Embed Size (px)
DESCRIPTION
第十四章 机械的平衡及调节 回转体平衡和机械调速是两个不同的机械动力学问题。在机械设计中,特别是设计高速机械和精密机械时必须予以考虑。 §14 — 1 机械平衡的目的、分类及方法 1. 目的 :机械运动时,各运动构件由于制造、装配误差,材质不均等原因造成质量分布不均,质心做变速运动将产生大小及方向呈周期性变化的惯性力。 - PowerPoint PPT Presentation
Citation preview
第十四章 机械的平衡及调节回转体平衡和机械调速是两个不同的机械动力学问题。在机械设计中,特别是
设计高速机械和精密机械时必须予以考虑。§14—1机械平衡的目的、分类及方法
1.目的:机械运动时,各运动构件由于制造、装配误差,材质不均等原因造成质量分布不均,质心做变速运动将产生大小及方向呈周期性变化的惯性力。
( 1)在构件运动副中引起附加动压力。 ( 2)加剧运动副磨损,降低机械效率。 ( 3)降低构件有效承载能力,缩短寿命。 ( 4)引起机器及基础产生强迫振动,影响机械工作质量。 ( 5)当震动频率接近系统的共振范围时,将会波及到周围的设备及厂房建筑。 对于高速、重型和精密机械,惯性力的不良影响更为严重。为了完全或部分消除这些不良影响,需设法减少或消除惯性力,这就是机械的平衡问题,也是机械平衡的目的所在
2. 分类:1). 转子平衡转子平衡问题:绕固定轴线回转的构件的惯性力和惯性力矩的平衡问题。刚性转子的平衡问题:转子转速低于一阶临界转速,挠曲线变形忽略挠性转子的平衡问题:转子转速高于一阶临界转速,其旋转轴线的挠曲线的变
形不能忽略。
2) .机构平衡
机构的平衡问题:对整个机构而言,所有构件的惯性力和惯性力矩,可以合成为通过机构总重心的总惯性力和总惯性力矩。它们可被部分或完全地平衡。有关它们的平衡问题即为机构的平衡问题。
机构的平衡:为了减小或消除机构中各构件的惯性力和惯性力矩所引起的振动、附加动压力和减小输入转矩波动而采用的改善质量分布、附加机构等的措施,称为机构的平衡,如内燃机曲柄连杆机构等的平衡。 3. 研究机械平衡的方法计算法:图解法与解析法。图解法简单方便;解析法计算结果准确,它们皆用在各不平衡质量大小及质心位置已知的情况下。试验法则适用于各平衡质量大小及质心位置未知的情况下或虽经计算法加平衡配重平衡,但实际由于材质不均匀、安装制造误差等原因,往往仍达不到预期的要求时,可用试验法平衡之。这里主要阐述图解法。
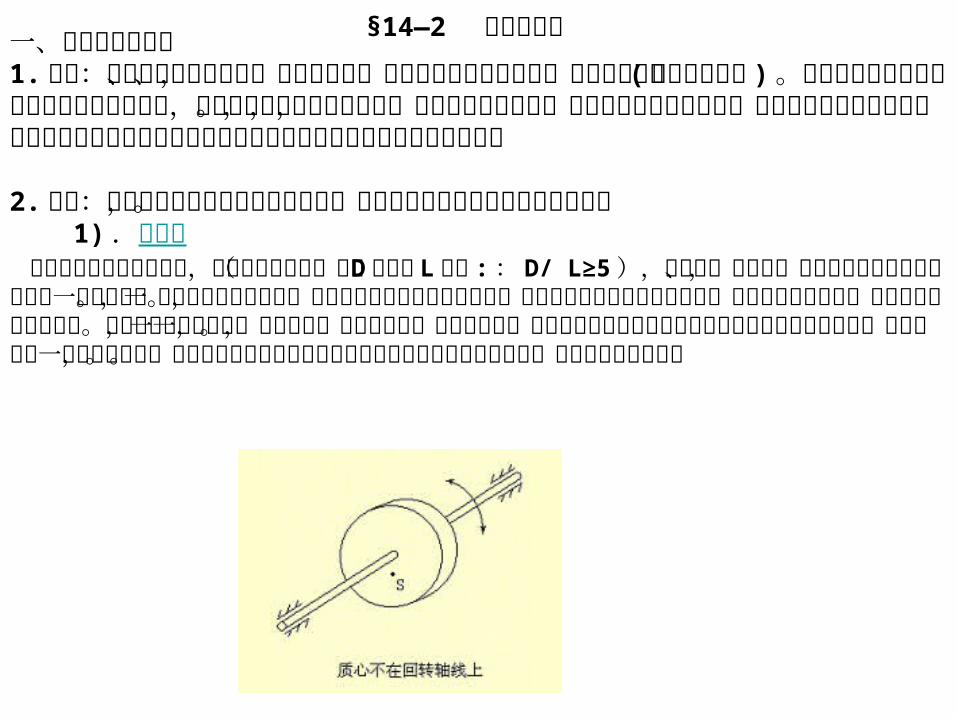
一、转子平衡的分类1.概念:由于转子结构不对称、材质不均匀、制造和安装误差等原因,均会引起偏心 (质心偏离形心 )。由于偏心将导致转子运转时产生离心惯性力,从而使转子处于不平衡状态。在转子上加减配重,以改善转子的质量分布,从而保证转子在运转时,由不平衡而引起的振动或振动力减小到允许范围内的措施称为转子平衡
2.分类:根据转子不平衡质量的分布情况,转子的平衡可分为静平衡和动平衡。 1) .静平衡 对于轴向尺寸较小的零件,也称为盘状零件(直径 D与宽度 L之比 :: D/ L≥5 ),如飞轮、砂轮等,其质量分布可以近似认为在同一回转面内。当回转件匀速转动时,各质量所产生的离心力构成同一平面内交于回转中心点的力系。如果该力系不平衡,则它们的合力不等于零。为了使力系达到平衡,只需在同一平面内加上一个平衡质量,使其所产生的离心力等于原离心力的合力且方向相反。这样,加上一个平衡质量后,由回转件上各质量所产生的离心力组成的力系就达到平衡。这种平衡称静平衡。
§14—2 转子的平衡
2).动平衡
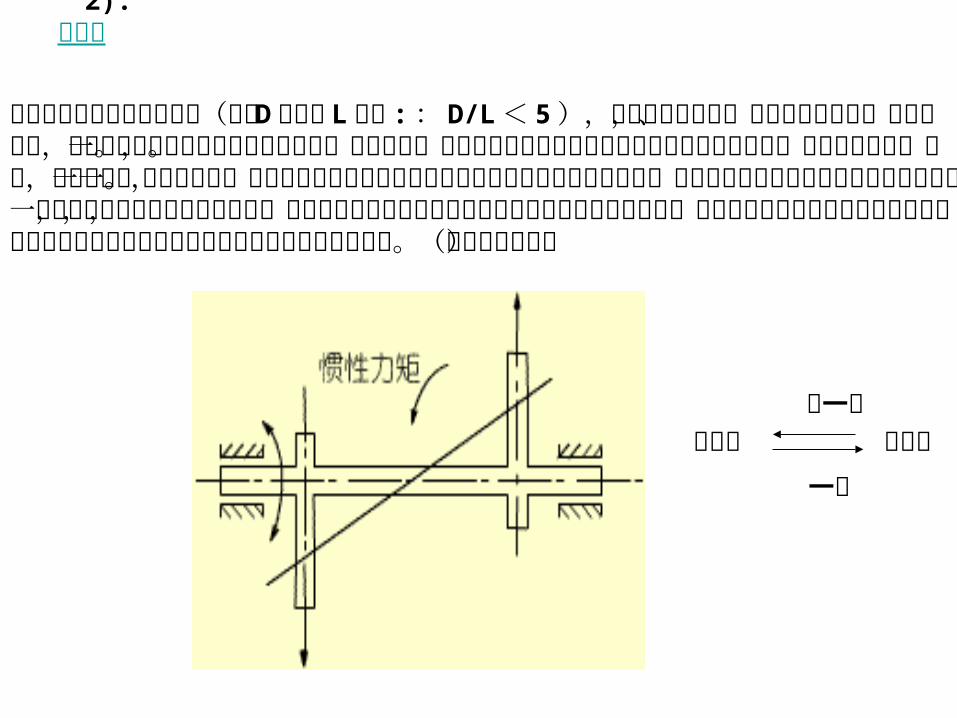
对于轴向尺寸较大的回转件(直径 D与宽度 L之比 :: D/L < 5 ),即称为轴类零件,如电动机的转子、机床主轴等,其质量分布不能近似地认为是位于同一回转面内。这类回转件转动时产生的离心力不再是平面力系,而是空间力系。因此,单靠在某一回转面内加一平衡质量的静平衡方法不能使这类回转件转动时达到平衡。对于这种转子的不平衡问题进行平衡时,一般的方法是先选定两个辅助平面,再将各个质量按其所在平面与两辅助平面的距离的比值,按比例将质量分解到两辅助平面上,最后再采用静平衡的方法使这两个辅助平面达到静平衡。(亦称双面平衡)
动平衡 静平衡一定
不一定
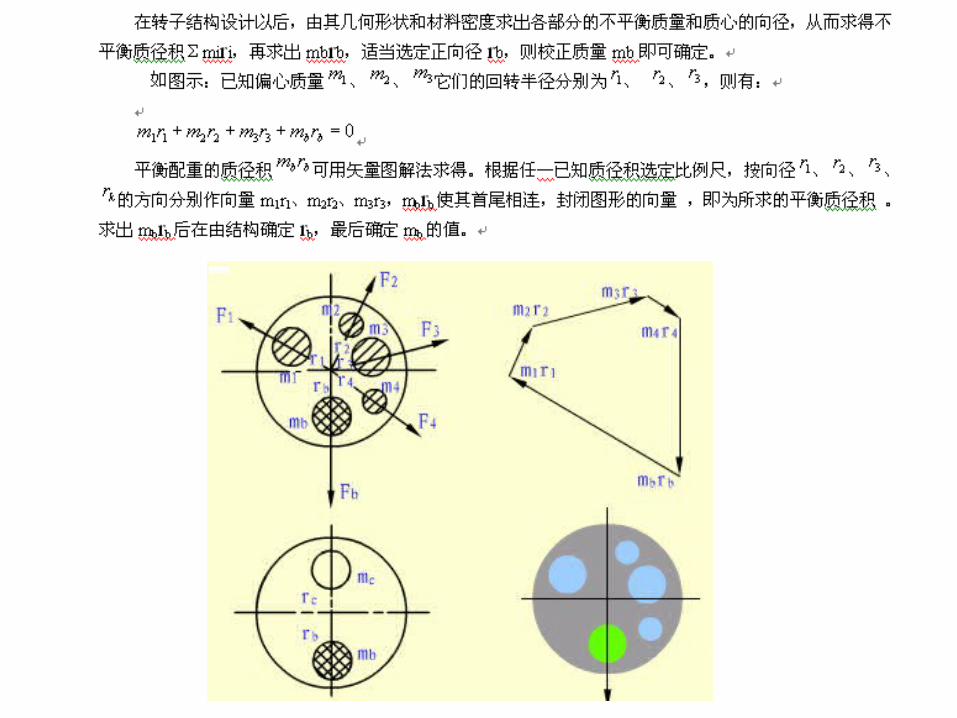
二、转子平衡的计算1.静平衡的计算原理:对于轴向宽度不大的转子,其质量可近似认为在同一回转平面内,回转
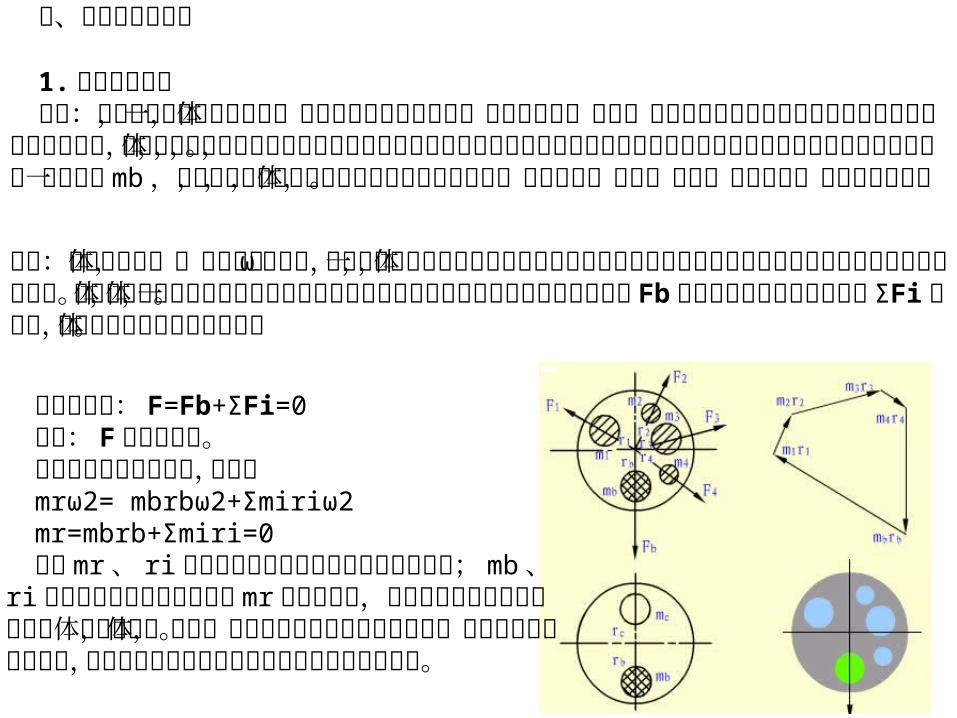
体其质量不平衡产生的离心惯性力可用平面汇交力系表示,因合力不为零回转体不平衡,产生不均匀转动,转速逐渐降低,静止时合力方向在铅垂线轴心下方。在铅垂线上方,做一平衡质量 mb,使其产生的离心力与汇交力系合力矢大小相等,方向相反,这样,回转体才能平衡,保持均匀转动。计算:如图示回转体,以角速度ω回转时,其质量产生的离心惯性力构成了一个平面汇交力系,若此力系的合力不为零,则该回转体不平衡。若使回转体平衡,则应在回转体内,增加或减少一平衡质量。使其产生的离心力 Fb与原力系的离心力的矢量和 ΣFi等于零,此时回转体必达到平衡状态。平衡的条件: F=Fb+ΣFi=0式中: F为总离心力。分别用质量和向径表示,可写成mrω2= mbrbω2+Σmiriω2mr=mbrb+Σmiri=0式中 mr 、 ri 分别为回转平面内各偏心质量
及其向径; mb、 ri 分别为平衡质量及其向径。mr称为质径积,若等于零则表示总质心与回转体轴线重合,回转体质量对回转轴线静力矩等于零,称为静平衡。由此可见,机械静平衡的条件是所有质径积的矢量和等于零。
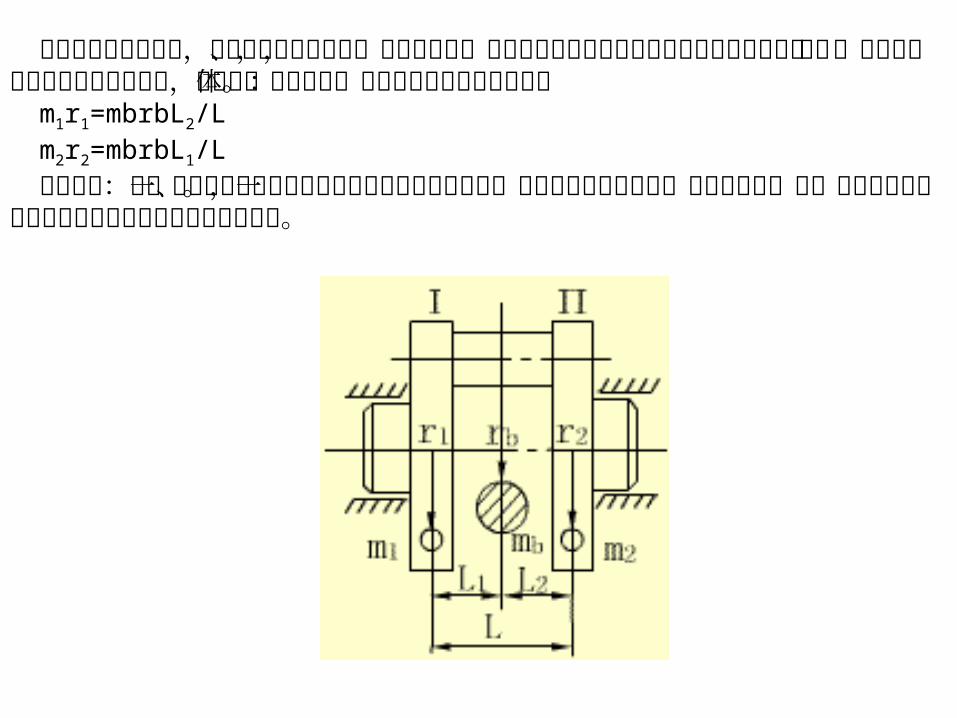
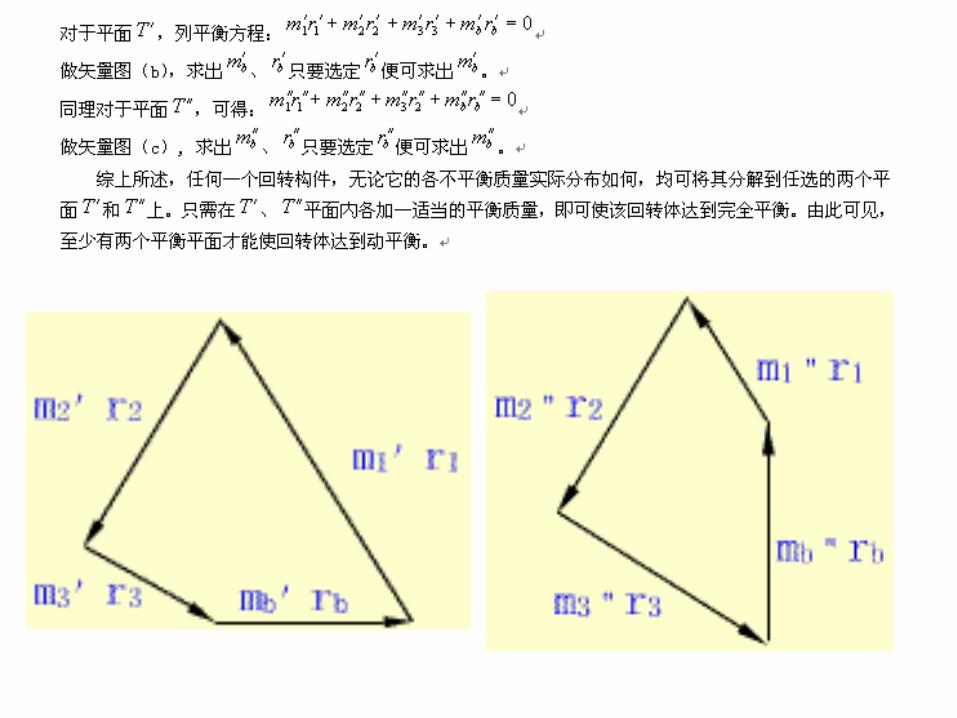
有时受实际结构所限,不便在该回转面内增、减平衡质量,如图示单缸曲轴则需另选两个校正回转平面Ⅰ和Ⅱ,在两个校正平面内增加平衡质量,使回转体得到平衡。由力系的平行合成原理得:
m1r1=mbrbL2/Lm2r2=mbrbL1/L由此可知:任一质径积都可用任意选定的两个校正回转平面Ⅰ、Ⅱ的两个质
径积代替。若矢经不变,任一质量都可用任选的两个回转平面内的两个质量来代替。
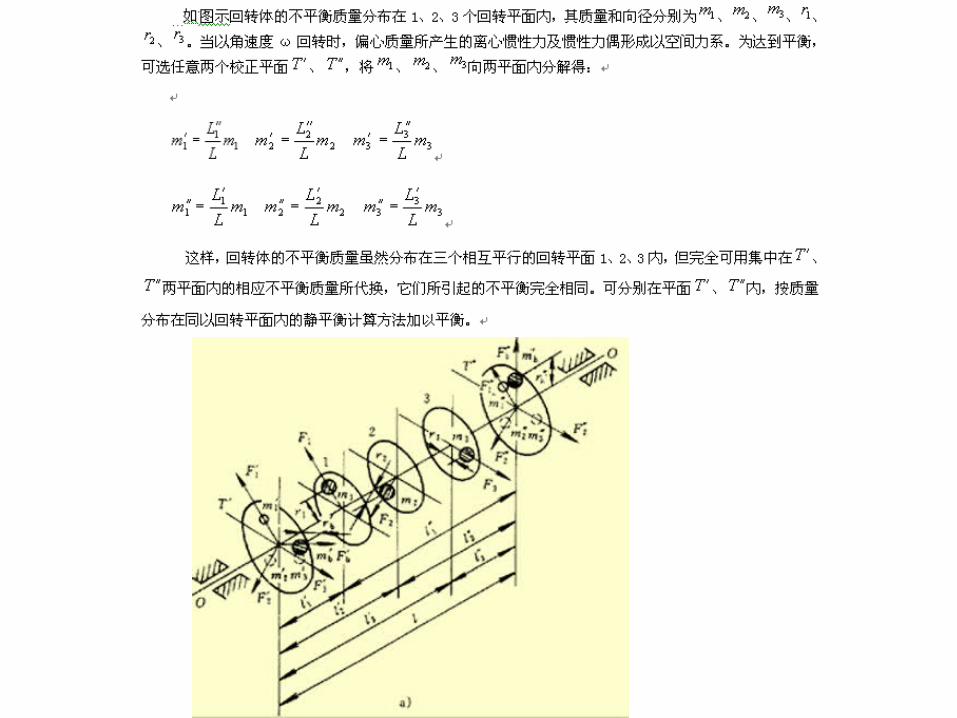
轴向尺寸较大的回转体,其质量不可能分布在同一回转平面内,但可以看作是分布在垂直于轴线的若干个相互平行的回转平面内,各平行平面内的不平衡质量所产生的离心力就形成了空间力系。这类回转体即前面提到的动不平衡,为使动不平衡的回转体达到完全平衡,必须满足如下条件:ΣFi== 0 ΣMi== 0即不仅使其各不平衡质量所产生的惯性力之和为零,而且要使这些惯性力所形
成的惯性力偶矩之和也为零。满足上述条件的平衡称为动平衡。 由于动平衡同时满足了静平衡条件,故达到动平衡的回转体一定是静平衡的,
但满足静平衡的回转体不一定达到动平衡。
2.动平衡计算
三、转子的平衡试验动平衡试验一般用于 D/d<5 或有特殊要求的回转体,由动平衡得知,必须分别
在任意选定的两个校正平面内各加适当的质量,才能使回转体达到平衡。先令回转体在动平衡机上运转,然后在两个选定平面内分别找出所需平衡质径积的大小和方位,从而达到平衡。1. 转子的静平衡试验法 对于经平衡计算在理论上已经平衡的转子,由于其制造精度和装配的不精确、
材质的不均匀等原因,就会产生新的不平衡。但这种无法用计算来进行平衡,而只能借助于实验平衡。平衡实验是用实验的方法来确定出转子的不平衡量的大小和方位,然后利用增
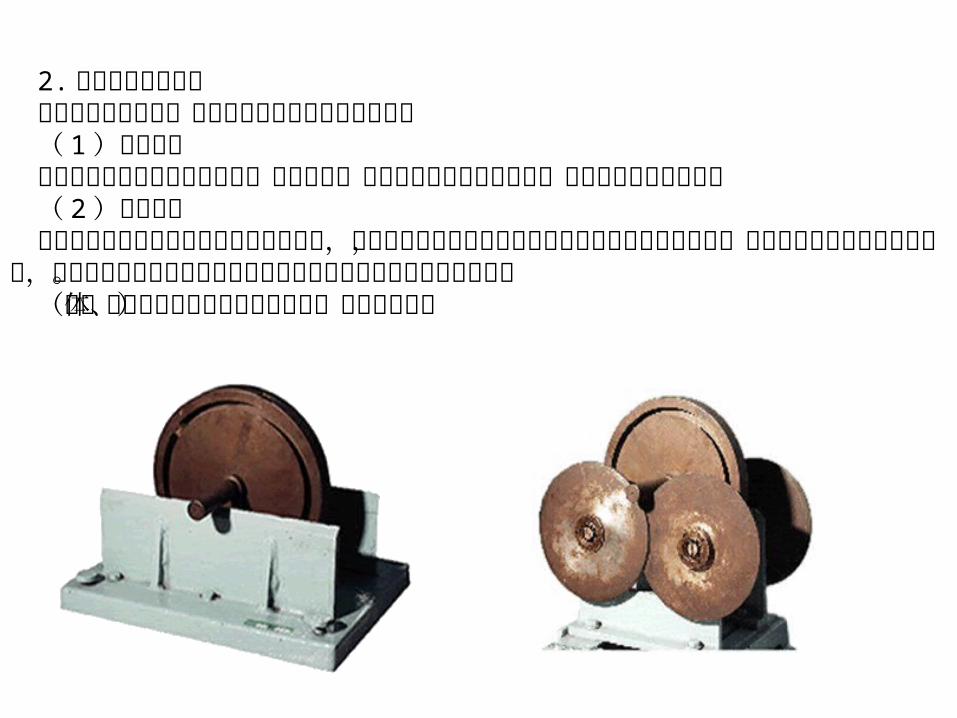
加或除去平衡质量的方法予以平衡。(1) 实验设备 : 导轨式静平衡仪、滚轮式静平衡仪。(2) 实验方法:先将转子放在平衡仪上,轻轻转动,直至其质心处于最低位置
时才能停止 ,此时在质心相反的方向加校正平衡质量,再重新转动。反复增减平衡质量,直至呈随遇平衡状态,即转子达到静平衡。( 3)实验特点:结构简单、操作方便。能满足一定精度要求,但工作效率低。
对于批量转子静平衡,可采用一种快速测定平衡的单面平衡机。
2. 转子的动平衡试验转子的动平衡实验一般需在专用的动平衡机上进行。( 1)实验设备动平衡实验机主要由驱动系统、支承系统、测量指示系统等部分组成。例如光
电式动平衡机。( 2)实验原理目前多数动平衡机是根据振动原理设计的,测振传感器将因转子转动所引起的
振动转换成电信号,通过电子线路加以处理和放大,最后用仪器显示出被测试转子的不平衡质量矢径积的大小和方位。(具体操作请参考试验机的工作原理、及详细资料)
一械速度波动的调节的目的和方法机械是在稳定运转阶段内工作,其速度有两种情况:一是作等速稳定运转;二
是作周期性变速稳定运转。当机械作周期性变速稳定运动时,在一个周期内,驱动功等于阻力功,但在周期的每一瞬间,驱动功与阻力功两者并不相等;当驱动力功大于阻力功时,动能增加,出现盈功;当驱动力功小于阻力功时,动能减少,出现亏功。机械动能的增减,引起速度的波动,这种速度波动称为周期性速度波动。调节周期性速度波动最常用的方法,是在机械中加一个转动惯量足够大的飞轮。
盈功使飞轮动能增加,亏功使动能减少。飞轮的动能变化为
§14—4 机械速度波动的调节
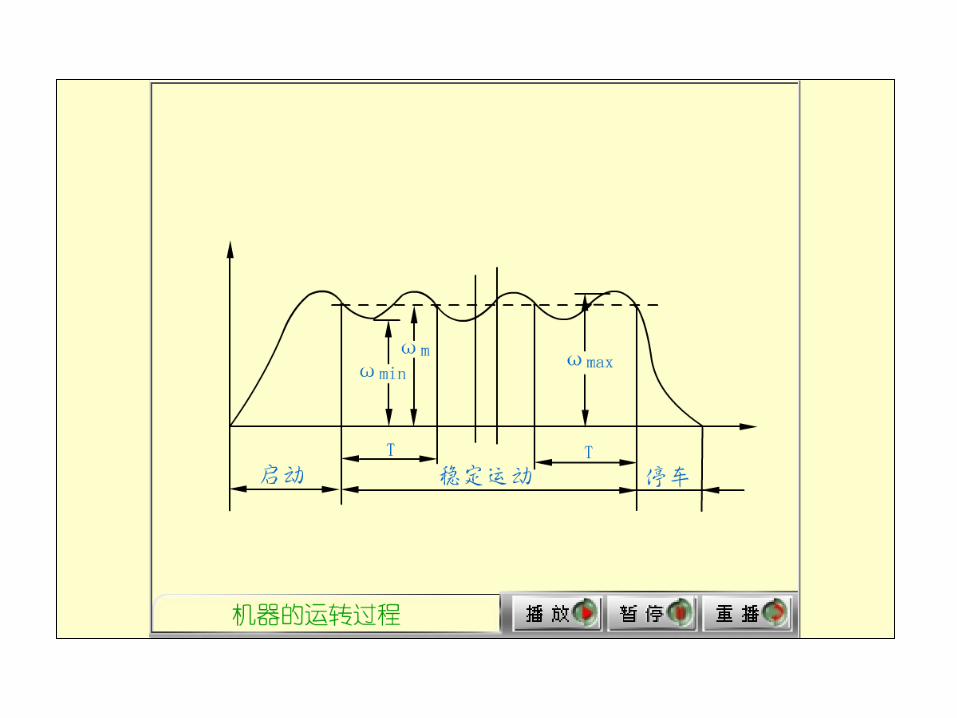
当机械能量增减的规律不变时,飞轮可使机械速度的波动减少,适当设计飞轮的转动惯量可把周期性的速度波动限制在允许的范围内,如图示,虚线为未安装飞轮时的速度波动,实际为安装飞轮后的速度波动。
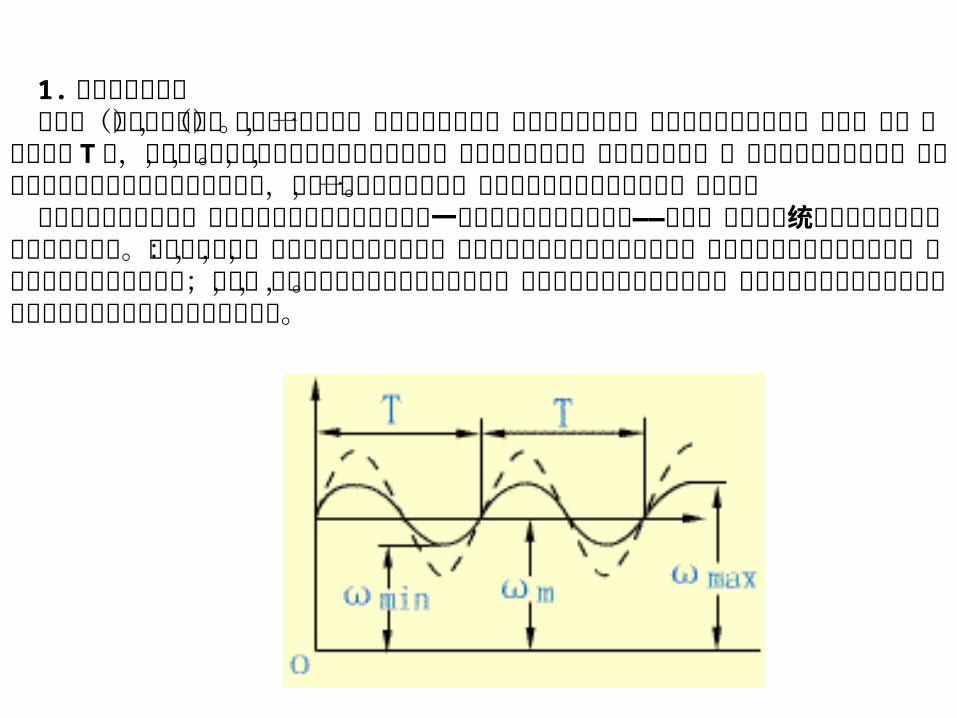
1. 周期性速度波动当外力(驱动力和阻力)作周期性变化时,机械的运动速度(如主轴的角速
度)也会作周期性的波动。另外,在一个运动周期 T内,当驱动力所作的功与阻力所作的功相等时,以主轴回转为例,角速度的波动。,在周期中的某个时刻,驱动力所作的功与阻力所作的功并不相等,因而造成了速度的波动,但速度的平均值还是稳定在一定值上。
对于周期性速度波动,调节的主要方法是在机械中加入一个转动惯量很大的回转件——飞轮,以增加系统的转动惯量来减小速度变化的幅度。飞轮调速原理:机械作变速稳定动转时,当驱动功大于阻力功出现盈功时,飞轮将多余的动能贮存起来,以免原动件的转速增加太多;反之,当驱动功小于阻力功出现亏功时,飞轮将贮存的动能释放出来,以使原动件的转速降低不大。这样可以减小机械运转速度变化的幅度。
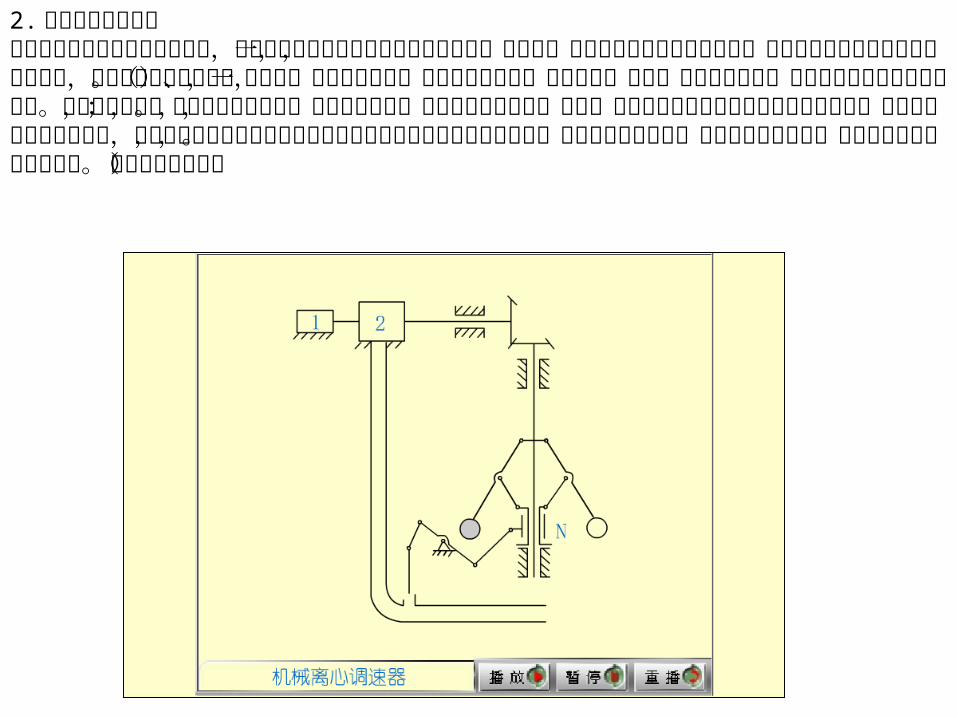
2.非周期性速度波动如果驱动力或阻力无规律地变化,会引起机械运转速度波动规则随机且无一定周期,这种现象称为非周期性波动,此时飞轮已不能达到调节速度的目的,需采用特殊的调速器。当外力(驱动力和阻力)的变化是随机的、不规则的,没有一定的周期性时,机械和速度也呈非周期性波动。当盈功过多时,速度可能变得太快;当亏功过多时,速度可能变得太慢。为此,必须调节驱动力作功和阻力作功的比值,此时飞轮已不能满足要求,只能采用特殊的装置使驱动力所作的功随阻力作功的变化而变化,并使两功稳于平衡,以使机械平稳运转。这种特殊的装置称为调整器。(见调速器的原理)
一定时, δ 越小,表示机械运转越均匀,运转的平稳性越好。不同机械其运动平稳性的要求不同,许用不均匀系数 [δ]也不同。各种不同的机械对速度的波动有不同的要求,即根据设计要求规定不同的不均匀系数 δ的许用值。几种常见机械的不均匀系数的取值范围见表 14—1 。
二、机械运转的平均速度和不均匀系数若已知机械主轴角速度随时间变化的规律时,一个周期角速度的实现平均值 ω
m 为:ωm=(ωmin+ωmax)/2; δ=(ωmax-ωmin)/ωm
三、飞轮设计简介1.飞轮设计的基本原理飞轮的调速是利用它的储能作用,在机械系统出现盈功时,吸收储存多余能量,
而在出现亏功时释放其能量,以弥补能量的不足,从而使机械的角速度变化幅度得以缓减,即达到调节作用。
当机械系统的等效构件上装加一个转动惯量为 JF的飞轮之后,需飞轮储存的最大盈亏功为 ΔWmax = Emax - Emin,其等效构件的速度不均匀系数则为 δ =ΔWmax/( Je + JF)ωm2
由此可知,只要 JF 足够大,就可使 δ减少,则满足 δ≤[δ],即达到了调速的目的。飞轮转动惯量的近似计算:为了使机械系统满足的要求,需装加早期等效构件上的飞轮转动惯量为 JF的
计算公式为:JF≥ΔWmax/(ωm2[δ])- Je如果 Je<<JF, JF≥ΔWmax/(ωm2[δ])如果用平均转速 n(r/min) 计算,则 JF≥900ΔWmax/(n2π2[δ]) 。由此可知 ,
飞轮转动惯量的计算关键是最大盈亏功ΔWmax的确定。说明:在获得同样的调节效果的情况下,最好将飞轮安装在机械的高速轴上。
这样有利于减少飞轮的转动惯量。在设计时,还应考虑安装轴的刚性和结构上的可能性等。
本章小结 ( 1)机械的惯性载荷将严重影响机械工作的平稳性、影响机械的运动质量、降低机械零件的工作寿命,同时还将引起机械本身及周围环境的冲击和振动,甚至造成非常危险的后果。惯性载荷与速度有关,对于高速运转的机械来说,应十分重视惯性载荷问题。另外,造成构件的质心偏离回转中心的原因很多,如:几何形状、制造精度、安装误差、材质不均等。当测出不平衡量(质径积)和方位后,一般采用增减质量法进行平衡。但也有的机器其工作原理就是利用惯性载荷的。 ( 2)机械的速度波动是绝对的,普遍存在的,而速度恒定是相对的。不同的机械对速度稳定性的要求也是不同的。当机器对速度有控制要求时,应增加调速功能。调速的方法不外乎是通过改变驱动力所作的功或改变阻力所作的功来实现。