Embed Size (px)
DESCRIPTION
В данной методичке приводится методика расчета кинематического привода металлорежущих станков. Методичка будет полезна студентам для написания курсовых проектов и дипломных работ и избавит их от необходимости "перелопачивать" большое количество литературы.
Citation preview

1
1. Кинематический расчет привода
1.1 Выбор электродвигателя
1.1.1 Потребляемая мощность привода (мощность на выходе)
.410
5,010810 3
3
3 кВтFP tв =
⋅⋅=
⋅=
υ
1.1.2 Общий КПД привода
ηобщ = η2зуб. ⋅ ηоп. ⋅ η2
муфты,
где ηзуб. – КПД зубчатой передачи;
ηоп. – КПД опор приводного вала;
ηмуфты – КПД муфты.
ηмуфты = 0,98; ηзуб. = 0,97; ηоп. = 0,99;
ηобщ = 0,972 ⋅ 0,99 ⋅ 0,982 = 0,895.
1.1.3 Требуемая мощность электродвигателя
.47,4895,04
. кВтPPобщ
втрэ ===
η
1.1.4 Частота вращения приводного вала
ммSinzSin
pD звзв 3,261
)8180(
100)180(
=== , где −звp шаг цепи транспортера, z –
число зубьев звездочки,

2
144
544,363,26114,35,0106106 −=
⋅⋅⋅
=⋅
⋅⋅= мин
Dn
звв π
υ
1.1.5 Частота вращения вала электродвигателя
nэ.тр = nв ⋅ u,
где u = uбыстр ⋅ uтих;
Из табл.1.2[Глава 1](уч. П.Ф. Дунаев, О.П. Леликов) выбраны
передаточные отношения тихоходной и быстроходной передачи:
uтих = (2,5..5,6); uбыстр =3,15..5
nэ.тр = nв ⋅ uбыстр ⋅ uтих = 36,544 ⋅ (2,5..5,6)⋅ (3,15..5)= 287,8..1023,2
об/мин.
Исходя из мощности, ориентировочных значений частот
вращения, используя табл.24.9 (уч. П.Ф. Дунаев, О.П. Леликов) выбран
тип электродвигателя:
АИР 112МВ6/950 ( кВтP 4= 1950 −= минn )
1.2 Определение частот вращения и вращающих моментов на
валах
1.2.1 Уточнение передаточных чисел привода
26544,36
950===
вобщ n
nu - общее передаточное число привода.

3
T.к. в схеме привода отсутствует ременная и цепная передачи, то
передаточное число редуктора: 26== общред uu
Передаточные числа быстроходной и тихоходной ступеней по
соотношениям из табл.1.3 [Глава 1](уч. П.Ф. Дунаев, О.П. Леликов) равны:
487,42688,088,0 =⋅=⋅= редТ uu
795,5487,426
===Т
редБ u
uu
1.2.2 Определение частот вращения на валах привода
Частота вращения вала колеса тихоходной ступени
1
2 544,36 −== минnn вT
Частота вращения вала шестерни тихоходной ступени (вала колеса
быстроходной
ступени)
1
221 97,163487,4544,36)( −=⋅=⋅= минunnn TTБT
Частота вращения вала шестерни быстроходной ступени
1
21 21,950795,597,163 −=⋅=⋅= минunn БББ
1.2.3 Определение вращающих моментов на валах привода
Вращающий момент на приводном валу
мНDFT звtв ⋅=⋅⋅⋅⋅=⋅⋅⋅= −− 2,10453,261108102110
21 333

4
Вращающий момент на валу колеса тихоходной ступени редуктора
мНTTмуфтыоп
вT ⋅=
⋅=
⋅= 3,1077
98,099,02,1045
.2 ηη
Вращающий момент на валу шестерни тихоходной ступени (на валу
колеса быстроходной ступени) редуктора
мНu
TTTTзуб
TБT ⋅=
⋅=
⋅= 52,247
487,497,03,1077)(
.
221 η
Вращающий момент на валу шестерни быстроходной ступени
редуктора
мНu
TTБзуб
ББ ⋅=
⋅=
⋅= 03,44
795,597,052,247
.
12 η

5
2. Расчет зубчатых передач
2.1 Проектный расчет
2.1.1 Межосевое расстояние
Предварительное значение межосевого расстояния:
,/)1(' 31 uTuKa ⋅+⋅=ω
где 1T - вращающий момент на шестерне(наибольший из длительно
действующих),
u – передаточное число,
K – коэффициент, зависящий от поверхности твердости 1H и 2H зубьев
шестерни и колеса соответственно:
Твердость Н………. HBH 3501 ≤ HRCH 451 ≥ HRCH 451 ≥
HBH 3502 ≤ HBH 3502 ≤ HRCH 452 ≥
Коэффициент K……. 10 8 6
Окружная скорость:
( )1106'2
41
+⋅⋅⋅⋅⋅
=u
na ωπυ .
Уточнение предварительно найденного значения межосевого
расстояния:
( ) ,][
1 32
1
Hba
Ha u
TKuKaσφω ⋅⋅
⋅⋅+⋅=

6
где 3/1410МПаK a = - для косозубых колес,
baφ - коэффициент ширины.
Коэффициент нагрузки в расчетах на контактную прочность:
αβυ HHHH KKKK ⋅⋅= ,
где υHK - коэффициент, учитывающий внутреннюю динамику
нагружения,
βHK - коэффициент, учитывающий неравномерность распределения
нагрузки по длине контактных линий.
Коэффициент ωββ HHH KKK ⋅−+= )1(1 0 ,
где ωHK - коэффициент, учитывающий приработку зубьев. 0
βHK - коэффициент неравномерности распределения нагрузки в
начальный период приработки, он зависит от коэффициента bdφ .
Значение коэффициента )1(5,0/ 12 +⋅⋅== udb babd φφ .
Коэффициент ωαα HHH KKK ⋅−+= )1(1 0 ,
где 0αHK - коэффициент, учитывающий распределение нагрузки между
зубьями.
Значение коэффициента для косозубых передач )5(10 −⋅+= стH nAK α ,
где стn - степень точности,
А=0,15 для зубчатых колес с твердостью 1H и HBH 3502 ≥ ,
А=0,25 при 1H и HBH 3502 ≤ или HBH 3501 > и HBH 3502 ≤ .
2.1.2 Предварительные основные размеры колеса
Делительный диаметр: )1/(22 +⋅⋅= uuad ω .
Ширина: ωφ ab ba ⋅=2 .

7
2.1.3 Модуль передачи
Максимально допустимый модуль определяется из условия
неподрезания зубьев у основания:
)].1(17/[2max +⋅⋅≈ uam ω
Минимальное значение модуля определяют из условия прочности:
,][
)1(
2
1min
F
Fm
bauTKKm
σω ⋅⋅+⋅⋅⋅
=
где 3108,2 ⋅=mK - для косозубых передач.
Коэффициент нагрузки при расчете по напряжениям изгиба:
αβυ FFFF KKKK ⋅⋅= ,
где υFK - коэффициент, учитывающий внутреннюю динамику
нагружения,
βFK - коэффициент, учитывающий неравномерность распределения
напряжений у основания зубьев по ширине зубчатого венца: 082,018,0 ββ HF KK ⋅+= ,
αFK - коэффициент, учитывающий влияние погрешностей изготовления
шестерни и колеса на распределение нагрузки между зубьями, 0αα HF KK = .
2.1.4 Суммарное число зубьев и угол наклона
Минимальный угол наклона зубьев косозубых колес:
)/4arcsin( 2min bm=β .
Суммарное число зубьев: maz s /cos2 minβω ⋅⋅= .

8
Действительное значение угла наклона зуба: )]2/(arccos[ ωβ amz s ⋅⋅= ,
для косозубых колес °= 20...8β .
2.1.5 Число зубьев шестерни и колеса
Число зубьев шестерни: min11 )1/( zuzz s ≥+= ,
для косозубых колес .cos17 3min1 β⋅=z
Коэффициент смещения: 6,017/)17( 11 ≤−= zx , 12 xx = .
Число зубьев колеса: 12 zzz s += .
2.1.6 Фактическое передаточное число
12 / zzuф = .
2.1.7 Диаметры колес
Делительные диаметры:
шестерни…………………………………. ;cos/11 βmzd ⋅=
колеса……………………………………... .2 12 dad −⋅= ω
Диаметры окружностей вершин и впадин зубьев колес:
;)1(2 111 myxdd a ⋅−+⋅+=
;)25,1(2 111 mxdd f ⋅−⋅−=
;)1(2 222 myxdd a ⋅−+⋅+=
,)25,1(2 222 mxdd f ⋅−⋅−=
где 1x и 2x - коэффициенты смещения у шестерни и колеса,
maay /)( −−= ω - коэффициент воспринимаемого смещения,
)(5,0 12 zzma +⋅⋅= - делительное межосевое расстояние.

9
2.2 Проверочный расчет
2.2.1 Проверка зубьев колес по контактным напряжениям
Расчетное значение контактного напряжения
,][)1(
2
31
Hф
фHH ub
uTKaZ
σσω
ς ≤⋅
−⋅⋅⋅=
где 2/18400МПаZ =σ - для косозубых передач.
2.2.2 Силы в зацеплении
Окружная сила: ;/102 113 dTFt ⋅⋅=
радиальная сила: ;cos/ βαtgFF tr ⋅=
осевая сила: .βtgFF ta ⋅=
2.2.3 Проверка зубьев колес по напряжениям изгиба
Расчетное напряжение изгиба:
в зубьях колеса ;][ 222
2 FFStF
F YYYmbFK
σσ εβ ≤⋅⋅⋅⋅⋅
=
в зубьях шестерни ,][/ 12121 FFSFSFF YY σσσ ≤⋅=
где FSY - коэффициент, учитывающий форму зуба и концентрацию
напряжений, в зависимости от приведенного числа βυ3cos/zz = ,
βY - коэффициент, учитывающий угол наклона зуба в косозубой
передаче:
7,0100/1 ≥−= ββY ,
εY - коэффициент, учитывающий перекрытие зубьев, для косозубых
передач 65,0=εY .

10
2.2.4 Проверочный расчет на прочность зубьев при действии
пиковой нагрузки
Коэффициент перегрузки:
TTK перпер /= ,
где перT - пиковый момент,
max1 TTT == - максимальный из длительно действующих (номинальный)
момент.
Для предотвращения остаточных деформаций или хрупкого
разрушения поверхностного слоя контактное напряжение maxHσ не должно
превышать допускаемое напряжение max][ Hσ :
maxmax ][ HперHH K σσσ ≤⋅= ,
где Hσ - контактное напряжение при действии номинального момента
Т.
Допускаемое напряжение max][ Hσ принимают при:
улучшении или сквозной закалке….…. ТH σσ ⋅= 8,2][ max ;
цементации или контурной ТВЧ……... срH HRC44][ max =σ ;
азотировании…………………………... МПаHRCсрH 200035][ max ≤≈σ .
Для предотвращения остаточных деформаций и хрупкого разрушения
зубьев напряжение maxFσ изгиба при действии пикового момента не должно
превышать допускаемое max][ Fσ :
maxmax ][ FперFF K σσσ ≤⋅= ,

11
где Fσ - напряжение изгиба, вычисленное при расчетах на
сопротивление усталости.
Допускаемое напряжение вычисляется в зависимости от вида
термической обработки и возможной частоты приложения пиковой нагрузки:
ststNFF SkY /][ maxlimmax ⋅⋅= σσ ,
где limFσ - предел выносливости при изгибе,
maxNY - максимально возможное значение коэффициента долговечности
( 4max =NY для сталей с объемной термообработкой: нормализация,
улучшение, объемная закалка; 5,2max =NY для сталей с поверхностной
обработкой: закалка ТВЧ, цементация, азотирование),
stk - коэффициент влияния частоты приложения пиковой нагрузки (в
случае единичных перегрузок 3,1...2,1=stk - большие значения для объемной
термообработки; при многократном )10(~ 3 действие перегрузок 1=stk ),
stS - коэффициент запаса прочности (обычно 75,1=stS ).
2.3 Анализ результатов расчета на ЭВМ
Расчет зубчатых передач на ЭВМ проводился в 2 этапа.
По результатам первого этапа расчета зубчатых передач на ЭВМ были
построены графики (см. приложение), отражающие распределение общего
передаточного редu числа между быстроходной Бu и тихоходной Тu
ступенями редуктора )( ТБред uuu ⋅= , а также способа термообработки
зубчатых колес на основные качественные показатели: массу кm зубчатых
колес, массу редm редуктора, суммарное межосевое расстояние
wTwБwc aaa += , диаметр 1fd впадин зубьев быстроходной шестерни,
диаметры Бad 2 и Таd 2 вершин зубьев колес быстроходной и тихоходной

12
ступеней.
Поиск варианта с наименьшей массой привода предусматривал
выполнение следующих конструктивных ограничений:
• диаметр 1fd шестерни быстроходной ступени удовлетворял
условию
3
1 25,1 Бf ТКd ⋅⋅≥ ,
где 7=К , мНТБ ⋅= 03,44 - вращающий момент на валу.
3
1 03,44725,1 ⋅⋅≥fd , .9,301 ммd f ≥
• при смазывании зацеплений погружением в масляную ванну
зубчатых колес обеих ступеней разность )(5,0 22 БaTa ddR −=∆ наименьшая при
выполнении условия .25,0 2TadR ⋅≤∆
Был выбран вариант № 5, на основании чего был проведен второй этап
расчета зубчатых передач на ЭВМ и получены все расчетные параметры,
требуемые для выпуска чертежей, а также силы в зацеплении, необходимые
для расчета и выбора подшипников.

13
3. Эскизное проектирование
3.1 Проектные расчеты валов
Крутящий момент в поперечных сечениях валов
Быстроходного TБ= 43,1 H⋅м
Промежуточного Tпр= 222,5 H⋅м
Тихоходного TT= 1077,3 H⋅м
Предварительные значения диаметров различных участков стальных
валов редуктора:
Для быстроходного:
ммfммrммtммТd
цил
Б
1;2;5,32628..5,251,43)8..7()8..7( 33
===⇒
⇒≅=⋅=⋅≥
ммtdd цилп 35/34335,32262 ≅=⋅+=+≥
ммrdd пБп 404023343 ≅=⋅+=+≥
Для промежуточного:
ммfммrммt
ммТd
цил
прк
2,1;5,2;5,3
404,42..4,365,222)7..6()7...6( 33
===⇒
⇒≅=⋅=⋅≥
ммfdd кБк 47/456,432,13403 ≅=⋅+=+≥
ммrdd кп 305,325,23403 ≅=⋅−=−≥
ммrdd пбп 35/34355,23303 ≅=⋅+=+≥
Для тихоходного:
ммfммrммtммТd
цил
т
2;3;5,455/535,61..3,513,1077)6..5()6...5( 33
===⇒
⇒≅=⋅=⋅≥

14
ммtdd цилп 65/63625,42532 ≅=⋅+=+≥
ммrdd пБп 72/717233633 ≅=⋅+=+≥ .
Зазор 33 +≈ La ,
где
ммddaaL БaTawБwT 475,473644,425,0306,3045,01201805,05,0 12 =⋅+⋅++=⋅+⋅++=
.113475,4733 ммa ≈+≈
Расстояние 0b между дном корпуса и поверхностью колес ab ⋅≥ 30 , т.е.
.330 ммb ≥
Расстояние между торцевыми поверхностями колес
,5,5..3,311)5,0..3,0()5,0..3,0( ммaс =⋅=⋅= принимаем .5,5 ммс =
3.2 Выбор типа и схемы установки подшипников
Выбираем роликовые конические радиально-упорные однорядные
подшипники повышенной грузоподъемности легкой серии:
для быстроходного вала: Подшипник 206 ГОСТ 8338-75;
для промежуточного: Подшипник 206 ГОСТ 8338-75;
для тихоходного: Подшипник 212 ГОСТ 8338-75;
Схема установки подшипников «враспор».

15
4. Конструирование зубчатых колес
4.1 Параметры зубчатого колеса быстроходной ступени
Материал колеса Сталь 40Х (твердость поверхности зубьев 285НВ).
Из проектного расчета: ширина зубчатого венца ммb 382 = ;
модуль зацепления (нормальный) ммm 0,2= ;
Диаметр посадочного отверстия ммd 40= .
Длина ступицы колеса ммdlст 4848..4040)2,1..0,1()2,1..0,1( ≅=⋅=⋅= .
Диаметр ступицы ммddст 6262..6040)55,1..5,1()55,1..5,1( ≅=⋅=⋅= .
Ширина торцов зубчатого венца
ммbmS 3,638005,022,205,02,2 2 =⋅+⋅=⋅+⋅= .
Фаски на торцах зубчатого венца
ммmf 2,12,1..10,2)6,0..5,0()6,0..5,0( ≅=⋅=⋅= ,
выполняют фаски под углом o45=фα
Толщина диска 225,0)(5,0 bSSC ст ⋅≥+⋅≈ , где )(5,0 ddS стст −⋅=
ммSст 11)4062(5,0 =−⋅=
ммммС 5,93825,065,8)113,6(5,0 =⋅≥=+⋅≈ принимаем ммС 5,9= .
Для свободной выемки из штампа принимаем значение штамповочных
уклонов o7=γ и радиусов закруглений ммR 6= .
4.2 Параметры зубчатого колеса тихоходной ступени
Материал колеса Сталь 40Х (твердость поверхности зубьев 285НВ).
Из проектного расчета: ширина зубчатого венца ммb 572 = ;

16
модуль зацепления (нормальный) ммm 5,3= ;
Диаметр посадочного отверстия ммd 71= .
Длина ступицы колеса ммdlст 852,85..7171)2,1..0,1()2,1..0,1( ≅=⋅=⋅= .
Диаметр ступицы ммddст 11005,110..5,10671)55,1..5,1()55,1..5,1( ≅=⋅=⋅= .
Ширина торцов зубчатого венца
ммbmS 5,1057005,05,32,205,02,2 2 =⋅+⋅=⋅+⋅= .
Фаски на торцах зубчатого венца
ммmf 21,2..75,15,3)6,0..5,0()6,0..5,0( ≅=⋅=⋅= ,
выполняют фаски под углом o45=фα
Толщина диска 225,0)(5,0 bSSC ст ⋅≥+⋅≈ , где )(5,0 ddS стст −⋅=
ммSст 5,19)71110(5,0 =−⋅=
ммммС 25,145725,015)5,195,10(5,0 =⋅≥=+⋅≈ принимаем ммС 15= .
Для свободной выемки из штампа принимаем значение штамповочных
уклонов o7=γ и радиусов закруглений ммR 6= .

17
5. Расчет соединений
5.1 Соединения с натягом
5.1.1 Соединение зубчатое колесо быстроходной ступени - вал.
Материал вала - Сталь 45.
Вращающий момент с колеса на вал будет передаваться с помощью
соединения с натягом.
Подбор посадки с натягом.
Исходные данные:
ü вращающий момент на колесе - мНTБ ⋅= 5,222 ;
ü диаметр соединения - ммd 40= , т.к. вал сплошной, то 01 =d ;
ü условный наружный диаметр ступицы колеса - ммd 622 = ;
ü длина сопряжения - ммl 48= ;
1.) Среднее контактное давление
fldTKp
⋅⋅⋅⋅⋅⋅
= 2
3102π
,
где K – коэффициент запаса сцепления, в нашем случае на конце
выходного вала установлена муфта 5,4=K ;
f – коэффициент сцепления (трения), при сборке запрессовкой и для
материалов пары сталь-сталь 08,0=f ;
⇒ МПаp 8308,0604014,35,2225,4102
2
3
=⋅⋅⋅
⋅⋅⋅= ;
2.) Деформация деталей

18
+⋅⋅⋅=
2
2
1
1310EC
ECdpδ ,
где −21,CC коэффициенты жесткости:
1
21
21
1 11 µ−
−
+=
dd
ddC ;
1
2
2
2
22 11 µ+
−
+=
dd
ddC ;
21, EE – модули упругости, для стали МПаE 5101,2 ⋅= ;
−21,µµ коэффициенты Пуассона, для стали 3,0=µ
7,03,04001
4001
22
1 =−
−
+=C ;
726,23,062401
62401
22
1 =+
−
+=C ;
⇒ мкм463,54101,2
726,2101,27,0408310 55
3 =
⋅
+⋅
⋅⋅⋅=δ .
3.) Поправка на обмятие микронеровностей
)(5,5 21 RaRau +⋅= ,
где −21, RaRa средние арифметические отклонения профиля
поверхностей, из
табл.22.2(уч. П.Ф. Дунаев, О.П. Леликов): мкмRaмкмRa 6,1,8,0 21 == ;
⇒ мкмu 2,13)6,18,0(5,5 =+⋅= .

19
4.) Поправка на температурную деформацию
( ) ( )[ ]11223 202010 ααδ ⋅−−⋅−⋅⋅= oo ttdt ,
где −21,tt средняя объемная температура соответственно обода центра и
венца колеса, в
нашем случае 21 tt = ;
−α температурный коэффициент, для стали 61012 −⋅=α Co/1 ;
⇒ ( )[ ] мкмttt 010127110 1263 =−⋅⋅⋅⋅= −δ .
5.) Минимальный натяг
мкмuN t 363,6702,13163,54][ min =++=++= δδ .
6.) Максимальный натяг
uN += maxmax ][][ δ .
Здесь −⋅
=p
p δδ max
max][][ максимальная деформация, где
−max][ p максимальное давление,
допускаемое прочностью колеса или вала, меньшее из двух:
−⋅=
2
222max 15,0][
ddp Тσ или 11max][ Tp σ=
(для сплошного вала ( 01 =d )),

20
Здесь −12 , TT σσ предел текучести колеса и вала, в нашем случае
МПаT 4401 =σ ,
МПаТ 5902 =σ ;
⇒ МПаp 440][ 1max = ,
МПаp 211,172624015905,0][
2
2max =
−⋅⋅= ,
⇒ МПаpp 440][][ 1maxmax == , мкм379,11283
163,54211,172][ max =⋅
=δ ,
мкмN 579,1252,13379,112][ max =+= .
7.) Выбор посадки.
По значениям min][N и max][N выбираем из табл.6.3[Глава 6](уч. П.Ф.
Дунаев, О.П.
Леликов) посадку, удовлетворяющую условиям
maxmaxminmin ][;][ NNNN ≤≥ – 12569
88
=xH .
8.) Сила запрессовки
пп fpldF ⋅⋅⋅⋅= maxπ ,
где ( ) ( ) МПаpuNp 32,171163,54832,13125maxmax =⋅−=⋅−= δ – давление от
натяга maxN
выбранной посадки;
−пf коэффициент сцепления (терния) при запрессовке, в нашем случае
для материалов пары сталь-сталь 20,0=пf ;
⇒ НFп 58,20667520,032,171484014,3 =⋅⋅⋅⋅= .

21
9.) Температура нагрева охватывающей детали
23
max
10)(20
α⋅⋅+
+=d
ZNt сбo ,
где −сбZ зазор, в зависимости от диаметра ммd 40= мкмZсб 10= ,
⇒ Ct oo 25,30110124010
1012520 63 =⋅⋅⋅
++= − .
Чтобы не происходило структурных изменений в материале
необходимо чтобы ][tt ≤ , для стали Ct o240..230][ = .
В нашем случает ][tt > ⇒ натяг для соединения зубчатого колеса
быстроходной ступени и вала не подходит, поэтому используем для передачи
вращающего момента призматическую шпонку.
5.1.2 Соединение зубчатое колесо тихоходной ступени - вал
Материал вала - Сталь 45.
Вращающий момент с колеса на вал будет передаваться с помощью
соединения с натягом.
Подбор посадки с натягом.
Исходные данные:
ü вращающий момент на колесе - мНTБ ⋅= 3,1077 ;
ü диаметр соединения - ммd 71= , т.к. вал сплошной, то 01 =d ;
ü условный наружный диаметр ступицы колеса - ммd 1102 = ;
ü длина сопряжения - ммl 85= ;
10.) Среднее контактное давление

22
fldTKp
⋅⋅⋅⋅⋅⋅
= 2
3102π
,
где K – коэффициент запаса сцепления, в нашем случае на конце
выходного вала установлена муфта 3=K ;
f – коэффициент сцепления (трения), при сборке запрессовкой и для
материалов пары сталь-сталь 08,0=f ;
⇒ МПаp 6008,0857114,33,10773102
2
3
=⋅⋅⋅
⋅⋅⋅= ;
11.) Деформация деталей
+⋅⋅⋅=
2
2
1
1310EC
ECdpδ ,
где −21,CC коэффициенты жесткости:
1
21
21
1 11 µ−
−
+=
dd
ddC ;
1
2
2
2
22 11 µ+
−
+=
dd
ddC ;
21, EE – модули упругости, для стали МПаE 5101,2 ⋅= ;
−21,µµ коэффициенты Пуассона, для стали 3,0=µ
7,03,07101
7101
22
1 =−
−
+=C ;
728,23,0110711
110711
22
1 =+
−
+=C ;
⇒ мкм54,69101,2
728,2101,27,0716010 55
3 =
⋅
+⋅
⋅⋅⋅=δ .

23
12.) Поправка на обмятие микронеровностей
)(5,5 21 RaRau +⋅= ,
где −21, RaRa средние арифметические отклонения профиля
поверхностей, из
табл.22.2(уч. П.Ф. Дунаев, О.П. Леликов): мкмRaмкмRa 6,1,8,0 21 == ;
⇒ мкмu 2,13)6,18,0(5,5 =+⋅= .
13.) Поправка на температурную деформацию
( ) ( )[ ]11223 202010 ααδ ⋅−−⋅−⋅⋅= oo ttdt ,
где −21,tt средняя объемная температура соответственно обода центра и
венца колеса, в
нашем случае 21 tt = ;
−α температурный коэффициент, для стали 61012 −⋅=α Co/1 ;
⇒ ( )[ ] мкмttt 010127110 1263 =−⋅⋅⋅⋅= −δ .
14.) Минимальный натяг
мкмuN t 74,8202,1354,69][ min =++=++= δδ .
15.) Максимальный натяг
uN += maxmax ][][ δ .
Здесь −⋅
=p
p δδ max
max][][ максимальная деформация, где
−max][ p максимальное давление, допускаемое прочностью колеса или вала,
меньшее из двух:

24
−⋅=
2
222max 15,0][
ddp Тσ или 11max][ Tp σ= (для сплошного вала ( 01 =d )),
Здесь −12 , TT σσ предел текучести колеса и вала, в нашем случае
МПаT 4401 =σ ,
МПаТ 5102 =σ ;
⇒ МПаp 440][ 1max = ,
МПаp 764,1481107115105,0][
2
2max =
−⋅⋅= ,
⇒ МПаpp 440][][ 1maxmax == , мкм42,17260
54,69764,148][ max =⋅
=δ ,
мкмN 62,1852,1342,172][ max =+= .
16.) Выбор посадки.
По значениям min][N и max][N выбираем из табл.6.3[Глава 6](уч. П.Ф.
Дунаев, О.П. Леликов) посадку, удовлетворяющую условиям
maxmaxminmin ][;][ NNNN ≤≥ – 178114
88
=xH .
17.) Сила запрессовки
пп fpldF ⋅⋅⋅⋅= maxπ ,
где ( ) ( ) МПаpuNp 192,14254,69602,13178maxmax =⋅−=⋅−= δ – давление от
натяга maxN выбранной посадки;
−пf коэффициент сцепления (терния) при запрессовке, в нашем случае
для материалов пары сталь-сталь 20,0=пf ;

25
⇒ НFп 45,53917620,0192,142857114,3 =⋅⋅⋅⋅= .
18.) Температура нагрева охватывающей детали
23
max
10)(20
α⋅⋅+
+=d
ZNt сбo ,
где −сбZ зазор, в зависимости от диаметра ммd 71= мкмZсб 10= ,
⇒ Ct oo 24010127110
1017820 63 =⋅⋅⋅
++= − .
Чтобы не происходило структурных изменений в материале
необходимо чтобы ][tt ≤ , для
стали Ct o240..230][ = .
5.2 Шпоночный соединения
5.2.1 Соединение зубчатое колесо быстроходной ступени - вал
Материал вала - Сталь 45.
Вращающий момент с колеса на вал будет передаваться с помощью
призматической шпонки 40812 ×× ГОСТ23360-78, колесо и вал соединяются
посадкой с натягом Н7/r6.
Линейные размеры шпонки:
ммtммtммsммlммhммb p 3,3;5;6,04,0;32;8;12 21 ==−====
Напряжение смятия на боковых рабочих гранях шпонки или паза в
ступице и на валу:

26
kldT
p
прсм ⋅⋅
⋅⋅=
3102σ ,
где ммhk 2,384,04,0 =⋅=⋅≈ - глубина врезания шпонки в ступицу;
мНTпр ⋅= 5,222 - вращающий момент на промежуточном валу.
МПасм 914,862,34040
105,2222 3
=⋅⋅⋅⋅
=σ .
Условие прочности:
смp
пр
kldT
][102 3
σ≤⋅⋅
⋅⋅,
где SТ
смσ
σ =][ - допускаемое напряжение смятия;
ммd 40= – посадочный диаметр;
МПаT 350=σ - предел текучести;
5,3..9,2=S - коэффициент запаса при частых пусках и остановках;
.69,120..1005,3..9,2
350][ МПасм ==σ
смсм ][σσ ≤ ⇒ условие прочности выполняется.
5.2.2 Соединение вал-шестерня быстроходной ступени – полумуфта
Материал вала - Сталь 45.
Вращающий момент с колеса на вал будет передаваться с помощью
призматической шпонки 3278 ×× ГОСТ23360-78, вал и полумуфта
соединяются посадкой с натягом Н7/k6.

27
Линейные размеры шпонки:
ммtммtммsммlммhммb p 3,3;4;4,025,0;32;7;8 21 ==−====
Напряжение смятия на боковых рабочих гранях шпонки или паза в
ступице и на валу:
kldT
p
Бсм ⋅⋅
⋅⋅=
3102σ ,
где ммhk 8,274,04,0 =⋅=⋅≈ - глубина врезания шпонки в ступицу;
мНTБ ⋅= 1,43 - вращающий момент на быстроходном валу.
МПасм 378,23226
101,432 3
=⋅⋅⋅⋅
=σ .
Условие прочности:
смp
Б
kldT
][102 3
σ≤⋅⋅
⋅⋅ ,
где SТ
смσ
σ =][ - допускаемое напряжение смятия;
ммd 26= – посадочный диаметр;
МПаT 350=σ - предел текучести;
5,3..9,2=S - коэффициент запаса при частых пусках и остановках;
МПасм 69,120..1005,3..9,2
350][ ==σ .
смсм ][σσ ≤ ⇒ условие прочности выполняется.

28
5.2.3 Соединение вал тихоходной ступени – полумуфта Материал вала - Сталь 45. Вращающий момент с колеса на вал будет передаваться с помощью
призматической шпонки 701016 ×× ГОСТ23360-78, вал и полумуфта
соединяются посадкой с натягом Н7/k6. Линейные размеры шпонки:
ммtммtммsммlммhммb p 3,4;6;6,04,0;70;10;16 21 ==−====
Напряжение смятия на боковых рабочих гранях шпонки или паза в ступице и на валу:
kldT
p
Тсм ⋅⋅
⋅⋅=
3102σ ,
где ммhk 4104,04,0 =⋅=⋅≈ - глубина врезания шпонки в ступицу;
мНTТ ⋅= 3,1077 - вращающий момент на тихоходном валу.
МПасм 98,14747052103,10772 3
=⋅⋅⋅⋅
=σ .
Условие прочности:
смp
Б
kldT
][102 3
σ≤⋅⋅
⋅⋅ ,
где SТ
смσ
σ =][ - допускаемое напряжение смятия;
ммd 52= – посадочный диаметр;
МПаT 350=σ - предел текучести;
5,3..9,2=S - коэффициент запаса при частых пусках и остановках;

29
МПасм 69,120..1005,3..9,2
350][ ==σ .
Условие прочности не выполняется ⇒ призматическая шпонка для
соединения вала тихоходной ступени и полумуфты не подходит, поэтому
используем для передачи вращающего момента соединение прямобочными
шлицами.
5.2.4 Соединение тяговая звездочка – приводной вал
Материал вала - Сталь 45.
Вращающий момент с колеса на вал будет передаваться с помощью
призматической шпонки 701220 ×× ГОСТ23360-78, вал и полумуфта
соединяются посадкой с натягом Н7/k6.
Линейные размеры шпонки:
ммtммtммsммlммhммb p 9,4;5,7;8,06,0;70;12;20 21 ==−====
Напряжение смятия на боковых рабочих гранях шпонки или паза в
ступице и на валу:
kldT
pсм ⋅⋅
⋅⋅=
3max 102
σ ,
где ммhk 8,4124,04,0 =⋅=⋅≈ - глубина врезания шпонки в ступицу;
мНd
FT дt ⋅=
⋅⋅⋅⋅⋅=⋅⋅⋅=
−
72,13792
1031,2611042,22,12
2,22,13
3max -
максимальный вращающий момент на приводном валу.

30
МПасм 98,1108,470741072,13792 3
=⋅⋅
⋅⋅=σ .
Условие прочности:
смp kld
T][
102 3max σ≤
⋅⋅⋅⋅ ,
где SТ
смσ
σ =][ - допускаемое напряжение смятия;
ммd 74= – посадочный диаметр;
МПаT 350=σ - предел текучести;
5,3..9,2=S - коэффициент запаса при частых пусках и остановках;
МПасм 69,120..1005,3..9,2
350][ ==σ .
смсм ][σσ ≤ ⇒ условие прочности выполняется.
5.3 Шлицевые соединения
5.3.1 Соединение Вал тихоходной ступени – полумуфта
Материал вала - Сталь 45.
Вращающий момент с колеса на вал будет передаваться с помощью
соединения прямобочными шлицами 9D9/f8 54 46H7/f7 8-d ××× ГОСТ1139-80 с
центрированием по внутреннему диаметру d.
Линейные размеры шлицев:
Средняя серия; .5,0;9;8;54;46 ммfммbzммDммd =====
Напряжение смятия на боковых рабочих гранях шлицев в ступице и на
валу:

31
hzldkT
ср
рнТсм ⋅⋅⋅
⋅⋅⋅=
3102σ ,
где 5,1..1,1=рнk - коэффициент, учитывающий неравномерность
распределения нагрузки между парами шлицев из-за ошибок изготовления по
шагу, принимаем 3,1=рнk ;
мНTТ ⋅= 3,1077 - вращающий момент на валу;
ммdDdср 502
46542
=+
=+
= - средний диаметр соединения;
ммdDh 42
46542
=−
=−
= - рабочая высота шлицев;
ммl 82= - длина соединения.
МПасм 35,21488250
3,1103,10772 3
=⋅⋅⋅
⋅⋅⋅=σ .
Условие прочности:
смср
рнТ
hzldkT
][102 3
σ≤⋅⋅⋅
⋅⋅⋅,
где SТ
смσ
σ =][ - допускаемое напряжение смятия;
МПаT 350=σ - предел текучести;
5,3..9,2=S - коэффициент запаса при частых пусках и остановках;
МПасм 69,120..1005,3..9,2
350][ ==σ .

32
смсм ][σσ ≤ ⇒ условие прочности выполняется.
5.3.2 Соединение приводной вал - полумуфта
Материал вала - Сталь 45.
Вращающий момент с колеса на вал будет передаваться с помощью
соединения прямобочными шлицами 9D9/f8 54 46H7/f7 8-d ××× ГОСТ1139-80 с
центрированием по внутреннему диаметру d.
Линейные размеры шлицев:
Средняя серия; .5,0;9;8;54;46 ммfммbzммDммd =====
Напряжение смятия на боковых рабочих гранях шлицев в ступице и на
валу:
hzldkT
ср
рнсм ⋅⋅⋅
⋅⋅⋅=
3max 102
σ ,
где 5,1..1,1=рнk - коэффициент, учитывающий неравномерность
распределения нагрузки между парами шлицев из-за ошибок изготовления по
шагу, принимаем 3,1=рнk ;
мНd
FT дt ⋅=
⋅⋅⋅⋅⋅=⋅⋅⋅=
−
72,13792
1031,2611042,22,12
2,22,13
3max -
максимальный момент на приводном валу;
ммdDdср 502
46542
=+
=+
= - средний диаметр соединения;
ммdDh 42
46542
=−
=−
= - рабочая высота шлицев;
ммl 82= - длина соединения.
МПасм 34,27488250
3,11072,13792 3
=⋅⋅⋅
⋅⋅⋅=σ .

33
Условие прочности:
смср
рн
hzldkT
][102 3
max σ≤⋅⋅⋅
⋅⋅⋅,
где SТ
смσ
σ =][ - допускаемое напряжение смятия;
МПаT 350=σ - предел текучести;
5,3..9,2=S - коэффициент запаса при частых пусках и остановках;
МПасм 69,120..1005,3..9,2
350][ ==σ .
смсм ][σσ ≤ ⇒ условие прочности выполняется.

34
6. Расчет подшипников
При расчете подшипников силы, действующие в зацеплении, взяты из
результатов второго этапа проектного расчета зубчатых передач на ЭВМ.
6.1 Расчет подшипников на быстроходном валу
Исходные данные:
ü частота вращения вала - 1950 −= минn ;
ü делительный диаметр шестерни быстроходной ступени -
ммd 644,381 = ;
ü осевая сила, действующая на шестерню - НFa 6,408= ;
ü радиальная сила, действующая на шестерню - НFr 9,817= ;
ü окружная сила, действующая на шестерню - НFt 8,2209= ;
ü расстояние между торцами для наружных колец подшипников -
ммlп 167= ;
ü линейные размеры - ммl 481 = , ммl 752 = ;
ü параметры выбранного подшипника:
Подшипник 206 ГОСТ 8338-75
Размеры: ммd 30= Грузоподъемность: кНCr 5,19=
ммD 62= кНC r 0,100 =
ммB 16= ммr 5,1=
ммDw 525,9=
°= 0α

35
6.1.1 Радиальные реакции опор
Расстояние между точками приложения радиальных реакций при
установке радиально-упорных подшипников по схеме «враспор»:
all п ⋅−= 2 ,
где a - смещение точки приложения радиальной реакции от торца
подшипника, для шариковых радиальных однорядных подшипников:
ммBa 82/162/ === ,
⇒ ммl 15182167 =⋅−= .
6.1.1.1 От сил в зацеплении
Ø в плоскости YOZ:
l 1
l n
l
F k
l 2
R 1 B
R 1 r F r R 2 r
F a
F t
R 2 B
d 1
2

36
∑ = 01М ; 02
112 =⋅+⋅+⋅
dFlFlR arB ;
НdFlFl
R arB 28,3122644,386,408489,817
1511
21 1
12 −=
⋅+⋅⋅−=
⋅+⋅⋅−= .
∑ = 02М ; 02
)( 111 =⋅+−⋅−⋅−
dFllFlR arB ;
.62,5052644,386,408)48151(9,817
1511
2)(1 1
11 НdFllFl
R arB −=
⋅−−⋅⋅−=
⋅−−⋅⋅−=
Проверка:
09,81728,31262,50521 =+−−=++=∑ rBB FRRY -
реакции найдены правильно.
Ø в плоскости XOZ:
∑ = 01М ; 012 =⋅+⋅ lFlR tГ ;
Нl
lFR tГ 45,702
151488,22091
2 −=⋅
−=⋅
−= .
∑ = 02М ; 0)( 11 =−⋅+⋅ llFlR tГ ;
( ) ( ) .35,1507151
481518,220911 Н
lllFR t
Г −=−⋅
−=−⋅
−=
Проверка:
08,220945,70235,150721 =+−−=++=∑ tГГ FRRX -
реакции найдены правильно.
Суммарные реакции опор:

37
НRRR BГ 89,1589)62,505()35,1507( 2221
211 =−+−=+= ;
НRRR BГ 74,768)28,312()45,702( 2222
222 =−+−=+=
6.1.1.2 От действия муфты
Согласно ГОСТ Р 50891-96 значение радиальной консольной силы кF
для входного вала редуктора:
Бк TF ⋅= )125...50( ,
где мНТ Б ⋅= 1,43 - момент на входном валу.
НFк 63,820...25,3281,43)125...50( =⋅= , принимаем максимальное значение
консольной силы НFк 63,820= .
Реакции от силы кF :
∑ = 01М ; 0)( 22 =+⋅−⋅ llFlR кк ;
Нl
llFR кк 23,1228
151)75151(63,820)( 2
2 =−⋅
=+⋅
= .
∑ = 02М ; 021 =⋅−⋅ lFlR кк ;
.6,407151
7563,82021 Н
llFR к
к =⋅
−=⋅
=

38
Проверка:
063,82023,12286,40721 =+−=+− ккк FRR - реакции найдены правильно.
6.1.1.3 Для расчета подшипников
НRRF кr 49,199789,15896,40711max1 =+=+= ;
НRRF кr 97,199674,76823,122822max2 =+=+= .
Внешняя осевая сила, действующая на вал: НFF aA 6,408max == .
6.1.2 Эквивалентные нагрузки
Для типового режима нагружения II коэффициент эквивалентности
63,0=EK .
НFKF rEr 125849,199763,0max11 =⋅=⋅= ;
НFKF rEr 125897,199663,0max22 =⋅=⋅= ;
НFKF AEA 42,2576,40863,0max =⋅=⋅= .
6.1.3 Эквивалентная динамическая радиальная нагрузка
Для радиальных шарикоподшипников из условия равновесия вала
следует: 01 =aF , НFF Aa 42,2572 == . Дальнейшие расчеты выполняем для более
нагруженного подшипника опоры 2.
Отношение
207,046/0cos525,9/cos =°⋅=⋅ pww DD α ,
где ( ) ( ) ммdDDpw 46306221
21
=+=+= .

39
В соответствии с табл.7.3 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
имеем: 7,130 =f .
Коэффициент осевого нагружения согласно табл.7.2 [Глава 7](уч. П.Ф.
Дунаев, О.П. Леликов):
22,0100,10
42,2577,1328,028,023,0
3
23,0
0
20 =
⋅
⋅⋅=
⋅⋅=
r
a
CFfe .
Отношение 205,0)12581/(42,257)/( 22 =⋅=⋅ ra FVF , что меньше 22,0=e ( 1=V
при вращении внутреннего кольца). Окончательно принимаем согласно
табл.7.2 [Глава 7] (уч. .Ф. Дунаев, О.П. Леликов): 1=X , 0=Y .
Принимаем согласно табл.7.6 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
4,1=БK ; 1=TK ( )Ct раб °< 100 .
Эквивалентная динамическая радиальная нагрузка:
НKKFYFXVP TБarr 2,176114,1)42,2570125811()( 22 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅= .
6.1.4 Расчетный ресурс подшипника
Расчетный скорректированный ресурс подшипника при 11 =а
(вероятность безотказной работы 90%), 7,023 =а (обычные условия
применения), 3=k (шариковый подшипник):
.67,1666895060
102,1761
105,197,016010 6336
231 чnP
CaaLk
r
rah =
⋅⋅
⋅⋅⋅=
⋅⋅
⋅⋅=
6.2 Расчет подшипников на промежуточном валу
Исходные даные:
ü частота вращения вала - 14,180 −= минn ;

40
ü делительный диаметр шестерни тихоходной ступени -
ммd 594,601 = ;
ü делительный диаметр колеса быстроходной ступени -
ммd 356,2012 = ;
ü осевая сила, действующая на шестерню - НFa 3,13861 = ;
ü радиальная сила, действующая на шестерню - НFr 4,26671 = ;
ü окружная сила, действующая на шестерню - НFt 3,71961 = ;
ü осевая сила, действующая на колесо - НFa 6,4082 = ;
ü радиальная сила, действующая на колесо - НFr 9,8172 = ;
ü окружная сила, действующая на колесо - НFt 8,22092 = ;
ü расстояние между торцами для наружных колец подшипников -
ммlп 167= ;
ü линейные размеры - ммl 501 = , ммl 482 = ;
ü параметры выбранного подшипника:
Подшипник 206 ГОСТ 8338-75
Размеры: ммd 30= Грузоподъемность: кНCr 5,19=
ммD 62= кНC r 0,100 =
ммB 16= ммr 5,1=
ммDw 525,9=
°= 0α
6.2.1 Радиальные реакции опор
Расстояние между точками приложения радиальных реакций при
установке радиально-упорных подшипников по схеме «враспор»:
all п ⋅−= 2 ,

41
где a - смещение точки приложения радиальной реакции от торца
подшипника, для шариковых радиальных однорядных подшипников:
ммBa 82/162/ === ,
⇒ ммl 15182167 =⋅−= .
6.2.1.1 От сил в зацеплении
Ø в плоскости YOZ:
∑ = 01М ; 022
)( 22
1122112 =⋅+⋅+⋅−−⋅+⋅
dFdFlFllFlR aarrB ;
.74,20742356,2016,408
2594,603,1386489,817)50151(4,2667
1511
22)(1 2
21
122112
Н
dFdFlFllFl
R aarrB
−=
⋅+⋅+⋅−−⋅⋅−=
=
⋅+⋅+⋅−−⋅⋅−=
l 2
l n
l
l 1
R 2 r
R 2 B d 2
2
R 1 r
R 1 B
d 1
2
F r 2
F a 2
F r 1
F a 1
F t 2
F t 1

42
∑ = 02М ; 022
)( 11
2211221 =⋅−⋅−⋅+−⋅−⋅
dFdFlFllFlR aarrB ;
.24,2252594,603,1386
2356,2016,408504,2667)48151(9,817
1511
22)(1 1
12
211221
Н
dFdFlFllFl
R aarrB
=
⋅+⋅+⋅−−⋅⋅=
=
⋅+⋅+⋅−−⋅⋅=
Проверка: 09,8174,266774,207424,2252121 =−+−=−++=∑ rrBB FFRRY -
реакции найдены правильно.
Ø в плоскости XOZ:
∑ = 01М ; 0)( 11222 =−⋅+⋅+⋅ llFlFlR ttГ ;
Нl
llFlFR ttГ 87,5515
151)50151(3,7196488,2209)( 1122
2 −=−⋅+⋅
−=−⋅+⋅
−= .
∑ = 02М ; 0)( 11221 =⋅+−⋅+⋅ lFllFlR ttГ ;
( ) .23,3890151
503,7196481518,2209)( 11221 Н
llFllFR tt
Г −=⋅+−⋅
−=⋅+−⋅
−=
Проверка: 08,22093,719687,551523,38902121 =++−−=+++=∑ ttГГ FFRRX -
реакции найдены правильно.
Суммарные реакции опор:
НRRR BГ 74,3896)24,225()23,3890( 2221
211 =−+−=+= ;
НRRR BГ 17,5893)74,2074()87,5515( 2222
222 =−+−=+= .
6.2.1.2 Для расчета подшипников
НRFr 74,38961max1 == ;
НRFr 17,58932max2 == .
Внешняя осевая сила, действующая на вал: НFFF aaA 7,97721max =−= .

43
6.2.2 Эквивалентные нагрузки
Для типового режима нагружения II коэффициент эквивалентности
63,0=EK .
НFKF rEr 95,245474,389663,0max11 =⋅=⋅= ;
НFKF rEr 69,317217,589363,0max22 =⋅=⋅= ;
НFKF AEA 95,6157,97763,0max =⋅=⋅= .
6.2.3 Эквивалентная динамическая радиальная нагрузка
Для радиальных шарикоподшипников из условия равновесия вала
следует: 01 =aF , НFF Aa 95,6152 == . Дальнейшие расчеты выполняем для более
нагруженного подшипника опоры 2.
Отношение 207,046/0cos525,9/cos =°⋅=⋅ pww DD α ,
где ( ) ( ) ммdDDpw 46306221
21
=+=+= .
В соответствии с табл.7.3 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
имеем: 7,130 =f .
Коэффициент осевого нагружения согласно табл.7.2 [Глава 7](уч. П.Ф.
Дунаев, О.П. Леликов):
269,0100,10
95,6157,1328,028,023,0
3
23,0
0
20 =
⋅
⋅⋅=
⋅⋅=
r
a
CFfe .
Отношение 166,0)69,31721/(95,615)/( 22 =⋅=⋅ ra FVF , что меньше 269,0=e
( 1=V при вращении внутреннего кольца). Окончательно принимаем согласно
табл.7.2 [Глава 7] (уч. .Ф. Дунаев, О.П. Леликов): 1=X , 0=Y .

44
Принимаем согласно табл.7.6 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
4,1=БK ; 1=TK ( )Ct раб °< 100 .
Эквивалентная динамическая радиальная нагрузка:
НKKFYFXVP TБarr 77,519714,1)95,615069,317211()( 22 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅= .
6.2.4 Расчетный ресурс подшипника
Расчетный скорректированный ресурс подшипника при 11 =а
(вероятность безотказной работы 90%), 7,023 =а (обычные условия
применения), 3=k (шариковый подшипник):
.78,34144,18060
1077,5197
105,197,016010 6336
231 чnP
CaaLk
r
rah =
⋅⋅
⋅⋅⋅=
⋅⋅
⋅⋅=
6.3 Расчет подшипников на тихоходном валу
Исходные данные:
ü частота вращения вала - 15,36 −= минn ;
ü делительный диаметр шестерни быстроходной ступени -
ммd 406,2992 = ;
ü осевая сила, действующая на колесо - НFa 3,1386= ;
ü радиальная сила, действующая на колесо - НFr 4,2667= ;
ü окружная сила, действующая на колесо - НFt 3,7196= ;
ü расстояние между торцами для наружных колец подшипников -
ммlп 179= ;
ü линейные размеры - ммl 501 = , ммl 1052 = ;
ü параметры выбранного подшипника:
Подшипник 212 ГОСТ 8338-75
Размеры: ммd 60= Грузоподъемность: кНCr 0,52=

45
ммD 110= кНC r 0,310 =
ммB 22= ммr 5,2=
ммDw 875,15=
°= 0α
6.3.1 Радиальные реакции опор
Расстояние между точками приложения радиальных
реакций при установке радиально-упорных подшипников по
схеме «враспор»:
all п ⋅−= 2 ,
где a - смещение точки приложения радиальной реакции от торца
подшипника, для шариковых радиальных однорядных подшипников:
ммBa 112/222/ === ,
⇒ ммl 157112179 =⋅−= .
l 1
l n
l
l 2
R 1 B
R 1 r
F r
R 2 r
F a
F t
R 2 B d 1
2 F k

46
6.3.1.1 От сил в зацеплении
Ø в плоскости YOZ:
∑ = 01М ;
02
)( 212 =⋅+−⋅−⋅
dFllFlR arB ;
НdFllFl
R arB 64,31802406,2993,1386)50157(4,2667
1571
2)(1 2
12 =
⋅−−⋅⋅=
⋅−−⋅⋅=
∑ = 02М ; 02
211 =⋅−⋅−⋅
dFlFlR arB ;
.24,5132406,2993,1386504,2667
1571
21 2
11 НdFlFl
R arB −=
⋅−⋅⋅−=
⋅+⋅⋅=
Проверка: 04,266764,318024,51321 =−+−=−+=∑ rBB FRRY - реакции
найдены правильно.
Ø в плоскости XOZ:
∑ = 01М ; 0)( 12 =−⋅−⋅ llFlR tГ ;
Нl
llFR tГ 23,4706
157)50157(3,7196)( 1
2 =−⋅
=−⋅
= .
∑ = 02М ; 011 =⋅−⋅ lFlR tГ ;
.07,2490157
503,719611 Н
llFR t
Г =⋅
=⋅
=
Проверка: 03,719623,470607,249021 =−+=−+=∑ tГГ FRRX - реакции
найдены правильно.
Суммарные реакции опор:
НRRR BГ 41,2542)24,513()07,2490( 2221
211 =−+=+= ;
НRRR BГ 24,5680)64,3180()23,4706( 2222
222 =+=+= .

47
6.3.1.2 От действия муфты
Согласно ГОСТ Р 50891-96 значение радиальной консольной силы кF
для выходного вала редуктора:
Tк TF ⋅= 250 ,
где мНТT ⋅= 3,1077 - момент на входном валу.
НFк 56,82053,1077250 =⋅= .
Реакции от силы кF :
∑ = 01М ; 022 =⋅−⋅ lFlR кк ;
.44,5484157
10556,820521 Н
llFR к
к =⋅
=⋅
=
∑ = 02М ; 0)( 21 =+⋅−⋅ llFlR кк ;
.13690157
)105157(56,8205)( 21 Н
lllFR к
к =+⋅
=+⋅
=
Проверка: 056,820544,54841369021 =−−=−− ккк FRR - реакции найдены
правильно.

48
6.3.1.3 Для расчета подшипников
НRRF кr 41,1623241,25421369011max1 =+=+= ;
НRRF кr 68,1117424,568044,549422max2 =+=+= .
Внешняя осевая сила, действующая на вал: НFF aA 3,1386max == .
6.3.2 Эквивалентные нагрузки
Для типового режима нагружения II коэффициент эквивалентности
63,0=EK .
НFKF rEr 42,1022641,1623263,0max11 =⋅=⋅= ;
НFKF rEr 05,704068,1117463,0max22 =⋅=⋅= ;
НFKF AEA 37,8733,138663,0max =⋅=⋅= .
6.3.3 Эквивалентная динамическая радиальная нагрузка
Для радиальных шарикоподшипников из условия равновесия вала
следует: НFF Aa 37,8731 == , 02 =aF . Дальнейшие расчеты выполняем для более
нагруженного подшипника опоры 1.
Отношение 187,085/0cos875,15/cos =°⋅=⋅ pww DD α ,
где ( ) ( ) ммdDDpw 856011021
21
=+=+= .
В соответствии с табл.7.3 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
имеем: 2,140 =f .
Коэффициент осевого нагружения согласно табл.7.2 [Глава 7](уч. П.Ф.
Дунаев, О.П. Леликов):

49
227,0100,31
37,8732,1428,028,023,0
3
23,0
0
10 =
⋅
⋅⋅=
⋅⋅=
r
a
CFfe .
Отношение 085,0)42,102261/(37,873)/( 11 =⋅=⋅ ra FVF , что меньше 227,0=e
( 1=V при вращении внутреннего кольца). Окончательно принимаем согласно
табл.7.2 [Глава 7] (уч. .Ф. Дунаев, О.П. Леликов): 1=X , 0=Y .
Принимаем согласно табл.7.6 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
4,1=БK ; 1=TK ( )Ct раб °< 100 .
Эквивалентная динамическая радиальная нагрузка:
НKKFYFXVP TБarr 99,1431614,1)37,873042,1022611()( 11 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅= .
6.3.4 Расчетный ресурс подшипника
Расчетный скорректированный ресурс подшипника при 11 =а
(вероятность безотказной работы 90%), 7,023 =а (обычные условия
применения), 3=k (шариковый подшипник):
.72,153145,3660
1099,14316
100,527,016010 6336
231 чnP
CaaLk
r
rah =
⋅⋅
⋅⋅⋅=
⋅⋅
⋅⋅=
Расчетный ресурс выбранного нами подшипника для промежуточного
вала значительно меньше требуемого ресурса!
С целью уменьшения номенклатуры, установим и рассчитаем ресурс
роликовых конических радиально-упорных подшипников для всех валов.
6.4 Расчет подшипников на быстроходном валу
Исходные данные:
ü частота вращения вала - 1950 −= минn ;

50
ü делительный диаметр шестерни быстроходной ступени -
ммd 644,381 = ;
ü осевая сила, действующая на шестерню - НFa 6,408= ;
ü радиальная сила, действующая на шестерню - НFr 9,817= ;
ü окружная сила, действующая на шестерню - НFt 8,2209= ;
ü расстояние между торцами для наружных колец подшипников -
ммlп 5,169= ;
ü линейные размеры - ммl 57'1 = , ммl 66'2 = ;
ü параметры выбранного подшипника:
Подшипник 7206А ГОСТ 27365-87
Размеры: ммd 30= Грузоподъемность: кНCr 0,38=
ммD 62= кНC r 5,250 =
ммB 16= Расчетные параметры: 37,0=e
ммrммr 1;1 21 == 6,1=Y
ммТ наиб 5,17= 9,00 =Y
ммC 14=
°= 14α
6.4.1 Радиальные реакции опор
l 1
l n
l
F k
l 2
R 1 B
R 1 r F r R 2 r
F a
F t
R 2 B
d 1
2

51
Расстояние между точками приложения радиальных реакций при
установке радиально-упорных подшипников по схеме «враспор»:
all п ⋅−= 2 ,
где a - смещение точки приложения радиальной реакции от торца
подшипника, для роликовых конических радиально-упорных однорядных
подшипников:
[ ][ ] мм
eDdТa42,143/37,0)6230(5,175,0
3/)(5,0=⋅++⋅=
=⋅++⋅= ,
⇒ ммl 65,14042,1425,169 =⋅−= ;
ммall 58,4242,1457'11 =−=−= ;
ммall 42,8042,1466'22 =+=+= ;
6.4.1.1 От сил в зацеплении
Ø в плоскости YOZ:
∑ = 01М ; 02
112 =⋅+⋅+⋅
dFlFlR arB ;
НdFlFl
R arB 71,3032644,386,40858,429,817
65,1401
21 1
12 −=
⋅+⋅⋅−=
⋅+⋅⋅−= .
∑ = 02М ; 02
)( 111 =⋅+−⋅−⋅−
dFllFlR arB ;
.19,5142644,386,408)58,4265,140(9,817
65,1401
2)(1 1
11
Н
dFllFl
R arB
−=
=
⋅−−⋅⋅−=
⋅−−⋅⋅−=
Проверка: 09,81771,30319,51421 =+−−=++=∑ rBB FRRY - реакции
найдены правильно.

52
в плоскости XOZ:
∑ = 01М ; 012 =⋅+⋅ lFlR tГ ;
Нl
lFR tГ 92,668
65,14058,428,22091
2 −=⋅
−=⋅
−= .
∑ = 02М ; 0)( 11 =−⋅+⋅ llFlR tГ ;
( ) ( ) .88,154065,140
58,4265,1408,220911 Н
lllF
R tГ −=
−⋅−=
−⋅−=
Проверка: 08,220992,66888,154021 =+−−=++=∑ tГГ FRRX - реакции
найдены правильно.
Суммарные реакции опор:
НRRR BГ 41,1624)19,514()88,1504( 2221
211 =−+−=+= ;
НRRR BГ 64,734)71,303()92,668( 2222
222 =−+−=+=
6.4.1.2 От действия муфты:
Согласно ГОСТ Р 50891-96 значение радиальной консольной силы кF
для входного вала редуктора:
Бк TF ⋅= )125...50( ,
где мНТ Б ⋅= 1,43 - момент на входном валу.
НFк 63,820...25,3281,43)125...50( =⋅= , принимаем максимальное значение

53
консольной силы НFк 63,820= .
Реакции от силы кF :
∑ = 01М ; 0)( 22 =+⋅−⋅ llFlR кк ;
Нl
llFR кк 49,1289
65,140)42,8065,140(63,820)( 2
2 =−⋅
=+⋅
= .
∑ = 02М ; 021 =⋅−⋅ lFlR кк ;
.86,46865,140
42,8063,82021 Н
llFR к
к =⋅
−=⋅
=
Проверка: 063,82049,128986,46821 =+−=+− ккк FRR - реакции найдены
правильно.
6.4.1.3 Для расчета подшипников
НRRF кr 27,209341,162486,46811max1 =+=+= ;
НRRF кr 13,202464,73449,128922max2 =+=+= .
Внешняя осевая сила, действующая на вал: НFF aA 6,408max == .
6.4.2 Эквивалентные нагрузки
Для типового режима нагружения II коэффициент эквивалентности
63,0=EK .
НFKF rEr 76,131827,209363,0max11 =⋅=⋅= ;
НFKF rEr 81,127413,202463,0max22 =⋅=⋅= ;
НFKF AEA 42,2576,40863,0max =⋅=⋅= .

54
6.4.3 Эквивалентная динамическая радиальная нагрузка Минимально необходимые для нормальной работы радиально-упорных
подшипников осевые силы:
НFeF ra 99,40476,131837,083,083,0 1min1 =⋅⋅=⋅⋅= ;
НFeF ra 49,39181,127437,083,083,0 2min2 =⋅⋅=⋅⋅= .
Находим осевые силы нагружающие подшипники. Так как min2min1 aa FF >
и 0>AF , то по табл.7.4 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов):
НFF aa 99,404min11 == ;
НFFF Aaa 41,66242,25799,40412 =+=+= .
Отношение 307,0)76,13181/(99,404)/( 11 =⋅=⋅ ra FVF , что меньше 37,0=e
( 1=V при вращении внутреннего кольца). Тогда для опоры 1: 1=X , 0=Y .
Отношение 52,0)81,12741/(41,662)/( 22 =⋅=⋅ ra FVF , что больше 37,0=e ( 1=V
при вращении внутреннего кольца). Тогда для опоры 2: 4,0=X , 6,1=Y .
Принимаем согласно табл.7.6 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
4,1=БK ; 1=TK ( )Ct раб °< 100 .
Эквивалентная динамическая радиальная нагрузка в опорах 1 и 2:
НKKFYFXVP TБarr 26,184614,1)99,404076,131811()( 111 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅= ;
НKKFYFXVP TБarr 69,219714,1)42,662081,127411()( 222 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅=
6.4.4 Расчетный ресурс подшипника Для подшипника более нагруженной опоры 2 вычисляем расчетный
скорректированный ресурс подшипника при 11 =а (вероятность безотказной
работы 90%), 6,023 =а (обычные условия применения), 3/10=k (роликовый
подшипник):

55
.12,14071395060
1069,2197
100,386,016010 63/1036
231 чnP
CaaLk
r
rah =
⋅⋅
⋅⋅⋅=
⋅⋅
⋅⋅=
6.5 Расчет подшипников на промежуточном валу
Исходные данные:
ü частота вращения вала - 14,180 −= минn ;
ü делительный диаметр шестерни тихоходной ступени -
ммd 594,601 = ;
ü делительный диаметр колеса быстроходной ступени -
ммd 356,2012 = ;
ü осевая сила, действующая на шестерню - НFa 3,13861 = ;
ü радиальная сила, действующая на шестерню - НFr 4,26671 = ;
ü окружная сила, действующая на шестерню - НFt 3,71961 = ;
ü осевая сила, действующая на колесо - НFa 6,4082 = ;
ü радиальная сила, действующая на колесо - НFr 9,8172 = ;
ü окружная сила, действующая на колесо - НFt 8,22092 = ;
ü расстояние между торцами для наружных колец подшипников -
ммlп 5,169= ;
ü линейные размеры - ммl 57'1 = , ммl 59'2 = ;
ü параметры выбранного подшипника:
Подшипник 7206А ГОСТ 27365-87
Размеры: ммd 30= Грузоподъемность: кНCr 0,38=
ммD 62= кНC r 5,250 =
ммB 16= Расчетные параметры: 37,0=e

56
l 2
l n
l
l 1
R 2 r
R 2 B d 2
2
R 1 r
R 1 B
d 1
2
F r 2
F a 2
F r 1
F a 1
F t 2
F t 1
ммrммr 1;1 21 == 6,1=Y
ммТ наиб 5,17= 9,00 =Y
ммC 14=
°= 14α
6.5.1 Радиальные реакции опор
Расстояние между точками приложения радиальных реакций при
установке радиально-упорных подшипников по схеме «враспор»:
all п ⋅−= 2 ,
где a - смещение точки приложения радиальной реакции от торца
подшипника, для роликовых конических радиально-упорных однорядных
подшипников:
[ ][ ] мм
eDdТa42,143/37,0)6230(5,175,0
3/)(5,0=⋅++⋅=
=⋅++⋅= ,
⇒ ммl 65,14042,1425,169 =⋅−= ;

57
ммall 58,4242,1457'11 =−=−= ;
ммall 58,4442,1459'22 =+=+= ;
6.5.1.1 От сил в зацеплении:
Ø в плоскости YOZ:
∑ = 01М ; 022
)( 22
1122112 =⋅+⋅+⋅−−⋅+⋅
dFdFlFllFlR aarrB ;
.53,21652356,2016,408
2594,603,138658,449,817)58,4265,140(4,2667
65,1401
22)(1 2
21
122112
Н
dFdFlFllFl
R aarrB
−=
=
⋅+⋅+⋅−−⋅⋅−=
=
⋅+⋅+⋅−−⋅⋅−=
∑ = 02М ; 022
)( 11
2211221 =⋅−⋅−⋅+−⋅−⋅
dFdFlFllFlR aarrB ;
.03,3162594,603,1386
2356,2016,40858,424,2667)58,4465,140(9,817
65,1401
22)(1 1
12
211221
Н
dFdFlFllFl
R aarrB
=
⋅+⋅+⋅−−⋅⋅=
=
⋅+⋅+⋅−−⋅⋅=
Проверка: 09,8174,266753,216503,3162121 =−+−=−++=∑ rrBB FFRRY -
реакции найдены правильно.
Ø в плоскости XOZ:
∑ = 01М ; 0)( 11222 =−⋅+⋅+⋅ llFlFlR ttГ ;
Нl
llFlFR ttГ 53,5584
65,140)58,4265,140(3,7196488,2209)( 1122
2 −=−⋅+⋅
−=−⋅+⋅
−= .
∑ = 02М ; 0)( 11221 =⋅+−⋅+⋅ lFllFlR ttГ ;
( ) .57,382165,140
58,423,719658,4465,1408,2209)( 11221 Н
llFllF
R ttГ −=
⋅+−⋅−=
⋅+−⋅−=
Проверка: 08,22093,719653,558457,38212121 =++−−=+++=∑ ttГГ FFRRX -
реакции найдены правильно.

58
Суммарные реакции опор:
НRRR BГ 62,3834)03,316()57,3821( 2221
211 =−+−=+= ;
НRRR BГ 7,5989)53,2165()53,5584( 2222
222 =−+−=+= .
6.5.1.3 Для расчета подшипников
НRFr 62,38341max1 == ;
НRFr 7,59892max2 == .
Внешняя осевая сила, действующая на вал: НFFF aaA 7,97721max =−= .
6.5.2 Эквивалентные нагрузки
Для типового режима нагружения II коэффициент эквивалентности
63,0=EK .
НFKF rEr 81,241562,383463,0max11 =⋅=⋅= ;
НFKF rEr 51,37737,598963,0max22 =⋅=⋅= ;
НFKF AEA 95,6157,97763,0max =⋅=⋅= .
6.5.3 Эквивалентная динамическая радиальная нагрузка
Минимально необходимые для нормальной работы радиально-упорных
подшипников осевые силы:
НFeF ra 89,74181,241537,083,083,0 1min1 =⋅⋅=⋅⋅= ;
НFeF ra 84,115851,377337,083,083,0 2min2 =⋅⋅=⋅⋅= .

59
Находим осевые силы нагружающие подшипники. Так как min2min1 aa FF <
и 95,41695,615 min1min2 =−≥= aaA FFF , то по табл.7.4 [Глава 7](уч. П.Ф. Дунаев,
О.П. Леликов):
НFF aa 89,741min11 == ;
НFFF Aaa 85,135751,61589,74112 =+=+= .
Отношение 307,0)81,24151/(89,741)/( 11 =⋅=⋅ ra FVF , что меньше 37,0=e
( 1=V при вращении внутреннего кольца). Тогда для опоры 1: 1=X , 0=Y .
Отношение 36,0)51,37731/(85,1357)/( 22 =⋅=⋅ ra FVF , что меньше 37,0=e
( 1=V при вращении внутреннего кольца). Тогда для опоры 2: 1=X , 0=Y .
Принимаем согласно табл.7.6 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
4,1=БK ; 1=TK ( )Ct раб °< 100 .
Эквивалентная динамическая радиальная нагрузка в опорах 1 и 2:
НKKFYFXVP TБarr 13,338214,1)89,741081,241511()( 111 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅= ;
НKKFYFXVP TБarr 91,528214,1)51,1357051,377311()( 222 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅=
6.5.4 Расчетный ресурс подшипника
Для подшипника более нагруженной опоры 2 вычисляем расчетный
скорректированный ресурс подшипника при 11 =а (вероятность безотказной
работы 90%), 6,023 =а (обычные условия применения), 3/10=k (роликовый
подшипник):
.69,398224,18060
1091,5282
100,386,016010 63/1036
231 чnP
CaaLk
r
rah =
⋅⋅
⋅⋅⋅=
⋅⋅
⋅⋅=

60
6.6 Расчет подшипников на тихоходном валу
Исходные данные:
ü частота вращения вала - 15,36 −= минn ;
ü делительный диаметр шестерни быстроходной ступени -
ммd 406,2992 = ;
ü осевая сила, действующая на колесо - НFa 3,1386= ;
ü радиальная сила, действующая на колесо - НFr 4,2667= ;
ü окружная сила, действующая на колесо - НFt 3,7196= ;
ü расстояние между торцами для наружных колец подшипников -
ммlп 5,182= ;
ü линейные размеры - ммl 66'1 = , ммl 86'2 = ;
ü параметры выбранного подшипника:
Подшипник 7212А ГОСТ 27365-87
Размеры: ммd 60= Грузоподъемность: кНCr 3,91=
ммD 110= кНC r 0,700 =
ммB 22= Расчетные параметры: 4,0=e
ммrммr 5,1;2 21 == 5,1=Y
ммТ наиб 24= 8,00 =Y
ммC 19=
°= 14α
6.6.1 Радиальные реакции опор
Расстояние между точками приложения радиальных реакций при
установке радиально-упорных подшипников по схеме «враспор»:
all п ⋅−= 2 ,

61
где a - смещение точки приложения радиальной реакции от торца
подшипника, для роликовых конических радиально-упорных однорядных
подшипников:
[ ][ ] мм
eDdТa33,233/4,0)11060(245,0
3/)(5,0=⋅++⋅=
=⋅++⋅= ,
⇒ ммl 83,13533,2325,182 =⋅−= ;
ммall 67,4242,1457'11 =−=−= ;
ммall 33,10942,1459'22 =+=+= ;
6.6.1.1 От сил в зацеплении
Ø в плоскости YOZ:
∑ = 01М ;
02
)( 212 =⋅+−⋅−⋅
dFllFlR arB ;
.69,3012406,2993,1386)67,4283,135(4,2667
83,1351
2)(1 2
12
Н
dFllFl
R arB
=
=
⋅−−⋅⋅=
⋅−−⋅⋅=
∑ = 02М ; 02
211 =⋅−⋅−⋅
dFlFlR arB ;
l 1
l n
l
l 2
R 1 B
R 1 r
F r
R 2 r
F a
F t
R 2 B d 1
2 F k

62
.71,23652406,2993,138667,424,2667
83,1351
21 2
11 НdFlFl
R arB =
⋅−⋅⋅−=
⋅+⋅⋅=
Проверка: 04,266769,30171,236521 =−+=−+=∑ rBB FRRY - реакции
найдены правильно.
Ø в плоскости XOZ:
∑ = 01М ; 0)( 12 =−⋅−⋅ llFlR tГ ;
Нl
llFR tГ 87,4935
83,135)67,4283,135(3,7196)( 1
2 −=−⋅
=−⋅
= .
∑ = 02М ; 011 =⋅−⋅ lFlR tГ ;
.43,226083,135
67,423,719611 Н
llFR t
Г −=⋅
=⋅
=
Проверка: 03,719687,493543,226021 =−−−=−+=∑ tГГ FRRX - реакции
найдены правильно.
Суммарные реакции опор:
НRRR BГ 02,3272)71,2365()43,2260( 2221
211 =+−=+= ;
НRRR BГ 08,4945)69,301()87,4935( 2222
222 =+−=+= .
6.6.1.2 От действия муфты
Согласно ГОСТ Р 50891-96 значение радиальной консольной силы кF
для выходного вала редуктора:
Tк TF ⋅= 250 ,
где мНТT ⋅= 3,1077 - момент на входном валу.

63
НFк 56,82053,1077250 =⋅= .
Реакции от силы кF :
∑ = 01М ; 022 =⋅−⋅ lFlR кк ;
.660583,135
33,10956,820522 Н
llFR к
к =⋅
=⋅
=
∑ = 02М ; 0)( 21 =+⋅−⋅ llFlR кк ;
.1481083,135
)33,10983,135(56,8205)( 21 Н
lllFR к
к =−⋅
=+⋅
=
Проверка: 056,8205660556,1481021 =−−=−− ккк FRR - реакции найдены
правильно.
6.6.1.3 Для расчета подшипников
НRRF кr 3,1808202,327256,1481011max1 =+=+= ;
НRRF кr 8,1154908,4945660522max2 =+=+= .
Внешняя осевая сила, действующая на вал: НFF aA 3,1386max == .

64
6.6.2 Эквивалентные нагрузки
Для типового режима нагружения II коэффициент эквивалентности
63,0=EK .
НFKF rEr 85,113913,1808263,0max11 =⋅=⋅= ;
НFKF rEr 37,72768,1154963,0max22 =⋅=⋅= ;
НFKF AEA 37,8733,138663,0max =⋅=⋅= .
6.6.3 Эквивалентная динамическая радиальная нагрузка
Минимально необходимые для нормальной работы радиально-упорных
подшипников осевые силы:
НFeF ra 09,378285,113914,083,083,0 1min1 =⋅⋅=⋅⋅= ;
НFeF ra 76,241537,72764,083,083,0 2min2 =⋅⋅=⋅⋅= .
Находим осевые силы нагружающие подшипники. Так как min2min1 aa FF >
и 0≥AF , то по табл.7.4 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов):
НFF aa 09,3782min11 == ;
НFFF Aaa 46,465537,87309,378212 =+=+= .
Отношение 332,0)85,113911/(09,3782)/( 11 =⋅=⋅ ra FVF , что меньше 4,0=e
( 1=V при вращении внутреннего кольца). Тогда для опоры 1: 1=X , 0=Y .
Отношение 64,0)37,72761/(46,4655)/( 22 =⋅=⋅ ra FVF , что больше 4,0=e
( 1=V при вращении внутреннего кольца). Тогда для опоры 2: 4,0=X , 5,1=Y .
Принимаем согласно табл.7.6 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
4,1=БK ; 1=TK ( )Ct раб °< 100 .
Эквивалентная динамическая радиальная нагрузка в опорах 1 и 2:

65
НKKFYFXVP TБarr 59,1594814,1)09,3782085,1139111()( 111 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅= ;
НKKFYFXVP TБarr 24,1385114,1)46,4655037,727611()( 222 =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅=
6.6.4 Расчетный ресурс подшипника
Для подшипника более нагруженной опоры 1 вычисляем расчетный
скорректированный ресурс подшипника при 11 =а (вероятность безотказной
работы 90%), 6,023 =а (обычные условия применения), 3/10=k (роликовый
подшипник):
.49,919465,3660
1059,15948
103,916,016010 63/1036
231 чnP
CaaLk
r
rah =
⋅⋅
⋅⋅⋅=
⋅⋅
⋅⋅=
6.7 Расчет подшипников на приводном валу
Исходные данные:
ü частота вращения вала - 15,36 −= минn ;
ü окружная сила, действующая на 2 звездочки - НFt 8000=∑ ;
ü линейные размеры - ммl 150= , ммl 1130 = ;
ü параметры выбранного подшипника:
Подшипник 1212 ГОСТ 28428-90
Размеры: ммd 60= Грузоподъемность: кНCr 0,30=
ммD 110= кНC r 0,160 =
ммB 22= Расчетные параметры: 19,0=e
ммr 5,2= eFF ra ≤/ : 1=X 4,3=Y
ммC 19= eFF ra >/ : 65,0=X 27,5=Y
57,30 =Y

66
l 2 l
R 1 B
R 1 r R 2 r
R 2 B
l 0
F k
F t F t
l
F r F r
6.7.1 Радиальные реакции опор
Расстояние между точками приложения радиальных реакций l⋅4 .
На каждую звездочку будет действовать максимальная окружная сила
НFF tt 560080007,07,0 =⋅=⋅= ∑ .
Радиальная сила действующая на звездочки:
НFF tr 840056005,15,1 =⋅=⋅= .
6.7.1.1 От сил в зацеплении
Ø в плоскости YOZ:
∑ = 01М ;
0342 =⋅−⋅⋅−⋅⋅ lFlFlR rrB ;
.84002 НFR rB == .
∑ = 02М ; 0341 =⋅−⋅⋅−⋅⋅ lFlFlR rrB ;
.84002 НFR rB ==

67
Проверка: 08400284008400221 =⋅−+=⋅−+=∑ rBB FRRY - реакции
найдены правильно.
Ø в плоскости XOZ:
∑ = 01М ; 0342 =⋅−⋅⋅−⋅⋅ lFlFlR ttГ ;
.56002 НFR tГ == .
∑ = 02М ; 0341 =⋅−⋅⋅−⋅⋅ lFlFlR ttГ ;
.56001 НFR tГ ==
Проверка: 05600256005600221 =⋅−+=⋅−+=∑ tГГ FRRX - реакции
найдены правильно.
Суммарные реакции опор:
НRRR BГ 54,10095)8400()5600( 2221
211 =+=+= ;
НRRR BГ 54,100095)8400()5600( 2222
222 =+=+= .
6.7.1.2 От действия муфты
Радиальная сила на валу от упругой муфты:
∆⋅= pк CF ,
где мм7,0=∆ - радиальное смещение валов.
3180 Нp TС ⋅= - радиальная жесткость упругой муфты при радиальном
смещении валов, здесь мНTH ⋅= 1150 - номинальный вращающий момент
муфты по каталогу.
НFк 09,132011501807,0 =⋅⋅= .

68
Реакции от силы кF :
∑ = 01М ; 04 02 =⋅−⋅⋅ lFlR кк ;
.62,2481504
11309,13204
22 Н
llFR к
к =⋅
⋅=
⋅⋅
=
∑ = 02М ; 0)4(4 01 =+⋅⋅−⋅⋅ llFlR кк ;
.71,15681504
)1131504(09,13204
)4( 01 Н
lllFR к
к =⋅
+⋅⋅=
⋅+⋅⋅
=
Проверка: 009,132062,24871,156821 =−−=−− ккк FRR - реакции найдены
правильно.
6.7.1.3 Для расчета подшипников
НRRFНRRF
кr
кr
16,1034454,1009562,24825,1166471,156854,10095
222
111
=+=+==+=+= ⇒ более нагружена опора 1.
6.7.3 Эквивалентная динамическая радиальная нагрузка
При отсутствии осевых сил 0)/( =⋅ ra FVF , что меньше 19,0=e ( 1=V при
вращении внутреннего кольца). Тогда 1=X , 0=Y .
Принимаем согласно табл.7.6 [Глава 7](уч. П.Ф. Дунаев, О.П. Леликов)
1,1=БK ; 1=TK ( )Ct раб °< 100 .
Эквивалентная динамическая радиальная нагрузка в опорах 1 и 2:
R 1 k
R 2 k
4 l l 0
F k

69
НKKFYFXVP TБarr 68,1283011,1)0025,1166411()( =⋅⋅⋅+⋅⋅=⋅⋅⋅+⋅⋅= ;
Для типового режима нагружения II коэффициент эквивалентности
63,0=EK .
НPKP rErE 04,705368,1283063,0 =⋅=⋅= .
6.7.4 Расчетный ресурс подшипника
Для подшипника более нагруженной опоры 1 вычисляем расчетный
скорректированный ресурс подшипника при 11 =а (вероятность безотказной
работы 90%), 55,023 =а (обычные условия применения), 3=k (роликовый
подшипник):
.51,193265,3660
1004,7053
100,3055,016010 6336
231 чnP
CaaLk
rЕ
rah =
⋅⋅
⋅⋅⋅=
⋅⋅
⋅⋅=

70
7. Конструирование корпусных деталей и крышек подшипников
7.1 Конструирование крышек подшипников
Материал крышек – СЧ15.
Были выбраны привертные крышки.
Т.к. подшипники на быстроходном и промежуточном валу одинаковые,
крышки будут также одинаковыми, что способствует уменьшению
номенклатуры.
7.1.1 Крышки подшипников быстроходного и промежуточного
валов
Определяющим при конструировании крышки является диаметр
ммD 62= отверстия в корпусе под подшипник.
Согласно рекомендациям по выбору толщины δ стенки, диаметра d и
числа z винтов крепления крышки к корпусу в зависимости от D :
4;6;5 === zммdммδ .
Размеры других конструктивных элементов крышки:
.6;4,88...866)4,4...4(62)4,4...4(;5...5,45)1...9,0()1...9,0(;652,12,1 21
ммdСммdDDмммм
ф ≈≈=⋅+=⋅+==⋅=⋅==⋅=⋅= δδδδ
Принимаем .88;5,42 ммDмм ф ==δ
Чтобы поверхности фланца крышки и торца корпуса сопрягались по
плоскости, на цилиндрической центрирующей поверхности перед торцом
фланца делается канавка шириной ммb 5= , согласно табл.7.10 [Глава 7](уч.
П.Ф. Дунаев, О.П. Леликов). Крышку базируют по торцу фланца, поэтому
поясок l с центрирующей цилиндрической поверхностью делается

71
небольшим, чтобы он не мешал установке крышки по торцу корпуса:
ммbl 5≈≈ .
7.1.1 Крышки подшипников тихоходного вала
Определяющим при конструировании крышки является диаметр
ммD 110= отверстия в корпусе под подшипник.
Согласно рекомендациям по выбору толщины δ стенки, диаметра d и
числа z винтов крепления крышки к корпусу в зависимости от D :
6;10;7 === zммdммδ .
Размеры других конструктивных элементов крышки:
.10;154...15010)4,4...4(110)4,4...4(;7...3,67)1...9,0()1...9,0(;4,872,12,1 21
ммdСммdDDмммм
ф ≈≈=⋅+=⋅+==⋅=⋅==⋅=⋅= δδδδ
Принимаем .154;72 ммDмм ф ==δ
Чтобы поверхности фланца крышки и торца корпуса сопрягались по
плоскости, на цилиндрической центрирующей поверхности перед торцом
фланца делается канавка шириной ммb 8= , согласно табл.7.10 [Глава 7](уч.
П.Ф. Дунаев, О.П. Леликов). Крышку базируют по торцу фланца, поэтому
поясок l с центрирующей цилиндрической поверхностью делается
небольшим, чтобы он не мешал установке крышки по торцу корпуса:
ммbl 8≈≈ .
7.2 Конструирование корпуса и крышки редуктора
7.2.1 Общие рекомендации
Материал корпуса – СЧ15.
Толщина δ стенок для чугунных отливок в зависимости от

72
приведенного габарита N корпуса:
мN , …………………………. 0,40 0,6 1,0 1,5 2,0
мм,δ ……………………….. 7 8 10 12 14
Здесь 3/)2( HBLN ++⋅= , где L, B и H – длина, ширина и высота
корпуса, м.
Приблизительно: мммL 495,048,495 == ; мммВ 1325,05,132 == ;
мммН 348,031,348 == ⇒ мN 49,03/)348,01325,0495,02( =++⋅= .
Толщина стенки, отвечающая требованиям технологии литья,
необходимой прочности и жесткости корпуса:
ммTТ 63,1 4 ≥⋅=δ ,
где мНТТ ⋅= 3,1077 – вращающий момент на выходном (тихоходном)
валу.
мммм 65,73,10773,1 4 ≥=⋅=δ .
Принимаем толщину стенки мм8=δ .
Радиусы дуг, сопрягающих плоские стенки: ммr 485,05,0 =⋅=⋅≈ δ ;
ммR 1285,15,1 =⋅=⋅≈ δ .
Толщина внутренних ребер .4,688,08,0 ммР =⋅=⋅= δδ
Обрабатываемые поверхности выполняются в виде платиков, высота
которых ммh 4...2,38)5,0...4,0()5,0...4,0( =⋅=⋅= δ .
7.2.2 Конструктивное оформление внутреннего контура редуктора
Из центра тихоходного вала проводится тонкой линией дуга
окружности радиусом: adR a +⋅= 21 5,0 , где ммd a 306,3042 = - наружный диаметр
зубчатого колеса, мма 11= - зазор ⇒ ммR 153,16311306,3045,01 =+⋅= .
Из центра быстроходного вала проводится дуга радиусом БR , в
качестве которого принимается большее из двух:
adR aБ +⋅= 15,0 или aDRБ +⋅= 5,0 ,
где ммd a 644,421 = - наружный диаметр шестерни,

73
ммD 62= - диаметр отверстия в корпусе для опоры быстроходного вала.
ммRБ 322,3211644,425,0 =+⋅= или ммRБ 4211625,0 =+⋅=
⇒ ммRБ 42= .
Толщина стенки крышки редуктора мммм 62,789,09,01 ≥≈⋅≈⋅≈ δδ ,
принимаем мм71 =δ .
Расстояние между дном корпуса и поверхностью колеса
ммab 4411440 ≈⋅≈⋅≈ .
Для соединения корпуса и крышки по всему контуру плоскости
разъема редуктора выполняются специальные фланцы. На коротких боковых
сторонах фланцы располагаются внутрь от стенки корпуса. Размеры
конструктивных элементов:
ммf 5,3...8,27)5,0...4,0()5,0...4,0( 1 =⋅=⋅= δ ;
ммb 1285,15,1 =⋅=⋅= δ ;
ммb 5,1075,15,1 11 =⋅=⋅= δ ;
ммl 6,17...128)5,2...2()5,2...2( =⋅=⋅= δ .
На продольных длинных сторонах редуктора фланцы корпуса
располагают внутрь от стенки корпуса, а фланцы крышки – снаружи.
7.2.3 Конструктивное оформление приливов для подшипниковых
гнезд
Диаметр прилива для привертной крышки принимается:
ммDD фп 6...4+= ,
где фD - диметр фланца крышки подшипника.

74
Для быстроходного и промежуточного валов: ммDф 88= ;
ммммDп 94...926...488 =+= .
Для тихоходного вала: ммDф 154= ; ммммDп 160...1586...4154 =+= .
7.2.4 Крепление крышки редуктора к корпусу
Для крепления крышки с корпусом используются винты с
цилиндрической головкой с шестигранным углублением «под ключ».
Размеры конструктивных элементов:
.2;05,1;1,2;1,1;35,2 11 dDdСdKdСdK ⋅≈⋅=⋅=⋅=⋅=
Диаметр d винтов крепления крышки принимается в зависимости от
вращающего момента ( мНТТ ⋅= 3,1077 ) на выходном валу редуктора:
.108,123,107725,125,1 33 ммТd Т ≥=⋅=⋅=
Принимаем ммd 12= ⇒ ;2,13121,1;2821235,2 ммСммK =⋅==⋅=
.24122;6,121205,1;2,25121,2 11 ммDммСммK ≈⋅≈=⋅==⋅=
7.2.5 Фиксирование крышки относительно корпуса
Необходимая точность фиксирования достигается штифтами, которые
располагаются на наибольшем расстоянии друг от друга.
Диаметр штифтов: ddшт ⋅= )8,0...7,0( , где ммd 12= - диаметр крепежного
винта
⇒ ммdшт 6,9...4,812)8,0...7,0( =⋅= , принимаем ммdшт 8= .

75
Поверхности сопряжения корпуса и крышки для плотного их
прилегания шабрят и шлифуют. При сборке узла эти поверхности для
лучшего уплотнения покрывают тонким слоем герметика. Прокладки в
полость разъема не ставят вследствие вызываемых ими искажения формы
посадочных отверстий под подшипники и смещения осей отверстий с
плоскости разъема.
7.2.6 Конструктивное оформление опорной части корпуса
Опорная поверхность корпуса выполняется в виде нескольких
небольших платиков, расположенных в местах установки болтов.
Диаметр винта крепления редуктора к раме: ddф ⋅≈ 25,1 , где ммd 12= -
диаметр винта крепления крышки и корпуса редуктора ⇒ ммdф 151225,1 ≈⋅≈ ,
принимаем ммdф 16= . Т.к. межосевое расстояние ммммa T 315180 ≤=ω , то
число винтов 4=z .
Место крепления корпуса к раме оформляется в виде ниш,
расположенных по углам корпуса, высота ниши:
ммdh ф 60)816(5,2)(5,20 =+⋅=+⋅= δ .
7.2.7 Оформление сливных отверстий
Прилив сливного отверстия в корпусе выступает над
необрабатываемой поверхностью на высоту ммh 485,05,01 =⋅=⋅= δ .
Отверстие для выпуска масла закрывается пробкой с конической
резьбой "2/1K .
Размеры пробки: .1,8;5,13;54,21;2,21 ммbммLммDммd ====
Для наблюдения за уровнем масла в корпусе установлена такая же
пробка с конической резьбой "2/1K .

76
7.2.8 Оформление проушин
Для подъема и транспортирования крышки корпуса и редуктора в
сборе применяются проушины.
Размеры проушин:
ммSммd 21...147)3...2()3...2(;21733 11 =⋅=⋅≈≈⋅≈⋅≈ δδ ;
.21ммdR ≈≈
7.2.9 Оформление крышки люка
Для залива масла в редуктор, контроля правильности зацепления и для
внешнего осмотра деталей сделан люк.
Крышка люка сделана из листа толщиной кδ методом «штамповка».
Размеры люка:
ммммLк 207,3..56,2256)012,0...010,0()012,0...010,0( ≥=⋅=⋅=δ ,
принимаем ммк 3=δ ;
LH ⋅≥ 05,0 , ммH 25605,0 ⋅≥ , ммН 8,12≥ ;
высота прилива: ммh 5,3...8,27)5,0...4,0()5,0...4,0( 11 =⋅=⋅= δ ;
диаметр винтов крепления крышки люка: ммd 71 ≈≈ δ , принимаем
ммd 6= .
Для того чтобы внутрь корпуса извне не засасывалась пыль, под
крышку поставлена уплотняющая прокладка из технической резины марки
МБС толщиной 2 мм, привулканизированная к крышке.

77
7.3 Конструирование корпусов и крышек опор приводного вала
Два корпуса типа 1, исполнение 1, ммD 110= : Корпус ШМ 110 ГОСТ
13218.1-80.
Три низкие торцевые крышки с манжетным уплотнением и одна глухая
диаметром ммD 110= , ммd ном 60= : Крышка МН 60110× ГОСТ 13219.6-81.

78
8. Расчет валов на статическую прочность и сопротивление
усталости
Материал всех валов – Сталь 45, ⇒ МПаМПа ТТ 390;650 == τσ .
8.1 Быстроходный вал
8.1.1 Расчет валов на статическую прочность
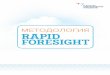
I
I I I
I I
I I I
I I I
Ç
3
0
k
5
Ç
3
8
,
6
4
4
F r
F a
F t
1 2 1 0 4 7 6
1 5 2 F t = 2 2 0 9 , 8 Н
R 1 Г = 1 5 1 2 Н R 2 Г = 6 9 7 , 8 Н
М 1 Г = 7 2 , 6 Н • м
F a = 4 0 8 , 6 Н F r = 8 1 7 , 9 Н
R 2 В = 2 0 6 , 3 Н R 1 В = 6 1 1 , 6 Н
М 1 в л = 2 9 , 4 Н • м М 1 в п = 2 1 , 5 Н • м
F к = 8 2 0 , 6 Н R 1 к = 4 1 0 , 3 Н
R 1 к = 1 2 3 0 , 9 Н
М 2 к о н = 6 2 , 4 Н • м М 1 к о н = 1 9 , 7 Н • м
F a = 4 0 8 , 6 Н
М к = 4 3 , 1 Н • м
Ç
2
6

79
Самым опасным сечением будет сечение I-I .
Моменты сопротивления при изгибе, при кручении и площадь
Для сплошного круглого сечения:
.4
;16
;32
233 DADWDW к⋅
=⋅
=⋅
=πππ
22
13
13
3
1 29,11724
644,3814,3;46,11325;73,566232
644,3814,3 ммАммWммW к =⋅
===⋅
=
22
23
23
3
2 86,7064
644,3814,3;44,5301;72,265032
3014,3 ммАммWммW к =⋅
===⋅
= .
Для сечения со шпоночным пазом:
.24
;16
)2(16
;16
)2(32
22323 hbdAd
hdhbdWd
hdhbdW к⋅
−⋅
=⋅
−⋅⋅⋅−
⋅=
⋅−⋅⋅⋅
−⋅
=πππ
.93,502278
42614,3
;44,31782616
)7262(7816
2614,3
;92,14522616
)7262(7832
2614,3
22
3
323
3
323
3
ммА
ммW
ммW
к
=⋅
−⋅
=
=⋅
−⋅⋅⋅−
⋅=
=⋅
−⋅⋅⋅−
⋅=
Нормальные и касательные напряжения:
AF
WМ maxmax
310+
⋅=σ ;
к
к
WM max
310 ⋅=τ ,
где )( 22max конyxП MMMKM ++⋅= - суммарный изгибающий момент,
здесь 2,2=ПK - коэффициент перегрузки;
ТKTМ Пк ⋅== maxmax - крутящий момент, aП FKF ⋅=max - осевая сила.

80
Напряжения сечении:
( ) ( )МПа85,38
29,11726,4082,2
73,5662
7,194,296,722,210 223
=⋅
+
++⋅⋅
=σ ;
МПа29,846,11325
1,432,2103
=⋅⋅
=τ .
Частные коэффициенты прочности по нормальным и касательным
напряжениям:
;73,1685,38/650/ === σσσ TTS 04,4729,8/390/ === τττ TTS .
Общий коэффициент запаса прочности по пределу текучести при
совместном действии нормальных и касательных напряжений:
.76,1504,4773,16
04,4773,162222
=+
⋅=
+
⋅=
τσ
τσ
TT
TTT
SS
SSS

81
8.2 Промежуточный вал
Ç
3
0
k
6
F r 2
F a 2
F t 2
F r 1
F t 1
F a 1
I
I
I I
I I
2 1 4 8 5 0
1 5 2
F t 1 = 7 1 9 6 , 3 Н F t 2 = 2 2 0 9 , 8 Н
Ç
6
0
,
5
9
4
Ç
2
0
1
,
3
5
6
R 2 Г = 5 5 2 6 , 9 Н R 1 Г = 3 8 7 9 , 2 Н
М 1 Г = 1 8 6 , 2 Н • м М 2 Г = 2 7 6 , 3 Н • м
F r 1 = 2 6 6 7 , 4 Н
F a 1 = 1 3 8 6 , 3 Н
F a 2 = 4 0 8 , 6 Н
F r 2 = 8 1 7 , 9 Н
R 2 В = 1 2 7 0 , 6 Н R 1 В = 8 5 8 , 9 Н
М 1 Г = 1 8 6 , 2 Н • м М 1 Г = 1 8 6 , 2 Н • м
М к = 2 2 2 , 5 Н • м
F a 2 = 4 0 8 , 6 Н F a 1 = 1 3 8 6 , 3 Н

82
Самым опасным сечением будет сечение II-II .
Моменты сопротивления при изгибе, при кручении и площадь
Для сплошного круглого сечения:
.4
;16
;32
233 DADWDW к⋅
=⋅
=⋅
=πππ
22
23
23
3
2 23,28824
594,6014,3;63,43683;82,2184132
594,6014,3 ммАммWммW к =⋅
===⋅
=
Нормальные и касательные напряжения:
AF
WМ maxmax
310+
⋅=σ ;
к
к
WM max
310 ⋅=τ ,
где )( 22max yxП MMKM +⋅= - суммарный изгибающий момент, здесь
2,2=ПK - коэффициент перегрузки;
ТKTМ Пк ⋅== maxmax - крутящий момент, aП FKF ⋅=max - осевая сила.
тогда напряжения в этом сечении:
( ) ( )МПа62,34
23,28823,13862,2
82,21841
2,1863,2762,210 223
=⋅
+
+⋅⋅
=σ ;
МПа21,1136,43683
5,2222,2103
=⋅⋅
=τ .
Частные коэффициенты прочности по нормальным и касательным
напряжениям:
;78,1862,34/650/ === σσσ TTS 79,3421,11/390/ === τττ TTS .

83
Общий коэффициент запаса прочности по пределу текучести при
совместном действии нормальных и касательных напряжений:
.53,1679,3478,18
79,3478,182222
=+
⋅=
+
⋅=
τσ
τσ
TT
TTT
SS
SSS
8.3 Тихоходный вал
Ç 7
1 H
8
/
x
8
Ç 6
0
k
6
Ç 6
0
k
6
d - 8 • 4 6 f 7 • 5 4 • 9 f 8 Г О С Т 1 1 3 9 - 8 0
F r
F a F t
I
I
I I
I I
I I I
I I I
1 2 9 8 1 0 5
1 5 9
F t = 7 1 9 6 , 3 Н
R 1 Г = 2 4 4 4 Н R 2 Г = 4 7 5 2 , 3 Н М 1 Г = 2 5 6 , 6 Н • м
F r = 2 6 6 7 , 4 Н F a = 1 3 8 6 , 3 Н
F к = 8 2 0 5 , 6 Н
2
9
9
,
4
0
6
R 2 В = 4 5 6 , 2 Н R 1 В = 2 2 1 1 , 2 Н М 1 в л = 2 3 2 , 2 Н • м М 1 в п = 2 4 , 6 Н • м
R 2 к = 5 0 5 7 , 5 Н
R 2 к = 1 0 4 7 6 , 3 Н
М 2 к = 8 0 4 , 1 Н • м М 1 к = 2 7 3 , 1 Н • м
F a = 1 3 8 6 , 3 Н
М к = 1 0 7 7 , 3 Н • м

84
Самым опасным сечением будет сечение I-I .
Моменты сопротивления при изгибе, при кручении и площадь
Для сплошного круглого сечения:
.4
;16
;32
233 DADWDW к⋅
=⋅
=⋅
=πππ
22
13
13
3
1 19,39594
7114,3;66,70275;83,3513732
7114,3 ммАммWммW к =⋅
===⋅
= .
Нормальные и касательные напряжения:
AF
WМ maxmax
310+
⋅=σ ;
к
к
WM max
310 ⋅=τ ,
где )( 22max конyxП MMMKM ++⋅= - суммарный изгибающий момент,
здесь 2,2=ПK - коэффициент перегрузки;
ТKTМ Пк ⋅== maxmax - крутящий момент, aП FKF ⋅=max - осевая сила.
тогда напряжения в этом сечении:
( ) ( )МПа54,39
19,39593,13862,2
83,35137
1,2732,2326,2562,210 223
=⋅
+
++⋅⋅
=σ ;
МПа73,3366,70275
3,10772,2103
=⋅⋅
=τ .
Частные коэффициенты прочности по нормальным и касательным
напряжениям:
;44,1654,39/650/ === σσσ TTS 56,1173,33/390/ === τττ TTS .

85
Общий коэффициент запаса прочности по пределу текучести при
совместном действии нормальных и касательных напряжений:
.46,956,1144,16
56,1144,162222
=+
⋅=
+
⋅=
τσ
τσ
TT
TTT
SS
SSS

86
9. Выбор смазочных материалов и системы смазывания
Для смазывания передач широко применяют картерную систему. В
корпус редуктора заливают масло так, чтобы венцы колес были в него
погружены. Колеса при вращении увлекают масло, разбрызгивая его внутри
корпуса. Масло попадает на внутренние стенки корпуса, откуда стекает в
нижнюю его часть. Внутри корпуса образуется взвесь частиц масла в
воздухе, которая покрывает поверхность расположенных внутри корпуса
деталей. В нашем случае необходимо, чтобы в масляную ванну были
погружены зубчатые колеса обеих передач.
Допустимый уровень погружения колеса быстроходной ступени в
масляную ванну:
ммdmh Tм 51...4)25,0...2( 21 =⋅⋅≈
Допустимый уровень погружения колеса тихоходной ступени в
масляную ванну:
ммdmh Tм 76...7)25,0...2( 22 =⋅⋅≈
Погружаем колесо тихоходной ступени на 64 мм, тогда соответственно
колесо быстроходной ступени погрузится в масло на 14,5 мм.
Требуемый объем масла будет равен примерно равен
лммммммммV 0110279000100415901 3 ≈=⋅⋅≈ л. Принцип назначения сорта масла
следующий: чем выше окружная скорость колеса, тем меньше должна быть
вязкость масла и чем выше контактные давления в зацеплении, тем большей
вязкостью должно обладать масло. Поэтому требуемую вязкость масла
определяют в зависимости от контактного напряжения и окружной скорости
колес. Контактные напряжения быстроходной ступени σНБ = 552,9 МПа.

87
)1(1062
4 +⋅⋅⋅⋅⋅
=u
nаV π ,
где а=120мм - межосевое расстояние быстроходной ступени ступени;
u=5,211 – передаточное число ступени;
n=950 1−мин – число оборотов.
смV /922,1)1211,5(106
95012014,324 =
+⋅⋅⋅⋅⋅
= .
При t=40oC, определяем кинематическую вязкость К=34мм2/с. По
кинематической вязкости назначаем масло И-Г-А-32.
Для смазывания упругой муфты используется ПСМ Литол-24, такой же
материал используется для смазки подшипников приводного вала.

88
10. Расчет муфт
Для соединения входного вала редуктора с волом электродвигателя
назначаем компенсирующую зубчатую муфту с неметаллической обоймой
ГОСТ 5006-83.
Для соединения выходного вала редуктора с валом электродвигателя
используем упруго-предохранительную муфту со стальными стержнями и с
разрушающимся элементом.
10.1 Подбор и проверочный расчет упругой муфты
Вращающий момент нагружающий муфту в приводе:
Tк ТKТ ⋅= ,
где К - коэффициент режима работы.
При спокойной работе и небольших разгоняемых массах 4,1...1,1=K .
Принимаем 1,1=K , тогда мНТ к ⋅=⋅= 03,11853,10771,1 .
Муфта будет с переменной жесткостью.
При проектировании муфты принимаем:
48,190...73,158)18...15( 30 =⋅= кTD . Принимаем ммD 1600 = .
Диаметр самой муфты ммDD 192...184160)20,1...15,1()20,1...15,1( 0 =⋅=⋅= .
Принимаем ммD 190= .
ммDDS 2,43...6,41160)27,0...26,0()27,0...26,0( 00 =⋅=⋅=⋅= ξ , S – расстояние от
средней плоскости муфты до точки начала контакта стержня с полумуфтой
при отсутствии нагрузки. Принимаем ммS 42= .
ммSlc 8,100424,24,2 =⋅=⋅= - длина стержня.

89
Диаметр стержней:
[ ]ϕ
ψξσ⋅⋅
−⋅⋅⋅⋅=
EDd и
c 3)3(4 22
0 ,
где Е – модуль упругости стали, Е=2,15.105МПа;
Sа
=ψ , где а - расстояние от средней плоскости муфты до точки начала
контакта стержня с полумуфтой при передаче нагрузки. Т.к. муфта с
переменной жесткостью, то )7,0...6,0(=ψ ;
рад035,0=ϕ - угол относительного поворота полумуфт.
Выбираем материал стержней – 65С2ВА, допускаемое напряжение
которой [ ] МПаи 1330=σ .
⇒ ммdc 4,6035,01015,23
)7,03(26,0160133045
22
=⋅⋅⋅
−⋅⋅⋅⋅= .
Из ряда номинальных линейных размеров выбираем диаметр стержней
ммdc 3,6= .
Число стержней:
[ ]2,12
3,6133014,303,11857,026,010641064
3
3
3
3
=⋅⋅
⋅⋅⋅⋅=
⋅⋅⋅⋅⋅⋅
=cи d
Tzσπ
ψξ ,
принимаем 12=z .
Радиус кривизны гнезда в осевом сечении:
ммdE
и
c 21,50913302
3,61015,2][2
5
=⋅
⋅⋅=
⋅⋅
=σ
ρ .

90
10.2 Расчет и конструирование предохранительной муфты
При расчете предохранительной муфты во избежание случайных
выключений за расчетный вращающий момент принимаем:
мНTT T ⋅=⋅=⋅= 63,13463,107725,125,1 .
Диаметр штифта(предохранительного элемента):
2/18
⋅⋅⋅
⋅⋅=
DzkT
dв
пр
τπ,
где z – количество штифтов, принимаем z=2;
k – коэффициент неравномерности распределения нагрузок на штифт,
при z=2 k=1,2;
мD 234,0= - диаметр окружности расположения штифтов;
вв στ ⋅= )8,0...7,0( - предел прочности штифта на срез, здесь вσ - предел
прочности материала штифта на растяжение.
Выбираем материал штифта – Сталь 45, тогда ,900МПав =σ а
МПав 720...630900)8,0...7,0( =⋅=τ .
⇒ ммd 85,3234,0630214,32,163,13468
2/1
=
⋅⋅⋅⋅⋅
= , принимаем ммd 8,3= .
В момент срабатывания (при перегрузке) штифт разрушается, и
предохранительная муфта разъединяет кинематическую цепь.

91
Список использованных источников
v М.Н. Иванов. Детали машин. М.: «Машиностроение», 1991.
v П.Ф. Дунаев, О.П.Леликов – Конструирование узлов и деталей машин.
М.: «Высшая школа», 1985.
v Д.Н. Решетов – Детали машин. Атлас конструкций в двух частях. М.:
«Машиностроение», 1992.
v Тибанов В.П., Варламова Л.П. Методические указания к выполнению
домашнего задания по разделу «Cоединения». М., МГТУ им. Н.Э. Баумана,
1999.