Embed Size (px)
DESCRIPTION
第四章 长度测量. 4.1 基本概念. 4.1.1 长度单位:米的定义. 我国和国际的长度单位是米。在 1983 年第十七届国际计量大会上正式通过米的新定义如下: “ 米是光在真空中 1 / 299792458 秒的时 间内所经过的距离。 ”. 米原器. 4.1.2 长度量值传递. 目前,在实际工作中常使用下述两种 实物基准 : 量块和线纹尺 。首先由稳定激光的基准波长传递到基准线纹尺和一等量块,然后再由它们逐次传递到工件,以确保量值准确一致。. 4.1.3 长度测量的标准量. - PowerPoint PPT Presentation
Citation preview

第四章 长度测量

4.1 基本概念
我国和国际的长度单位是米。在 1983 年第十七届国际计量大会上正式通过米的新定义如下:
“ 米是光在真空中 1/ 299792458 秒的时 间内所经过的距离。”
4.1.1 长度单位:米的定义

米原器
4.1.2 长度量值传递
目前,在实际工作中常使用下述两种实物基准:量块和线纹尺。首先由稳定激光的基准波长传递到基准线纹尺和一等量块,然后再由它们逐次传递到工件,以确保量值准确一致。


4.1.3 长度测量的标准量
标准量是体现测量单位的某种物质形式,具有较高的稳定性和精确度。
光波波长:直接使用米定义咨询委员会推荐使用的五种激光和两种同位素光谱灯的任一种来复现。

量块是由两个相互平行的测量面中心之间的距离来确定其工作长度的一种高精度量具。 量块是单值量具,可以组合使用。 量块的公称尺寸和实测尺寸。


量块的精度分级又分等量块按制造精度分为 0 、 1 、 2 、 3 、 4
级,其中 0 级精度最高,按检定精度分为 1 、 2 、 3 、 4 、 5 、 6
等,其中 1 等精度最高。

量块“等”和“级”之间的关系是:( 1 )对研合性及平面平行性偏差规定为: l 、
2 等与 0 级, 3 、 4 等与 1 、 2 级, 5 、 6等与 3 、 4 级分别相同。
( 2 )“等”和‘级”可以代替使用。 例如, 0 、 1 、 2 级量块的中心长度制造
极限偏差分别与 3 、 4 、 5 等量块的中心长度测量极限误差相同,因此, 0 、 l 、 2 级量块可分别代替 3 、 4 、 5 等量块来使用。

3. 光栅、容栅的栅距和感应同步器的线距。 ① 测量效率高; ② 容易实现数字显示和自动记录, ③ 可以实现测量自动化和自动控制。
黑白透射光栅

感应同步器的绕组

4.1.4 长度测量的基本原则
阿贝原则:在长度测量时,为了保证测量的准确,应使被测零件的尺寸线 (简称被测线 )和量仪中作为标准的刻度尺 (简称标准线 )重合或顺次排成一条直线。符合阿贝原则的测量,可尽量减小导轨直线度误差对测量结果的影响。


游标量具 应用游标读数原理(图 3一 1)制成的量具叫游标量具。它在机械制造业中应用十分广泛,可用于测量内外尺寸、高度、深度等。
1. 游标读数原理 游标量具读数部分主要是由尺身与游标组成,其原理是利用尺身刻线间距与游标刻线间距差来进行小数读数,如图所示。
4.2.1 长度计量中常用的量具与量仪
4.2 长度尺寸的测量

Vernier Caliper
图 4 - 2 所示为三用卡尺,其测量范围一般为 0 - 125 和0 一 150mm 两种。

其读数方法如下: 首先读出游标零刻线所指示的左边尺身上的毫米刻线整数;然后观察游标刻线与尺身刻线对准时的格数,将游标对准的格数乘以游标读数值,即为毫米小数;最后将毫米整数与毫米小数相加,即得被测工件的尺寸读数。
如图 4—2所示,游标读数值为 0.10mm ,
则被测工件尺寸为 2 十 0.30 = 2.30mm 。

近十年来发展了一种不用游标读数的新型卡尺,即数显卡尺(又称为电子卡尺),数显卡尺的测量范围为 O~ 150 mm ,分度值为 0.01 mm ,测深为 0~ 115 mm 。数显卡尺的电子部分装有存储器、置零装置和公英制换算装置。
±0.03mm ~ ±0.05mm

测微量具是机械制造中常用的精密量具,它是利用精密螺旋副进行测量,而以微分筒和固定套筒上的刻度进行读数的一种机械式量具。精密螺旋副的螺距为 0.5mm , 由于测微螺杆的精度受到制造工艺的限制,其移动量通常为 25 mm 。
Outside Micrometers
外径千分尺
测微量具

测微量具是应用螺旋副传动原理,将角位移转变为直线位移,直线位移的各行程与螺旋转角成正比,其数学表达式为
L
L—— 测微螺杆的移动距离( mm )
—— 测微螺杆的旋转角度( rad )
P —— 测微螺杆的螺距( mm )
2L P

读数:
14.10mm
2 .测微量具的读数机构和读数方法读数机构由固定套筒和微分筒组成,如图所示。在固定套筒上刻有纵刻线,纵刻线上下方各刻有 25 个分度,每个分度的刻线间距为 1mm ,微分量具中测微螺杆的螺距一船都是 0.5mm ,微分筒圆周斜面上刻有 50 个分度,因此当微分筒旋转一周时,测微螺杆轴向位移 0.5mm ,微分筒旋转一个分度时,测微螺杆移动 0.01mm ,故常用千分尺的读数值为 0.01mm 。

表类量具 此类量具的主要原理是将测量杆微小直线位移通过适当的
放大机构放大后而转变为指针的角位移,最后由指针在刻度盘上指示出相应的示值。
钟表式百分表
分度值为 0.01mm

杠杆齿轮式测微仪
图 (a) 仪器的外形
图 (b) 仪器结构原理图

测杆微小的直线位移经杠杆齿轮机构放大后变为指针的大位移。此种仪器一般用于比较测量,因此刻度尺的示值范围多取为±0. 1mm 其放大比 K为 :

光学比较仪(光学计)
光学比较仪又称光学计,它是一种精度较高的光学机械式计量仪器。光学比较仪主要用作相对法测量,在测量前先用量块或标准件对准零位,被测尺寸和量块(或标准件)尺寸的差值可在仪器的刻度尺上读得。
光学比较仪由光较仪管和支架座组成。光较仪管可以从仪器上取下,装在其它支架座上,做其它精密测量之用。

被测件最大长度 : 180mm

光较仪管是自准直光管和正切杠杆机构的组合。在物镜焦平面上的焦点C发出的一束光,经物镜后变成一束平行光射到平面反射镜。 若平面反射镜与光轴垂直,则经过平面反射境反射的光仍按原路汇聚到发光点C处,即发光点C与象点C’重合。若反射镜与光轴不垂直而偏转一个 a 角,根据反射定律则反射光束与入射光束间的夹角为2 a 。此时反射光束汇聚于象点 C’’, C与 C”’之间的距离应按下式计算:

测量时,应先用标准器具调整零位,即平面反射镜的镜面与光较仪中的光轴相垂直。由于采用比较测量法,因此当被测尺寸和标准尺寸有差异时,测杆就将沿着导轨做直线移动,从而推动平面反射镜 P 绕支点O摆动。测杆移动的距离为 s时,反射镜偏转了 a 角,其关系为
式中, b为测杆到支点O的距离。
s btg

这样,测杆的微小移动 S就可以通过正切杠杆机构和光学装置放大,变成光点和象点间的距离 CC” ,其放大比为
光学计的目镜放大倍数为 K2 ,因此光学计的总放大倍数为 KK2 倍。 ±± (( 0.20.2 ~~ 0.250.25 )) umum

测长仪和测长机结构中带有长度标尺,通常是线纹尺,也可以是光栅尺。测量时,用此尺作为标准尺与被测长度做比较,通过显微镜读数以得到测量结果。
量程较短的称为测长仪。根据测量座在仪器中的布置分立式测长仪和卧式万能测长仪(简称万能测长仪)两种。立式测长仪用于测量外尺寸;卧式测长仪除能测量外尺寸外,主要用于测量内尺寸。
量程在 500mm 以上的仪器体形较大,称为测长机。测长机常用于绝对测量。
测长仪和测长机


工作台 1 上放置被测件 2 ,通过测量轴体 4 上的可换测量头 3 与被测件接触测量。测量轴体 4 是一个高精度圆柱体,在精密滚动轴承支持下,通过钢带 8,滑轮9,平衡锤 12 和阻尼油缸 13完成平稳的轴向升降运动。配重 7用来调整测量力。
测量轴体的轴线上固定有基准标尺 ( 玻璃刻尺 )5 ,其上有 l01条刻线,刻度间隔为 1mm 。由光源 11发出的光,经透镜 10 ,再透过基准玻璃刻尺,将毫米刻线影象投射入螺旋读数显微镜 6 ,进行读数。

目镜 8的显微读数镜头中,可看到三种刻线重合在一起:
一种是玻璃刻线尺 5 上的刻度(图中的 7、 8),其间距为 lmm ;
一种是目镜视野中间隔为 0.lmm 的刻度(图 中的 0至 10 )
一种是有 10圈多一点的阿基米德螺旋线刻度(图中上部的 35 、40 、 45 ),螺旋线的螺距为 0.1 mm ,螺旋线里面的圆周上刻有 100格圆周刻度,因此每格圆周刻度代表 0.001mm 。
图的读数为 7.141 mm 。
不确定度: ± ( 1.5+ L/100 )um

卧式测长仪
卧式测长仪又称为万能测长仪。 万能测长仪是把测量座作卧式布置,测量轴线成水平方向的测长仪器。万能测长仪除了对外尺寸进行直接和比较测量之外,还可配合仪器的内测附件测量内尺寸。

卧式测长仪(万能测长仪)

卧式测长仪的毫米刻线尺和测量轴水平卧放在仪器的底座上,并可在底座的导轨上作左右方向的移动;它主要由底座 7、测座 1 、万能工作台 5 和尾座 6组成。

测长机是机械制造中测量大尺寸的精密仪器,仪器的种类很多,按其测量范围来分,有 1 ,2 , 3 , 4 , 6m ,甚至还有 12m 的。该仪器主要进行绝对测量,但也可用于比较测量。绝对测量是将被测工件与仪器本身上的刻度尺进行比较;而相对测量则是将被测工件和一个预先用来对准仪器零点的标准件 (如块规等 )相比较,从仪器上读取两者之差值。
1 . 仪器工作原理
测长机


图中 6 是机身,在它的床面上镶有刻线尺 7和分划板 14 。刻线尺 7上从 0 到 100mm内共有刻线1000条.故每格为 0.1mm ;分划板 14共有 10块,每块相距 100mm ,在每一块上面刻着两条刻线和 0 , 1 , 2 ,…, 9之间的一个数字,分别代表每一块分划板距刻线尺 7 零刻线的距离的分米数值。

光线自光源 15 ,经聚光镜,滤光片、反射镜后照亮了分划板 14 。由于分划板位于物镜组 11 的焦平面上,故光线通过分划板 14后,经直角棱镜 12 和物镜组 II后便形成平行光束,经过同样焦距的物镜组 9和棱镜 8后,使分划板 14 成象于刻线尺 7上 (因刻线尺 7 亦放置在物镜组 9的焦平面上 )。通过读数显微镜 3进行读数。小于 0.1mm 的读数由光学计管 2完成。


显微镜法是将被测件的尺寸、轮廓或用光干涉法产生的干涉条纹等,经过显微放大,以便于观察测量。被测件 AB位于物镜的物方焦点 F1 之外,但不超过距物镜两倍焦距的距离,被测件被物镜放大成一倒立的实象A’B ,此实象位于目镜的物方焦面右方的分划板上,经目镜再次放大在明视距离 J = 250mm处成一可从目镜视场中看到的虚象A'B '
显微镜光学系统
工具显微镜
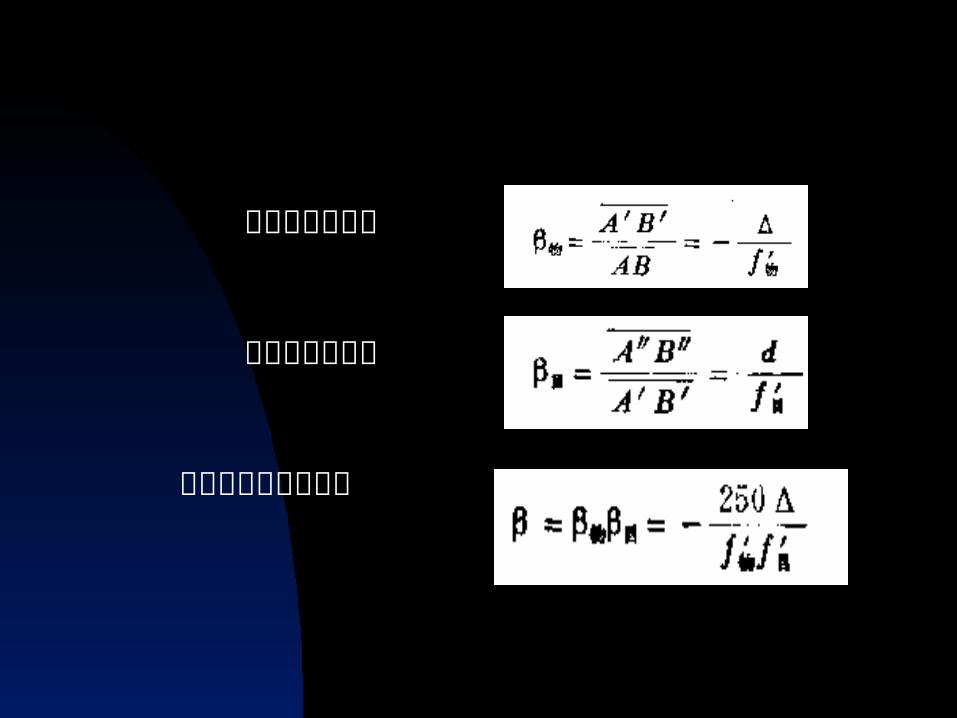
物镜放大倍率为
目镜放大倍率为
显微镜的放大倍率为


非接触瞄准
照明光源射出的光经滤色片 2 、可变光阑3 、反射镜 4 和聚光镜 5 后变为平行光照明被测工件。经物镜放大后的工件轮廓成象在分划板 11 上,再经目镜放大后观察。根据所要求的放大倍数,可更换物镜。在分划板前设置一正象棱镜,使视野内所观察的象为正象。目镜头可以更换 .


图为万能工具显微镜接触瞄准系统——光学灵敏杠杆的工作原理示意图。由照明光源 1照亮的分划板 2 上的三对双刻线,经透镜 3 后由与测杆相连的反射镜 4反射,再经物镜 5 放大,最后成像在测角目镜分划板 6 上。反射镜 4随测杆摆动时,三组双刻线的象随之左右移动。仅当测杆中心线与显微镜光轴重合时,双刻线的象位于米字分划板的中心位置。

在工具显微镜上用光学灵敏杠杆测量端面定位孔的直径时,可用两种方法确定采样点的位置。
1. 找拐点法
2. 测弦找中点法
2 1D x x d

立式接触式干涉仪是一种高精度测微仪。
立式接触式干涉仪

用接触式干涉仪测量时使用白光,即移出滤色片,使视场中出现零级黑条纹。根据测头先后与标准件及被测件接触时零级条纹位置间的距离,即可测得被测量相对于标准量的偏差值。
例如检定量块:测头与标准量块接触时,零级条纹位于 a =- l (格),测头与被检量块接触时,零级条纹位于 a=+4格,若仪器分辨力 i=0.1um ,则被测量块相对于标准量的中心长度偏差为 i ×(a2-a1)=+0.5um
接触式干涉仪测量方法

干涉测长是激光在几何量测量中最重要的应用。光波干涉法作为精密测量长度和位移的有力手段问世已久.其测量精度很高。但在激光问世以前,由于缺乏亮度高、单色性好的光源,干涉办法的应用有着许多局限性,激光的出现则为干涉测长提供了极好的相干光源。 (激光具有方向性好、能量高度集中、单色性好、干涉能力强的优点)。
激光干涉测长仪

激光干涉测长仪原理图

电动量仪 电动量仪是将被测尺寸即测杆的位移转变为电信号实现尺寸测量的一种仪器。此类仪器一般由测量装置(或传感装置)、电器装置和显示装置三部分组成。
电动量仪种类很多,一般可分为电感式、电容式和光电式等。
由于电动量仪灵敏度和精度很高,测量装置和显示装置可以分离,所以有利于进行远距离测量和实现测量自动化。


差动式电感传感器

总结:
绝对测量法:仪器示值为被测量的绝对值,常以刻度尺、光栅尺等作为测量基准,一般具有绝对零位,示值范围较大。如游标卡尺、千分尺、测长仪、测长机、工具显微镜等。
相对测量法:仪器示值为被测量相对于某一定值标准量的偏差值。标准量应尽可能与被测量具有相同定义及公称值。用于相对测量的仪器多称作测微仪或比较仪,一般具有放大倍数大,示值范围较小、测量精度高、零位可调的特点。如杠杆百分表,光学比较仪、接触式干涉仪、电感测微仪等。
直接测量法:将被测量直接和标准量进行比较。 可分为绝对测量和相对测量

间接测量法:测量得到的量值是采样点的坐标(坐标测量法)或其他与被测量有确定函数关系的参量,被测量的值须通过计算求得。•微小尺寸的间接测量•大直径的间接测量•坐标测量法

随着科学技术和工业生产的发展,产品的小型化或微型化越来越成为一个重要的分支,因而微小尺寸的测量越来越多:如细丝、小孔、镀层厚度、集成电路中的氧化层厚度、各元件间的微小距离、计算机中磁头与磁盘间的微小间隙等等;而且精度要求也越来越高,如超大规模集成电路中要求位置的测量精度为 0.lum 的数量级。显然,现有的传统测量方法和仪器是难以完成任务的,迫切地要求提出新的测量方法,下面将介绍几个测量方法的实例。
4.2.2 微小尺寸测量

一、用激光衍射法测量金属细丝直径 一般的钢丝直径常用电感测微仪以接触法进行测量,这种方法受测量力的影响很大,即使在测量力较小的情况下,其相对测量误差也是较大的,而且容易引起细丝的弯曲变形。此外,如测力过小,也由于测量不稳定而无法保证测量精度。近年来由于激光技术的发展,为测量细丝直径提供了新的测量原理和方法。

夫琅和费衍射原理
当光源和衍射场 (即屏幕 P)都距衍射物 (小孔、狭缝等 )无限远时的衍射称为夫琅和费衍射 (或平行光衍射 ),实际上只要光源、屏幕离衍射物有足够大的距离部可认为是夫琅和费衍射。

式中 K = 1 , 2…正整数。正负号表示亮暗条纹对称地分布在中央亮条纹的两侧,= 0给出了中央亮条纹 P0 的中心位置。由图可见,随着衍射角 的增加,亮条纹的光强将迅速降低,暗点位置是等距分布的。如采用激光作为光源,由于能量高度集中,条纹可以更加清晰,衍射级次也更高 (即能见到的衍射条纹致目多 ) 。
衍射条纹的光强分布图

如图所示,设被测细丝为 d ,相当于狭缝。我们采用激光作为光源,由于其发散角很小,可认为是平行光,所以可免除透镜 L1 ;并将衍射屏幕放置离细丝较远处(譬如 l> 500mm),这样又可免除透镜 L2 。于衍射场P处即可获得一组明暗相间的衍射条纹,只要测得衍射条纹距屏幕中心的距离 Sk ,便可求得细丝直径。由于 l»a ( 即 d),此时角很小,故可取 :

sin tan
sin 22
sin /
k
k
k
k
Sl
a k k
a a S l k
k la d
S
S k S
la d
S
S k
由于衍射条纹的条件是:
故:
于是可得:
或者由于 ,可得
式中:为条纹间距; 为衍射条纹级数。

二、光纤直径的测量
激光能量法

一、用弦高法测量大直径的孔和轴
如图所示为手持式测量装置。在装置基体 1 的中央放着指示表 4 ;两侧装有带滚柱 3 的支杆 2 。
这种装置在测量前应在平板上进行调整指示表的零位,即两个滚柱与平板表面接触,而在指示表的量杆下端,垫以适当的块规。
4.2.3 大尺寸的测量

2 2( / 1)D l H H
2 2( )2 2
D d D dH l

2 2( )2 2
D d D dH l

4.2.3坐标测量法坐标测量法是几何量测量最基本最常用的测量方法,通过测量被测几何要素上若干个点的位置坐标继而求得被测参量。包括采样读数和数据处理两个步骤。
单坐标、双坐标、三座标。
实现测量的关键是建立被测参量和采样点在测量机坐标系中的坐标关系模型。

三坐标测量机机架结构
三坐标测量机的主体主要由以下各部分组成:底座、测量工作台、立柱、 X及 Y向支撑梁和导轨、 Z轴部件及测量系统(感应同步器、激光干涉仪、精密光栅尺等)、计算机及软件。
CMM


Chameleon 7107 三坐标测量机 美国布朗·夏普公司制造测量范围 :650×1000×650

4.3 形位误差的测量形位误差测量是将被测要素和理想要素进行比较,从而用数值描述实际要素与理想要素形状或位置上的差异。每个参数的测量过程包括测量和评定两个阶段。

4.3.1 圆度误差圆度误差指包容同一正截面实际轮廓且半径差为最小的两同心圆的距离 fm
max minmf R R

最小包容区域法最小,最小二乘法稍大
圆度误差的评定方法

圆度仪测量法

4.3.2 表面粗糙度测量定义:表面粗糙度测量是一种微观几何形状
误差。特点:量值小(小于 1mm),变化频率高,所以粗糙度测
量方法必须具有分辨率高和频响快的特性。
测量方法:1.接触式轮廓仪(触针式轮廓仪) 电感式轮廓仪、激光干涉式、压电式轮廓仪。


表面粗糙度的测量基准线原则上要求与被测表面的理想形状一致,但在实际测量中难以实现。比较常见的是利用与传感器壳体安装成一体的导头建立相对测量基准。


2 、非接触式轮廓仪

国家标准中规定的评定基准为轮廓中线:最小二乘中线和算术平均中线。
表面粗糙度的高度评定参数:
轮廓算术平均偏差 :
1
( ) /n
a ii
R y n
微观不平度十点高度:
5 5
1 1
( ) / 5z pi vii i
R y y
轮廓最大高度:
max maxy p vR y y
表面粗糙度的评定方法

4.4 纳米测量技术
定义:尺度为 0.01nm-100nm 的测量技术。
一、扫描隧道显微镜( STM) 1981 年, IBM公司苏黎世实验室研制成功了世界第一台新型的表面分析仪器——扫描隧道显微镜( Scanning Tunneling Microscope,以下简称 STM)。它的出现,使人类第一次能够实时地观察单个原子在物质表面的排列状态和与表面电子行为有关的物理、化学性质。

STM 的基本原理是利用量子力学中的隧道效应,在样品与探针之间加一定的电压,当样品与针尖距离非常接近时,样品和针尖之间将产生隧道电流I∝V·exp (-2kd) ,V是探针与样品之间的电压,d为样品与针尖距离, k为常数。从上式可以看出,I与d成指数关系,即隧道电流I对样品的微观表面起伏特别敏感,当d减小0 .1nm时,I将增加一个量级。

结构示意图
我们可以把扫描隧道显微镜的工作过程总结为:利用探针针尖扫描样品,通过隧道电流获取信息,经计算机处理得到图象。

1990 年, IBM公司的科学家展示了一项令世人瞠目结舌的成果,他们在金属镍表面用 35 个惰性气体氙原子组成“ IBM” 三个英文字母。
二、原子力显微镜( Atomic Force Microscope 简称 AFM )
原子力显微镜的设计思想是这样的:一个对力非常敏感的微悬臂,其尖端有一个微小的探针,当探针轻微地接触样品表面时,由于探针尖端的原子与样品表面的原子之间产生极其微弱的相互作用力而使微悬臂弯曲,将微悬臂弯曲的形变信号转换成光电信号并进行放大,就可以得到原子之间力的微弱变化的信号。 原子力显微镜同样具有原子级的分辨率。由于原子力显微镜既可以观察导体,也可以观察非导体,从而弥补了 STM的不足。

左图是目前商品化的原子力显微镜仪器普遍采用的激光检测法示意图。





























