Embed Size (px)
Citation preview

®
Handling and more
Automat i on Componen tsfor the Semiconductor Industry
2009/2010

About Us
Genera
l
2
The product offerings contained in this catalog area subset of robotic products offered by the isel group.
Our products are specifically designed and engineeredto address the unique needs and requirements of thesemiconductor, flat panel display, nano-technology,and related industries.
Should you have a special application or productrequirement not fully addressed by the offerings in thiscatalog, please contact us we will be delighted to workwith you to find a solution that meets your needs.
Our company's Mission:
isel Germany AG
isel Germany AG
isel Germany AG
isel Germany AG
was founded in 1972 and is the corecompany of the global isel Group.
The company develops, manufactures, markets, sells and ser-vices systems and components used for automation, automa-tion control systems, robots and related handling systems.
The company supports the global market needs of the Semi-conductor Equipment and related industries, its activities arecentered on the company's expertise in automation andinterrelated technologies and include a broad array ofcustomer applications using the isel product line as thefoundation to address those needs.
is located in Eichenzell (Hesse) andDermbach (Thuringia), Germany.
The mission of is to design, engineer andmanufacture, sell and service products that provide ourcustomers with reliable, high quality technical solutions,at a favorable price-performance ratio.
The foundation of all isel components and systems is focusedadherence to “design for modularity”, benefiting the customerin design flexibility, cost, and functional upgradability. Thismethodology assures seamless integration of mechanical,electronic and software functions from initial design, onthroughout all aspects of the total product life cycle.
isel's open interfaces for software and control systems providethe flexibility that is required to meet the integration needs anddemands of a customers existing applications and ensurescompatibility with implementations provided by othersuppliers.
maintains a permanent demonstration andapplication facility at its Eichenzell facility in central Germanyand at a facility in Fremont, California. Ask for an appointmentwith one of our applications engineers.
We look forward to your visit and an opportunity to serve yourautomation, robotic and handling needs.
Handling and more
Eichenzell facility
Dermbach facility

Genera
l
Best Service
3 Service
Handling and more
3
We're there for you...
...because you'll get it all from one sourceBecause we control all aspects of our products life cycle, from design, production, sales and service, we ensure you will receivecompetent contacts for all questions concerning our products.
We're there for you...
We're there for you...
...with more than 30 years of market presenceiselRobotikSupporting department is the renowned and internationally-active .
Benefit from our market presence of many years in a variety of industry lines.isel Germany AG
...in the heart of EuropeFrom our location in Eichenzell (Hessen), in central Germany there is a maximum distace of 400 km to Europe'ssemiconductor key locations.
Desig
nProduction
Sales
Handling and more

isel IWH F-1 Wafer Handling Robotswith two-link arm
Wafe
r H
andling
4
Characteristics
■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Maximum reliability and precision
Top mounted (TA) or bottom mounted (BA) versionsavailable
Customized designs
Optional internal or external controller
Absolute (digital) or incremental encoder
Seamless integration with prealigner, linear track and otherperiphal components
Optional high-end controller for controlling complexsystems
Including Robot Control Center (RCC)
Class 1 clean-room environment compatible
Made in Germany
Handling and more
Specifications
Repeatability
Working range
Payload
T
R
Z
Z
radial
theta
Maximum speed
Main interface
Power supply
T
R
Z
360°/s
1,000 mm/s
450 mm/s
110 / 230 V AC
±0.02°
±0.03 mm
±0.03 mm
10”, 13”, 17”
10", 14"
450°
0.75 kg
RS-232 [DB9]Option:Ethernet [RJ-45]
Peripheral interface RS-485 [RJ-45],RJ-11
Figure:IWH TA10S10 F-1

isel IWH F-1 Wafer Handling Robotswith two-link arm
Wafe
r H
andling
5
Handling and more
Dimensions
IWH TA S F-1__ __
IWH TA S F-110 10IWH TA S F-113 10IWH TA S F-117 10
IWH TA S F-110 14IWH TA S F-113 14IWH TA S F-117 14
Possible Configurations
IWH BA S F-1__ __
IWH BA S F-110 10IWH BA S F-113 10IWH BA S F-117 10
IWH BA S F-110 14IWH BA S F-113 14IWH BA S F-117 14
Possible Configurations
92
57 65
77
57 65
513.
5(T
A)
10
588.
5(T
A)
13
690
(TA
)17
431.
8(T
A)
17
330.
2(T
A)
13
254
(TA
)10
365.8 (S )14
266.7 (S )10
365.8 (S )14
266.7 (S )10
620.
8(T
A)
10
695.
8(T
A)
13
797.
3(T
A)
17
254
(TA
)10
330.
2(T
A)
13 431.
8(T
A)
17

isel IWH F-1 Wafer Handling Robotswith two-link heavy duty arm
Wafe
r H
andling
6
Characteristics
■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Maximum reliability and precision
Top mounted (TA) or bottom mounted (BA) versionsavailable
Customized designs
Optional internal or external controller
Absolute (digital) or incremental encoder
Seamless integration with prealigner, linear track and otherperiphal components
Optional high-end controller for controlling complexsystems
Including Robot Control Center (RCC)
Class 1 clean-room environment compatible
Made in Germany
Handling and more
Specifications
Repeatability
Working range
Payload
T
R
Z
Z
radial
theta
Maximum speed
Main interface
Power supply
T
R
Z
360°/s
1,000 mm/s
450 mm/s
110 / 230 V AC
±0.02°
±0.03 mm
±0.03 mm
10”, 13”, 17”
10", 12", 14", 16", 20"
450°
2.75 kg
RS-232 [DB9]Option:Ethernet [RJ-45]
Peripheral interface RS-485 [RJ-45],RJ-11
Figure:IWH TA10S10HD F-1

isel IWH F-1 Wafer Handling Robotswith two-link heavy duty arm
Wafe
r H
andling
7
Handling and more
Dimensions
IWH TA S F-1__ __ HD
IWH TA S HD F-110 10IWH TA S HD F-110 12IWH TA S HD F-110 14IWH TA S HD F-110 16IWH TA S HD F-110 20IWH TA S HD F-113 10IWH TA S HD F-113 12IWH TA S HD F-113 14
IWH TA S HD F-113 16IWH TA S HD F-113 20IWH TA S HD F-117 10IWH TA S HD F-117 12IWH TA S HD F-117 14IWH TA S HD F-117 16IWH TA S HD F-117 20
Possible Configurations
IWH BA S F-1__ __ HD
IWH BA S HD F-110 10IWH BA S HD F-110 12IWH BA S HD F-110 14IWH BA S HD F-110 16IWH BA S HD F-110 20IWH BA S HD F-113 10IWH BA S HD F-113 12IWH BA S HD F-113 14
IWH BA S HD F-113 16IWH BA S HD F-113 20IWH BA S HD F-117 10IWH BA S HD F-117 12IWH BA S HD F-117 14IWH BA S HD F-117 16IWH BA S HD F-117 20
Possible Configurations
513.
5(T
A)
10
588.
5(T
A)
13
690
(TA
)17
431.
8(T
A)
17
329.
9(T
A)
13
254
(TA
)10
266.7 (S )10
304.8 (S )12
365.8 (S )14
426.7 (S )16
508 (S )20
266.7 (S )10
304.8 (S )12
365.8 (S )14
426.7 (S )16
508 (S )20
633.
5(T
A)
10
708.
5(T
A)
13
810
(TA
)17
254
(TA
)10
330.
2(T
A)
13 431.
5(T
A)
17
105
Ø 235
Ø 277
Ø 330
75
90
Ø 235
185
225
175195
75

isel IWH F-1 Wafer Handling Robotswith three-link heavy duty arm
Wafe
r H
andling
8
Characteristics
■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Maximum reliability and precision
Top mounted (TA) or bottom mounted (BA) versionsavailable
Customized designs
Optional internal or external controller
Absolute (digital) or incremental encoder
Seamless integration with prealigner, linear track and otherperiphal components
Optional high-end controller for controlling complexsystems
Including Robot Control Center (RCC)
Class 1 clean-room environment compatible
Made in Germany
Handling and more
Specifications
Repeatability
Working range
Payload
T
R
Z
Z
radial
theta
Maximum speed
Main interface
Power supply
T
R
Z
360°/s
1,000 mm/s
450 mm/s
110 / 230 V AC
±0.02°
±0.03 mm
±0.03 mm
10”, 13”, 17”
16", 21", 24"
450°
2.75 kg
RS-232 [DB9]Option:Ethernet [RJ-45]
Peripheral interface RS-485 [RJ-45],RJ-11
Figure:IWH TA10S16 F-1

isel IWH F-1 Wafer Handling Robotswith three-link heavy duty arm
Wafe
r H
andling
9
Handling and more
Dimensions
IWH TA S F-1__ __
IWH TA S F-110 16IWH TA S F-110 21IWH TA S F-110 24IWH TA S F-113 16IWH TA S F-113 21
IWH TA S F-113 24IWH TA S F-117 16IWH TA S F-117 21IWH TA S F-117 24
Possible Configurations
IWH BA S F-2__ __
IWH BA S F-110 16IWH BA S F-110 21IWH BA S F-110 24IWH BA S F-113 16IWH BA S F-113 21
IWH BA S F-113 24IWH BA S F-117 16IWH BA S F-117 21IWH BA S F-117 24
Possible Configurations
75
185
225
175195
406.4 (S )16
533.4 (S )21
609.6 (S )24
406.4 (S )16
533.4 (S )21
609.6 (S )24
Ø 235
Ø 277
142
Ø 330
690
(TA
)17 58
8.5
(TA
)13
513.
5(T
A)
10
431.
8(T
A)
17
329.
9(T
A)
13
254
(TA
)10
127
670.
5(T
A)
10
745.
5(T
A)
13
847
(TA
)17
254
(TA
)10
330.
2(T
A)
13
431.
8(T
A)
17

isel IWH F-2 Wafer Handling Robotswith two-link arm and heavy duty body
Wafe
r H
andling
10
Characteristics
■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Maximum reliability and precision
Top mounted (TA) or bottom mounted (BA) versionsavailable
Customized designs
Optional internal or external controller
Absolute (digital) or incremental encoder
Seamless integration with prealigner, linear track and otherperiphal components
Optional high-end controller for controlling complexsystems
Including Robot Control Center (RCC)
Class 1 clean-room environment compatible
Made in Germany
Handling and more
Specifications
Repeatability
Working range
Payload
T
R
Z
Z
radial
theta
Maximum speed
Main interface
Power supply
T
R
Z
360°/s
1,000 mm/s
450 mm/s
110 / 230 V AC
±0.02°
±0.03 mm
±0.03 mm
13”, 17”, 21”
10", 14"
450°
0.75 kg
RS-232 [DB9]Option:Ethernet [RJ-45]
Peripheral interface RS-485 [RJ-45],RJ-11
Figure:IWH TA13S10 F-2

isel IWH F-2 Wafer Handling Robotswith two-link arm and heavy duty body
Wafe
r H
andling
11
Handling and more
Dimensions
IWH TA S F-2__ __
IWH TA S F-213 10IWH TA S F-217 10IWH TA S F-221 10
IWH TA S F-213 14IWH TA S F-217 14IWH TA S F-221 14
Possible Configurations
IWH BA S F-2__ __
IWH BA S F-213 10IWH BA S F-217 10IWH BA S F-221 10
IWH BA S F-213 14IWH BA S F-217 14IWH BA S F-221 14
Possible Configurations
87
Ø 330.2
57 65
72
273255
57225
265
215235
65
557
(TA
)13
659
(TA
)17
760
(TA
)21
330.
2(T
A)
13431.
8(T
A)
17
523.
4(T
A)
21
365.8 (S )14
266.7 (S )10365.8 (S )14
266.7 (S )10
659.
3(T
A)
13
761.
3(T
A)
17
862.
3(T
A)
21
330.
2(T
A)
13 431.
8(T
A)
17
523.
4(T
A)
21

isel IWH HD F-2 Wafer Handling Robotswith two-link heavy duty body/arm
Wafe
r H
andling Characteristics
■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Maximum reliability and precision
Top mounted (TA) or bottom mounted (BA) versionsavailable
Customized designs
Optional internal or external controller
Absolute (digital) or incremental encoder
Seamless integration with prealigner, linear track and otherperiphal components
Optional high-end controller for controlling complexsystems
Including Robot Control Center (RCC)
Class 1 clean-room environment compatible
Made in Germany
Handling and more
Specifications
Repeatability
Working range
Payload
T
R
Z
Z
radial
theta
Maximum speed
Main interface
Power supply
T
R
Z
360°/s
1,000 mm/s
450 mm/s
110 / 230 V AC
±0.02°
±0.03 mm
±0.03 mm
13”, 17”, 21”
10", 12", 14", 16", 20"
450°
2.75 kg
RS-232 [DB9]Option:Ethernet [RJ-45]
Peripheral interface RS-485 [RJ-45],RJ-11
Figure:IWH TA13S10HD F-2
12

isel IWH HD F-2 Wafer Handling Robotswith two-link heavy duty body/arm
Wafe
r H
andling
Handling and more
Dimensions
IWH TA S HD F-2__ __
557
(TA
)13
659
(TA
)17
100
Ø 330.2
760
(TA
)21
253
533.
1(T
A)
21
431.
8(T
A)
17
330.
2(T
A)
13
266.7 (S )10
365.8 (S )14426.7 (S )16
508 (S )20
75
304.8 (S )12
672
(BA
)13
85
774
(BA
)17
533.
4(B
A)
21
330.
2(B
A)
13
255
273
875
(BA
)21
431.
8(B
A)
17
225
265
215235
266.7 (S )10304.8 (S )12
365.8 (S )14426.7 (S )16
508 (S )20
75
IWH TA S HD F-213 10IWH TA S HD F-213 12IWH TA S HD F-213 14IWH TA S HD F-213 16IWH TA S HD F-213 20IWH TA S HD F-217 10IWH TA S HD F-217 12IWH TA S HD F-217 14
IWH TA S HD F-217 16IWH TA S HD F-217 20IWH TA S HD F-221 10IWH TA S HD F-221 12IWH TA S HD F-221 14IWH TA S HD F-221 16IWH TA S HD F-221 20
Possible Configurations
IWH BA S HD F-213 10IWH BA S HD F-213 12IWH BA S HD F-213 14IWH BA S HD F-213 16IWH BA S HD F-213 20IWH BA S HD F-217 10IWH BA S HD F-217 12IWH BA S HD F-217 14
IWH BA S HD F-217 16IWH BA S HD F-217 20IWH BA S HD F-221 10IWH BA S HD F-221 12IWH BA S HD F-221 14IWH BA S HD F-221 16IWH BA S HD F-221 20
Possible Configurations
IWH BA S HD F-2__ __
13

isel IWH F-2 Wafer Handling Robotswith three-link heavy duty body/arm
Wafe
r H
andling Characteristics
■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Maximum reliability and precision
Top mounted (TA) or bottom mounted (BA) versionsavailable
Customized designs
Optional internal or external controller
Absolute (digital) or incremental encoder
Seamless integration with prealigner, linear track and otherperiphal components
Optional high-end controller for controlling complexsystems
Including Robot Control Center (RCC)
Class 1 clean-room environment compatible
Made in Germany
Handling and more
Specifications
Repeatability
Working range
Payload
T
R
Z
Z
radial
theta
Maximum speed
Main interface
Power supply
T
R
Z
360°/s
1,000 mm/s
450 mm/s
110 / 230 V AC
±0.02°
±0.03 mm
±0.03 mm
13”, 17”, 21”
16", 21", 24"
450°
2.75 kg
RS-232 [DB9]Option:Ethernet [RJ-45]
Peripheral interface RS-485 [RJ-45],RJ-11
Figure:IWH TA13S16 F-2
14

isel IWH F-2 Wafer Handling Robotswith three-link heavy duty body/arm
Wafe
r H
andling
Handling and more
Dimensions
IWH TA S F-2__ __
IWH TA S F-213 16IWH TA S F-213 21IWH TA S F-213 24IWH TA S F-217 16IWH TA S F-217 21
IWH TA S F-217 24IWH TA S F-221 16IWH TA S F-221 21IWH TA S F-221 24
Possible Configurations
IWH BA S F-2__ __
IWH BA S F-213 16IWH BA S F-213 21IWH BA S F-213 24IWH BA S F-217 16IWH BA S F-217 21
IWH BA S F-217 24IWH BA S F-221 16IWH BA S F-221 21IWH BA S F-221 24
Possible Configurations
659
(TA
)17 557
(TA
)13
Ø 330.2
137
533,
4(T
A)
21
431,
5(T
A)
17
330,
2(T
A)
13
760
(TA
)21
406.4 (S )16
533.4 (S )21
609.6 (S )24
75
709
(BA
)13
811
(BA
)17
122
431,
8(B
A)
17
330,
2(B
A)
13
533,
4(B
A)
2191
2(B
A)
21273255
225
265
215235
75
406.4 (S )16
533.4 (S )21
609.6 (S )24
15

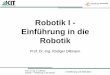
isel IWH F-3 Wafer Handling Robot with dual arm
Wafe
r H
andling
16
Handling and more
Specifications
Repeatability
Working range
Payload
T
R
Z
Z
radial
theta
Maximum speed
Main interface
Power supply
T
R
Z
360°/s
1,100 mm/s
425 mm/s
110 / 230 V AC
±0.02°
±0.03 mm
±0.03 mm
13” (330.2 mm)
14.4" (365.8 mm)
450°
max. 1.25 kg /arm
RS-232 [DB9]Option:Ethernet [RJ-45]
Peripheral interface RS-485 [RJ-45],RJ-11
Characteristics
■
■
■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Wafer handling of up to 300mm
Maximum reliability and precision
Easy connection of a linear track to the robotcontroller
Real time motion control
Very smooth running
Brushless, maintenance free servo motors withlow inertia
Backlash free Harmonic Drive gears
Absolute Encoder
Various communication interfaces
Class 1 clean room compatible
MTBF:>50.000 operating hours
Including Robot Control Center
®

Wafe
r H
andling
17
Handling and more
Dimensions
10
708
335
559
312
Ø 555
555
Ø 300 Wafer
M84
x
182.9
250
225

isel Wafer Handling Vacuum Robot
Wafe
r H
andling
18
Handling and more
Specifications
Cleanliness
Weight
T
R
Z
Z
radial
theta
Maximum speed
T
R
Z
360°/s
500 mm/s
100 mm/s
110 V AC
±0.02°
±0.05 mm
±0.05 mm
1.5” (38.4 mm)
14" (355.6 mm)
380°
1.0 to 2.2 kg
<5x10 Torr-9
Class 1
21.8 kg (48 lbs)
RS-232 [DB9]Option:Ethernet [RJ-45]
150° C (302° F)
80° C (176° F)
Al 6061, Stainless steel,Ferrofluid, Viton
Configuration
Top or bottom of chamber base
Modular, interchangeable arms
Main interface
Power supply
Max. temperature
Max. operating temperature
Exposed materials
Mounting style
Repeatability
Working range
Payload
Leak rate
Characteristics
■
■
■
■
■
■
■
■
■
■
■
■
■
Industry standard footprint and mountingconfigurations
Wafer handling of up to 300mm
High precision user configurable 14", 16" and18" arms
Maximum reliability and precision
Ferrofluidic vacuum seal
Vacuum levels at <5x19 Torr
Real time motion control
Very smooth running
Brushless, maintenance free servo motorswith low inertia
Absolute Encoder
Various communication interfaces
Class 1 cleanliness
MTBF:>50.000 operating hours
-9

isel Wafer Handling Vacuum Robot
Wafe
r H
andling
19
Handling and more
Dimensions
Ø 11.00
B B
AFULL Z STROKE
1.56
1.60
Ø 9.30 [236.2]
17.40
3.35
.49EC
.75(Hard Stop)
D
1
1
2
2
RECOMMENDED WAFER TRANSFEREE PLANE
RECOMMENDED CHAMBER HOLE Ø 9.5" [241.3]
Arm 7 Arm 8 Arm 9 Arm 9 HD
in [mm] 10-20-0046 10-20-0057 10-20-0045 10-20-0050
A 14.381 [365.28] 15.37 [390.3] 18.5 [471] 18.5 [471]
B 7.48 [190] 7.99 [203] 9.6 [245] 9.6 [245]
C 2.14 [54.35] 2.27 [57.8] 2.14 [54.35] 2.7 [68.5]
D 0.87 [22.05] 1.04 [26.5] 0.868 [22.05] 1.2 [31]
E 1.181 [30] 1.14 [29] 1.18 [30] 1.3 [32.5]

Wafe
r H
andling Characteristics
■
■
■
■
■
■
■
■
■
■
■
Class 1 Cleanliness
Feedback: Absolute Encoder
Repeatability: 0.001"
Maximum vertical stroke: 406 mm [16"]
Maximum Vacuum: 1.0x10 Torr
Motors: AC Servo
Elevator weight: 18.2 kg [
-10
40 lbs]
Elevator payload: 5.5 kg [12 lbs]
Surface: aluminium, stainless steel
Sensors: Cassette present
Z stroke: 304.8 mm [12"]
Handling and more
20
isel Vacuum Elevator

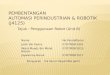
isel Vertical RobotIVR Series
Wafe
r H
andling
DescriptionThe vertical robot series represents a high-qualitycompact design. By using robust-industry-provencomponents and by reducing the number of inter-connecting parts we were able to build a very rigidand dynamic robot system.
trans-porting . respon-sive low-inertia
This new handling solution is suitable forwafers and substrates Extremely
brushless motors, coupled withdirectly driven Harmonic Drive transmissionsguarantee precise and interference-proof armmovements.
The robust-industry-proven external servo controllerwith it's 32-bit real-time kernel provides for aseamless integration of traversing axes and otherperipheries. This controller ensures smooth axistraversing along multiple path segments.
The controller supports RS-232, RS-485, TeachPendant and Ethernet interfaces.
®
Characteristics■
■
■
■
■
■
■
■
■
■
■
Excellent structural rigidity
Maximum speed >1 m/s
Z axis up to 1,200 mm
Optimal acceleration - user programable
Easy connection of a traversing axis to the robot controller
Real-time movement control
Very smooth operation - vibration free
Brushless, maintenance-free servo motors with lowmoment of inertia
Harmonic Drive transmission with zero backlash
Various communication interfaces
MTBF > 50,000 hours
®
Example:Custom solution with1,200 mm axis lengthand lateral axis module
Handling and more
21

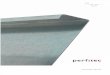
isel Linear TrackILT Series
Lin
ear
Tra
cks
DescriptionDue to their flexibility, the linear tracks of the ILTseries can easily be integrated into your availableinstallation. The tracks are controlled incombination with our IWH series robots.
By this combination of the linear tracks with therobots, the system is very effective and
provides high throughputs.
Depending on the type of application, the lineartracks can be mounted underneath the robots orlateral. The use of brushless servo motors ensuresour linear tracks are operationally dynamic, smoothand service-free.
isel
Characteristics■
■
■
■
■
■
■
High speed and dynamics
Overall lengths user definable, according to the application
Configurable lateral or bottom mounting
Excellent structural rigidity
Robust-industry-proven reliability and precision
Simple to connection to the robot controller
Driven by linear motor or spindle isel
isel
Linear Trackwith lateral mounted
Wafer HandlingRobot seriesIWH-TA
Handling and more
22

isel Linear TrackILT Series
Lin
ear
Tra
cks
isel
isel
Linear Trackwith top-mounted
Wafer HandlingRobot seriesIWH-BA
Handling and more
23


Access
ories
for
Wafe
r H
andle
rs
isel End EffectorsIEE Series
2 05 40 x x x x
Option
0000 = Standard0002 = Flip module0003 = Vacuum control with display9xxx = Customized end effector
8 = Scanner Cyberoptics EX-43QS9 = Scanner Cyberoptics EX-73QS
07 = 2x horse shoe08 = Pocket end effector09 = Exclusion zone grip10 = Exclusion zone vacuum
5 = 2 - 5"6 = 6 - 8"7 = 4 - 8"8 = 12”9 = 8 - 12”
Wafer mapping
End effektor type
Wafer size
0 = No wafer mapping sensor2 = Scanner SUNIX M-DW14 = Thru beam sensor horseshoe
01 = Paddle02 = Horse shoe03 = Edge grip04 = 2x paddle05 = Paddle/horse shoe
Automation componentsfor the semiconductor industry,
product group end effectorsIEE Series 1
x x x x
Handling and more
25
Product Key

PrealignersLPA Series
Pre
aligners Characteristics (Three-axis prealigners)
■
■
■
■
■
■
■
■
■
■
■
Innovative all-in-one design
Alignment cycle time <3.5 Seconds
Repeating accuracylinear. ±0.025 mm, circular ± 0.05°
Contactless measuring via LED and CCD sensor
Integrated scan electronics
Stand-alone capable
Chuck- or pinload as well as wafer size changingwithout mechanical changes
Transparent, semi-transparent, punched andopaque wafers alignable
SEMI, flat and notch wafer specifications
For wafer sizes from 2" up to 12"
Bottom-entry and side-entry cable configurations
Description
The prealigners are innovative, high precision,class 1 compatible prealigner solutions with integratedscan electronics.
LPA series
Characteristics (Single axis Prealigners)
■
■
■
■
■
■
■
■
■
Alignment cycle time <2.5 Seconds
Contactless measuring via LED and CCD sensor
Integrated scan electronics
Chuck load
Wafer size changing without mechanical changes
Transparent, semi-transparent, punched andopaque wafers alignable
SEMI, flat and notch wafer specifications
For wafer sizes from 3" up to 12"
Side-entry and back-entry cable configurations Single axisprealignerwith back-entry cableconfiguration
LPA Series
Three-axisprealignerwith lateral connectorsand PEEK pin/chuck
LPA Series
Handling and more
26

Pre
aligners
LPA
PrealignersLPA Series
Handling and more
27
312 3 V 40 P 1 S 23 S V 500 P N ****
Interface
N
Contact material
PVKSC
Pin length in inch*10
Pin Type
VEC
= Ethernet interface
= Peek= Viton= Kalrez= Stainless Steel= Custom
= Vacuum= Edge handling= Custom
-3
500
Cable entry
SB
Height in mm
23
CCD Sensitivity
SH
= Standard
= Side cable entry= Bottom cable entry
= Standard
= Standard= High
Wafer sizes
25
Number of axes
13
Chuck type
Chuck diameter in mm
23
= 2" to 5"
= Single axis= Three axes
= 2" to 5"
2638583128126EH8EH12EH
VEC
2340404076
Contact material
PVKATC
Chuck encoder
12
= 2" to 6"= 3" to 8"= 5" to 8"= 3" to 12"= 8" to 12"= 6" only= 8" only
= 12" only
= Vacuum= Edge handling= Custom
= 2" to 6"= 3" to 8"= 5" to 8"= 3" to 12"= 8" to 12"
= Peek= Viton= Kalrez= Aluminum= Teflon= Custom
= 10K PPR= 24K PPR
( for edge handling)EH
Standard sizes:
(Standard)
(Standard)
Series Customization code
Not applicable forsingle axis models
Chuck Lighthouse Pins
Product Key
Optional
Example:

Access
ories
for
Wafe
r H
andling
Controllers
Internal Controller■
■
■
■
■
■
■
IWH series 1, IWH-HD series 2, IVR series, prealigners
Control of incremental encoders
3+1 axes
4 inputs, 3 outputs
RS232 and Ethernet communication
RCC software
- I/O extensionOptional:
External Controller■
■
■
■
■
■
■
■
Vacuum Robots, Dual Arm Robots, IWH Series 4
Compact, pre-integrated networkable & I/O control
6+2 axes
32 digital inputs, 14 digital outputs
Autotuning, autocalibration, DWC, adaptive control
Total Graphics GUI
Semiconductor Toolkit Software
Dimensions: 285 x 219 x 81 mm
Internalcontroller
Externalcontroller
RCC softwarescreenshot
SemiconductorToolkit softwarescreenshot
Handling and more
28

Access
ories
for
Wafe
r H
andling
Controllers / Wafer Mapping Sensors
Handling and more
Internal ControllerExternal Controller■
■
■
■
■
■
■
■
IRC 331IRC 331 ex
Suitable for IWH Series 1, IWH HD Series 2, IVR Series,Dual Arm series
Control of incremental and absolute encoders
3 + 1 axes, upgradable
14 inputs, 13 outputs
RS-232 and Ethernet communication interfaces
Robot Control Center (RCC) software
Dimensions: 480 x 180 x 150 mm
Options:- I/O extensions- Hand terminal
RCC softwarescreenshot
Figure:IRC 331ex
29
Wafer Mapping Sensors
IMS-EX43(73)QS■
■
■
IMS-MDW1■
■
■
IMS
Laser class 1 light source
Measuring distance 38 / 56 mm (1,5" / 2,2”)
Sensor flexibly configurable
LED light source
Measuring distance 45 mm (1.75")
PNP / NPN switchable

Access
ories
for
Wafe
r H
andling
Other Accessories
Flip Module■
■
■
■
■
■
IFM-300-2Accurate flipping of wafers with most precisepositioning by means of positive stops
Universal end effector adapter
Mapping sensor
DC Motor with transmission unit
Electrical end-of-travel damping
Continuously variable speeds
Hand Terminal■
■
■
■
■
■
IHTOptimal support when teaching an wafer handler
Keyboard layout optimized for wafer handlers
RS-485
isel
isel
Terminal function
Teach function
Diagnosis function
Handling and more
30

Custom Solutions - Why isel?
Some important reasons to choose us:■
■
■
■
■
We develop, design and manufacture almost all necessarycomponents on our own premises. Thus we achievehighest planning flexibility and extremely shortimplementation phases
We maintain an extensive portion of production in-houseand possess a vast amount of high volumn productionexperience
We offer you excellent service and support throughout theproduct life cycle, from initial design through finalacceptance and production use
The emulation and integration of third party software isvirtually seamless. Your engineering time and costexpenditure is therefore minimal
Due to our location in Central Europe and a favorableinfrastructure we are on the spot in a short time
Project Development
■
■
■
■
■
■
■
■
In order to ensure optimal results, well-trained andexperienced project engineers oversee the projects atiselRobotik. The project procedure typically proceedsas follows:
Define the boundary conditions on-site
Cooperative creation of the customer requirementsspecification
Creation of a conceptional with 3D CAD systems
Issue of a project-specific quotation and statement ofwork including the product requirements specificationwith all project-specific parameters
Release of the product requirements specificationsand the provisional conceptional design
Creation of the detailed conceptional design specificationof the project
Upon your release of the detailed conceptional designspecification we start with the manufacturing of yourcustomized robotic system
System acceptance is completed upon the successfulproduct installation and the meeting all of yourspecifications
design
Cust
om
Solu
tions
Handling and more
31

Note
s and D
raft
s
Notes and Drafts
Handling and more
32

Notes and Drafts
Note
s and D
raft
s
Handling and more
33

Note
s and D
raft
s
Notes and Drafts
Handling and more
34

Refe
rences
References
I O S . I N S T R U M E N T S
HSEB
INNOLASInnovative
Lasertechnologie
Subsequently you'll find a selection of companies thatparticipated in a successful co-operation with us andthat successfully use our products:
Handling and more
35
mechatronic
systemtechnik gmbh

970250 TE005 // 40_2009
i s e l G e r m a n y A GR o b o t i c s D e p a r t m e n tBuergermeister-Ebert-Str. 40D - 3 6 1 2 4 E i c h e n z e l l
Tel.: +49 (0) 66 59 981 - 0Fax: - 776
E-Mail: [email protected] w w . i s e l r o b o t i k . c o m
+49 (0) 66 59 981
Handling and more