ϕ1)ϕ1
0l1 sin(ϕ1)ϕ1
= ϕ1l1
cos(ϕ1)0
sin(ϕ1)
~v2 = ~r2 =
l1 cos(ϕ1)ϕ1 + l2 cos(ϕ2)ϕ2
0l1 sin(ϕ1)ϕ1 + l2 sin(ϕ2)ϕ2
Kineticka energia sustavy:
T =1
2m1~v
21 +
1
2m2~v
22 =
=1
2m1ϕ
21l
21 +
1
2m2ϕ
21l
21 +m2ϕ1ϕ2l1l2 cos(ϕ2 − ϕ1) +
1
2m2ϕ
22l
22
23

2.2. LAGRANGEOVE ROVNICE II. DRUHU
T =1
2
(ϕ1 ϕ2
)( m1l21 +m2l
22 m2l1l2 cos (ϕ2 − ϕ1)
m2l1l2 cos (ϕ2 − ϕ1) m2l22
)(ϕ1
ϕ2
)Potencialnu energiu spocıtame ako sucet jednotlivych potencialnych energiı oboch bodov, m1gh1 +m2gh2,
kde h1 a h2 su vysky bodov ~r1 a ~r2 oproti pociatku [0, 0, 0]:
U = m1gh1 +m2gh2 = −m1gl1 cos(ϕ1)−m2g [l1 cos(ϕ1) + l2 cos(ϕ2)]
Lagrangian L tejto sustavy bude:
L = T − U
=1
2
(ϕ1 ϕ2
)( m1l21 +m2l
22 m2l1l2 cos (ϕ2 − ϕ1)
m2l1l2 cos (ϕ2 − ϕ1) m2l22
)(ϕ1
ϕ2
)+m1gl1 cos(ϕ1) +m2g [l1 cos(ϕ1) + l2 cos(ϕ2)]
Vyslednym produktom budu dve Lagrangeove rovnice, kazda za jeden stupen vol’nosti.
d
dt
(∂L
∂ϕ1
)− ∂L
∂ϕ1= 0
d
dt
(∂L
∂ϕ2
)− ∂L
∂ϕ2= 0
Ich vysledny tvar nebudeme kvoli ich zlozitosti uvadzat’ (nie je vsak t’azke ich zıskat’, ak ma clovekdostatok miesta). Vo vysledku je to sustava dvoch nelinearnych diferencialnych rovnıc druheho radu, ktoresamozrejme nie je mozne riesit’ analyticky a ktore vykazuju silne chaoticke spravanie (teda ich casovy vyvojpohybu vel’mi citlivo zavisı od pociatocnych podmienok). Moze sa zdat’, ze sme si vyjadrenım pohybovychrovnıc tejto sustavy nijako nepomohli, faktom vsak ostava, ze bez aparatu Lagrangeovych rovnıc by bolosamotne vyjadrenie vel’mi obtiazne. Vo fyzike sa za dolezity medzivysledok povazuje uz len samotne napısaniepohybovych rovnıc, ich analyticke riesenie castokrat nie je mozne. Co sa tyka nejakej casti analytickehoriesenia, obcas vieme uhadnut’, co by system mal robit’ za urcitych podmienok - naprıklad vieme, ze dvojnerovinne matematicke kyvadlo vie pokojne stat’, ak ho nebudeme drazdit’, v tom prıpade ϕ1 = ϕ2 = 0.Tuto podmienku samozrejme vysledne rovnice urcite splnaju, no takyto pohyb je znacne trivialny. Podobne,,tipy”, ktore chceme preverit’ analytickym vypoctom sa nazyvaju ,,ansatz” (an educated guess - kvalifikovanyodhad), teda uhadneme cast’ riesenia, dosadıme ho do pohybovych rovnıc, z ktorych nam potencionalne estemoze vyjst’ nejaka podmienka na parametre, ktore si v ansatzi urcıme. Ako prıklad na tento princıp dobreposluzi sfericke matematicke kyvadlo.
24
2.2. LAGRANGEOVE ROVNICE II. DRUHU
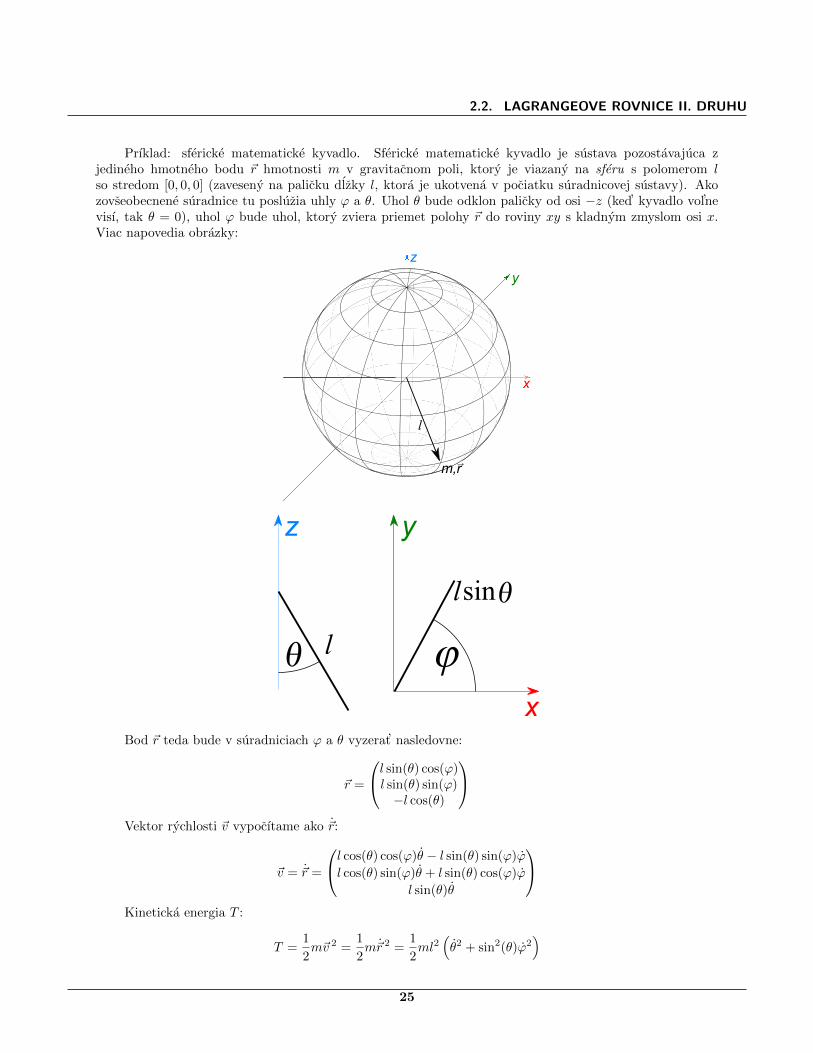
Prıklad: sfericke matematicke kyvadlo. Sfericke matematicke kyvadlo je sustava pozostavajuca zjedineho hmotneho bodu ~r hmotnosti m v gravitacnom poli, ktory je viazany na sferu s polomerom lso stredom [0, 0, 0] (zaveseny na palicku dlzky l, ktora je ukotvena v pociatku suradnicovej sustavy). Akozovseobecnene suradnice tu posluzia uhly ϕ a θ. Uhol θ bude odklon palicky od osi −z (ked’ kyvadlo vol’nevisı, tak θ = 0), uhol ϕ bude uhol, ktory zviera priemet polohy ~r do roviny xy s kladnym zmyslom osi x.Viac napovedia obrazky:
x
y
z
l
m,r→
z
θ l
x
y
lsinθ
Bod ~r teda bude v suradniciach ϕ a θ vyzerat’ nasledovne:
~r =
l sin(θ) cos(ϕ)l sin(θ) sin(ϕ)−l cos(θ)
Vektor rychlosti ~v vypocıtame ako ~r:
~v = ~r =
l cos(θ) cos(ϕ)θ − l sin(θ) sin(ϕ)ϕ
l cos(θ) sin(ϕ)θ + l sin(θ) cos(ϕ)ϕ
l sin(θ)θ
Kineticka energia T :
T =1
2m~v 2 =
1
2m~r 2 =
1
2ml2
(θ2 + sin2(θ)ϕ2
)
25

2.2. LAGRANGEOVE ROVNICE II. DRUHU
Potencialna energia U :
U = mgh = −mgl cos(θ)
Lagrangian sustavy bude:
L = T − U =1
2ml2
(θ2 + sin2(θ)ϕ2
)+mgl cos(θ)
Rovnica pre suradnicu θ:
d
dt
(∂L
∂θ
)− ∂L
∂θ= 0
θ − 1
2sin(2θ)ϕ2 +
g
lsin(θ) = 0
Rovnica pre suradnicu ϕ:
d
dt
(∂L
∂ϕ
)− ∂L
∂ϕ= 0
sin(2θ)θϕ+ sin2(θ)ϕ = 0
Tieto rovnice predstavuju znova sustavu nelinearnych diferencialnych rovnıc druheho radu, ktore sanedaju riesit’ analyticky, ale mozeme skumat’ konkretny ansatz, ktory nas zaujıma. Zaujımave by naprıkladbolo zistit’, ci existuje riesenie v tvare θ = θ0 = konst., ϕ = ωt. Ansatz sa overuje dosadenım do vsetkychrovnıc, ktore mame k dispozıcii (nie do Lagrangianu!). Dalsie upravy ukazu, ci je system schopny konat’
taky druh pohybu, poprıpade aj dostaneme podmienku, ake musia byt’ parametre, aby taky pohyb sustavamohla vykonavat’ (pri tomto ansatzi sme blizsie nespecifikovali, kol’ko presne je ω a θ0, takze ocakavame, zenam tuto informaciu rovnice laskavo podaju). Dosadenım dostaneme tieto rovnice:
− sin(θ0) cos(θ0)ω2 +g
lsin(θ0) = 0
0 = 0
Z druhej rovnice sme sa takto nic nedozvedeli, platı automaticky, co znamena, ze druha rovnica aninepozaduje nejake specialne podmienky ohl’adom ω a θ0 - je splnena automaticky pre kazdy pohyb, ktoryma konstantne θ a casovo linearne premenne ϕ. Predpokladajme, ze θ0 nie je ani 0, ani π, zaroven nech maj l su kladne. Potom prva rovnica hovorı nasledovne:
g = l cos(θ0)ω2 =⇒ ω2 =g
l cos(θ0)
Co sme to vlastne dostali? Skumali sme, ci dokaze daketo kyvadlo konat’ ustaleny pohyb po kruzniciv istej vyske nad rovnovaznou polohou tak, ze θ ostava konstantna a ϕ s casom linearne narasta (bod saotaca dookola rovnomerne). Zistili sme, ze takyto pohyb je mozny a navyse sme dostali aj podmienku, kedyje tato rovnovaha splnena. Jednak system moze takyto pohyb konat’ len ak 0 < θ0 <
π2 (aby ω bola realna
konstanta), zaroven sme aj dostali presny vzt’ah medzi θ0 a ω (ak l a g su dane). Navyse sme zistili, ze tentovzt’ah neobsahuje hmotnost’ m, co znamena, ze hmotnost’ bodu na palicke nema vplyv na takyto rovnomernypohyb po kruznici. Dalsiu vec, ktoru vidıme zo vzt’ahu pre θ0 a ω je, ze ked’ sa θ0 blızi ku π
2 , ω musı narastat’
nad vsetky medze do nekonecna, aby mohla taka rovnovaha nastat’. Toto ale uplne vystihuje nasu intuitıvnupredstavu o takomto druhu pohybu - kazdy, kto sa uz snazil roztocit’ gulicku na snurke si musel vsimnut’, zecım rychlejsie tocı snurkou, tym vyssie sa dvihne gulicka, no nikdy nedosiahne do takej vysky, aby snurkakmitala v jednej rovine.
26

2.2. LAGRANGEOVE ROVNICE II. DRUHU
Dalsı zaujımavy ansatz tohto problemu je prıpad, kedy ϕ = ϕ0 = konst., pricom na θ nenakladamenijaku podmienku, teda nemozeme predpokladat’, ze by nejaka (a tym padom aj vsetky d’alsie) casovaderivacia θ bola nulova. Vtedy z pohybovych rovnıc dostaneme:
θ +g
lsin(θ) = 0
0 = 0
Ako vidıme, druhu rovnicu nas ansatz znovu vobec nezaujıma - je pravdiva. Prva rovnica je vlastnerovnica rovinneho matematickeho kyvadla. Naozaj, pri konstruovanı tohto ansatzu sme mali na mysli prıpad,kedy sa kyvadlo, napriek tomu, ze je sfericke, bude kyvat’ len v jednej rovine, preto ϕ = ϕ0. Na θ smenekladli ziadnu podmienku (t.j. system si mohol robit’ co uznal za vhodne v medziach konstantneho ϕ) asystem si povedal, ze najvseobecnejsı pohyb, aky bude θ robit’, je pohyb rovinneho matematickeho kyvadla.Tuto rovnicu je mozne analyticky riesit’ pomocou eliptickeho integralu prveho druhu (dostaneme zavislost’
t(θ)) a Jacobiho amplitudnej funkcie am (dostaneme zavislost’ θ(t)). Tento system, narozdiel od linearnehoharmonickeho oscilatora ma viac moznostı ako sa spravat’ v zavislosti od energie, ktoru mu na zaciatkuudelıme. Ak ma malo energie, bude kmitat’ v okolı rovnovaznej polohy (vtedy sa zvykne pısat’ sin(θ) ≈ θ)a jeho casovy vyvoj bude takmer zhodny s linearnym harmonickym oscilatorom (aspon prvych par period).Ak mu udelıme presne tol’ko energie, aby vladal vystupit’ do rovnovaznej polohy navrchu gule (vtedy celkovaenergia T + U bude rovna potencialnej energii U v bode navrchu gule), casovy vyvoj θ bude uhol, ktory sabude exponencialne pomaly blızit’ k hodnote π, no teoreticky sa do tejto polohy nikdy nedostane. Dalsoumoznost’ou je prıpad, kedy je energia o nieco (nie ovel’a) vyssia ako energia potrebna na vystupanie do vratkejrovnovaznej polohy - vtedy bude bod obiehat’ kruznicu nerovnomernou uhlovou rychlost’ou, teda θ bude rast’,ale nie linearne (pohyb je periodicky, avsak θ uz nie je periodicka funkcia casu). Ak bude energia ovel’a vacsiaako energia potrebna na vystupanie do vratkej rovnovaznej polohy, potom tento pohyb bude znovu pohybpo kruznici, avsak θ bude takmer linearne rastuca funkcia casu - kyvadlo si skoro ani nevsimne, ze sa munejako menı potencialna energia, pretoze tato bude zanedbatel’na oproti kinetickej (vtedy platı, ze T U ,teda E = T +U ≈ T ). Vsetky tieto prıpady su zahrnute v specialnych Jacobiho funkciach, teda pri urcitychhodnotach energie, alebo pri konkretnych zanedbaniach sa tieto prıpady daju najst’ vo vyslednom casovomvyvoji θ, no ak aj tieto funkcie nepozname, tieto prıpady sa daju overit’ ansatzmi.
Jednu z hlavnych vyhod Lagrangeovych rovnıc sme uz nacrtli - je nou samotny pocet rovnıc, ktory jepresne taky, aky je pocet stupnov vol’nosti v systeme. Dalsou nespornou vyhodou je, ze z Lagrangianu sadaju priamo odcıtat’ zakony zachovania (ktore mozu znacne ul’ahcit’ rozbor vyslednych rovnıc).
27

2.2. LAGRANGEOVE ROVNICE II. DRUHU
2.2.2 Zakony zachovania
Zakony zachovania 3 su nespornou vyhodou konstrukcie lagrangianu a rovnıc, ktore z neho vyplyvaju.Lagrangian je vo vseobecnosti funkcia zovseobecnenych suradnıc, zovseobecnych rychlostı a casu. Takusuradnicu, ktora nebude vstupovat’ do Lagrangianu explicitne (t.j. ked’ napıseme Lagrangian a jednopısmenko, ktore by v nom mohlo byt’, v nom nie je) budeme nazyvat’ cyklickou. Platı teda:
L (q1, . . . , qn, q1, . . . , qn, t) = L (q1, . . . ,qi , . . . , qn, q1, . . . , qn, t) =⇒ ∂L
∂qi= 0 =⇒ qi je cyklicka suradnica
Odvod’me si, aky to ma vlastne vyznam, napısme teda pohybovu rovnicu pre i-tu zovseobecnenusuradnicu qi:
d
dt
∂L
∂qi= 0
Vyrok, ktory dostavame tvrdı, ze totalna casova derivacia vyrazu∂L
∂qije rovna nule. To ale znamena,
ze samotny vyraz je casovo nepremenny, teda konstantny:
d
dt
∂L
∂qi= 0 =⇒ ∂L
∂qi= konst.
Vyraz∂L
∂qibudeme nazyvat’ zovseobecnena hybnost’ pi, ktorej vyznam pochopıme hlbsie az neskor,
pri Hamiltonovych rovniciach - zatial’ nam stacı, ze ak i-ta zovseobecnena poloha je cyklicka, potom i-tazovseobecnena hybnost’ pi, sa v case zachovava. Ked’ze potencialna energia nezvykne obsahovat’ rychlost’,tato parcialna derivacia sa vzt’ahuje zrejme na kineticku energiu. Zaujıma nas teda vyraz:
∂L
∂qi
(∂U∂qi
=0)
=∂T
∂qi
Z odvodenı vieme, comu je rovna kineticka energia, pocıtame teda vyraz:
∂T
∂qi=
∂
∂qi
(1
2Tabqaqb
)=
1
2Tab (δiaqb + qaδib) =
1
2Tibqb +
1
2Taiqa =
1
2Tbiqb +
1
2Taiqa = Taiqa
V poslednom kroku sme vyuzili, ze matica Tab je symetricka, co vidno z definıcie (2.23), teda Tab = Tba.Este sme nespomenuli, co to znamena, ak nahodou do Lagrangianu nevstupuje zovseobecnena rychlost’
qi. Overme si, co sa v tom prıpade stane:
∂L
∂qi= 0
Za tejto podmienky sa z pohybovej rovnice vykl’uje:
@@@
d
dt
∂L
∂qi− ∂L
∂qi= 0
∂L
∂qi= 0
To ale znamena, ze ani zovseobecnena suradnica qi nesmie vystupovat’ v Lagrangiane explicitne. Ak sateda v lagrangiane nachadza zovseobecnena suradnica qi a zovseobecnena rychlost’ qi sa v nom nenachadza,nieco je zle.
3Mimochodom, miesto pojmu ,,zachovavajuca sa velicina” (conserved quantity) sa obcas pouzıva vyraz ,,integral pohybu”(integral of motion).
28

2.2. LAGRANGEOVE ROVNICE II. DRUHU
2.2.3 Zakon zachovania energie
Nerozobrali sme poslednu moznost’, ktora nam ostala - cyklicnost’ casu t, teda fakt, ze cas t explicitnenevystupuje v Lagrangiane. Tieto odvodenia su platne len pre potencialne energie, v ktorych nevystupujeexplicitne ziadna zovseobecnena rychlost’. Za tychto predpokladov platı:
∂L
∂t= 0 ∧ ∂U
∂qi= 0
Pozrieme sa na to, aky to ma pre nas dosledok. Pocıtajme totalnu casovu derivaciu:
dL
dt= L =
∂L
∂qiqi +
∂L
∂qiqi +
SSS
∂L
∂t
Z Lagrangeovej rovnice pre i-tu suradnicu vieme:
∂L
∂qi=
d
dt
∂L
∂qi
Mozeme teda pısat’:
L =∂L
∂qiqi +
d
dt
(∂L
∂qi
)qi
Na pravej strane spozname totalnu derivaciu:
d
dt
(∂L
∂qiqi
)=∂L
∂qiqi +
d
dt
(∂L
∂qi
)qi
Teda L bude:
L =d
dt
(∂L
∂qiqi
)(2.25)
Rozoberme vyraz ∂L∂qiqi:
∂L
∂qiqi =
1
2Tab
∂
∂qi(qaqb) qi =
1
2Tab (δiaqb + qaδib) qi =
1
2Tabqbqa +
1
2Tabqaqb = Tabqaqb = 2T
Potom z (2.25) dostaneme:
L =d
dt(2T ) = 2T =⇒ 2T − L = 2T −
(T − U
)= T + U = E = 0
∂L
∂t= 0 =⇒ E = 0 =⇒ E = konst. (2.26)
teda vyslo nam tvrdenie, ze ak cas explicitne nevstupuje do Lagrangianu, potom sa energia v case zachovava.
29
2.3. PRINCIP NAJMENSIEHO UCINKU
2.3 Princıp najmensieho ucinku
2.3.1 Matematicke okienko do variacneho poctu
Cokol’vek, co funkcii f(x) priradı cıslo s(f) budeme volat’ funkcional. Moze nım byt’ napr. funkcionaloperujuci na funkciach definovanych v bode x = 0 a jeho hodnota bude s(f) = f(0). Tymto kazdej funkciif definovanej v bode 0 priradıme jej funkcnu hodnotu v bode 0. Dalsım funkcionalom, ktory sa nam priamponuka, je nejaky urcity integral - napr. funkcional operujuci na funkciach integrovatel’nych na mnozine(0, 1), ktory potom kazdej funkcii f(x) priradı cıslo - hodnotu urciteho integralu v hraniciach od 0 po 1:
s(f) =
ˆ 1
0
f(x)dx
Takto mame priam nekonecne vel’a zaujımavych funkcionalov, ktore su prakticky vyuzitel’ne aj vo fyzike,ako sa uvidı neskor:
s(f) 7→
f(a)´ baf(x)dx...
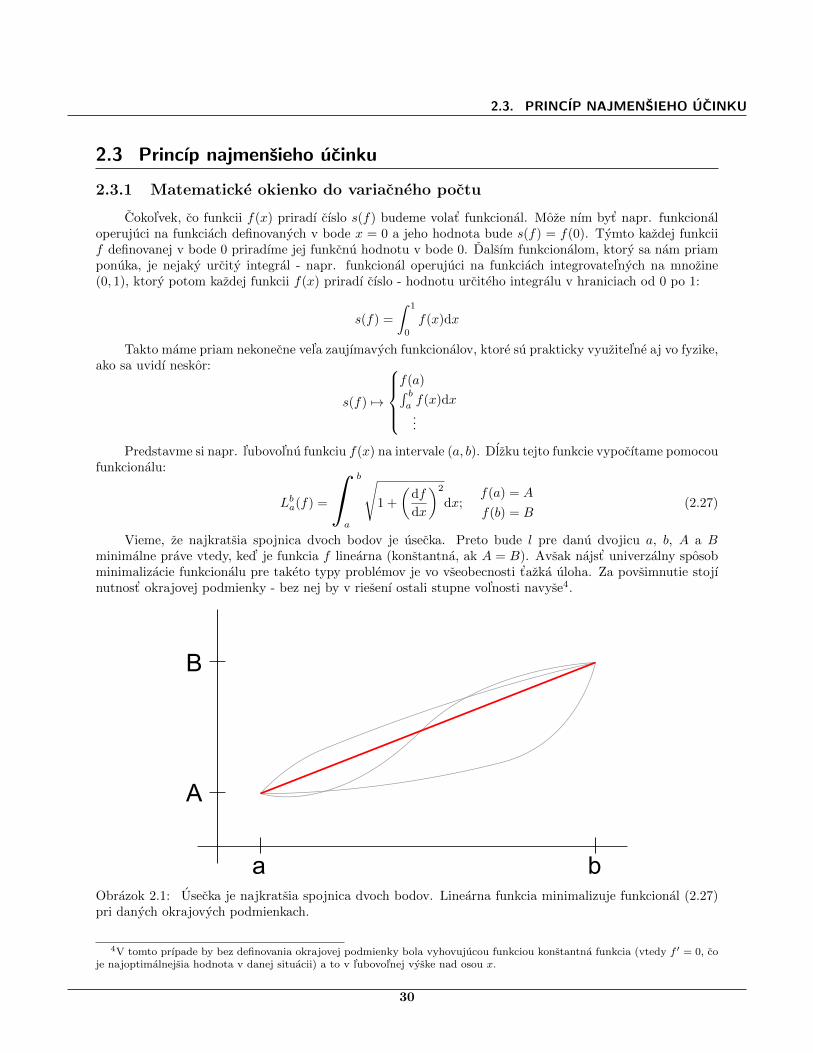
Predstavme si napr. l’ubovol’nu funkciu f(x) na intervale (a, b). Dlzku tejto funkcie vypocıtame pomocoufunkcionalu:
Lba(f) =
ˆa
b√1 +
(df
dx
)2
dx;f(a) = A
f(b) = B(2.27)
Vieme, ze najkratsia spojnica dvoch bodov je usecka. Preto bude l pre danu dvojicu a, b, A a Bminimalne prave vtedy, ked’ je funkcia f linearna (konstantna, ak A = B). Avsak najst’ univerzalny sposobminimalizacie funkcionalu pre taketo typy problemov je vo vseobecnosti t’azka uloha. Za povsimnutie stojınutnost’ okrajovej podmienky - bez nej by v riesenı ostali stupne vol’nosti navyse4.
A
B
a bObrazok 2.1: Usecka je najkratsia spojnica dvoch bodov. Linearna funkcia minimalizuje funkcional (2.27)pri danych okrajovych podmienkach.
4V tomto prıpade by bez definovania okrajovej podmienky bola vyhovujucou funkciou konstantna funkcia (vtedy f ′ = 0, coje najoptimalnejsia hodnota v danej situacii) a to v l’ubovol’nej vyske nad osou x.
30
2.3. PRINCIP NAJMENSIEHO UCINKU
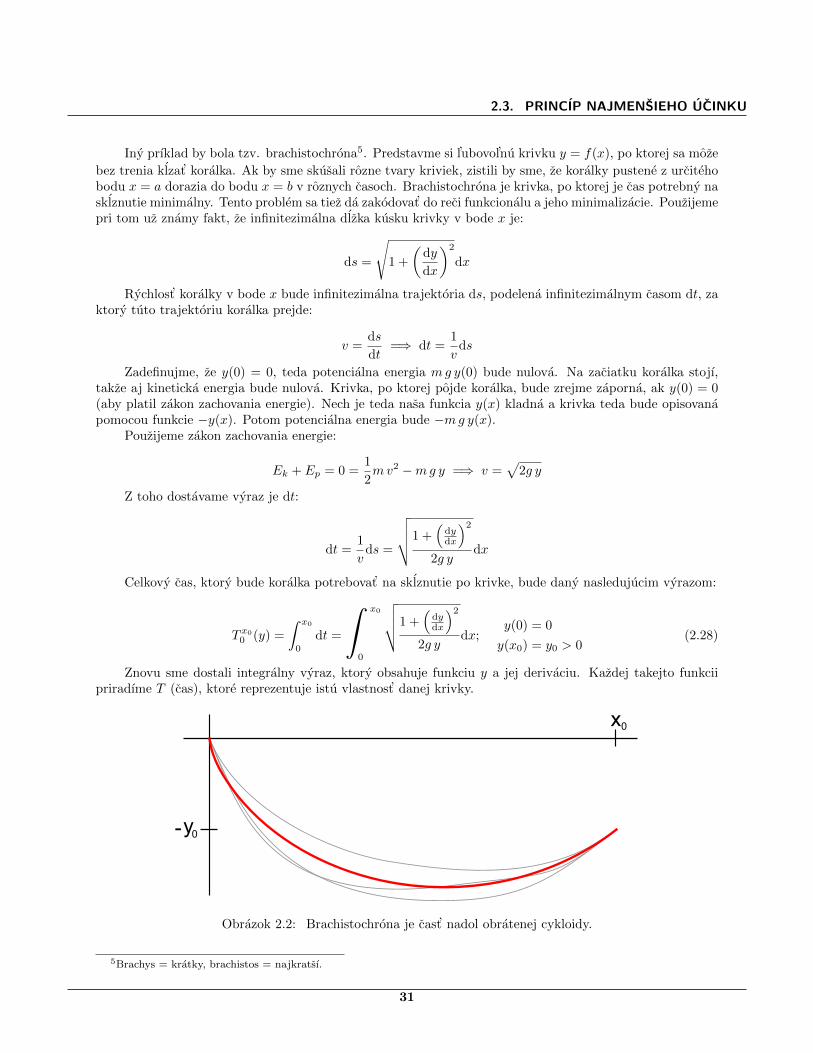
Iny prıklad by bola tzv. brachistochrona5. Predstavme si l’ubovol’nu krivku y = f(x), po ktorej sa moze
bez trenia klzat’ koralka. Ak by sme skusali rozne tvary kriviek, zistili by sme, ze koralky pustene z urcitehobodu x = a dorazia do bodu x = b v roznych casoch. Brachistochrona je krivka, po ktorej je cas potrebny nasklznutie minimalny. Tento problem sa tiez da zakodovat’ do reci funkcionalu a jeho minimalizacie. Pouzijemepri tom uz znamy fakt, ze infinitezimalna dlzka kusku krivky v bode x je:
ds =
√1 +
(dy
dx
)2
dx
Rychlost’ koralky v bode x bude infinitezimalna trajektoria ds, podelena infinitezimalnym casom dt, zaktory tuto trajektoriu koralka prejde:
v =ds
dt=⇒ dt =
1
vds
Zadefinujme, ze y(0) = 0, teda potencialna energia mg y(0) bude nulova. Na zaciatku koralka stojı,takze aj kineticka energia bude nulova. Krivka, po ktorej pojde koralka, bude zrejme zaporna, ak y(0) = 0(aby platil zakon zachovania energie). Nech je teda nasa funkcia y(x) kladna a krivka teda bude opisovanapomocou funkcie −y(x). Potom potencialna energia bude −mg y(x).
Pouzijeme zakon zachovania energie:
Ek + Ep = 0 =1
2mv2 −mg y =⇒ v =
√2g y
Z toho dostavame vyraz je dt:
dt =1
vds =
√√√√1 +(
dydx
)2
2g ydx
Celkovy cas, ktory bude koralka potrebovat’ na sklznutie po krivke, bude dany nasledujucim vyrazom:
T x00 (y) =
ˆ x0
0
dt =
ˆ0
x0√√√√1 +
(dydx
)2
2g ydx;
y(0) = 0
y(x0) = y0 > 0(2.28)
Znovu sme dostali integralny vyraz, ktory obsahuje funkciu y a jej derivaciu. Kazdej takejto funkciipriradıme T (cas), ktore reprezentuje istu vlastnost’ danej krivky.
x
y
0
0-
Obrazok 2.2: Brachistochrona je cast’ nadol obratenej cykloidy.
5Brachys = kratky, brachistos = najkratsı.
31
2.3. PRINCIP NAJMENSIEHO UCINKU
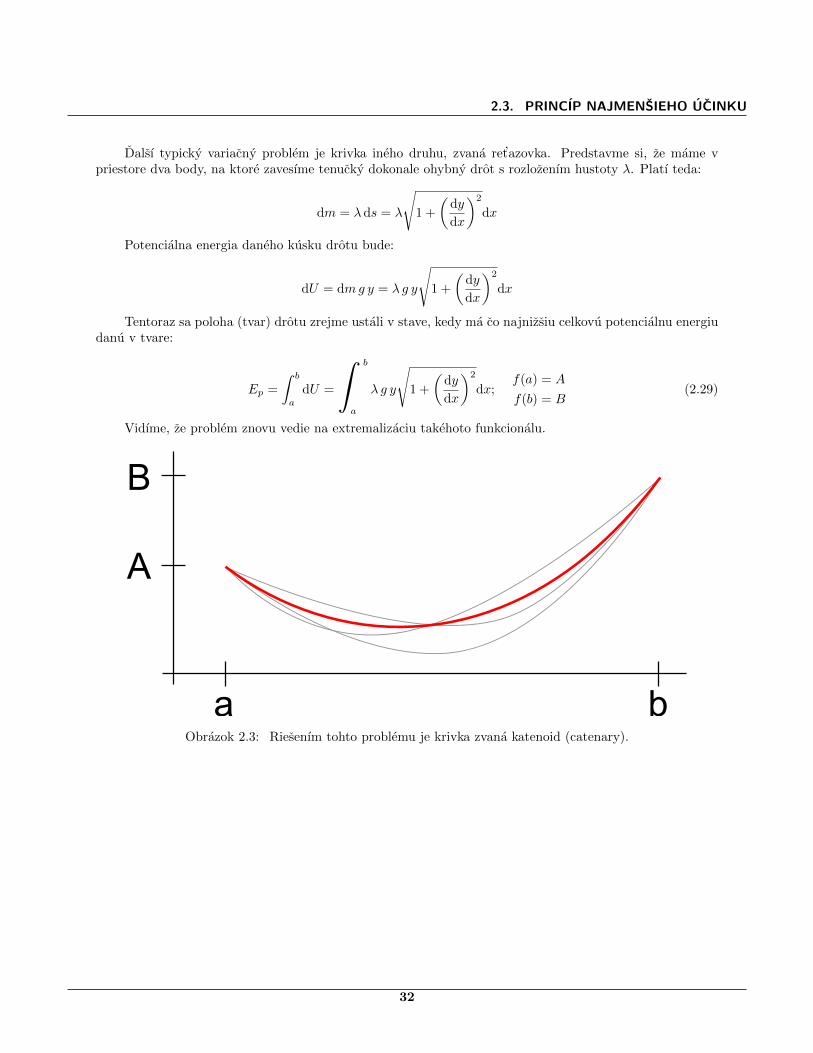
Dalsı typicky variacny problem je krivka ineho druhu, zvana ret’azovka. Predstavme si, ze mame vpriestore dva body, na ktore zavesıme tenucky dokonale ohybny drot s rozlozenım hustoty λ. Platı teda:
dm = λ ds = λ
√1 +
(dy
dx
)2
dx
Potencialna energia daneho kusku drotu bude:
dU = dmg y = λ g y
√1 +
(dy
dx
)2
dx
Tentoraz sa poloha (tvar) drotu zrejme ustali v stave, kedy ma co najnizsiu celkovu potencialnu energiudanu v tvare:
Ep =
ˆ b
a
dU =
ˆa
b
λ g y
√1 +
(dy
dx
)2
dx;f(a) = A
f(b) = B(2.29)
Vidıme, ze problem znovu vedie na extremalizaciu takehoto funkcionalu.
A
B
a bObrazok 2.3: Riesenım tohto problemu je krivka zvana katenoid (catenary).
32

2.3. PRINCIP NAJMENSIEHO UCINKU
Doteraz sme zakazdym dosli k vyrazu typu:
ˆ b
a
L (y, y′, x) dx (2.30)
kde L je nejaka funkcia premennej x, funkcie y a jej derivacie, ktora nam prirodzene vysla pri odvodzovanıtohto integralu. Riesenie pre funkciu y sme mohli dostat’ minimalizaciou tohto integralu. Tato uloha vyzeravel’mi obtiazne, hlavne ked’ nevieme, cım zacat’ (napr. by nam mohlo napadnut’ dosadzovat’ do integralurozne funkcie a skusat’, kedy nam vyjde co najmensie cıslo pre akekol’vek hranice). Teraz odvodıme metodu,akou sa mozno dopracovat’ k vyslednej funkcii, ktora minimalizuje dany integral. Zaved’me teda oznacenie:
S [y] =
ˆ b
a
L (y, y′, x) dx (2.31)
Predstavme si teraz, ze mame nejaku funkciu y(x). Zaved’me malicku odchylku od tejto funkcie, δy.Pre vselijake mozne vychylky teda dostavame rozne funkcie y + δy, ktore sa od funkcie y lısia len o malo.Vsetky vsak vychadzaju z toho isteho bodu v [a, y(a)] a koncia v tom istom bode [b, y(b)], preto teda platıδy(a) = δy(b) = 0.
Skumajme hodnotu S pre takuto funkciu trosku zmenenu oproti povodnej:
S [y + δy] =
ˆ b
a
L(y + δy, y′ + (δy)
′, x)
dx
Ked’ze δy je vel’mi male (spomenme si na virtualne posunutie v prvej kapitole), podintegralnu funkciumozeme rozvinut’ do prveho radu Taylorovho radu:
S [y + δy] =
ˆ b
a
L (y, y′, x) +
∂L∂y
δy +∂L∂y′
(δy)′
dx
Chceme sa dopatrat’ k tomu, co musı platit’, ked’ sme prave nasli tu nasu spravnu funkciu, ktoraminimalizuje vyraz S . To ale znamena, ze zmena tohto vyrazu S sa nemenı v rade δy, ak jeho argument(cize funkciu) zmenıme len o malu hodnotu δy - je to v podstate uplna analogia k extremu hladkej funkcierealnej premennej, ktora ma extrem v tych bodoch, v ktorych je funkcia necitliva na zmenu premennej do jejprveho radu - inak povedane, jej prva derivacia je rovna nule. Tu nemozeme privel’mi hovorit’ o derivaciach(pretoze y je funkcia), no stale sa mozeme pozriet’ na vyraz S [y + δy]−S [y], ktory v podstate pripomınadiferencial S , ak y berieme ako premennu:
S [y + δy]−S [y] =
ˆ b
a
L (y, y′, x) +
∂L∂y
δy +∂L∂y′
(δy)′
dx−ˆ b
a
L (y, y′, x) dx =
=
ˆ b
a
∂L∂y
δy +∂L∂y′
(δy)′
dx
Druhy vyraz pod integralom doplnıme nasledovne:
∂L∂y′
(δy)′
=
(∂L∂y′
δy
)′−(∂L∂y′
)′δy
Z rozdielu S [y + δy]−S [y] tak dostaneme:
S [y + δy]−S [y] =
ˆ b
a
[∂L∂y−(∂L∂y′
)′]δy
dx+
ˆ b
a
(∂L∂y′
δy
)′dx
33

2.3. PRINCIP NAJMENSIEHO UCINKU
V druhom integrali, ked’ze integrujeme derivaciu funkcie, je primitıvna funkcia priamo ∂L∂y′ δy. Vysledok
tohto integralu teda bude:
ˆ b
a
(∂L∂y′
δy
)′dx =
∂L∂y′
δy
∣∣∣∣ba
= 0
Samozrejme, vyuzili sme fakt, ze δy(a) = δy(b) = 0.Prvy integral napıseme krajsie:
S [y + δy]−S [y] =
ˆ b
a
δy(x)
(∂L∂y− d
dx
∂L∂y′
)dx
Musı samozrejme platit’, ze pre take y, ktore minimalizuju cıslo S , je tento vyraz nulovy. No to maplatit’ pre kazde δy(x), co moze byt’ splnene len ak druha cast’ (v zatvorke) pod integralom je nulova6:
∀δy(x)
ˆ b
a
δy(x)
(∂L∂y− d
dx
∂L∂y′
)dx = 0 =⇒ ∂L
∂y− d
dx
∂L∂y′
= 0 (2.32)
Tuto rovnicu nazyvame Eulerova rovnica, ktora je vo vseobecnosti diferencialna rovnica druheho radu.Taketo diferencialne rovnice na jednoznacne riesenie potrebuju okrajove podmienky, napr.: y(a) = Ya y(b) = Yb,poprıpade pociatocne podmienky, urcujuce y(a) a y′(a). V priebehu odvodenia sme predpokladali existenciuy′′ v kazdom bode intervalu 〈a, b〉, dostavame teda extremaly triedy C2.
Ako prıklad mozeme skusit’ vyriesit’ problem pre najkratsiu cestu. Funkcia L definujuca tento problembola:
L =
√1 +
(dy
dx
)2
Takuto funkciu by sme mali dosadit’ do Eulerovej rovnice a riest’. Este kym sa pustıme do bezhlavehoderivovania uvedomıme si, ze v L nevystupuje explicitne y, co ale znamena, ze z Eulerovej rovnice ostane:
− d
dx
(2y′√
1 + y′ 2
)= 0 =⇒ 2y′√
1 + y′ 2= C = konst.
Tuto rovnicu vsak vieme jednoducho riesit’:
2y′√1 + y′ 2
= C =⇒ y′ 2 =C2
1− C2=⇒ y = kx+ q
Konstanty k a q mozno vybrat’ tak, aby boli splnene okrajove, alebo pociatocne podmienky.Teraz vel’mi sugestıvne pod seba napıseme Eulerovu rovnicu a inu rovnicu, ktoru sme doteraz uz vel’akrat
pouzıvali:
d
dx
∂L∂y′− ∂L∂y
= 0
d
dt
∂L
∂q− ∂L
∂q= 0
(2.33)
6Vid’ zakladna lema variacneho poctu.
34

2.3. PRINCIP NAJMENSIEHO UCINKU
Pozorny citatel’ si vsimne istu podobnost’, ktora je v skutocnosti vel’mi vyznamna. Podl’a jednoduchejschemy zamenıme symboly:
L · · · L
y · · · q
y′ · · · q
x · · · t
V skutocnosti su tieto dve rovnice uplne totozne po zamene symbolov. Pred chvıl’ou sme vsak tvrdili,ze Eulerovu rovnicu riesi taka funkcia y, ktora extremalizuje prıslusny funkcional a opacne, funkcie, ktoreextremalizuju funkcional zaroven riesia Eulerove rovnice. Presne rovnaky princıp mozeme aplikovat’ naLagrangeove rovnice a prıslusny funkcional budeme oznacovat’ jeho pravym menom - ucinok.
2.3.2 Ucinok, princıp extremalneho ucinku
Uplne analogicky definujme funkcional pre Lagrangian, ktory budeme nazyvat’ ucinok (a oznacıme hosugestıvne S, ako analogiu ku S ):
S[q] =
ˆ tb
ta
L (q, q, t) dt (2.34)
Posledna skladacka do schemy teda bude:
ˆ b
a
L (y, y′, x) dx · · ·ˆ tb
ta
L (q, q, t) dt
S[y] · · · S[q]
Teraz mozeme sformulovat’ princıp extremalneho ucinku nasledovne: ucinok S[q] je extremalny natakych trajektoriach q(t), ktore si prıroda sama vybrala. Zaroven platı, ze tieto q(t) su rieseniami La-grangeovych rovnıc. Ak do L(q, q, t) dosadıme take q, ktore nam vyjde z riesenia Lagrangeovych rovnıc,potom ucinok S[q] bude necitlivy na zmenu v prvom rade δq. Inak povedane, ucinok S[q] ma extrem tam,kde je riesenie Lagrangeovych rovnıc v q.
System extremalizuje ucinok⇔ System bezı podl’a Lagrangeovych rovnıc
Este spomenieme, ze z hl’adiska ucinku sa ulohy delia na variacne, teda take, pre ktore ucinok existujea nevariacne, pre ktore ucinok neexistuje.
35

2.4. HAMILTONOVE ROVNICE
2.4 Hamiltonove rovnice
Odvodenie Hamiltonovych rovnıc bude vychadzat’ z Lagrangeovych rovnıc II. druhu, este predtym sivsak dovolıme uviest’ matematicku poznamku o Legendrovej transformacii.
2.4.1 Legendreova transformacia
Predstavme si, zatial’ bez zjavnej motivacie, ze by sme chceli istym zvlastnym sposobom definovat’
transformaciu suradnıc, ktore mame k dispozıcii:
x1, x2, · · · , xnZaved’me funkciu L, zavislu od suradnıc xi, na ktoru zatial’ nenalozıme ziadne predpoklady okrem
moznosti diferencovatel’nosti tejto funkcie podl’a jednotlivych suradnıc. Radi by sme teraz zıskali suradnicey1, y2, · · · , yn podl’a nasledovnej definıcie:
yi =∂L
∂xi(2.35)
Symbolicky tuto transformaciu naznacıme nasledovnym diagramom:
xL−→ y(x),
ktory symbolicky znacı transformaciu suradnıc xi pomocou funkcie L.Radi by sme teraz poznali transformaciu, ktora by previedla suradnice yi spat’ na xi. Este radsej by sme
boli, ak by bola takato transformacia realizovatel’na za pomoci nejakej funkcie H premennych y1, y2, · · · , yn,o ktorej platı:
xi =∂H
∂yi(2.36)
Symbolicky:
yH−→ x(y),
Ukazuje sa, ze funkcia, ktora splna tuto podmienku, je nasledujuceho tvaru:
H(y) = xi(y)yi − L[x(y)] (2.37)
Zderivovanım takto vybranej funkcie H podl’a yi dostaneme:
∂H
∂yi= yj
∂xj∂yi
+ xi −∂L
∂xj︸︷︷︸=yj
∂xj∂yi
= yj∂xj∂yi− yj
∂xj∂yi
+ xi = xi
Vidıme, ze funkcia H splna presne to, co od nej pozadujeme.
36

2.4. HAMILTONOVE ROVNICE
Majme teraz suradnice x1, x2, · · · , xn a z1, z2, · · · , zn z ktorych chceme transformovat’ len xi na yi.Mame teda funkciu L(x,y), o ktorej platı:
(x, z)L−→ (y, z)
Teda stale zdanlivo bezo zmeny (az na prıtomnost’ inych premennych vo funkcii L, okrem x) platı:
yi =∂L
∂xi
Aj k takejto transformacii by sme si priali najst’ funkciu H, ktora analogicky zabezpecı transformaciuopacnym smerom, bezo zmeny suradnıc z:
(y, z)H−→ (x, z)
xi =∂H
∂yi
Funkcia H ma kupodivu rovnaky tvar ako predtym a splna rovnaku podmienku:
H(y, z) = xi(y, z)yi − L[x(y), z] (2.38)
Presvedcıme sa o tom uplne rovnako ako v predoslom prıpade.Skumajme teraz diferencial funkcie H podl’a vzt’ahu (2.38):
dH = xidyi +XXXyidxi −ZZZZ
∂L
∂xidxi︸ ︷︷ ︸
=yidxi
− ∂L∂zi
dzi = xidyi −∂L
∂zidzi
Zaroven ale mozeme najst’ diferencial H podl’a premennych xi a zi:
dH =∂H
∂yidyi +
∂H
∂zidzi
Teraz porovname, co stojı pri jednotlivych diferencialoch a dostaneme dva dolezite vysledky:
xi =∂H
∂yi− ∂L
∂zi=∂H
∂zi(2.39)
Ten prvy nas vlastne utvrdil v tom, ze funkcia H naozaj robı to, co ma (na to bola skonstruovana).Druhy vysledok nam zatial’ nic rozumneho nehovorı, no bude dolezity neskor.
37

2.4. HAMILTONOVE ROVNICE
2.4.2 Hamiltonove rovnice
Vychadzajme z Lagrangeovych rovnıc. Za funkciu L si7 zoberme Lagrangian nejakej sustavy L(q, q, t).Ako i-tu zovseobecnenu hybnost’, pi, oznacme parcialnu derivaciu Lagrangianu L podl’a i-tej zovseobecnenejrychlosti qi:
pi ≡∂L
∂qi(2.40)
(q, q, t)L−→ (q,p, t)
Vidıme, ze ulohu x tu prebrala vlastne zovseobecnena rychlost’ q, ktora sa transformuje na zovseobecnenuhybnost’ p, pricom zovseobecnene suradnice q a cas t ostavaju nemenne, prebrali teda ulohu z.
Funkciu, ktora transformuje hybnost’ spat’ na zovseobecnenu rychlost’, a ktoru budeme volat’ Hamiltoniansustavy, bude podl’a (2.38) definovana nasledovne:
H ≡ qipi − L (2.41)
Z (2.39) dostavame:
qi =∂H
∂pi
∂H
∂qi= − ∂L
∂qi∧ ∂H
∂t= −∂L
∂t
∂L
∂qi= pi =⇒ pi = −∂H
∂qi
Sustava teda splna Hamiltonove rovnice:
qi =∂H
∂pi
pi = −∂H∂qi
(2.42)
Prıklad: rovinne matematicke kyvadlo v Hamiltonovych rovniciach. Ako vieme z predoslych prıkladov,Lagrangian tejto sustavy je:
L(ϕ, ϕ, t) =1
2ml2ϕ2 +mgl cos(ϕ)
Pre Hamiltonian z 2.41 dostavame:
H = ϕ ml2ϕ︸ ︷︷ ︸pϕ
−[
1
2ml2ϕ2 +mgl cos(ϕ)
]pϕ = ml2ϕ =⇒ ϕ =
pϕml2
=⇒ H =p2ϕ
2ml2−mgl cos(ϕ)
Hamiltonove rovnice:
ϕ =pϕml2
pϕ = −mgl sin(ϕ)
7Ako sme uz sugestıvne v matematickej poznamke naznacili oznacenım funkcie pısmenkom L.
38

2.4. HAMILTONOVE ROVNICE
Ako vidıme, tieto rovnice su ocividne dve. Obe spolu, ako sustava diferencialnych rovnıc su ekvivalentnerovnici rovinneho matematickeho kyvadla:
ϕ+g
lsin(ϕ) = 0
Zaroven vsak vidıme, ze derivacie, ktore sa v Hamiltonovych rovniciach objavuju, su nanajvys prvehoradu (narozdiel od Lagrangeovych rovnıc). Ich rieseniami su okrem zovseobecnych suradnıc aj zovseobecnenehybnosti.
Vseobecne platı, ze Hamiltonovych rovnıc je dvojnasobok oproti Lagrangeovym rovniciam, no ich radderivacie je zredukovany na prvy.
V priebehu odvodenia Hamiltonianu (to je funkcia, v ktorej uz nevystupuje ziadna suradnica derivovanapodl’a casu) sme museli upravit’ tvar samotnej funkcie tak, aby sa v nom neobjavilo ϕ. Tento postup sa davyjadrit’ vseobecne. O Lagrangiane vieme, ze sa (pre potencialnu energiu zavislu len od zovseobecnenychsuradnıc) da zapısat’ v tvare:
L =1
2Tij qiqj − U(q)
Z (2.40) vieme, comu je rovna i-ta zovseobecnena hybnost’:
pi =∂L
∂qi= Tij qj
Tuto hybnost’ dosadıme do (2.41):
H = pj qj − L = Tij qiqj − L = 2T − (T − U) = T + U = E
Dostali sme dolezity vysledok vyjadrujuci, ze Hamiltonian je vlastne rovny celkovej energii sustavy.Vyjadrime si este raz Hamiltonian, tentoraz len pomocou zovseobecnenych rychlostı a suradnıc:
H = Tij qiqj − L = Tij qiqj −1
2Tij qiqj + U =
1
2Tij qiqj + U
Budeme hl’adat’ sposob, ako vyjadrit’ jednotlive zovseobecnene rychlosti pomocou zovseobecnenych hyb-nostı:
pi = Tij qj =⇒ qi =(T−1
)ijpj
Hamiltonian tak prejde na tvar:
H =1
2Tij qiqj + U =
1
2Tij(T−1
)ikpk(T−1
)ljpl + U
Matica Tij je symetricka. Z toho vyplyva, ze aj matica(T−1
)ij
je symetricka, teda platı:
Tij = Tji =⇒(T−1
)ij
=(T−1
)ji
Vrat’me sa teda k Hamiltonianu, kde tuto symetriu vyuzijeme:
H =1
2Tij(T−1
)ik
(T−1
)ljpkpl + U =
1
2Tji(T−1
)ik︸ ︷︷ ︸
=(T T−1)jk
(T−1
)ljpkpl + U =
=1
2
(T T−1
)jk︸ ︷︷ ︸
=δjk
(T−1
)ljpkpl + U =
1
2
(T−1
)klpkpl + U
Dostavame teda tvar Hamiltonianu, ktory vieme vyjadrit’ ak pozname maticu kinetickej energie, T :
H(q,p) =1
2
(T−1
)klpkpl + U(q)
39

2.4. HAMILTONOVE ROVNICE
2.4.3 Poissonove zatvorky
Majme danu funkciu f zovseobecnenych suradnıc, zovseobecnenych hybnostı a casu. Pocıtajme jejcasovu derivaciu (totalnu):
f (q,p, t) =∂f
∂t+∂f
∂qiqi︸︷︷︸
=∂H
∂pi
+∂f
∂pipi︸︷︷︸
= −∂H∂qi
=∂f
∂t+
(∂H
∂pi
∂f
∂qi− ∂f
∂pi
∂H
∂qi
)
Objekt v gul’atej zatvorke nazveme Poissonovou zatvorkou:
f,H ≡ ∂H
∂pi
∂f
∂qi− ∂f
∂pi
∂H
∂qi(2.43)
Analogicky Poissonova zatvorka z dvoch l’ubovol’nych funkciı, f a g, je definovana nasledovne:
f, g ≡ ∂f
∂qi
∂g
∂pi− ∂g
∂qi
∂f
∂pi(2.44)
Je zrejme, ze ak vo funkciı f nevystupuje explicitne cas t, potom jej casova derivacia je rovna Poissonovejzatvorke Hamiltonianu s danou funkciou:
f(q,p, Ct
)=⇒ f = f,H
Poissonova zatvorka dvoch rovnakych funkciı je nulova:
f, f =∂f
∂pi
∂f
∂qi− ∂f
∂pi
∂f
∂qi= 0
Poissonova zatvorka qi, pj je rovna δij :
qi, pj =∂qi∂qk
∂pj∂pk− ∂qi∂pk
∂pj∂qk
= δij
co je jedna, ak je sustava opısana len jednou zovseobecnenou suradnicou a hybnost’ou.Ak Poissonove zatvorky chapeme ako operator, ktory z priestoru funkciı vyberie dve a priradı im tretiu
funkciu, potom takyto operator je bilinearny:
f + λ g, h = f, h+ λ g, h
f, g + λh = f, g+ λ f, h
Poissonove zatvorky su taktiez antisymetricke (zmenia znamienko po vymene argumentov):
f, g = −g, f
V tomto vidiet’ analogiu s vektorovym sucinom, ktory po vymene argumentov (vektorov) tiez zmenıznamienko. Dalsiu analogiu uvidıme v takzvanej Jacobiho identite, ktoru poissonove zatvorky, tak ako ajvektorovy sucin, splnaju:
f, g , h+ g, h , f+ h, f , g = 0
Poissonove zatvorky maju svoju analogiu v kvantovej mechanike, kde namiesto nich pouzıvame ko-mutator [A, B] = AB − BA, kde A a B su operatory. Komutator tiez splna Jacobiho identitu a komutatoroperatora polohy a operatora hybnosti je rovny i~, [x, px] = i~.
40
3Dalsie aplikacie Lagrangeovskeho a Hamiltonovskeho
prıstupu v mechanike
3.1 Potencialna energia a sila*
3.1.1 Zovseobecnena potencialna energia*
Doteraz sme sa zaoberali len aktıvnymi silami, ktore zavisia explicitne len od polohy a k nim prisluchajucimipotencialmi, ktore taktiez zavisia len od polohy. Ukazeme si, ze aj niektore sily, ktore zavisia od vyssej de-rivacie polohy, popr. casu, je mozne opısat’ potencialom a to dokonca aj vtedy, ak nie su potencialove1.Najprv vsak musıme poupravit’ vypocet potencialu, ak ma zavisiet’ aj od zovseobecnenych rychlostı a casu,nielen od zovseobecnenych suradnıc. Podl’a (2.22) pre Qi zavisle aj od casu a zovseobecnenych rychlostıpıseme:
d
dt
∂T
∂qi− ∂T
∂qi= Qi (q, q, t)
Nech je teraz dane Qi (q, q, t) opısatelne jedinou funkciou U (q, q, t) tak, ze stale platı L = T − U azaroven platı pre toto L pohybova rovnica pre qi:
d
dt
∂L
∂qi− ∂L
∂qi= 0
d
dt
∂ (T − U)
∂qi− ∂ (T − U)
∂qi= 0
d
dt
∂T
∂qi− d
dt
∂U
∂qi−(∂T
∂qi− ∂U
∂qi
)= 0
d
dt
∂T
∂qi− ∂T
∂qi=
d
dt
∂U
∂qi− ∂U
∂qi︸ ︷︷ ︸=Qi(q,q,t)
Qi (q, q, t) = −∂U (q, q, t)
∂qi+
d
dt
∂U (q, q, t)
∂qi(3.1)
Vhodnym prıkladom na takuto silu je Lorentzova elektromagneticka sila, dana predpisom:
~F = Q(~E + ~v × ~B
)
1Nie su potencialove v zmysle, ze krivkovy integral II. druhu v ich poli zavisı od vyberu krivky.
41

3.1. POTENCIALNA ENERGIA A SILA*
To, ci je tato sila potencialova v zmysle, ze krivkovy integral II. druhu v poli tejto sily nezavisı odkrivky, po ktorej integrujeme, sa da l’ahko preverit’. Tento fakt je totiz ekvivalentny tomu, ze krivkovyintegral po niektorej uzavretej krivke nevyjde nulovy. Pocıtajme teda taky krivkovy integral po niektorejblizsie nespecifikovanej uzavretej krivke:
˛C
~F · d~l = Q˛C
d~l ·(~E + ~v × ~B
)˛C
~F · d~l = Q˛C
~E · d~l +Q˛C
d~l ·(~v × ~B
)Na integral ~E ·d~l mame jednoduchy liek, je nım Faradayov zakon elektromagnetickej indukcie. Problem
moze robit’ druhy integral, prepısme si vyraz d~l ·(~v × ~B
)do indexov a upravujme:
d~l ·(~v × ~B
)= dli
(~v × ~B
)i
= dliεijkvjBk = Bkεkijdlivj = ~B ·(d~l × ~v
)Avsak tento vyraz je identicky rovny nule, pretoze v kazdom bode krivky je rychlost’ hmotneho bodu,
ktory sa po nej pohybuje, dotycnicou k tejto krivke. No rovnaky smer ma aj diferencial tejto krivky, tedaplatı:
d~l ‖ ~v =⇒ d~l × ~v = ~0
Druhy integral je tymto vybaveny, je identicky rovny nule. Ostava nam vyraz:
˛C
~F · d~l = Q˛C
~E · d~l
Tu vyuzijeme spomınany Faradayov zakon elektromagnetickej indukcie, ktory vravı: elektromotorickenapatie je dane zapornou casovou zmenou toku magnetickeho pol’a. Zapısane v reci matematiky:
˛∂S
~E · d~l = − d
dt
¨S
~B · d~S
V tomto kroku sa zdanlivo vzdialime od prave pocıtaneho vyrazu a pozrieme sa na jednu z maxwellovychrovnıc:
~∇ · ~B = 0
Toto platı vzdy, za kazdych okolnostı, teda to nas opravnuje zaviest’ vektor ~A, magneticky potencial,ktory bude splnat’ rovnicu:
~B = ~∇× ~A (3.2)
Je tomu tak preto, lebo divergencia rotacie je vzdy identicky rovna nule:
~∇ ·(~∇× ~A
)≡ 0
Vrat’me sa k pocıtanemu vyrazu, kde vyuzijeme (3.2):
˛∂S
~E · d~l = − d
dt
¨S
(~∇× ~A
)· d~S
42

3.1. POTENCIALNA ENERGIA A SILA*
V tejto chvıli zacına byt’ zrejme, ze casovo premenne magneticke polia uz nebudu generovat’ potencialovesily. Dokoncime odvodenie - na l’avu stranu pouzijeme Kelvin-Stokesovu vetu:
˛∂S
~E · d~l =
¨S
(~∇× ~E
)· d~S
Tento vyraz dame do rovnosti s magnetickym indukcnym tokom a vyuzijeme vetu o derivovanı para-metrickeho integralu:
¨S
(~∇× ~E
)· d~S = − d
dt
¨S
(~∇× ~A
)· d~S = −
ˆS
(~∇× ∂ ~A
∂t
)· d~S
Vsetko presunieme na l’avu stranu a vlozıme pod jeden integral:ˆS
(~∇× ~E + ~∇× ∂ ~A
∂t
)· d~S = 0
(∀S)
Toto ma ale platit’ pre kazdu plochu S, co moze byt’ splnene len vtedy, ak vnutro integralu je rovnenule:
~∇× ~E + ~∇× ∂ ~A
∂t= 0
Este vyraz upravıme tak, ze vlozıme ~E aj ∂t ~A pod operator rotacie:
~∇×
(~E +
∂ ~A
∂t
)= 0 (3.3)
Okrem faktu, ze Lorentzova sila je vo vseobecnom prıpade nekonzervatıvna, dostavame vel’mi zaujımavyvysledok. Pre uplne vseobecne polia ~E a ~B uz neplatı, ze rotacia ~E je nulova. Platı vsak rovnaky vzt’ah, akk nej pripocıtame opravny clen - prave casovu zmenu magnetickeho potencialu. Preto teraz mozeme zaviest’
potencial φ tak, aby platilo:
~E +∂ ~A
∂t= −~∇φ (3.4)
Potom rovnica (3.3) bude automaticky splnena:
~∇×
(~E +
∂ ~A
∂t
)= ~∇×
(−~∇φ
)= −~∇×
(~∇φ)
= ~0
Podl’a (3.2) a (3.4) mozeme napısat’ potencial Lorentzovej sily, o ktoreho platnosti s vyuzitım (3.4) sapresvedcıme na par nasledujucich riadkoch:
U(~r, ~r, t
)= Q
(φ− ~r · ~A
)Podl’a (3.1) ma teda pre tento potencial (v suradniciach xi, xi) platit’:
Fi = Q[Ei +
(~r × ~B
)i
]?= − ∂U
∂xi+
d
dt
∂U
∂xi; kde U = Q
(φ− ~r · ~A
)
43

3.1. POTENCIALNA ENERGIA A SILA*
Tuto rovnost’ teraz overıme:
− ∂U∂xi
= −Q ∂
∂xi
(φ− ~r · ~A
)= −Q ∂
∂xi(φ− xjAj) = −Q ∂φ
∂xi+Q xj
∂Aj∂xi
−Q ∂φ
∂xi= −Q
(~∇φ)i
= QEi +Q∂Ai∂t
d
dt
∂U
∂xi= Q d
dt
[∂
∂xi
(φ− ~v · ~A
)]= Q d
dt
[∂
∂xi(φ− xjAj)
]= −Q d
dt(δijAj) = −QdAi
dt
−QdAidt
= −Q∂Ai∂t−Q∂Ai
∂xjxj
− ∂U∂xi
+d
dt
∂U
∂xi= Q
(Ei +
∂Ai∂t
+ xj∂Aj∂xi− ∂Ai
∂t− ∂Ai∂xj
xj
)= Q
[Ei + xj
(∂Aj∂xi− ∂Ai∂xj
)]Ostava nam jeden nevyjasneny vyraz v zatvorke. Pocıtajme ~r × ~B = ~r ×
(~∇× ~A
):
Bj =(~∇× ~A
)j
= εjab∂Ab∂xa(
~r × ~B)i
= εikj xkBj = εikjεjabxk∂Ab∂xa
= (δiaδkb − δibδka) xk∂Ab∂xa
= xk∂Ak∂xi
− xk∂Ai∂xk
=⇒(~r × ~B
)i
=[~r ×
(~∇× ~A
)]i
= xk
(∂Ak∂xi
− ∂Ai∂xk
)teda dany nevyjasneny vyraz je presne to, co ma na tom mieste stat’, vyraz − ∂U
∂xi+
d
dt
∂U
∂xidava i-tu zlozku
Lorentzovej sily:
− ∂U∂xi
+d
dt
∂U
∂xi= Q
[Ei +
(~r × ~B
)i
]= Fi
cım je dokaz zavrseny.
44

3.1. POTENCIALNA ENERGIA A SILA*
Dalsia silu, ktorej sa pokusime najst’ zovseobecnenu potencialnu energiu, bude trecia sila. Jej predpis vkartezskych suradniciach je:
~F = −k~r =⇒ Fi = −kxi; k > 0 (3.5)
Odvodenie spravıme vseobecnejsie, a to pre zovseobecnene suradnice a rychlosti. Ukazuje sa, ze prepistrecej sily Qi (q) bude o trochu zlozitejsı:
~Q = −
k11 k12 · · · k1n
k21 k22 · · · k2n
......
. . ....
kn1 kn2 · · · knn
q1
q2
...qn
=⇒ Qi = −kij qj ; kij je kladne definitna a symetricka matica2
(3.6)
Vo vseobecnosti nepredpokladame, ze po zavedenı parametrizacie konfiguracneho priestoru, bude nad’alejplatit’, ze pri pohybe v smere niektorej zo suradnıc qi bude trecia sila posobit’ presne opacne. Avsak, mozemesi byt’ istı, ze ak platı (3.6), tak najhorsie, co nas moze z hl’adiska odporu stretnut’, je vo vseobecnostinanajvys linearny vzt’ah medzi zovseobecnenymi rychlost’ami q a trecou silou Q.
Pre takuto silu by sme radi napısali potencialnu energiu U , ktora je vo vseobecnosti zavisla na zovseobecnenychsuradniciach, rychlostiach a case a podl’a (3.1) pren bude platit’:
−∂U∂qi
+d
dt
∂U
∂qi= −kij qj
O tomto potenciali zatial’ nic nevieme, pod’me si teda rozpısat’ l’avu stranu rovnice:
−∂U∂qi
+
(∂
∂t+ qj
∂
∂qj+ qj
∂
∂qj
)(∂U
∂qi
)= −∂U
∂qi+
∂2U
∂t∂qi+
∂2U
∂qj∂qiqj +
∂2U
∂qj∂qiqj
!= −kij qj = Qi (q)
Vidıme, ze vzhl’adom na to, ze Qi ma zavisiet’ len od q, clen, pri ktorom stojı qj musı byt’ nulovy:
∂2U
∂qj∂qi
!= 0
O com nam vlastne hovorı tato podmienka? Hovorı, ze druha parcialna derivacia potencialnej energiepodl’a zovseobecnenych rychlostı da nulu. To vsak znamena, ze samotna potencialna energia musı zavisiet’
od zovseobecnenych rychlostı nanajvys linearne:
∂2U
∂qj∂qi
!= 0 =⇒ U (q, q, t)
!= ai (q, t) qi + b (q, t)
Vd’aka tejto podmienke vypadne nezelany clen, ktory obsahoval qj . Dalsie pozorovanie, ktore urobıme,sa bude tykat’ casovych zavislostı:
−∂U∂qi
+∂2U
∂t∂qi+
∂2U
∂qj∂qiqj = −∂aj
∂qiqj −
∂b
∂qi+∂ai∂t
+∂ai∂qj
qj =
(∂ai∂qj− ∂aj∂qi
)qj +
∂ai∂t− ∂b
∂qi
Qi ma byt’ funkciou q, no dva posledne cleny uz nemaju sancu byt’ funkciou q (pretoze ai aj b sufunkciami q a t). Musı teda platit’, ze tieto cleny su nulove:
∂ai∂t
= 0 =⇒ ai (q, t) = ai (q) ; − ∂b
∂qi= 0 =⇒ b (q, t) = b (t)
2To, ze matica kij je kladne definitna mozeme intuitıvne nahliadnut’ z analogie s trecou silou v kartezskych suradniciach.Ak by sa to nepodarilo, este existuje argument, ku ktoremu dojdeme neskor. Jej symetriu tiez pol’ahky ukazeme neskor.
45

3.1. POTENCIALNA ENERGIA A SILA*
V hre ostane jediny clen: (∂ai∂qj− ∂aj∂qi
)qj
!= −kij qj
Avsak toto je problem. Vyraz na l’avej strane:
aij =∂ai∂qj− ∂aj∂qi
je totiz antisymetricka matica, pretoze platı:
aij = −aji,
co okrem ineho znamena, ze a11 = a22 = a33 = 0. Avsak pre maticu kij platı:
kij = kji,
co je v priamom rozpore s aij .3
Presvedcili sme sa, ze neexistuje potencialna energia (ani zovseobecnena), ktora by vedela v sebe zahrnut’
treciu silu. Tento fakt je nam motivaciou ku d’alsiemu paragrafu, kde si povieme nieco o tom, ako narabat’
s nepotencialovymi silami v Lagrangeovych rovniciach.
3Tuto neexistenciu sme ukazali len pre Lagrangian, ktory ma strukturu L = T − U = 12Tabqaqb − U (q, q, t). Existuje taka
struktura Lagrangianu, ze problem hmotneho bodu v odporovom prostredı zapısany v tomto Lagrangiane bude mat’ svojupohybovu rovnicu (ekvivalentnu s Newtonovou) v tvare:
d
dt
∂L
∂qi−∂L
∂qi= 0
L’ahko sa ukaze, ze Lagrangian pre jednu casticu v smere x, ktory vedie na pohybovu rovnicu s odporovym clenom, je v tvare:
L = eγ tm (T − U) = e
γ tm
[1
2mx2 − U(x)
]Takyto tvar Lagrangianu vedie na pohybovu rovnicu v tvare:
mx = −∂U
∂x− γx
Tento Lagrangian ale zavisı od casu explicitne a nie je tvaru T − U .
46

3.1. POTENCIALNA ENERGIA A SILA*
3.1.2 Nepotencialova zlozka sily a jej vykon*
V predoslom paragrafe sme si na prıklade o trecej sile ukazali, ze neexistuje taka zovseobecnena po-tencialna energia, ktora by v sebe zahrnala takuto silu. Na tento problem z hl’adiska Lagrangeovych rovnıcexistuje jednoduche riesenie. Predpokladajme, ze mame silu, ktora sa da napısat’ ako sucet potencialoveja nepotencialovej casti. Mozeme rovno ratat’ s tym, ze potencialova cast’ zavisı len od zovseobecnenychsuradnıc a da sa vyjadrit’ pomocou gradientu nejakeho potencialu:
Qi = −∂U∂qi
+ Qi
Ukazeme si, na aky tvar prejdu pohybove rovnice s takouto silou. Z (2.22) dostavame:
d
dt
∂T
∂qi− ∂T
∂qi= Qi = −∂U
∂qi+ Qi
Znovu zaved’me Lagrangian, tentoraz ako rozdiel kinetickej energie a potencialnej energie potencialovejzlozky sily, L = T − U . Z tejto rovnice teda dostaneme4:
d
dt
∂T
∂qi− ∂T
∂qi+
d
dt
∂U
∂qi︸ ︷︷ ︸=0
+∂U
∂qi= Qi
d
dt
∂(T − U)
∂qi− ∂(T − U)
∂qi= Qi
d
dt
∂L
∂qi− ∂L
∂qi= Qi (3.7)
Budeme situaciu znovu skumat’ za predpokladu, ze cas nevstupi explicitne do Lagrangianu. Platı:
∂L
∂t= 0
Za tejto podmienky skumajme vyraz Qiqi:
Qiqi =d
dt
(∂L
∂qi
)qi −
∂L
∂qiqi (3.8)
Tento vyraz je v platny zmysle Einsteinovej sumacnej konvencie - vezmeme Lagrangeovu rovnicu preprvu zovseobecnenu suradnicu, prenasobıme ju prvou zovseobecnenou rychlost’ou a k nej pripocıtame druhurovnicu prenasobenu druhou zovseobecnenou rychlost’ou atd’.
Urobıme uzitocne pozorovanie:
d
dt
(∂L
∂qiqi
)=
d
dt
(∂L
∂qi
)qi +
∂L
∂qiqi =⇒ d
dt
(∂L
∂qi
)qi =
d
dt
(∂L
∂qiqi
)− ∂L
∂qiqi
Toto vyuzijeme v (3.8):
Qiqi =d
dt
(∂L
∂qiqi
)− ∂L
∂qiqi −
∂L
∂qiqi (3.9)
4Pripomıname, ze tato struktura nie je povinna. Nikto nediktuje, ktoru konkretnu cast’ sıl musı clovek zahrnut’ do U - ak jevyjadrovanie potencialu danej sily prılis zlozite, nic nebrani v presunutı celej sily (teda aj potencialovej casti) na pravu stranu.Dovodom, preco sa tieto rovnice nenechali v tvare (2.22), je uzky suvis medzi Lagrangeovymi rovnicami v tvare:
d
dt
∂L
∂qi−∂L
∂qi= 0
a ucinkovym integralom z Lagrangianu.
47

3.1. POTENCIALNA ENERGIA A SILA*
Teraz pocıtajme totalnu casovu derivaciu L:
dL
dt= L =
SSS
∂L
∂t+∂L
∂qiqi +
∂L
∂qiqi =
∂L
∂qiqi +
∂L
∂qiqi
No presne tento vyraz sa nachadza so zapornym znamienkom v (3.9):
d
dt
(∂L
∂qiqi
)− ∂L∂qi
qi −∂L
∂qiqi︸ ︷︷ ︸
=−L
=d
dt
(∂L
∂qiqi
)− L (3.10)
Na vyrazd
dt
(qi∂L
∂qi
)sme narazili uz niekol’kokrat:
d
dt
(∂L
∂qiqi
)=
d
dt
[∂
∂qi
(1
2Tabqaqb
)qi
]=
d
dt(Tibqbqi) =
d
dt(2T ) = 2T
Teda z rovnice (3.10) dostavame:
Qiqi =d
dt
(∂L
∂qiqi
)− L = 2T −
(T − U
)= T + U = E
E = Qiqi (3.11)
Vzt’ah E = Qiqi vlastne udava vykon nepotencialovej zlozky sily. Ak je sila nepotencialova, potom sapri nevstupovanı casu do Lagrangianu nezachovava energia (to je prıpad E = 0), ale dostavame vzt’ah prevykon.
Vrat’me sa teraz k prıkladu o trecıch silach. V podstate empiricky sme dosli k tvrdeniu, ze trecie silymozno reprezentovat’ linearnou formou:
Qi = −kij qjAk sa pokusime najst’ vykon trecej sily pre jednu casticu, podl’a (3.11) dostaneme (cela sila sa v tomto
prıpade ukryje do nepotencialovej casti, preto Qi = Qi):
P = Qiqi = −kij qj qiLenze tento vykon musı mat’ logicky vzdy zapornu hodnotu az na prıpad, ked’ su vsetky zovseobecnene
rychlosti nulove (staticky prıpad). Ak by to tak nebolo, dostali by sme prıpad, ked’ sa system nejakymsposobom pohybuje, no vykon je kladny (energia narasta), alebo nulovy (nestraca sa), co neznie pravde-podobne. Vzhl’adom na to, ze vykon P je dany kvadratickou formou −kij qj qi a platı, ze je zaporny pravevtedy, ked’ aspon jedna zo zovseobecnenych rychlostı q nie je nulova, potom tato kvadraticka forma je zapornedefinitna. To ale znamena, ze matica tejto formy je zaporne definitna. Touto maticou je −kij , teda samotnamatica kij musı byt’ kladne definitna.
Samotne odvodenie symetrie matice kij vyplyva ako priamy dosledok definıcie (2.19) zovseobecnenychsıl:
Qi = F aj∂rj∂qi
Vieme, ze v kartezskych suradniciach je nasa trecia sila vyjadrena v tvare (pre nejakych N bodov, vovseobecnosti s roznymi koeficientami trenia):
~Fk = −Kk~rk
kde ~Fk je trecia sila k-teho hmotneho bodu v sustave, 1 ≤ k ≤ N , Kk je jeho trecı koeficient a ~rk jehorychlost’.
48

3.1. POTENCIALNA ENERGIA A SILA*
Potom z (2.19) dostavame:
Qi = ~Fk ·∂~rk∂qi
= −N∑k=1
Kk~rk ·∂~rk∂qi
= −N∑k=1
Kk
(∂~rk∂qm
qm
)· ∂~rk∂qi
= −N∑k=1
Kk∂~rk∂qm
· ∂~rk∂qi
qm
Oznacme teraz:
N∑k=1
Kk∂~rk∂qi· ∂~rk∂qj≡ kij
Potom trecia sila v zovseobecnenych suradniciach prejde na tvar:
Qi = −kij qj
kde kij splna symetriu5:
N∑k=1
Kk∂~rk∂qi· ∂~rk∂qj
=
N∑k=1
Kk∂~rk∂qj· ∂~rk∂qi
=⇒ kij = kji
5Symetria je splnena pre najjednoduchsı prıpad, kedy sme predpokladali, ze trecia sila pre kazdy hmotny bod v nejakejsustave hmotnych bodov je zavisla len linearne od rychlosti daneho hmotneho bodu:
Fi = −Kij xjDalsı predpoklad bol, ze Kij = Kδij , teda trecia sila posobı v smere opacnom voci smeru pohybu hmotneho bodu ~r (~F ‖ ~r).Existuju samozrejme aj zlozitejsie koncepty trenia. Naprıklad teleso, ktore sa pohybuje v tekutom prostredı, je brzdene
trenım, ktore pre vysoke hodnoty Reynoldsovho cısla zavisı od druhej mocniny rychlosti pohybu telesa voci prostrediu. Pretake trenie vsak linearita nemoze byt’ splnena uz len z princıpu kvadratickeho odporu.
49

3.2. FAZOVY PRIESTOR
3.2 Fazovy priestor
Pokial’ sme pracovali s Lagrangeovymi rovnicami, mali sme definovany konfiguracny priestor, v ktorommali suradnice q dovolene sa pohybovat’. Ked’ sme presli ku Hamiltonovym rovniciam, zdvojnasobil sa pocetpremennych, ktore vstupuju do tychto rovnıc. Pre tieto premenne zavedieme pojem fazoveho priestoru, coje priestor, v ktorom maju dovolene hybat’ sa prave zovseobecnene suradnice a zovseobecnene hybnosti.
3.2.1 Kvalitatıvne riesenie Hamiltonovych rovnıc*
Predstavme si, kvoli jednoduchosti, ze nas system je opısany prave jednou zovseobecnenou suradnicouϕ. Fazovy priestor teda bude rovina, kde na jednej osi bude aktualna hodnota ϕ a na druhej hodnota pϕ.Tieto suradnice maju vyhovovat’ Hamiltonovym rovniciam, samozrejme aj s pociatocnymi podmienkami. Dofazoveho priestoru sa nam pociatocna podmienka premietne existenciou nejakeho ϕ0 a pϕ0 - stav systemu vcase t = 0 (alebo inom pociatocnom case t0). Z tohto bodu mozeme vychadzat’ d’alej. Hamiltonove rovnicenam totiz jednoznacne hovoria, ktorym smerom (vo fazovom priestore) sa mame pohnut’ d’alej, aby sme tymsledovali realny opis systemu. Vseobecne, ak sa v case t nachadzame v bode [ϕ(t), pϕ(t)], potom Hamiltonoverovnice diktuju, kde budeme v case t+ dt (o kusok neskor):
ϕ =∂H
∂pϕ=⇒ dϕ =
∂H
∂pϕdt =⇒ ϕ(t+ dt) = ϕ(t) +
∂H
∂pϕdt
pϕ = −∂H∂ϕ
=⇒ dpϕ = −∂H∂ϕ
dt =⇒ pϕ(t+ dt) = pϕ(t)− ∂H
∂ϕdt
Rovnaku uvahu mozeme pouzit’ na prıpad, kedy by sme sa pytali, kde bol system v case t−dt, ak v caset (teraz) je v bode [ϕ(t), pϕ(t)]? Odpoved’ na tuto otazku sa skryva tiez v Hamiltonovych rovniciach a idevlastne o obratenie smeru casu, teda dt zamenıme za −dt a pozrieme sa, kde sme boli o kusok skor. To aleznamena, ze tvarom Hamiltonovych rovnıc a zadanymi pociatocnymi podmienkami je automaticky urcenatrajektoria vo fazovom priestore, po ktorej sa bude pohybovat’ suradnica ϕ a jej hybnost’ pϕ, pricom tatotrajektoria je parametrizovana casom6. Pre rozne pociatocne podmienky tak dostavame rozne krivky, ktoresa navzajom nepretınaju7. Kazda krivka opisuje mozne chovanie systemu pri nejakej konkretnej pociatocnejpodmienke, co budeme nazyvat’ fazovy, alebo Hamiltonovsky tok8. Ak do jedneho fazoveho priestoru za-kreslıme vel’a kriviek pre vel’a roznych pociatocnych podmienok, takyto obrazok sa nazyva fazovy portret.Uvedieme si dva nateraz zaujımave fazove portrety - jeden pre linearny harmonicky oscilator, druhy prerovinne matematicke kyvadlo.
Lagrangian linearneho harmonickeho oscilatora kmitajuceho v smere osi z bez posobenia inych sıl (napr.gravitacie) ma nasledovny tvar:
L(z) =1
2mz2 − 1
2kz2
Z toho vyplyva, ze Hamiltonian tejto sustavy bude:
H(z, p) =p2
2m+
1
2kz2
6Toto nie je t’azke si uvedomit’ - v kazdom case t mame totiz jednoznacne z pociatocnej podmienky urcenu hodnotu ϕ(t)a pϕ(t). To ale znamena, ze ked’ sa pohybujeme v case t, bod [ϕ(t), pϕ(t)] sa vo fazovom priestore pohybuje po istej krivke(urcenej prave Hamiltonovymi diferencialnymi rovnicami) - inak povedane, suradnica a jej hybnost’ sa pohybuju po krivkeparametrizovanej casom.
7Pre dve rozne pociatocne podmienky mozno dostat’ totozne trajektorie vo fazovom priestore. Co sa nemoze stat’, ze by sadve krivky pretınali, spajali, ani rozdel’ovali - musela by totiz nastat’ situacia, kedy sa bod z daneho miesta vo fazovom priestorepohne do viacerych smerov naraz, co vsak nie je mozne (pretoze tento smer je jednoznacne urceny Hamiltonovymi rovnicami vprıslusnom case t).
8Hamiltonian flux
50

3.2. FAZOVY PRIESTOR
Hamiltonove rovnice pre z a p:
z =p
m
p = −kz
Tieto rovnice sa daju nast’astie vyriesit’ analyticky pre p(z), z(p) (poprıpade implicitne9) nasledovnympostupom:
z =p
m=⇒ dz =
1
mp dt =⇒ dt =
mdz
p
p = −kz =⇒ dp = −k z dt =⇒ dt = − dp
k z
m dz
p= − dp
k z
/k z
m
k z dz = − 1
mp dp
/ ˆ1
2k z2 +
p2
2m= C
Pokusme sa interpretovat’ tento vysledok. Na l’avej strane mame vlastne sucet potencialnej energie akinetickej energie (tu ma zovseobecnena hybnost’ naozaj zmysel hybnosti p = m z). No tento sucet sa alerovna celkovej energii, teda integracna konstanta je vlastne celkova energia (a teraz vidıme, ze musı byt’
nezaporna):
1
2k z2 +
p2
2m= E0 ≥ 0
Za tychto podmienok teraz mozeme nakreslit’ fazovy portret vo fazovom priestore - na horizontalnu osnanesieme hodnoty z, na vertikalnu p. Je jasne, ze tento portret bude tvoreny sustrednymi elipsami, kdehlavna a vedl’ajsia os zavisia od tuhosti k, hmotnosti m a celkovej energie oscilatora E0. Toto E0 je nakonieclen skalovacı parameter (jeho zvacsenım/zmensenım sa zvacsı/zmensı cela elipsa, bezo zmeny pomeru dlzokhlavnej a vedl’ajsej poloosi).
9Implicitnym riesenım nazveme take, v ktorom nemame k dispozıcii priamo funkciu y = f(x), alebo x = f−1(y), no mamek dispozıcii implicitnu zavislost’ x a y urcenu nejakou funkciou F (x, y) nasledovne:
F (x, y) = 0
Ak bod (x0, y0) splna funkcnu zavislost’ F (x0, y0) = 0, za danych podmienok, o ktorych hovorı veta o implicitne zadanejfunkcii, existuje v okolı tohto bodu funkcna zavislost’ x(y), alebo y(x). Existencia este nehovorı nic o tom, ze by sme takufunkciu vedeli napısat’ explicitne.
51
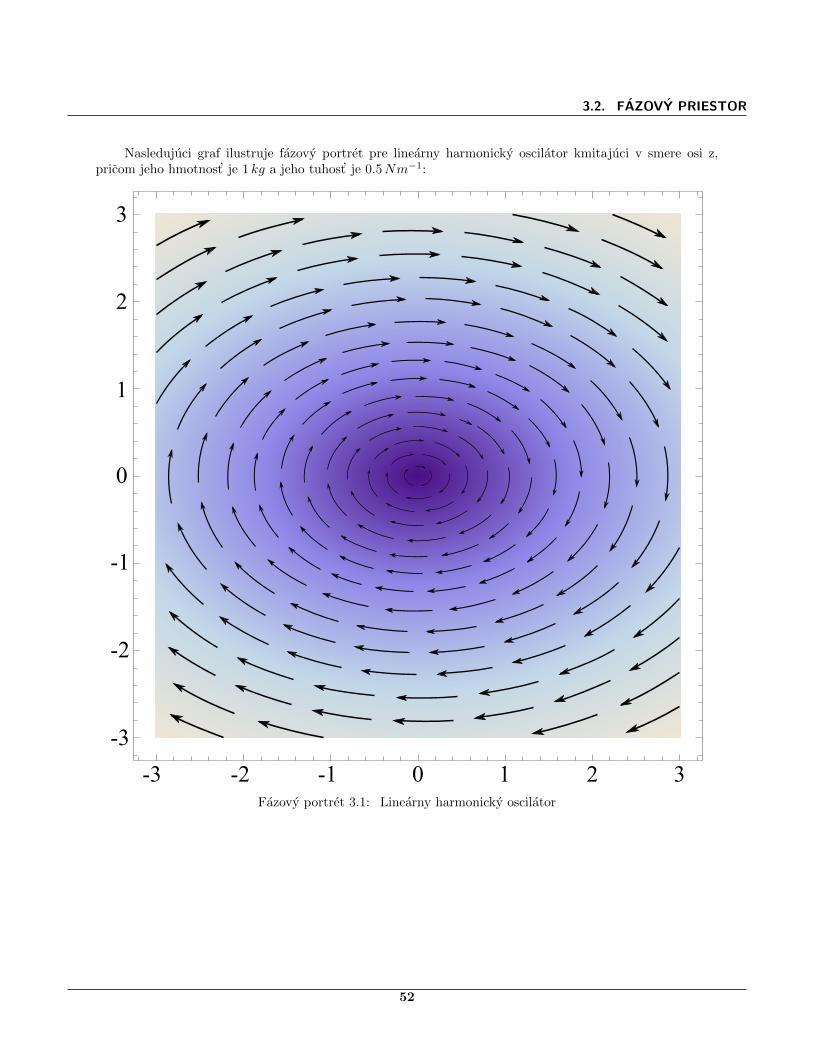
3.2. FAZOVY PRIESTOR
Nasledujuci graf ilustruje fazovy portret pre linearny harmonicky oscilator kmitajuci v smere osi z,pricom jeho hmotnost’ je 1 kg a jeho tuhost’ je 0.5Nm−1:
0
1
2
3
-1
-2
-3
-3 -2 -1 0 1 2 3Fazovy portret 3.1: Linearny harmonicky oscilator
52

3.2. FAZOVY PRIESTOR
Prvy prıklad, znazornenie fazoveho portretu pre linearny harmonicky oscilator, bol vel’mi jednoduchy,pretoze sustavu ktora ho opisuje, je mozne riesit’ analyticky. Mnohokrat sa stava, ze system, ktorehospravanie by sme radi poznali, nie je riesitel’ny analyticky v elementarnych funkciach, v niektorych prıpadochdokonca ani v kvadraturach10.
Druhy prıklad, rovinne matematicke kyvadlo, vieme riesit’ v kvadraturach. Problem je vsak v tom,ze neexistuje elementarna funkcia, ktora by tento pohyb opisovala. Pre ilustraciu tejto potiaze sa naozajpokusime riesit’ diferencialnu rovnicu rovinneho matematickeho kyvadla. Lagrangian tejto sustavy je:
L = T − U =1
2ml2ϕ2 +mgl cos(ϕ)
Vidıme, ze v nom explicitne nevystupuje cas, teda platı zakon zachovania energie:
E = T + U =1
2ml2ϕ2 −mgl cos(ϕ) = konst.
Rovnaky tvar by sme dostali, ak by sme upravovali rovnicu rovinneho matematickeho kyvadla:
ϕ+g
lsin(ϕ) = 0
/ϕ =
dϕ
dt
ϕϕ+g
lsin(ϕ)
dϕ
dt= 0
/ˆ· · · dt
Pocıtame oba integraly:
ˆϕϕdt
P.P.= ϕϕ−
ˆϕϕdt =⇒
ˆϕϕdt =
1
2ϕ2
ˆsin(ϕ)
dϕ
dtdt =
ˆsin(ϕ)dϕ = − cos(ϕ)
ˆϕϕdt+
g
l
ˆsin(ϕ)
dϕ
dtdt = C
1
2ϕ2 − g
lcos(ϕ) = C
/ml2
1
2ml2ϕ2 −mgl cos(ϕ) = Cml2 = konst.
1
2ml2ϕ2 −mgl cos(ϕ) = E (3.12)
Vidıme, ze sme dostali rovnaky tvar, ako zo zakona zachovania energie. Pod’me sa pozriet’ na riesenietejto rovnice.
10Riesit’ rovnicu v kvadraturach znamena najst’ integralne vyjadrenie pre ϕ(t) zadane implicitne:
ˆ ϕϕ0
f(ϕ′)dϕ′ =
ˆ tt0
g(τ)dτ,
kde tento tvar (pri moznom najdenı primitıvnej funkcie ku f ako F (ϕ) =´f(ϕ)dϕ a ku g G(t) =
´g(t)dt) implicitne zadava
tvar ϕ(t). Niekedy je mozne najst’ aj explicitny tvar:
F (ϕ)− F (ϕ0) = G(t)−G(0) =⇒ ϕ(t) = F−1 [G(t) + F (ϕ0)−G(0)]
Mnohokrat vsak rovnicu nevieme riesit’ v kvadraturach, co moze znamenat’, ze napr. nevieme separovat’ premenne. Druhyproblem sa skryva v samotnej integracii, no ak uz mame riesenie v kvadraturach, zvycajne sa to poklada za uspech. Integralytotiz mozno spol’ahlivymi metodami riesit’ numericky, kdezto hl’adat’ riesenie diferencialnych rovnıc (najma nelinearnych) jet’azsia uloha.
53

3.2. FAZOVY PRIESTOR
Vo fyzike byva zvykom, ze ziadnu rovnicu neriesime v takom tvare, v akom sme ju napısali (aj sfyzikalnymi konstantami a prıslusnymi rozmermi). Kazdu rovnica, ktoru chceme riesit’, je dobre priviest’
do bezrozmerneho tvaru - jednak samotne premenne, ktore su predmetom riesenia, budu mat’ bezrozmernytvar a taktiez rozne konstanty, ktore v nej vystupovali, sa vselijako sikovne zakryju. Budeme demonstrovat’
proces, ktorym privedieme rovnicu (3.12) na jej bezrozmerny tvar. Vychadzame zo zakona zachovania energiepre rovinne matematicke kyvadlo - dovod je ten, ze je to obycajna diferencialna rovnica prveho radu, co jeovel’a lepsie, ako mat’ rovnicu druheho radu (v skutocnosti clovek riesi radsej rovnice s cım mensım radom,co je aj dovod, preco su zakony zachovania tak obl’ubene a hojne vyuzıvane). Rovnicu napıseme tak, abynulova potencialna energia bola pre ϕ = 0, teda ked’ vol’ne visı:
1
2ml2ϕ2 +mgl [1− cos(ϕ)] = E
Vidıme, ze na pravej strane vystupuje celkova energia kyvadla. Prirodzenou snahou pri oddimenzionali-zovanı rovnice je prepısat’ dolezito vyzerajuce konstanty pomocou inych konstant, ktore v nej tiez vystupuju.Jeden z napadov, ktore moze clovek dostat’ ked’ sa pozrie na celkovu energiu E, ze ju vyjadrı pomocouhmotnosti m, gravitacneho zrychlenia g a dlzky kyvadla l. Skutocne, vyraz mgl ma jednotku energie a jeto vel’mi prirodzena konstanta vzhl’adom na situaciu, ktoru riesime. Kvoli tomu, aby neskor vysla rovnica vprıjemnejsom tvare, pouzijeme hodnotu 2mgl. Cela podstata tejto uvahy teda bude tkviet’ v nasledujucomvzt’ahu:
E = 2mglε
V tejto rovnici je zachytena myslienka, ze celkova energia sustavy (ktora je pri zadanych pociatocnychpodmienkach uz naveky konstantna) sa da vyjadrit’ ako nejaky realny (bezrozmerny) kladny nasobok po-tencialoveho rozdielu medzi spodnou a vrchnou polohou kyvadla. Dosad’me teda takto vyjadrenu energiudo rovnice:
1
2ml2ϕ2 +mgl [1− cos(ϕ)] = 2mglε
/1
2mgl
l
4gϕ2 +
1
2[1− cos(ϕ)] = ε
Teraz ocenıme, ze sme miesto E vzali 2mglε, platı totiz vzt’ah:
1
2[1− cos(ϕ)] = sin2
(ϕ2
)Clen
ϕ
2prirodzene najdeme aj v prvom vyraze na l’avej strane:
l
4gϕ2 =
l
g
(ϕ
2
)2
Prepıseme rovnicu pomocou polovicneho uhla ϕ:
l
g
(ϕ
2
)2
+ sin2(ϕ
2
)= ε
Natıska sa samozrejme prirodzena substitucia daneho polovicneho uhla:
ϕ
2= Φ =⇒ l
gΦ2 + sin2 (Φ) = ε (3.13)
54

3.2. FAZOVY PRIESTOR
V rovnici stale vystupuju konstanty g a l, avsak stale mame k dispozıcii este jeden sikovne skrytyparameter s rozmerom - cas. Naozaj, prvy clen obsahuje derivaciu podl’a casu a teda rozmer casu musı tiez vprvom clene vyskocit’. Znovu sa ponuka prirodzeny argument - moze existovat’ take T0 konstantne, ze potomakykol’vek casovy interval realneho casu t bude bezrozmernym nasobkom tohto T0. Inak zapısane:
t = T0 τ =⇒ dt = T0 dτ
Potom sa nam mierne upravı pravidlo pre derivovanie funkciı zavislych od t:
ξ =dξ
dt=
1
T0
dξ
dτ=
1
T0ξ′
Toto pravidlo spolu s danou substituciou pouzijeme v rovnici (3.13):
l
g
1
T 20
Φ′2 + sin2 (Φ) = ε
Okamzite vidıme celkom vhodny vyber konstanty T0 (co je takmer perioda malych kmitov kyvadla):
T0 =
√l
g=⇒ Φ′2 + sin2 (Φ) = ε (3.14)
Tato rovnica (po danych spatnych substituciach) opisuje rovinne matematicke kyvadlo, no matematickysa s nou pracuje ovel’a lepsie - nemusıme totiz rozmysl’at’, kol’ko je g, l, m a E tak, aby sme kreslili pekneobrazky. Substitucie tento problem vyriesili za nas. Rovnicu d’alej upravujeme:
Φ′2 = ε− sin2 (Φ)
Φ′2 = ε
[1− 1
εsin2 (Φ)
]
Φ′ =dΦ
dτ=√ε
√1− 1
εsin2 (Φ)
/dτ
√ε√
1− 1ε sin2 (Φ)
1√ε
dΦ√1− 1
ε sin2 (Φ)= dτ
/ˆ
1√ε
ˆdΦ√
1− 1ε sin2 (Φ)
=
ˆdτ
Mozeme si gratulovat’ - prave sa nam podarilo vyriesit’ rovnicu v kvadraturach, co vsak vobec neznamena,ze si jej riesenie vieme predstavit’ (v skutocnosti nam z tohto tvaru nie je zname takmer nic - ku vseobecnemurieseniu je este dlha cesta). Ukazeme vsak este omnoho viac, zavislost’ Φ(τ) vyjadrıme explicitne, no tieznam to vel’a nepovie. Kvoli explicitnemu vyjadreniu budeme musiet’ siahnut’ po nejakej matematickej knihes eliptickymi integralmi, kde najdeme nasledovnu definıciu11:ˆ
0
x
dt√1− k2 sin2 (t)
≡ F (x, k)
11http://mathworld.wolfram.com/JacobiEllipticFunctions.html
55

3.2. FAZOVY PRIESTOR
Prava strana nasej rovnice v kvadraturach tak bude rovna τ a l’ava bude vyjadritelna pomocou tejtofunkcie F12:
1
ε= k2
ˆdΦ√
1− 1ε sin2 (Φ)
= F
(Φ,
1√ε
)− F
(Φ0,
1√ε
)
F
(Φ,
1√ε
)=√ετ + F
(Φ0,
1√ε
)(3.15)
Dostali sme implicitne vyjadrenie Φ(t). Pre explicitne musıme poznat’ funkciu F−1, ktorou je Jacobiho
amplitudna funkcia, ktora splna (celkom logicku podmienku inverznosti funkcie)13:
u = F(Φ, k) =⇒ F−1(u, k) = Φ = am(u, k)
Nasa funkcia Φ(t) teda bude vyjadritel’na explicitne za pomoci Jacobiho amplitudnej funkcie v nasle-dovnom tvare:
u = F(Φ,1√ε
) =⇒ Φ(τ) = F−1(u,1√ε
)
Φ(τ) = am
[√ετ + F
(Φ0,
1√ε
),
1√ε
](3.16)
Ako iste vidıme, z tohto tvaru vlastne nic nevidıme. Z daneho vyjadrenia (aj ked’ explicitneho) smev skutocnosti zıskali vel’mi malo. Ak mame poruke dobry plotter grafov s implementovanymi eliptickymiintegralmi a ich inverznymi funkciami, mozeme si skusit’ dat’ vykreslit’ danu rovnicu pre rozne ε (co vel’mizasadne menı vyvoj pohybu kyvadla v case) a Φ0 (vyvoj kyvadla menı len okrajovo, v podstate vyjadrujepociatocnu polohu kyvadla). Ak taky plotter poruke nemame, tato rovnica nam nehovorı vobec nic. Bolo byteda dobre pouzit’ inu metodu, pomocou ktorej pohodlne nahliadneme do daneho systemu bez explicitnehoriesenia jeho rovnıc. Tou je prave kreslenie Hamiltonovskeho toku vo fazovom priestore (co je teraz celkomdobre mozne, vzhl’adom na to, ze jeho rozmer je 2).
12Volanej elipticky integral prveho druhu. Je vhodne poznamenat’, ze zapisov tejto funkcie existuje viac:
F(ϕ, k) = F(ϕ|k2) = F(sinϕ; k) =
ˆ ϕ0
dt√1− k2 sin2 t
13V tomto okamihu sa nebudeme zaujımat’, ci je, ako funkcia F(x, k), tak aj funkcia am prosta - postacı nam fakt, ze vyslednafunkcia am, napriek tomu, ze nie je (pre kazde k) injektıvna (prosta), dava dobre vysledky o priebehu otacania kyvadla vcase. Analogiu mozeme vidiet vo funkcii sınus a jej inverznej cyklometrickej funkcie arkus sınus. Sınus nie je prosta funkcia,napriek tomu sme schopnı riesit’ rovnicu linearneho harmonickeho oscilatora implicitne (najprv v kvadraturach a d’alej pomocouvypoctu integralu) v podobe:
arcsin
(x
x0
)= ωt =⇒ x(t) = x0 sin(ωt),
teda problemy s tym, ze by funkcia am (alebo sınus) nebola prosta, prısne vzate neberieme do uvahy. Koho by zaujımalidefinicne obory, ohl’adom funkcie F(x, k) rychlo vidıme, ze pre k > 1 je vyraz nedefinovany (komplexny) pre niektore x ∈ R(vidıme analogiu s funkciou arcsin, ktora nie je definovana pre |x| > 1). Naopak, funkcia am (bez dokazu), je pre k > 1periodicka, pre k = 1 neperiodicka, neparna, asymptoticky sa blıziaca k hodnote π
2a pre 0 < k < 1 neperiodicka, rastuca.
56

3.2. FAZOVY PRIESTOR
Otazkou teda je: ,,Ako riesit’ pohybove rovnice bez riesenia pohybovych rovnıc?”. Mohli by sme savratit’ ku Hamiltonovym rovniciam pre rovinne matematicke kyvadlo a skusit’ z nich pre rozne parametrezostrojit’ fazovy portret, no natıska sa lepsia moznost’. Mame totiz k dispozıcii bezrozmernu rovnicu (3.14):
Φ′2 + sin2 (Φ) = ε
Ked’ze zovseobecnena hybnost’ pre suradnicu ϕ je umerna ϕ, tak je mozne povedat’, ze Φ′ rovnako dobreposluzi namiesto zovseobecnenej hybnosti a Φ namiesto zovseobecnenej suradnice ϕ14. Na horizontalnu osteda budeme znacit’ suradnicu Φ, na vertikalnu Φ′. Este pripomenieme, ze situacia sa v uhle ϕ opakujes periodou 2π, v uhle Φ sa teda opakuje s periodou π. Situaciu si teraz rozdelıme na tri prıpady, pokvalitatıvnom vysetrenı vsetkych troch nakoniec nakreslıme aj fazovy portret.
Prvy prıpad, ε 1. Cım je vlastne tento prıpad taky zaujımavy? Podmienka ε 1 vlastne hovorı otom, ze energia oscilatora je vel’mi mala oproti potencialovemu rozdielu medzi najvyssım a najnizsım bodomdo ktoreho sa kyvadlo moze dostat’ (teraz sa nam skala, ktoru sme zaviedli na zaciatku, vel’mi hodı). Toale znamena, ze samotne kyvadlo sa pohybuje okolo spodnej hodnoty - ked’ze energie ma len tol’ko, aby saledva kyvalo okolo Φ = 0. Za tychto podmienok mozeme zanedbat’ nelinearnost’ funkcie sin(Φ) a nahradit’ jupriamo argumentom. Dostaneme:
Φ′2 + Φ2 = ε ( 1)
Tym sme vlastne dostali rovnicu kruznice s malym polomerom√ε. A presne taky pohyb bude kyvadlo
opisovat’ vo fazovom priestore. Nieco nam to napadne pripomına - linearny harmonicky oscilator. Naozaj,v prvom priblızenı malych kmitov je kyvadlo linearny harmonicky oscilator. Tento fakt sa da ukazat’ akoz rovnice (3.15), tak aj z (3.16). V rovnici (3.15) pouzijeme fakt, ze Φ 1, tym padom aj 0 < α < Φje zanedbatel’na oproti 1 a teda sin(α) mozeme zamenit’ za α a (z prıslusneho parametrickeho integralu)dostaneme:
1√ε
ˆ0
Φ
dα√1− 1
ε sin2 (α)≈ 1√
ε
ˆ0
Φ
dα√1− 1
εα2
=
ˆ0
Φ
dα√ε− α2
= arcsin
(Φ√ε
)= τ
Φ(τ) =√ε sin(τ) =⇒ Φ′(τ) =
√ε cos(τ) =⇒ Φ′2 + Φ2 = ε
Kto by si dal tu pracu a naozaj vykreslil funkciu am(√ετ, 1
ε
), dostal by podobny graf (tvarom naozaj
podobny funkcii sınus):
5 10 15 20
- 0.10
- 0.05
0.05
0.10Φ
τ
Graf funkcie 3.2: Φ(τ) pre ε = 0.01
14Komu by sa tato argumentacia nevidela, moze skusit’ doviest’ Hamiltonove rovnice do bezrozmerneho tvaru a zistı, ze to,co sme tvrdili v tejto argumentacii kvalitatıvne, bude zodpovedat’ skutocnosti. Ciel’om kreslenia fazoveho portretu nie je presneaj s jednotkami zaznacit’ skaly, na ktorych sa premenne pohybuju v oboch osiach, ale kvalitatıvne naznacit’ charakter pohybuv sustave.
57
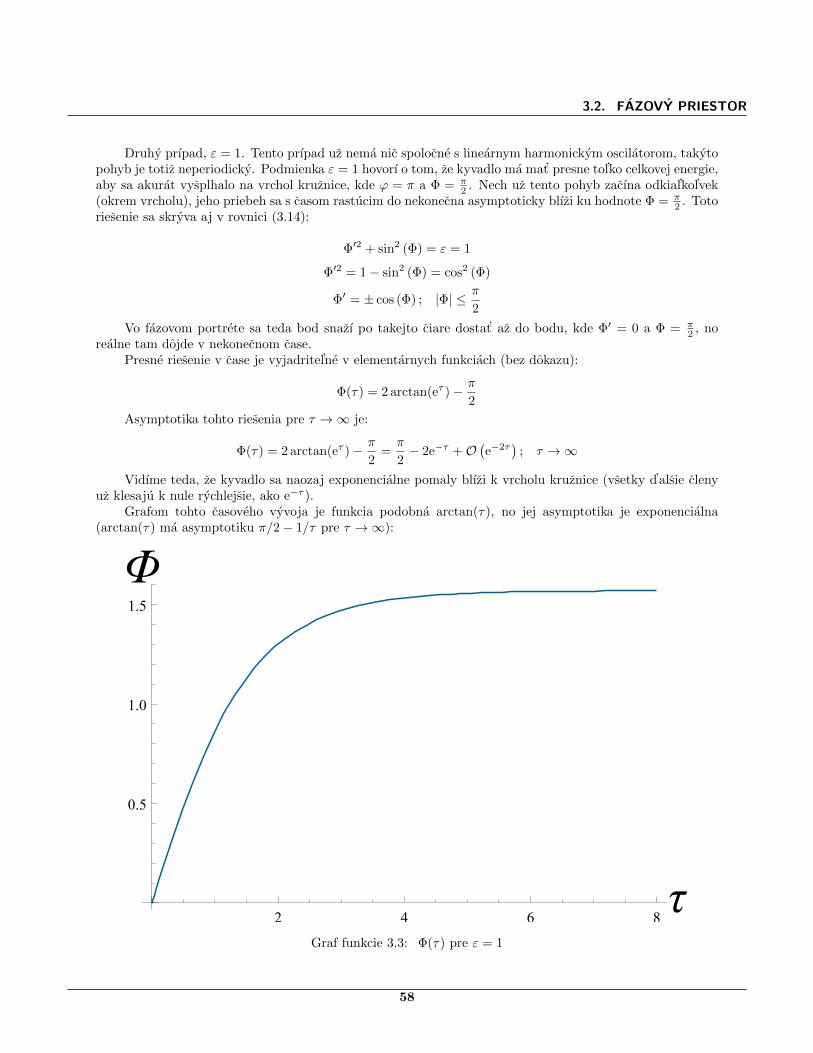
3.2. FAZOVY PRIESTOR
Druhy prıpad, ε = 1. Tento prıpad uz nema nic spolocne s linearnym harmonickym oscilatorom, takytopohyb je totiz neperiodicky. Podmienka ε = 1 hovorı o tom, ze kyvadlo ma mat’ presne tol’ko celkovej energie,aby sa akurat vysplhalo na vrchol kruznice, kde ϕ = π a Φ = π
2 . Nech uz tento pohyb zacına odkial’kol’vek(okrem vrcholu), jeho priebeh sa s casom rastucim do nekonecna asymptoticky blızi ku hodnote Φ = π
2 . Totoriesenie sa skryva aj v rovnici (3.14):
Φ′2 + sin2 (Φ) = ε = 1
Φ′2 = 1− sin2 (Φ) = cos2 (Φ)
Φ′ = ± cos (Φ) ; |Φ| ≤ π
2
Vo fazovom portrete sa teda bod snazı po takejto ciare dostat’ az do bodu, kde Φ′ = 0 a Φ = π2 , no
realne tam dojde v nekonecnom case.Presne riesenie v case je vyjadritel’ne v elementarnych funkciach (bez dokazu):
Φ(τ) = 2 arctan(eτ )− π
2
Asymptotika tohto riesenia pre τ →∞ je:
Φ(τ) = 2 arctan(eτ )− π
2=π
2− 2e−τ +O
(e−2τ
); τ →∞
Vidıme teda, ze kyvadlo sa naozaj exponencialne pomaly blızi k vrcholu kruznice (vsetky d’alsie clenyuz klesaju k nule rychlejsie, ako e−τ ).
Grafom tohto casoveho vyvoja je funkcia podobna arctan(τ), no jej asymptotika je exponencialna(arctan(τ) ma asymptotiku π/2− 1/τ pre τ →∞):
2 4 6 8
0.5
1.0
1.5
Φ
τ Graf funkcie 3.3: Φ(τ) pre ε = 1
58
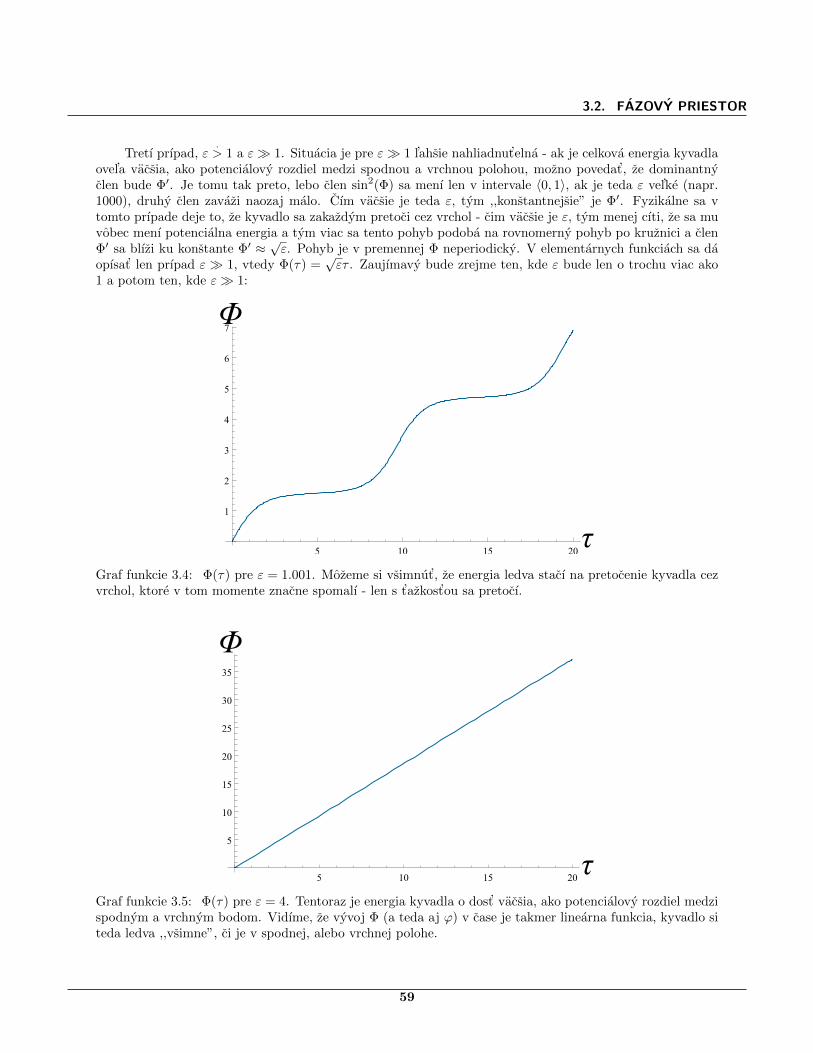
3.2. FAZOVY PRIESTOR
Tretı prıpad, ε.> 1 a ε 1. Situacia je pre ε 1 l’ahsie nahliadnut’elna - ak je celkova energia kyvadla
ovel’a vacsia, ako potencialovy rozdiel medzi spodnou a vrchnou polohou, mozno povedat’, ze dominantnyclen bude Φ′. Je tomu tak preto, lebo clen sin2(Φ) sa menı len v intervale 〈0, 1〉, ak je teda ε vel’ke (napr.1000), druhy clen zavazi naozaj malo. Cım vacsie je teda ε, tym ,,konstantnejsie” je Φ′. Fyzikalne sa vtomto prıpade deje to, ze kyvadlo sa zakazdym pretoci cez vrchol - cim vacsie je ε, tym menej cıti, ze sa muvobec menı potencialna energia a tym viac sa tento pohyb podoba na rovnomerny pohyb po kruznici a clenΦ′ sa blızi ku konstante Φ′ ≈
√ε. Pohyb je v premennej Φ neperiodicky. V elementarnych funkciach sa da
opısat’ len prıpad ε 1, vtedy Φ(τ) =√ετ . Zaujımavy bude zrejme ten, kde ε bude len o trochu viac ako
1 a potom ten, kde ε 1:
5 10 15 20
1
2
3
4
5
6
7Φ
τ
Graf funkcie 3.4: Φ(τ) pre ε = 1.001. Mozeme si vsimnut’, ze energia ledva stacı na pretocenie kyvadla cezvrchol, ktore v tom momente znacne spomalı - len s t’azkost’ou sa pretocı.
5 10 15 20
5
10
15
20
25
30
35
Φ
τ
Graf funkcie 3.5: Φ(τ) pre ε = 4. Tentoraz je energia kyvadla o dost’ vacsia, ako potencialovy rozdiel medzispodnym a vrchnym bodom. Vidıme, ze vyvoj Φ (a teda aj ϕ) v case je takmer linearna funkcia, kyvadlo siteda ledva ,,vsimne”, ci je v spodnej, alebo vrchnej polohe.
59
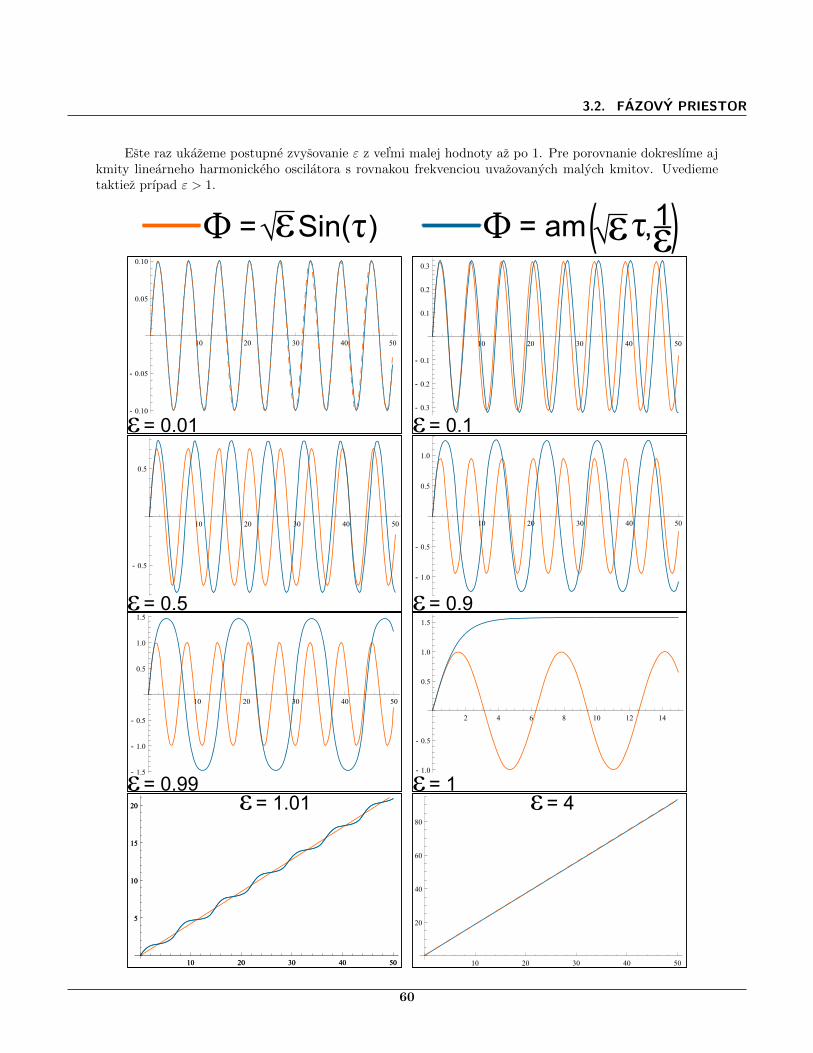
3.2. FAZOVY PRIESTOR
Este raz ukazeme postupne zvysovanie ε z vel’mi malej hodnoty az po 1. Pre porovnanie dokreslıme ajkmity linearneho harmonickeho oscilatora s rovnakou frekvenciou uvazovanych malych kmitov. Uvediemetaktiez prıpad ε > 1.
10 20 30 40 50
- 0.10
- 0.05
0.05
0.10
10 20 30 40 50
- 0.3
- 0.2
- 0.1
0.1
0.2
0.3
= Sin( )ε√ = am , ε√ ( )1_ε
ε = 0.01 ε = 0.1
10 20 30 40 50
- 0.5
0.5
ε = 0.5
10 20 30 40 50
- 1.0
- 0.5
0.5
1.0
ε = 0.9
ε = 0.99 ε = 1
10 20 30 40 50
5
10
15
20 ε = 1.01
10 20 30 40 50
20
40
60
80
ε = 4
10 20 30 40 50
- 1.5
- 1.0
- 0.5
0.5
1.0
1.5
10 20 30 40 50
5
10
15
20
60
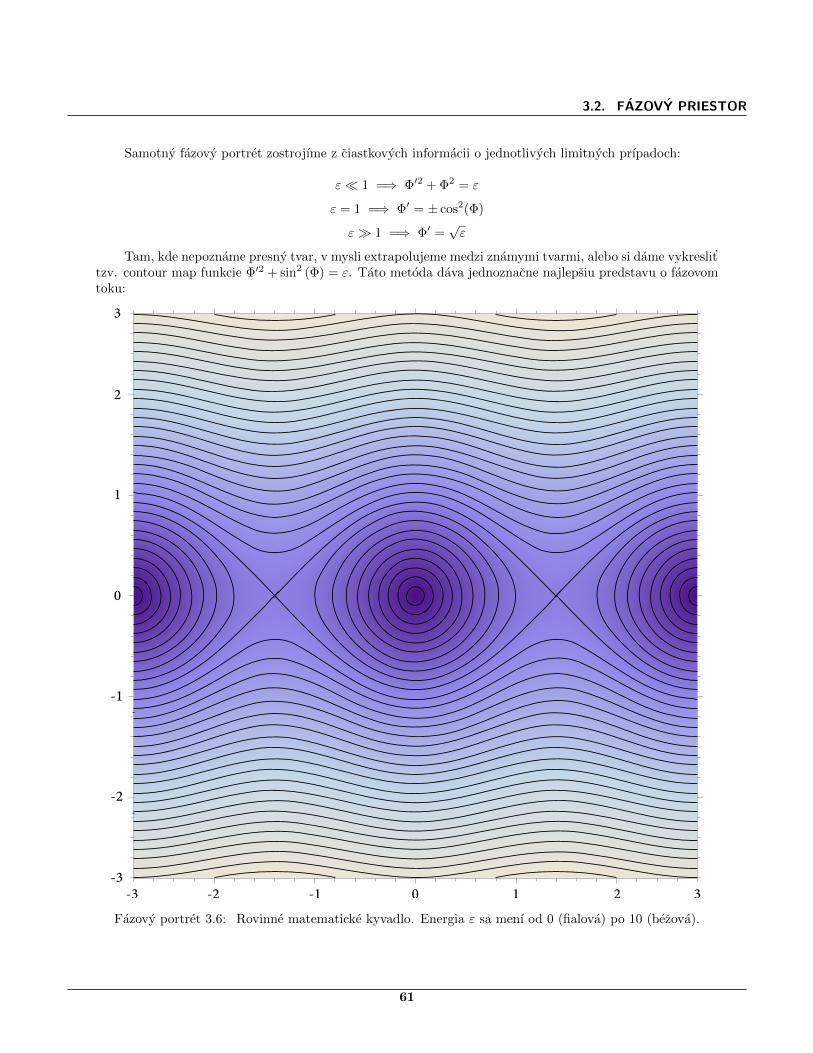
3.2. FAZOVY PRIESTOR
Samotny fazovy portret zostrojıme z ciastkovych informacii o jednotlivych limitnych prıpadoch:
ε 1 =⇒ Φ′2 + Φ2 = ε
ε = 1 =⇒ Φ′ = ± cos2(Φ)
ε 1 =⇒ Φ′ =√ε
Tam, kde nepozname presny tvar, v mysli extrapolujeme medzi znamymi tvarmi, alebo si dame vykreslit’
tzv. contour map funkcie Φ′2 + sin2 (Φ) = ε. Tato metoda dava jednoznacne najlepsiu predstavu o fazovomtoku:
-2
0
-1
1
2
3
-3-3 -2 -1 0 1 2 3
Fazovy portret 3.6: Rovinne matematicke kyvadlo. Energia ε sa menı od 0 (fialova) po 10 (bezova).
61
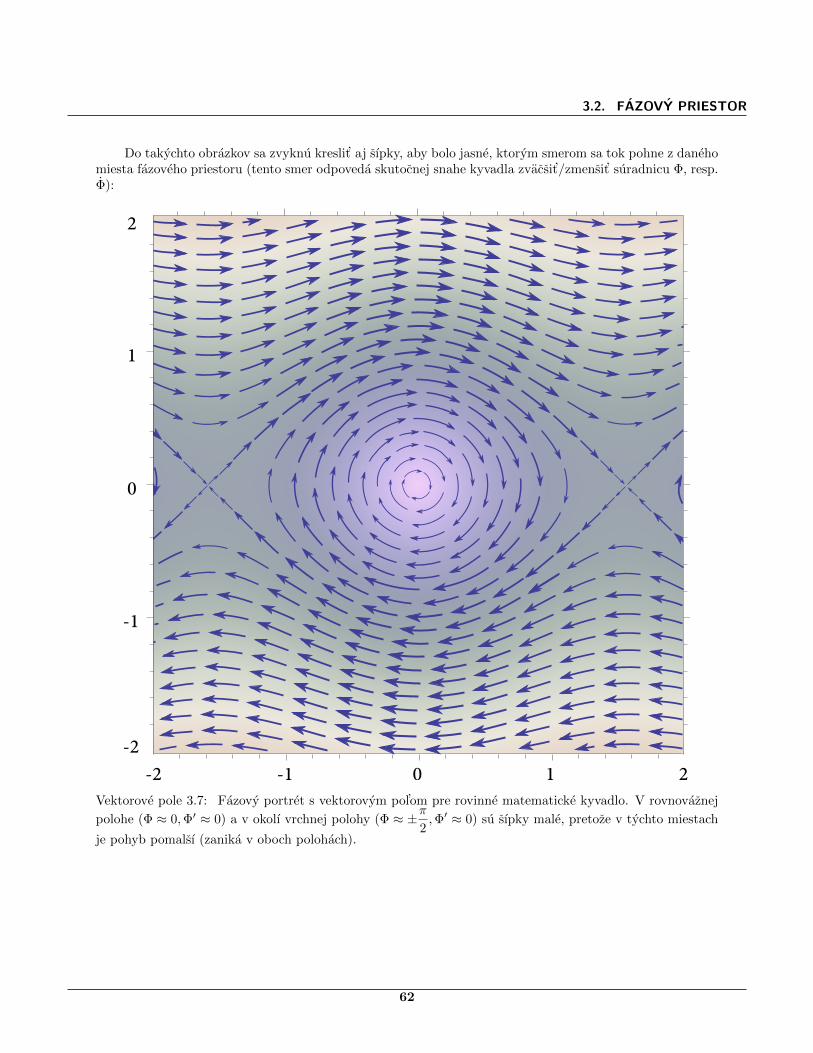
3.2. FAZOVY PRIESTOR
Do takychto obrazkov sa zvyknu kreslit’ aj sıpky, aby bolo jasne, ktorym smerom sa tok pohne z danehomiesta fazoveho priestoru (tento smer odpoveda skutocnej snahe kyvadla zvacsit’/zmensit’ suradnicu Φ, resp.Φ):
-2 -1 0 1 2-2
0
-1
1
2
Vektorove pole 3.7: Fazovy portret s vektorovym pol’om pre rovinne matematicke kyvadlo. V rovnovaznej
polohe (Φ ≈ 0,Φ′ ≈ 0) a v okolı vrchnej polohy (Φ ≈ ±π2,Φ′ ≈ 0) su sıpky male, pretoze v tychto miestach
je pohyb pomalsı (zanika v oboch polohach).
62

3.2. FAZOVY PRIESTOR
3.2.2 Liouvilleova veta*
Majme fazovy priestor, ktory budeme symbolicky znacit’ v dvoch rozmeroch (no veta platı vseobecne).V tomto priestore sa pohybuju suradnice q a hybnosti p k nim prisluchajuce, ktorych pohyb v case sariadi Hamiltonianom H. Na zaciatku (t = 0) si vyberieme mysleny objem V vo fazovom priestore (tedazapıseme mnozinu vsetkych pociatocnych stavov, ktore do tohto objemu v case t = 0 patria, cım dany objemdefinujeme). Tento objem oznacıme D(0) a pocıtame ho ako nasobny integral cez tento objem z funkcie 1(teda ako mieru danej oblasti):
D(0) =
ˆD(0)
dq1 · · · dqn︸ ︷︷ ︸=dnq
dp1 · · · dpn︸ ︷︷ ︸=dnp
(3.17)
Ked’ sa teraz pohneme v case do vseobecneho momentu t, aj suradnice a hybnosti sa vo vseobecnostinejako pohnu, no stale budu vo fazovom priestore tvorit’ objem (ktory tentoraz definujeme tak, ze suradnice,ktore si pamatame uz z casu t = 0, budeme hl’adat’ po celom priestore a ked’ ich najdeme, tak priestor,ktory budu zaplnat’ budeme povazovat’ za objem, o ktorom je momentalne rec) D(t). Obdobnym sposobompocıtame objem D(t):
D(t) =
ˆD(t)
dnq dnp (3.18)
Platı veta (Liouvilleova):
D(t) = D(0) (3.19)
Dokaz: v integraloch, ktore definuju rovnicu (3.19) integrujeme jednotkovu funkciu, teda dolezita budezrejme len zmena suradnıc v dosledku posunu v case. Budeme uvazovat’ infinitesimalny posun v case.Suradnice q a p sa transformuju z casu t do casu t+ dt.
(q1(t), . . . , qn(t), p1(t), . . . , pn(t)
)→(q1(t+ dt), . . . , qn(t+ dt), p1(t+ dt), . . . , pn(t+ dt)
)(3.20)
Z Hamiltonovych rovnıc dostavame (pre male dt):
qi → qi + qidt = qi +∂H
∂pidt = q′i
pi → pi + pidt = pi −∂H
∂qidt = p′i
(3.21)
Cela veta zrejme bude stat’ a padat’ na transformacii objemoveho elementu za cas dt. Element satransformuje podl’a vzt’ahu znameho uz z matematickej analyzy:
dV (t+ dt) = JdV (t) (3.22)
63
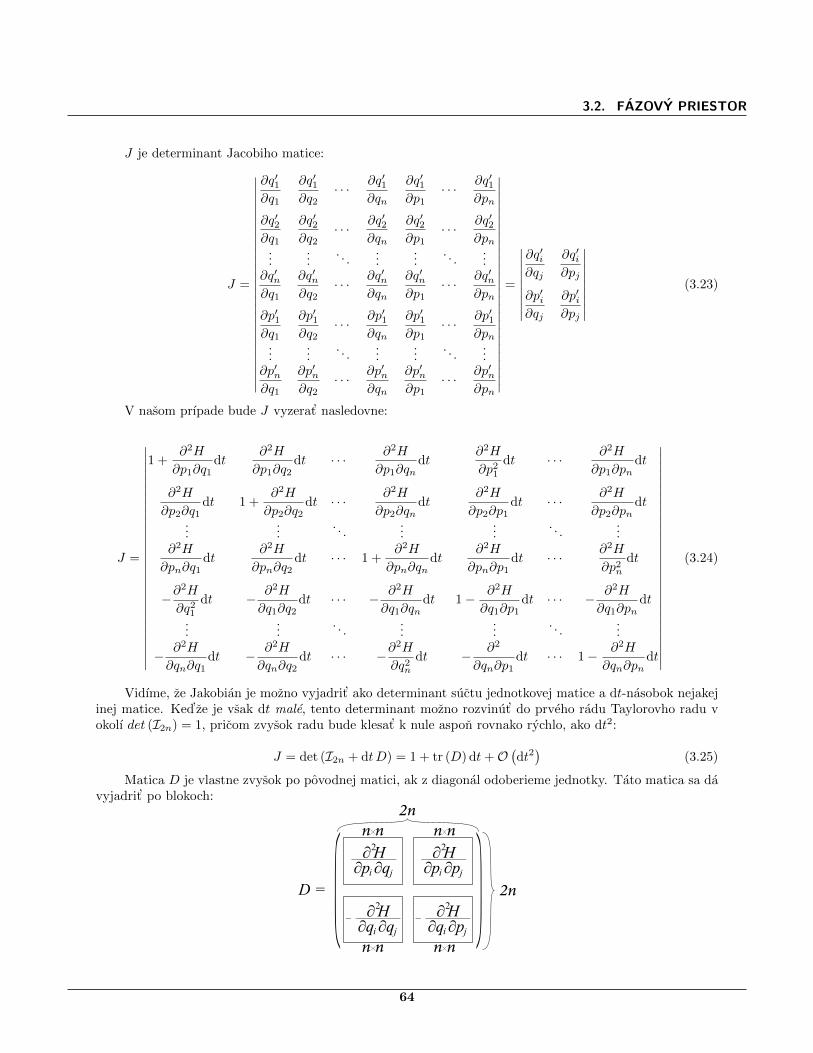
3.2. FAZOVY PRIESTOR
J je determinant Jacobiho matice:
J =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
∂q′1∂q1
∂q′1∂q2
· · · ∂q′1∂qn
∂q′1∂p1
· · · ∂q′1∂pn
∂q′2∂q1
∂q′2∂q2
· · · ∂q′2∂qn
∂q′2∂p1
· · · ∂q′2∂pn
......
. . ....
.... . .
...∂q′n∂q1
∂q′n∂q2
· · · ∂q′n∂qn
∂q′n∂p1
· · · ∂q′n∂pn
∂p′1∂q1
∂p′1∂q2
· · · ∂p′1∂qn
∂p′1∂p1
· · · ∂p′1∂pn
......
. . ....
.... . .
...∂p′n∂q1
∂p′n∂q2
· · · ∂p′n∂qn
∂p′n∂p1
· · · ∂p′n∂pn
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∂q′i∂qj
∂q′i∂pj
∂p′i∂qj
∂p′i∂pj
∣∣∣∣∣∣∣∣∣ (3.23)
V nasom prıpade bude J vyzerat’ nasledovne:
J =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 +∂2H
∂p1∂q1dt
∂2H
∂p1∂q2dt · · · ∂2H
∂p1∂qndt
∂2H
∂p21
dt · · · ∂2H
∂p1∂pndt
∂2H
∂p2∂q1dt 1 +
∂2H
∂p2∂q2dt · · · ∂2H
∂p2∂qndt
∂2H
∂p2∂p1dt · · · ∂2H
∂p2∂pndt
......
. . ....
.... . .
...∂2H
∂pn∂q1dt
∂2H
∂pn∂q2dt · · · 1 +
∂2H
∂pn∂qndt
∂2H
∂pn∂p1dt · · · ∂2H
∂p2n
dt
−∂2H
∂q21
dt − ∂2H
∂q1∂q2dt · · · − ∂2H
∂q1∂qndt 1− ∂2H
∂q1∂p1dt · · · − ∂2H
∂q1∂pndt
......
. . ....
.... . .
...
− ∂2H
∂qn∂q1dt − ∂2H
∂qn∂q2dt · · · −∂
2H
∂q2n
dt − ∂2
∂qn∂p1dt · · · 1− ∂2H
∂qn∂pndt
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
(3.24)
Vidıme, ze Jakobian je mozno vyjadrit’ ako determinant suctu jednotkovej matice a dt-nasobok nejakejinej matice. Ked’ze je vsak dt male, tento determinant mozno rozvinut’ do prveho radu Taylorovho radu vokolı det (I2n) = 1, pricom zvysok radu bude klesat’ k nule aspon rovnako rychlo, ako dt2:
J = det (I2n + dtD) = 1 + tr (D) dt+O(dt2)
(3.25)
Matica D je vlastne zvysok po povodnej matici, ak z diagonal odoberieme jednotky. Tato matica sa davyjadrit’ po blokoch:
D =
∂H
∂p ∂q
2
i j
_ ∂H
∂p ∂p
2
i j
_
∂H
∂q ∂q
2
i j
_ ∂H
∂q ∂p
2
i j
__ _
n n n n
n n n n
2n
2n
64

3.2. FAZOVY PRIESTOR
Stopa matice je sucet jej diagonalnych prvkov, v tomto prıpade zoberieme len diagonalne bloky a z nichpolozenım i = j a vysumovanım cez prıslusny sumacny index dostaneme jej stopu:
tr (D) =∂2H
∂pi∂qi− ∂2H
∂qi∂pi≡ 0 (3.26)
Tento vyraz je identicky rovny nule, pretoze predpokladame spojitost’ druhej zmiesanej parcialnej de-rivacie Hamiltonianu podl’a zovseobecnenej suradnice a prıslusnej zovseobecnenej hybnosti (a teda tietoderivacie sa po zamene poradia rovnaju). Pre Jakobian teda dostavame:
J = det (I2n + dtD) = 1 + tr (D) dt+O(dt2)
= 1 +O(dt2)
(3.27)
To pre zmenu Jakobianu znamena:
δJ = O(dt2)
(3.28)
A pre casovu derivaciu jej nulovost’:
J = limdt→0
dJ
dt= lim
dt→0O (dt) = 0 (3.29)
Vidıme, ze ak sa z casu t posunieme do casu t+ dt, Jakobian transformacie suradnıc sa zmenı najskoraz v druhom rade v dt a to platı v kazdom case t. Lenze to znamena, ze Jakobian sa v case nemenı (J = 0),teda sa nemenı ani objem D(t).
Liouvilleovu vetu budeme demonstrovat’ na rovinnom matematickom kyvadle. V jeho fazovom priestoresi na zaciatku vyberieme mnozinu bodov (zaciatocnych stavov), ktore budeme d’alej sledovat’ v case. Tvartejto mnoziny v kazdom d’alsom case urcuje vyber zaciatocnych stavov a samozrejme aj tvar potencialnejenergie. Pre kvadraticky potencial, co je obycajny linearny harmonicky oscilator, nenastava nic zaujımave.Frekvencia jeho kmitov totizto nezavisı od zaciatocnych podmienok (az na prıpad nulovej energie, co jeoscilator naveky sediaci v pociatku). Teda nech by sme do jeho fazoveho priestoru rozhodili akokol’vek suboroscilatorov, tento subor bude kruzit’ dookola a jeho tvar ostane nezmeneny.
V prıpade kyvadla je situacia ovel’a zaujımavejsia: pre ε 1 (teda vsetky oscilatory rozhadzane blızkoΦ = 0 a Φ′ = 0) by sme ocakavali, ze bude (aspon isty cas) este dobre splnena linearnost’ kmitov, t.j., ze ichfrekvencia nezavisı prılis od vychylky. V casovom vyvoji suboru oscilatorov sa tato takmer-linearita prejavınie prılisnym rozmazavanım suboru, no iste rozmazanie po dostatocne dlhom case prıst’ musı.
Pokial’ bude nas pociatocny subor zahrnat’ aj energie blızke, dokonca rovne kritickej energii ε = 1),budeme pozorovat’ znacnu deformaciu tvaru tohto suboru. Perioda kmitu kyvadla totiz rastie do nekonecna sε→ 1. Pre ε = 1 dokonca analyticky vieme, ze casovy vyvoj kyvadla sa exponencialne blızi ku vrchnej polohe,no to znamena, ze takyto pociatocny stav skoncı limitne v nekonecnom case v bode (π/2, 0). Ocakavameteda, ze kym energie blızke nule budu poslusne kruzit’ dookola, energie blızke 1 budu znacne zaostavat’, couz po relatıvne kratkom case sposobı rozmazanie suboru oscilatorov.
Vel’mi zaujımavy prıpad je, ak subor na zaciatku obsahuje rozne energie - aj mensie, aj vacsie ako 1.Vieme, ze pre ε > 1 je pohyb neperiodicky a vo fazovom priestore uteka donekonecna doprava (poprıpadedol’ava pre Φ′ < 0), kym pre ε < 1 ostava pohyb ohraniceny v periodickej oblasti. To ale znamena, ze kymcast’ oscilatorov ostava kruzit’ okolo stredu, ich druha cast’ v case stale uteka prec. Intuitıvne by sa zdalo, zesa takyto subor (aj ked’ na zaciatku tvoriaci spojitu oblast’) musı nutne roztrhnut’, no nie je tomu tak, akouvidıme.
Na nasledujucich stranach demonstrujeme tieto prıpady a pripomıname, ze podl’a Liouvilleovej vety suvsetky oblasti konstantne co do plochy (bez ohl’adu na exoticky vyvoj ich tvaru v case).
65
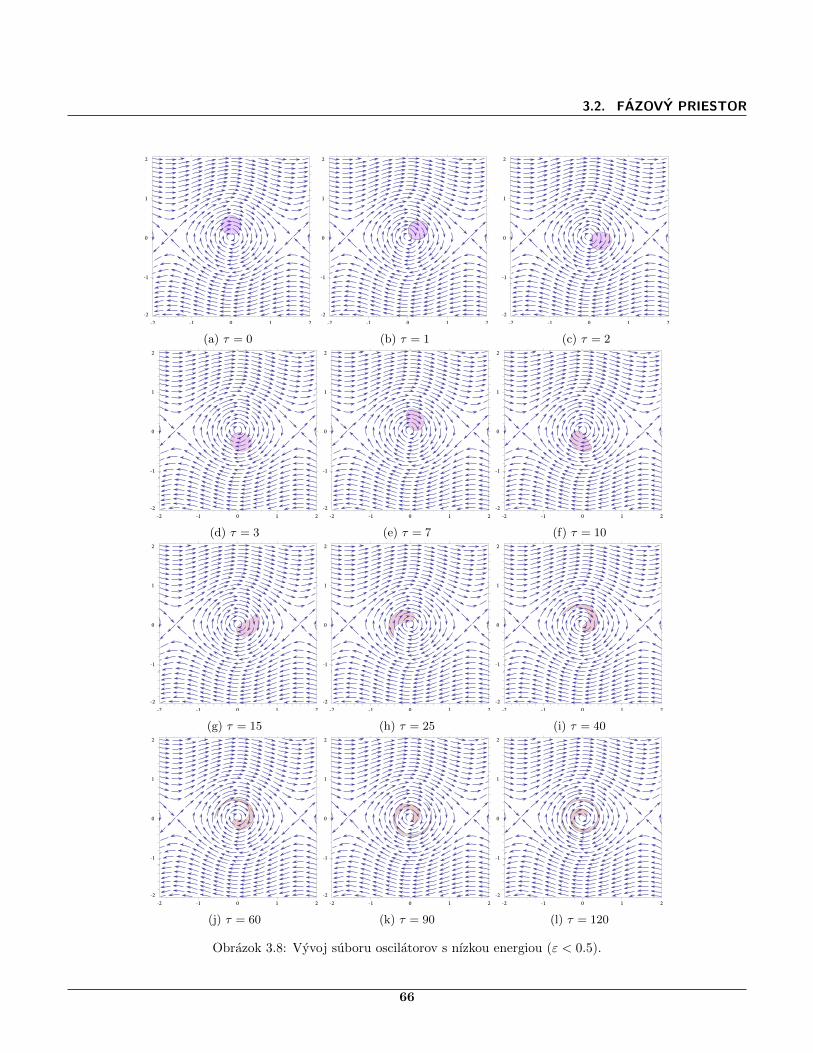
3.2. FAZOVY PRIESTOR
-2 -1 0 1 2-2
0
-1
1
2
(a) τ = 0
-2 -1 0 1 2-2
0
-1
1
2
(b) τ = 1
-2 -1 0 1 2-2
0
-1
1
2
(c) τ = 2
-2 -1 0 1 2-2
0
-1
1
2
(d) τ = 3
-2 -1 0 1 2-2
0
-1
1
2
(e) τ = 7
-2 -1 0 1 2-2
0
-1
1
2
(f) τ = 10
-2 -1 0 1 2-2
0
-1
1
2
(g) τ = 15
-2 -1 0 1 2-2
0
-1
1
2
(h) τ = 25
-2 -1 0 1 2-2
0
-1
1
2
(i) τ = 40
-2 -1 0 1 2-2
0
-1
1
2
(j) τ = 60
-2 -1 0 1 2-2
0
-1
1
2
(k) τ = 90
-2 -1 0 1 2-2
0
-1
1
2
(l) τ = 120
Obrazok 3.8: Vyvoj suboru oscilatorov s nızkou energiou (ε < 0.5).
66
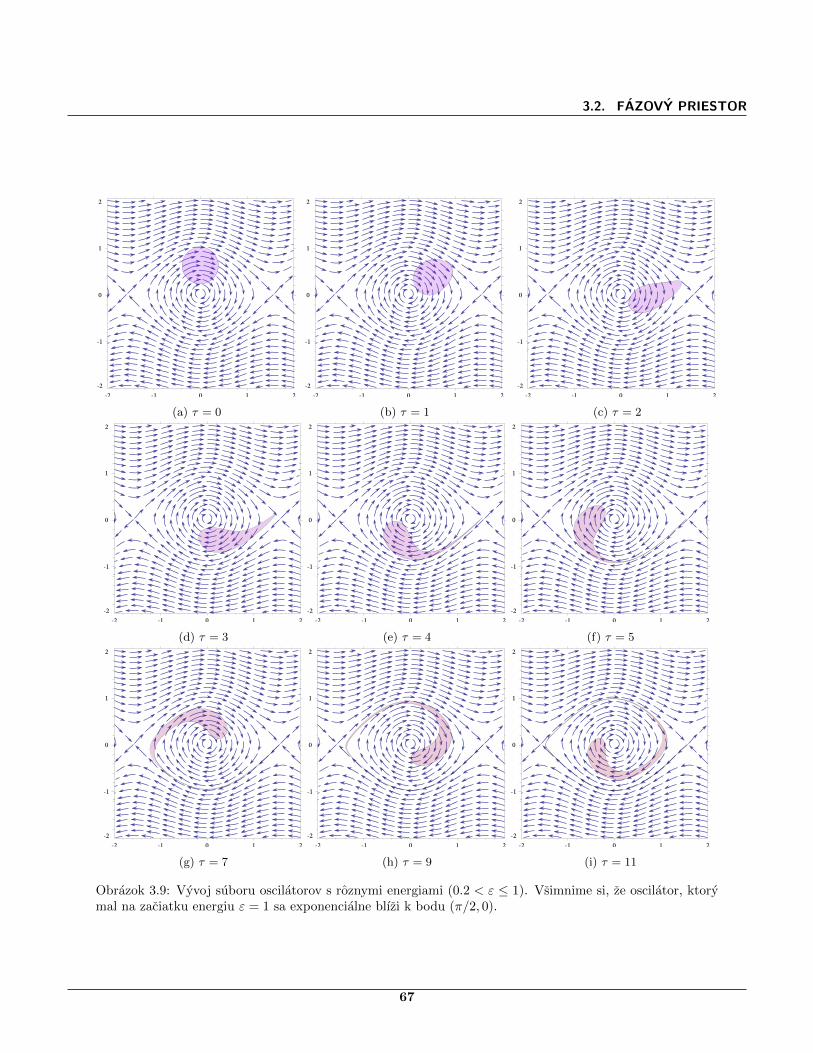
3.2. FAZOVY PRIESTOR
-2 -1 0 1 2-2
0
-1
1
2
(a) τ = 0
-2 -1 0 1 2-2
0
-1
1
2
(b) τ = 1
-2 -1 0 1 2-2
0
-1
1
2
(c) τ = 2
-2 -1 0 1 2-2
0
-1
1
2
(d) τ = 3
-2 -1 0 1 2-2
0
-1
1
2
(e) τ = 4
-2 -1 0 1 2-2
0
-1
1
2
(f) τ = 5
-2 -1 0 1 2-2
0
-1
1
2
(g) τ = 7
-2 -1 0 1 2-2
0
-1
1
2
(h) τ = 9
-2 -1 0 1 2-2
0
-1
1
2
(i) τ = 11
Obrazok 3.9: Vyvoj suboru oscilatorov s roznymi energiami (0.2 < ε ≤ 1). Vsimnime si, ze oscilator, ktorymal na zaciatku energiu ε = 1 sa exponencialne blızi k bodu (π/2, 0).
67
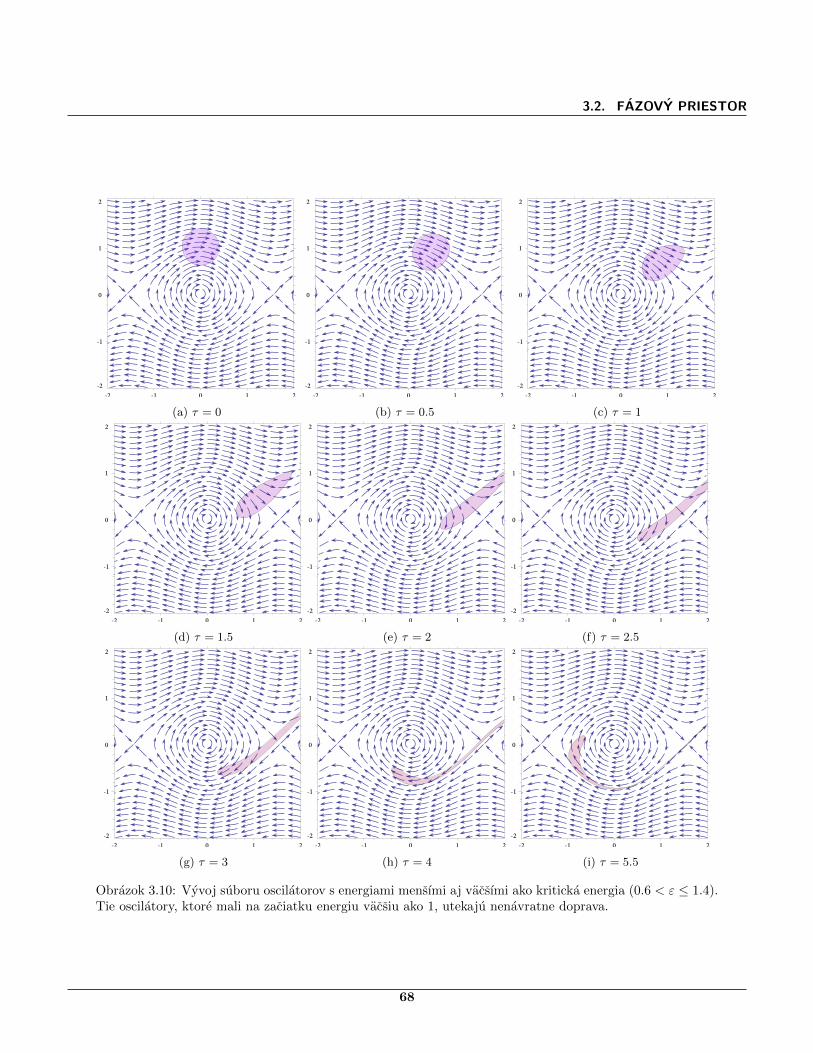
3.2. FAZOVY PRIESTOR
-2 -1 0 1 2-2
0
-1
1
2
(a) τ = 0
-2 -1 0 1 2-2
0
-1
1
2
(b) τ = 0.5
-2 -1 0 1 2-2
0
-1
1
2
(c) τ = 1
-2 -1 0 1 2-2
0
-1
1
2
(d) τ = 1.5
-2 -1 0 1 2-2
0
-1
1
2
(e) τ = 2
-2 -1 0 1 2-2
0
-1
1
2
(f) τ = 2.5
-2 -1 0 1 2-2
0
-1
1
2
(g) τ = 3
-2 -1 0 1 2-2
0
-1
1
2
(h) τ = 4
-2 -1 0 1 2-2
0
-1
1
2
(i) τ = 5.5
Obrazok 3.10: Vyvoj suboru oscilatorov s energiami mensımi aj vacsımi ako kriticka energia (0.6 < ε ≤ 1.4).Tie oscilatory, ktore mali na zaciatku energiu vacsiu ako 1, utekaju nenavratne doprava.
68

3.3. SKALOVANIE
3.3 Skalovanie
Skalovanie velicın je proces, pri ktorom zist’ujeme, ci a akym sposobom mozno zmenit’ skaly danehoprocesu (casove, dlzkove, ...). K vysledku mozno dospiet’ z pohybovych rovnıc, z Lagrangianu a samozrejme,aj z riesenia (no skalovanie castokrat funguje aj bez explicitneho vyriesenia danych rovnıc). Vezmime sinapr. pohybovu rovnicu vol’neho padu v gravitacnom poli:
z(t) + g = 0 (3.30)
Tvarme sa, ze stojıme na Mesiaci. Chceme dat’ do suvisu casove a dlzkove skaly padajuceho telesa vterajsej situacii s tymi, ktore pozname z podmienok znamych na Zemi. Myslıme tym nasledujuce vzt’ahymedzi fyzikalnymi velicinami na Mesiaci (z, t, g) s tymi na Zemi (Z, T , g0).
z = aZ
t = bT
g = cg0
(3.31)
Nasim ciel’om bude prepısat’ rovnicu (3.30) na totoznu rovnicu pre premenne Z a T a parameter g0.Oznacme aZ(T ) ≡ z(t). V takom prıpade bude pre druhu derivaciu Z podl’a t platit’:
z(t) = aZ(T ) =⇒ d2z(t)
dt2= a
d2Z(T )
dt= a
d2Z(T )
dT 2
d2T
dt2=
a
b2
??
Z(T ) (3.32)
a
b2
??
Z(T ) + cg0 = 0 (3.33)
Pre pad telesa na Zemi musı platit’ rovnica rovnakeho tvaru ako (3.30), ibaze v premennych Z, T a skonstantou g0. Rovnicu (3.33) teda upravujeme dovtedy, kym nedostaneme podmienku na konstanty a, b ac:
a
b2
(??
Z(T ) +b2c
ag0
)= 0 (3.34)
Kym konstanta pred zatvorkou rieseniu rovnice nevadı (pretoze ju mozeme vykratit’ z rovnice), konstantanasobiaca g0 musı byt’ rovna jednej, z coho dostaneme podmienku na skalovanie samotneho casu padu:
b2c
a= 1 =⇒ b =
√a
c(3.35)
Vysledok zodpoveda intuitıvnej predstave: pri pustenı telesa z a-krat vacsej vysky v c-krat silnejsomgravitacnom poli bude cas padu trvat’
√a/c dlhsie.
Teraz sa pozrime na Newtonov gravitacny zakon:
m~r = −κmM~r
r3;
m
M 1
Vieme, ze pre planety v Slnecnej sustave je riesenie ~r(t) periodicke. Podobne ako v predoslom prıklade
preskalujme dlzky a cas:
~r(t)→ a~r
(t
b
)= ~R(t)
~r =a
b2~r = −κMa~r
a3r3=⇒ a3
b2= 1 =⇒ b = a3/2
69

3.3. SKALOVANIE
To, co sme dostali vyzera, ako Keplerov zakon; ak preskalujeme dlzky obehu planety okolo slnka a-krat,potom doby (teda aj obezna doba) vystupujuce v pohybe sa preskaluju ako a3/2:
L→ aL =⇒ T → a3/2T
Keplerov zakon hovorı, ze pomer tretıch mocnın hlavnych poloosı a druhych mocnın obeznych dobplanet je konstanta. Z tejto analyzy by sa mohlo zdat’, ze sme prave vel’mi lacno odvodili Keplerov zakon.Nie je vsak tomu tak. Keplerov zakon v skutocnosti hovorı viac. Vo svojom zakone sa vyjadruje ku vsetkymplanetam Slnecnej sustavy, kdezto nasa analyza sa vyjadrila len k takym tvarom trajektorıi, ktore su sipodobne (tj zoberiem lupu a na cely prıpad sa pozriem zvacsene). Keplerovo pozorovanie sa tykalo ajplanet, ktore nemaju podobne drahy (v zmysle rovnakej vystrednosti), teda je vseobecnejsie ako to, co smeprave ukazali.
Teraz si ukazeme, ze aj skalovanie Lagrangianu sa niekedy ukaze byt’ uzitocne. Najprv si uvedomıme,ze ak nejakym postupom sposobıme, ze Lagrangian dostaneme prenasobeny nenulovou konstantou, vlastnesme nic hrozne neurobili - Lagrangeove rovnice sa tym nezmenia (pretoze v nich mozeme tuto konstantuvykratit’. Tato poznamka platı len pre potencialove sily):
L→ λL =⇒ Lagrangeove rovnice sa nezmenia
Tento princıp si demonstrujeme na rovnakom prıklade vol’neho padu, ktoreho Lagrangian vyzera nasle-dovne:
L (z, z) =1
2mz2 −mgz
z(t) = aZ (T ) , t = bT
1
2mz2 −mgz =
1
2
(a
b
?
Z
)2
−mg(aZ)
T = U − L→(ab
)2
T − aU =(ab
)2
︸ ︷︷ ︸nevadı
(T − b2
a︸︷︷︸vadı
U
)= λ(T − U)⇔ b2
a= 1
Vidıme, ze sme sa dopracovali k tomu istemu vysledku, ako predtym (pre jednoduchost’ sme uz gravitacnezrychlenie neskalovali).
Prıklad: predpokladajme, ze doba obehu Mesiaca okolo Zeme je presne jeden mesiac. Ako d’aleko odZeme musı obiehat’ druzica s dobou obehu 1 den, ak Mesiac obieha vo vzdialenosti lm? Podl’a prıkladu zoskalovania Newtonovho gravitacneho zakona vieme:
l3m
(30dnı)2 =
l3d(1den)
2 =⇒ l3d = l3m1
900≈ l3m
1
1000=
(lm10
)3
Prıklad: skalovanie kyvadla. Pracujme s Lagrangianom kyvadla a pozrime sa, ci vieme nieco zistit’
ak budeme skalovat’ vel’ke kmity kyvadla (napr. ako sa zmenı doba kyvu, ked’ pociatocna vychylka sazdvojnasobı?):
ϕ+g
lsin (ϕ) = 0→ 1
b2fϕ+
g
alsin (fϕ) =
f
b2
[ϕ+
b2
af
g
lsin(fϕ︸︷︷︸?
)]= 0
Vidıme, ze ak f -krat preskalujeme vychylky kyvadla, nic sa o jeho spravanı nedozvedame - neexistujetotiz moznost’, ako z tejto rovnice dostat’ povodnu rovnicu nejakymi upravami pre vseobecne f (povodnytvar nedosiahneme ziadnou netrivialnou vol’bou a a b). Je tomu tak, pretoze spravanie kyvadla, ako sme uzvideli v predoslych castiach, je vel’mi exoticke - pokial’ je pociatocna vychylka 90 stupnov, jej zdvojnasobenımdostaneme nekonecnu dobu kyvu, ak su vsak vychylky male (tak male, ze budeme so zanedbanım sin(x) = xspokojnı), doba kyvu nezavisı od pociatocnej vychylky (malej).
70

3.4. PROBLEM DVOCH TELIES
3.4 Problem dvoch telies
Problem dvoch telies je popularny a zaroven analyticky riesitel’ny v uzavretom tvare, co ho predurcujeako ucebnicovy prıklad rozmaniteho vyuzitia prednostı Lagrangeovskej mechaniky.
Majme nekonecny, prazdny priestor a v nom dve bodove telesa hmotnosti m1 a m2, ktore maju polohu(voci nejakemu nepodstatnemu pociatku) ~r1 a ~r2. Predpokladajme, ze sila medzi tymito dvoma telesamisa da opısat’ jedinou funkciou potencialnej energie U (~r1, ~r2). Skusenost’ ukazuje, ze v takomto nekonecnomvesmıre nie je ziaden smer ani bod preferovany - preto by mohlo platit’, ze pri posunutı oboch telies o rovnakyvektor ~a, sa posobenie medzi nimi nijako nezmenı:
U (~r1 + ~a,~r2 + ~a) = U (~r1, ~r2)
Je mozne, ze tymto obmedzenım sa nejako zuzi pocet potencionalne prıpustnych funkciı, ktore by mohliopisovat’ interakciu tychto dvoch telies. Pod’me najst’ taku funkciu (najvseobecnejsiu moznu), ktora toto
splna. Zaved’me nove suradnice ~u a ~v nasledovne:
~u = ~r1 + ~r2 ~v = ~r1 − ~r2
Dostaneme novu funkciu tychto novych suradnıc:
U (~r1, ~r2) = V (~u,~v)
Pozrime sa, co sa stane s novymi suradnicami a s novou funkciou, ked’ spravıme posunutie o vektor ~a:
~r1 → ~r1 + ~a ~r2 → ~r2 + ~a =⇒ ~u→ ~u+ 2~a ~v → ~v
U (~r1, ~r2) = V (~u,~v )→ U (~r1 + ~a,~r2 + ~a) = V (~u+ 2~a,~v )
Ale musı platit’:
U (~r1, ~r2) = U (~r1 + ~a,~r2 + ~a) =⇒ V (~u,~v ) = V (~u+ 2~a,~v )
To ale znamena, ze funkcia V moze zavisiet’ len od druheho okienka, premennej ~v, no nie od prvehookienka, premennej ~u. Pre povodnu funkciu U to znamena zuzenie zo vsetkych moznych kombinacii vektorov~r1 a ~r2 na take, kde dana funkcia zavisı len od kombinacie ~r1 − ~r2:
U (~r1, ~r2) = U (~r1 − ~r2) (3.36)
Rovnaka podmienka by mala platit’ pre otocenia - ak obe telesa otocım okolo toho isteho bodu rovnakymsposobom, vzajomne posobenie telies sa nemoze zmenit’. Rotacie sa deju pomocou rotacnej matice A:
~r1 → A~r1 ~r2 → A~r2
Pre funkciu U to ma zasadny dosledok:
U (A~r1 −A~r2) = U [A (~r1 − ~r2)] = U(~r1 − ~r2︸ ︷︷ ︸
~r
)=⇒ U (A~r ) = U (~r ) =⇒ U (~r) = U (|~r|) (3.37)
To je vskutku ocakavany vysledok - potencialna energia U musı byt’ konstantna na guli s polomerom r,teda zo vsetkych moznych kombinacii nakoniec potencialna energia zavisı len od |~r1 − ~r2|:
=⇒ U (~r1, ~r2 ) = U (|~r1 − ~r2|) = U(r) (3.38)
71

3.4. PROBLEM DVOCH TELIES
Ked’ uz sme si ujasnili, od coho potencialna energia moze a od coho nemoze zavisiet’, pust’me sa doriesenia samotneho problemu s nejakou vseobecnou potencialnou energiou. Lagrangian tejto sustavy bude:
L(~r1, ~r2, ~r1, ~r2, t
)=
1
2m1~r
21 +
1
2m2~r
22 − U (|~r1 − ~r2|) = L
(~r1, ~r2, ~r1, ~r2,Zt
)Lagrangeove rovnice budu bohuzial’ zret’azene (ani jednu nemozno riesit’ bez tej druhej). Zavedieme
teda nove suradnice ~R a ~r, ktorych vyhodu spozname vel’mi skoro:
(~r1, ~r2)→(~R,~r
)~R =
m1~r1 +m2~r2
m1 +m2~r = ~r1 − ~r2 (3.39)
Prva suradnica opisuje polohu hmotneho stredu sustavy, druha suradnica je vlastne spojnica medzidvoma telesami. Inverzne transformacie zıskame l’ahko:
~r1 = ~R+m2
m1 +m2~r ~r2 = ~R− m1
m1 +m2~r (3.40)
Lagrangian prejde na tvar:
1
2m1~r
21 +
1
2m2~r
22 − U (|~r1 − ~r2|) =
1
2m1
(~R+
m2
m1 +m2~r
)2
+1
2m2
(~R− m1
m1 +m2~r
)2
− U(r) =
=1
2
(m1 +m2︸ ︷︷ ︸
M
)~R 2 +
1
2
[m1
(m2
m1 +m2
)2
+m2
(m1
m1 +m2
)2]~r 2 − U(r) =
=1
2M ~R 2 +
1
2
m1m22 +m2
1m2
(m1 +m2)2 ~r 2 − U(r) =
1
2M ~R 2 +
1
2
m1m2 (m2 +m1)
(m1 +m2)2 ~r 2 − U(r) =
=1
2M ~R 2 +
1
2
m1m2
m1 +m2︸ ︷︷ ︸µ
~r 2 − U(r)
=⇒ L(~R,~r
)=
1
2M ~R 2 +
1
2µ~r 2 − U(r) ; M = m1 +m2 µ =
m1m2
m1 +m2(3.41)
Po ceste sme zıskali dve hmotnostne konstanty, prva vyjadruje celkovu hmotnost’ systemu M , druha jeredukovana hmotnost’ systemu µ15. Prıjemnym faktom je, ze Lagrangian je odseparovany - rovnice pre ~R susamostatne, nezavisle na rovniciach pre ~r:
M ~R = 0 −hotovo (3.42)
µ~r = ~Fr −treba riesit’ (3.43)
Prva rovnica jednoznacne vyjadruje, ze hmotny stred sustavy nesmie robit’ ziadne psie kusy - maximalnesa moze pohybovat’ rovnomerne priamociaro. Druha rovnica je podstata problemu dvoch telies a pri zadanejsile (potenciali) a pociatocnych podmienkach vieme vypocıtat’ trajektoriu v case. Druhu rovnicu mozemeeste viac zjednodusit’. Vieme, ze silove pole je centralne:
~Fr = −~∇U = −1
r
∂U
∂r~r = α (~r ) ~r
15Mimochodom, jedna sa o polovicu harmonickeho priemeru hmotnostı m1 a m2.
72

3.4. PROBLEM DVOCH TELIES
Ak je silove pole centralne16, potom nutne moment sily je nulovy:
~M = ~r × ~F = ~r ×(−1
rU ′~r
)= ~0
To ale znamena, ze moment hybnosti je konstanta:
~L = ~M = 0 =⇒ ~L = konst. (3.44)
Na druhej strane platı:
~L = ~r × ~p =⇒ ~r · ~L = ~r · (~r × ~p ) = 0 (3.45)
Z tejto rovnice vyplyva, ze cely pohyb sa deje v rovine, ktora prechadza pociatkom17. To nas opravnujezahodit’ jednu z troch suradnıc a zaviest’ na opis len dve suradnice, x a y, ktore sa budu pohybovat’ v niektorejrovine (urcenej uz pociatocnymi podmienkami). Lagrangian prejde na tvar:
L(x, x, y, y) =1
2µ(x2 + y2
)− U
(√x2 + y2
)Ukazuje sa, ze vhodnejsı opis by bol v polarnych suradniciach (napr. z argumentu funkcie U zmizne
skareda odmocnina a jej obsahom bude zase len jedna suradnica, r):
(x, y)→ (r, ϕ) =⇒ L (r, r,Zϕ , ϕ) =1
2µ(r2 + r2ϕ2
)− U(r)
Sustava ma podl’a Lagrangianu dve zachovavajuce sa veliciny:
Zt =⇒ E =1
2µ(r2 + r2ϕ2
)+ U(r) = konst. I. (3.46)
Zϕ =⇒ ∂L
∂ϕ= µr2ϕ ≡ w = konst. II. (3.47)
(3.47 I.) je zakon zachovania energie, (3.47 II.) je zakon zachovania z-zlozky momentu hybnosti (cosme zistili uz trochu vyssie). Z druheho zakona zachovania vyplyva druhy Keplerov zakon:
µr2ϕ = µdS
dt= w =⇒ S = konst. =⇒ S = S0 +
w
µt (3.48)
Dalej by sme mohli pokracovat’ zakonom zachovania energie:
1
2µ(r2 + r2ϕ2
)+ U(r) = E
µr2ϕ = w
1
2µ
(r2 + r2 w2
µ2r4
)+ U(r) = E
µ
2r2 +
w2
2µr2+ U(r) = E
16Centralne znamena, ze v kazdom bode priestoru je jeho smer totozny so smerom vektora ~r. Jeho vel’kost’ sme vypocıtaliako U ′.
17Jedina moznost’, ako urobit’ skalarny sucin nulovym je nulovost’ aspon jedneho z vektorov, alebo ich kolmost’. Tym dostavame
priamo aj odpoved’, v akej rovine sa bude diat’ pohyb - takej, ktorej normala je1
L~L.
73

3.4. PROBLEM DVOCH TELIES
Pre zadane U(r) postupujeme nasledujucim sposobom:
µ
2r2 +
w2
2µr2+ U(r) = E
r2 +w2
µ2r2=
2
µ[E − U (r)]
r2 =2
µE − 2
µUef.(r)
kde Uef.(r) je efektıvny potencial sustavy:
Uef.(r) ≡[U (r) +
w2
2µr2
](3.49)
V rovniciach sa prirodzene objavila akasi efektıvna potencialna energia, ktora v sebe samozrejme skryvaaj skutocnu potencialnu energiu dvoch telies. Sme v stave, ze ak nam niekto da konkretnu potencialnuenergiu, problem mame vyrieseny v kvadraturach18:
dr
dt=
√2
µ
√E − Uef.(r)ˆ
dr√2µ
√E − Uef.(r)
=
ˆdt = t− t0 (3.50)
Vidıme, ze ak by sme poznali U(r) (a vedeli vypocıtat’ dany integral v elementarnych funkciach), dostaliby sme riesenie t(r). To je takmer to iste, ako r(t), teda uloha je momentalne vyriesena najviac, ako lenmoze byt’ vzhl’adom na parametre, ktore v ulohe pozname. Pre uhol ϕ by sme riesenie nasli uz z r(t) znovuzo zakona zachovania z-zlozky momentu hybnosti:
µr2(t)ϕ = w =⇒ dϕ =w
µr2(t)dt =⇒ ϕ =
ˆw
µr2(t)dt (3.51)
Uz zo zakona zachovania z-zlozky momentu hybnosti vidno, ze pohyb v uhle ϕ je monotonny - vyrazw/(µr2) totiz nemenı znamienko.
Doteraz sa uloha volala vseobecne - problem dvoch telies. Ked’ze sme v stadiu, ze vel’a toho uz prevseobecnu potencialnu energiu nezistıme, zavedieme gravitacnu (poprıpade elektricku prıt’azlivu) potencialnuenergiu:
U(r) = −αr
; α > 0 (3.52)
a problem premenujeme na Keplerovu ulohu19.
18Riesenie v kvadraturach je riesenie, ktore je vyjadrene ako:
ˆR(r)dr =
ˆT (t)dt,
teda ku skutocnemu explicitnemu rieseniu nieco este chyba, co vsak nie je az tak podstatne (rozhodne je problem v lepsomstadiu, ako ked’ je vyjadreny pomocou diferencialnej rovnice, no v horsom stadiu, akokeby sme mali explicitne r(t)).
19Vsimneme si absolutne nepodstatnu vec a to ze predtym sme riesili ulohu, ktora mala v nazve ‘problem’ a teraz riesimeproblem, ktory ma v nazve ‘ulohu’.
74
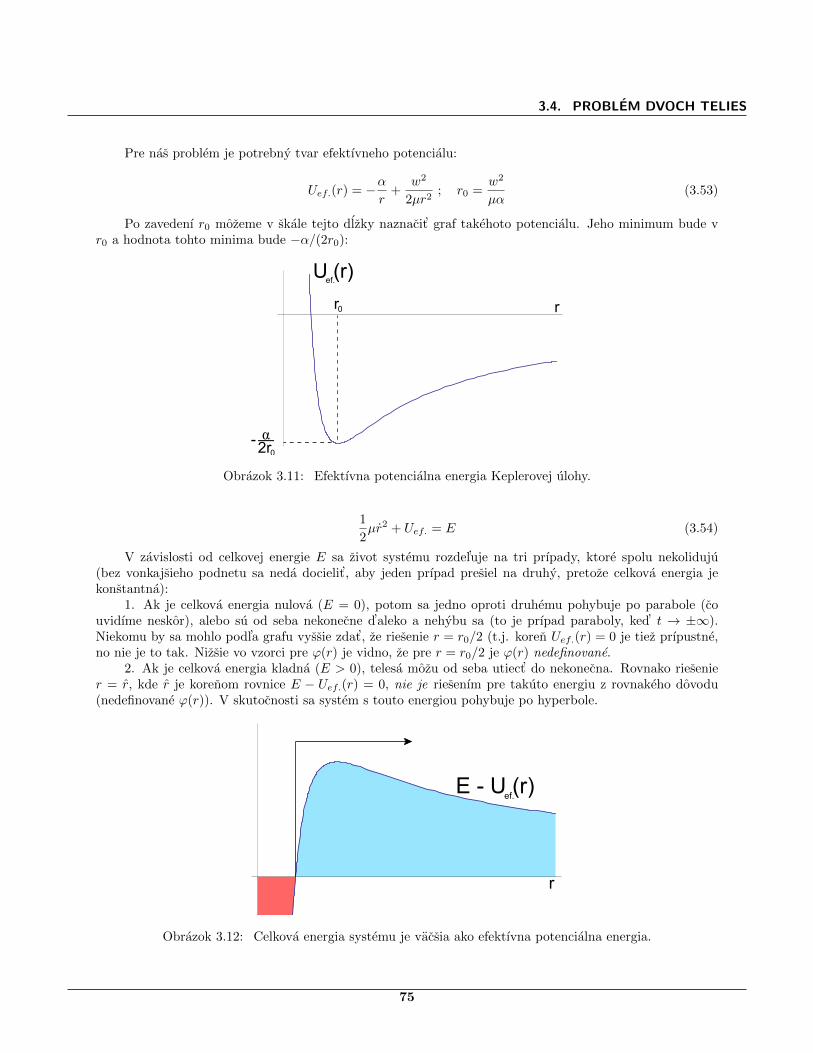
3.4. PROBLEM DVOCH TELIES
Pre nas problem je potrebny tvar efektıvneho potencialu:
Uef.(r) = −αr
+w2
2µr2; r0 =
w2
µα(3.53)
Po zavedenı r0 mozeme v skale tejto dlzky naznacit’ graf takehoto potencialu. Jeho minimum bude vr0 a hodnota tohto minima bude −α/(2r0):
r
α 2r
0
0
_-
U (r)ef.
r
Obrazok 3.11: Efektıvna potencialna energia Keplerovej ulohy.
1
2µr2 + Uef. = E (3.54)
V zavislosti od celkovej energie E sa zivot systemu rozdel’uje na tri prıpady, ktore spolu nekoliduju(bez vonkajsieho podnetu sa neda docielit’, aby jeden prıpad presiel na druhy, pretoze celkova energia jekonstantna):
1. Ak je celkova energia nulova (E = 0), potom sa jedno oproti druhemu pohybuje po parabole (couvidıme neskor), alebo su od seba nekonecne d’aleko a nehybu sa (to je prıpad paraboly, ked’ t → ±∞).Niekomu by sa mohlo podl’a grafu vyssie zdat’, ze riesenie r = r0/2 (t.j. koren Uef.(r) = 0 je tiez prıpustne,no nie je to tak. Nizsie vo vzorci pre ϕ(r) je vidno, ze pre r = r0/2 je ϕ(r) nedefinovane.
2. Ak je celkova energia kladna (E > 0), telesa mozu od seba utiect’ do nekonecna. Rovnako riesenier = r, kde r je korenom rovnice E − Uef.(r) = 0, nie je riesenım pre takuto energiu z rovnakeho dovodu(nedefinovane ϕ(r)). V skutocnosti sa system s touto energiou pohybuje po hyperbole.
E - U (r)ef.
r
Obrazok 3.12: Celkova energia systemu je vacsia ako efektıvna potencialna energia.
75

3.4. PROBLEM DVOCH TELIES
3. Ak je celkova energia zaporna (E < 0), telesa su od seba v istom intervale vzdialene a obiehaju okoloseba (nemozu sa oslobodit’):
E - U (r)ef.
r
Obrazok 3.13: Celkova energia systemu je mensia ako efektıvna potencialna energia.
Na kompletne pochopenie problemu netreba vediet’ vyriesit’ casove zavislosti r(t) a ϕ(t), stacı namzavislost’ r(ϕ), respektıve ϕ(r), ked’ze prave v tychto zavislostiach sa skryva tvar trajektorie. Z rovnıc 3.47a 3.4 dostavame:
dϕ =w
µr2dt dr =
√2
µ
√E − Uef.(r)dt =⇒ dϕ
dr=
w√2µ
1
r2√E − Uef.(r)
ϕ(r) =
ˆw r−2√
2µE + 2µαr−1 − w2r−2dr (3.55)
Tu uz celkom jasne vidno, preco v prıpade E > 0 a E = 0 nie je riesenım r = konst., hoci aj take, prektore platı Uef.(r) = 0, rovnica (3.54) by tym sıce bola splnena, no ϕ(r) by bolo nedefinovane.
Integral vyriesime. Prvou substituciou prevedieme skaredy integral na trochu krajsı:ˆw r−2dr√
2µE + 2µαr−1 − w2r−2=
[w r−1 = p
w r−2dr = −dp
]= −
ˆdp√
2µE + 2µαw p− p2
Vyraz pod odmocninou prevedieme na stvorec a nasledne spravıme druhu substituciu, ktora integralprevedie na cyklometricku funkciu:
2µE +2µα
wp− p2 = 2µE +
(µαw
)2
−(p− µα
w
)2
=
(2µE +
(µαw
)2)(
1− u2)
; u =p− µα
w√2µE +
(µαw
)2ϕ(r) =
u =p−µαw√
2µE+(µαw )2
dp =
√2µE +
(µαw
)2du
= −
ˆdu√
1− u2= arccos
[u[p (r)
]]+ C
Dostavame implicitne vyjadrenie:
ϕ(r) = arccos
wr −
µαw√
2µE +(µαw
)2+ C
76

3.4. PROBLEM DVOCH TELIES
Konstantu C identifikujeme ako pociatocny uhol ϕ0 a rovnicu upravujeme az do vysledneho tvaru:
wr −
µαw√
2µE +(µαw
)2 = cos (ϕ− ϕ0)
w
r=µα
w+
√2µE +
(µαw
)2
cos (ϕ− ϕ0)
r0
r= 1 + e cos (ϕ− ϕ0) ; r0 =
w2
µα, e =
√1 +
2Ew2
µα2(3.56)
kde e je excentricita elipsy a ϕ0 je nejaky pociatocny uhol (obe su v podstate reprezentacie nejakychpociatocnych podmienok).
Toto je rovnica kuzel’oseciek20, ktorej parameter vystrednost’ je priamo e. Vyraz r0 (ktory je korenomUef.) je len skalovacı parameter.
Tri prıpady, ktore sme rozobrali predtym vidıme aj teraz:1. Ak je celkova energia nulova (E = 0), potom sa jedno oproti druhemu pohybuje po parabole, co
predstavuje vystrednost’ e = 1.
E = 0 =⇒ r =r0
1 + cos (ϕ− ϕ0)(3.57)
Tento prıpad hovorı o tom, ze v case t → ±∞ su telesa od seba nekonecne vzdialene a stoja, pretoze ked’
r →∞, potom Uef.(r) = 0 a teda aj r = −2Uef./µ = 0.2. Ak je celkova energia kladna (E > 0), vystrednost’ kuzel’osecky e je vacsia ako 1 a trajektoria je
hyperbola. V tomto prıpade tiez platı, ze v case t → ±∞ su od seba telesa nekonecne vzdialene, no ichvzd’alovanie pokracuje limitne konstantnou vzajomnou rychlost’ou.
3. Ak je celkova energia zaporna (E < 0), vystrednost’ e je v intervale 0 ≤ e < 1, co predstavuje elipsualebo kruznicu. V tomto prıpade telesa od seba nemozu utiect’ a riesenie je periodicke v case. Specialnymprıpadom je kruznica, ked’ e = 0:
E = −α2µ
2w2=⇒ e = 0 (3.58)
t.j. rovnica E − Uef.(r) = 0 ma jedine riesenie - trajektoria pohybu s takouto energiou bude kruznica. V(3.56) to vidno tiez, pre l’ubovol’ny uhol ϕ totiz dostavame:
e = 0 =⇒ r
r0= 1 =⇒ r ≡ r0 (3.59)
20Conic section, alebo len conic. V literature mozno najst’ rovnicu kuzel’osecky v tvare:
r0
r= 1− e cos (ϕ− ϕ0)
Tento tvar sa od nasho lısi nenapadnym znamienkom mınus pred e. Riesenie to nijako dramaticky nemenı, jedna sa leno otocenie celej situacie o 180 v rovine pohybu. Ak chceme mat’ aj my v rovnici silou-mocou mınus, stacı urobit’ zamenu:ϕ0 7→ π + ϕ0.
77
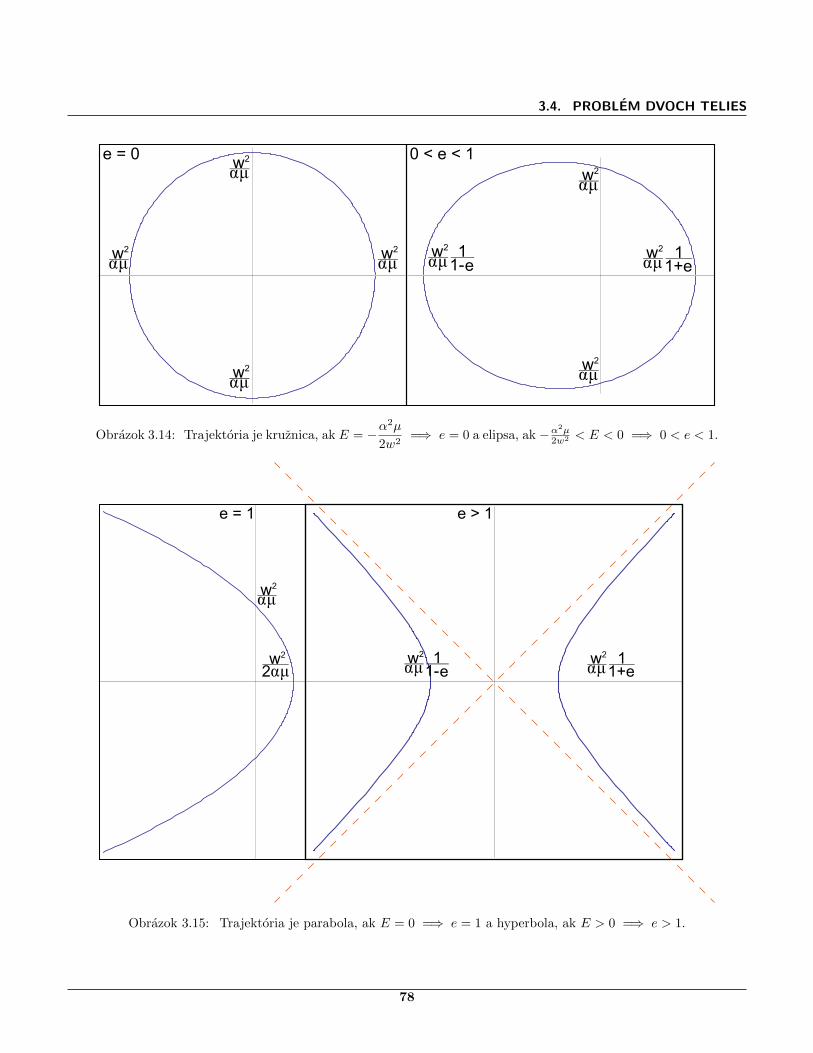
3.4. PROBLEM DVOCH TELIES
αμ w2_
αμ w2_
αμ w2_
αμ w2_
e = 0
αμ w2_
αμ w2_
αμ w2__
1+e1αμ w2
__
1-1e
0 < e < 1
Obrazok 3.14: Trajektoria je kruznica, ak E = −α2µ
2w2=⇒ e = 0 a elipsa, ak −α
2µ2w2 < E < 0 =⇒ 0 < e < 1.
αμ w2_
αμ w2_
2 αμ w2__
1+e1αμ w2
__
1-1e
e = 1 e > 1
Obrazok 3.15: Trajektoria je parabola, ak E = 0 =⇒ e = 1 a hyperbola, ak E > 0 =⇒ e > 1.
78

3.5. MALE KMITY
3.5 Male kmity
Male kmity sa ukazuju byt’ uzitocnym nastrojom vo vsetkych prıpadoch, kedy ma system ocividneminimum potencialnej energie, no jej funkcia nie je kvadratickou formou v danom bode, teda vratna silaprisluchajuca okoliu tohto rovnovazneho bodu je nelinearna. Rovnice s takouto nelinearnou vratnou silou suv drvivej vacsine neriesitel’ne v elementarnych funkciach, no nas povacsinou zaujımaju tzv. mody kmitania,teda akesi separovane elementarne kmity roznych castı systemu prave v uzkom okolı tohto minima (alebo
roznych minım, o ktorych vieme) - mody malych kmitov. Ukazuje sa, ze pre potencialne energie splnajuceiste podmienky sa male kmity daju riesit’ uplne algoritmicky.
Ako prıklad moze posluzit’ rovinne matematicke kyvadlo, ktoreho pohybova rovnica je:
ϕ+g
lsin (ϕ) = 0 (3.60)
Typicka rozpravka o tejto rovnici je, ze ak su vychylky v uhle ϕ male (kde male znamena take, ze smes malost’ou rozdielu medzi ϕ a sin (ϕ) spokojnı), potom sin (ϕ) ≈ ϕ a rovnica prejde na tvar:
ϕ+ ω2ϕ = 0 ; ω2 =g
l(3.61)
Skryto sa vlastne pri tomto procese odvolavame na male kmity. Potencialna energia ma tvar:
U = −mgl cos (ϕ) (3.62)
Vieme, ze tato potencialna energia ma v okolı ϕ = 0 svoje lokalne minimum, teda je mozne, aby systemkmital v tomto okolı, ak sa jeho celkova energia privel’mi nelısi od energie v tomto minime:
U (ϕ) = −mgl +1
2mglϕ2 +O
(ϕ4)
=⇒ U (ϕ) ≈ −mgl +1
2mglϕ2 (3.63)
Dosad’me tuto energiu do Lagrangianu a vyjadrime pohybovu rovnicu pre suradnicu ϕ:
L = T − U =1
2ml2ϕ2 +mgl
(1
2ϕ2 − 1
)ml2ϕ+mglϕ = 0
ϕ+g
lϕ = 0 (3.64)
Vidıme, ze dostavame rovnicu totoznu s malymi kmitmi rovinneho matematickeho kyvadla. Po ceste smesa naucili uzitocnu vec - pri rozvıjanı potencialnej energie do Taylorovho radu v okolı lokalneho minima stacızobrat’ cleny do druhej mocniny (vratane), pricom na konstantnom clene nezalezı (pri derivacii Lagrangianuv pohybovej rovnici aj tak zmizne). Uvazovat’ situaciu v blızkom okolı minima potencialnej energie, kde samozeme obmedzit’ na prvy clen Taylorovho rozvoja, vedie na linearne diferencialne rovnice. Taketo rovnicemaju l’udia (beruc ohl’ad na zlozitost’ ich riesenia) vacsinou radsej ako tie nelinearne. Ak by sa stalo, ze vdanej suradnici v danom lokalnom minime je koeficient pri druhej mocnine suradnice nulovy, je to problem.Predstavme si napr. potencialnu energiu:
U(x) =1
4kx4
Tento tvar je sam sebe priamo Taylorovym polynomom (pretoze je to polynom a Taylorov rozvojpolynomu je...polynom), no nevidıme v nom ziaden clen, pri ktorom by stalo x2, to je vsak problem. Pohy-bova rovnica s takymto potencialom totiz bude nelinearna:
x+k
mx3 = 0
79

3.5. MALE KMITY
Casovy vyvoj takehoto oscilatora potrebuje Jacobiho elipticku funkciu sn (s Eliptickymi funkciamisme sa uz stretli pri vel’kych kmitoch kyvadla), periodu kyvu mozno za predpokladu poznania maximalnejvychylky vyjadrit’ ako β-funkciu. Vrat’me sa vsak k priblızeniu malych kmitov.
Vseobecny postup predpoklada, ze potencialna energia systemu:
U (q1, q2, . . . , qn) = U (q) (3.65)
ma v nejakom bode (Q0) lokalne minimum, teda platı:
∃U (Q0) ∀q ∈ U (Q0) \ Q0 : E = T + U (q) > T + U (Q0) (3.66)
Potencialnu energiu potom mozno rozvinut’ do Taylorovho radu v tomto okolı:
U (q) = U (Q0) +∂U
∂qi
∣∣∣∣q=Q0︸ ︷︷ ︸
=0
(qi −Q0i) +1
2
∂2U
∂qi∂qj
∣∣∣∣q=Q0︸ ︷︷ ︸
=Kij
=xi︷ ︸︸ ︷(qi −Q0i)
=xj︷ ︸︸ ︷(qj −Q0j) +O
[(q−Q)
3]
Uvazujme potencialnu energiu v novych suradniciach xi, ktore su ako site na mieru tomuto problemu.Ich stred sa totiz nachadza priamo v minime starej potencialnej energie. Nova potencialna energia nebudeobsahovat’ ani konstantny clen U (Q0), pretoze tento aj tak vypadne pri derivacii:
V (x) =1
2Kijxixj (3.67)
Matica Kij musı byt’ kladne definitna ak sa jedna o ostre lokalne minimum21.System este obsahuje kineticku energiu:
T (q, q) =1
2Tij (q) qiqj =
1
2Tij (q) xixj (3.68)
Posledna rovnost’ platı vd’aka definıcii xi (linearne posunutie) a tomu, ze premenne vystupuju v kinet-ickej energii len v derivovanej podobe. Aj Tij mozno rozvinut’ do radu v okolı Q0:
Tij (q) = Tij (Q0)︸ ︷︷ ︸Mij
+
XXXXXXXX
∂Tij∂qk
(qk −Q0k) +O[(q−Q0)
2]
Prvy clen je vlastne konstantna matica v danom minime, ktoru sme oznacili ako Mij . Ukazuje sa,ze v priblızenı malych kmitov stacı brat’ len prvy clen v rozvoji kinetickej energie. Prıjemny bonus tejtoaproximacie je, ze vysledne pohybove rovnice, ktore zıskame, su linearne. Zıskali sme teda priblizne tvarykinetickej a potencialnej energie v okolı daneho lokalneho minima potencialnej energie, z ktorych zostavımeLagrangian:
T (x, x) =1
2Mij xixj
U (x) =1
2Kijxixj
L (x, x) =1
2Mij xixj −
1
2Kijxixj (3.69)
Pohybova rovnica pre i-tu suradnicu bude:
d
dt
∂L
∂xi− ∂L
∂xi= 0
Mij xj +Kijxj = 0 (3.70)
21Algebra 2
80

3.5. MALE KMITY
Vidıme, ze tato rovnica obsahuje pre vseobecne Mij a Kij naraz rozne suradnice x, cize stupne vol’nostiv tomto prıpade interaguju. Dobra sprava je, ze vhodnou transformaciou suradnıc mozno docielit’, aby bolajedna z matıc jednotkova a druha diagonalna, co si ukazeme coskoro. Robıme teda vo vseobecnosti linearnutransformaciu suradnıc x:
xi = Aijξj =⇒ ξj =(A−1
)ijxi
Skumajme Lagrangian po tejto transformacii:
L(ξ, ξ)
=1
2MijAik ξkAjlξl −
1
2KijAikξkAjlξl =
1
2
(AT)kiMijAjl︸ ︷︷ ︸
=(ATMA)kl
ξk ξl −1
2
(AT)kiKijAjl︸ ︷︷ ︸
=(ATKA)kl
ξkξl =
=1
2Mij ξiξj −
1
2Kijξiξj (3.71)
M = ATMA K = ATKA (3.72)
Skusme docielit’, abyM = ATMA bola jednotkova matica. Dalsie odvodenie bude skor uvaha. Prejdimepomocou matice B ku d’alsım suradniciam, pre ktore tentoraz platı:
xA→ ξ
B→ η ; xi = Bijηj (3.73)
Aj pre tieto suradnice pozadujeme, aby v nich bola matica M jednotkova (v ξ aj v η):
M→ BTMB = BTB = In (3.74)
Maticu K to postihne nasledujucim sposobom:
K → BTKB (3.75)
Vieme, ze K je kladne definitna (pretoze uz povodna matica K bola kladne definitna). Potom ak preB platı BTB = In, tak BTKB je diagonalna a kladne definitna. Dostavame teda zaver, ze existuje takasuradnicova sustava, v ktorej bude matica M jednotkova a matica K diagonalna, kladne definitna - coznamena, ze vsetky jej prvky budu kladne. Oznacme ich teda druhymi mocninami:
K = (ω12
ωn
2 (00
Potom Lagrangian sustavy bude:
L =1
2δij xixj −
1
2Kijxixj =
1
2x2 − 1
2ω2i x
2i (3.76)
Vidıme, ze Lagrangian je separovany na n castı, tak ako aj pohybove rovnice. Pre i-tu suradnicu ξ (vovhodnej baze, v ktorej je system separovany) dostavame:
ξi + ω2i ξi = 0
Rovnicu chapeme bez sumacnej konvenciePre kazdu suradnicu v danej vhodnej baze sme dostali rovnicu linearneho harmonickeho oscilatora.
Pohyb jednotlivych suradnıc ξ su vlastne mody kmitania celeho systemu a jednotlive ω su frekvencie tychtomodov.
81

3.5. MALE KMITY
K suradniciam x sa dostaneme spatnou transformaciou:
xi = Aijξj(t)
Kmitanie k-teho modu sa vyznacuje tym, ze suradnica ξk kmita a ostatne stoja:
k − ty mod : ξ1(t) = 0 , ξ2(t) = 0 , · · · ξk(t) = Sk cos (ωkt) , · · · ξn(t) = 0
Pozrime sa, ako vyzera i-ta suradnica x v k-tom mode kmitania:
xi(t) =
n∑j=1
Aijξj(t) = Ai1
=0︷︸︸︷ξ1(t) + · · ·+Aikξk(t) + · · ·+Ain
=0︷ ︸︸ ︷ξn(t) =
=@@
∑AikSk cos (ωkt) =
@@
∑Cik cos (ωkt)
Vidıme, ze v danom k-tom mode kmitania vsetky suradnice xi kmitaju s frekvenciou k-teho modu(alebo nekmitaju vobec, pokial’Aik = 0).
Ak chceme zistit’ frekvencie modov kmitania v povodnych suradniciach x, o danom mode platı, ze celykmita s jednou frekvenciou:
k − ty mod : x = c cos (ωt) =⇒ x = −cω2 cos (ωt)
Tento poznatok dosadıme do povodnej pohybovej rovnice (3.70) pre suradnice x:
Mij xj +Kijxj = 0
M[−cω2 cos (ωt)
]+K c cos (ωt) = 0(
K − ω2M)c cos (ωt) = 0
Pre nenulovy vektor c platı, ze ak ma byt’ tato rovnica splnena, potom nutne:
det(K − ω2M
)= 0 (3.77)∣∣∣∣∣∣∣∣∣
K11 − ω2M11 K12 − ω2M12 · · · K1n − ω2M1n
K21 − ω2M21 K22 − ω2M22 · · · K2n − ω2M2n
......
. . ....
Kn1 − ω2Mn1 Kn2 − ω2Mn2 · · · Knn − ω2Mnn
∣∣∣∣∣∣∣∣∣ = 0 (3.78)
Prave zostavenu rovnicu volame sekularna, alebo aj charakteristicka rovnica. Vo vseobecnosti je tovlastne polynom n-teho stupna v premennej ω2. To ale znamena, ze rovnica det
(K − ω2M
)= 0 vedie vo
vseobecnosti na n riesenı v premennej ω2 a na 2n riesenı v premennej ω (pricom tieto dve suvisia spolu cezopacne znamienko, no fyzikalne ma zmysel len kladna frekvencia). Ked’ uz mame pre kazdy mod zistenujeho frekvenciu, ostava vyriesit’, ako budu kmitat’ povodne suradnice x. K tomu nam pomoze rovnica:
(K − ω2M
)c1...cn
= 0 (3.79)
co je vlastne sustava linearnych rovnıc.
82

3.5. MALE KMITY
3.5.1 Prıklady z kmitov
Male kmity spriahnutych pruzın
Majme spriahnute pruzinky, ako na obrazku:
mk
x x
mk k
1 2
Obrazok 3.16: Spriahnute pruzinky.
Predpokladame, ze tuhosti pruzın su rovnake a hmotnosti teliesok tiez. Suradnicu teliesok budememerat’ od ich pokojovych hodnot (t.j. ked’ sa system nehybe a vsetci su spokojnı a pokojnı tam, kde su).Napıseme si potencialnu energiu:
U (x1, x2) =1
2kx2
1 +1
2k (x1 − x2)
2+
1
2kx2
2 =1
2
(x1, x2
)(2k −k−k 2k
)(x1
x2
)=⇒ K =
(2k −k−k 2k
)Vidıme, ze tvar potencialnej energie uz je v tvare malych kmitov. Kineticku energiu:
T (x1, x1, x2, x2) =1
2m(x2
1 + x22
)=
1
2
(x1, x2
)(m 00 m
)(x1
x2
)=⇒ M =
(m 00 m
),
uz nemusıme upravovat’. Riesenım sekularnej rovnice zıskame vlastne frekvencie modov kmitania systemu:
(K − ω2M
)=
(2k − ω2m −k−k 2k − ω2m
)det(K − ω2M
)= 0 =⇒
∣∣∣∣2k − ω2m −k−k 2k − ω2m
∣∣∣∣ = 0 =⇒(2k − ω2m
)2 − k2 = 0
(2k − ω2m
)2= k2 =⇒ 2k − ω2m = ±k =⇒ ω2 =
2k ∓ km
ω1 =
√k
mω2 =
√3k
m
Riesenım sustavy (3.79) pre vlastne vektory (x1, x2) sa presvedcıme o tom, ze jednotlive mody zod-povedaju kmitaniu guliciek vo faze a v protifaze:
1. mod : x1(t) = A cos (ω1t+ ϕ1) x2(t) = A cos (ω1t+ ϕ1)
2. mod : x1(t) = A cos (ω2t+ ϕ1) x2(t) = −A cos (ω2t+ ϕ1)
83

3.5. MALE KMITY
Male kmity sferickeho matematickeho kyvadla
Majme jeho Lagrangian vo sferickych suradniciach, dlzka kyvadla nech je l0 = konst.:
L(θ, ϕ, θ, ϕ, t
)=
1
2ml20
[θ2 + ϕ2 sin2 (θ)
]+mgl0 cos (θ)
Rozvinme potencialnu energiu do mocninneho radu v okolı jej minima, ktore je urcite v θ = 0. Ked’zesa tato potencialna energia sklada len z jedneho clenu (v jednej premennej), bude vyzerat’ jednoducho:
U (θ, ϕ, t) = −mgl0 +1
2mgl0θ
2
A tu narazame na problem. Problemom je, ze aj ked’ ma potencialna energia v θ = 0 minimum (prel’ubovol’ne ϕ), nemozeme polozit’ ϕ rovne nule (ani inej konstante), pretoze toto minimum platı pre vsetky ϕ(co vidno aj z toho, ze ϕ sa explicitne v potencialnej energii nenachadza). No ak chceme robit’ male kmitytejto sustavy len v premennej θ (pretoze ϕ v ziadnom prıpade nema preco byt’ len male), musıme sa pozriet’
na kineticku energiu a hned’ zbadame problem. Premenne θ a ϕ su zret’azene, co znamena, ze bud’ obe narazvykonavaju male kmity, alebo male kmity nevykonava ani jedna. Obe naraz nemozu konat’ male kmity, lebotakato podmienka je pre nas system nefyzikalna22. Ked’ ani jedna suradnica nekona male kmity, sme nutenıriesit’ povodnu sustavu, co nie je ciel’om tejto ulohy 23.
Nastava cas na zamyslenie, ci je tento problem sposobeny suradnicami, alebo systemom ako takym.Skusme sa na system pozriet’ v kartezskych suradniciach. V takychto suradniciach (x, y, z) mame pre z vokolı rovnovaznej polohy:
z = −√l20 − x2 − y2 (3.80)
Potencialna energia bude:
U = mgz = −mg√l20 − x2 − y2
Rozvinme tuto potencialnu energiu do Taylorovho radu so stredom v (x, y) = (0, 0):
U = −mgl0 +mg
2l0
(x2 + y2
)Kineticka energia:
T =1
2m(x2 + y2 + z2
)z2 bude:
z2 =
(∂z
∂xx+
∂z
∂yy
)2
=
(xx+ yy√l20 − x2 − y2
)2
=x2x2 + 2xyxy + y2y2
l20 − x2 − y2
=⇒ T =1
2m
(x2 + y2 +
x2x2 + 2xyxy + y2y2
l20 − x2 − y2
)V maticovom tvare:
T =1
2m(x y
)1 +x2
l20 − x2 − y2
xy
l20 − x2 − y2
xy
l20 − x2 − y21 +
y2
l20 − x2 − y2
(xy)
22Predstava sferickeho kyvadla nas vedie k zaveru, ze ϕ nema preco byt’ ohranicene v malom okolı nejakeho ϕ0.23A celkom by sme si aj fandili, keby sme sa o to pokusali vo vseobecnosti.
84

3.5. MALE KMITY
Zvol’me teraz v kinetickej energii x = 0 a y = 0 (lebo v okolı tychto bodov sa konaju male kmity) anapısme vysledny Lagrangian (bez konstantnych clenov):
L =1
2m(x2 + y2
)− mg
2l0
(x2 + y2
)Vidıme, ze Lagrangian sa nam rozdelil na dva Lagrangiany, pricom kazdy z nich opisuje len jednu
suradnicu, bud’ x, alebo y. Potom necudo, ze vysledne Lagrangeove rovnice malych kmitov sferickehokyvadla v minime opisuju izotropny dvojrozmerny linearny harmonicky oscilator:
x+g
l0x = 0 y +
g
l0y = 0
Tieto rovnice opisuju dvojrozmerny izotropny oscilator – to je taky, ktory nerozpozna, do ktorehosmeru kmita24. V oboch osiach na neho posobı rovnaka sila umerna vychylke, tento system ma teda jednufrekvenciu jednoznacne urcenu vyrazom:
ω20 =
g
l0
Ak kyvadlo kona male kmity v okolı x = 0, y = 0, pohybuje sa v priemete do roviny x, y po elipse.Suradnicu z dopocıtame zo vzt’ahu (3.80).
Vrat’me sa k povodnej otazke: je problem v samotnom systeme, alebo v sferickych suradniciach?Ocividne sa nam prave podarilo vyriesit’ male kmity uvazovaneho systemu v kartezskych suradniciach,problem teda nebude v systeme, ale v sferickych suradniciach. Zobrazenie (x, y) do (θ, ϕ) sposobilo, zeto co bolo v (x, y) v malych kmitoch separovane, je v (θ, ϕ) zret’azene. Kym pre suradnice x a y znamenajumale kmity naozaj maly pohyb v ohranicenom priestore, pre suradnicu ϕ nic take neexistuje. Male kmitymoze sfericke kyvadlo vykonavat’ aj tak, ze sa tocı dookola blızko pri rovnovaznej polohe.
24Ak sa nepozrie na cenovku suradnej osi kupenej v Tescu, na ktorej stojı ,,kartezska os x (resp. y), drevena, dlzka: nekonecno,cena: 5 eur”.
85

3.5. MALE KMITY
Male kmity sustavy n rovinnych kyvadiel spriahnutych pruzinami**
1 2 3 4
k
l l l l
k kk
Obrazok 3.17: Spriahnute kyvadla.
Ukazuje sa, ze tentoraz budu na opis kinematiky tohto systemu uhly ϕ1, ϕ2, ..., ϕn. Budeme predpokla-dat’ take rozostupy kyvadiel v rovnovaznych polohach, v ktorych vsetky kyvadla visia zvislo nadol. V malychkmitoch budeme zanedbavat’ prejavy kyvadlovitosti (a to ze s uhlom ϕ sa trochu (alebo aj vel’mi) zmenı vyska,v ktorej je kyvadlo) na deformaciu pruzın (ze vo vseobecnom stave je pruzina nie vzdy vodorovne).
Prepocıtajme suradnice i-teho kyvadla v premennej ϕi, ako aj ich derivacie a kvadraty derivaciı.Definicny vzt’ah25 pre mapovanie (x, z) do (l, ϕ) je:
xi = l sin (ϕi) =⇒ xi = l cos (ϕi) ϕi =⇒ x2i = l2 cos2 (ϕi) ϕ
2i
zi = −l cos (ϕi) =⇒ zi = l sin (ϕi) ϕi =⇒ z2i = l2 sin2 (ϕi) ϕ
2i
(3.81)
Dolezity detail je, ze polohy xi su brane ako zvisly priemet vychylky kyvadla do suradnej osi x. Absolutnapozıcia kyvadla v priestore je irelevantna. Kineticka energia sustavy bude:
T =1
2
n∑i=1
m(x2i + z2
i
)=
1
2l2
n∑i=1
m ϕ2i (3.82)
Zapis v podobe kvadratickej formy:
T =1
2
(ϕ1 · · · ϕn
)m l2 0 · · · 0
0 m l2 · · · 0...
.... . .
...0 0 · · · m l2
ϕ1
···ϕn
(3.83)
Maticu tejto kvadratickej formy oznacme M .Zapısme teraz potencialnu energiu sustavy. Ta sa bude skladat’ jednak z potencialnej energie v gravitacnom
poli a aj potencialnej energie stlacenych, respektıve natiahnutych pruzın:
U = Ugrav. + Upruz. =
n∑i=1
(mg zi) +1
2
n−1∑i=1
[k (xi − xi+1)
2]
V suradniciach uhlov ϕi prejde potencialna energia na tvar:
U = −mgln∑i=1
cos (ϕi) +1
2k l2
n−1∑i=1
[sin (ϕi)− sin (ϕi+1)]2
25Po kratkom rozmyslenı je zrejme, ze je to n uplne rovnakych definicnych vzt’ahov.
86
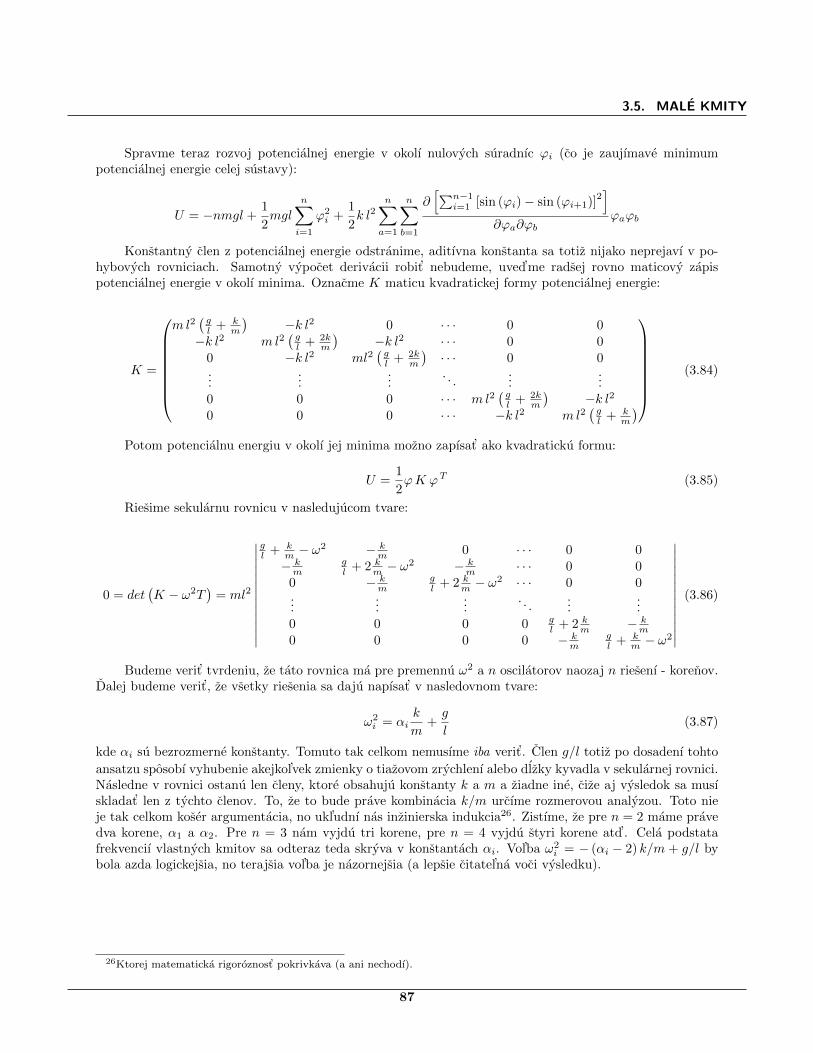
3.5. MALE KMITY
Spravme teraz rozvoj potencialnej energie v okolı nulovych suradnıc ϕi (co je zaujımave minimumpotencialnej energie celej sustavy):
U = −nmgl +1
2mgl
n∑i=1
ϕ2i +
1
2k l2
n∑a=1
n∑b=1
∂[∑n−1
i=1 [sin (ϕi)− sin (ϕi+1)]2]
∂ϕa∂ϕbϕaϕb
Konstantny clen z potencialnej energie odstranime, aditıvna konstanta sa totiz nijako neprejavı v po-hybovych rovniciach. Samotny vypocet derivacii robit’ nebudeme, uved’me radsej rovno maticovy zapispotencialnej energie v okolı minima. Oznacme K maticu kvadratickej formy potencialnej energie:
K =
ml2(gl + k
m
)−k l2 0 · · · 0 0
−k l2 ml2(gl + 2k
m
)−k l2 · · · 0 0
0 −k l2 ml2(gl + 2k
m
)· · · 0 0
......
.... . .
......
0 0 0 · · · ml2(gl + 2k
m
)−k l2
0 0 0 · · · −k l2 ml2(gl + k
m
)
(3.84)
Potom potencialnu energiu v okolı jej minima mozno zapısat’ ako kvadraticku formu:
U =1
2ϕK ϕT (3.85)
Riesime sekularnu rovnicu v nasledujucom tvare:
0 = det(K − ω2T
)= ml2
∣∣∣∣∣∣∣∣∣∣∣∣∣
gl + k
m − ω2 − k
m 0 · · · 0 0− km
gl + 2 k
m − ω2 − k
m · · · 0 00 − k
mgl + 2 k
m − ω2 · · · 0 0
......
.... . .
......
0 0 0 0 gl + 2 k
m − km
0 0 0 0 − km
gl + k
m − ω2
∣∣∣∣∣∣∣∣∣∣∣∣∣(3.86)
Budeme verit’ tvrdeniu, ze tato rovnica ma pre premennu ω2 a n oscilatorov naozaj n riesenı - korenov.Dalej budeme verit’, ze vsetky riesenia sa daju napısat’ v nasledovnom tvare:
ω2i = αi
k
m+g
l(3.87)
kde αi su bezrozmerne konstanty. Tomuto tak celkom nemusıme iba verit’. Clen g/l totiz po dosadenı tohto
ansatzu sposobı vyhubenie akejkol’vek zmienky o tiazovom zrychlenı alebo dlzky kyvadla v sekularnej rovnici.Nasledne v rovnici ostanu len cleny, ktore obsahuju konstanty k a m a ziadne ine, cize aj vysledok sa musıskladat’ len z tychto clenov. To, ze to bude prave kombinacia k/m urcıme rozmerovou analyzou. Toto nieje tak celkom koser argumentacia, no ukl’udnı nas inzinierska indukcia26. Zistıme, ze pre n = 2 mame pravedva korene, α1 a α2. Pre n = 3 nam vyjdu tri korene, pre n = 4 vyjdu styri korene atd’. Cela podstatafrekvenciı vlastnych kmitov sa odteraz teda skryva v konstantach αi. Vol’ba ω2
i = − (αi − 2) k/m + g/l bybola azda logickejsia, no terajsia vol’ba je nazornejsia (a lepsie citatel’na voci vysledku).
26Ktorej matematicka rigoroznost’ pokrivkava (a ani nechodı).
87

3.5. MALE KMITY
Dosad’me tvar zvolenej ω do sekularnej rovnice (3.86):∣∣∣∣∣∣∣∣∣∣∣
(1− α) k −k · · · 0 0−k (2− α) k · · · 0 0...
.... . .
......
0 0 0 (2− α) k −k0 0 0 −k (1− α) k
∣∣∣∣∣∣∣∣∣∣∣= 0
Tu vidıme, ze vsetky konstanty az na k vypadli. Aj to k moze vypadnut’ (za predpokladu, ze k 6= 0):
∣∣∣∣∣∣∣∣∣∣∣
(1− α) k −k · · · 0 0−k (2− α) k · · · 0 0...
.... . .
......
0 0 0 (2− α) k −k0 0 0 −k (1− α) k
∣∣∣∣∣∣∣∣∣∣∣= (−k)n
∣∣∣∣∣∣∣∣∣∣∣
α− 1 1 · · · 0 01 α− 2 · · · 0 0...
.... . .
......
0 0 0 α− 2 10 0 0 1 α− 2
∣∣∣∣∣∣∣∣∣∣∣= 0
=⇒
∣∣∣∣∣∣∣∣∣∣∣
α− 1 1 · · · 0 01 α− 2 · · · 0 0...
.... . .
......
0 0 0 α− 2 10 0 0 1 α− 1
∣∣∣∣∣∣∣∣∣∣∣≡ |E| = 0 (3.88)
Tu jasne vidno, ze argumentacia vyssie sa opiera o (nedokazany) fakt, ktory od tohto determinantupozadujeme: pre kazde n ma rovnica (3.88) n roznych realnych korenov.
Toto je najviac, co sa da vo vseobecnosti povedat’ o n spriahnutych kyvadlach. Tato rovnica ani prekonkretne vyssie n nema
”pekne korene“. Nasleduju prıklady pre konkretne n ≥ 2 (pre n = 1 mame jedine
kyvadlo s vlastnou frekvenciou√g/l).
n = 2: Matica E ma tvar: (α− 1 1
1 α− 1
)Jej determinant je polynom druheho stupna:
(α− 1)2 − 1 = 0
ktoreho korene su:
α1 = 0 α2 = 2 (3.89)
n = 3: E: α− 1 1 01 α− 2 10 1 α− 1
Jej determinant je polynom tretieho stupna:
(α− 1)[(α− 1)(α− 2)− 2] = 0
ktoreho korene su:
α1 = 0 α2 = 1 α3 = 3 (3.90)
88

3.5. MALE KMITY
n = 4: E: α− 1 1 0 0
1 α− 2 1 00 1 α− 2 10 0 1 α− 1
Jej determinant je polynom stvrteho stupna:
(α− 1)[(α− 2)
2(α− 1)− (α− 1)− (α− 2)
]− 1 [(α− 1) (α− 2)− 1] = 0
ktoreho korene su:
α1 = 0 α2 = 2−√
2 α3 = 2 α4 = 2 +√
2 (3.91)
Vsimneme si iste pravidlo. Riesenie α = 0 sa nam doteraz zakazdym objavilo ako koren. Platı tonaozaj vseobecne? Vskutku ano, predsa sa jedna o zakladny mod kmitania akehokol’vek poctu spriahnutychkyvadiel. Stacı, ak sa kyvaju spolu (ich vychylky su rovnake v case), potom sa pruziny do tohto pohybuneangazuju a dostaneme tak vlastnu frekvenciu, ktora sa rovna vlastnej frekvencii jedneho kyvadla.
Dalsie menej zrejme pravidlo je, ze riesenie α = 2 sa objavuje pri kazdom parnom pocte kyvadiel. Precoto tak je? Tento fakt sa da ukazat’, ked’ si predstavıme parny pocet kyvadiel a sparujeme ich po dvojiciach,vzdy susedne k sebe. Potom mod odpovedajuci tejto vlastnej frekvencii je taky, kedy sa kazdy takyto parkyvadiel kyve k sebe a od seba. Kazda pruzina v sustave je tak sucasne sprava aj zl’ava stlacana symetricky.Keby sa takyto pohyb dial bez angazovania gravitacneho pol’a, potom vlastna frekvencia by z
√k/m narastla
na√
2k/m. Pruziny sa vsak do vlastnej frekvencie pri spriahnutych kyvadlach angazuju uplne samostatne,rovnaka dvojka teda pred clen k/m prıde aj v tomto prıpade. Toto pravidlo sa da dokazat’ aj priamo zuprav determinantu po dosadenı za α = 2. Ked’ze determinant matice nemenı svoju hodnotu pri pricıtanıa-nasobku l’ubovol’neho riadku, alebo stlpca k inemu riadku, alebo stlpcu, potom mozeme prvy riadok odcıtat’
od druheho a prvy stlpec odcıtat’ od druheho a na mieste (2, 2) dostaneme −1. Teraz pripocıtame druhy
riadok ku tretiemu a druhy stlpec k tretiemu a na mieste (3, 3) dostaneme 1. Tento postup opakujeme az
ku poslednemu riadku a stlpcu - hodnota na mieste (n, n) bude 0, ak n je parne, no zaroven nikde inde uz
nenulove cıslo v tomto riadku alebo stlpci nebude - mame nulovy determinant. V prıpade, ze n je neparne,tato hodnota bude 2 a vieme, ze determinant sa bude pocıtat’ ako sucin prvkov na diagonale (vzhl’adom nato, ze prvky mimo diagonaly budu nuly), co je isto nenulove cıslo.
Teoreticky sa da bez problemov pokracovat’ az do n = 6, pretoze pre n = 5 bezpecne pozname jedenkoren a to α = 0, ktorym ked’ rovnicu vydelıme tak dostaneme polynom stvrteho stupna. Tento, ak sa ajneda upravit’ na jednoduchsı tvar, urcite je riesitel’ny pomocou radikalov. Pre n = 6 bezpecne pozname dvakorene a to α = 0 a α = 2, ktorymi podelıme rovnicu a dostaneme znovu polynom stvrteho stupna.
Prakticky je mozne ıst’ d’alej, aj pre vyssie n, jednak numericky, no stale existuje sanca, ze polynomy,ktore dostaneme, sa budu dat’ rozumne upravit’ na tvar, z ktorych budeme vidiet’ d’alsie korene pre α.
Ako ceresnicku na torte, bez rozmazavania zlozitych technickych detailov (kl’ucovy pojem je Laplaceovrozvoj a vel’a papiera) mame pre n = 5:
α1 = 0 α2 =1
2
(3−√
5)
α3 =1
2
(5−√
5)
α4 =1
2
(3 +√
5)
α5 =1
2
(5 +√
5)
(3.92)
A pre n = 6:
α1 = 0 α2 = 2−√
3 α3 = 1 α4 = 2 α5 = 3 α6 = 2 +√
3 (3.93)
89

3.5. MALE KMITY
Perioda kmitov anharmonickeho oscilatora**
Je dana potencialna energia anharmonickeho oscilatora:
U(x) =1
2k |x|α (3.94)
Periodu budeme vyjadrovat’ samozrejme z konstant, ktore vystupuju v potencialnej energii, hmotnostia maximalnej vychylky Xm, ktoru mame zadanu. Vychadzame zo zakona zachovania energie, kde celkovaenergia je rovna energii, ktora je ulozena vo vazbe anharmonickeho oscilatora, ak sa nachadza v maximalnejvychylke:
1
2mx2 +
1
2k |x|α = E =
1
2k |Xm|α
Najdeme diferencial dt:
1
2mx2 +
1
2k |x|α =
1
2k |Xm|α
x2 =k
m(|Xm|α − |x|α)
dt =dx√
km (|Xm|α − |x|α)
Vd’aka symetrii potencialnej energie mozme pısat’, ze pre periodu platı:
Tα (Xm) = 4
ˆ0
Xm
dx√k
m(|Xm|α − |x|α)
= 4
√m
k
ˆ0
Xm
dx√|Xm|α − |x|α
1
Xα/2m
1
Xα/2m
= 4
√m
Xαmk
ˆ0
Xm
dx√1−
(x
Xm
)α =
=
[xXm
= ξ
dx = Xmdξ
]ξ=1
ξ=0
= 4
√m
Xαmk
ˆ0
1
Xmdξ√1− ξα
= 4
√m
Xα−2m k
ˆ0
1
dξ√1− ξα
=
=
[1− ξα = η
dξ = − 1α (1− η)
1/α−1dη
]η=0
η=1
= 4
√m
Xα−2m k
ˆ1
0
− (1− η)1/α−1
dη
α√η
=4
α
√m
Xα−2m k
ˆ0
1
(η)1/2−1
(1− η)1/α−1
dη =
=4
α
√Xα−2m
√m
kβ
(1
2,
1
α
)=
4
α
√Xα−2m
√m
k
=√π︷ ︸︸ ︷
Γ
(1
2
)Γ(
1α
)Γ
(1
2+
1
α+ 1
)
Tα (Xm) =4√π
α
√Xα−2m
√m
k
Γ
(1
α
)Γ
(1
2+
1
α+ 1
) (3.95)
90
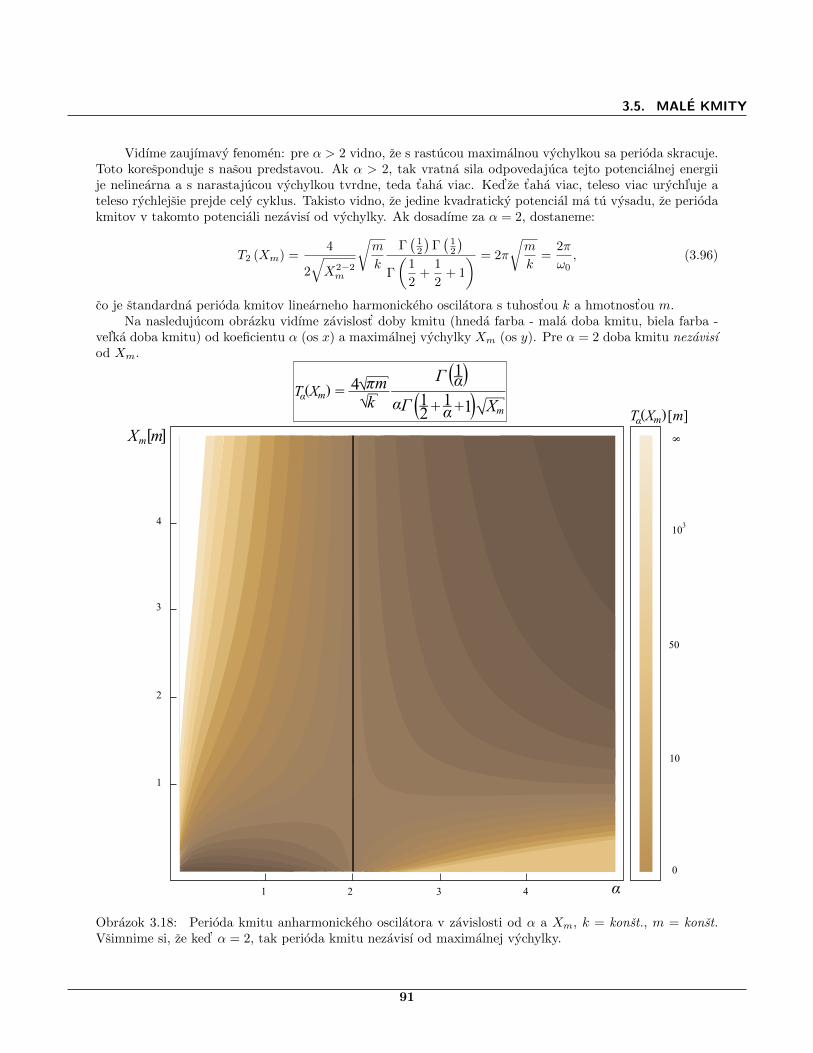
3.5. MALE KMITY
Vidıme zaujımavy fenomen: pre α > 2 vidno, ze s rastucou maximalnou vychylkou sa perioda skracuje.Toto koresponduje s nasou predstavou. Ak α > 2, tak vratna sila odpovedajuca tejto potencialnej energiije nelinearna a s narastajucou vychylkou tvrdne, teda t’aha viac. Ked’ze t’aha viac, teleso viac urychl’uje ateleso rychlejsie prejde cely cyklus. Takisto vidno, ze jedine kvadraticky potencial ma tu vysadu, ze periodakmitov v takomto potenciali nezavisı od vychylky. Ak dosadıme za α = 2, dostaneme:
T2 (Xm) =4
2
√X2−2m
√m
k
Γ(
12
)Γ(
12
)Γ
(1
2+
1
2+ 1
) = 2π
√m
k=
2π
ω0, (3.96)
co je standardna perioda kmitov linearneho harmonickeho oscilatora s tuhost’ou k a hmotnost’ou m.Na nasledujucom obrazku vidıme zavislost’ doby kmitu (hneda farba - mala doba kmitu, biela farba -
vel’ka doba kmitu) od koeficientu α (os x) a maximalnej vychylky Xm (os y). Pre α = 2 doba kmitu nezavisıod Xm.
1 2 3 4
1
2
3
4
T X m( )
α
X mm
mα
0
10
8
10
50
3
[ ]
T X( )mα
4 πm
α
Γ 1α_( )_
Γ 12_( )_
1α
_+ +1 mX=
[ ]k
Obrazok 3.18: Perioda kmitu anharmonickeho oscilatora v zavislosti od α a Xm, k = konst., m = konst.Vsimnime si, ze ked’ α = 2, tak perioda kmitu nezavisı od maximalnej vychylky.
91
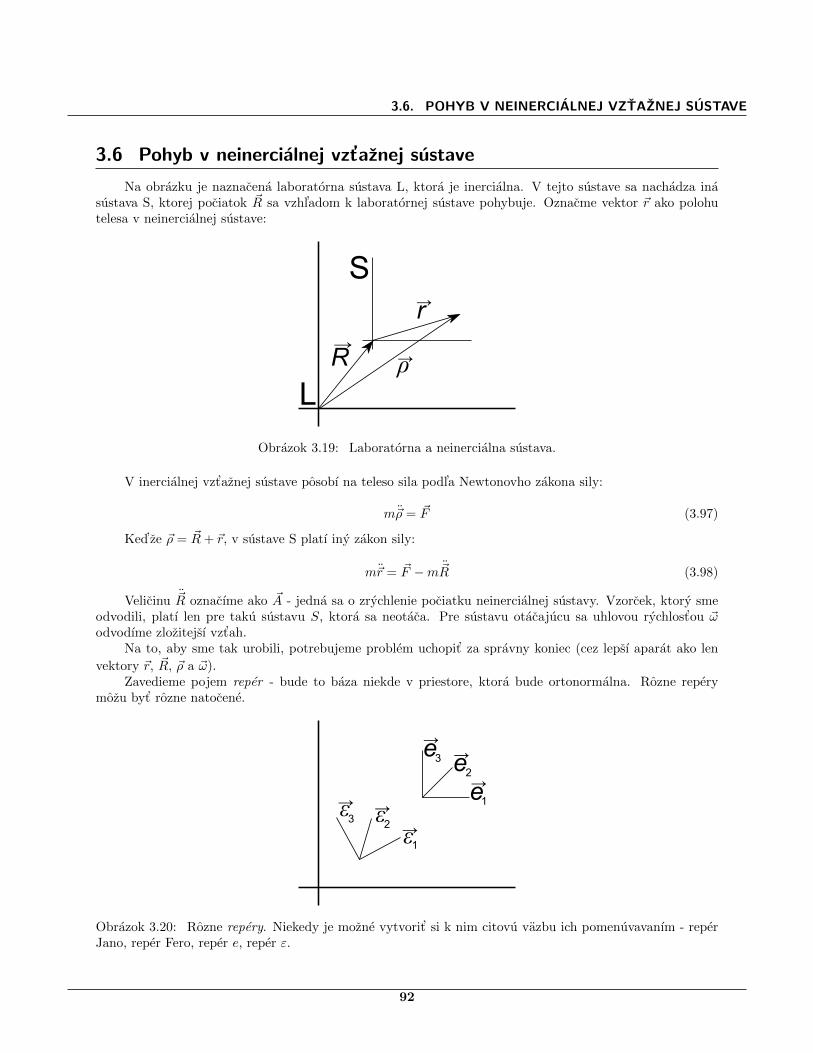
3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
3.6 Pohyb v neinercialnej vzt’aznej sustave
Na obrazku je naznacena laboratorna sustava L, ktora je inercialna. V tejto sustave sa nachadza inasustava S, ktorej pociatok ~R sa vzhl’adom k laboratornej sustave pohybuje. Oznacme vektor ~r ako polohutelesa v neinercialnej sustave:
L
S
R
r
ρ →
→
→
Obrazok 3.19: Laboratorna a neinercialna sustava.
V inercialnej vzt’aznej sustave posobı na teleso sila podl’a Newtonovho zakona sily:
m~ρ = ~F (3.97)
Ked’ze ~ρ = ~R+ ~r, v sustave S platı iny zakon sily:
m~r = ~F −m~R (3.98)
Velicinu ~R oznacıme ako ~A - jedna sa o zrychlenie pociatku neinercialnej sustavy. Vzorcek, ktory smeodvodili, platı len pre taku sustavu S, ktora sa neotaca. Pre sustavu otacajucu sa uhlovou rychlost’ou ~ωodvodıme zlozitejsı vzt’ah.
Na to, aby sme tak urobili, potrebujeme problem uchopit’ za spravny koniec (cez lepsı aparat ako len
vektory ~r, ~R, ~ρ a ~ω).Zavedieme pojem reper - bude to baza niekde v priestore, ktora bude ortonormalna. Rozne repery
mozu byt’ rozne natocene.
→ee
e1
23 →
→
ε
εε
1
23
→ →
→
Obrazok 3.20: Rozne repery. Niekedy je mozne vytvorit’ si k nim citovu vazbu ich pomenuvavanım - reperJano, reper Fero, reper e, reper ε.
92

3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
Majme teraz dva repery e a ε, ktore budu sediet’ na tom istom mieste, lısit’ sa budu len natocenım.Ked’ze kazdy reper tvorı bazu v trojrozmernom priestore, kazdy vektor z tohto priestoru mozno do
takeho repera rozlozit’. Nech vektor ~r ma zlozky Xi vzhl’adom na reper (cize bazu) e a zlozky xi vzhl’adomna reper ε. Potom platı:
~r = Xi~ei = xi~εi (3.99)
Nech teraz reper e stojı a jeho osi su zarovno s laboratornymi osami. Reper ε sa nejako tocı (pricom
stale sedı na rovnakom mieste, ako e). Rovnica (3.99) ostava v platnosti 27, ale vyjadrenie ~r sa zmenı:
~r = Xi~ei = xi~εi + xi~εi (3.100)
Vyvstava otazka, co je to vlastne ~εi. Nez ju zodpovieme, odbocıme k inym rovniciam, zdanlivo bezsuvisu.
Skumajme takuto rovnicu:
~b = ~ω ×~b, (3.101)
kde ω(t) je dane. Pozrime sa najprv na prıpad, ked’ ωi(t) = konst. Tato diferencialna rovnica ma tvar:
~b = A~b,
kde maticu A zıskame z:
[ω ×~b
]i
= εijkωjbk!= Aikbk =⇒ Aik = εijkωj ; A =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
Situaciu skumajme v baze, kde ~ω ma smer b3. Rovnice (3.101) potom prejdu na tvar:
b1 = −ωb2b2 = −ωb1
(3.102)
Toto je sustava, ktora opisuje pohyb po kruznici s uhlovou frekvenciou |~ω|. V priestore sa bude vektor~b tocit’ okolo vektoru ~ω uhlovou rychlost’ou |~ω|. Obrazok:
b→ω
→
Obrazok 3.21: Rotacia vektora ~b okolo vektora ~ω.
27jedina zmena by spocıvala v pridanı casovej zavislosti ku ~εi do zatvorky
93

3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
Prıpad pre naozajstnu casovu zavislost’ ~ω(t) uz nie je taky l’ahky, no mozno nahliadnut’ podobnespravanie v kratuckom case dt:
~b (t+ dt) = ~b(t) + dt~b(t) = ~b(t) + dt ~ω(t)×~b(t)
Tentoraz sa stihne vektor za cas dt otocit’ o kusok, ako by to urobil v prıpade konstantnej ~ω. Ked’zesa vsak ~ω(t) s casom menı, teda aj vektor a rychlost’, s akou sa bude ~b(t) tocit’ okolo ~ω(t) sa bude menit’.
Spocıtame casovu derivaciu kvadratu vel’kosti ~b:
d
dt
(~b ·~b
)= 2~b · ~b = 2~b ·
(~ω(t)×~b
)= 0
Z toho vsak plynie, ze vel’kost’ ~b sa v case nemenı (pretoze sa v case nemenı ani jej kvadrat), teda vektor
~b sa pre l’ubovol’nu ~ω(t) pohybuje na sfere. Rovnicu ~b = ~ω ×~b teda mozno chapat’ ako opis vektora ~b, ktory
rotuje okolo ineho vektora, ~ω, ktoreho koniec sa v priestore pohybuje. Rychlost’ rotacie ~b je urcena vel’kost’ou~ω a jeho okamzitu os rotacie urcuje okamzity smer ~ω.
Toto mozeme priamo zuzitkovat’ pri reperoch. Menovite reper ε vraj v case rotuje, teda urcite existuje~ω(t), ktory splna:
~εi = ~ω × ~εi (3.103)
Zaroven je vel’mi uzitocne pozorovanie, ze podl’a tejto rovnice sa vel’kost’ ~εi nemenı. Take cosi od reperupozadujeme, je to totiz ortonormalna baza (jej bazove vektory su jednotkove).
Vrat’me sa k rovnici (3.100):
~r = Xi~ei = xi~εi + xi~εi (3.104)
~r = xi~εi + xi~ω × ~εi = xi~εi + ~ω × (xi~εi) = xi~εi + ~ω × ~r (3.105)
Vyjadrıme zrychlenie telesa v sustave S, teda druhu casovu derivaciu ~r:
~r =d
dt(xi~εi + ~ω × ~r) = xi~εi + xi~εi + ~ω × ~r + ~ω × ~r =
= xi~εi + xi~ω × ~εi + ~ω × ~r + ~ω × (xi~εi + ~ω × ~r) =
= xi~εi + 2~ω × ~v + ~ω × ~r + ~ω × (~ω × ~r) (3.106)
Dostavame zakon sily v neinercialnej vzt’aznej sustave:
m~a = ~F −m~A− 2m~ω × ~v −m~ω × ~r −m~ω × (~ω × ~r) (3.107)
kde ~a je zrychlenie telesa v sustave S, ~F je realna sila, ktora nan posobı, ~A je zrychlenie sustavy S oprotiinercialnej sustave L. Druhy clen predstavuje zotrvacnu silu, tretı clen je Coriolisova sila, stvrty Eulerova apiaty Huyghensova (odstrediva) sila.
94

3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
3.6.1 Vol’ny pad telesa na rotujucu zem
Majme Zem ako idealnu gul’u s polomerom R, ktora rotuje okolo osi z (os rotacie prechadza jej stredom)uhlovou rychlost’ou ~ω = (0, 0, ω). Predpokladajme, ze vlastne zrychlenie Zeme v dosledku obehu okolo Slnka
mozeme zanedbat’, tak ako aj velicinu ~ω (uhlova rychlost’ sa nemenı prılis). Z vysky h nad povrchompada teleso k povrchu Zeme. Vieme, ze ak uvazujeme Zem ako staticke teleso, potom tato draha budepodmnozinou priamky a bod dopadu bude lezat’ na spojnici stredu gule a povodneho miesta, odkial’ telesopadalo:
z
h
z
ω
h
Obrazok 3.22: Vol’ny pad telesa na stojatu Zem vs. pad na roztocenu Zem.
Do obrazku, na ktorom sa Zem tocı (3.22), sme naznacili myslenu trajektoriu, po ktorej by malo telesopadat’ - odstredive zrychlenie staca trajektoriu k rovnıku, Coriolisova sila v smere rovnobezky.
Problem budeme najprv skumat’ vo sferickych suradniciach (r, θ, ϕ). Uhol θ budeme merat’ od osi Z, coje os, okolo ktorej Zem rotuje:
e
e
e
Z
r
θ
φ
θ
φ
X
ω
Obrazok 3.23: Sfericka suradnicova sustava. Uhol θ ∈ 〈0, π〉 je merany od (vyznacnej) osi Z, okolo ktorejsa tocı cela Zem. Uhol ϕ je zavedeny od nejakej nie vel’mi vyznacnej osi X.
95

3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
K dispozıcii mame pohybovu rovnicu, ktora vo vektorovom tvare platı v akejkol’vek sustave:
m~r = m~g − 2m~ω × ~r −m~ω × (~ω × ~r ) (3.108)
Ciel’om je postupne vyjadrit’ vsetky vektory a vektorove operacie vo sferickych suradniciach. Polohahmotneho bodu je dana len vektorom ~er:
~r = r ~er (3.109)
Vel’kost’ uhlovej rychlosti je ω a smeruje v Z, co je os, od ktorej sme zaviedli sfericky uhol θ. Jej suradniceteda budu:
~ω = ω cos (θ)~er − ω sin (θ)~eθ (3.110)
Gravitacne zrychlenie posobı v smere do stredu Zeme, jeho jedina zlozka teda bude v smere ~er:
~g = −g ~er (3.111)
Taktiez budemepotrebovat’ vyjadrenie ~r a ~r:
~r = r ~er + r ~er = r ~er + r
(∂~er∂r
r +∂~er∂θ
θ +∂~er∂ϕ
ϕ
)=
= r ~er + r(θ~eθ + sin (θ) ϕ~eϕ
)= r ~er + rθ~eθ + r sin (θ) ϕ~eϕ (3.112)
Podobne by sme zıskali aj ~r, pre skratenie vyrazov len napıseme vysledok:
~r =(r − rθ2 − rϕ2 sin2 (θ)
)~er +
(rθ + 2rθ − rϕ2 sin (θ) cos (θ)
)~eθ+
+(rϕ sin (θ) + 2rϕ sin (θ) + 2rθϕ cos (θ)
)~eϕ (3.113)
Kvoli d’alsım odvodeniam je dobre vediet’, ako sa vektorovo nasobia jednotlive jednotkove vektory:
~er × ~eθ = ~eϕ ~er × ~eϕ = −~eθ ~eθ × ~eϕ = ~er (3.114)
Ostatne nasobenia su bud’ nulove, ak sa jedna o dva rovnake jednotkove vektory, alebo s opacnymznamienkom, ak dva vektory vymenıme. Odvodıme vyjadrenie Coriolisovej sily:
−2m~ω × ~r =
= 2mω r ϕ sin2 (θ)~er + 2mω r ϕ sin (θ) cos (θ)~eθ − 2m(ω r θ cos (θ) + ω r sin (θ)
)~eϕ (3.115)
Na rade je vyjadrenie neprıjemneho clena, dvojiteho vektoroveho sucinu, ktory budeme potrebovat’ kvoliodstredivej sile:
~ω × ~r = ω r sin (θ)~eϕ (3.116)
−m~ω × (~ω × ~r ) = mω2r sin2 (θ)~er +mω2r sin (θ) cos (θ)~eθ = mω2r sin (θ) (sin (θ)~er + cos (θ)~eθ) (3.117)
Takyto vysledok by sme aj ocakavali - takato odstrediva sila smeruje kolmo na os otacania a ,,t’aha”objekty d’alej od osi. Jej vel’kost’ je:
|−m~ω × (~ω × ~r )| = mω2r sin (θ) (3.118)
teda naozaj platı, ze cım blizsie je objekt ku polom (teda θ sa blızi 0 alebo π), alebo cı blizsie je ku streduZeme, tym menej nan posobı odstrediva sila.
96

3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
Teraz mozeme po zlozkach napısat’ pohybove rovnice hmotneho bodu:
r − rθ2 − rϕ2 sin2 (θ) = −g + 2ω rϕ sin2 (θ) + ω2r sin2 (θ)
rθ + 2rθ − rϕ2 sin (θ) cos (θ) = 2ω r ϕ sin (θ) cos (θ) + ω2r sin (θ) cos (θ)
rϕ sin (θ) + 2rϕ sin (θ) + 2rθϕ cos (θ) = −2ω(r θ cos (θ) + r sin (θ)
) (3.119)
Tato sustava je samozrejme prıserne zlozita, nelinearna a pravdepodobne neriesitel’na vo vseobecnostianalyticky. Na nasledujucich riadkoch sa budeme venovat’ tomu, co mozno zanedbat’, co za zanedbaniamizvykne byt’, co je male, co je vel’ke a co tieto pojmy vlastne znamenaju. Ked’ sa logicky a z nadhl’adupozrieme na problem, ktory riesime, zistıme, ze oproti povodnemu problemu, teda vol’nemu padu, ocakavamelen male korekcie. Naprıklad typicke rychlosti, ktore dosahuje objekt pri vol’nom pade z rozumnej vysky(radovo do 100m) su
√2gh ≈ 50m/s. Typicke doby padu byvaju
√2h/g ≈ 5s. Ked’ sa pozrieme na
rovnicu (3.108), vidıme v nej oproti clenu, ktory cele padanie zaprıcinuje aj cleny, o ktorych predpokladame,ze ich efekt nebude prılis vel’ky. Tak naprıklad Coriolisova sila nejako zavisı od sucinu rychlosti a uhlovejrychlosti objektu, teda ak sa zameriavame na radovy odhad tohto efektu, stacı nam zobrat’ dopadovu rychlost’
prenasobenu uhlovou rychlost’ou rotacie Zeme,√
2ghω. Zem rotuje s uhlovou rychlost’ou priblizne 6 ·10−5m,z coho dostavame typicke zrychlenia zaprıcinene Coriolisovou silou 3 · 10−3m/s2. Typicke zrychlenia ododstredivej sily zase zistıme z vyrazu ω2R, kde R je radovo polomer Zeme (pretoze to je typicka vzdialenost’
od osi rotacie, ak nie sme blızko polov). Vyjde nam 2 · 10−2m/s2. Z tychto charakteristickych zrychlenıby nam malo byt’ jasne, ze riesenie sa nebude prılis odchyl’ovat’ od vol’neho padu na staticku Zem. Dotoho nahliadneme napr. tak, ze prenasobıme typicke zrychlenia typickym casom (a casom na druhu) a
porovname ich s typickymi rychlost’ami (a dlzkami). Typicke rychlosti padu sme uz zistili, typicke rychlostiv dosledku neinercialnych sıl su na urovni 10−3 − 10−2m/s, typicke vzdialenosti, do ktorych by tieto silymohli teleso zaniest’ su radovo 10−2 − 10−1m. Aj za takejto idealizacie vidıme, ze to je stale zanedbatel’neoproti rychlostiam padu resp. vysok, z ktorych teleso pada. Ked’ mame podozrenie tohto typu, ktore jenavyse podporene nechut’ou riesit’ nelinearnu sustavu, ktora nam vysla, je nacase uchylit’ sa ku procesu,ktory nazyvame linearizacia. Linearizacia je proces, pri ktorom sa riesene rovnice linearizuju. Co to presneznamena? Ako uz bolo spomenute, skumame vol’ne pady z vysok, ktore su zanedbatel’ne oproti polomeruZeme. To znamena, ze v suradnici r si vieme realne predstavit’, ze hlavnu ulohu hra polomer Zeme, vyska,z ktorej pust’ame teleso, bude mala oproti tomuto polomeru. Ak na zaciatku teleso spust’ame z vysky h,potom tvrdenie, je, ze h R, inak povedane, h/R 1. Velicinu h/R teda mozeme brat’ ako bezrozmernyparameter ε, ktory charakterizuje, ako dobra je aproximacia R ≈ r. Ako prve teda zavedieme suradnicu z,ktora meria polohu hmotneho bodu vzhl’adom na Zemsky povrch. Nech platı:
r = R+ z =⇒ r = z, r = z (3.120)
Lokalne teraz zaved’me v mieste (r = R, θ, ϕ) suradnicovu sustavu, ktorej z-zlozka je uz definovanavyssie. Zlozku x definujeme tak, ze bude v smere rovnobezkoy na vychod. Zlozka y uz nema na vyber, abytoto bola pravotociva baza, musı smerovat’ v smere poludnıka na sever.
Pre prvu rovnicu ukazeme, ako vyzera linearizacia v praxi. Najprv predpokladame, ze x a y su korekcieku statickosti pohybu v uhloch θ a ϕ28. To, ze ocakavame maly pohyb v θ a ϕ naznacıme priradenım:
θ → θ − 1
Ry =⇒ dθ = − 1
Rdy =⇒ θ = − 1
Ry, θ = − 1
Ry (3.121)
ϕ→ ϕ+1
R sin (θ)x =⇒ dϕ =
1
R sin (θ)dx =⇒ ϕ =
1
R sin (θ)x, ϕ =
1
R sin (θ)x (3.122)
28Vidno, ze pri takto zavedenych suradniciach x a y je pohyb vlastne lokalne linearny, no globalne by sa mala prıslusne menit’
suradnica θ a ϕ.
97

3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
x
yz
Z
Obrazok 3.24: Suradna sustava e sita na mieru padu na Zem. Os x mieri v smere rovnobezky, os y v smerepoludnıka a os z je kolma na povrch Zeme. Zemska os je Z, uhol, ktory zviera z a Z je Θ ∈ 〈0, π〉.
Nasleduje proces linearizacie rovnıc. Otazkou je, ktory efekt povazujeme za maly a ktory za podstatny.Ak sa dohodneme, ze ε je ten rad, ktoreho presnost’ nas zaujıma, neda sa vo vseobecnosti povedat’, ci ε/10je uz male, vieme sa bavit’ len v termınoch mocnın ε. Ak sa v rovniciach objavı cokol’vek, pri com bude stat’
clen ε2, ε3 a vyssie, vieme, ze tieto mozeme s kl’udnym svedomım vyhodit’. Ak je totiz ε radu 10−5 a toto jepresnost’, ktora nas zaujıma, potom ε2 je oproti nemu desne male, resp. nemeratel’ne. S touto myslienkoudosadıme vyrazy pre r, θ a ϕ do prvej rovnice a upravujeme ju:
r − rθ2 − rϕ2 sin2 (θ) = −g + 2ω rϕ sin2 (θ) + ω2r sin2 (θ)
z − z(
1
Ry
)2
− (R+ z)
(1
R sin (θ)x
)2
sin2 (θ) =
= −g + 2ω (R+ z)1
R sin (θ)x sin2 (θ) + ω2 (R+ z) sin2 (θ)
z − 1
hx2ε− 1
h2
(y2z + x2z
)ε2 = −g + 2ω sin x (θ) + ω2 (R+ z) sin2 (θ) +
2ω x z sin (θ)
hε
z = −g + 2ω sin x (θ) + ω2 (R+ z) sin2 (θ) +((((
(((((((hhhhhhhhhhh
1
h
(2ω x z sin (θ) + x2
)ε +
XXXXXXXX
1
h2
(y2z + x2z
)ε2
Dostavame tak linearizovanu prvu rovnicu:
z = −g + 2ω sin x (θ) + ω2 (R+ z) sin2 (θ) (3.123)
Tato rovnica, aj ked’ uz v linearnej podobe, podstupi este posledne zanedbanie. Vsimneme si, ze ak ωje radu 10−5s a R radu 106m, potom clen ω2R je vel’mi maleho radu. Trochu to zachranuje rozmer Zeme,no druhy clen v zatvorke, z, je radu 102m, co je zanedbatel’ne oproti R. Aj ked’ je tato rovnica linearna, clenz z pravej strany zahodıme, cım si podstatne zjednodusıme riesenie29.
29Vysledna sustava s prıtomnym z na pravej strane je tvaru:
~r = A~r +B~r + ~P (3.124)
kde A a B su matice a ~P je konstantny vektor. Riesenie takejto sustavy zahrna simultannu diagonalizaciu matıc A a B, co jeproces, ktoremu je lepsie sa vyhnut’. Ak vsak zahodıme clen B~r, stacilo by diagonalizovat’ len jednu maticu (ako uvidıme, ajtomuto sa mozno vyhnut’), co znacne zjednodusuje riesenie.
98

3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
Napıseme celu linearizovanu sustavu aj s pociatocnou podmienkou - na zaciatku objekt ,,stojı” vo vyskeh nad Zemou:
x = 2ω y cos (θ)− 2ω z sin (θ)
y = −2ω x cos (θ)− ω2R sin (θ) cos (θ)
z = −g + 2ω x sin (θ) + ω2R sin2 (θ)
~r (0) =(0, 0, h
)~r (0) = ~0
(3.125)
Vsimnime si, ze druha a tretia rovnica obsahuje na pravej strane z riesenych funkciı len x, l’ave stranysu druhe derivacie funkciı, ktore sa objavuju na pravej strane prvej rovnice. Zintegrujeme teda s ohl’adomna pociatocne podmienky druhu a tretiu rovnicu v case:
y = −2ω x cos (θ)− ω2R sin (θ) cos (θ) t
z = −gt+ 2ω x sin (θ) + ω2R sin2 (θ) t(3.126)
Tieto vyrazy dosadıme do (3.125) (I):
x+ 4ω2x = 2ω(g − ω2R
)sin (θ) t (3.127)
Riesenie tejto rovnice aj s ohl’adom na pociatocne podmienky bude:
x (t) =g − ω2R
2ωsin (θ)
[t− 1
2ωsin (2ωt)
](3.128)
Pouzitım (3.126) a okrajovych podmienok (3.125) zıskame y a z:
y (t) =1
4sin (2θ)
[( g
ω2−R
)sin2 (ω t)− g t2
]z (t) = h− 1
2g cos2 (θ) t2 − g − ω2R
2ω2sin2 (θ) sin2 (ωt)
Dostali sme teda kompletne riesenie padu na rotujucu zem:
x (t) =g − ω2R
2ωsin (θ)
[t− 1
2ωsin (2ωt)
]y (t) =
1
4sin (2θ)
[( g
ω2−R
)sin2 (ω t)− g t2
]z (t) = h− 1
2g cos2 (θ) t2 − g − ω2R
2ω2sin2 (θ) sin2 (ωt)
(3.129)
Pod’me si rozobrat’ jednotlive zlozky. V zlozke x vidıme, ze v prvom rade ω t sa nic nedeje:
t− 1
2ωsin (2ωt) = t− 1
2ω
(2ωt− (2ωt)
2
2!+ · · ·
)=
1
ω
(ω t)
2+O
[(ω t)
3]
(3.130)
x (t) =g − ω2R
2ω2sin (θ) (ω t)
2+O
[(ω t)
3]
(3.131)
Prvotny pohyb v suradnici x v case teda bude parabolicky, cleny vyssieho radu predstavuju takmernepostrehnutel’nu odchylku. Ako vidıme, clen sin (θ) obmedzı pohyb v suradnici x na poloch. Treba vsakpodotknut’, ze odvodene rovnice su dostatocne presne az v istej vzdialenosti od polov, pretoze nami zvolenesuradnice maju na poloch singularitu30.
30Neda sa napr. povedat’, kam mieri suradnica y na poloch.
99
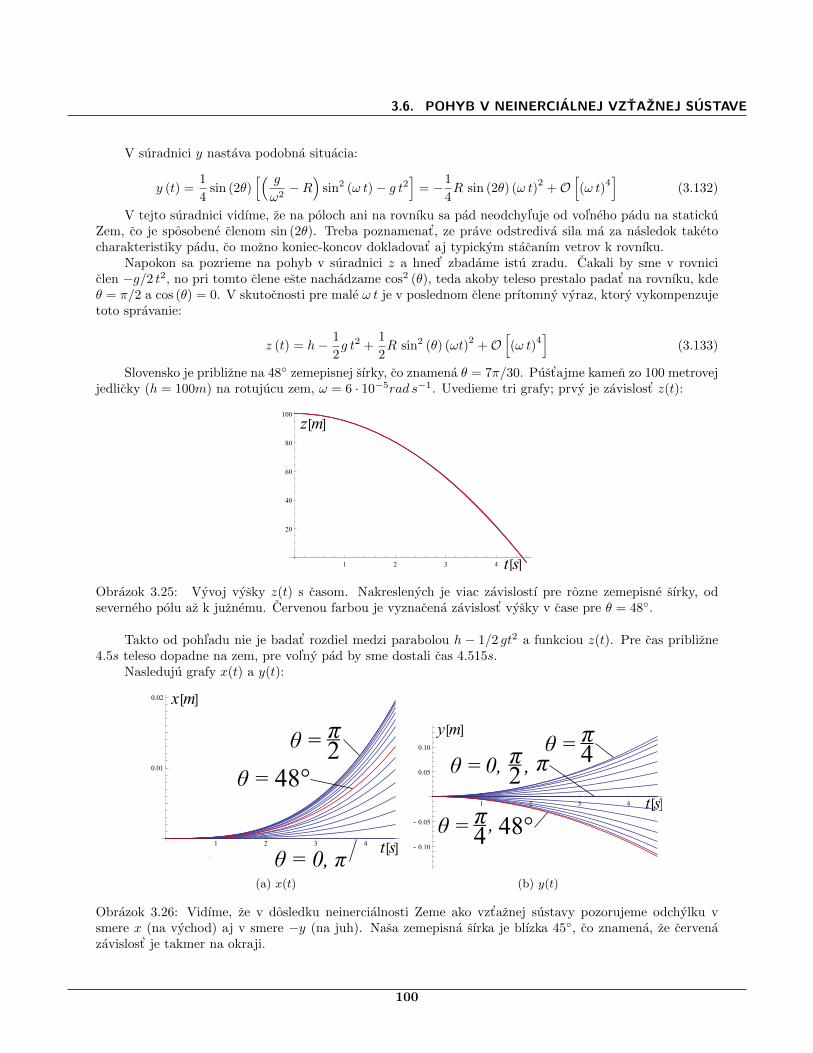
3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
V suradnici y nastava podobna situacia:
y (t) =1
4sin (2θ)
[( g
ω2−R
)sin2 (ω t)− g t2
]= −1
4R sin (2θ) (ω t)
2+O
[(ω t)
4]
(3.132)
V tejto suradnici vidıme, ze na poloch ani na rovnıku sa pad neodchyl’uje od vol’neho padu na statickuZem, co je sposobene clenom sin (2θ). Treba poznamenat’, ze prave odstrediva sila ma za nasledok taketocharakteristiky padu, co mozno koniec-koncov dokladovat’ aj typickym stacanım vetrov k rovnıku.
Napokon sa pozrieme na pohyb v suradnici z a hned’ zbadame istu zradu. Cakali by sme v rovniciclen −g/2 t2, no pri tomto clene este nachadzame cos2 (θ), teda akoby teleso prestalo padat’ na rovnıku, kdeθ = π/2 a cos (θ) = 0. V skutocnosti pre male ω t je v poslednom clene prıtomny vyraz, ktory vykompenzujetoto spravanie:
z (t) = h− 1
2g t2 +
1
2R sin2 (θ) (ωt)
2+O
[(ω t)
4]
(3.133)
Slovensko je priblizne na 48 zemepisnej sırky, co znamena θ = 7π/30. Pust’ajme kamen zo 100 metrovejjedlicky (h = 100m) na rotujucu zem, ω = 6 · 10−5rad s−1. Uvedieme tri grafy; prvy je zavislost’ z(t):
z m[ ]
t s[ ]
Obrazok 3.25: Vyvoj vysky z(t) s casom. Nakreslenych je viac zavislostı pre rozne zemepisne sırky, odseverneho polu az k juznemu. Cervenou farbou je vyznacena zavislost’ vysky v case pre θ = 48.
Takto od pohl’adu nie je badat’ rozdiel medzi parabolou h − 1/2 gt2 a funkciou z(t). Pre cas priblizne4.5s teleso dopadne na zem, pre vol’ny pad by sme dostali cas 4.515s.
Nasleduju grafy x(t) a y(t):
t s[ ]
x m[ ]
θ = 0, π
θ = π2_
θ = 48°
(a) x(t)
θ = π2_
0, π,θ = π4_
θ = π4_
,t s[ ]
y m[ ]
(b) y(t)
Obrazok 3.26: Vidıme, ze v dosledku neinercialnosti Zeme ako vzt’aznej sustavy pozorujeme odchylku vsmere x (na vychod) aj v smere −y (na juh). Nasa zemepisna sırka je blızka 45, co znamena, ze cervenazavislost’ je takmer na okraji.
100
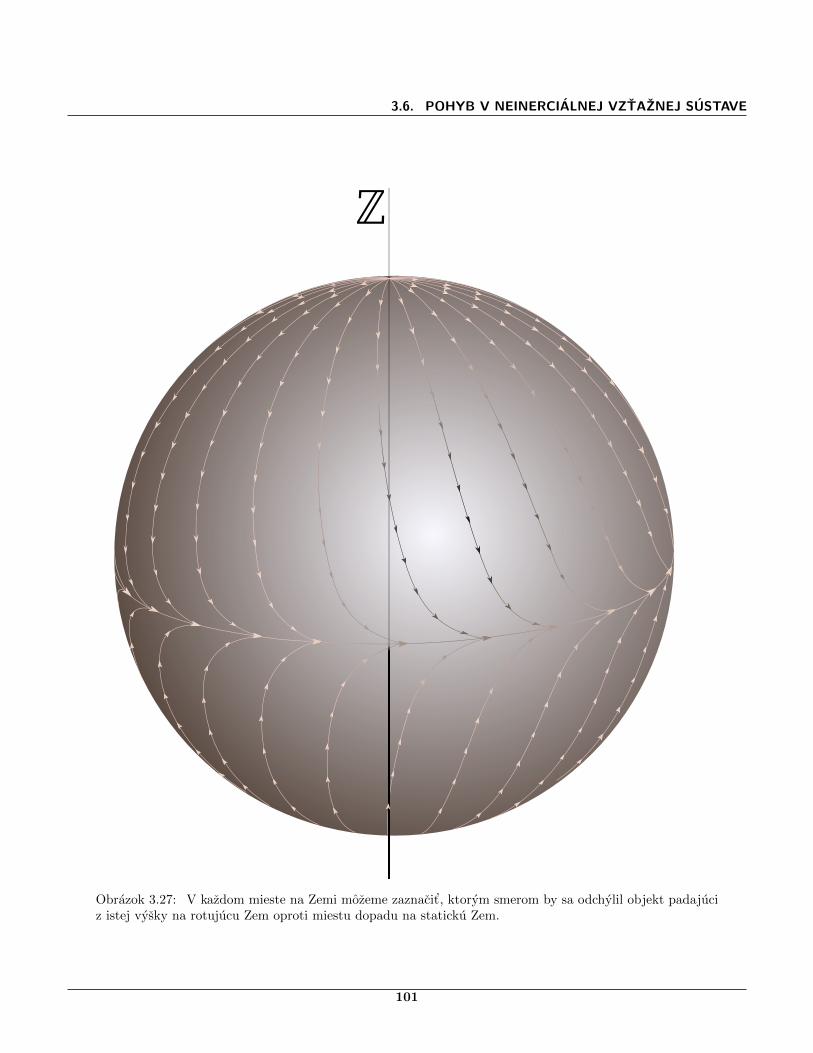
3.6. POHYB V NEINERCIALNEJ VZTAZNEJ SUSTAVE
Z
Obrazok 3.27: V kazdom mieste na Zemi mozeme zaznacit’, ktorym smerom by sa odchylil objekt padajuciz istej vysky na rotujucu Zem oproti miestu dopadu na staticku Zem.
101

3.7. TUHE TELESO
3.7 Tuhe teleso
Pod tuhym telesom rozumieme dokonale pevne teleso, ktore nepodlieha deformaciam pri silovom posobenı.Dosledok tejto definıcie je, ze vzdialenost’ medzi akymikol’vek dvoma bodmi telesa sa zachovava aj priposobenı vonkajsıch sıl.
3.7.1 Kineticka energia, rotacna energia a moment zotrvacnosti tuheho telesa
V tuhom telese je vzdy rozumne zvolit’ si nejaky referencny bod. Majme teda tuhe teleso a v nomreferencny bod, ktory ma polohu ~R(t) (teleso sa moze vselijako hybat’, tato poloha je teda zavisla od casu).Od tohto bodu mozeme urcovat’ polohy inych bodov v telese.
L R t
r t
ρ t →
→
→
k
k
( )
( )
( )
Obrazok 3.28: Tuhe teleso.
Kineticku energiu tohto telesa v laboratornej sustave urcıme ako:
T =1
2
∑k
mk ~ρ2k (3.134)
Z obrazku (3.28) vidıme, comu je rovny vektor ~ρ:
~ρk = ~R+ ~rk =⇒ ~ρ 2k =
(~R+ ~rk
)2
= ~R 2 + 2 ~R · ~rk + ~r 2k (3.135)
T =1
2
∑k
mk︸ ︷︷ ︸=M
~R 2 +M ~R · 1
M
∑k
mk~rk︸ ︷︷ ︸~rT
+1
2
∑k
mk~r2k (3.136)
Vidıme, ze druhy clen obsahuje zmenu polohy t’aziska voci referencnemu bodu. Ak vsak referencny bod~R stotoznıme s t’aziskom, potom stredny clen v kinetickej energii vypadne:
T =1
2M ~R 2 +
1
2
∑k
mk~r2k (3.137)
Teraz uz plati, ze ~R je poloha t’aziska a jednotlive polohy ~rk su vzhl’adom na toto t’azisko. No ked’zerozoberame tuhe teleso, polohy ~rk nemozu robit’ nic viac, ako pohybovat’ sa po sfere okolo ~R. Ak by menilisvoju vzdialenost’ od t’aziska, uz by sa nejednalo o tuhe teleso. Z predoslej casti o neinercialnych vzt’aznychsustavach vieme, ze ak sa nejaky vektor pohybuje po sfere, jeho pohyb mozno opısat’ nasledujucou rovnicoupre ~ω(t):
~rk = ~ω × ~rk (3.138)
102

3.7. TUHE TELESO
V sulade s touto rovnicou prejde kineticka energia telesa na tvar:
T =1
2M ~R 2 +
1
2
∑k
mk (~ω × ~rk)2
(3.139)
Prvy clen je kineticka energia hmotneho bodu s hmotnost’ou celeho telesa sustredenej v t’azisku. Druhyclen musı predstavovat’ rotacnu energiu tuheho telesa:
Trot. =1
2
∑k
mk (~ω × ~rk)2
=Davis cup identity· · · · · · · · · · · · =
1
2
∑k
mk
(~ω 2~r 2
k − (~ω · ~rk)2)
=
=1
2ωiωj
∑k
mk
[δij~r
2k − (~rk)i (~rk)j
]Zistili sme, ze rotacna energia telesa je rovna:
Trot. =1
2ωiωjJij ; Jij =
∑k
mk
[δij~r
2k − (~rk)i (~rk)j
](3.140)
Tenzor Jij budeme volat’ tenzor momentu zotrvacnosti. Jeho vyjadrenie v integralnom tvare bude:
Jij =
˚
V
[δij~r
2 − xixj]
dm =
˚
V
ρ (~r )[δij~r
2 − xixj]
dV (3.141)
kde V je objem, ktory zabera teleso. Je zjavne, ze tenzor momentu zotrvacnosti je symetricky.Moment hybnosti ~L pocıtame ako:
Li =∑k
(~rk × ~pk)i =∑k
mk [~rk × (~ω × ~rk)]i = · · · = ωj∑k
mk
[δij~r
2k − (~rk)i (~rk)j
]= Jijωj (3.142)
Vsimnime si istu analogiu medzi hybnost’ou a momentom hybnosti. Hybnost’ je dana sucinom hmotnostia rychlosti telesa, kde hmotnost’ je skalar. Moment hybnosti je dany ako sucin momentu zotrvacnosti a uhlovejrychlosti, kde moment zotrvacnosti je tenzor. Teda vo vseobecnosti, kym hybnost’ a rychlost’ maju rovnakysmer a orientaciu (pretoze hmotnost’ je kladna konstanta), moment hybnosti ma vo vseobecnosti iny smer,ako uhlova rychlost’. Stale vsak platı, ze vzt’ah medzi momentom hybnosti a uhlovou rychlost’ou je linearny.Moment zotrvacnosti teda mozeme chapat’ ako linearny operator operujuci na uhlovych rychlostiach, ktorehovysledkom su momenty hybnosti. M-nasobok rychlosti sa tiez istym sposobom da chapat’ ako linearnyoperator, ak tento nasobok vhodne zapıseme:
~p (~v) = m~v ~L (~ω ) = J ~ω
pi = mvi = mδijvj Li = Jijωj(3.143)
Vidıme, ze v prıpade hybnosti hra ulohu linearneho operatora tenzor mδij , v prıpade momentu hybnostije nım tenzor Jij .
Podobnu analogiu vieme najst’ medzi kinetickou a rotacnou energiou. Kym kineticka energia je (1/2)m~v 2,rotacna energia je (1/2)Jijωiωj , teda ma tvar kvadratickej formy. Kineticka energia je tiez kvadraticka forma,mozeme to nahliadnut’ znovu spravnym (trochu zbytocnym) rozpısanım:
T (~v) =1
2m~v 2 Erot. (~ω) =
1
2~ωJ~ω
T (~v) =1
2vimδijvj Erot. (~ω) =
1
2ωiJijωj
(3.144)
V prıpade kinetickej a rotacnej energie su prıslusne matice kvadratickych foriem rovnake, ako v prıpadehybnosti a momentu hybnosti.
103
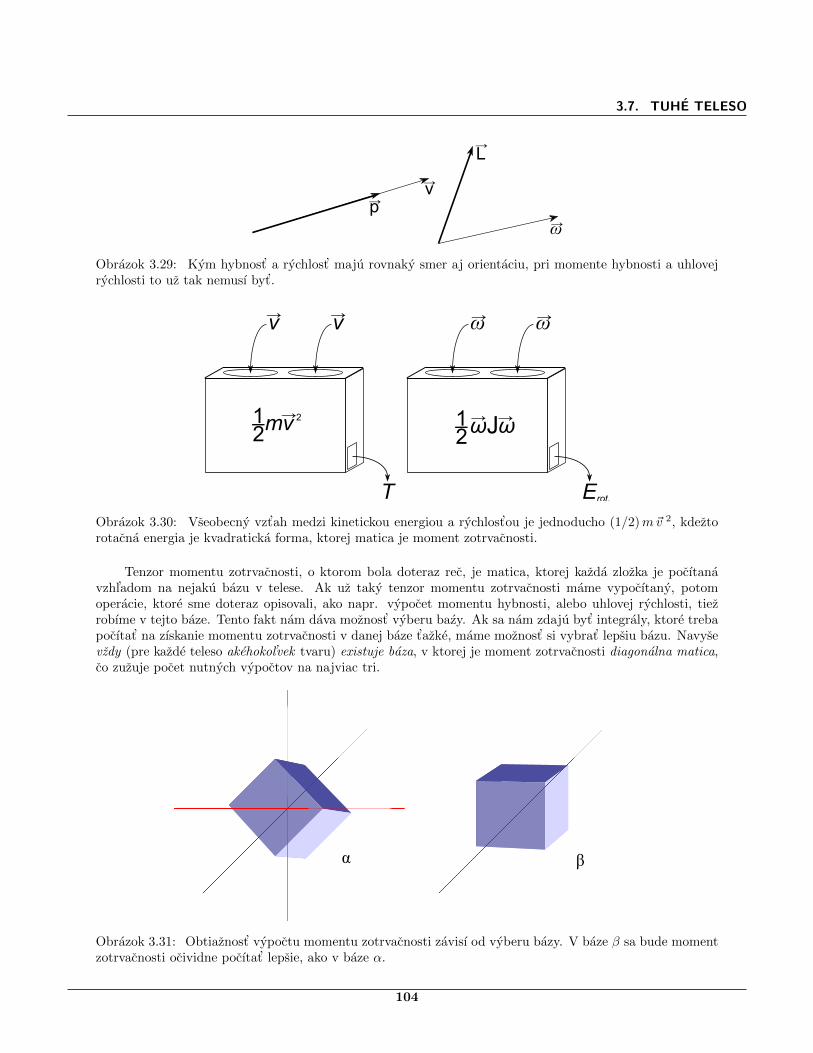
3.7. TUHE TELESO
pv
→
→
L
ω
→
→
Obrazok 3.29: Kym hybnost’ a rychlost’ maju rovnaky smer aj orientaciu, pri momente hybnosti a uhlovejrychlosti to uz tak nemusı byt’.
ω
→ω
→v→
v→
T Erot.
12mv_ 2→ 1
2_→ω ω
→J
Obrazok 3.30: Vseobecny vzt’ah medzi kinetickou energiou a rychlost’ou je jednoducho (1/2)m~v 2, kdeztorotacna energia je kvadraticka forma, ktorej matica je moment zotrvacnosti.
Tenzor momentu zotrvacnosti, o ktorom bola doteraz rec, je matica, ktorej kazda zlozka je pocıtanavzhl’adom na nejaku bazu v telese. Ak uz taky tenzor momentu zotrvacnosti mame vypocıtany, potomoperacie, ktore sme doteraz opisovali, ako napr. vypocet momentu hybnosti, alebo uhlovej rychlosti, tiezrobıme v tejto baze. Tento fakt nam dava moznost’ vyberu bazy. Ak sa nam zdaju byt’ integraly, ktore trebapocıtat’ na zıskanie momentu zotrvacnosti v danej baze t’azke, mame moznost’ si vybrat’ lepsiu bazu. Navysevzdy (pre kazde teleso akehokol’vek tvaru) existuje baza, v ktorej je moment zotrvacnosti diagonalna matica,co zuzuje pocet nutnych vypoctov na najviac tri.
α
β
Obrazok 3.31: Obtiaznost’ vypoctu momentu zotrvacnosti zavisı od vyberu bazy. V baze β sa bude momentzotrvacnosti ocividne pocıtat’ lepsie, ako v baze α.
104

3.7. TUHE TELESO
Teraz si ukazeme dokaz tvrdenia, ze vo vhodnej baze ma moment zotrvacnosti diagonalny tvar. Najprvdokazeme, ze pri standardnom otocenı bazy e (t.j. otocenı kazdeho jeho prvku ~ei) pomocou ortogonalnejmatice A sa matica Jij transformuje podl’a klasickeho vzt’ahu: J → AJ A−1. Ortogonalna matica A musı
splnat’ vzt’ah:
ATA = AAT = I3 =⇒ AT = A−1
AikATkj = ATikAkj = δij =⇒ ATij = A−1
ij
(3.145)
kde transpozıcia v indexoch zamiena poradie indexov:
ATij = Aji (3.146)
Vychadzame z definıcie Jij v baze e:
Jij =
˚
V
(δij~r
2 − xixj)
d3x (3.147)
Rozmyslıme si, ze po otocenı bazy e do novej bazy: ~ei → A~ei sa aj kazdy vektor ~r otocı podl’a rovnakehovzt’ahu: ~r → A~r. Tento fakt teda vyuzijeme v definıcii Jij (3.147):
~r → A~r · · · xi → Aijxj =⇒ Jij →˚
V
(δijAabxbAacxc −AimxmAjnxn) d3x (3.148)
Vyraz pod integralom postupne upravujeme za vyuzitia (3.145) a (3.146):
δijAabxbAacxc −AimxmAjnxn = δij ATbaAac︸ ︷︷ ︸=δbc
xbxc −Aimxmxn ATnj︸︷︷︸=A−1
nj
= δij~r2 −AimxmxnA−1
nj (3.149)
V druhom clene uz vidıme ziadany jav, maticu A zl’ava a inverznu maticu A−1 sprava. Dane maticevsak chybaju v prvom clene. Ako sme mali moznost’ si overit’, na skalar ~r 2 transformacia nema ziadenefekt31, teda ani pripisovanie matıc nema ziaden efekt. Inu vec, ktoru sme diskretne preskocili, je fakt, ze ajtenzory treba pri zmene bazy oblozit’. Vo vyjadrenı Jij je prıtomny tenzor δij , na ktory sme zabudli. No pooblozenı tenzora δij maticou transformacie by sme rychlo zistili, ze ani s tymto tenzorom transformacia nicneurobı, mozeme teda podl’a l’ubovole pripisovat’ transformacne matice zl’ava (a prıslusnu inverznu sprava)bez zmeny vyrazov. Akokol’vek sa na to teda pozrieme, teda bud’ ako transformacia δij do inej bazy, aleboumele pripısanie A zl’ava a A−1 sprava32, dostaneme:
δij~r2 −AimxmxnA−1
nj = AimδmnA−1nj ~r
2 −AimxmxnA−1nj = Aim
(δmn~r
2 − xmxn)A−1nj (3.150)
~r → A~r =⇒ Jij → Aim
˚
V
(δmn~r
2 − xmxn)
d3xA−1nj = AimJmnA
−1nj (3.151)
31V teorii relativity by sme povedali, ze ~r 2 sa transformuje ako skalar, co znie trochu paradoxne vzhl’adom na to, ze ~r 2 uz jeskalar (v zmysle ze ho tak volame).
32Schematicky nazov tejto metody je znasilnenie jednotkou (v tomto prıpade jednotkovou maticou). Nemenej obl’ubenametoda v analyze a algebre je znasilnenie nulou, pretoze ako vsetci vieme, nulu mozeme beztrestne hocikde pricıtat’ a odcıtat’,tak ako mozeme jednotkou beztrestne nasobit’ a delit’.
105

3.7. TUHE TELESO
Uz sme dokazali, ze pri otocenı suradnicovej sustavy maticou A sa tenzor momentu zotrvacnosti trans-formuje ziadanym33 sposobom:
~r → A =⇒ J → AJ A−1 (3.152)
Teraz vsak mame navod priamo na to, ako hl’adat’ prıslusnu ,,dobru” telesovu bazu, v ktorej bude tenzormomentu zotrvacnosti diagonalny. V linearnej algebre totiz platı veta: ku stvorcovej matici J existuje maticaA taka, ze:
J = ADA−1 (3.153)
kde A je matica prechodu pozostavajuca z vlastnych vektorov J a D je diagonalna matica s vlastnymihodnotami J na diagonale. V nasej situacii platı, ze J je diagonalizovatel’na ortogonalnou maticou34, co supresne tie matice, ktorymi sprostredkuvame otacanie bazy.
Vysledok tejto analyzy je cenny aj v nasledujucom zmysle: ked’ sa rozhodneme prepocıtat’ tenzor mo-mentu zotrvacnosti do inej bazy, nemusıme znovu pocıtat’ prıslusne integraly, stacı poznat’ maticu prechodumedzi bazami35.
Pozrime sa teraz na to, ake rozne tvary telies z hl’adiska ich momentu zotrvacnosti mozeme dostat’.Moment zotrvacnosti je uz vypocıtany vzhl’adom na dobru telesovu bazu, v ktorej ma diagonalny tvar,J = diag (J1, J2, J3). V skutocnosti teda mozu nastat’ len 4 moznosti:
1. J1 = J2 = J3: ide o telesa napohl’ad pravidelneho tvaru, kde pohl’ad z roznych osı sa neda rozoznat’,napr. gul’a, ale aj kocka, pravidelny stvorsten, osemsten, dvanast’sten, ... Tieto telesa volame sferickyzotrvacnık.
2. J1 = J2 J3: je to teleso tvaru vel’mi tenkej palicky, ktore je ulozene na osi z. Volame ho rotator.3. J1 = J2, J3 > 0: ide o telesa, ktore maju nezanedbatelne rozlozenie hmoty aj mimo osi z (narozdiel
od rotatora), no ich tvar je tiez odolny voci zamene prvych dvoch osı. Jedna sa napr. o kuzel’ postaveny vsmere osi z, hranol s podstavou tvaru stvorca, valec, ... Tieto telesa volame symetricky zotrvacnık.
4. J1 6= J2 6= J3 6= J1 je to tak nepravidelne teleso, aby jeho zlozky momentu zotrvacnosti nebolirovnake, teda napr. stolicka, postel’, bicykel, ... Teleso s takymto momentom zotrvacnosti volame asymetrickyzotrvacnık.
Tieto 4 moznosti pokryvaju vsetky mozne tvary telies, cokol’vek ine (napr. J1 0, J2 = J3, teda tenkapalicka na osi x) mozno dostat’ rotaciou niektoreho z uz opısanych telies (teda taku tenku palicku ulozenuna osi x tiez budeme volat’ rotator a je to teleso, ktore spada do kategorie 2.).
33Lepsie povedane, ocakavanym sposobom. Ono to nie je tak, ze by si tenzory mohli vyberat’, ako sa budu transformovat’,my to od nich cakame. Ak to nerobia, su neslusne, je to nieco ako ked’ clovek nepozdravı, ked’ prıde na navstevu. Nast’astie sazda, ze v tomto prıpade nam spadol do lona slusny tenzor (inac by bolo vel’mi bolestive kazde jeho prepocıtanie do inej bazy).
34Tento fakt vyplyva z toho, ze J je realna a symetricka matica.35Nasobenie matıc sa vo vseobecnosti povazuje za jednoduchsiu ulohu ako pocıtanie integralov. Ospravedlnujeme sa
extremistom, ktorı obl’ubuju vıkendovy masochizmus v podobe konzumovania Demidovica.
106
3.7. TUHE TELESO
3.7.2 Steinerova veta a veta o kolmych osiach*
Platı nasledujuca veta (Steinerova) o rovnobeznych osiach36: Moment zotrvacnosti tuheho telesa podl’aosi O prechadzajucej jeho t’aziskom oznacıme J , vid’ obrazok (3.32). Pre danu os o rovnobeznu s osou O jemoment zotrvacnosti rovny:
j = J +M ~R 2 (3.154)
kde R je vzdialenost’ medzi osami o a O a M je hmotnost’ uvazovaneho telesa.Dokaz:Moment zotrvacnosti podl’a osi o pocıtame podl’a vzt’ahu:
j =
˚
V
~r ′2dm
kde r′ je vzdialenost’ elementu hmoty tuheho telesa od osi o a platı pren kosınusova veta:
~r ′2 = ~r 2 + ~R 2 − 2~R · ~r = ~r 2 + ~R 2 − 2∣∣∣~R∣∣∣ |~r | cos (θ)
j =
˚
V
(~r + ~R
)2
dm =
˚
V
~r 2dm+ ~R 2
˚
V
dm− 2∣∣∣~R∣∣∣˚
V
|~r | cos (θ) dm
V prvom clene spoznavame povodny moment zotrvacnosti, stredny clen udava ~R 2 - nasobok hmotnostitelesa. V poslednom si vsimneme, ze vyraz |~r | cos (θ) vlastne udava priemet vektora ~r do osi spajajucej O so. Tento integral teda udava M - nasobok priemetu (do osi spajajucej O a o) vzdialenosti t’aziska telesa odosi O, co je vsak nula, pretoze os O prechadza t’aziskom.
j = J +M ~R 2
Ako vidıme, Steinerova veta vlastne hovorı o tom, ze moment zotrvacnosti okolo osi rovnobeznej sosou prechadzajucou t’aziskom, je rovny povodnemu momentu zotrvacnosti zvacsenemu o hodnotu momentuzotrvacnosti hmotneho bodu hmotnosti M vzdialenemu R od osi otacania (akoby sme cele teleso skoncen-trovali na jednu os, alebo do jedneho bodu).
36Parallel axis theorem.
107
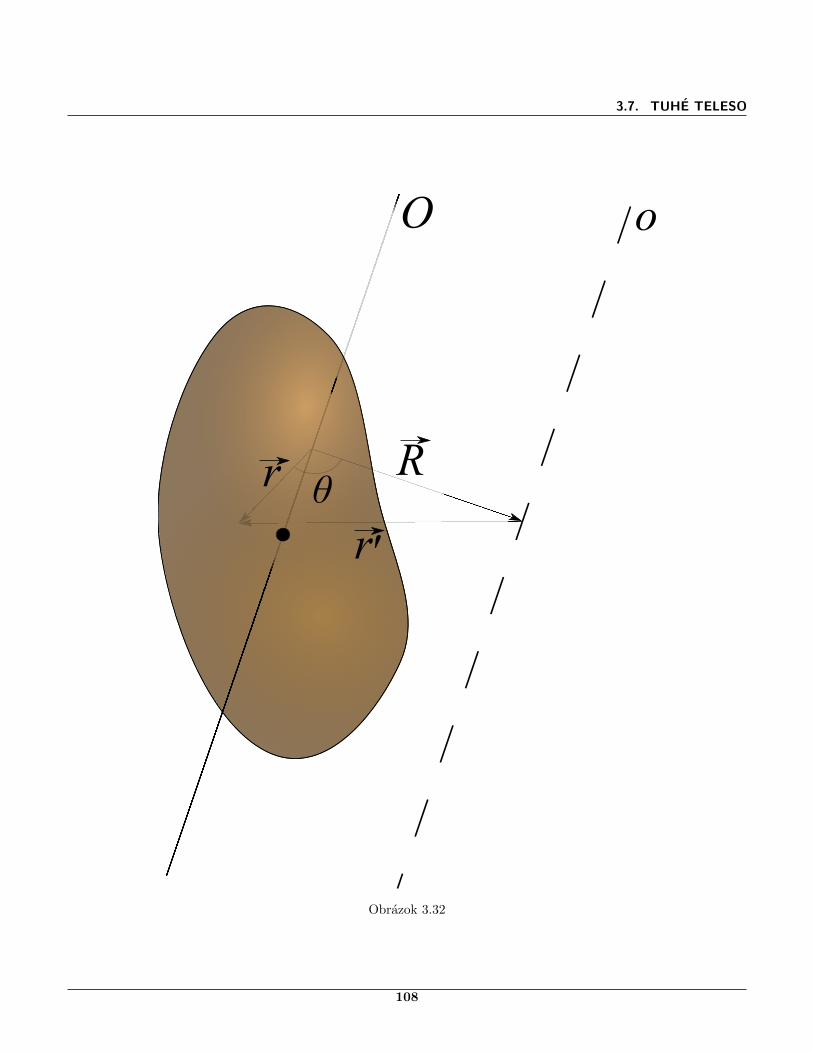
3.7. TUHE TELESO
O o
Rr
r
θ
'
Obrazok 3.32
108

3.7. TUHE TELESO
Platı nasledujuca veta o kolmych osiach37: t’aziskom daneho planarneho telesa prechadzaju dve navzajomkolme osi x a y leziace v jeho rovine, Prıslusne momenty zotrvacnostı vzhl’adom na tieto osi oznacıme Jx aJy. Moment zotrvacnosti Jz podl’a osi z kolmej na x aj y, taktiez prechadzajucej t’aziskom telesa je rovnysuctu momentov zotrvacnosti Jx a Jy:
Jz = Jx + Jy (3.155)
Dokaz: pocıtajme vyraz Jx + Jy v baze tvorenej osami x, y a z:
Jx + Jy =
˚
V
(y2 + z2
)dm+
˚
V
(x2 + z2
)dm
Ked’ze hmota telesa je rozlozena len v rovine xy, objem V je mnozina bodov, pre ktore urcite platız = 0. Z oboch integralov teda tento clen vymazeme (pretoze integrujeme len cez podmnozinu roviny z = 0)a dostaneme tak vyraz:
Jx + Jy =
˚
V
y2dm+
˚
V
x2dm =
˚
V
(x2 + y2
)dm = Jz
x
y
z
Obrazok 3.33
Vetu o kolmych osiach mozno jednoducho rozsırit’ aj na telesa, ktorych hmotnost’ nie je rozlozena vjednej rovine. V takom prıpade sa vratime ku vyrazu Jx + Jy:
Jx + Jy =
˚
V
(y2 + z2
)dm+
˚
V
(x2 + z2
)dm =
˚
V
(x2 + y2
)dm+
˚
V
2z2dm (3.156)
Prvy integral udava moment zotrvacnosti okolo osi z, druhy integral ma nezapornu podintegralnufunkciu v celej oblasti integrovania. Pre teleso, ktore je rozlozene v priestore dokonca platı, ze podintegralnafunkcia je kladna. Z toho dostavame trojuholnıkovu nerovnost’ pre momenty zotrvacnosti okolo navzajomkolmych osı:
Jx + Jy ≥ Jz (3.157)
Rovnost’ nastava, ak je hmotnost’ telesa rozlozena v jednej rovine.
37Perpendicular axis theorem
109

3.7. TUHE TELESO
3.7.3 Kinematika vol’neho sferickeho zotrvacnıka
Ako uz bolo spomenute, jedna sa o telesa pravidelneho tvaru vo vsetkych osiach, napr. gul’u, kocku, ...Tieto telesa maju zaujımavu vlastnost’ a to, ze ich moment zotrvacnosti je rovnaky v kazdej baze, ktoru bysme si v telese vybrali. Podl’a obrazku (3.31) by sa zdalo, ze kocka ma iny moment zotrvacnosti v inychbazach, no nie je tomu tak. Tato vlastnost’ sa da jednoducho ukazat’ aj vseobecne. Majme tenzor momentuzotrvacnosti nejakeho telesa v niektorej baze, v ktorej ma tento tenzor diagonalny tvar. Mozeme pre nehopısat’:
Jij = Jδij (3.158)
Prechod do inej bazy (napr. z bazy ε do bazy e) sa deje pomocou matice rotacie A:
~ei = Aij~εj (3.159)
Rovnakym sposobom sa transformuje moment zotrvacnosti J na moment zotrvacnosti J ′ v novej baze:
J ′ij = Aai︸︷︷︸=(AT )ia
AbjJδab =(AT)iaJδabAbj = J
(AT)iaAaj = Jδij
J ′ = J (3.160)
Pre taketo telesa ma moment hybnosti vzdy rovnaky smer, ako uhlova rychlost’:
Li = Jijωj = Jδijωj = Jωi
~L = J~ω ~L ‖ ~ω (3.161)
Nudnost’ sferickeho zotrvacnıka demonstruje prıklad o vol’nom sferickom zotrvacnıku. Ked’ze je vol’ny,neposobia nan ziadne momenty sıl a jeho moment hybnosti je konstantny. V laboratornej baze je momentzotrvacnosti rovnaky, ako v telesovej a moment hybnosti ma rovnaky smer, ako uhlova rychlost’. Tym padomzvonku pozorujeme, ze teleso sa maximalne ako celok pohybuje niektorym smerom rovnomerne priamociaroa vykonava pritom rovnomerny otacavy pohyb okolo niektorej pevnej osi. Ako uvidıme, vol’ny symetrickyzotrvacnık bude vykonavat’ precesiu, na jej popis vsak potrebujeme zaviest’ d’alsie pojmy na opis rotacietelesa (Eulerovy uhly) a odvodit’ prıslusne rovnice (Eulerove rovnice).
L = jω
→ →
Obrazok 3.34: Rotacia vol’neho sferickeho zotrvacnıka. Moment hybnosti ~L ma rovnaky smer aj orientaciu,ako uhlova rychlost’ ~ω.
110

3.7. TUHE TELESO
3.7.4 Eulerove rovnice pre rotaciu tuheho telesa, Eulerove uhly
Eulerove dynamicke rovnice
Vieme, ze vzt’ah medzi momentom hybnosti a momentom sily v laboratornej sustave e je:
~L = Li~ei =⇒ ~L = ~M (3.162)
V telesovej sustave ε (dobre zvolenej a pevne spojenej s rotujucim telesom) dostavame podl’a uz razzistenych skutocnostı:
~L = Li~εi =⇒ ~L = Li~εi + Li ~εi︸︷︷︸~ω×~εi
= Li~εi + εijkLiωj~εk = Li~εi + εibj ~εiLbωj =(Li + εibjLbωj
)~εi (3.163)
Z toho pre moment sily vyplyva
Mi = Li + εijkωjLk (3.164)
Ked’ze pozname vzt’ah medzi momentom hybnosti a momentom zotrvacnosti, Li = Jijωj , mozememoment sily pısat’ ako:
Mi = Jijωj + εijkωjJkmωm (3.165)
Ked’ze Jij je vo vhodnej telesovej baze, je to diagonalna matica, J = diag(J1, J2, J3), a pre jednotlivezlozky momentu sily dostavame jednoduche vzt’ahy:
M1 = J1ω1 + ω2ω3 (J3 − J2)
M2 = J2ω2 + ω1ω3 (J1 − J3)
M3 = J3ω3 + ω1ω2 (J2 − J1)
(3.166)
Tieto vzt’ahy volame Eulerove dynamicke rovnice pre rotacny pohyb. L’ave strany su zname veliciny,zlozky momentu sily (tak ako v Newtonovej rovnici pozname samotnu silu) urcene vzhl’adom na dane telesoveosi, prave strany obsahuju nezname zlozky uhlovej rychlosti, pre ktore sa tieto rovnice riesia. Tieto uhloverychlosti nie su vel’mi nazorne na predstavu, pretoze su to priemety uhlovej rychlosti do telesovych osı. Pretosa este dodatocne vymysleli Eulerove uhly, ktorych znalost’ dava lepsiu predstavu, ako je teleso v priestorenatocene.
111

3.7. TUHE TELESO
Eulerove uhly
Tuhe teleso ma vo vseobecnosti 6 zovseobecnenych suradnıc: tri sa viazu na jeho pohyb v priestore,d’alsie tri sluzia na opis jeho natocenia. Prave na opis natocenia telesa v priestore sa pouzıvaju Euleroveuhly - ϕ, θ, ψ.
Predstavme si v priestore hranol (s nerovnakou dlzkou stran), ktory je zatial’ postaveny v smere labo-ratornej osi z. Pred akymkol’vek otacanım sa jeho telesove osi zhoduju s laboratornymi osami. Prvy Eulerovuhol, ϕ, urcuje, o kol’ko pootocıme tento hranol podl’a osi z proti smeru hodinovych ruciciek. Natocenımhranola sa otacaju aj jeho telesove osi:
x
y
z → z'
x'
y'
z=
φ
Obrazok 3.35: Prvy Eulerov uhol ϕ.
Tymto natocenım sa telesove osi otocia, teraz ich mame oznacene jednou ciarkou. Os z′ je zatial’ totoznas osou z.
Eulerov uhol θ je uhol, o ktory teraz otocıme teleso podl’a osi x′ prroti smeru hodinovych ruciciek:
y'
z'
x' → x''
y''
z''
x'=
θ
Obrazok 3.36: Druhy Eulerov uhol θ.
Mozme si vsimnut’, ze ak doterajsie uhly ϕ a θ su tie iste uhly ϕ a θ zo sferickych suradnıc, teda os z′′
mieri v smere ϕ a θ vo sferickych suradniciach, spojenych s laboratornou sustavou (teda uhol ϕ sa meria odosi x a uhol θ od osi z).
112
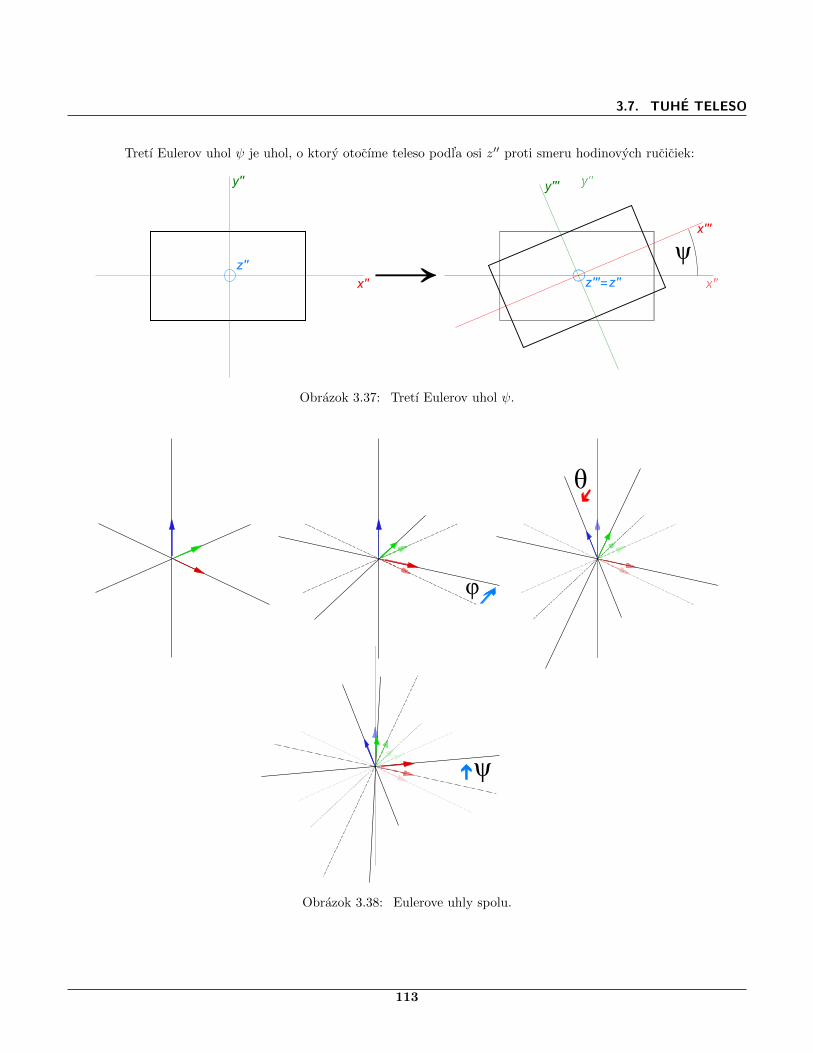
3.7. TUHE TELESO
Tretı Eulerov uhol ψ je uhol, o ktory otocıme teleso podl’a osi z′′ proti smeru hodinovych ruciciek:
x''
y''
z'' → z'''
x'''
y'''
z''=
ψ
Obrazok 3.37: Tretı Eulerov uhol ψ.
φ
θ
ψ
Obrazok 3.38: Eulerove uhly spolu.
113

3.7. TUHE TELESO
Eulerove kinematicke rovnice
Nasou ulohou je teraz vyjadrit’ vzt’ah medzi Eulerovymi uhlami (ϕ, θ, ψ) a priemetmi uhlovej rychlostido telesovych osı (ω1, ω2, ω3). Najprv nahliadneme strukturu tohto vzt’ahu. Eulerove uhly chapeme, prısnevzate, ako zovseobecnene suradnice αi. Pozrieme sa, co s nimi spravı infinitesimalna rotacia v smere, ktoryurcuje vektor ~ω (tento smer je dany jednotkovym vektorom ~n). Tato rotacia zrejme docieli, ze z povodnehoEulerovho uhlu αi urobı novy uhol, αi + dαi. Podstatou bude rozvinut’ zmenu v Eulerovom uhle do prvehoradu zmeny uhlu (a teda aj casu):
~nϕ→ ~nϕ+ ~ndϕ =⇒ αi → αi + dαi (α, ~ωdt) (3.167)
ωidt ≡ dϕi (3.168)
dαi (α, ~ωdt) = dαi
(α,~0
)︸ ︷︷ ︸
=0
+dϕj∂αi∂ϕj
∣∣∣∣d~ϕ=~0︸ ︷︷ ︸
=Aij
(3.169)
dαidt
=Aijdϕj
dt=Aijωjdt
dt= Aijωj (3.170)
αi = Aij (θ, ϕ, ψ)ωj (3.171)
Zovseobecnene suradnice αi su derivacie Eulerovych uhlov a prave sme zistili, ze vzt’ah medzi tymitoderivaciami a uhlovou rychlost’ou je linearny - matica, ktora tento vzt’ah sprostredkuva v skutocnosti zavisılen od samotnych Eulerovych uhlov, nie od ich derivacii, ani od ~ω (pretoze matica Aij vznikla dosadenım vderivaciach za ~ωdt = 0): ϕθ
ψ
=
A (θ, ϕ, ψ)
ω1
ω2
ω3
(3.172)
Ak su ale Eulerove uhly dane spravne (co su, pretoze ku kazdej trojici ϕ, θ, ψ existuje ~ω a ku kazdej ~ωexistuje ϕ, θ, ψ), potom sa tento vzt’ah da obratit’ a dostaneme:ω1
ω2
ω3
=
A−1 (θ, ϕ, ψ)
ϕθψ
(A−1
)ij≡ Bijω1
ω2
ω3
=
B (θ, ϕ, ψ)
ϕθψ
(3.173)
Na riesenie prıkladov s rotaciou telies je nutne poznat’ maticu, ktora sprostredkuva vzt’ah medzi uhlovourychlost’ou a derivaciami Eulerovych uhlov. Uhlovu rychlost’ ~ω mozeme rozlozit’ jednak do telesovych osı ~ε,jednak do inej, presne definovanej bazy. V prvom prıpade budu koeficienty pri danych smerovych vektorochpriamo zlozky ~ω, v druhom prıpade to budu Eulerove uhly ϕ, θ, ψ:
~ω = ω1~ε1 + ω2~ε2 + ω3~ε3 = ϕ~e3 + θ ~N + ψ~ε3 (3.174)
Je jasne, ze ak teleso rotuje v uhle ψ, rotuje vlastne podla tretej telesovej osi (teda ~ε3), kdezto ked’
rotuje v uhle θ, rotuje podl’a zvlasnej osi, ktora v laboratornej sustave zavisı od uhlu ϕ a v telesovej sustavepodl’a ψ. Ak rotuje v uhle ϕ, otaca sa vlastne okolo tretej laboratornej osi. Plan je teraz odvodit’ vzt’ahymedzi ~e3, ~N , ~ε3 a ~ε1, ~ε2, ~ε3.
114
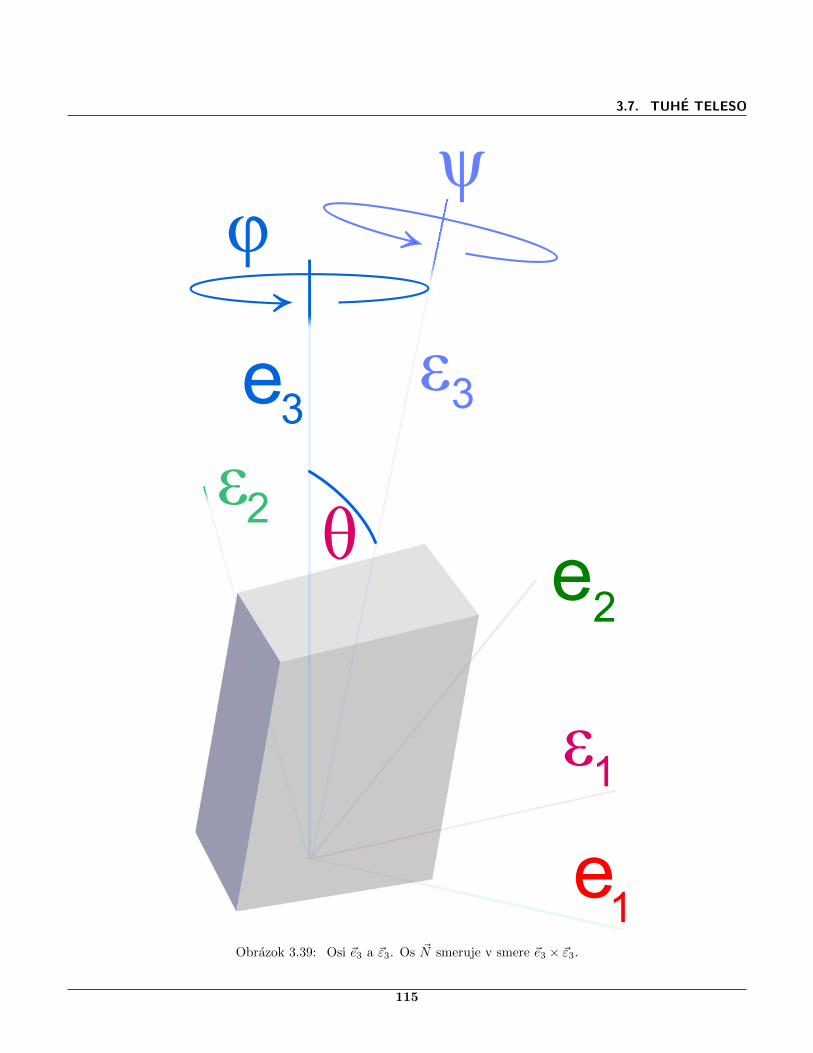
3.7. TUHE TELESO
θ
e
e
e
1
2
3
ε
ε
ε
1
2
3
φ ψ
Obrazok 3.39: Osi ~e3 a ~ε3. Os ~N smeruje v smere ~e3 × ~ε3.
115

3.7. TUHE TELESO
Najjednoduchsı vzt’ah je medzi ψ a ~ω, pretoze tento Eulerov uhol je okolo ~ε3. Pretoze θ je uhol odklonumedzi ~e3 a ~ε3, os ~N smeruje v smere ~e3 × ~ε3. Tym padom stacı poznat’ rozklad ~e3 do bazy ε a budeme mat’
vsetko, co potrebujeme:
~e3 = a~ε1 + b~ε2 + c~ε3 (3.175)
Ked’ze ε je ortonormalna baza, pre koeficienty a, b a c rozkladu ~e3 do tejto bazy platı:
a = ~e3 · ~ε1 b = ~e3 · ~ε2 c = ~e3 · ~ε3 (3.176)
Najjednoduchsie bude urcit’ koeficient c, pretoze priamo uhol θ urcuje odklon tretej telesovej osi odtretej kartezskej osi. Koeficient c zodpoveda priemetu ~e3 na vektor ~ε3, co je z definıcie cos (θ).
Vieme, ze koeficient a, ani b sa nemenı s uhlom ϕ, pretoze uhol ϕ otaca telesom okolo samotnej osi ~e3.Vezmime v rovine urcenej vektormi ~e3 a ~ε3 vektor, ktory bude kolmy na ~ε3. Definujme ho tak, ze pre uholθ z intervalu 〈0, π〉 bude zlozka vektora ~e3 v smere tohto vektora rovna sin (θ). Oznacme ho ~ε ′3. Ked’ze jekolmy na ~ε3, je mozne ho uplne rozlozit’ do bazy ~ε1, ~ε2, pretoze jeho zlozka v smere ~ε3 je nulova.
Zmenou uhla ψ sa menı poloha telesovych osı ~ε1 a ~ε2 voci laboratornej sustave, no osi ~e3 a ~ε3 pritomstoja, teda aj vektor ~ε ′3 stojı. Pred akymkol’vek otacanım v uhle ψ mieri vektor ~ε ′3 presne v opacnom smere,ako ~ε1 (az na prıpad, ked’ θ = 0, pretoze v tomto prıpade je ~ε ′3 nedefinovany). Rozklad ~ε ′3 do vektorov ~ε1 a~ε2 zacne byt’ zaujımavy, az po otacanı v uhle ψ, pretoze nezavisı na θ ani ϕ. Otocme teda teleso do polohy(0, π/2, ψ) a skumajme, aky to ma dopad na vektor ~ε ′3. Ked’ ψ = 0, tak os ~ε2 mieri v smere ~ε ′3 a zvacsovanımψ sa tento priemet zmensuje az do uhlu ψ = π/2, kedy je ~ε ′3 v smere ~ε2 nula. Naopak, ked’ ψ = 0, priemet~ε ′3 do ~ε1 je nulovy a zvacsovanım ψ sa tiez zvacsuje. Platı teda:
~ε ′3 = sin (ψ) ~ε1 + cos (ψ) ~ε2 (3.177)
Z toho pre ~e3 dostavame:
~e3 = sin (θ) ~ε ′3 + cos (θ) ~ε3 = sin (ψ) sin (θ) ~ε1 + cos (ψ) sin (θ) ~ε2 + cos (θ) ~ε3 (3.178)
Vektor ~N dostaneme ako sucin ~e3 × ~ε3:
~N ∝ ~e3 × ~ε3 = [sin (ψ) sin (θ) ~ε1 + cos (ψ) sin (θ) ~ε2]× ~ε3 = − sin (ψ) sin (θ) ~ε2 + cos (ψ) sin (θ) ~ε1 (3.179)
~e3 × ~ε3 = |~e3| |~ε3| sin (θ) ~N =⇒ ~N = cos (ψ) ~ε1 − sin (ψ) ~ε2 (3.180)
Z tohto celeho mozeme urcit’ vzt’ah medzi ~ω a Eulerovymi uhlami:
~ω = ϕ~e3 + θ ~N + ψ~ε3 =
= [sin (ψ) sin (θ) ~ε1 + cos (ψ) sin (θ) ~ε2 + cos (θ) ~ε3] ϕ+ [cos (ψ) ~ε1 − sin (ψ) ~ε2] θ + ~ε3ψ =
=[sin (ψ) sin (θ) ϕ+ cos (ψ) θ
]~ε1 +
[cos (ψ) sin (θ) ϕ− sin (ψ) θ
]~ε2 +
[cos (θ) ϕ+ ψ
]~ε3 (3.181)ω1
ω2
ω3
=
sin (ψ) sin (θ) cos (ψ) 0cos (ψ) sin (θ) − sin (ψ) 0
cos (θ) 0 1
ϕθψ
(3.182)
Prave sme odvodili Eulerove kinematicke rovnice:
ω1 = sin (θ) sin (ψ) ϕ+ cos (ψ) θ
ω2 = sin (θ) cos (ψ) ϕ− sin (ψ) θ
ω3 = cos (θ) ϕ+ ψ
(3.183)
116

3.7. TUHE TELESO
Eulerove dynamicke a kinematicke rovnice sa v jednoduchych prıpadoch, kedy momenty sıl nezavisia odEulerovych uhlov, daju riesit’ oddelene. Najskor riesime dynamicke rovnice, ktorych nezname su priemetyuhloveho zrychlenia na telesove osi, ωi. Ich riesenie dosadıme do Eulerovych kinematickych rovnıc, ktorenasledne riesime pre Eulerove uhly ϕ, θ, ψ.
Ked’ze sme odvodili obe sady rovnıc, mozeme sa vratit’ ku vol’nemu symetrickemu zotrvacnıku.
3.7.5 Dalsie prıklady*
Dynamika a kinematika vol’neho symetrickeho zotrvacnıka*
Pre taketo teleso mame J = diag (j, j, J), ked’ze dve zlozky jeho momentu zotrvacnosti v telesovej bazesa rovnaju. Oznacme J − j = k > 0. Ked’ze teleso ma byt’ vol’ne, moment sily, ktory na neho posobı jenulovy. Eulerove dynamicke rovnice su:
jω1 + kω2ω3 = 0
jω2 − kω1ω3 = 0
Jω3 = 0 =⇒ ω3 = konst.
(3.184)
Z prvej rovnice vyplyva:
kω3 = −jω1
ω2
Dosadıme to do druhej rovnice:
jω2 +jω1ω1
ω 2= 0 =⇒ ω1ω1 + ω2ω2 = 0
Aby sme si uvedomili, co sme prave napısali, spocıtame:
d
dtf2(t) =
df
dtf + f
df
dt= 2ff
Napısali sme teda:
ω1ω1 + ω2ω2 = 0 =⇒ 1
2
d
dtω2
1 +1
2
d
dtω2
2 =1
2
d
dt
(ω2
1 + ω22
)= 0
=⇒ ω21 + ω2
2 = konst. (3.185)
No ked’ze aj tretia zlozka uhlovej rychlosti je konstantna, spolu dostavame:
~ω 2 = ω21 + ω2
2 + ω23 = konst. (3.186)
Ked’ze ~M = 0, tak ~L je konstantny vektor. Uzitocne bude teda nechat’ uplne rovnake definıcie Eu-lerovych uhlov vzhl’adom na laboratorne osi, ake sme podali uz skor, nech teda tento konstantny vektormieri v smere tretej laboratornej osi. Ako sme uz predtym odvodili, priemet ~e3 do ~ε3 je cos (θ), teda priemet~L do ~ε3 bude L cos (θ). Avsak vzhl’adom na to, ze ω3 je priemet ~ω do ~ε3, tak platı:
L cos (θ) = Jω3 =⇒ cos (θ) =Jω3
L= konst. =⇒ θ = θ0 = konst. (3.187)
117

3.7. TUHE TELESO
To je asi tak vsetko, co sme mali a chceli vymlatit’ z dynamickych rovnıc, pokracujeme teda kinematic-kymi:
ω1 = sin (θ) sin (ψ) ϕ+ cos (ψ) θ
ω2 = sin (θ) cos (ψ) ϕ− sin (ψ) θ
ω3 = cos (θ) ϕ+ ψ
L’ave strany zatial’ ponechame na pokoji, do pravych dosadıme hlavne zjednodusenie θ = konst. =⇒θ = 0:
ω1 = sin (θ0) sin (ψ) ϕ
ω2 = sin (θ0) cos (ψ) ϕ
ω3 = cos (θ0) ϕ+ ψ
(3.188)
Vzhl’adom na konstantnost’ vyrazu ω21 + ω2
2 mozeme umocnit’ prve dve rovnice a scıtat’ ich - dostanemeznovu konstantu:
ω21 + ω2
2 = sin2 (θ0) ϕ2
Jedina zaujımava neznama v tejto rovnici je ϕ, pre ktoru teda platı:
ϕ =
√ω2
1 + ω22
sin (θ0)= konst. =⇒ ϕ(t) = Ωϕt+ ϕ0 (3.189)
Toto zistenie veselo dosadıme do poslednej rovnice (3.188):
ω3 = cos (θ0) Ωϕ + ψ
Z coho pre ψ vyplyva:
ψ = ω3 − cos (θ0) Ωϕ = konst. =⇒ ψ(t) = Ωψt+ ψ0 (3.190)
Ked’ze pri zotrvacnıku nam ide hlavne o vzt’ah medzi Ωϕ, Ωψ a θ0, vyuzijeme (3.189), (3.188) v spojenıs konstantnost’ou momentu hybnosti:
Ωϕ =
√ω2
1 + ω22
sin (θ0)
~L = jω1~ε1 + jω2~ε2 + Jω3~ε3 =⇒ L2 = j2(ω2
1 + ω22
)+ J2ω2
3 =⇒ ω21 + ω2
2 =1
j2L2 −
(J
j
)2
ω23
cos (θ0) =Jω3
L=⇒ sin (θ0) =
√1−
(Jω3
L
)2
=⇒ Ωϕ =1
j
√L2 − J2ω2
3
1−(Jω3
L
)2 =L
j(3.191)
Z tretej rovnice mame (3.188):
ω3 = cos (θ0) Ωϕ + Ωψ =⇒ Ωψ = ω3 − cos (θ0) Ωϕ(3.187)
=L
Jcos (θ0)− L
jcos (θ0) =
=
(1
J− 1
j
)L cos (θ0) (3.192)
118
3.7. TUHE TELESO
Vyuzitım (3.191) dostavame finalny vzt’ah precesnu rychlost’ Ωϕ v zavislosti od Ωψ a θ0:
Ωϕ =Ωψ(
j
J− 1
)cos (θ0)
(3.193)
Zopar (dolezitych) poznamok ku Eulerovym uhlom a precesii:Poznamka c. 1: v priebehu riesenia sme vyuzili, ze moment hybnosti vol’neho telesa je konstantny a
preto sme ho zvolili v smere osi z laboratornej sustavy. Uvedomıme si, ze tym sme priamo zvolili θ = konst.Ak by sme to neurobili, neskutocne by sme si st’azili riesenie kinematickych rovnıc a vo vseobecnosti by namvysli nepekne funkcie θ(t), ϕ(t) a ψ(t). Mnohokrat je treba takymto sposobom vyberat’ vhodne natocenie,bazu, ale ako sme uz predtym videli, tak aj zovseobecnene suradnice. Nemusı totiz platit’ ze to, co je peknev jednej baze, je pekne aj v inej baze.
Poznamka c. 2: Po vyriesenı dynamickych rovnıc vidno, ze pre symetricky zotrvacnık uz neplatı ~ω ‖ ~L.Miesto toho vidno, ze vektor uhlovej rychlosti ~ω sa sam otaca okolo vektora momentu hybnosti. Mnohı l’udiatento vzt’ah prezentuju ako precesiu, pricom kinematicke rovnice v podstate odignoruju a vysledok pre θ0,Ωϕ a Ωψ nepovazuju za dolezity. Pre mna osobne je precesia (aspon co sa tyka zotrvacnıkov) to, co mozempozorovat’ vol’nym okom, teda to, co je zapısane v Eulerovych uhloch.
Poznamka c. 3: V niektorych knizkach sa Eulerove uhly pomenuju vel’mi sugestıvne - uhol θ nazyvamenutacny uhol, ϕ precesny uhol a ψ rotacny uhol. Toto nazvoslovie je site na mieru precesii t’azkeho symet-rickeho zotrvacnıka, co je vlastne zotrvacnık, ktory sa tocı na stole. Zotrvacnık je teda podoprety - jedna silana neho posobı v mieste podopretia priamo nahor, druha sila posobı v t’azisku smerom nadol a ich vel’kosti surovnake. Tento zotrvacnık vykonava v uhloch ϕ a ψ podobny pohyb, no v uhle θ pozorujeme este kmitanie,ktore dostalo nazov nutacia. Vsetko je absolutne v poriadku, pretoze to, co pozorujeme sa da pekne od sebaoddelit’ - vidıme, ze zotrvacnık sa tocı okolo vlastnej osi (nazvali by sme to rotaciou), d’alej sa tento pohybstaca okolo inej osi (toto nazveme precesiou) a este odklon tychto dvoch osı kmita v case (nutacia). Vezmimesi ale znovu symetricky vol’ny zotrvacnık a skumajme, co sa deje, ked’ jeho tvar je stale sfericky symetrickejsı(napr. brali by sme elipsoidy, ktore sa tvarom blızia ku guli). Je zjavne, ze pre tieto telesa musı postupneustat’ precesia, ocakavame teda, ze precesny uhol pojde do nuly a rotacny uhol ostane v case linearne rastuci(ostane urceny v podstate pociatocnymi podmienkami, ktore mu udelıme). Na nase obrovske prekvapeniesa tak nestane. Ako vidno z (3.193), ked’ sa j blızi ku J , teda vyraz (j/J − 1) sa blızi k nule, aj Ωψ samusı blızit’ k nule, inac by vyraz na l’avej strane divergoval. Toto je zrejme t’azka rana pre vsetkych, ktorıpovazovali Eulerove uhly za nadherne opisne a jasne v kazdej situacii - nie je tomu tak. Sfericky symetrickevol’ne teleso naozaj rotuje iba v uhle ϕ, musıme sa teda zmierit’ s tym, ze nazvoslovie site na mieru precesiijednoducho nebude inde fungovat’.
Poznamka c. 4: v skutocnosti sa Eulerove uhly nepovazuju za vel’mi vhodny nastroj pri riesenı dy-namickych problemov (to su tie, kde na sustavu posobia sily a my zist’ujeme, ako sustava reaguje), zato suvel’mi nazorne pri urcovanı polohy telesa (ak mame dane Eulerove uhly, vel’mi rychlo si vieme predstavit’,ako je teleso v priestore natocene). Pouzıvaju sa rozne uhly, podl’a roznych schem natacania, ktore oznacujuporadie osı, podl’a ktorych sme teleso natacali. Eulerove uhly definovane v tomto texte su zavedene podl’aschemy z − x− z, pretoze v takom poradı sme otacali teleso podl’a osı. Je mozne pouzit’ takmer l’ubovol’nuschemu, jedine obmedzenie je, ze dve po sebe nasledujuce rotacie sa musia konat’ podl’a roznych osı. Ine,analogicke uhly ku Eulerovym su Tait-Bryanove uhly. V letectve sa pouzıvaju ine nazvy a to heading (smer,teda v princıpe uhol ϕ), elevation (zdvih, teda uhol θ meranı od vodorovnej polohy), bank (otocenie lietadla
podl’a pozdlznej osi, ψ), poprıpade yaw, pitch, roll (analogicky). V praxi vznika casto problem s tzv. gimballock, teda strata stupna vol’nosti. Ak dve osi, podl’a ktorych sme vykonali rotacie o Eulerove uhly splyvaju(napr. ak θ = 0), potom takuto rotaciu mozno reprezentovat’ ako pohybom v jednom uhle, tak aj pohybomv druhom uhle, respektıve kombinaciou tychto pohybov. My, ako ,,zadavaci” Eulerovych uhlov vzdy vieme,co sme spravili, no pri spatnom odcıtanı uhlov takto vznika ista mnohoznacnost’. V praxi sa teda vyuzıvajuna opis rotacie quaterniony, co je ale d’aleko za ramcom tohto textu.
119

3.7. TUHE TELESO
Namiesto riesenia t’azkeho symetrickeho zotrvacnıka (mozno najst’ v Landau - Lifsic) budeme riesit’ tiezvel’mi zaujımavy problem: predstavme si gul’u s polomerom r a momentom zotrvacnosti J , na ktorej povrchuje pripevneny reaktıvny motor. Vysledkom je konstantny vektor sily, ktory je permanentne prilepeny kpovrchu gule. Zaujıma nas natocenie telesa v case a poloha jeho t’aziska v case. Ked’ze gul’a je malonazorna (t’azko rozoznat’ ako je natocena), budeme pouzıvat’ kocku s hranou dlzky 2a (je to rovnako sferickysymetricky zotrvacnık, na riesenı sa teda nic nezmenı):
F→
F→
Obrazok 3.40: Gul’a resp. kocka s reaktıvnym pohonom.
Prıklad si znacne zjednodusıme predpokladom, ze pociatocny vektor momentu hybnosti je nulovy (t.j.
na zaciatku teleso stojı): ~L(t = 0) = ~0.
Tato sila ~F je samozrejme konstantna v telesovych osiach, pretoze reaktıvny motor je napevno pripev-neny ku telesu. ~F vsak nie je konstantna v inercialnej (laboratornej) sustave! je tomu tak preto, lebo
posobenım sily sa teleso v case nataca, co vsak natocı aj dany vektor ~F . Na vyriesenie pohybu t’aziskabudeme musiet’ najprv vyriesit’ rotaciu telesa. Nasledne pohyb t’aziska bude dany Newtonovou rovnicou.
Nech telesove osi mieria nasledovne: pri polohe kocky ako na obrazku nech os x mieri dol’ava, os ysmerom z obrazku a os z v smere sily ~F . Nech tato sila ma vel’kost’ F , potom jej zlozky v telesovych osiachbudu: ~F = (0, 0, F ). Kazda zlozka momentu sily sa urcuje vzhl’adom na prıslusnu telesovu os a my vidıme,ze nenulova bude jedine zlozka y. Mozeme teda pısat’ dynamicke rovnice:
0 = Jω1 =⇒ ω1 = C1
aF = Jω2 =⇒ ω2 =aF
Jt+ C2
0 = Jω3 =⇒ ω3 = C3
(3.194)
Ked’ze vsak ~L(t = 0) = 0, potom C1 = C2 = C3 = 0. Znovu si zjednodusıme situaciu, tentoraz tak, zepostavıme laboratornu os z do smeru, v ktorom je (konstantny) vektor momentu sily (teda telesova os y budezhodna s laboratornou osou z). Ako vieme, ze je konstantny? No pretoze pociatocny moment hybnosti je
nulovy a teda sila ~F sposobuje len rotaciu v jedinej rovine (rovine urcenej vektorom ~F a t’aziskom kocky). Pritakto zvolenej situacii vsak platı, ze θ = 0. Musıme si dat’ pozor, tentoraz budu platit’ Eulerove kinematickerovnice, no ω2 bude prisluchat’ tretej rovnici (pretoze sme na zaciatku urcili osi laboratornu z a telesovu yako zhodne). Napıseme rovnice:
0 = 0
aF
Jt = ϕ+ ψ
0 = 0
(3.195)
120

3.7. TUHE TELESO
Mame gimbal lock v praxi - realizacia rotacie tuheho telesa je urcena len suctom dvoch eulerovychuhlov. Dohodnime sa teda, ze ψ = 0. Ostane nam tak rovnica:
ϕ =aF
Jt =⇒ ϕ(t) =
aF
2Jt2 (3.196)
Vyslo nam to, co sme aj ocakavali - pri posobenı konstantneho momentu sily (napr. roztacam koleso, naktore je namotane lano so zavazım) sa objekt otaca tak, ze jeho uhol kvadraticky rastie v case. Samozrejmevyuzili sme pri tom vsetky pociatocne podmienky - keby napr. teleso na zaciatku rotovalo v inej osi, pohybby bol vel’mi skaredy a nekonal by sa v jedinej rovine, ako v tomto prıpade.
Tymto mame vyriesenu rotaciu telesa v case, ostava vyriesit’ pohyb t’aziska v priestore (v case). Na tovyuzijeme Newtonovu rovnicu:
~F = m~a (3.197)
Smer vektora sily vzhl’adom na laboratorne osi je jasny, ak mame k dispozıcii uhol ϕ:
~F = [0, cos(ϕ), sin(ϕ)] (3.198)
Takto mozeme zıskat’ trajektoriu telesa v rovine yz nasledovne:
x = 0 =⇒ x = nezaujımave
y =F
mcos
(aF
2Jt2)
z =F
msin
(aF
2Jt2) (3.199)
Pri takejto sile samotna rychlost’ (y a z) vedie na Fresnelove integraly, teda´
cos(u2)du a´
sin(u2)du.Zdalo by sa, ze d’alsı integral z takej skaredej funkcie uz nebude ziadna znama funkcia, no nie je tomu tak(a keby aj bolo, stale sa da problem vyriesit’ numericky). Zaujımave je, ze v case iducom k nekonecnu saobe zlozky rychlosti blızia ku rovnakej konstante. Tento fakt vyplyva z hodnoty Fresnelovych integralov vhraniciach od 0 do nekonecna:
ˆ ∞0
cos(u2)
du =
ˆ ∞0
sin(u2)
du =1
2
√π
2(3.200)
vy (t→∞) = vz (t→∞) =F
m
ˆ ∞0
cos
(aF
2Jt2)
dt =F
m
√2J
aF
ˆ ∞0
cos
(aF
2Jt2)
d
(√aF
2Jt
)=
=
√π
2
√FJ
a
1
m(3.201)
Vidıme teda, ze v tomto prıpade sa rychlost’ vo vel’kom case akoby ,,vystreduje” do konkretneho smeru(ktory zavisı od pociatocnych podmienok). Na teleso v jeho baze sıce posobı konstantna sila, no vd’akarotacii, ktoru tato sila sposobı, bude sila striedavo posobit’ vsetkymi smermi, co ma za nasledok ustalenierychlosti v jednom smere (akoby sila prestala posobit’ vo vel’kych casoch).
121
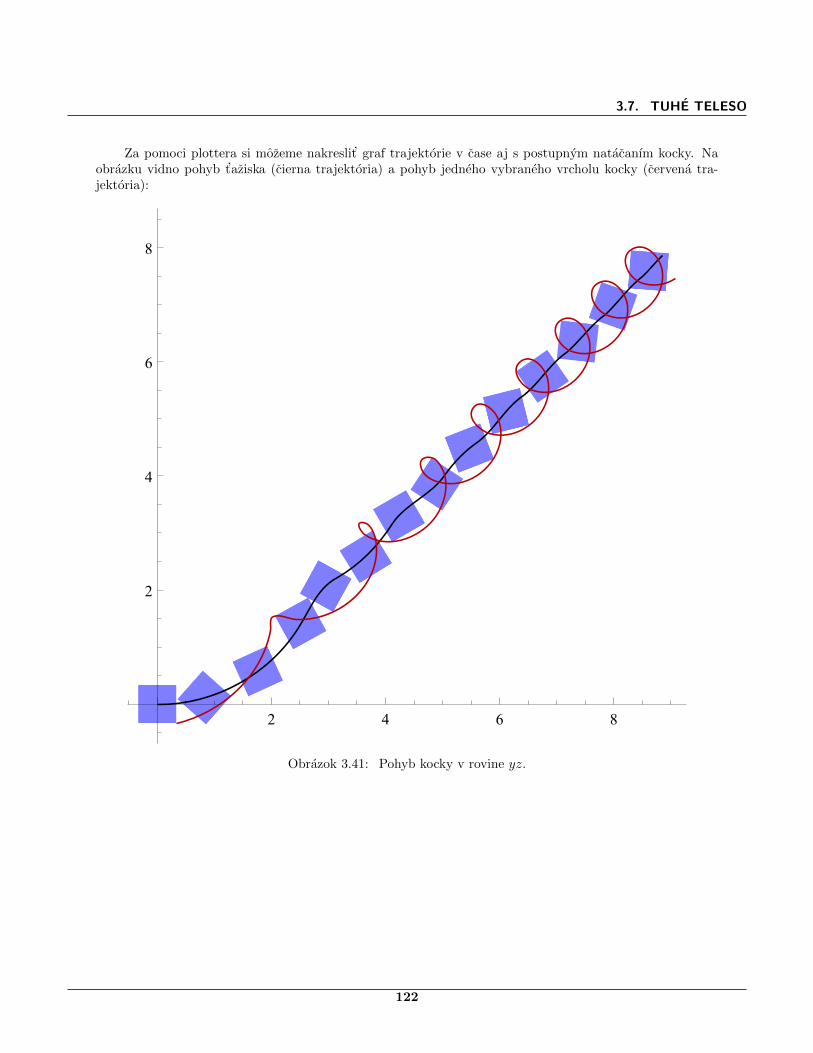
3.7. TUHE TELESO
Za pomoci plottera si mozeme nakreslit’ graf trajektorie v case aj s postupnym natacanım kocky. Naobrazku vidno pohyb t’aziska (cierna trajektoria) a pohyb jedneho vybraneho vrcholu kocky (cervena tra-jektoria):
Obrazok 3.41: Pohyb kocky v rovine yz.
122
4Uvod do mechaniky kontinua a hydrodynamiky
Kym doteraz sme skumali hmotne body, respektıve sustavy hmotnych bodov, v tejto kapitole budemevysetrovat’ pohyb hmotnych telies, ktore vyplnaju isty objem spojito. Narozdiel od tuhych telies, ktorenemenia svoj tvar pri posobenı vonkajsıch sıl, v kvapalnom a pruznom kontinuu mozu jednotlive body menit’
svoju vzajomnu vzdialenost’. Postupovat’ budeme spociatku tak vseobecne, ako sa len da. Neskor sa budemekonkretizovat’ na pohyb pruzneho kontinua a kvapaliny, spolu s riesenım jednoduchsıch uloh, ktore k tymtokategoriam patria.
Pri vytvaranı modelu spojiteho prostredia musıme v istom zmysle vychadzat’ zo skutocnosti, no v niecomsa musıme dopustit’ nutnej abstrakcie. Ako uz bolo spomenute, jednotlive body kontinua sa mozu vzajomnepohybovat’ tak, ze pritom menia vzdialenosti medzi sebou, no nekonkretizovali sme, co su to vlastne tie bodykontinua. Nemyslia sa tym ani atomy, ani molekuly, vzdy sa tym myslı kusok kontinua (s malymi rozmermi),ktory ma spojite rozlozenu hmotnost’ (je mozne ju opisovat’ spojitou funkciou hustoty). Vyvstava otazka,ako vel’mi male rozmery su tu prıpustne. Odpoved’, ktora sa ponuka je: len tak male, aby sme boli spokojnıs rozdielom medzi skutocnost’ou a tymto modelom, ktory vytvarame zanedbanım atomarnej a molekularnejstruktury a nahradenım spojitou hmotou. Opis spojitymi velicinami je vel’mi prıjemny z hl’adiska pouzıvaniaaparatu diferencialneho a integralneho poctu. V odvodeniach budeme predpokladat’, ze cas je absolutny amoze sluzit’ ako nezavisla premenna na opis akychkol’vek spomınanych dejov. To je samozrejme dostatocnepravdivy opis, ak efekty, ktore opisujeme su dostatocne nerelativisticke.
123
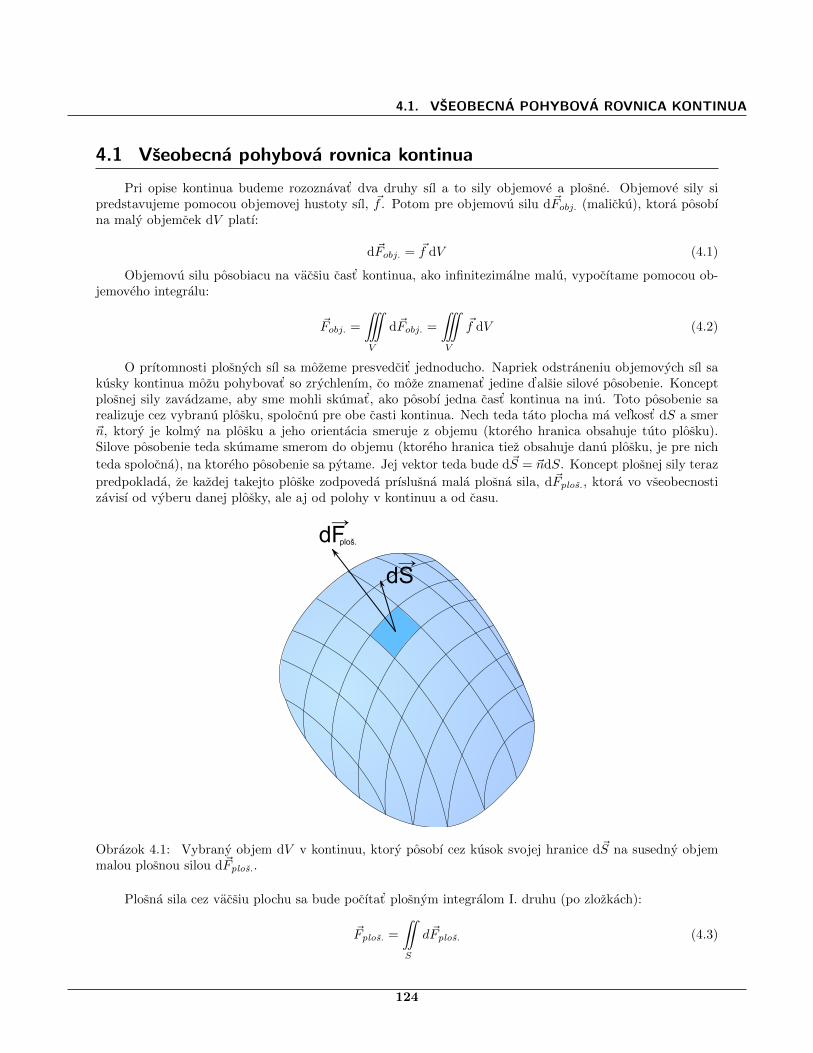
4.1. VSEOBECNA POHYBOVA ROVNICA KONTINUA
4.1 Vseobecna pohybova rovnica kontinua
Pri opise kontinua budeme rozoznavat’ dva druhy sıl a to sily objemove a plosne. Objemove sily sipredstavujeme pomocou objemovej hustoty sıl, ~f . Potom pre objemovu silu d~Fobj. (malicku), ktora posobına maly objemcek dV platı:
d~Fobj. = ~f dV (4.1)
Objemovu silu posobiacu na vacsiu cast’ kontinua, ako infinitezimalne malu, vypocıtame pomocou ob-jemoveho integralu:
~Fobj. =
˚
V
d~Fobj. =
˚
V
~f dV (4.2)
O prıtomnosti plosnych sıl sa mozeme presvedcit’ jednoducho. Napriek odstraneniu objemovych sıl sakusky kontinua mozu pohybovat’ so zrychlenım, co moze znamenat’ jedine d’alsie silove posobenie. Konceptplosnej sily zavadzame, aby sme mohli skumat’, ako posobı jedna cast’ kontinua na inu. Toto posobenie sarealizuje cez vybranu plosku, spolocnu pre obe casti kontinua. Nech teda tato plocha ma vel’kost’ dS a smer~n, ktory je kolmy na plosku a jeho orientacia smeruje z objemu (ktoreho hranica obsahuje tuto plosku).Silove posobenie teda skumame smerom do objemu (ktoreho hranica tiez obsahuje danu plosku, je pre nich
teda spolocna), na ktoreho posobenie sa pytame. Jej vektor teda bude d~S = ~ndS. Koncept plosnej sily teraz
predpoklada, ze kazdej takejto ploske zodpoveda prıslusna mala plosna sila, d~Fplos., ktora vo vseobecnostizavisı od vyberu danej plosky, ale aj od polohy v kontinuu a od casu.
dS
dF→ploš.
→
Obrazok 4.1: Vybrany objem dV v kontinuu, ktory posobı cez kusok svojej hranice d~S na susedny objemmalou plosnou silou d~Fplos..
Plosna sila cez vacsiu plochu sa bude pocıtat’ plosnym integralom I. druhu (po zlozkach):
~Fplos. =
¨
S
d~Fplos. (4.3)
124

4.1. VSEOBECNA POHYBOVA ROVNICA KONTINUA
Tento vzt’ah moze byt’ vo vseobecnosti dost’ zlozity, no vyraz plosky v argumente d~Fplos.
(~r, t, d~S
)je
co do absolutnej hodnoty maly. Fyzik, co vidı v argumente funkcie malu vec, okamzite rozvıja funkciu doTaylorovho rozvoja v tejto malej veci. Presunme sa teda do indexov a urobme tak pre i-tu zlozku d~Fplos.:
dFi
(~r, t, d~S
)= dFi
(~r, t,~0
)︸ ︷︷ ︸
= 0
+∂Fi∂Sj
∣∣∣∣d~S=~0︸ ︷︷ ︸
= σij
d~Sj +O(∣∣∣d~S ∣∣∣2)︸ ︷︷ ︸male
Prvy vyraz na pravej strane je nulovy, pretoze cez nulovu plochu kontinuum posobı nulovou silou. Druhyclen ma v sebe akusi dvojindexovu vec, ktorej presnejsı tvar nevieme, tak si ju aspon oznacıme uspornejsie,ako σij . Napokon tretı clen v sebe skryva zvysnych nekonecne vel’a clenov Taylorovho radu, ktore sme sakvoli ich malosti rozhodli zanedbat’. Ostalo nam:
dFi = σijdSj (4.4)
Vyraz σij nazyvame tenzor napatia. Je to vlastne tenzorove pole, pretoze je definovane v kazdom bode
~r a kazdom case t a nezavisı uz od d~S, pretoze toho sme sa vzdali dosadenım d~S = ~0 v derivacii.Ked’ uz mame definovane, co vsetko na koho/co kde akym sposobom posobı, vyjadrıme celkovu silu,
aka posobı na dany objem:
Fi =(~Fobj
)i+(~Fplos.
)i
=
˚
V
fi dV +
‹
∂V
σijdSj (4.5)
Vyraz ∂V urcuje hranicu daneho objemu V . Vyuzitie Gauss-Ostrogradskeho vety (1.25)1 spomenutejv kapitole 1 (matematicky uvod) vedie na:
Fi =
˚
V
fi dV +
˚
V
∂jσijdV =
˚
V
(fi + ∂jσij) dV (4.6)
Vyberme teraz infinitezimalny objem dV , cez ktory budeme integrovat’:
˚
dV
(fi + ∂jσij) dV = (fi + ∂jσij) dV (4.7)
kde dV je prave miera oblasti dV . Toto tvrdenie si mozeme zdovodnit’ rozne. Naprıklad tak, ze vo vel’mimalej oblasti (co do rozmerov v kazdom smere) sa kazda slusna funkcia chova tak, ze sa menı len malicko.Pri integrovanı cez takuto malu oblast’ si mozeme dovolit’ nahradit’ integral prenasobenım podintegralnejfunkcie mierou tejto oblasti, co je samotne dV . Ak dV posleme do nuly, tento vzt’ah platı stale presnejsie ado prveho radu dV sa vyrazy oproti skutocnemu vypoctu nelısia.
Vieme teraz, ze vyraz dV v sebe akosi skryva hustotu a hmotnost’. Aby sme do toho nahliadli blizsie,skumajme derivaciu hybnosti kusku objemu:
dpi =d
dt
(dmvi
)= dmvi (4.8)
1Gaussova-Ostrogradskeho veta ma samozrejme aj (otravne) predpoklady, spomenute uz v matematickom uvode. Ich splneniepredpokladane automaticky; diskutovany objem V musı byt’ jednoducho suvisla mnozina, jeho hranica musı byt’ po castiachhladka a ~F musı byt’ spojite diferencovatel’ne vektorove pole na okolı V .
125

4.1. VSEOBECNA POHYBOVA ROVNICA KONTINUA
Preco sme aplikovali derivaciu len na rychlost’? Pretoze vo vseobecnosti sa menı hustota, menı sa ajobjemcek dV , no su v takom vzt’ahu, ze ρdV sa nemenı, no ρdV = dm. Zaroven platı, ze casova derivaciahybnosti pi je sila Fi, co je obsahom prvej vety impulzovej. Finalne teda pıseme:
Fi = dmvi = ρdV vi = (fi + ∂jσij) dV (4.9)
Ak si teraz uvedomıme, ze casova derivacia rychlosti je vlastne zrychlenie a vykratime dV z obochstran, dostaneme konecne vseobecnu pohybovu rovnicu kontinua:
ρai = ∂jσij + fi (4.10)
O tenzore σij si odvodıme jednu dolezitu vlastnost’. Pocıtajme moment sily (vzhl’adom na pociatok
suradnicovej sustavy), ktory posobı na nejaky vybrany objem kontinua V . Moment sily sa pocıta ako ~r× ~F ,pre dany kusok bude tento moment dany:
Mi =
˚V
~r × ~f dV
i
+
‹∂V
~r × d~Fplos.
i
=
˚
V
εijkxjfkdV +
‹
∂V
εijkxjσkldSl =
=
˚
V
εijkxjfkdV +
˚
V
∂l (εijkxjσkl) dV =
˚
V
εijk (xjfk + σkj + xj∂lσkl) dV =
=
˚
V
εijk [xj (fk + ∂lσkl) + σkj ] dV (4.11)
Toto bol priamy vypocet Mi. Zaroven vieme, ze ~M = ~L, kde ~L = ~r × ~p. Pre Mi teda zaroven platı:
Mi =d
dt
(˚~r × d~p
)i
=d
dt
˚
V
εijkxjvkdm = εijk
˚
V
ρ (xjvk + xj vk) dV
Tu sme zase pouzili, ze ddt (dm) = 0. Pokracujeme:
Mi =
˚
V
ρ εijkxjvk︸ ︷︷ ︸=(~v×~v)i=0
+ εijkxj vk︸ ︷︷ ︸=(~r×~a)i
dV = εijk
ˆ
V
ρxjakdV (4.12)
Teraz spojıme vysledky (4.11) a (4.12):
Mi = Mi˚
V
εijk [xj (fk + ∂lσkl) + σkj ] dV =
˚
V
εijkρxjakdV
˚
V
εijk [xj (fk + ∂lσkl) + σkj − ρxjak] dV = 0
Nulovost’ integralu pre kazdy objem V je mozne splnit’ len vtedy, ak je podintegralna funkcia nulova:
εijkxj (fk + ∂lσkl)︸ ︷︷ ︸ρak
+εijkσkj − εijkρxjak = 0
εijkxjρak + εijkσkj = εijkρxjak
εijkσkj = 0 =⇒ σkj = σjk (4.13)
Dostali sme uzitocny vysledok - tenzor σij je symetricky.
126

4.2. KVAPALINY
4.2 Kvapaliny
4.2.1 Tok idealnej kvapaliny, Eulerova rovnica
Na odvodenie nejakych rovnıc potrebujeme vyriesit’ vsetky cleny nachadzajuce sa vo vseobecnej rovnicikontinua:
ρai = ∂jσij + fi (4.14)
Clen ai zavisı od opisu samotneho kontinua. Na opis kvapalın je vyhodne pouzıvat’ Eulerove rychlostnepole. Nebudeme tak sledovat’ zivot kazdej castice individualne, skor budeme v kazdom mieste priestorusledovat’, ako cez neho kvapalina preteka. Tento formalizmus vsak nebrani ani sledovaniu jednej castice pojej drahe. Clen ~a v dosledku toho dostane netrivialny tvar. Skumajme teda zmenu rychlosti v case. Na topotrebujeme rychlost’ v case t a mieste ~r: vi (~r, t).
Ak sa presunieme v case o dt dopredu, dostaneme:
t→ t+ dt · · · ~r → ~r + ~v (~r, t) dt, vi (~r, t)→ vi (~r + ~v (~r, t) dt, t+ dt) (4.15)
Zmenu rychlosti dostaneme ich odcıtanım:
dvi (~r, t) = vi (~r + dt~v (~r, t) , t+ dt)− vi (~r, t) (4.16)
Zmena v case je mala, teda prvy clen na l’avej strane si mozeme dovolit’ rozvinut’ do prveho radu Tayloraso zanedbanım ostatnych clenov:
vi (~r + dt~v (~r, t) , t+ dt) = vi (~r, t) +∂vi∂t
∣∣∣∣(~r,t)
dt+∂vi∂xj
∣∣∣∣(~r,t)
dt vj (4.17)
Pre dvi tak dostaneme:
dvi =∂vi∂t
dt+ vj∂vi∂xj
dt (4.18)
Clen ai bude dany podielom dvi a dt:
ai =dvidt
=∂vi∂t
+ vj∂vi∂xj
(4.19)
Prvy clen je standardna casova derivacia vektoroveho pol’a, druhy clen pribudol prave v dosledkuEulerovskeho opisu. Tento sa zvykne pısat’ v tvare:
vj∂vi∂xj
=[(~v · ~∇
)~v]i
=⇒ ~a =∂~v
∂t+(~v · ~∇
)~v (4.20)
Aby sme boli naozaj na cistom, co to je za vyraz, jediny krat to rozpıseme (lebo je to naozaj vel’kyvyraz):
(~v · ~∇
)(~v ) =
vx∂vx∂x
+ vy∂vx∂y
+ vz∂vx∂z
vx∂vy∂x
+ vy∂vy∂y
+ vz∂vy∂z
vx∂vz∂x
+ vy∂vz∂y
+ vz∂vz∂z
(4.21)
127

4.2. KVAPALINY
Druhy problem, ktory treba vyriesit’, je tenzor σij . Pripomenieme, ze tento tenzor vystupuje v definıcii
plosnej sily suvisiacej s malou ploskou v kontinuu, d~S:
dFi = σijdSj (4.22)
Pre idealnu kvapalinu je zlozka sily, ktora je rovnobezna s ploskou nulova. Je to tak, pretoze v idealnejkvapaline sa jednotlive vrstvy o seba nesuchaju, necıtia sa navzajom, no iba na seba tlacia. Tato zlozkasily je vsak kolma na vektor plochy, teda pre idealnu kvapalinu ostava len zlozka sily, ktora je rovnobezna svektorom plosky. Tato zlozka sa aj celkom rozumne ponuka, ak si premyslıme, ako je definovany tlak. Tlakje definovany, ako sila posobiaca kolmo na danu plochu. Lepsı zapis by bol prave:
dF⊥ = pdS (4.23)
Teda tlak je ta velicina, ktora dava umernost’ medzi vel’kost’ou plochy a vel’kost’ou sily, akou jednotlivekusky cez tuto plochu na seba posobia. Zaved’me dS+ ako stranu prisluchajucu kusku kontinua do ktoreho
mieri d~S a dS− ako plochu z opacnej strany2. Z hl’adiska tejto konvencie bude vektorova forma vzt’ahu(4.23):
d~F = −pd~S (4.24)
V indexoch zıskavame vzt’ah pre σij :
dFi = −pdSi = −pδijdSj (4.25)
Vidıme, ze tenzor σij bude:
σij = −p δij (4.26)
Prave sme odvodili tenzor napatia pre idealnu kvapalinu.Ako zaujımava objemova sila moze byt’ vselico, no tentoraz do rovnice zahrnieme gravitacnu silu zod-
povedajucu homogennemu gravitacnemu pol’u. Ma platit’:
˚
V
~fdV!= ~Fg = m~g =
˚
V
ρ~g dV =⇒˚
V
(~f − ρ~g
)dV = 0 (4.27)
Znovu platı, ze nulovost’ integralu pre kazdy objem implikuje nulovost’ podintegralnej funkcie:
~f − ρ~g = 0 =⇒ ~f = ρ~g (4.28)
Nasli sme teda vsetky cleny vo vseobecnej rovnici kontinua pre idealnu kvapalinu:
~a =∂~v
∂t+(~v · ~∇
)~v
σij = −p δij~f = ρ~g
(4.29)
Po dosadenı do vseobecnej rovnice kontinua (4.10) dostavame Eulerovu rovnicu:
∂~v
∂t+(~v · ~∇
)~v = −1
ρ~∇p+ ~g (4.30)
2Tato zvlastna konvencia je motivovana orientaciou uzavretej plochy pri pocıtanı integralov. V matematike je zvykom znacit’
ako prirodzenu (kladnu) orientaciu vektora d~S taku, aby d~S smeroval von z objemu uzavreteho danou plochou.
128

4.2. KVAPALINY
4.2.2 Rovnica kontinuity
Samotna Eulerova rovnica ma jeden problem, su to vlastne zabalene len tri rovnice. Ale pri spravnomratanı je pocet premennych az 5. Tri za rychlostne pole, jedna za tlak a jedna za hustotu. Ku kazdejpohybovej rovnici kontinua patrı aj rovnica kontinuity. Ta je mikroskopickym analogom zakona zachovaniahmotnosti3. Ten vravı, ze hmotnost’ kvapaliny daneho objemu V sa sıce moze menit’, ale len tak, ze nejakacast’ kvapaliny don pritecie, alebo z neho odtecie. Zapısane matematicky:
d
dt
˚
V
ρdV = −‹
∂V
ρ~v · d~S (4.31)
L’ava strana hovorı o tom, kol’ko hmotnosti pribudlo (ubudlo) v danom objeme V . Prava strana vy-jadruje, kol’ko jej pritieklo (odtieklo) hranicou objemu. Ked’ze plosny integral II. druhu predpoklada, ze difer-encial plochy mieri smerom von z objemu, znamienko mınus pred integralom tento smer obracia dovnutraobjemu. Ak je l’ava strana kladna, to znamena narast hmoty v objeme, musı byt’ aj prava strana kladna,teda musı platit’, ze hranicou nieco priteka dnu.
Na l’avu stranu pouzijeme vetu o derivovanı parametrickeho integralu a na pravu Gaussovu-Ostrogradskehovetu podl’a (1.25):
˚
V
∂ρ
∂tdV = −
˚
V
~∇ · (ρ~v ) dV
˚
V
(∂ρ
∂t+ ~∇ · (ρ~v )
)dV = 0
Ak ma tato rovnost’ platit’ pre kazdy objem V , potom podintegralna funkcia ma byt’ nulova. Tymdostavame rovnicu kontinuity :
∂ρ
∂t+ ~∇ · (ρ~v ) (4.32)
Zistili sme teda, ze rychlost’ a hustota sa nemozu menit’ uplne l’ubovol’ne, ale tak, aby splnali rovnicukontinuity.
4.2.3 Tok idealnej nestlacitel’nej kvapaliny
Napriek tomu, ze sme odvodili d’alsiu rovnicu, pocet neznamych funkciı stale prevysuje pocet rovnıc.Miesto odvadzania d’alsıch rovnıc skusime jednu funkciu zredukovat’ na konstantu4. Bude nou hustota,pozadujeme, aby platilo:
ρ = konst. (4.33)
Za tohto predpokladu hovorı rovnica kontinuity:
~∇ · ~v = 0 (4.34)
3Zakon zachovania hmotnosti v kontinuu platı len ak latka s nicım chemicky nereaguje.4Koho by privel’mi trapilo, ze umelo redukujeme pocet neznamych funkciı, da sa to aj bez toho. Pre plyny je nestlacitel’nost’
zly predpoklad no mame nieco ako stavovu rovnicu. Tym nam do sustavy prisla d’alsia rovnica, bohuzial’ spolu s nou prislanova neznama - teplota. Ale pre teplotu este platı rovnica vedenia tepla. Lenze toto je prıserne zlozita sustava diferencialnychrovnıc, ktora sa horko-t’azko da riesit’ numericky.
129

4.2. KVAPALINY
Spolu dostavame 4 rovnice pre tok idealnej nestlacitel’nej kvapaliny :
∂~v
∂t+(~v · ~∇
)~v = −1
ρ~∇p+ ~g
~∇ · ~v = 0
(4.35)
pre 4 nezname - tri zlozky rychlosti v1, v2, v3 a tlak p.
4.2.4 Hydrostatika
V hydrostatike predpokladame, ze rychlostne pole je staticke - cela kvapalina ma byt’ v pokoji:
~v = ~0 (4.36)
Dostavame rovnicu opisujucu staticke rozlozenie tlaku p (~r ) pre nejaku zaujımavu objemovu silu:
~∇p = ~f (4.37)
Prıklad: akvarium tvaru kvadra v homogennom gravitacnom poli. Take pole je zadane objemovousilou:
~f = ρ (0, 0,−g) (4.38)
Z (4.37) dostaneme 3 rovnice:
∂p
∂x= 0
∂p
∂y= 0
∂p
∂z= −g ρ
(4.39)
Prve dve hovoria, ze tlak p je konstanta vzhl’adom na premenne x a y, tretia hovorı:
p (x, y, z) = p0 − ρ g z (4.40)
130

4.2. KVAPALINY
4.2.5 Stacionarne tecenie nevıroveho pol’a, Bernoulliho rovnica
Stacionarne tecenie je take tecenie, ktore sa v case nemenı, teda platı:
d~v
dt= ~0 (4.41)
Definujme teraz vektorove pole vıru 5:
~ω = ~∇× ~v (4.42)
Motivaciu k tejto vol’be uvedieme nizsie. Nevırove pole bude pole s nulovou vırivost’ou:
~ω = ~∇× ~v = ~0 (4.43)
Ake dosledky budu mat’ (4.41) a (4.43) pre Eulerovu rovnicu? Prvy je zjavny - na l’avej strane zmizne
clend~v
dt. Dosledok (4.43) je trochu skryty. Zdanlivo bez suvisu spocıtajme:
(~v × ~ω)i =[~v ×
(~∇× ~v
)]i
= εijkvj
(~∇× ~v
)k
= εijkvjεklm∂lvm = εijkεlmkvj∂lvm =
DC= (δilδjm − δimδjl) vj∂lvm = vj∂ivj − vj∂jvi =
1
2∂i (vjvj)−
(~v · ~∇
)vi =
=
[~∇(~v 2
2
)]i
−[(~v · ~∇
)~v]i
=⇒ ~v × ω = ~∇(~v 2
2
)−(~v · ~∇
)~v (4.44)
Druhy clen na pravej strane sa zhodou okolnostı nachadza v Eulerovej rovnici, vyjadrime ho:(~v · ~∇
)~v = ~∇
(~v 2
2
)− ~v × ω︸︷︷︸
=~0
= ~∇(~v 2
2
)(~v · ~∇
)~v = ~∇
(~v 2
2
)(4.45)
Prepısme Eulerovu rovnicu za predpokladu stacionarnosti (4.41) a nevırovosti (4.43):
~∇(~v 2
2
)= −1
ρ~∇p+ ~g
Rovnicu mozeme prenasobit’ konstantou ρ, ktoru mozeme zahrnut’ do gradientu:
~∇(
1
2ρ~v 2
)= −~∇p+ ρ~g
Ak by sme este vedeli vyjadrit’ clen ~g ako gradient nejakej funkcie, cela rovnica by presla na tvar~∇ (nieco) = 0. Tento clen tak naozaj mozeme napısat’, pretoze platı:
~∇ (~g · ~r ) = ~g (4.46)
Pıseme teda:
~∇(
1
2ρ~v 2
)= −~∇p+ ρ~∇ (~g · ~r )
~∇(
1
2ρ~v 2 + p− ρ~g · ~r
)= ~0
5Vorticity
131
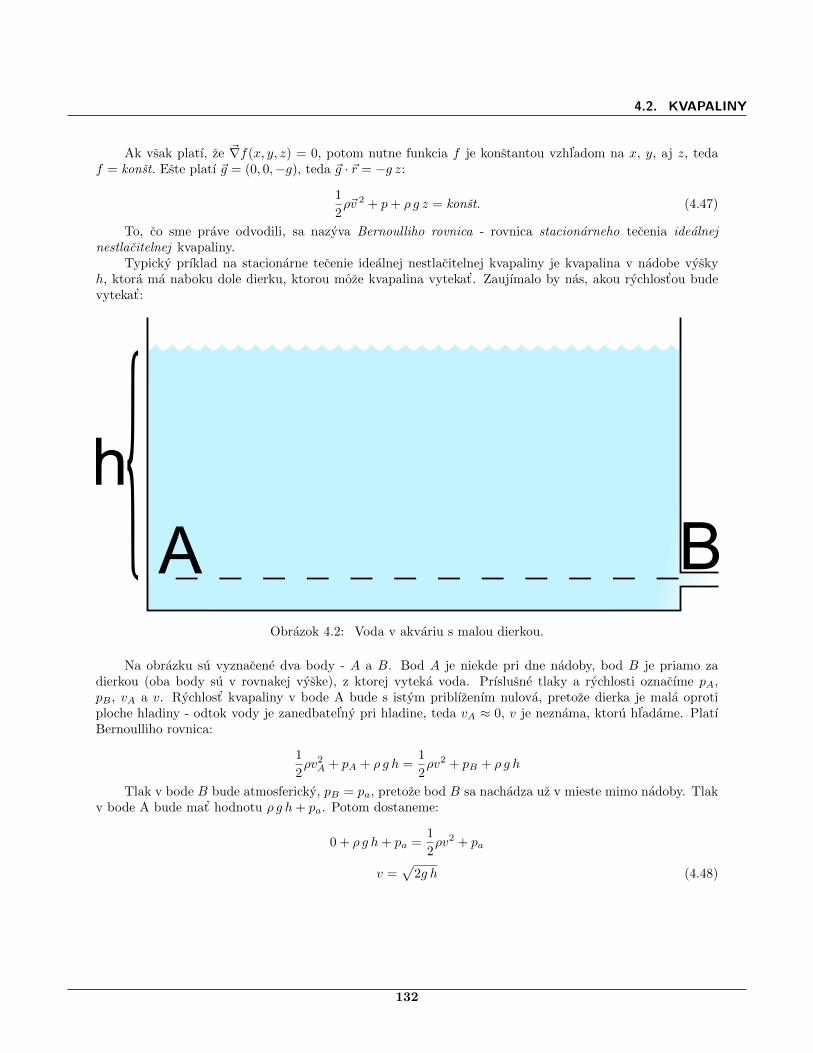
4.2. KVAPALINY
Ak vsak platı, ze ~∇f(x, y, z) = 0, potom nutne funkcia f je konstantou vzhl’adom na x, y, aj z, tedaf = konst. Este platı ~g = (0, 0,−g), teda ~g · ~r = −g z:
1
2ρ~v 2 + p+ ρ g z = konst. (4.47)
To, co sme prave odvodili, sa nazyva Bernoulliho rovnica - rovnica stacionarneho tecenia idealnejnestlacitelnej kvapaliny.
Typicky prıklad na stacionarne tecenie idealnej nestlacitelnej kvapaliny je kvapalina v nadobe vyskyh, ktora ma naboku dole dierku, ktorou moze kvapalina vytekat’. Zaujımalo by nas, akou rychlost’ou budevytekat’:
A Bh
Obrazok 4.2: Voda v akvariu s malou dierkou.
Na obrazku su vyznacene dva body - A a B. Bod A je niekde pri dne nadoby, bod B je priamo zadierkou (oba body su v rovnakej vyske), z ktorej vyteka voda. Prıslusne tlaky a rychlosti oznacıme pA,pB , vA a v. Rychlost’ kvapaliny v bode A bude s istym priblızenım nulova, pretoze dierka je mala oprotiploche hladiny - odtok vody je zanedbatel’ny pri hladine, teda vA ≈ 0, v je neznama, ktoru hl’adame. PlatıBernoulliho rovnica:
1
2ρv2A + pA + ρ g h =
1
2ρv2 + pB + ρ g h
Tlak v bode B bude atmosfericky, pB = pa, pretoze bod B sa nachadza uz v mieste mimo nadoby. Tlakv bode A bude mat’ hodnotu ρ g h+ pa. Potom dostaneme:
0 + ρ g h+ pa =1
2ρv2 + pa
v =√
2g h (4.48)
132
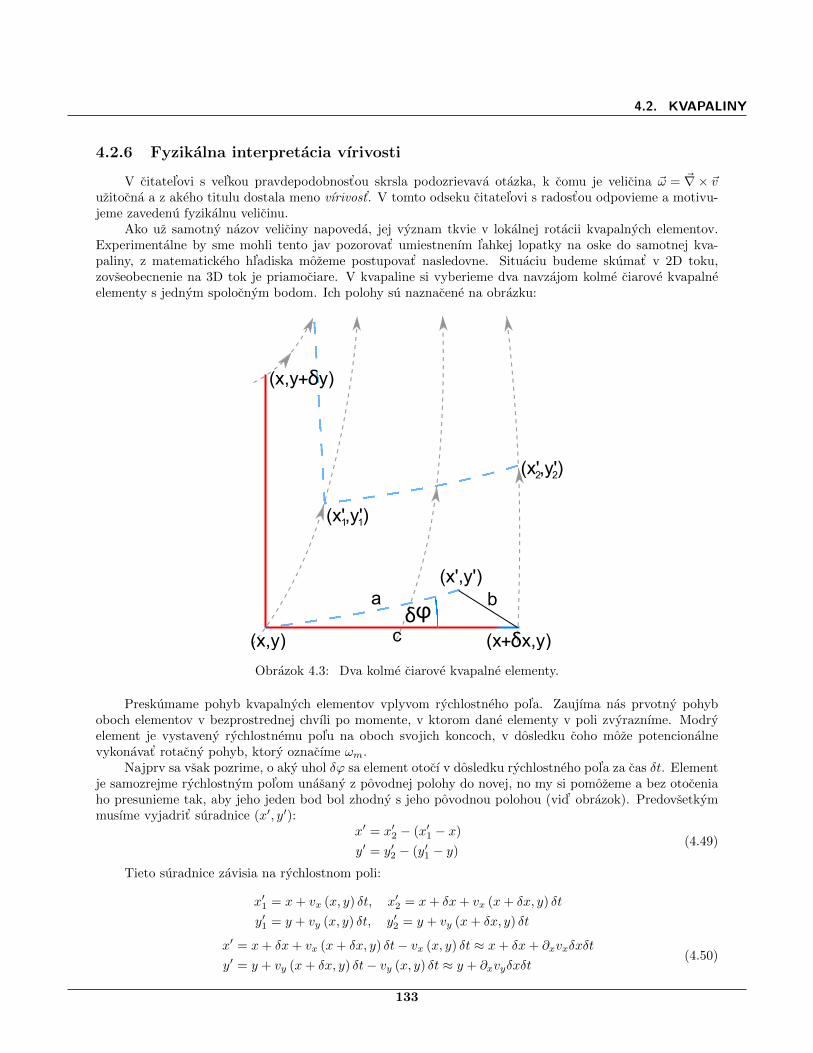
4.2. KVAPALINY
4.2.6 Fyzikalna interpretacia vırivosti
V citatel’ovi s vel’kou pravdepodobnost’ou skrsla podozrievava otazka, k comu je velicina ~ω = ~∇× ~vuzitocna a z akeho titulu dostala meno vırivost’. V tomto odseku citatel’ovi s radost’ou odpovieme a motivu-jeme zavedenu fyzikalnu velicinu.
Ako uz samotny nazov veliciny napoveda, jej vyznam tkvie v lokalnej rotacii kvapalnych elementov.Experimentalne by sme mohli tento jav pozorovat’ umiestnenım l’ahkej lopatky na oske do samotnej kva-paliny, z matematickeho hl’adiska mozeme postupovat’ nasledovne. Situaciu budeme skumat’ v 2D toku,zovseobecnenie na 3D tok je priamociare. V kvapaline si vyberieme dva navzajom kolme ciarove kvapalneelementy s jednym spolocnym bodom. Ich polohy su naznacene na obrazku:
(x,y) (x x,y)δ+
(x,y y)δ+
δϕ
(x',y')
(x',y')
1
2
1
2
(x',y')a b
c
Obrazok 4.3: Dva kolme ciarove kvapalne elementy.
Preskumame pohyb kvapalnych elementov vplyvom rychlostneho pol’a. Zaujıma nas prvotny pohyboboch elementov v bezprostrednej chvıli po momente, v ktorom dane elementy v poli zvyraznıme. Modryelement je vystaveny rychlostnemu pol’u na oboch svojich koncoch, v dosledku coho moze potencionalnevykonavat’ rotacny pohyb, ktory oznacıme ωm.
Najprv sa vsak pozrime, o aky uhol δϕ sa element otocı v dosledku rychlostneho pol’a za cas δt. Elementje samozrejme rychlostnym pol’om unasany z povodnej polohy do novej, no my si pomozeme a bez otoceniaho presunieme tak, aby jeho jeden bod bol zhodny s jeho povodnou polohou (vid’ obrazok). Predovsetkymmusıme vyjadrit’ suradnice (x′, y′):
x′ = x′2 − (x′1 − x)
y′ = y′2 − (y′1 − y)(4.49)
Tieto suradnice zavisia na rychlostnom poli:
x′1 = x+ vx (x, y) δt, x′2 = x+ δx+ vx (x+ δx, y) δt
y′1 = y + vy (x, y) δt, y′2 = y + vy (x+ δx, y) δt
x′ = x+ δx+ vx (x+ δx, y) δt− vx (x, y) δt ≈ x+ δx+ ∂xvxδxδt
y′ = y + vy (x+ δx, y) δt− vy (x, y) δt ≈ y + ∂xvyδxδt(4.50)
133

4.2. KVAPALINY
Nasim ciel’om je vyjadrenie δϕ, na co budeme potrebovat’ kosınusovu vetu. K tomu potrebujeme vyjadrit’
dlzky a, b a c. Je zjavne, ze c = δx. Dalsie dve vyjadrıme:
a =
√(x′ − x)
2+ (y′ − y)
2=
√(1 + ∂xvxδt)
2+ (∂xvyδt)
2δx
b =
√(x′ − (x+ δx))
2+ (y′ − y)
2=
√(∂xvxδt)
2+ (∂xvyδt)
2δx
c = δx
(4.51)
Platı kosınusova veta:
b2 = a2 + c2 − 2ac cos (δϕ) (4.52)
(∂xvxδt)2
+ (∂xvyδt)2
= (1 + ∂xvxδt)2
+ (∂xvyδt)2
+ 1− 2
√(1 + ∂xvxδt)
2+ (∂xvyδt)
2cos (δϕ)
0 = 2 + 2∂xvxδt− 2
√(1 + ∂xvxδt)
2+ (∂xvyδt)
2cos (δϕ)
cos (δϕ) =1 + ∂xvxδt√
(1 + ∂xvxδt)2
+ (∂xvyδt)2
=1√
1 +(
∂xvyδt1+∂xvxδt
)2
1− 1
2δϕ2 = 1− 1
2
(∂xvyδt
1 + ∂xvxδt
)2
δϕ = ∂xvyδt+O(δt2)
Vo vyraze identifikujeme uhlovu rychlost’ modreho kvapalneho elementu:
δϕ = ωmδt+O(δt2)· · · ωm =
∂vy∂x
(4.53)
Obdobnou analyzou by nam vyslo, ze uhlova rychlost’ (v tom istom smere!)6 je dana vyrazom:
ωc = −∂vx∂y
(4.54)
Scıtanım tychto dvoch velicın dostaneme dvojnasobok priemernej uhlovej rychlosti kvapalnych elemen-tov v danom geometrickom bode rychlostneho pol’a:
ωz = ωm + ωc = 2ωm + ωc
2= 2ω =
∂vy∂x− ∂vx
∂y= ε3ij∂ivj · · · ~ω = ~ekεkij∂ivk = ~∇× ~v (4.55)
6Kladna uhlova rychlost’ znacı otacania proti smeru hodinovych ruciciek.
134

4.2. KVAPALINY
Prıklad na Eulerovu rovnicu; Newtonovo vedro. Je to valcova nadoba naplnena vodou, ktora sa tocıokolo osi symetrie konstantnou uhlovou rychlost’ou Ω. Nasou ulohou je zistit’ co najviac o tvare vody, ak jesituacia ustalena, t.j. vedro sa takto tocı uz dlho a voda sa tocı spolu s nım a nemenı tvar. Potom je moznetento problem riesit’ Eulerovou rovnicou.
Ω
Obrazok 4.4: Newtonovo vedro.
Vieme, ze rychlost’ v tomto prıpade bude zavisiet’ od ~r nasledovne:
~v (~r ) = ~Ω× ~r (4.56)
kde ~Ω = (0, 0,Ω). Zlozky rychlosti teda budu:
~v (~r ) =
−Ω yΩx0
(4.57)
Ked’ze rychlostne pole je uz zname, rovnicu budeme riesit’ pre tlak p (~r ). Vieme, ze hladina vody bude
urcena miestami, kde p = pa, teda tlak bude rovny atmosferickemu. Clen(~v · ~∇
)~v bude:
~v · ~∇ = −Ω y∂
∂x+ Ωx
∂
∂y=⇒
(~v · ~∇
)~v =
−Ω2x−Ω2y
0
(4.58)
Mozeme pısat’ Eulerovu rovnicu po zlozkach:
−ρΩ2x = −∂p∂x
−ρΩ2y = −∂p∂y
0 = −∂p∂z− ρ g =⇒ p (x, y, z) = −ρ g z + Cz (x, y)
(4.59)
135

4.2. KVAPALINY
Uz vieme zavislost’ p na suradnici z, tuto dosadıme do prvej rovnice:
∂p
∂x=∂Cz∂x
= ρΩ2x =⇒ Cz (x, y) =1
2ρΩ2x2 + Cxz (y) (4.60)
Teda mame:
p (x, y, z) = −ρ g z + Cz (x, y) = −ρ g z +1
2ρΩ2x2 + Cxz (y) (4.61)
Dosadıme to do druhej rovnice:
∂p
∂y=∂Cxz∂y
= ρΩ2y =⇒ Cxz (y) =1
2ρΩ2y2 + konst. (4.62)
p (x, y, z) = −ρ g z + Cz (x, y) = −ρ g z +1
2ρΩ2x2 + Cxz (y) = −ρ g z +
1
2ρΩ2x2 +
1
2ρΩ2y2 + konst. (4.63)
Vidıme, ze konstanta bude p (0, 0, 0) = p0:
p (x, y, z) = −ρ g z +1
2ρΩ2
(x2 + y2
)+ p0 (4.64)
Mozeme pozadovat’, aby p0 = pa. Potom riesme rovnicu:
pa = p (x, y, z) =⇒ pa = −ρ g z +1
2ρΩ2
(x2 + y2
)+ pa =⇒ z =
Ω2
2g
(x2 + y2
)(4.65)
Vysiel nam rotacny paraboloid. V skutocnosti vol’ba p0 nebola nijako dolezita - pre rotacny paraboloidby iba znamenala posunutie jeho zaciatku o nejaku konstantu nahor, alebo nadol, tvar paraboloidu by satak nezmenil, len by sa zmenila jeho poloha voci pociatku suradnej sustavy.
r
z
z = _2g r2
2Ω
r = x y+2 2
r
Obrazok 4.5: Tvar vodnej hladiny v roztocenom Newtonovom vedre.
136
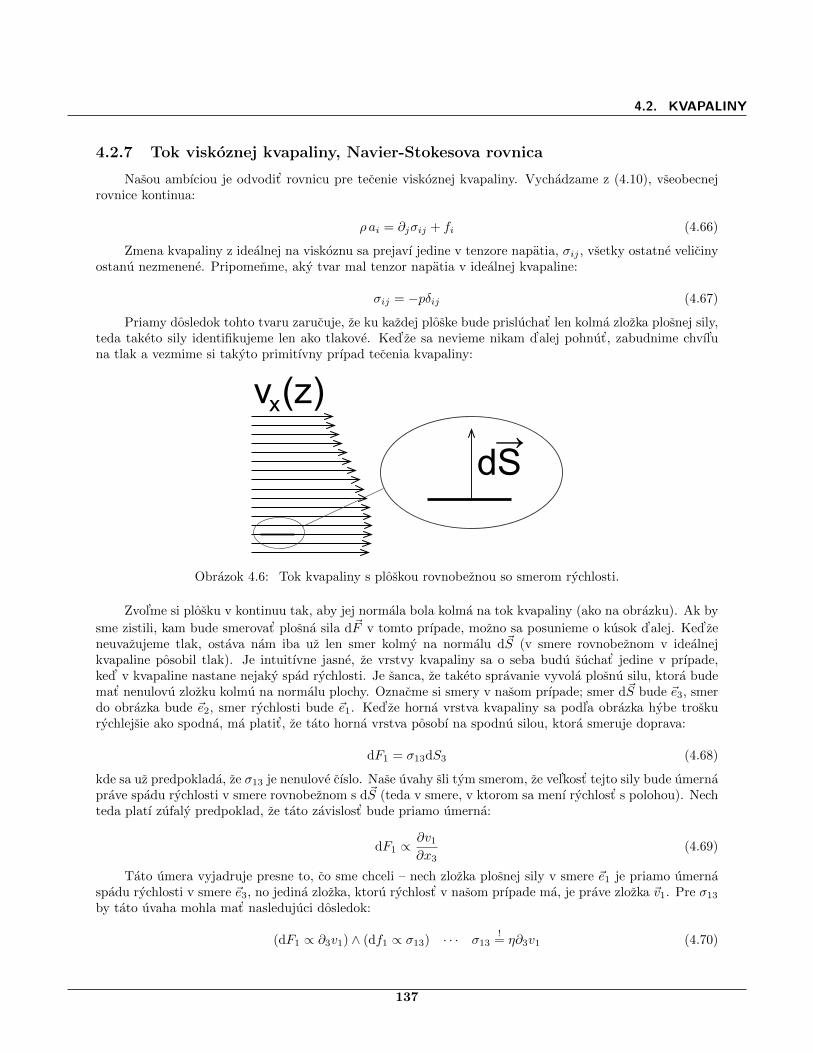
4.2. KVAPALINY
4.2.7 Tok viskoznej kvapaliny, Navier-Stokesova rovnica
Nasou ambıciou je odvodit’ rovnicu pre tecenie viskoznej kvapaliny. Vychadzame z (4.10), vseobecnejrovnice kontinua:
ρ ai = ∂jσij + fi (4.66)
Zmena kvapaliny z idealnej na viskoznu sa prejavı jedine v tenzore napatia, σij , vsetky ostatne velicinyostanu nezmenene. Pripomenme, aky tvar mal tenzor napatia v idealnej kvapaline:
σij = −pδij (4.67)
Priamy dosledok tohto tvaru zarucuje, ze ku kazdej ploske bude prisluchat’ len kolma zlozka plosnej sily,teda taketo sily identifikujeme len ako tlakove. Ked’ze sa nevieme nikam d’alej pohnut’, zabudnime chvıl’una tlak a vezmime si takyto primitıvny prıpad tecenia kvapaliny:
dS→
v (z)x
Obrazok 4.6: Tok kvapaliny s ploskou rovnobeznou so smerom rychlosti.
Zvol’me si plosku v kontinuu tak, aby jej normala bola kolma na tok kvapaliny (ako na obrazku). Ak by
sme zistili, kam bude smerovat’ plosna sila d~F v tomto prıpade, mozno sa posunieme o kusok d’alej. Ked’zeneuvazujeme tlak, ostava nam iba uz len smer kolmy na normalu d~S (v smere rovnobeznom v idealnejkvapaline posobil tlak). Je intuitıvne jasne, ze vrstvy kvapaliny sa o seba budu suchat’ jedine v prıpade,ked’ v kvapaline nastane nejaky spad rychlosti. Je sanca, ze taketo spravanie vyvola plosnu silu, ktora budemat’ nenulovu zlozku kolmu na normalu plochy. Oznacme si smery v nasom prıpade; smer d~S bude ~e3, smerdo obrazka bude ~e2, smer rychlosti bude ~e1. Ked’ze horna vrstva kvapaliny sa podl’a obrazka hybe troskurychlejsie ako spodna, ma platit’, ze tato horna vrstva posobı na spodnu silou, ktora smeruje doprava:
dF1 = σ13dS3 (4.68)
kde sa uz predpoklada, ze σ13 je nenulove cıslo. Nase uvahy sli tym smerom, ze vel’kost’ tejto sily bude umernaprave spadu rychlosti v smere rovnobeznom s d~S (teda v smere, v ktorom sa menı rychlost’ s polohou). Nechteda platı zufaly predpoklad, ze tato zavislost’ bude priamo umerna:
dF1 ∝∂v1
∂x3(4.69)
Tato umera vyjadruje presne to, co sme chceli – nech zlozka plosnej sily v smere ~e1 je priamo umernaspadu rychlosti v smere ~e3, no jedina zlozka, ktoru rychlost’ v nasom prıpade ma, je prave zlozka ~v1. Pre σ13
by tato uvaha mohla mat’ nasledujuci dosledok:
(dF1 ∝ ∂3v1) ∧ (df1 ∝ σ13) · · · σ13!= η∂3v1 (4.70)
137

4.2. KVAPALINY
Tato vol’ba ma taktiez vyhodu v indexoch – dF1 pozaduje od pravej strany, aby jej nechala vol’ny index1, co naozaj platı, ak σ13 zvolıme prave tak, ako sme ju zvolili:
dF1 = σ13dS3 = η∂3v1dS3 (4.71)
Zatial’ sme vyriesili tenzor σij pre naozaj vel’mi jednoduchy a konkretny prıpad tecenia kvapaliny. Terazprıde iste vel’mi trufale zovseobecnenie pre l’ubovol’ny smer a sposob toku kvapaliny. Co keby to analogickyplatilo pre l’ubovol’ne dva indexy a dokonca v zmysle Einsteinovej sumacnej konvencie? Nech teda platızovseobecnenie:
σ13 = η∂3v1 . . . σij = η∂jvi (4.72)
Teda pre d~F by (bez tlaku) platilo:
dFi = σijdSj = η∂jvi dSj (4.73)
Zdrzme sa zatial’ ovacii a otvarania sampusu, zabudli sme totiz, ze tenzor napatia ma byt’ symetricky,teda ma platit’ σij = σji, ako sme ukazali uz v uvode. Bohuzial’, tento vyraz pre σij nie je symetricky, no tosa da l’ahko napravit’. Tenzor σij mozeme zosymetrizovat’:
σij = η (∂jvi + ∂ivj) (4.74)
Otazne je, ci sme si tymto nepokazili to jednoduche tecenie, bude este stale platit’, ze dF1 = η∂3v1dS3?Ukazuje sa, ze bude, pretoze ∂1v3 = 0 (vzhl’adom na fakt, ze tecenie sa kona iba v smere ~e1).
Finalny a spravny tenzor σij je dany prave odvodenym tenzorom po zahrnutı tlaku:
σij = −pδij + η (∂jvi + ∂ivj) (4.75)
O tomto vyjadrenı si myslıme, ze by mohlo byt’ spravne, ak prejde prudke zovseobecnenie (13)→ (ij)7.Dosad’me takyto tenzor napatia do vseobecnej rovnice kontinua. Dolezite bude vediet’, co je za vyraz ∂jσijpri takomto tvare σij :
∂jσij = −∂ip+ η(∂j∂jvi + ∂j∂ivj︸ ︷︷ ︸
∂i(~∇·~v)
)= −
(~∇p)i+ η
[∆~v + ~∇
(~∇ · ~v
)]i
(4.76)
Vysledna rovnica teda bude mat’ tvar:
ρ
[∂~v
∂t+(~v · ~∇
)~v
]= −~∇p+ ρ~g︸ ︷︷ ︸
Eulerova rovnica
+η∆~v + η~∇(~∇ · ~v
)(4.77)
Prave sme odvodili Navier-Stokesovu rovnicu. Za povsimnutie stojı, ze az do clenov, ktore obsahujukonstantu η, je rovnica totozna s Eulerovou. Taktiez vidno, ze ked’ pribudla viskozita, rovnica je az druhehoradu (menovite v clene ∆~v, kde su az druhe derivacie rychlostneho pol’a).
Pre nestlacitel’ne kvapaliny zanedbavame clen η~∇(~∇ · ~v
), divergencia nestlacitel’nej kvapaliny totiz
musı byt’ nulova.Okrajove podmienky pri Eulerovej a Navier-Stokesovej rovnici urcuju spravanie rychlostneho pol’a na
okraji uvazovaneho objemu (napr. v prıklade s Newtonovym vedrom to boli body, kde sa kvapalina stykalas vedrom). Pri neviskoznej kvapaline uvazujeme, ze rychlost’ kvapaliny pri pevnej hranici bude rovnobeznas touto hranicou, pri viskoznej kvapaline dokonca nulova.
7O jeho spravnosti sa presvedcıme po napısanı rovnıc, ktore z tohto zovseobecnenia vyplyvaju, ich riesenım pre vel’a roznychproblemov a overenım, ci tieto riesenia dobre opisuju skutocnost’. Ak nie, cele to treba premysliet’ znova, ak ano, mozemekonecne otvorit’ tu fl’asu sampusu. Ukazuje sa, ze taketo zovseobecnenie bolo spravne, no tu fl’asu sampusu by sme radsejnemali otvarat’ - alkohol nicı mozgove bunky.
138

4.2. KVAPALINY
4.2.8 Dalsie prıklady z hydrodynamiky riesitel’ne analyticky*
Tecenie v potrubı*
Toto je klasicky priklad pre Navier-Stokesovu rovnicu. Jedna sa o stacionarne, laminarne tecenieviskoznej kvapaliny vo zvislej, nekonecne dlhej rure s polomerom R v gravitacnom poli.
Riadiaca rovnica pre stacionarny tok nestlacitel’nej kvapaliny vychadza z Navier-Stokesovej rovnice so
zanedbanım clenu η~∇(~∇ · ~v
)v dosledku nestlacitel’nosti a zanedbanım clenu ∂t~v v dosledku stacionarnosti
toku:
ρ(~v · ~∇
)~v = −~∇p+ ρ~g + η∆~v
Nech os sumernosti valca, v ktorom kvapalina tecie je totozna s osou z. Gravitacne pole bude mierit’ vsmere −z: ~g = (0, 0,−g).
Okrajova podmieka diktuje, ze kedykol’vek x2 + y2 = R2, tak ~v (x, y, z) = ~0 (nezavisle na z). Z rovnicekontinuity a nestlacitel’nosti kvapaliny dostavame:
∂ρ
∂t+ ~∇ · (ρ~v) = 0 ; ρ (x, y, z, t) = konst. =⇒ ~∇ · ~v = 0 =⇒ ~v = ~∇× ~A
t.j. najvseobecnejsı tvar, aky dokazeme dosiahnut’ pre rychlost’ ~v je taky, ze tato sa da napısat’ ako rotaciaineho vektoroveho pol’a, ~A.
Dosadıme do riadiacej rovnice:
ρ[(~∇× ~A
)· ~∇] (
~∇× ~A)
= −~∇p+ ρ~g + η∆(~∇× ~A
)Po zlozkach:
ρεabc∂bAc∂a (εijk∂jAk) = −∂ip+ ρgi + η∂l∂l (εijk∂jAk)
ρεijkεabc∂Ac∂xb
∂Ak∂xa∂xj
= − ∂p
∂xi+ ρgi + ηεijk
∂Ak∂xl∂xl∂xj
Toto je zjavne slepa ulicka pre akekol’vek ambıcie vypocıtat’ nieco analyticky - rovnica, ktoru sme dostalije nelinearna a skareda 8.
Navier-Stokesova rovnica, aj v takomto zdecimovanom tvare (nestlacitel’na kvapalina, stacionarne riesenie)je bohuzial’ stale nelinearna parcialna diferencialna rovnica druheho radu, teda takmer hocico, co vieme zriesenı linearnych parcialnych diferencialnych rovnıc (napr. Poissonova rovnica, vlnova rovnica, rovnicavedenia tepla, ...), mozeme zahodit’ spolu aj s nejakou vetou o jednoznacnosti riesenia. Jedina zbran, conam ostala, je zdravy rozum a ten nam nasepkava, ake tecenie by tato rovnica logicky podl’a situacie mohlasplnat’. Je nım tecenie, ktore ma len tretiu zlozku rychlosti nenulovu (v smere osi z). K tomuto usudku nasviedla myslienka, ze predsa voda v zvislej rure tecie smerom dole9 (teda v smere osi z), preco teda takyto
napad neskusit’ na rovnicu? Nasu predstavu by splnalo taketo rychlostne pole:
~v =
00
v (x, y, z)
Z rovnice kontinuity dostavame:
∂zv (x, y, z) = 0 =⇒ v (x, y, z) = v (x, y)
8Skareda - skuste si napr. vypısat’ prvu zlozku, t.j. i = 1.9To nie je celkom pravda - pomocou perturbacii sa da nazriet’ do tohto problemu aj inak a zistili by sme, ze aj taka zdanlivo
jednoducha vec ako tok v zvislej rure je v skutocnosti zlozity. No my hl’adame jednoduche a nie zlozite riesenie.
139

4.2. KVAPALINY
Teda rychlostne pole zavisı uz len od x a y. L’ava strana Navier-Stokesovej rovnice bude nulova (casovuderivaciu sme vylucili uz na zaciatku - stacionarnost’ toku), pretoze pre jedinu nenulovu tretiu zlozku ~vdostavame: (
~v · ~∇)v = v
∂v
∂z= 0
Prepıseme si, co z Navier-Stokesovej rovnice ostalo pre prve dve zlozky:
∂p
∂x= 0 ∧ ∂p
∂y= 0 =⇒ p(x, y, z) = p(z)
Pre tretiu zlozku dostavame:
−∂p(z)∂z
+ η∆v(x, y)− ρg = 0
∂p(z)
∂z+ ρg = η∆v(x, y)
F (z) = G(x, y)
Dospeli sme ku celkom prıjemnemu faktu, rovnica sa sama odseparovala. Vidıme, ze l’ava strana jezavisla len od premennej z a prava strana len od premennych x a y. To vsak znamena, ze ak by l’ava strananebola konstantna v premennej z, potom by sa menila s touto premennou, no na pravej strane by nemaloco udrzat’ tuto rovnost’, ked’ze sa v nej premenna z nenachadza. Z toho jednoducho vyplyva, ze obe stranysu konstantne a rovne tej istej konstante K:
∂p(z)
∂z+ ρg = K = η∆v(x, y)
Skumajme prvu rovnost’ - jednoduchu diferencialnu rovnicu s jednoduchym riesenım:
∂p(z)
∂z+ ρg = K =⇒ p(z) = p0 + (K − ρg) z
Druha rovnost’ predstavuje o trochu vacsı problem:
∆v =K
η
Jedna sa o Poissonovu rovnicu, co je parcialna linearna diferencialna rovnica, ktora ma jednoznacneriesenie pre jednoznacne zadane okrajove podmienky v. Tu vstupuje do ulohy ako okrajova podmienkanulovost’ rychlosti kvapaliny tam, kde sa kvapalina styka s rurou, teda kedykol’vek x2 +y2 = R2. Je namiestezacat’ uvazovat’ polarne suradnice. Laplace v tychto suradniciach je mozne najst’ napr. na wikipedii (alebosi ho odvodit’):
v(x, y)→ v(r, ϕ) ∆ =∂2
∂x2+
∂2
∂y2→ ∆ =
1
r
∂
∂r
(r∂
∂r
)+
1
r2
∂2
∂ϕ2
1
r
∂
∂r
(r∂v
∂r
)+
1
r2
∂2v
∂ϕ2=K
η
V tychto suradniciach je mozne ovel’a pohodlnejsie sformulovat’ okrajovu podmienku, a to prave vd’akatomu, ze sme sa presunuli do suradnej sustavy sitej na mieru tvaru rury:
v(r = R,ϕ) = 0
140

4.2. KVAPALINY
Takto definovany problem (Poissonova rovnica + okrajova podmienka) sa nazyva Dirichletova uloha aje dokazane10, ze pre Dirichletovu ulohu existuje jednoznacne riesenie. Ak toto riesenie teraz akymkol’veksposobom uhadneme, bude to ONO hl’adane riesenie. Inak povedane, veta o jednoznacnosti riesenia Dirich-letovej ulohy povysuje hadanie na uplne rigoroznu metodu hl’adania riesenia tejto ulohy. Ked’ze hadanieriesenia je uplne koser sposob riesenia tejto rovnice, skusme si tipnut’, co ak riesenie v (r, ϕ) v skutocnostibude zavisiet’ len od r (teda v uhle ϕ sa nebude diat’ nic zaujımave):
1
r
d
dr
(r
dv
dr
)=K
η
Ked’ze rychlost’ zavisı uz iba od r, budeme derivacie znacit’ ciarkou. Rovnicu riesime standardne, je tototiz uz len obycajna diferencialna rovnica:
1
r(rv′)
′=K
η
(rv′)′
=K
ηr
rv′ =K
2ηr2 + C1
v′ =K
2ηr + C1
1
r
v(r) =K
4ηr2 + C1 ln(r) + C2
Dalej sa riadime sedliackym rozumom a okrajovou podmienkou. Vidıme, ze ak konstanta C1 je roznaod 0, potom pre r → 0 platı v(r) → −∞ (alebo +∞). Toto zrejme nebude uplne najfyzikalnejsie chovanierychlostneho toku (minimalne by to porusovalo princıpy teorie relativity, ktora vsak v Navier-Stokesovychrovniciach nie je prıtomna, no hlavne by to vyrusovalo zdravy rozum). Z tohto chovania sudime, ze C1 = 0.Zaroven musı platit’ okrajova podmienka, z ktorej dostavame vyslednu hodnotu konstanty C2:
v(R) =K
4ηR2 + C2 = 0 =⇒ C2 = −K
4ηR2 =⇒ v(r) =
K
4η
(r2 −R2
)Jedina vec, ktora ostala nedoriesena, je konstanta K. Znovu sa pozrieme, kde dana konstanta vystupo-
vala. Vystupovala v rozlozenı tlaku v kvapaline:
p(z) = (K − ρ g) z + p0
Predstavme si, ze by koeficient pri z nebol nulovy. To ale znamena, ze v takej nekonecne vysokej rure bypo chvıli tlak zacal narastat’ nad vsetky medze a niekde by musel byt’ aj zaporny. To tiez neznie bohvieakorealisticky, preto pozadujeme:
p(z) = p0 = p0 =⇒ K = ρ g
Dostavame vysledny tvar rychlostneho profilu:
v(r) =ρ g
4η
(r2 −R2
)(4.78)
Tento vysledok ocividne sedı s nasou intuitıvnou predstavou, ako take jednoduche laminarne tecenie vrure moze vyzerat’. Jednak vidıme, ze pre vnutro rury dostavame zapornu zlozku rychlosti, co je v poriadku,pretoze kvapalina tecie smerom dole (v zapornom smere osi z). Zaroven dostavame parabolicky profil tohtotecenia, co sa urcite ako klebeta spomınalo uz vselikde, no nazorny nahl’ad dava tento jednoduchy prıklad.Samozrejme, vel’ke zanedbanie prislo uz na zaciatku, kedy sme predpokladali len zvislu zlozku rychlostnehopol’a. Take jednoduche to vo vseobecnosti nie je.
10Dokaz bude na Teorii elektromagnetickeho pol’a
141

4.2. KVAPALINY
Maximalnu rychlost’ dostavame po dosadenı r = 0:
vmax =ρ g R2
4η(4.79)
Celkovy prietok danym miestom (metre kubicke za jednotku casu) spocıtame nasledovnym integralom:
J =
¨
r<R
|v|dS =
ˆ 2π
0
dϕ
ˆ R
0
drρ g
4η
(R2 − r2
)= −πρg
η
ˆ 0
R2
udu =πρgR4
2η(4.80)
Pokusne by sme mohli vyhl’adat’ nejake hodnoty dynamickych viskozıt η pre rozne kvapaliny a skusat’
rozne polomery, naprıklad:
vmax ≈ 101m · s−1 voda v slamke
vmax ≈ 10−2m · s−1 olej v slamke
vmax ≈ 10−3m · s−1 med v slamke
vmax ≈ 105m · s−1 voda v odpadovej rure
(4.81)
Ako slamku sme brali rurku s priemerom 6mm, odpadova rura ma priemer 15cm.Oba vysledky pre vodu vyzeraju podozrivo (prvy prinajmensom podozrivo, druhy priam smiesne),
pre vodu v odpadovej rure sme dostali rychlost’ takmer 100 000 km/h. Problem je v nasom prıstupek prıkladu. Uz na zaciatku sme predpokladali laminarne prudenie, ktore zabezpecuje pekny stacionarnyprofil prudenia vody v rure. Do hry vsak vstupuje ovel’a smutnejsia skutocnost’ a to turbulencia, ktoraje v Navier-Stokesovych rovniciach ticho skryta. Jedna znacne zlozita oblast’ v matematike sa snazı ktomuto problemu pristupovat’ pomocou perturbacii - na zaciatku zavedieme do toku kvapaliny malu poruchu(ktora tam aj realne takmer vzdy je) a sledujeme, ako sa porucha vyvıja priestorovo a s casom. Pri vode,ktora ma vel’mi maly koeficient dynamickej viskozity a pri laminarnom (to je ten pekny, usporiadany)toku ocakavame nerealny prietok 2000 km/h, dostaneme vel’mi vel’ke Reynoldsovo cıslo, ktore vypovedao dominancii zotrvacnych sıl nad viskoznymi silami, teda ocakavame vel’mi silnu turbulenciu. V praxito znamena, ze ak do kvapaliny zavedieme malu poruchu, tato sa skor ci neskor rozvinie do sialenehotoku, ktory, okrem ineho, celkovy prietok kvapaliny potrubım, znacne brzdı. Co ale znacı to, ze napriektymto jednak myslienkam a jednak experimentom, ktore potvrdzuju, ze voda v potrubı malokedy prudirychlost’ou 100 000 km/h, sme dane riesenie dostali z Navier-Stokesovej rovnice? Nic, okrem toho, ze zaistych zidealizovanych podmienok (dokonale cista voda bez odpadu, dokonale rovne a hladke potrubie, abysa nemali o co ciastocky vody zachytit’, dokonaly zdroj, ktory bude zhora vodu hnat’ v presnom valci spresnym rychlostnym profilom) je teoreticky mozne dosiahnut’ laminarne prudenie, ktore bude mat’ peakvelocity 100 000 km/h. Znie to asi rovnako pravdepodobne, ako to, ze sa gul’a udrzı na hrote pera, napriektomu, ze podl’a newtonovej rovnice existuje poloha, v ktorej je vyslednica sıl na nu posobiaca nulova.
Na druhej strane, rychlost’ medu v slamke je dost’ pomala. Ako by sa dala zvysit’? Mohli by sme skusit’
pustit’ stredom slamky prud medu s polomerom R1 v okolı ktoreho by tiekla voda. Tentoraz vstupom avystupom budu dva rychlostne profily, ~v1 a ~v2. Kazdy z nich bude musiet’ splnat’ vlastnu Navier-Stokesovurovnicu a navyse budu musiet’ splnat’ okrajove podmienky jednak na rozhranı med-voda a aj na rozhranıvoda-potrubie.
Pouzijeme rovnaky ansatz pre kazdu rovnicu a dostaneme dve sady rovnıc, ktorych upravy su vzhl’adomna predchadzajucu cast’ zjavne (pretoze su analogicke):
∂p1
∂x= 0 ∧ ∂p1
∂y= 0 =⇒ p1(x, y, z) = p1(z)
142

4.2. KVAPALINY
−∂p1(z)
∂z+ η1∆v1(x, y)− g = 0
∂p1(z)
∂z+ ρ1g = η1∆v1(x, y)
F1(z) = G1(x, y) =⇒ ∂p1(z)
∂z+ ρ1g = K1 = η1∆v1(x, y)
∂p2
∂x= 0 ∧ ∂p2
∂y= 0 =⇒ p2(x, y, z) = p2(z)
−∂p2(z)
∂z+ η2∆v2(x, y)− g = 0
∂p2(z)
∂z+ ρ2g = η2∆v2(x, y)
F2(z) = G2(x, y) =⇒ ∂p2(z)
∂z+ ρ2g = K2 = η1∆v2(x, y)
Kazda z rovnıc vedie k nasledujucim vysledkom:
p1(z) = p10 + (K1 − ρ1g) z
p2(z) = p20 + (K2 − ρ2g) z
v1(r) =K1
4η1r2 + C11ln(r) + C12
v2(r) =K2
4η1r2 + C21ln(r) + C22
++Pre konstantu C11 platı rovnaky argument ako v predoslom prıpade - tok v1 sa kona vo vnutornej casti
trubice (okolo stredu), teda aby rychlost’ nedivergovala, C11 = 0. Dalej musı platit’:
v1(R1) = v2(R1) =⇒ K1
4η1R2
1 + C12 =K2
4η2R2
1 + C21ln(R1) + C22
t.j. spojitost’ rychlostneho pol’a na rozhranı med-voda a d’alej:
v2(R) = 0 =⇒ K2
4η2R2 + C21 ln(R) + C22 = 0
Toto je ocividny a dost’ neprıjemny problem. Pre tri nezname konstanty C mame len dve rovnice, ktoresa ich pokusaju urcit’, co znie tak trochu ako problem. Pod’me sa pozriet’ na to, ako vyzera rozlozenie sılviskozity v kvapaline. Je zjavne, ze pri toku, ktory sme jej ansatzom nanutili, sa sily rozlozia v smere tokukvapaliny, resp. proti nemu tak, ze ak si vezmeme jedno infinitezimalne medzivalcie, teda kusok kvapalinyuzavrety medzi r a r + dr, vieme nahliadnut’, ze z vonkajsej strany na neho posobı iny takyto kusok arovnako tak aj z vnutornej strany. To ako presne nan posobia vlastne urcuje podrobnejsie rychlostny profil.Je intuitıvne jasne, ze aj sila musı byt’ v kvapaline spojita, a teda aj tenzor napatia by mal byt’ spojity (akby na nase medzivalcie posobila z jednej strany sila znacne ina, ako na druhej strane, bolo by to zvlasne atrochu by to odporovalo tomu, aby bolo rychlostne pole spojite). To vieme zarucit’ dodatocnou okrajovoupodmienkou:
η1∂v1(r)
∂r
∣∣∣∣r=R1
= η2∂v2(r)
∂r
∣∣∣∣r=R1
143

4.2. KVAPALINY
A teda dostavame sustavu rovnıc:
K1
4η1R2
1 + C12 =K2
4η2R2
1 + C21ln(R1) + C22
K2
4η2R2 + C21ln(R) + C22 = 0
1
2K1R1 =
1
2K2R1 + η2C21
1
R1
Z tejto vyjadrıme konstanty C12, C21 a C22:
C21 =R2
1
2η2(K1 −K2)
C22 = −K2
4η2R2 − R2
1
2η2(K1 −K2) ln(R)
C12 =R2
1
4
(K2
η2− K1
η1
)− K2
4η2R2 +
R21
2η2(K1 −K2) ln
(R1
R
)Analogicky ku postupu predtym urcıme konstanty K1 a K2:
K1 = ρ1g
K2 = ρ2g
Vysledny profil rychlosti medu bude:
v1(r) =ρ1g
4η1
(r2 −R2
1
)− ρ2g
4η2
(R2 −R2
1
)+R2
1g
2η2(ρ1 − ρ2) ln
(R1
R
)(4.82)
Urcıme jeho prietok:
J =
¨
r<R
|v|dS =πρ1gR
41
2η1− πρ2gR
21
4η2
(R2 −R2
1
)+πR4
1g
2η2(ρ1 − ρ2) ln
(R1
R
)Zmaximalizovat’ prietok mozno posuvanım R1 - ak bude R1 dostatocne blızko stredu, bude pruzok medu
dost’ rychly, no vel’a nepotecie, pretoze jeho rozmer bude maly. Ak budeme posuvat’ R1 ku R, pruzok medubude sirsı, no bude pomalsı. Preto derivaciou J podl’a R1 zıskame funkciu, ktorej nulove body budu urcovat’
extremy prietoku medu:
∂J
∂R1= πgR3
1
(2ρ1
η1+
ρ2
2η2
)− πρ2gR1
2η2
(R2 −R2
1
)+
2πgR31
η2(ρ1 − ρ2) ln
(R1
R
)+πR3
1g
2η2(ρ1 − ρ2) (4.83)
Rovnica ∂J∂R1
= 0 nie je riesitel’na analyticky explicitne, no je mozne si dat’ vykreslit’ tento prietok prekonkretne hodnoty g, ρ1, η1, ρ2, η2 a R, ktore sme uz pouzıvali. Graf nie je nijako zaujımavy, jeden koren sanachadza v R1 = 0, i ked’ no funkcia v tomto bode nie je spojita, no da sa spojite dodefinovat’. Podl’a grafuby sme vsak odhadli, ze sa jedna len o inflexny bod (navyse vieme, ze pre R1 = 0 je prietok medu identickynulovy). Jediny kladny realny koren je v tomto prıpade priblizne 1.25 · 10−3m a to je prave hodnota medzi0 a polomerom celej slamky.
R1 ≈ 1.25 mm Idealny vnutorny polomer stlpceku medu pre maximalizaciu jeho prietoku (4.84)
144

4.2. KVAPALINY
Nestacionarne tecenie v potrubı**
V predoslom prıklade sme v istom bode dosli ku rovnici:
−∂p(z)∂z
+ η∆ v(x, y)− ρg = 0 (4.85)
Uvazujme teraz, ze prudenie nebude stacionarne, ale bude zavisiet’ aj od casu. Rovnica prejde na tvar:
∂v(x, y, t)
∂t= −∂p(z, t)
∂z+ η∆ v(x, y, t)− ρg (4.86)
Hned’ vidıme, ze tak ako aj v predoslom prıpade, p moze byt’ nanajvys linearnou funkciou z:
∂v(x, y, t)
∂t− η∆ v(x, y, t) + ρg = −∂p(z, t)
∂z=⇒ p(z, t) = a(t)z + b(t) (4.87)
S odvolavkou na predosly prıklad znovu polozıme a(t) rovne nule11 a dostavame:
∂v
∂t− η∆ v = −ρg (4.90)
Jedna sa o nehomogennu rovnicu difuzie pre velicinu v(x, y, t) s konstantnou pravou stranou. Znovuprejdeme do polarnej sustavy:
v (x, y, t)→ (r, ϕ, t) ∆ =∂2
∂r2+
1
r
∂
∂r+
1
r2
∂2
∂ϕ2(4.91)
Rovnica difuzie na svoje uspesne vyriesenie konzumuje nasledovne okrajove a pociatocne podmienky:
v (R,ϕ, t) = Vo (ϕ, t) ≡ 0
v (r, ϕ, 0) = v0 (r, ϕ)(4.92)
kde na okraji sme identicky zadali nulovy tok, ked’ze tak diktuje podmienka nuloveho sklzu viskoznej kva-paliny na pevnej hranici.
Mame teda parcialnu diferencialnu rovnicu12, spolu s okrajovou a pociatocnou podmienkou:
∂v
∂t− η∆ v = −ρg v (R,ϕ, t) = 0
v (r, ϕ, 0) = v0 (r, ϕ)(4.93)
Toto je linearna diferencialna rovnica a da sa dokazat’ existencia a jednoznacnost’ jej riesenia, co sa namhodı, pretoze to riesenie v skutocnosti (rafinovane) uhadneme. V skutocnosti sa jedna o nehomogennu rovnicudifuzie, respektıve rovnicu vedenia tepla, kde nehomogenitu sposobuje nenulova prava strana. Pozitıvum je,ze jej nehomogenita je najnevinnejsia aka len moze byt’ a to konstantna.
11Stacı si rozmysliet’ nieco taketo:
a(t) 6= 0⇔ ∀a(t) ∀P0 > 0 ∃z, t0 : a(t0)z + b(t) > P0 − neohranicenost’ tlaku (4.88)
Poprıpade nasledovne:
a(t) 6= 0⇔ ∀a(t) 6= 0 ∃z, t0 : a(t0)z + b(t) < 0 − nutna zapornost’ tlaku niekde pozdlz potrubia (4.89)
12Druheho radu v priestorovej casti a prveho radu v casovej. Potrebujeme teda jednu okrajovu podmienku a jednu pociatocnupodmienku.
145

4.2. KVAPALINY
Riesenie hl’adajme v tvare:
v (r, ϕ, t) =∑n,k
Tnk(t)Ψnk (r, ϕ) (4.94)
kde Tnk je nejaka casova zlozka, ktorej tvar zistıme v priebehu riesenia a Ψnk (r, ϕ) je n, k-ta13 vlastnafunkcia Laplacianu v kruhu s polomerom R, ktorej prisluchajuca vlastna hodnota je −λnk. Motivaciu ktomuto kroku uvidıme o par riadkov nizsie. Predpokladame, ze aj prava strana je vo vseobecnosti funkcioucasu a polohy, teda vo vseobecnosti platı:
−ρg =∑n,k
Fnk(t)Ψnk (r, ϕ) (4.95)
To je mozne len ak Ψnk (r, ϕ) tvoria uplny ortogonalny system funkciı na intervale 〈0, R〉 × 〈0, 2π).Potom takyto rozklad existuje a koeficienty rozkladu, Fnk(t) budu dane vzt’ahom:
Fnk(t) = A2nk
¨
r≤R
r (−ρg) Ψnk (r, ϕ) drdϕ, Ank ≡
¨r≤R
r |Ψnk (r, ϕ)|2 drdϕ
−1/2
(4.96)
Toto je vseobecny vzt’ah pre akykol’vek system ortogonalnych funkciı. Integral obsahujuci ρg predstavujesamotny rozklad do vlastnych funkciı, konstanta Ank zabezpecuje normalizaciu14. Podintegralny clen rprichadza z Jakobianu dS = r dr dϕ. Vidıme, ze funkcie Fnk(t) su vd’aka konstantnosti pravej strany tiezlen konstanty Fnk. Samotna okrajova podmienka ma tiez svoj rozklad:
v0 (r, ϕ) =∑n,k
CnkΨnk (r, ϕ) (4.97)
Cnk = A2nk
¨
r≤R
r v0 (r, ϕ) Ψnk (r, ϕ) drdϕ (4.98)
Dosad’me teraz (4.94) a (4.95) do (4.93):
∂v
∂t− η∆ v = −ρg∑
n,k
TnkΨnk − η∑n,k
Tnk∆ Ψnk =∑n,k
FnkΨnk
V tomto kroku by nam vel’mi vyhovovalo, aby sme vsetky vyrazy mohli obriadit’ jednou sumou, v ktorejby sa navyse dala odseparovat’ casova zavislost’. To vsak mozeme, pretoze sme sa dohodli, ze Ψnk su vlastnefunkcie Laplacianu s vlastnymi hodnotami −λnk. Platı teda:
∆ Ψnk = −λnkΨnk15 (4.99)
Vieme teda odseparovat’ casovu zavislost’:∑n,k
(Tnk(t) + ηλnkTnk(t)− Fnk
)Ψnk = 0 (4.100)
13To, ze na vysledny rad treba 2 indexy, nahliadneme v priebehu riesenia. Pocet indexov priamo suvisı s rozmerom oblasti,na ktorej rovnicu riesime.
14Ak by system bol ortonormalny a nielen ortogonalny, konstanty Ank by sme nemuseli pısat’, pretoze integral, ktorym ichpocıtame by bol identicky rovny jednej.
15Bez sumacnej konvencie.
146

4.2. KVAPALINY
Znovu prekvapivo vyuzijeme ortogonalitu systemu funkciı Ψnk, z ktorej vyplyva, ze tato rovnost’ mozebyt’ splnena jedine ak:
∀n, k : Tnk(t) + ηλnkTnk(t)− Fnk = 0
Tnk(t) + ηλnkTnk(t) = Fnk (4.101)
Rovnica (4.101) je obycajna linearna diferencialna rovnica, pre ktoru mame dokonca aj pociatocnupodmienku. Vskutku, z (4.94) a (4.97) vyplya, ze:
Tnk(0) = Cnk (4.102)
Navyse vieme, ze Fnk su konstanty (pretoze prava strana je konstantna v case). Rovnicu (4.101) spociatocnou podmienkou (4.102) tak mozeme riesit’ aj s tym, co uz vieme:
Tnk(t) + ηλnkTnk(t) = Fnk
/· eηλnkt, t→ τ
Tnk(τ)eηλnkτ + ηλnkTnk(τ)eηλnkτ︸ ︷︷ ︸=
d
dτ
(Tnk(τ)eηλnkτ
) = Fnkeηλnkτ
/ ˆ t
0
dτ
Tnk(t)eηλnkt − Tnk(0)︸ ︷︷ ︸=Cnk
=1
ηλnkFnk
(eηλnkt − 1
)
Tnk(t) =Fnkηλnk
+
(Cnk −
Fnkηλnk
)e−ηλnkt (4.103)
Aby sme dokoncili riesenie, musıme poznat’ vlastne funkcie Laplacianu v kruhu. Menovite pre vlastnufunkciu Ψ musı platit’:
∆ Ψ (r, ϕ) = −λΨ (r, ϕ) , Ψ (R,ϕ) ≡ 0, λ ∈ R+0 (4.104)
Nulovost’ na okraji je vseobecna vlastnost’ vlastnych funkciı akehokol’vek linearneho operatora, tatopodmienka navyse vyrazne zjednodusuje riesenie (4.94). Pre takto definovany problem sa da dokazat’, zesamotne vlastne hodnoty −λ prisluchajuce jednotlivym vlastnym funkciam su nekladne, preto λ ∈ R+
0 .Pouzijeme klasicku separaciu premennych:
Ψ (r, ϕ) = R(r)Φ(ϕ), R′ ≡ dR
dr, Φ′ ≡ dΦ
dϕ(4.105)
Tento tvar dosadıme do (4.104) a vyuzijeme (4.91):
R′′Φ +1
rR′Φ +
1
r2RΦ′′ = −λRΦ
/r2
Ψ
r2R′′
R+ r
R′
R+
Φ′′
Φ= −λ r2
/− Φ′′
Φ+ λ r2
r2R′′
R+ r
R′
R+ λ r2 = −Φ′′
Φ(4.106)
L’ava strana poslednej rovnice zavisı len od r, prava strana len od ϕ. Z toho usudzujeme, ze obe musiabyt’ rovne nejakej konstante, menovite k > 016.
16Schvalne danu konstantu nutime do toho, aby bola nezaporna. Dovodom je periodicita Ψ (r, ϕ) v premennej ϕ, ktora byinak nemala sancu na splnenie.
147

4.2. KVAPALINY
Separatne riesime konstantnost’ oboch stran rovnice (4.106), najprv pre Φ (ϕ):
−Φ′′
Φ= k =⇒ Φ′′ = kΦ =⇒ Φ (ϕ) = A cos
(√kϕ)
+B sin(√
kϕ)
(4.107)
Po zohl’adnenı podmienky Ψ (r, ϕ+ 2π) = Ψ (r, ϕ) dostavame podmienku na k:
√k = n ∈ N =⇒ k = n2, Φ (ϕ) = A cos (nϕ) +B sin (nϕ) (4.108)
Riesime rovnicu pre R(r):
r2R′′
R+ r
R′
R+ λ r2 = n2
/R (4.109)
r2R′′ + rR′ + λ r2R = n2R
/− n2R (4.110)
r2R′′ + rR′ +(λ r2 − n2
)R = 0 (4.111)
Transformujeme premennu r nasledovne:
r =ξ√λ
(4.112)
Rovnica (4.111) prejde na tvar:
ξ2 d2R
dξ2+ ξ
dR
dξ+(ξ2 − n2
)R = 0 (4.113)
Nejakym sposobom v tejto rovnici spozname Besselovu diferencialnu rovnicu, ktorej riesenım je, akoinak, Besselova funkcia.
Rovnica (4.113) je obycajna linearna diferencialna rovnica druheho radu so singularitou v bode ξ = 017.To, ze je to rovnica druheho radu znamena, ze ako fundamentalny system riesenı posluzia prave dve linearnenezavisle funkcie. Fakt, ze rovnica ma singularitu v bode 0 zase sposobı, ze jedna z nich bude v danom bodeneohranicena. Keby sme sa teda aj pokusali najst’ obe funkcie pomocou Taylorovho rozvoja v okolı ξ = 0,najdeme nanajvys len jednu, pretoze Taylorov rad neohranicenej funkcie v bode nespojitosti neexistuje.
Dve riesenia tvoriace fundamentalny system riesenı teda budu Besselova funkcia prveho a druhehodruhu, z ktorej prva je ohranicena v okolı 0, druha nie je. Ked’ze my hl’adame len fyzikalne riesenie (aneohraniceny tok v 0 neznie fyzikalne), berieme len tu prvu, ktora sa bezne oznacuje ako Jn:
R (ξ) = AJn (ξ) =⇒ Rn (r) = AJn
(√λr)
(4.114)
Kazda z funkciı Jn(x) ma nekonecne mnoho korenov. Ako Z(n; j) oznacıme j-ty nenulovy koren n-tejBesselovej funkcie prveho druhu. Podmienka Ψ (R,ϕ) = 0 kladie teraz podmienku na λ:
0 = Rn (R) = AJn
(√λR)
=⇒√λR
!= Z(n; j) =⇒ λnj =
(Z(n; j)
R
)2
(4.115)
17To spozname napr. z toho, ze nekonstantny koeficient pri najvyssej derivacii nadobuda hodnotu 0 pri ξ = 0, co sposobujeredukciu diferencialneho radu rovnice v danom bode. Takyto ukaz volame singularita a vzdy vedie aj na funkcie, ktore nie suohranicene v danom singularnom bode.
148
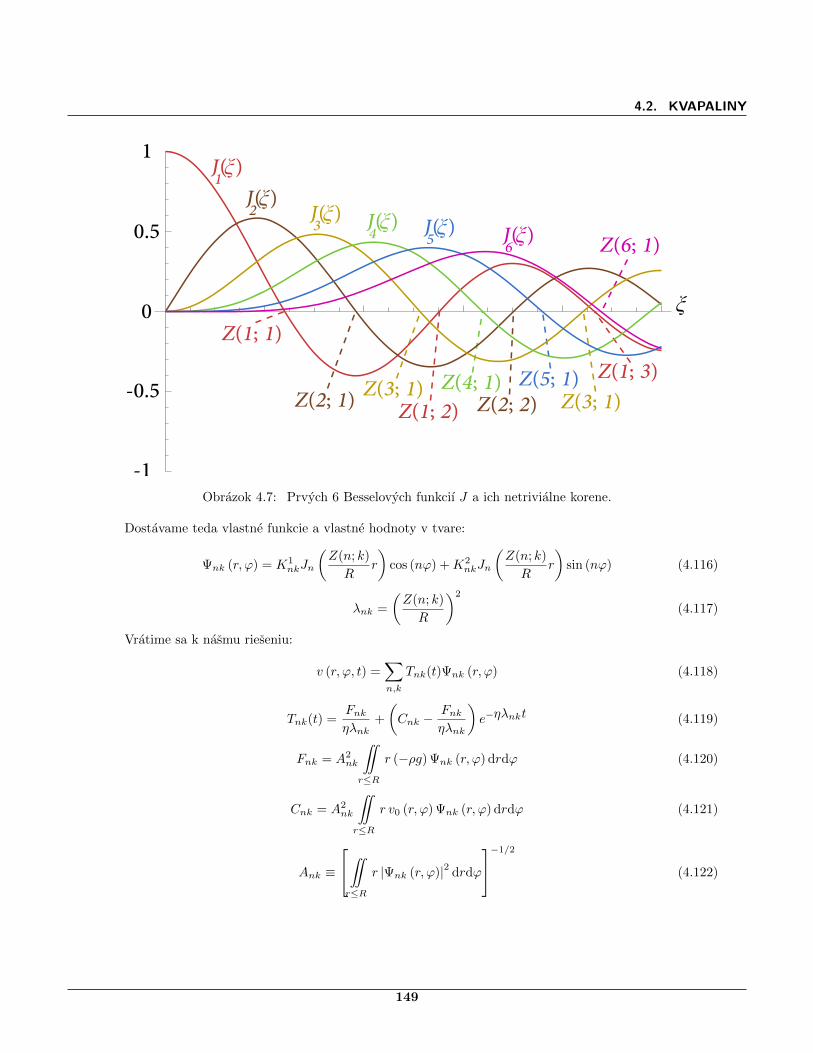
4.2. KVAPALINY
J( )ξ 1
J( )ξ 2 J( )ξ
3 J( )ξ 4 J( )ξ
5 J( )ξ 6
Z(1; 1)
Z(1; 2)Z(2; 1)
Z(3; 1) Z(4; 1)Z(2; 2)
Z(5; 1)
Z(6; 1)
Z(1; 3)
Z(3; 1)
0
0.5
1
-0.5
-1
ξ
Obrazok 4.7: Prvych 6 Besselovych funkciı J a ich netrivialne korene.
Dostavame teda vlastne funkcie a vlastne hodnoty v tvare:
Ψnk (r, ϕ) = K1nkJn
(Z(n; k)
Rr
)cos (nϕ) +K2
nkJn
(Z(n; k)
Rr
)sin (nϕ) (4.116)
λnk =
(Z(n; k)
R
)2
(4.117)
Vratime sa k nasmu rieseniu:
v (r, ϕ, t) =∑n,k
Tnk(t)Ψnk (r, ϕ) (4.118)
Tnk(t) =Fnkηλnk
+
(Cnk −
Fnkηλnk
)e−ηλnkt (4.119)
Fnk = A2nk
¨
r≤R
r (−ρg) Ψnk (r, ϕ) drdϕ (4.120)
Cnk = A2nk
¨
r≤R
r v0 (r, ϕ) Ψnk (r, ϕ) drdϕ (4.121)
Ank ≡
¨r≤R
r |Ψnk (r, ϕ)|2 drdϕ
−1/2
(4.122)
149

4.2. KVAPALINY
Aj ked’ by to bolo vel’mi zaujımave, nic nejdeme pocıtat’, len si ukazeme zaujımavu vlastnost’ tychtoriesenı. Dosadıme Tnk(t) do vseobecneho riesenia:
v (r, ϕ, t) =∑n,k
Fnkηλnk
Ψnk (r, ϕ)︸ ︷︷ ︸= v∞ (r, ϕ)
+∑n,k
(Cnk −
Fnkηλnk
)e−ηλnktΨnk (r, ϕ) (4.123)
Skumajme funkciu v∞ (r, ϕ):
v∞ (r, ϕ) ≡∑n,k
Fnkηλnk
Ψnk (r, ϕ) (4.124)
Budeme predpokladat’, ze funkcia v∞ je hladka (vo vsetkych premennych) a rad z druhych derivaciipodl’a r a ϕ rovnomerne konverguje. Aplikujme teda Laplaceov operator na obe strany:
∆ v∞ (r, ϕ) =∑n,k
Fnkηλnk
∆ Ψnk (r, ϕ) (4.125)
Nebudeme rozpisovat’ vyrazy, miesto toho si uvedomıme, ze ∆ Ψnk = −λnkΨnk =⇒ ∆ Ψnk/λnk = −Ψnk:
∆ v∞ (r, ϕ) = −1
η
∑n,k
FnkΨnk (r, ϕ) =ρg
η(4.126)
Toto je vsak rovnica zhodna s rovnicou pre ustalene laminarne tecenie vo valci. Riesenie pre v∞ (r, ϕ)
takisto splna nulovost’ na okraji, to ale znamena, ze riesenie v∞ (r, ϕ) je zhodne s riesenım, ktore sme nasliv (4.78). Su zhodne vd’aka vete o jednoznacnosti riesenia Poissonovej rovnice18.
Ako uz iste tusıte, druhy clen v (4.123) bude pre t→∞ nulovy. Da sa ukazat’, ze pre hladke pociatocnepodmienky v0 (r, ϕ) platı, ze druhy clen v (4.123) je rovnomerne konvergentny rad na t ∈ 〈ε,∞) , ε > 0,teda mozno zamenit’ poradie limity a sumy a dostaneme zelany vysledok:
limt→∞
v (r, ϕ, t) = v∞ (r, ϕ) =ρg
4η
(r2 −R2
)(4.127)
18V tomto prıpade prava strana rovnice je rovnaka a aj okrajove podmienky su rovnake, teda podl’a vety o jednoznacnostiriesenia aj riesenie je len jedno - to, ktore sme uz nasli predtym.
150

4.2. KVAPALINY
Potencialove obtekanie nekonecneho zvisleho valca**
Potencialove tecenie je stacionarne nevırove tecenie nestlacitel’nej neviskoznej kvapaliny. Tato budeobtekat’ okolo nekonecneho valca polomeru R polozeneho do cesty toku tak, aby jeho os symetrie bola kolmana ~v. Obrazok:
?
Obrazok 4.8: Ake bude stacionarne nevırove tecenie nestlacitel’nej neviskoznej kvapaliny okolo nekonecnehovalca?
Pri riesenı vyuzijeme dvojrozmernost’ toku a jeho nevırovost’:
~∇× ~v = ~0 =⇒ ∃U (x, y) ; ~∇U = ~v
teda existencia skalarneho potencialu toku kvapaliny.Z rovnice kontinuity mame pre nestlacitel’nu kvapalinu podmienku:
~∇ · ~v = 0 =⇒ ∆U = 0
co je Laplaceova rovnica.Na to, aby bolo jej riesenie jednoznacne, potrebujeme okrajovu podmienku. Jedna z podmienok je, ze
tecenie v nekonecne je len v smere zl’ava doprava, teda pre polohy d’aleko od valca platı:
~v = v0 ~e1
Jedna sa o neviskoznu kvapalinu, teda pri valci nebude tok nulovy, ale stale platı, ze musı byt’ rovnobeznys povrchom valca, teda jeho kolma zlozka musı byt’ nulova:
x2 + y2 = R2 =⇒ ~v · ~n = 0
Bolo by vyhodne prejst’ k polarnym suradniciam (cisto formalne do cylindrickych, no zlozka z odvsadial’
vypadne). Laplace v tychto suradniciach ma tvar:
∆ =1
r
∂
∂r
(r∂
∂r
)+
1
r2
∂2
∂ϕ2
Okrajove podmienky pre ~v sme vyriesili, teraz ich treba pretavit’ do funkcie U . Jej tvar d’aleko od valcamusı byt’:
U = v0x+ konst. = v0r cos (ϕ) + konst.
151

4.2. KVAPALINY
Druha okrajova podmienka je trochu zlozitejsia. Napısme si, co je vlastne gradient v polarnychsuradniciach:
~∇U =∂U
∂r~er +
1
r
∂U
∂ϕ~eϕ
Ma platit’:
r = R =⇒(~∇U
)· ~n = 0
Lenze ~n je prave jednotkovy vektor v smere kolmom na povrch valca. No to je prave vektor ~er vpolarnych suradniciach (ak os valca je v nule), preto mozeme pısat’:
∂U
∂r
∣∣∣∣∣r=R
= 0
Najdime teda riesenie Laplaceovej rovnice s takymito okrajovymi podmienkami:
∆U (r, ϕ) = 0 ;∂U
∂r
∣∣∣∣∣r=R
= 0 ∧ U = v0r cos (ϕ) + konst. ;r
R 1
Skusenost’ ukazuje, ze Laplaceova rovnica sa da separovat’, ak U je v tvare sucinu zlozky, ktora zavisılen od r a zlozky, ktora zavisı len od ϕ:
U (r, ϕ) = R (r) Φ (ϕ)
Kvoli setreniu miesta nebudeme vypisovat’ ani derivacie (miesto nich dame ciarku), ani argumenty - jejasne, ze ciarka pri R je derivacia podl’a r. Separujme teda Laplaceovu rovnicu:
∆U = 0
1
r
∂
∂r(rR′Φ) +
1
r2RΦ′′ = 0
R′′Φ +1
rR′Φ +
1
r2RΦ′′ = 0
/r2
RΦ
r2R′′
R+r R′
R= −Φ′′
Φ
Dostali sme separovanu rovnicu - obe strany zavisia od inej premennej, co ale nutne znamena, ze obestrany su konstanty - a to rovnake. Oznacme ju K 19:
r2R′′
R+r R′
R= −Φ′′
Φ= K
Pre Φ tak dostavame:
−Φ′′
Φ= K =⇒ Φ (ϕ) = A cos
(√Kϕ)
+B sin(√
Kϕ)
Uplne prirozdena poziadavka na funkciu Φ je, aby bola 2π− periodicka. Ak by totiz nebola, funkcia Rby mohla robit’ hocico, uz nikdy by nezosila funkciu U na rozhranı ϕ = 0 a ϕ = 2π (co je to iste) tak, abybola spojita. Dostavame teda podmienku na konstantu K:
√K = n ∈ N =⇒ Kn = n2
19Ak by sme ju oznacili opacnym znamienkom, dosli by sme ku rieseniam v podobe sinh a cosh, ktore ale pre ϕ cast’ riesenianevyhovuju.
152

4.2. KVAPALINY
Pre R zlozku sme dostali rovnicu:
r2R′′
R+r R′
R= Kn
r2R′′ + r R′ −KnR = 0
Toto je homogenna diferencialna rovnica, ktorej riesenie hl’adame v tvare:
R(r) = rα
α (α− 1) rα + α rα −Knrα = 0
α2 = Kn =⇒ αn = ±n
Vysledna funkcia U bude superpozıcia vsetkych prıpustnych funkciı s prıslusnymi koeficientami:
U (r, ϕ) =
∞∑n=0
(anr
n + bnr−n) (An cos (nϕ) +Bn sin (nϕ))
Pripomıname, ze ak najdeme akekol’vek riesenie, ktore bude splnat’ okrajove podmienky, bude jedinevd’aka vete o jednoznacnosti riesenia. Skusme konecnym poctom clenov casti R splnit’, aby U (R,ϕ) = 0 azaroven, aby fungovala podmienka v nekonecne. To sa da, ale len vtedy, ak zahodıme vsetky casti rn okremtej, kde n = 1 - ak by sme to neurobili, riesenie v nekonecne by nebolo umerne r cos (ϕ). Vidıme, ze v riesenımusı byt’ prıtomny clen v0r cos (ϕ):
U (r, ϕ) = v0r cos (ϕ) +
∞∑n=0
r−n (An cos (nϕ) +Bn sin (nϕ))
Podl’a okrajovej podmienky pri valci mame:
∂U
∂r
∣∣∣∣∣r=R
= 0 =⇒ v0 cos (ϕ)−∞∑n=1
nR−n+1 (An cos (nϕ) +Bn sin (nϕ)) =
v0cos (ϕ) =
∞∑n=0
nR−n+1 (An cos (nϕ) +Bn sin (nϕ))
Z matematickej analyzy, konkretne z casti o Fourierovych radoch a o trigonometrickom polynome vieme,ze funkciu cos (ϕ) nemame ako inak rozlozit’ do ostatnych trigonometrickych funkciı (t.j. do inych funkciısin (nϕ) a cos (nϕ)), ako len tak, ze zoberieme prave cos (ϕ) 20. Teda potom nutne An = 0 pre n 6= 1 aBn = 0 a dostavame:
v0cos (ϕ) = A1cos (ϕ)
Zo vsetkych zloziek nam ostali jedine dve - ta, ktora je umerna r cos (ϕ) a ta, ktora je umerna 1r cos (ϕ):
U (r, ϕ) = v0r cos (ϕ) +A11
rcos (ϕ)
Vidıme, ze okrajova podmienka v nekonecne je splnena - to sme od nej aj ziadali. Taktiez okrajovapodmienka pri valci bude splnena, Ak:
∂U
∂r
∣∣∣∣∣r=R
= v0cos (ϕ)−A11
R2cos (ϕ) = 0 =⇒ A1 = R2
20Tento fakt v sebe obnasa ortogonalita a uplnost’ systemu trigonometrickych funkciı na intervale 〈0, 2π).
153

4.2. KVAPALINY
Dostali sme teda kompletne riesenie Laplaceovej rovnice s istotou, ze je jedine:
U (r, ϕ) = v0
(r +
R2
r
)cos (ϕ)
Vysledok prepıseme do kartezskej sustavy a vratime sa k rychlostnemu pol’u:
U (x, y) = v0
(r +
R2
r
)cos (ϕ) = v0
(1 +
R2
r2
)rcos (ϕ)︸ ︷︷ ︸
=x
= v0x
(1 +
R2
x2 + y2
)
vx = v0
(1−
R2(x2 − y2
)(x2 + y2)
2
)
vy = −v02R2xy
(x2 + y2)2
Z Bernoulliho rovnice zıskame vyjadrenie pre tlak:
1
2ρ~v 2 + p =
1
2ρv2
0 + p∞ =⇒ p =1
2ρ(v2
0 − v2)
+ p∞
V tejto rovnici sme si zvolili dva body - jeden niekde blızko valca, v tom bode je rychlost’ v a skumanytlak je p. V druhom bode, d’aleko od valca je rychlost’ toku smerom doprava stabilnou vel’kost’ou v0 a tlak vnekonecne sme oznacili p∞.
Na vyjadrenie tlaku sa hodı polarna sustava. Vd’aka kolmosti ~er a ~eϕ platı:
v2 = v2r + v2
ϕ = U ′ 2r +1
r2U ′ 2ϕ = v2
0
(1− R2
r2
)2
cos2 (ϕ) + v20
(1 +
R2
r2
)2
sin2 (ϕ) =
= v20
(1 +
R4
r4
)− v2
0
2R2
r2
(cos2 (ϕ)− sin2 (ϕ)
)= v2
0
(1 +
R4
r4− 2R2
r2cos (2ϕ)
)Teraz mozeme vyjadrit’ tlak v polarnej sustave:
p (r, ϕ) =1
2ρv2
0
(2R2
r2cos (2ϕ)− R4
r4
)+ p∞
V kartezskej sustave bude mat’ trochu skaredsı tvar:
p (x, y) =1
2ρv2
0
2R2(x2 − y2
)−R4
(x2 + y2)2 + p∞
Vidıme, ze v okolı valca, teda r & R je najvacsı tlak pri ϕ = 0 a ϕ = π, naopak, najmensı tlak nastavapri ϕ = π/2 a ϕ = 3π/2.
154
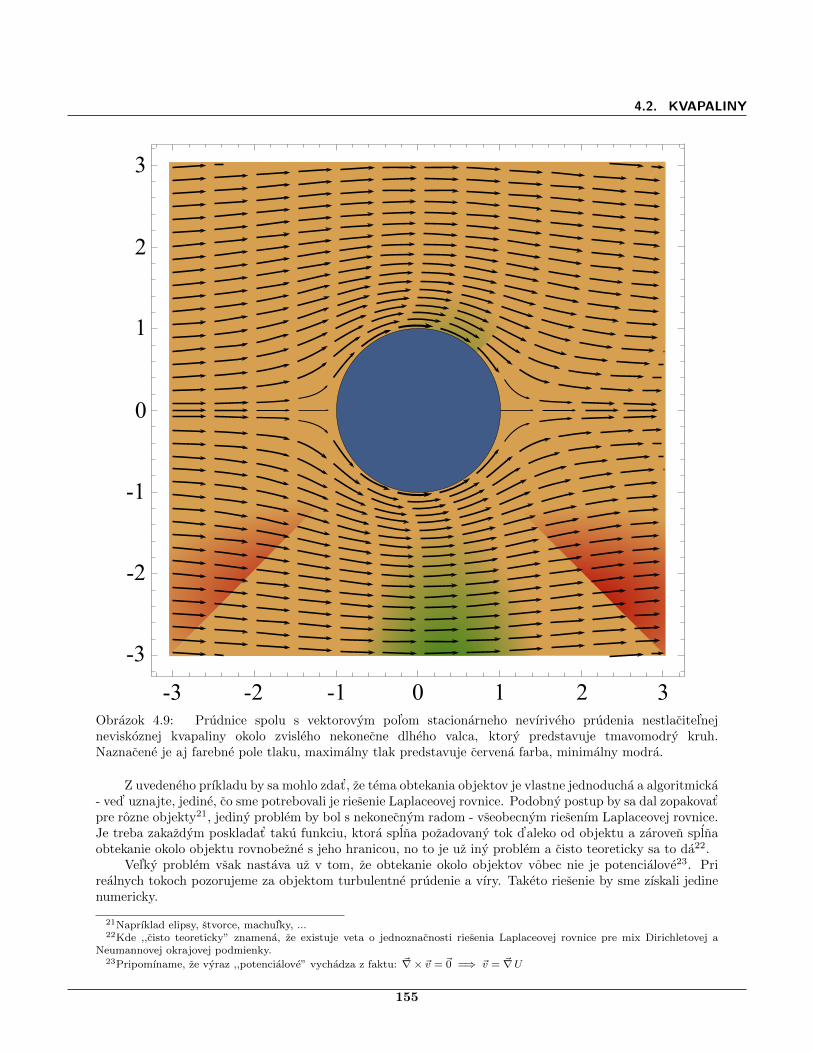
4.2. KVAPALINY
1
2
3
0
-1
-2
-3
0 1 2 3-1-2-3Obrazok 4.9: Prudnice spolu s vektorovym pol’om stacionarneho nevıriveho prudenia nestlacitel’nejneviskoznej kvapaliny okolo zvisleho nekonecne dlheho valca, ktory predstavuje tmavomodry kruh.Naznacene je aj farebne pole tlaku, maximalny tlak predstavuje cervena farba, minimalny modra.
Z uvedeneho prıkladu by sa mohlo zdat’, ze tema obtekania objektov je vlastne jednoducha a algoritmicka- ved’ uznajte, jedine, co sme potrebovali je riesenie Laplaceovej rovnice. Podobny postup by sa dal zopakovat’
pre rozne objekty21, jediny problem by bol s nekonecnym radom - vseobecnym riesenım Laplaceovej rovnice.Je treba zakazdym poskladat’ taku funkciu, ktora splna pozadovany tok d’aleko od objektu a zaroven splnaobtekanie okolo objektu rovnobezne s jeho hranicou, no to je uz iny problem a cisto teoreticky sa to da22.
Vel’ky problem vsak nastava uz v tom, ze obtekanie okolo objektov vobec nie je potencialove23. Prirealnych tokoch pozorujeme za objektom turbulentne prudenie a vıry. Taketo riesenie by sme zıskali jedinenumericky.
21Naprıklad elipsy, stvorce, machul’ky, ...22Kde ,,cisto teoreticky” znamena, ze existuje veta o jednoznacnosti riesenia Laplaceovej rovnice pre mix Dirichletovej a
Neumannovej okrajovej podmienky.23Pripomıname, ze vyraz ,,potencialove” vychadza z faktu: ~∇× ~v = ~0 =⇒ ~v = ~∇U
155

4.3. PRUZNE KONTINUUM
4.3 Pruzne kontinuum
Zakladna velicina, ktora nam davala predstavu o tom, co robı kvapalina, bolo jej rychlostne pole ~v.V pruznom kontinuu bude jeho hlavny predstavitel’ pole posunutı, ~u. Nepredstavujeme si, ze by sa pruznekontinuum niekam d’aleko samo hybalo, navyse si budeme predstavovat’, ze pri vystavenı pruzneho kontinuanejakej sile, su tieto posunutia ~u male.
4.3.1 Tenzor deformacie
Pre taketo pole by bolo vhodne zaviest’ kriterium, kedy sa da povedat’, ze doslo k deformacii - je jasne,ze ak zoberieme nase kontinuum a presunieme ho o 10m dol’ava, k ziadnej deformacii nedoslo. Takisto, ak hootocıme hore nohami, tiez nedoslo k deformacii. Bolo by teda dobre si ujasnit’, co to je vlastne ta deformacia.To zatial’ nevieme, tak si aspon ujasnime, co to deformacia nie je. Uz sme zistili, ze posunutia a otocenienie je deformacia, teda deformacia nie je izometria. Izometria su take transformacie, ktore zachovavajuvzdialenosti. Crta sa moznost’, ako spoznat’, ze sa dva body od seba oddialili. Ak vezmeme vyraz ∂iuj ,tento bude zjavne nulovy pri vsetkych posunutiach, no na rozt’ahovanie zareaguje nenulovost’ou. Otazne je,ci je mozne takyto vyraz oklamat’ otocenım (t.j. ze bude nenulovy pri otacanı, co je zle). Preto skumajmeotocenie celeho kontinua o uhol δϕ okolo osi urcenej vektorom ~n. Poloha l’ubovol’neho bodu sa tak zmenı:
~r → ~r + δϕ~n× ~r
Vypocıtajme ∂iuj pre takuto rotaciu:
ui = ε~n× ~r =⇒ ∂iuj = δϕεjkl∂inkxl = δϕεjklnkδil = δϕεijknk 6= 0
Bohuzial’, zistili sme, ze vyraz ∂iuj je nenulovy aj pri rotacii, co nie je vlastnost’, ktora nam vyhovuje. Nadruhej strane, dostali sme, ze ∂iuj pre rotaciu je antisymetricky vyraz. Uz mame skusenost’, ze kombinaciasymetrickeho a antisymetrickeho vyrazu je nulova. Preto ak by sme ako kriterium deformacie pouzili vyraz:
∂iuj + ∂jui
pre rotaciu o δϕ okolo ~n dostaneme 0:
∂iuj + ∂jui = δϕ
=0︷ ︸︸ ︷(εijk + εjik)nk = 0
Dostali sme sa tak k vyrazu, ktory by mohol byt’ vhodnym kriteriom deformacie kontinua a nazvemeho tenzor deformacie:
εij =1
2(∂iuj + ∂jui) (4.128)
Jeho statut dobreho kriteria deformacie este stojı na vratkych nohach - vieme, ze je nulovy pri akomkol’vekposunutı a akejkol’vek rotacii, no nevieme, ci nahodou nie je nulovy aj pri nejakej skutocnej deformacii. Nato skumajme kontinuum pred a po deformacii - majme dva body, bod ~r a druhy, ktory je od neho vzdialenyo ~δ, teda jeho poloha bude ~r + ~δ. Po deformacii sa tieto dva body dostanu do novej polohy a ich vzajomnapoloha bude ~∆:
r
r + δ δ →
→→→
r + u(r)
r + δ + u(r + δ)
→
→→→
→ →
→→Δ
→
Obrazok 4.10: Stav dvoch bodov pred a po deformacii.
156

4.3. PRUZNE KONTINUUM
Pre ~∆ platı:
~∆ = ~r + ~δ + ~u(~r + ~δ
)−(~r + ~u (~r )
)Vieme, ze k deformacii dochadza prave vtedy, ak
∣∣∣~∆∣∣∣ 6= ∣∣∣~δ ∣∣∣. Mali by sme preto vyjadrit’∣∣∣~∆∣∣∣, no to je
obtiazne, jednoduchsie bude vyjadrit’ ∆2:
∆2 = ∆i∆i =[δi + ui
(~r + ~δ
)− ui (~r )
] [δi + ui
(~r + ~δ
)− ui (~r )
]Vyraz ui
(~r + ~δ
)rozlozıme do Taylorovho radu do prveho radu a budeme predpokladat’, ze ~δ je male:
ui
(~r + ~δ
)= ui (~r ) + δj
∂ui∂xj
∆2 =
[δi + δj
∂ui∂xj
] [δi + δk
∂ui∂xk
]24
Pri roznasobovanı tohto vyrazu budeme navyse predpokladat’, ze vyraz ∂ui∂xj
je maly, teda sucin takychto
dvoch vyrazov da oproti zvysku zanedbatel’nu nulu:
∆2 = δ2 + δiδk∂ui∂xk
+ δiδj∂ui∂xj
+ δjδk∂ui∂xj
∂ui∂xk︸ ︷︷ ︸
male
= δ2 + δiδj
(∂ui∂xj
+∂uj∂xi
)︸ ︷︷ ︸
=2εij
∆2 = δ2 + 2δiδjεij
Vidıme, ze jednoznacne platı:
∆2 6= δ2 ⇔ εij 6= 0
co je presne to, co ma εij splnat’. Po ceste sme pouzili, ze ∂iuj je maly vyraz. Ak k tomu navyse platı, zeaj ui je maly vyraz, jedna sa o linearnu pruznost’.
4.3.2 Hookov zakon
Vieme teda, comu je rovny tenzor deformacie:
εij =1
2(∂iuj + ∂jui)
Vo vseobecnej rovnici kontinua vsak vystupuje tenzor napatia, σij . Este nevieme, ako spolu suvisiatenzor napatia a tenzor deformacie, no da sa predpokladat’ nasledujuca zavislost’:
σij (εkl, ~r, t)
My vsak vieme, ze εkl je maly vyraz (dovodom je malost’ vyrazu ∂kul), rozvinme teda σij do Tayolorvhoradu v okolı εkl = 0:
σij (εkl, ~r, t) =
=0︷ ︸︸ ︷σij (0, ~r, t) +
=Cijkl︷ ︸︸ ︷∂σij∂εkl
∣∣∣∣ε=0
εkl + O(|ε|2)
24Aby nekolidovali indexy, v druhej zatvorke sme index j premenovali na k.
157

4.3. PRUZNE KONTINUUM
Vyraz σij (0, ~r, t) je nulovy, pretoze pri nulovom tenzore deformacie sa nekona deformacia a teda ajplosne sily budu nulove. Druhy vyraz je sucin Cijklεkl, my uz vieme, ze Cijkl nezavisı od εkl, pretoze vderivacii sme zvolili ε = 0, teda Cijkl zavisı len od ~r a t. Zvysok radu sme kvoli malosti (a linearite) εzanedbali. Dostavame tak vzt’ah:
σij = Cijklεkl (4.129)
To, co sme prave odvodili, sa nazyva Hookov zakon25. Tento vzt’ah je linearny, pretoze zachovavalinearne kombinacie - sprostredkovatel’om tejto zavislosti je tenzor stvrteho radu, Cijkl, ktory budeme nazyvat’
tenzor elastickych koeficientov26. Napriek linearnosti vzt’ahu medzi tenzorom napatia a tenzorom deformacie,je trochu desive, ze tenzor, ktory tento vzt’ah sprostredkuva, teda tenzor elastickych koeficientov, je tenzorstvrteho radu, teda na kompletne urcenie spravania sa pruzneho kontinua s najvseobecnejsou anizotropiouby malo byt’ potrebnych 81 elastickych koeficientov, co je naozaj vel’a. Ukazeme si, ze vd’aka symetriamtenzorov napatia a deformacie je mozne tento pocet znacne zredukovat’. Dve symetrie vidno priamo:
∂σij∂εkl
∣∣∣∣ε=0
=∂σji∂εkl
∣∣∣∣ε=0
=⇒ Cijkl = Cjikl (4.130)
∂σij∂εkl
∣∣∣∣ε=0
=∂σij∂εlk
∣∣∣∣ε=0
=⇒ Cijkl = Cijlk (4.131)
Tretia symetria je trochu skryta a bez dokazu27 uvedieme, ze:
Cijkl = Cklij (4.132)
Prve dve symetrie (tiez volane vedl’ajsie symetrie) su sposobene symetriami tenzorov napatia a de-formacie a redukuju pocet neznamych koeficientov Cijkl postupne z 81 na 54 a z 54 na 36. Tretia symetria(hlavna) je sposobena istou zalezitost’ou, ktoru nebudeme hlbsie pitvat’, no s radost’ou konstatujeme, ze tatosymetria redukuje pocet neznamych koeficientov z 36 na 21. Je tomu tak preto, lebo tenzor Cijkl mozemeefektıvne kvoli hlavnej symetrii pısat’ ako CAB , kde A a B bezı od 1 do 9, pretoze samotne tenzory napatiaa deformacie su matice 3x3. Dalej tieto tenzory su symetricke, teda A a B efektıvne bezia od 1 do 6. LenzeCAB = CBA, teda tato akoby matica 6x6 je symetricka, co z 36 nezavislych koeficientov nechava len 21nezavislych koeficientov28.
Zistili sme, ze pre uplne najvseobecnejsie anizotropne a nehomogenne prostredie treba 21 nezavislychkoeficientov, ktore sa menia v priestore (nehomogenita). To je este stale celkom dost’, ale co cakat’, rec jeo najskaredsom moznom kontinuu. Namiesto plakania si uvedomıme, ze svet sa miestami sklada aj z kusovtoho najkrajsieho kontinua - izotropneho a homogenneho, ktory potrebuje len dve konstanty na kompletneurcenie spravania sa tohto kontinua, prave take kontinuum ideme skumat’.
25Robert Hooke.26Citatel’ mozno zacına mat’ zmatok v tenzoroch. Hlavny tenzor, ktory sa vyskytuje vo vseobecnej pohybovej rovnici kontinua
sa nazyva tenzor napatia (stress tensor) a znacı sa σij . Specialne pre pruzne kontinuum sme museli zaviest’ d’alsı tenzor, ktorysa nazyva tenzor deformacie (strain tensor) a znacıme ho εij . Nakoniec tretı tenzor, tenzor elastickych koeficientov (stiffnesstensor) Cijkl sprostredkuva linearny vzt’ah medzi tenzorom napatia a tenzorom deformacie σij = Cijklεkl.
27Mimochodom, tento fakt sa nahliada z toho, ze pre funkciu hustoty energie napatia U platı:
σij =∂U
∂εij
z coho vsak vyplyva:
Cijkl =∂2U
∂εij∂σkl
Dotycna skryta symetria tenzoru elastickych koeficientov je teraz zjavna z rovnosti druhych zmiesanych derivacii pri zameneporadia derivovania (predpokladom je spojitost’ tychto druhych derivacii).
286∑i=1
i = 21
158

4.3. PRUZNE KONTINUUM
4.3.3 Hookov zakon pre homogenne a izotropne kontinuum
Ak by tenzory napatia a deformacie neboli tenzory, ale len vektory, v izotropnom kontinuu by platiloσi = Cδijεj = Cεi, teda vektor ε by mieril v smere σ (v izotropnom kontinuu nema dovod uprednostnit’
niektory smer, vsetky su rovnocenne a teda pri zadanom smere σ uz len z tohto smeru a izotropie prostrediainy smer neposklada, ako smer σ).
Pre vzt’ah medzi σij a εij bude platit’, ze tenzor, ktory ich sprostredkuva, je izotropny - inak povedane,jeho komponenty su rovnake vo vsetkych vzt’aznych systemoch, ktore su voci sebe len otocene. Vo vseobecnosti,pre dane n 6= 1 moze existovat’ niekol’ko jedinecnych tenzorov n-teho radu, pre tenzory radu 1 (t.j. vektory)takyto tenzor (vektor) neexistuje. Jedinecny tenzor druheho radu, ktory je izotropny, je tenzor δij , jedinecnyizotropny tenzor radu tri je Levi-Civitov symbol εijk.
Existuje niekol’ko (tri) jedinecnych tenzorov radu styri, ktore su izotropne, no nemusıme ich poznat’,pretoze platı jedna vel’mi uzitocna veta (bez mena): vseobecny izotropny tenzor mozno vyskladat’ jedine zKroneckerovych delt a Levi-Civitovych symbolov. Izotropny tenzor radu styri sa teda ale musı skladat’ jedinez Kroneckerovych delt, pretoze Levi-Civitov symbol tam jednoducho nenatlacıme29:
Cijkl = a δijδkl + b δikδjl + c δilδjk (4.133)
Vd’aka (4.130), (4.131) a (4.132) mame:
Cijkl = Cjikl =⇒ a δijδkl + b δikδjl + c δilδjk = a δjiδkl + b δjkδil + c δjlδik =⇒ b = c
Cijkl = Cijlk =⇒ a δijδkl + b δikδjl + c δilδjk = a δijδlk + b δilδjk + c δikδjl =⇒ b = c
Cijkl = Cklij =⇒ a δijδkl + b δikδjl + c δilδjk = a δklδij + b δkiδlj + c δkjδli =⇒ nic
Vidıme, ze prve dve symetrie priniesli novu informaciu, b = c, tretia symetria nepriniesla nic. Platıteda:
Cijkl = a δijδkl + b(δikδjl + δilδjk
)Teda naozaj vidıme, ze pre izotropne a homogenne kontinuum stacia dve konstanty (pre nehomogenne
dve funkcie), a a b, ktore odteraz budeme znacit’ λ a µ a volat’ Lameho elasticke koeficienty. Pre tenzornapatia teda platı:
σij = Cijklεkl = λ δij δklεkl︸ ︷︷ ︸=εkk
+µ(δikδjl + δilδjk
)εkl = λ δijεkk + µ (εij + εji)︸ ︷︷ ︸
=2εij
Vidıme, ze sa nam vo vzt’ahu objavil vyraz pre stopu matice εij :
Trε = δklεkl = εkk = ~∇ · ~u ≡ ϑ (4.134)
Tuto konstantu ϑ budeme volat’ objemova dilatacia. Dostali sme Hookov zakon pre homogenne aizotropne prostredie:
σij = λϑ δij + 2µ εij (4.135)
29Niekto by sa mohol snazit’ vyrabat’ kombinacie sucinu Levi-Civitovho symbolu s Kroneckerovou deltou, no take cosi byvzdy viedlo na nulovy vyraz a sucin dvoch Levi-Civitovych symbolov je len nieco co uz mame zastupene - napr. εijmεklm sada pomocou Davis-Cup identity vyjadrit’ pomocou Kroneckerovych delt.
159

4.3. PRUZNE KONTINUUM
4.3.4 Objemova dilatacia
Majme nejaky objem dV , ktory sa vplyvom deformacie zdeformuje na objem dV ′:
dV dV'→
Obrazok 4.11: Zmena objemu po deformacii.
Platı dV = dx dy dz. Vplyvom deformacie sa zmenı suradnicovy system:
~r ′ = ~r + ~u (~r ) (4.136)
x′i = xi + ui (~r ) (4.137)
Vieme, ze novy objem vypocıtame ako:
dV ′ = |J |dV (4.138)
kde J je jakobian transformacie:
Jij =∂x′i∂xj
= δij +∂ui∂xj
=
1 + ∂u1
∂x∂u1
∂y∂u3
∂z∂u2
∂x 1 + ∂u2
∂y∂u2
∂z∂u3
∂x∂u3
∂y 1 + ∂u3
∂z
(4.139)
Vieme, ze v determinante sa prvky matice medzi sebou vselijako nasobia, my vsak vieme, ze ∂iuj jemale, z determinantu teda ostane:
|J | = 1 + ~∇ · ~u = 1 + ϑ (4.140)
Pre objemovy element dV ′ tak platı:
dV ′ = |J |dV = (1 + ϑ) dV =⇒ ϑ =dV ′ − dV
dV(4.141)
Vyraz ϑ teda vyjadruje relatıvnu zmenu objemoveho elementu pri deformacii, preto sa nazyva objemovadilatacia.
4.3.5 Homogenne a izotropne pruzne kontinuum, Lameho rovnica
Vychadzame zo vseobecnej pohybovej rovnice kontinua a vzt’ahmi, ktore sme odvodili doteraz:
ρai = ∂jσij + fi σij = λ ~∇ · ~u δij + 2µ εij εij =1
2(∂iuj + ∂jui) (4.142)
Vzhl’adom na malost’ ui je clen ai rovny druhej casovej derivacii pol’a posunutı. Pıseme teda:
ρ∂2ui∂t2
= ∂j
[λ ~∇ · ~u δij + µ (∂iuj + ∂jui)
]+ fi = λ∂i
(~∇ · ~u
)+ µ
[∂i
(~∇ · ~u
)+ ∆ui
]+ fi
ρ∂2~u
∂t2= (λ+ µ) ~∇
(~∇ · ~u
)+ µ∆~u+ ~f (4.143)
Rovnica, ktoru sme prave odvodili, sa nazyva Lameho rovnica. Potesujuca sprava je, ze tato rovnica jelinearna.
160

4.4. VLNY V PRUZNOM KONTINUU A V KVAPALINACH
4.4 Vlny v pruznom kontinuu a v kvapalinach
V tejto casti si vel’mi strucne rozoberieme vlny v pruznom kontinuu a vlny v kvapaline. Nebudeme sazaoberat’ detailami, ako rozdelenie vln na objemove a povrchove, poprıpadne na ich d’alsie delenie, pretozeto nie je ciel’om tohto predmetu30. Zacneme jednoduchsımi vlnami v pruznom kontinuu.
4.4.1 Vlny v izotropnom pruznom kontinuu
Tak, ako aj v predoslych castiach, nebudeme riesit’ Lameho rovnicu (4.143) v jej plnej parade (aj ked’
nas uprimne tesı svojou linearitou), pouzijeme ansatz rovinnej vlny. Zaujıma nas predsa, ci sa v pruznomkontinuu moze sırit’ rovinna, linearne polarizovana vlna a ak ano, za akych predpokladov. Tento ansatzdosadıme v nasledujucom tvare:
~u (~r, t) = ~u0f (~n · ~r, t) ; ~u0 - konst.
Takyto ansatz nazyvame rovinnou vlnou, pretoze ξ = ~n · ~r urcuje rovnicu roviny (teda ~u zavisı od ~r,ale len v nejakej specialnej kombinacii ~n · ~r) a linearne polarizovanou, pretoze ~u0 je konstanta nemeniaca sas casom ani v priestore. Dosad’me tento ansatz do (4.143) bez posobenia objemovych sıl:
ρ∂2~u
∂t2= (λ+ µ) ~∇
(~∇ · ~u
)+ µ∆~u+~0
∂2~u
∂t2= ~u0f
~∇ · ~u = ∂iui = u0i∂if (~n · ~r, t) = u0i∂f (ξ, t)
∂ξ
∂ξ
∂xi= u0if
′ni = ~u0 · ~n f ′[~∇(~∇ · ~u
)]i
= ∂i~u0 · ~n f ′ = ~u0 · ~nni f ′′ =⇒ ~∇(~∇ · ~u
)= ~u0 · ~n f ′′ ~n
∆~u = ~u0f′′ ~n 2︸︷︷︸
=1
ρf~u0 = (λ+ µ) (~u0 · ~n) f ′′~n+ µ f ′′~u0(ρf − µ f ′′
)︸ ︷︷ ︸
=Q1
~u0− (λ+ µ) (~u0 · ~n) f ′′︸ ︷︷ ︸=Q2
~n = 0
Dospeli sme k rovnici typu:
Q1~u0 +Q2~n = 0
V zavislosti na polohe ~u0 a ~n mame dve moznosti. Pokial’ ~u0 ‖ ~n, potom urcite existuje cıslo c take, ze
~u0 = c~n. Ak ~u0‖~k, potom ~u0 a ~n su linearne nezavisle, teda rovnica moze byt’ splnena iba ak Q1 = Q2 = 0.
30Dalsı zaujem treba smerovat’ na oblast’ ako je fyzika Zeme, ku ktorej neodmyslitel’ne patria vlny v kontinuu, poprıpadespecialne studium mechaniky kontinua a hydrodynamiky.
161

4.4. VLNY V PRUZNOM KONTINUU A V KVAPALINACH
1. ~u0 ‖ ~n
Pre tento prıpad platı ~u0 = c~n, teda mozeme pısat’:(ρf − µ f ′′
)c~n− (λ+ µ) c (~n · ~n) f ′′~n = 0[(
ρf − µ f ′′)− (λ+ µ) f ′′
]~n = 0
Q~n = 0
Pre nenulovy vektor ~k je tato rovnica splnena iba ak Q = 0:(ρf − µ f ′′
)− (λ+ µ) f ′′ = 0
f − 2µ+ λ
ρf ′′ = 0
Dostali sme vlnovu rovnicu pre funkciu f . Rychlost’ sırenia vln, ked’ ~u0 ‖ ~n je:
cl =
√2µ+ λ
ρrychlost’ sırenia pozdlznych (longitudinalnych, p) vln
2. ~u0 ‖ ~n
Ak vektor ~u0 je linearne nezavisly od ~n, potom musı platit’:
ρf − µ f ′′ = 0
(λ+ µ) (~u0 · ~n) f ′′ = 0(4.144)
Prva rovnica je znovu vlnova rovnica pre funkciu f , tentoraz s rychlost’ou sırenia:
ct =
õ
ρrychlost’ sırenia priecnych (transverzalnych, s) vln
Tieto vlny sme nazvali priecne, aj ked’ platı len ~u0 ‖ ~n, teda nie nutne ~u0 ⊥ ~n (vtedy by by malo zmyselvolat’ tieto vlny priecne). Ukazeme, ze nutne ~u0 ⊥ ~n. Ak by platilo ~u0⊥ ~n, z druhej rovnice (4.144) vyplyva:
(λ+ µ) (~u0 · ~n) f ′′ = 0 ∧ λ > 0 ∧ µ > 0 ∧ ~u0⊥ ~n =⇒ f ′′ = 0 =⇒ f (~n · ~r, t) = a(t)~n · ~r + b(t) (4.145)
No ak by sme mali taketo riesenie pre f , to by znamenalo, ze pre nenulove a(t) by ~u rastlo nad vsetkymedze - nebolo by uz male. Ak by platilo, ze a(t) = 0, potom by ~u bola konstanta v priestore a nejaka funkciav case, co vsak len znamena, ze by sa cele kontinuum nejako posuvalo v case, to ale nie su vlny (kontinuumsa pri takomto pohybe nedeformuje). Z toho vyplyva, ze nulovost’ druhej rovnice (4.144) je nutne splnit’ tak,ze ~u0 ⊥ ~n.
Zistili sme teda dva druhy riesenı - take, ktorych smer sırenia je rovnobezny so smerom kmitania, tieto
vlny sme nazvali pozdlzne a ich rychlost’ je cl =√
2µ+λρ . Druhy druh vln, priecny, kmita kolmo na smer
sırenia, preto sme tieto vlny nazvali priecne a ich rychlost’ je ct =√
µρ . Vidıme, ze rychlost’ pozdlznych
vln je vacsia ako rychlost’ priecnych vln, preto pozdlzne dostali nazov p vlny, teda primarne a priecne svlny, sekundarne - pri kmitavom pohybe zeme sa z daneho miesta sıria rozne typy vln, no do ineho miesta,vzdialeneho od zdroja, najprv dorazia pozdlzne vlny, az potom priecne, co sa deje vd’aka rozdielnej rychlostisirenia tychto vln.
Vd’aka tomu, ze Lameho rovnica je linearna, vseobecne riesenie vlny mozno zlozit’ ako linearnu kom-binaciu pozdlzneho a priecneho kmitania, ktora bude tiez splnat’ Lameho rovnicu.
162

4.4. VLNY V PRUZNOM KONTINUU A V KVAPALINACH
Pri priecnych vlnach nedochadza ku objemovej dilatacii ϑ = ~∇· ~u = ~n · ~u0f′ = 0, pri pozdlznych vlnach
k nej dochadza (vtedy ~n ‖ ~u0 =⇒ ϑ = ~∇ · ~u = ~n · ~u0f′ 6= 0).
4.4.2 Vlny v idealnej kvapaline
Pre idealnu kvapalinu31 zoberieme Eulerovu rovnicu bez objemovych sıl spolu s rovnicou kontinuity:
∂~v
∂t+(~v · ~∇
)~v = −1
ρ~∇p
∂ρ
∂t+ ~∇ · (ρ~v ) = 0
(4.146)
Rovnako by sme mohli skusit’ dosadit’ ansatz pre rovinnu vlnu, no d’aleko by sme nedosli - aj s ansatzomje riesenie tejto rovnice t’azke. Skusme vsak dosadit’ takyto smiesny konstantny ansatz:
ρ = ρ0
p = p0
~v = ~0
(4.147)
Tento ansatz samozrejme splna obe rovnice (4.146). Teraz vezmime taky ansatz, ktory sa bude nepatrnelısit’ od smiesneho ansatzu, bude to len jeho male vyrusenie:
ρ = ρ0 + ρ
p = p0 + p
~v = ~0 + ~v
(4.148)
teda platı, ze veliciny ρ, p a ~v a ich derivacie podl’a casu a priestorovych suradnıc su male (v zmysle, zeakykol’vek ich vzajomny sucin mozno zanedbat’ oproti tymto velicinam a ostatnym clenom). Z prvej rovnice(4.146) tak dostaneme:
(ρ0 + ρ)∂~v
∂t+ (ρ0 + ρ)
(~v · ~∇
)~v = −~∇p0 − ~∇p
ρ0∂~v
∂t= −~∇p (4.149)
Z rovnice kontinuity dostavame:
∂ (ρ0 + ρ)
∂t+ ~∇ ·
[(ρ0 + ρ) ~v
]= 0
∂ρ
∂t+ ρ0
~∇ · ~v = 0 (4.150)
Tento vysledok zderivujme podl’a casu:
∂2ρ
∂t2+ ρ0
∂
∂t~∇ · ~v = 0
∂2ρ
∂t2+ ~∇ ·
(ρ0∂~v
∂t
)= 0
31Nazov kvapalina je zavadzajuci. Patrı sem naprıklad aj vzduch.
163

4.4. VLNY V PRUZNOM KONTINUU A V KVAPALINACH
Za ρ0∂t~v dosadıme (4.149):
∂2ρ
∂t2+ ~∇ ·
(−~∇p
)= 0
∂2ρ
∂t2−∆p = 0 (4.151)
Toto je takmer vlnova rovnica, problem je, ze miesto rovnakej premennej (bud’ hustota, alebo tlak),je to rovnica pre obe veliciny zmiesane spolu. Predpokladajme teda, ze tlak a hustota zavisia iba na sebenavzajom a uz na nicom inom32. Ked’ze sa vsak obe veliciny menia iba malo, je mozne tlak rozvinut’ v okolıρ0 do prveho radu Taylorovho radu, pricom zanedbanie bude male:
p (ρ) = p (ρ0)︸ ︷︷ ︸=p0
+dp
dρ
∣∣∣∣ρ=ρ0
(ρ− ρ0)︸ ︷︷ ︸=ρ
p = p (ρ)− p0 =dp
dρ
∣∣∣∣ρ=ρ0︸ ︷︷ ︸
=k
ρ = k ρ
p = k ρ (4.152)
Dostali sme priblızenie zavislosti tlaku p od hustoty ρ (resp. maleho vyrusenia tlaku p od malehovyrusenia hustoty ρ). Tuto zavislost’ dosadıme do (4.151):
∂2ρ
∂t2− k∆ρ = 0 (4.153)
Vidıme, ze ρ ma splnat’ vlnovu rovnicu, rychlost’ sırenia bude v tomto prıpade c0 =√k. Pre tlak p platı
rovnaka rovnica:
∂2p
∂t2− k∆p = 0 (4.154)
Rychlost’ sırenia takejto skalarnej tlakovej vlny bude tiez c0 =√k. Z prvej rovnice (4.149) mame:
ρ0∂~v
∂t= −~∇p
Tuto rovnicu zderivujeme podl’a casu:
ρ0∂2~v
∂t2= −~∇
(∂p
∂t
)Pre vyraz ∂tp mame z (4.152) a (4.150):
p = k ρ =⇒ ∂p
∂t= k
∂ρ
∂t= −k ρ0
~∇ · ~v (4.155)
ρ0∂2~v
∂t2= k ρ0
~∇(~∇ · ~v
)∂2~v
∂t2= k ~∇
(~∇ · ~v
)(4.156)
32Ak tlak nezavisı na entropii S, tento prıpad sa nazyva barotropny.
164

4.4. VLNY V PRUZNOM KONTINUU A V KVAPALINACH
My by sme na pravej strane potrebovali ∆~v, co je ~∇ ·(~∇ ~v)
, avsak vidıme tam miesto toho ~∇(~∇ · ~v
).
Prehltneme slzy zufalstva a pocıtajme vyraz dvojitej rotacie rychlostneho pol’a, ~∇×(~∇× ~v
):
[~∇×
(~∇× ~v
)]i
= εijk∂jεkab∂avb = εkijεkab∂j∂avb = (δiaδjb − δibδja) ∂j∂avb = ∂i∂j vj︸ ︷︷ ︸=[~∇(~∇·~v )]
i
− ∂j∂j vi︸ ︷︷ ︸=∆vi
=⇒ ~∇×(~∇× ~v
)= ~∇
(~∇ · ~v
)−∆~v
Lenze vyraz ~∇(~∇ · ~v
)je presne to, co sa nachadza v rovnici (4.156), a chyba v nej ∆~v, co je ten vyraz,
ktory by sme v nej potrebovali:
~∇(~∇ · ~v
)= ∆~v + ~∇×
(~∇× ~v
)Tento vyraz dosadıme do (4.156):
∂2~v
∂t2= k ~∇
(~∇ · ~v
)∂2~v
∂t2= k∆~v + k ~∇×
(~∇× ~v
)∂2~v
∂t2− k∆~v︸ ︷︷ ︸
vlny?
= k ~∇×(~∇× ~v
)
Vidıme, ze l’ava strana je vlastne vlnova rovnica pre vektorove vlny ~v, no to by platilo, keby bolana pravej strane nula. Lenze miesto toho je tam akasi podivna dvojita rotacia. Ked’ze vsak l’ava stranavyzera vel’mi sl’ubne, skusme na nu ansatz rovinnej linearne polarizovanej vlny a pracujme s rovnicou, kdebol gradient divergencie (prevedenie na tvar s prıtomnym laplacianom bola len motivacia):
~v = ~V0 f (~n · ~r, t)
∂2~v
∂t2= ~V0 f[
~∇(~∇ · ~v
)]i
= ∂i∂j ~V0j f = ∂inj ~V0j f′ = ni nj ~V0jf
′′ =⇒ ~∇(~∇ · ~v
)= ~n · ~V0 f
′′ ~n
~V0 f = k(~n · ~V0
)f ′′ ~n
Q1~V0 = Q2~n (4.157)
Znovu sme rovnicu doviedli do tvaru, ked’ zacına byt’ dolezity vzt’ah medzi ~V0 a ~n, teda smer kmitaniaa smer sırenia sa vln v tekutine. Budeme rozlisovat’ dva prıpady, bud’ ~V0 ‖ ~n, alebo ~V0 ‖ ~n.
165

4.4. VLNY V PRUZNOM KONTINUU A V KVAPALINACH
1. ~V0 ‖ ~n
Pokial’ platı ~V0 ‖ ~n, potom existuje skalar c taky, ze ~V0 = c ~n a rovnica prejde na tvar:
~V0 f = k(~n · ~V0
)f ′′ ~n
c~n f = k c (~n · ~n ) f ′′ ~n(f − k f ′′
)~n = ~0
Ked’ze vsetky zlozky vektora ~n nebudu nikdy naraz nulove (ak ano, nic nekmita), potom musı platit’:
f − k f ′′ = 0
Pre funkciu f tak dostavame standardnu vlnovu rovnicu. Rychlost’ sırenia vlny v tomto prıpade jetotozny s rychlost’ou sırenia vln v prıpade hustoty a tlaku, teda c0 =
√k.
2. ~V0 ‖ ~n
Pokial’ nie su vektory ~V0 a ~n rovnobezne, potom su nutne linearne nezavisle, co znamena:
f = 0
k(~n · ~V0
)f ′′ = 0
Druhu rovnicu mozeme splnit’ jednoducho, ak ~V0 ⊥ ~n, no prva rovnica vlastne hovorı:
f = a (~r ) t+ b (~r )
Ak by platilo, ze a 6= 0, potom by uz ~v nebolo male vyrusenie rychlostneho pol’a, pretoze f by rastlo scasom nad vsetky medze. Ak vsak a = 0, potom f , a teda ani ~v nezavisı od casu, co ale znacı stacionarnytok. Stacionarny tok vsak neznamena ziadne vlnenie a preto je tento prıpad nevyhovujuci. Z toho plyniezaver, ze v idealnej kvapaline sa pri prıslusnych zanedbaniach nesıria priecne rovinne vlny.
Dospeli sme teda k zaveru, ze v kvapaline sa pri istych zanedbaniach sıria rovinne, no iba pozdlzne vlny,pricom sa vlnı tlak, hustota aj rychlostne pole s rovnakou rychlost’ou c0 =
√k. Tuto rychlost’ nepozname,
no vieme, ze:
k =dp
dρ
∣∣∣∣ρ=ρ0
Vychadzajme teda zo stavovej rovnice idealneho plynu, ktora obsahuje obe tieto veliciny (tlak aj hus-totu):
pV = NkT V =m
ρ=⇒ p
ρ=NkT
m(4.158)
Z tohto tvaru sa mozeme pokusit’ vyuzit’ tri deje idealneho plynu - izochoricky, izobaricky a izotermicky.Pre fixnu jednotkovu hmotnost’ m = ρ V nema zmysel izochoricky dej, pretoze potom ρ = konst. a to nie jenieco, co by sme vedeli vyuzit’. Podobne izobaricky dej predpoklada p = konst., za tohto predpokladu byvsak bola rychlost’ sırenia vln v tekutinach nulova (a to nie je pravda). Ostava teda izotermicky dej, prektory pıseme:
pV = konst. =⇒ p
ρ= konst.
p
ρ=p0
ρ0=⇒ p = p0
ρ
ρ0=⇒ k =
dp
dρ
∣∣∣∣ρ=ρ0
=p0
ρ0=⇒ cizoterm =
√p0
ρ0(4.159)
166

4.4. VLNY V PRUZNOM KONTINUU A V KVAPALINACH
Inou alternatıvou je adiabaticky dej, pre ktory platı:
pV κ = konst. =⇒ p
ρκ= konst.
p
ρκ=p0
ρκ0=⇒ p = p0
ρκ
ρκ0=⇒ k =
dp
dρ
∣∣∣∣ρ=ρ0
= κp0
ρ0=⇒ cadiabat =
√κ
√p0
ρ0=√κ cizoterm (4.160)
Mozeme porovnat’ cizoterm a cadiabat pre vzduch, kde p0 = 101 325Pa, ρ0 = 1.2 kgm−3 a κ = 1.4:
cizoterm = 290.6ms−1 izotermicky model
cadiabat = 343.8ms−1 adiabaticky model(4.161)
Experiment vie ukazat’, ktora z rychlostı je blizsie k pravde - vieme merat’ rychlost’ zvuku vo vzduchua ukazuje sa, ze hodnota 343.8ms−1 je spravna, teda taketo vlnenie je adiabaticke.
167


![Univerzita Komensk eho v Bratislave Fakulta matematiky ... · Mako Igor: Ekonofyzik alne modelovanie nan cnyc h trhov [Diplomov a pr aca]. Univerzita Komensk eho v Bratislave; Fakulta](https://img.pdfslide.tips/doc/110x75/5f7f7daf225e6823c6223190/univerzita-komensk-eho-v-bratislave-fakulta-matematiky-mako-igor-ekonofyzik.jpg)





![skrátenáverziaprepotrebyštudentov “Počítačovéhomodelovania ...davinci.fmph.uniba.sk/~markos3/prednasky/lokalizacia-p3a.pdfAndersonovmodel H= W X n " n c yc n +V X [nn0] cyc](https://img.pdfslide.tips/doc/110x75/5e19969d1884f564345e6ef6/skrtenverziaprepotrebytudentov-aoepotaovhomodelovania-markos3prednaskylokalizacia-p3apdfandersonovmodel.jpg)










