선형유도 전동기의추력 특성 해석
충남대학교
정재훈 박사과정

Contents
2. LIM의 정격 추력
1. 개요
3. LIM의 능력곡선
4. 등가 회로정수
5. 결론 및 토의

개요01

4
01. 개요
자기부상열차
자기작용의 원리를 이용하여 차량을 선로 위에 부상시켜 움직이는 열차 현재 국내에서는 한국 기계연구원의 주도아래 2가지 타입의 자기부상열차가 개발 됨
<도시형 자기부상열차> - 110km/h급 <초고속 자기부상열차> - 550km/h급

5
01. 개요
자기부상열차 부상 및 추진 원리
부상 원리 추진 원리

6
01. 개요
자기부상열차 주행 영상

7
01. 개요
자기부상열차 추진용 선형 유도전동기
선형 유도전동기 (Linear Induction Motor : LIM)
<자기부상열차용 선형 유도전동기>

LIM의 정격 추력02

9
LIM의 정격 추력
선형 유도전동기(LIM)의 설계 요구 사양
준고속(200[km/s]급) 자기부상열차의 차량 사양
1. 열차 편성 : 6량 1편성
2. 설계 최고속도 : 200[km/h]
3. 최고 운행속도 : 180[km/h]
4. 최대 가속도 : 2.0 [km/h/s]
5. 대차수량 : 6대/량
6. 6량 편성 견인력 : 14.7[kN]
7. LIM당 견인력 : 3.06[kN]
Levitation magnet
Hydraulic brake
Levitation magnet
Guide magnet
LIM
Levitation magnet
Hydraulic brake
LIM
Levitation magnet
Guide magnet
Levitation magnet
Hydraulic brake
Levitation magnet
Guide magnet
LIM
Levitation magnet
Hydraulic brake
LIM
Levitation magnet
Guide magnet
LIM
Levitation magnet
Hydraulic brake
LIM
Levitation magnet
Guide magnet
LIM
Levitation magnet
Hydraulic brake
LIM
Levitation magnet
Guide magnet
TC1 M1 M2 M3 M4 TC2
PAN PANMTrMTrMTrMTrACB ACB
1 2 3 4 5 6 1 2 3 4 5 6
냉난방장치냉난방장치 냉난방장치 냉난방장치 냉난방장치 냉난방장치
<준고속 자기부상열차의 기기배치도>

10
LIM의 정격 추력
선형 유도전동기(LIM)의 설계 요구 사양
준고속(200[km/s]급) 자기부상열차 추진용 LIM
1. 3[m]의 대차 길이
2. 12극 77슬롯을 갖는 1차측 이동자
3. 부상 공극 12 [mm]
4. 기준속도 90[km/h]
5. 220[mm]의 적층폭
6. 웨지의 적용
<LIM의 2D 평면도>

11
LIM의 정격 추력
선형 유도전동기(LIM)의 설계 요구 사양
Poles 12 Base Velocity 25 (m/s) Pole Pitch 192.6 (mm)
Slots 77 Coil pitch 5 Input Voltage 245 (Vmax)
Phase 3 Slot Area 913 (mm2) Air-gap Thickness 12 (mm)
Turn per slot per
layer3 Stack Length 220 (mm) Aluminum Thickness 5 (mm)
Layer of slot 2 layer Parallel Branches 1
LIM의 세부 설계 및 해석 조건

12
LIM의 정격 추력
추력 계산을 위한 유한요소해석
ANSYS Electromagnetics Suie 16.0.0 (ANSYS Maxwell 2015)
1. 전자장의 해석 및 계산
2. 전압원을 입력으로 하는 Transient 해석

13
LIM의 정격 추력
추력 해석
Mesh Model

14
LIM의 정격 추력
추력 해석
입력 조건의 선정
1. 전류원 : 입력 전류에 따라 추력이 바
로 계산 되어짐.
2. 전압원 : 전류는 저항 및 전기자 반작
용에 따라 변화하는 종속변수. 따라서
유도전동기의 해석에서는 전압원 해
석이 좀더 바람직함.
3. 주파수 : 유도전동기는 슬립이 존재하
므로 실제 운전속도의 주파수보다 빠
른 주파수를 입력 해야 함. 슬립에 특
성 분석이 매우 중요함.
0 2 4 6 8 10 12 14 16 18 20 22-20
-15
-10
-5
0
5
Thru
st &
Norm
al F
orc
e [k
N]
Slip Frequency [Hz]
Thrust
Normal ForceOperating
Point
<슬립 주파수에 따른 추력 및 수직력 해석 결과>

15
LIM의 정격 추력
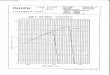
추력 해석
해석 결과
0 50 100 150 200 250 300-8
-6
-4
-2
0
2
4
6
8
Th
rust
[k
N]
Time [ms]
Thrust @ 25[m/s]
Thrust
Current
Current
Density
:
:
:
3.4 [kN]
420 [Arms]
4.6 [A/mm2]
<정격 추력 특성 해석 결과> <자속밀도 분포 및 자속선도 분석 결과>

16
LIM의 정격 추력
슬립에 따른 추력 및 효율 해석
슬립을 고려한 전동기 특성해석
1. 유도전동기에서 슬립은 이동자계와 이
동자의 상대운동을 정의하는 용어임.
2. 선형 유도전동기는 2차측 리액션 플레
이트의 와전류 유도에 의하여 추력이
발생하므로, 슬립 주파수의 선정이 매
우 중요함.
<자속밀도 분포 및 자속선도 분석 결과>
1.0 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.00
1
2
3
4
5
Thrust
Efficiency
Slip [S]
Thru
st [
kN
]
0
10
20
30
40
50
60
70
80
90
100
Eff
icie
ncy
[%
]
슬립 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
회전자계속도
(m/s)∞ 250 125 83 63 50 42 36 31 28 25
운전주파수
(Hz)649 325 216 162 130 108 93 81 72 65

LIM의 능력 곡선03

18
LIM의 능력곡선
유도 전동기의 능력 곡선(Capability Curve)
LIM이 주어진 전압과 전류의 제한조건
에서 출력할 수 있는 속도와 추력 범위를
나타내는 곡선.
전체 운전 범위에서 전동기의 능력을
한눈에 파악 할 수 있음.
정 추력 정 출력 특성
출력
전압
추력
자속
전류
슬립주파수
속도기준속도

19
LIM의 능력곡선
Parametric 해석
정 추력 의 해석
1. 입력 전압과 입력 전류를 조정하며 해석함.
2. 전압과 전류를 동 비율로 증가시키고 운전 속도에 따라 해석을 진행.
정 출력 의 해석
1. 입력 전압은 정하게 고정함.
2. 주파수를 변화 시키고 슬립에 따라 해석을 진행.

20
LIM의 능력곡선
Parametric 해석
일정 추력영역의 해석 결과
1. 기준속도 90[km/h]까지 요
구추력 이상으로 운전이
가능한 결과가 도출됨.
2. 총 90개의 해석 결과로 그
래프를 도출함.
3. 1회 해석에 1시간이 소요
되고 총4 정도 소요됨.
20 40 60 80 100 120 140 160 180 200
-6
-4
-2
0
2
4
6
14Hz-49V
22Hz-73.5V
30Hz-98V
38Hz-122.5V
46Hz-147V
54Hz-171.5V
62Hz-196V
70Hz-220.5V
78Hz-245V
Constant Thrust [3.4 kN]
Th
rust
[k
N]
Velocity [km/h]

21
LIM의 능력곡선
Parametric 해석
정 출력 의 해석
1. 입력 전압에 대하여 주파수별
운전 능력을 확인함.
2. 한 주파수당 11번의 해석을 진
행.
3. 총 12개의 주파수에 대하여 해
석을 진행하고 총 6 정도 소
요됨.
0 25 50 75 100 125 150 175 200 225 2500
2
4
6
8
10
Th
rust
[k
N]
Velocity [km/h]
58Hz
69Hz
80Hz
91Hz
102Hz
113Hz
124Hz
135Hz
146Hz
157Hz
168Hz
179Hz
Slip Frequency(12.5Hz)
Constant thrust region

22
LIM의 능력곡선
운전 능력 검증
운전 능력의 검증
1. 100[km/h]급 LIM과 200[km/h]
급 LIM의 능력 곡선을 비교하
여 운전 성능을 비교가 가능.
2. 구배가 없을 경우의 주행 저항
과 비교하여 설계의 타당성을
검증.
3. 모든 과정을 FEA로 진행 하였
음. 0 50 100 150 200 2500
5
10
15
20
25
30
35Tractive Effort [/car]
Drag Force
100[km/h]
200[km/h]
Thru
st [
kN
]
Speed [km/h]

등가회로 정수04

24
등가회로 정수의 도출
FEA를 활용한 선형 유도전동기의 등가회로 정수 도출
R1 L1
Rm Lm
R2 L2
R2(1-s)/sV1
1차측저항및누설인덕턴스 (R1, L1)
- 비구동조건에서계산.
철손저항및자화인덕턴스 (Rm , Lm)
- 무부하해석조건에서계산.
2차측저항및인덕턴스 (R2 , L2)
- 1차측구속운전조건에서계산.

25
등가회로 정수의 도출
FEA를 활용한 선형 유도전동기의 등가회로 정수 도출
무부하해석 1차측구속조건해석

1차측저항및누설인덕턴스 (R1, L1)
철손저항및자화인덕턴스 (Rm , Lm)
2차측저항및인덕턴스 (R2 , L2)
26
등가회로 정수의 도출
FEA를 활용한 선형 유도전동기의 등가회로 정수 도출
2
13m
m
VR
P
2
211 1
1
1
2m
VL R L
f I
2
1 1 1
2 2
1
3
3
s P R IR
I
2
212 1 2 1
1
1
2
VL R R L
fs I
1
lR
A N Li
등가회로 파라미터
R1 1.299.E-02 [Ω]
L1 1.764.E-04 [H]
Rm 4.442.E+02 [Ω]
Lm 1.023.E-03 [H]
R2 9.696.E-02 [Ω]
L2 2.907.E-04 [H]

결론 및 토의

FEA를활용하여 LIM의설계를진행함.
기하학적구조를고려하여정격추력을해석하고기본설계안을도출함.
능력곡선을도출하여설계한 LIM의성능을확인함.
FEA를활용하여등가회로파라미터를계산하여제시함.
28
결론
FEA를 활용한 LIM의 설계

감사합니다 !
Recommended