Embed Size (px)
Citation preview

1
Máster universitario en investigación en tecnologías y procesos avanzados en la industria
ILUMINACIÓN Y PROCESAMIENTO DE IMAGEN EN LA INDUSTRIA
VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
Dr. Francesco Bianconi
Università degli Studi di Perugia (Italia)
11 de enero de 2011 (16:00)
Aula de grado
PRIMERA PARTE: RECONOCIMIENTO DE PATRONES

2
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
RECONOCIMIENTO DE PATRONES: SUMARIO
Aplicaciones
Introducción
Conceptos básicos
Etapas del proceso
Tipos de clasificación
Clasificación no supervisada
Clasificación supervisada
Clasificadores paramétricos
Clasificadores no paramétricos
Evaluación de la bondad de un clasificador
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
¿QUÉ ES EL RECONOCIMIENTO DE PATRONES?
Existen diversas definiciones:
Asignar un objeto a una categoría (clase) predefinidaR. O. Duda
Dividir un espacio multidimensional en clasesK. Fukunaga
Tomar decisiones a partir de ejemplosB. D. Ripley

3
APLICACIONES (1)
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
IDENTIFICACIÓN BIOMÉTRICA
Reconocimiento de iris y huellas digitales
APLICACIONES (2)
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
DIAGNÓSTICO ASISTIDO POR COMPUTADOR
Detección de masas y calcificaciones en mamografías

4
APLICACIONES (3)
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
INSPECCIÓN INDUSTRIAL
Detección de nudos y grietas en tableros de madera
EJEMPLO ILUSTRATIVO
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Separación automática de manzanas verdes y rojas en una planta de envasado de fruta

5
ETAPAS
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Adquisición
Procesamiento previo
Extracción de características
Clasificación
Manzana verde
Manzana roja
ADQUISICIÓN
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Sistema de iluminación
Cámara
Óptica
Frame grabber

6
PROCESAMIENTO PREVIO
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Ecualización
Segmentación (separar las manzanas del fondo)
Solapamientos
EXTRACCIÓN DE CARACTERÍSTICAS
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Atributos descriptivos
Poder de discriminación
Dimensión del espacio de características

7
CLASIFICACIÓN
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Ejemplos (training samples)
Error de generalización
Coste, riesgo
TIPOS DE CLASIFICACIÓN
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
NO SUPERVISADA (CLUSTERING)
INPUT
Patrones a clasificar
Número de clases
OUTPUT
Grupos de patrones
SUPERVISADA
INPUT
Patrones de clase conocida (ejemplos o training set)
Patrones a clasificar
OUTPUT
Clases (etiquetas) de los patrones a clasificar
?

8
CLASIFICACIÓN NO SUPERVISADA
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
dos clases tres clases
Consiste en dividir un conjunto de manzanas en grupos.
ALGORITMO K–MEANS
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Divide n patrones en k clases
Cada patrón se asocia al centroide más cercano

9
CLASIFICACIÓN SUPERVISADA
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Consiste en determinar el tipo de una manzana a partir de un
aprendizaje basado en ejemplos de los diferentes tipos de manzana
Ejemplos de
manzanas verdes
Ejemplos de
manzanas rojas
APRENDIZAJE
¿ ?
ROJA
RECONOCIMIENTO
¿DE QUÉ CLASE ES ESTA MANZANA?
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
HIPÓTESIS: Las manzanas verdes y las rojas son equiprobables
CARACTERÍSTICAS: x = nivel medio del canal R de la imagen

10
0 50 100 150 200 250
0
2
4
6
8
10
12
14x 10
-3
DENSIDADES CONDICIONALES DE CLASE (APRENDIZAJE)
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
p (x |roja)p (x |verde)
x
EXTRACCIÓN DE CARACTERÍSTICAS
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
3.120== Rx
Imagen RGB
Canal R Canal G Canal B

11
0 50 100 150 200 250
0
2
4
6
8
10
12
14x 10
-3
PROBABILIDADES A POSTERIORI
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
120.3
11.7
3.4
x
ASIGNACIÓN DE CLASE (RECONOCIMIENTO)
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
VERDE

12
TEORÍA DE LA DECISIÓN BAYESIANA
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
p (x |ωj): probabilidad condicional de que el vector de características tome el valor x si el patrón es de clase ωj
P (ωj): probabilidad a priori de la clase ωj
P (ωj | x): probabilidad a posteriori de que el patrón sea de clase ωj si el vector de características toma el valor x
( ) ( )( )∑
=
= N
iii
jjj
Pp
pPP
1
)|(
)|(|
ωω
ωωω
x
xx
N es el número de clases
REGLA DE DECISIÓN DE BAYES
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Es la formalización estadística de la regla del sentido común
A cada patrón se le asigna la clase que tenga la máxima probabilidad a posteriori
{ }( )xj
NjwP
,...,1maxarg
∈=ω

13
PARTICULARIZACIÓN
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
( ) 2252.0107.115.0104.35.0
104.35.03.120
44
4
1 =××+××
××= −−
−
ωP
Nivel medio del canal R � x
Clase manzana roja � ω1
Clase manzana verde � ω2
p (120.3|ωωωω1) = 3.4×10-4
p (120.3|ωωωω2) = 11.7×10-4
P(ωωωω1) = P (ωωωω2) = 0.5
( ) 7748.0107.115.0104.35.0
107.115.03.120
44
4
2 =××+××
××= −−
−
ωP
TIPOS DE CLASIFICADORES
PARAMÉTRICOS
La distribución de probabilidad tiene una forma funcional determinada (que depende de unos parámetros)
Estimación de parámetros para que la distribución se ajuste a los datos disponibles (training)
Ejemplos:
Clasificador bayesiano
Clasificador Naïve Bayes
NO PARAMÉTRICOS
No es necesario estimar la distribución de probabilidad
Basados en distancia
Ejemplos:
k–nn
1–nn
Mínima distancia
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES

14
CLASIFICADOR BAYESIANO
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Basado en la regla de decisión de Bayes
HIPÓTESIS: Las densidades condicionales de clase tienen una distribución gaussiana multidimensional:
Hay que estimar el vector de medias µµµµj y la matriz de covarianza ΣΣΣΣj para cada clase
( ) ( )jjj Np Σµx ,~|ω
CLASIFICADOR NAÏVE BAYES
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Resulta difícil estimar los parámetros de un clasificador bayesiano
Hipótesis simplificadora: las componentes del vector de características son independientes:
La asignación de clase se basa en la regla del producto:
( ) ( )jjj Nxp σµω ,~|
{ }( )
= ∏=∈
M
iij
NjxPw
1,...,1|maxarg ω
M es la dimensión del espacio de características

15
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Golden deliciousStarking Granny Smith
COMPLIQUEMOS NUESTRO EJEMPLO ILUSTRATIVO…
¿DE QUÉ CLASE ES ESTA MANZANA?
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
CARACTERÍSTICAS: x =(x1, x2): nivel medio de los canales R y G
INFORMACIÓN DISPONIBLE:
No se conocen las densidades condicionales de clase ⇒ clasificación no paramétrica
Se da un conjunto de ejemplos de clase conocida

16
EJEMPLOS DE APRENDIZAJE (O ENTRENAMIENTO)
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
x2
x1
Golden delicious
Starking
Granny Smith
EXTRACCIÓN DE CARACTERÍSTICAS
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
?
x2
x1

17
CLASIFICADOR k–nn
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Es uno de los clasificadores más utilizados por su sencillez de implantación
Se traza una hiperesfera cuyo centro es el patrón a clasificar, y de un radio tal que abarque los k vecinos más cercanos (nearestneighbours)
Se asigna la clase más representada dentro de esos k ejemplos
k = 9
3 5 1 ?
CLASIFICADOR k–nn
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
?
x2
x1

18
CLASIFICADOR 1–nn
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Caso particular del clasificador k-nn (k = 1)
Se asigna al patrón que se va a clasificar la clase del vecino más cercano (nearest neighbour)
VENTAJAS:Sencillez de implantación
Rapidez de la clasificación
No necesita parámetros de ajuste
INCONVENIENTES:Sensibilidad a outliers
?
?
CLASIFICADOR 1–nn
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
x2
x1
k = 1

19
DIAGRAMA DE VORONOI
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
El clasificador 1–nn divide un espacio de características bidimensional
en regiones poligonales (teselación de Voronoi)
CLASIFICADOR DE MÍNIMA DISTANCIA
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Se asigna al patrón que se va a clasificar la clase del centroidemás próximo
VENTAJAS:Menos sensible a outliers que el 1–nn
INCONVENIENTES:Si hay mucha dispersión, el centroide es poco significativo

20
?
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
?
x2
x1
CLASIFICADOR DE MÍNIMA DISTANCIA
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Función que cumple las siguientes propiedades:
No negatividad: d(r,s) ≥ 0
Reflexividad: d(r,r) = 0
Identidad de los indiscernibles: d(r,s) = 0 ⇒ r = s
Simetría: d(r,s) = d(s,r)
Desigualdad triangular: d(r,s) + d(s,t) ≥ d(r,t)
DISTANCIA

21
DISTANCIAS ELEMENTALES
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Euclídea (L2): c
Manhattan (L1): a+b
Tchebychev (L∞): max(a,b)
VALORES DE LAS DISTANCIAS ELEMENTALES
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
4323432123
21012
32123
43234
Euclídea
22222
21112
2101221112
22222
21
21012
1
2
Manhattan Tchebychev
2222
22222222
2222
5555
5555
5555
5555
5555
5555
5555
55558888 8888
8888 8888

22
TASA DE ACIERTO DE UN CLASIFICADOR
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
APRENDIZAJE: Se define un clasificador a partir de unos ejemplos de clase conocida (training set)
RECONOCIMIENTO: Se clasifican nv patrones de clase desconocida (test set o validation set), a nc de los cuales se les asigna la clase correcta
Tasa de acierto estimada:
v
c
n
nt =
PATRONES DE APRENDIZAJE (DE CLASE CONOCIDA)
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
x2
x1
12 + 8 + 10 = 30

23
SPLIT–SAMPLE
División aleatoria en training set y validation set
La partición puede hacerse de dos formas:Stratified sampling
Garantizando que la proporción de ejemplos de cada clase en el training set y en el validation set es la misma que en el conjunto de patrones
Full sampling
Sin garantizar dichas proporciones
Cuando el training set y el validation set están formados por el mismo número de patrones, se denomina split–half validation
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
?
?
?
??
?
?
??
?
?
?
?
?
??
?
?
?
?
?
?
?
?
?
?
?
?
?
?
SPLIT–SAMPLE
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Stratified sampling (split-half) Full samplingx2
x1
x2
x1
1/2 1/2 1/2 2/5 1/2 5/12

24
LEAVE–ONE–OUT CROSS VALIDATION
El training set está formado por todos los patrones menos uno, que será el validation set
El proceso se repite un número de veces igual al número de patrones
Es un método determinista: siempre se obtiene la misma estimación del error de generalización
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
?
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
x2
x1
LEAVE–ONE–OUT CROSS VALIDATION
?
x2
x1
?x2
x1
?
x2
x1
1 21
i 30

25
MATRIZ DE CONFUSIÓN
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Herramienta de visualización en aprendizaje supervisado
Muestra el número de predicciones correctas e incorrectas
FILAS: Clase real
COLUMNAS: Clase asignada por el clasificador
A partir de ella se pueden calcular diferentes índices, como la tasa de acierto
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
100% 0% 0%
3% 75% 22%
7% 12% 81%
Var
ied
ad
Clase asignada
0% 0%
MATRIZ DE CONFUSIÓN

26
OVERFITTING
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Modelo estadístico demasiado complejo
Refleja ruido aleatorio más que una relación subyacente
Bajo poder predictivo
CURSE OF DIMENSIONALITY
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
Incremento exponencial de volumen asociado a la adición de dimensiones
Más características ⇒ más training samples

27
SEGUNDA PARTE: VISIÓN EN COLOR
Iluminación y procesamiento de imagen en la industria: RECONOCIMIENTO DE PATRONES
VISIÓN EN COLOR: SUMARIO
Sistema visual humano
Generación de colores (leyes de Grassmann)
Representación numérica del color
Conceptos básicos
Espacios de color
Independientes del dispositivo
Dependientes del dispositivo
Medición del color
Instrumentos
Sistemas de especificación
Descripción del contenido de color de una imagen

28
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
EL OJO UMANO
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
LA RETINA
La parte sensible del ojo es la retina. Ésta se puede considerar un detector de energía.

29
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
SENSIBILIDAD DEL SISTEMA VISUAL
En la retina hay dos tipos de fotorreceptores: conos y bastones.
Nivel de iluminación escotópico (< 10-3
cd/m2 ): funcionan sólo los bastones
Nivel de iluminación fotópico (> 1 cd/m2 ): los bastones están saturados y funcionan sólo los conos
Nivel de iluminación mesópico: funcionan ambos
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
VISIÓN ESCOTÓPICA
En condiciones escotópicas funcionan sólo los bastones.
Los bastones no son sensibles al color.
Sólo se pueden percibir cambios de intensidad.

30
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
SENSIBILIDAD DE LOS CONOS
En la gráfica se muestra la sensibilidad de los tres tipos de conos. Los picos se localizan en 430 nm, 560 nm y 610 nm.
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
ESTÍMULO VISUAL
¿Cuántos parametros precisamos para describir, de manera unívoca, un estímulo visual aislado?
Visión escotópica
1 parámetro
Visión fotópica
3 parámetros
Visión univariante Visión trivariante

31
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
¿CÓMO VERÍAMOS SI TUVIÉSEMOS SÓLO DOS TIPOS DE CONOS?
Visión trivarianteVisión bivariante
La mayoría de los mamíferos tiene tan sólo dos tipos de conos. Por lo tanto su sistema de visión es bivariante.
Los seres humanos y otros primates tienen visión trivariante. Se supone que la trivarianza puede haber proporcionado una ventaja en el proceso de evolución (e.g.: capacidad de reconocer fruta madura).
No se sabe si existen especies con visión tetravariante.
DALTONISMO (COLOUR BLINDNESS)
Existen varios tipos. Los más frecuentes son:Desplazamiento del pico de sensibilidad de los conos rojos o verdes
Ausencia de conos rojos o verdes
Denominación en función del nivel:Moderado → «−anomalía»
Severo → «−opía»
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR

32
TESTS DE ISHIHARA
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR
Dr. Shinobu Ishihara, Universidad de Tokio (1917)
Sirve para detectar deficiencias en la visión del rojo−verde
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
LEYES DE GRASSMANN
1) Todo color se puede reproducir a través de la mezcla de tres colores (colores primarios), siempre y cuando ninguno de ellos se pueda obtener a partir de los otros dos (principio de la trivarianza visual);
2) el resultado de una mezcla de luces coloreadas no depende de la composición espectral sino sólo de la caracterización psicofísica (metamerismo);
3) si el componente de una mezcla cambia, el color de la mezcla cambia de manera correspondiente

33
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
MEZCLAS ADITIVAS EN EL ÁMBITO ESPACIAL
La mezcla o síntesis aditiva se puede dar en el espacio o en el tiempo.
La mezcla en un medio espacial es un fenómeno muy usual (ejemplo: monitores de ordenador).
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
MEZCLAS ADITIVAS EN EL ÁMBITO TEMPORAL
Además de espacialmente, los colores se pueden fundir en el tiempo.
Este caso se da cuando los estímulos caen sobre los fotoreceptores en momentos distintos pero tan cercanos (al menos 1/50 o 1/60 desegundo), que el sistema visual los percibe como un único color.
34
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
REPRESENTACIÓN NUMÉRICA DEL COLOR
1) Se escoge una terna de colores primarios cuyos espectros sean conocidos;
2) se determina la “cantidad” de cada color primario necesaria a reproducir el color a medir
332211 CkCkCkC ++=
Siendo:
C el color a medir;
Ci los colores primarios;
ki las cantidades de cada color primario
Cada color está representado por la terna (k1, k2, k3)
¿Cómo se puede medir el color?
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
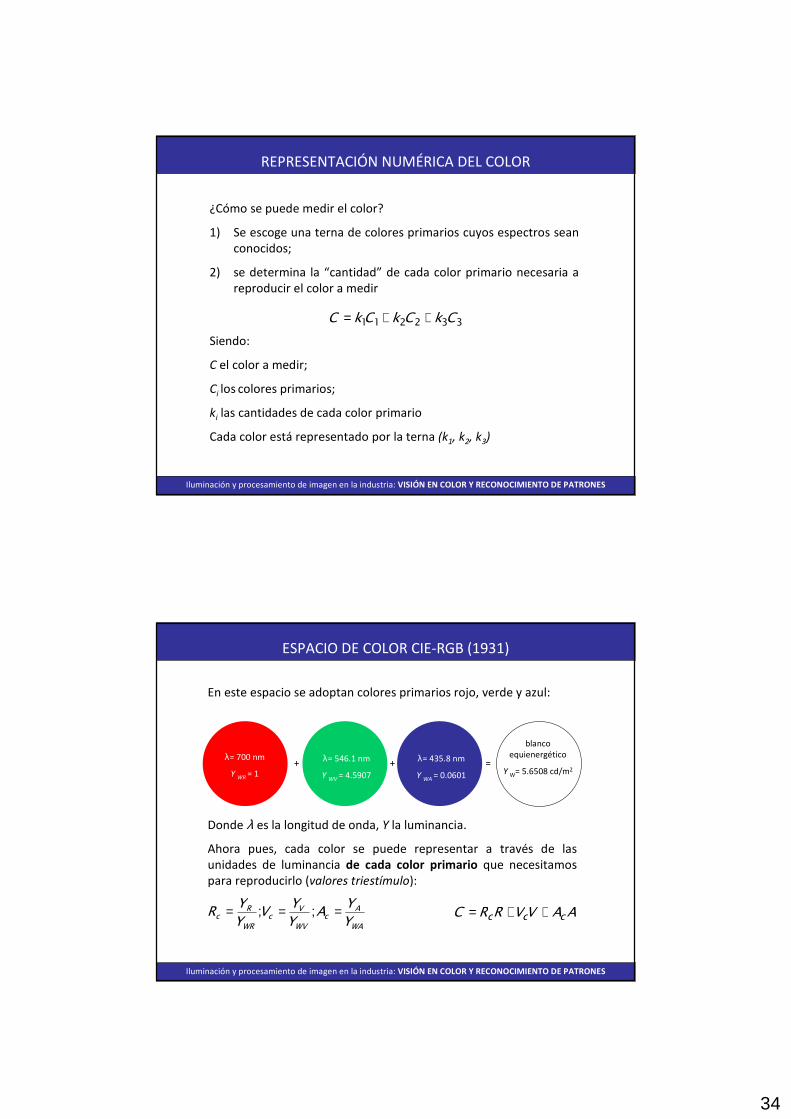
ESPACIO DE COLOR CIE-RGB (1931)
En este espacio se adoptan colores primarios rojo, verde y azul:
λ= 700 nm
Y WR = 1
λ= 546.1 nm
Y WV = 4.5907
λ= 435.8 nm
Y WA = 0.0601
Donde λ es la longitud de onda, Y la luminancia.
Ahora pues, cada color se puede representar a través de las unidades de luminancia de cada color primario que necesitamos para reproducirlo (valores triestímulo):
blanco equienergético
Y W= 5.6508 cd/m2
AAVVRRC ccc ++=WA
Ac
WV
Vc
WR
Rc
Y
YA
Y
YV
Y
YR === ;;
+ + =

35
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
COLOR A PARTIR DEL ESPECTRO
Resultaría trabajoso determinar los valores tricromáticos de un estímulo luminoso a través del proceso de igualación que acabamos de describir.
¿Podemos calcular el color directamente del espectro?
Supongamos que para cada color espectral (longitud de onda λ, energía Eo) se hayan determinado previamente los valores triestímulo rλ, gλ, bλ.
Ahora pues, dado un color espectral de longitud de onda λ, energía Eλ, resultaría:
λλλλλλλλλ rBBgEGrER === ;;
Mientras que para un color genérico tendríamos:
∑∑∑===
===n
iii
n
iii
n
iii bEBgEGrER
111
;; λλλλλλ
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
FUNCIONES DE IGUALACIÓN RGB
En efecto los valores triestímulo de cada color espectral se handeterminado experimentalmente. Al conjunto de estos valores se le denomina funciones de igualación.
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
400 450 500 550 600 650 700
Longitud de onda (nm)
Valor triestímulo
Problema: no todos los colores resultan definidos a través de cantidades positivas.
Funciones de igualación RGB

36
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
FUNCIONES DE IGUALACIÓN XYZ
Las funciones de igualación XYZ han sido determinadas de manera que cada color se puede representar por tres valores triestímulopositivos.
Funciones de igualación XYZ
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
ESPACIO DE COLOR CIE XYZ
Las funciones de igualación que acabamos de ver definen el espacio CIE-XYZ, en que cada color se representa a través de las coordenadas X, Y, Z.
Diagrama de cromaticidad xy
yxzZYX
Yy
ZYX
Xx
−−=++
=++
=
1
Si normalizamos los valores:
Cada color se puede ahora representar mediante un punto en un plano (diagrama de cromaticidad)

37
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
ESPACIO DE COLOR CIE Luv
El espacio CIE-XYZ no es perceptualmente uniforme, es decir: diferencias iguales (percibidas) entre colores no corresponden adistancias iguales en el espacio.
Para obviar este problema se han creado espacios perceptualmente uniformes, como el CIE-Luv y el CIE-Lab
Diagrama de cromaticidad uv
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
ESPACIOS DE COLOR DEPENDIENTES E INDEPENDIENTES DEL DISPOSITIVO
Los espacios de color que acabamos de ver son independientes del dispositivo (espacios colorimétricos). Es decir: los valores triestímulo de un color no dependen del dispositivo con que se han adquirido.
En cambio, en los espacios dependientes del dispositivo los valores triestímulo de un color dependen del dispositivo con que se han adquirido.
Espacios independientes del dispositivo
•CIE-RGB
•CIE_XYZ
•CIE-Luv
•CIE-Lab
•...
Espacios dependientes del dispositivo
•RGB
•HSV
•YIQ
•...

38
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
ESPACIO RGB
Cada color se representa a través de la intensidad del rojo, delverde y el azul.
Es el espacio más utilizado en dispositivos comerciales (cámarasdigitales). Es un espacio perceptualmente no uniforme.
Dichos valores son la respuesta en los canales R, G y B proporcionada por el dispositivo de adquisición, que depende de su sensibilidad espectral (por lo tanto los valores dependen del dispositivo utilizado).
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
ESPACIO HSV
Se obtiene a partir del espacio RGB por medio de una transformación.
H = hue (tonalidad). Se representa como un ángulo. A cada valor corresponde una tonalidad de color (verde, rojo, etc.)
S = saturation (saturación). Indica la “pureza” del color. Cuanto menos sea la saturación, más decoloreado el color.
V = value (intensidad). Indica la posición del color en el eje blanco-negro.
El HSV es un espacio aproximadamente uniforme.

39
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
¿QUÉ ES EL COLOR DE UN MATERIAL?
Ahora preguntémonos lo sigiuente: ¿Qué es el color de un material?
El color no es un característica de un material, sino de un estímulo luminoso.
Cuando hablamos de “color” de un material por lo tanto nos referimos al estímulo de color que genera un material bajo ciertas condiciones de iluminación.
Fuente de luz Receptor
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
ILUMINANTES ESTÁNDARES
No tiene sentido por lo tanto decir: este material tiene un color (Xc, Yc, Zc) en el espacio CIE-XYZ. Sólo podemos decir: este material tiene un color (Xc, Yc, Zc) en el espacio CIE-XYZ bajo un iluminante de cierto tipo.
Iluminante E. Equienergético. Iluminante A. Simula la luz de una bombilla.
Iluminante D50. Simula la luz de un día despejado.
Iluminante D65. Simula la luz de un día nublado.

40
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
¿CÓMO SE MIDE EL COLOR DE UN MATERIAL?
Necesitamos un colorímetro o un espectrofotómetro. Se trata de instrumentos que tienen iluminación propia (iluminantes estándares) y que analizan la luz reflejada por el material.
Estos instrumentos proporcionan una respuesta en un espacio independiente del dispositivo.
ColorímetroColorímetro / espectrofotómetro
SISTEMAS DE ESPECIFICACIÓN: NCS
Desarrollado por el Instituto Escandinavo del Color
Es el sistema normalizado adoptado en España
Se basa en 6 colores primarios y en la teoría de los colores oponentes
Notación: blackness + chromaticity + percentage
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR
www.ncscolour.com

41
SISTEMAS DE ESPECIFICACIÓN : PANTONE
Desarrollado por Pantone Inc.
Se usa en:Artes gráficas
Pinturas
Tejidos
Plásticos
Guía Pantone: colección de muestras de color numeradas
Fórmulas basadas en 13 pigmentos (más el blanco y el negro)
Permite igualaciones de color a distancia
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR
www.pantone.com
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
¿QUÉ INFORMACIONES PODEMOS SACAR CON UNA CÁMARA DIGITAL?
Una cámara digital proporciona informaciones en un espacio dependiente del dispositivo (típicamente RGB).
Estos instrumentos proporcionan una respuesta en un espacio dependiente del dispositivo. Al cambiar instrumento cambia la respuesta.
Para obtener resultados independientes del dispositivo se debe hacer una calibración colorimétrica.
Material
Cámara A
RA,GA,BA
Cámara B
RB,GB,BB

42
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
DESCRIPCIÓN DEL CONTENIDO DE COLOR DE UNA IMAGEN
Cualquiera que sea el espacio de color utilizado, a la hora de caracterizar la apariencia visual, precisamos un conjunto de parámetros que describa el contenido de color de una imagen.
Histogramas
3D
Marginales
Descriptores estadísticos
µ Y σ
Percentiles
Momentos
“Soft colour descriptors”
Descriptores basados en el
color
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
HISTOGRAMA DE COLOR
1. Se divide el espacio de color en un determinado numero de celdas (cuantización);
2. se estima la distribución de probabilidad del color en cada celda
Imagen en colores Histograma de color en el espacio RGB

43
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
HISTOGRAMA MARGINALES
Imagen en colores
Histograma del canal G
Se calcula el histograma separadamente para cada canal. Teoricamente es correcto sólo si los canales son independientes.
Histograma del canal B
Histograma del canal R
Histogramas marginales en el espacio RGB
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
DESCRIPTORES ESTADÍSTICOS: MEDIA Y DESVIACIÓN TÍPICA
Imagen en colores
Son los descriptores estadísticos más sencillos. Se calcula elpromedio y la desviación típica en cada canal.
RR σµ ,
BB σµ ,
GG σµ ,
Ventaja: calculo rápido. Se utilizan en el “grading” on-line de baldosas en cerámica.

44
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
DESCRIPTORES ESTADÍSTICOS: PERCENTILES
El percentil es un valor que divide una distribución en partes de frecuencia asignada. Por ejemplo el percentil del 25 % (p25%) corta la distribución en dos partes tales que el 25 % de la población tiene un valor menor de p25%, mientras que el otro 75 % lo tiene mayor.
Percentiles del canal G
Percentiles del canal B
Percentiles del canal R
Imagen en colores
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
DESCRIPTORES ESTADÍSTICOS: MOMENTOS
Los momentos muestrales centrados se utilizan para describir la población estadística de cada canal de color. El momento muestral centrado de orden k es:
( )∑=
−=n
i
kxik x
nm
1
1 µ
El momento de orden 2 es la varianza.
Para cada canal del espacio de color utilizado se calculan momentos de diferente orden (típicamente de 2 a 5).

45
Iluminación y procesamiento de imagen en la industria: VISIÓN EN COLOR Y RECONOCIMIENTO DE PATRONES
VENTAJAS Y DESVENTAJAS DE LOS MÉTODOS BASADOS EN COLOR
Ventajas
• Invariantes a rotación y a cambio de escala;
• tiempo de cómputo moderado
Desventajas
• Muy sensibles a cambios de iluminación;
• sensibles a cambios de sistemas de adquisición (en el caso de espacios dependientes del dispositivo)