Embed Size (px)
Citation preview

Úvod do stability prenosu elektrickej energie 2012 KEE, FEI, TU v Košiciach Jaroslav Džmura

© Ing. Jaroslav Džmura, PhD.
Úvod do stability prenosu elektrickej energie
Recenzenti: Ing. Marek Hvizdoš, PhD.
Ing. Dušan Medveď, PhD.
Technická univerzita v Košiciach, 2012
Za odbornú náplň tejto učebnice zodpovedá v plnej miere autor. Rukopis neprešiel redakčnou
ani jazykovou úpravou.
ISBN 978-80-553-1184-5

PREDHOVOR
Táto elektronická učebnica je určená predovšetkým pre študentov inžinierskeho štúdia
odboru Elektrotechnika v študijnom programe Elektroenergetika na FEI TU v Košiciach.
Slúži na podporu výučby predmetu Stabilita prenosu elektrickej energie a ako doplnok k
prednáškam a cvičeniam. Úlohou učebnice je oboznámiť študentov s problémami a základmi
stabilného a spoľahlivého prenosu elektrickej energie.
V učebnici sú podané základné teórie k statickej a dynamickej stabilite prenosu
elektrickej energie, ktoré sú potrebné pre výpočty stability sústavy. V každej kapitole je
niekoľko riešených príkladov na bližšie pochopenie danej problematiky.

OBSAH
ZOZNAM OBRÁZKOV .......................................................................................................... 3
1 PROBLEMATIKA STABILITY ELEKTRIZAČNÝCH SÚSTAV ............................ 5
1.1 KLASIFIKÁCIA A NÁZVOSLOVIE STABILITY ELEKTRIZAČNÝCH SÚSTAV ............................ 6 1.2 ELEKTROMECHANICKÉ PRECHODNÉ JAVY ....................................................................... 9
2 STATICKÁ STABILITA ............................................................................................... 11
2.1 ZÁKLADNÉ VZŤAHY PRE URČENIE VÝKONOV PRENOSU ................................................. 17 2.2 VÝKONOVÉ ROVNICE GENERÁTOROV PRI KONŠTANTNOM BUDENÍ ................................ 27
2.2.1 Synchrónny generátor s hladkým rotorom .......................................................... 28 2.2.2 Synchrónny generátor s vyjadrenými pólmi ....................................................... 31
2.3 VPLYV REGULÁCIE BUDENIA NA STATICKÚ STABILITU .................................................. 37
2.4 KRITÉRIÁ STATICKEJ STABILITY .................................................................................... 47
3 DYNAMICKÁ STABILITA .......................................................................................... 49
3.1 DIFERENCIÁLNA ROVNICA KYVU ................................................................................... 50 3.2 STABILITA ZLOŽITEJ SÚSTAVY – NÁHRADNÝ GENERÁTOR ............................................. 51
3.3 DIFERENCIÁLNA ROVNICA KYVU, PREPOČET NA NOVÝ VZŤAŽNÝ VÝKON ...................... 54 3.4 METÓDA PLÔCH PRI URČOVANÍ DYNAMICKEJ STABILITY SÚSTAVY................................ 55
3.5 METÓDA PLÔCH PRI URČOVANÍ DYNAMICKEJ STABILITY SÚSTAVY PRI TROJFÁZOVOM
SKRATE, KRITICKÝ UHOL ............................................................................................... 61 3.6 METÓDA ČÍSELNÉHO INTEGROVANIA (METÓDA POSTUPNÝCH INTERVALOV) ................. 66
4 ZABEZPEČENIE STABILITY ES ............................................................................... 74
4.1 STATICKÁ STABILITA ..................................................................................................... 74
4.2 DYNAMICKÁ STABILITA ................................................................................................. 75 4.2.1 Vplyv premenlivej vzduchovej medzery SG na dynamickú stabilitu ................. 75
4.2.2 Rezistancia v sústave .......................................................................................... 76 4.2.3 Vplyv skratov na dynamickú stabilitu sústavy ................................................... 76 4.2.4 Vplyv činnosti automatiky OZ na dynamickú stabilitu ...................................... 79 4.2.5 Dynamická stabilita v praxi ................................................................................ 80
5 LITERATÚRA ................................................................................................................ 82

ZOZNAM OBRÁZKOV
Obr. 1.1 Klasifikácia stability elektrizačnej sústavy [2] ........................................................... 6 Obr. 1.2 Klasifikácia prechodných javov [2] ............................................................................ 7
Obr. 1.3 Mechanické výkony turbína – generátor [1] ............................................................. 10 Obr. 2.1 Náhradná schéma: generátor – sieť nekonečne veľkého výkonu [1] ........................ 11 Obr. 2.2 Fázorový diagram prenosu činného výkonu ............................................................. 12
Obr. 2.3 Závislosť činného výkonu na záťažovom uhle .................................................. 13 Obr. 2.4 Stabilná a nestabilná oblasť výkonovej charakteristiky prenosu .............................. 14
Obr. 2.5 Prenosová sústava s n-generátormi ........................................................................... 17
Obr. 2.6 Schéma dvojstrojovej sústavy; a) celková schéma; b) fázory napätí a
v komplexnej rovine; c) schéma pri pôsobení generátora G1; d) schéma pri
pôsobení generátora G2; ........................................................................................... 21
Obr. 2.7 Záťažový uhol generátora ..................................................................................... 28
Obr. 2.8 Synchrónny generátor s hladkým rotorom; a) náhradná schéma; b) uloženie
budiaceho vinutia v rotore; c) fázorový diagram s uvažovaním odporu R; d)
fázorový diagram ak sa zanedbá odpor R; ............................................................... 29 Obr. 2.9 Zjednodušený fázorový diagram napätí turboalternátora ......................................... 29
Obr. 2.10 Zjednodušený fázorový diagram napätí turboalternátora ....................................... 30 Obr. 2.11 Fázorový diagram pre generátor s vyjadrenými pólmi ........................................... 31
Obr. 2.12 Závislosť činného výkonu generátora s vyjadrenými pólmi na záťažovom
uhle G ..................................................................................................................... 33
Obr. 2.13 Sústava s reguláciou budenia; a) Jednopólová schéma; b) Náhradná schéma
sústavy; ..................................................................................................................... 38 Obr. 2.14 Fázorový diagram sústavy pri E = konšt. ................................................................ 39
Obr. 2.15 Závislosť fP s reguláciou budenia s ohľadom na potlačenie odchýliek
svorkového napätia. .................................................................................................. 40
Obr. 2.16 Závislosť fP pri zmenách budenia. ............................................................... 40
Obr. 2.17 Vonkajšia výkonová charakteristika generátora s hladkým rotorom. ..................... 41
Obr. 2.18 Vonkajšia výkonová charakteristika generátora s vyjadrenými pólmi. .................. 41 Obr. 3.1 Mechanické výkony turbína - generátor ................................................................... 49
Obr. 3.2 Náhradná schéma; a) Sústava n-generátorov; b) Ekvivalentný náhradný
generátor ................................................................................................................... 52
Obr. 3.3 Metóda plôch skúmania dynamickej stability pri vypnutí jedného z dvoch
vedení ....................................................................................................................... 55 Obr. 3.4 Priebehy výkonov a krivka kyvu pri strate synchronizmu ........................................ 57 Obr. 3.5 Trojfázová prenosová sústava s trojfázovým skratom na vedení V2 ........................ 61 Obr. 3.6 Dynamická stabilita pri trojfázovom skrate; a) Priebehy výkonov pre
jednotlivé stavy prevádzky; b) Krivky kyvu; ........................................................... 61 Obr. 3.7 Kritický uhol pri rovnosti plôch ................................................................................ 62
Obr. 3.8 Metóda číselného integrovania ................................................................................. 67 Obr. 4.1 Sériová (pozdĺžna) kompenzácia vedenia a priečna kompenzácia u odberateľa
pomocou SK ............................................................................................................. 74 Obr. 4.2 Fázorový diagram pri sériovej (a) a paralelnej (b) kompenzácii .............................. 75
Obr. 4.3 Posun uhla δ doprava, 90max ............................................................................. 75
Obr. 4.4 Prenosová sústava so skratom na vedení V2 .............................................................. 76
Obr. 4.5 Náhradná schéma sústavy ......................................................................................... 76 Obr. 4.6 Náhradná schéma a úpravy obvodu pre jednofázový skrat ....................................... 77
Obr. 4.7 Náhradná schéma a úpravy obvodu pre dvojfázový skrat so zemou ........................ 77

Obr. 4.8 Náhradná schéma a úpravy obvodu pre dvojfázový skrat bez zeme ........................ 78
Obr. 4.9 Priebeh činného výkonu pri jednotlivých typoch skratov ......................................... 78 Obr. 4.10 Činnosť úspešného OZ na vedení ........................................................................... 79 Obr. 4.11 Vplyv úspešného OZ na dynamickú stabilitu sústavy ............................................ 80
Obr. 4.12 Maximálny výkon prenosu Pmax je nízky ................................................................ 81

1 Problematika stability elektrizačných sústav
5
1 PROBLEMATIKA STABILITY ELEKTRIZAČNÝCH
SÚSTAV
Elektrizačná sústava (ES) je súbor výkonových prvkov, ktoré sú v prevádzke riadené
tak, že na seba vzájomne pôsobia a sú neustále viazané jednotou chodu výroby, prenosu a
spotreby elektriny [1]. V ES rozlišujeme:
a) vlastné elektrické parametre sústavy, ako sú rezistencia R, reaktancia X, konduktancia
G a kapacitancia B.
b) prevádzkové elektrické parametre sústavy, ako sú napr. napätia, prúdy, činné a jalové
výkony, frekvencie a pod.
Elektrizačná sústava je chápaná ako dynamický systém, teda systém, v ktorom
okamžitá hodnota vnútorných veličín závisí na okamžitých hodnotách riadenia a na stave
systému v danom okamihu [2]. Pod pojmom stav systému rozumieme súbor vnútorných
veličín systému, ktorý v sebe zahŕňa informácie o minulom vývoji systému. Vo všeobecnosti
môžeme stav systému definovať ako najmenšiu množinu čísel obsahujúcich celkovú
informáciu, nevyhnutnú pre určenie jeho ďalšieho správania.
Doteraz neexistuje dostatočne prepracovaná a prakticky využiteľná jednotná teória
zložitých (rozľahlých) systémov. Sú vypracované teórie jednotlivých druhov systémov,
väčšinou s použitím odlišného matematického aparátu. Elektrizačnú sústavu radíme do
kategórie rozľahlých systémov kybernetického typu [2], lebo:
a) prepojením jednotlivých článkov nadobúda ES nové vlastnosti, ktoré jednotlivé články
samy o sebe nemali (preto možno hovoriť o systéme),
b) ES zahŕňa veľké množstvo prepojených častí prevádzkovaných na rozľahlom území
(preto ES radíme medzi rozľahlé systémy),
c) pre ES je typické množstvo spätných väzieb s prenosom a spracovaním informácií
(preto ich môžeme zaradiť ku kybernetickým systémom).
Okrem prevádzkových zásahov (náhle odľahčenie alebo náhla zmena konfigurácie
siete) sú najčastejšou príčinou narušenia stability skraty. Priebeh týchto poruchových javov je
sprevádzaný silne nelineárnou zmenou prevádzkových parametrov. A tak v snahe o čo
najvernejší popis priebehov týchto poruchových javov prebehajúcich v ES, je potrebné
zamerať sa na možnosti riešenia prechodných javov v nelineárnych systémoch [2].
Procesy prebiehajúce v nelineárnych systémoch sa zásadne líšia od prechodných javov
v lineárnych systémoch. Prítomnosť nelineárneho prvku (alebo prvkov) môže viesť nielen ku
kvantitatívnym zmenám prechodného javu, ale aj ku vzniku kvalitatívne nových javov.
Nelineárny prvok môže v určitom časovom úseku priebeh sledovanej veličiny urýchliť, v
inom úseku ho naopak spomaliť. Môže sa pritom podstatne zväčšiť aj amplitúda vyšetrovanej
veličiny v priebehu prechodného javu bez toho, aby nastali kvalitatívne zmeny priebehu.
Stabilita nelineárnych systémov je veľmi komplexný pojem, ktorý sa úplne líši od
bežného pojatia stability u lineárnych systémov. Stabilita lineárneho systému je vlastnosť
tohto systému a nezávisí na jeho okamžitom stave ani na vstupných signáloch. Lineárny
systém je buď stabilný, alebo nestabilný v celom stavovom priestore [2].
Stabilita daného systému sa často definuje ako jeho schopnosť vrátiť sa do
rovnovážneho stavu, ak skončilo pôsobenie veličiny, ktorá ho z tohto stavu vyviedla. Pre
lineárne systémy je táto definícia postačujúca, a preto môžeme pre ne definovať stabilitu aj
iným spôsobom: lineárny systém je stabilný vtedy a len vtedy, ak je jeho odozva na
ľubovoľný ohraničený vstup ohraničená. Pre nelineárne systémy už bolo vyslovených
niekoľko desiatok rôznych definícii stability. Mnohé z nich majú iba obmedzené použitie,
pretože boli definované pre špeciálne prípady.

1 Problematika stability elektrizačných sústav
6
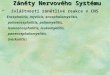
1.1 Klasifikácia a názvoslovie stability elektrizačných sústav
Pod pojem stabilita elektrizačnej sústavy sú zaraďované prechodné javy súvisiace so
zmenami záťažového uhla generátora, so zmenami frekvencie a napätia. S ohľadom na široký
záber problematiky je potrebná klasifikácia stability elektrizačnej sústavy podľa obr. 1.1.
Obr. 1.1 Klasifikácia stability elektrizačnej sústavy [2]
Synchrónne stroje plnia v rámci ES v zásade tri funkcie: synchrónne generátory,
synchrónne motory a synchrónne kompenzátory [2]. Všetky uvedené zariadenia sú
prostredníctvom vedení a transformátorov navzájom pospájané a sú v paralelnom
synchrónnom chode. Vo všeobecnosti je prenosová schopnosť tejto sústavy obmedzená
prúdovou zaťažiteľnosťou vodičov, dovolenými úbytkami napätí, pri prenose zvn a vvn na
väčšie vzdialenosti pristupuje podmienka stability paralelného chodu.
Udržiavanie synchronizmu, t.j. udržanie stability paralelného chodu, je základným
predpokladom existencie a prevádzky veľkých navzájom prepojených energetických sústav.
Synchrónny chod umožňuje tzv. synchronizačný výkon synchrónneho stroja. Tento výkon
chápeme ako prírastok prenášaného výkonu pri zväčšení záťažového uhla rotora generátora
o 1°. Dodržanie synchronizmu však nie je len úlohou synchrónnych strojov. Tieto sú
pospájané vedeniami. Elektrické spojenie dvoch alebo viacerých strojov nemá povahu tuhého
spojenia. Toto spojenie je elastickej povahy a spolupráca synchrónnych strojov nemôže byť
pri ľubovoľne veľkom výkone [2]. Pri pomalom zvyšovaní prenášaného výkonu, ak nie sú
podmienky prenosu porušené, môžeme dosiahnuť stabilne maximálny výkon (statická
stabilita). Rovnováha celej sústavy teda závisí na elektromagnetických, mechanických a
elektrických parametroch sústavy. Pri výskyte prechodných javov, ktoré menia impedanciu
prenosovej cesty medzi paralelne pracujúcimi strojmi, a tým aj vzájomnú polohu rotujúcich
más, sa zaoberáme podmienkami udržania dynamickej stability sústavy. Narušenie stability
synchrónnych strojov má rovnaký fyzikálny základ, ale z praktických dôvodov rozlišujeme
statickú a dynamickú stabilitu.
Statická stabilita nezávisí na druhu zmeny, ani na počiatočnom stave. Dynamickú
stabilitu je vždy potrebné určovať pre konkrétnu zmenu a pre dané počiatočné podmienky. Z
toho vyplýva, že nelineárna sústava, ktorá je schopná udržať stabilitu pri malých zmenách
prevádzkových parametrov, môže byť nestabilná pre väčšie zmeny. Statická stabilita
počiatočného prevádzkového stavu je teda nutnou, ale nie postačujúcou podmienkou pre
dynamickú stabilitu ES [2].
STABILITA ELEKTRIZAČNEJSÚSTAVY
Stabilita uhla rotoragenerátora
Frekvenčnástabilita
Napäťovástabilita
Dynamickástabilita
Statickástabilita
Krátkodobá Krátkodobá Dlhodobá Krátkodobá Dlhodobá
Napäťová stabilitapri veľkej poruche
Napäťová stabilitapri malej poruche

1 Problematika stability elektrizačných sústav
7
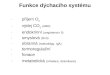
Delenie stability na statickú a dynamickú súvisí s dĺžkou prechodného javu a s typom
poruchy. Na obr. 1.2 je prehľad prechodných javov, vyskytujúcich sa počas prevádzky ES, v
závislosti od dĺžky ich trvania.
Obr. 1.2 Klasifikácia prechodných javov [2]
Prechodné javy výrazným spôsobom ovplyvňujú spoľahlivosť chodu ES. Riešenie
spoľahlivosti chodu ES z historického hľadiska vznikol ako problém pri spájaní miestnych
lokálnych sietí do väčších celkov až po prepojenie do elektrizačnej sústavy z dôvodu potreby
aspoň približne predvídať správanie sa takejto sústavy pri vzniku prechodných javov.
Základným prevádzkovým stavom každej elektrizačnej sústavy je jej ustálený chod
spočívajúci v rovnovážnom stave prevádzkových (stavových elektrických a mechanických)
veličín systému. Ľubovoľná zmena prevádzkových parametrov systému má za následok
narušenie ustáleného chodu (rovnovážneho stavu) v dôsledku čoho vzniká prechodný jav.
Prechodné javy v ES vznikajú vždy pri prechode ES z jedného ustáleného stavu do nového
ustáleného prevádzkového stavu alebo počas prechodného javu keď niektorý prevádzkový
parameter zmení svoju hodnotu tak, že nedôjde k obnoveniu rovnovážneho stavu, ale dôjde k
tzv. nestabilite sústavy (napr. strate synchronizmu jedného z paralelne pracujúcich
generátorov).
Prechodný jav chápeme ako časovú zmenu, pri ktorej sa mení určité množstvo energie
viazané k danému elektrickému alebo elektromechanickému obvodu na inú formu energie, a
preto sa nemôže takýto jav uskutočniť skokom, ale podľa platných fyzikálnych zákonov
popisujúcich takéto deje. Z tohto hľadiska prechodné javy v ES rozdeľujeme na:
1. Vlnové prechodné javy, ktorých čas trvania prechodného javu sa udáva v
mikrosekundách až milisekundách. Takáto sústava musí byť skúmaná z pohľadu svojich
vlnových vlastností, a to skúmanie časových a priestorových dejov súčasne (rozložené
elektrické parametre jednotlivých prvkov), pričom pomalé zmeny, napr. otáčky paralelne
pracujúcich generátorov na tieto zmeny nemajú vplyv.
2. Elektromagnetické prechodné javy s časom trvania rádovo do 2-3 milisekúnd (poistky)
alebo od 0,1 sekundy až do 3 – 5 sekúnd (elektrická ochrana s výkonovým vypínačom), v
závislosti od stupňa vypnutia. U takýchto javov, vzhľadom k menším rýchlostiam
časových zmien, možno zanedbať rýchlosť šírenia elektromagnetických vĺn na všetkých
prvkoch ES a jednotlivé silnoprúdové zariadenia sústavy možno skúmať so sústredenými
vlastnými elektrickými parametrami. Ďalej v priebehu elektromagnetických prechodných
javov možno zanedbať zmeny otáčok točiacich sa elektrických strojov (f = konšt.), čím ES
ELEKTROMAGNETICKÉ TERMODYNAMICKÉ
ELEKTROMECHANICKÉ PRECHODNÉ JAVY
milisekunda sekunda minúta hodina
10-4
10-3
10-2
10-1
1 10 100 1 000 10 000čas [sec]
Vlnové javyKlimatické javy
Blesky Skraty
Dynamická stabilita
krátkodobá
strednodobádlhodobá
Zemné spojenia
Ferorezonancia
Výpadky zariadedení Zásahy obsluhy a dispečerov
Zmeny zaťaženia
Budenie
Turbína - primárna regulácia
Frekv. odľahčovanie
Vinutia točivých strojov
Zotrvačnosť sústrojenstiev
Sieť (vedenia, FACTS, atď.)
Sekundárna regulácia P/f
Dynamika kotla
Obmedzovače prúdov
Zmena odbočiek transf.
Nábeh rezervy

1 Problematika stability elektrizačných sústav
8
chápeme ako čisto elektrický systém bez vplyvu mechanických vlastností prvkov ES na
priebeh prechodného javu.
3. Elektromechanické prechodné javy, s časom trvania v širokom časovom rozmedzí,
rádovo od desatín sekundy až po niekoľko desiatok sekúnd. Pri riešení takýchto
prechodných javov zanedbávame šírenie elektromagnetických vĺn v prvkoch ES a vo
väčšine i elektromagnetickú zotrvačnosť jednotlivých prvkov. Elektromechanické
prechodné javy v ES sú charakterizované predovšetkým mechanickým pohybom rotorov
generátorov, a to jednak zákonitosťami vlastného pohybu rotorov a elektromagnetickými
silami, ktoré na tento pohyb majú vplyv. Prvky elektrického zapojenia ES plnia funkciu
väzby medzi paralelne pracujúcimi generátormi, a preto prenášajú mechanické sily z
hriadeľa jedného generátora na hriadele ostatných spolupracujúcich generátorov. Preto pri
riešení elektromechanických prechodných javov v ES vychádzame z mechanických
zotrvačných vlastností elektrických točivých strojov a z elektrických väzieb medzi
jednotlivými prvkami elektrizačnej sústavy, danými prevádzkovou schémou zapojenia
jednotlivých prvkov ES.
Jeden kyv rotora synchrónneho generátora po poruche reprezentuje priebeh
záťažového uhla synchrónneho generátora pre jednu periódu prirodzenej frekvencie stroja.
Prirodzená frekvencia oscilácií rotora synchrónneho generátora je obvykle v intervale 0,1 Hz
až 2,5 Hz. Z toho vyplýva, že časová perióda kývania uhla rotora sa mení od 10 s do 0,4 s v
extrémnych prípadoch [2].
Prechodné javy spadajúce do oblasti výskumu stability aj podľa vzniku a priebehu je
možné rozdeliť na tri veľké skupiny [2]:
1. Patria sem javy vznikajúce pri veľkých zmenách činného výkonu, prúdu a napätia, ale pri
malých zmenách otáčok generátorov. Táto skupina je spojená s riešením úloh napr.
dynamickej stability sústavy, presnej synchronizácie, veľkých kývaní rotorov, nárazového
budenia atď.
2. Javy nastávajúce pri malých rázoch v sústave a malých odchýlkach rotorov generátorov od
ich ustálenej polohy, pri malých zmenách výkonu, prúdu a napätia, a čo je dôležité pri
malých zmenách otáčok generátorov. Túto skupinu javov skúmame pri úlohách statickej
stability pri malých kyvoch strojov v ES, pri nastavovaní samočinných regulačných
zariadení atď. Tieto úlohy sa spravidla riešia ako lineárne.
3. Do tejto skupiny patria deje, pri ktorých počas veľkých zmien výkonu dochádza k veľkým
zmenám otáčok. Tu sa riešia úlohy napr. spúšťania a rozbehu sústrojenstiev, asynchrónny
chod synchrónnych generátorov, samovoľná synchronizácia atď.
Pri názvosloví z oblasti stability dochádza veľmi často ku zámene pojmov, ktoré sú
preberané z inojazyčnej literatúry. V ďalšom sú uvedené základné pojmy a definície z oblasti
stability elektrizačných sústav, doplnené o anglické ekvivalenty [2].
Stabilita (stability): je schopnosť ES zostať v synchrónnej rovnováhe pri ustálených
prevádzkových podmienkach, alebo obnoviť túto rovnováhu po poruche.
Statická stabilita (steady-state stability): je schopnosť ES zachovať stabilitu za
podmienky, že v sústave nedôjde k aperiodickej poruche.
Statická stabilita bez účinku automatických zariadení (steady-state stability
without automatic devices): je schopnosť ES zachovať statickú stabilitu bez pomoci
automatického zariadenia. Pod automatickými zariadeniami sa z hľadiska stability rozumejú
prístroje, ktoré zlepšujú stabilitu. Patria sem hlavne automatické regulátory napätia a
regulátory budenia. Výkonové vypínače a ochrany pôsobia iba jednorázovo a preto do tejto
kategórie nepatria [2].
Statická stabilita s účinkom automatických zariadení (steady-state stability with
automatic devices): je schopnosť ES zachovať statickú stabilitu ak pôsobí automatické
zariadenie.

1 Problematika stability elektrizačných sústav
9
Dynamická stabilita (transient stability): je schopnosť ES obnoviť statickú stabilitu
po aperiodickej poruche.
Dynamická stabilita bez účinku automatických zariadení (transient stability
without automatic devices): je schopnosť ES obnoviť statickú stabilitu po aperiodickej
poruche bez pomoci automatických zariadení.
Dynamická stabilita s účinkom automatických zariadení (transient stability with
automatic devices): je schopnosť ES obnoviť statickú stabilitu po aperiodickej poruche s
pomocou automatických zariadení.
Podľa dĺžky trvania prechodného javu sa potom rozlišuje: krátkodobá stabilita (short-
term stability), strednodobá stabilita (mid-term stability), dlhodobá stabilita (long-term
stability) (obr. 1.2).
Rovnako je potrebné uviesť pojmy týkajúce sa nestability. Rozlišuje sa uhlová
nestabilita (angle instability) a napäťová nestabilita (voltage instability). Uhlová nestabilita sa
týka statickej a dynamickej stability, kým napäťová nestabilita súvisí s nedostatkom jalového
výkonu, ktorý môže rovnako zapríčiniť nestabilitu ES.
S osciláciami rotora synchrónneho generátora súvisí pojem lokálny alebo
elektrárenský režim (local mode alebo plant mode). Lokálny režim je charakterizovaný
stavom, pri ktorom elektrárne alebo jednotlivé bloky po poruche oscilujú proti zvyšku
systému s frekvenciou v intervale od 0,8 Hz do 2,5 Hz. Javu, pri ktorom niektoré stroje z
jednej časti ES oscilujú proti strojom z inej časti ES s frekvenciou od 0,1 Hz do 0,7 Hz sa
hovorí medzioblastný režim (inter-area mode, tie-line, resp. inter tie oscillations) [2].
1.2 Elektromechanické prechodné javy
Analýza pomerov elektrizačnej sústavy počas elektromechanických prechodných
javov zahrňuje okrem elektrických dejov i deje elektromechanické a to z dôvodu vzájomnej
väzby jednotlivých prvkov ES. Ide o väzby mechanické (napr. turbína – generátor), väzby
elektrických zdrojov (paralelne pracujúce synchrónne generátory ), väzby prvkov prenosovej
a distribučnej sústavy (transformátory – elektrické vedenia ) a elektrických spotrebičov (rôzne
elektrické spotrebiče a motory). Pri tomto je potrebné si uvedomiť, že pri spojení takýchto
prvkov do elektrizačnej sústavy, nadobúdajú tieto prvky počas prevádzky ako celku nové
vlastnosti, odlišné od dejov, ktoré charakterizujú samostatne vlastnosti týchto prvkov. Takto
chápané deje zaraďujeme do oblasti stability prenosu elektrickej energie. [1]
V normálnej prevádzke jednotlivé výkonové prvky pracujúce v ES spĺňajú určité
podmienky, ktoré charakterizujú chod ES (tzv. prevádzkové parametre sústavy ako sú napätia,
prenášané činné a jalové výkony, frekvencia a pod.). Na základe týchto podmienok generátory
pracujú synchrónne a ES ako celok je stabilná. Narušenie normálnych podmienok práce vedie
k nestabilite sústavy. Analýza prechodných elektromechanických javov a opatrenia vedúce k
zachovaniu stabilnej prevádzky ES vedie k riešeniu problémov statickej a dynamickej
sústavy. [1]
Do problematiky statickej stability zahŕňame javy, ktorých spoločným znakom je
príčina spočívajúca v malých odchýlkach pracovného režimu vedúca k stabilite alebo
nestabilite sústavy [1]. Do statickej stability zaraďujeme i skúmanie dejov, či za daných
podmienok prenosu je vôbec možná stabilná prevádzka ES. Malé zmeny, prípadne odchýlky v
normálnej prevádzke z hľadiska statickej stability vedú k značným zmenám niektorých
režimových prevádzkových parametrov ES. Tieto deje vždy prebiehajú spočiatku pomaly v
podobe ľubovoľných malých zmien normálnych prevádzkových parametrov. Pri týchto
zmenách dochádza v ES k osciláciám, výsledkom ktorých je ustálenie na nových
prevádzkových parametroch alebo dôjde k porušeniu synchronizmu paralelne pracujúcich
generátorov (rozpad ES). Z pohľadu generátorov odchýlky, vedúce k ohrozeniu statickej
stability, sú nasledovné:

1 Problematika stability elektrizačných sústav
10
a) zníženie budiaceho napätia generátorov (chybná činnosť regulátorov budenia),
b) náhle zníženie napätia v uzloch ES (napr. pomalá zmena zaťaženia činného výkonu),
c) zvýšenie mechanického výkonu turbíny (chybná regulácia otáčok turbíny).
Obr. 1.3 Mechanické výkony turbína – generátor [1]
Ak si predstavíme spoluprácu turbína - generátor podľa obr. 1.3, normálna prevádzka
je charakterizovaná rovnováhou mechanického výkonu turbíny na hriadeli s elektrickým
brzdným výkonom , výsledkom čoho je synchrónny chod generátora s
konštantnou frekvenciou ( ). Elektrický výkon odoberáme zo svoriek
generátora, pričom predstavuje straty činného výkonu premeny mechanického výkonu na
elektrický výkon v synchrónnom generátore. Vo všetkých vyššie menovaných prípadoch
dôjde k nerovnováhe medzi mechanickým výkonom turbíny a brzdným elektrickým
výkonom , v dôsledku čoho vznikne akceleračný výkon, ktorý spôsobí mechanické
urýchlenie rotora generátora a teda i ohrozenie stability sústavy (možný výpadok generátora
zo synchronizmu).
V rámci dynamickej stability zisťujeme schopnosť ES zachovať synchrónnu
spoluprácu jej dielčich častí pri rýchlych zmenách činného zaťaženia [1]. K takýmto rýchlym
zmenám zaťaženia patria skraty alebo veľké zmeny zaťaženia činného výkonu v blízkosti
generátorov (vypnutie, resp. zapnutie záťaže), vrátane chybného odpojenia generátorov
veľkých výkonov od ES (napr. v dôsledku chybného pôsobenia ochrán generátorov), ale tiež i
v dôsledku zmien reaktancií v ES (zmena schémy prevádzky ES, vypnutie , resp. zapnutie
vedení, zmena impedancie záťaže a pod.).
Z hľadiska riešenia stability sústavy vo väzbe na čas trvania prechodného javu možno
pri riešení charakterizovať tieto deje ako [1]:
a) elektrické systémy so sústredenými elektrickými parametrami,
b) odchýlky uhlových rýchlostí jednotlivých generátorov ES s uhlovou rýchlosťou
predporuchového stavu (synchrónna uhlová rýchlosť), sú veľmi malé, a preto
všetky statické prvky v ES (vedenia, transformátory a pod.) možno predpokladať, že
pracujú v ustálenom stave s konštantnou uhlovou synchrónnou rýchlosťou
(reaktancie sú konštanty).
Prijatím týchto predpokladov sa matematický model pre riešenie stability značne
zjednodušuje. Prvý predpoklad znamená, že pri matematickom popise systému prejdeme od
parciálnych diferenciálnych rovníc na obyčajné diferenciálne rovnice s časom ako jedinou
nezávislou premennou. Druhý predpoklad znamená, že statické prvky ES (transformátory,
vedenia) budú popísané rovnicami s konštantnými koeficientmi. Pôjde teda o matematický
model, v ktorom jednotlivé generátory budú popísané obyčajnými diferenciálnymi rovnicami
a tieto rovnice budú medzi sebou viazané sústavou algebraických rovníc, popisujúcich
elektrickú časť ES, ktorá tieto generátory spája. [1]
TurbínaSynchrónnygenerátor
Pel = P0
PPbPt

2 Statická stabilita
11
2 STATICKÁ STABILITA
Prípady riešenia statickej stability ES ako celku sa nevyskytujú často. Obyčajne sa
rieši stabilita časti sústavy v spolupráci s ostatnou sústavou. Z tohto dôvodu je v ES výhodné
urobiť také zjednodušenia, ktoré vedú k riešeniu stability s malým počtom generátorov [1].
Takéto zjednodušenie nesmie zhoršiť presnosť riešenia a použiteľnosť výsledkov v praxi.
Najväčším zjednodušením pri skúmaní statickej stability časti ES je zjednodušenie na jediný
generátor a zvyšok ES je nahradený tzv. tvrdou sieťou (sieť nekonečne veľkého výkonu,
pretože je charakterizovaná konštantným napätím sústavy a stálou frekvenciou
siete ), obr. 2.1.
Obr. 2.1 Náhradná schéma: generátor – sieť nekonečne veľkého výkonu [1]
V náhradnej schéme takejto sústavy je symbolom označené fiktívne indukované
elektromotorické napätie náhradného generátora (zdroja), je výstupné napätie na svorkách
generátora a je napätie na prípojniciach siete nekonečného výkonu. Ďalšie zjednodušenie
predstavuje zanedbanie rezistencií v sústave, pretože pomer je pomerne malý [1]. Pomer
základných prvkov v elektrizačnej sústave je orientačne uvedený v tab. 2.1.
Elektrické zariadenie Pomer R : X
Vedenia 110 kV 1:2 až 1:10
220 kV 1:6 až 1:10
400 kV 1:11 až 1:13
Transformátory 1:10 až 1:20
Generátory (synchrónna reaktancia Xd): 1:20 až 1:200
Tab. 2.1 Pomer základných prvkov sústavy [1]
Z tab. 2.1 je vidieť, že najhorší pomer z prenosových zariadení majú vedenia.
Preto sa rezistencia u generátorov a transformátorov spravidla zanedbáva. Rezistencia u
prvkov sústavy sa berie do úvahy v prípadoch presnejších výpočtov pri ktorých je použitá
výpočtová technika. Pri orientačných výpočtoch z dôvodu zjednodušenia postačuje urobiť
výpočty len s uvažovaním reaktancií.
Fázorový diagram napätí a prúdov pre prenos výkonu, podľa obr. 2.1, je znázornený
na obr. 2.2 Výsledná reaktancia prenosu (rezistencie zanedbávame), kde
je synchrónna reaktancia generátora.
SIEŤ
G T UUG VEDENIE
P,Q
SIEŤ
E UXG
P,Q
UG XT XV

2 Statická stabilita
12
Trojfázový činný výkon , ktorý dodáva ekvivalentný generátor do siete nekonečného
výkonu je vyjadrený vzťahom [1]
(1)
Obr. 2.2 Fázorový diagram prenosu činného výkonu
Podľa obr. 2.2 môžeme z pravouhlých trojuholníkov ABC a 0BC pre úsečku BC
napísať vzťah
(2)
z ktorého úpravou dostaneme:
(3)
Dosadením vzťahu (3) do (1) dostaneme:
(4)
Tento vzťah vyjadruje základnú závislosť činného výkonu na záťažovom uhle pri
konštantnom budení generátora. Grafickým znázornením tejto závislosti je sínusovka (obr.
2.3). Túto závislosť nazývame vnútorná výkonová rovnica prenosu sústavy.
Priebeh výkonu v závislosti na záťažovom uhle je daný goniometrickou funkciou
, ktorá na intervale má jedno lokálne maximum. Z tohto priebehu vyplýva, že
takouto sústavou nie je možné preniesť do miesta spotreby ľubovoľný činný výkon.
Maximálny prenášaný výkon je daný maximálnym dovoleným záťažovým uhlom, pri
ktorom platí
(
)
(5)
A B
C
E
U
j·X I·
I
0

2 Statická stabilita
13
teda
(
)
(6)
odkiaľ vyplýva
(7)
Obr. 2.3 Závislosť činného výkonu na záťažovom uhle
Pre maximálny prenášaný činný výkon platí vzťah
(8)
S rastúcou veľkosťou reaktancie prenosu hodnota maximálneho výkonu pri
konštantných napätiach a klesá. Dlhým vedením nebude teda možné preniesť bez
osobitných opatrení taký istý činný výkon ako vedením krátkym. S dĺžkou vedenia rastie
reaktancia vedenia a teda i záťažový uhol prenosu .
V ďalšom rozhodneme o stabilnej a nestabilnej časti vnútornej rovnice prenosu.
Predpokladajme sústavu turbína – generátor podľa obr. 1.3, ktorá je v rovnováhe v bode A,
obr. 2.4. Výkon turbíny je v rovnováhe s brzdným elektrickým výkonom .
Predpokladajme, že v bode A došlo k zmene záťažového uhla o oproti rovnovážnemu
stavu . Zväčšenie záťažového uhla znamená, že , teda brzdný
výkon pôsobí na spomalenie sústavy, výsledkom čoho je zmenšovanie uhla na hodnotu .
Analogicky pri zmenšení záťažového uhla na bude platiť , čo
spôsobuje zrýchlenie sústavy a zväčšenie uhla na hodnotu . Výsledkom týchto zmien je
tlmené kývanie rotora generátora okolo synchrónnej uhlovej rýchlosti, ktorého chod sa znovu
ustáli na pôvodných parametroch , (bod A).
P
Pm
0° 90° 180°

2 Statická stabilita
14
Obr. 2.4 Stabilná a nestabilná oblasť výkonovej charakteristiky prenosu
Predpokladom takto opísaného deja je, že prvotná príčina zmeny uhla o zanikla.
V opačnom prípade sa regulačnými prvkami turbíny (regulácia ) alebo generátora (regulácia
budenia – ) nastaví nový rovnovážny stav s inými hodnotami .
Popísaný dej obnovenia rovnováhy v bode A zrejme bude prebiehať pri každej
hodnote uhla v intervale . Táto oblasť „čelnej časti“ charakteristiky rovnice
prenosu predstavuje oblasť stabilnej prevádzky v ustálenom stave chodu sústavy, t.j. z
hľadiska statickej stability. Ide o oblasť tzv. prirodzenej stability.
Všimnime si zmeny za predpokladu, že pracovným bodom sústavy je bod B ( ).
Pri vzraste uhla o hodnotu sa odoberaný výkon zmenší o hodnotu , teda . Týmto brzdný výkon poklesne pod hodnotu dodávaného mechanického výkonu
a rotor generátora sa bude zrýchľovať, čo sa prejaví ešte v ďalšom zvyšovaní uhla . Takto
rozdiel výkonov rastie a nerovnovážny stav sa ďalej zväčšuje, pretože dôsledok nepôsobí
proti príčine. K obnoveniu rovnováhy nemôže dôjsť, čím generátor vypadne zo
synchronizmu. V bode B nie je možná stabilná prevádzka. Z tohto dôvodu „tylová časť“
rovnice pri uhloch prenosu predstavuje staticky nestabilnú oblasť prevádzky
sústavy. Pri uhle platí , a vtedy hovoríme o medzi statickej stability.
Pre zmenu činného výkonu v okolí uhla (obr. 2.4) platí vzťah (9), za
predpokladu, že dodávaný činný výkon je len funkciou uhla .
(
)
(9)
Pre určitú konkrétnu hodnotu uhla označme prvú deriváciu výkonu nasledovne
(
)
(10)
Dosadením rovnice (10) do (9) a úpravou dostaneme
(11)
kde veličinu nazývame synchronizačný výkon. Tento výkon môžeme interpretovať ako
prírastok prenášaného výkonu pri zväčšení uhla o 1° (prípadne o 1 rad.). V oblasti stabilnej
prevádzky vnútornej rovnice prenosu platí .
P
Pm
0° 90° 180° 0
+
P
A
P
+
stab. nestab.
B+
P
0
+
P =Pt 0
P

2 Statická stabilita
15
Príklad 1
Turboalternátor dodáva do siete činný výkon 110 MW pri napätí
a účinníku induktívnych. Posúďte, či prenos sústavou bude staticky stabilný.
Úlohu riešte v pomerných hodnotách so zanedbaním rezistencií.
Parametre prvkov:
G1: 110 MW; 13,8 kV; ; ;
T1: 125 MVA; 13,8/121 kV; ;
V1, V2: ( ) ⁄ ; ;
T2: 200 MVA; 231/121 kV; ;
Riešenie
Nakreslíme si náhradnú schému obvodu:
Vypočítame si reaktancie všetkých prvkov obvodu. Ako vzťažné hodnoty si zvolíme
(menovité napätie siete) a (najväčší menovitý výkon prvku v
sieti).
G1:
p.j. 496,3220
200
121
231
8,13
121
8,0
110
8,13
100
218
100 2
222
2
2
2
2
1
2
1
V
V
G
GdG
U
Spp
S
Uxx
T1:
p.j. 221,0220
200
121
231
125
121
100
5,12
100 2
22
2
2
2
1
2
11
V
V
T
TkT
U
Sp
S
Uux
V1, V2:
p.j. 602,0220
200
121
2311004,0
2
2
2
2
2)1(21
V
VVV
U
SplXxx
T1G1 T2V1
P0 = 110 MWcos = 0,8
U = 210 kV
SIEŤV2
u.
xT1
xV1
i.xG1 xT2
e.
SIEŤ
xV2

2 Statická stabilita
16
T2:
p.j. 108,0220
200
200
231
100
8,9
100 2
2
2
2
2
22
V
V
T
TkT
U
S
S
Uux
Obvod si zjednodušíme a vypočítame výslednú impedancia obvodu:
p.j. 126,4108,02
602,0221,0496,3
22
111 T
VTG x
xxxx
Určíme si fázor napätia siete:
p.j. 955,0220
210 0j0j0j eeeU
Uu
V
Zdanlivý výkon dodávaný do siete:
87,368,0arccoscosarccos
p.j. 688,0p.j. 413,0j55,02008,0
110
cos
87,36j87,36jj00
eeeS
Ps
V
Prúd dodávaný alternátormi do tuhej siete:
p.j. 72,0p.j. 432,0j576,0955,0
688,0 87,36j
0j
8736j
0
e
e
e
u
si
,
Napätie ideálneho zdroja:
p.j. 626,3p.j. 377,2j737,2
72,0126,4j955,0j
97,40j
87,36j
e
eixue
Záťažový uhol (uhol medzi fázormi a ) je:
97,400
Maximálny prenášaný výkon:
p.j. 839,0126,4
955,0626,3max
x
ue
x
uep
Výkonová rovnica prenosu bude:
sin839,0sinmax pp
Výkon dodávaný alternátorom do tuhej siete bude:
p.j. 55,097,40sin839,0sin839,0 00 p

2 Statická stabilita
17
Čo odpovedá výkonu v zadaní (reálna zložka komplexného zdanlivého výkonu ), a teda
výpočet je správny.
Koeficient rezervy výkonu:
% 51,5210055,0
55,0839,0100
0
0max
p
ppk p
Prenos výkonu sústavou je staticky stabilný, pretože sa uskutočňuje s dostatočnou rezervou
výkonu %.20%51,52 pk
2.1 Základné vzťahy pre určenie výkonov prenosu
Pre riešenie úloh stability elektrizačnej sústavy je potrebné poznať vzťahy medzi
prevádzkovými elektrickými veličinami charakterizujúcimi prenos, ako sú prúdy, napätia,
činné a jalové výkony, záťažové uhly a pod. Z tohto dôvodu je potrebné pre danú prenosovú
sieť tieto veličiny vypočítať. Na obr. 2.5 je zobrazená schéma prenosovej sústavy s
n-generátormi. Sieť v obdĺžniku predstavuje impedančnú pasívnu lineárnu sieť s n-uzlami. Do
týchto uzlov sú pripojené externé synchrónne generátory s vnútornými napätiami
cez synchrónne reaktancie . Spoločný neutrálny bod
generátorov je pripojený do uzemnenia siete . Označme prúdy, ktoré tečú od generátorov do
pasívnej siete pripojených na svorky písmenami .
Obr. 2.5 Prenosová sústava s n-generátormi
Elektrický výkon dodávaný do pasívnej siete vyjadríme pomocou súčinu
napätia generátora a konjugovaného fázora prúdu . Aplikujúc tento postup na každý uzol
siete dostaneme nasledovnú sústavu rovníc:
(12)
E1
I1
I2
In
1
2
n
Sieť
N
E2
En

2 Statická stabilita
18
Pomocou metódy uzlových napätí vypočítame veľkosti napájacích prúdov generátorov
nasledovne:
∑
∑
∑
(13)
kde – vlastné väzobné impedancie sústavy,
– vzájomné väzobné impedancie sústavy
Celkový prúd od generátora G1 sa skladá z čiastkových prúdov od jednotlivých
zdrojov (metóda superpozície) nasledovne:
(14)
Každý z týchto čiastkových prúdov tečie vetvou 1. Tieto prúdy sú superpozíciou
čiastkových prúdov od jednotlivých zdrojov . Čiastkový prúd vetvy 1 vzniká
pôsobením od zdroja a ostané zdroje sú vyskratované.
(15)
Čiastkový prúd vetvy 1 vzniká pôsobením od zdroja a ostané zdroje sú
vyskratované.
(16)
Týmto postupom vypočítame všetky čiastkové prúdy (jednotlivé zložky v rovnici (13))
a potom dosadením do rovnice (12) prikročíme k výpočtu výkonov jednotlivých zdrojov
(17)
Pri výpočte stability nie je výhodné pracovať s fázormi, ale je potrebné mať k
dispozícii efektívne hodnoty elektrických veličín a ich uhly. Z tohto dôvodu zavedieme
napätia zdrojov v tvare
(18)
Vlastné a vzájomné impedancie jednotlivých uzlov sústavy zavedieme v tvare

2 Statická stabilita
19
( ) (19)
kde je doplnkový uhol do 90° k uhlu , teda . Analogicky môžeme
napísať
( ) (20)
kde je doplnkový uhol do 90° k uhlu , teda , atď.
Z rovnice (17) vypočítajme výkon zdroja G1
( )
( )
( )
( )
( )
( )
(21)
Podobne vypočítame i výkon zdroja G2
( )
( )
( )
( )
( )
( )
(22)
Z rovnice (21) vyjadríme činný výkon ( ) ( )
( )
( )
( )
(23)
Podobne z rovnice (22) vyjadríme činný výkon ( ) ( )
( )
( )
( )
(24)
Úpravou trigonometrickej funkcie ( ) , resp.
( ( )) ( )

2 Statická stabilita
20
(( ) )
(( ) )
(25)
Rovnicu pre činný výkon P2 upravíme
(( ) )
(( ) )
(26)
Rovnakým postupom môžeme vyjadriť činný výkon ostatných generátorov.
Jalové výkony vypočítame z rovníc (21) a (22) podobným spôsobom. Jalový výkon
zdroja G1 vypočítame použitím ( ) ( ) , čím dostaneme
( )
( )
( )
(27)
Podobne vyjadríme jalový výkon ( ) ( )
( )
( )
( )
(28)
Úpravou trigonometrickej funkcie ( ) , resp.
( ( )) ( )
(( ) )
(( ) )
(29)
Rovnicu pre jalový výkon Q2 upravíme
(( ) )
(( ) )
(30)
Rovnakým postupom môžeme vyjadriť jalový výkon ostatných generátorov.
Použitím rovníc (25), (26), (29) a (30) môžeme vyjadriť rovnicu činného a jalového
výkonu pre ľubovoľný generátor v sieti:

2 Statická stabilita
21
(( ) )
(( ) )
(31)
(( ) )
(( ) )
(32)
Predpokladajme dvojstrojovú sústavu podľa obr. 2.6 a), ktorá sa pri praktických
riešeniach úloh používa najčastejšie.
a) b)
c) d)
Obr. 2.6 Schéma dvojstrojovej sústavy; a) celková schéma; b) fázory napätí a
v komplexnej rovine; c) schéma pri pôsobení generátora G1; d) schéma pri pôsobení
generátora G2;
V tejto sústave impedancia predstavuje impedanciu prenosu, vrátane impedancie
generátora G1 po miesto spotreby, ktoré je určené spotrebiteľským napätím . Podobne
impedancia predstavuje impedanciu prenosu, vrátane impedancie generátora G2 po miesto
spotreby. Impedancia predstavuje záťaž odberateľa a napätie je napätie v mieste
pripojenia odberateľa. Na základe odvodených rovníc (25) a (26) stanovíme rovnice pre
dodávaný činný výkon generátorov a . Rovnice (29) a (30) použijeme na stanovenie
jalových výkonov, ktoré do záťaže dodávajú obidva generátory. Dodávaný jalový výkon je
indukčný.
Na výpočet jednotlivých prúdov použijeme metódu superpozície, podľa obr. 2.6 a),
obr. 2.6 c) a obr. 2.6 d). Vzhľadom na smery čiastkových prúdov , celkové prúdy od
generátorov , a prúd tečúci do záťaže, sa stanovia
E1 E2
P , Q1 1
I1 I2
I3
Z2
Z3
Z1
P , Q2 2
U
E1
E21
2
= 12
E1
I11 I21
I31
Z2
Z3
Z1
E2
I12 I22
I32
Z2
Z3
Z1

2 Statická stabilita
22
(33)
Ďalej, podľa obr. 2.6 b), zavedieme záťažový uhol medzi generátormi G1 a G2
nasledovne
(34)
Činný výkon a jalový výkon generátora G1 dodávaný do sústavy v mieste
pripojenia generátora
( ) (35)
( ) (36)
Činný výkon P2 a jalový výkon Q2 generátora G2 dodávaný do sústavy v mieste
pripojenia generátora
( ) (37)
( ) (38)
Na výpočet výkonov je potrebné poznať impedancie , , , a im
odpovedajúce doplnkové uhly , , , . Tieto stanovíme zo schém znázornených na
obr. 2.6 c) a obr. 2.6 d), pričom príslušné napätie zdroja je vyskratované. Impedancia je
vyjadrená pomocou vzťahu (15), ktorý upravíme na tvar
(39)
Pomocou obr. 2.6 d) určíme impedanciu nasledovne
(40)
Výpočet vzájomnej impedancie
(41)
Prúd vypočítame zo vzťahu pre prúdový delič podľa obr. 2.6 d)
(42)
a úpravou dostaneme

2 Statická stabilita
23
( )
(43)
teda
(44)
Podľa obr. 2.6 c) a podobným postupom vypočítame
(45)
Teda .
V týchto výpočtoch sme predpokladali jednofázové obvody. Prechodom na trojfázovú
sústavu je potrebné výkony vynásobiť číslicou 3. Nakoľko v odvodených vzťahoch v čitateli
je vždy súčin napätí, potom odvodené vzťahy platia i pre trojfázové výkony a súčin napätí v
čitateli je potrebné považovať za združené hodnoty.
Príklad 2
V sústave podľa obrázka vypočítajte závislosť činných a jalových výkonov alternátora
a tuhej siete. Úlohu riešte za predpokladu, že alternátor dodáva pri menovitom napätí a
menovitom účinníku 95% menovitého výkonu. Rezistencie prenosovej cesty zanedbajte.
Príklad riešte v pomerných hodnotách.
Parametre prvkov:
G1: 110 MW; 13,8 kV; ; ;
T1: 125 MVA; 13,8/121 kV; ;
V: dvojité vedenie, ( ) ⁄ ; ;
T2: 200 MVA; 121/405 kV; ;
Riešenie
Nakreslíme si náhradnú schému obvodu:
T1G T2V
(80+j·40) MVA
U
SIEŤ
UGUZ

2 Statická stabilita
24
Všetky impedancie je potrebné prepočítať na jednu napäťovú hladinu (napr. na svorky
alternátora). Vzťažné veličiny sa zvolia: UV = 13,8 kV (menovité napätie generátora),
SV = 200 MVA )maximálny výkon v obvode).
G:
MVA 5,1378,0
110
cos
G
G
PS
p.j. 171,38,13
200
5,137
8,13
100
218
100 2
2
2
2
V
V
G
GdG
U
S
S
Uxx
T1:
p.j. 2,08,13
200
125
8,13
100
5,12
100 2
2
2
1
2
11
V
V
T
TkT
U
S
S
Uux
V:
p.j. 273,08,13
200
121
8,131004,0
2
1
2
12
2
2
2
1)1(
V
VV
U
SplXx
T2:
p.j. 17,08,13
200
121
8,13
200
121
100
17
100 2
22
2
2
1
2
2
22
V
V
T
TkT
U
Sp
S
Uux
Zdanlivý výkon záťaže v pomerných hodnotách:
p.j. 447,02,0j4,0200
40j80 57,26j
eS
Ss
V
ZZ
Fázový posun je 8,0cos , teda
87,368,0arccoscosarccos
Zdanlivý výkon dodávaný alternátorom do sústavy v pomerných hodnotách:
p.j. 653,0392,0j523,08,0200
11095,0
cos95,0 87,36j87,36jj
eee
S
Ps
V
GG
Napätie na svorkách alternátora v pomerných hodnotách:
p.j. 18,13
8,13 0j0j0j eeeU
Uu
V
GG
Prúd dodávaný alternátorom do sústavy:
xT1 xVxG xT2
ė
.iG
.Gu
.Zu
.u
.iZ
.Zz
.iS

2 Statická stabilita
25
p.j. 653,0392,0j523,01
653,0 87,36j
0j
87,36j
e
e
e
u
si
G
GG
Indukované elektromotorické napätie alternátora:
p.j. 788,26571j243,2
653,0171,3j1j
46,36j
87,36j
e,
eixue GGG
Napätie v mieste záťaže:
p.j. 928,01050j922,0
653,02,0j1j
47,6j
87,36j
1
e,
eixuu GTGZ
Prúd tečúci záťažou:
p.j. 482,0263,0j404,0928,0
447,0 03,33j
47,6j
57,26j
e
e
e
u
si
Z
ZZ
Impedancia záťaže:
p.j. 924,186,0j721,1482,0
447,0 57,26j
2
57,26j
2
ee
i
sz
Z
ZZ
Prúd tečúci do siete:
p.j. 175,0129,0j118,0392,0j523,0263,0j404,0
653,0482,0
51,132j
87,36j03,33j
e
eeiii GZS
Napätie na prípojniciach siete:
p.j. 879,01570j864,0
052,0j057,01050j922,0078,0928,0
175,017,0273,0j928,0j
29,10j
49,137j47,6j
51,132j47,6j
2
e,
,ee
eeixxuu STVZ
Náhradnú schému prepočítame na T-článok:
p.j. 924,186,0j721,1
p.j. 443,0443,0j17,0273,0jj
p.j. 371,3371,3j2,0171,3jj
57,26j
3
90j
22
90j
11
ezz
exxz
exxz
z
TV
TG
Väzobné impedancie sú nasledovné:
ė .Zu
.u
.iZ
.3z
.iG
.1z
.2z .
iS

2 Statická stabilita
26
p.j. 219,4924,1
443,0371,3443,0371,3
p.j. 777,1924,1371,3
924,1371,3443,0
p.j. 76,3924,1443,0
924,1443,0371,3
48,99j
57,26j
90j90j90j90j
3
212112
17,58j
57,26j90j
57,26j90j90j
31
31222
89,88j
57,26j90j
57,26j90j90j
32
32111
ee
eeee
z
zzzzz
eee
eee
zz
zzzz
eee
eee
zz
zzzz
Záťažový uhol a doplnkové uhly sú:
48,948,999090
83,3117,589090
11,189,889090
74,4629,1046,36
12
22
11
12
22
11
0
z
z
z
ue
Závislosť činných a jalových výkonov:
48,9sin581,004,0sinsin 12
12
11
11
2
1 z
ue
z
ep
48,9cos581,0067,2coscos 12
12
11
11
2
1 z
ue
z
eq
48,9sin581,0229,0sinsin 21
21
22
22
2
2 z
ue
z
up
48,9cos581,0369,0coscos 21
21
22
22
2
2 z
ue
z
uq
Kontrolu výpočtu je možné urobiť pre prevádzku sústavy so záťažovým
uhlom 74,460 :
p.j. 523,048,974,46sin581,004,01 p
p.j. 744,148,974,46cos581,0067,21 q
p.j. 123,048,974,46sin581,0229,02 p
p.j. 093,048,974,46cos581,0369,02 q
Tieto hodnoty musia byť totožné s hodnotami pre zdanlivý výkon alternátora a siete:
p.j. 744,1j523,0821,1653,0788,2 33,73j87,36j46,36j eeeies GG

2 Statická stabilita
27
p.j. 093,0j123,0154,0175,0879,0 8,142j51,132j29,10j eeeius SS
Záporné znamienka u výkonov p2, q2 znamenajú, že činný a jalový výkon je dodávaný do
tuhej siete z prenosovej siete od alternátora.
Fázorový diagram napätí a prúdov je na nasledujúcom obrázku.
2.2 Výkonové rovnice generátorov pri konštantnom budení
Z teórie synchrónnych strojov je známe, že zmena zaťaženia generátora činným
výkonom sa vykoná na základe zmeny záťažového uhla . Na obr. 2.7 je znázornený stator
(kotva) a rotor synchrónneho generátora. V tomto obrázku je nakreslená pozdĺžna os rotora d
a priečna os q. Referenčná os x rotuje synchrónnou uhlovou rýchlosťou , ktorú vytvára
magnetické pole statora. Os q, v ktorej leží fiktívne budiace napätie zviera s
referenčnou osou uhol . V ustálenom stave, keď aj rotor sa točí uhlovou rýchlosťou
sa záťažový uhol nastaví na uhol , ktorý odpovedá činnému zaťaženiu generátora.
j· ·xG
.iG
0
ė
.uG
.iG
j·xT1·.iG
.uZ
.u
.i
j·( + )·xT2x.iV
.iZ

2 Statická stabilita
28
Obr. 2.7 Záťažový uhol generátora
Keď sa uhlová rýchlosť rotora líši od synchrónnej uhlovej rýchlosti , potom
zmena uhla rotora voči referenčnej osi sa vyjadrí vzťahom
∫ ( )
∫
(46)
kde je zmena uhlovej rýchlosti rotora za čas , keď na začiatku nerovnováhy
platilo . Z daného vyplýva, že zmena rýchlosti rotora spôsobuje zmenu záťažového
uhla a tým i zmenu výkonu dodávaného generátorom do sústavy. Naopak zmena odoberaného
činného výkonu sa musí spätne prejaviť na zmene záťažového uhla.
2.2.1 Synchrónny generátor s hladkým rotorom
Pre generátor s hladkým rotorom (turboalternátor) sa predpokladá konštantná
vzduchová medzera medzi rotorom a statorom po celom obvode stroja, obr. 2.8 b). Na
základe tohto, synchrónna reaktancia, je rovnaká v osi q aj v osi d to znamená .
Synchrónna reaktancia turboalternátora je
(47)
kde – je hlavná synchrónna reaktancia (reaktancia reakcie kotvy),
– rozptylová reaktancia.
a)
b)
0
q
d
x
Ė
0
j·Xad
Ė.
U i
j·X
Rİ
.UG
d
q

2 Statická stabilita
29
c)
d)
Obr. 2.8 Synchrónny generátor s hladkým rotorom; a) náhradná schéma; b) uloženie
budiaceho vinutia v rotore; c) fázorový diagram s uvažovaním odporu R; d) fázorový diagram
ak sa zanedbá odpor R;
Pre synchrónny generátor s hladkým rotorom platí napäťová rovnica
(48)
Náhradná schéma a fázorový diagram turboalternátora je zobrazený na obr. 2.8.
Ak zanedbáme rezistenciu statora generátora, potom činný výkon odoberaný zo
svoriek generátora je daný vzťahom
(49)
Obr. 2.9 Zjednodušený fázorový diagram napätí turboalternátora
Zo zjednodušeného fázorového diagramu napätí (obr. 2.9) vyjadríme činnú zložku
prúdu pomocou napätia zdroja a záťažového uhla nasledovne: pre dĺžku úsečky BC
z trojuholníka ABC platí
( ) (50)
a z trojuholníka 0BC
j·Xad·İ
j·X·İ
R·İ
.U i
Ė=Ėq
.UG
İ
G
j·Xad·İ
j·X·İ
.U i
Ė=Ėq
.UG
İ
A B
C
G
0
j·( + )Xad X
·İ
Ė=Ėq
.UG A
B
C
G
0

2 Statická stabilita
30
(51)
Porovnaním rovníc (50) a (51) dostaneme Gd EIX sincos
,
G
d
WX
EII sincos z čoho činná zložka prúdu je rovná:
(52)
Dosadením činnej zložky prúdu do rovnice (49) dostaneme vnútornú výkonovú
rovnicu generátora pri konštantnom budení
(53)
Jalový výkon Q odoberaný zo svoriek generátora je daný vzťahom
(54)
Obr. 2.10 Zjednodušený fázorový diagram napätí turboalternátora
Zo zjednodušeného fázorového diagramu napätí (obr. 2.10) vyjadríme jalovú zložku
prúdu pomocou napätia zdroja a záťažového uhla podobným spôsobom ako činnú
zložku prúdu tentoraz pomocou úsečky AB. V trojuholníkoch ABC je veľkosť úsečky AB
daná
( ) (55)
a v trojuholníku 0BC
(56)
Porovnaním rovníc (55) a (56) dostaneme pre jalovú zložku prúdu vzťah
(57)
Ė=Ėq
.UG A
B
C
G
0
j·( + )Xad X
·İ

2 Statická stabilita
31
Dosadením jalovej zložky prúdu IJ do rovnice (54) dostaneme vzťah pre výpočet
jalového výkonu generátora pri konštantnom budení
(58)
2.2.2 Synchrónny generátor s vyjadrenými pólmi
U generátorov s vyjadrenými pólmi sa vzduchová medzera medzi statorom a rotorom
mení. Zmena magnetických pomerov po obvode rotora spôsobuje, že reaktancia v pozdĺžnej
osi je väčšia ako reaktancia v osi priečnej . Synchrónne reaktancie hydroalternátora sú
(59)
kde – je hlavná synchrónna reaktancia v osi d,
– je hlavná synchrónna reaktancia v osi q,
– rozptylová reaktancia.
Pre synchrónny generátor s vyjadrenými pólmi pre prípad platí napäťová
rovnica: qqddG IXIXUE jj
(60)
Obr. 2.11 Fázorový diagram pre generátor s vyjadrenými pólmi
Fázorový diagram prúdov a napätí generátora podľa rovnice (60) je na obr. 2.11,
pričom os d je totožná s reálnou osou a os q s imaginárnou osou. Z obr. 2.11 pre jednotlivé
zložky svorkového napätia generátora UG v osiach d a q dostaneme rovnice
(61)
Komplexný zdanlivý výkon je daný vzťahom
(62)
ktorý môžeme prepísať na tvar
( ) ( )
( ) ( )
( ) (63)
Ak si rozdelíme rovnicu (63) zvlášť pre reálnu zložku a zvlášť pre imaginárnu zložku,
dostaneme rovnice pre činný a jalový výkon
Ė=Eq
.UG
İ
G
0
Id
Iq
d
j·Xd·Id
j·Xq·Iq
q
Uq
Ud

2 Statická stabilita
32
(64)
Z rovníc (61) si vyjadríme jednotlivé zložky prúdov
(65)
Pre jednotlivé zložky napätia z fázorového diagramu na obr. 2.11 platí
(66)
Dosadením rovníc (65) a (66) do rovníc (64) dostaneme
(67)
Dosadením rovnice (66) do rovnice (67) pre činný výkon P dostaneme
(
)
(
) ( )
(68)
Konečnou úpravou dostaneme vnútornú výkonovú rovnicu generátora s vyjadrenými
pólmi pri konštantnom budení
( ) (69)
Dosadením rovnice (66) do rovnice (67) pre jalový výkon Q dostaneme
(70)
Konečnou úpravou dostaneme vzťah pre jalový výkon dodávaný generátorom s
vyjadrenými pólmi pri konštantnom budení

2 Statická stabilita
33
(
) (71)
Porovnaním vzťahu (69) pre dodávaný činný výkon hydroalternátora so vzťahom (53)
pre činný výkon turboalternátora (generátora s hladkým rotorom) je vidieť, že v dodávanom
výkone generátora s vyjadrenými pólmi pribudol ďalší člen. Priebeh činného výkonu druhého
člena v závislosti na je sínusovka s polovičnou periódou. Tento člen tvorí druhú
harmonickú výkonu, volá sa reluktančný výkon a je spôsobený vyjadrenými pólmi rotora
generátora (obr. 2.12).
Obr. 2.12 Závislosť činného výkonu generátora s vyjadrenými pólmi na záťažovom uhle G
Sčítaním kriviek základnej harmonickej a druhej harmonickej dostávame výsledný
priebeh, ktorého maximum výkonu sa zvýšilo cca o 5%. Uhol maxima m sa posunul a je
menší ako 90°. Posun maxima činného výkonu pod 90° znamená, že generátory s
vyjadrenými pólmi sú náchylnejšie na stratu synchronizmu v porovnaní s generátormi s
hladkým rotorom.
Príklad 3
Hydroalternátor dodáva do siete menovitý výkon pri menovitom napätí a menovitom
účinníku. Vypočítajte vnútorné rovnice výkonov. Rezistencie zanedbajte. Počítajte v
pomerných jednotkách.
Parametre prvkov:
G1: 200 MW; 15 kV; ; ; ;
T1: 200 MVA; 15/242 kV; ;
V: dvojité vedenie, ( ) ⁄ ; ;
T2: 200 MVA; 400/231 kV; ;
P
Pmax
0° 90° 180°
m
5%
T1G T2V U
SIEŤ
UG

2 Statická stabilita
34
Riešenie
Nakreslíme si náhradnú schému obvodu:
Výpočet realizujeme v pomerných hodnotách elektrických veličín. Vzťažný výkon
zvolíme Sv = 200 MVA a vzťažné napätie Uv = 15 kV (menovitá hodnota napätia generátora –
zadaný výkon).
G:
p.j. 02,115
200
200
15
100
102
100 2
2
2
2
V
V
G
Gdd
U
S
S
Uxx
p.j. 58,015
200
200
15
100
58
100 2
2
2
2
V
V
G
Gq
qU
S
S
Uxx
T1:
p.j. 25,015
200
200
15
100
25
100 2
2
2
2
1 V
V
T
TkT
U
S
S
Uux
V:
p.j. 0881,015
200
242
1512043,0
2
1
2
12
2
2
2
1)1(
V
VTV
U
SplXx
T2:
p.j. 0966,015
200
242
15
200
231
100
6,10
100 2
22
2
2
1
2
2
V
VT
T
TkT
U
Sp
S
Uux
Náhradnú schému si môžeme upraviť do tvaru
Výsledné reaktancie sú:
p.j. 4347,00966,00881,025,021 TVT xxxx
p.j. 4547,14347,002,1 xxx ddc
p.j. 0147,14347,058,0 xxx qqc
xT1 xVxG xT2
ė
.iG
.Gu .
u
xxG
ė
.iG
.Gu .
u

2 Statická stabilita
35
Pomerná hodnota napätia generátora:
p.j. 115
15 0j0j0j eeeU
Uu
V
GG
Zdanlivý výkon generátora:
rad 4275,0 49,2491,0arccoscosarccos
p.j. 4146,0j91,01200
200 49,24j49,24jj eeeS
Ss
V
GG
Prúd generátora:
p.j. 4146,0j91,011
1 49,24j
0j
49,24j
ee
e
u
si
G
GG
Napätie na svorkách tvrdej siete:
p.j. 91,039560j8198,0
14347,0j1j
76,25j
49,24j0j
e,
eeixuu GG
Elektromotorické napätie alternátora:
p.j. 348,152780j2405,1
158,0j1j
05,23j
49,24j0j
e,
eeixue GqGq
rad 4023,0 05,23 G
rad 8298,0 54,4749,2405,23 G
Zložky prúdu generátora v osiach d a q:
p.j. 2643,0j6211,0675,054,47cos1cos 05,23j05,23jj
eeeii G
GGq
p.j. 6789,0j2889,0
738,054,47sin1sin 95,66j9005,23j90j
eeeii G
GGd
Fázorový diagram sústavy:

2 Statická stabilita
36
Indukované elektromotorické napätie alternátora:
p.j. 6549,0j5392,1673,1
675,058,0j738,002,1j1
jj
05,23j
05,23j95,66j0j
e
eee
ixixue GqqGddG
Pri uvažovaní nesymetrie rotorov generátorov platí:
2sin1235,0sin0466,12sin015,1455,1
015,1455,1
2
9,0sin
455,1
91,0673,1
2sin2
sin
2
2
qcdc
qcdc
dc xx
xxu
x
uep
2222
2
222
sin8165,0cos5695,0cos0466,1015,1
sin
455,1
cos9,0cos
455,1
91,0673,1
sincoscos
qcdcdc xxu
x
ueq
Prenosový uhol:
rad 8519,0 81,4876,2505,230 uG
Overíme si správnosť výpočtu. Výkon dodávaný do siete je:
p.j. 0201,0j91,0191,0 49,24j76,25j eeius G
.e
.uG
G
.iGq
d
j·xq·.iGq
q
.uGq
j·x·.iG
j·xq·.iG
.iGd
.iG
.u
j·xd·.iGd
.uGd
.eq
+Re
+Im

2 Statická stabilita
37
Činný výkon dodávaný do tvrdej siete pre 0 :
p.j. 91,081,482sin1235,081,48sin0466,1
2sin1235,0sin0466,1 000
p
čo odpovedá reálnej zložke zdanlivého výkonu s .
Jalový výkon dodávaný do tvrdej siete pre 0 :
p.j. 0201,081,48sin8165,081,48cos5695,081,48cos0466,1
sin8165,0cos5695,0cos0466,1
22
0
2
0
2
00
q
čo odpovedá imaginárnej zložke zdanlivého výkonu s .
2.3 Vplyv regulácie budenia na statickú stabilitu
Úvahy v predchádzajúcich častiach predpokladali konštantnú hodnotu indukovaného
elektromotorického napätia synchrónneho stroja. Tomu odpovedá taktiež konštantný budiaci
prúd. V ustálenom stave pri konštantnom zaťažení stroja môže byť tento predpoklad splnený.
Činný výkon dodávaný generátorom do sústavy sa mení podľa požiadavky
odberateľov (zaťaženie sústavy). Zmena dodávky výkonu spôsobuje zmenu dodávaného
prúdu, čím úbytok napätia na reaktancii generátora sa mení. Zmena úbytku napätia na
reaktancii generátora spôsobí zmenu napätia na svorkách generátora. Odchýlky svorkového
napätia generátora musia byť v predpísaných medziach. Dodržať svorkové napätie generátora
v predpísaných medziach vyžaduje ho regulovať v predpísaných toleranciách. Pomocou
budiaceho prúdu sa mení veľkosť fiktívneho budiaceho napätia E . Túto reguláciu napätia
bIE f je potrebné robiť tak, aby napätie na svorkách GU bolo konštantné.
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180

2 Statická stabilita
38
Keď má byť svorkové napätie generátora stále, musí byť stály výsledný magnetický
tok viazaný k vinutiu statora. Magnetický tok reakcie kotvy sa so zaťažením mení.
Podmienkou stálosti svorkového napätia je taká zmena magnetického toku budiaceho vinutia,
aby boli vykompenzované zmeny toku reakcie kotvy. Týmto spôsobom je možné dosiahnuť
stálosť svorkového napätia pomocou regulácie budiaceho prúdu.
Regulácia indukovaného napätia generátora E spôsobí zmenu priebehu krivky činného
výkonu P na záťažovom uhle . Závislosť už nebude mať sínusový priebeh. Závislosť
činného výkonu na záťažovom uhle pri konštantnom svorkovom napätí GU sa nazýva
vonkajšia výkonová charakteristika.
a)
b)
Obr. 2.13 Sústava s reguláciou budenia; a) Jednopólová schéma; b) Náhradná schéma
sústavy;
Podľa obr. 2.13 b) činný výkon dodávaný generátorom do siete nekonečného výkonu
je
sinsin3
Ek
XX
UEP
BA
(72)
kde k je konštantný súčiniteľ nezávislý na budení
BA XX
Uk
3 (73)
Fázorový diagram pre počiatočné hodnoty (označené indexom (0)
) je zobrazený na obr.
2.14 a).
Z diagramu je možné odčítať prenášaný činný výkon, pretože je to podľa vzťahu (72)
priemet napätia Ė do osi +j. Nech sa zaťaženie spočiatku zvyšuje bez zmeny budenia (obr.
2.14 b)). To znamená nárast uhla z hodnoty (0)
až po 90°, pričom hodnota napätia E je
konštantná v dôsledku stáleho budiaceho prúdu. Následkom vzrastajúceho úbytku napätia na
reaktancii stroja XA svorkové napätie klesá. Pretože 90° je hranica stability, nemôže byť tento
uhol prekročený. Odpovedajúci maximálny výkon je P (*)
. Svorkové napätie pokleslo na (*)
GU , indukované elektromotorické napätie pri konštantnej veľkosti zmenilo polohu na Ė (*)
(čo predstavuje pohyb koncového bodu jeho fázora po kružnici so stredom v počiatku
súradnicovej sústavy). Ďalšie zväčšovanie výkonu by nebolo možné. Rovnako nie je povolená
SIEŤ
EUXA=Xd
UG XBI
j·XA
Ė.
UG
İ
.U
j·XB
I. II.

2 Statická stabilita
39
prevádzka s veľkým poklesom napätia na svorkách generátora. Preto je nutné zväčšiť budenie
generátora. Predpokladáme, že budiaci prúd upravíme tak, aby napätie GU na svorkách
generátora dosiahlo pôvodnú veľkosť (obr. 2.14 c)). Tým sa koncový bod fázora GU dostane
po kružnici s polomerom )0(
GU do polohy )1(
GU . Napätie Ė sa pritom svojím koncovým
bodom presunie z polohy Ė (*)
po kolmici k osi +j (pretože sa nemení činný výkon) do polohy
Ė (1)
. Nový prevádzkový stav má uhol (1)
, ktorý je väčší než pôvodný uhol (0)
.
a)
b) c)
Obr. 2.14 Fázorový diagram sústavy pri E = konšt.
Vo všetkých prevádzkových stavoch rozdeľuje koncový bod fázora GU spojnicu
koncových bodov fázorov Ė a U na dve úsečky, ktorých vzájomný pomer je rovný pomeru
reaktancií XA a XB. Je to preto, že týmito reaktanciami prechádza rovnaký prúd. Preto je ich
pomer rovný úbytku napätí na nich. Tieto úbytku sú práve zmienené úsečky.
j·XA·İ
.U
(0)
Ė (0)
.UG
(0)
.I
(0)
j·XB·İ (0)
+j
+1
P
P (0)
0 0
j·XA·İ
.U
(0) (*)=
.U
Ė (0)
.UG
(0)
.I
(0)
j·XB·İ (0)
Ė (*)
.UG
(*)
+j
+1
P
P (0)
P (*)
0 0
j·XA·İ
.U
(0) (*) (1)= =
.U U
Ė (0)
.UG
(0)
.I
(0)
j·XB·İ (0)
Ė (*)
.UG
(*)
.UG
(1)
Ė (1)
+j
+1
(1)
P
P (0)
P (*)
= P (1)
0 0

2 Statická stabilita
40
Zmena činného výkonu stroja vyžaduje zmenu jeho príkonu. To znamená, že
v priebehu popisovaného deja je nutné meniť výkon hnacieho stroja (turbíny). Ako sme
videli, zmenou budiaceho prúdu stroja sa jeho činný výkon nemení.
Popisovaný dej môžeme sledovať i v grafe závislosti činného výkonu na záťažovom
uhle (obr. 2.15). Nárast výkonu znamená nárast uhla. Bez zmeny budenia (krivka 1) je možné
pokračovať až do bodu B, kde sa dosiahne uhol 90°. Tu sa zväčší budenie (čo znamená nárast
napätia E) a tým sa dosiahne krivka 2 s vyšším maximom. Prechod z bodu B na krivku 2
s bodom C prebieha po čiare rovnobežnej s osou , pretože sa činný výkon pri tom nemení.
Z bodu C môže dej ďalej pokračovať pri rovnakom budení až do bodu D, kde nastane znovu
zväčšenie budenia a prechod do bodu E na krivke 3. Takto môže prevádzka pokračovať až po
vrchol krivky, na ktorej už prechod na uhol menší než 90°nie je možný. Závislosť výkonu na
uhle pri takomto spôsobe regulácie budenia ja čiara ABCDEFGH. Maximálny prenášaný
výkon je podstatne väčší než výkon P (*)
.
Obr. 2.15 Závislosť fP s reguláciou
budenia s ohľadom na potlačenie
odchýliek svorkového napätia.
Obr. 2.16 Závislosť fP pri zmenách
budenia.
V reálnom prípade nie je možné zväčšovať výkon do bodu B (a v ďalších krokoch do
bodov D, F, H), pretože napätie UG už skôr klesne pod dovolenú hodnotu. Pribudenie
a prechod na krivku 2 musí nastať podstatne skôr (obr. 2.16). Pri automatickej regulácii
budenia tak dostávame takmer plynulú krivku závislosti výkonu na uhle, čo je už spomínaná
vonkajšia charakteristika (obr. 2.17). Výkon je možné zväčšovať až na hodnotu Phr, pri ktorej
vonkajšia charakteristika dosahuje uhol 90°. Predpokladom je samozrejme dostatočne
dimenzované budenie generátora, schopné dosiahnuť odpovedajúci budiaci prúd. Prevádzka
v bodoch vonkajšej charakteristiky s uhlami nad 90°je za určitých podmienok tiež možná (tzv.
umelá stabilita), v prevádzke bez dostatočne účinného regulátora budenia je to však nestabilná
oblasť.
P
0 90° 180° (0)
P (0)
1
2
3
4P
(*)
A
B
D
F
H
G
E
C
P
0 90° 180° (0)
P (0)

2 Statická stabilita
41
Obr. 2.17 Vonkajšia výkonová
charakteristika generátora
s hladkým rotorom.
Obr. 2.18 Vonkajšia výkonová
charakteristika generátora
s vyjadrenými pólmi.
Vo vzťahu (72) vystupuje reaktancia XA, ktorá predstavuje reaktanciu synchrónneho
stroja v pozdĺžnej osi. Ide teda o stroj s hladkým rotorom, alebo o stroj s vyjadrenými pólmi,
u ktorého zanedbávame vplyv premenlivej vzduchovej medzery. Ak budeme uvažovať
premenlivú vzduchovú medzeru, je nutné použiť vzťah
2sin
2sin
2
BqBd
qd
Bd XXXX
XXU
XX
UEP (74)
V tomto vzťahu je na budení závislý len prvý člen (základná harmonická výkonu), naproti
tomu druhý člen sa nemení. Vonkajšia charakteristika je spojnica bodov na vnútorných
charakteristikách pri rôznom budení. Deformácia vnútorných charakteristík a tým i posun
bodov vonkajšej charakteristiky oproti prípadu so zanedbaním druhej harmonickej výkonu sú
zjavné pri malom budiacom prúde. Pri menovitom budení je vplyv druhej harmonickej malý.
Je potrebné si však uvedomiť, že stroje s hladkým rotorom majú väčšiu hodnotu synchrónnej
reaktancie než stroje s vyjadrenými pólmi. Preto krivky vonkajších charakteristík pre obidva
typy strojov majú síce podobný tvar, ale rozdielnu veľkosť.
Ďalšia okolnosť, ovplyvňujúca tvar vonkajšej charakteristiky, je kolísanie napätia
v sieti. V predošlých vzťahoch sme napätie U považovali za stále, pretože šlo o tvrdú sieť.
V skutočných elektrizačných sústavách ideálna tvrdá sieť neexistuje a pri náraste zaťaženia
napätie U klesá. To znamená znižovanie maxima príslušných vnútorných charakteristík. Preto
skutočná vonkajšia charakteristika leží pod priebehom platným pre U = konšt. Medzný výkon,
t.j. priesečník vonkajšej charakteristiky so zvislicou v uhle 90°, taktiež klesá. Znižuje sa aj
maximum vonkajšej charakteristiky, čo má vplyv taktiež na tzv. umelú stabilitu.
Vlastnosti regulátora budenia majú na stabilitu prenosu veľký vplyv. Ďalšou
okolnosťou ovplyvňujúcou priebeh vonkajšej charakteristiky je kývanie rotora synchrónneho
stroja. Ideálny priebeh predpokladá, že sa uhol mení bez kývania. V skutočnosti nastáva po
každej zmene uhla kývanie rotora okolo uhla, na ktorom sa prevádzka ustáli po zániku
prechodného deja.
Regulácia agregátu (turbína-generátor) musí byť vykonaná v dvoch úrovniach:
1. Zo vzrastom odoberaného elektrického výkonu P zo svoriek generátora sa musí
vykonať regulácia výkonu na turbíne tak, aby bola dodržaná podmienka P = Pt.
2. Pri zvyšovaní výkonu by za normálnych okolností došlo k poklesu napätia UG na
svorkách generátora, preto musí zareagovať regulácia budenia. Pri zvyšovaní
P
Pmax
0° 90° 180°
Phr.
max
K
P
Pmax
0° 90° 180° max
K

2 Statická stabilita
42
odberu činného P sa zabráni poklesu napätia na svorkách pribudzovaním
generátora, teda zvyšovaním napätia E.
Príklad 4
Vypočítajte a graficky znázornite vonkajšiu výkonovú charakteristiku prenosu pre
sústavu podľa obrázku pri konštantnom napätí alternátora na svorkách UG = 10,5 kV a napätia
na svorkách siete U = 220 kV. Pri uvedených podmienkach zistite medzu statickej stability.
Úlohu riešte v pomerných hodnotách so zanedbaním rezistencií.
Parametre prvkov:
G1: 62,5 MW; 10,5 kV; ; ; turboalternátor;
T1: 63 MVA; 10,5/121 kV; ;
V: dvojité vedenie, ( ) ⁄ ; ;
T2: 125 MVA; 115,5/231 kV; ;
Riešenie
Nakreslíme si náhradnú schému obvodu:
Vypočítame si reaktancie všetkých prvkov obvodu. Ako vzťažné hodnoty si zvolíme
UV = 220 kV (menovité napätie siete) a SV = 100 MVA.
G:
p.j. 7946,3220
100
5,115
231
5,10
121
5,62
5,10
100
196
100 2
222
2
2
2
2
1
2
V
V
G
GdG
U
Spp
S
Uxx
T1:
p.j. 1959,0220
100
5,115
231
63
121
100
2,10
100 2
22
2
2
2
1
2
11
V
V
T
TkT
U
Sp
S
Uux
V:
p.j. 1653,0220
100
5,115
2311004,0
2
1
2
12
2
2
2
2)1(
V
VV
U
SplXx
T1G T2V U
SIEŤ
UG
u.
xT1 xV i.xG xT2
e.
SIEŤuG
.

2 Statická stabilita
43
T2:
p.j. 1147,0220
100
125
231
100
13
100 2
2
2
2
2
22
V
V
T
TkT
U
S
S
Uux
Napätie siete je konštantné a jeho pomerná hodnota je:
p.j. 1220
220
VU
Uu
Napätie na svorkách generátora:
p.j. 1,15,115
231
5,10
121
220
5,1021 pp
U
Uu
V
GG
Zjednodušená schéma obvodu:
Výsledná reaktancia obvodu:
p.j. 4759,01147,01653,01959,021 TVT xxxx
p.j. 2704,44759,07946,3 xxx GC
u.
i.xG x
e.
SIEŤuG
.

2 Statická stabilita
44
Fázorový diagram obvodu:
Vonkajšiu výkonovú charakteristiku prenosu vypočítame tak, že si postupne budeme voliť
hodnoty prenášaného výkonu p a vypočítame potrebné hodnoty.
Pre činný výkon dodávaný do siete zo svoriek alternátora platí:
000 sin3116,2sin4759,0
11,1sin
x
uup G
odkiaľ
3116,2arcsin0
p
Jalový výkon dodávaný do siete zo svoriek alternátora je:
1015,2cos3116,24759,0
1cos
4759,0
11,1cos 0
2
0
2
0
x
u
x
uuq G
Prúd dodávaný do siete je:
u
qp
u
si
j
Napätie na svorkách alternátora:
0jj
euixuu GG
u.
i.
e.
uG
.G
0j· ·
.x i
j· ·.
x iG

2 Statická stabilita
45
a bude slúžiť ako kontrola správnosti výpočtu, pretože uG = 1,1 = konšt.
Indukované elektromotorické napätie alternátora
jj eeixue C
Maximálny prenášaný výkon pri danom indukovanom elektromotorickom napätí alternátora
je:
Cx
uep
max
1. výpočet pre p = 0 p.j.:
rad 0 00arcsin3116,2
0arcsin
3116,2arcsin0
p
Jalový výkon:
p.j. 2101,01015,20cos3116,21015,2cos3116,2 0 q
Prúd dodávaný do siete je:
p.j. 2101,02101,0j01
2101,0j0j 90j
eu
qp
u
si
Napätie na svorkách alternátora:
p.j. 1,10j1,12101,04759,0j1j 0j90j eeixuuG
Indukované elektromotorické napätie alternátora
p.j. 8974,10j8974,12101,02704,4j1j 0j90j eeixue C
Maximálny prenášaný:
p.j. 4443,02704,4
18974,1max
Cx
uep
2. výpočet pre p = 0,2 p.j.:
rad 0866,0 9634,43116,2
2,0arcsin
3116,2arcsin0
p
Jalový výkon:
p.j. 2015,01015,29634,4cos3116,21015,2cos3116,2 0 q
Prúd dodávaný do siete je:
p.j. 2839,02015,0j2,01
2015,0j2,0j 29,45j
eu
qp
u
si
Napätie na svorkách alternátora:
p.j. 1,10952,0j0959,12839,04759,0j1j 9634,4j29,45j eeixuuG
Indukované elektromotorické napätie alternátora
p.j. 0471,28541,0j8604,12839,02704,4j1j 66,24j29,45j eeixue C

2 Statická stabilita
46
Maximálny prenášaný:
p.j. 4794,02704,4
10471,2max
Cx
uep
.
.
.
.
.
n. výpočet pre p = 2,3116 p.j.:
rad 5708,1 903116,2
3116,2arcsin
3116,2arcsin0
p
Jalový výkon:
p.j. 1015,21015,290cos3116,21015,2cos3116,2 0 q
Prúd dodávaný do siete je:
p.j. 1241,31015,2j3116,21
1015,2j3116,2j 28,42j
eu
qp
u
si
Napätie na svorkách alternátora:
p.j. 1,11,1j01241,34759,0j1j 90j28,42j eeixuuG
Indukované elektromotorické napätie alternátora
p.j. 69,128716,9j9742,71241,32704,4j1j 93,128j28,42j eeixue C
Maximálny prenášaný:
p.j. 9716,22704,4
169,12max
Cx
uep
Ostatné vypočítané hodnoty sú uvedené v tabuľke.
p q uG 0 e pmax
0 0,2101 1,1 0° 1,8974 0° 0,4443
0,2 0,2015 1,1 4,96° 2,0471 24,66° 0,4794
0,4 0,1753 1,1 9,96° 2,4444 44,33° 0,5724
0,6 0,1309 1,1 15,04° 2,9993 58,68° 0,7023
0,8 0,0673 1,1 20,25° 3,6509 69,35° 0,8549
1,0 -0,0173 1,1 25,63° 4,3696 77,77° 1,0232
1,2 -0,1257 1,1 31,27° 5,1454 84,84° 1,2049
1,4 -0,2620 1,1 37,27° 5,9798 91,14° 1,4003
1,6 -0,4331 1,1 43,80° 6,8852 97,09° 1,6123
1,8 -0,6511 1,1 51,14° 7,8902 103,04° 1,8477
2,0 -0,9423 1,1 59,90° 9,0604 109,50° 2,1217

2 Statická stabilita
47
2,2 -1,3918 1,1 72,12° 10,6162 117,75° 2,4860
2,3 -1,8699 1,1 84,25° 12,0525 125,42° 2,8223
2,3116 -2,1015 1,1 90,00° 12,6900 128,93° 2,9716
Vonkajšia výkonová charakteristika je zobrazená v grafe.
2.4 Kritériá statickej stability
Pri praktickom skúmaní stability je potrebné poznať závislosť činného prenášaného
výkonu na uhle . Táto závislosť fP sa obťažne zisťuje. V ľubovoľnom uzle zložitej
sústavy možno zmerať závislosť zmien činného výkonu P na napätí U (Q = konšt.) a tiež
jalového výkonu Q na napätí U (P = konšt.) pri zmenách zaťaženia. Tieto závislosti sa
podstatne jednoduchšie zisťujú pomocou elektrických prístrojov meraním.
Pre rozsah uhlov 900 možno podľa [1] dokázať, že pre staticky stabilnú
prevádzku musia byť splnené podmienky
0dU
dQ; 0
dU
dP (75)
Pochopiteľne, že sústavu nemôžeme prevádzkovať až po medzné zaťaženie uhla
90max , pretože jeho prekročenie znamená prechod do nestabilnej oblasti. Preto je v
prevádzke sústavy nutná určitá výkonová rezerva, aby pri náhodných zmenách činného
výkonu nedošlo k strate stability sústavy. Táto rezerva môže byť odvodená od niektorých
prevádzkových veličín, ako sú napätie, výkon, uhol a pod. Ak definujeme bezpečný
0
0,5
1
1,5
2
2,5
3
0 15 30 45 60 75 90 105 120 135 150 165 180
p
[°]

2 Statická stabilita
48
prenášaný výkon P0 k maximálnemu výkonu Pm pri konštantnom budení, potom koeficient
rezervy výkonu je daný vzťahom
% 1000
0
P
PPk m
p (76)
Z hľadiska stability sústavy koeficient rezervy výkonu v ustálenom stave prevádzky
nemá byť menší ako 20% (teda %20pk ). Táto podmienka znamená, že bezpečný výkon je
do mPP 83,00
alebo nie je dovolené prekročiť uhol prenosu 56max .
Pre dôležité odberové uzly sa zavádza koeficient rezervy napätia kU definovaný ako
% 100
n
kritnU
U
UUk (77)
kde Un – menovité napätie uzla,
Ukrit – kritické napätie uzla pri max. činnom prenášanom výkone (pri tomto napätí
dôjde k strate statickej stability).
Z hľadiska zabezpečovania stability hodnota koeficientu rezervy napätia kU nesmie
klesnúť pod 10% [1], čo znamená, že nkrit UU 9,0 .

3 Dynamická stabilita
49
3 DYNAMICKÁ STABILITA
Úvahy o statickej stabilite prenosu sa môžu uplatniť pri malých zmenách záťažového
uhla (pri malých kyvoch stroja). V praxi však existuje mnoho náhlych zmien stavu sústavy,
pri ktorých v dôsledku nerovnováhy dodávaného a odoberaného výkonu dosahujú zmeny
záťažového uhla veľké hodnoty. Sú to spínacie pochody (napr. vypnutie vedenia alebo
transformátora), nárazy zaťaženia a predovšetkým skraty. Zmena impedancie je v týchto
prípadoch skoková. Sústava prejde do nového stavu elektromechanickými kmitmi, pretože
zotrvačnosť rotujúcich častí nedovoľuje okamžitú zmenu prevádzkových veličín –
záťažového uhla. Skoková zmena väzobnej impedancie spôsobuje aj skokovú zmenu činného
výkonu stroja.
Dynamická stabilita sústavy zahŕňa v sebe skokovú zmenu zaťaženia činného výkonu
(zmena impedancie). Skúmaná sústava môže prejsť do nového ustáleného stavu len cez
elektromechanický prechodný jav. Pri tomto jave dôjde k rozkývaniu rotorov generátorov
okolo synchrónnej uhlovej rýchlosti. Najhorší prípad je taký, že rozkývanie rotorov spôsobí
výpadok generátorov zo synchronizmu.
Obr. 3.1 Mechanické výkony turbína - generátor
Uvažujme sústavu turbína – generátor, podľa obr. 3.1 v situácii, keď dôjde k náhlej
zmene zaťaženia činného výkonu na svorkách generátora Pel. Regulátor mechanických
otáčok, vzhľadom na vlastnú mechanickú zotrvačnosť nestačí dostatočne rýchlo zareagovať
na takúto náhlu zmenu elektrického zaťaženia. Ďalej rýchlemu pôsobeniu regulátora otáčok
bráni i hmotnosť hnacieho média (napr. uzáver vody nie je možné uzavrieť okamžite, pretože
by došlo k silným mechanickým rázom v prívodnom potrubí). Tieto skutočnosti vedú k tomu,
že mechanický príkon turbíny v priebehu prechodného elektromechanického javu môžeme
považovať za konštantný (Pt = konšt.). Tiež vplyv regulátora budenia na začiatku
prechodného javu sa obvykle zanedbáva. Pri riešení dynamickej stability sa obyčajne
predpokladá konštantná hodnota prechodného elektromotorického napätia E generátora a
rovnako sú konštantné prechodné impedancie sústavy Z . Kvalitatívne posúdenie dynamickej stability sústavy umožňuje tzv. pravidlo plôch,
pomocou ktorého sa pomerne jednoducho a názorne určuje kritická hodnota záťažového uhla
δk. V praxi je však potrebné poznať kritický čas trvania určitého poruchového stavu sústavy tk
napr. skratu. Prekročením tohto kritického času dochádza k trvalému porušeniu synchrónneho
chodu niektorých generátorov pracujúcich do ES. Na určenie hodnoty kritického času je
potrebné poznať časový priebeh záťažového uhla jednotlivých strojov, čo si vyžaduje riešiť
pohybové diferenciálne rovnice kývania rotorov synchrónnych generátorov.
Pri riešení diferenciálnej rovnice kyvu je dôležitá diferencia výkonu na pravej strane
rovnice
bt PPP (78)
Je to rozdiel mechanického výkonu turbíny Pt a odoberaného elektrického brzdného
výkonu Pb. Výsledkom riešenia diferenciálnej rovnice pre konkrétne podmienky získame
TurbínaSynchrónnygenerátor
Pel = P0
PPbPt

3 Dynamická stabilita
50
závislosť tf , teda tzv. krivku kyvu. Krivka kyvu je závislosť elektrického uhla δ medzi
rotorom generátora a synchrónnou osou magnetického poľa na čase. Zo znalosti kritického
uhla δk z krivky kyvu určíme kritický čas tk. Na základe skutočného času vypnutia poruchy tp
a kritického času tk sa rozhodne, či dôjde alebo nedôjde k narušeniu synchronizmu paralelne
pracujúcich generátorov.
3.1 Diferenciálna rovnica kyvu
Elektromechanický prechodný jav popisujeme diferenciálnou rovnicou kyvu. Pri jej
odvodení vychádzame z kinetickej energie W otáčajúcich sa častí turboagregátu alebo
hydroagregátu. Ide o časti, ktoré sú mechanicky spojené a spolu sa otáčajú (rotor turbíny s
rotorom generátora, príp. budič a ďalšie pomocné zariadenia na spoločnom hriadeli). Ak
rotujúca sústava má moment zotrvačnosti J a mechanickú uhlovú rýchlosť otáčania ωm, pre
kinetickú energiu takejto sústavy platí známy vzťah z mechaniky rotujúcich telies
rad/s ,kg.m J; 2
1 22
mJW (79)
V prípade prebytku výkonu turbíny ΔP > 0 sa uhlová rýchlosť agregátu zväčší, teda
zväčší sa kinetická energia takejto sústavy. Naopak, pri ΔP < 0, kinetická energia a uhlová
rýchlosť klesajú. Takéto zmeny energie vyjadríme nasledovne
Pdt
dW (80)
Deriváciou rovnice (80) podľa času dostaneme
dt
dJ
dt
dW mm
(81)
Porovnaním rovníc (80) a (81) získame vzťah
Pdt
dJ m
m
(82)
Uhlovú rýchlosť ωm vyjadríme ako odchýlku o Δωm od synchrónnej uhlovej rýchlosti
ω0m nasledovne
mm
mmmdt
d00
(83)
Derivovaním rovnice (83) podľa času, dostaneme uhlové zrýchlenie
2
2
dt
d
dt
d mm (84)
teda
Pdt
dJ m
m 2
2 (85)
Uhlová rýchlosť ωm je približne rovná synchrónnej uhlovej rýchlosti ω0m. Rešpektujúc
túto skutočnosť a vynásobením obidvoch strán rovnice (85) výrazom ω0m /Sn dostaneme
m
n
m
n
m
S
P
dt
d
S
J02
22
0
(86)

3 Dynamická stabilita
51
kde Sn je menovitý zdanlivý výkon generátora. Prvý zlomok v rovnici (86) predstavuje
mechanickú časovú konštantu
n
mm
S
JT
2
0 (87)
Rovnicu (86) upravíme a prejdeme na elektrické hodnoty ω0 a prenosový uhol δ (počet
polpárov p = 1), čím dostaneme
nm S
P
Tdt
d 0
2
2 (88)
Táto rovnica je základnou rovnicou kývania rotora synchrónneho generátora. Je to
diferenciálna rovnica druhého rádu.
Mechanická časová konštanta Tm súvisí s kinetickou energiou točivých častí
agregátov. Porovnaním vzťahov (79) a (87) ju môžeme chápať ako dvojnásobnú hodnotu
kinetickej energie vztiahnutú na menovitý výkon generátora. Fyzikálny význam časovej
konštanty Tm môžeme zistiť meraním. Je to čas potrebný na rozbeh nezaťaženého rotora
agregátu (Pb = 0) z nulových otáčok do menovitých otáčok, keď bude na hriadeli agregátu
pôsobiť menovitý konštantný moment Mn = Sn/ω0m.
Orientačné hodnoty mechanických časových konštánt agregátov sú uvedené v tab. 3.1.
Druh agregátu Tm [s]
Turbogenerátor s kondenzačnou turbínou 1 500 min-1
15 ÷ 24
Turbogenerátor s kondenzačnou turbínou 3 000 min-1
7 ÷ 18
Turbogenerátor s protitlakovou turbínou 3 000 min-1
6 ÷ 10
Hydroagregáty 3 ÷ 9
Asynchrónne motory cca 1 Poznámka: Väčšie hodnoty Tm z rozpätia sa použijú pre menšie výkony turboagregátov a pre
väčšie výkony hydroagregátov.
Tab. 3.1 Orientačné hodnoty mechanických konštánt Tm
Všeobecne agregáty s protitlakovou turbínou majú menšiu mechanickú časovú
konštantu v porovnaní s agregátmi s kondenzačnou turbínou. Z hľadiska stability prenosu sú
tieto agregáty citlivejšie na možnosť straty synchronizmu, čo bude ukázané neskôr. To isté
platí o agregátoch s nižšími menovitými (synchrónnymi) otáčkami. Tieto majú menšie
hodnoty Tm než agregáty s vyššími synchrónnymi otáčkami, pretože pri rozbehu sa pri
pôsobení menovitého konštantného momentu na hriadeli agregátu dosiahnu nižšie otáčky za
kratší čas.
3.2 Stabilita zložitej sústavy – náhradný generátor
Pre riešenie úloh stability používame diferenciálnu rovnicu kyvu (88). Túto rovnicu
upravíme do tvaru
eltanm PPP
dt
dST
2
2
0
(89)
kde Pa – je akceleračný výkon. Je to rozdiel mechanického výkonu na hriadeli turbíny Pt a
činného elektrického výkonu odoberaného zo svoriek generátora Pel (straty generátora
zanedbávame). V prípade viacstrojovej sústavy to znamená, že akceleračný výkon každého

3 Dynamická stabilita
52
agregátu je závislý na uhle základnej pozície a rýchlosti zmien tohto uhla. Pri n–strojovej
sústave to znamená, že je potrebné vyriešiť nasledovnú sústavu n-diferenciálnych rovníc
dt
d
dt
d
dt
dPPP
dt
dST nnuitiai
inimi
,,,,,,, 21
212
2
0
(90)
Takéto diferenciálne rovnice je potrebné napísať pre každý agregát samostatne.
Riešenie komplikuje odber činného výkonu Pui v mieste pripojenia i–teho generátora do
sústavy. Odoberaný činný výkon v každom uzle sústavy je jednak goniometrickou funkciou a
viacerých premenných základných pozícií uhlov δ a rýchlosti zmien týchto uhlov. Počet
premenných je závislý od počtu prevádzkovaných generátorov. V snahe zjednodušiť takýto
komplikovaný systém sa siaha k modelu náhrady takejto sústavy jedným ekvivalentným
generátorom, resp. náhrady aspoň jej časti. Týmto rovnica (90) sa zjednoduší do univerzálnej
ekvivalentnej rovnice nasledovne
dt
dPPP
dt
dSTutea
neme
,
2
2
0
(91)
V krajnom prípade táto úloha, pri maximálnom zjednodušení, môže prejsť do riešenia
úlohy s jedným generátorom v tvare
sin
2
2
0
mtanm PPP
dt
dST (92)
Obr. 3.2 Náhradná schéma; a) Sústava n-generátorov; b) Ekvivalentný náhradný generátor
Uvažujme s n-generátormi, ktoré sú pripojené do sústavy na prípojnici s napätím U ,
podľa obr. 3.2 a). Nech charakteristické údaje i-tého generátora sú známe, t.j. pre daný stav
poznáme fiktívne budiace napätie iE , celkovú impedanciu iZ od fiktívneho budiaceho
a)
b)
Ė1
Ż1
.I1
Ė2
Ż2
.I2
Ėn
Żn
.In
P ,1 Q T1 m1,
P ,2 Q T2 m2,
P ,n Q Tn mn,
.U
ĖŻe
.I
P,Q T, m
.U

3 Dynamická stabilita
53
napätia po prípojnicu s napätím U , menovitý výkon Pni, Qni, niS a mechanická časová
konštanta Tmi.
Určíme jednotlivé elektrické veličiny ekvivalentného generátora a spôsob ich výpočtu.
Napäťové a prúdové pomery reálnych generátorov, v súlade s obr. 3.2 a), popíšeme
nasledovnými rovnicami:
nnn IZUE
IZUE
IZUE
222
111
(93)
nIIII 21 (94)
Prúdy od jednotlivých generátorov sa určia
UEYZ
UEI
UEYZ
UEI
UEYZ
UEI
nn
n
nn
22
2
22
11
1
11
(95)
Zavedieme nasledovné vzťahy impedancií a admitancií
n
i ie ZZ 1
11
;
n
i
ie YY1
(96)
Prúd náhradného generátora
n
i
iie EYEYI1
(97)
Odkiaľ napätie E náhradného generátora sa určí
n
i
i
e
i EY
YE
1
(98)
Na základe tohto sa určí menovitý výkon náhradného generátora nasledovne
n
i
nin PP1
;
n
i
nin QQ1
; ninini QPS j (99)
Mechanická časová konštanta Tm náhradného generátora
n
i
ni
n
i
nimi
m
S
ST
T
1
1 (100)

3 Dynamická stabilita
54
3.3 Diferenciálna rovnica kyvu, prepočet na nový vzťažný výkon
Diferenciálna rovnica kyvu bola odvodená v článku 3.1. Keďže v praxi sa vyskytujú
úlohy, kde je potrebné diferenciálnu rovnicu prepočítať na nový vzťažný výkon, v ďalšom
bude ukázaný postup tejto matematickej úpravy. Elektrická uhlová rýchlosť sa vypočíta z
mechanickej uhlovej rýchlosti podľa vzťahu
mp 00 (101)
kde p – počet polpárov generátora,
ω0m – mechanická uhlová rýchlosť.
Vzhľadom na to, že výpočty stability sa vykonávajú ľahšie v pomerných veličinách,
vyjadríme urýchľujúci výkon Pa ako pomernú veličinu k zdanlivému výkonu stroja v tvare
n
aa
S
Pp (102)
Po dosadení do predchádzajúcej rovnice dostaneme
n
a
m
mm
S
P
Tdt
d 0
2
2 (103)
Ak p = 1, potom ω0m = ω0 a ε = εm tak potom
nm
va
ST
Sp
dt
d
0
2
2 (104)
Doteraz sme nepriamo uvažovali, že Sn = Sv. Ak Sv ≠ Sn, potom rovnicu je potrebné
upraviť vynásobením hodnotou v
n
S
S. Platí nasledovné:
v
n
n
a
n S
S
S
P
dt
d
S
J
02
22
0
v
n
n
a
v
n
n S
S
S
P
S
S
dt
d
S
J
02
22
0
a
v
nm p
dt
d
S
ST 02
2
(105)
teda
a
m
m pT
0 (106)
a
me
pTdt
d 0
2
2 (107)
kde Tme – ekvivalentná mechanická časová konštanta rozbehu stroja.
vv
n
nv
nmme
S
J
S
S
S
J
S
STT
2
0
2
0 (108)

3 Dynamická stabilita
55
Diferenciálna rovnica kyvu v pomerných jednotkách je vyjadrená vzťahom (107). Ak
pri praktických výpočtoch počítame uhly v stupňoch, potom
]/[ 000 18503603600 sf .
3.4 Metóda plôch pri určovaní dynamickej stability sústavy
Metódu plôch si vysvetlíme na jednoduchej sústave, podľa obr. 3.3 a). Výkon sa v
tejto sústave prenáša z generátora cez blokový transformátor dvojitým vedením do tvrdej siete
s napätím U = konšt. Náhradná elektrická schéma takejto sústavy je na obr. 3.3 b), kde
turbogenerátor z hľadiska dĺžky času trvania prechodného javu je zobrazený prechodným
elektromotorickým napätím E a prechodnou reaktanciou dX . Náhla zmena veľkosti
reaktancie je vyvolaná vypnutím jedného z dvoch paralelných vedení, čím prenos sa
uskutočňuje len jedným vedením, obr. 3.3 c). Prenos činného výkonu s dvomi paralelnými
vedeniami sa uskutočňuje podľa krivky I., obr. 3.3 d). Táto krivka v porovnaní s krivkou pre
statickú stabilitu má u dynamickej stability vyššie Pmax, napriek tomu že prechodné napätie
E je menšie ako hodnota elektromotorického napätia E, ale prechodná reaktancia dX je
podstatne menšia ako synchrónna reaktancia generátora Xd ( dd XX ).
a)
d)
b)
c) e)
Obr. 3.3 Metóda plôch skúmania dynamickej stability pri vypnutí jedného z dvoch vedení
SIEŤ
G TU
V1
P
V2
P
Pm
0° 90° 180° 0
A
B
P =Pt 0
I.
II.
P0'
P0''
1 2
C
D
E
P
P
SIEŤ
E'U
X d'
P
XT
XV
XV
SIEŤ
E' UX d'
P
XT XV

3 Dynamická stabilita
56
Vypnutím jedného z dvoch paralelných vedení sa reaktancia zväčšuje, čo pri
rovnakých napätiach E a U predstavuje krivku II., ktorá má menšie maximum prenášaného
výkonu Pmax. V bode A je rovnováha medzi dodávaným mechanickým výkonom Pt a
elektrickým výkonom Pb odoberaným z generátora pri uhle δ0. Po skokovej zmene reaktancie,
spôsobenej vypnutím jedného vedenia, sa záťažový uhol v dôsledku zotrvačnosti agregátu
nemôže zmeniť okamžite a zostáva na hodnote δ0. Zmení sa však výkon odoberaný z
generátora na hodnotu PPP b 0 , bod B, obr. 3.3 d). Odoberaný výkon 0P je menší ako
mechanický výkon turbíny Pt, ktorý považujeme za konštantný v priebehu celého
prechodného javu. Týmto dochádza k vzniku urýchľujúceho výkonu 0P , ktorý v okamžiku
vypnutia vedenia je
PPPPPPP bbt 00 (109)
Tento kladný prebytok výkonu sa prejaví zvyšovaním uhlovej rýchlosti ω generátora,
a preto uhlové zrýchlenie ε0 nadobudne veľkosť
nm
mm
S
P
Tdt
d
0
2
2
0
0
(110)
Pretože 00 P , bude i 00 , t.j. rotor generátora bude urýchľovaný. Urýchľovanie
rotora generátora znamená zväčšovanie uhla δ. Tento urýchľovací proces bude prebiehať z
bodu 0,P0B po krivke II. do bodu bP,1D , kde pri uhle δ1 elektrický výkon Pb je opäť
rovný dodávanému mechanickému príkonu turbíny Pt. Priebeh záťažového uhla δ v závislosti
na čase je na obr. 3.3 e). Pri uhle δ1 (bod D), dosiahne zmena uhlovej rýchlosti Δω maximum.
Pri ďalšom vzraste uhla nad δ1 odoberaný výkon 0P prevyšuje mechanický príkon turbíny Pt.
Brzdný výkon 0P je nasledovný
PPPPPPP bbt 00 (111)
Za bodom D je uhlové zrýchlenie záporné. Uhlová rýchlosť rotora generátora začne
klesať až na hodnotu synchrónnej uhlovej rýchlosti, bod C. Kinetická energia, ktorú rotor
agregátu získal v úseku BD, sa v úseku DC spotrebuje brzdiacim výkonom, čo sa prejaví
spomaľovaním uhlovej rýchlosti na synchrónnu uhlovú rýchlosť v bode C. V bode C
záťažový uhol δ2 dosiahne maximum, ale v tomto bode stav rovnováhy výkonov nenastane,
pretože odoberaný výkon 0P prevyšuje dodávaný mechanický príkon turbíny Pt. Rotor
agregátu je pribrzďovaný a uhol δ sa začne zmenšovať. Tento stav trvá dovtedy, pokiaľ
nedôjde k rovnováhe výkonov, t.j. záťažový uhol musí klesnúť na hodnotu δ1 (bod D). Zrejme
celý dej bude pokračovať ďalej kývaním rotora okolo rovnovážnej polohy s uhlom δ1 (bod D).
Ak prihliadneme na tlmenie, potom amplitúda kyvov sa bude zmenšovať, až sa sústava ustáli
na novom záťažovom uhle δ1 a uhlová rýchlosť na synchrónnej uhlovej rýchlosti ω. Nakoľko
sa o zachovaní stability obyčajne rozhoduje v prvom cykle kývania, kde sa vplyv tlmenia na
uhol δ prejaví nepatrne, preto sa často dynamická stabilita sústavy posudzuje so zanedbaním
tlmenia.
Podmienka zachovania dynamickej stability, vyjadrená ako hraničný prípad, je daná
nasledovným integrálom
02
0
Pd (112)

3 Dynamická stabilita
57
Z obr. 3.3 d) je zrejmé, že tento integrál predstavuje vyšrafovanú plochu. Interval
uhlov δ0 až δ2 môžeme rozdeliť na dva intervaly δ0, δ1 a δ1, δ2. Výkon ΔP má podľa vzťahu
(111) záporné znamienko na intervale δ1 až δ2. Integrál (112) môžeme upraviť do tvaru
2
1
1
0
PdPd (113)
Ľavá strana rovnice, podľa obr. 3.3 d), predstavuje vyšrafovanú plochu ABDA, ktorá
je označená znamienkom (+), t.j. urýchľujúca plocha. Pravá strana znamená šrafovanú plochu
DCED označenú (–), tzv. brzdiaca plocha. Takto sa dostávame k pravidlu plôch, kde
rovnováha na hranici stability je vyjadrená rovnosťou plôch urýchľujúcej S+ a brzdiacej S
–.
Podmienkou stabilnej prevádzky pri náhlej zmene zaťaženia je nerovnosť
SS (114)
Z tejto podmienky plôch vyplýva, že pri dynamickom elektromechanickom
prechodnom jave smie záťažový uhol δ prekročiť i hodnotu 90° bez straty stability. Hranicou
stability (pri maximálnom uhle δ2) je kritický uhol δ1 = δk, ktorý vyjadruje rovnosť plôch
S+ = S
–. Pri statickej stabilite hraničný uhol statickej stability je uhol 90 . Z tohto dôvodu
bolo zavedené označenie záťažového uhla rozdielne pre statickú a dynamickú stabilitu.
Priebehy výkonov a krivka kyvu pre nestabilný prípad prenosu výkonu podľa obr.
3.3 a) je uvedená na obr. 3.4 a) a obr. 3.4 b). Na prvý pohľad je zrejmé, že brzdiaca plocha je
menšia v porovnaní s plochou urýchľujúcou. Po prekročení uhla δ2 bude mať výkon ΔP znovu
kladnú hodnotu. To znamená neustály vzrast uhla δ, obr. 3.4 b), výsledkom je strata
synchronizmu. Príčinou straty stability je v tomto prípade veľký prenášaný činný výkon P0,
ktorému odpovedá veľký prenosový uhol δ0. S rastúcou hodnotu P0 sa pri rovnakých
podmienkach urýchľujúca plocha S+ zväčšuje a brzdiaca plocha S
– sa zmenšuje. V takejto
sústave tiež existuje hraničný výkon, pri ktorom platí S+ = S
–. Ďalšie zväčšovanie prenášaného
výkonu vedie v prípade vypnutia jedného z vedení k strate dynamickej stability a k rozpadu
sústavy.
a) b)
Obr. 3.4 Priebehy výkonov a krivka kyvu pri strate synchronizmu
Táto hodnota hraničného výkonu je obyčajne tak veľká, že ju nemôžeme preniesť
vzhľadom k iným obmedzeniam, napr. statická stabilita, zachovanie dynamickej stability pri
skratoch vzhľadom na rýchlosť vypnutia skratu ochranou, prúdové zaťaženie vodičov a pod.
P
0° 90° 180° 0
P =Pt 0
I.
1 2
II.
0° t
0
1
2
90°

3 Dynamická stabilita
58
Z tohto dôvodu takto určený hraničný výkon nie je obvykle kritériom prenosovej schopnosti
sústavy.
Príklad 5
Z hľadiska dynamickej stability rozhodnite, či prenos ostane stabilný po vypnutí
jedného z dvoch paralelných vedení. Použite metódu rovnosti plôch. Počítajte v pomerných
hodnotách za predpokladu, že zanedbáte rezistenciu.
Parametre prvkov:
G: 137,5 MVA; 13,8 kV; % 7,24dx
T1: 125 MVA; 13,8/121 kV; % 5,12ku
V: dvojité; /4,01 X km; km 200l
T2: 125 MVA; 115,5/231 kV; % 13ku
Riešenie
Všetky impedancie je potrebné prepočítať na jednu napäťovú hladinu, napr. na svorky tuhej
siete, pričom si zvolíme vzťažné hodnoty Uv = 220 kV a Sv =100 MVA.
G:
p.j. 2174,0220
100
5,115
231
8,13
121
5,137
8,13
100
7,24
100 2
222
2
2
2
2
1
2
v
v
G
GdG
U
Spp
S
Uxx
T1:
p.j. 121,0220
100
5,115
231
125
121
100
5,12
100 2
22
2
2
2
1
2
11
v
v
T
TkT
U
Sp
S
Uux
V:
p.j. 3306,0220
100
5,115
2312004,0
2
1
2
12
2
2
2
2)1(
v
vaV
U
SplXx
p.j. 6612,0220
100
5,115
2312004,0
2
2
2
2
2)1(
v
vbV
U
SplXx
T2:
p.j. 1147,0220
100
125
231
100
13
100 2
2
2
2
2
22
v
v
T
TkT
U
S
S
Uux
Napätie, výkon a prúd:
p.j. 1220
220 0j0j0j eeeU
Uu
v
T1G T2V U = 220 kV
SIEŤ
P = 100 MWcos = 0,95

3 Dynamická stabilita
59
19,1895,0arccos cosarccos
p.j. 0526,13287,0j195,0100
100
cos
19,18j19,18jj
0
eeeS
Ps
v
p.j. 13287,0j1ReRe 00 sp
p.j. 0526,13287,0j11
0526,1 19,18j
0j
19,18j
0
e
e
e
u
si
a) Prenos oboma vedeniami:
Výsledná impedancia obvodu:
p.j. 7836,01147,03306,0121,02174,02 1 TavTGa xxxxx
Napätie zdroja:
p.j. 4817,17836,0j2576,10526,17836,0j1j 93,31j19,18j eeixue a
Prenášaný výkon:
sin8909,1sin7836,0
14817,1sin
a
ax
uep
b) Prenos jedným vedením:
Výsledná impedancia obvodu:
p.j. 1142,11147,06612,0121,02174,02 1 TbvTGb xxxxx
Prenášaný výkon:
sin3299,1sin1142,1
14817,1sin
b
bx
uep

3 Dynamická stabilita
60
Na obrázku sú zobrazené závislosti činných výkonov na záťažovom uhle pre oba prípady
prenosu.
Na výpočet stability sústavy je potrebné určiť záťažové uhly, ohraničujúce urýchľujúcu
a brzdnú plochu:
93,318909,1
1arcsinarcsin
00
amp
p
76,483299,1
1arcsinarcsin
01
bmp
p
24,13176,48180180 12
Veľkosť urýchľujúcej plochy:
p.j. 0418,093,31cos76,48cos3299,193,3176,481180
coscos180
cos180
sin180
01 010
0 01
0
1
0
1
0
1
0
bm
bmbm
pp
ppdpdpS
Veľkosť brzdnej plochy:
p[p.j.]
pm b
pa
pb
p0
[°el]
S
S
0 1 2
pm a

3 Dynamická stabilita
61
p.j. 3138,076,4824,1311180
76,48cos24,131cos3299,1
180coscos
180cos
180sin
12012
0 0 2
1
2
1
2
1
2
1
pp
ppdpdpS
bm
bmbm
Keďže platí nerovnosť SS , možno konštatovať, že vypnutím jedného z paralelných
vedení nedôjde k narušeniu stability.
3.5 Metóda plôch pri určovaní dynamickej stability sústavy pri
trojfázovom skrate, kritický uhol
Z hľadiska dynamickej stability podstatne väčšie nebezpečenstvo pre ohrozenie
stability sústavy predstavujú skraty a to z dôvodu, že dochádza k podstatne väčším náhlym
zmenám prenášaného činného výkonu. Veľkosť tejto zmeny činného výkonu závisí na mieste
a druhu skratu. Pri trojfázových kovových skratoch prenášaný výkon klesá až na nulovú
hodnotu. Odľahčenie generátorov pri skratoch je v porovnaní s prípadom vypnutia jedného z
paralelných vedení podstatne vážnejšou zmenou výkonu v sústave, ktorá môže ohroziť
dynamickú stabilitu sústavy.
Obr. 3.5 Trojfázová prenosová sústava s trojfázovým skratom na vedení V2
a) b)
Obr. 3.6 Dynamická stabilita pri trojfázovom skrate; a) Priebehy výkonov pre jednotlivé
stavy prevádzky; b) Krivky kyvu;
Predpokladajme sústavu podľa obr. 3.5, kde na jednom z paralelných vedení vznikne
trojfázový skrat. Označíme si výslednú reaktanciu pre prípad bezporuchovej prevádzky XI,
reaktanciu s trojfázovým skratom XII a reaktanciu X
III, keď poškodené vedenie je vypnuté.
SIEŤ
G T1 UV1
V2
T2
P
0° 90° 180° 0
P =Pt 0
I.
III.
1
2
II.
vyp
Pm
III.
Pm
I.
Pm
II.
P'0
A
BC
D
E
0° t
0
1
2
k
tk
1
2
3

3 Dynamická stabilita
62
Maximá výkonových charakteristík, obr. 3.6 a), budú vo vzťahu IIIIII
mmm PPP .
Väzobná impedancia (a tým i maximum krivky II.) závisí na mieste a druhu skratu. V prípade
trojfázového skratu na začiatku vedenia by bol prenášaný výkon vedením nulový ( 0II mP ),
pretože reaktancia XII by bola veľmi veľká (X
II → ∞). Tým by sa výkonová charakteristika II.
na obr. 3.6 a) zmenila na úsečku ležiacu v osi δ.
Analogicky priebeh prechodného javu môžeme vysvetliť pomocou pravidla plôch, obr.
3.6 a). Vznik skratu znamená pokles odoberaného výkonu z bodu A do bodu B. Uhol δ začne
narastať po krivke II. Pri uhle δvyp dôjde k vypnutiu skratu na vedení ochranou. Toto znamená
prechod z bodu C do bodu D a ďalšie zvyšovanie uhla δ po krivke III. Pokiaľ uhol δ
neprekročí bod E na charakteristike III., nedôjde k narušeniu dynamickej stabilitu. Na hranici
stability uhol dosiahne hodnotu δ2 (bod E). Časové priebehy uhlov na čase (krivky kyvov) sú
uvedené na obr. 3.6 b). Krivka 1 znázorňuje stabilný prípad s rešpektovaním tlmenia v sústave
(S+ < S
–), krivka 2 predstavuje priebeh na hranici stability (S
+ = S
–) a priebeh 3 je nestabilný
(S+ > S
–). Uhol δ1 predstavuje uhol, na ktorom sa ustáli prevádzka po doznení
elektromechanického javu pri vypnutom vedení s poruchou, t.j. vzniku nového rovnovážneho
stavu. Hodnotu kritického uhla δk na hranici stability (pri rovnosti S+ = S
–) môžeme podľa
obr. 3.7 určiť z nasledovného stavu
dPPdPP
k
k
mm 2
1
sinsin III
0
II
0 (115)
Obr. 3.7 Kritický uhol pri rovnosti plôch
Riešenie rovnice (115) dáva veľkosť kritického uhla
IIIII
0
II
2
III
020 coscos180arccos
mm
mm
kPP
PPP
(116)
Uhly vo vzťahu (116) sú vyjadrené v stupňoch. Skrat musí byť vypnutý najneskôr
vtedy, keď záťažový uhol dosiahne hodnotu kritického uhla δk. Prekročením uhla δk (vypnutie
za čas t > tk ) znamená, že plocha S+ > S
–, čo spôsobí výpadok generátora zo synchronizmu.
P
0° 90° 180° 0
P =Pt 0
I.
III.
2
II.
k
Pm
III.
Pm
I.
Pm
II.
P'0

3 Dynamická stabilita
63
Príklad 6
V sústave podľa obrázka je prenášaný činný výkon 100 MW pri 8,0cos . Zistite
kritický uhol ak na začiatku jedného z dvoch paralelných vedení vznikne 3-fázový kovový
skrat a poruchové vedenie bude vypnuté. Počítajte presnou metódou v pomerných hodnotách
so zanedbaním rezistencií.
Parametre prvkov:
G: 137,5 MVA; 13,8 kV; % 7,24dx
T1: 125 MVA; 13,8/121 kV; % 5,12ku
V: dvojité; /4,01 X km; km 200l
T2: 125 MVA; 115,5/231 kV; % 13ku
Riešenie
Všetky impedancie je potrebné prepočítať na jednu napäťovú hladinu, napr. na svorky tuhej
siete, pričom si zvolíme vzťažné hodnoty Uv = 220 kV a Sv =100 MVA.
G:
p.j. 2174,0220
100
5,115
231
8,13
121
5,137
8,13
100
7,24
100 2
222
2
2
2
2
1
2
v
v
G
GdG
U
Spp
S
Uxx
T1:
p.j. 1210,0220
100
5,115
231
125
121
100
5,12
100 2
22
2
2
2
1
2
11
v
v
T
TkT
U
Sp
S
Uux
V:
p.j. 6612,0220
100
5,115
2312004,0
2
2
2
2
2)1(
v
vV
U
SplXx
T2:
p.j. 1147,0220
100
125
231
100
13
100 2
2
2
2
2
22
v
v
T
TkT
U
S
S
Uux
Napätie, výkon a prúd:
p.j. 1220
220 0j0j0j eeeU
Uu
v
87,368,0arccoscosarccos
p.j. 75,0j125,18,0100
100
cos
87,36j87,36jj
0
eeeS
Ps
v
T1G T2V U = 220 kV
SIEŤ
P = 100 MWcos = 0,8

3 Dynamická stabilita
64
p.j. 175,0j1ReRe 00 sp
p.j. 75,0j125,11
25,1 87,36j
0j
87,36j
0
ee
e
u
si
I. Prenos oboma vedeniami pri bezporuchovej prevádzke:
Výsledná impedancia obvodu:
p.j. 7836,01147,02
6612,01210,02174,0
221I T
vTG x
xxxx
Napätie zdroja:
p.j. 7705,17836,0j5877,125,17836,0j1j 27,26j87,36j
I
eeixue
Prenášaný výkon:
sin2595,2sin7836,0
17705,1sin
I
I
x
uep
II. Trojfázový kovový skrat:
Pri trojfázovom skrate je výsledná impedancia medzi alternátorom a sieťou nekonečne veľká.
Vzťah pre prenášaný činný výkon je:
0II p
III. Prenos jedným vedením po vypnutí skratu:
Výsledná impedancia obvodu:
p.j. 1142,11147,06612,01210,02174,021III TvTG xxxxx
Prenášaný výkon:
sin5891,1sin1142,1
17705,1sin
III
III
x
uep
Na obrázku sú zobrazené závislosti činných výkonov na záťažovom uhle pre všetky tri
prípady prenosu.
Na výpočet stability sústavy je potrebné určiť záťažové uhly, ohraničujúce urýchľujúcu
a brzdnú plochu:
27,2626,2
1arcsinarcsin
I
00
mp
p
39589,1
1arcsinarcsin
III
01
mp
p
14139180180 12

3 Dynamická stabilita
65
Veľkosť urýchľujúcej plochy:
00000180180180180 0
00
kppdpdpS k
kk
Veľkosť brzdnej plochy:
kkmm
mm
pppp
dpdpdpdpS
kk
kkkk
202
III
0
III
0
III
0
III
180coscos
180cos
180sin
180sin
22
2222
Pre kritický uhol musí platiť:
SS
kkmk ppp
202
III
00180
coscos180
kkmmk pppppp
020
III
2
III
000180180
coscos180180
20
III
2
III
00180
coscos180
pppp kmm
00202
IIIIII
180180coscos
pppp mkm
180
coscos 0202
IIIIII ppp mkm
p[p.j.]
pI
p0
[°el]
S
S
0 k2
pm
I
pm
III
pIII
pII
1

3 Dynamická stabilita
66
12,615891,1
18027,261411141cos5891,1
arccos
180cos
arccosIII
0202
III
m
m
kp
pp
3.6 Metóda číselného integrovania (metóda postupných intervalov)
Pravidlo plôch je dobrou pomôckou pre posúdenie výsledného stavu, do ktorého sa
sústava dostane po ukončení prechodného javu. Nedáva však úplný obraz o priebehu javu.
Pravidlo plôch nemožno použiť v prípade keď sa u prvkov sústavy uvažuje i s rezistanciou.
Pre potreby praxe je potrebné poznať kritický čas trvania skratu tk a časový priebeh
niektorých veličín (uhla δ, urýchľujúceho výkonu, uhlovej rýchlosti, otáčok agregátu a pod.).
K tomuto je potrebné riešiť diferenciálnu rovnicu kývania rotora generátora (88) alebo (107)
pre konkrétny prípad:
nm S
P
Tdt
d 0
2
2 alebo a
me
pTdt
d 0
2
2
Z matematiky sú známe rôzne metódy riešenia diferenciálnych rovníc tohto typu.
V elektroenergetike sa často používa metóda číselného integrovania, tzv. metóda postupných
intervalov. Táto metóda spočíva v rozdelení spojitého prechodného javu na diskrétny proces,
prebiehajúci v časových intervaloch rovnakej dĺžky t, ktoré postupne na seba nadväzujú.
Urýchľujúci výkon v intervale t pokladáme za konštantný , a preto na intervale je konštantné
uhlové zrýchlenie rotora a uhlová rýchlosť .
Potrebujeme riešiť rovnicu
inm PP
dt
dST
02
2
0
alebo i
me ppdt
dT 02
2
0
kde pre najjednoduchší prípad je
imi PP sinIIII
Metóda postupných intervalov spočíva v rozdelení spojitého prechodného javu na
diskrétny proces v intervaloch ∆t. Na intervale ∆t bude ε = konšt. a ∆P = konšt., pričom ω a
∆P počítame so strednými hodnotami, kde ω predstavuje okamžitú uhlovú rýchlosť vyjadrenú
vzťahom
dt
d 0
Sledujme priebeh prechodného javu podľa obr. 3.8.

3 Dynamická stabilita
67
Obr. 3.8 Metóda číselného integrovania
Výpočet na 1. intervale:
1. tt 11
Urýchľujúci výkon je
00
II
0 sin PPPP ma .
Tento výkon spôsobí konštantné uhlové zrýchlenie.
2. Uhlové zrýchlenie na konci prvého intervalu bude
00
1 PST nm
.
Pretože uhlová rýchlosť lineárne narastá
0
011 P
ST
tt
nm
,
zmena uhla ∆δ1 je úmerná zmene uhlovej rýchlosti ∆ω1S, ktorá je daná vzťahom
3. 222
0 00111
P
ST
t
nm
S
4. Tu predpokladáme pôsobenie výkonu 0PPa na celom intervale. Z dôvodu presnosti je
potrebné uvažovať so stredným výkonom
22
0 001
PPP S
P
t
P0
P
P0
P1P2
0 1 2
A
B
PI
PII
P0
P1
P2
1 2 3
P2S
P1S
P3S
t1 2 3
1
2
3
t1 2 3
0
1
2
3
1
2
3
1S
2S
3S
0 0

3 Dynamická stabilita
68
5. Zmena uhla ∆δ1 na 1. intervale :
22
0
2
0111
P
ST
ttt
nm
S
Tento výraz stredný výkon už obsahuje, preto vplyv bodu 4. na tomto intervale sa
neprejaví.
6. Veľkosť uhla na konci 1. intervalu ∆t je:
101
Výpočet na 2. intervale:
1. tt 22
Urýchľujúci výkon je 11
II
0 sin PPPP ma .
2. 1
01 P
ST nm
.
3. Analogicky možno písať pre
2
102
P
ST
t
nm
S
4. Priemerný výkon na druhom intervale bude
2
102
PPP S
5. Zmena uhla ∆δ2 na 2. intervale :
2
10
2
021212
PP
ST
tttt
nm
SS
Použitie stredného výkonu znamená dosadiť za ∆P0 hodnotu P2S, čím dostaneme
111
2
00
2
0110
2
02
222PKP
ST
tP
ST
tPPP
ST
t
nmnmnm
kde
nm ST
tK
2
0
6. Výsledný uhol na konci 2. intervalu je:
212
Zovšeobecnenie pre i-ty interval:
Z riešenia diferenciálnej rovnice kývania rotora vyplýva, že v čase t = t dôjde
k prírastku záťažového uhla
2
01
PK
pre i = 1
a celkový záťažový uhol na konci prvého intervalu je
101
Pre i-tý časový interval celkový čas bude t = i∙t a prírastok záťažového uhla

3 Dynamická stabilita
69
11 iii PK pre i = 2, 3, 4, ..., n
kde
nm ST
tK
2
0
pričom 0 – je uhlová synchrónna rýchlosť,
t – zvolený časový interval (obyčajne t = 0,05 s alebo 0,1 s),
Tm – mechanická časová konštanta,
Sn – menovitý zdanlivý výkon generátora.
a
imi PPP sinII
0
Celkový záťažový uhol na konci i-tého intervalu je
iii 1
Príklad 7
Načrtnite krivku kyvu rotora generátora po vypnutí jedného z dvoch paralelných
vedení. Počítajte v pomerných hodnotách za predpokladu, že zanedbáte rezistenciu.
Parametre prvkov:
G: 137,5 MVA; 13,8 kV; % 7,24dx ; s 7mT
T1: 125 MVA; 13,8/121 kV; % 5,12ku
V: dvojité; /4,01 X km; km 200l
T2: 125 MVA; 115,5/231 kV; % 13ku
Riešenie
Všetky impedancie je potrebné prepočítať na jednu napäťovú hladinu, napr. na svorky tuhej
siete, pričom si zvolíme vzťažné hodnoty Uv = 220 kV a Sv =100 MVA.
G:
p.j. 2174,0220
100
5,115
231
8,13
121
5,137
8,13
100
7,24
100 2
222
2
2
2
2
1
2
v
v
G
GdG
U
Spp
S
Uxx
T1:
p.j. 1210,0220
100
5,115
231
125
121
100
5,12
100 2
22
2
2
2
1
2
11
v
v
T
TkT
U
Sp
S
Uux
V:
p.j. 6612,0220
100
5,115
2312004,0
2
2
2
2
2)1(
v
vV
U
SplXx
T1G T2V U = 220 kV
SIEŤ
P = 100 MWcos = 0,8

3 Dynamická stabilita
70
T2:
p.j. 1147,0220
100
125
231
100
13
100 2
2
2
2
2
22
v
v
T
TkT
U
S
S
Uux
Napätie, výkon a prúd:
p.j. 1220
220 0j0j0j eeeU
Uu
v
87,368,0arccoscosarccos
p.j. 75,0j125,18,0100
100
cos
87,36j87,36jj
0
eeeS
Ps
v
p.j. 75,0j125,11
25,1 87,36j
0j
87,36j
0
ee
e
u
si
I. Prenos oboma vedeniami:
Výsledná impedancia obvodu:
p.j. 7836,01147,02
6612,01210,02174,0
221I T
vTG x
xxxx
Napätie zdroja:
p.j. 7705,17836,0j5877,125,17836,0j1j 27,26j87,36j
I
eeixue
Prenášaný výkon:
sin2595,2sin7836,0
17705,1sin
I
I
x
uep
II. Prenos jedným vedením:
Výsledná impedancia obvodu:
p.j. 1142,11147,06612,01210,02174,021II TvTG xxxxx
Prenášaný výkon:
sin5891,1sin1142,1
17705,1sin
II
II
x
uep
Krivky prenosu výkonu sú na nasledujúcom obrázku:

3 Dynamická stabilita
71
Na výpočet krivky kyvu je potrebné určiť záťažový uhol pri ustálenej prevádzke s dvoma
vedeniami:
27,2626,2
1arcsinarcsin
I
00
mp
p
Časový interval pre číselné integrovanie zvolíme Δt = 0,05 s. Konštantu K pre výpočet uhlov
v stupňoch (radiánoch) vypočítame:
675,45,1377
10005,050360 22
0
nGm
V
ST
StK
Postupne vypočítame prírastky uhlov a uhly v jednotlivých časových úsekoch. Počiatočný
stav je:
s 00 t
27,260
Výpočet na 1. intervale:
1i
s 05,005,0111 tt
p.j. 297,027,26sin589,11sin 0
II
00 mppp
69,0
2
297,0675,4
2
01
pK
96,2669,027,26101
Výpočet na 2. intervale:
2i
p[p.j.]
pI
p0
[°el]
0 2
pm
I
pm
II
pII
1

3 Dynamická stabilita
72
s 10,005,0222 tt
p.j. 280,096,26sin589,11sin 1
II
01 mppp
00,2280,0675,469,0112 pK
96,2800,296,26212
Výpočet na 3. intervale:
3i
s 15,005,0332 tt
p.j. 231,096,28sin589,11sin 2
II
02 mppp
08,3231,0675,400,2223 pK
04,3208,396,28323
Ostatné vypočítané hodnoty sú zobrazené v nasledujúcej tabuľke:
i t [s] Δp[p.j.] Δδ [°] δ [°]
0 0 0 0 26.27
1 0.05 0.297 0.69 26.96
2 0.10 0.280 2.00 28.96
3 0.15 0.231 3.08 32.04
4 0.20 0.157 3.81 35.85
5 0.25 0.069 4.14 39.99
6 0.30 -0.021 4.04 44.02
7 0.35 -0.104 3.55 47.57
8 0.40 -0.173 2.74 50.31
9 0.45 -0.223 1.70 52.01
10 0.50 -0.252 0.52 52.53
11 0.55 -0.261 -0.70 51.83
12 0.60 -0.249 -1.87 49.96
Krivka kyvu rotora generátora je na nasledujúcom obrázku:

3 Dynamická stabilita
73
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.825
30
35
40
45
50
55
t [s]

4 Zabezpečenie stability ES
74
4 ZABEZPEČENIE STABILITY ES
4.1 Statická stabilita
Rozhodujúcim ukazovateľom je, aby sa do miesta spotreby preniesol dojednaný výkon
P a odberateľské napätie U bolo konštantné. Výkonová rovnica prenosu bude
sin
dcX
UEP (117)
Nakoľko P = konšt. a U = konšt., potom
sinkonšt. dcX
E
U
P (118)
Statickú stabilitu možno v sústave udržať na prijateľnej miere:
Zmenou záťažového uhla ,
Zmenou budiaceho napätia E,
Zmenou reaktancie Xdc.
V praxi pri pomalých zmenách výkonu P možno statickú stabilitu zabezpečiť:
1. Zmenou budiaceho napätia E. Pri tejto metóde nárast uhla zväčšením výkonu P
kompenzujeme nárastom budiaceho napätia E, čím sa udržuje i konštantné napätie U
u odberateľa.
2. Cesta znižovania Xdc je obtiažna. Znižovanie Xd samotného generátora nie je možné
(vyžaduje zmenšiť veľkosť vzduchovej medzery). Reaktanciu transformátora XT možno
znížiť zmenou uk, čo povedie k veľkým skratovým prúdom. Z toho dôvodu sa volia
kompromisy. Na vedeniach sa robí pozdĺžna (sériová) kompenzácia (zmena Xdc) ale tiež u
odberateľov pomocou synchrónnych kompenzátorov (SK) tzv. priečna kompenzácia
(regulácia U).
Obr. 4.1 Sériová (pozdĺžna) kompenzácia vedenia a priečna kompenzácia u odberateľa
pomocou SK
RV = 0, XC = 0,4∙XV. Priečna kompenzácia pomocou SK, resp. paralelná kompenzácia
pomocou kondenzátorov je z hľadiska uhla nevýrazná.
SIEŤ
110 kVXLXC
400 kV
SK
I
ISK

4 Zabezpečenie stability ES
75
a) b)
Obr. 4.2 Fázorový diagram pri sériovej (a) a paralelnej (b) kompenzácii
4.2 Dynamická stabilita
4.2.1 Vplyv premenlivej vzduchovej medzery SG na dynamickú stabilitu
Ide o stroj s vyjadrenými pólmi. Pre dynamickú stabilitu platí vzťah:
2sin
2sin
2
qd
qdG
d
G
XX
XXU
X
UEP (119)
Uplatňujú sa prechodné reaktancie i napätia. Prechodná reaktancia v pozdĺžnej osi d je
menšia ako v priečnej osi q (približne platí dqq XXX , teda 14,0 qX a 4,02,0 dX
). Na základe tohto platí 0 qd XX teda druhý člen je záporný.
Obr. 4.3 Posun uhla δ doprava, 90max
Týmto sa urýchľujúca plocha zmenší a brzdiaca plocha sa zväčší. Je to priaznivý vplyv
na dynamickú stabilitu. Pretože výpočty s rešpektovaním premenlivej vzduchovej medzery sú
komplikovanejšie, často sa rozdiel dX a qX zanedbáva.
j·XC·İ
.U
Ė
İ
j·XL·İ
Ė
Re
Im
.U
Ė
İ
j·XL·İ
Re
Im
İSK
İSK
Ė
P
0° 90° 180°
P0
I.II.
max

4 Zabezpečenie stability ES
76
Okrem priaznivého vplyvu druhej harmonickej na SG s vyjadrenými pólmi existujú
ďalšie nepriaznivé okolnosti.
Časová konštanta Tm je menšia u SG s vyjadrenými pólmi voči SG s hladkým rotorom.
Dôvod, stroje s vyjadrenými pólmi majú podstatne menšie synchrónne otáčky preto
HRVP MM TT .
nm ST
P
dt
d
00
2
2 ;
nm ST
tK
2
0 (120)
teda Tm je nepriamo úmerné uhlovému zrýchleniu ε. Preto uhol δ za rovnakých podmienok
narastá rýchlejšie pri malej hodnote Tm, teda 11 iii PK pre i = 2,3.....n.
Z tohto vyplýva, že synchrónne generátory s vyjadrenými pólmi v porovnaní s
turboalternátormi sú náchylnejšie na vypadnutie zo synchronizmu pri elektromechanických
prechodných javoch. Preto je potrebné venovať zvýšenú pozornosť dynamickej stabilite
prenosu zo vzdialených vodných elektrární.
4.2.2 Rezistancia v sústave
Zanedbanie odporu R alternátorov a transformátorov je možné vždy bez výrazného
ovplyvnenia výsledkov riešenia. Prítomnosť R pôsobí priaznivo i na dynamickú stabilitu,
pretože vznikajúce činné straty výkonu zaťažujú SG. Pri skratoch tieto straty spôsobia menšie
odľahčenie generátora a tým je i menší urýchľujúci výkon. Vplyv R je veľmi dôležitý na
prenosových vedeniach väčších dĺžok.
4.2.3 Vplyv skratov na dynamickú stabilitu sústavy
Máme prenosovú sústavu podľa obr. 4.4. Na vedení V2 tesne za vypínačom vznikol
skrat (ďalej sa bude kresliť ako keby bol na prípojnici).
Obr. 4.4 Prenosová sústava so skratom na vedení V2
Z hľadiska prenosu budeme mať sústavu podľa obr. 4.5.
Obr. 4.5 Náhradná schéma sústavy
Parametre jednotlivých prvkov budú: 0R , 1Tda XXX , 22 TVb XXX .
V normálnej prevádzke rovnica prenosu výkonu bude
sinsin12
X
UE
XX
UEP
ba
(121)
SIEŤ
G T1 UV1
V2
T2
SIEŤ
E' U
P
Xa Xb

4 Zabezpečenie stability ES
77
Jednofázový skrat
Obr. 4.6 Náhradná schéma a úpravy obvodu pre jednofázový skrat
20
12XX
XXXXX ba
ba
KZ
ZZZZZ 21
2112
20 ZZZK (122)
(117)
Dvojfázový skrat so zemou
Obr. 4.7 Náhradná schéma a úpravy obvodu pre dvojfázový skrat so zemou
20
2012
XX
XX
XXXXX ba
ba
20
20
XX
XXZK
(123)
Xa Xb
S2
K1
K2
K0
S0
X2
X0
S1
Xa Xb
X2
X0
Z1
Zk
Z2
Xa Xb
S2
K1K2 K0
S0
X2 X0
S1
Xa Xb
X2 X0

4 Zabezpečenie stability ES
78
Dvojfázový skrat bez zeme
Obr. 4.8 Náhradná schéma a úpravy obvodu pre dvojfázový skrat bez zeme
2
12X
XXXXX ba
ba
(124)
Typy skratov:
1 – jednofázový,
2 – dvojfázový,
2.1 – dvojfázový so zemou,
3o – trojfázový oblúkový,
3 – trojfázový kovový
Obr. 4.9 Priebeh činného výkonu pri jednotlivých typoch skratov
Trojfázový skrat
Prestáva spojenie medzi generátorom a tuhou sieťou. Všetok výkon z generátora sa
spotrebuje v mieste skratu a preto
0sin12
X
UEP (125)
Nakoľko 0 , 0E , 0U potom 12X .
Z porovnania jednotlivých typov skratov pre reaktanciu X12 zistíme nasledovné:
Xa Xb
S2
K1K2
X2
S1
Xa Xb
X2
P
0° 90° 180°
P =Pt b
1
2
2.1
3o
3

4 Zabezpečenie stability ES
79
2020
20
2
3,12
11
XXXX
XX
XX f
(126)
Výkonové charakteristiky pre rôzne typy skratov sú na obr. 4.9. Najťažší skrat pre
dynamickú stabilitu je trojfázový skrat, pretože synchrónny generátor sa najviac odľahčí
(najväčší urýchľujúci výkon).
1,2,1.2,3, kritkritkritkrit (127)
Ak zvolíme za základnú poruchu pre výpočet kritickej času trvania skratu tk trojfázový
skrat, potom dynamická stabilita ostáva zachovaná pri všetkých iných typoch porúch. Čas
nastavenia ochrany t0 < tk,3f. Ak zvolíme za kritický čas sústavy tk,1f (jednofázový skrat),
potom pri všetkých iných poruchách ako jednofázový skrat dôjde k strate synchronizmu
generátorov. Na dynamickú stabilitu má značný vplyv regulácia budenia => E , E ≠ konšt. a
tiež regulácia otáčok (zmena Pt).
4.2.4 Vplyv činnosti automatiky OZ na dynamickú stabilitu
Opätovné zapínanie (OZ) sa používa na vonkajších vzdušných vedeniach. V prípade
vzniku skratu (prechodná porucha na vedení) stačí vedenie na obidvoch koncoch naraz
vypnúť a po beznapäťovej pauze cca 300 ms znovu zapnúť a prevádzka sa obnoví (úspešné
OZ). Neúspešné OZ je, keď sa vedenie po beznapäťovej pauze zapína do skratu. Činnosť
automatiky znázorníme na nasledujúcom obrázku.
Obr. 4.10 Činnosť úspešného OZ na vedení
201
tk tBP
t t1 k = t = 0 t t2 OZ =
1. vyp. zap.

4 Zabezpečenie stability ES
80
Obr. 4.11 Vplyv úspešného OZ na dynamickú stabilitu sústavy
Pri úspešnom OZ činnosť automatiky má pozitívny vplyv na dynamickú stabilitu.
Neselektívne vypnutie (Distančná ochrana v rýchlom čase vypínacej charakteristiky.)
ms 100801 vvvok tttt
Cyklus OZ t2 = tOZ
BPvvvoBPkOZ tttttt
Neúspešné OZ
vvvok ttt 2 (uplatní sa časový článok)
4.2.5 Dynamická stabilita v praxi
Medzu dynamického výkonu označíme maximálne elektrické zaťaženie generátora
(elektrárne), prípadne sústavy, pri ktorej náhla porucha ešte neznamená stratu dynamickej
stability.
V praxi sa robí prieskum dynamickej stability a to vyvolaním úmyselného
prechodného javu. Pri tomto sa skúma, či ani jeden generátor resp. elektrárne nevypadnú zo
synchronizmu. Taký prechodný jav, ktorý nezaviní nikde stratu synchronizmu ani odopnutie
odberateľa je potom stav z hľadiska dynamickej stability dobre zvládnutý. Pri každom
rozbore je potrebné zohľadniť činnosť regulácie budenia na dynamickú stabilitu. Dynamickú
stabilitu možno zabezpečiť, ak
1001001
0
max
1
dP
dP
ke (128)
Vypadnutie zo synchrónneho chodu môže nastať:
1. skrat sa odpojil neskoro, δkr je také veľké, že sa stabilita nedá udržať,
2. prenáša sa veľký výkon nezodpovedajúci parametrom prenosovej sústavy. (P0 – pri
vrchole sínusovky),
P
0° 90° 180°
P =Pt b
1
3
2
20 1 3

4 Zabezpečenie stability ES
81
3. väzbové podmienky prenosu sú veľmi slabé (veľké X12) => charakteristika prenosu je
veľmi plochá, obr. 4.12.
Obr. 4.12 Maximálny výkon prenosu Pmax je nízky
P
0° 90° 180°

5 Literatúra
82
5 LITERATÚRA
[1] Kolcun, M., Chladný, V., Varga, L.: Počítačová analýza elektrizačných sústav.
Mercury-Smékal 2003, s. 119-153, ISBN 80-89061-65-6
[2] Mešter, M.: Analýza hraničných podmienok stability elektrizačnej sústavy pri rôznych
typoch poruchových stavov. Dizertačná práca. Školiteľ Vladimír Chladný. Košice, 2004.
128 s.
[3] Kolcun, M. a kol.: Analýza elektrizačnej sústavy. In.: TU Košice a ABB Elektro, s.r.o.,
Košice, 2005. časť III., s. 321-410. ISBN 80-89057-09-861-65-6
[4] Chladný, V., Bilička, M.: Prechodné javy v elektrizačných sústavách (príklady). 1. vyd.
Rektorát Technickej univerzity v Košiciach, 1991. ISBN 80-7099-095-3
[5] Trojánek, Z., Hájek, J., Kvasnica, P.: Přechodní jevy v elektrizačních soustavách.
SNTL/ALFA Praha, 1987.
[6] Kimbark, E. W.: Power system stability. John Wiley & Sons, New York, 1988.
[7] Weedy, B.M.: Electric power systems. Second Edition, John Wiley & Sons, New York,
1972. ISBN 0-471-92445-8
[8] Electric Power Engineering Handbook. Second Edition, Taylor & Francis Group, 2007,
ISBN 0-8493-9291-8
[9] Anderson, P. M.: Power System Protection (IEEE Press Series on Power Engineering).
The institute of electrical and electronics engineers, 1998. ISBN 0-7803-3427-2
[10] Machowski, J., Bialek, J., Bumby, J.: Power System Dynamics and Stability. 1st
Edition, John Wiley & Sons, 1997, ISBN 0-471-95643-0
[11] Pavella, M., Murthy, P. G.: Transient Stability of Power Systems: Theory and Practice.
John Wiley & Sons, 1994, ISBN 0-471-94213-8
[12] Kundur P.: Power System Stability and Control. McGraw-Hill Professional, 1993, ISBN
0-07-035958-X

NÁZOV: Úvod do stability prenosu elektrickej energie
AUTOR: Džmura Jaroslav
VYDAVATEĽ: Technická univerzita v Košiciach
ROK: 2012
NÁKLAD: 50 ks
ROZSAH: 82 strán
ISBN: 978-80-553-1184-5
9 788055 311845