Embed Size (px)
DESCRIPTION
第二章 图象与视觉基础. 本章主要内容: • 采样和量化 • 图象的颜色模型 • 象素间联系 • 图像运算. 1. 采样和量化. ● 一幅图象必须在空间和灰度上都离散 化计算机才可以处理。 空间 采样 ― 空间坐标的离散化。 灰度 量化 -灰度的离散化。. △y. △x. 1.1 均匀采样和量化. 例如 : 只取交叉点象素的灰度值, 记为: f(x,y) ,构成图象文件→数字图象 若 Δx , Δy 不变-均匀采样。. 1.1 均匀采样和量化. ● 图象空间分辨率 N : M×N -采样。 - PowerPoint PPT Presentation
Citation preview

第二章 图象与视觉基础 本章主要内容: • 采样和量化 • 图象的颜色模型 • 象素间联系 • 图像运算

1. 采样和量化● 一幅图象必须在空间和灰度上都离散 化计算机才可以处理。 空间采样―空间坐标的离散化。 灰度量化-灰度的离散化。

1.1 均匀采样和量化
例如 : 只取交叉点象素的灰度值,记为: f(x,y) ,构成图象文件→数字图象 若 Δx , Δy 不变-均匀采样。
△y
△x

1.1 均匀采样和量化● 图象空间分辨率 N : M×N -采样。 图象 f(x,y) 中 0≤x≤M , 0≤y≤N● 图象密度分辨率 K :灰度级数 G -量化● 通常取 M=N ,且 M 、 N 、 G 均为 2 的n 次幂

1.2 非均匀采样● 若 M×N固定,改变 Δx, Δy 。比如:对人的脸 Δx, Δy取小,背景 Δx, Δy取大。
● 原则:在灰度变化大时用较密的采样。● 缺点:①要确定边缘。 ② 对含有较少均匀区域的图象也不使 用,例如人群照片。

1.3 非均匀量化●人眼在灰度变化剧烈区估计灰度的能力差。-较少的灰度级
●在灰度变化平缓区估计灰度的能力好。-较多的灰度级
●对边缘用较少的灰度级。

1.3 非均匀量化马赫带效应 (Mach band effect)

1.3 非均匀量化原因:
T
亮度感觉
实际
① 突变时有放大作用――警灯闪的原因② 视觉暂留

2. 图象的颜色模型 2.1 、视觉系统对颜色的感知 颜色是视觉系统对可见光的感知结果。
可见光是波长在 380nm-780nm 之间的电磁波。

2.1 视觉系统对颜色的感知

2.1 视觉系统对颜色的感知 ● 我们看到的大多数光不是一种波长的光,
而是由许多不同波长的光组合成的。人的视网膜有对红、绿、蓝颜色敏感程度不同的三种锥体细胞,另外还有一种在光功率极端低的条件下才起作用的杆状体细胞,杆状细胞主要提供视野的整体视象,对低照度较敏感。

2.1 视觉系统对颜色的感知 ● 红、绿和蓝三种锥体细胞对不同频率的光的感知程度不同,对不同亮度的感知程度也不同,如图 2.2 所示。

2.2 常用颜色模型 常用颜色模型分为两类:● 面向设备 如: CMY 、 RGB 、 YUV 、 YIQ 、 YCrCb ● 面向视觉系统 如: HSV 、 HIS 等

2.2.1 RGB相加混色模型 ●计算机显示器使用的阴极射线管 CRT
(cathode ray tube)是一个有源物体。CRT使用 3个电子枪分别产生红 (Red)、绿 (Green)和蓝 (Blue)三种波长的光,并以各种不同的相对强度综合起来产生颜色。

2.2.1 RGB相加混色模型

2.2.1 RGB相加混色模型 ●从理论上讲,任何一种颜色都可用三基色按不同的比例混合得到。它们的比例不同,我们看到的颜色也就不同。某一种颜色和这三种颜色之间的关系可用下面的式子来描述:
某一彩色= rR+ gG+ bB 其中 r,g,b 分别为 RGB 分量的份数

2.2.1 RGB相加混色模型●当三基色等量相加时,得到白色;●等量的红绿相加而蓝为 0值时得到黄色;●等量的红蓝相加而绿为 0时得到品红 (magent
a);●等量的绿蓝相加而红为 0时得到 青色 (cyan)。● 三基色相加的结果如图所示。

2.2.1 RGB相加混色模型●图象中的单个点称为象素 (pixel),每个象素都有一个值,称为象素值,它表示特定颜色的强度。一个象素值往往用 R、 G、 B三个分量表示。

2.2.1 RGB相加混色模型 RGB彩色空间也可以由图所示的立方体来表
示。

2.2.2 CMY相减混色模型 ●用彩色墨水或颜料进行混合,这样得到的颜色称为相减色。在理论上说,任何一种颜色都可以用三种基本颜料按一定比例混合得到。这三种颜色是青色(Cyan)、品红 (Magenta)和黄色 (Yellow),通常写成 CMY,称为 CMY模型。用这种方法产生的颜色之所以称为相减色,乃是因为它减少了为视觉系统
识别颜色所需要的反射光。

2.2.2 CMY相减混色模型在相加混色中:●白色- R= G+ B= C RC互补色。 (青色颜料吸收红光,显示青色)●白色- G= R+ B=M GM互补色。●白色- B= R+ G= Y BY 互补色

2.2.2 CMY相减混色模型 这些三基色相减结果如图所示
C + Y =白- R - B = GC + M + Y =白- R―G―B=黑

2.2.2 CMY相减混色模型●彩色打印机采用的就是这种原理,印刷彩色图片也是采用这种原理。由于彩色墨水和颜料的化学特性,用等量的三基色得到的黑色不是真正的黑色,因此在印刷术中常加一种真正的黑色 (black ink),所以 CMY又写成CMYK 。

2.2.2 CMY相减混色模型●相加色与相减色之间有一个直接关系,如下表所示。利用它们之间的关系,可以把显示的颜色转换成输出打印的颜色。相加混色和相减混色之间成对出现互补色。例如,当 RGB为 1∶1∶1时,在相加混色中产生白色,而 CMY为 1∶1∶1时,在相减混色中产生黑色。从另一个角度也可以看它们的互补性。从表中可以看到,在 RGB中的颜色为 1的地方,在CMY对应的位置上,其颜色值为 0。例如 RGB为 0∶1∶0时,对应 CMY为 1∶0∶1 。

2.2.2 CMY相减混色模型 相加混色 相减混色 生成的颜色
RGB CMY 000 111 黑 K001 110 蓝 B 010 101 绿 G011 100 青 C100 011 红 R101 010 品红 M110 001 黄 Y111 000 白 W

2.2.2 CMY相减混色模型 CMY彩色空间也可以使用图示的立方体来表
示。

2.2.3 YUV与 YIQ模型●在彩色电视制式中,使用 YUV和 YIQ模型来表示彩色图象。电视信号在发射时,转换成 YUV或 YIQ形式,接收时再还原成 RGB三基色信号,由显像管显示。
● YUV: Y表示亮度, UV用来表示色差, U、 V是构成彩色的两个分量; (PAL 制和 SECAM)
● YIQ:其中的 Y表示亮度, I、 Q 是两个彩色分量。(NTSC制 )

2.2.3 YUV与 YIQ模型●优点:(1)YUV表示法的重要性是它的亮度信号 (Y)和色度信号 (U、 V)是相互独立的,也就是 Y信号分量构成的黑白灰度图与用 U、 V信号构成的另外两幅单色图是相互独立的。由于 Y、 U、 V是独立的,所以可以对这些单色图分别进行编码。此外,黑白电视能接收彩色电视信号也就是利用了 YUV分量之间的
独立性。

2.2.3 YUV与 YIQ模型(2)可以利用人眼的特性来降低数字彩色图象所需要的存储容量。人眼对彩色细节的分辨能力远比对亮度细节的分辨能力低。若把人眼刚能分辨出的黑白相间的条纹换成不同颜色的彩色条纹,那末眼睛就不再能分辨出条纹来。由于这个原因,就可以把彩色分量的分辨率降低而不明显影响图象的质量,因而就可以把几个相邻象素不同的彩色值当作相同的彩
色值来处理,从而减少所需的存储容量。

2.2.3 YUV与 YIQ模型例如:要存储 RGB 8∶8∶8的彩色图象,即 R、 G和 B分量都用 8位二进制数表示,图象的大小为 640×480象素,那末所需要的存储容量为 640×480 ×3 = 921 600字节。如果用 YUV来表示同一幅彩色图象, Y分量仍然为 640×480,并且 Y 、 U 、 V分量仍然各用 8位表示,而对每四个相邻象素 (2×2)的 U、 V值分别用相同的一个值表示,那末存储同样的一幅图象所需的存储空间就减少到 640×480×1+ 640×480×2/4=460800字节。这实际上也是图象压缩技术的一种方法。

2.2.3 YUV与 YIQ模型● RGB和 YUV的对应关系可以近似地用下面的方程式表示:
Y = 0.299R + 0.587G + 0.114B U = - 0.147R - 0.289G + 0.436B V = 0.615R - 0.515G - 0.100B

2.2.3 YUV与 YIQ模型或者写成矩阵的形式:

2.2.3 YUV与 YIQ模型● RGB和 YIQ的对应关系用下面的方程式表示:
Y = 0.299R + 0.587G + 0.114B I = 0.596R - 0.275G - 0.321B Q = 0.212R - 0.523G + 0.311B

2.2.3 YUV与 YIQ模型或者写成矩阵的形式:

2.2.4 YCrCb模型●数字域中的彩色空间与模拟域的彩色空间 (Y
IQ 、 YUV)不同。它们的分量使用 Y、 Cr和Cb来表示,是 JPEG 数字图像标准和 MPEG数字视频标准。它是从 YUV系统衍生出来的。其中 Y还是指亮度, Cr和 Cb是将 U、 V作少量调整而得到的。适用于计算机用的显示器。

2.2.4 YCrCb模型它与 RGB空间的转换关系如下: Y= 0.299R+ 0.578G+ 0.114B Cr= (0.500R- 0.4187G- 0.0813B)+ 128 Cb=(-0.1687R- 0.3313G+ 0.500B)+ 128

2.2.4 YCrCb模型或者写成矩阵的形式:
或写成如下的形式 :

● 这个模型基于两个重要的事实:其一, I 分量与图象的彩色信息无关;其二, H 和 S 分量与人感受颜色的方式是紧密相连的。这种彩色系统格式的设计反映了人类观察彩色的方式。如:红色又分为浅红和深红色等等。
2.2.5 HSI模型

● I ( Intensity )-亮度。表示光照强度。它确定了像素的整体亮度,而不管其颜色是什么。通常用 0%(黑色)- 100%(白色)的百分比来度量。若 I从 0%- 100%,即从黑变到白。对任一个 I , R=G=B 。(灰度图)降低亮度时,颜色就暗,相当于掺入黑色。
2.2.5 HSI模型

● H ( Hue )-色调。反映了该颜色的光谱波长。在HIS 模型中由角度表示。 0o 为红色, 120o 为绿色,240o 为蓝色。 0 o 到 240o覆盖了所有可见光谱的颜色, 240o 到 300o 是人眼可见的非光谱色(紫色)。
2.2.5 HSI模型

● S ( Saturation )-饱和度。它反映的是纯色中加入白光的多少。饱和度参数是色环的原点到彩色点的半径长度。在环的外围圆周是纯的或称饱和的颜色,其饱和度值为 1 。在中心是中性(灰)影调,即饱和度为 0 。
2.2.5 HSI模型

2.2.5 HSI模型

1. RGB 到 HSI 的转换: )(
31 BGRI
BGRBGRS ),,min(31
BG
BGH
2
))(()(
)]()[(cos
221
1
BGBRGR
BRGR
2.2.5 HSI模型

2. HSI 到 RGB 的转换1 )]
)60cos()cos(1[
3 HHSR I
)1(3
SB I
BRIG 3
时当 1200 H
2.2.5 HSI模型

2. HSI 到 RGB 的转换2 )2.2.5 HSI模型
])180cos()120cos(1[
3 HHSG I
)1(3
SR I
GRIB 3
时当 240120 H

2. HSI 到 RGB 的转换3 )
2.2.5 HSI模型时当 300240 H
])300cos()240cos(1[
3 HHSB I
)1(3
SG I
BGIR 3

2.2.6 CIE 色度图●前已说明了几种选择三基色的方法,实用中要求三基色必须容易获得,且配出的颜色要尽可能多。为此国际照明委员会( CIE)规定红、绿、蓝三原色的波长分别为 700nm、546.1nm、 435.8nm。

2.2.6 CIE 色度图● 在颜色匹配实验中,当这三原色光的相对亮度比例 φ
R:φG:φB=1.0000: 4.5907: 0.0601时就能匹配出等能白光,所以 CIE选取这一比例作为红、绿、蓝三原色的单位量。即( R):( G):( B) =1: 1: 1 。
尽管这时三原色的亮度值并不等,但 CIE却把每一原色的亮度值作为一个单位看待,所以色光加色法中红、
绿、蓝三原色光等比例混合结果为白光,即 1( R)+1( G) +1( B) =白。
任一颜色可表示为: C=rR+gG+bB

2.2.6 CIE 色度图●这种物理三基色使用起来不便,用它计算各种彩色时,三色系数有时会出现负值(这是因为待配色为单色光,其饱和度很高,而三原色光混合后饱和度必然降低,无法和待配色实现匹配)。为此, CIE提出了一种虚拟的计算三基色——( XYZ )标准色度系统。

2.2.6 CIE 色度图●定义了虚拟的三基色 (X),(Y),(Z)。任一颜色可表示为:
C=X(X)+Y(Y)+Z(Z)(X)(Y)(Z)与 (R)(G)(B) 的转换关系为:
(X)(Y)(Z)
0.4185 -0.0912 0.0009-0.1587 0.2524 -0.0025-0.0828 0.0157 0.1786
(R)(G)(B)
=

2.2.6 CIE 色度图 用m=X+Y+Z来归一化:
x=X/m y=Y/m
z=Z/m 则: x+y+z=1

2.2.6 CIE 色度图●用 x,y,z画出相对色系数图称为: XYZ色度
图。由于 x+y+z=1 ,所以只要画出 x,y 坐标,z的坐标可以计算出来。

2.2.6 CIE 色度图●在色度图中: ①舌形图中每点对应一种可见颜色。 ②边界上的点为饱和色(纯色),非边界 上的点为非饱和色。

2.2.6 CIE 色度图作用:( 1 ) 测量任一种颜色的主波长和饱和度。
B
A
M N
λA = λB
A 色与 B 色的色调相同A 色的饱和度= AC/BC

2.2.6 CIE 色度图作用:( 2 ) 确定互补色 MN 互为互补色
B
A
M
N
对 N点的波长只能用互补色的波长来表示。

2.2.6 CIE 色度图作用:( 3 )确定若干种颜色能混合出的色域
色度图中任意两点的连线表示这两种颜色能混和出来的颜色。
CMY与 RGB色域不同。

3 象素间的联系
3.1 象素的邻域
对于坐标为( x,y)的象素 P,与它在水平与垂直方向上相邻的有四个象素,这些象素组成了( x,y)的 4- 邻域,记为 如图:
P
)(4 PN

3.1 象素的邻域●象素 P的 4 个对角近邻象素 与 P的 4-邻域象素一起,组成 P的 8 -邻域,记为 如图:
●如果( x,y)在图象的边缘,则其邻域象素中的一 些会落在图象外。
P
)(8 PN)(PND

3.2 象素的连接●要确定两个象素是否连接有两个条件:①两个象素是否接触(例如是否为 4-近邻象素);②灰度值是否满足特定的相似准则(如灰度相同)。
●用 V来定义连接的灰度集合。例如在一幅灰度图中,考虑灰度在 8- 16之间象素的连通性。则 V={ 8,9, 10, 11, 12, 13, 14, 15, 16 }

3.2 象素的连接定义:①4-连接: 2个象素 p和 r在 V中取值,且 r 在 中②8-连接: 2个象素 p和 r在 V中取值,且 r 在 中③m-连接: 2个象素 p和 r在 V中取值且满足下列条件之一:
a) r在 b) r ∩ 在 中,且 为空集
)(8 pN
)(4 pN
)(4 pN
)( pND )(4 pN )(4 rN

3.2 象素的连接例如 V={ 1,2}
0 1 1
0 2 0
0 0 1
它是一个 8 -连接,不是一个 4 -连接由于允许 8 -连接就产生了歧义性(即中心象素与右上角象素之间有两条连线)用 m-连接即可消除(斜线的 m-连接不成立)

3.2 象素的连接m -连接
0 1 1
0 2 0
0 0 1

3.3 连通性
● 设 p 和 q是 1个图象子集 S 中的两个象素,如果存在 1 条完全由在 S 中象素组成的从p 到 q的通路,那么称 p 在 S 中与q相连通。
● 对 S 中的任 1个象素 p ,所有与 p 相连通又在 S 中的象素的集合(包括 p )称为 S 的1个连接成分。

3.3 连通性
● “在二值图象连接成分的场合,若 1”象素用 8-连接 /4 “-连接,那么 0”象素必须用相反的 4-连接 /8-连接,否则会出错。
0 0 0 0 0
0 1 1 0 0
0 1 0 1 0
0 1 1 1 0
0 0 0 0 0
“1” 用 8 -连接,“ 0” 就必须用 4 -连接。否则被包围的“ 0” 象素就会与右上角的“ 0” 象素相连

3.3 连通性
● “在 0”的连接成分中,若存在和图象外围的 1行或 1 “列的 0”象素不相连的成分,则
“称为孔。包含孔的 1”的连接成分叫多重连“接成分。不包含孔的 1”的连接成分叫单连
接成分。

3.3 连通性
单连通成分
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 1 0 0 0 0 0 1 0 1 1 0 0 0 1 1 1 0 0 0 1 1 1 1 1 0 0 1 1 1 1 0 0 1 0 0 0 1 0 0 1 1 1 1 0 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
多连通成分
孔

3.3 连通性 上例中 E=1 欧拉数 E=连通成分数 C -孔数 C

3.4 象素间的距离● 给定三个象素 p 、 q、 r ,坐标分别为 (x,
y) , (s,t) , (u,v) ,则其距离度量函数应满足如下三个条件:
1 ) ( 当且仅当 p=q)2 ) 3 )
0), qpD( 0), qpD(
),(),( pqDqpD
),(),(),( rqDqpDrpD

3.4 象素间的距离① 点 p(x,y),q(s,t) 之间的欧式距离定义为:
根据这个距离度量,与( x,y )的距离小于或等于某个值 d 的象素都包括在以( x,y )为中心的以 d 为半径的园中。
2122),( tysxqpDE

21
2 1 0 1 212
3.4 象素间的距离5 5
5
5
55
2 2
2 25
5欧式距离

3.4 象素间的距离② D4 距离(城区距离):
根据这个距离度量,与( x,y )的 D4距离小于或等于某个值 d的象素组成以( x,y)为中心的菱形。
tysxqpD ),4(

3 2 33 2 1 2 32 1 0 1 23 2 1 2 3
3 2 3
3.4 象素间的距离
D4距离

3.4 象素间的距离③ D8 距离(棋盘距离):
根据这个距离度量,与( x,y)的距离小于或等于某个值 d的象素组成以( x,y)为中心的正方形。
),max(),8 tysxqpD (

2 2 2 2 22 1 1 1 22 1 0 1 22 1 1 1 22 2 2 2 2
3.4 象素间的距离
D8距离

4. 图像的运算4.1 算术和逻辑运算 算术运算一般用于灰度图象,两个象素 p 、 q间的算术运算有: 加法 记为 p+q
减法 记为 p-q乘法 记为 p*q(pq 或 p×q)除法 记为 P÷q

4.1 算术和逻辑运算●图象加法一般用于对同一场景的多幅图象求平均效果,以便有效地降低具有叠加性质的随机噪声。另外,给一幅图象的每一个象素加上一个常数,可以使图象的亮度增加。

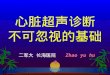
4.1 算术和逻辑运算●图象减法是医学成像中的基本工具之一,主要用来去除固定的背景信息,检测变化及运动物体。
(左图:背景 中图:前景 右图:变化区域 )

4.1 算术和逻辑运算●图象乘法主要用于校正由于照明或传感器非均匀造成的图象灰度阴影。例如给图象乘以一个常数k,若 k>1,可以增加图象的亮度,若 k<1,可以使图象变暗。因为这种操作能更好的维持图象的相关对比度,所以它可以产生比简单添加象素偏移量自然的多的明暗效果。也可以用来实现掩模 处理,即屏蔽掉图象的某些部分。

4.1 算术和逻辑运算● 除法运算可用于校正成像设备的非线性影响,在特殊形态的图象(如断层扫描等医学图象、遥感图象)处理中用到。也可以用来检测两幅图象间的区别,但是除法操作给出的是相应象素的比率,而不是绝对差异,所以也称为比率变换。

4.1 算术和逻辑运算逻辑运算:
与 AND p AND q 或 OR P OR q 非(补) NOT p逻辑运算只用于二值图象。

4.1 算术和逻辑运算●对图象进行算术与逻辑运算,实际上是对整幅图象逐象素进行。也可用于邻域运算。邻域处理主要以模板(样板、窗、
滤波器)运算的形式实现。

4.2 几何运算●二维几何变换:平移、旋转、比例、镜象变换,转置等
●与图形学中所讲的变换公式相同,但是有图象的特点。

4.2.1 平移 (translation) 平移变换是几何变换中最简单的一种。

4.2.1 平移 (translation)平移公式:
x1y11
1 0 tx0 1 ty0 0 1
x0y01
=

4.2.1 平移 (translation)●图形变换只需要知道坐标,而对图象不仅需要知道坐标,还需要知道平移后的图象中每个像素的颜色。例如我们想知道,新图中左上角点的 RGB值是多少?很显然,该点是原图中的某一点经过平移后得到的,这两点的颜色肯定是一样的,所以只要知道了原图那点的 RGB值即可。那么到底新图中的左上角点对应原图中的哪一点呢?

4.2.1 平移 (translation)用上述变换的逆变换:
x0y01
1 0 - tx0 1 - ty0 0 1
x1y11
=

4.2.1 平移 (translation)问题①:如果新图中有一点( x1,y1),按照公式 (2)得到的 (x0,y0)不在原图中该怎么办?通常的做法是,把该点的 RGB值统一设成 (0,0,0)或者 (255,255,255)。

4.2.1 平移 (translation)问题②:平移后的图象是否要放大?一种做法是不放大,
移出的部分被截断。这种处理,文件大小不会改变。左图为原图,右图为移动后的图。

4.2.1 平移 (translation) 还有一种做法是:将图象放大,使得能够显示下所有
部分。这种处理,文件大小要改变。

4.2.2 旋转 (rotation) 旋转有一个绕着什么转的问题,通常的做法是以图象的中心为圆心旋转。如左图旋转 30度(顺时针方向)后的图象如右 图所示:

4.2.2 旋转 (rotation) 可以看出,旋转后图象变大了。另一种做法是不让图象变大,转出的部分被裁剪掉。

4.2.2 旋转 (rotation) 在图形学中,将一个点顺时针旋转 a角后的坐标变换公式以矩阵的形式表示:
x1y11
cos(α) sin(α) 0-sin(α) cos(α) 0 0 0 1
x0y01
=

4.2.2 旋转 (rotation) 此公式中,坐标系 II是以图象的中心为原点,向右为 x轴正方向,向上为 y轴正方向。而屏幕上显示图象的坐标系 I以左上角点为原点,向右为 x轴正方向,向下为 y轴正方向。

4.2.2 旋转 (rotation)
x2y21
1 0 -0.5w0 -1 0.5h 0 0 1
x1y11
=
x1y11
1 0 0.5w0 -1 0.5h0 0 1
x2y21
=
它们之间的转换关系:设图象的宽为w,高为 h,容易得到
逆变换为

4.2.2 旋转 (rotation) ●有了上面的公式,我们可以把旋转变换分成 3步:①将坐标系 I变成 II;②将该点顺时针旋转 a角;③将坐标系 II变回 I。这样,我们就得到了变换矩阵,是上面三个矩阵的级联。

4.2.2 旋转 (rotation)
1 0 0.5Wnew
0 - 1 0.5Hnew
0 0 1
1 0 - 0.5Wold
0 - 1 0.5Hold0 0 1x1y11
x0y01
cos(α) sin(α) 0-sin(α) cos(α) 0 0 0 1
=
要注意的是,因为新图变大,所以公式中出现了Wold, Hold,Wnew, Hnew,表示原图和新图的宽高。我们从图中容易看出:Wnew=max(|x4-x1|,|x3-x2|); Hnew=max(|y4-y1|,|y3-y2|).

4.2.2 旋转 (rotation) 1 0 0.5Wold
0 - 1 0.5Hold
0 0 1
1 0 - 0.5Wnew
0 - 1 0.5Hnew0 0 1x0y01
x1y11
cos(α) -sin(α) 0sin(α) cos(α) 0 0 0 1
=
逆变换为:
对于新图中的每一点,我们就可以根据上式求出对应的原图中的点,得到它的灰度,如果超出原图范围,则填成白色。要注意的是,由于有浮点运算,计算出来点的坐标可能不是整数,简单的处理方法是采用取整处理,即找最接近的点,这样会带来一些误差(图象可能会出现锯齿)。

4.2.3 镜象 (mirror) ●镜象分水平镜象和垂直镜象两种:镜象的变换矩阵很简单,变换
后图像的宽和高不变。
原图

4.2.4 缩放( zoom )
1''
100
010
001
111001000
1''
yx
s
s
yx
yx
ss
yx
y
x
y
x

4.2.4 缩放( zoom ) 在图像旋转和缩放时会发生这样的情况:要确定新图象中某一点的灰度值,必须将坐标经过反变换后找到原图象对应点的坐标,进而找到对应的灰度值。如果求出的原图象对应点的坐标值不是一个整数值,就必须进行处理。

4.2.4 缩放( zoom )1)最近邻插值( Nearest Neighborhood Interpolation)
),()','(),),()','( intintintint yxIyxIyxyxyx oldnew 赋值取整逆变换
(
存在问题:有失真(放大时只重复复制,缩小时只是扔掉一些象素)

4.2.4 缩放( zoom )2)线性插值( Linear Interpolation)① 一维情况下: 已知 x1 、 x2 处灰度 g1 、 g2 、,求x3 处灰度 g3
11312
123 )( gxx
xxgg
g

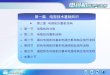
4.2.4 缩放( zoom )② 2D情况下:双线性插值:已知网格上 ABCD四点灰度,求P点灰度。

4.2.4 缩放( zoom )STEP1:在 Y方向线性插值。由:可得:
PQ yy
AAQAB
ABQ gyy
yygg
g
)(
?R
PR
gyy同理求出

4.2.4 缩放( zoom ),, AQCR xxxx
RRpQR
QRp gxx
xxgg
g
)(
STEP2:在 X 方向插值

4.2.4 缩放( zoom )3)曲线插值( curvilinear Interpolation) 线形插值是基于这样的假设,即原图的灰度在两个像素之间是线形变化的,一般情况下,这种插值的效果还不错。更精确的方法是采用曲线插值,即认为像素之间的灰度变化规律符合某种曲线,但这种处理的计算量是很大的。 “ ”关于插值,请参考 数值分析 方面的书。

作业 2.15