
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
1
Unidad 6. TRABAJOS VIRTUALES
6.1. Introducción
El principio del trabajo virtual es un enunciado sobre el trabajo
efectuado por fuerzas y pares cuando un cuerpo o estructura está sometido a
movimientos. Antes de estudiarlo, se definirá el concepto de trabajo.
Considérese una fuerza F que actúa sobre un cuerpo en un punto P
(Fig. 6.1). Supóngase que el cuerpo sufre un movimiento infinitesimal, de
modo que P tiene un desplazamiento diferencial dr. El trabajo dU de la fuerza
F como resultado del desplazamiento dr se define como el producto escalar
dado por la expresión:
L LdU d U d U F dr cosF r F r (6.1)
Es decir es igual al producto de la componente de F en la dirección de dr. Si la
componente de la fuerza es perpendicular al desplazamiento diferencial dr no
se producirá trabajo. Si la componente de la fuerza tiene sentido contrario al
desplazamiento el trabajo será negativo, caso contrario será positivo.
Figura 6.1: Trabajo que desarrolla Figura 6.2: Trabajo de un sistema de fuerzas
una fuerza coplanares concurrentes
En un sistema discreto, el trabajo físico está dado por la sumatoria de
los trabajos desarrollados por todas las fuerzas involucradas, vale decir:
yF4
F1
F 2
F3
dxP
F
P
dr
x

DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
2
n n
i i i i ii i
U d U F dx
1 1
cosF x (6.2)
Si la partícula P se encuentra sometida a la acción de un sistema de
fuerzas coplanares concurrentes y se la somete a un desplazamiento dx , como
se muestra en la Fig. 6.2, cada una de las fuerzas realiza trabajo de tal
manera que el trabajo total será:
x
n n
i i i i xi i
R
U F dx dx F R dx
1 1
cos cos
(6.3)
Si a la misma partícula se la somete a un desplazamiento dy , el trabajo
total del sistema será igual a:
y
n n
i i i i yi i
R
U F dy dy F R dy
1 1
sen sen
(6.4)
Si el sistema de fuerzas se encuentra en equilibrio, la componente de la
resultante en cualquier dirección será igual a cero, por lo que se puede decir:
Si una partícula se encuentra sometida a un sistema de fuerzas en
equilibrio, la suma algebraica de los trabajos de todas las fuerzas será igual a
cero para cualquier desplazamiento arbitrario de la misma.
Si se considera un par M=F. h, antihorario, los puntos de aplicación de
las fuerzas se desplazan distancias diferenciales h/2, de ese modo el trabajo
total realizado es:
h hdU = F . .d + F . .d = M .d
2 2 (6.5)
Figura 6.3: Trabajo de un par de fuerzas o cupla
FF
h
M
F
F
d(h/2).d
(h/2).d
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
3
Cuando un cuerpo sobre el que actúa un par gira un ángulo en el
mismo sentido que el par el trabajo resultante es positivo, caso contrario es
negativo.
6.2. Principio de los Trabajos Virtuales
En este concepto de trabajo físico, intervienen tres circunstancias
independientes:
1. Un sistema de fuerzas en equilibrio (sistema A )
2. Un sistema de desplazamientos infinitésimos, compatibles con las
condiciones de vínculo (sistema B )
3. La nulidad del trabajo al asociar el sistema A con el sistema B
Si uno de estos sistemas, el A o el B o ambos a la vez son virtuales, el
trabajo se denomina trabajo virtual y se puede establecer el siguiente principio:
“Es condición necesaria y suficiente para que un sistema sujeto a
vínculos se encuentre en equilibrio en una determinada posición bajo la acción
de un sistema de fuerzas cualesquiera que el trabajo desarrollado por las
mismas para cualquier desplazamiento virtual compatible con los vínculos sea
nulo.
Sometiendo ciertos tipos de estructuras en equilibrio a desplazamientos
virtuales y calculando el trabajo virtual total, se puede determinar reacciones
desconocidas en los vínculos, como también las fuerzas internas en sus
elementos, o el esfuerzo en barras de un sistema reticulado. El procedimiento
implica encontrar un desplazamiento virtual (traslación infinitésima
hipotética) que origine un trabajo virtual por parte de las cargas conocidas y
por parte de una fuerza o un par desconocido.
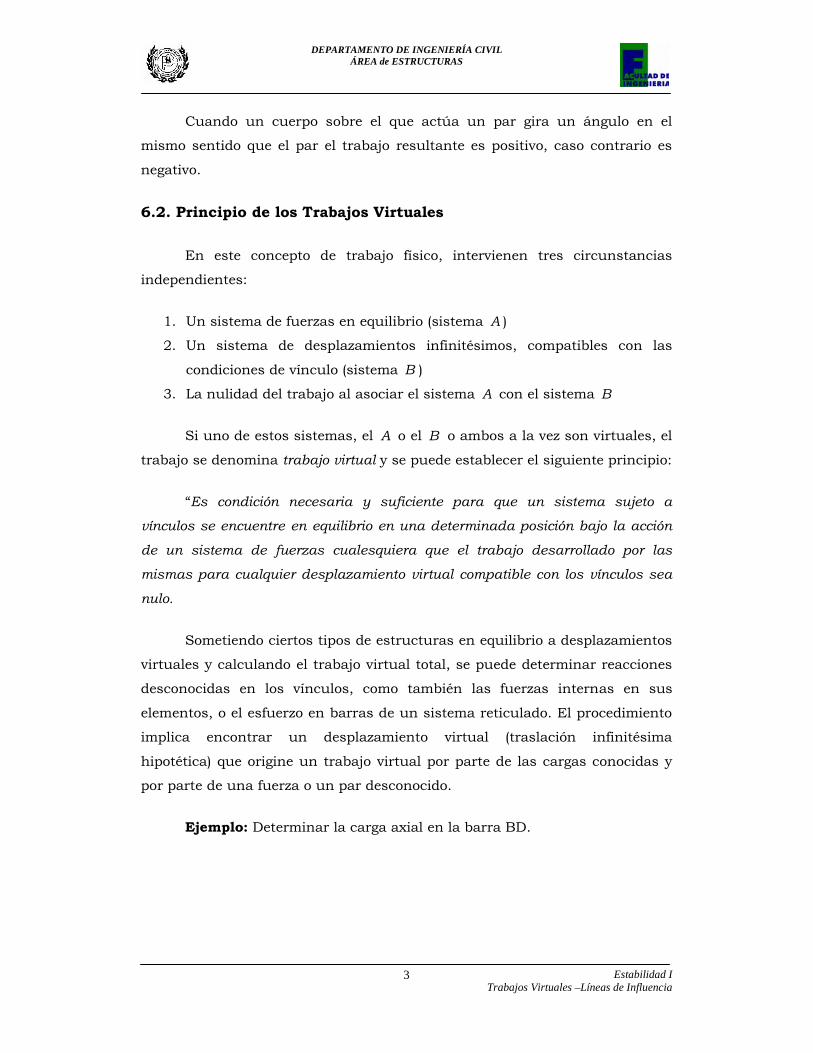
Ejemplo: Determinar la carga axial en la barra BD.
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
4
Figura 6.4: Trabajo de un sistema de barras
Si se le otorga a la estructura un giro virtual o sea un giro compatible
con los vínculos; la fuerza TBD que actúa en B y la carga de 4 t que actúa en C,
realizarán un trabajo virtual. Además el trabajo virtual ejercido por esas dos
fuerzas es el trabajo virtual total hecho sobre los elementos de la estructura,
dado que el trabajo efectuado por las fuerzas internas se cancela entre sí. Así
el planteo será:
BD
BD
U T cos 1,4d 4 1,4.d 0T 6,88t
x x x siendo 54,5
Como se debe conocer cualquier movimiento virtual que puede tener un
sistema para poder aplicarle el principio de los trabajos virtuales (PTV) al
sistema de fuerzas actuantes, es necesario estudiar los movimientos o
desplazamientos de un sistema plano.
6.3. Cinemática de los sistemas planos
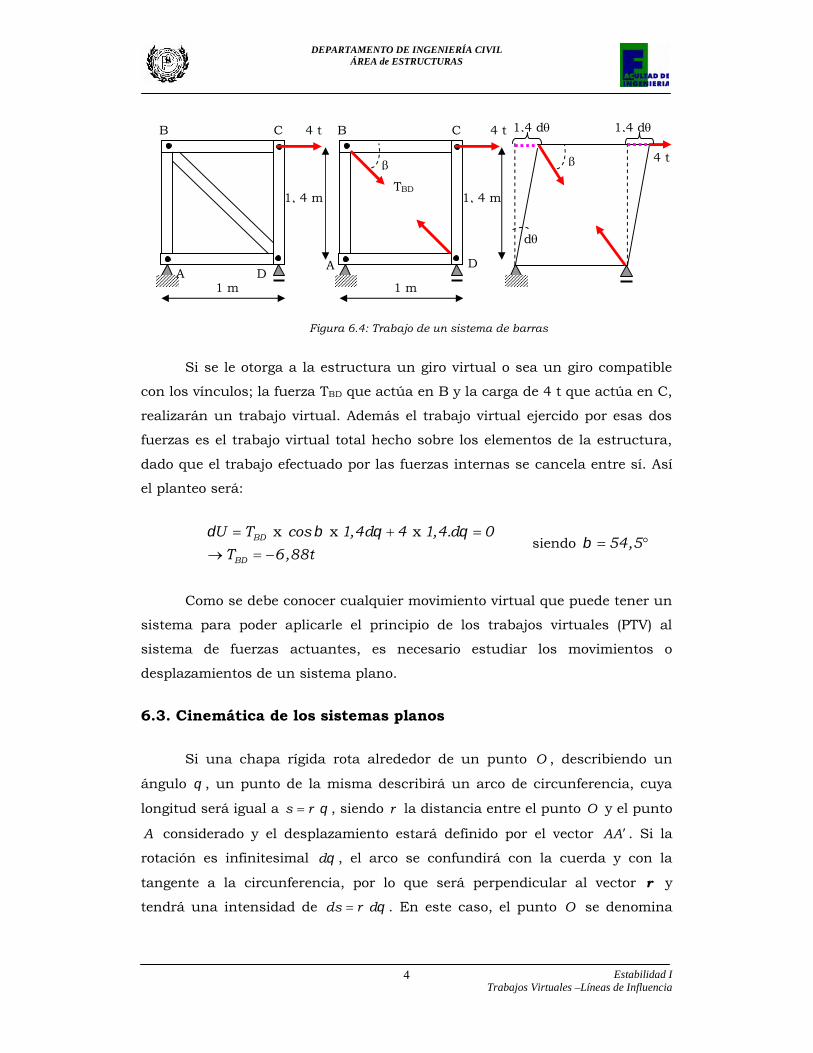
Si una chapa rígida rota alrededor de un punto O , describiendo un
ángulo , un punto de la misma describirá un arco de circunferencia, cuya
longitud será igual a s r , siendo r la distancia entre el punto O y el punto
A considerado y el desplazamiento estará definido por el vector AA . Si la
rotación es infinitesimal d , el arco se confundirá con la cuerda y con la
tangente a la circunferencia, por lo que será perpendicular al vector r y
tendrá una intensidad de ds r d . En este caso, el punto O se denomina
A
B C
D
4 t
1 m
1, 4 m
A
4 tB C
D
1 m
TBD
1, 4 m
d
1,4 d 1,4 d
4 t
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
5
centro instantáneo de rotación o simplemente polo, como se puede observar en
la Fig. 6.5.
Es así que puede admitirse que conocido el desplazamiento que sufre
un punto de la chapa puede ubicarse el polo alrededor del cual gira ese punto
trazando la perpendicular al desplazamiento.
Dado que una chapa se materializa por la ubicación de dos de sus
puntos, si se conoce el desplazamiento de esos dos puntos, se puede ubicar la
posición del polo de la chapa y viceversa. Para ello se trazan desde estos
puntos rectas perpendiculares a los vectores desplazamiento y se busca su
intersección, tal cual se muestra en la Fig. 6.6.
Figura 6.5: Centro instantáneo de rotación Figura 6.6: Polo de una chapa dados los
o polo desplazamientos de dos puntos
Figura 6.7: Desplazamientos paralelos Figura 6.8: Necesidad de conocer el desplazamiento
de igual sentido (polo en el impropio) de un tercer punto
a
b
c
B
A
CO
0
r
dsd r
AA’
B
A
a
b
O
A
A’
a
b
A
B
O

DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
6
Cuando los desplazamientos son paralelos y del mismo sentido, el polo
será un punto impropio del plano, como se aprecia en la Fig. 6.7, y si son de
sentido contrario es necesario conocer el desplazamiento de un tercer punto
no alineado con los otros dos, Fig. 6.8.
Conclusiones:
1. Todo movimiento infinitesimal de una chapa en su plano puede
considerarse como una rotación alrededor de un punto denominado
polo.
2. Si el movimiento es una traslación, el polo es un punto impropio.
3. Conocido el vector desplazamiento de dos puntos de la chapa se puede
determinar la posición del polo.
4. Conocido el polo de una chapa se puede determinar el vector
desplazamiento de cualquier punto de la chapa.
Componentes del vector desplazamiento de una chapa en la dirección delos ejes cartesianos
Sea la chapa S , ubicada en el plano xy de un sistema de coordenadas
xyz , según se indica en la Fig. 6.9. Si rota en su plano alrededor del polo O ,
(origen del sistema de coordenadas) una rotación infinitesimal , el punto
;A AA x y tendrá un desplazamiento definido por el vector a que será
perpendicular al vector posición r .
x
z
y
O
A
a
r
S
Figura 6.9: Chapa en el plano xy rotando alrededor de su polo O

DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
7
Si se asigna un vector a la rotación según la dirección del eje z se
puede establecer que:
0 00
A A
A A
y xx y
i j k
a r a a i j (6.6)
Si se define como corrimiento a la componente del vector desplazamiento
en una dirección dada, se tiene:
Corrimiento según la dirección x : Au y
Corrimiento según la dirección y : Av x
Se observa en la Fig. 6.10 que el valor del corrimiento v en la dirección
y depende exclusivamente de la coordenada x del punto, de donde se puede
enunciar que para todo punto que tenga la misma coordenada x , el
corrimiento que se produce para una rotación será el mismo. Análogamente,
para el corrimiento u en la dirección x del punto considerado. En general se
puede decir que:
Para una rotación de una chapa en su plano, las componentes del
vector desplazamiento de todos los puntos de la chapa que se ubiquen sobre la
misma línea vertical o análogamente sobre la misma línea horizontal serán
iguales, ver la Fig. 6.11.
A las componentes del vector desplazamiento se las llama corrimientos,
por ello se deben estudiar los diagramas de corrimientos o elaciones.
x
y
O
A
a
r
v
u
x
y
O
v
v
v
Figura 6.10: Componentes del desplazamiento Figura 6.11: Corrimientos verticales
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
8
Diagramas de corrimientosPara calcular los diagramas de corrimientos se necesitan conocer los
polos de una chapa. Si se tiene un sistema de chapas se deberán ubicar los
polos absolutos y los polos relativos entre chapas. Conociendo el polo de una
chapa y al provocar una rotación infinitesimal se puede determinar el
corrimiento de todos los puntos de la misma mediante los diagramas de
corrimientos verticales y horizontales de la chapa.
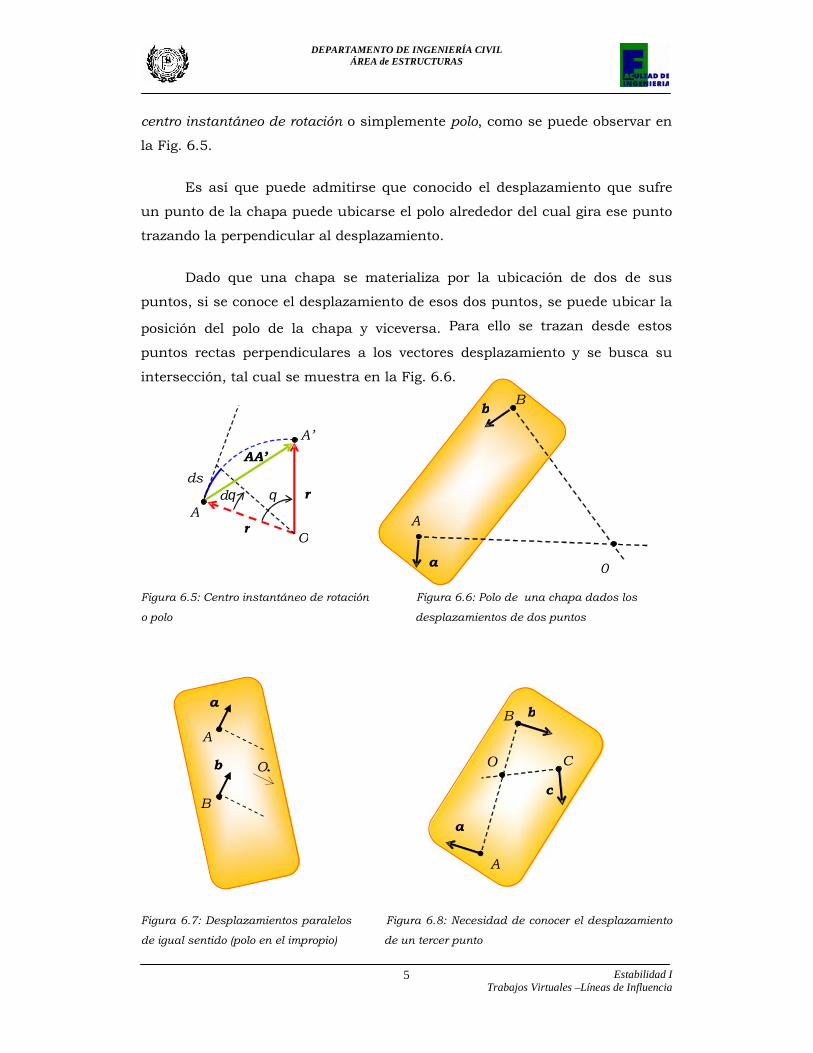
Sea la chapa S referida al sistema de coordenadas ;x y cuyo polo se
encuentra en el punto 1O según se indica en la Fig. 6.12. La chapa puede
rotar alrededor de dicho polo, es decir posee un grado de libertad. El diagrama
de corrimientos verticales se traza a partir de una línea de referencia
horizontal (paralela al eje x ), sabiendo que los puntos ubicados en la misma
vertical que pasan por el polo tienen corrimientos verticales nulos y que todos
los puntos con la misma abscisa tienen el mismo corrimiento vertical. El
diagrama se obtiene al rotar una recta un ángulo alrededor del punto O´1,
proyección vertical del polo de la chapa sobre la línea de referencia. Esa
rotación podrá ser indistintamente en sentido horario o antihorario, siendo su
magnitud arbitraria.
Figura 6.12: Diagramas de corrimientos horizontales y verticales de una chapa
y
O1
A (x ;y)
a
vu
v
u
1
1
S
O’
1O’’
1
x
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
9
De la misma manera se puede encontrar el diagrama de corrimientos
horizontales, adoptando en este caso una línea de referencia vertical y
proyectando sobre ella el polo O1, obteniéndose el punto 1O . La composición
vectorial de los corrimientos vertical y horizontal de un punto cualquiera de la
chapa determina el vector de desplazamiento real de dicho punto.
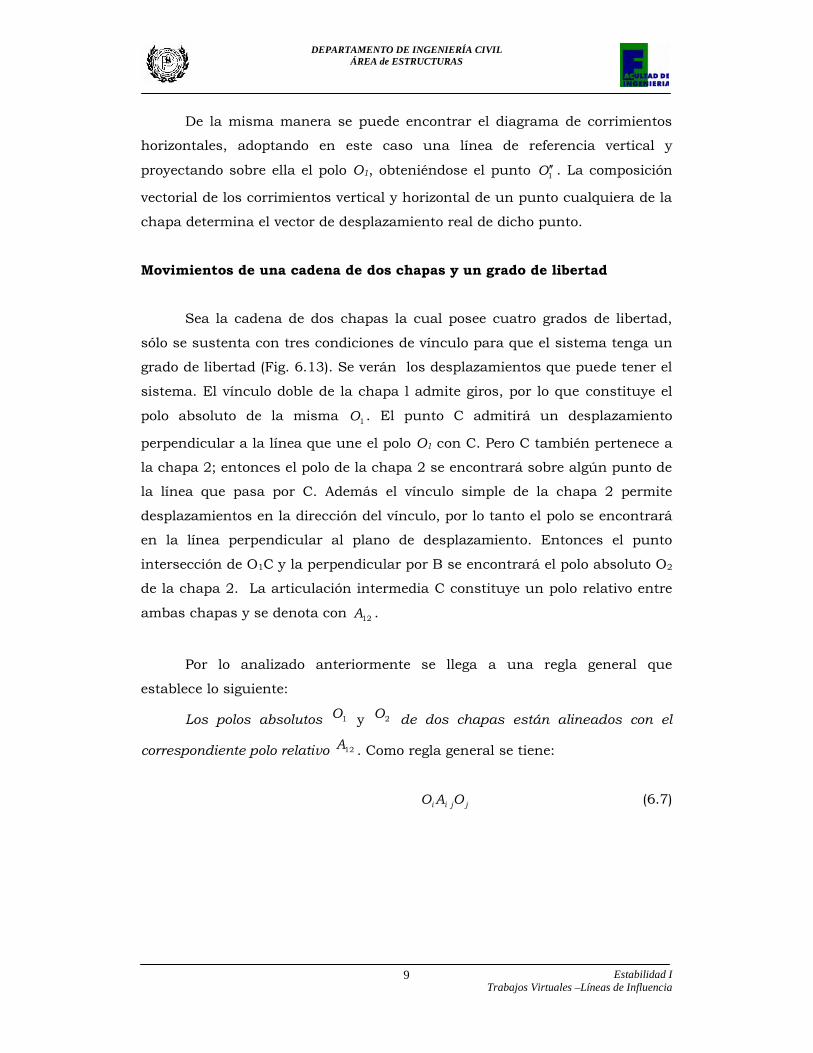
Movimientos de una cadena de dos chapas y un grado de libertad
Sea la cadena de dos chapas la cual posee cuatro grados de libertad,
sólo se sustenta con tres condiciones de vínculo para que el sistema tenga un
grado de libertad (Fig. 6.13). Se verán los desplazamientos que puede tener el
sistema. El vínculo doble de la chapa l admite giros, por lo que constituye el
polo absoluto de la misma 1O . El punto C admitirá un desplazamiento
perpendicular a la línea que une el polo O1 con C. Pero C también pertenece a
la chapa 2; entonces el polo de la chapa 2 se encontrará sobre algún punto de
la línea que pasa por C. Además el vínculo simple de la chapa 2 permite
desplazamientos en la dirección del vínculo, por lo tanto el polo se encontrará
en la línea perpendicular al plano de desplazamiento. Entonces el punto
intersección de O1C y la perpendicular por B se encontrará el polo absoluto O2
de la chapa 2. La articulación intermedia C constituye un polo relativo entre
ambas chapas y se denota con 12A .
Por lo analizado anteriormente se llega a una regla general que
establece lo siguiente:
Los polos absolutos 1O y 2O de dos chapas están alineados con el
correspondiente polo relativo 12A . Como regla general se tiene:
i i j jO A O (6.7)
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
10
Figura 6.13: Diagramas de corrimientos horizontales y verticales de una cadena de dos chapas
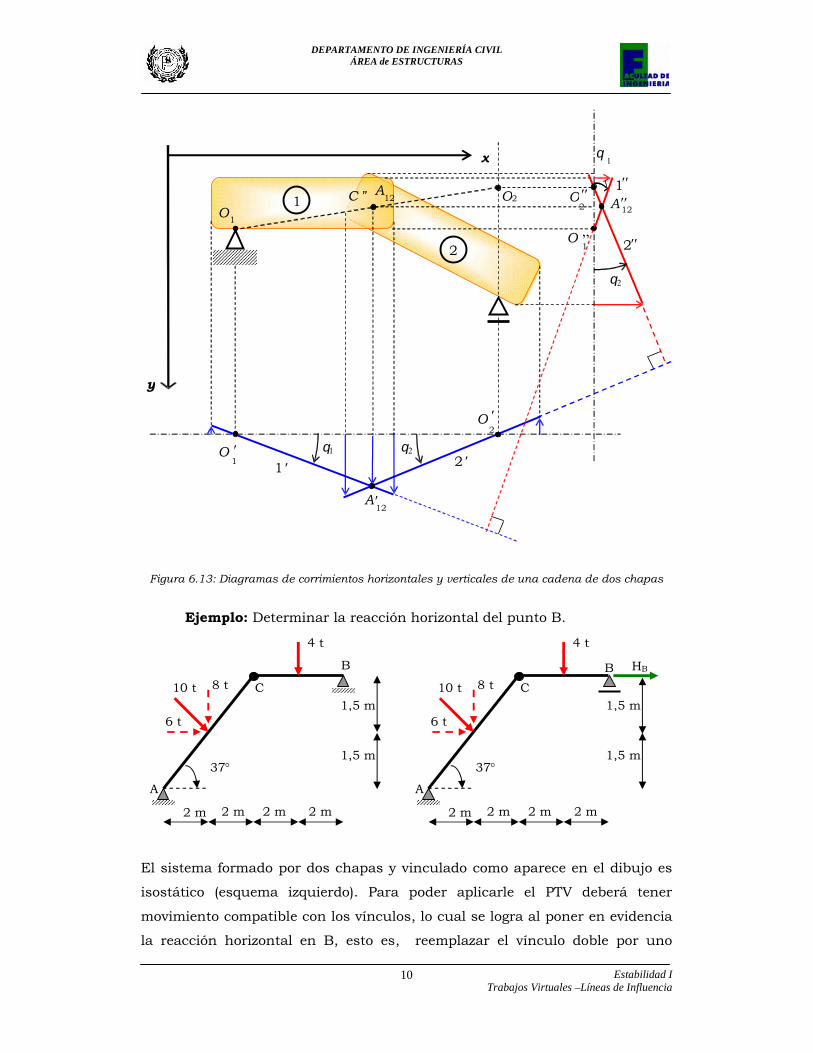
Ejemplo: Determinar la reacción horizontal del punto B.
El sistema formado por dos chapas y vinculado como aparece en el dibujo es
isostático (esquema izquierdo). Para poder aplicarle el PTV deberá tener
movimiento compatible con los vínculos, lo cual se logra al poner en evidencia
la reacción horizontal en B, esto es, reemplazar el vínculo doble por uno
x
y
O1
12A
C 12A
O2
1
2
12A
1O
2O
1
2
1 2
2O
1O
A
B
C
4 t
10 t 8 t
6 t
2 m 2 m 2 m 2 m
1,5 m
1,5 m 37
A
BC
4 t
10 t 8 t
6 t
2 m 2 m 2 m 2 m
1,5 m
1,5 m 37
HB
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
11
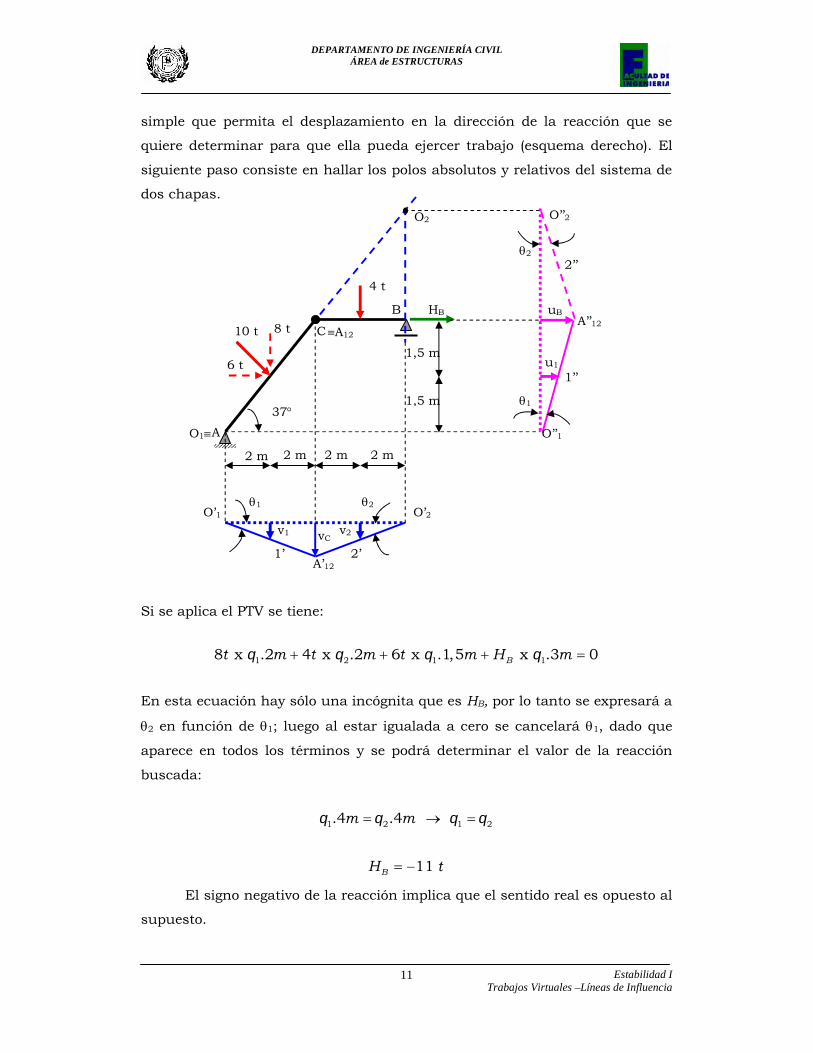
simple que permita el desplazamiento en la dirección de la reacción que se
quiere determinar para que ella pueda ejercer trabajo (esquema derecho). El
siguiente paso consiste en hallar los polos absolutos y relativos del sistema de
dos chapas.
Si se aplica el PTV se tiene:
1 2 1 18 x .2 4 x .2 6 x .1,5 x .3 0Bt m t m t m H m
En esta ecuación hay sólo una incógnita que es HB, por lo tanto se expresará a
2 en función de 1; luego al estar igualada a cero se cancelará 1, dado que
aparece en todos los términos y se podrá determinar el valor de la reacción
buscada:
1 2 1 2.4 .4m m
11BH t
El signo negativo de la reacción implica que el sentido real es opuesto al
supuesto.
O1A
B
C
4 t
10 t 8 t
6 t
2 m 2 m 2 m 2 m
1,5 m
1,5 m 37
HB
A12
O2
O’1 O’2
A’12
1 2
v1 v2 vC
1’ 2’
O’’1
O’’2
A’’12
1
2
1’’
2’’
u1
uB
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
12
Si se tuviera otro estado de cargas, se puede hallar el valor de la
reacción en B con el mismo diagrama de corrimiento, ya que el sistema
estructural y su vinculación no se alteraron.
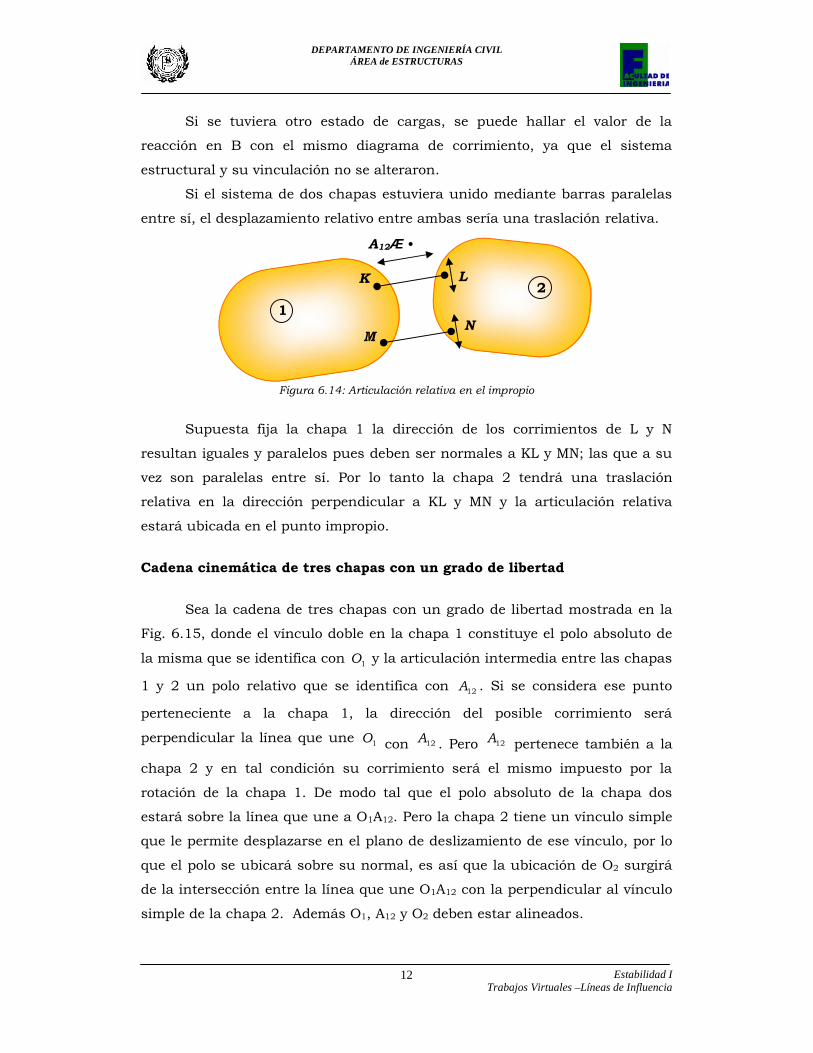
Si el sistema de dos chapas estuviera unido mediante barras paralelas
entre sí, el desplazamiento relativo entre ambas sería una traslación relativa.
Figura 6.14: Articulación relativa en el impropio
Supuesta fija la chapa 1 la dirección de los corrimientos de L y N
resultan iguales y paralelos pues deben ser normales a KL y MN; las que a su
vez son paralelas entre sí. Por lo tanto la chapa 2 tendrá una traslación
relativa en la dirección perpendicular a KL y MN y la articulación relativa
estará ubicada en el punto impropio.
Cadena cinemática de tres chapas con un grado de libertad
Sea la cadena de tres chapas con un grado de libertad mostrada en la
Fig. 6.15, donde el vínculo doble en la chapa 1 constituye el polo absoluto de
la misma que se identifica con 1O y la articulación intermedia entre las chapas
1 y 2 un polo relativo que se identifica con 12A . Si se considera ese punto
perteneciente a la chapa 1, la dirección del posible corrimiento será
perpendicular la línea que une 1O con 12A . Pero 12A pertenece también a la
chapa 2 y en tal condición su corrimiento será el mismo impuesto por la
rotación de la chapa 1. De modo tal que el polo absoluto de la chapa dos
estará sobre la línea que une a O1A12. Pero la chapa 2 tiene un vínculo simple
que le permite desplazarse en el plano de deslizamiento de ese vínculo, por lo
que el polo se ubicará sobre su normal, es así que la ubicación de O2 surgirá
de la intersección entre la línea que une O1A12 con la perpendicular al vínculo
simple de la chapa 2. Además O1, A12 y O2 deben estar alineados.
K L
MN
12
A12
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
13
x
y
O1
1O
1
1
12A
23A
12A
O22O
2O
12A1
223A
3O
3O 3
23A
2
2
3
3
3O
3
3
1O
Figura 6.15: Diagramas de corrimientos horizontales y verticales de una cadena de tres chapas
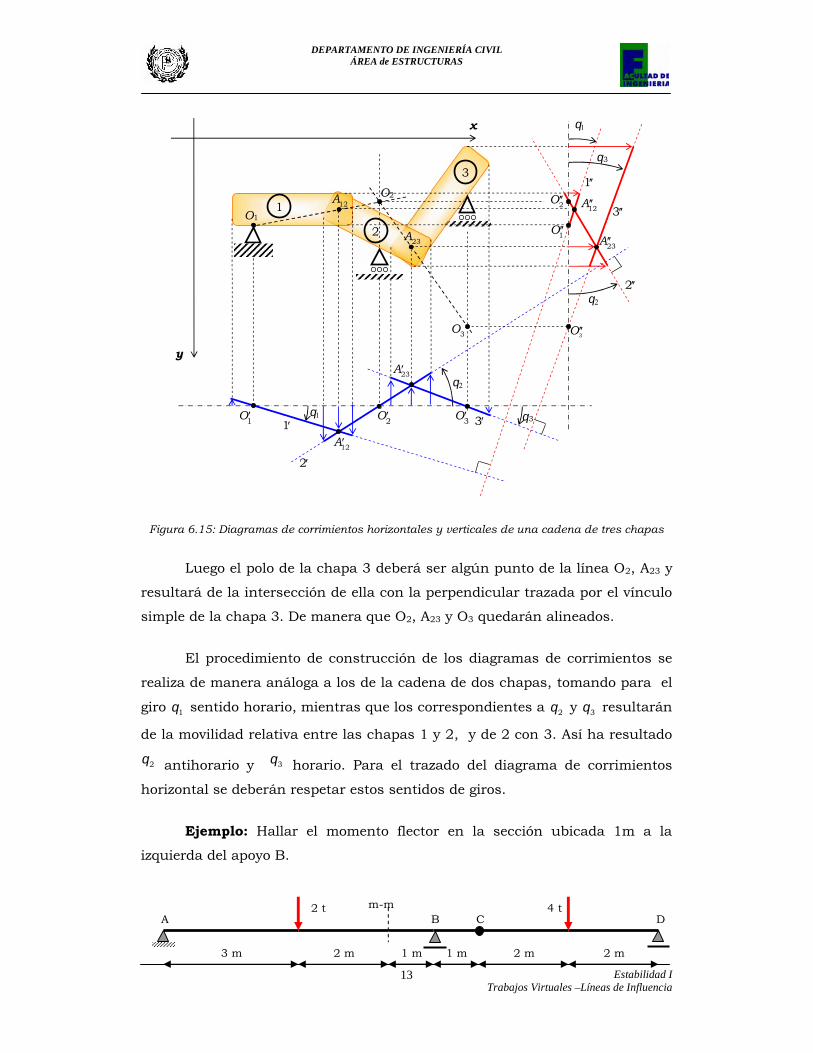
Luego el polo de la chapa 3 deberá ser algún punto de la línea O2, A23 y
resultará de la intersección de ella con la perpendicular trazada por el vínculo
simple de la chapa 3. De manera que O2, A23 y O3 quedarán alineados.
El procedimiento de construcción de los diagramas de corrimientos se
realiza de manera análoga a los de la cadena de dos chapas, tomando para el
giro 1 sentido horario, mientras que los correspondientes a 2 y 3 resultarán
de la movilidad relativa entre las chapas 1 y 2, y de 2 con 3. Así ha resultado
2 antihorario y 3 horario. Para el trazado del diagrama de corrimientos
horizontal se deberán respetar estos sentidos de giros.
Ejemplo: Hallar el momento flector en la sección ubicada 1m a la
izquierda del apoyo B.
3 m 2 m 1 m 1 m 2 m 2 m
2 t 4 tA B C D
m-m
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
14
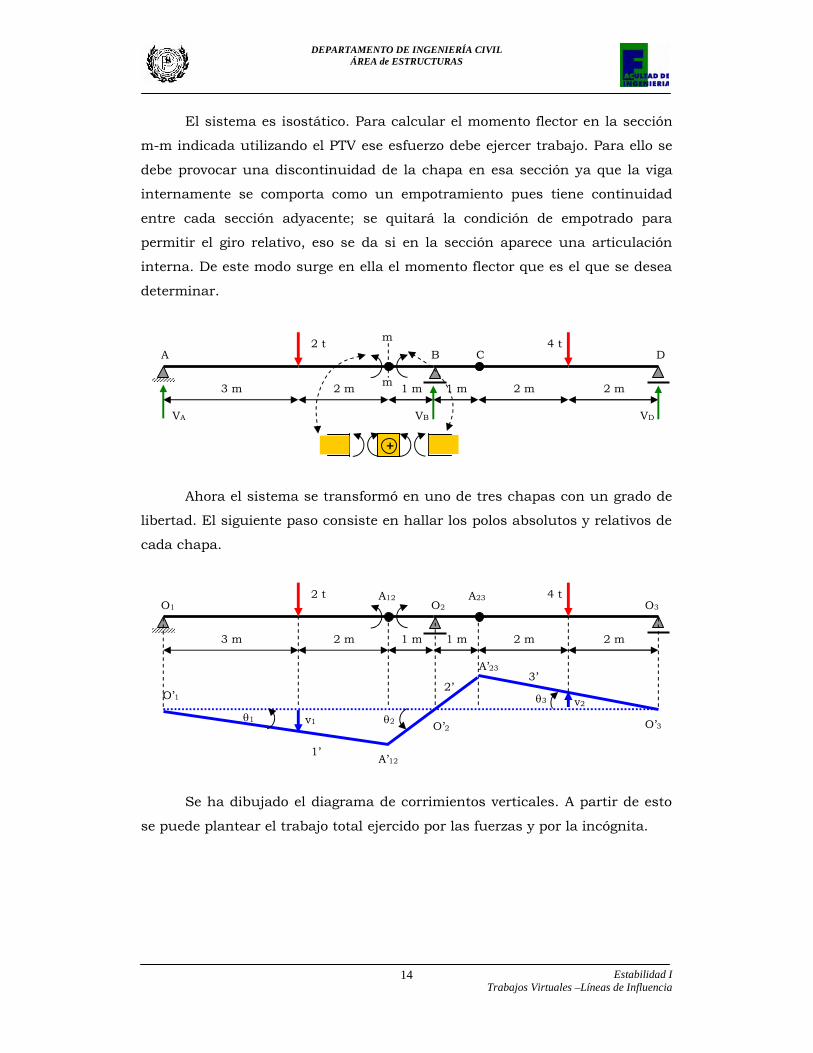
El sistema es isostático. Para calcular el momento flector en la sección
m-m indicada utilizando el PTV ese esfuerzo debe ejercer trabajo. Para ello se
debe provocar una discontinuidad de la chapa en esa sección ya que la viga
internamente se comporta como un empotramiento pues tiene continuidad
entre cada sección adyacente; se quitará la condición de empotrado para
permitir el giro relativo, eso se da si en la sección aparece una articulación
interna. De este modo surge en ella el momento flector que es el que se desea
determinar.
Ahora el sistema se transformó en uno de tres chapas con un grado de
libertad. El siguiente paso consiste en hallar los polos absolutos y relativos de
cada chapa.
Se ha dibujado el diagrama de corrimientos verticales. A partir de esto
se puede plantear el trabajo total ejercido por las fuerzas y por la incógnita.
3 m 2 m 1 m 1 m 2 m 2 m
2 t 4 tO2 O1
m
A12
m A23
m O3
1
m O’2
O’1m
O’3
A’12
m
A’23
m
2
m
3
m v1
m
v2
m
1’m
2’m
3’m
3 m 2 m 1 m 1 m 2 m 2 m
2 t 4 tA B C D
+
VA VB VD
m
m

DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
15
1 2 1 2
1 3 1 2
1 2 2 3 3 1
3 1 2 1
1 1 1 1
2 x 4 x . . 0 2 x .3 4 x .2 . . 0 5 . 1 . 1 . 4 . 4m. 5 .
5 5.45 2 x .3 4 x .2 . .5. 04
t v t v M Mt m t m M M
m m m m m
t m t m M M
m-m2 M =- 0,6663
tm
El signo implica que el momento en la sección m-m es de signo contrario al
supuesto, es decir negativo.
Este resultado se puede verificar con el que se obtiene aplicando las
ecuaciones de equilibrio de la estática:
.
0 4 2 0
0 .11 2 .8 .5 4 .2 0
. 8 0 .7 2 .4 .1 07
11 88 16 5 8 0 3,429 . 11,429 07 7
y A B D
D A B
izq BC A B A
BB B
F V V V t t
M V m t m V m t mV m tmM V m t m V m V
mmV tm tm mV tm m V tmm m
A
m-m
m-m
3,333 V 0,666
M 0,666 .5 2 .2 M 0,67
BV t t
t m t mtm
Implica un momento en la sección m-m negativo.
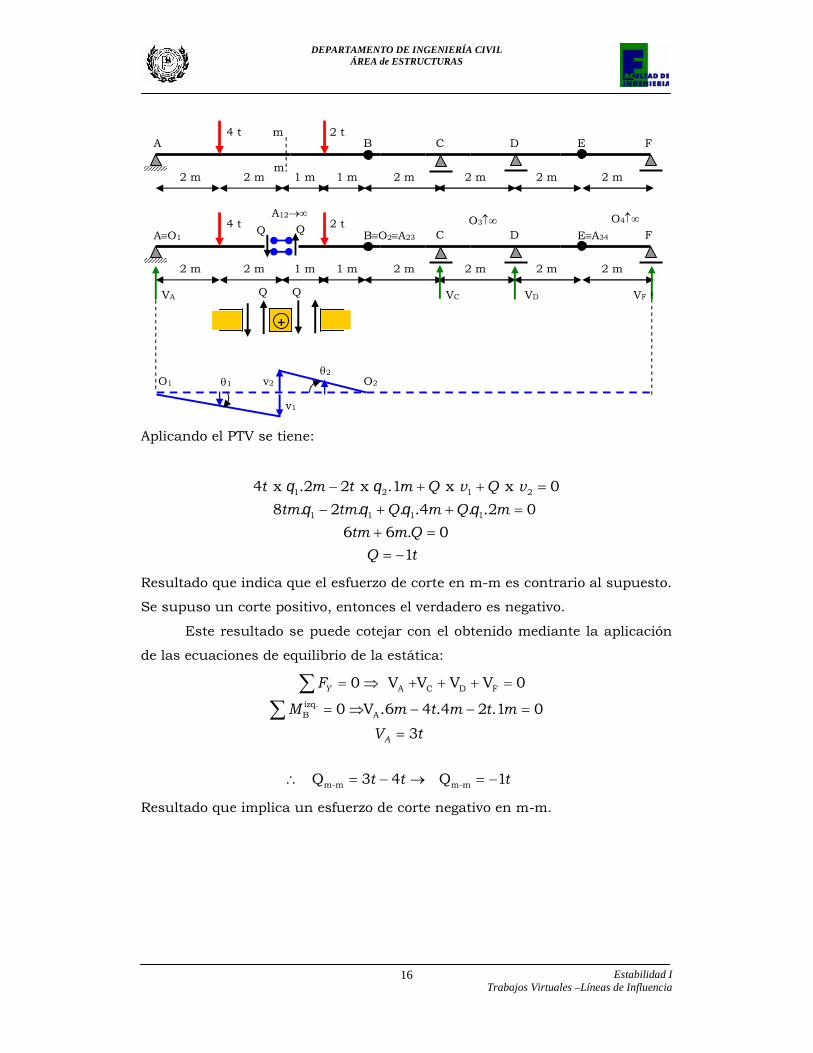
Ejemplo: Calcular el esfuerzo de corte en la sección m-m de la viga que
aparece a continuación:
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
16
Aplicando el PTV se tiene:
1 2 1 2
1 1 1 1
4 x .2 2 x .1 x x 0 8 . 2 . . .4 . .2 0 6 6 . 0 1
t m t m Q v Q vtm tm Q m Q m
tm m QQ t
Resultado que indica que el esfuerzo de corte en m-m es contrario al supuesto.
Se supuso un corte positivo, entonces el verdadero es negativo.
Este resultado se puede cotejar con el obtenido mediante la aplicación
de las ecuaciones de equilibrio de la estática:
A C D F
izq.B A
m-m m-m
0 V V V V 0
0 V .6 4 .4 2 .1 0
3
Q 3 4 Q 1
Y
A
F
M m t m t mV t
t t t
Resultado que implica un esfuerzo de corte negativo en m-m.
2 m 1 m 2 m 2 m 2 m 2 m
2 t 4 tA B C D
1 m 2 m
E Fm
m
2 m 1 m 2 m 2 m 2 m 2 m
2 t 4 tAO1 BO2A23 C D
1 m 2 m
EA34 F Q Q
+
Q Q VA VC VD VF
A12 O3 O4
O2O1
v1
v212
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
17
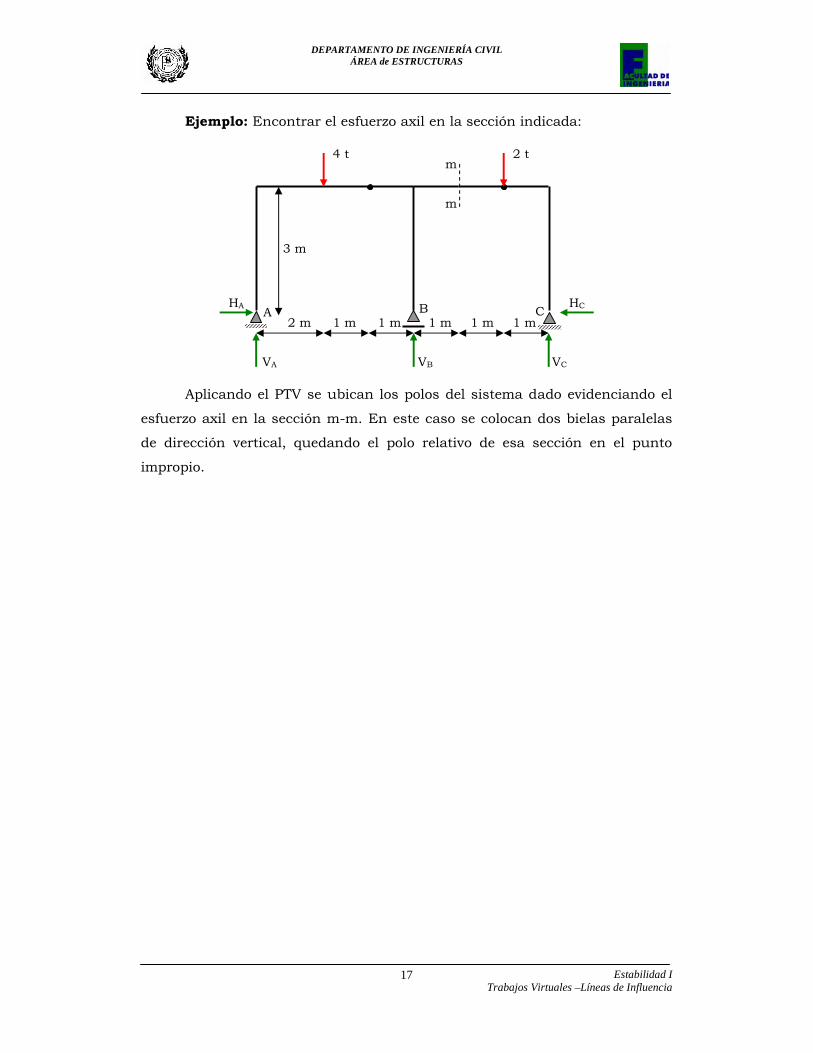
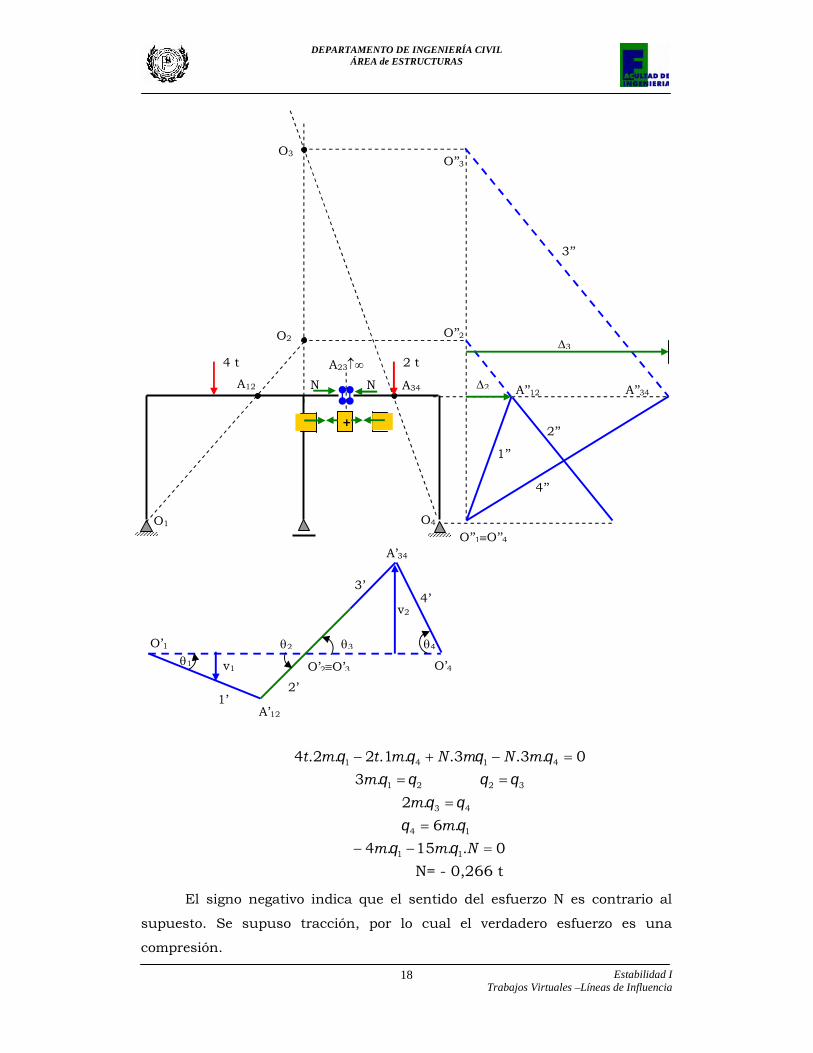
Ejemplo: Encontrar el esfuerzo axil en la sección indicada:
Aplicando el PTV se ubican los polos del sistema dado evidenciando el
esfuerzo axil en la sección m-m. En este caso se colocan dos bielas paralelas
de dirección vertical, quedando el polo relativo de esa sección en el punto
impropio.
m
m4 t 2 t
2 m 1 m 1 m 1 m 1 m 1 m
3 m
A B C
VA VB VC
HA HC
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
18
1 4 1 4
1 2 2 3
3 4
4 1
4 .2 . 2 .1 . .3 .3 . 0 3 . 2 . 6 .
t m t m N m N mm
mm
1 1 4 . 15 . . 0N= - 0,266 t
m m N
El signo negativo indica que el sentido del esfuerzo N es contrario al
supuesto. Se supuso tracción, por lo cual el verdadero esfuerzo es una
compresión.
1
2 3 4
v1
v2
1’ 2’
3’ 4’
O’1
O’2O’3 O’4
A’12
A’34
A23
N
4 t 2 t
O1 O4
NA12 A34
O2
O3
2
3
1’’
4’’
2’’
O’’1O’’4
O’’2
O’’3
A’’12 A’’34
3’’
+
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
19
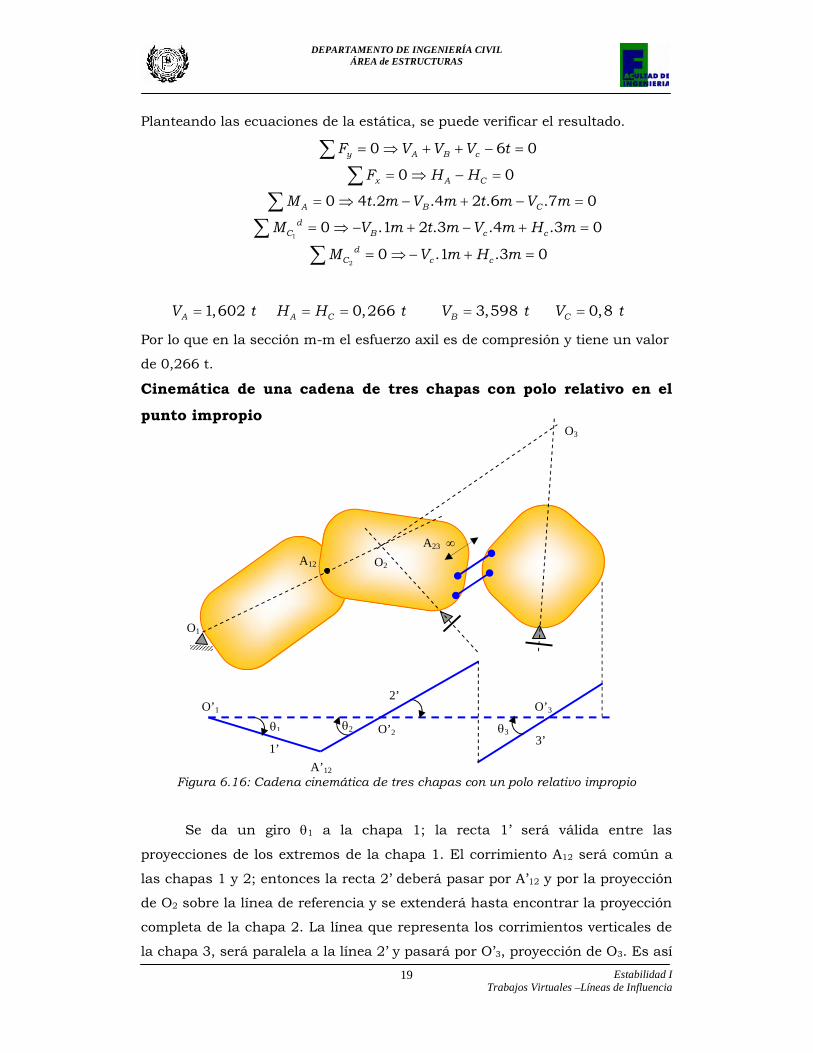
Planteando las ecuaciones de la estática, se puede verificar el resultado.
1
2
0 6 0
0 0
0 4 .2 .4 2 .6 .7 0
0 .1 2 .3 .4 .3 0
0
y A B c
x A C
A B C
dC B c c
dC
F V V V t
F H H
M t m V m t m V m
M V m t m V m H m
M
.1 .3 0c cV m H m
1,602 0,266 3,598 0,8A A C B CV t H H t V t V t
Por lo que en la sección m-m el esfuerzo axil es de compresión y tiene un valor
de 0,266 t.
Cinemática de una cadena de tres chapas con polo relativo en elpunto impropio
Figura 6.16: Cadena cinemática de tres chapas con un polo relativo impropio
Se da un giro 1 a la chapa 1; la recta 1’ será válida entre las
proyecciones de los extremos de la chapa 1. El corrimiento A12 será común a
las chapas 1 y 2; entonces la recta 2’ deberá pasar por A’12 y por la proyección
de O2 sobre la línea de referencia y se extenderá hasta encontrar la proyección
completa de la chapa 2. La línea que representa los corrimientos verticales de
la chapa 3, será paralela a la línea 2’ y pasará por O’3, proyección de O3. Es así
O1
O2
O3
A23
O’1
O’2
O’3
A12
A’12
1 2 3
1’
2’
3’
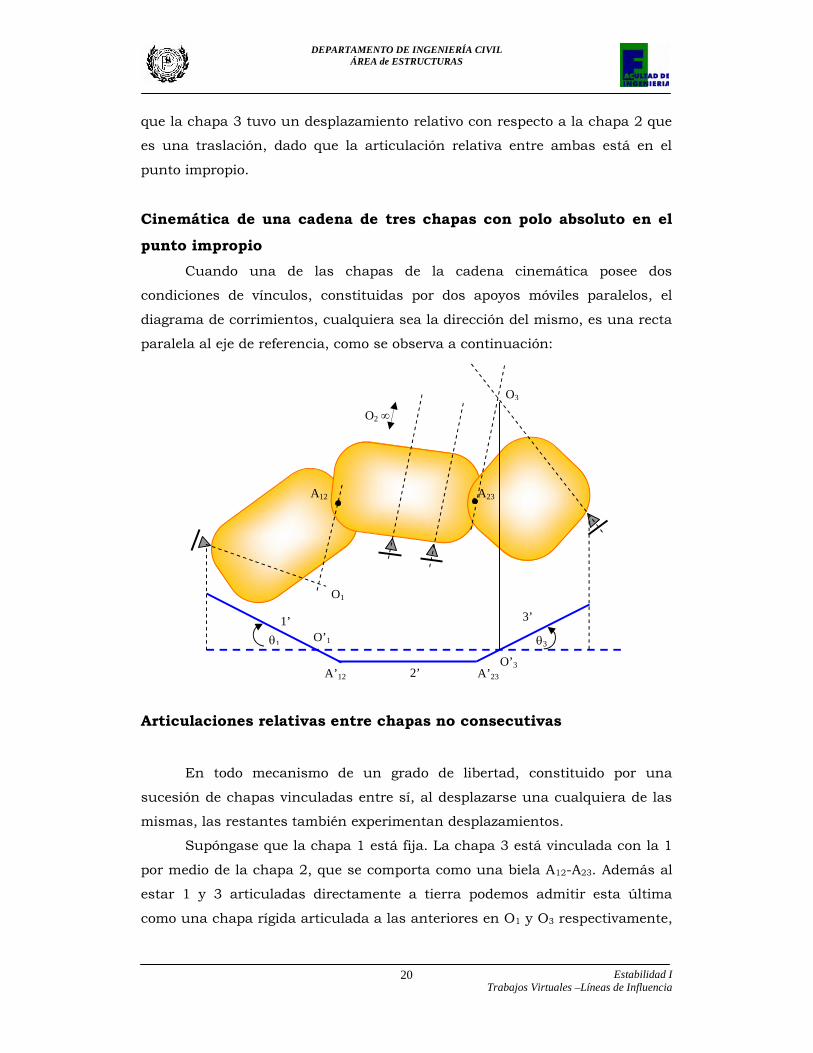
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
20
que la chapa 3 tuvo un desplazamiento relativo con respecto a la chapa 2 que
es una traslación, dado que la articulación relativa entre ambas está en el
punto impropio.
Cinemática de una cadena de tres chapas con polo absoluto en elpunto impropio
Cuando una de las chapas de la cadena cinemática posee dos
condiciones de vínculos, constituidas por dos apoyos móviles paralelos, el
diagrama de corrimientos, cualquiera sea la dirección del mismo, es una recta
paralela al eje de referencia, como se observa a continuación:
Articulaciones relativas entre chapas no consecutivas
En todo mecanismo de un grado de libertad, constituido por una
sucesión de chapas vinculadas entre sí, al desplazarse una cualquiera de las
mismas, las restantes también experimentan desplazamientos.
Supóngase que la chapa 1 está fija. La chapa 3 está vinculada con la 1
por medio de la chapa 2, que se comporta como una biela A12-A23. Además al
estar 1 y 3 articuladas directamente a tierra podemos admitir esta última
como una chapa rígida articulada a las anteriores en O1 y O3 respectivamente,
O1
O2
O3
A23
O’1
O’3
A12
A’12
1 3
1’
2’
3’
A’23
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
21
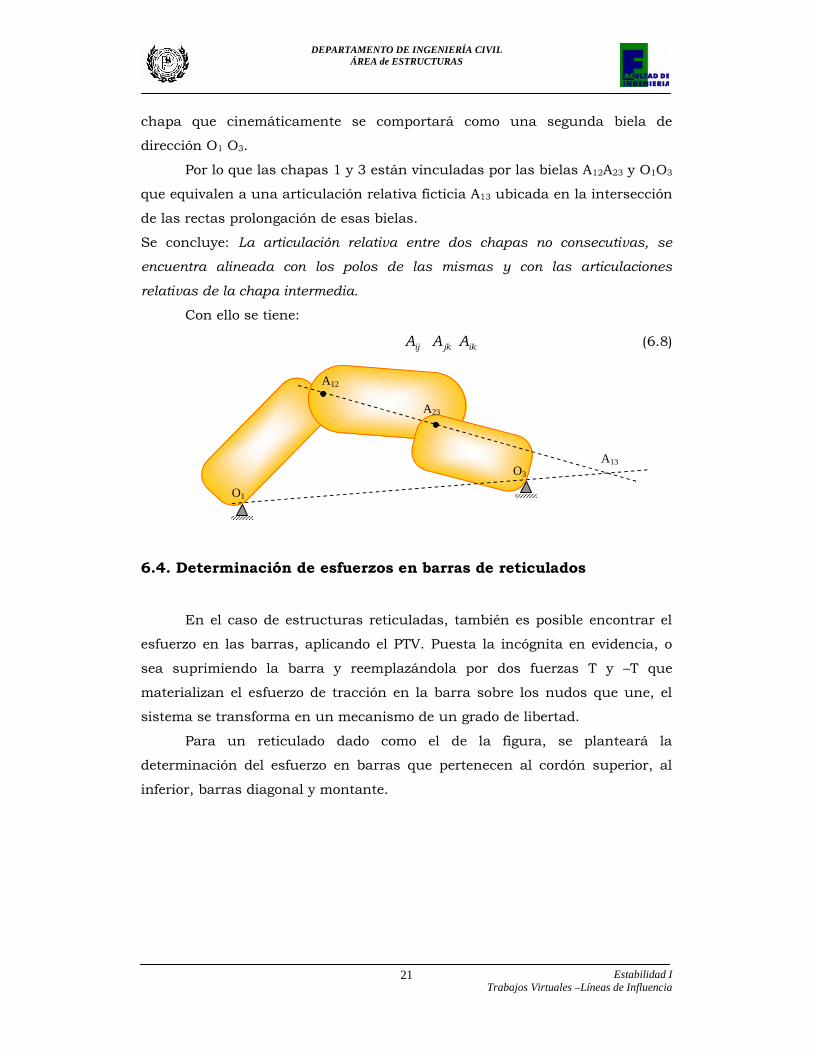
chapa que cinemáticamente se comportará como una segunda biela de
dirección O1 O3.
Por lo que las chapas 1 y 3 están vinculadas por las bielas A12A23 y O1O3
que equivalen a una articulación relativa ficticia A13 ubicada en la intersección
de las rectas prolongación de esas bielas.
Se concluye: La articulación relativa entre dos chapas no consecutivas, se
encuentra alineada con los polos de las mismas y con las articulaciones
relativas de la chapa intermedia.
Con ello se tiene:
ij jk ikA A A (6.8)
6.4. Determinación de esfuerzos en barras de reticulados
En el caso de estructuras reticuladas, también es posible encontrar el
esfuerzo en las barras, aplicando el PTV. Puesta la incógnita en evidencia, o
sea suprimiendo la barra y reemplazándola por dos fuerzas T y –T que
materializan el esfuerzo de tracción en la barra sobre los nudos que une, el
sistema se transforma en un mecanismo de un grado de libertad.
Para un reticulado dado como el de la figura, se planteará la
determinación del esfuerzo en barras que pertenecen al cordón superior, al
inferior, barras diagonal y montante.
O1
O3
A23
A12
A13
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
22
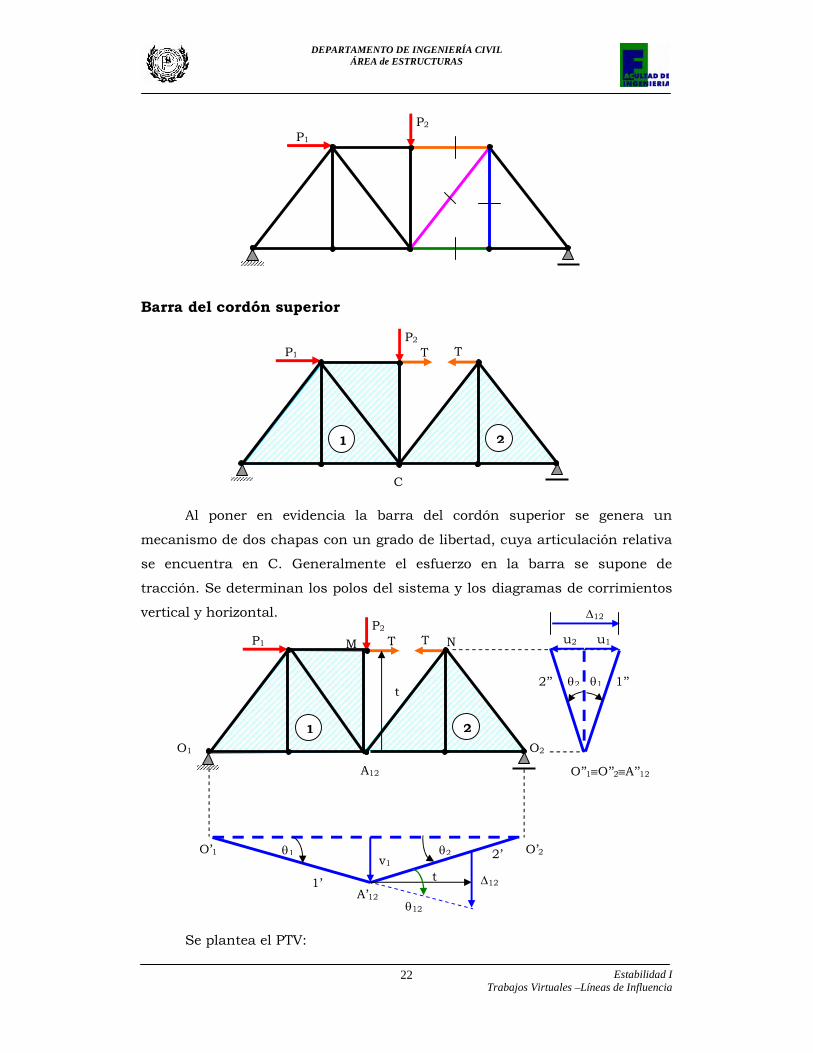
Barra del cordón superior
Al poner en evidencia la barra del cordón superior se genera un
mecanismo de dos chapas con un grado de libertad, cuya articulación relativa
se encuentra en C. Generalmente el esfuerzo en la barra se supone de
tracción. Se determinan los polos del sistema y los diagramas de corrimientos
vertical y horizontal.
Se plantea el PTV:
P1
P2
O1
O’1
P1
P2
T T
1 2
A12
O2
v11 2
1’
2’
t
t 12
O’2
A’12
1’’2’’ 12
u1 u2
12
M N
12
O’’1O’’2A’’12
P1
P2
T T
1 2
C
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
23
1 1 2 1 12. . . 0P u P v T (6.9)
En esta ecuación u1 se lee en el diagrama de corrimientos horizontales
dado que P1 es horizontal, a su vez como P1 actúa sobre la chapa 1 el
corrimiento correspondiente es el de la chapa 1 con respecto a la línea de
referencia. Como el sentido de la fuerza y el del corrimiento coinciden el
término de trabajo es positivo. Igualmente sucede con la fuerza P2, se lee sobre
el diagrama de corrimientos verticales el desplazamiento correspondiente.
También el trabajo que provoca es positivo. Con relación al esfuerzo T, existen
varias formas de determinar el signo del trabajo que produce. Como T es una
fuerza horizontal, se recurre al diagrama de corrimientos horizontales; la
fuerza T que actúa sobre la chapa 1 tiende a acercarla a la chapa 2 que se
considera fija, luego el corrimiento a leer será el que determina cómo se
desplazó la chapa 1 con relación a la chapa 2 considerada fija, es decir 12.
Como ambos, T y 12 tienen el mismo sentido, el término en la ecuación es
positivo.
Otra manera de proceder para determinar el signo de T en la ecuación
es utilizar el diagrama de corrimientos verticales: dado que ambas chapas
tienen su polo relativo en A12 se analiza el sentido de giro en que la fuerza T
del reticulado actuando sobre la chapa 1 tiende a girar alrededor de A12 , en
este caso el sentido es horario. Luego, sobre el diagrama de corrimientos
verticales se observa ubicados en A12 cómo giró la chapa 1 en relación a la
chapa 2 (12), en este caso horario, por lo cual el término en la ecuación de
trabajo será positivo. Dado que la fuerza T debe multiplicarse por un
desplazamiento, es que a partir de A12 se traslada en forma horizontal el valor
t, que es la distancia entre la dirección de T y la articulación relativa A12; por
su extremo se traza una línea perpendicular hasta intersecar a las chapas 1 y
2, obteniéndose 12.
Luego se despeja de la Ec. 6.9 la magnitud de T, la cual será negativa,
lo que implica que la barra está comprimida.
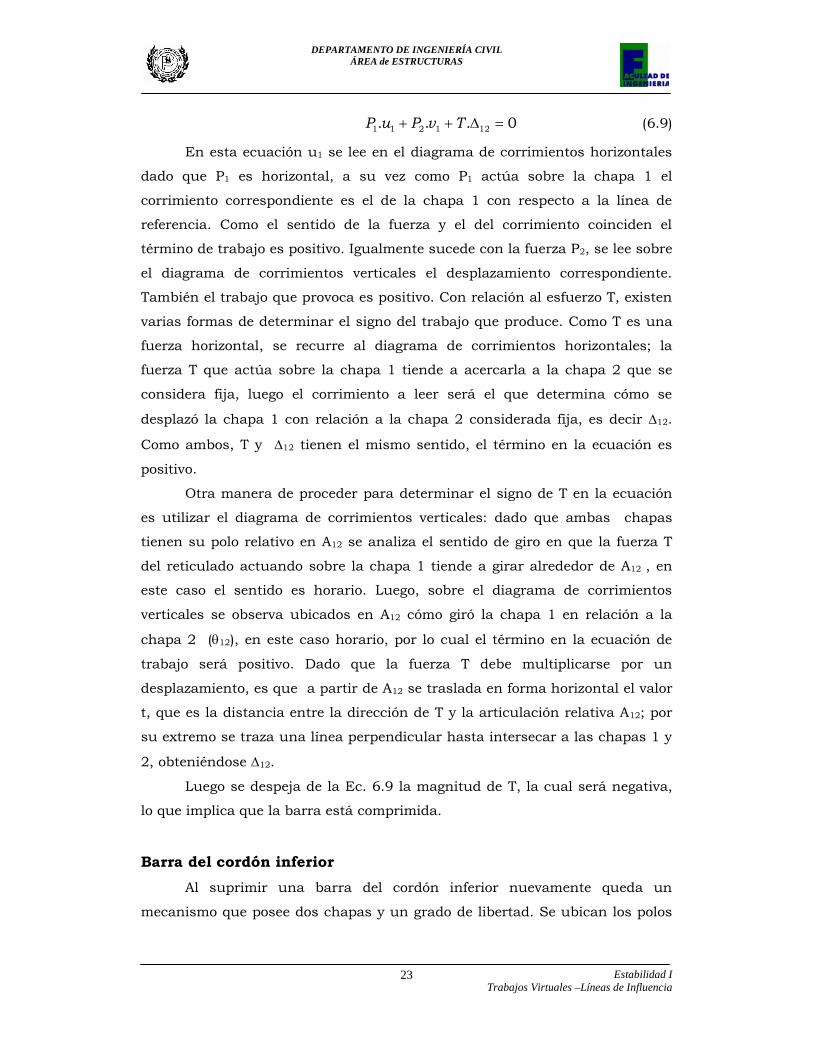
Barra del cordón inferiorAl suprimir una barra del cordón inferior nuevamente queda un
mecanismo que posee dos chapas y un grado de libertad. Se ubican los polos
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
24
absolutos y relativos para este nuevo esquema, y luego se procede al trazado
de los diagramas de corrimientos.
1 1 2 1 12. . . 0P u P v T (6.10)
En este caso, el signo del último término se debe a que T y 12 tienen
sentidos opuestos: la fuerza T actuando en la chapa 1 se dirige hacia la
derecha (chapa 2 fija) y en el diagrama de corrimiento horizontal el
desplazamiento de la chapa 1 con respecto a la 2 está dirigido hacia la
izquierda. De otro modo, T sobre chapa 1 tiende a girar en sentido antihorario
hacia la chapa 2 considerada fija, en el diagrama de corrimiento vertical el giro
de la chapa 1 con relación a la 2 es horario, lo que determina el signo
negativo.
De la Ec. 6.10, T resulta con signo positivo es decir que la barra está
traccionada como se ha supuesto.
O1
O’1
P1
P2
T T1 2
A12
O2
v11 2
1’2’
t
t
12
O’2
A’12
1’’
2’’1
2
u1
12
M N
12
O’’1
A’’12
O’’2
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
25
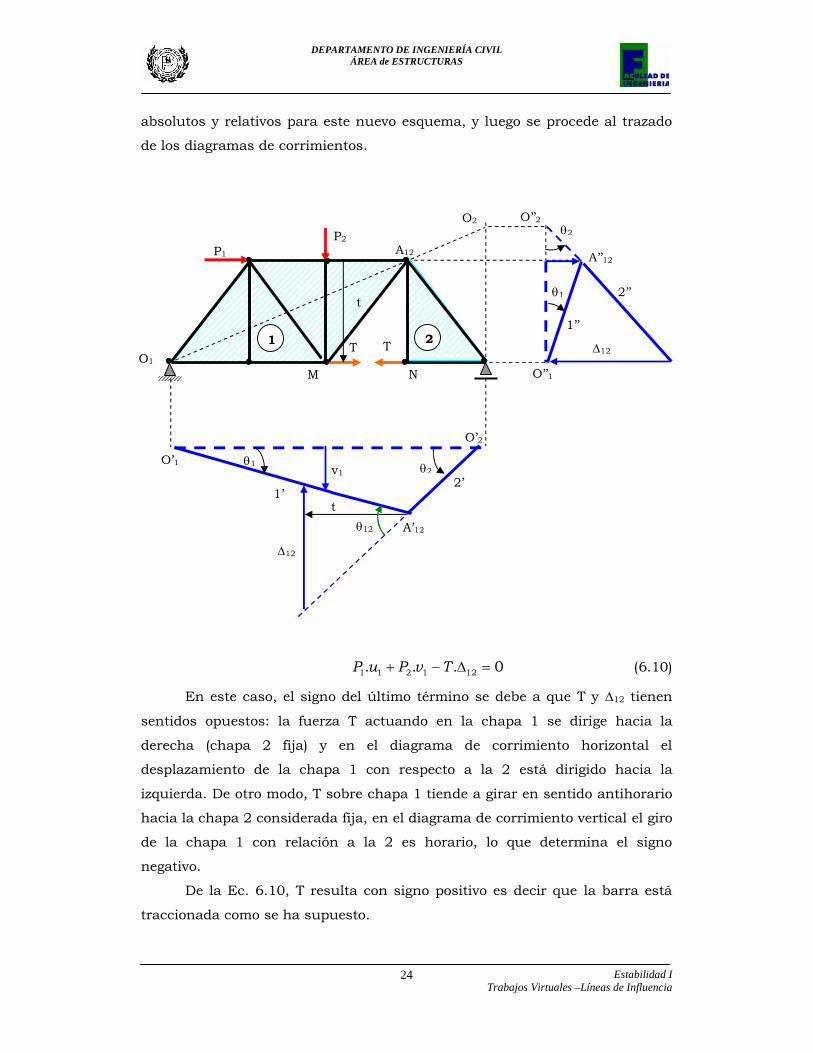
Barra diagonalSe procede a encontrar los polos del mecanismo que resulta con 4
chapas, dos de las cuales, se comportan son bielas paralelas (chapas 3 y4)
por lo cual sus polos relativos resultan en el punto impropio.
Luego se plantea el PTV:
1 1 2 1 14P . P .v T. 0 (6.11)
De la Ec. (6.11), T resultará con signo positivo, es decir la barra está
traccionada, como se supuso.
Barra montanteSe observa que las fuerzas P1 y P2 no realizan trabajo, dado que actúan
sobre la chapa 1 que no tiene movilidad, por lo tanto el trabajo ejercido por la
barra T también será nulo, así el esfuerzo T es cero.
O1
O’1
P1
P2
T
T
1 2
A13
O2
v1134
1’
2’
t
14
O’2
A’14A’13
1’’2’’
1 2
u1
14
3
4A14 A24
A23A34
O4
A12
O3
O’4O’3
A’24A’23
3’4’
2
O’’1O’’2A’’23
O’’3A’’13
A’’14A’’24
O’’4
t
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
26
Líneas de influenciaEn los ítems anteriores se analizaron estructuras que soportaban
cargas fijas. Ya sea en el caso de vigas, reticulados o pórticos, si las funciones
buscadas eran corte, reacciones, fuerzas en los elementos, etc. las cargas
ocupaban posiciones fijas. En la práctica se presentan estructuras sujetas a
cargas que se mueven a lo largo de sus claros; el ejemplo más evidente es el de
los puentes sujetos a tránsito vehicular, pero los edificios industriales con
grúas viajeras, las estructuras que soportan bandas transportadoras, etc.
también se incluyen.
Las posiciones críticas para colocar las cargas vivas no son las mismas
en todos los elementos. Por ejemplo, la carga máxima en una barra de un
reticulado de un puente puede ocurrir cuando una línea de camiones abarque
todos los claros, mientras que la fuerza máxima en alguna otra barra puede
ocurrir cuando los camiones se sitúan en una sola parte del puente. Lo mismo
puede suceder en un edificio.
A veces, es posible determinar por inspección dónde colocar las cargas
para obtener las fuerzas críticas, pero en muchas otras ocasiones es necesario
recurrir a ciertos criterios y diagramas para encontrar esas secciones. El más
útil de esos recursos es la línea de influencia.
Definición de línea de influenciaLa línea de influencia utilizada por primera vez por Winkler (1867,
Berlín), muestra de manera gráfica cómo el movimiento de una carga unitaria
O’1 3 4
1’
4’O’4
O’3
3’
O’2
A’34
2’
O1
P1
P2
TT
1 2
A13A23
O3
O4 t
1’’2’’
3 4
A12O2
A34
A24
O’’1O’’3O’’4A’’13A’’34A’’24
O’’2
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
27
a lo largo de una estructura afecta a los elementos mecánicos en ésta. Los
elementos mecánicos que pueden representarse son momentos flectores,
esfuerzos cortantes, normales, así como reacciones.
Una línea de influencia puede definirse como un diagrama cuyas
ordenadas muestran la magnitud y el carácter de algún elemento mecánico de
una estructura cuando una carga unitaria se mueve a lo largo de ésta. Cada
ordenada del diagrama da el valor del elemento mecánico cuando la carga está
situada en el lugar asociado a esa ordenada en particular.
Las líneas de influencia se utilizan para determinar dónde colocar las
cargas vivas para que éstas causen “fuerzas” máximas. También pueden
utilizarse para calcular dichas fuerzas. El estudio de las líneas de influencia es
una herramienta más que permite conocer cómo se ve afectada una estructura
bajo diferentes condiciones de carga.
Método cinemático para el trazado de las líneas de influenciaEste método consiste en trazar los diagramas de corrimientos para la
estructura en estudio, como se hizo en lo desarrollado anteriormente, con la
diferencia de que sobre la estructura no actúan cargas fijas sino una carga
móvil, a la que se le asigna un valor unitario. Para que ese diagrama de
corrimientos represente una línea de influencia se deberá leer en una
determinada escala y deberá tener un signo.
Se muestra en lo que sigue cómo determinar la línea de influencia de
las reacciones, esfuerzos característicos y esfuerzos en barras de reticulados
para los ejemplos vistos.
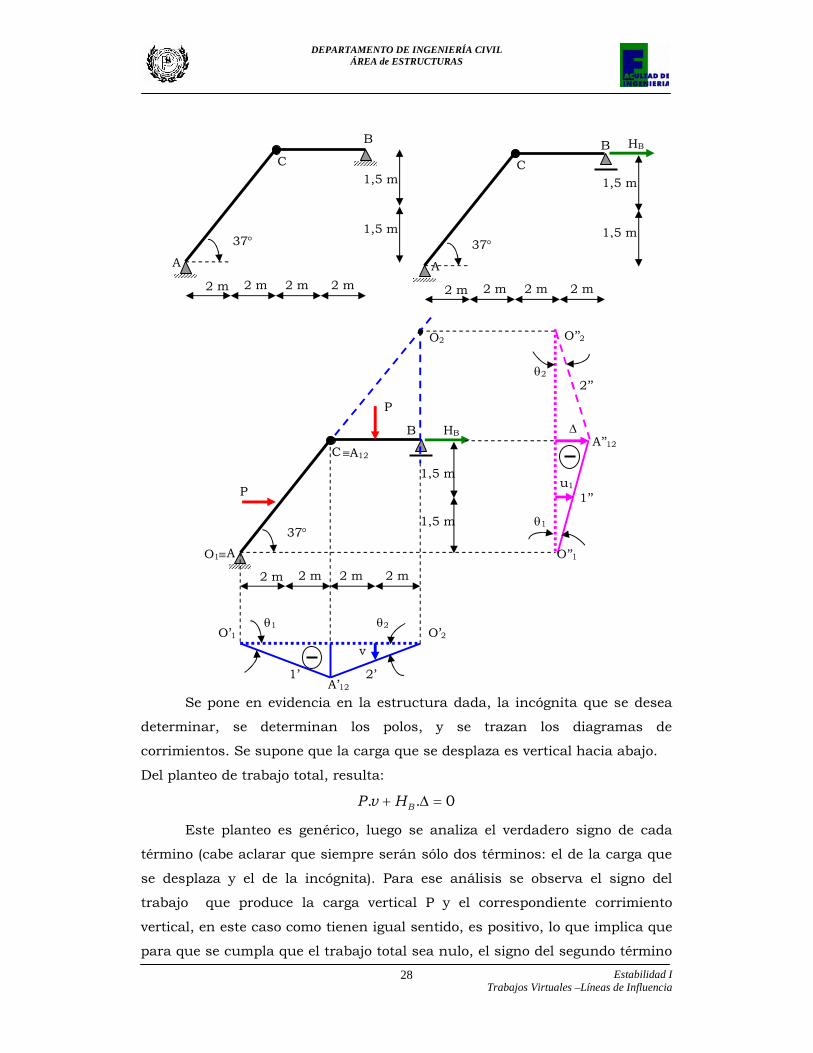
Línea de influencia de la reacción horizontal en BDado que es necesario trazar diagramas de corrimientos, todo lo visto
anteriormente al respecto es aplicable.
Luego, se posiciona una carga P=1t, que podrá ser vertical u horizontal,
en alguna sección de la estructura, seguidamente se planteará la nulidad del
trabajo ejercido por la fuerza activa P y por la incógnita del problema, de la
cual surgirá el signo de la línea de influencia y se determinará la escala en la
que deben leerse las ordenadas.
Ejemplo: Determinar la línea de influencia de la reacción horizontal B.
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
28
Se pone en evidencia en la estructura dada, la incógnita que se desea
determinar, se determinan los polos, y se trazan los diagramas de
corrimientos. Se supone que la carga que se desplaza es vertical hacia abajo.
Del planteo de trabajo total, resulta:
. . 0BP v H
Este planteo es genérico, luego se analiza el verdadero signo de cada
término (cabe aclarar que siempre serán sólo dos términos: el de la carga que
se desplaza y el de la incógnita). Para ese análisis se observa el signo del
trabajo que produce la carga vertical P y el correspondiente corrimiento
vertical, en este caso como tienen igual sentido, es positivo, lo que implica que
para que se cumpla que el trabajo total sea nulo, el signo del segundo término
A
B
C
2 m 2 m 2 m 2 m
1,5 m
1,5 m 37
A
BC
2 m 2 m 2 m 2 m
1,5 m
1,5 m 37
HB
O1A
B
C
P
2 m 2 m 2 m 2 m
1,5 m
1,5 m 37
HB
A12
O2
O’1 O’2
A’12
1 2
v
1’ 2’
O’’1
O’’2
A’’12
1
2
1’’
2’’
u1
P
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
29
deberá ser negativo. Esto significa que la reacción horizontal y su
correspondiente corrimiento deberán tener sentidos opuestos. Como esto no se
cumple (reacción supuesta y corrimiento tienen el mismo sentido) entonces se
coloca signo negativo donde se ha ubicado la carga P. Luego despejando de la
expresión de trabajo se determinará el valor de HB. Como a la carga P se le
asigna un valor unitario, el verdadero valor de HB surgirá de multiplicar a P
por su verdadero valor. La escala está dada por 1/. En esa escala se deberán
leer las ordenadas de los diagramas; que representan el valor de la reacción HB
cuando la carga está ubicada en dicha ordenada.
Ese signo tiene la siguiente interpretación: Cuando una carga
concentrada hacia abajo se desplace sobre la estructura desde A hasta B, la
reacción horizontal en B tendrá sentido contrario al supuesto.
Si las cargas que se desplazan fuesen horizontales, el corrimiento
correspondiente se leerá sobre el diagrama de elaciones horizontal, efectuando
un análisis análogo al anterior para establecer el signo. Para este caso
también surge que la línea de influencia es negativa, y su significado implica
que, cuando sobre la estructura se desplaza una carga horizontal hacia la
derecha, el sentido de la reacción horizontal en B es contrario al supuesto.
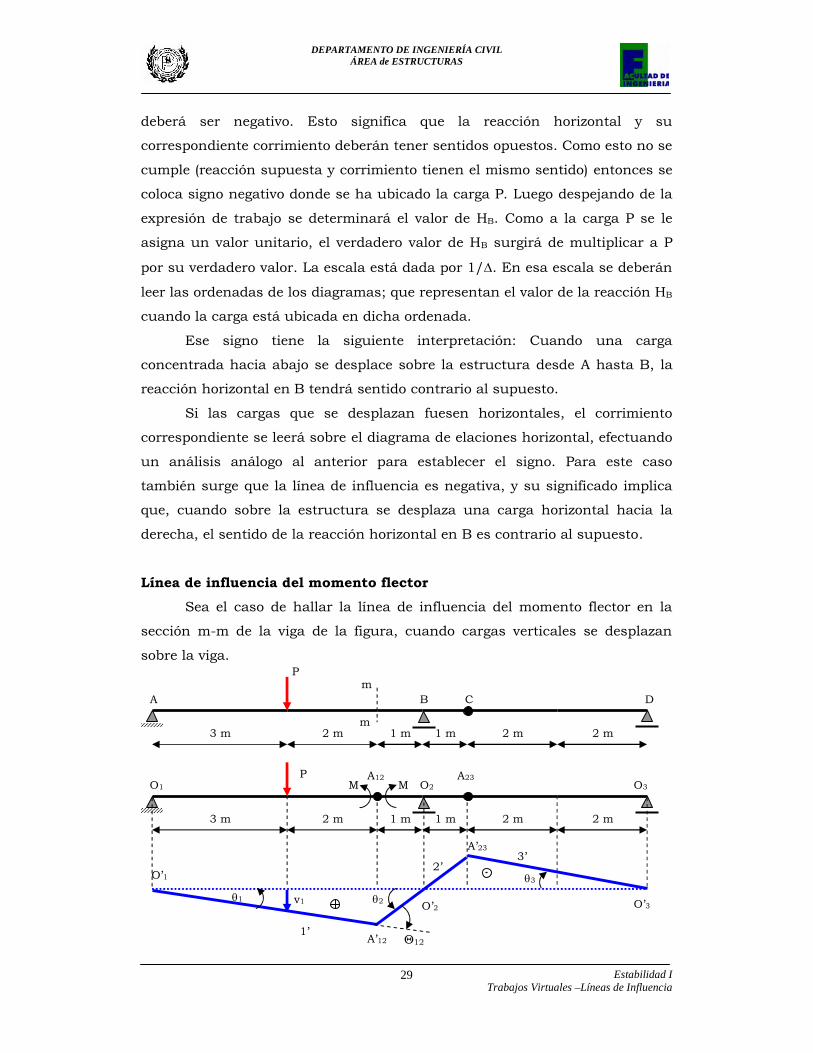
Línea de influencia del momento flectorSea el caso de hallar la línea de influencia del momento flector en la
sección m-m de la viga de la figura, cuando cargas verticales se desplazan
sobre la viga.
3 m 2 m 1 m 1 m 2 m 2 m
A B C D m
m
P
3 m 2 m 1 m 1 m 2 m 2 m
PO2 O1
m
A12
m A23
m O3
1
m O’2
O’1m
O’3
A’12
m
A’23
m
2
m
3
m v1
m
1’m
2’m
3’m
M M
Θ12
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
30
El diagrama de corrimientos ya fue trazado cuando se determinó el
momento flector en m-m aplicando el PTV.
La ecuación de trabajo para el caso que nos ocupa es:
0.. 12 MvP
El primer término es positivo, carga y corrimiento tienen igual sentido,
luego M que actúa sobre la chapa 1, tiene sentido antihorario, y sobre el
diagrama de corrimiento el giro que efectúa la chapa 1 con respecto a la chapa
2 es horario por lo cual produce trabajo negativo que coincide con el que debe
tener el segundo término del trabajo para que se cumpla su nulidad. Esto
implica que la línea de influencia tendrá signo positivo en el sector donde
actúa la carga P, el sector de línea de influencia que queda al otro lado de la
línea de referencia tendrá signo negativo. Eso significa, que cuando la carga
vertical se desplace desde A hasta B el momento flector tiene el signo supuesto
(positivo), pero cuando se desplace desde B hasta D tendrá signo contrario al
que supuesto, o sea negativo.
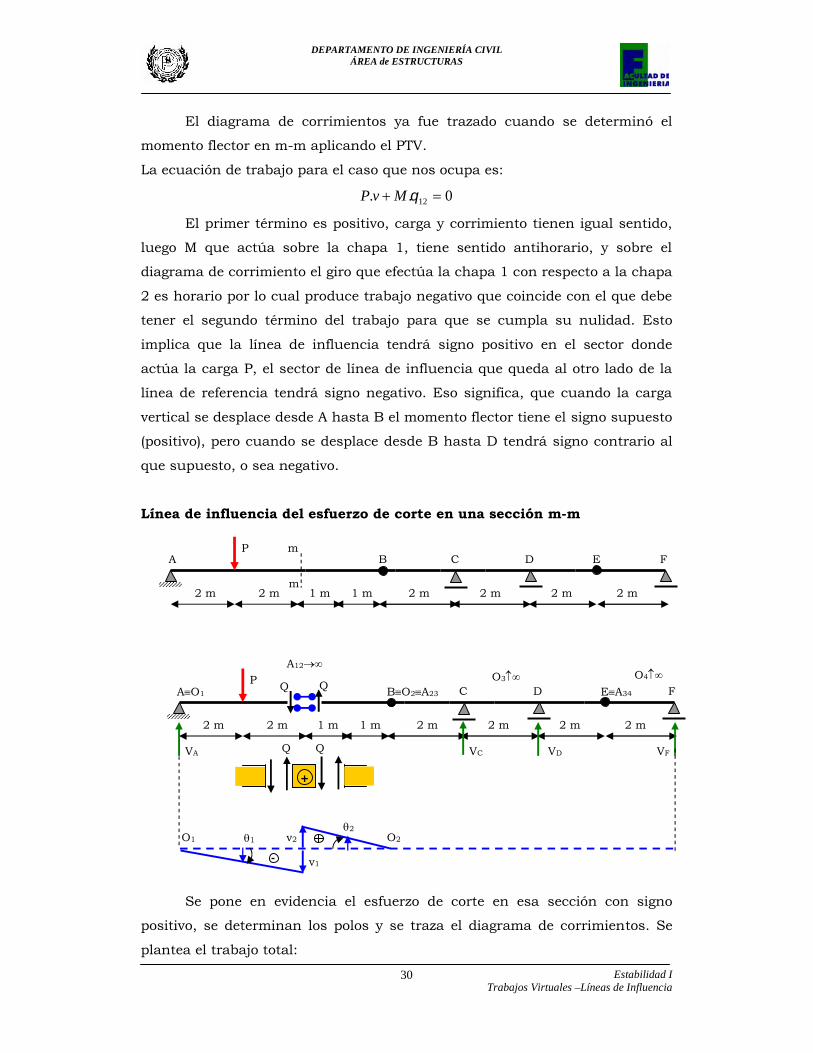
Línea de influencia del esfuerzo de corte en una sección m-m
Se pone en evidencia el esfuerzo de corte en esa sección con signo
positivo, se determinan los polos y se traza el diagrama de corrimientos. Se
plantea el trabajo total:
2 m 1 m 2 m 2 m 2 m 2 m
PA B C D
1 m 2 m
E Fm
m
2 m 1 m 2 m 2 m 2 m 2 m
PAO1 BO2A23 C D
1 m 2 m
EA34 F Q Q
+
Q Q VA VC VD VF
O3 O4
O2O1
v1
v212
A12
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
31
0.. 12 QvP
El trabajo de la fuerza P es positivo entonces el que efectúe el corte
deberá ser negativo. El corte Q sobre la chapa 1 es positivo, ya que actuando
sobre el extremo derecho de la chapa 1 está dirigido hacia abajo, luego el
desplazamiento que efectuó la chapa 1 con respecto a la chapa 2, (∆12) es
hacia abajo, o se el trabajo es positivo, esto significa que el signo de la línea de
influencia donde actúa la carga será negativa. El diagrama que queda por
encima de la línea de referencia será positivo. La escala está representada por
1/∆12. El valor de Q se obtiene de la ecuación anterior. El signo de esta línea
de influencia indica que cuando la carga vertical se desplaza desde A hasta la
sección m-m el esfuerzo de corte tiene sentido contrario al supuesto, es decir
negativo; mientras cuando se desplaza desde la sección m-m hasta B tiene el
sentido supuesto, es decir positivo. Cada ordenada de la línea de influencia
representa en la escala 1/∆12 el valor del esfuerzo de corte cuando la carga
ocupa la posición de esa ordenada.
En este ejemplo, cuando la carga se desplace en el tramo BF, el esfuerzo
de corte en la sección m-m será nulo.
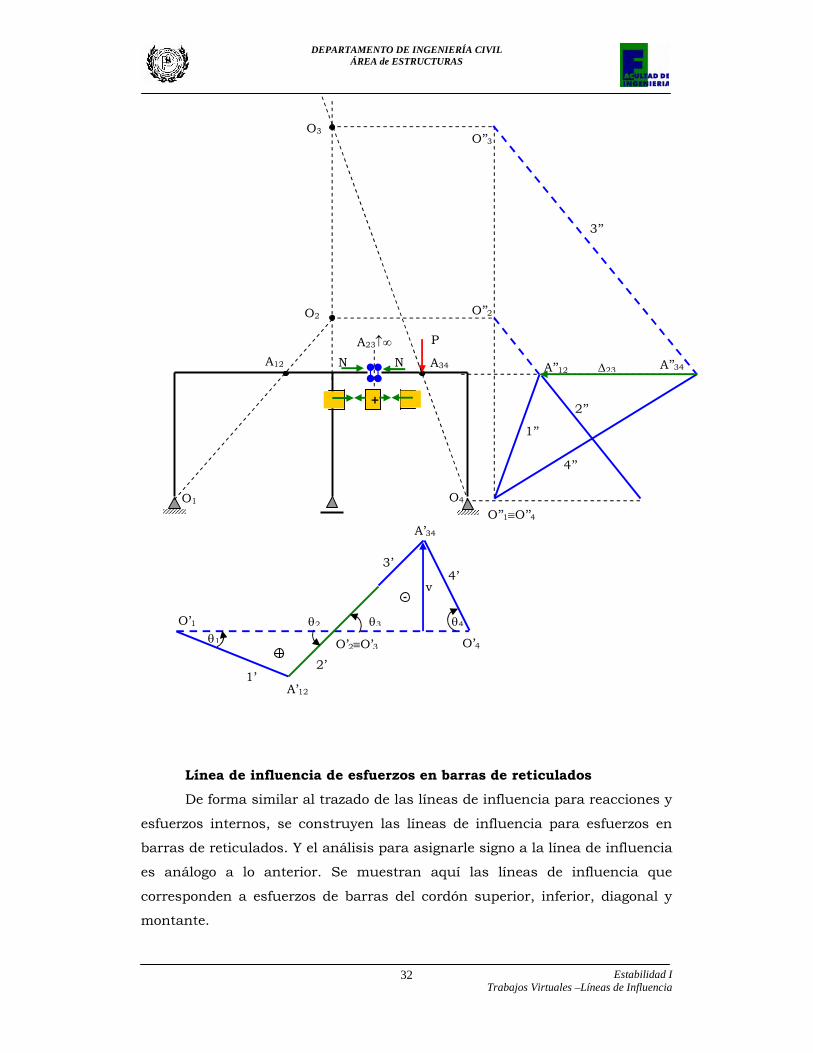
Línea de influencia del esfuerzo axilDe igual forma se toma para el caso de encontrar la línea de influencia del
esfuerzo axil, el ejemplo presentado para hallar ese esfuerzo aplicando el PTV.
Se transcribe el diagrama que se obtenido oportunamente.
0.. 23 NvP
El primer término es negativo, el segundo debe ser positivo. El esfuerzo
axil sobre la chapa 2, está dirigido hacia la derecha, el corrimiento de la chapa
2 con respecto a la 3 es hacia izquierda, el trabajo es negativo contrario a lo
que debe darse para que el trabajo total se anule. Es así que la línea de
influencia tendrá signo negativo en el tramo donde actúa la carga P. El otro
tramo será positivo.
La escala es 1/∆23. El signo indica que cuando la carga vertical se
desplace desde el apoyo izquierdo hasta la columna central el esfuerzo axil en
la sección m-m tendrá el mismo signo que se supuso es decir positivo, cuando
se ubique desde esa columna hasta el apoyo de la derecha será negativo.
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
32
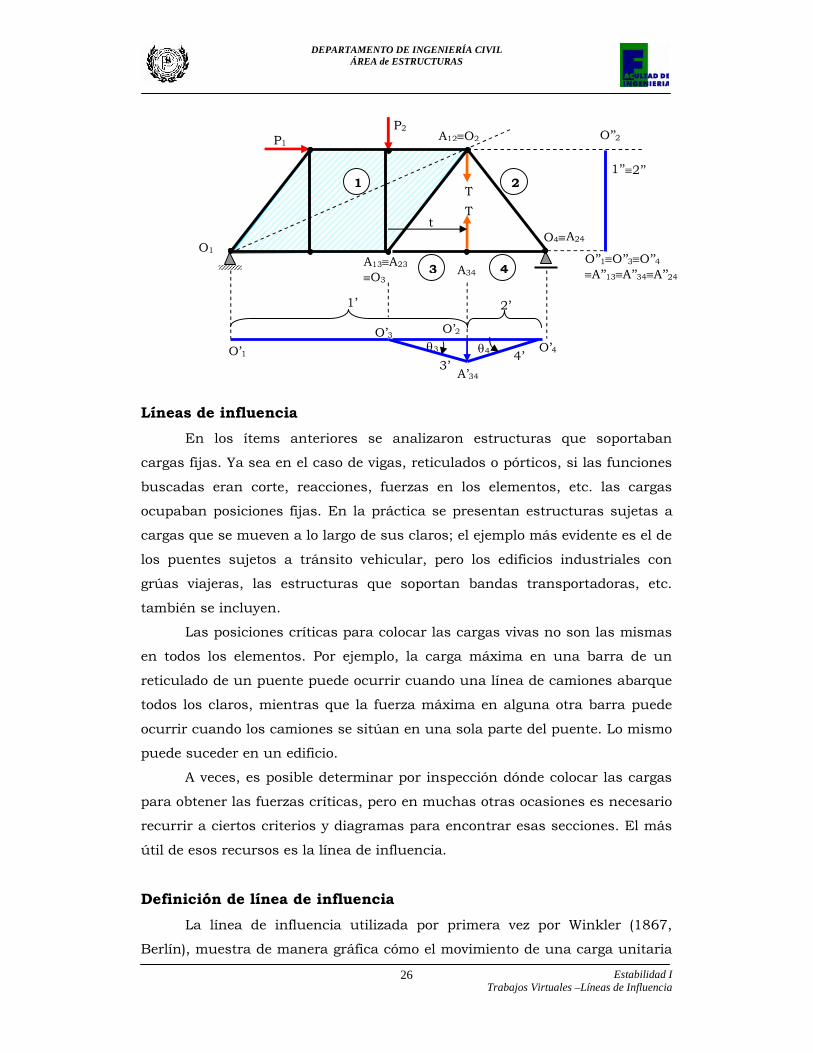
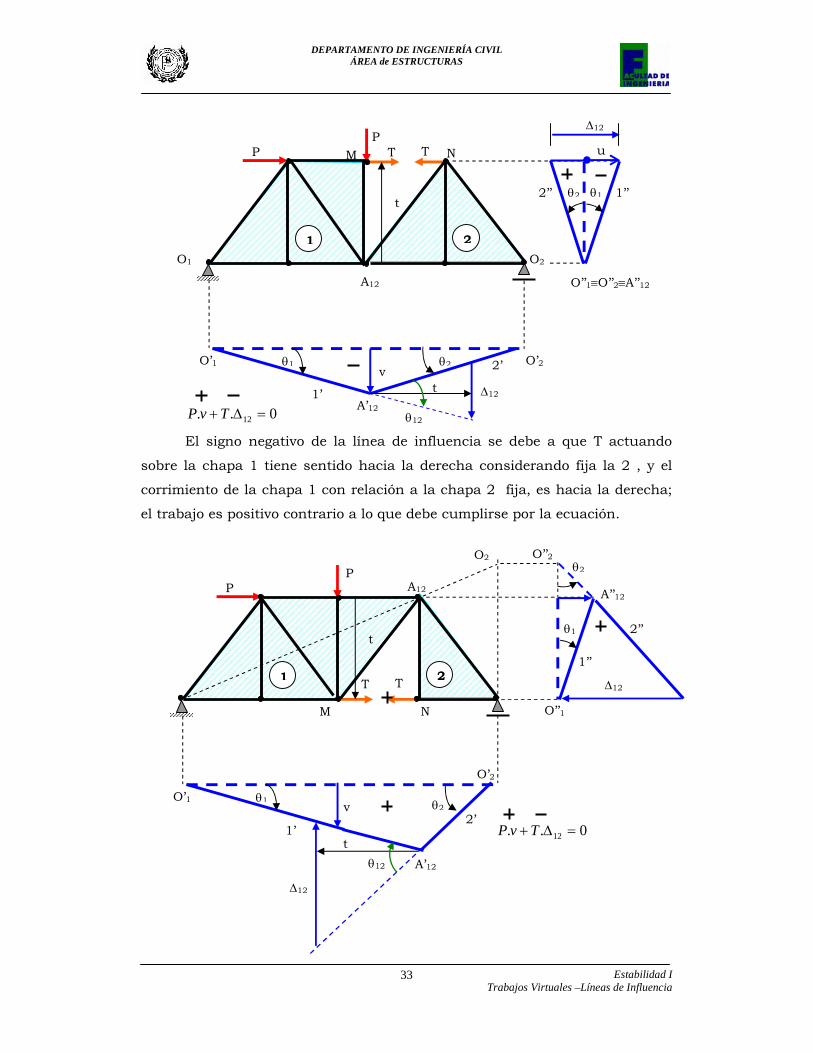
Línea de influencia de esfuerzos en barras de reticuladosDe forma similar al trazado de las líneas de influencia para reacciones y
esfuerzos internos, se construyen las líneas de influencia para esfuerzos en
barras de reticulados. Y el análisis para asignarle signo a la línea de influencia
es análogo a lo anterior. Se muestran aquí las líneas de influencia que
corresponden a esfuerzos de barras del cordón superior, inferior, diagonal y
montante.
1
2 3 4
v
1’ 2’
3’ 4’
O’1
O’2O’3 O’4
A’12
A’34
A23
N
P
O1 O4
NA12 A34
O2
O3
23
1’’
4’’
2’’
O’’1O’’4
O’’2
O’’3
A’’12 A’’34
3’’
+
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
33
0.. 12 TvP
El signo negativo de la línea de influencia se debe a que T actuando
sobre la chapa 1 tiene sentido hacia la derecha considerando fija la 2 , y el
corrimiento de la chapa 1 con relación a la chapa 2 fija, es hacia la derecha;
el trabajo es positivo contrario a lo que debe cumplirse por la ecuación.
0.. 12 TvP
O1
O’1
PP
T T
1 2
A12
O2
v1 2
1’
2’
t
t 12
O’2
A’12
1’’2’’ 12
u
12
M N
12
O’’1O’’2A’’12
O’1
PP
T T1 2
A12
O2
v1 2
1’2’
t
t
12
O’2
A’12
1’’
2’’1
2
u1
12
M N
12
O’’1
A’’12
O’’2
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
34
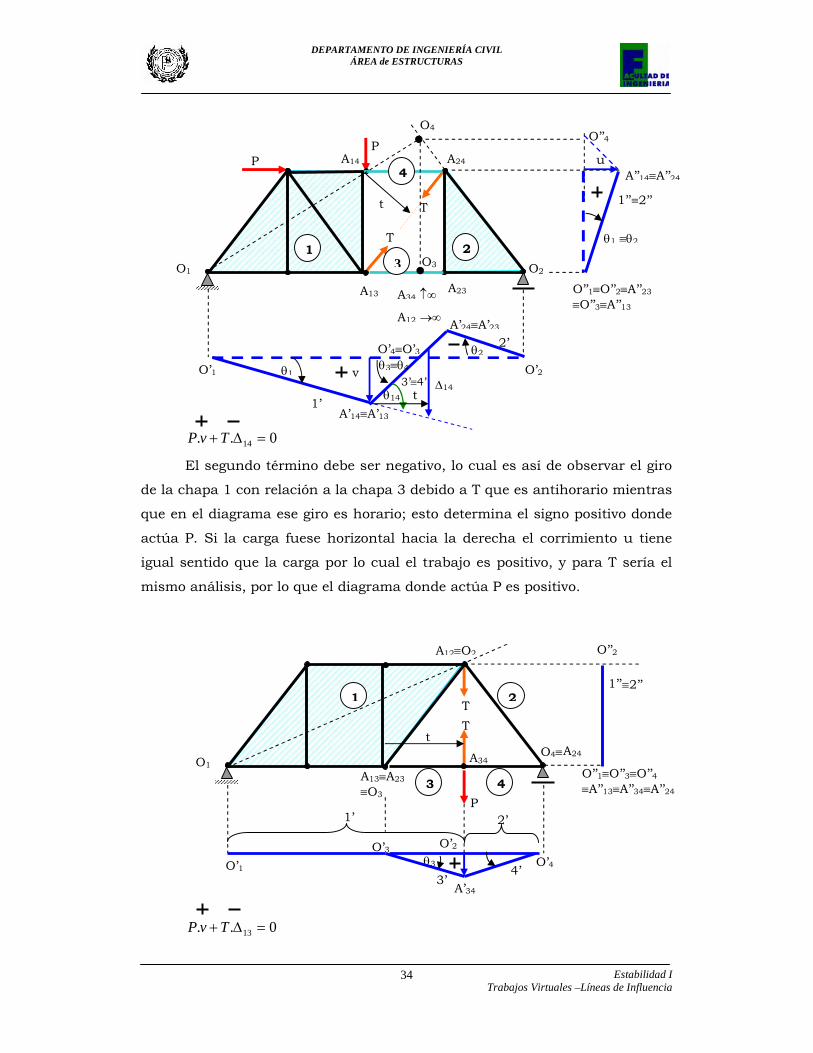
0.. 14 TvP
El segundo término debe ser negativo, lo cual es así de observar el giro
de la chapa 1 con relación a la chapa 3 debido a T que es antihorario mientras
que en el diagrama ese giro es horario; esto determina el signo positivo donde
actúa P. Si la carga fuese horizontal hacia la derecha el corrimiento u tiene
igual sentido que la carga por lo cual el trabajo es positivo, y para T sería el
mismo análisis, por lo que el diagrama donde actúa P es positivo.
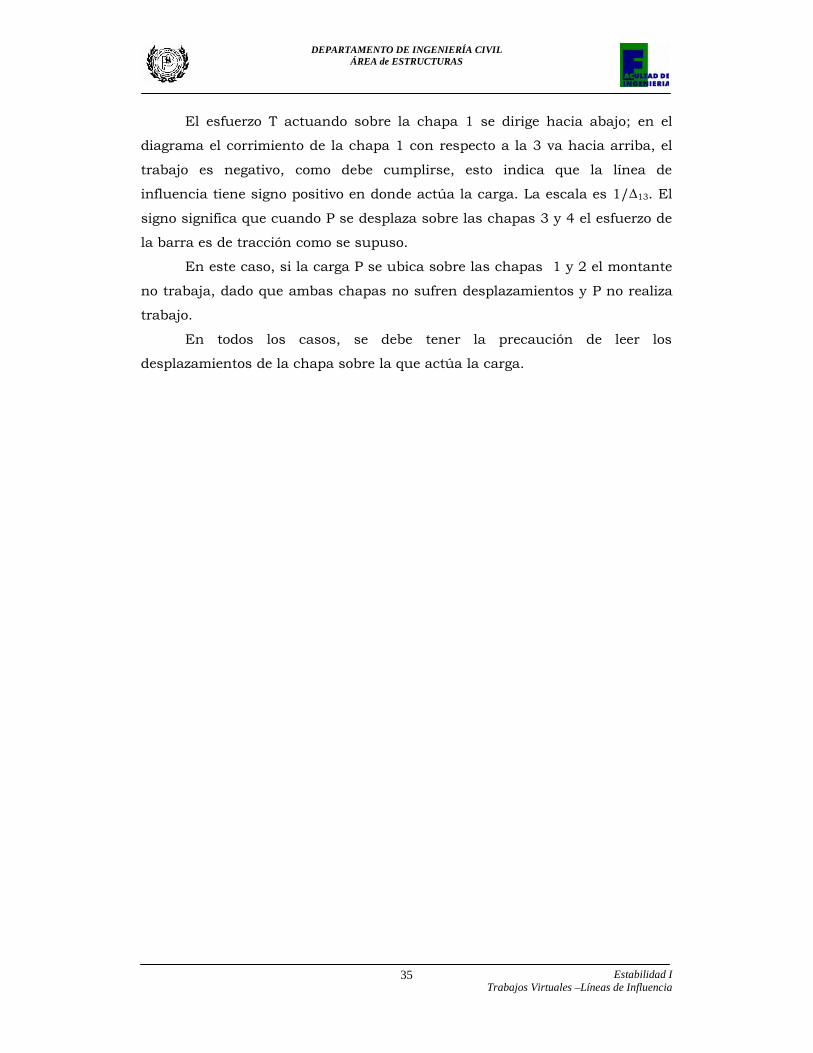
0.. 13 TvP
O’1 3
1’
4’O’4
O’3
3’
O’2
A’34
2’
O1
P
TT1 2
A13A23
O3
O4 t
1’’2’’
3 4
A12O2
A34A24
O’’1O’’3O’’4A’’13A’’34A’’24
O’’2
O4
O1
O’1
PP
T
T
1 2
A13
O2
v134
1’
2’
t
14
O’2
A’14A’13
1’’2’’
1 2
u
14
3
4A14 A24
A23A34
A12
O3
O’4O’3
A’24A’23
3’4’
2
O’’1O’’2A’’23
O’’3A’’13
A’’14A’’24
O’’4
t
DEPARTAMENTO DE INGENIERÍA CIVILÁREA de ESTRUCTURAS
Estabilidad ITrabajos Virtuales –Líneas de Influencia
35
El esfuerzo T actuando sobre la chapa 1 se dirige hacia abajo; en el
diagrama el corrimiento de la chapa 1 con respecto a la 3 va hacia arriba, el
trabajo es negativo, como debe cumplirse, esto indica que la línea de
influencia tiene signo positivo en donde actúa la carga. La escala es 1/∆13. El
signo significa que cuando P se desplaza sobre las chapas 3 y 4 el esfuerzo de
la barra es de tracción como se supuso.
En este caso, si la carga P se ubica sobre las chapas 1 y 2 el montante
no trabaja, dado que ambas chapas no sufren desplazamientos y P no realiza
trabajo.
En todos los casos, se debe tener la precaución de leer los
desplazamientos de la chapa sobre la que actúa la carga.
Recommended

















