1
UVOD
KIBERNETIKA je nauka o upravljanju.
Kibernetika je počela da se razvija posle drugog svetskog rata. Veoma brzo se
razvila i danas pokazuje veliki uticaj na metode istraživanja i načine rešavanja praktičnih
zadataka u najrazličitijim oblastima nauke i tehnike. U osnovi kibernetike leži ideja o
mogućnosti opšteg prilaza u razmatranju procesa upravljanja u sistemima različite
prirode.
Rađanje kibernetike vezano je sa objavljivanjem knjige Norberta Vinera pod
nazivom ''Kibernetika ili upravljanje i komunikacija kod živih bića i mašina'' (1948).
U njoj su prvi put jasno pokazani putevi stavranja opšte teorije upravljanja.
Takođe, su postavljene osnovne metode proučavanja problema upravljanja kao i veze za
različite sisteme sa zajedničke tačke gledišta.
Kibernetika ne proučava upravljanje sistemima u statičkom stanju, već u
njihovom kretanju i razvoju, tj. pročava dinamčke sisteme.
DINAMIČKI SISTEM je sistem koji u toku vremena menja svoje stanje.
Promena stanja sistema u vremenu naziva se proces.
Kada govorimo o upravljanju mislimo na upravljanje procesom ili, što je isto, na
upravljanje dinamičkim sistemom.
Kibernetika, kao nauka o upravljanju, izučava samo upravljane sisteme. Jedna
od katrakterističnih osobina upravljanjog sistema je sposobnost da menja svoje kretanje,
da prelazi u različita stanja pod uticajem raznih dejstava
Na primer, automobil može da zauzme različite položaje u prostoru, može da se
kreće u različitim pravcima i sa različitom brzinom, a u zavisnosti od toga kako se njme
upravlja.
Proces kretanja aviona od jednog aerodroma sdo drugog je proces kojim se
uprtavlja..
Sistem upravljanja se sastoji od upravljajućeg sistema i upravljanog sistema.
TEORIJA SISTEMA razvila se u više pravaca:
- Opšta teirija sistema
- Matematička teorija sistema
- Složeni sistemi.
Inžinjeri, ekonomisti i stručnjaci drugih profila nailaze na zadatke čije rešavanje
zahteva sistemski prilaz.
Teorija sistema se može interpretirati kao šitra oblast od teorije upravljanja.
Međutim, u praksi analiza sistema je skoro uvek povezana sa problemima upravljanja.
Po svojoj suštini teorija sistema je multidisciplinarnog karaktera (uključuje
različite oblasti nauka). Ona je podjednako korisna inženjerima, ekonomistima i
stručnjacima drugih profila.

2
Teorija sistema ne može da zameni specijalizovana znanja neophodna u svakom
datom slučaju, ali je vrlo korisna kao platforma za integralno sagledavanje okvira u
koima se javljaju realni zadaci urravljanja.
Istorijski gledano teorija upravljanja je u velikoj meri generalizacija znatno
prostijeg problema projektovanja regulatora koji je danas rešen.
Opšta teorija upravljanja je mnogo šira. Postoji veliki broj upravljačkih problema
u industriji, ekonomici, poslovnim sistemima, transportu, javnim službama gde je cilj
upravljanja znatno složeniji nego kod regulacije. U svakom takvom slučaju treba rešiti
upravljački zadatak imajući u vidu postavljeni cilj. Zajednička crta upravljačkih zadataka
u raznim oblastima tehnike, ekonomije i raznim organizacijama nije isti cilj već
optimalno odlučivanje u odnosu na usvojeni kriterijum.
SISTEM je skup entiteta (npr. ljudi i mašina) između kojih postoje interaktivne
veze da bi se postigao jedan ili više ciljeva.
Vozilo, električni motor, avion, i dr su primeri sistema.
Sistem ima dva svojstva:
1. Međusobne veze između komponenti koje su sardžane unutar sistema.
2. Granice sistema koje dele komponente unutar sistema od komponenti
okruženja.
ZNAČAJ INFORMACIJE U PROCESU UPRAVLJANJA
Električni signal nosi informaciju. Kod dinamičkih sistema brzina selekcije
optimalne odluke treba da odgovara trenutku stanja objekta. Ako to nije slučaj dolazi do
greške.
Opis kompletnog upravljačkog zadatka zahteva poznavanje sledećih elemenata:
1. Objekat iupravljanja
2. Cilj upravljanja
3. Ograničenja
4. postupak za selekciju optimalne odlike
5. Usklađivanje dinamike odlučivanja sa dinamikom objekta.
Svi gore navedeni elementi su neophodni za formiranje praktičnog upravljačkog zadatka.
Ako bilo koji od njih nije odredjen, vrednost donete odluke može biti lišena svakog
smisla.
Kod dimnamičkih sistema brzina selekcije optimalne odluke mora da odgovara
trenutnom stanju objekta. Zakasnele odluke, donete na osnovu prevaziđenog stanja
sistema, najčešće donose više štete nego koristi. Stoga, problem optimalnog upravljanja
uvek podrazumeva realno vreme, odnosno, usklađivanje vremena selekcije optimalne
trajektorije i dinamike kretanja sistema.

3
Smisao optimalnog upravljanja je sledeći: upravljanje dinamičkom sistemom
znači prevođenje objekta iz nekog početnog u zadato stanje. Uvek postoji neki skup
kretanja iz koga se vrši izbor kretanja kome se daje prednost ako se govori o upravljanju
sistemom. Gde nema izbora tamo nema upravljanja. Međutim, ako su svi putevi
prevođejnja objekta iz početnog u krajnji položaj ekvivalentni, teško je govoriti o
upravljanju.
Postoje tri osnovne kategorije upravljanja sa stanovišta apriorne informacije o
objektu:
1. Najprostiji slučaj za formalnu teoriju predstavlja situacija kada je informacija o
dinamici objekta unapred data, poznata i nepromenljiva. Sve raspoložive analitičke
metode projektovanja upravljančkih sistema bave se uglavnom ovom vrstom problema.
2. U drugu kategoriju spadaju zadaci sa nedovoljnom apriornom informacijom.
Na početku upravljanja se ne raspolaže sa kompletnom informacijom o dinamici objekta
ili se ona menja tokom upravljanja. Kod ovih zadataka postavlja se pred upravljački
sistem dvostruki zadatak. Sa jedne strane treba odabrati optimalnu trajektoriju u realnom
vremenu, a sa druge strane mora se tokom upravljanja prikupljati dodatna informacija o
objektu i na osnovu toga menjati polazni model. U ovom slučaju govori se o adaptivnom
upravljanju.
3. Treća kategorija upravljačkih problema rešava se pod uslovima prekomerne
informacijwe o objektu. Radi se o složenim sistemima čije se kompletno stanje opisuje
velikim brojem koordinata. Ova vrsta zadataka predstavlja najteži slučaj za formalnu
teoriju upravljanja. Informaciona barijera koja sprečava upravljača da prati u realnom
vremenu dinamiku složenog sistema ne može da se savlada principom povretne sprege.
Stoga se upravljanje mora organizovati na više nivoa. Viši nivoi upravljanja primaju
samo selektivne podatke od nižih nivoa. Kod složenih sistema problem je još teži jer
podsistemi imaju sve osobine jedne celine, uključujući lokalne ciljeve. Tako se pored
višenivojskog upravljanja pojavljuje problem dekompozicije na podsisteme, problem
agregacije podsistema u složene celine i problem koordinacije.
UPRAVLJANJE sistemom znači sledeće:
1. Osmotriti stanje sistema;
2. Porediti realno stanje sistema sa željenim stanjem;
3. Na osnovu rezultata poređenja doneti odluku;
4. Delovati na sistem u pravcu smanjenja razlike između realnog i željenog stanja.
Na primer: Vozač automobila predstavlja upravljajući sistem, a njegov automobil
upravljani sistem, odnosno proces kretanja automobila duž puta.
U datom slučaju, vozač osmatra stanje automobila, odnosno brzinu kretanja i
pravac kretanja automobila, kao promenljive stanja, poredi realno stanje sa željenim,
donosi odluku i deluje na papučicu za gas, odnosno na kočnicu u cilju postizanja željene
brzine, i na volan u cilju postizanja pravca kretanja.
Isti proces upravljanja prisutan je i u drugim slučajevima, kao na primer kod
upravljanjea kretanjem aviona, upravljanja poslovnim sistemima.

4
U opšem slučaju proces upravljanja sastoji se iz sledeća četiri elementa:
1. Dobijanje informacija o zadacima upravljanja;
2. Dobijanje informacija o rezultatima upravljanja tj. o ponašanju objekta
upravljanja;
3. Analiza dobijenih informacija i donošenje upravljačkih odluka;
4. Izvršenje upravljačke odluke, tj. ostvarenje upravljačkih dejstava.
Ova četiri elementa predstavljanju osnov svakog upravljanja.
Ukoliko isključimo jedan od četiri navedena elementa, tada upravljanje nije moguće.
Na prinmer, ako zavežemo oči vozaču, ili ruke, tada upravljanje automobilom nije
moguće.
Za realizaciju procesa upravljanja potrebno je imati:
1. Izvor informacija o zadacima i rezultatima upravljanja;
2. Uređaj za analizu dobijenih informacija na bazi koje će biti donete odluke;
3. Izvršni uređaj kojim se ostavruje upravljanje objektom.
Kao što se može videti:
- upravljenja nema bez informacije
- u procesu upravljanja važnu ulogžu igra vreme.
Na primer, u procesu vožnje automobilom, vozač mora na vreme da osmotri stanje
sistema, na vreme da odluči tj. na vreme da izvrši odluku.
Pri upravljanju važnu ulogu ima vreme, tj. brzina odvijanja upravljačkih operacija.
Međutim, u mnogim slučajevima čovek kao upravljajući sistem nije u stanju da
blagovremeno i tačno uzvršava izvesna upravljačka dejstva. U takvim slučajevima u
znatnoj meri pomažre nam elektronika, koja velikom brzinom obradjuje dobijene
informacije i omogućava adekvatno izvršavanje upravlačkih dejstava.
Savrermena elektronska sredstva koriste se u automatizaciji upravljanja procesima.
Pomoću njih se vrši automatizacija osmatramnja, automatizacija dobijanja informacija,
automatizacija prenosa informacija, automatizacija obrade podataka, automatizacija
izvršenja i dr.
Promenljiva kojom se upravlja često nije električna veličina. U tom slučaju, u procesu
automatizacije, prinenom elektronskih sredstava ona se pretvara u električnu veličinu,
koja se naziva električni signal.
Pored pretvarača neelektrične veličine u električni signal, razlikujemo i druge
električne sisteme (pojačavači, uobličavači i drugi elektronski sistemi vezani za prenos
električnih signala na daljinu i obradu električnih signala).
Električni signal nosi informaciju.

5
Oblast elektronike kojom se prenosi informacija na daljinu naziva se telekomunikacije.
Telekomunikacije, pored prenosa govora i slke, obuhvataju i:
- telemerenja
- telesignalizaciju
- teleupravljanje
VRSTE UPRAVLJANJA
Postoje tri vrse upravljanja, a to su:
1. PROGRAMSKO (NEAUTOMATSKO) UPRAVLJANJE – upravljajne koje
obezbeđuje unapred zadati zakon promene stanja objekta, pri čemu se ne vodi
računa o rezultatima upravljanja (npr. semafor).
2. POLUAUTOMATSKO UPRAVLJANJE – upravljanje koje se realizuje
kombinacijom čovek – mašina (računar), tada svaki učesnik radi svoj deo posla,
pri čemu čovek u interakciji sa računarom odlučuje.
3. AUTOMATSKO UPRAVLJANJE – upravljanje koje se ostavruje odgovarajućim
uređajima, bez neposrednog učešća čoveka (npr. autopilot)
Definicije pojmova koji se odnose na upravljajnje
sistemom
Upravljana promenljiva je veličina koja se meri. to je izlaz sietema, y(t).
Upravljajuća veličina,u(t), je veličina koja se modifikuje od strane kontrolera,
to je ulaz sistema.
Upravljanje se odnosi na merenje vrednosti upravljane promenljive sistema i na
promenu upravljajuće promenljive u cilju korekcije devijacije izmerene vrednosti od
željene vrednosti.
Proces je neprekidna operacija ili razvoj označen sa nizom uzastopnih promena
koje slede jedna za drugom na relativno fiksan način i vode ka posebnom cilju.
Proses je bilo koja operacija koja bi bila upravljana.
Sistem je kombinacija komponeneti koje dejstvuju zajedno i izvršavaju neki cilj.
Sistem nije ograničen samo na fizički sistem. Koncept sistema se može primeniti na
apstraktni dinamički fenoimen takav kao što se često sreće u ekonomiji.

6
Pojam sistema treba da bude interpretiran da obuhvati kako tehničke, tako i
fizičke, biološke, saobraćajne , složene sisteme i dr.
Poremećaj je signal koji teži da utiče suprotno na vrednost izlaza sistema.
Ako je poremećaj generisan unutar sistema. tada se on naziva interni, dok je
eksterni poremećaj generisan (spolja) izvan sistema i on je na neki način jedan od ulaza u
sistem.
NAČINI UPRAVLJANJA
U globalu postoje dve vrste upravljanja:
1. Upravljanje sistemima u otvorenoj sprezi
Ovi sistemi upravljanja šematski se mogu prdstaviti na sledeći način:
Ulaz ili upravljanje, u(t), je izabrano u zavisnosti od zadatih ciljeva, vezano za
analizirani sistem i svih apriornih (prethodnih) saznanja o sistemu. Ulaz u(t) nije
podvrgnut uticaju od strane izlaza y(t) (Ovaj način upravljanja karakteriče nezavisnost
ulaza od izlaza). Nedostatak ovakve vrste upravljanja je taj da ako dođe do poremećaja u
sistemu oni ne mogu da se otklone, pa izlaz sistema (odziv) neće se ponašati onako kako
se očekuje.
Primer: raskrsnica.
Zakon
upravljanja Sistem u(t) ciljevi
poremećaj
y(t)
ulaz

7
Zakon
upravljanja
Primer: Sistem zagrevanja vode(kao primer sistema i otvorenoj sprezi).
Ovde je kontroler prekidač koji određuje kada je grejač ukljućen u cilju zagrevanja vode
na neku specificiranu temperaturu.
Svakog dana zagrevanje vode nije strogo definisano, ono zavisi od jačine struje, od
dužine perioda zagrevanja, od ambijetalne okoline i dr.
2. Upravljanje sistemima sa povratnom spregom
Sistemi upravljanja sa povratnom spregom mogu se prikazati na sledeći način:
Kod sistema sa povratnom spregom upravljanje u(t) je na neki način
modifikovano informacijom o ponašanju izlaza sistema. Ulaz u(t) je podvrgnut uticaju od
strane izlaza y(t).
Kontroler (Prekidač)
Grejač
Rezervoar
ulaz
Informacije (Uključeno/isključeno)
Zagrevanje Zagrejana voda
izlaz
ulaz (dotok vode)
Sistem u(t) ciljevi
y(t)
poremećaj
senzori
greška merenja
ulaz

8
Sistemi sa povratnom spregom su u stanju da savladaju neočekivane poremećaje oko
dinamike ponašanja sistema.
Sistem sa povratnom spregom je onaj sistem kod koga je ulaz funkcija izlaza.
Ovi sistemi uglavnom koriste računare koji se nalaze unutar sistema čija je uloga da
modifikuju dinamike sistema u cilju dobijanja zadovoljavajućeg odziva sistema.
Blok šema ovih sistema se može prikazati i na sledeći način:
Proces kojim se upravlja naziva se sistem.
Senzor meri odziv sistema koji se zatim poredi sa željenim odzivom. Razlika tih signala
inicira dejstvo koje rezultuje da stvarni odziv bude približno jednak željenom odzivu, i
time se razlika signala približava nuli.
Ukoliko je ulaz sistema jednostavno razlika željenog i stvarnog odziva tada nastaje
neprihvatljivi odziv sistema. Stoga je potrebno da razlika signala bude filtrirana pomoću
drugog fizičkog sistema koji se naziva KOMPENZATOR (drugi naziv za kompezator
jeste KONTROLER ili jednostavno FILTAR).
Jedan od važnih problema vezano za upravljanje sistemom jeste specifikacija
KOMPENZATORA.
Primer: Upravljanje saobraćajrm na raskrsnici kao sistemom sa povratnom
spregom.
Kontroler Kompenzator
Filtar
Sistem
Senzor
Razlika signala ulaz
Izlaz (stvarni odziv)
+
Željeni odziv (referentni
signal)

9
Primer: zagrevanje vode kao sistem sa povratnom spregom.
Sistem grejanja vode može se pretrvoriti u sistem sa povratnom spregom, tako što ćemo
meriti temperaturu vode (izlaz) i taj signal (merenje) vratiti natrag i na taj način če uticati
na kontroler, tako što će modifikovati informaciju prekidača (uključeno/isključeno)
Kada se dese varijacije u performansi zbog modifikacije sistema ili promene u uslovima
ambijenta, efekat na izlazu sistema biće redukovan zbog prisustva povratne sprege. To
znači da je sistem sa povratnom spregom manje osetljiv na variajacije koje su zavisne od
različitih uslova.
Kao primer sistema sa povratnom spregom posmatraćemo
slučaj pilota koji prizemljuje avion.
ovde je sietem - avion
Ulazi u sistem su manipulacije pilota.
Pilot je senzor, sa svojim osećajem ravnoteže itd.
Željeni odziv je zamisao pilota da ostvari željenu putanju leta.
Kompenzacija je naćin na koji pilot koriguje uočene greške u putanji aviona.
Kod ovog sistema, od strane pilota izvršavaju se sledeće funkcije:
kompenzacije,
senzora
genertisanje željenog odziva.
Kontroler (Prekidač)
Grejač
Rezervoar
ulaz
Informacije (Uključeno/isključeno)
Zagrevanje Zagrejana voda
izlaz
ulaz (dotok vode)
termometar

10
Očigledno je da kompenzacija mora da bude funkcija dinamike sitema, tj. aviona.
Takođe, senzor može da bude odgovarajući merni instrument, a da se funkcija
kompenzacije izvršava pomoću računara.
Sistem poseduje odgovarajuću dinamiku i mi programniramo računar tako da on oponaša
dunamiku iste prirode kao što ima i sistem.
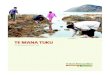
Sistem automatskog prizemljenja aviona prikazan je na sledećoj slici:
Slika 1. Sistem automatsko prizemljenja aviona
Sistm se sastoji iz tri glavna dela:
Avion
Radarska jedinica
Upravljačka jedinica.
Za vreme funkcionisanja ovog sistema upravljanja radarska jedinica meri aproksimativno
vertikalne i bočne položaje ( nagib i naginjanje) aviona, koji se onda prenose
upravljačkoj jedinici. Na osnovu tih merenja upravljačka jedinica izračunava
odgovarajuće komande visine (nagiba) i bočni položaj (naginjanje), koje se zatim
prenose do autopilota (aviona), a koje ustvri iniciraju saglasno tome „odgovor“ aviona.
Upravljačka jedinica ovde je računar. Sistem bočnog upravljanja koji upravlja bočnim
položajem aviona (naginjanjem) i sistem vertikalnog upravljanja koji upravlja visinom
aviona (nagibom), su nezavisni (dekuplovani , razdvojeni) sistemi.
Komanda naginjanja je ulazno dejstvo samo na bočni položaj aviona, a komanda nagiba
je ulazno dejstvo samo na visinu aviona.

11
1.
KLASE
SISTEMA
SISTEMI SA RASPODELJENIM PA
RAMETRIMA
(za opis se koriste parcijalne
diferncijalne jednačine)
SISTEMI SA KONCENTRISANIM
PARAMETRIMA (za opis se koriste obične
diferencijalne jednačine ili algebarske
jednačine)
STOHASTIČKI SISTEMI
(sadrše parametre koji se
opisuju odgovarajućom
raspodelom verovatnoća)
DETERMINISTIČKI SISTEMI
( njihovo ponašanje u budućnosti je
potpuno odredjeno)
VREMENSKI
KONTINUALNI SISTEM
(opisuju se diferencijalnim
jednačinama; promenljive
stanja se menjaju
kontinualno u vremenu)
VREMENSKI
DISKRETNI
SISTEMI (opisuju se
diferencnim
jednačinama;
promenljive stanja se
posmatraju u
određenim trenucima
vremena)
NELINEARNI SISTEM
(jedna ili više elementarnih
jedančina je nelinearna)
LINEARNI SISTEM (sve
elementarne jedančine su
linearne. Važi princip
superpozicije)
VREMENSKI
NEPROMENLJIVI (sve
elementarne jednačine se mogu
opisati skupm vrednosti
konstantnih parametara. To je
sistem čije karakteristike ne
variraju sa vremenom)
VREMENSKI PROMENLJIVI
(jedan ili više parametara varira
sa vremenom prema poznatom
zakonu promene)
NEHOMOGENI SISTEMI
(postoje ulazna dejstva)
HOMOGENI SISTEMI
(nema ulaznih dejstava)
KLASIFIKACIJA
SISTEMA

12
LINEARNI SISTEM
Pojam linearnosti sistema se može objasniti pomoću principa superpozicije.
Ako svi ulazi deluju istovremeno tada je odziv y(t) tog sistema jednak sumi odziva
svakog ulaznog signala koji deluje pojedinačno.
NELINEARNI SISTEM je onaj kod kog ne važi ovaj princip superpozicije. Svi
sistemi su po prirodi nelinearni. Ipak, kod većine sistema moguće je izvršiti linearizaciju.
MATEMATIKI MODELI SISTEMA. MODELIRANJE SISTEMA
Veza između realnog sistema i matematičke teorije je proces MODELIRANJA.
Jedan od prvih koraka u bilo kom upravljačkom zadatku je razvoj matematičkog modela.
Modeliranje sistema znači uspostavljanje veze između realnog sistema i moedela.
Matematički model sistema predstavlja opis procesa na osnovu koga se mogu
donositi zaključci o nekim aspektima ponašanja originala sprovođenjem formalne
procedure nad njenim opisom. Služi za proveru šta će se desiti kada upravljamo na neki
način jer nema mogućnosti eksperimentisanja. Matematički modeli su različitog oblika:
diferencijalne jedančine, grafovi, jednačine prelaza iz jednog stanja u drugo, algebarske
jedančine i dr.
Modeli sistema se mogu razvijati pomoću dva različita metoda :
1. ANALITIČKO MODELIRANJE – sastoji se u primeni osnovnih fizičkih zakona
vezano za komponente sistema i međusobnih veza između njih.
2. EKSPERIMENTALNO MODELIRANJE – na osnovu merenja ulazno – izlaznih
podataka utvrđuje se matematička relacija pomoću koje se vrši aproksimacija
(fitovanje) dobijenih merenih podataka; određuje se kriva koja verodostojno
predstavlja podatke
Linearni
sistem
u1(t) y1(t)
SISTEM u1(t)
u2(t)
u3(t)
n
i
i tyty1
)()(
ulaz izlaz (odziv)
1. u1(t) y1(t)
2. u2(t) y2(t)
3. )(22)(11 tuCtuC )(22)(11 tyCtyC
SISTEM JE LINEARAN

13
Definisanje granice sistema
Kod posmatranja sistema mora se definisati granica koja razdvaja sistem od okruženja.
PRIMER:
Proizvodni proces možemo prikazati na sledeći način:
Porudžbine mogu da budu ulaz iz okruženja (/porudžbine su ekserna promenljiva)
Ako želimo da ispitamo efekat reklamnih oglasa, u tom slučaju porudžbine su interna
promenljiva.
sistem merenje
merenje
okruženje sistem
granica
Proizvodni
sistem
izlaz
sistem
okruženje
porudžbine
EKSTERNA PORUDŽBINA
Odgovor
na reklame
Proizvodni
sistem porudžbine
izlaz
cena reklame
INTERNA PORUDŽBINA
izlaz ulaz
Spoljašni efekti
Sistem

14
Skica analitičkog prilaza za modeliranja
Pri rešavanju ovakvih problema potrebno je uraditi sledeće: Cilja modela → definisanje
granica → definisanje strukture sistema → specifikacija promenljivih koje su od interesa
→ razvoj matematičkog opisa za svaki element sistema →- primena odgovarajućih
fizičkih zakona → manipulisanje jednačinama → konačni oblik matematičkog modela →
analiza i poređenje sa realnim sistemom → modifikacija modela ako je potrebno.
VRSTE MODELA
U izučavanju sistema koriste se više vrsta modela.
Ta podela najpre je na fizičke i matematičke modele.
1. Fizički modeli zasnivaju se na nekoj analogiji.
2. matematički modeli koriste simboličku notaciju i matematičke jednačine za
predstavljanje sistema.
Fizički i matematički modeli se dele na statičke i dinamičke.
3. Statički modeli prikazuju vrednosti atributa sistema kada je on u ravnoteži.
4. Dinamički modelui predstavljaju sisteme čije se stanje menja u toku vremena.
Dalja klasifikacija bila bi na determinističke i stohastičke modele.
5. Deterministički modeli opisuje ponašanje sistema kako u prošlosti, tako u
sadašnjosti i u budućnosti.
6. Stohastički modeli su modeli na osnovu kojih možemo odrediti ponašanje
sistema u prošlosti, ali ne možemo u sadašnjosti i u budućnosti. Stofhastički
karakter vezan je za postojanje slučajnih faktora kako u samom objektu, tako i
u njegovom okruženju.
A
B
C
SISTEM
Podsistemi između kojih
postoji veza

15
7. Simulaciomi modeli Ukolko se sistemi ne mogu rešavati samo pomoću analitičkih i numeričkih
metoda onda se pribegava simulaciji sistema, koja se uglavnom realizuje na
računaru. Simulacioni modeli mogu da budu svrha sami sebi. tj. da se pomoću
njih ispituje ponačanje sistema.Takođe, simulacioini modeli mogu da posluže
kao baza za primenu nekih drugih metoda vezano za anlizu ponašanja sistema,
bez ekperimentsanja na realnom sistemu.
JEDNAČINE ZA OPIS SISTEMA. VRSTE JEDNAČINA
Zakoni fizike definišu relacije između fundamentalnih veličina i obično se
prdedstavljanaju pomoću odgovarajućih jednačina.
Skalarna verzija II Njutnovog zakona (sila inercija) glasi da ako je sila veličine f
primenjena na masu od M jedinica, tada se ubrznje mase (a) povezuje sa silom, na
osnovu jednačine:
f = Ma
Sa druge starne, Omov zakon glasi da ako se napon veličine u priključi na otpornik R
tada je struja i kroz otpornik povezana sa naponom jednačinom
u = Ri
Jedna klasa jednačina koja ima široku primenu u opisivanju fizičkih zakobna jesu
diferencijalne jednačina.
Postoje obične i parcijalne diferencijalne jednačine.
1. Obične diferencijalne jedančine (sadrže jednu ili više zavisno promenljivih, ali
imaju samo jednu nezavisnu promenljivu i jedan ili više izvoda zavisno
promenljive po nezavisno promenljivoj)
)()(
)()(...)()(
0
)(
01
)1(
1
)(
tkxdt
tya
tkxtyadt
tya
dt
tya
n
ii
i
i
n
n
nn
n
n
2. Parcijalne diferencijalne jednačine (sadrže jednu ili više zavisno promenljivih
i imaju dve ili više nezavisnih promenljivih zajedno sa parcijalnim izvodima
koji su funkcija nezavisno promenljivih)

16
Na primer: difuziona jednačina
t
Tk
x
T
- je parcijalna diferencijalna jednačina
T – zavisna promenljiva zavisi od (x) i od (t).T predstavlja koncentraciju neke
količine(npr. primese u poluiprovodniku) na nekom mestu (x) i u nekom vremenu
t).
k – koeficijent
x – mesto posmatranja (nezavisna promenljiva)
t – predstavlja vreme posmatranja(nezavisna promenljiva)
Diferencijalne jednačine su korisne za povezivanje promena promenljivih i
drugih parametarta.
Primer:
Drugi Njutnov zakon može se alternativno napisati kao odnos između sile f,
mase M i odnosa promene brzine mase (v) sa vremenom (t),tj.
dt
dvMf
Dalje, isti zakon možemo izraziti tako što ćemo ubrzanje izraziiti kao drugi
izvod pređenog puta (x) u vremenu (t), tj.
2
2
dt
xdMf
Primer:
Omov zakon može se alternativno napisati kao odnos između napona (u),
otpornosti R i iznosa protoka naelektrisanja kroz otpornost dt
dq, tj.
dt
dqRu
Vremenski promenljive diferencijalne jedančine su jedančine kod kojih
jedan ili više članova eksplicitno zavise od nezavisne promenljive t. Na primer,
)()()(
2
22 txty
dt
tydt
Ovde je eksplicitna zavisnost od vremena t izražena preko koeficijenta 2t , jer bi
bez njega ova diferencijalna jednačina bila vremenski nepromenljiva.

17
Vremensski nepromenljiva diferencijalna jednačina je jednačina u kojoj
nijedan od članova ne zavisi eksplicitno od nezavisno promenljive t (ovde je u
pitanju implicitna zavisnost). To znači da proces koji je opisan ovakvom
jednačinom ne varira sa vremenom. Tako, jednačina oblika
m
jj
j
j
n
ii
i
idt
xdb
dt
yda
1
)(
1
)(
gde su koeficijenti ai (i=0,1,2,....), bj (j=0,1,2,3, ....) konstantni, jeste vremenski
nepromenljva diferencijalna jednačina, jer ona zavisi implicitno od vremena (t),
preko zavisno promenljivih x i y i njihovih izvoda.
Diferencijalna jednačina koja se sastoji od sume linearnih članova jeste
linearna diferencijalna jednačina.
Linedarni član je onaj kada je nezavisno promenljiva ili njeni izvodi prvog
stepena. Primer linearne diferencijalne jednačine
m
jj
j
j
n
ii
i
idt
xdb
dt
yda
1
)(
1
)(
Sve druge jednačine su nelinearne diferencijalne jednaline.
Primeri nelinearnih diferencijalnih jednačina:
0
2
y
dt
dy (Ovde je član
2
dt
dynelinearan).
0cos2
2
ydt
yd (Ovde je član cosy nelinearan član).
PREDSTAVLJANJE SISTEMA
Matematički model sistema koji se često zadaje odgovarajućim jedančinama
obično se predstavljai blok – dijagramima.
Nasuprot apstraktnijem matematičkom predstavljanju blok dijagarami ukazuju realnije na
stalni proces koji se odigrava u sistemu. Za čitav sistem je relativno lako formirati
globalni dijagram jednostavnim kombinovanjem blokova za svaku pojedinačnu
komponentu sistema, ili deo sistema.

18
G(D) e c=G(D)e Blok sa operacijomG(D) predstavlja simbol za
množenje
Elementi blok dijagrama su:
1. KOMPARATOR – Važan element kod predstavljanja sistema jeste komparator.
To je elemet koji služi za poređenje željenog i stvarnog (upravljačkog) signala, pri
čemu se dobija greška koja se dalje šalje na ulaz sistema. Šematski se predstavlja
na sledeći način
U slučaju kada je upravljana promenljiva c direktno dovedena na komparator tj.
predstavlja direktnu povratnu spregu, tada se radi o JEDINIČNOJ NEGATIVNOJ
POVRATNOJ SPREZI.
2. ELEMENT UPRAVLJANJA – dreugi element kod predstavljanja sistema je
element uprvljanja. To je deo sistema koji se nalazi između signala dejstva e i
upravljane promenljive c. Ako sa G(D) označimo operacije upravljačkog
elementa, tada se element upravljanja može grafički predstaviti na sledeći način
U ovom slučaju izlaz sistema (c) dobija se kao proizvod funkcije G(D) sa ulaznom
veličinom (e), tj. c = G(D)*e
Sa kružnim elementima koji predstavljaju tačke sumiranja i sa blokovima, koji ukazuju
na odgovarajuća množenja, bilo koji linearni matematički izraz može da bude
predstavljen preko notacije blok dijagramima.
3. Kombinovanjem navedenih grafičkih predstavljanja dobija se potpuni blok
dijagram za elementarnu jediničnunegativnu povratnu spregu sistema upravljanja.
r + e = r-c
-
c
G(D) r +
-
c
c
SISTEM *
r – referenti ulaza
c – signal povratne veze
(upravljana promenljiva)
e – signal dejstva
– je simbol koji kazuje na
sumiranje signala
Elementarna jedinična povratna sprega
dobija se ako iskombinujemo
komparator i element upravljanja. Izlaz
c se bez posrednika vraća na
komparator. Ovaj sistem je u stanju da
sam sebe koriguje.

19
Često puta, kada se upravljana promenljiva (c) vraća natrag na komparator, obično je
potrerbno da konvertujemo oblik upravljane promenljive (c) na oblik koji je pogodan
za komparator. Na primer: ako je fizička veličina upravljane promenljive (c) struja, a
fizička veličina referentnog signala (r) napon, tada je potrebno da konvertujemo
veličinu upravljane c promenljive u napon.
Ovakva konverzija se ostvaruje pomoću elementa povratne sprege H(D).
4. generalni blok dijagram za sisteme upravljanja sa povratnom spregom bio bi:
ELEMENT POVRATNE SPREGE – konvertuje upravljani signal c radi pogodnijeg
poređenja sa referentnim signalom r.
Signal povratne sprege (b) jednak je proizvodu funkcije H(D)*c
Elementi upravljanja predstavljeni sa G(D) su elementi direktne grane, jer je
njihova lokacija u direktnoj grani dela petlje.
Elementi predstavljeni sa H(D) nazivaju se elementi povratne sprege zato što su
oni locirani u delu povratne sprege upravljanja.
Dejstvujući signal (e) je mera ili indikacija greške i jednaka je razlici referentnog
signala i signala povrane sprebe:
e = r – b
Pojam sistema upravljanja sa povratnom spregom je opšti pojam koji se
primenjuje na bilo koji sistem u kome se upravljan promenljiva meri i vraća natrag da bi
bila poređena sa referentnim ulazom.
G(D)
H(D)
c
b=H(D)*c
e = r-b r + Klasišna povratna sprega se dobija
kada se u granu elementarne
povratne sprege doda element
povratne sprege H(D) preko koga se
upravljani signala (c) vraća natrag
na komparator, i ako je potrebno
konvertuje u pogodan oblik.

20
Primer: čovek u hodu
Željena brzina sa kojom čovek želi da se kreće je referentni ulaz.
Stvarna brzina sa kojom se čovek kreće je upravljana brzina,
Ukoliko čovek želi da se šeta kroz park, tada je željena brzina mala.
Kada je čovek u žurbi, željena brzina ja tada veća.
Komparator poredi referentni ulaz (željena brzina) sa upravljanom promenljivom (stvarna
brzina) i kao rezultata daje razliku ovih veličina.
Mozak čoveka služi kao komparator. Signal greške ide do nogu čoveka u cilju da on
ubrza kretanje ili da ga uspori. Cilj je da se greška svede na nulu, tj. da stavrna brzina
bude jednaka željenoj.
Slika: Čovek u hodu kao sistem sa povratnom spregom
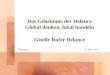
Primer: Sistem regulisanja dotoka vode u rezervoar
Ciljn ovog sistema je da se održi nivo tečnosti na željenoj visisni H. Veličina toka koji
izlazi iz rezervoara Qiz varira sa zahtevom. Operator otvara ili zatvara ventil da bi
regulisao iznos toka u rezervoaru Qul i time održava željenu visinu tečnosti u rezervoaru.
Čovek
Upravljana promenljiva (stvarna brzina hodanja)
+
Željena brzina (referentna
brzina hodanja)
Mozak (čovek)

21
Slika: Sistem regulisanja dotoka tečnosti u rezervoaru.
Ako ovakvim sistemom upravlja čovek, onda bi blok dijagram sistema bio:
Slika: blok dijagram sistema sa povratnom spregom
Ruke i ventil
Tečnost u rezervoaru
Oči
Stvarni nivo
Željeni nivo
Čovekov mozak
H
Qul
Qiz
Tečnost

22
Kod ovog sistema:
- čovekov mozak igra ulogu kontrolera
- ruke operatera zamenjuju pneumatski ventil
- oči čoveka predstavljaju senzor (plovak)
Posao operatera u ovom slučaju jeste naporan. Sistem se može automatizovazi, tako da
umesto operatera posao odrađuje kontroler i pneumatski ventil. Šematski dijagram ovog
sistema je prikazano na slici
Sistem regulisanja nivoa tečnosti u rezervoaru pomoću pbneumatskog ventila
Ovde automatski kontroler podržava novo tečnosti poređenjem stvarnog novoa sa
željenim nivopom (H) i ispravlja bilo koju grešku podešavanjem otvaranja pneumatskog
ventila.
Blok dijagram ovakvog sistema upravljanja prikazan je na slici
Pneumatski ventil
Kontroler
Opadanje tečnosti
Dotok tečnosti
Tečnost

23
Pneumatski ventil
Tečnost u rezervoaru
Plovak (senzor)
Stvarni nivo
Željeni nivo
Kontroler
Recommended