Embed Size (px)
Citation preview
Tablet Bilgisayarla Kontrol Edilen Kablosuz Keşif Robotu Tasarımı
Wireless Mobile Robot Design Controlling With Tablet Computer
Murat Demirtaş1, Mehmet Sağbaş1, Gökalp Tulum1, Ali Akman2
1 Elektrik Elektronik Mühendisliği Bölümü, Yeni Yüzyıl Üniversitesi, Zeytinburnu,
İstanbul 34010, Türkiye
2 Bilgisayar Mühendisliği Bölümü, Maltepe Üniversitesi, Maltepe, İstanbul 34857,
Türkiye
Özet: Bu çalışmada, üzeri sensörler ve farklı özellikte iki kamera ile donatılmış,
kablosuz haberleşme teknolojisi ile Windows veya Android işletim sistemine sahip olan
Tablet bilgisayarlardan kontrol edilebilen bir keşif robotu tasarlanıp gerçekleştirilmiştir.
Keşif robotu, üzerinde açık kaynak Linux işletim sistemi kullanılan ARM mikroişlemci
mimarisi tabanlı bir gömülü sistem barındırmaktadır.
Keşif robotu ve kontrolör birimi olarak kullanılan Tablet bilgisayar, birbirleriyle Wi-Fi
protokolü üzerinden soket haberleşmesi ile haberleşmektedirler. Keşif robotunda
bulunan yüksek çözünürlüklü kamera ve gece görüş kamerası gerçek zamanlı olarak
kontrolör tabletin ekranına kamera görüntülerini yollamaktadır. Keşif robotunu kontrol
edebilmek için geliştirilen Tablet bilgisayar arayüz programında, keşif robotundan
alınan MJPEG formatında kamera görüntüleri, sensör verileri ve keşif robotunu hareket
ettirebilmek için gerekli butonlar bulunmaktadır.
Bu sayede kullanıcının keşif robotunu uzak mesafelerden, kameralar vasıtasıyla
kablosuz olarak hareket ettirebilmesi, sensör verilerini okuyabilmesi, ortam dinlemesi
yapabilmesi ve görüntü işleme yapabilmesi sağlanmıştır.
Anahtar Kelimeler: Mobil Keşif Robotu, Kablosuz Haberleşme, Windows, Android,
Tablet PC, Görüntü İşleme, Wi-Fi, OpenCV, Raspberry Pi
Abstract: In this work, a wireless mobile robot equipped with sensors and two cameras
with different properties, that can be controlled from a tablet computer with the
Windows and Android operating system with wireless communication technology, has
been designed and realized. Mobile robot contains an embedded system which based on
the open source Linux operating system used ARM microprocessor architecture.
Mobile robot and the tablet used for controllor unit communicate with socket
communications protocol over Wi-Fi with one another. The HD camera and night vision
camera send the camera images in a continuous way the tablet's screen. Developed
Tablet PC interface program to control discovery robot, MPJEG format received from
the camera images, sensor data, and robot exploration in order to move with the
necessary buttons.
In this way, user can control discovery robot from a distance, can read sensor data, can
move to discovery robot over wireless with camera support, is provided to be able to
make image processing and listening environment.
Keywords: Mobile Discovery Robot, Wireless Communication, Windows, Android,
Tablet PC, Image Processing, Wi-Fi, OpenCV, Raspberry Pi
1. Giriş
Günümüzün gelişen teknolojisinde, gerçekleştirilmesi zor ve tehlikeli işlerde insanların
yerini yavaş yavaş endüstriyel ve hareketli robot uygulamaları almaktadır. Endüstriyel
robotlar genellikle sabit konumlu olup endüstriyel üretim süreçlerinin otomasyonuna
hizmet ederler. Öte yandan hareketli robotlar insanlar tarafından yapılan bir takım
işlerde yardımcı görevini üstlenirler. Bu tip robotların insanlara sağladığı faydaların
arttırılabilmesi için otonom işlevleri yerine getirebilecek robotlara ihtiyaç duyulur [1].
İnsan hayatının tehlikede olabileceği durumlarda (yangın, terör, deprem vb.), bilgi
toplanması ve toplanan bilgileri bir merkez istasyona kablosuz iletişimle bildirilmesi
için otonom bir sisteme ihtiyaç vardır. Bu şekilde insan erişiminin zor olduğu
bölgelerde de bilgi toplanabilecek ve böylece can kaybı en aza indirilecektir.
Elektroniğin ve programcılığın gelişimi ile birlikte uzaktan kontrol edilebilen sistemler
kendini göstermeye daha çok başlamıştır. Böylece amaca yönelik farklı türlerde robotlar
günlük hayatımıza girmiştir. Özellikle gömülü sistem programcılığının kolaylaşması ve
algoritma kurma becerilerinin açık kaynak olarak paylaşılabilmesi sayesinde akıllı
sistemler uygulamaları daha da arttırmıştır [2-6].
Bu çalışmada, üzerinde farklı amaçlar için kullanılmak üzere çeşitli sensörler ve 1080p
HD çekim yapabilme özelliği bulunan iki kamera ile donatılmış bir keşif robotu
tasarlanıp gerçekleştirilmiştir. Bu sistem, keşif robotuna yerleştirilen sensörler ile hedef
alan hakkında bilgi sahibi olmaya, kamera görüntülerini kontrol birimi olan tablet
üzerinde görüntüleyerek kullanıcının keşif robotunu hareket ettirmesine olanak
sağlamaktadır. Keşif robotu Wi-Fi IEEE 802.11n standardında kablosuz haberleşme
teknolojisi ile Windows ve Android işletim sistemine sahip olan tablet veya
bilgisayardan kontrol edilebilmektedir. Keşif robotu üzerine konulan analog veya dijital
sensörleri okuyabilmek için Atmega mikro denetleyici ve keşif robotunun ana
kontrolörü olarak üzerinde açık kaynak Linux işletim sistemi kullanılan ARM
mikroişlemci mimarisi tabanlı bir gömülü sistem barındırmaktadır.
Keşif robotları üzerine literatüre baktığımızda, G. Erşahin [7], kablosuz bir gezgin
robotun kontrolünü, MJPEG görüntü formatını kullanarak uzaktan Android işletim
sistemi tabanlı tablet üzerinden gerçekleştirmiştir. Bir başka çalışmada ise O. Çelik ve
diğerlerinin [8] ,kablosuz ağ kullanarak üzerine kamera monte edilmiş paletli bir gezgin
robotun uzaktan kontrolünü sağlamışlardır.
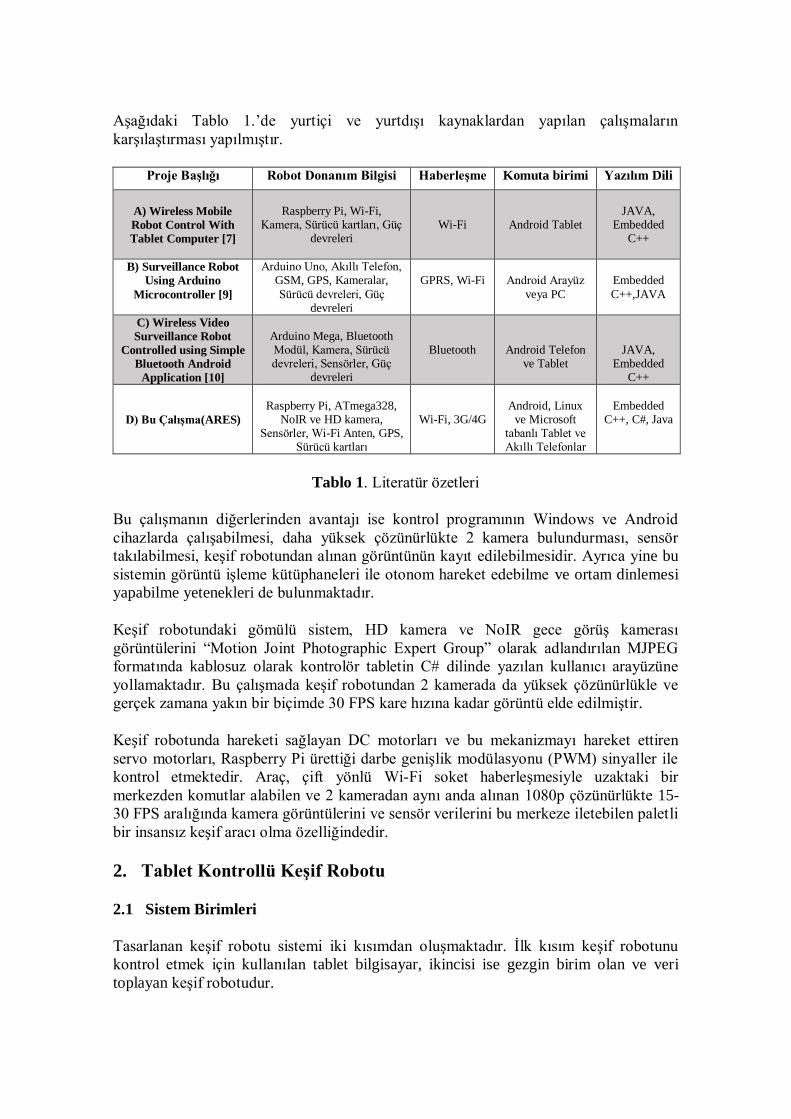
Aşağıdaki Tablo 1.’de yurtiçi ve yurtdışı kaynaklardan yapılan çalışmaların
karşılaştırması yapılmıştır.
Proje Başlığı Robot Donanım Bilgisi Haberleşme Komuta birimi Yazılım Dili
A) Wireless Mobile
Robot Control With
Tablet Computer [7]
Raspberry Pi, Wi-Fi,
Kamera, Sürücü kartları, Güç devreleri
Wi-Fi
Android Tablet
JAVA,
Embedded C++
B) Surveillance Robot
Using Arduino
Microcontroller [9]
Arduino Uno, Akıllı Telefon, GSM, GPS, Kameralar,
Sürücü devreleri, Güç devreleri
GPRS, Wi-Fi
Android Arayüz
veya PC
Embedded
C++,JAVA
C) Wireless Video
Surveillance Robot
Controlled using Simple
Bluetooth Android
Application [10]
Arduino Mega, Bluetooth Modül, Kamera, Sürücü devreleri, Sensörler, Güç
devreleri
Bluetooth
Android Telefon ve Tablet
JAVA, Embedded
C++
D) Bu Çalışma(ARES)
Raspberry Pi, ATmega328,
NoIR ve HD kamera, Sensörler, Wi-Fi Anten, GPS,
Sürücü kartları
Wi-Fi, 3G/4G
Android, Linux
ve Microsoft tabanlı Tablet ve Akıllı Telefonlar
Embedded
C++, C#, Java
Tablo 1. Literatür özetleri
Bu çalışmanın diğerlerinden avantajı ise kontrol programının Windows ve Android
cihazlarda çalışabilmesi, daha yüksek çözünürlükte 2 kamera bulundurması, sensör
takılabilmesi, keşif robotundan alınan görüntünün kayıt edilebilmesidir. Ayrıca yine bu
sistemin görüntü işleme kütüphaneleri ile otonom hareket edebilme ve ortam dinlemesi
yapabilme yetenekleri de bulunmaktadır.
Keşif robotundaki gömülü sistem, HD kamera ve NoIR gece görüş kamerası
görüntülerini “Motion Joint Photographic Expert Group” olarak adlandırılan MJPEG
formatında kablosuz olarak kontrolör tabletin C# dilinde yazılan kullanıcı arayüzüne
yollamaktadır. Bu çalışmada keşif robotundan 2 kamerada da yüksek çözünürlükle ve
gerçek zamana yakın bir biçimde 30 FPS kare hızına kadar görüntü elde edilmiştir.
Keşif robotunda hareketi sağlayan DC motorları ve bu mekanizmayı hareket ettiren
servo motorları, Raspberry Pi ürettiği darbe genişlik modülasyonu (PWM) sinyaller ile
kontrol etmektedir. Araç, çift yönlü Wi-Fi soket haberleşmesiyle uzaktaki bir
merkezden komutlar alabilen ve 2 kameradan aynı anda alınan 1080p çözünürlükte 15-
30 FPS aralığında kamera görüntülerini ve sensör verilerini bu merkeze iletebilen paletli
bir insansız keşif aracı olma özelliğindedir.
2. Tablet Kontrollü Keşif Robotu
2.1 Sistem Birimleri
Tasarlanan keşif robotu sistemi iki kısımdan oluşmaktadır. İlk kısım keşif robotunu
kontrol etmek için kullanılan tablet bilgisayar, ikincisi ise gezgin birim olan ve veri
toplayan keşif robotudur.
2.2 Keşif Robotu
Keşif robotu, sistemin uzaktan kontrol edilebilen ve verileri toplayan hareketli
parçasıdır. Ana sunucu görevi gören keşif robotu, Raspberry Pi mikrobilgisayarını
barındırır. Raspberry Pi kredi kartı büyüklüğünde ARM işlemci bulunduran ve debian
tabanlı Linux işletim sistemi koşulan mini bir bilgisayardır [11]. Raspberry Pi, Atmega
mikro denetleyiciden sensör verileri alır ve kablosuz olarak tablet bilgisayar yollar.
Ayrıca keşif robotunun hareketini sağlayan dc motorları sürmekte, üzerine yerleştirilmiş
kameraların sağ-sol veya yukarı-aşağıya doğru hareketini kontrol etmekte ve bu
kameralardan alınan görüntüleri yine kablosuz olarak tablet bilgisayara aktarmaktadır.
Kısacası tüm veri aktarımını, robotun hareketini ve tablet bilgisayarla olan bağlantıları
kuran birimdir.
Keşif robotu sistemi aşağıdaki elemanlara sahiptir ve blok diyagramı Şekil 1’de
gösterilmektedir.
Batarya ve DC-DC çevirici
Motorlar ve sürücüsü
Optokuplör devreleri
Raspberry Pi mikrobilgisayarı
Kamera Servo Pan-Tilt mekanizması
Kameralar
Sensörler
WiFi ağ adaptörü
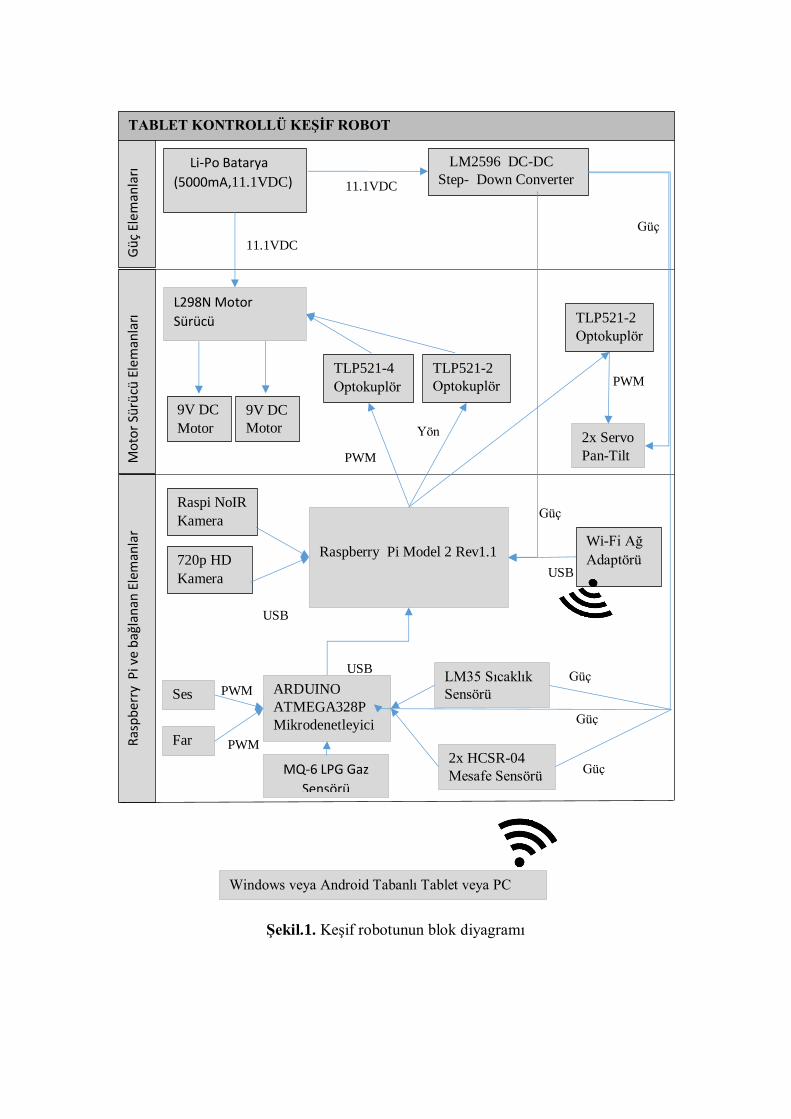
Şekil.1. Keşif robotunun blok diyagramı
TABLET KONTROLLÜ KEŞİF ROBOT
PWM
Windows veya Android Tabanlı Tablet veya PC
Gü
ç El
eman
ları
Li-Po Batarya
(5000mA,11.1VDC)
LM2596 DC-DC
Step- Down Converter
Mo
tor
Sürü
cü E
lem
anla
rı
L298N Motor
Sürücü
TLP521-4
Optokuplör
9V DC
Motor
TLP521-2
Optokuplör
Ras
pb
erry
Pi v
e b
ağla
nan
Ele
man
lar
Raspberry Pi Model 2 Rev1.1
Raspi NoIR
Kamera
720p HD
Kamera
Wi-Fi Ağ
Adaptörü
9V DC
Motor
ARDUINO
ATMEGA328P
Mikrodenetleyici
2x Servo
Pan-Tilt
MQ-6 LPG Gaz
Sensörü
TLP521-2
Optokuplör
11.1VDC
Güç
PWM
Yön
Güç
USB
USB
USB
2x HCSR-04
Mesafe Sensörü
LM35 Sıcaklık
Sensörü
Far
Ses
PWM
11.1VDC
Güç
Güç
Güç
PWM
2.2.1 Batarya ve DC-DC Çevirici
Şekil 1’de görüldüğü gibi keşif robot, Li-Po batarya üzerinden 12 V - 5000 mA güç ile
beslenmektedir. [12] Burada bataryalarda güç tasarrufu sağlamak için şekilde görülen
Raspberry Pi elemanlarının toprak uçları, N-kanallı bir mosfet transistore bağlanarak ve
ayrıca bu mosfetin gate ucuna Raspberry Pi GPIO pinlerinden çekilebilecek bağlantılar
vasıtası ile çalışması istenmeyen elemanların gücü kesilip, açılabilir. Bu sayede belirgin
bir güç tasarrufu sağlanabilir.
2.2.2 Motorlar ve Sürücüsü
Gezgin birim olan keşif robotuna hareketini sağlaması üzere şaşeye entegre edilmiş iki
adet 9V DC motor bulunmaktadır. [13] Bu motorların hareketi için gereken sinyaller,
Raspberry Pi’nin oluşturduğu PWM sinyaller ile önce optoizolatör devresine ardından
L298N motor sürücü devresine ulaşmaktadır. [14] Bu PWM sinyal sayesinde paletli
gezgin robotun hızı ve yönü istenildiği gibi ayarlanmaktadır. Ayrıca keşif robotunda
kameraların bakış açılarını değiştirebilmek için servo motor kontrollü bir pan-tilt
mekanizması kullanılmıştır. Bu sayede kameraların bakış açıları yukarı-aşağı ve sağ-sol
olmak üzere 180 derece değiştirilmektedir. Bu motorların kontrolü de kontrol birimi
olan tablet üzerinden alınan komutlara göre PWM sinyaller ile gerçekleşmektedir.
2.2.3 Raspberry Pi Mikrobilgisayarı
Keşif robot tankın ana kontrolleri olarak içinde gömülü Linux işletim sistemi çalıştıran
ve ARM mimarisine sahip Broadcom BCM2835 SoC (System on Chip) mikroişlemci
bulunduran Raspberrry Pi 2 kullanılmıştır. [15] Keşif robotunda bulunan Wi-Fi Ağ
adaptörü ve kameralar Raspberry Pi’ye bağlanmış olup, bu aygıtlar C++ dilinde
yazdığımız programlarla gerekli görevleri yerine getirirler.
Keşif robotu biriminde yazılan programlar Raspberry Pi ve Atmega mikrodenetleyici
üzerinde yürütülmektedir. Raspberry Pi üzerinde keşif robotunu gerçekleştirebilmek
için programlar yazılmıştır. Bu programlar sayesinde keşif robotunun hareketi
sağlanmış, kamera görüntüleri aktarılmış ve hedef ortamda ortam dinlemesi yapılmıştır.
Ayrıca sensör verilerini ADC birimi ile okumak ve sesli uyarıyı aktifleştirmek üzere
Atmega328 mikrodenetleyicisi içine processing/wiring tabanında program gömülmüştür
[16].
2.2.4 Optokuplör Devreleri
Raspberry Pi ile motor sürücü devresini kontrol edebilmek için direk pin bağlantısı
yerine araya Şekil 1’de görüldüğü gibi optokuplörlü bir devre tasarlanarak motor sürücü
devresi izole edilmiştir. Bunun nedeni ise L298N sürücüsünde meydana gelebilecek bir
arızanın veya kısa devrenin Raspberry Pi’ye zarar vermesine engel olmaktır. Bunun için
2 adet TLP521-4 Optokuplör entegresi kullanılmıştır.
2.2.5 Windows Tabanlı Kontrolör Tablet
Gezgin birimi kontrol eden tablet bilgisayar, gezgin birimden veri alıp işleyen ve
yüksek performanslı donanıma sahiptir. Keşif robotu kontrol arayüzü, Windows ve
Android tabletlerde çalışabilmesi için tasarlanmıştır. Keşif robotunu yönetmek isteyen
kullanıcıya kullanımı oldukça kolay bir arayüz sağlamaktadırlar. Arayüz üzerinde iki
farklı kameradan alınan görüntüler, sensör verileri, hız, yön ve pan-tilt kontrol formları
bulunmaktadır. Ayrıca görüntü işleme, ekran görüntüsü alma, video kayıt, batarya ve
uzaklık sensörlerinden alınabilen transparant barlar bulunmaktadır.
Kullanıcı keşif robotunu hız kontrolü yaparak dilediği yöne hareket ettirebilmektedir.
Bunun için yön butonları arayüz uygulamasına yerleştirilmiştir. Aynı şekilde
kullanıcının video kayıt veya ekran görüntüsü alabilmesi içinde ilgili formlar
bulunmaktadır. Ayrıca kullanıcı kamera bakış açılarını ilgili butonları kullanarak
değiştirebilmektedir. Bu sayede sağa-sola ve yukarı-aşağıya doğru 180 derecelik bir
bakış açısı sağlanmıştır.
Keşif robotundan alınan görüntüler AFORGE ve OpenCV kütüphaneleri ile hem
Windows hem de Android üzerinde görüntülenebilmesi ve işlenebilmesi
sağlanmıştır[17][18]. Bu kütüphaneler kullanılarak keşif robotuna çeşitli görüntü işleme
işlemleri ve hareketli nesne takibi yaptırılabilmiştir.
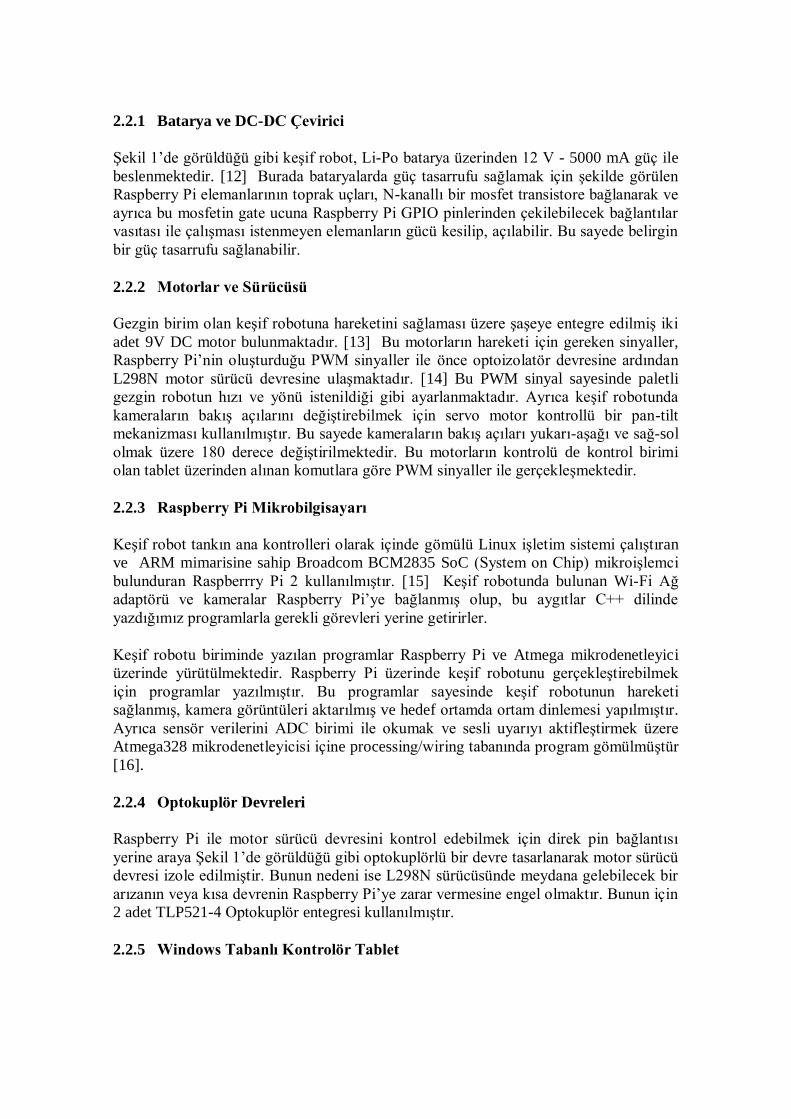
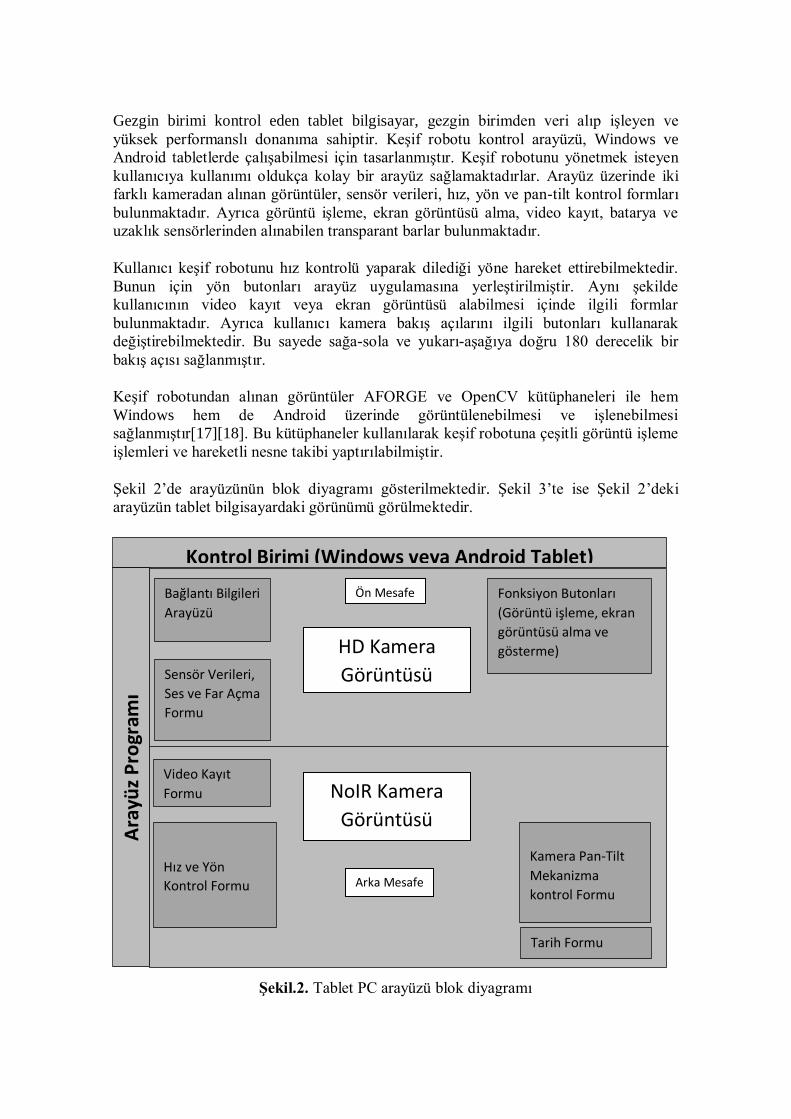
Şekil 2’de arayüzünün blok diyagramı gösterilmektedir. Şekil 3’te ise Şekil 2’deki
arayüzün tablet bilgisayardaki görünümü görülmektedir.
Şekil.2. Tablet PC arayüzü blok diyagramı
Kontrol Birimi (Windows veya Android Tablet)
Fonksiyon Butonları
(Görüntü işleme, ekran
görüntüsü alma ve
gösterme)
Sensör Verileri,
Ses ve Far Açma
Formu
Bağlantı Bilgileri
Arayüzü
Ara
yüz
Pro
gram
ı
HD Kamera
Görüntüsü
Arka Mesafe
Tarih Formu
Ön Mesafe
NoIR Kamera
Görüntüsü
Video Kayıt
Formu
Kamera Pan-Tilt
Mekanizma
kontrol Formu
Hız ve Yön
Kontrol Formu
Şekil.3. Tablet PC HD kamera arayüzü.
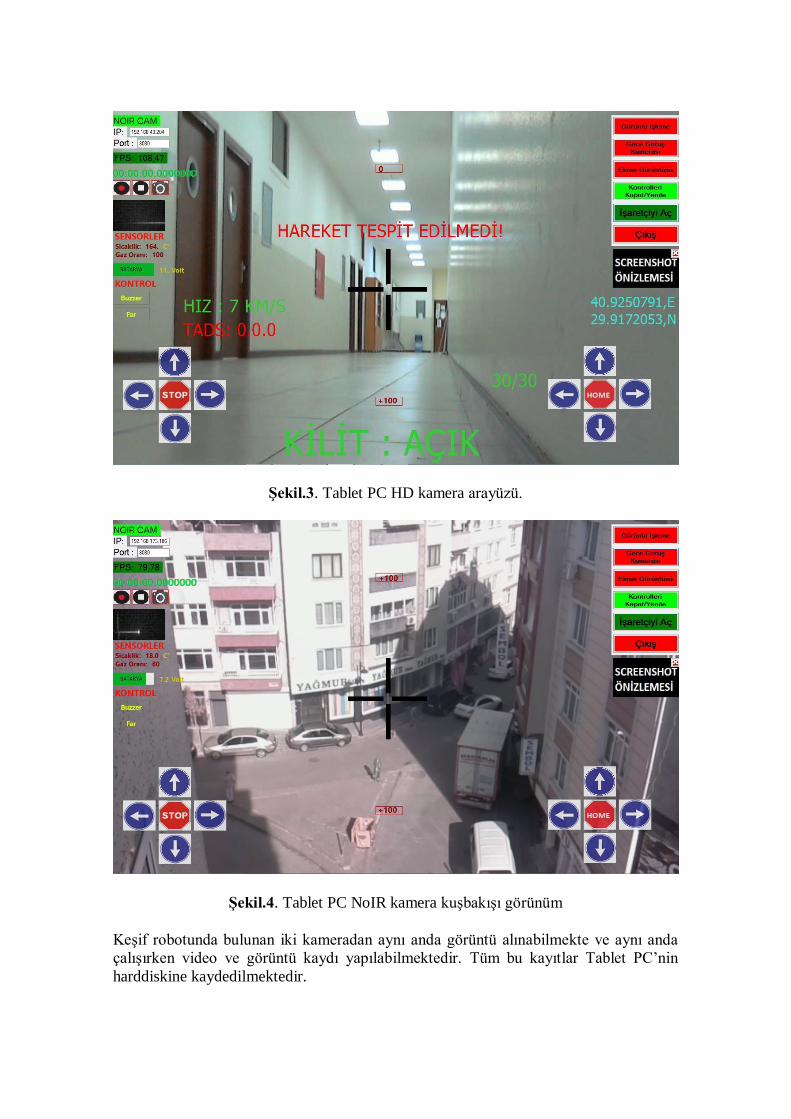
Şekil.4. Tablet PC NoIR kamera kuşbakışı görünüm
Keşif robotunda bulunan iki kameradan aynı anda görüntü alınabilmekte ve aynı anda
çalışırken video ve görüntü kaydı yapılabilmektedir. Tüm bu kayıtlar Tablet PC’nin
harddiskine kaydedilmektedir.
2.2.6 Sensörler
Keşif robotumuza deneme amaçlı olarak LM35 sıcaklık sensörü, MQ-6 gaz sensörü ve
mesafe bulmak için ultrasonik sensörler takılmıştır. Ultrasonik sensörler, keşif
robotunun önünde ve arkasında bulunmak üzere iki tanedir. Bu ultrasonik sensörler
aracın önünde veya arkasında bulunan herhangi bir nesnenin uzaklığını kontrol
bilgisayarına aktarılmaktadır. Bu sensörlerin verilerini Arduino okur ve UART
üzerinden keşif bilgisayarının ana bilgisayarı olan Raspberry Pi’ye gönderir. Raspberry
Pi ise alınan bu verileri işleyerek kontrol bilgisayarının arayüzünde ilgili bar
göstergelere kablosuz olarak aktarır.
2.2.7 Kameralar
Gezgin birim olan keşif robotunda 2 adet HD kamera bulunmaktadır. Bunlar, Logitech
1080p 5MP kamera ve 1080P Raspberry Pi NoIR gece görüş kamerasıdır[19].
Kameralar servo motor ile kontrol edilen pan-tilt mekanizmasına bağlıdır. Bu sayede
bakış açıları değiştirilebilmektedir. Logitech HD kamera ve NoIR kamera herhangi
ekstradan güç kaynağına ihtiyaç olmadan Raspberry Pi üzerinde çalışabilmektedir. Bu
kameraların güç kaynağı Raspberry Pi üzerinden alınırsa, HD kamera 1080p piksel
çözünürlükte 15-30 FPS arasında, NoIR kamera ise aynı çözünürlükte 15 FPS kare
hızında veri gönderebilmektedir. Eğer kameralar gücünü bataryaya bağlı bir USB
çoklayıcıdan alırsa daha yüksek bir çözünürlükte daha yüksek bir kare hızı ile
çalışabilir. Örneğin NoIR kamera 1080p 30 FPS HD yayın yapabilir.
Ortam sesinin alınabilmesi için yine Logitech HD kameranın içinde bulunan mikrofon
kullanılmıştır. Bu sayede örneklenen ses dataları, komuta birimi olan tablete UDP
üzerinden yollanmış ve ortam dinlemesi yapılabilmiştir.
2.2.8 Wi-Fi Ağ Adaptörleri
Wi-Fi ağ adaptörleri kablosuz iletişim kurabilmek için hem tablet hem de keşif robotu
üzerinde olmak üzere 2 tane kullanılmıştır. Bu Wi-Fi ağ adaptörleri, IEEE 802.11n
standardında çalışır ve bantgenişliği 20 ila 40 MHz, anten gücü 5 dB ve aktarım hızı
150Mbps’dir. Bu ağ adaptörleri AP (Access Point) modunu desteklerler ve bu sayede
kendi ağlarını kurabilirler. Bu çalışmada gerekli AP, keşif robotu üzerinde kurulmuştur.
Raspberry Pi 2’de USB portları maksimum 300 mA akım verebilmektedir. Daha fazla
akım çekebilmek için Linux kernelinden komut değişikliği yapılmış ve USB
portlarından maksimum 1 A çekebilmek üzere ayar yapılmıştır. Bu sayede Wi-Fi hızı ve
menzili daha da arttırılmıştır.[20]
Şekil 1’deki blok diyagramına göre tasarlanan keşif robotu, Şekil 3’te görüldüğü gibi
pin bağlantıları yapılıp gerçeklenmiştir. Raspberry Pi’nin 40 adet GPIO (General
Purpose Input /Output) pinleri mevcuttur. Bu pinlerden ikisi PWM çıkış, dördü ise DC
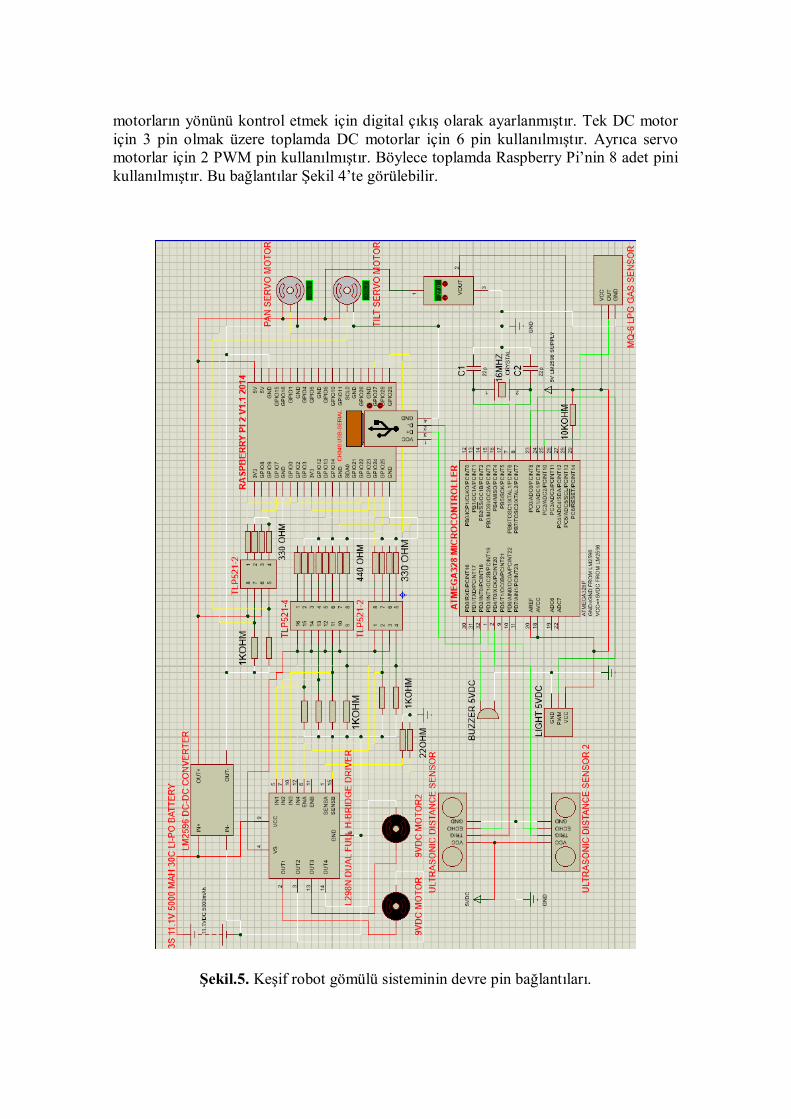
motorların yönünü kontrol etmek için digital çıkış olarak ayarlanmıştır. Tek DC motor
için 3 pin olmak üzere toplamda DC motorlar için 6 pin kullanılmıştır. Ayrıca servo
motorlar için 2 PWM pin kullanılmıştır. Böylece toplamda Raspberry Pi’nin 8 adet pini
kullanılmıştır. Bu bağlantılar Şekil 4’te görülebilir.
Şekil.5. Keşif robot gömülü sisteminin devre pin bağlantıları.
3. Sistemin Çalışması
Keşif robotun üzerindeki Raspberry Pi’ya güç verildiği anda Linux işletim sistemi
önyükleme yapar ve WiFi haberleşme için bir hotspot ağ oluşturur. Yükleme devam
ederken kamera görüntülerini alır ve ilgili portlardan UDP bağlantı ile transfer eder.
Önyükleme bittikten sonra ise C++ dilinde yazılan programlar (motorları kontrol eden,
sensorlerden veri alan, bağlantıyı kontrol eden vb.) devreye girmeye başlar.
Tablet PC hotspot ağa bağlandığı andan itibaren arayüz programında gerekli keşif
robottan transfer edilen sensör ve kamera görüntü verileri arayüz ekranında gösterilir.
Keşif robotu başlangıçta hareketsizdir. Tablet PC üzerinden gelen komutlar, keşif
robotunun üzerindeki Raspberry Pi’ye kablosuz ağ üzerinden transfer edilir ve bu
komutlara göre Raspberry Pi, motor sürücü devresine PWM sinyal gönderir ve böylece
motorlar hareket eder. Keşif robotuyla bağlantı kuran tablet bilgisayar, gelen verileri
işledikten sonra arayüzünde sensör verilerini ve kamera görüntülerini kullanıcıya
gösterir. Kullanıcı da bu verilere göre yine tablet bilgisayarın arayüzü aracılığıyla keşif
robotunu kontrol eder.
Tablet PC, Raspberry Pi’ye bağlı kameralardan alınan görüntüyü arayüz programında
gösterir. İki farklı kamera için iki farklı kamera görüntüsü aynı anda izlenebilir ve
kaydedilebilir. Ayrıca istenirse AForge.Net ve OpenCV görüntü işleme kütüphaneleri
sayesinde nesne takibi veya hareket tespiti yaptırtılabilir.
Ayrıca tablet PC üzerinde keşif robotunun hız kontrolü yapılabilir ve servo pan-tilt
mekanizması çalıştırılabilir. Bununla birlikte video kaydı istenirse hem görüntü işlemeli
hem de görüntü işlemesiz olarak yapılabilmektedir. Tablet PC, keşif robotunun
gönderdiği sensor verilerini ekranında gösterir. Bu sayede kullanıcı tankın bulunduğu
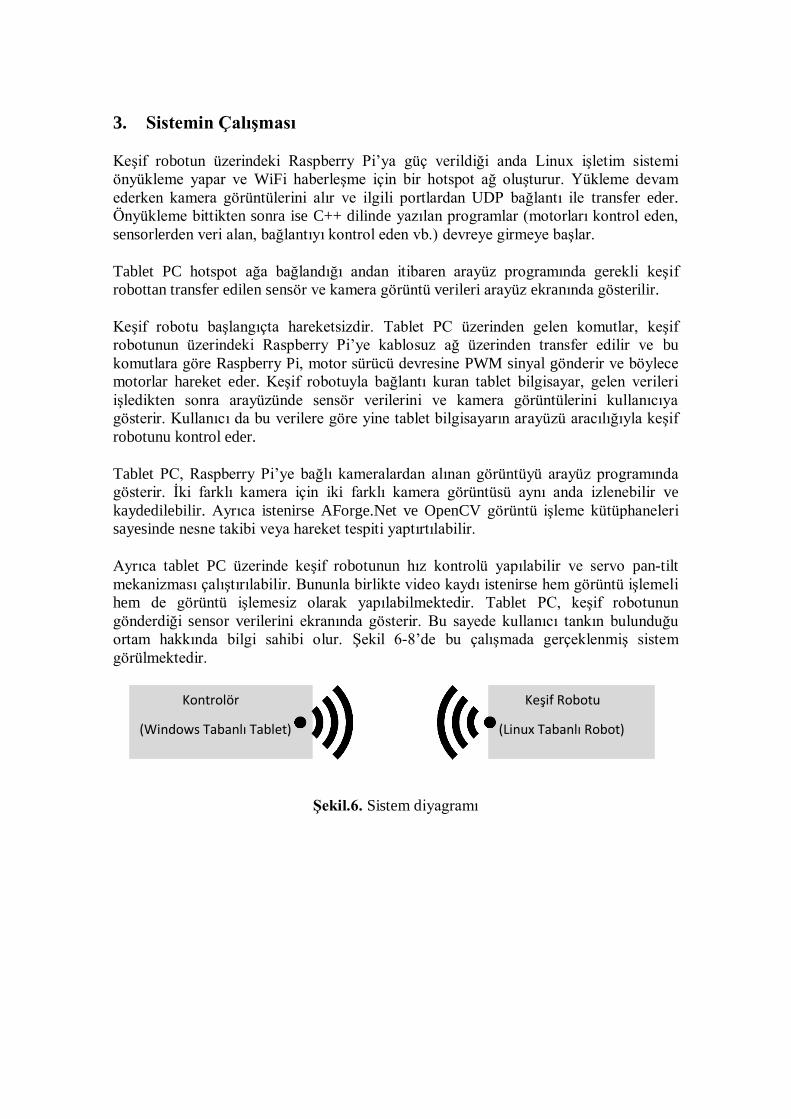
ortam hakkında bilgi sahibi olur. Şekil 6-8’de bu çalışmada gerçeklenmiş sistem
görülmektedir.
Şekil.6. Sistem diyagramı
Kontrolör
(Windows Tabanlı Tablet)
Keşif Robotu
(Linux Tabanlı Robot)
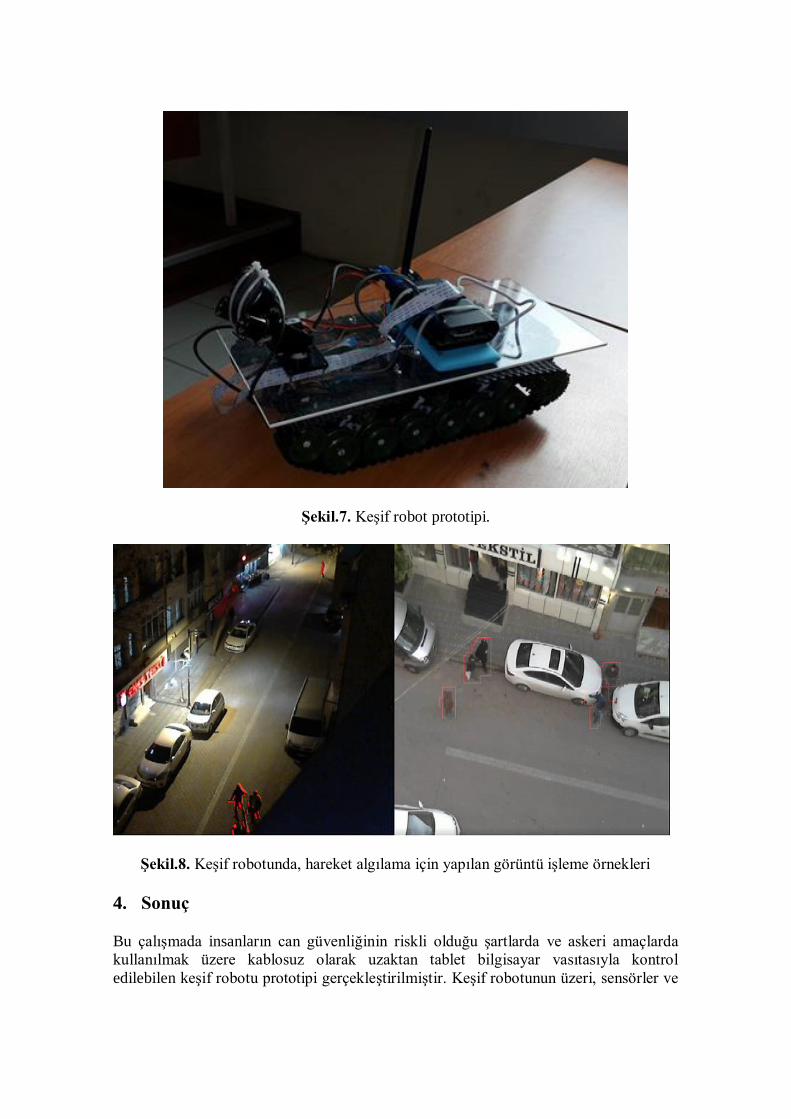
Şekil.7. Keşif robot prototipi.
Şekil.8. Keşif robotunda, hareket algılama için yapılan görüntü işleme örnekleri
4. Sonuç
Bu çalışmada insanların can güvenliğinin riskli olduğu şartlarda ve askeri amaçlarda
kullanılmak üzere kablosuz olarak uzaktan tablet bilgisayar vasıtasıyla kontrol
edilebilen keşif robotu prototipi gerçekleştirilmiştir. Keşif robotunun üzeri, sensörler ve

farklı özellikte iki kamera ile donatılmış ve kablosuz haberleşme teknolojisi ile
Windows veya Android işletim sistemine sahip olan tablet veya bilgisayardan kontrol
edilebilmektedir. Bu tasarım kapsamında gerçekleştirilen keşif robotunun temel
özellikleri; C++ ve C# tabanlı olması, HD kalitede gece-gündüz video ve fotoğraf
çekebilmesi, üzerindeki sensörler ile hedef ortamı analiz etmesi, ortam dinlemesi
yapabilmesi, geliştirilebilir olması, görüntü işleyebilmesi ve gerçek zamanlı
çalışabilmesidir.
Bu çalışmada kullanılan keşif robotunun gerçek zamanlı görüntü aktarımı yapabildiği
ve açık alanda 100 metrenin üzerinde istikrarlı çalıştığı gözlenmiştir. Bu sayede keşif
robotu üzerindeki gömülü sisteme, karekod görüntü işleme algoritmalarının entegre
edilmesi ile keşif robotunun otonom hareket yeteneği görüldüğü gözlenmiştir. Bu
çalışma robotun üzerinde robot kol ekleyerek ve geliştirerek otomasyonda veya askeri
alanda kullanılabilecek bir keşif robotu üretilmesi amaçlanmaktadır.
5. Kaynakça
[1] Musaloiu R. vd., “Life under Your Feet: A Wireless Sensor Network for Soil
Ecology,” Proc. 3rd EmNets Wksp., Mayıs 2006.
[2] Fu, S., Yang, G. ve Hou, Z., “An Indoor Navigation System for Autonomous Mobile
Robot using Wireless Sensor Network”, IEEE International Conference on Networking,
Sensing and Control, Okayama, Japonya, 2009.
[3] Sichitiu M. ve Ramadurai, V., “Localization of Wireless Sensor Networks with a
Mobile Beacon”, IEEE International Conference on Mobile Ad-hoc and Sensor
Systems, Fort Lauderdale, USA, 2004.
[4] Yao, Z. and Gupta, K., “Distributed Roadmaps for Robot Navigation in Sensor
Networks”, IEEE International Conference on Robotics and Automation, Alaska, USA.,
2010.
[5] Gang Zhao, “Wireless Sensor Networks for Industrial Process Monitoring and
Control: A Survey”, Network Protocols and Algorithms, Vol. 3, No. 1. 2011.
[6] Popa, M., Marcu, M. ve Popa, A., “Wireless sensory control for mobile robot
navigation”, 7th International Symposium on Intelligent Systems and Informatics,
Tokyo, Japan, 2009.
[7] Erşahin, G. ve Sedef, H., “Wireless Mobile Robot Control With Tablet Computer”,
Procedia - Social and Behavioral Sciences, No. 195, pp. 2874 – 2882, 2015.
[8] “Kablosuz Ağ Tabanlı Gezgin Keşif Robotu: Kaşif ”
http://www.emo.org.tr/ekler/0d733881f6cd25c_ek.pdf
[9] Kulkarni, Chinmay, et al. "Surveillance Robot Using Arduino Microcontroller,
Android APIs and the Internet." Proceedings of the 2014 First International Conference
on Systems Informatics, Modelling and Simulation. IEEE Computer Society, 2014.
[10] Shaikh, Shoeb Maroof, et al. "Wireless Video Surveillance Robot Controlled using
Simple Bluetooth Android Application." International Journal of Advanced Research in
Computer Science 6.2 (2015).
[11] “Raspbian işletim sistemi” , http://www.raspbian.org/RaspbianAbout
[12] “Li-Po Bataryalar” http://www.multicopterturkiye.com/lipo-batarya-nedir/
[13] Bomec Robot Teknolojileri, “12V 200Rpm Redüktörlü DC Motor,”
http://www.robotistan.com/12V-200Rpm- ReduktorluDC-Motor,PR-27.html, Bomec
Robot Teknolojileri 2011.
[14] Gökçegöz F., “L-298 H-Köprü Entegresi,” MCU-Turkey, http://www.mcu-
turkey.com/?p=16323, 2011.
[15] “Raspberry Pi” , http://www.raspi.gen.tr/2012/08/01/raspberry-pi-nedir/
[16] “Arduino Hakkında” , http://www.arduino.cc/en/Guide/Introduction
[17] “AFORGE.net görüntü işleme kütüphanesi”, http://www.aforgenet.com/
[18] “OpenCV görüntü işleme kütüphanesi”, http://opencv.org/
[19] “No-IR Raspi Cam” , http://www.raspberrypi.org/products/pi-noir-camera/
[20] ”Raspberry Pi USB akımını arttırma”, https://www.hackster.io/idreams/boost-usb-
current-in-raspberry-pi-a1531d

![Hping ile Ağ Keşif Çalışmaları - exploit-db.comturkish]-network... · Hping ile Ağ Keşif Çalışmaları [Hping-Huzeyfe ÖNAL [Hping serisinin](https://img.pdfslide.tips/doc/110x75/5e0e5bc97f712250bf04bfed/hping-ile-a-keif-almalar-exploit-dbcom-turkish-network-hping.jpg)