Embed Size (px)
Citation preview

SINUMERIK 802D sl
선삭 가공(Turning) 조작 및 프로그램 설명서 해당 제품
제어 시스템 소프트웨어 버전 SINUMERIK 802D sl 1.2 2006년 10월판
소개 1
전원 켜기 및 원점 복귀 2
설정 3
수동 제어 모드 4
자동 모드 5
가공 프로그램 작성 6
시스템 7
프로그래밍 8
싸이클 9

안전 정보
이 설명서에는 개인 안전을 유지하고 장비 손상을 방지하기 위해 준수해야 하는 정보가 수록되어 있습니다. 개인 안전에 관한 안전 수칙은 안전 경고 기호로 강조되어 있으며, 장비 손상에만 해당되는 안전 주의 사항은 경고 기호 없이 설명됩니다. 안전 수칙 및 주의 사항은 위험 정도에 따라 다음과 같이 표시됩니다.
!위험!
적절한 예방 조치를 수행하지 않을 경우 사망 또는 심각한 부상을 초래할 것임을 나타냅니다.
!경고!
적절한 예방 조치를 취하지 않으면 사망 또는 심각한 부상을 초래할 수 있음을 나타냅니다.
!
주의
해당 안전 방법을 따르지 않을 경우 부상을 당할 수 있음을 나타냅니다.
주의
안전 경고 표시는 없지만 적절한 예방 조치를 취하지 않으면 장비가 손상될 수 있음을 나타냅니다.
주의
관련 지침을 준수하지 않으면 원치 않는 사건이나 상황이 발생할 수 있음을 나타냅니다.
다양한 위험 수준이 발생할 수 있는 경우 경고는 항상 최고 수준으로 표시됩니다. 삼각형 모양의 경고 기호가 표시된
경고 정보가 부상을 나타내는 경우 동일한 경고에 자산 손상에 대한 정보도 포함될 수 있습니다.
유자격 기술자 해당 장치/장비/시스템의 시동 및 작동은 반드시 이 설명서를 참조하여 수행해야 합니다. 유자격자에 한하여
장치/시스템을 스타트업 및 작동할 수 있습니다. 이 설명서의 안전 지침에 나오는 유자격 기술자는 관련 안전 표준에
따라 장치, 시스템 및 회로를 시작, 접지 및 레이블링할 수 있는 권한을 가진 공인된 기술자를 말합니다.
올바른 사용 다음 정보를 읽어 주십시오.
!경고
이 기기는 카탈로그 또는 기술 설명에 설명된 용도로만 사용할 수 있으며, Siemens에서 권장하거나 허가하는 타 제조업체에서 공급하는 장비, 구성품 및 장치에서만 함께 사용할 수 있습니다. 이 제품은 제품을 권장하는 대로 운반, 보관 및 설치하고 운영 및 관리할 경우에만 올바르고 안전하게 작동할 수 있습니다.
상표 등록 상표 ®이 표시된 모든 이름은 Siemens AG의 상표입니다. 그 밖의 이름은 해당 소유자의 등록상표일 수
있으며, 개인적인 용도로 사용할 경우 소유권자의 권리를 침해하는 결과가 발생할 수도 있습니다.
책임의 부인 Siemens에서는 이 출판물의 내용이 설명된 하드웨어 및 소프트웨어와 일치함을 확인했습니다. 하지만 예외가 있을
수도 있으므로 완전한 일치를 보장할 수는 없습니다. 이 책에 수록된 정보는 정기적으로 검토되며 필요한 수정 사항은 추후 버전에 반영됩니다.
Siemens AG Automation and Drives Postfach 48 48 90437 NÜRNBERG GERMANY
Copyright © Siemens AG 2006. 6FC5398-1CP10-2LA0 Siemens AG 2006 사전 예고 없이 변경될 수 있습니다.

iii SINUMERIK 802D sl 선삭 가공 조작 및 프로그램 설명서(BP-D), 2006년 10월판 6FC5398-1CP10-2LA0
서문
SINUMERIK 출판물
SINUMERIK 출판물은 다음과 같이 세 범주로 구성됩니다.
● 일반 설명서:
● 사용자 안내서
● 제조업체/서비스 관련 설명서:
제공되는 다양한 언어 버전에 대한 정보를 제공하며 매월 업데이트되는 출판물에 대한 개요
는 다음 인터넷 사이트에서 확인할 수 있습니다.
http://www.siemens.com/motioncontrol
“Support(지원)”, “Technical Documentation(기술 설명서)”, “Overview of Publications(출판
물)” 메뉴 항목을 차례대로 선택하십시오.
DOConCD 인터넷 버전(DOConWEB)은 다음 웹 사이트에서 제공합니다.
http://www.automation.siemens.com/doconweb
교육 과정 및 FAQ(질문과 대답)에 대한 정보는 다음 웹 사이트에서 제공합니다.
http://www.siemens.com/motioncontrol(“Support(지원)” 메뉴 옵션 참조)
대상 그룹
이 설명서는 기계 공구 제조업체를 대상으로 합니다. 제조업체에서 SINUMERIK 802D sl CNC를 스타트업하는 데 필요한 모든 정보를 제공합니다.
표준 범위
현재 조작 설명서에는 표준 범위의 기능이 설명되어 있습니다. 장비 제조업체가 수행한 장비 추가 또는 개조 내용은 제조업체에서 문서로 기록합니다.
이 설명서에 수록되지 않은 그 밖의 기능을 시스템에서 지원할 수도 있습니다. 하지만 장비가 처음 공급되거나 수리 시 이러한 기능의 가용성에 관해 어떠한 요구도 할 수 없습니다.

서문
iv SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
기술 지원
의문 사항이 있으면 다음 직통 전화를 통해 문의하십시오.
유럽/아프리카 아시아/호주 미국
전화 +49 180 5050 222 +86 1064 719 990 +1 423 262 2522
팩스 +49 180 5050 223 +86 1064 747 474 +1 423 262 2289
인터넷 http://www.siemens.com/automation/support-request
이메일 mailto:[email protected]
참고
국가별 기술 지원 전화 번호는 다음 인터넷 주소에서 제공합니다. http://www.siemens.com/automation/service&support
설명서 관련 문의
설명서에 관한 질문 사항이나 제안 또는 수정 사항은 다음 팩스 번호 또는 이메일 주소로 보내 주십시오. 팩스: +49 9131 98 63315 이메일: mailto:[email protected]
팩스 양식: 설명서 맨 뒤에 있는 양식을 참조하십시오.
인터넷 주소
http://www.siemens.com/sinumerik
EC 적합성 선언
EC 지침에 관한 EU 적합성 선언은 다음 경로를 통해 볼 수 있습니다.
인터넷: http://www.ad.siemens.de/csinfo
제품/주문 번호 15257461
Siemens AG의 A&D MC 사업부 산하 관련 사무소
목차
v SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
목차
1 소개 ................................................................................................................................................. 1-11
1.1 화면 레이아웃 ................................................................................................................................. 1-11
1.2 조작 영역 ........................................................................................................................................ 1-15
1.3 가용성 옵션..................................................................................................................................... 1-16 1.3.1 계산기............................................................................................................................................. 1-16 1.3.2 형상 요소 정렬 ................................................................................................................................ 1-18 1.3.3 중국어 문자 편집............................................................................................................................. 1-22 1.3.4 단축 키............................................................................................................................................ 1-22 1.3.5 파일 복사 및 붙여넣기 .................................................................................................................... 1-23
1.4 도움말 시스템 ................................................................................................................................. 1-23
1.5 네트워크 작업(옵션)........................................................................................................................ 1-25 1.5.1 네트워크 연결 구성 ......................................................................................................................... 1-25 1.5.2 사용자 관리..................................................................................................................................... 1-28 1.5.3 사용자 로그인 – RCS 로그인 .......................................................................................................... 1-29 1.5.4 네트워크 연결 작업 ......................................................................................................................... 1-30 1.5.5 디렉토리 공유 ................................................................................................................................. 1-30 1.5.6 네트워크 드라이브 연결/해제.......................................................................................................... 1-31
1.6 RCS 도구 ........................................................................................................................................ 1-34
1.7 좌표계............................................................................................................................................. 1-35
2 전원 인가 및 원점 복귀 .................................................................................................................... 2-39
3 설정 ................................................................................................................................................. 3-41 3.1 공구 및 공구 옵셋 입력 ................................................................................................................... 3-41 3.1.1 새 공구 작성.................................................................................................................................... 3-43 3.1.2 공구 옵셋 수동 측정 ........................................................................................................................ 3-44 3.1.3 프로브를 사용하여 공구 측정.......................................................................................................... 3-47 3.1.4 광학 계측기를 사용하여 공구 측정.................................................................................................. 3-48 3.1.5 프로브 설정..................................................................................................................................... 3-48
3.2 워크 옵셋 입력/수정 ........................................................................................................................ 3-51 3.2.1 워크 옵셋 결정 ................................................................................................................................ 3-52
3.3 셋팅 데이터 프로그램 – “파라메타” 조작 영역 ................................................................................ 3-53
3.4 R 파라메타 – “Offset/Parameter(옵셋/파라메타)” 조작 영역 ........................................................... 3-56
4 수동 제어 모드 ................................................................................................................................. 4-57 4.1 조그 모드 – “기계좌표” 조작 영역 ................................................................................................... 4-58 4.1.1 핸드휠 지정..................................................................................................................................... 4-61
4.2 MDA 모드(수동 입력) – “기계좌표” 조작 영역 ................................................................................. 4-62 4.2.1 단면 선삭 가공 ................................................................................................................................ 4-65
5 자동 모드 ......................................................................................................................................... 5-69
5.1 가공 프로그램 선택/시작 – “기계좌표” 조작 영역 ............................................................................ 5-73
5.2 블록 검색 – “기계좌표” 조작 영역 ................................................................................................... 5-75
5.3 가공 프로그램 중지/취소................................................................................................................. 5-76
5.4 취소 후 재실행 ................................................................................................................................ 5-77
5.5 중단 후 위치 재지정 ........................................................................................................................ 5-77
5.6 외부 실행 ........................................................................................................................................ 5-78

목차
vi SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
6 가공 프로그램 작성.......................................................................................................................... 6-79
6.1 새 프로그램 입력 – “프로그램” 조작 영역 ........................................................................................6-82
6.2 가공 프로그램 편집 – “프로그램” 조작 영역 ....................................................................................6-83
6.3 형상 정의 프로그래밍......................................................................................................................6-85
6.4 모의가공........................................................................................................................................6-104
6.5 RS232 인터페이스를 통한 데이터 전송.........................................................................................6-105
7 시스템............................................................................................................................................ 7-107
7.1 시스템 소프트 키 - 스타트업 .........................................................................................................7-110
7.2 시스템 소프트 키 (MD) ..................................................................................................................7-111
7.3 시스템 소프트 키 - 서비스 화면 ....................................................................................................7-116
7.4 시스템 소프트 키 - PLC.................................................................................................................7-125
7.5 시스템 소프트 키 - 스타트업 파일 .................................................................................................7-127
7.6 스타트업 백업 파일 생성/불러오기/저장........................................................................................7-131
7.7 PLC 프로젝트 불러오기/저장 ........................................................................................................7-134
7.8 래더 다이어그램으로 표시되는 PLC 진단 .....................................................................................7-135 7.8.1 화면 레이아웃 ...............................................................................................................................7-135
7.9 알람 표시.......................................................................................................................................7-146
8 프로그래밍..................................................................................................................................... 8-147
8.1 NC 프로그램 작성의 기본 원칙 .....................................................................................................8-147 8.1.1 프로그램 이름 ...............................................................................................................................8-147 8.1.2 프로그램 구조 ...............................................................................................................................8-147 8.1.3 워드 구조 및 주소 ..........................................................................................................................8-148 8.1.4 블록 구조.......................................................................................................................................8-149 8.1.5 문자 세트.......................................................................................................................................8-150 8.1.6 명령 목록.......................................................................................................................................8-152
8.2 위치 데이터 ...................................................................................................................................8-165 8.2.1 치수 프로그램 ...............................................................................................................................8-165 8.2.2 절대/증분 치수 기입: G90, G91, AC, IC ........................................................................................8-167 8.2.3 미터 및 인치 단위 치수: G71, G70, G710, G700...........................................................................8-168 8.2.4 반경/직경 치수 표기: DIAMOF, DIAMON ......................................................................................8-169 8.2.5 프로그램 가능한 워크 옵셋: TRANS, ATRANS .............................................................................8-170 8.2.6 프로그램 가능 배율 팩터: SCALE, ASCALE .................................................................................8-172 8.2.7 공작물 클램핑 - 설정 가능한 워크 옵셋: G54 ~ G59, G500, G53, G153 .......................................8-173 8.2.8 프로그램 가능 작업 영역 제한: G25, G26, WALIMON, WALIMOF................................................8-174
8.3 축 이송 ..........................................................................................................................................8-177 8.3.1 급 이송을 이용한 선형 보간: G0....................................................................................................8-177 8.3.2 피드 G1 을 이용한 선형 보간 G1...................................................................................................8-178 8.3.3 원형 보간: G2, G3 .........................................................................................................................8-179 8.3.4 중간점 CIP 를 통과하는 호 보간 CIP.............................................................................................8-183 8.3.5 접선 전이를 사용한 원: CT ............................................................................................................8-183 8.3.6 연속 리드를 사용하여 나사 절삭: G33...........................................................................................8-184 8.3.7 G33 에 대한 프로그램 가능 런인 및 런아웃 경로: DITS, DITE ......................................................8-187 8.3.8 가변 리드를 사용하여 나사 절삭: G34, G35 ..................................................................................8-188 8.3.9 나사 보간: G331, G332 .................................................................................................................8-189 8.3.10 고정점 접근: G75 ..........................................................................................................................8-191 8.3.11 원점 복귀: G74..............................................................................................................................8-191 8.3.12 터치 프로브를 사용한 측정: MEAS, MEAW ..................................................................................8-192

목차
vii SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.3.13 피드 F ........................................................................................................................................... 8-193 8.3.14 정위치 정지/연속 경로 제어 모드: G9, G60, G64.......................................................................... 8-194 8.3.15 가속 패턴: BRISK, SOFT.............................................................................................................. 8-196 8.3.16 가속 오버라이드율: ACC .............................................................................................................. 8-197 8.3.17 피드포워드 제어를 이용한 이송: FFWON, FFWOF ...................................................................... 8-198 8.3.18 3 번째 및 4 번째 축 ....................................................................................................................... 8-199 8.3.19 드웰 시간: G4 ............................................................................................................................... 8-200 8.3.20 고정 정지점로 이동 ....................................................................................................................... 8-200
8.4 스핀들 이동................................................................................................................................... 8-204 8.4.1 스핀들 속도 S, 회전 방향 .............................................................................................................. 8-204 8.4.2 스핀들 속도 제한: G25, G26 ......................................................................................................... 8-204 8.4.3 스핀들 위치 지정: SPOS............................................................................................................... 8-205 8.4.4 기어단........................................................................................................................................... 8-206 8.4.5 2 번째 스핀들................................................................................................................................ 8-206
8.5 특수 회전 기능 .............................................................................................................................. 8-208 8.5.1 주속 일정 제어: G96, G97............................................................................................................. 8-208 8.5.2 라운딩, 모따기 .............................................................................................................................. 8-210 8.5.3 형상 정의 프로그래밍 ................................................................................................................... 8-213
8.6 공구와 공구 보정........................................................................................................................... 8-215 8.6.1 공구 T ........................................................................................................................................... 8-215 8.6.2 공구 보정 번호 D........................................................................................................................... 8-216 8.6.3 공구 반경 보정 선택: G41, G42 .................................................................................................... 8-220 8.6.4 형상 동작: G450, G451................................................................................................................. 8-222 8.6.5 공구 반경 보정 OFF: G40 ............................................................................................................. 8-223 8.6.6 공구 반경 보정의 특수한 경우....................................................................................................... 8-224 8.6.7 공구 반경 보정 예.......................................................................................................................... 8-225 8.6.8 밀링 커터 사용 .............................................................................................................................. 8-226 8.6.9 공구 보정의 특수 처리 .................................................................................................................. 8-228
8.7 기타 기능(M)................................................................................................................................. 8-229
8.8 H 기능........................................................................................................................................... 8-230
8.9 산술 파라메타 R, LUD 및 PLC 변수.............................................................................................. 8-231 8.9.1 산술 파라메타 R............................................................................................................................ 8-231 8.9.2 LUD(로컬 사용자 데이터) ............................................................................................................. 8-233 8.9.3 PLC 변수 읽기 및 쓰기.................................................................................................................. 8-234
8.10 프로그램 점프 ............................................................................................................................... 8-235 8.10.1 프로그램 점프를 위한 점프 대상 ................................................................................................... 8-235 8.10.2 비조건식 프로그램 점프................................................................................................................ 8-235 8.10.3 조건식 프로그램 점프 ................................................................................................................... 8-236 8.10.4 점프 프로그램 예........................................................................................................................... 8-238
8.11 서브루틴 기법 ............................................................................................................................... 8-239 8.11.1 일반 .............................................................................................................................................. 8-239 8.11.2 가공 싸이클 호출........................................................................................................................... 8-241
8.12 타이머와 공작물 카운터................................................................................................................ 8-242 8.12.1 런타임 타이머 ............................................................................................................................... 8-242 8.12.2 공작물 카운터 ............................................................................................................................... 8-243
8.13 공구 모니터링을 위한 언어 명령 ................................................................................................... 8-245 8.13.1 공구 모니터링 개요 ....................................................................................................................... 8-245 8.13.2 공구 수명 모니터링 ....................................................................................................................... 8-246 8.13.3 공작물 수량 모니터링 ................................................................................................................... 8-247
8.14 선삭 가공 기계에서의 밀링 ........................................................................................................... 8-250 8.14.1 전면 밀링 - TRANSMIT................................................................................................................. 8-250 8.14.2 주변 표면 밀링 - TRACYL............................................................................................................. 8-252

목차
viii SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9 싸이클............................................................................................................................................ 9-259
9.1 싸이클 개요 ...................................................................................................................................9-259
9.2 싸이클 프로그래밍 ........................................................................................................................9-260
9.3 프로그램 편집기에서 그래픽 싸이클 지원 .....................................................................................9-262
9.4 드릴링 싸이클 ...............................................................................................................................9-264 9.4.1 일반...............................................................................................................................................9-264 9.4.2 요구 사항.......................................................................................................................................9-265 9.4.3 드릴링, 센터링 – CYCLE81...........................................................................................................9-268 9.4.4 드릴링, 카운터보링 – CYCLE82- CYCLE82 .................................................................................9-271 9.4.5 심공 드릴링 – CYCLE83 ...............................................................................................................9-273 9.4.6 리지드 태핑 – CYCLE84 ...............................................................................................................9-277 9.4.7 보정 척을 사용한 태핑 – CYCLE840.............................................................................................9-280 9.4.8 리밍 1(보링 1) – CYCLE85 ...........................................................................................................9-286 9.4.9 보링(보링 2) – CYCLE86 ..............................................................................................................9-289 9.4.10 정지 1 을 사용한 보링(보링 3) – CYCLE87 ...................................................................................9-293 9.4.11 정지 2 를 사용한 드릴링(보링 4) – CYCLE88 ...............................................................................9-295 9.4.12 리밍 2 (보링 5) – CYCLE89 ..........................................................................................................9-297 9.4.13 여러 구멍으로 이루어진 행 – HOLES1..........................................................................................9-299 9.4.14 여러 구멍으로 이루어진 원 – HOLES2..........................................................................................9-304
9.5 선삭 가공 싸이클 ...........................................................................................................................9-308 9.5.1 요구 사항.......................................................................................................................................9-308 9.5.2 홈 – CYCLE93 ..............................................................................................................................9-310 9.5.3 언더컷(DIN 에 대한 E 및 F 형태) – CYCLE94...............................................................................9-319 9.5.4 릴리프 절삭을 사용한 절삭 – CYCLE95........................................................................................9-325 9.5.5 나사 언더컷 – CYCLE96 ...............................................................................................................9-338 9.5.6 나사 절삭 – CYCLE97...................................................................................................................9-343 9.5.7 체인 나사 – CYCLE98...................................................................................................................9-350
9.6 에러 메시지와 에러 처리 ...............................................................................................................9-357 9.6.1 일반 사항.......................................................................................................................................9-357 9.6.3 싸이클 알람 개요 ...........................................................................................................................9-357 9.6.4 싸이클 메시지 ...............................................................................................................................9-359

CNC 키보드의 키 정의(수직형 키보드)
ix SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
CNC 키보드의 키 정의(수직형 키보드)
삭제 키(백스페이스)
삭제 키
삽입 키
탭 키
ENTER /Input 키
“기계좌표” 조작 영역 키
“프로그램” 조작 영역 키
“파라메타” 조작 영역
“프로그램 관리자” 조작 영역 키
&
“알람/시스템” 조작 영역
메뉴복귀 키
할당되지 않음
메뉴확장 키
페이지 업/다운 키
“알람 취소” 키 기능 없음
커서 키
도움말 키
선택/토글 키
Shift 키
Ctrl 키
문자/숫자 키 쉬프트 키에 의한 할당 변경
Alt 키
숫자 키 쉬프트 키에 의한 할당 변경
스페이스

기계 조작반의 키 정의
x SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
기계 조작반의 키 정의
사용자 정의 키(LED 사용)
사용자 정의 키(LED 사용 안 함)
증분이송 모드
조그 모드
원점 복귀
자동 모드
싱글 블록
MDA 모드
스핀들 CCW 회전
스핀들 정지
스핀들 CW 회전
급이송
급이송 오버라이드
리셋
X 축
NC 정지
Z 축
NC 시작
피드 오버라이드 피드 제어
비상정지
스핀들 오버라이드
%
%

1-11 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
소개
1.1 화면 레이아웃
Status area
Application area
Tip and softkey area
그림 1-1 화면 레이아웃
다음의 주요 영역으로 화면이 나뉩니다.
• 상태 영역
• 애플리케이션 영역
• 팁 및 소프트 키 영역
1
애플리케이션 영역
상태 영역
팁 및 소프트 키
영역

소개
1.1 화면 레이아웃
1-12 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
상태 영역
그림 1-2 상태 영역
표 1-1 개별 데이터 영역의 화면표시 필터
화면 항목 디스플레이 의미
1
활성 조작 영역, 활성 모드
기계 좌표
JOG: 1 INC, 10 INC, 100 INC, 1000 INC, VAR INC(조그 모드에서 증분 이송)
MDA AUTOMATIC
OFFSET PARAM
PROGRAM
PROG MANAGER
SYSTEM
ALARM
G291을 사용하여 “외부 언어”로 표시됨
2
알람 및 메시지 행
다음과 같은 정보도 표시됩니다.
1. 알람 텍스트를 포함한 알람 번호 또는
2. 메시지 텍스트
프로그램 상태
리셋 프로그램 취소/기본 상태
RUN 프로그램 실행 중 3
STOP 프로그램 중지
4
자동 모드에서 프로그램 제어
5
예약됨
6
NC 메시지
7
선택된 가공 프로그램(메인 프로그램)

소개
1.1 화면 레이아웃
1-13 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
팁 및 소프트 키 영역
그림 1-3 팁 및 소프트 키 영역
표 1-2 팁과 소프트 키 영역에서의 화면 제어에 대한 설명
화면 항목 디스플레이 의미
1 메뉴 복귀 기호
<메뉴 복귀> 키를 누르면 다음 상위 단계 메뉴로 돌아갑니다.
2
팁 행
작업자에게 유용한 정보를 표시합니다.
3
MMC 상태 정보
메뉴 확장 심볼(이 키를 누르면 추가 가능을 제공하는 수평 소프트 키 표시줄이 나타납니다.) 혼합 표기 활성(대문자/소문자) 데이터 전송 중 PLC 프로그램 도구로 연결됨
4 수직 및 수평 소프트 키 표시줄
설명서에서 소프트 키 표시
소프트 키를 찾기 쉽도록 가로 및 세로 소프트 키가 서로 다른 기본 색상으로 표시됩니다.
수평 소프트 키
수직 소프트 키
소개
1.1 화면 레이아웃
1-14 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
표준 소프트 키
이 소프트 키를 누르면 현재 화면이 닫힙니다.
입력을 취소하고 창을 닫으려면 이 소프트 키를 사용합니다.
이 소프트 키를 선택하면 입력이 완료되고 계산이 시작됩니다.
이 소프트 키를 선택하면 입력이 완료되고 입력값이 적용됩니다.
이 기능을 사용하면 직경 프로그램에서 반경 프로그램으로 화면을 전환할 수 있습니다.

소개
1.2 조작 영역
1-15 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
1.2 조작 영역
다음과 같은 조작 영역에서 시스템의 기능을 수행할 수 있습니다.
기계 좌표 기계 동작
옵셋/파라메타 옵셋 값 및 셋팅 데이터 입력
프로그램 가공 프로그램 작성
프로그램 관리자 가공 프로그램 디렉토리
시스템 진단, 스타트업
알람 알람 및 메시지 목록
조작 영역을 전환하려면 해당 키(하드 키)를 사용하십시오.
보호 수준/사용 권한
SINUMERIK 802D sl은 데이터 영역을 활성화하는 보호 수준/사용 권한 개념을 제공합니다. 제어 시스템에는 보호 수준 1-3에 대한 기본 암호가 함께 제공됩니다.
사용 권한 1 전문가용 암호
사용 권한 2 제조업체 암호
사용 권한 3 사용자 암호
개별 액세스 권한을 제어합니다.
아래 메뉴 목록에서 데이터 입력 및 수정 작업은 설정된 사용 권한의 영향을 받습니다.
• 공구 옵셋
• 워크 옵셋
• 셋팅 데이터
• RS232 설정
• 프로그램 작성/프로그램 수정

소개
1.3 가용성 옵션
1-16 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
1.3 가용성 옵션
1.3.1 계산기
조작 영역에서 “SHIFT”와 “=” 키를 사용하여 계산기 기능을 동작시킬 수 있습니다.
항목을 계산하는 데 기본적인 네 가지 산술 연산은 물론 “sine”, “cosine”, “squaring” 및 “square root”와 같은 함수도 사용할 수 있습니다. 내포된 항목을 계산하는 괄호 함수도 지원
됩니다. 괄호의 내포 단계에는 제한이 없습니다.
입력 필드에 값이 들어 있으면 이 값이 계산기의 입력 행으로 입력됩니다.
<Input> 키를 누르면 결과가 계산되어 계산기에 표시됩니다. Accept(적용) 소프트 키를 누르면 가공 프로그램 편집기의 현재 커서 위치에서 입력 필드에 결과가 입력되고 자동으로 계산기가 닫힙니다.
참고
입력 필드가 편집 모드에 있는 경우 <전환/토글> 키를 사용하여 원래 상태를 복원할 수 있습
니다.
그림 1-4 포켓 계산기
입력 가능한 문자
+, –, *, / 기본 산술 연산 기호
S Sine(사인) 함수 입력 커서 앞에 있는 X 값(각도)이 sin(X) 값으로 치환됩니다.
O Cosine(코사인) 함수 입력 커서 앞에 있는 X 값(각도)이 cos(X) 값으로 치환됩니다.

소개
1.3 가용성 옵션
1-17 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
Q Square(제곱) 함수 입력 커서 앞에 있는 X 값이 X2 값으로 치환됩니다.
R Square root(제곱근) 함수 입력 커서 앞에 있는 X 값이 X X √ 값으로 치환됩니다.
( ) 괄호 함수 (X+Y)*Z
계산 예
작업 입력 → 결과
100 + (67*3) 100+67*3 → 301
sin(45°) 45 S → 0.707107
cos(45°) 45 S → 0.707107
42 4 Q → 16
4√ 4 R → 2
(34+3*2)*10 (34+3*2)*10 → 400
형상의 보조 점들을 계산할 수 있도록 계산기에 다음과 같은 기능이 제공됩니다.
• 원형 구간과 직선 사이의 접선 전이 계산
• 평면에서 점을 이동
• 극좌표를 직교 좌표로 전환
• 각 관계에서 지정된 직선/직선 형상 구간의 두 번째 끝점 추가

소개
1.3 가용성 옵션
1-18 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
1.3.2 형상 요소 정렬
계산기를 열면 형상 요소를 수정할 수 있는 소프트 키가 나타납니다. 해당 입력 화면에서 형상 요소의 값을 입력합니다. 계산을 수행하려면 “Accept(적용)”를 누릅니다.
소프트 키
원의 점을 계산하는 데 사용되는 함수입니다. 형성된 접선 각도, 반경, 그리고 원의 회전 방향
으로부터 좌표를 구합니다.
그림 1-5
원의 중심, 접선 각도, 원의 반경을 입력합니다.
원의 회전 방향을 정의하는 데 G2/G3 소프트 키를 사용합니다.
가로 좌표 및 세로 좌표 값을 계산하는 데 이 소프트 키를 사용합니다. 가로 좌표는 평면의 제 1축이고, 세로 좌표는 평면의 제 2축입니다. 계산기 함수가 호출된 입력 필드에 가로 좌표 값이 복사되고, 그 다음 입력 필드에 세로 좌표 값이 복사됩니다. 가공 프로그램 편집기에서 이 함수를 호출한 경우, 선택한 기본 평면의 축 이름과 함께 좌표가 저장됩니다.
예제: 평면 G18에서 원 구간 과 직선 사이의 교차점을 계산합니다.
전제: 반경: 10 원 중심: Z 147 X 103 직선의 연결 각도: –45°
G2/G3

소개
1.3 가용성 옵션
1-19 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
XZ
X
Z
결과: Z = 154.071 X = 110.071
그림 1-6
이 함수는 평면에 있는 점의 직교 좌표를 계산합니다. 좌표는 평면(PP) 위 직선 상의 점에 연결됩니다. 계산을 하려면 지정된 직선의 기울기(A1)에 대한 기준으로 작도될 새 직선의 경사 각도(A2)와 점 사이의 거리를 알아야 합니다.
그림 1-7
다음 좌표 또는 각도를 입력합니다.
• 지정된 점(PP)의 좌표
• 직선의 경사 각도(A1)
• PP를 참조할 새 점의 거리
• A1을 참조할 연결 직선의 경사 각도(A2)

소개
1.3 가용성 옵션
1-20 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
계속되는 계산에서 다음에 두 입력 필드에 복사되는 직교 좌표를 계산하는 데 이 소프트 키를 사용합니다. 계산기 함수가 호출된 입력 필드에 가로 좌표 값이 복사되고, 그 다음 입력 필드
에 세로 좌표 값이 복사됩니다. 가공 프로그램 편집기에서 이 함수를 호출한 경우, 선택한 기본 평면의 축 이름과 함께 좌표가 저장됩니다.
이 함수는 지정된 극좌표를 직교 좌표로 전환합니다.
그림 1-8
기준점, 벡터 길이 및 경사 각도를 입력합니다.
계속되는 계산에서 다음에 두 입력 필드에 복사되는 직교 좌표를 계산하는 데 이 소프트 키를 사용합니다. 계산기 함수가 호출된 입력 필드에 가로 좌표 값이 복사되고, 그 다음 입력 필드
에 세로 좌표 값이 복사됩니다. 가공 프로그램 편집기에서 이 함수를 호출한 경우, 선택한 기본 평면의 축 이름과 함께 좌표가 저장됩니다.
두 번째 직선이 첫번째 직선과 수직일 이루는 이유로 직선/직선 윤곽선 구간에서 누락된 종단
점을 계산하는 데 이 함수를 사용합니다.
직선의 다음 값은 알고 있습니다.
직선 1 : 시작점과 경사 각도
직선 2 : 직교 좌표계에서 길이와 하나의 끝점
그림 1-9

소개
1.3 가용성 옵션
1-21 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
이 기능은 지정된 종단점 좌표를 선택하는 데 사용합니다. 세로 좌표 값 또는 가로 좌표 값이 제공됩니다.
제 2 직선이 제 1 직선을 기준으로 시계 방향 또는 반시계 방향으로 90도 회전합니다.
누락된 종단점이 계산됩니다. 계산기 함수가 호출된 입력 필드에 가로 좌표 값이 복사되고, 그 다음 입력 필드에 세로 좌표 값이 복사됩니다. 가공 프로그램 편집기에서 이 함수를 호출한 경우, 선택한 기본 평면의 축 이름과 함께 좌표가 저장됩니다.
예제
그림 1-10
직선의 원호 구간 사이의 교차점을 계산하려면 위 그림에 원의 중심 값을 추가합니다. 접선 전
이에서 반경이 직선에 수직일 때 계산기 기능 을 사용하여 누락된 중심점 좌표를 계산합니다.
그림 1-11
1 구간의 M1 계산:
각도에 따라 정의된 직선에서 CW 방향으로 90° 회전된 반경이 나타납니다.

소개
1.3 가용성 옵션
1-22 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
원의 회전 방향의 정의하는 데 소프트 키 를 사용합니다. 지정된 끝점을 정의하려면
소프트 키 를 사용합니다.
극좌표, 직선의 경사 각도, 끝점의 세로 좌표 및 원 반경(길이)을 입력합니다.
그림 1-12
결과: X = 60 Z = -44.601
1.3.3 중국어 문자 편집
중국어 버전에서만 이 기능을 사용할 수 있습니다.
프로그램 편집기와 PLC 알람 텍스트 편집기에서 중국어 문자를 편집할 수 있습니다. 활성화
한 후 검색된 문자의 음성 알파벳을 입력 필드에 입력하십시오. 편집기가 해당 발음의 문자를 여러 개 표시하면 작업자가 1에서 9까지의 숫자를 입력하여 원하는 문자를 선택할 수 있습니다.
그림 1-13 중국어 편집기
Alt S 편집기 시작 및 종료 시 이 키 조합을 사용합니다.
1.3.4 단축 키
특수한 키 명령을 사용하여 텍스트를 선택, 복사, 삭제하거나 잘라낼 때 단축 키를 사용할 수 있습니다. 이러한 기능은 가공 프로그램 편집기와 입력 필드 모두에 사용할 수 있습니다.
CTRL C 복사 CTRL B 선택 CTRL X 잘라내기 CTRL V 붙여넣기 Alt L 대/소문자 전환 Alt H 도움말 시스템 또는 도움말 키

소개
1.4 도움말 시스템
1-23 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
1.3.5 파일 복사 및 붙여넣기
프로그램 관리자(6장) 및 스타트업 파일 기능(7.6절)에서 복사 및 붙여넣기 소프트 키를 사용하
여 파일 또는 전체 디렉토리를 다른 디렉토리나 드라이브로 복사할 수 있습니다. 파일을 복사
할 때 “복사” 기능은 뒤이어 “붙여넣기” 기능이 실행될 목록의 파일이나 디렉토리에 파일에 대한 참조를 입력합니다. 이 기능은 실제 복사 프로세스를 수행합니다.
생성된 목록은 새로운 복사 작업으로 덮어쓸 때까지 보존됩니다.
특수 기능: RS232 인터페이스를 데이터 대상으로 선택한 경우 붙여넣기 소프트 키가 데이터 출력 소프트 키 기능으로 바뀝니다. 파일을 읽는 경우(데이터 입력) 대상 디렉토리의 이름이 데이터 흐름에 포함되지 않기 때문에 별도의 대상을 지정할 필요가 없습니다.
1.4 도움말 시스템
도움말 시스템을 활성화하려면 정보 키를 사용하십시오. 모든 중요한 작동 기능, 연산 함수에 관한 간단한 설명을 제공합니다.
다음과 같은 정보 항목도 도움말 시스템에서 제공합니다.
• NC 명령에 대한 개요(간단한 설명 포함)
• 순환 프로그램
• 알람 메시지에 대한 설명
그림 1-14 도움말 시스템의 목차
선택한 항목을 표시합니다.
Show

소개
1.4 도움말 시스템
1-24 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 1-15 도움말 항목에 대한 설명
크로스 레퍼런스를 선택하려면 이 기능을 사용합니다. 크로스 레퍼런스는 “>>....<<” 문자로 표시됩니다. 이 소프트 키는 애플리케이션 영역에서 크로스 레퍼런스가 표시될 때에만 나타
납니다.
이 기능을 사용하여 크로스 레퍼런스를 선택합니다. 그러면 “항목으로 복귀” 소프트 키도 표시
됩니다. 이 기능을 선택하면 이전 화면으로 돌아갑니다.
목차의 용어를 검색하려면 이 기능을 사용합니다. 검색할 용어를 입력하고 검색을 시작하십
시오.
“프로그램 편집기” 영역의 도움말
시스템이 각 NC 명령에 대한 설명을 제공합니다. 도움말 텍스트를 바로 표시하려면 해당 명령 뒤에 커서를 놓고 <도움말> 키를 누릅니다.
Go to topic
Back to topic
Find

소개
1.5 네트워크 작업(옵션)
1-25 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
1.5 네트워크 작업(옵션)
참고
네트워크 기능은 SINUMERIK 802D sl Pro에서만 사용할 수 있습니다.
네트워크 어댑터가 통합되어 시스템에서 네트워킹 기능을 지원합니다. 다음과 같은 연결이 가능합니다.
• P2P(Peer-to-Peer): 크로스 케이블을 사용하여 시스템과 PC 사이를 직접 연결
• 트위스트 페어: 패치 케이블을 사용하여 기존의 로컬 네트워크에 시스템 통합
암호 형태의 데이터 전송 기능이 있는 방어형 네트워크가 802D 고유의 전송 프로토콜을 사용하여 지원됩니다. 이 프로토콜은 RCS 도구 및 가공 프로그램의 전송 또는 실행 등에 사용
됩니다.
1.5.1 네트워크 연결 구성
요구 사항
X5 포트를 통해 PC 또는 네트워크로 시스템을 연결합니다.
네트워크 파라메타 입력
“SYSTEM” 영역에서 서비스 화면 > 서비스 제어 메뉴를 선택합니다.
그림 1-16
네트워크 서비스 소프트 키를 사용하여 네트워크 파라메타를 입력할 수 있는 화면을 표시합
니다.
Servicedisplay
Servicecontrol
plus
Service network
소개
1.5 네트워크 작업(옵션)
1-26 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
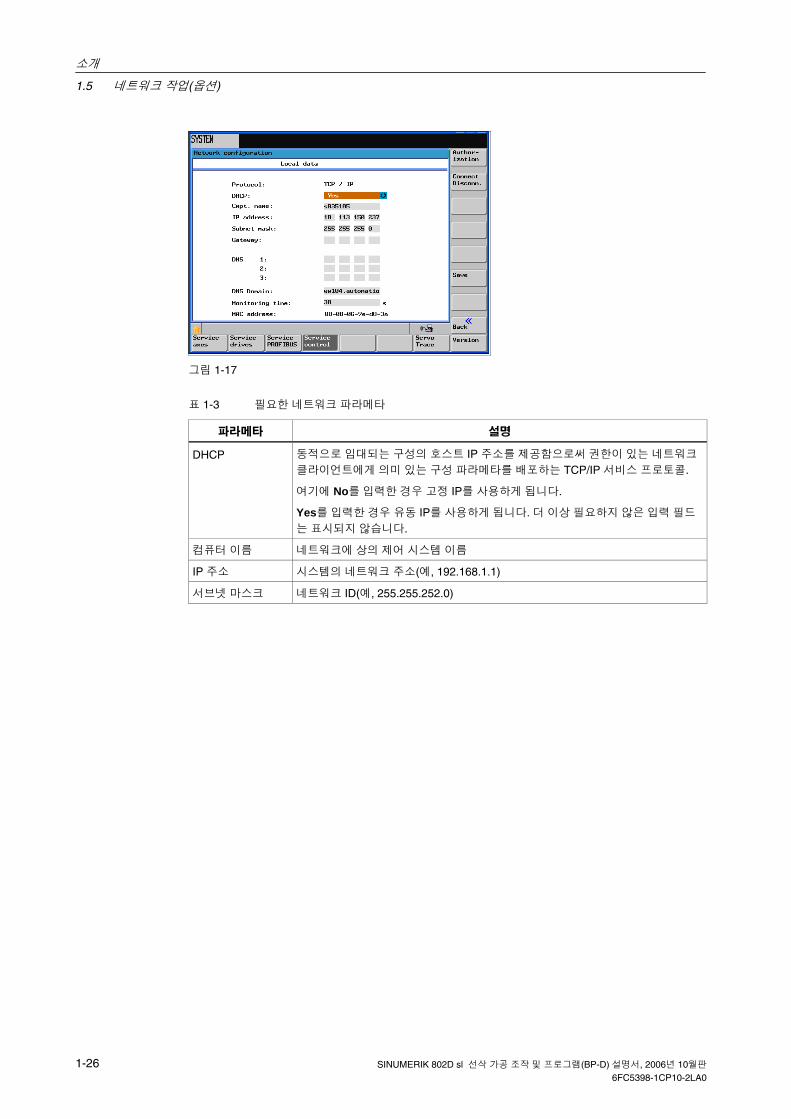
그림 1-17
표 1-3 필요한 네트워크 파라메타
파라메타 설명
DHCP 동적으로 임대되는 구성의 호스트 IP 주소를 제공함으로써 권한이 있는 네트워크 클라이언트에게 의미 있는 구성 파라메타를 배포하는 TCP/IP 서비스 프로토콜.
여기에 No를 입력한 경우 고정 IP를 사용하게 됩니다.
Yes를 입력한 경우 유동 IP를 사용하게 됩니다. 더 이상 필요하지 않은 입력 필드
는 표시되지 않습니다.
컴퓨터 이름 네트워크에 상의 제어 시스템 이름
IP 주소 시스템의 네트워크 주소(예, 192.168.1.1)
서브넷 마스크 네트워크 ID(예, 255.255.252.0)

소개
1.5 네트워크 작업(옵션)
1-27 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
통신 포트 사용
통신 포트를 인에이블로 설정하거나 해제하려면 “방화벽 서비스” 소프트 키를 사용합니다.
안전을 최대한 보장하려면 불필요한 모든 포트를 닫아야 합니다.
그림 1-18
RCS 네트워크 상의 통신에는 포트 80 및 1597이 필요합니다.
포트 상태를 변경하려면 커서를 사용하여 해당 포트를 선택합니다. <INPUT> 키를 누르면 포트 상태가 바뀝니다.
확인란이 선택된 포트는 열린 포트입니다.
Service Firewall

소개
1.5 네트워크 작업(옵션)
1-28 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
1.5.2 사용자 관리
“SYSTEM” 영역에서 서비스 화면 > 서비스 제어 메뉴를 선택합니다.
서비스 네트워크 > 인증 소프트 키를 선택하여 네트워크 파라메타를 입력할 수 있는 대화식 창을 엽니다.
개별 사용자 설정을 저장할 수 있도록 사용자 계정이 지원됩니다. 새 계정을 만들려면 입력 필드에 사용자 이름과 로그인 암호를 입력합니다.
새로운 사용자를 사용자 관리에 삽입하려면 만들기 소프트 키를 사용합니다.
그림 1-19
등록된 사용자 중에서 선택된 사용자를 삭제하려면 삭제 소프트 키를 사용합니다.
Servicedisplay
Servicecontrol
plus
Service network
Authoriz ation

소개
1.5 네트워크 작업(옵션)
1-29 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
1.5.3 사용자 로그인 – RCS 로그인
“SYSTEM” 영역에서 RCS 로그인 소프트 키를 선택합니다. 사용자 로그인에 필요한 입력 화면을 열려면 이 소프트 키를 사용합니다.
그림 1-20 사용자 로그인
로그인
해당하는 입력 필드에 사용자 이름과 암호를 입력하고 로그인 소프트 키를 선택하여 확인합
니다.
성공적으로 로그인되면 현재 사용자 줄에 사용자 이름이 표시됩니다.
대화 상자를 종료하려면 복귀 소프트 키를 선택합니다.
참고
원격 연결을 시도하는 사용자 식별을 위해서 이 로그인이 동시에 지원됩니다.
로그오프
로그오프 소프트 키를 선택합니다. 그러면 현재 사용자가 로그아웃되고 사용자 관련 설정이 모두 저장되며, 허가된 모든 권한이 취소됩니다.
RCSlog-in
plus
소개
1.5 네트워크 작업(옵션)
1-30 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
1.5.4 네트워크 연결 작업
시스템에 대한 원격 액세스(PC 또는 네트워크로부터 시스템에 액세스)는 기본적으로 비활성
화되어 있습니다.
로컬 사용자가 로그인하면 다음과 같은 기능이 RCS 도구에 제공됩니다.
• 스타트업 기능
• 데이터 전송(가공 프로그램 전송)
• 시스템의 원격 제어
파일 시스템의 일부에 액세스를 허용하려면 먼저 다른 사용자와 해당 디렉토리를 공유합
니다.
참고:
다른 사용자와 디렉토리를 공유할 경우, 권한이 부여된 네트워크 노드에 시스템의 공유 파일
로의 액세스가 허용됩니다. 공유 옵션에 따라서 사용자가 파일을 수정하거나 삭제할 수 있습
니다.
1.5.5 디렉토리 공유
이 기능은 시스템에 저장된 파일 시스템에 대한 원격 사용자 액세스 권한을 정의합니다.
공유할 디렉토리를 선택하려면 프로그램 관리자를 사용합니다.
다른형상... 키를 누릅니다.
인에이블 소프트 키를 사용하여 선택한 디렉토리를 공유하기 위한 입력 화면을 엽니다.
More...
Shares

소개
1.5 네트워크 작업(옵션)
1-31 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 1-21 디렉토리의 공유 상태
• 선택한 디렉토리에 대한 공유 상태를 선택합니다.
– 이 디렉토리는 인에이블 시키지 마십시오 디렉토리가 다른 사용자와 공유되지 않습니다.
– 이 디렉토리를 인에이블 시키십시오 디렉토리가 다른 사용자와 공유됩니다. 공유 이름을 입력하십시오.
• 공유되는 디렉토리 내의 파일을 액세스할 수 있는 권한이 있는 사용자의 이름을 이름 인에
이블 필드에 입력합니다.
• 액세스 권한을 정의합니다.
– 전체 권한 사용자 전체 권한이 부여됩니다.
– 변경 파일을 수정할 수 있는 권한을 부여합니다.
– 읽기 파일을 읽을 수 있는 권한만 부여합니다.
– 삭제 파일을 삭제할 수 있는 권한을 부여합니다.
• 계속해서 사용자 목록에서 사용자를 선택합니다. 목록으로 전환하려면 <TAB> 키를 사용합니다.
지정된 속성을 설정하려면 OK 소프트 키를 선택합니다. Windows에서처럼 공유 디렉토리는 “손” 모양으로 표시됩니다.
1.5.6 네트워크 드라이브 연결/해제
“SYSTEM” 영역에서 서비스 화면 > 서비스 제어 메뉴를 선택합니다.
네트워크 드라이브 구성 영역을 표시하려면 서비스 네트워크 > 연결/해제을 선택합니다.
Servicedisplay
Servicecontrol
plus
Service network
Connect Disconn

소개
1.5 네트워크 작업(옵션)
1-32 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 1-22
네트워크 드라이브 구성
연결 기능은 네트워크 드라이브에 로컬 드라이브 문자를 할당합니다.
그림 1-23 네트워크 드라이브 구성
지정된 드라이브가 없는 드라이브 문자에 커서를 놓고 <TAB> 키를 사용하여 경로 입력 필드
로 이동합니다. IP 주소와 공유 이름을 이 필드에 입력합니다.
예제: \\192.4.5.23\TEST\
Connect(연결) 소프트 키는 서버 연결을 드라이브 문자에 할당합니다.
네트워크 드라이브 연결 해제
네트워크에서 공유 드라이브/디렉토리의 연결을 해제하려면 연결 해제 기능을 사용합니다.
Connect
Dis-connect

소개
1.5 네트워크 작업(옵션)
1-33 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 1-24
해당 드라이브 문자에 커서를 놓고 분리 소프트 키를 선택합니다. 네트워크로부터 해당 드라
이브의 연결이 해제됩니다.

소개
1.6 RCS 도구
1-34 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
1.6 RCS 도구
RCS 도구(원격 제어 시스템)를 사용할 경우, SINUMERIK 802D sl를 사용하여 일상 작업을 쉽게 수행할 수 있도록 PC/PG용 검색이기 도구가 함께 제공됩니다.
RS232 케이블 또는 네트워크를 통해 시스템과 PC/PG를 연결할 수 있습니다.
주의
RCS 도구의 전체 기능은 RCS 802 라이센스 키를 로드한 후에만 사용할 수 있습니다. 이 키를 사용하면 로컬 네트워크를 통해 제어 시스템과의 연결을 설정할 수 있으며 (SINUMERIK 802D sl pro에만 해당) 원격 조작 기능 및 기타 기능도 사용할 수 있습니다. 라이센스 키를 사용하지 않을 경우 제어 시스템의 액세스를 위한 로컬 디렉토리(PC/PG) 공유
만 가능합니다.
그림 1-25 RCS 도구의 검색이기 창
시작한 후에는 오프라인 모드가 됩니다. 즉, PC의 파일만 관리할 수 있습니다. 온라인 모드에
서는 제어 시스템과의 파일 교환을 위해 Control 802D 디렉토리도 제공됩니다. 프로세스 모니
터링에 필요한 원격 제어 기능 또한 제공됩니다.
주의
RCS 도구는 자세한 온라인 도움말 기능을 제공합니다. 연결 설정, 프로젝트 관리 등에 대한
자세한 내용은 이 도움말 메뉴를 참조하십시오.

소개
1.7 좌표계
1-35 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
1.7 좌표계
기계 공구에서는 직교 좌표계가 사용됩니다. 기계의 이동은 기계 공구와 공작물 사이의 상대
적 이동으로 표시됩니다.
그림 1-26 축 사이에서 축 방향 결정, 선삭 가공 시 프로그램 작성에 필요한 좌표계
기계 좌표계(MCS) 기계의 종류에 따라 좌표계가 배치되는 방법이 달라질 수 있습니다. 다양한 방향으로 회전할 수 있습니다.
그림 1-27 선삭 가공 기계 사용 시 기계 좌표/기계 축
이 좌표계의 원점은 기계 영점입니다 이 점은 기계 제조업체가 정의한 기준점만을 표시합니다. 이 점에 액세스할 필요가 없습니다.
기계 축의 가로 이동 범위가 음수 범위일 수 있습니다.
+ Z
+X
소개
1.7 좌표계
1-36 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
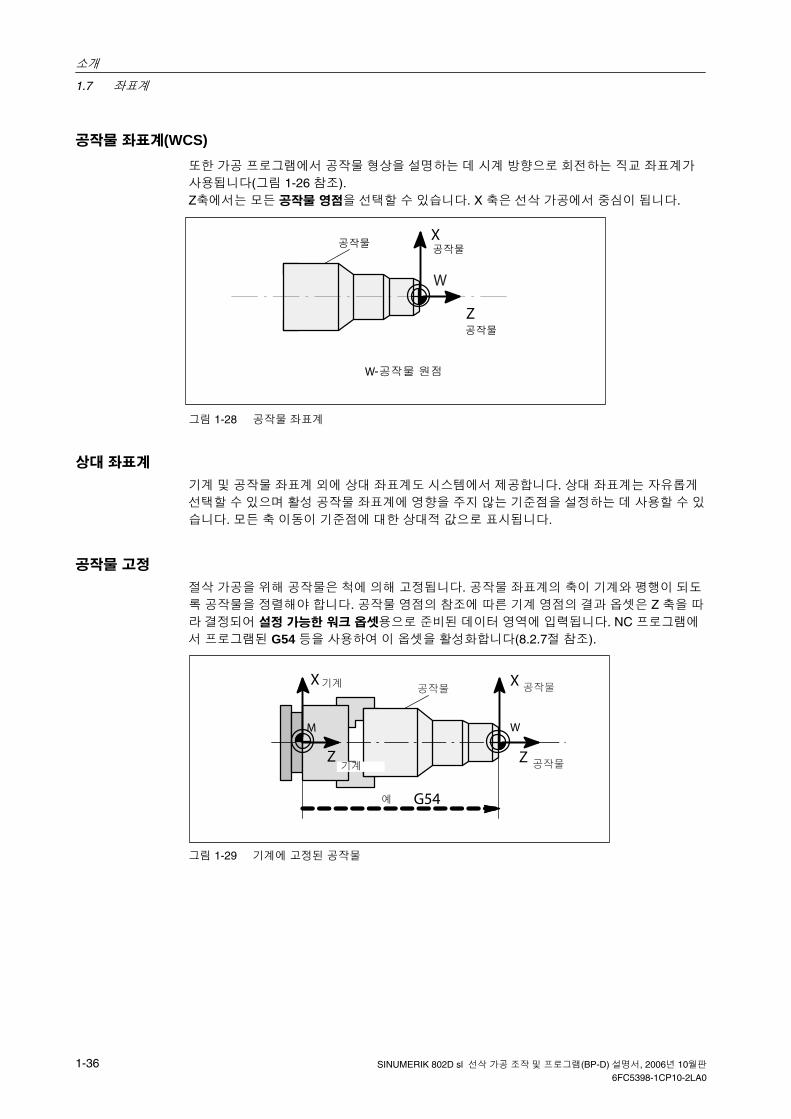
공작물 좌표계(WCS) 또한 가공 프로그램에서 공작물 형상을 설명하는 데 시계 방향으로 회전하는 직교 좌표계가 사용됩니다(그림 1-26 참조). Z축에서는 모든 공작물 영점을 선택할 수 있습니다. X 축은 선삭 가공에서 중심이 됩니다.
W
그림 1-28 공작물 좌표계
상대 좌표계
기계 및 공작물 좌표계 외에 상대 좌표계도 시스템에서 제공합니다. 상대 좌표계는 자유롭게 선택할 수 있으며 활성 공작물 좌표계에 영향을 주지 않는 기준점을 설정하는 데 사용할 수 있습니다. 모든 축 이동이 기준점에 대한 상대적 값으로 표시됩니다.
공작물 고정
절삭 가공을 위해 공작물은 척에 의해 고정됩니다. 공작물 좌표계의 축이 기계와 평행이 되도
록 공작물을 정렬해야 합니다. 공작물 영점의 참조에 따른 기계 영점의 결과 옵셋은 Z 축을 따라 결정되어 설정 가능한 워크 옵셋용으로 준비된 데이터 영역에 입력됩니다. NC 프로그램에
서 프로그램된 G54 등을 사용하여 이 옵셋을 활성화합니다(8.2.7절 참조).
그림 1-29 기계에 고정된 공작물

소개
1.7 좌표계
1-37 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
현재 공작물 좌표계
프로그램한 워크 옵셋 TRANS를 사용하여 공작물 좌표계를 기준으로 한 옵셋을 계산하여 현재 공작물 좌표계를 산출할 수 있습니다(“프로그램 가능한 워크 옵셋: TRANS”절 참조).

소개
1.7 좌표계
1-38 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
메모

2-39 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
전원 인가 및 원점 복귀
참고
전원 켜기 및 원점 복귀 방식은 기계에 따라 다를 수 있으므로 SINUMERIK 802D 및 기계의 전원을 켤 때는 장비 제조업체의 설명서를 참조하십시오.
이 설명서에서는 802D 표준 기계 조작반(MCP)을 사용하는 것으로 간주합니다. 다른 MCP를 사용할 경우 여기에 설명된 작업과 달라질 수도 있습니다.
작업 순서
먼저 CNC 및 기계에 전원을 켭니다. 시스템 스타트업 후에는 기본적으로 Jog Ref(조그 원점
복귀) 모드에서 “기계좌표” 조작 영역이 표시됩니다.
원점 복귀 화면이 동작합니다.
그림 2-1 “원점 복귀” 시작 화면
기계 조작반의 <원점 복귀> 키를 사용하여 “원점 복귀” 기능을 활성화합니다.
“원점 복귀” 창(그림 2-1)에 원점 복귀 여부가 표시됩니다.
해당 축이 원점복귀되지 않았습니다.
해당 축이 원점복귀되었습니다.
22
전원 켜기 및 원점 복귀
2-40 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
방향 키를 누릅니다.
잘못된 이송 방향을 선택하면 동작되지 않습니다.
각 축의 원점에 차례로 접근합니다. 모드(MDA, 자동 또는 조그)를 전환하여 기능을 종료합니다.
참고
“원점 복귀”는 JOG REF 모드에서만 사용할 수 있습니다.
...
–Z
+X

3-41 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
설정
사전 작업
CNC로 작업하려면 먼저 다음 순서로 기계, 공구 등을 CNC 설정해야 합니다.
• 공구 및 공구 옵셋을 입력합니다.
• 워크 옵셋을 입력/수정합니다.
• 셋팅 데이터를 입력합니다.
3.1 공구 및 공구 옵셋 입력
기능
공구 옵셋은 형상, 마모량, 공구 종류를 설명하는 여러 가지 데이터로 구성됩니다. 번호가 특정 공구 형식에 따라 달라지는 다양한 파라메타가 각 공구에 포함되어 있습니다. 공구는 숫자 (T 번호)로 식별됩니다.
8.6절 “공구 및 공구 보정”을 참조하십시오.
작업 순서
이 소프트 키를 사용하면 작성된 공구 목록을 보여주는 “공구 옵셋 데이터” 창을 열 수 있습니
다. 공구 목록에서 이동하려면 커서 키와 <페이지 업/다운 키> 키를 사용합니다.
그림 3-1 공구 목록
3
Tool
List

설정
3.1 공구 및 공구 옵셋 입력
3-42 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
다음 방법으로 옵셋을 입력합니다.
• 변경할 입력 필드에 커서를 놓고
• 값을 입력합니다.
그리고 <Input> 키를 누르거나 커서 키를 사용하여 확인합니다.
일부 특수한 공구에는 값을 입력해 넣을 수 있는 전체 파라메타 목록을 제공하는 소프트 키
Extend 를 사용합니다.
소프트 키
공구 보정 데이터를 측정하는 데 이 소프트 키를 사용합니다.
공구 옵셋 데이터 수동 측정(3.1.2절 참조)
공구 옵셋 데이터 반자동 측정(3.1.3절 참조)
터치 프로브를 계측하는 데 이 소프트 키를 사용합니다.
이 소프트 키를 사용하면 공구를 삭제할 수 있습니다.
공구의 전체 파라메타를 표시할 때 이 키를 사용합니다. 파라메타의 의미는 “프로그램 작성” 절을 참조하십시오.
그림 3-2 특수 공구의 입력 화면
추가 절삭날을 만들고 표시하는 데 필요한 모든 기능을 제공하는 하위 메뉴가 표시됩니다.
다음 절삭날 번호를 선택하려면 이 소프트 키를 사용합니다.
이전 절삭날 번호를 선택하려면 이 소프트 키를 사용합니다.
Measur. manual
Measure auto
Calibrate probe
Delete tool
Extend
Edges
D>>
<< D
Toolmeasure

설정
3.1 공구 및 공구 옵셋 입력
3-43 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
New tool edge
Reset edge
Change type
새 절삭날을 만들려면 이 소프트 키를 사용합니다.
새 절삭날에 대한 모든 값을 0으로 리셋하려면 이 소프트 키를 사용합니다.
공구 형식을 변경하려면 이 기능을 사용합니다. 적절한 소프트 키를 사용하여 공구 형식을 선택합니다.
이 기능은 번호로 공구를 검색하는 데 사용합니다.
새 공구를 등록하는 데 이 소프트 키를 사용합니다.
3.1.1 새 공구 작성
작업 순서
이 기능이 제공하는 두 개의 소프트 키를 사용하여 공구 종류를 선택할 수 있습니다. 공구 종류를 선택한 후 원하는 공구 번호(최대 3자리 숫자)를 입력합니다.
그림 3-3 "공구입력" 화면 공구 번호 입력
밀링과 드릴 가공 공구에서는 가공 방향을 선택해야 합니다.
그림 3-4 밀링 공구의 가공 방향 설정
Tuning Tool
Find
Newtool
Newtool

설정
3.1 공구 및 공구 옵셋 입력
3-44 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
입력을 완료하려면 OK를 누릅니다. 공구 목록에 새로운 공구가 등록됩니다.
3.1.2 공구 옵셋 수동 측정
기능
공구 T의 형상을 판단하는 데 이 기능을 사용할 수 있습니다.
사전 조건
해당 공구를 로드합니다. 조그 모드에서는 기계 좌표값을 알고 있는 위치로 공구의 해당 절삭날
을 이동합니다. 이는 형상을 알고 있는 공작물일 수 있습니다.
절차
해당 필드 Ø 또는 Z0에 기준점을 입력합니다.
주의 사항: 공구 형식(선삭 공구, 드릴)에 따라 축 1 또는 2의 길이 할당이 결정됩니다. 선반 가공 공구의 경우, X 축의 기준점이 직경 치수입니다.
점 F(기계 좌표)의 실제 위치와 기준점을 사용하여 시스템에 의해 축 길이 1 또는 2가 계
산됩니다.
참고: 이미 결정된 원점(예: G54의 값)도 사용할 수 있습니다. 이 경우에 공구의 절삭날을 기준
으로 공작물의 원점에 접근합니다. 공작물의 원점에 바로 절삭날이 위치한 경우 기준점은 0입
니다.
그림 3-5 절삭 가공 공구를 사용하여 길이 옵셋 측정
OK
길이 2=?
길이
1=
?
직경
기계 좌표
예 G54
실제 위치 Z
공작물
기계 좌표
F - 공구 홀더 원점
M - 기계 영점(0)
W - 공작물 영점(0) X 축의 옵셋 값은 직경 값입니다.
실제 위치 X

설정
3.1 공구 및 공구 옵셋 입력
3-45 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 3-6 드릴을 사용하여 길이 옵셋 측정: 길이 1/Z 축
참고
그림 3-6은 변수가 머신 데이터 MD 42950 TOOL_LENGTH_TYPE이고 MD 42940 TOOL_LENGHT_CONST가 0일 경우에만 적용됩니다. 그렇지 않으면 길이 공구 2는 밀링 및 드릴링 공구에 적용됩니다. 제조업체 설명서 “SINUMERIK 802D sl 조작 설명서”를 참조하십
시오.
작업 순서
조그 모드에서 공구 측정 소프트 키를 사용하여 수동 및 반자동 측정 목록 상자를 표시합니다.
그림 3-7 수동 또는 반자동 측정 선택
이 소프트 키를 눌러 공구 측정 창을 엽니다.
기계
좌표
공작물
Lenght 1=?예 G55
실제 위치 Z 공작물
F - 공구 홀더 원점
M - 기계 영점(0)
W - 공작물 영점(0)
Tool Measur.
Measur. manual
길이 1=?

설정
3.1 공구 및 공구 옵셋 입력
3-46 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 3-8 "공구 측정" 화면
• “Ø” 필드에 공작물 직경을 입력하거나 “Z0” 필드에 공작물 길이를 입력합니다. 기계 죄표
및 워크 옵셋 값이 적용됩니다. 스페이서를 사용할 때는 스페이서 두께도 고려 대상으로 입력할 수 있습니다.
• 길이 1 설정 또는 길이 2 설정 소프트 키를 누르면 제어 시스템에서 사전 선택된 축의 검색
된 길이 1 또는 길이 2를 결정합니다. 결정된 옵셋 값이 저장됩니다.
이 소프트 키를 선택하면 X 위치가 저장됩니다. 따라서 X 방향으로 이송할 수 있습니다. 즉, 공작물의 직경 등을 결정할 수 있습니다. 저장된 축 위치 값은 길이 옵셋을 계산하는 데 사용
됩니다.
소프트 키의 활성화 여부는 디스플레이 머신 데이터 373 MEAS_SAVE_POS_LENGTH2에 의해 결정됩니다. “SINUMERIK 802D sl 조작 설명서”를 참조하십시오.
Save position

설정
3.1 공구 및 공구 옵셋 입력
3-47 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
3.1.3 프로브를 사용하여 공구 측정
작업 순서
이 소프트 키를 눌러 공구 측정 창을 엽니다.
그림 3-9 "공구 측정” 화면
이 입력 화면에서 공구 번호와 절삭날 번호를 입력할 수 있습니다. 또한 절삭날 위치가 기호 뒤에 표시됩니다.
화면 양식을 열면 입력 필드에 현재 가공 중인 공구의 데이터가 표시됩니다.
공구는 다음 중 하나입니다.
• 현재 NC에서 사용 중인 공구(가공 프로그램을 통해 로드됨) 또는
• PLC를 통해 로드된 공구
공구가 PLC를 통해 로드된 경우, 입력 화면에 표시된 공구 번호가 T,F,S 창의 번호와 다릅
니다.
공구 번호를 변경해도 이 기능을 통한 자동 공구 교환은 실행되지 않습니다. 하지만 입력한 공구에 측정 결과가 지정됩니다.
측정 프로세스
좌우 이동 키 또는 핸드휠을 사용하여 프로브에 접근합니다.
“프로브 트립됨” 표시가 나타난 후 이송 키를 놓고 측정 작업이 완료될 때까지 기다립니
다. 자동 측정 중에는 측정 프로세스의 현재 진행률을 기호로 보여주는 다이얼 게이지 가 표시됩니다.
Measur. Auto
Tool Measur.

설정
3.1 공구 및 공구 옵셋 입력
3-48 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
참고
측정 프로그램을 작성하는 데 Settings(설정) 화면의 “안전 공차” 파라메타와 프로브 데이터 화면의 피드가 사용됩니다(3.1.5절 참조).
여러 개의 축이 동시에 이동할 때는 옵셋 데이터를 계산할 수 없습니다.
3.1.4 광학 계측기를 사용하여 공구 측정
그림 3-10 광학 계측기를 사용하여 측정(T 및 D 입력 필드에 대해서는
"프로브를 사용하여 공구 측정" 참조)
측정 프로세스
측정하기 위해 조준선에 공구 팁이 나타날 때까지 공구를 이동합니다. 밀링 공구의 경우 절삭
날의 최고점을 사용하여 공구 길이를 결정합니다.
계속해서 길이 설정 소프트 키를 눌러 옵셋 값을 계산합니다.
3.1.5 프로브 설정
아래 화면에서 프로브 좌표를 저장하고 자동 측정 프로세스에 대한 축 피드를 설정합니다.
모든 위치 값은 기계 좌표계를 기준으로 입력합니다.
Data probe
Settings

설정
3.1 공구 및 공구 옵셋 입력
3-49 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 3-11 "프로브 데이터” 입력 화면
표 3-1
파라메타 의미
절대치 위치 P1 프로브의 Z- 방향 절대 위치
절대치 위치 P2 프로브의 X+ 방향 절대 위치
절대치 위치 P3 프로브의 Z+ 방향 절대 위치
절대치 위치 P4 프로브의 X- 방향 절대 위치
이송 속도 공구가 프로브에 접근할 때 사용하는 피드
프로브 계측
프로브는 기본설정 메뉴나 공구 측정 메뉴에서 보정할 수 있습니다. 프로브의 네 개 점에 접근해야 합니다.
계측 작업에서는 공구 팁 위치 3 또는 4와 유형 500 공구를 사용합니다.
두 개의 절삭날 데이터 레코드에 네 지점의 프로브 위치를 결정하는 데 필요한 옵셋 파라메타
가 기록됩니다.
그림 3-12 프로브 보정
Calibrate probe

설정
3.1 공구 및 공구 옵셋 입력
3-50 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
이 화면이 나타나고 프로브의 현재 위치 옆에 실행될 단계를 보여주는 동영상이 표시됩니다. 적절한 축에서 이 점에 접근할 수 있어야 합니다.
“프로브 트립됨” 표시가 나타난 후 이송 키를 놓고 측정 작업이 완료될 때까지 기다립니다.
자동 측정 중에는 측정 프로세스의 현재 진행률을 기호로 보여주는 다이얼 게이지 가 표시됩니다.
측정 프로그램에서 제공된 위치는 실제 프로브 위치를 계산하는 데 이용됩니다.
모든 위치에 접근하지 않은 채 측정 기능을 중단할 수 있습니다. 이미 측정된 지점의 값은 저장됩니다.
참고
측정 프로그램을 작성하는 데 기본설정 화면의 “안전 거리” 파라메타와 프로브 데이터 화면의 피드가 사용됩니다.
여러 개의 축이 동시에 이동할 때는 옵셋 데이터를 계산할 수 없습니다.
측정에 필요하지 않은 점을 건너뛸 때는 다음 단계 기능을 사용합니다.

설정
3.2 워크 옵셋 입력/수정
3-51 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
3.2 워크 옵셋 입력/수정
기능
원점 복귀 후 실제값 메모리와 실제값 디스플레이는 기계 영점을 기준으로 표시됩니다. 하지
만 가공 프로그램은 항상 공작물 영점을 기준점으로 합니다. 이 옵셋을 워크 옵셋으로 입력해
야 합니다.
작업 순서
OFFSET PARAM 키와 제로 옵셋 소프트 키를 사용하여 워크 옵셋을 선택합니다.
설정 가능한 모든 워크 옵셋 목록이 화면에 나타납니다. 또한 화면에는 설정된 워크 옵셋의 값, 사용중인 배율 팩터, “미러링 활성” 상태 및 모든 활성 워크 옵셋의 합계도 표시됩니다.
그림 3-13 "제로 옵셋” 화면
변경하고자 하는 영역에 커서를 놓고
값을 입력합니다. 커서를 이동하거나 <Input> 키를 눌러서 입력된 값을 워크 옵셋으로 저장합
니다.
절삭날의 보정 값이 즉시 적용됩니다.
Work
Offset
Change activated

설정
3.2 워크 옵셋 입력/수정
3-52 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
3.2.1 워크 옵셋 결정
요구 사항
해당 워크 옵셋(예, G54)이 있는 창과 옵셋을 설정할 축을 선택해야 합니다.
그림 3-14 워크 옵셋 - Z 축 측정
진행 방법
“공작물 측정”소프트 키를 선택합니다. “기계 좌표” 화면으로 전환되고 워크 옵셋을 측정하기 위한 화면이 표시됩니다. 선택한 축이 검은색 배경의 소프트 키로 나타납니다.
그런 다음 공구 팁으로 공작물을 절삭합니다. “Set position to(위치 지정):” 필드에 공작물 좌표 시스템에서 원하는 공작물 절삭날의 위치를 입력합니다.
그림 3-15 Z축의 워크 옵셋 측정 화면
이 소프트 키를 선택하면 옵셋이 계산되고 그 결과가 “옵셋” 필드에 표시됩니다.
기계 좌표
워크 옵셋 Z=?
기계 좌표
실제 위치 Z 공작물
F - 공구 홀더 원점
M - 기계 영점(0)
W - 공작물 영점(0)
Measure workpiece
Set work offset
길이 2

설정
3.3 셋팅 데이터 프로그램 – “파라메타” 조작 영역
3-53 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
3.3 셋팅 데이터 프로그램 – “파라메타” 조작 영역
기능
셋팅 데이터를 사용하면 작동 상태에 대한 설정을 정의할 수 있습니다. 필요하면 변경할 수 있습니다.
작업 순서
OFFSET PARAM 및 셋팅 데이터 소프트 키를 사용하여 셋팅 데이터를 선택합니다.
셋팅 데이터 소프트 키에는 여러 가지 옵션을 설정할 수 있는 하위 메뉴가 있습니다.
그림 3-16 셋팅 데이터 시작 화면
조그 이송속도
조그 모드의 피드 값 피드 값이 “0”이면 머신 데이터에 저장된 값이 사용됩니다.
주축
주축 속도
최소/최대
“최대” (G26) / “최소” (G25) 영역에 입력된 스핀들 속도 제한값은 머신 데이터에 입력된 값 범위 내에서만 사용할 수 있습니다.
프로그램(제한 속도)
주속 일정 제어(G96)에서 프로그램 가능한 속도 상한(LIMS)입니다.
드라이런 속도(DRY)
“드라이런”을 선택한 경우, 자동 모드에서 프로그램된 피드 대신에 여기서 입력할 수 있는 피드가 사용됩니다.
나사 절삭 시작 각도(SF)
나사 절삭에서는 스핀들의 시작 위치가 각도로 표시됩니다. 나사 절삭 작업이 반복되는 경우 각도를 변경하여 다중 나사를 절삭할 수 있습니다.
Setting
data

설정
3.3 셋팅 데이터 프로그램 – “파라메타” 조작 영역
3-54 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
변경할 입력 필드에 커서를 놓고 값을 입력합니다.
<Input> 키를 누르거나 커서를 이동하여 확인합니다.
소프트 키
가공 영역 한계 형상 및 추가 축과 함께 활성화됩니다. 가공 영역 한계를 사용하려는 경우 여기에 한계 값을 입력할 수 있습니다. 활성화 소프트 키를 눌러 선택된 축에 입력된 값을 적용하
거나 해제합니다.
그림 3-17
타이머 카운터
그림 3-18
Work area limit.
Time counter

설정
3.3 셋팅 데이터 프로그램 – “파라메타” 조작 영역
3-55 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
의미:
• 전체 수량: 생산된 공작물의 총 수(실제 총계)
• 요구 수량: 필요한 공작물 수(공작물 지령치 수)
• 가공 수량: 시작 시점 이후 생산된 모든 공작물의 수가 카운트됩니다.
• 동작 시간: 자동 모드에서 NC 프로그램의 총 실행 시간
자동 모드에서 NC 시작부터 프로그램 종료/리셋 사이에 실행된 모든 프로그램의 실행 시간이 합산됩니다. 제어 시스템의 매 스타트업마다 타이머가 0으로 리셋됩니다.
• 가공 시간: 총 작동 시간
선택한 NC 프로그램에서 NC 시작부터 프로그램 종료/리셋 사이의 실행 시간이 측정됩니
다. 새로운 NC 프로그램을 시작하면 타이머가 리셋됩니다.
• 절삭 시간
경로 축 런타임은 급이송을 활성화하지 않고 공구를 활성화한 상태에서 NC 시작부터 프로
그램 종료/리셋 사이에 모든 NC 프로그램에서 측정됩니다. 드웰 시간이 동작 중일 때 측정
이 중단됩니다.
“기본값을 사용한 시스템 스타트업”의 경우 타이머가 0으로 자동 리셋됩니다.
이 기능을 사용하면 시스템 상의 모든 셋팅 데이터가 목록 형태로 표시됩니다. 다음과 같은 데이터로 구분됩니다.
• 일반
• 축 관련
• 채널 셋팅 데이터
그림 3-19
Misc

설정
3.4 R 파라메타 – “Offset/Parameter(옵셋/파라메타)” 조작 영역
3-56 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
3.4 R 파라메타 - “Offset/Parameter(옵셋/파라메타)” 조작 영역
기능
R 파라메타 시작 화면에 시스템에 존재하는 모든 R 파라메타가 표시됩니다(8.9절 “R 파라메
타” 참조). 필요하면 변경할 수 있습니다.
그림 3-20 "R 파라메타" 화면
작업 순서
“OFF PARAM(옵셋/파라미터)” 조작 영역에서 R 파라메타 소프트 키를 사용합니다.
변경할 영역으로 이동한 후 값을 입력합니다.
<Input> 키를 누르거나 커서를 이동하여 확인합니다.
R 파라메타를 찾습니다.
R vari-
able
Find

4-57 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
수동 제어 모드
조그 및 MDA 모드에서는 수동으로 제어할 수 있습니다.
Back <<
Set rel
x=0
z=0
Deletebase W0
Add axes
Allto zero
SettingsSetbase
Measureworkpiece
Back <<
Switch mm>inch.
Measuremanual
Measureauto
Calibrateprobe
Back <<
Set workoffset
X
Z
Workoffset
Back <<
Toolmeasure
Dataprobe
그림 4-1 "Jog(조그)" 메뉴 트리
Face Settings
Abort
OK
Setbasis
Peripher.surface
Back <<
Set rel
x=0
z=0
Deletebase W0
Add axes
Allto zero
Back <<
Switch mm>inch.
Dataprobe
그림 4-2 MDA 메뉴 트리
4

수동 제어 모드
4.1 조그 모드 – “기계좌표” 조작 영역
4-58 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
4.1 조그 모드 – “기계좌표” 조작 영역
작업 순서
기계 조작반의 <조그> 키를 사용하여 조그 모드를 선택합니다.
축을 이동하려면 X 또는 Z축에 해당하는 키를 누릅니다.
키를 놓을 때까지 셋팅 데이터에 저장된 속도로 축이 계속 이동합니다. 셋팅 데이터 값이 0이
면 머신 데이터에 저장된 값이 사용됩니다.
필요한 경우 오버라이드 스위치를 사용하여 속도를 조정할 수 있습니다.
급이송 오버라이드 키를 누르면 두 키를 모두 놓을 때까지 선택한 축이 급이송 속도로 이동합
니다.
조그 모드에서는 동일한 조작 순서에 따라 조정 가능한 증분값만큼 축을 이동할 수 있습니다. 증분치 설정 값이 상태 영역에 표시됩니다. 조그 모드 선택을 취소하려면 <조그> 키를 를 한 번 더 누릅니다.
JOG 시작 화면에 현재 좌표, 피드, 스핀들 값 및 현재 공구가 표시됩니다.
그림 4-3 JOG 시작 화면
+X -Z...
%

수동 제어 모드
4.1 조그 모드 – “기계좌표” 조작 영역
4-59 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
파라메타
표 4-1 JOG 시작 화면 파라메타 설명
파라메타 설명
MCS
X
Z
MCS (기계 좌표계) 또는 WCS (공작물 좌표계)에 있는 축을 표시합니다.
+X
– Z
+ 또는 -의 방향으로 축을 이송하는 경우에는 해당 필드에 양수 또는 음수 부호가 나타납
니다.
정지된 경우 부호가 표시되지 않습니다.
위치
mm MCS 또는 WCS 에서 축이 이동할 거리가 이 필드에 표시됩니다.
Repos 옵셋 조그 모드에서 “프로그램 중단” 상태로 축이 이동하는 경우, 각 축의 이동 거리가 중단점을
기준으로 열에 표시됩니다. G 코드 중요한 G 함수를 표시합니다. 주축 S
r.p.m. 주축의 지령치와 실제값을 표시합니다.
피드 F mm/min 경로 피드 실제값과 지령치를 표시합니다.
공구 T 현재 절삭날 번호 및 동작 중인 공구가 표시됩니다.
참고
두 번째 스핀들이 설정된 경우 워크 스핀들은 작은 글꼴로 표시됩니다. 창에는 항상 한 스핀들
의 데이터만 표시됩니다.
시스템은 다음 방식으로 스핀들 데이터를 표시합니다.
마스터 스핀들 표시(크게 표시):
– 유휴 상태
– 스핀들이 시작할 때
– 두 스핀들이 모두 활성 상태일 때
워크 스핀들 표시(작게 표시):
– 워크 스핀들이 시작할 때
로드 메타는 현재 동작중인 스핀들에 적용됩니다.
소프트 키
이 소프트 키는 베이스 워크 옵셋을 설정하거나 상대 좌표계에서 임시 기준점을 설정할 때 사용합니다. 열고 난 후 이 기능을 사용하여 베이스 워크 옵셋을 설정할 수 있습니다.
Set base
수동 제어 모드
4.1 조그 모드 – “기계좌표” 조작 영역
4-60 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
다음과 같은 하위 기능을 사용할 수 있습니다.
• 원하는 축 위치 직접 입력 입력 창에서 원하는 축에 입력 커서를 놓고 새 위치를 입력합니다. 그런 다음 <Input> 키를 누르거나 커서를 이동하여 입력 내용을 적용합니다.
• 모든 축을 0으로 설정 전체값 제로 설정 소프트 키를 누르면 해당 축의 현재 위치를 0으로 덮어씁니다.
• 개별 축을 0으로 설정 소프트 키 X=0 또는 Z=0을 선택하면 현재 위치를 0으로 덮어씁니다.
REL 설정 소프트 키를 사용하면 화면을 상대 좌표계로 전환할 수 있습니다. 이후 입력에 따라 이 좌표계의 기준점이 변경됩니다.
참고
변경된 베이스 워크 옵셋은 다른 워크 옵셋의 영향을 받지 않고 별도로 작동됩니다.
워크 옵셋을 측정할 때 이 소프트 키를 사용합니다(3장 참조).
공구 옵셋을 측정할 때 이 소프트 키를 사용합니다(3장 참조).
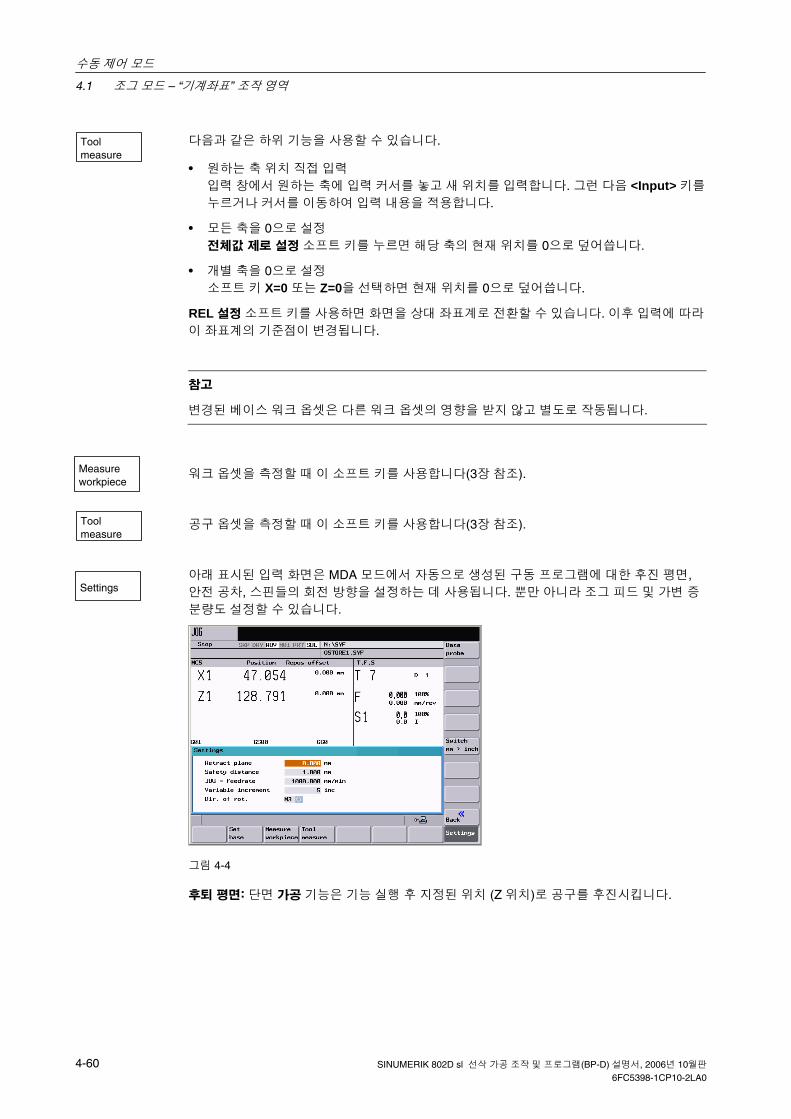
아래 표시된 입력 화면은 MDA 모드에서 자동으로 생성된 구동 프로그램에 대한 후진 평면, 안전 공차, 스핀들의 회전 방향을 설정하는 데 사용됩니다. 뿐만 아니라 조그 피드 및 가변 증분량도 설정할 수 있습니다.
그림 4-4
후퇴 평면: 단면 가공 기능은 기능 실행 후 지정된 위치 (Z 위치)로 공구를 후진시킵니다.
Tool measure
Measure workpiece
Tool measure
Settings
수동 제어 모드
4.1 조그 모드 – “기계좌표” 조작 영역
4-61 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
안전 거리: 가공 물체 표면까지의 안전 공차 거리 가공 물체 표면과 가공 물체 사이의 최소 거리를 정의하는 값입니다. 이 값은 “단면 가공” 및 “자동 공구 측정” 기능에 의해 사용됩니다.
JOG 이송속도: 조그 모드의 피드 값
회전 방향: 조그 및 MDA 모드에서 자동으로 생성된 프로그램에 대한 스핀들의 회전 방향입
니다.
이 소프트 키를 사용하면 미터계 또는 인치계로 전환할 수 있습니다.
4.1.1 핸드휠 지정
작업 순서
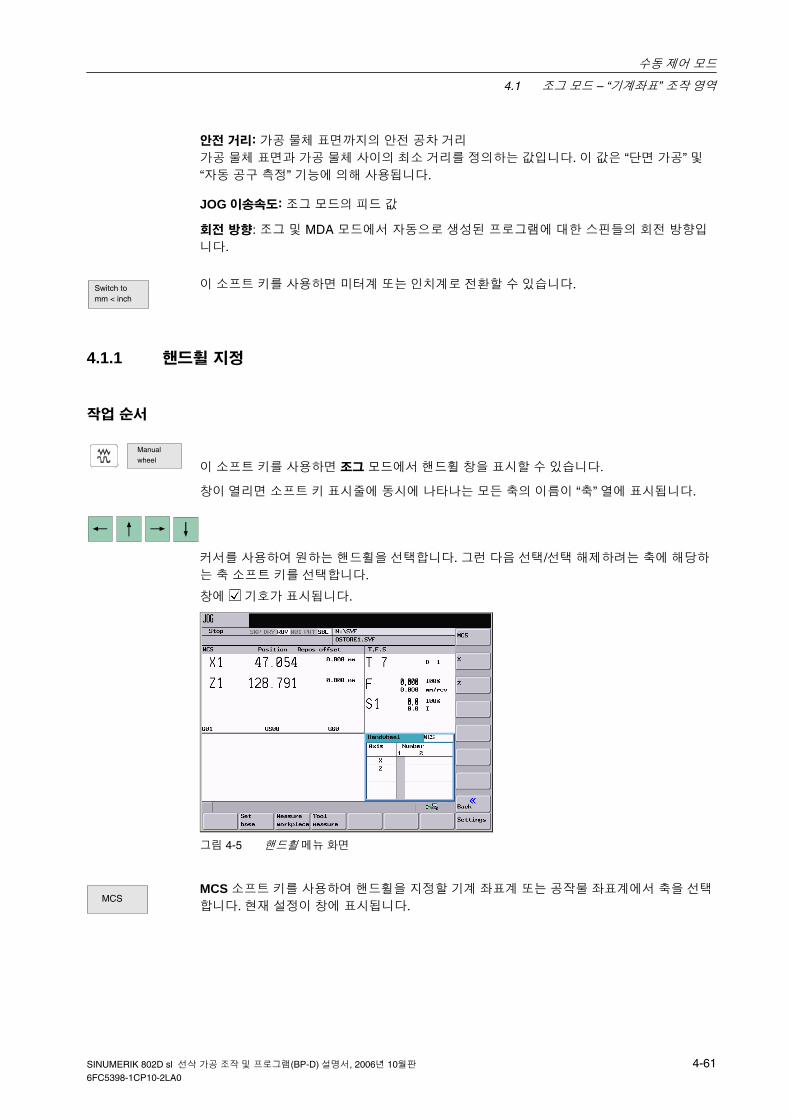
이 소프트 키를 사용하면 조그 모드에서 핸드휠 창을 표시할 수 있습니다.
창이 열리면 소프트 키 표시줄에 동시에 나타나는 모든 축의 이름이 “축” 열에 표시됩니다.
커서를 사용하여 원하는 핸드휠을 선택합니다. 그런 다음 선택/선택 해제하려는 축에 해당하
는 축 소프트 키를 선택합니다.
창에 기호가 표시됩니다.
그림 4-5 핸드휠 메뉴 화면
MCS 소프트 키를 사용하여 핸드휠을 지정할 기계 좌표계 또는 공작물 좌표계에서 축을 선택
합니다. 현재 설정이 창에 표시됩니다.
Switch to mm < inch
Manual
wheel
MCS
수동 제어 모드
4.2 MDA 모드(수동 입력) - “기계좌표” 조작 영역
4-62 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
4.2 MDA 모드(수동 입력) – “기계좌표” 조작 영역
기능
MDA 모드에서 가공 프로그램을 작성하거나 실행할 수 있습니다.
! 주의
MDA 모드는 완전 자동 모드와 동일한 안전 장치를 사용합니다.
또한, 완전 자동 모드와 동일한 전제 조건이 적용됩니다.
작업 순서
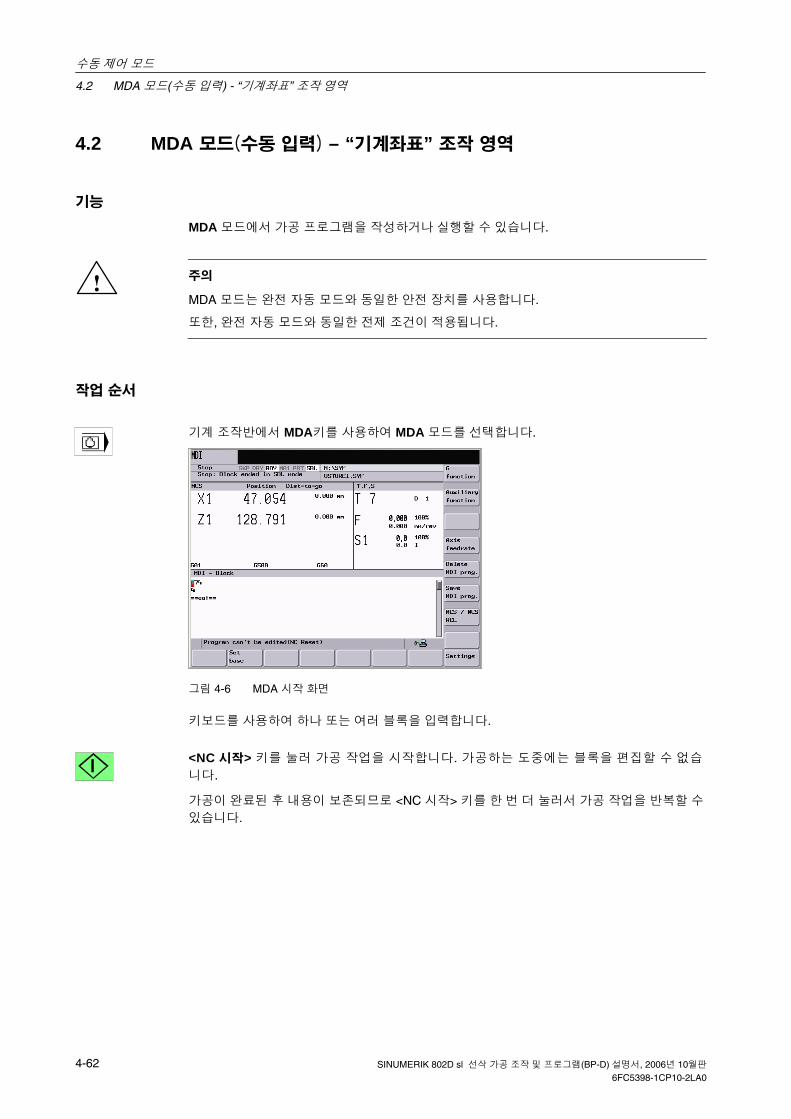
기계 조작반에서 MDA키를 사용하여 MDA 모드를 선택합니다.
그림 4-6 MDA 시작 화면
키보드를 사용하여 하나 또는 여러 블록을 입력합니다.
<NC 시작> 키를 눌러 가공 작업을 시작합니다. 가공하는 도중에는 블록을 편집할 수 없습
니다.
가공이 완료된 후 내용이 보존되므로 <NC 시작> 키를 한 번 더 눌러서 가공 작업을 반복할 수 있습니다.

수동 제어 모드
4.2 MDA 모드(수동 입력) - “기계좌표” 조작 영역
4-63 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
파라메타
표 4-2 MDA 작업 창 파라메타 설명
파라메타 설명
MCS
X Z
MCS 또는 WCS로 축 좌표를 표시합니다.
+ X -Z
+ 또는 -의 방향으로 축을 이송하는 경우에는 해당 필드에 양수 또는 음수 부호가 나타납니다.
정지된 경우 부호가 표시되지 않습니다.
위치 mm
MCS 또는 WCS 에서 축이 이동할 거리가 이 필드에 표시됩니다.
남은 거리 MCS 또는 WCS에서 축이 이동할 거리가 이 필드에 표시됩니다.
G 코드 중요한 G 함수를 표시합니다.
주축 S r.p.m.
주축의 지령치와 실제값을 표시합니다.
피드 F 피드 지령치와 실제값을 mm/min 또는 mm/rev 단위로 표시합니다.
공구 T 현재 절삭날 번호 및 동작 중인 공구 (T..., D...)가 표시됩니다.
편집 창 프로그램 “정지” 또는 “리셋” 상태에서는 편집 창에서 프로그램 블록을 입력할 수 있습니다.
참고
두 번째 스핀들이 설정된 경우 워크 스핀들은 작은 글꼴로 표시됩니다. 창에는 항상 한 스핀들
의 데이터만 표시됩니다.
시스템은 다음 방식으로 스핀들 데이터를 표시합니다.
마스터 스핀들 표시:
– 유휴 상태
– 스핀들이 시작할 때
– 두 스핀들이 모두 활성 상태일 때
워크 스핀들 표시:
– 워크 스핀들이 시작할 때
로드 메타는 현재 동작중인 스핀들에 적용됩니다.

수동 제어 모드
4.2 MDA 모드(수동 입력) - “기계좌표” 조작 영역
4-64 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
소프트 키
이 소프트 키는 베이스 워크 옵셋을 설정하는 데 사용합니다(4.1절 참조).
면 밀링(4.2.1절 참조)
4.1절을 참조하십시오.
G 코드가 표시되며 각 G 함수는 그룹에 지정되고 창에서 고정 위치를 갖게 됩니다. <페이지 다운> 및 <페이지 업> 키를 사용하여 다른 G 함수를 표시합니다. 해당 소프트 키를 다시 누르면 창이 닫힙니다.
현재 동작 중인 M 코드가 표시됩니다. 해당 소프트 키를 다시 누르면 창이 닫힙니다.
이 소프트 키를 누르면 축 이송속도 창이 표시됩니다. 해당 소프트 키를 다시 누르면 창이 닫힙니다.
이 기능을 선택하면 프로그램 창에서 블록이 삭제됩니다.
현재의 MDA 내용을 파일로 저장합니다. 직접 이름을 입력하거나 목록에서 기존의 이름을 선택할 수도 있습니다. 입력 필드와 프로그램 목록 사이를 이동하려면 <TAB> 키를 사용하십시오.
그림 4-7
선택한 좌표계에 따라 MDA모드의 실제 값이 표시됩니다. 이 소프트 키를 사용하여 두 좌표계 간에 전환할 수 있습니다.
Set base
Face
Settings
G function
Auxiliary function
Axis feedrate
Delete MDI prog.
Save MDI prog.
MCS/WCS REL

수동 제어 모드
4.2 MDA 모드(수동 입력) - “기계좌표” 조작 영역
4-65 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
4.2.1 단면 선삭 가공
기능
이 기능은 특정 가공 프로그램을 작성하지 않고 후속 가공을 위해 소재를 준비할 때 사용합
니다.
작업 순서
MDA 모드에서 단면 가공 소프트 키를 선택하여 입력 화면을 엽니다.
• 축을 시작 지점으로 이동합니다.
• 화면에서 값을 입력합니다.
화면에서 값을 모두 입력한 후 이 기능은 <NC 시작> 키로 시작할 수 있는 가공 프로그램을 생성합니다. 입력 화면이 닫히고 “기계좌표” 시작 화면이 나타납니다. 여기서 프로그램의 진행 상황을 확인할 수 있습니다.
중요
“Settings(설정)” 메뉴에서 후진 평면과 안전 공차를 미리 설정해야 합니다.
그림 4-8 현재 공구 팁 위치 적용
표 4-3 Face(단면) 선삭 가공 작업 창의 파라메타 설명
파라메타 설명
공구 T 사용할 공구 입력
가공하기 전에 공구가 로드됩니다. 로드가 끝나면 필요한 가공 싸이클이 호출됩니다. 가공 싸이클은 기계 제조업체가 지정합니다.
피드 F 경로 피드 입력(mm/min 또는 mm/rev 단위)
Face

수동 제어 모드
4.2 MDA 모드(수동 입력) - “기계좌표” 조작 영역
4-66 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
표 4-3 Face(단면) 선삭 가공 작업 창의 파라메타 설명
파라메타 설명
주축 S r.p.m.
스핀들 속도 입력
Mach.(가공 형식) 표면 조도 정의 황삭과 정삭 중 선택할 수 있습니다.
직경 DM 부품 소재 직경 입력 Z0 소재 치수
Z 위치 입력
Z1 절삭 치수
절삭 치수, 증분치
DZ 절삭 치수
Z 방향 절삭 길이 입력 공작물 절삭날의 상대 증분값으로 지정됩니다.
UZ 최대 절입
Z 방향 정삭 공차
UX 최대 절입
X 방향 정삭 공차
선삭 가공
그림 4-9 선삭 가공
표 4-4 Face(단면) 선삭 가공 작업 창의 파라메타 설명
파라메타 설명
공구 T 사용할 공구 입력
가공하기 전에 공구가 로드됩니다. 로드가 끝나면 필요한 가공 싸이클이 호출됩니다.
가공 싸이클은 기계 제조업체가 지정합니다.
피드 F 경로 피드 입력(mm/min 또는 mm/rev 단위) 주축 S
r.p.m. 스핀들 속도 입력
Mach.(가공 형식) 표면 조도를 정의하려면 이 소프트 키를 사용합니다.
황삭과 정삭 중 선택할 수 있습니다.
Peripher. surface

수동 제어 모드
4.2 MDA 모드(수동 입력) - “기계좌표” 조작 영역
4-67 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
표 4-4 Face(단면) 선삭 가공 작업 창의 파라메타 설명
파라메타 설명
X0 소재 직경
소재 직경 입력
X1 절삭 길이
X 방향 절삭 길이, 증분치
Z0 위치
방향에서 공작물 절삭날의 위치 입력
Z1 절삭 길이
Z 방향 절식 길이, 증분치
DZ 최대 절입
X 방향 절입 치수 입력
UZ 황삭 가공 공차 입력 필드
UX X 방향 정삭 공차
이 소프트 키를 사용하여 현재 공구 팁 위치를 Z0 또는 X0 입력 필드에 적용합니다.
Get curr. position
수동 제어 모드
4.2 MDA 모드(수동 입력) - “기계좌표” 조작 영역
4-68 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
메모

5-69 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
자동 모드
사전 조건
기계 제조업체의 사양에 따라 기계를 자동 모드로 설정해야 합니다.
작업 순서
기계 조작반의 <자동> 키를 사용하여 자동 모드를 선택합니다.
좌표 값, 피드, 스핀들 및 공구 값, 그리고 현재 동작 중인 블록을 표시하는 AUTO 시작 화면이 나타납니다.
그림 5-1 AUTO 시작 화면
5

자동 모드
5-70 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
Programcontrol
Programtest
Tocontour
Dry runfeedrate
Condit.stop
Skip
SBL fine
ROV active
Back << Back <<
Find
Toend point
Withoutcalculate
Interr.point
Correctprogr.
Back <<
Blocksearch
그림 5-2 AUTO 메뉴 트리
파라메타
표 5-1 작업 창 파라메타 설명
파라메타 설명
MCS
X
Z
MCS 또는 WCS로 축 좌표를 표시합니다.
+ X– Z + 또는 -의 방향으로 축을 이송하는 경우에는 해당 필드에 양수 또는 음수 부호가 나타납니다.
정지된 경우 부호가 표시되지 않습니다.
위치
mm MCS 또는 WCS 에서 축이 이동할 거리가 이 필드에 표시됩니다.
남은거리 MCS 또는 WCS 에서 축이 이동할 거리가 이 필드에 표시됩니다.
G 코드 중요한 G 함수를 표시합니다.
주축 S
r.p.m. 스핀들 속도의 지령치와 실제값을 표시합니다.
피드 F
mm/min 또는
mm/rev.
피드 지령치와 실제값을 표시합니다.
공구 T 현재 절삭날 번호 및 동작 중인 공구 (T..., D...)가 표시됩니다.
현재 블록 최대 7개의 블록이 표시됩니다. 하나의 블록 표시는 화면 폭으로 제한됩니다. 몇 개의 블록이
차례로 빠르게 실행되는 경우 “Program progress(프로그램 진행)” 창으로 전환하는 것이 좋습
니다. 7블록 화면으로 전환하려면 “Program sequence(프로그램 순서)” 소프트 키를 사용하십
시오.

자동 모드
5-71 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
중요
두 번째 스핀들이 설정된 경우 워크 스핀들은 작은 글꼴로 표시됩니다. 창에는 항상 한 스핀들
의 데이터만 표시됩니다.
시스템은 다음 방식으로 스핀들 데이터를 표시합니다.
마스터 스핀들 표시:
– 유휴 상태
– 스핀들이 시작할 때
– 두 스핀들이 모두 활성 상태일 때
워크 스핀들 표시:
– 워크 스핀들이 시작할 때
로드 메타는 현재 동작중인 스핀들에 적용됩니다.
소프트 키
프로그램 제어 소프트 키(예: “블록 스킵”, “프로그램 테스트”)가 표시됩니다.
“프로그램 테스트”를 선택하면 실제로 축과 스핀들은 동작하지 않습니다. 지령치 화면에 이송
이 “시뮬레이션” 됩니다.
이 소프트 키를 선택하면 모든 이송 동작이 “드라이런 이송속도” 셋팅 데이터를 통해 지정된 피드 지령치로 수행됩니다. 프로그램된 동작 명령 대신에 드라이런 피드가 적용됩니다.
이 기능이 선택된 경우 M01이 사용된 모든 블록에서 프로그램 실행이 중지됩니다.
프로그램 실행 중에 블록 번호 앞에 슬래시가 표시된 프로그램 블록(예: “/N100”)을 스킵합
니다.
이 기능이 선택된 경우 다음과 같이 가공 프로그램 블록이 개별적으로 실행됩니다. 각 블록이 개별적으로 해독되고 각 블록에서 실행이 중지됩니다. 단, 드라이런 피드를 사용하지 않는 나사 블록은 제외됩니다. 이러한 블록에서는 현재 나사 블록 끝에서만 실행이 중지됩니다. “미세 싱글블록” 기능은 RESET(리셋) 상태에서만 선택할 수 있습니다.
피드 오버라이드 스위치는 급 이송 오버라이드에도 적용됩니다.
이 소프트 키를 누르면 현재 화면이 닫힙니다.
블록 검색 기능을 사용하면 프로그램의 원하는 위치로 이동할 수 있습니다.
전방 블록 탐색(계산 사용) 블록 검색 중에 일반 프로그램 작동과 동일한 계산이 수행되지만 축이 이동하지 않습니다.
Programmed control
Program test
Dry run feedrate
Condit. stop
Skip
SBL fine
ROV active
Back <<
Block Search
To contour

자동 모드
5-72 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
전방 블록 탐색(블록 종점 계산) 검색 중에 일반 프로그램 실행과 동일한 방식으로 계산되지만 실제 축은 이송되지 않습니다.
전방 블록 검색(계산 사용 안 함) 블록 검색 중에 계산이 수행되지 않습니다.
커서가 메인 프로그램 블록 중단점에 놓여집니다.
“찾기” 소프트 키는 “라인 검색”, “텍스트 검색” 등의 기능을 제공합니다.
이 소프트 키를 사용하여 에러가 있는 프로그램 부분을 수정할 수 있습니다. 모든 변경 내용이 즉시 저장됩니다.
현재 동작 중인 모든 G 코드를 표시하는 G 코드 창을 엽니다.
G 코드 창은 현재 동작중인 모든 G 코드를 표시합니다. 이 창에서 각 G 코드는 창의 고정 위치를 가지고 있으며 하나의 그룹에 할당됩니다.
<페이지 업> 또는 <페이지 다운> 키를 사용하여 추가 G 코드를 표시할 수 있습니다.
그림 5-3 활성 G 코드 창
현재 동작 중인 M 코드가 표시됩니다. 해당 소프트 키를 다시 누르면 창이 닫힙니다.
이 소프트 키를 누르면 축 이송속도 창이 표시됩니다. 해당 소프트 키를 다시 누르면 창이 닫힙니다.
이 소프트 키를 누르면 표시되는 블록 개수가 7개에서 3개로 바뀝니다.
축 표시가 기계 좌표계, 공작물 좌표계, 상대 좌표계 간에 전환됩니다.
Without calculate
To end point
Interr. point
Find
Correct progr.
G funct
Auxiliary function
Axis feedrate
Program sequence
MCS/WCS REL

자동 모드
5.1 가공 프로그램 선택/시작 - “기계 좌표” 조작 영역
5-73 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
5.1 가공 프로그램 선택/시작 – “기계좌표” 조작 영역
기능
프로그램을 시작하기 전에 시스템과 기계가 모두 설치되었는지 확인하십시오. 기계 제조업체
의 관련 안전 지침을 준수하십시오.
작업 순서
기계 조작반의 <Auto> 키를 사용하여 자동 모드를 선택합니다.
프로그램 관리자가 열립니다. NC 디렉토리(기본 선택) 또는 사용자 CF 카드 소프트 키를 사용
하여 해당 디렉토리로 이동합니다.
그림 5-4 "Program Manager(프로그램 관리자)” 화면
원하는 프로그램을 선택합니다.
가공 실행 (NC 디렉토리) 또는 외부 실행 (CF 카드 사용) 소프트 키를 사용하여 실행할 프로그
램을 선택합니다. 선택한 프로그램의 이름이 “프로그램 이름” 화면 줄에 나타납니다.
필요에 따라 여기에서 프로그램의 실행 방법을 지정할 수도 있습니다.
Execute
Programmed control

자동 모드
5.1 가공 프로그램 선택/시작 - “기계 좌표” 조작 영역
5-74 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 5-5 프로그램 제어
가공 프로그램 실행을 시작하려면 <NC 시작> 키를 누르십시오.

자동 모드
5.2 블록 검색 “기계 좌표” 조작 영역
5-75 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
5.2 블록 검색 – “기계좌표” 조작 영역
작업 순서
요구 사항: 필요한 프로그램이 이미 선택되었고(5.1절 참조) 제어 시스템이 RESET(리셋) 상태여야 합니다.
블록 검색 기능은 가공 프로그램에서 필요한 블록으로 (앞으로) 이동합니다. 가공 프로그램에
서 필요한 블록에 커서를 직접 놓으면 검색 대상이 설정됩니다.
그림 5-6 블록 검색
블록 시작점까지 블록 검색
블록 끝점까지 블록 검색
계산을 사용하지 않는 블록 검색
중단 지점이 로드됩니다.
이 소프트 키를 사용하면 찾고자 하는 용어를 입력하여 블록 검색을 수행할 수 있습니다.
Block Search
To contour
To end point
Without calculate
Interr. point
Find

자동 모드
5.3 가공 프로그램 중지 /취소
5-76 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 5-7 검색 용어 입력
검색 시작 위치를 정의할 수 있는 토글 필드가 제공됩니다.
검색 결과
필요한 블록이 “현재 블록” 창에 표시됩니다.
5.3 가공 프로그램 중지/취소
작업 순서
<NC 정지> 키를 눌러 가공 프로그램을 취소합니다. <NC 시작> 키를 눌러 프로그램을 계속 실행합니다.
<리셋> 키를 눌러 현재 실행 중인 프로그램을 중단합니다. <NC 시작> 키를 다시 누르면 중단되었던 프로그램의 처음부터 재시작됩니다.

자동 모드
5.4 취소 후 재실행
5-77 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
5.4 취소 후 재실행
프로그램 취소(리셋) 후에 수동 모드(조그)에서 형상으로부터 공구를 후진시킬 수 있습니다.
작업 순서
자동 모드를 선택합니다.
이 소프트 키를 사용하여 중단 지점을 로드할 수 있는 “블록 탐색” 창을 엽니다.
중단 지점이 로드됩니다.
이 소프트 키를 누르면 중단 지점에 대한 블록 검색이 시작됩니다. 중단된 블록의 시작 위치에 대한 조정이 수행됩니다.
<NC 시작> 키를 눌러 프로그램을 계속 실행합니다.
5.5 중단 후 위치 재지정
프로그램 중단(<NC 정지>) 후 수동 모드(조그)에서 형상으로부터 공구를 후진할 수 있습니다. 제어 시스템에서는 중단 지점의 좌표를 저장합니다. 축의 이동 거리가 표시됩니다.
작업 순서
자동 모드를 선택합니다.
<NC 시작> 키를 눌러 프로그램을 계속 실행합니다.
주의
중단점에 다시 접근할 때 모든 축이 동시에 이동됩니다. 이동 영역에 방해물이 없는지 확인하십
시오.
Block Search
Interr. Point
To contour

자동 모드
5.6 외부 실행
5-78 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
5.6 외부 실행
기능
이 소프트 키를 사용하면 CF 카드를 통해 외부 프로그램을 제어 시스템을 전송할 수 있습니다. 이 프로그램을 실행하려면 <NC 시작>을 누르십시오.
버퍼 메모리의 내용이 처리되고 있는 동안 블록이 자동으로 다시 로드됩니다.
CF 카드에서 프로그램을 실행하는 경우의 작업 순서
요구 사항: 시스템이 리셋 상태여야 합니다.
기계 조작반의 해당 키를 사용하여 자동 모드와 프로그램 관리자를 선택합니다.
이 소프트 키를 선택합니다.
커서를 사용하여 실행할 프로그램을 선택합니다.
이 소프트 키를 선택합니다.
프로그램이 버퍼 메모리로 전송되고 프로그램 선택에서 자동으로 선택 및 표시됩니다.
<NC 시작>을 눌러 프로그램 실행을 시작합니다. 프로그램이 연속으로 다시 로드됩니다.
프로그램이 끝나거나 리셋 상태인 경우 시스템에서 자동으로 프로그램이 제거됩니다.
Customer CF card
Ext. exe- cution

6-79 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
가공 프로그램 작성
작업 순서
<Program Manager> 키를 눌러 프로그램 디렉토리를 엽니다.
그림 6-1 "Program Manager(프로그램 관리자)" 시작 화면
커서 키를 사용하여 프로그램 디렉토리를 검색합니다. 프로그램 이름을 빨리 찾으려면 이름
의 첫 글자만 입력하십시오. 일치하는 문자가 포함된 프로그램으로 커서가 자동으로 이동합
니다.
6

가공 프로그램 작성
6-80 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
소프트 키
이 소프트 키를 누르면 NC 디렉토리가 표시됩니다.
이 소프트 키를 사용하면 커서가 놓여 있는 실행할 프로그램을 선택할 수 있습니다. 시스템이 기계 좌표 화면으로 전환됩니다. 다음에 <NC 시작>을 누르면 이 프로그램이 시작됩니다.
새 프로그램을 작성하려면 새로 작성 소프트 키를 사용합니다.
“열기” 소프트 키를 누르면 커서로 강조 표시된 파일이 처리를 위해 열립니다.
이 소프트 키를 사용하면 후속 작업을 위해 전체 파일을 선택할 수 있습니다. 이 소프트 키를 한 번 더 누르면 선택이 취소됩니다.
참고
개별 파일 선택:
선택할 파일에 커서를 놓고 <선택> 키를 누릅니다. 선택된 줄은 색이 바뀝니다. <선택> 키를
한 번 더 누르면 선택이 취소됩니다.
이 기능은 복사할 파일 목록(“클립보드”)에 하나 이상의 파일을 추가합니다.
이 기능은 복사된 디렉토리나 파일을 현재의 디렉토리 안에 붙여 넣습니다.
선택된 파일을 삭제하고자 하는 경우 “삭제” 소프트 키를 누릅니다. 여러 개의 파일이 선택된 경우 선택된 모든 파일이 삭제됩니다.
삭제하려면 OK(확인) 소프트 키를 선택하고, 취소하려면 Abort(취소)를 선택합니다.
이 소프트 키를 누르면 추가 기능이 표시됩니다.
Rename(이름 변경) 소프트 키를 선택하면 커서를 사용하여 미리 선택한 프로그램의 이름을 변경할 수 있는 창이 열립니다.
새 이름을 입력하고 확인하려면 OK를 누르고, 취소하려면 취소를 누릅니다.
일정한 시간 동안 프로그램에 커서가 놓여 있으면 파일의 처음 7줄을 보여주는 창이 열립
니다.
NC directory
Execute
New
Open
Mark all
Copy
Paste
Delete
More
Rename
Preview window

가공 프로그램 작성
6-81 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
이 소프트 키를 선택하면 RS232 인터페이스를 통해 파일에 입/출력하는 데 필요한 기능과 “외부에서 프로그램 실행” 기능이 제공됩니다. 이 기능을 선택하면 CF 카드의 디렉토리가 표시
됩니다.
커서가 놓인 프로그램을 실행하기 위해 선택하려면 이 소프트 키를 누르십시오. CF 카드가 선택되어 있는 경우 NC는 외부 프로그램으로서 프로그램을 실행합니다. NC의 디렉토리에 저장
되지 않은 가공 프로그램에 대한 어떠한 프로그램 호출도 이 프로그램에 포함되지 않아야 합니다.
파일을 입/출력하는 데 필요한 기능은 RS232 인터페이스를 통해 제공됩니다.
이 기능을 사용하면 클립보드의 파일을 RS232에 연결된 PC로 전송할 수 있습니다.
이 소프트 키를 사용하면 RS232 인터페이스를 통해 파일을 로드할 수 있습니다.
인터페이스 설정에 대해서는 시스템 조작 영역(7장)을 참조하십시오. 가공 프로그램은 텍스트 형식으로 전송해야 합니다.
에러 로그
Customer CF card
Ext. exe- cution
RS232
Send
Receive
Error log

가공 프로그램 작성
6.1 새 프로그램 입력 - “프로그램” 조작 영역
6-82 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
6.1 새 프로그램 입력 – “프로그램” 조작 영역
작업 순서
Program Manager(프로그램 관리자)를 선택했습니다.
NC 디렉토리 또는 사용자 CF 카드 소프트 키를 사용하여 새 프로그램을 저장할 위치를 선택
합니다.
새로 작성 소프트 키를 누릅니다. 그러면 새로운 메인 프로그램 또는 서브루틴의 이름을 입력
할 수 있는 대화 상자가 열립니다. 메인 프로그램의 확장자인 .MPF가 자동으로 입력됩니다. 서브루틴의 확장자인 “.SPF”는 프로그램 이름과 함께 입력해야 합니다.
그림 6-2 새 프로그램 입력 화면
새 프로그램의 이름을 입력합니다.
OK 소프트 키를 눌러 입력을 확인합니다. 새 프로그램 파일이 생성되고, 편집기 창이 자동으
로 열립니다.
취소를 누르면 프로그램 작성이 취소되고 창이 닫힙니다.
NC directory
New

가공 프로그램 작성
6.2 가공 프로그램 편집 - "프로그램" 조작 영역
6-83 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
6.2 가공 프로그램 편집 – “프로그램” 조작 영역
기능
현재 실행되지 않는 가공 프로그램만 편집할 수 있습니다.
가공 프로그램의 수정 내용은 즉시 저장됩니다.
그림 6-3 "프로그램 편집기” 화면
메뉴 트리
그림 6-4 "프로그램" 메뉴 트리(기본 지정)

가공 프로그램 작성
6.2 가공 프로그램 편집 - "프로그램" 조작 영역
6-84 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
작업 순서
“프로그램 관리자”를 사용하여 편집할 프로그램을 선택하고 열기을 눌러 프로그램을 엽니다.
소프트 키
파일을 편집하려면 이 소프트 키를 사용합니다.
선택한 파일을 실행하려면 이 소프트 키를 사용합니다.
이 소프트 키를 누르면 현재 커서 위치까지 텍스트 세그먼트를 선택할 수 있습니다. 또는 <CTRL+B>를 사용할 수도 있습니다.
이 소프트 키를 사용하면 선택한 블록을 클립보드로 복사할 수 있습니다. (또는 <CTRL+B>를 사용할 수도 있습니다.
이 소프트 키를 사용하면 클립보드에 저장된 텍스트를 현재 위치에 붙여 넣을 수 있습니다. 또는 <CTRL+V>를 사용할 수도 있습니다.
이 소프트 키를 사용하면 선택한 텍스트를 삭제할 수 있습니다. 또는 <CTRL+X>를 사용할 수도 있습니다.
Fine(찾기) 소프트 키를 사용하면 프로그램 파일에서 문자열을 검색할 수 있습니다.
입력 줄에 검색할 단어를 입력하고 OK 소프트 키를 누르면 검색이 시작됩니다.
검색을 시작하지 않고 대화 상자를 닫으려면 “취소”를 누릅니다.
현재 커서 위치에서 프로그램 끝까지 블록 번호를 다시 설정하는 데 이 소프트 키를 사용합
니다.
형상 프로그램 작성(“청사진 프로그래밍”)에 대해서는 6.3절 참조
“싸이클” 절 참조
“싸이클” 절(“Transmit” 및 “Tracyl” 옵션) 참조
“싸이클” 절 참조
재컴파일하려면 프로그램의 싸이클 호출 줄에 커서를 놓습니다. 이 기능이 싸이클 이름을 해독하여 관련 파라메타가 있는 화면을 준비합니다. 유효 범위를 벗어나는 파라메타가 있으면 자동으로 기본값이 사용됩니다. 화면이 닫힌 후 처음 파라메타 블록이 수정된 블록으로 바뀝
니다.
참고: 자동으로 생성된 블록만 재컴파일할 수 있습니다.
모의가공은 6.4절에서 설명합니다.
Edit
Execute
Mark block
Copy block
Insert block
Delete block
Find
Renumber
Conteur
Drilling
Milling
Turning
Recompile
Simulation

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-85 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
6.3 형상 정의 프로그래밍
기능
시스템에서 빠르고 안정적으로 가공 프로그램을 작성할 수 있도록 다양한 형상 화면을 제공
합니다. 이러한 화면에서 필요한 파라메타를 입력할 수 있습니다.
형상 화면을 사용하여 다음과 같은 형상 요소나 형상 구간을 프로그램할 수 있습니다.
• 끝점이나 각도를 지정한 직선 구간
• 형상 구간: 직선 - 직선(각도 및 끝점 지정)
• 원 구간(중심점/끝점/반경 지정)
• 형상 구간: 직선 - 원(접선 전이 사용). 각도, 반경 및 끝점을 이용하여 계산
• 형상 구간: 직선- 원(모든 전이 사용). 각도, 중심점 및 끝점을 이용하여 계산
• 형상 구간: 직선 - 원(접선 전이 사용). 각도, 반경 및 끝점을 이용하여 계산
• 형상 구간: 직선- 직선(모든 전이 사용). 각도, 중심점 및 끝점을 이용하여 계산
• 형상 구간: 원 - 직선 - 원(접선 전이 사용)
• 형상 구간: 원 - 원(접선 전이 사용). 중심점, 반경 및 끝점을 이용하여 계산
• 형상 구간: 원 - 원(모든 전이 사용). 중심점, 반경 및 끝점을 이용하여 계산
• 형상 구간: 원 - 원 - 원(접선 전이 사용)
• 형상 구간: 직선 - 원 - 직선 - 원(접선 전이 사용)
그림 6-5 소프트 키 기능
좌표는 절대값, 증분값 또는 극값으로 입력할 수 있습니다. 입력은 “토글” 키를 사용하여 전환
합니다.

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-86 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
소프트 키
이러한 소프트 키를 사용하면 개별 형상 요소들로 분기됩니다.
형상 화면을 처음으로 여는 경우 형상 구간의 시작점을 시스템에 보고해야 합니다. 모든 후속 이동은 이 시작점을 기준으로 합니다. 커서로 입력 막대를 이동하는 경우 모든 값을 다시 입력
해야 합니다.
예를 들어, 직선을 프로그램하려는 경우에는 다음 소프트 키를 누릅니다.
직선 구간 프로그램 작성에 관한 도움말
그림 6-6 시작점 설정
이 대화식 화면에서 다음 형상 구간을 반경 또는 직경 프로그램을 통해 프로그램 작성 여부나 TRANSMIT 또는 TRACYL에 변환 축 사용 여부를 정의합니다.
시작 지점 접근 소프트 키는 입력된 좌표에 접근하는 NC 블록을 생성합니다.
시작점을 설정한 후에는 다음 프로그램 지원 화면이 나타납니다. 예: 직선 세그먼트를 프로그램하는 경우
그림 6-7

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-87 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
절대 치수, 증분 치수(시작점을 기준으로 한 값) 또는 극좌표로 직선의 끝점을 입력합니다. 대화식 화면에 현재 설정이 표시됩니다.
직선과 축 사이의 각도와 좌표 한 개로 끝점을 정의할 수도 있습니다.
극좌표를 통해 끝점이 결정되는 경우 극에 상대적인 벡터의 각도는 물론 극과 끝점 사이의 벡터 길이가 필요합니다. 이 경우 먼저 극을 설정해야 합니다. 이 극점은 새로운 극점이 설정될 때까지 적용됩니다.
[토글-전환] 키를 사용하여 극좌표(POL)를 입력하기로 한 경우 극점을 입력할 때 수직 소프트 키 표시줄의 추가 극 설정 소프트 키를 사용할 수 있습니다.
그림 6-8
극점의 좌표를 입력하는 데 사용되는 대화 상자를 표시합니다. 극점은 선택한 평면으로 기준으로 합니다.
그림 6-9
이 기능을 선택하면 선택된 블록이 급이송 또는 프로그램된 경로 피드로 이동합니다.
Set Pole
GO/G1

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-88 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
필요하면 필드에 추가 기능을 입력할 수 있습니다. 공백, 쉼표 또는 세미콜론을 삽입하여 명령
들을 구분합니다.
그림 6-10
모든 형상 요소에 대해 이 대화식 화면이 제공됩니다.
OK 소프트 키를 누르면 모든 명령이 가공 프로그램에 적용됩니다.
값을 저장하지 않고 대화식 화면 양식의 작업을 중단하려면 취소를 선택합니다.
이 기능은 두 직선 사이의 교점을 계산하는 데 사용됩니다.
두 번째 직선의 끝점의 좌표와 두 직선 사이의 각도를 지정합니다.
그림 6-11 두 직선 사이의 교점 계산
표 6-1 대화식 화면에서 입력
직선 2의 끝점 E 직선의 끝점을 입력합니다.
직선 1의 각도 A1 각도는 0도에서 360도까지 반시계 방향으로 지정합니다.
Addition.– functions
OK
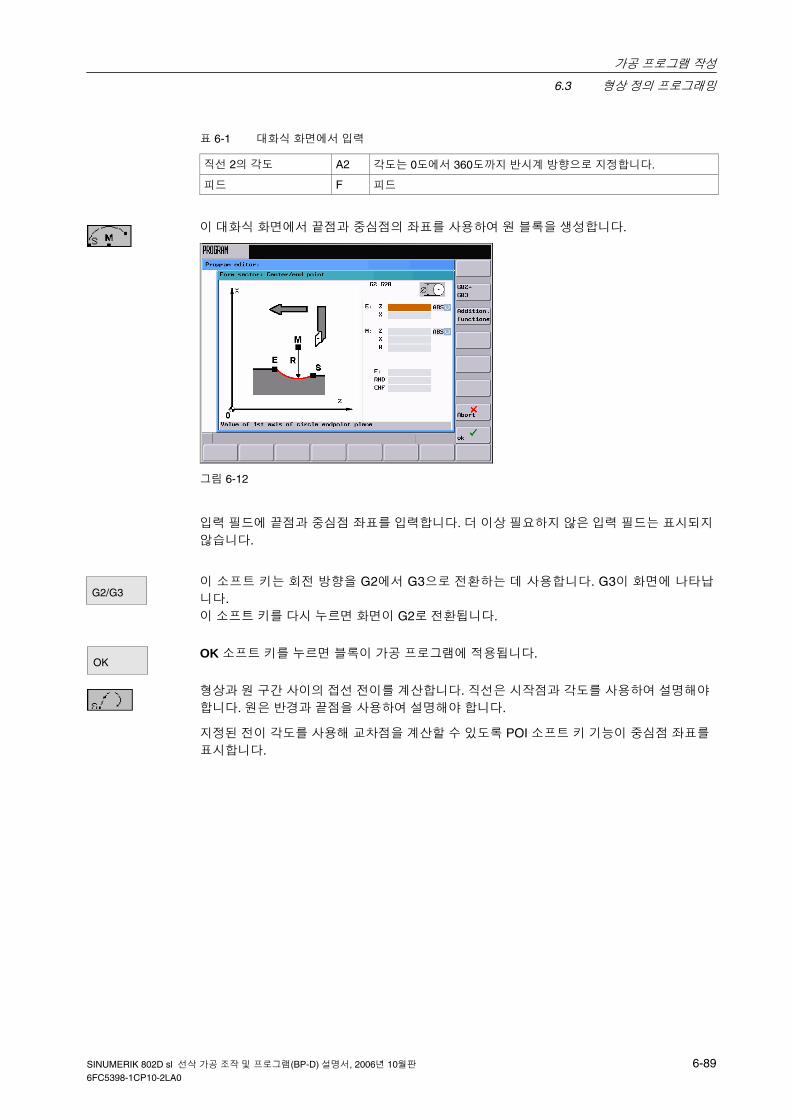
가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-89 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
표 6-1 대화식 화면에서 입력
직선 2의 각도 A2 각도는 0도에서 360도까지 반시계 방향으로 지정합니다.
피드 F 피드
이 대화식 화면에서 끝점과 중심점의 좌표를 사용하여 원 블록을 생성합니다.
그림 6-12
입력 필드에 끝점과 중심점 좌표를 입력합니다. 더 이상 필요하지 않은 입력 필드는 표시되지 않습니다.
이 소프트 키는 회전 방향을 G2에서 G3으로 전환하는 데 사용합니다. G3이 화면에 나타납
니다. 이 소프트 키를 다시 누르면 화면이 G2로 전환됩니다.
OK 소프트 키를 누르면 블록이 가공 프로그램에 적용됩니다.
형상과 원 구간 사이의 접선 전이를 계산합니다. 직선은 시작점과 각도를 사용하여 설명해야 합니다. 원은 반경과 끝점을 사용하여 설명해야 합니다.
지정된 전이 각도를 사용해 교차점을 계산할 수 있도록 POI 소프트 키 기능이 중심점 좌표를 표시합니다.
G2/G3
OK

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-90 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 6-13 직선 - 접선 전이를 사용한 원
표 6-2 대화식 화면에서 입력
원의 끝점 E 원의 끝점을 입력합니다.
직선의 각도 A 각도는 0도에서 360도까지 반시계 방향으로 지정합니다.
원 반경 R 원 반경 입력 필드
피드 F 보간 피드 입력 필드
원 중심점 M 직선과 원 사이에 접선 전이가 없는 경우 원 중심점을 알아야 합니다. 이전 블록에서 선택한 계산의 유형(절대치, 증분치 또는 극좌표)에 따라 지정이 수행됩니다.
이 소프트 키는 회전 방향을 G2에서 G3으로 전환하는 데 사용합니다. G3이 화면에 나타납니
다. 소프트 키를 다시 누르면 G2로 전환됩니다. 화면이 G2로 바뀝니다.
접선 전이와 기타 전이 중에서 선택할 수 있습니다.
이 화면은 입력한 데이터로부터 원 블록과 직선 하나를 생성합니다.
교점이 여러 개일 때는 대화 상자에서 원하는 교점을 선택해야 합니다.
한 좌표가 입력되지 않으면 프로그램이 기존 지정으로부터 좌표를 계산하려고 시도합니다. 가능한 결과가 여러 개일 경우 선택할 수 있도록 대화 상자가 표시됩니다.
이 기능은 형상과 원 구간 사이의 접선 전이를 계산합니다. 원 구간은 시작점과 반경 파라메타
를 사용하여 설명하고 직선은 끝점과 각도 파라메타를 사용하여 설명해야 합니다.
G2/G3
POI

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-91 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 6-14 접선 전이
표 6-3 대화식 화면에서 입력
직선의 끝점 E 직선의 끝점을 절대치, 증분치 또는 극 좌표로 입력합니다.
중심점 M 원 중심점을 절대치, 증분치 또는 극좌표로 입력합니다.
원 반경 R 원의 반경 입력 필드
직선 1의 각도 A 각도는 0도에서 360도까지 반시계 방향으로 지정되고 교차점을 기준
으로 합니다.
피드 F 보간 피드 입력 필드
이 소프트 키는 회전 방향을 G2에서 G3으로 전환하는 데 사용합니다. G3이 화면에 나타납니다. 소프트 키를 다시 누르면 G2로 전환됩니다. 화면이 G2로 바뀝니다.
접선 전이와 기타 전이 중에서 선택할 수 있습니다.
이 화면은 입력한 데이터로부터 원 블록과 직선 하나를 생성합니다.
교점이 여러 개일 때는 대화 상자에서 원하는 교점을 선택해야 합니다.
두 개의 원호 구간 사이에 정접 직선을 삽입합니다. 원 구간은 각각의 중심점과 반경으로 결정
됩니다. 선택한 회전 방향에 따라 생성되는 교차 접점이 다릅니다.
표시된 화면에서 원 구간 1의 중심점과 반경 파라메타, 원 구간 2의 중심점과 반경 파라메타를 입력합니다. 또한 원의 회전 방향도 선택해야 합니다. 현재 설정을 보여주는 도움말 화면이 제공됩니다.
OK를 누르면 입력된 값으로부터 세 개의 블록이 계산되어 가공 프로그램에 삽입됩니다.
G2/G3
POI

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-92 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 6-15
표 6-4 대화식 화면에서 입력
끝점 E 평면의 제 1 및 제 2 형상 축
좌표를 입력하지 않을 경우 이 기능은 삽입한 원 구간과 구간 2 사이 교차점을 제공합니다.
원 1의 중심점 M1 평면의 제 1 및 제 2 형상 축 (절대 좌표)
원 1의 반경 R1 반경 1의 입력 필드
원 2의 중심점 M2 평면의 제 1 및 제 2 형상 축 (절대 좌표)
원 2의 반경 R2 반경 2의 입력 필드
피드 F 보간 피드 입력 필드
이 화면은 입력한 데이터로부터 2개의 원 블록과 1개의 직선을 생성합니다.
이 소프트 키는 두 개 원 구간의 회전 방향을 정의하는 데 사용합니다. 다음 중 선택할 수 있습
니다.
구간 1 구간 2
G2 G3에서),
G3 G2에서),
G2 G2
G3 G3
끝점과 중심점 좌표는 절대 치수, 증분 치수 또는 극좌표로 입력할 수 있습니다. 대화식 화면
에 현재 설정이 표시됩니다.
G2/G3

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-93 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
예 DIAMON
그림 6-16
전제: R1 50 mm R2 100 mm R3 40 mm M1 Z -159 X 69 M2 Z -316 X42 M3 Z -413 X 146
시작점: X = 138, Z = -109 mm(-159 - R50) 점이 시작점으로 간주됩니다.
그림 6-17 시작점 설정
시작점(“시작점 접근 또는 “OK(확인)”)을 확인했으면
화면 을 사용하여 형상 구간 - - 를 계산합니다.
G2/G3 소프트 키를 사용하여 두 개 원 구간(G2|G2)의 회전 방향을 선택하고 파라메타 목록을 채웁니다.
중심점 좌표는 절대 좌표, 즉 영점을 기준으로 하는 X 좌표로 입력해야 합니다.

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-94 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
끝점은 열린 상태로 남습니다.
그림 6-18
화면 양식을 작성한 후에는 OK(확인)를 클릭하여 화면을 닫습니다. 교점이 계산되고 두 개 블럭이 생성됩니다.
그림 6-19 1 단계의 결과
끝점이 열려 있기 때문에
원호 구간 이 있는 직선 의 교점이 다음 형상 정의의 시작점으로 간주됩니다.
형상 구간 - 을 계산하기 위해 화면이 다시 열립니다. 형상 구간의 끝점은 좌표 Z= -413.0과 X=212입니다.
그림 6-20 화면 양식 불러오기

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-95 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
예: DAIMON 작성
그림 6-21 2 단계의 결과
이 기능은 두 개 원 구간 사이의 접선 전이를 계산합니다. 원 구간 1은 시작점, 중심점 및 반경 파라메타를 사용하여 설명하고, 원 구간 2는 끝점과 반경 파라메타를 사용하여 설명해야 합니다.
그림 6-22 접선 전이
표 6-5 대화식 화면에서 입력
원 2의 끝점 E 평면의 제 1 및 제 2 형상 축
원 1의 중심점 M1 평면의 제 1 및 제 2 형상 축
원 1의 반경 R1 원 반경 입력 필드
원 2의 중심점 M2 평면의 제 1 및 제 2 형상 축
원 2의 반경 R2 원 반경 입력 필드
피드 F 보간 피드 입력 필드

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-96 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
이전 블록에서 미리 선택한 계산 유형(절대치, 증분치 또는 극좌표)에 따라 점들이 지정됩니
다. 더 이상 필요하지 않은 입력 필드는 표시되지 않습니다. 중심점 좌표를 한 개만 입력할 경우 반경을 입력해야 합니다.
이 소프트 키는 회전 방향을 G2에서 G3으로 전환하는 데 사용합니다. G3이 화면에 나타납니다. 소프트 키를 다시 누르면 G2로 전환됩니다. 화면이 G2로 바뀝니다.
접선 전이와 기타 전이 중에서 선택할 수 있습니다.
이 화면은 입력한 데이터로부터 두 개의 원 블록을 생성합니다.
교점 선택
교점이 여러 개일 때는 대화 상자에서 원하는 교점을 선택해야 합니다.
그림 6-23 교점 선택
교점 1을 사용하여 형상이 그려집니다.
그림 6-24
G2/G3
POI
POI 1

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-97 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
교점 2를 사용하여 형상이 그려집니다.
그림 6-25
OK(확인)를 누르면 표시된 형상의 교차점이 가공 프로그램에 적용됩니다.
이 기능은 인접한 두 원 구간 사이에 하나의 원 구간을 삽입합니다. 두 개의 원 구간은 각각의 중심점과 반경을 사용하여 설명하고, 삽입된 원 구간은 반경만 사용하여 설명합니다.
원호 구간 1의 중심점과 반경 파라메타, 원호 구간 2의 중심점과 반경 파라메타를 입력할 화면
이 표시됩니다. 또한 삽입되는 원 구간 3의 반경과 회전 방향도 정의해야 합니다.
선택한 설정을 보여주는 도움말 화면이 제공됩니다.
OK를 누르면 입력된 값으로부터 세 개의 블록이 계산되어 가공 프로그램에 삽입됩니다.
그림 6-26 형상 구간 원호-원호-원호를 계산하기 위한 화면 양식
POI 2
OK

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-98 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
표 6-6 대화식 화면에서 입력
끝점 E 평면의 제 1 및 제 2 형상 축
좌표를 입력하지 않을 경우 이 기능은 삽입한 원 구간과 구간 2 사이 교차점을 제공합니다.
원 1의 중심점 M1 평면의 제 1 및 제 2 형상 축
원 1의 반경 R1 반경 1의 입력 필드
원 2의 중심점 M2 평면의 제 1 및 제 2 형상 축
원 2의 반경 R2 반경 2의 입력 필드
원 3의 반경 R3 반경 3의 입력 필드
피드 F 보간 피드 입력 필드
이전 블록으로부터 시작점을 결정할 수 없으면 “시작점” 화면에서 적절한 좌표를 입력합니다.
두 원의 회전 방향을 정의하는 데 이 소프트 키를 사용합니다. 다음 중 선택할 수 있습니다.
구간 1 삽입된 구간 구간 2
G2 G 3 G2에서),
G2 G2 G2에서),
G2 G2 G3에서),
G2 G3 G3에서),
G3 G2 G2에서),
G3 G3 G2에서),
G3 G2 G3에서),
G3 G3 G3
중심점과 끝점은 절대 치수, 증분 치수 또는 극좌표를 사용하여 구할 수 있습니다. 대화식 화면에 현재 설정이 표시됩니다.
G2/G3 G2/G3
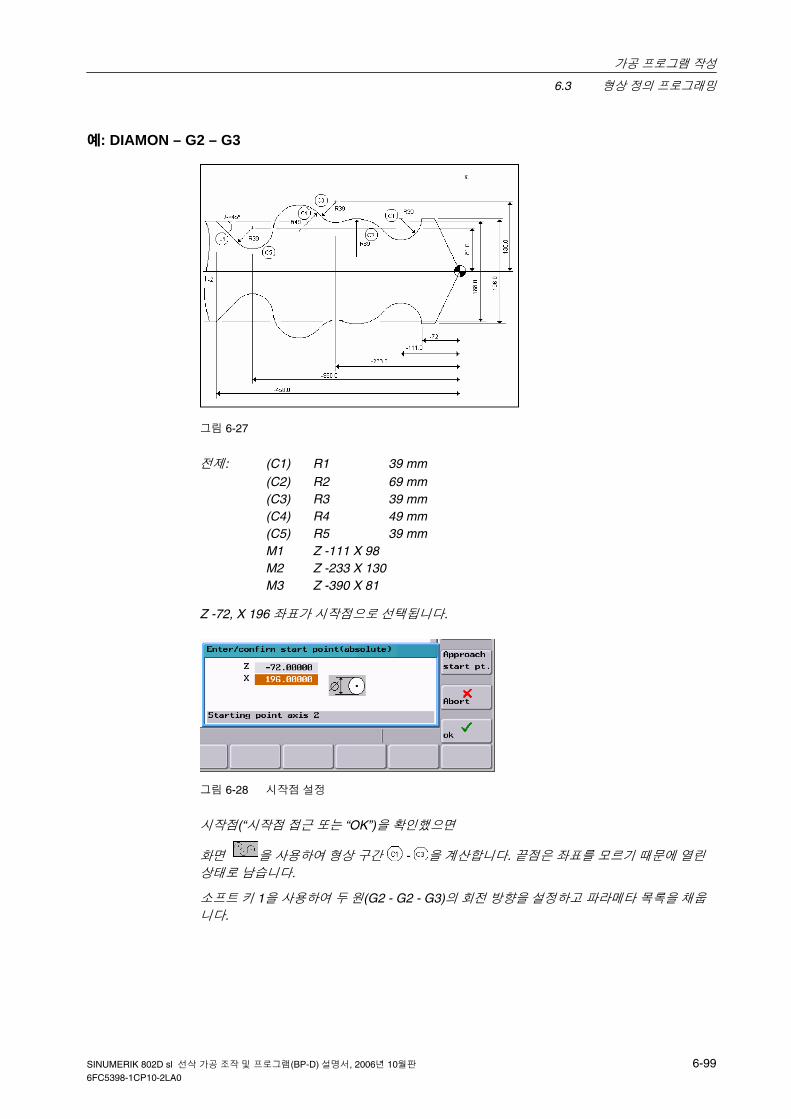
가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-99 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
예: DIAMON – G2 – G3
그림 6-27
전제: (C1) R1 39 mm (C2) R2 69 mm (C3) R3 39 mm (C4) R4 49 mm (C5) R5 39 mm M1 Z -111 X 98 M2 Z -233 X 130 M3 Z -390 X 81
Z -72, X 196 좌표가 시작점으로 선택됩니다.
그림 6-28 시작점 설정
시작점(“시작점 접근 또는 “OK”)을 확인했으면
화면 을 사용하여 형상 구간 - 을 계산합니다. 끝점은 좌표를 모르기 때문에 열린 상태로 남습니다.
소프트 키 1을 사용하여 두 원(G2 - G2 - G3)의 회전 방향을 설정하고 파라메타 목록을 채웁
니다.
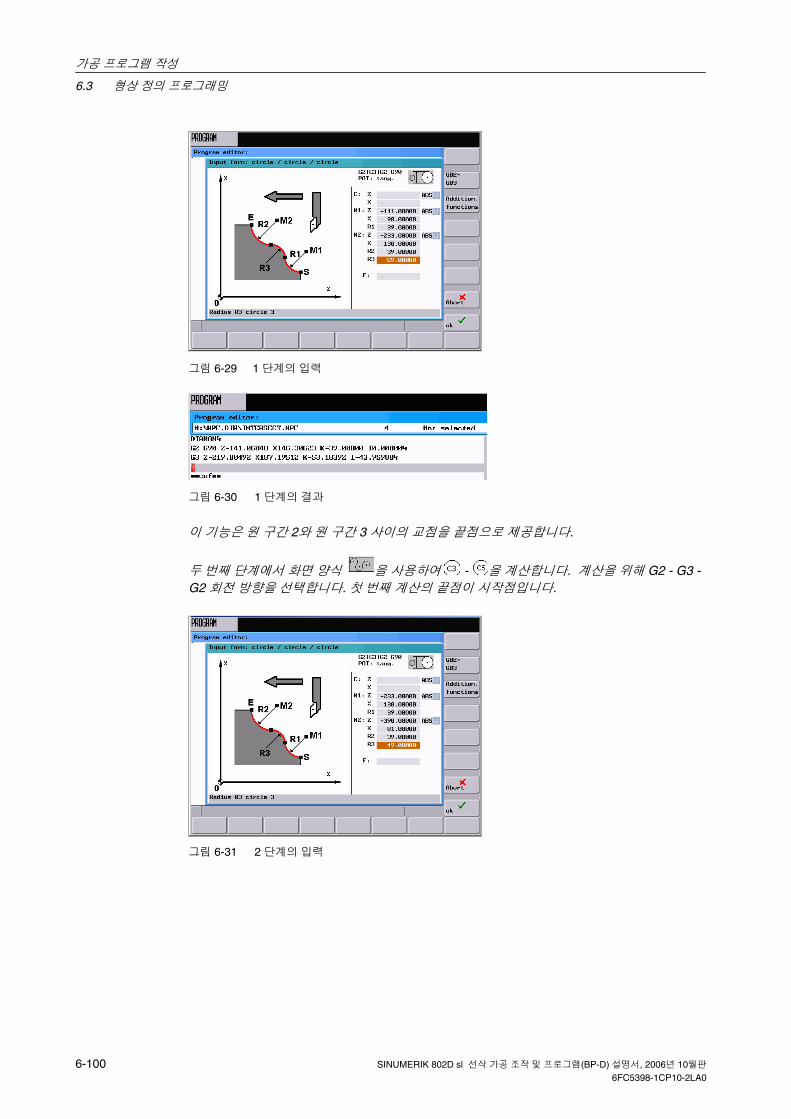
가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-100 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 6-29 1 단계의 입력
그림 6-30 1 단계의 결과
이 기능은 원 구간 2와 원 구간 3 사이의 교점을 끝점으로 제공합니다.
두 번째 단계에서 화면 양식 을 사용하여 - 을 계산합니다. 계산을 위해 G2 - G3 - G2 회전 방향을 선택합니다. 첫 번째 계산의 끝점이 시작점입니다.
그림 6-31 2 단계의 입력

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-101 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 6-32 2 단계의 결과
이 기능은 원 구간 4와 원 구간 5 사이의 교점을 끝점으로 제공합니다.
와 사이의 접선 전이를 계산하려면 “Circle – straight (원 - 직선)” 화면 양식을 사용합니다.
그림 6-33 화면 양식 “원호 – 직선”

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-102 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
예: DIAMON G2 – G3 작성
그림 6-34 3 단계의 결과
이 기능은 두 개의 직선 사이에 원 구간(접선 전이 사용)을 삽입합니다. 원 구간은 중심점과 반경을 사용하여 설명합니다. 두 번째 직선의 끝점의 좌표와 각도 A2(선택적)을 지정합니다. 첫번째 직선은 시작점과 각도 A1을 사용하여 설명합니다.
이 화면은 다음 조건이 충족되는 경우에 사용할 수 있습니다.
RP, AP로 지정된 좌표
시작점 • 직교 좌표계의 두 좌표
• 극좌표 형태의 시작점
원 구간 • 직교 좌표계의 두 좌표와 반경
• 극좌표 형태의 중심점
끝점 • 직교 좌표계의 두 좌표
• 극좌표 형태의 끝점
RP, AP로 지정된 좌표
시작점 • 직교 좌표계의 두 좌표
• 극좌표 형태의 시작점
원 구간 • 직교 좌표계의 한 좌표와 반경
• 각도 A1 또는 A2
끝점 • 직교 좌표계의 두 좌표
• 극좌표 형태의 끝점
이전 블록으로부터 시작점을 결정할 수 없으면 작업자가 시작점을 설정해야 합니다.

가공 프로그램 작성
6.3 형상 정의 프로그래밍
6-103 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 6-35 직선 – 원호 - 직선
표 6-7 대화식 화면에서 입력
직선 2의 끝점 E 직선의 끝점을 입력합니다.
원 중심점 M 평면의 제 1 및 제 2 형상 축
직선 1의 각도 A1 각도는 CCW 방향으로 지정합니다.
직선 2의 각도 A2 각도는 CCW 방향으로 지정합니다.
피드 F 피드 입력 필드
끝점과 시작점은 절대치, 증분치 또는 극좌표로 지정할 수 있습니다. 이 화면은 입력한 데이터
로부터 원 하나와 직선 블록 두 개를 생성합니다.
이 소프트 키는 회전 방향을 G2에서 G3으로 전환하는 데 사용합니다. G3이 화면에 나타납니
다. 소프트 키를 다시 누르면 G2로 전환됩니다. 화면이 G2로 바뀝니다.
G2/G3

가공 프로그램 작성
6.4 모의가공
6-104 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
6.4 모의가공
기능
점선 그래픽을 사용하여 프로그램된 공구 경로를 추적할 수 있습니다.
작업 순서
현재 자동 모드에 있고 실행할 프로그램을 선택한 상태입니다(5.1절 참조).
Simulation
시작 화면이 표시됩니다.
그림 6-36 "모의가공" 시작 화면
<NC 시작>을 누르면 선택한 가공 프로그램의 모의가공이 시작됩니다.
소프트 키
이 소프트 키를 선택하면 기록된 공구 경로의 배율이 자동으로 조정됩니다.
이 소프트 키를 선택하면 배율 조정에 기본 설정이 사용됩니다.
이 소프트 키를 선택하면 전체 공작물이 표시됩니다.
표시된 부분을 축소하려면 이 소프트 키를 누르십시오.
표시된 부분을 확대하려면 이 소프트 키를 누르십시오.
표시 이미지를 삭제하려면 이 소프트 키를 누르십시오.
커서 증분을 변경하려면 이 소프트 키를 누르십시오.
Zoom Auto
To origin
Display All
Zoom +
Zoom -
Delete window
Cursor crs./fine

가공 프로그램 작성
6.5 RS232 인터페이스를 통한 데이터 전송
SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006 년 10 월판 6-105 6FC5398-1CP10-2LA0
6.5 RS232 인터페이스를 통한 데이터 전송
기능
제어 시스템의 RS232 인터페이스를 사용하여 외부 백업 장치로 데이터(가공 프로그램 등)를 출력하거나 외부 장치의 데이터를 읽어올 수 있습니다. RS232 인터페이스와 데이터 백업 장치는 서로 맞아야 합니다.
작업 순서
프로그램 관리자 조작 영역을 선택하였고 이미 작성한 NC 프로그램 개요에 있는 상태입니다.
커서 또는 전체 선택 소프트 키를 사용하여 전송할 데이터를 선택합니다.
그런 다음 데이터를 클립보드로 복사합니다.
RS232 소프트 키를 누르고 원하는 전송 모드를 선택합니다.
그림 6-37 프로그램 출력
송신을 사용하여 데이터 전송을 시작합니다. 클립보드로 복사된 모든 데이터가 전송됩니다.
추가 소프트 키
RS232 인터페이스를 통해 파일을 로드하는 데 이 소프트 키를 사용합니다.
Copy
RS232
Send
Receive

가공 프로그램 작성
6.5 RS232 인터페이스를 통한 데이터 전송
6-106 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
전송 로그 전송된 모든 파일과 상태 정보가 이 로그에 기록됩니다.
• 출력할 파일의 경우 – 파일 이름 – 에러 확인
• 입력할 파일의 경우 – 파일 이름 및 경로 – 에러 확인
전송 메시지:
OK 전송이 완료되었습니다.
ERR EOF 텍스트 끝 문자가 출력되었지만 파일 보관이 완료되지 않았습니다.
Time Out 시간 모니터링에서 데이터 전송 중단을 보고합니다.
User Abort Stop(정지) 소프트 키를 눌러서 데이터 전송을 중단하였습니다.
Error Com COM 1 포트 에러
NC/PLC Error NC에서 에러 메시지
Error Data 데이터 에러
1. 헤더와 함께/헤더 없이 읽어온 파일
또는
2. 파일 이름 없이 천공 테이프 형식으로 파일이 전송되었습니다.
Error File Name NC 명명 규칙을 따르지 않는 파일 이름
Error log

SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006 년 10 월판 7-107 6FC5398-1CP10-2LA0
시스템
기능
“SYSTEM” 영역은 NCK 및 PLC 파라메타 지정 및 분석에 필요한 모든 기능을 제공합니다.
그림 7-1 "SYSTEM" 시작 화면
선택한 기능에 따라 수평, 수직 소프트 키 표시줄가 변경됩니다. 아래 나온 메뉴 표시줄은 수평 소프트 키만 보여줍니다.
Start up PLCServicedisplay
Machinedata
NC
PLC
GeneralMD
AxisMD
ChannelMD
DriveMD
DisplayMD
Serviceaxes
Servicedrives
Serviceprofibus
VersionEdit PLCalarm txt
Step 7connect
PLCstatus
Statuslist
Servotrace
Servotrace
PLCprogram
Programlist
Servicecontrol
802data
CustomerCF card
Start upfiles
RS232
그림 7-2 “System(시스템)” 메뉴 트리(가로 줄 소프트 키)
7 plus

시스템
7-108 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
소프트 키
아래에서는 시작 화면 수직 소프트 키에 대해 설명합니다.
암호 설정
시스템에서 암호 수준을 세 가지로 구분하고 각각 다른 사용 권한을 제공합니다.
• 시스템 암호
• 제조업체 암호
• 사용자 암호
사용 권한(“기술 설명서” 참조)에 따라 변경할 수 있는 데이터가 지정됩니다.
암호를 모르면 접근이 거부됩니다.
참고
SINUMERIK 803D sl “목록”을 참조하십시오.
그림 7-3 암호 입력
OK(확인) 소프트 키를 선택하면 암호가 설정됩니다. 작업을 취소하고 시스템 초기 화면으로 돌아가려면 취소를 누릅니다.
암호 변경
Set password
Change password

시스템
7-109 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 7-4 암호 변경
사용 권한에 따라 소프트 키 표시줄에 암호를 변경할 수 있는 다양한 옵션이 제공됩니다.
적절한 소프트 키를 사용하여 암호 수준을 선택합니다. 새 암호를 입력하고 OK를 누르면 입
력이 완료됩니다. 확인하기 위해 새 암호를 한 번 더 입력하라는 메시지가 표시됩니다.
OK를 누르면 암호 변경이 완료됩니다.
취소를 누르면 작업이 취소되고 기본 화면으로 돌아갑니다.
사용 권한 리셋
네트워크에 사용자 로그인(1.5절 참조)
언어 변경
1차 언어 및 2차 언어 사이에서 전환하는 데 Change language 소프트 키를 사용합니다.
데이터 저장
휘발성 메모리의 내용을 비휘발성 메모리 영역에 저장합니다. 요구 사항: 현재 실행 중인 프로그램이 없어야 합니다.
데이터 백업 중에는 어떠한 작업도 수행하지 마십시오.
Delete password
RCS log-in
Change language
Save data

시스템
7.1 시스템 소프트 키 - 스타트업
7-110 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
7.1 시스템 소프트 키 - 스타트업
스타트업
이 소프트 키를 사용하면 NC 스타트업 모드를 선택할 수 있습니다. 커서를 사용하여 원하는 모드를 선택합니다.
• 일반 NCK 리셋 시스템의 재시작을 수행합니다.
• 기전원 ON시 기본 데이터 로딩 기본값으로 재시작 (공장 출하 설정)
• 전원 ON시 저장된 데이터 로딩 최근에 저장된 데이터를 사용하여 재시작(“데이터 백업” 참조)
PLC를 다음과 같은 모드로 시작할 수 있습니다.
• 재시작 재시작
• 전체 리셋 전체 리셋
또한 후속 디버깅 모드로 시동을 연결할 수도 있습니다.
제어 시스템을 리셋하고 선택한 모드로 재시작을 수행하려면 OK를 선택합니다.
모든 작업을 취소하고 시스템 시작 화면으로 돌아가려면 <화면 복귀>를 누르십시오.
Start up
NC
PLC
OK

시스템
7.2 시스템 소프트 키 (MD)
7-111 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
7.2 시스템 소프트 키(MD)
머신 데이터
머신 데이터에 대한 변경은 기계에 크게 영향을 미칩니다.
그림 7-5 머신 데이터 행의 구조
so 즉시 적용
cf 확인
re 리셋
유효성
po 전원 켜기
!주의
파라메타 설정이 잘못되면 기계가 파손될 수 있습니다.
머신 데이터는 아래 설명한 그룹으로 나뉩니다.
일반 머신 데이터
일반 머신 데이터 창을 엽니다. <페이지 업/다운> 키를 사용하여 앞/뒤로 이동할 수 있습니다.
그림 7-6 "머신 데이터" 시작 화면
축 관련 머신 데이터
“축 관련 머신 데이터” 창을 엽니다. 소프트 키 표시줄에 축 + 및 축 - 소프트 키가 추가됩니다.
Machine data
MD 번호 이름 값 단위 적용방식
10140 TIME_LIMIT_NETTO_DRIVE_TASK
General MD
Axis MD

시스템
7.2 시스템 소프트 키(MD)
7-112 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-7
제 1축의 데이터가 표시됩니다.
다음 축 또는 이전 축의 기계 영역으로 전환하려면 <축 +> 또는 <축 ->를 사용합니다.
검색
검색할 머신 데이터의 번호나 이름(또는 이름의 일부)를 입력하고 OK를 누릅니다.
검색된 데이터로 커서가 이동합니다.
다음 일치 대상을 찾아 검색을 계속하는 데 이 소프트 키를 사용합니다.
활성 머신 데이터 그룹의 다양한 화면표시 필터를 제공합니다. 다음 소프트 키가 추가로 제공
됩니다.
전문가 모드 소프트 키: 전문가 모드에 표시할 모든 데이터 그룹을 선택하는 데 이 소프트 키를 사용합니다.
필터 동작 소프트 키: 선택한 모든 데이터 그룹을 활성화하는 데 이 소프트 키를 사용합니다. 창에서 작업을 중단한 후에는 선택한 데이터만 머신 데이터 화면에 표시됩니다.
전체 선택 소프트 키: 전문가 모드에 표시할 모든 데이터 그룹을 선택하는 데 이 소프트 키를 사용합니다.
전체 선택 해지 소프트 키: 모든 데이터 그룹의 선택을 취소합니다.
Axis +
Axis -
Find
Continue find
Select group

시스템
7.2 시스템 소프트 키 (MD)
7-113 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 7-8 화면표시 필터
채널 머신 데이터
채널 관련 머신 데이터 창을 엽니다. <페이지 업/다운> 키를 사용하여 앞/뒤로 이동할 수 있습
니다.
SINAMICS 드라이브 머신 데이터
“드라이브 머신 데이터” 대화 상자를 엽니다.
최초 대화 상자에 시스템, 전원 공급장치, 드라이브 장치의 상태를 비롯하여 현재의 구성 정보
가 표시됩니다.
그림 7-9 구성 개요
모든 파라메타를 표시하려면 해당 장치에 커서를 놓고 파라메타 표시 소프트 키를 선택합니다. 파라메타에 관한 설명은 SINAMICS 드라이브 설명서를 참조하십시오.
Channel MD
Drive MD

시스템
7.2 시스템 소프트 키(MD)
7-114 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-10 파라메타 목록
디스플레이 머신 데이터
화면 표시 머신 데이터 창을 엽니다. <페이지 업/다운> 키를 사용하여 앞/뒤로 이동할 수 있습
니다.
참고
머신 데이터에 대한 설명은 다음의 제조업체 설명서를 참조하십시오.
SINUMERIK 802D sl “목록”
SINUMERIK 802D sl “기능 설명”
사용자 정의 색상을 설정하는 데 색상번경 소프트 키와 색상 창을 사용합니다. 표시되는 색상
은 빨간색, 녹색, 파란색(RGB) 요소로 구성됩니다.
현재 설명된 값들이 색상 편집 창에 표시됩니다. 이러한 값을 변경하여 원하는 색상을 생성할
수 있습니다. 밝기도 바꿀 수 있습니다.
입력을 완료하면 다음 혼합비가 일시적으로 표시됩니다. 커서 키를 사용하여 입력 필드 사이
를 이동할 수 있습니다.
OK 소프트 키를 선택하면 설정이 적용되고 대화 상자가 닫힙니다. 취소 소프트 키를 선택하면
변경 내용이 저장되지 않고 대화 상자가 닫힙니다.
Display MD
Change Colors

시스템
7.2 시스템 소프트 키 (MD)
7-115 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
팁과 소프트 키 영역의 색을 변경하는 데 사용합니다.
그림 7-11 “색상” 소프트 키
대화 상자의 테두리 색을 변경하는 데 사용합니다.
동작중인 화면 소프트 키 기능은 사용자 설정을 활성 창에 할당하고, 비-활성 화면 기능은 비활
성 창에 할당합니다.
그림 7-12 “색싱” 창
Color SoftKey
Color window

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-116 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
7.3 시스템 소프트 키 - 서비스 화면
이 소프트 키를 누르면 축 서비스 창이 표시됩니다.
축 작업에 관한 정보가 이 창에 표시됩니다.
축 + 또는 축 - 소프트 키가 추가로 표시됩니다. 이 소프트 키를 사용하여 다음 또는 이전 축 값
을 표시할 수 있습니다.
이 창에는 디지털 드라이브에 관한 정보가 표시됩니다.
이 창에는 프로피버스 설정에 관한 정보가 표시됩니다.
작업 로그를 활성화하는 데 이 소프트 키를 사용합니다.
그림 7-13 " 서비스 제어" 화면
네트워크 구성(1.5절 참조)
Service display
Service axes
Service drive
Service PROFIBUS
Service control
Service network

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-117 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
동작로그는 서비스에 사용되는 기능으로, 기록된 모든 이벤트를 목록 형식으로 보여줍니다.
그림 7-14 동작 로그
이 대화 상자를 사용하여 표시할 특정 이벤트를 선택합니다. “전체 데이터 표시”와 “다음의 데이터 그룹 표시” 필드 간에 전환하려면 <TAB> 키를 사용하십
시오.
그림 7-15 동작 로그 설정
표 7-1 데이터 그룹
그룹 의미
키 조작 키보드 입력
시간 스탬프 시간 스탬프
화면 관리 에러 메시지 Windows 관리자가 생성한 에러 메시지(시스템 내부 전용)
운영 체제 알람 메시지 QW 운영 체제에서 생성된 에러 메시지(시스템 내부 전용)
TCS 알람 메시지 ORB(객체 요청 브로커)가 생성한 에러 메시지(시스템 내부 전용)
Action log
Setting
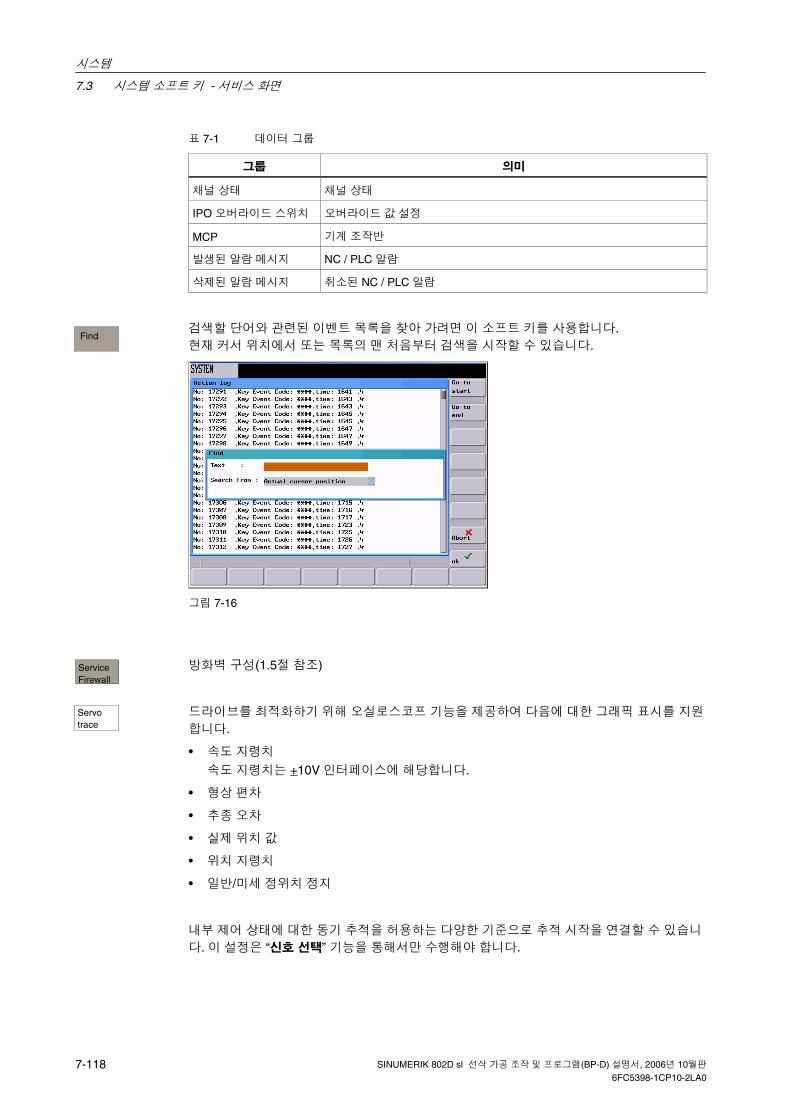
시스템
7.3 시스템 소프트 키 - 서비스 화면
7-118 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
표 7-1 데이터 그룹
그룹 의미
채널 상태 채널 상태
IPO 오버라이드 스위치 오버라이드 값 설정
MCP 기계 조작반
발생된 알람 메시지 NC / PLC 알람
삭제된 알람 메시지 취소된 NC / PLC 알람
검색할 단어와 관련된 이벤트 목록을 찾아 가려면 이 소프트 키를 사용합니다. 현재 커서 위치에서 또는 목록의 맨 처음부터 검색을 시작할 수 있습니다.
그림 7-16
방화벽 구성(1.5절 참조)
드라이브를 최적화하기 위해 오실로스코프 기능을 제공하여 다음에 대한 그래픽 표시를 지원
합니다.
• 속도 지령치
속도 지령치는 +10V 인터페이스에 해당합니다.
• 형상 편차
• 추종 오차
• 실제 위치 값
• 위치 지령치
• 일반/미세 정위치 정지
내부 제어 상태에 대한 동기 추적을 허용하는 다양한 기준으로 추적 시작을 연결할 수 있습니
다. 이 설정은 “신호 선택” 기능을 통해서만 수행해야 합니다.
Find
Service Firewall
Servo trace

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-119 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
결과를 분석하는 데 사용하도록 다음 기능이 제공됩니다.
• 가로 좌표 및 세로 좌표 변경 및 배율 조정
• 가로 또는 세로 마커를 사용하여 값 측정
• 두 마커 위치 사이의 차이로서 가로 좌표 및 세로 좌표 값 측정
• 가공 프로그램 디렉토리의 파일로 결과 저장 그 후에 RCS802 또는 CF 카드를 사용하여 파일을 내보내어 MS Excel에서 데이터를 처리할 수 있습니다.
그림 7-17 서보 트레이스 시작 화면
다이어그램 헤더에 가로 좌표의 현재 스케일과 마커 사이의 차이가 표시됩니다.
커서를 사용하여 볼 수 있는 화면 영역으로 위의 그림을 이동할 수 있습니다.
그림 7-18 필드의 의미
측정 채널의 파라메타를 지정하는 데 이 메뉴를 사용합니다.
Select signal

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-120 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-19
• 축 선택: 축을 선택하려면 “축” 전환 필드를 사용합니다. • 신호 형식: 추종 에러
제어 편차
컨투어 편차
실제 위치 값
실제 엔코더 속도 값
드라이브 속도 지령 값
보정값
파라메타 블록
제어기 입력 위치 지령치
제어기 입력 속도 지령치
제어기 입력 가속도 지령치
속도 피드포워드 제어 값
“미세 정위치 정지” 신호
“일반 정위치 정지” 신호
• 상태: ON 이 채널에서 추적이 수행됩니다. OFF 채널 비활성화
채널 1의 측정 시간 및 트리거 유형에 대한 파라메타는 화면의 아래쪽 창에서 설정할 수 있습
니다. 나머지 채널에는 이 설정이 적용됩니다.
• 측정 시간 결정: “측정 시간” 입력 필드에 직접 ms 단위 측정 시간을 입력합니다(최대값 6,133 ms).
• 트리거 조건 선택: “트리거 조건” 필드에 커서를 놓고 전환 키를 사용하여 해당하는 조건을 선택합니다.
– 트리거 없음. 즉, “즉시” 소프트 키를 선택하자 마자 측정이 바로 시작됩니다.
– 상승 에지
– 하강 에지
– 미세 정위치 정지
– 일반 정위치 정지
눈금선을 숨기거나 표시하려면 마커 표시/마커 숨기기 소프트 키를 사용합니다.
Marker V-OFF
Marker T-OFF

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-121 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
가로 또는 세로 방향 차이를 결정하는 데 마커를 사용합니다. 방향 차이를 결정하려면 이 끝에 시작점에 마커를 놓고 “V 마크 고정” 또는 “T 마크 고정” 소프트 키를 선택합니다. 시작점과 현재 마커 위치 사이의 차이가 상태 표시줄에 표시됩니다. 소프트 키 명칭이 “V 마크 자유이동)” 또는 “T 마크 자유이동”로 변경됩니다.
다이어그램을 숨기거나 표시하는 데 사용하는 소프트 키를 제공하는 다른 수준의 메뉴를 엽니다. 검은색 배경에 소프트 키가 표시되는 경우 선택된 추적 채널에 대한 다이어그램이 표시
됩니다.
시간 기준을 확대/축소합니다.
해상도(폭)를 증가/감소시킵니다.
마커의 눈금 크기를 정의하는 데 이 소프트 키를 사용합니다.
그림 7-20
마커는 커서 키를 사용하여 1단계 크기씩 이동합니다. 입력 필드를 사용하여 단계 크기를 더 크게 설정할 수 있습니다. 이 값은 <SHIFT>를 누른 상태에서 커서를 이동할 때마다 몇 개의 눈금 단위를 이동해야 하는지 지정합니다. 마커가 다이어그램의 끝에 도달하면 자동으로 눈금
이 가로 또는 세로 방향으로 나타납니다.
트레이스 데이터를 저장하거나 로드하는 데 이 소프트 키를 사용합니다.
Show trace
FIX V-Mark
FIX T-Mark
Time scale +
Time scale -
Vertical scale +
Vertical scale -
Marker steps
File service

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-122 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림. 7–21
원하는 파일 이름을 확장자 없이 “파일 이름” 필드에 입력합니다.
가공 프로그램 디렉토리에 있는 특정 파일 이름으로 데이터를 저장하려면 저장 소프트 키를 사용합니다. 저장한 후 파일을 내보내고 MS Excel에서 데이터를 처리할 수 있습니다.
지정한 파일을 로드하여 데이터를 그래픽으로 표시하려면 로드 소프트 키를 사용합니다.
이 창에는 개별 CNC 구성 요소의 버전 번호 및 작성일이 표시됩니다.
HMI 세부사항은 정비 작업에 사용되는 메뉴로, 사용자 암호 수준에서만 접근할 수 있습니다. 장비에서 제공하는 모든 프로그램이 각각의 버전 번호와 함께 표시됩니다. 소프트웨어 구성 요소를 다시 로드하면 버전 번호가 달라질 수 있습니다.
그림 7-22 "HMI 세부사항" 메뉴 영역
이 기능은 시작될 프로그램에 대한 하드 키(기능 키 “기계 좌표”, “옵셋”, “프로그램” 등) 할당을 목록 형태로 표시합니다. 각 열의 의미에 대해서는 아래 표를 참조하십시오.
Version
HMI details
Registry details

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-123 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 7-23
표 7-2 [DLL 배열] 항목의 의미
식별자 의미
소프트 키 SK1 ~ SK7 하드 키 할당은 1 ~ 7
DLL 이름 실행할 프로그램의 이름
구분 이름 수신 메시지의 식별자
시작 방법 프로그램을 시작한 후 실행할 기능 번호
실행 플래그 0 - 기본 시스템을 통해 프로그램이 관리됩니다.
1 - 기본 시스템이 프로그램을 시작하고 제어권을 로드된 프로그램에 전달합니다.
문자 파일 텍스트 파일의 이름(확장자 없슴)
SK ID 예약됨
암호 레벨 프로그램의 실행이 암호 수준에 따라 허용됩니다.
구분 SK 예약됨
SK 파일 예약됨
로드된 문자 세트의 데이터를 목록 형태로 표시합니다.
Font details

시스템
7.3 시스템 소프트 키 - 서비스 화면
7-124 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-24
시작 프로그램 정의
시스템을 부팅하면 “기계 좌표” 조작 영역(SK 1)이 자동으로 시작됩니다. 다른 방식으로 시작
하고 싶으면 이 기능을 사용하여 다른 시작 방식을 정의할 수 있습니다.
프로그램을 부팅한 후 시작할 프로그램 번호(“소프트 키” 열)를 여기에 입력합니다.
그림 7-25 스타트업 DLL 변경
Change Start DLL

시스템
7.4 시스템 소프트 키 - PLC
7-125 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
7.4 시스템 소프트 키 - PLC
PLC 진단 및 스타트업에 사용할 추가 기능을 제공합니다.
STEP 7로 연결하기 위한 인터페이스 파라메타에 대한 구성 대화 상자를 엽니다(“통신” 절의 프로그램 작성 도구에 대한 설명 참조).
데이터 전송으로 RS232 인터페이스가 이미 사용되고 있는 경우, 전송이 완료된 경우에만 프로그램 작성 도구에 시스템을 연결할 수 있습니다.
연결이 작동되면서 RS232 인터페이스가 초기화됩니다.
그림 7-26 전송 속도 설정
전송 속도는 토글/SELECT를 사용하여 설정합니다. 설정할 수 있는 값: 9600/19200/38400/57600/115200.
시스템과 PC/PG 사이의 연결을 활성화하는 데 이 소프트 키를 사용합니다. 프로그램 작성 도구에 대한 호출을 대기합니다. 이 상태에서는 어떠한 설정도 수정할 수 없습니다. 소프트 키 이름이 연결 off로 바뀝니다. 언제든지 연결 off를 선택하면 시스템으로부터 전송이 중단됩니다. 이제 다시 설정을 변경할 수 있습니다.
전원을 켠 후에도 활성 또는 비활성 상태가 유지됩니다(기본 데이터를 사용한 스타트업 제외). 상태 표시줄에 활성 연결이 기호로 표시됩니다(표 1-2 참조).
메뉴를 닫으려면 <화면 복귀>를 누릅니다.
이 기능을 사용하여 PLC 사용자 알람 텍스트를 삽입하거나 수정할 수 있습니다. 커서를 사용
하여 원하는 알람 번호를 선택합니다. 동시에 현재 유효한 텍스트가 입력 줄에 표시됩니다.
PLC
STEP 7 connect
Connect off
Connect on
Edit PLC alarm txt

시스템
7.4 시스템 소프트 키 - PLC
7-126 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-27 PLC 알람 텍스트 편집
입력 줄에 새로운 텍스트를 입력합니다. 입력이 끝나면 <Input> 키를 누르고 저장을 선택하여
저장합니다.
텍스트 표기법에 대해서는 스타트업 설명서를 참조하십시오.

시스템
7.5 시스템 소프트 키 - 스타트업 파일
7-127 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
7.5 시스템 소프트 키 - 스타트업 파일
스타트업 백업 파일과 PLC 프로젝트를 작성하고 읽어오거나 내보내는 데 사용됩니다(7.6절
참조).
이 창에는 트리 구조에서 선택한 드라이브의 내용이 표시됩니다.
가로줄의 소프트 키는 선택할 수 있는 드라이브를 목록 형태로 보여줍니다. 세로줄의 소프트
키는 문제의 드라이브에 사용할 수 있는 제어 기능을 제공합니다.
다음은 고정된 기본 할당입니다.
• 802D 데이터 스타트업 데이터
• 사용자 CF 카드 CF 카드의 사용자 데이터
• RS232 직렬 인터페이스
데이터는 “복사 및 붙여넣기” 기능으로 처리합니다.
그림 7-28 스타트업 파일
“802D 데이터” 영역의 개별 데이터 그룹은 다음과 같은 의미를 갖습니다.
• 데이터: 머신 데이터 셋팅 데이터 공구 데이터 R 파라메타 워크 옵셋 보정: 리드스크류 에러 전역 사용자 데이터
이러한 데이터는 특수한 초기화 데이터며 ASCII 파일로 전송됩니다.
• 스타트업 백업 파일(NC/PLC): NC 데이터 NC 디렉토리 화면표시 데이터 보정: 피치 에러 PLC 사용자 알람 텍스트 PLC 프로젝트 드라이브 머신 데이터
이러한 데이터는 NC 및 PLC 데이터의 스타트업 파일을 구성하며, HMI 백업 형식을 사용
한 이진 형식으로 전송됩니다.
Start up files
802D data

시스템
7.5 시스템 소프트 키 - 스타트업 파일
7-128 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
• 스타트업 백업 파일(HMI) 사용자 싸이클 사용자 디렉토리 언어 파일, 언어1 언어 파일, 언어2 시작 화면 온라인 도움말 HMI 비트맵
이러한 데이터는 HMI 데이터의 스타트업 파일을 구성하며, HMI 백업 형식을 사용한 이진 형식으로 전송됩니다.
• PLC 프로젝트(PT802D *.PTE)
PLC 프로젝트의 처리를 지원함으로써 제어 시스템과 프로그램 작성 도구 사이에서 데이
터 변환 없이 직접 교환할 수 있습니다.
이 기능은 콤팩트 플래시 카드를 통해 데이터를 교환하는 데 사용합니다. 다음과 같은 기능이 지원됩니다.
커서를 사용하여 미리 선택한 파일의 이름을 바꾸는 데 이 기능을 사용합니다.
CF 카드에 새 디렉토리를 만드는 데 이 소프트 키를 사용합니다.
하나 또는 여러 개의 파일을 클립보드로 복사하는 데 이 소프트 키를 사용합니다.
클립보드의 파일이나 디렉토리를 현재 디렉토리에 붙여 넣는 데 이 소프트 키를 사용합니다.
... 선택한 파일 이름을 지정 목록에서 삭제합니다.
후속 작업에 사용할 전체 파일을 선택하는 데 이 소프트 키를 사용합니다.
RS232 인터페이스를 통해 데이터를 입력하거나 출력하는 데 이 소프트 키를 사용합니다.
인터페이스 파라메타를 표시하고 변경하는 데 이 기능을 사용합니다. 설정의 변경 내용은 즉시 적용됩니다.
저장 소프트 키를 선택할 경우 스위치가 꺼져 있어도 선택된 설정이 저장됩니다.
기본 설정 소프트 키를 누르면 모든 설정이 기본 설정으로 리셋됩니다.
Customer CF card
Rename
New directory
Copy
Paste
Delete
Mark all
RS232
Settings

시스템
7.5 시스템 소프트 키 - 스타트업 파일
7-129 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 7-29 RS232 인터페이스의 파라메타
인터페이스 파라메타
표 7-3 인터페이스 파라메타
파라메타 설명
디바이스 RTS/CTS RTS(전송 요청) 신호는 데이터 전송 장치의 전송 모드를 제어합니다. 능동: 데이터가 전송됩니다. 수동: 데이터 전송이 모두 끝난 후에만 전송 모드가 종료됩니다.
CTS 신호는 RTS에 대한 응답 확인 신호로 데이터를 전송할 준비가 되었음을 나타냅니다.
통신속도 ... 인터페이스 전송 속도를 설정하는 데 사용됩니다.
300 baud 600 baud 1200 baud 2400 baud 4800 baud 9600 baud 19200 baud 38400 baud 57600 baud 115200 baud
정지비트 비동기 전송에서의 정지 비트 수
입력: 1 정지 비트(기본값) 2 정지 비트
패리티 에러 검출을 위해 패리티 비트를 사용합니다. 패리티 비트는 코드화된 문자에 추가되어 “1”로 설정된 자리수를 홀수 또는 짝수 숫자로 변환합니다.
입력: 패리티 없음(기본 설정) 짝수 패리티 홀수 패리티

시스템
7.5 시스템 소프트 키 - 스타트업 파일
7-130 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
표 7-3 인터페이스 파라메타
파라메타 설명
데이터 비트 비동기 전송에서의 데이터 비트 수 입력: 7개의 데이터 비트 8 데이터 비트(기본값)
덮어쓰기 승인
Y: 파일을 읽어올 때 NC에 이미 있는 파일인지 확인합니다.
N: 확인 경고 없이 파일을 덮어씁니다.

시스템
7.6 스타트업 백업 파일 생성/불러오기/저장
7-131 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
Start upfiles
plus
7.6 스타트업 백업 파일 생성/불러오기/저장
참고
/BA1/ SINUMERIK 802D sl “조작 설명서”의 “데이터 백업 및 가공 시리즈 스타트업”절
작업 순서
“시스템” 영역에서 스타트업 파일 소프트 키를 선택합니다.
스타트업 파일 생성
모든 구성 요소 또는 선택한 일부 구성 요소만 사용하도록 스타트업 백업 파일을 작성할 수 있
습니다.
선택한 구성 요소만 사용하는 보관 파일을 작성하려면 다음과 같은 작업을 수행해야 합니다.
방향 키를 사용하여 802D 데이터 메뉴에서 스타트업 백업파일 (NC/PLC)를 선택합니다.
<INPUT> 키를 눌러 디렉토리를 열고 커서 키를 사용하여 원하는 행을 선택합니다.
복사 소프트 키를 선택하여 파일을 클립보드로 복사합니다.
그림 7-30 전체 스타트업 백업 파일 복사
802D data
Copy

시스템
7.6 스타트업 백업 파일 생성/불러오기/저장
7-132 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
콤팩트 플래시 카드에 스타트업 백업 파일 저장
요구 사항: CF 카드를 삽입하면 스타트업 백업 파일이 클립보드로 복사됩니다.
작업 순서:
사용자 CF 카드를 선택하고 저장 위치(디렉토리)를 선택합니다.
붙여넣기 소프트 키를 선택하면 스타트업 백업 파일이 생성됩니다.
이제 나타나는 대화 상자에서 제공된 이름을 확인하거나 새 이름을 입력하고 OK를 클릭하여 대화 상자를 닫습니다.
그림 7-31
Customer CF card
Paste

시스템
7.6 스타트업 백업 파일 생성/불러오기/저장
7-133 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
RS232를 통해 스타트업 백업 파일 저장 요구 사항: 스타트업 백업 파일을 클립보드로 복사했고 RS232 연결이 설정되어 있어야 합니다.
작업 순서:
RS232 메뉴를 선택하고 송신을 클릭합니다.
PC에서:
• WinPCIN을 시작합니다.
• 이진 전송 모드를 활성화합니다.
• Receive Data(데이터 수신) 메뉴를 선택하고 파일 이름을 정의합니다.
먼저 모든 데이터를 읽어와 버퍼 메모리에 기록합니다. 모든 데이터가 메모리에 되면, 자동으
로 전송 프로세스가 시작되어 PC(WinPCIN)가 데이터를 수신하게 됩니다.
보관 파일을 작성하는 동안 에러가 발생하면(예, 드라이브 꺼짐 등의 에러), 데이터가 전송되
지 않습니다. 생성 프로세스와 에러를 보여주는 로그 창이 표시됩니다.
RS232를 통해 스타트업 백업 파일 불러오기
스타트업 백업 파일을 가져오려면 다음 작업을 수행하십시오.
RS232 메뉴를 선택하고 수신을 사용하여 가져옵니다.
PC에서:
• WinPCIN을 시작합니다.
• 이진 전송 모드를 활성화합니다.
• 스타트업 백업 파일을 열고 “Send Data (데이터 전송)”을 선택하여 데이터 전송을 시작합
니다.
• 제어 시스템에 표시되는 시작 대화 상자를 닫습니다.
RS232
Send
RS232
Receive

시스템
7.7 PLC 프로젝트 불러오기/저장
7-134 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
콤팩트 플래시 카드의 스타트업 백업 파일 불러오기
스타트업 백업 파일을 불러오려면 다음 작업을 수행하십시오.
1. CF 카드를 넣습니다.
2. 사용자 CF 카드 소프트 키를 선택하고 원하는 보관 파일이 있는 줄을 선택합니다.
3. 복사를 사용하여 클립보드로 파일을 복사합니다.
4. 802D 저장 소프트 키를 누르고 스타트업 백업 파일 (NC/PLC) 행에 커서를 놓습니다.
5. 붙여넣기를 선택하여 스타트업을 시작합니다.
6. 제어 시스템에 표시되는 시작 대화 상자를 닫습니다.
7.7 PLC 프로젝트 불러오기/저장
입력된 프로젝트는 PLC의 파일 시스템으로 전송된 다음 활성화됩니다. 활성화 작업을 완료
하기 위해 제어 시스템이 다시 시작됩니다.
콤팩트 플래시 카드에서 프로젝트 불러오기
PLC 프로젝트를 불러오려면 다음 작업을 수행합니다.
1. CF 카드를 넣습니다.
2. 사용자 CF 카드 메뉴에서 필요한 프로젝트 파일(PTE 형식)이 있는 줄을 선택합니다.
3. 복사를 사용하여 클립보드로 파일을 복사합니다.
4. 802D 저장 메뉴를 선택하고 PLC 프로젝트 (PT802D *.PTE) 행에 커서를 놓습니다.
5. 붙여넣기를 선택하여 프로젝트를 가져와서 활성화합니다.
콤팩트 플래시 카드에 프로젝트 저장
다음 작업을 수행합니다.
1. CF 카드를 넣습니다.
2. 방향 키를 사용하여 802D 저장 메뉴에서 PLC 프로젝트 (PT802D *.PTE) 행을 선택합니다.
3. 복사 소프트 키를 선택하여 파일을 클립보드로 복사합니다.
4. 사용자 CF 카드 메뉴를 선택합니다.
5. 저장 위치를 검색하고 붙여넣기 소프트 키를 선택합니다.

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-135 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
7.8 래더 다이어그램으로 표시되는 PLC 진단
기능
PLC 사용자 프로그램은 안전 기능을 인지하고 일련의 프로세스 순서를 지원하는 수많은 논리 연산들로 구성됩니다. 이러한 논리 연산에는 다양한 접점과 릴레이 연결이 포함됩니다. 그로 인해 단 하나의 접점이나 릴레이 장애가 전체 시스템/설치 장애를 유발합니다.
결함/장애 또는 프로그램 에러를 찾는 데 사용되는 다양한 진단 기능이 “시스템” 조작 영역에 제공됩니다.
참고
여기서 프로그램을 편집할 수는 없습니다.
작업 순서
“시스템” 영역에 있는 PLC 소프트 키를 선택합니다.
영구 메모리에 저장된 프로젝트가 열립니다.
7.8.1 화면 레이아웃
몇 가지 주 영역들로 분할되는 화면 레이아웃은1.1절에서 이미 설명한 레이아웃과 동일합니
다. PLC 진단과 관련된 모든 수정 사항과 하위 기능들이 아래 요약되어 있습니다.
plus
PLC
PLC program

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-136 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-32 화면 레이아웃
화면 항목 디스플레이 의미
1
애플리케이션 영역
2
지원되는 PLC 프로그램 언어
3
활성 프로그램 블록의 이름
표시: 기호 이름(절대 이름)
프로그램 상태
RUN 프로그램 실행 중
STOP 프로그램 중지
애플리케이션 영역의 상태
Sym 명칭주소 표시
4
abs 절대번지 표시
5 활성 키 디스플레이
6
초점
커서의 작업을 수행함
7 팁 행
검색할 참고 사항을 표시함
7.8.2 작업 옵션
이 영역에는 소프트 키와 검색 키 외에 여러 가지 키 조합이 추가로 제공됩니다.
단축 키
커서 키는 PLC 사용자 프로그램에서 초점을 이동합니다. 창 경계에 도달하면 자동으로 화면 이동됩니다.

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-137 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
표 7-4 키 조합
키 조합 동작
또는
CTRL
행의 첫 번째 줄로
또는 CTRL
행의 마지막 줄로
한 화면 위로
한 화면 아래로
한 필드 왼쪽으로
한 필드 오른쪽으로
한 필드 위로
한 필드 아래로
또는 CTRL
첫 번째 네트워크의 첫 번째 필드로
또는
CTRL
첫 번째 네트워크의 마지막 필드로
같은 창에 다음 프로그램 블록을 엽니다.
같은 창에 이전 프로그램 블록을 엽니다.
선택 키의 기능은 입력 초점의 위치에 따라 달라집니다.
• 표 줄: 완전한 텍스트 줄을 표시함
• 네트워크 제목: 네트워크 설명을 표시합니다.
• 명령: 완전한 변수들을 표시합니다.
입력 초점이 명령에 놓여 있으면 설명을 포함한 모든 변수가 표시됩니다.

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-138 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
소프트 키
“PLC Info(PLC 정보)” 메뉴는 PLC 모델, PLC 시스템 버전, 싸이클 시간 및 PLC 사용자 프로
그램 런타임을 표시합니다.
그림 7-33 PLC 정보
화면의 데이터를 새로 고치는 데 이 소프트 키를 사용합니다.
프로그램을 실행하는 동안 모니터링 및 변경 작업에 “PLC 상태”를 사용합니다.
그림 7-34 PLC 상태 화면
PLC 신호를 표시하고 수정하려면 PLC 상태 목록을 사용합니다.
PLC info
Reset pro. time
PLC status
Status list

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-139 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 7-35 상태 목록
해당 프로그램 블록에서 실행 중인 PLC 프로그램의 모든 논리 및 그래픽 정보를 표시합니다.
LAD(래더 다이어그램)의 논리는 명확한 구조의 프로그램 부분과 네트워크라고 하는 현재 경
로로 나뉩니다. 일반적으로 LAD 프로그램은 다양한 논리 연산을 사용한 전류 흐름을 나타냅
니다.
그림 7-36 OB1 창
이 메뉴에서 변수의 기호 표시와 절대 번지 표시 사이에서 전환할 수 있습니다. 다양한 확대/축소 인자를 사용하여 프로그램 단편을 표시할 수 있습니다. 변수를 쉽게 찾을 수 있도록 검색 기능이 제공됩니다.
이 소프트 키를 사용하여 PLC 프로그램 블록의 목록을 표시할 수 있습니다. 커서 위로/커서 아
래로 또는 페이지 업/다운 키를 사용하여 열려고 하는 PLC 프로그램을 선택합니다. 현재 프로
그램 블록은 목록 상자의 정보 줄에 표시됩니다.
Window 1 OB1
Program block

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-140 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-37 PLC 블록 선택
이 소프트 키를 선택하면, 선택한 프로그램 블록(PLC 프로젝트를 작성할 때 저장한 블록)에 대한 설명이 표시됩니다.
그림 7-38 선택한 PLC 프로그램 블록의 속성
이 소프트 키를 선택하면 선택한 프로그램 블록의 로컬 변수 표가 표시됩니다.
두 가지 유형의 프로그램 블록이 있습니다.
• OB1 임시 로컬 변수만
• SBRxx 임시 로컬 변수
프로그램 블록마다 변수 표가 하나씩 있습니다.
Proper- ties
Local variables

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-141 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 7-39 선택한 프로그램 블록의 로컬 변수 표
모든 테이블에서 열 너비보다 긴 텍스트는 잘리고 “~” 문자가 첨가됩니다. 이러한 경우 변수 테이블에는 현재 커서 위치의 텍스트가 표시되는 한 단계 상위 수준 텍스트 필드가 있습니다. “~”가 표시되면서 잘린 텍스트는 한 단계 상위 수준 텍스트 필드에 커서와 동일한 색으로 표시
됩니다. 긴 텍스트의 경우, 선택 키를 눌러서 전체 텍스트를 표시할 수 있습니다.
이 소프트 키를 누르면 선택한 프로그램 블록이 열리고 “창 1/2” 소프트 키에 프로그램 블록 이름(절대값)이 표시됩니다.
프로그램 상태 표시를 설정/해제하는 데 이 소프트 키를 사용합니다. 여기에서 PLC 싸이클의 끝부터 시작하여 네트워크의 현재 상태를 감시할 수 있습니다. LAD(래더) “프로그램 상태”에는 모든 연산자의 상태가 표시됩니다. 상태는 여러 개의 PLC 싸이클에서 상태 표시 값을 얻어
서 상태 표시 정보를 새로 고칩니다.
그림 7-40 "프로그램 상태" ON – 심볼 표시
Open
Program stat. OFF
Program stat. ON

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-142 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-41 "프로그램 상태" ON – 절대 번지 표시
변수의 절대 번지 표시와 명칭 표시 사이를 전환하는 데 이 소프트 키를 사용합니다. 선택한 표시 유형에 따라 절대번지 또는 명칭 주소와 함께 변수가 표시됩니다. 변수에 대한 명칭이 없으면 자동으로 절대번지 표시로 나타납니다.
애플리케이션 영역의 표시를 한 단계씩 확대 또는 축소할 수 있습니다. 다음의 확대 단계가 지원됩니다. 20%(기본값), 60%, 100% 및 300%
명칭 또는 절대번지 표시 상태의 변수를 검색하는 데 사용할 수 있습니다.
다양한 검색 기준을 선택할 수 있는 대화 상자가 표시됩니다. “절대 주소/심볼 주소” 소프트 키를 사용하여 2개의 PLC 창에서 이 기준에 일치되는 일정한 변수를 검색할 수 있습니다. 검색
할 때 대소문자는 구분되지 않습니다.
위쪽 전환 필드에서 선택:
• 절대번지 및 명칭주소 검색
• 네트워크 번호로 이동
• SBR 명령 찾기
추가 검색 기준:
• 아래 방향으로 검색(현재 커서 위치에서 시작)
• 전체 프로그램 블록(맨 처음에서 시작)
• 하나의 프로그램 블록에서
• 프로그램 블록 전체
변수와 상수를 완전한 단어(이름)로 검색할 수 있습니다.
디스플레이 설정에 따라 기호 또는 절대번지를 검색할 수 있습니다.
Symbolic address
Zoom +
Zoom -
Find

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-143 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
OK 소프트 키를 누르면 검색이 시작됩니다. 검색된 요소에 초점이 표시되면서 강조됩니다. 일치되는 것이 없으면 해당하는 에러 메시지가 정보 표시줄에 나타납니다.
대화 상자를 닫으려면 취소 소프트 키를 사용합니다. 그러면 검색이 수행되지 않습니다.
그림 7-42 명칭 변수 검색 절대 주소 변수 검색
검색 대상이 발견된 후 계속 탐색 소프트 키를 사용하여 검색을 계속할 수 있습니다.
이 소프트 키를 선택하면 선택된 네트워크에 사용된 모든 기호 식별자가 표시됩니다.
그림 7-43 네트워크 명칭
크로스 래퍼런스 목록을 표시하는 데 이 소프트 키를 사용합니다. PLC 프로젝트에 사용되는
모든 변수가 표시됩니다.
변수 목록은 입력, 출력, 플래그 등이 사용되는 네트워크를 나타냅니다.
Symbol info
Cross refs.

시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-144 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 7-44 "Cross references(크로스 레퍼런스)” 기본 메뉴(절대 주소)(명칭)
화면 1/2에서 열기 기능을 사용하여 반쪽 분할창에 직접 해당 프로그램 세그먼트를 열 수 있습
니다.
사용 중인 표시 유형에 따라 절대번지 또는 명칭주소와 함께 요소가 표시됩니다.
식별자에 대한 명칭이 없으면 자동으로 절대 번지 표시로 설명됩니다.
식별자의 표시 유형은 상태 표시줄에 표시됩니다. 식별자 표시에 대한 기본 설정은 절대 번지 표시입니다.
크로스 레퍼런스 목록에서 선택한 변수가 해당 창에 열립니다.
예제:
프로그램 블록 OB1의 네트워크 1에서 절대 변수 M251.0의 상호 논리 연관성을 보려고 합니다.
크로스 레퍼런스 표에서 변수를 선택한 후 화면 1에서 열기 소프트 키를 선택하면, 해당하는 프로그램 단편이 창 1에 표시됩니다.
그림 7-45 OB1 네트워크 2의 커서 "M251.0" 창1의 OB1 network 2에 있는 M251.0
... 는 크로스 레퍼런스 목록에서 변수를 검색하는 데 사용됩니다.
변수를 완전한 단어(식별자)로 검색할 수 있습니다. 검색할 때 대소문자는 구분되지 않습니다.
Symbolic address
Open in window 1
Find
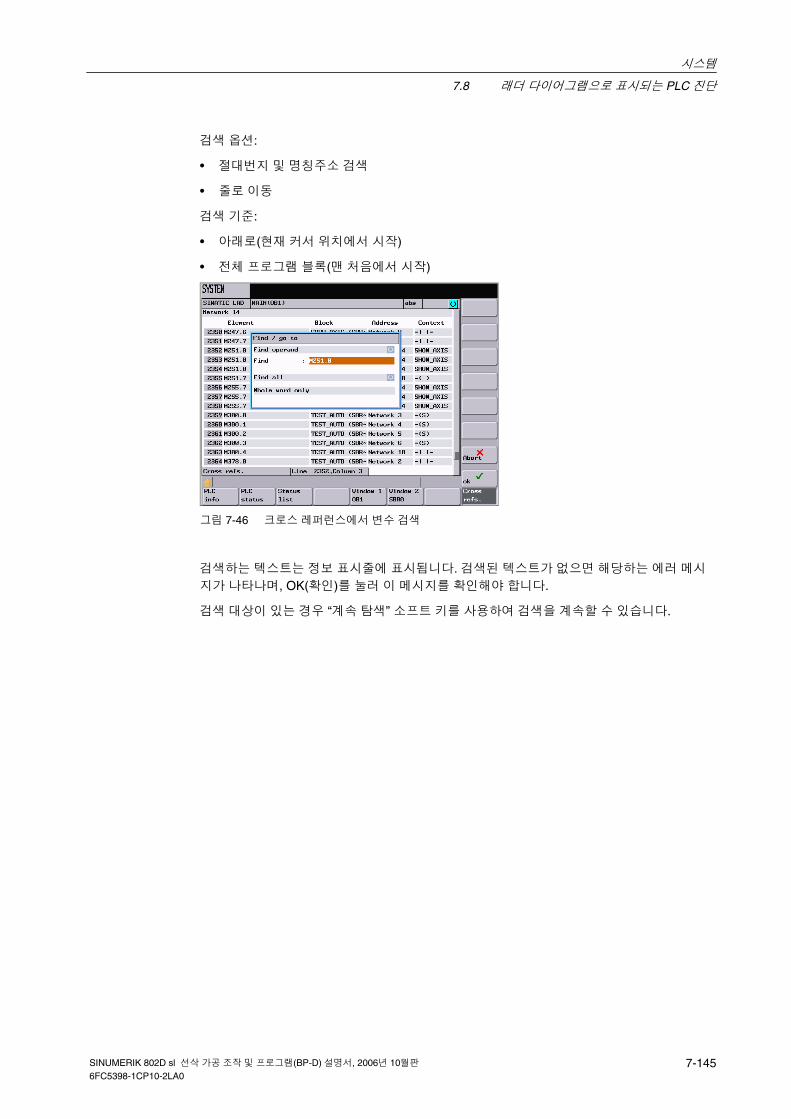
시스템
7.8 래더 다이어그램으로 표시되는 PLC 진단
7-145 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
검색 옵션:
• 절대번지 및 명칭주소 검색
• 줄로 이동
검색 기준:
• 아래로(현재 커서 위치에서 시작)
• 전체 프로그램 블록(맨 처음에서 시작)
그림 7-46 크로스 레퍼런스에서 변수 검색
검색하는 텍스트는 정보 표시줄에 표시됩니다. 검색된 텍스트가 없으면 해당하는 에러 메시
지가 나타나며, OK(확인)를 눌러 이 메시지를 확인해야 합니다.
검색 대상이 있는 경우 “계속 탐색” 소프트 키를 사용하여 검색을 계속할 수 있습니다.

시스템
7.9 알람 표시
7-146 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
7.9 알람 표시
작업 순서
알람 창을 엽니다. 소프트 키를 사용하여 NC 정보를 정렬할 수 있습니다. PLC 알람은 정렬되
지 않습니다.
그림 7-47 알람 창
소프트 키
모든 알람을 우선순위에 따라 정렬할 때 이 소프트 키를 사용합니다. 우선순위가 가장 높은 알람이 목록 맨 위에 표시됩니다.
발생 시간에 따라 알람을 정렬할 때 이 소프트 키를 사용합니다. 가장 최근에 발생된 알람이 목록 맨 위에 표시됩니다.
발생 시간에 따라 알람을 정렬할 때 이 소프트 키를 사용합니다. 가장 오래 전 알람이 목록 맨 위에 표시됩니다.
Highest priority
Most rec. alarm
Oldest alarm

8-147 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그래밍
8.1 NC 프로그램 작성의 기본 원칙
8.1.1 프로그램 이름
각 프로그램에 고유한 프로그램 이름이 있습니다. 프로그램을 작성하는 경우 다음 규칙에 따
라 프로그램 이름을 마음대로 선택할 수 있습니다.
• 처음 2자는 글자여야 합니다.
• 글자, 숫자 또는 밑줄만 사용하십시오.
• 구분 기호를 사용하지 마십시오(“문자 세트”절 참조).
• 구두점은 파일 확장자를 구분하는 용도로만 사용할 수 있습니다.
• 최대 16자까지만 사용할 수 있습니다.
예: SHAFT527
8.1.2 프로그램 구조
구조 및 내용
NC 프로그램은 블록 시퀀스로 구성됩니다(표 8–1 참조).
각 데이터 블록은 하나의 가공 단계를 나타냅니다.
명령은 블록 안에 워드 형태로 작성됩니다.
실행 순서에서 마지막 블록에는 프로그램의 끝을 나타내는 특수한 단어인: M2. 표 8-1 NC 프로그램 구조
블록명 워드 워드 워드 ... ; 코멘트
블록명 N10 G0 X20 ... ; 첫번째 블록
블록명 N20 G2 Z37 ... ; 두 번째 블록
블록명 N30 G91 ... ... ; ...
블록명 N40 ... ... ...
블록명 N50 M2 ; 프로그램 종료
8

프로그래밍
8.1 NC 프로그램 작성의 기본 원칙
8-148 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.1.3 워드 구조 및 주소
기능/구조
워드는 블록 요소이며 제어 명령을 주로 구성합니다. 워드는 다음 요소로 구성됩니다.
• 주소 문자: 일반적으로 글자
• 숫자 값: 특정 주소를 사용하며 주소 앞에 부호와 소수점을 추가할 수 있는 일련의 숫자
양수 부호(+)는 생략할 수 있습니다.
그림 8-1 워드 구조(예)
몇 개의 주소 문자
워드에는 몇 개의 주소 글자가 포함될 수도 있습니다. 그러나, 이 경우 숫자값은 중간 문자 “=” 를 통해 할당해야 합니다. 예제: CR=5.23
또한 기호 이름을 사용하여 G 기능을 호출할 수도 있습니다(“명령 목록” 절 참조). 예제: SCALE ; 배율 팩터 사용
확장된 주소
주소 사용 R 파라메타 H H 기능 I, J, K 보간 파라메타/중간점 M 특수 기능 M, 스핀들에만 적용 S 스핀들 속도(스핀들 1 또는 2) 주소를 1 ~ 4자리로 확장하면 더 많은 주소를 표현할 수 있습니다. 이 경우에 등호 “=”를 사용하여 값을 할당해야 합니다(“명령 목록” 절 참조). 예: R10=6.234 H5=12.1 I1=32.67 M2=5 S2=400

프로그래밍
8.1 NC 프로그램 작성의 기본 원칙
8-149 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.1.4 블록 구조
기능
블록에는 해당 단계를 실행하는 데 필요한 모든 데이터가 포함되어야 합니다.
일반적으로 하나의 블록은 몇 개의 워드로 구성되며 항상 블록 종료 문자 “LF”(줄 바꿈)로 끝납
니다. 이 문자는 작성 시 줄 바꿈 또는 <INPUT> 키를 누를 때 자동으로 생성됩니다.
그림 8-2 블록 구조도
워드 순서
블록에 몇 개의 명령이 포함된 경우 다음 순서대로 사용하는 것이 좋습니다. N... G... X... Z... F... S... T... D... M... H...
블록 번호에 관한 설명
먼저 5 또는 10단계의 블록 번호를 선택합니다. 그러면 나중에 블록을 삽입할 수 있고 블록 번호를 오름차순으로 살펴볼 수도 있습니다.
블록 스킵
각 프로그램에서 실행되지 않을 일부 블록은 앞에 슬래시(/)를 붙여 표시할 수 있습니다. 블록 스킵 기능은 작업 (프로그램 제어: “SKP”) 또는 PLC(신호)를 통해 활성화됩니다. 또한 “/”를 사용하여 몇 개 블록을 스킵함으로써 전체 프로그램 구간을 스킵할 수도 있습니다. 프로그램 실행 중에 블록 스킵을 활성화하면 “/”로 표시된 모든 블록이 생략됩니다. 관련 블록
에 포함된 모든 명령은 고려되지 않습니다. 프로그램에서는 표시하지 않고 다음 블록을 계속 진행합니다.

프로그래밍
8.1 NC 프로그램 작성의 기본 원칙
8-150 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
코멘트, 설명
코멘트(설명)를 사용하여 프로그램 블록 내 명령을 설명할 수 있습니다. 코멘트는 “;” 문자로 시작되고 블록 끝 문자로 끝납니다. 코멘트는 현재 블록 표시에 나머지 블록 내용과 함께 표시됩니다.
메시지
메시지는 개별 블록으로 프로그램됩니다. 메시지는 특수 필드에 표시되며 새 메시지가 있는 블록이 실행되거나 프로그램 끝에 도달할 때까지 활성 상태로 유지됩니다. 텍스트 메시지는 최대 65자를 표시할 수 있습니다. 메시지 텍스트가 없는 메시지는 이전 메시지를 삭제합니다. MSG (“메시지 텍스트입니다.”)
프로그램 예제
N10 ; G&S 회사, 주문 번호. 12A71 N20 ; 펌프 부품 17, 도면 번호: 123 677 N30 ; H. Adam, TV 4 부서에서 프로그램 N40 MSG(“공백, 황삭”) :50 G54 F4.7 S220 D2 M3 ; 메인 블록 N60 G0 G90 X100 Z200 N70 G1 Z185.6 N80 X112 /N90 X118 Z180 ; 블록을 건너뛸 수 있습니다. N100 X118 Z120 N110 G0 G90 X200 N120 M2 ; 프로그램 종료
8.1.5 문자 세트
프로그램에는 다음 문자가 사용됩니다. 각 문자는 관련 정의에 따라 해석됩니다.
문자, 숫자
A, B, C, D, E, F, G, H, I, J, K, L, M, N,(O),P, Q, R, S, T, U, V, W, X, Y, Z 0, 1, 2, 3, 4, 5, 6, 7, 8, 9 대/소문자를 구분하지 않습니다.
출력 가능한 특수 문자
( 열기 소괄호 “ 큰따옴표 ) 닫기 소괄호 _ 밑줄(글자에 속함) [ 열기 대괄호 . 소수점

프로그래밍
8.1 NC 프로그램 작성의 기본 원칙
8-151 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
] 닫기 대괄호 , 쉼표, 구분 기호 < 보다 작음 ; 코멘트 시작 > 보다 큼 % 예약됨, 사용할 수 없습니다. : 기본 블록, 레이블의 끝 & 예약됨, 사용할 수 없습니다. = 할당; 등호 세트 ’ 예약됨, 사용할 수 없습니다. / /나눗셈; 블록 스킵 $ 시스템 내부 변수 식별자 * 곱셈 ? 예약됨; 사용할 수 없습니다. + 덧셈; 더하기 기호! ! 예약됨; 사용할 수 없습니다. - 뺄셈; 빼기 기호
출력 불가능한 특수 문자
LF 줄바꿈(블록 끝 문자)
공백 단어 사이 구분 문자; 공백
Tab 키 예약되어 있으므로 사용할 수 없습니다.

프로
그래
밍
8-152
SIN
UM
ER
IK 802D
sl 선삭
가공
조작
및 프
로그
램(B
P-D
) 설명
서, 2006
년 10
월판
6FC
5398-1CP
10-2LA0
프로그래밍
D...
F...
G4 F... ;개별 블록
G34, G35 참조
G... 또는 기호 이름. 예: CIP
G0 X... Z...
G1 X...Z... F...
G2 X... Z... I... K... F... ; 중점 및 끝점 G2 X... Z... CR=... F... ; 반경 및 끝점 G2 AR=... I... K... F... ; 틈 각도와 중점 G2 AR... X... Z... F... ; 틈 각도와 끝점
G3 .... ; 그렇지 않으면, G2 사용
CIP X... Z... I1=... K1=... F... ;I1, K1이 중간점입니다.
N10 ... N20 CT Z... X... F... ; 원, 접선 전이 이전 경로 세그먼트로
; 연속 리드 G33 Z... K... SF=... ; 원통 나사 G33 X... I... SF=... ; 횡형 나사 G33 Z... X... K... SF=... ; 태이퍼 나사, Z축 경로가 X축 경로 보다 더 큼 G33 Z... X... I... SF=... ; 태이퍼 나사, X축 경로가 Z축 경로보다 더 큼
정보
특정 공구 T에 대한 보정 데이터를 포함합니다... ; D0->보정값= 0, 하나에 공구에 대해 최대 9개 D 번호
공구/공작물 경로 속도, 단위 mm/min 또는 mm/rev. G94 또는 G95에 해당
드웰 시간(초)
mm/rev.
G 기능은 G 그룹으로 나눠집니다. 하나의 블록에서 그룹에 있는 하나의 G 기능만 프로그래밍할 수 있습니다. G 기능은 모달(동일한 그룹 내의 다른 코드에 의해 취소될 때까지 유지) 이거나 프로그램된 블록에 대해서만 적용될 수 있습니다 (비-모달).
G 그룹:
1: 이동 명령
(보간 유형)
모달식 효과
값 할당
0 ... 9, 정수만, 부호 없음
0.001 ... 99 999.999
0.001 ... 99 999.999
0.001 ... 99 999.999
정수만, 지정된 값
의미
공구 보정 번호
피드
드웰 시간(G4가 포함된 블록)나사 리드 변경(블록에 G34, G35 포함)
G 기능 (예비 기능)
급이송을 이용한 선형 보간
피드 G1을 이용한 선형 보간
CW 원호 보간
CCW 원호 보간
중간점을 통한 원형 보간
원형 보간; 접선 전이
연속 리드를 사용하여 나사 절삭
8.1.6 명령 목록
SINUMERIK 802D sl plus 및 pro에서 사용할 수 있는 기능
주소
D
F
F
F
G
G0
G1 *
G2
G3
CIP
CT
G33

프로
그래
밍
8-153 S
INU
ME
RIK
802D sl 선
삭 가
공 조
작 및
프로
그램
(BP
-D) 설
명서
, 2006년
10월
판
6FC
5398-1CP
10-2LA0
G33 Z... K... SF=... ; 원통 나사, 연속 리드 G34 Z... K... F17.123 ; 리드 증가 ; 17.123 mm/rev.
2
G33 Z... K... SF=... ; ; 원통 나사 G35 Z... K... F7.321 ; 리드 증가 ; 7.321 mm/rev.
2
N10 SPOS=... ; 위치 제어 상태의 스핀들 N20 G331 Z... K... S... ;리지드 태핑(보정 척 사용 안 함), 예: Z축에서s ; RH 또는 LH 나사는 리드 부호로 지정됨(예: K+): + : M3에 대해 동일 - : M4에 대해 동일
G332 Z... K... ;리지드 태핑(보정 척 사용 안 함), 예, Z 축에서, 후진 이동 ; G331과 동일한 리드 부호 G4 F... ; 개별 블록, F: 시간(초) 또는 G4 S.... ; 개별 블록, S: 스핀들 회전에서
G74 X1=0 Z1=0 ; 개별 블록, (기계 축 식별자!)
G75 X1=0 Z1=0 ;개별 블록 (기계 축 식별자!)
TRANS X... Z... ;개별 블록
SCALE X... Z... ; 지정한 축 방향으로의 배율 팩터, 개별 블록
ROT RPL=... ; 현재 평면에서 회전 G17 - G19, 개별 블록
MIRROR X0 ; 서로 방향이 바뀌는 좌표 축 개별 블록
ATRANS X... Z... ;개별 블록
ASCALE X... Z... ; 지정한 축 방향으로의 배율 팩터, 개별 블록
AROT RPL=... ; 현재 평면 G17 - G19에서 추가, 회전 개별 블록
2: 특수 이동, 드웰 시간 비모달
3: 메모리에 쓰기 비모달
나사 절삭, 리드 증가
나사 절삭, 피치 감소
나사 보간
나사 보간 - 후진
드웰 시간
원점 복귀
고정 정지점 접근
프로그램 가능한 옵셋
프로그램 가능한 배율 팩터
프로그램 가능한 회전
프로그램 가능한 미러링
추가 프로그램 가능한 옵셋
추가 프로그램 가능한 배율 팩터
추가 프로그램 가능한 회전
G34
G35
G331
G332
G4
G74
G75
TRANS
SCALE
ROT
MIRROR
ATRANS
ASCALE
AROT

프로
그래
밍
8-154
SIN
UM
ER
IK 802D
sl 선삭
가공
조작
및 프
로그
램(B
P-D
) 설명
서, 2006
년 10
월판
6FC
5398-1CP
10-2LA0
AMIRRO R X0 ; 서로 방향이 바뀌는 좌표 축 개별 블록
G25 S... ;개별 블록 G25 X... Z... ;개별 블록
G26 S... ;개별 블록 G26 X... Z... ;개별 블록
6: 평면 선택
7: 공구 반경 보정 모달식 효과
8: 설정 가능한 워크 옵셋 모달식 효과
9: 설정 가능한 워크 옵셋 삭제 비모달
10: 접근 동작 모달식 효과
11: 정위치 정지, 비모달 비모달
12: 정위치 정지 창 모달식 효과
추가 프로그램 가능한 미러링
스핀들 속도 하한 또는 작업 영역 하한
스핀들 속도 상한 또는 작업 영역 상한
X/Y 평면(중심 드릴링 시, TRANSMIT 밀링 필요)
Z/X 평면(표준 선삭 가공)
Y/Z 평면(TRACYL 밀링에 필요함)
공구 반경 보정 OFF
형상 좌측 공구 반경 보정
형상 우측 공구 반경 보정
설정 가능한 워크 옵셋 OFF
1번째 셋터블 워크 옵셋
2번째 설정 가능한 워크 옵셋
3번째 설정 가능한 워크 옵셋
4번째 설정 가능한 워크 옵셋
5번째 설정 가능한 워크 옵셋
6번째 설정 가능한 워크 옵셋
설정 가능한 워크 옵셋 삭제, 비모달
기본 프레임을 포함하여 설정 가능한 옵셋 삭제, 비모달
정위치 정지
연속 경로 모드
비모달 정위치 정지
정위치 정지 창, 미세, G60, G9 사용
정위치 정지 창, 일반, G60, G9 사용
AMIRROR
G25
G26
G17
G18 *
G19
G40 *
G41
G42
G500 *
G54
G55
G56
G57
G58
G59
G53
G153
G60 *
G64
G9
G601 *
G602

프로
그래
밍
8-155 S
INU
ME
RIK
802D sl 선
삭 가
공 조
작 및
프로
그램
(BP
-D) 설
명서
, 2006년
10월
판
6FC
5398-1CP
10-2LA0
G96 S... LIMS=... F...
; 셋팅 데이터를 사용하여 활성화된 모든 축에 적용됨, 값이 G25, G26에 알맞게 설정됨
13: 인치/미터 치수 표기 모달식 효과
14: 절대/증분 치수 기업 모달식 효과
15: 이송 속도/스핀들 모달식 효과
18: 공구 반경 보정 기능을 사용한 모서리에서의 동작 모달식 효과
21: 가속 특성 모달식 효과
24: 피드포워드 제어 모달식 효과
28: 작업 영역 제한 모달식 효과
29: 치수 표기 반경/직경 모달식 효과
47: 외부 NC 언어 모달식 효과
인치 치수 표기
미터 치수 표기
미터 치수 표기; F(Feed)
미터 치수 표기, 피드 F
절대 치수 기입
증분 치수 기입
피드 F(mm/min)
피드 F(mm/스핀들 회전)
일정한 절삭 속도 ON(F: mm/rev, S: m/min)
일정한 절삭 속도 OFF
전이 원
교차점
갑작스런 경로 가속
저크 제한 경로 가속화
피드포워드 제어 OFF
피드포워드 제어 ON
작업 영역 제한 ON
작업 영역 제한 OFF
반경 치수 기입
직경 치수 기입
SIEMENS 모드
외부 모드(802Dbl 사용 안 함)
G70
G71 *
G700
G710
G90 *
G91
G94
G95 *
G96
G97
G450 *
G451
BRISK *
SOFT
FFWOF *
FFWON
WALIMON*
WALIMOF
DIAMOF
DIAMON *
G290 *
G291
별표(*)가 표시된 기능은 프로그램을 시작할 때(별도로 프로그램되지 않은 경우와 기계 제조업체에서 선반 기술용으로 기본 설정을 미리 저장한 경우 제어 시스템의 기본 조건에서) 작동합니다.

프로
그래
밍
8-156
SIN
UM
ER
IK 802D
sl 선삭
가공
조작
및 프
로그
램(B
P-D
) 설명
서, 2006
년 10
월판
6FC
5398-1CP
10-2LA0
프로그래밍
H0=... H9999=... e.g.: H7=23.456
G2, G3 및 G33, G34, G35 참조
G2, G3 및 G33, G34, G35 참조
CIP 참조
CIP 참조
L.... ;개별 블록
M...
M2=3 ; 스핀들 2의 CW 회전 중지
M2=4 ; 스핀들 2의 CCW 회전 중지
M2=5 ; 스핀들 2의 스핀들 중지
정보
값이 PLC로 전송됩니다. 의미는 기계 제조업체에서 정의합니다.
X축에 속하며, G2,G3에 영향을 받습니다. -> 원호 구간 또는 G33, G34, G35 G331, G332 -> 나사 리드
Z축에 속합니다. 그렇지 않은 경우, I에서와 같습니다.
X축에 속함. CIP를 사용한 원형 보간용으로 지정
Z축에 속합니다. CIP를 사용한 원형 보간 지정
사용자 정이 이름 대신에 L1 ...L9999999를 선택할 수 있습니다. 이렇게 하면 서브루틴을 개별 블록에서 호출할 수 있습니다. 참고: L0001이 항상 L1과 같지는 않습니다. 이름 "LL6"은 공구 변경 서브루틴용으로 예약되어 있습니다.
예를 들어, “Coolant ON”와 같이, 전환 작업을 시작하려는 경우, 블록당 최대 5개 M 기능M0을 포함하는 블록의 끝에서 가공이 중지됩니다. 계속하려면 <NC 시작>을 누르십시오.
M0에서와 같지만, 특수 신호(프로그램 제어: “M01")가 있는 경우에만 중지됩니다.
처리 순서의 마지막 블록에 있습니다.
예약되어 있으므로 사용할 수 없습니다.
예약되어 있으므로 사용할 수 없습니다.
n = 1 또는 = 2
n = 1 또는 = 2
n = 1 또는 = 2
값 할당
± 0.0000001 ... 9999 9999 (8자리) 또는 지수 지정 사용: ± (10-300 ... 10+300 )
±0.001 ... 99 999.999 나사: 0.001 ... 2000.000
±0.001 ... 99 999.999 나사: 0.001 ... 2000.000
±0.001 ... 99 999.999
±0.001 ... 99 999.999
7자리, 정수만, 부호 없음
0 ... 99 정수만, 부호 없음
의미
H 기능
보간 파라메타
보간 파라메타
원형 보간의 중간점
원형 보간의 중간점
서브루틴, 이름과 호출
기타 기능
프로그램 중지
프로그램 중지
프로그램 종료
-
-
스핀들의 CW 회전(마스터 스핀들의 경우)
스핀들의 CCW 회전(마스터 스핀들의 경우)
스핀들 중지(마스터 스핀들의 경우)
스핀들의 CW 회전(스핀들 n의 경우)
스핀들의 CCW 회전(스핀들 n의 경우)
스핀들 중지(스핀들 n의 경우)
주소
H H0= ~ H9999=
I
K
I1
K1
L
M
M0
M1
M2
M30
M17
M3
M4
M5
Mn=3
Mn=4
Mn=5

프로
그래
밍
8-157 S
INU
ME
RIK
802D sl 선
삭 가
공 조
작 및
프로
그램
(BP
-D) 설
명서
, 2006년
10월
판
6FC
5398-1CP
10-2LA0
프로그래밍
M1=40 ; 자동 기어단 ; 스핀들 1의 경우
M2=41 ; 스핀들 2의 기어단 1
N20
:20
L781 P... ; 개별 블록
과R1=7.9431 R2=4 여기서: R1=-1.9876EX9 ; R1=-1 987 600 000
R1=SIN(17.35)
R2=COS(R3)
R4=TAN(R5)
R10=ASIN(0.35) ; R10: 20.487도
R20=ACOS(R2) ; R20: ... 도
정보
기계 조작반을 통해 M6에서 활성화된 경우에만. 그렇지 않으면 T 명령을 사용하여 직접 변경하십시오.
n = 1 또는 = 2
n = 1 또는 = 2
예약되어 있으므로 사용할 수 없습니다.
제어 시스템을 통해 기능이 정의되어 있지 않으므로 기계 제조업체에서 원하는 대로 사용할 수 있습니다.
번호로 블록을 식별하는 데 사용할 수 있습니다. 블록 시작 시 나타납니다.
특수 블록 식별자, N 대신에 사용됩니다... ; 이 블록에는 완전한 후속 가공 단계에 대한 모든 명령이 포함되어야 합니다.
서브루틴을 몇 번 실행해야 하며 서브루틴이 기능와 동일한 블록에 포함되는 경우에 사용합니다.
연산자 + - * /를 사용하는 4가지 기본 산술 함수 외에도, 다음과 같은 산수 함수가 있습니다.
값 할당
0 ... 9999 9999 정수만, 부호 없음
0 ... 9999 9999 정수만, 부호 없음
1 ... 9999 정수만, 부호 없음
± 0.0000001 ... 9999 9999 (8자리) 또는 지수 지정 사용: ± (10-300 ... 10+300 )
도
도
도
의미
공구 교환
자동 기어단 전환(마스터 스핀들의 경우)
자동 기어단 전환(스핀들 n의 경우)
기어단 1 - 기어단 5(마스터 스핀들의 경우)
기어단 1 - 기어단 5(스핀들 n의 경우)
-
나머지 M 기능
블록 번호 - 하위 블록
블록 번호 - 메인 블록
서브루틴 실행 횟수
파라메타
사인
코사인
탄젠트
아크사인
아크코사인
주소
M6
M40
Mn=40
M41 ~ M45
Mn=41 ~ Mn=45
M70, M19
M...
N
:
P
R0 to R299
산술 함수
SIN( )
COS( )
TAN( )
ASIN( )
ACOS( )

프로
그래
밍
8-158
SIN
UM
ER
IK 802D
sl 선삭
가공
조작
및 프
로그
램(B
P-D
) 설명
서, 2006
년 10
월판
6FC
5398-1CP
10-2LA0
프로그래밍
R40=ATAN2(30.5,80.1); R40: 20.8455도
R6=SQRT(R7)
R12=POT(R13)
R8=ABS(R9)
R10=TRUNC(R2)
R12=LN(R9)
R13=EXP(R1)
RET ;개별 블록
S...
S1=725 ; 스핀들 725 rev/min(스핀들 1)
S2=730 ; 스핀들 730 rev/min(스핀들 2)
G96 S...
G4 S... ;개별 블록
T...
X...
Y...
Z...
N10 G91 X10 Z=AC(20) ;X - 증분 치수, Z - 절대 치수
N10 ACC[X]=80 ; X축에 대해 80% N20 ACC[S]=50 ; 스핀들에 대해 50%
N10 A=ACP(45.3) ; 양의 방향으로 A축 절대 위치에 접근 N20 SPOS=ACP(33.1) ;스핀들 위치 지정
정보
합계 벡터의 각도는 서로 수직을 이루는 2개 벡터에서 계산됩니다. 지정된 2번째 벡터는 항상 각도 참조로 사용됩니다. 결과 범위: -180도 ~ +180도
M2 대신에 연속 경로 모드를 유지하는 데 사용됩니다.
스핀들 속도(rev/min)
스핀들 속도(rev/min)
스핀들 속도(rev/min)
G96 기능을 사용하는 절삭률(m/min;마스터 스핀들에만 해당)
스핀들 회전수 단위 드웰 시간
공구 변경은 T 명령을 사용하여 직접 수행하거나 M6을 통해서만 수행할 수 있습니다. 어떠한 방법으로 공구를 변경할지는 머신 데이터에서 설정할 수 있습니다.
위치 데이터
위치 데이터, 예: TRACYL, TRANSMIT 사용
위치 데이터
치수는 G91과 상관 없이 특정 축의 중심점이나 끝점에 대해 지정할 수 있습니다.
축 또는 스핀들에 대한 가속 오버라이드, 백분율로 지정됩니다.
G90/G91과 상관 없이 ACP(...)를 사용하여 회전 축의 끝점에 대해 치수를 지정할 수도 있으며, 이 점은 스핀들 배치에도 적용됩니다.
값 할당
0.001 ... 99 999.999
0.001 ... 99 999.999
0.001 ... 99 999.999
0.001 ... 99 999.999
0.001 ... 99 999.999
1 ... 32 000 정수만, 부호 없음
±0.001 ... 99 999.999
±0.001 ... 99 999.999
±0.001 ... 99 999.999
-
1 ... 200, 정수
-
의미
아크 탄젠트2
제곱근
제곱
절대값
정수로 잘림
자연 로그
지수 함수
서브루틴 끝
스핀들 속도(마스터 스핀들)
스핀들 속도(스핀들 1의 경우)
스핀들 속도(스핀들 2의 경우)
G96이 활성화된 경우 절삭률
드웰 시간 드웰 시간(G4가 포함된
공구 번호
축
축
축
절대 좌표
가속 오버라이드율:
절대 좌표, 양의 방향으로 위치에 접근 (로타리 축, 스핀들의 경우)
주소
ATAN2( , )
SQRT( )
POT( )
ABS( )
TRUNC( )
LN( )
EXP( )
RET
S...
S1=...
S2=...
S
S
T
X
Y
Z
AC
ACC[axis]
ACP

프로
그래
밍
8-159 S
INU
ME
RIK
802D sl 선
삭 가
공 조
작 및
프로
그램
(BP
-D) 설
명서
, 2006년
10월
판
6FC
5398-1CP
10-2LA0
프로그래밍
N10 A=ACN(45.3) ;음의 방향으로 A축 절대 위치에 접근 N20 SPOS=ACP(33.1) ;스핀들 위치 지정
N10 G1 X... Z.... N11 X... ANG=... 또는 여러 블록에 걸친 형상: N10 G1 X... Z... N11 ANG=... N12 X... Z... ANG=...
G2, G3 참조
N10 CALL VARNAME ; 변수 이름
N10 X... Z.... CHF=... N11 X... Z...
N10 X... Z.... CHF=... N11 X... Z...
G2, G3 참조
N5 RTP=110 RFP=100 .... ;값 할당 N10 CYCLE82(RTP, RFP, ...) ;개별 블록
N10 CYCLE83(110, 100, ...) ;또는 값을 직접 전달, 개별 블록
N10 CYCLE84(...) ;개별 블록
N10 CYCLE840(...) ;개별 블록
N10 CYCLE85(...) ;개별 블록
N10 CYCLE86(...) ;개별 블록
N10 CYCLE88(...) ;개별 블록
N10 CYCLE93(...) ;개별 블록
정보
G90/G91과 상관 없이 ACN(...)을 사용하여 회전 축의 끝점에 대해 치수를 지정할 수도 있으며, 이 점은 스핀들 배치에도 적용됩니다.
도 단위로 지정되며, G0 또는 G1에 대해 직선을 지정할 수 있는 옵션입니다. 평면에서 하나의 끝점 좌표만 알려져 있습니다. 또는 여러 블록에 걸친 형상의 경우 전체 끝점을 알 수 없습니다.
각도로 지정되었습니다. G2/G3을 사용할 때 원을 정의할 수 있습니다.
싸이클 호출의 특수한 형태. 파라메타가 전달되지 않으며 싸이클 이름이 변수에 저장됩니다. 싸이클 내부용으로만 사용됩니다.
두 형상 블록 사이에 지정한 모따기 길이의 모따기를 삽입합니다.
두 형상 블록 사이에 지정한 측면 길이의 모따기를 삽입합니다.
G2/G3을 사용할 때 원을 정의할 수 있습니다.
가공 싸이클 호출 시 개별 블록이 필요합니다. 제공된 전달 파라메타에 값을 할당해야 하며, MCALL 또는 CALL을 사용하여 특수 싸이클 호출을 사용할 수도 있습니다.
값 할당
-
±0.00001 ... 359.99999
0.00001 ... 359.99999
-
0.001 ... 99 999.999
0.001 ... 99 999.999
0.010 ... 99 999.999 음수 부호 – 원 선택 시: 반원보다 큼
지정된 값만
의미
절대 좌표, 음의 방향으로 위치에 접근 (로타리 축, 스핀들의 경우) 형상 정의를 위한 직선 지정 각도
원형 보간 틈 각도
간접 싸이클 호출
모따기, 일반 적용
모따기, 형상 정의에서
원형 보간 반경
가공 싸이클
드릴링, 카운터보링
심공 드릴링
리지드 태핑
보정 척을 사용한 태핑
리밍(Reaming)
보링
정지점을 사용한 보링
Recess
주소
ACN
ANG
AR
CALL
CHF
CHR
CR
CYCLE...
CYCLE82
CYCLE83
CYCLE84
CYCLE840
CYCLE85
CYCLE86
CYCLE88
CYCLE93

프로
그래
밍
8-160
SIN
UM
ER
IK 802D
sl 선삭
가공
조작
및 프
로그
램(B
P-D
) 설명
서, 2006
년 10
월판
6FC
5398-1CP
10-2LA0
프로그래밍
N10 CYCLE94(...) ;개별 블록
N10 CYCLE95(...) ;개별 블록
N10 CYCLE97(...) ;개별 블록
N10 A=DC(45.3) ;A축 위치에 직접 접근 N20 SPOS=DC(33.1) ;스핀들 위치 지정
DEF INT VARI1=24, VARI2 ; INT 형식의 변수 2개 ; 사용자가 정의한 이름
N10 G33 Z50 K5 DITS=4
N10 G33 Z50 K5 DITE=4
단위에 대한 설명은 F 및 G94, G95 참조 모따기/라운딩에 대한 설명은 CHF, CHR, RND 참조
단위에 대한 설명은 F 및 G94, G95 참조 모따기/라운딩에 대한 설명은 RND, RNDM 참조
N20 G1 X10 Z25 FXS[Z1]=1 FXST[Z1]=12.3 FXSW[Z1]=2 F...
N30 FXST[Z1]=12.3
N40 FXSW[Z1]=2.4
N10 LABEL1: ... ... N100 GOTOB LABEL1
N10 GOTOF LABEL2 ... N130 LABEL2: ...
정보
G90/G91과 상관 없이 DC(...)를 사용하여 회전 축의 끝점에 대해 치수를 지정할 수도 있으며, 이 점은 스핀들 배치에도 적용됩니다.
BOOL, CHAR, INT, REAL 형식의 로컬 사용자 변수를 프로그램 시작 시 직접 정의
구성된 축 가속으로 시작합니다. 갑작스러운 가속으로 시작합니다. 런인 경로 지정, 축 오버로드 사용 가능
구성된 축 가속으로 중지합니다. 갑작스런 가속으로 중지합니다, 런아웃 경로 지정, 재표면화 사용
FRC=0인 경우: 피드 F 작동
FRCM=0인 경우: 피드 F 작동
축: 기계 식별자 사용
% 단위, 드라이브 최대 토크에서 최대 100%, 축: 기계 식별자 사용
축 단위(mm 또는 deg), 축: 기계 식별자 사용
GoTo 작업은 레이블로 표시된 블록에 대해 수행됩니다. 점프 대상이 프로그램 시작 방향에 있습니다.
GoTo 작업은 레이블로 표시된 블록에 대해 수행됩니다. 점프 대상이 프로그램 끝 방향에 있습니다.
값 할당
-
-1 ... < 0, 0, > 0
-1 ... < 0, 0, > 0
0, >0
0, >0
=1: 선택 =0: 모달
> 0.0 ... 100.0
> 0.0
-
-
의미
언더컷 DIN76 (형태 E와 F), 마무리
릴리프 절삭을 사용하여 대목 제거
나사 가공
절대 좌표, 위치에 직접 접근 (로타리 축, 스핀들의 경우)
정의 명령
런인 경로 나사 G33 사용
런아웃 경로 나사 G33 사용
모따기/라운딩에 사용되는 비모달식 피드
모따기/라운딩의 모달 피드
고정 정지점로 이동
고정 정지점으로 이동에 대한 클램핑 토크
모니터링 창, 고정 정지점으로 이동
뒤로 복귀 명령
GoTo 명령
주소
CYCLE94
CYCLE95
CYCLE97
DC
DEF
DITS
DITE
FRC
FRCM
FXS [축]
FXST [축]
FXSW [축]
GOTOB
GOTOF

프로
그래
밍
8-161 S
INU
ME
RIK
802D sl 선
삭 가
공 조
작 및
프로
그램
(BP
-D) 설
명서
, 2006년
10월
판
6FC
5398-1CP
10-2LA0
프로그래밍
N10 G90 X10 Z=IC(20) ;Z - 증분 치수, X - 절대 치수
N10 IF R1>5 GOTOF LABEL3 ... N80 LABEL3: ...
G96 참조
N10 MEAS=-1 G1 X... Z... F...
N10 MEAS=-1 G1 X... Z... F...
N10 $A_DBR[5]=16.3 ; 실제 변수 쓰기 ; 위치 5 사용 ; (위치, 형식 및 측정이 NC와 PLC 사이에 선언됨)
N10 $A_MONIFACT=5.0 ; 공구 수명이 5배나 더 빨리 만료됨
N10 IF $AA_FXS[X1]==1 GOTOF ....
N10 R1=$AA_MM[X]
N10 R2=$AA_MW[X]
N10 IF $AC_MEAS[1]==1 GOTOF .... ; 프로브가 전환된 경우 프로그램 계속 진행...
정보
치수는 G90과 상관 없이 특정 축의 중심점이나 끝점에 대해 지정할 수 있습니다.
점프 조건이 충족되면 다음 레이블이 지정된 블록으로 GoTo 작업이 수행됩니다. 그렇지 않으면 다음 명령/블록을 진행합니다. 한 블록 안에서 몇 개의 IF 명령을 사용할 수 있습니다. 관계 연산자: = = 같음, <> 같지 않음 > 보다 큼, < 보다 작음 >= 크거나 같음 <= 보다 작거나 같음
주속 일정제어를 적용한 상태에서 G96과 G97 기능를 사용하여 스핀들 속도 제한
=+1: 입력1 측정, 상승 에지=-1: 입력1 측정, 하강 에지
=+1: 입력1 측정, 상승 에지=-1: 입력1 측정, 하강 에지
PLC 변수 읽기 및 쓰기
초기값: 1.0
값: 0 ... 5 축: 기계 축 식별자
축: 측정 시 축(X, Z) 이송 식별자
축: 측정 시 축(X, Z) 이송 식별자
기본 조건: 0: 기본 조건, 프로브 전환되지 않음1: 프로브 전환됨
값 할당
-
-
0.001 ... 99 999.999
+1 -1
+1 -1
> 0.0
-
-
-
-
의미
증분 치수를 사용하여 지정한 좌표
점프 조건
G96, G97을 사용하여 스핀들 최고 속도 제한
이동할 거리 삭제를 사용하여 측정
이동할 거리 삭제를 사용하지 않고 측정
데이터 바이트 데이터 워드 데이터 더블 워드 실제 데이터
공구 수명 모니터링 인수
상태, 고정 정지점로 이동
기계 좌표계의 축에 대한 측정 결과
공작물 좌표계의 축에 대한 측정 결과
측정 작업 상태
주소
IC
IF
LIMS
MEAS
MEAW
$A_DBB[n] $A_DBWn[n] $A_DBD[n] $A_DBR[n]
$A_MONI-FACT
$AA_FXS [Axis]
$AA_MM[ axis]
$AA_MW[축]
$AC_MEA[1]

프로
그래
밍
8-162
SIN
UM
ER
IK 802D
sl 선삭
가공
조작
및 프
로그
램(B
P-D
) 설명
서, 2006
년 10
월판
6FC
5398-1CP
10-2LA0
N10 IF $AC_CYCLE_TIME==50.5 ....
N10 IF $P_TOOLNO==12 GOTOF ....
N10 IF $P_TOOL==1 GOTOF ....
N10 IF $TC_MOP1[13,1]<15.8 GOTOF ....
N10 IF $TC_MOP1[13,1]<15.8 GOTOF ....
N10 IF $TC_MOP1[13,1]<15 GOTOF ....
N10 IF $TC_MOP1[13,1]<8 GOTOF ....
시스템 변수: 마지막 컨트롤러 스타트업 이후 경과된 시간 모든 NC 프로그램의 총 실행 시간 NC 프로그램 실행 시간(선택한 프로그램에만 해당) 총 사용 시간
시스템 변수: 총 실제 수량 공작물 지령치
읽기 전용
읽기 전용
읽기 전용
스핀들 번호 n =1 또는 =2, 읽기 전용
스핀들 번호 n =1 또는 =2, 읽기 전용
스핀들 번호 n =1 또는 =2, 읽기 전용
스핀들 번호 n =1 또는 =2, 읽기 전용
읽기 전용
읽기 전용
분 단위, 공구 t, D 번호 d에 대한 값을 읽거나 씁니다.
분 단위, 공구 t, D 번호 d에 대한 값을 읽거나 씁니다.
분 단위, 공구 t, D 번호 d에 대한 값을 읽거나 씁니다.
분 단위, 공구 t, D 번호 d에 대한 값을 읽거나 씁니다.
0.0 ... 10+300 min (값 - 읽기 전용) min (값 - 읽기 전용) s s s 0 ... 999 999 999, 정수
-
-
0.0 ...
0.0 ...
0 ... 999 999 999, 정수
0 ... 999 999 999, 정수
실행 시간 타이머: $AN_SETUP_TIME $AN_POWERON_TIME $AC_OPERATING_TIME $AC_CYCLE_TIME $AC_CUTTING_TIME 소재 계수기 $AC_TOTAL_PARTS $AC_REQUIRED
활성 마스터 스핀들 수
프로그램된 마스터 스핀들 번호
구성된 스핀들 수
스핀들 실제 속도
마지막으로 프로그램된 스핀들 n 속도
스핀들 n의 현재 회전 방향
마지막으로 프로그램된 스핀들 n 회전 방향
활성 공구 T의 번호
활성 공구의 활성 D 번호
공구 수명 경고 한계
남은 공구 수명
수량 경고 제한
잔여 수량
$A..._..._ TIME
$AC_..._ PARTS
$AC_ MSNUM
$P_ MSNUM
$P_NUM_ SPINDLES
$AA_S[n]
$P_S[ n ]
$AC_ SDIR[n]
$P_ SDIR[n]
$P_ TOOLNO
$P_TOOL
$TC_MOP 1[t,d]
$TC_MOP 2[t,d]
$TC_MOP 3[t,d]
$TC_MOP 4[t,d]

프로
그래
밍
8-163 S
INU
ME
RIK
802D sl 선
삭 가
공 조
작 및
프로
그램
(BP
-D) 설
명서
, 2006년
10월
판
6FC
5398-1CP
10-2LA0
N10 $TC_MOP11[13,1]=247.5
N10 $TC_MOP13[13,1]=715
N10 IF $TC_TP8[1]==1 GOTOF ....
N10 $TC_TP9[1]=2 ; 수량 모니터링 선택
MSG(”메시지 텍스트”) ; 개별 블록 ... N150 MSG() ; 이전 메시지 삭제 N10 OFFN=12.4
N10 X... Z.... RND=... N11 X... Z...
N10 X... Y.... RNDM=.7.3 ;모달 라운딩 ON N11 X... Y... .... ROT, AROT 참조
DEF REAL VAR2[12]=REP(4.5) ; 모든 요소 값 4.5N10 R10=SET(1.1,2.3,4.4) ; R10=1.1, R11=2.3, R4=4.4 N10 SETMS(2) ; 개별 블록, 2번째 스핀들 = 마스터
G33 참조
N10 SPOS=.... N10 SPOS=ACP(...) N10 SPOS=ACN(...) STOPFIFO ;개별 블록, 채움 시작 N10 X... N20 X...
분 단위, 공구 t, D 번호 d에 대한 값을 읽거나 씁니다.
공구 t, D 번호 d에 대한 값을 읽거나 씁니다.
기본 상태 - 공구 t에 대해 비트로 코딩(비트 0 ~ 4)
공구 t에 대한 모니터링 유형, 쓰기 또는 읽기 0: 모니터링 안 함, 1: 공구 수명, 2: 공작물 수
메시지 텍스트는 따옴표 안에 지정
공구 반경 보정 G41, G42가 활성화된 상태에서만 유효합니다.
지정된 반경 값의 라운딩을 두 개의 형상 블록 사이에 접하도록 삽입합니다.
- 지정된 반경의 라운딩을 모든 후속 보정에 삽입, 특수 피드 FRCM= ... 사용 가능 - 모달 라운딩 OFF
각도 지정, 현재 평면 G17 ~ G19에서 프로그램 가능한 회전 각도
SET: 다양한 값, 지정한 요소에서 값 개수만큼 REP: 다양한 값, 지정한 요소에서 필드끝까지
n: 스핀들 번호, SETMS만 설정된 경우 기본 스핀들이 적용됩니다.
각도로 지정됩니다. G33에서 나사 시작점이 지정된 값만큼 옵셋됩니다.
n =1 또는 =2, 축 식별자: 예: “SP1" 또는 “C”
각도로 지정됩니다. 스핀들이 지정된 위치에서 정지합니다.(지정된 위치에서 정지하기 위해서는 스핀들이 해당 기술적인 요건(위치 제어)을 제공해야 합니다. 스핀들 번호 1 또는 2특수 기능. STARTFIFO "Buffer memory full(버퍼 메모리 다 참)" 또는 "프로그램 끝"이 감지될 때까지 버퍼 메모리를 채웁니다.
0.0 ...
0 ... 999 999 999, 정수
-
0 ... 2
최대 65자
-
0.010 ... 99 999.999
0.010 ... 99 999.999 ±0.00001 ... 359.9999
n= 1 또는 n= 2
0.001 ... 359.999
0.0000 ... 359.9999
-
공구 수명 지령치
프로그램된 장치 수량
공구의 상태
공구 모니터링 유형
메시지
TRACYL에 대한 홈 너비, 그렇지 않으면 치수 n 지정
라운딩
모달 라운딩
ROT, AROT를 사용한 회전 각도
가변 필드에 대한 값 설정
스핀들을 마스터 스핀들로 정의
G33을 사용할 때 나사 시작점
스핀들 번호 n을 축 식별자로 변환합니다.
스핀들 위치
고속 가공 단계 중지
$TC_MOP 11[t,d]
$TC_MOP 13[t,d]
$TC_TP8[t]
$TC_TP9[t]
MSG( )
OFFN
RND
RNDM
RPL
SET( , , , ) REP() SETMS(n) SETMS
SF
SPI(n)
SPOS STOPFIFO
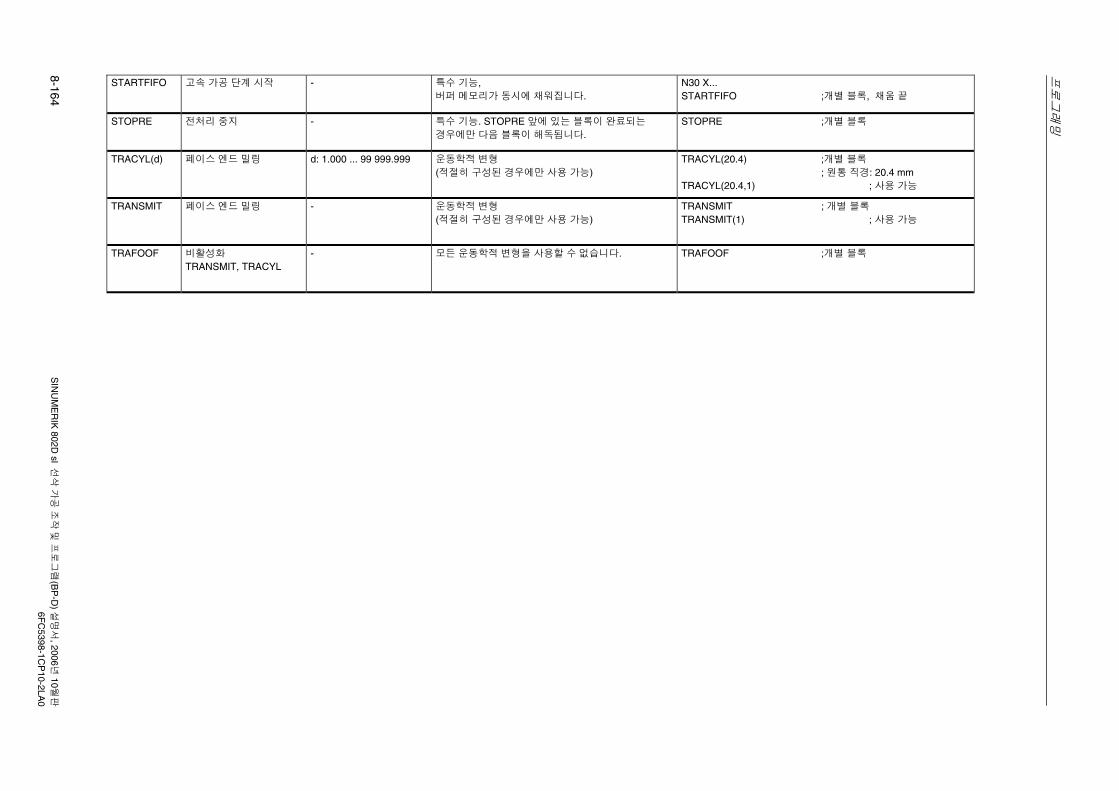
프로
그래
밍
8-164
SIN
UM
ER
IK 802D
sl 선삭
가공
조작
및 프
로그
램(B
P-D
) 설명
서, 2006
년 10
월판
6FC
5398-1CP
10-2LA0
N30 X... STARTFIFO ;개별 블록, 채움 끝
STOPRE ;개별 블록
TRACYL(20.4) ;개별 블록 ; 원통 직경: 20.4 mm TRACYL(20.4,1) ; 사용 가능
TRANSMIT ; 개별 블록 TRANSMIT(1) ; 사용 가능
TRAFOOF ;개별 블록
특수 기능, 버퍼 메모리가 동시에 채워집니다.
특수 기능. STOPRE 앞에 있는 블록이 완료되는 경우에만 다음 블록이 해독됩니다.
운동학적 변형 (적절히 구성된 경우에만 사용 가능)
운동학적 변형 (적절히 구성된 경우에만 사용 가능)
모든 운동학적 변형을 사용할 수 없습니다.
-
-
d: 1.000 ... 99 999.999
-
-
고속 가공 단계 시작
전처리 중지
페이스 엔드 밀링
페이스 엔드 밀링
비활성화 TRANSMIT, TRACYL
STARTFIFO
STOPRE
TRACYL(d)
TRANSMIT
TRAFOOF

프로그래밍
8.2 위치 데이터
8-165 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.2 위치 데이터
8.2.1 치수 프로그램
이 절에서는 도면에서 받은 치수를 직접 프로그램할 수 있는 명령에 대해 설명합니다. 이 프로
그래밍에는 NC 프로그래밍에 필요한 다양한 계산을 수행할 필요가 없다는 장점이 있습니다.
참고
이 절에 설명된 명령은 일반적으로 NC 프로그램 시작 시 나타납니다. 일반적으로는 이러한 기능을 함께 사용합니다. 예를 들면, NC 프로그램의 또 다른 부분에서 작업 평면을 선택할 수 있습니다. 보다 정확히 말하면, 이 절과 후속 절은 NC 프로그램의 “기존” 구조에 기반을 둔 나사
에 대한 지침으로 사용됩니다.
일반적으로는 이러한 기능을 함께 사용합니다. 예를 들면, NC 프로그램의 또 다른 부분에서 작업 평면을 선택할 수 있습니다.
보다 정확히 말하면, 이 절과 후속 절은 NC 프로그램의 “기존” 구조에 기반을 둔 나사에 대한 지침으로 사용됩니다.
일반 치수 개요
대부분의 NC 프로그램의 기초는 구체적인 치수가 명시된 도면입니다.

프로그래밍
8.2 위치 데이터
8-166 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
NC 프로그램으로 변환하는 경우, 공작물 도면의 치수를 가공 프로그램에 정확히 전달하는 데 유용합니다. 다음은 일반 치수입니다.
• 절대 치수 G90은 블록의 모든 축에 모달식으로 적용되며, 후속 블록에서 G91를 통해 해제
될 때까지 유효합니다.
• 절대 치수 X=AC(값). 이 값은 명시된 축에만 적용되며 G90/G91에 영향을 받지 않습니다. 모든 축에 사용할 수 있으며, SPOS, SPOSA 스핀들 위치 지정 및 보간 파라메타 I, J, K에
도 사용할 수 있습니다.
• 최단 경로를 통해 위치에 직접 접근하는 절대 치수 X=CC(값). 이 값은 명시된 로타리 축에
만 적용되며 G90/G91에 영향을 받지 않습니다. SPOS, SPOSA 스핀들 위치 지정에도 사용할 수 있습니다.
• 양의 방향으로 위치에 접근하는 절대 치수 X=ACP(값). 이 값은 로타리 축에 대해서만 설정되며, 머신 데이터에서 0...< 360도로 설정되는 범위입니다.
• 음의 방향으로 위치에 접근하는 절대 치수 X=ACN(값). 이 값은 로타리 축에 대해서만 설정되며, 머신 데이터에서 0...< 360도로 설정되는 범위입니다.
• 증분 치수 G91은 블록의 모든 축에 모달식으로 적용되며, 후속 블록에서 G90를 통해 해제
될 때까지 유효합니다.
• 증분 치수 X=IC(값). 이 값은 명시된 축에만 적용되며 G90/G91에 영향을 받지 않습니다. 모든 축에 사용할 수 있으며, SPOS, SPOSA 스핀들 위치 지정 및 보간 파라메타 I, J, K에
도 사용할 수 있습니다.
• 인치 치수 G70은 블록 내 모든 직선축에 적용되며 후속 블록에서 G71을 통해 해제될 때까
지 유효합니다.
• 미터 단위 치수 G71은 블록 내 모든 직선축에 적용되며 후속 블록에서 G70을 통해 해제될 때까지 유효합니다.
• G70에 관한 인치 치수지만 피드 및 길이 관련 셋팅 데이터에도 적용됩니다.
• G71에 관한 미터 단위 치수지만 피드 및 길이 관련 셋팅 데이터에도 적용됩니다.
• 직경 프로그래밍, DIAMON on
• 직경 프로그래밍, DIAMOF off
G90에서 블록 이동을 위한 직경 프로그래밍 DIAM90. G91에서 블록 이동을 위한 반경 프로
그래밍.

프로그래밍
8.2 위치 데이터
8-167 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.2.2 절대/증분 치수 기입: G90, G91, AC, IC
기능
G90/G91 명령을 사용할 경우 작성된 위치 데이터 X, Z, ...는 좌표점(G90)으로 평가되거나 이송할 축 위치(G91)로 평가됩니다. G90/G91은 모든 축에 적용됩니다. G90/G91과 상관 없이 AC/IC를 사용하면 특정 블록에 대한 특정 위치 데이터를 절대/증분 치수로 지정할 수 있습니다.
끝점이 도달되는 경로는 이러한 명령에 의해서 결정되지 않고 G 그룹(G0, G1, G2 및 G3... 8.3절 “축 이송” 참조)에 의해 제공됩니다.
프로그래밍
G90 ; 절대 치수 기입 G91 ; 증분 치수 기입 Z=AC(...) ; 특정 축(여기서는 Z축)에 대한 절대 치수 기입, 비모달 Z=IC(...) ; 특정 축(여기서는 Z축)에 대한 증분 치수 기입, Z축)에 대한 절대 치수 기입, 비모달
그림 8-3 도면의 다양한 치수 기입 유형
절대 치수 기입 G90
절대 치수 기입을 사용할 경우, 치수 데이터는 현재 활성 좌표계(WCS 또는 MCS)의 영점을 의미합니다. 이 값은 현재 활성화되어 있는 옵셋(프로그램 가능, 설정 가능 또는 옵셋 없음)에 따라 달라집니다.
프로그램 시작시, G90는 모든 축에 활성화되어 있으며 G91(증분 치수 기입 데이터)을 통해 이후 블록에서 선택이 취소될 때까지 활성 상태로 유지됩니다(모달식 활성).
증분 치수 기입 G91
증분 치수 기입을 사용하면 경로 정보의 수치값은 이송할 축 경로에 해당합니다. 선행 기호는
이송 방향을 나타냅니다.
G91은 모든 축에 적용되며 G90(절대 치수 기입)을 통해 이후 블록에서 선택 취소될 수 있습
니다.
G91; 증분 치수 기입 G90; 절대 치수 기입

프로그래밍
8.2 위치 데이터
8-168 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
=AC(...), =IC(...)로 지정
끝점 좌표 뒤에 등호를 지정하십시오. 값은 소괄호 안에 지정해야 합니다. =AC(...)를 사용하면 원 중심점에 대해 절대 치수를 사용할 수도 있습니다. 그렇지 않으면, 원 중심의 기준점이 원의 시작점입니다.
프로그램 예제
N10 G90 X20 Z90 ; 절대 치수 기입 N20 X75 Z=IC(-32) ; X 절대 치수 기입, Z 증분 치수 기입 ... N180 G91 X40 Z20 ; 증분 치수 기입으로 전환 N190 X-12 Z=AC(17) ; X 증분 치수 기입, Z 절대 치수 기입
8.2.3 미터 및 인치 단위 치수: G71, G70, G710, G700
기능
제어 시스템의 기본 시스템 설정에서 파생되는 공작물 치수가 있으면 (inch 또는 mm) 프로그
램에서 치수를 직접 입력할 수 있습니다. 그리고 나면 제어 시스템에서 기본 시스템으로의 필수 변환을 수행합니다.
프로그래밍
G70 ; 인치 치수 표기 G71 ; 미터 치수 표기
G700 ; 인치 치수 표기, F(Feed) G710 ; 미터 치수 표기, F(Feed)
프로그램 예제
N10 G70 X10 Z30 ; 인치 치수 표기 N20 X40 Y50 ; G70 활성 상태 유지 ... N80 G71 X19 Z17.3 ; 여기서부터 미터 치수 표기

프로그래밍
8.2 위치 데이터
8-169 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
정보
선택한 기본 설정에 따라 시스템에서 모든 형상 값을 미터 또는 인치 치수로 해석합니다. 디스
플레이를 포함하여 공구 보정 및 설정 가능한 보정도 형상 값으로 간주되어야 합니다. 이 점은
mm/min 또는 in/min 단위의 피드 F에도 적용됩니다. 기본 설정은 머신 데이터에서 설정할 수
있습니다.
이 설명서의 모든 예는 미터법 기본 설정에 기초합니다.
따라서 G70 또는 G71은 인치 또는 미터 단위로 공작물을 직접 참조하는 모든 형상 파라메타
를 평가합니다. 예를 들면, 다음과 같습니다.
• 위치 데이터 X, Z, ... G0,G1,G2,G3,G33, CIP, CT용
• 보간 파라메타 I, K(나사 리드도)
• 원호 반경 CR
• 프로그램 가능 워크 옵셋(TRANS, ATRANS)
피드, 공구 보정 및 설정 가능한 워크 옵셋과 같이 공작물 파라메타로 전달되지 않고 남아 있는
모든 형상 파라메타는 G70/G71의 영향을 받지 않습니다.
하지만 G70/G71는 피드 F(in/min, in/rev 또는 mm/min, mm/rev)에 영향을 줍니다.
8.2.4 반경/직경 치수 표기: DIAMOF, DIAMON
기능
선삭 가공 기계의 부품 가공의 경우 일반적으로 X축(이송 축)에 대한 위치 데이터를 직경 치수 표기로 프로그램합니다. 필요할 경우 프로그램에서 반경 치수 표기로 전환될 수도 있습니다. DIAMOF 또는 DIAMON에서는 X축의 끝점 지정을 반경 또는 직경 치수 지정으로 해석합니다. 따라서 실제 값은 공작물 좌표계로 표시됩니다.
DIAM90의 경우, 이송 방법(G90/G91)과 상관 없이, 이송 축의 실제값은 항상 직경으로 표시됩
니다. 또한 MEAS, MEAW, $P_EP[x] 및 $AA_IW[x]를 사용하는 공작물 좌표계에서 실제값을 판독할 때도 직경이 사용됩니다.

프로그래밍
8.2 위치 데이터
8-170 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그래밍
DIAMOF ; 반경 치수 기입
DIAMON ; 직경 치수 기입
그림 8-4 이송 축의 직경 및 반경 치수 표기
프로그램 예제
N10 G0 X0 Z0 ; 시작점에 접근 N20 DIAMOF ; 직경 치수 입력 N30 G1 X30 S2000 M03 F0.8 ; X 축= 이송 축, 반경 치수 기입 활성화 ; 반경 위치 X30로 이송 N40 DIAMON ; 직경 치수 기입 활성화 N50 G1 X70 Z-20 ; 직경 위치 X70 및 Z-20으로 이송 N60 Z-30 N70 DIAM90 ; 절대 치수 기입을 위한 직경 프로그래밍 ; 증분 치수 기입을 위한 반경 프로그래밍 N80 G91 X10 Z-20 ; 증분 치수 기입 N90 G90 X10 ; 절대 치수 기입 N100 M30 ; 프로그램 종료
참고
TRANS X... 또는 ATRANS X...를 사용한 프로그램 가능 옵셋은 항상 반경 치수 기입으로 평가됩니다. 기능 설명: 다음 절을 참조하십시오.
8.2.5 프로그램 가능한 워크 옵셋: TRANS, ATRANS
기능
다음의 경우에는 프로그램 가능한 워크 옵셋을 사용할 수 있습니다.
• 공작물에 대해 다양한 위치에서 형상/배열이 반복되는 경우
• 치수 기입을 위한 새 기준점을 선택하는 경우
• 황삭 시 가공 공차로 사용하는 경우

프로그래밍
8.2 위치 데이터
8-171 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
이로 인해 현재 공작물 좌표계가 됩니다. 재기록된 치수는 이 옵셋을 기준으로 사용합니다.
옵셋은 모든 축에서 가능합니다.
참고: X 축에서 공작물 영점은 DIAMON을 이용한 직경 프로그램 기능과 G96을 이용한 '주속 일정 제어' 기능 때문에 선반에 있어야 합니다. 이러한 이유로 X 축에서는 옵셋을 사용하지 않거나 공차와 같은 작은 옵셋을 사용하십시오.
그림 8-5 프로그램 가능 옵셋의 영향
프로그래밍
TRANS X... ; 프로그램 가능한 옵셋 옵셋, 회전, 배율 팩터, 미러링에 대한 이전 명령을 지웁니다. ATRANS Z... ; 프로그램 가능한 옵셋 기존 명령에 추가됩니다. TRANS ; 값 없음: 옵셋, 회전, 배율 팩터, 미러링에 대한 이전 명령을 지웁니다. TRANS/ATRANS 관련 명령에는 항상 개별 블록이 필요합니다.
프로그램 예제
N10 ... N20 TRANS Z5 ; 프로그램 가능 옵셋, Z축으로 5 mm N30 L10 ; 서브루틴 호출; 옵셋 지정될 형상을 포함합니다. ... N70 TRANS ; 옵셋 삭제됨 ...
서브루틴 호출 - 8.11절 “서브루틴 기법” 참조

프로그래밍
8.2 위치 데이터
8-172 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.2.6 프로그램 가능 배율 팩터: SCALE, ASCALE
기능
SCALE, ASCALE을 사용하여 모든 축에 대해 배율 팩터를 프로그램할 수 있습니다. 경로는 지정된 축에서 이 팩터 만큼 확대 또는 축소됩니다.
현재 설정된 좌표계는 배율 변경 참조로 사용됩니다.
프로그래밍
SCALE X... Z... ; 프로그램 가능 배율 팩터, 옵셋, 회전, 배율 팩터, 미러링에 대한 이전 명령을 지웁니다. ASCALE X... Z... ; 프로그램 가능한 배율 팩터, 기존 명령에 추가됩니다. SCALE ; 값 없음: 옵셋, 회전, 배율 팩터, 미러링에 대한 이전 명령을 지웁니다. SCALE, ASCALE 관련 명령에는 항상 개별 블록이 필요합니다.
참고 사항
• 원의 경우, 양축에서 모두 동일한 인수를 사용해야 합니다.
• SCALE/ASCALE이 활성화된 상태로 ATRANS를 프로그램하는 경우 이러한 옵셋 값의 배율도 조정됩니다.
그림 8-6 프로그램 가능한 배율 팩터의 예제
프로그램 예제
N20 L10 ; 프로그램된 형상 원본
N30 SCALE X2 Y2 ; 형상이 X와 Z축으로 2배 확대됨
N40 L10
...
서브루틴 호출 - 8.11절 “서브루틴 기법” 참조

프로그래밍
8.2 위치 데이터
8-173 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
정보
프로그램 가능한 옵셋 및 배율 팩터 외에도 다음 기능이 있습니다:
프로그램 가능한 회전 ROT, AROT 및
프로그램 가능한 미러링 MIRROR, AMIRROR.
이러한 기능은 기본적으로 밀링에 사용됩니다. 선반에서는 TRANSMIT 또는 TRACYL(8.14절
“선삭 가공 기계에서의 밀링” 절 참조)을 사용하여 밀링할 수도 있습니다.
회전 및 미러링 예제: 8.1.6절 “명령 목록” 참조
자세한 설명: 참조: “조작 및 프로그램 설명서 – 밀링” SINUMERIK 802D sl
8.2.7 공작물 클램핑 - 설정 가능한 워크 옵셋: G54 ~ G59, G500, G53, G153
기능
설정 가능한 워크 옵셋은 기계의 공작물 영점 (기계 영점에 대한 공작물 영점 옵셋)의 위치를 지정합니다. 이 옵셋은 공작물을 기기로 클램핑할 때 결정되며 조작자에 의해 해당 데이터 필드에 입력되어야 합니다. 이 값은 G54 ~ G59의 6가지 그룹 중에서 선택함으로써 프로그램을 통해 활성화됩니다.
작동에 대한 자세한 내용은 “워크 옵셋 설정/변경” 절을 참조하십시오.

프로그래밍
8.2 위치 데이터
8-174 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그래밍
G54 ; 1번째 설정 가능한 워크 옵셋
G55 ; 2번째 설정 가능한 워크 옵셋
G56 ; 3번째 설정 가능한 워크 옵셋
G57 ; 4번째 설정 가능한 워크 옵셋
G58 ; 5번째 설정 가능한 워크 옵셋
G59 ; 6번째 설정 가능한 워크 옵셋
G500 ; 설정 가능한 워크 옵셋 OFF - 모달
G53 ; 설정 가능한 워크 옵셋 OFF - 비모달
프로그램 가능 옵셋도 숨깁니다.
G153 ; G53에서와 같습니다. 기본 프레임도 숨깁니다.
그림 8-7 설정 가능한 워크 옵셋
프로그램 예제
N10 G54 ... ; 첫 번째 설정 가능한 워크 옵셋 호출 N20 X... Z... ; 공작물 가공 ... N90 G500 G0 X... ; 설정 가능한 워크 옵셋 비활성화
8.2.8 프로그램 가능 작업 영역 제한: G25, G26, WALIMON, WALIMOF
기능
G25, G26을 사용하면 작업 영역 외부에서는 이송할 수 없도록 이동 가능한 모든 축에 대해 작
업 영역을 정의하여 할 수 있습니다. 공구 길이 보정 기능이 동작되면 공구 팁이 중요한 요소
가 됩니다. 좌표 파라메타는 기계를 기반으로 합니다.
작업 영역 제한을 사용하려면 관련 축에 대해 작업 영역 제한을 활성화해야 합니다. 이 작업은
“Offset Param(옵션 파라메타)”> “Setting data(셋팅 데이터)”> “Working area limit(작업 영역
제한)”에서 입력 화면을 통해 수행됩니다.

프로그래밍
8.2 위치 데이터
8-175 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
작업 영역은 다음 두 가지 방법으로 정의할 수 있습니다.
• 제어 시스템의 “Offset Param(옵션 파라메타)”> “Setting data(셋팅 데이터)”> “Working area limit(작업 영역 제한)”에서 입력 화면을 사용하여 값을 입력합니다.
이렇게 하면 작업 영역 제한이 조그 모드에서도 적용됩니다.
• G25/G26을 사용하여 프로그램
가공 프로그램에서 개별 축의 값을 변경할 수 있습니다. 이 경우 입력 화면(“Offset Param(옵션 파라메타)”> “Setting data(셋팅 데이터)”> “Working area limit(작업 영역 제한)”)에 입력된 값을 덮어쓰게 됩니다.
작업 영역 제한은 WALIMON/WALIMOF에 의해 프로그램에서 활성화/비활성화됩니다.
프로그래밍
G25 X... Z... ; 작업 영역 하한 G26 X... Z... ; 작업 영역 상한 WALIMON ; 작업 영역 제한 ON WALIMOF ; 작업 영역 제한 OFF
그림 8-8 프로그램 가능 가공 영역 한계
참고 사항
• G25, G26의 경우 MD 20080: AXCONF_CHANAX_NAME_TAB으로 구성되는 채널 축 식별자를 사용해야 합니다. SINUMERIK 802D sl을 사용할 경우 운동학적 변형(TRANSMIT, TRACYL)도 가능합니다. 경우에 따라서는 MD 20080과 형상 축 이름 MD 20060에 대해 서로 다른 축 이름이 사용
되기도 합니다: AXCONF_GEOAX_NAME_TAB.
• G25, G26은 스핀들 속도 제한을 나타내는 주소 S에 연결할 때 사용됩니다(“스핀들 속도 제한” 절 참조).
• 작업 영역 제한은 관련 축의 원점 복귀 경우에만 활성화될 수 있습니다.
프로그래밍
8.2 위치 데이터
8-176 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 예제
N10 G25 X0 Z40 ; 작업 영역 제한보다 낮은 값 N20 G26 X80 Z160 ; 작업 영역 제한보다 높은 값 N30 T1 N40 G0 X70 Z150 N50 WALIMON ; 작업 영역 제한 ON ... ; 작업 영역 내에서만 작동 N90 WALIMOF ; 작업 영역 제한 OFF

프로그래밍
8.3 축 이송
8-177 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.3 축 이송 8.3.1 급 이송을 이용한 선형 보간: G0
기능
급 이송 G0은 공작물 직접 가공용이 아니라 공구의 급속 배치에 사용됩니다. 모든 축은 직선형 경로에서 동시에 이송될 수 있습니다.
각 축의 경우 최대 속도(급 이송)는 머신 데이터에 정의됩니다. 한 축만 이송하는 경우에 급 이송을 사용합니다. 두 개의 축이 동시에 이송되면 양축을 고려하여 최대 경로 속도에 도달하기 위한 경로 속도(결과 속도)가 선택됩니다.
프로그램된 피드(F 워드)는 G0에서는 의미가 없습니다. G0은 이 G 그룹(G1, G2, G3 ...)의 다른 명령을 통해 취소될 때까지 활성화된 상태로 유지됩
니다.
그림 8-9 점 P1에서 P2로의 급 이송을 이용한 선형 보간
프로그램 예제
N10 G0 X100 Z65 참고: 선형 프로그램의 다른 옵션은 각도 지정 ANG=을 통해 사용할 수 있습니다 (“형상 정의 프로그래밍” 절 참조).
정보
해당 위치로 이동하는 데 사용할 수 있는 다른 G 명령 그룹이 있습니다 (8.3.14절 “정위치 정지/연속 경로 모드: G60, G64” 참조). G60 정위치 정지의 경우에는 다른 G 그룹을 사용하여 다양한 정밀도 값이 제공되는 창을 선택할 수 있습니다. 정위치 정지의 경우, 비모달 효과를 지닌 대체 명령 G9가 있습니다. G9. 배치 작업에 적용하려면 이러한 옵션을 고려해야 합니다.

프로그래밍
8.3 축 이송
8-178 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.3.2 피드 G1을 이용한 선형 보간 G1
기능
공구가 직선 경로를 따라 시작점에서 끝점으로 이동합니다. 경로 속도는 프로그램된 F 워드에 의해 결정됩니다. 모든 축이 동시에 이송될 수 있습니다. G1은 이 G 그룹 (G0, G2, G3 ...)의 다른 명령을 통해 취소될 때까지 활성화된 상태로 유지됩
니다.
그림 8-10 G1을 이용한 선형 보간
프로그램 예제
N05 G54 G0 G90 X40 Z200 S500 M3 ; 공구가 급 이송으로 이송됨 스핀들 속도 = 500 rev/min, CW 회전
N10 G1 Z120 F0.15 ; 피드 0.15 mm/rev로 선형 보간 N15 X45 Z105 N20 Z80 N25 G0 X100 ; 급 이송으로 후진 N30 M2 ; 프로그램 종료
참고: 선형 프로그램의 다른 옵션은 각도 지정 ANG=을 통해 사용할 수 있습니다(“형상 정의 프로그래밍” 절 참조).

프로그래밍
8.3 축 이송
8-179 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.3.3 원형 보간: G2, G3
기능
공구가 회전 경로를 따라 시작점에서 끝점으로 이동합니다. 방향은 G 기능을 통해 결정됩니다.
그림 8-11 회전 G2/G3의 회전 정의
필요한 원에 대한 설명을 다양한 방법으로 제공할 수 있습니다.
그림 8-12 G2/G3을 사용한 순환 경로 프로그래밍 옵션. 예: G2 사용
G2/G3은 이 G 그룹(G0, G1, ...)의 다른 명령을 통해 취소될 때까지 활성 상태를 유지합니다. 경로 속도는 프로그램된 F 워드에 의해 결정됩니다.

프로그래밍
8.3 축 이송
8-180 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그래밍
G2/G3 X... Z... I... ; 중점 및 끝점 K... G2/G3 CR=... X... ; 원 반경 및 끝점 Z... G2/G3 AR=... I... ; 틈 각도 및 중점 K... G2/G3 AR=... X... ; 틈 각도 및 끝점 Z... G2/G3 AP=... RP=... ; 극좌표, 극 주변 원
참고
추가로 이용 가능한 호 프로그램 작성: CT – 접선 전이를 사용하는 원 CIP – 중간점을 통과하는 원(다음 절 참조)
원 입력 공차
원은 특정 치수 공차를 사용하는 시스템에서만 허용됩니다. 여기서는 시작점과 끝점에서의 원 반경이 비교됩니다. 차이가 공차 범위 안에 있으면 중점이 내부적으로 정확하게 설정됩니
다. 그렇지 않으면, 알람 메시지가 표시됩니다.
공차 값은 머신 데이터를 통해 설정할 수 있습니다(“조작 설명서” 802Dsl 참조).
프로그램 작성 예제: 중점과 끝점 정의
그림 8-13 중점과 끝점 지정 예

프로그래밍
8.3 축 이송
8-181 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
N5 G90 Z30 X40 ; N10의 원 시작점 N10 G2 Z50 X40 K10 I-7 ; 끝점 및 중간점
참고: 중점 값은 호 시작점을 나타냅니다!
프로그램 작성 예제: 끝점과 반경 지정
그림 8-14 끝점과 반경 지정 예
N5 G90 Z30 X40 ; N10의 원 시작점 N10 G2 Z50 X40 CR=12.207 ; 끝점과 반경
참고: CR=-...을 사용하면 값 앞에 음수 부호를 붙이면 반원보다 큰 원 부분이 선택됩니다.
프로그램 작성 예제: 끝점과 틈 각도 정의
그림 8-15 끝점과 틈 각도 지정 예

프로그래밍
8.3 축 이송
8-182 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
N5 G90 Z30 X40 ; N10의 원 시작점 N10 G2 Z50 X40 AR=105 ; 끝점과 틈 각도
프로그램 작성 예제: 중점과 틈 각도 정의
그림 8-16 중점과 틈 각도 지정 예
N5 G90 Z30 X40 ; N10의 원 시작점 N10 G2 K10 I-7 AR=105 ; 중간점 및 틈 각도 참고: 중점 값은 원 시작점을 나타냅니다!

프로그래밍
8.3 축 이송
8-183 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.3.4 중간점 CIP를 통과하는 호 보간 CIP
기능
원 방향은 중간점 위치에서 여기로 이어집니다(시작점과 끝점 간). 중간점 지정: I1=... (X축), K1=... (Z축). CIP는 G 그룹(G0, G1, ...)의 다른 명령을 통해 취소될 때까지 활성화된 상태로 유지됩니다.
구성된 치수 데이터 G90 또는 G91은 끝점 및 중간점에 적용됩니다.
그림 8-17 끝점과 중간점 지정을 사용한 원 (G90 예 사용)
프로그램 예제
N5 G90 Z30 X40 ; N10의 원 시작점 N10 CIP Z50 X40 K1=40 I1=45 ; 끝점과 중간점
8.3.5 접선 전이를 사용한 원: CT
기능
현재 평면(G18: Z/X 평면)에서 CT와 프로그램된 끝점을 사용하면 이전 경로 세그먼트(원 또는 직선)에 접하여 연결되는 원이 생성됩니다. 이렇게 함으로써 이전 경로 부분과 프로그램된 호 끝점의 기하학적 관계에서 원의 반경과 중점이 정의됩니다.
그림 8-18 이전 경로 부분으로 접선 전이되는 원

프로그래밍
8.3 축 이송
8-184 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.3.6 연속 리드를 사용하여 나사 절삭: G33
기능
기능 G33은 다음 연속 리드 유형으로 나사를 가공하는 데 사용할 수 있습니다.
• 원통 구조의 나사
• 테이퍼 구조의 나사
• 외경/내경 나사
• 단일 및 다중 시작 나사
• 다중 블록 나사(일련의 나사)
여기에는 위치 측정 시스템과 스핀들이 필요합니다.
G33은 이 G 그룹(G0, G1, G2, G3 ...)의 다른 명령을 통해 취소될 때까지 활성화된 상태로 유지됩니다.
그림 8-19 예: 원통 나사를 사용한 외경/내경 나사
오른손 또는 왼손 나사
오른손 또는 왼손 나사는 스핀들의 회전 방향으로 설정됩니다 (M3 오른손(CW), M4 왼손
(CCW) - 8.4절 “스핀들 이동” 참조). 그러기 위해서는 주소 S 또는 설정된 회전 속도에서 회전
값을 프로그램해야 합니다.

프로그래밍
8.3 축 이송
8-185 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그래밍
참고 설명: 런인(Runin) 및 런아웃(Runout) 경로에서는 나사 길이를 고려해야 합니다. (자세한 내용은 다음 절 참조)
그림 8-20 G33을 사용하여 나사 값 프로그램 가능
그림 8-21 원통, 테이퍼 및 횡단 나사의 리드 지정
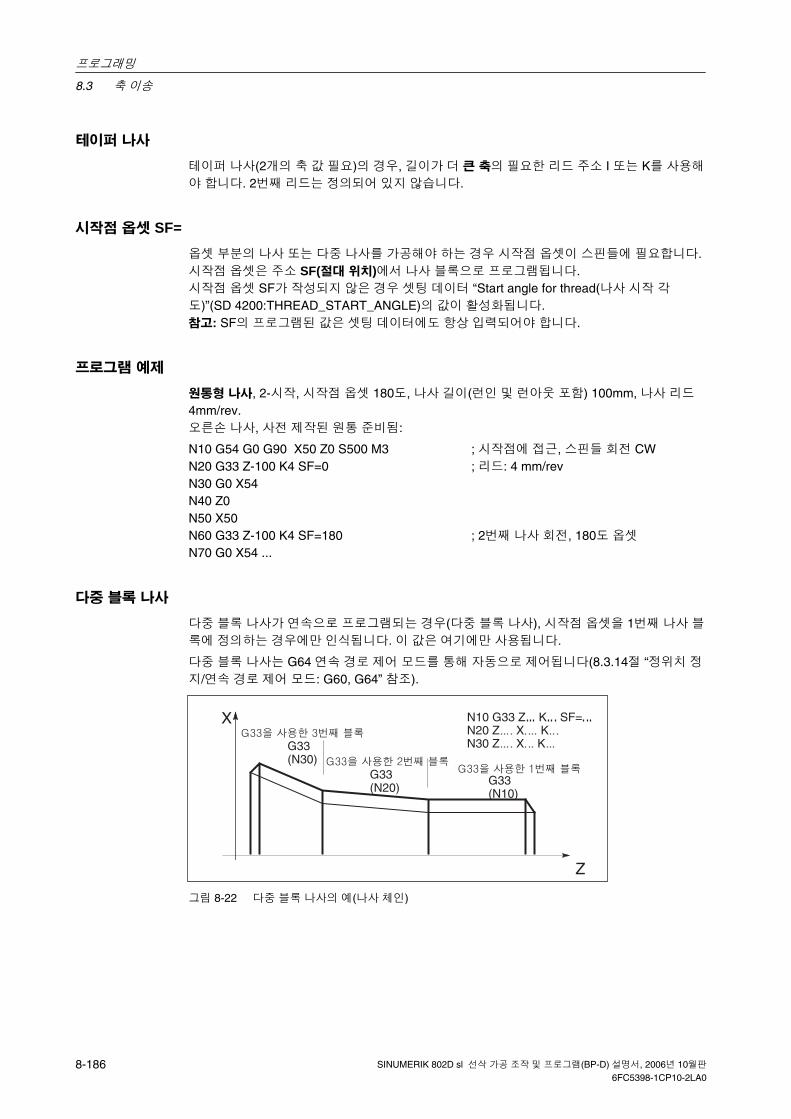
프로그래밍
8.3 축 이송
8-186 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
테이퍼 나사
테이퍼 나사(2개의 축 값 필요)의 경우, 길이가 더 큰 축의 필요한 리드 주소 I 또는 K를 사용해
야 합니다. 2번째 리드는 정의되어 있지 않습니다.
시작점 옵셋 SF=
옵셋 부분의 나사 또는 다중 나사를 가공해야 하는 경우 시작점 옵셋이 스핀들에 필요합니다. 시작점 옵셋은 주소 SF(절대 위치)에서 나사 블록으로 프로그램됩니다. 시작점 옵셋 SF가 작성되지 않은 경우 셋팅 데이터 “Start angle for thread(나사 시작 각도)”(SD 4200:THREAD_START_ANGLE)의 값이 활성화됩니다. 참고: SF의 프로그램된 값은 셋팅 데이터에도 항상 입력되어야 합니다.
프로그램 예제
원통형 나사, 2-시작, 시작점 옵셋 180도, 나사 길이(런인 및 런아웃 포함) 100mm, 나사 리드 4mm/rev. 오른손 나사, 사전 제작된 원통 준비됨:
N10 G54 G0 G90 X50 Z0 S500 M3 ; 시작점에 접근, 스핀들 회전 CW N20 G33 Z-100 K4 SF=0 ; 리드: 4 mm/rev N30 G0 X54 N40 Z0 N50 X50 N60 G33 Z-100 K4 SF=180 ; 2번째 나사 회전, 180도 옵셋 N70 G0 X54 ...
다중 블록 나사
다중 블록 나사가 연속으로 프로그램되는 경우(다중 블록 나사), 시작점 옵셋을 1번째 나사 블록에 정의하는 경우에만 인식됩니다. 이 값은 여기에만 사용됩니다.
다중 블록 나사는 G64 연속 경로 제어 모드를 통해 자동으로 제어됩니다(8.3.14절 “정위치 정지/연속 경로 제어 모드: G60, G64” 참조).
그림 8-22 다중 블록 나사의 예(나사 체인)
프로그래밍
8.3 축 이송
8-187 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
축 속도
G33 나사를 사용하는 경우 나사 길이의 축 속도는 스핀들 속도와 나사 리드의 기본에 따라 결정됩니다. 피드 F와는 관계가 없습니다. 저장됩니다. 그러나 머신 데이터에 정의된 최대 축 속도(급 이송)는 초과할 수 없습니다. 초과할 경우 알람이 발생합니다.
정보
중요
• 스핀들 속도 오버라이드 스위치는 나사 가공에 대해 변경되지 않은 상태로 유지되어야 합니다.
• 피드 오버라이드 스위치는 이 블록에서는 의미가 없습니다.
8.3.7 G33에 대한 프로그램 가능 런인 및 런아웃 경로: DITS, DITE
기능
또한 런인 및 런아웃 경로는 나사 G33을 사용하여 필요한 나사로 이송되어야 합니다. 축의 시
작 및 제동(테이퍼 나사의 경우 양축)이 이러한 영역에서 수행됩니다. 이 경로는 나사 리드, 스
핀들 속도 및 축 동역학(구성)에 좌우됩니다.
런인 또는 런아웃에 사용할 수 있는 거리가 제한되는 경우 이 거리가 충분하도록 스핀들 속도
를 줄여야 할 수도 있습니다.
이러한 경우, 런인및 런아웃 경로를 프로그램 안에서 개별적으로 지정하여 유리한 절삭 값을
산출하고 가공 시간을 단축하거나 이러한 문제를 간편하게 처리할 수 있습니다. 값을 지정하
지 않으면 셋팅 데이터(SD)의 값이 적용됩니다. 프로그램에서의 지정 위치 - SD 42010:
THREAD_RAMP_DISP[0] ... [1]. 이 경로가 구성된 축 가속도로 이송하는 데 충분하지 않으면 가속도 측면에서 축이 오버로드
됩니다. 그러면 나사 런인 경로에 대해 알람 22280 “Programmed run-in path too short(프로그
래램된 런인 경로가 너무 짧음)”이 발행됩니다. 경고는 참고용일 뿐이며 가공 프로그램 실행
에 영향을 미치지 않습니다.
런아웃 경로는 나사 끝에서 라운딩 공차로 사용됩니다. 따라서 후진 시 축 이동에서 원활한 변
경이 일어납니다.
프로그래밍
DITS ; G33의 나사 런인 경로 DITE=... ; G33의 나사 런아웃 경로
DITS 및 DITE 또는 SD 42010 값: THREAD_RAMP_DISP: –1 ... < 0: 구성된 가속율에서 피드 축의 시작/중단 저크는 현재 BRISK/SOFT 프로그래밍에 따라 결정됨 0: 나사 절삭 중 피드 축의 갑작스런 시동/제동 > 0: G33에 대해 런인/런아웃 경로가 미리 정의됨 알람 22280이 발생되지 않도록 하려면 길이가 매우 짧은 런인 및 런아웃 경로의 경우 축의 가속도 제한을 준수해야 합니다. 참고: 리셋/프로그램 시작 후에 SD 42010 값은 -1입니다.

프로그래밍
8.3 축 이송
8-188 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 8-23 나사 G33에 대해 코너 라운딩을 사용하는 런인 경로 및 런아웃 경로
프로그램 예제
...
N40 G90 G0 Z100 X10 M3 S500 N50 G33 Z50 K5 SF=180 DITS=4 DITE=2 ; 런인 4 mm, 런아웃 2 mm N60 G0 X30 ...
8.3.8 가변 리드를 사용하여 나사 절삭: G34, G35
기능
가변 리드를 사용하는 나사는 G34 또는 G35에서 하나의 블록에 생성될 수 있습니다.
• G34 ; (선형) 증가 리드 나사
• G35 ; (선형) 감소 리드 나사
그렇지 않을 경우 두 기능 모두 G33과 동일한 기능 및 전제 조건을 나타냅니다.
G34 또는 G35는 이 G 그룹(G0, G1, G2, G3, G33, ...)에서 다른 명령을 통해 취소될 때가지 활성 상태로 유지됩니다.
나사 리드:
• I 또는 K ; 시작 나사 리드(mm/rev), X축 또는 Z축과 관련됨
리드 변경: G34 또는 G35 관련 블록에서 주소 F에는 리드 변경의 의미가 들어 있습니다. 리드(mm/rev)는 회전할 때마다 변경됩니다.
• F ; 리드 변경(mm/rev. 2)
참고: G34, G35 외부에 있는 주소 F는 G4의 이송 또는 드웰 시간도 나타냅니다. 여기에 프로
그램된 값은 저장된 상태로 유지됩니다.

프로그래밍
8.3 축 이송
8-189 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
F 결정
나사의 초기 및 최종 리드를 이미 알고 있는 경우 다음 공식에 따라 프로그램할 나사 리드 변경 F를 계산할 수 있습니다. | K 2 e - K 2
a | F = ------------------ [mm/rev2] 2*LG 여기서: Ke 축 목표점 좌표의 나사 리드, [mm/rev] Ka 초기 나사 리드(I, K에서 프로그램) [mm/rev] LG [mm] 단위의 나사 길이
프로그래밍
G34 Z... K... F... ; 원통 나사(증가하는 리드) G35 X... I... F... ; 횡형 나사(감소하는 리드) G35 Z... X... K... F... ; 테이퍼 나사(감소하는 리드)
프로그램 예제
; 원통 나사, 감소하는 리드 N10 M3 S40 ; 스핀들 활성화 N20 G0 G54 G90 G64 Z10 X60 ; 시작점에 접근 N30 G33 Z-100 K5 SF=15 ; 나사, 연속 리드 5 mm/rev, ; 15도에서 점 활성화 N40 G35 Z-150 K5 F0.16 ; 초기 리드 5 mm/rev, ; 나사 감소 0.16 mm/rev 2, ; 나사 길이 50 mm, ; 블록 끝에서의 원하는 리드 3 mm/rev N50 G0 X80 ; X축을 따라 후진 N60 Z120 N100 M2
8.3.9 나사 보간: G331, G332
기능
선삭 가공 기계에서 이 기능은 2번째 스핀들(구동 공구)에 주로 사용됩니다. – “2번째 스핀들” 절을 참조하십시오.
이 경우 위치 측정 시스템을 사용하는 위치 제어 스핀들이어야 합니다. G331/G332를 사용할 경우, 스핀들과 축의 동적 속성에서 허용되면 보정 척 없이도 나사를 태핑할 수 있습니다. 그러나 보정 척을 사용하는 경우에는 보정 척에 의해 보정될 경로 차가 감소됩니다. 따라서 보다 빠른 스핀들 속도로 태핑할 수 있습니다.

프로그래밍
8.3 축 이송
8-190 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
드릴링은 G331을 사용하여 수행되며 후진은 G332를 사용하여 수행됩니다. 드릴링 깊이는 Z와 같은 축을 통해 지정되며 나사 리드는 연관된 보간 파라메타(여기서는 K)를 통해 지정됩니다. G332의 경우, G331에서처럼 동일한 리드가 프로그램됩니다. 스핀들 역회전이 자동으로 발생
합니다. 스핀들 속도는 S를 사용하며 M3/M4를 사용하지 않는 상태로 프로그램됩니다. G331/G332를 사용하여 나사를 태핑하기 전에 SPOS=...을 사용하여 위치 제어 모드로 스핀
들을 전환해야 합니다(8.4.3절 “스핀들 위치 지정” 참조).
오른손 나사 또는 왼손 나사
나사 리드의 부호는 스핀들 회전 방향을 결정합니다.
양의 부호: 오른쪽(M3의 경우)
음의 부호: 왼쪽(M4의 경우)
참고 설명: 나사 보간을 사용한 전체 나사 태핑 싸이클이 표준 싸이클 CYCLE84와 함께 제공됩니다.
축 속도
G331/G332의 경우, 나사 길이에 대한 축 속도는 스핀들 속도와 나사 리드에 따라 결정됩니다. 피드 F와는 관계가 없습니다. 저장됩니다. 그러나 머신 데이터에 정의된 최대 축 속도(급 이송)는 초과할 수 없습니다. 초과할 경우 알람이 발생합니다.
프로그램 예제
메트릭 나사 5, 테이블에 대한 리드: 0.8 mm/rev, 사전 가공된 구멍:
N5 G54 G0 G90 X10 Z5 ; 시작점에 접근 N10 SPOS=0 ; 위치 제어 모드에 있는 스핀들 N20 G331 Z-25 K0.8 S600 ; 탭, K 양수 = 스핀들 CW 회전 끝점 –25 mm N40 G332 Z5 K0.8 ; 후진 N50 G0 X... Z...

프로그래밍
8.3 축 이송
8-191 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.3.10 고정점 접근: G75
기능
G75를 사용하면 공구 변경점과 같은 기계 상의 고정점에 접근할 수 있습니다. 위치는 모든 축
에 대해 머신 데이터에 영구적으로 저장됩니다. 옵셋은 적용되지 않습니다. 각 축의 속도는 급
이송입니다.
G75는 비모달식이며 개별 블록이 필요합니다. 기계 축 식별자는 프로그램해야 합니다!
G75 이후 블록에서는 “보간 유형” 그룹(G0, G1,G2, ...)의 이전 G 명령이 다시
활성됩니다.
프로그램 예제
N10 G75 X1=0 Z1=0
참고 설명: X1, Z1 (여기에서는 0)의 프로그램된 위치 값은 무시되지만, 여전히 기록되어야 합니다.
8.3.11 원점 복귀: G74
기능
G74를 사용한 NC 프로그램에서 원점 복귀할 수 있습니다. 기존 축의 방향 및 속도는 머신 데이터에 저장됩니다. G74는 비모달식이며 개별 블록이 필요합니다. 기계 축 식별자는 프로그램해야 합니다! G74 이후 블록에서는 “보간 유형” 그룹(G0, G1,G2, ...)의 이전 G 명령이 다시 활성됩니다.
프로그램 예제
N10 G74 X1=0 Z1=0
참고 설명: X1, Z1 (여기에서는 0)의 프로그램된 위치 값은 무시되지만, 여전히 기록되어야 합니다.

프로그래밍
8.3 축 이송
8-192 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.3.12 터치 프로브를 사용한 측정: MEAS, MEAW
기능
이 기능은 SINUMERIK 802D sl plus 및 pro에서 사용할 수 있습니다. 축 이송 블록 내에 MEAS=... 또는 MEAW=... 명령이 있는 경우, 연결된 측정 프로브의 스위칭 에지에서 이송된 축의 위치가 측정되고 저장됩니다. 측정 결과를 프로그램의 각 축에 대해 읽을 수 있습니다. MEAS의 경우, 프로브의 선택한 스위칭 에지가 나타날 때 축 이송이 중단되고 남아 있는 이동
할 거리는 삭제됩니다.
프로그래밍
MEAS=1 G1 X... Z... F... ; 프로브 상승 에지에서 측정, 이동 거리 삭제 MEAS=-1 G1 X... Z... F... ; 프로브 하강 에지에서 측정, 이동 거리 삭제 MEAW=-1 G1 X... Z... F... ; 프로브 상승 에지에서 측정, 이동 거리 삭제 안 함 MEAW=-1 G1 X... Z... F... ; 프로브 하강 에지에서 측정, 이동 거리 삭제 안 함
주의
MEAW의 경우: 트리거된 후라도 프로그램한 위치에 도달할 때까지 프로브가 계속 이동합
니다. 충돌 위험!
측정 작업 상태
프로브가 전환된 경우 변수 $AC_MEA[1] 변수의 값은 측정 블록 이후 1이고, 그 외에는 0입
니다. 측정 블록이 시작되면 변수는 값=0으로 설정됩니다.
측정 결과
프로브가 제대로 활성화된 경우 측정 블록 이후에 다음 변수를 사용하여 측정 블록에서 이송 된 축에 대해 다음 측정 결과를 사용할 수 있습니다. 기계 좌표계에서: $AA_MM[축] 공작물 좌표계에서: $AA_MW[축] 축은 X 또는 Z를 나타냅니다.

프로그래밍
8.3 축 이송
8-193 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그램 예제
N10 MEAS=1 G1 X300 Z-40 F4000 ; 이동할 거리를 삭제하면서 측정 하강 에지 N20 IF $AC_MEA[1]==0 GOTOF MEASERR ; 측정 에러? N30 R5=$AA_MW[X] R6=$AA_MW[Z] ; 프로세스에서 값이 측정됨 .. N100 MEASERR: M0 ; 측정 에러 참고: IF 명령 – “조건부 프로그램 점프” 절 참조
8.3.13 피드 F
기능
피드 F는 경로 속도며 모든 관련 축의 속도 구성 요소의 기하학적 합계 값을 나타냅니다.
축 속도는 전체 경로의 축 경로 공유에서 결정됩니다.
피드 F는 보간 유형 G1, G2, G3, CIP 및 CT에 적용되며 새 F 워드가 기록될 때까지 유지됩
니다.
프로그래밍
F...
참고 설명: 정수 값의 경우 소수점은 필요하지 않습니다. 예: F300
G94, G95에서 G 측정 단위 F 워드의 측정 단위는 G 기능을 통해 결정됩니다.
• G94 F(mm/min 단위의 피드)
• G95 F(mm/rev 단위의 스핀들 피드) (스핀들이 회전하는 경우에만 적용됩니다!)
참고 설명: 이 측정 단위는 미터 치수에 적용됩니다. 8.2.3절 “미터 및 인치 치수 기입”에 따라 인치 치수 기입도 설정할 수 있습니다.
프로그램 예제
N10 G94 F310 ; 피드(mm/min) ... N110 S200 M3 ; 스핀들 속도 N120 G95 F15.5 ; 피드(mm/rev)
참고 설명: G94 - G95를 변경하는 경우 새 F 워드를 작성하십시오.

프로그래밍
8.3 축 이송
8-194 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
정보
G94, G95가 포함된 G 그룹에는 주속 일정 제어에 대한 기능 G96, G97도 포함되어 있습니다. 이러한 기능은 S 워드에도 영향을 미칩니다(8.5.1절 “주속 일정 제어” 참조).
8.3.14 정위치 정지/연속 경로 제어 모드: G9, G60, G64
기능
다양한 요건에 최적 상태로 적용할 수 있도록 블록 경계에서의 이송 동작을 설정하는 데 사용
되고 블록을 전진하는 데 사용되는 G 명령이 제공됩니다. 예를 들어, 축을 사용하여 신속하게 배치하거나 다중 블록 상에서 경로 형상을 가공할 수 있습니다.
프로그래밍
G60 ; 정위치 정지 – 모달 G64 ; 연속 경로 모드 G9 ; 정위치 정지 - 비모달 G601 ; 미세 정위치 정지 창 G602 ; 일반 정위치 정지 창
정위치 정지 G60, G9
정위치 정지 기능(G60 또는 G9)이 활성화된 경우 블록 끝에서의 정확한 끝 위치에 도달하기 위해 속도가 0으로 감속됩니다.
여기에서 다른 모달 G 그룹을 사용하여 이 블록의 이송가 종료된 것으로 간주되고 다음 블록
이 시작되는 시점을 설정할 수 있습니다.
• G601 미세 정위치 정지 창 모든 축이 “미세 정위치 정지 창”(머신 데이터의 값)에 도달했을 때 블록 전진이 일어납
니다.
• G602 일반 정위치 정지 창 모든 축이 “일반 정위치 정지 창”(머신 데이터의 값)에 도달했을 때 블록 전진이 일어납
니다.

프로그래밍
8.3 축 이송
8-195 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
정위치 정지 창 선택은 많은 배치 작업이 실행되는 경우 전체 시간에 중대한 영향을 미칩니다. 미세 조정에는 더 많은 시간이 소요됩니다.
그림 8-24 G60/G9에 적용된 일반 또는 미세 정위치 정지 창(확대 표시)
프로그램 예제
N5 G602 ; 일반 정위치 정지 창 N10 G0 G60 Z... ; 정위치 정지 모달 N20 X... Z... ; G60 활성 상태 유지 ... N50 G1 G601 ... ; 미세 정위치 정지 창 N80 G64 Z... ; 연속 경로 모드로 전환 ... N100 G0 G9 Z... ; 정위치 정지가 이 블록에만 적용됨 N111 ... ; 다시 연속 경로 모드
참고 설명: G9 명령은 프로그램된 블록에 대해서만 정위지 정지를 생성합니다. 하지만G60은 G64를 통해 취소될 때까지 계속 적용됩니다.
연속 경로 모드 G64
연속 경로 모드의 목적은 블록 경계에서 감속을 방지하고 (접선 전이의 경우) 가능한 일정한 경로 속도를 사용하여 다음 블록으로 전환하는 데 있습니다. 이 기능은 몇 개 블록에서 룩-어헤드
속도 제어와 함께 작동합니다.
비접선 전이(코너)의 경우, 축이 짧은 시간 동안의 상대적으로 높은 속도 변화에 적응할 수 있도록 속도가 급격하게 감속될 수 있습니다. 따라서 큰 저크(jerk: 가속 변화)을 일으킬 수 있습
니다. 저크 정도는 SOFT 기능을 활성화하여 제한할 수 있습니다.

프로그래밍
8.3 축 이송
8-196 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 예제
N10 G64 G1 Z... F... ; 연속 경로 모드 N20 X.. ; 연속 경로 모드가 계속 활성화 상태임 상태 유지 ... N180 G60 ... ; 정위치 정지로 전환
룩 어헤드 속도 제어 G64를 사용한 연속 경로 모드에서는 제어 시스템이 여러 NC 블록에 대한 속도 제어를 자동으
로 미리 결정합니다. 따라서 대략적인 접선 전이를 사용하여 여러 블록에서 가속 및 감속할 수 있습니다. NC 블록에서 여러 개의 짧은 거리 이송들로 이루어진 경로의 경우 룩 어헤드 없이
도 더 빠른 속도에 도달할 수 있습니다.
그림 8-25 블록에서 짧은 이송 경로들과 G60 및 G64 속도 동작 비교
8.3.15 가속 패턴: BRISK, SOFT
BRISK 기계 축은 최종 속도에 도달할 때까지 최대 허용 가능한 가속을 사용하여 속도를 변경합니다. BRISK을 사용하면 시간에 최적화된 작업을 수행할 수 있습니다. 짧은 시간에 설정된 속도에 도달합니다. 그러나 가속 패턴에서 점프가 있습니다.
SOFT 기계 축은 최종 속도에 도달할 때까지 비선형 상수 곡선으로 가속화됩니다. 이와 같이 가속화
에 저크가 없으므로 감소된 기계 로드에 대해 SOFT를 사용할 수 있습니다. 동일한 동작을 중단 프로시저에도 적용할 수 있습니다.

프로그래밍
8.3 축 이송
8-197 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 8-26 BRISK/SOFT를 사용할 때 경로 속도의 기본 과정
프로그래밍
BRISK ; 급작스런 경로 가속 SOFT ; 저크 제한 경로 가속화
프로그램 예제
N10 SOFT G1 X30 Z84 F6.5 ; 저크 제한 경로 가속화 ... N90 BRISK X87 Z104 ; 급작스런 경로 가속화 계속 ...
8.3.16 가속 오버라이드율: ACC
기능
일정한 프로그램 구간에서 머신 데이터를 통해 설정된 축 및 스핀들 가속도가 프로그램을 사
용하여 변경되어야 할 수도 있습니다. 이렇게 프로그램 가능한 가속도가 백분율 가속도 오버
라이드입니다.
각 축(예: X) 또는 스핀들(S)에 대해 백분율 값 > 0%이고 v 200%을 프로그램할 수 있습니다.
그리고 나면 이 비례 가속화를 통해 축 보간이 수행됩니다. 참조 값(100%)는 가속화에 사용할
수 있는 머신 데이터 값입니다(축인지 스핀들인지에 따라 달라집니다. 스핀들의 경우, 기어 스
텝과 배치 모드 또는 속도 모드인지 여부에 크게 좌우됩니다).
프로그래밍
ACC[축 이름] = 백분율 ; 축에 대해 ACC[S]= 백분율 값 ; 스핀들
프로그램 예제
N10 ACC[X]=80 ; X축에 대해 80% 가속 N20 ACC[S]=50 ; 스핀들에 대해 50% 가속 ... N100 ACC[X]=100 ; X축에 대해 오버라이드 사용 안 함

프로그래밍
8.3 축 이송
8-198 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
유효성
AUTOMATIC 및 MDA 모드의 모든 보간 유형에는 제한이 있습니다. 이 제한은 JOG 모드일 때와 원점 복귀 시 동작하지 않습니다.
값 할당 ACC[...] = 100은 프로그램의 RESET 및 End와 마찬가지로 오버라이드를 비활성화합
니다.
프로그램된 오버라이드 값은 드라이런 피드를 사용하는 경우에도 활성화됩니다.
주의
100%보다 큰 값은 기계에서 이 정도의 부하를 견딜 수 있고 드라이브에 그러한 여력이 있는
경우에만 프로그램할 수 있습니다. 제한을 따르지 못하면 기계 부품이 손상되고 에러 메시지
가 표시될 수 있습니다.
8.3.17 피드포워드 제어를 이용한 이송: FFWON, FFWOF
기능
피드포워드 제어를 사용하면 이송된 경로의 추종 오차를 0으로 줄일 수 있습니다. 피드 포워드 제어를 사용한 이송에서는 경로 정확도가 높아지므로 가공 결과도 향상됩니다.
프로그래밍
FFWON ; 피드포워드 제어 ON FFWOF ; 피드포워드 제어 OFF
프로그램 예제
N10 FFWON ; 피드포워드 제어 ON N20 G1 X... Z... F9 ... N80 FFWOF ; 피드포워드 제어 OFF

프로그래밍
8.3 축 이송
8-199 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.3.18 3번째 및 4번째 축
기능
요구 사항: 제어 시스템이 3 또는 4개 축을 사용할 수 있도록 설계되어야 합니다.
기계 설계에 따라 3번째와 4번째 축이 필요할 수도 있습니다. 이러한 축은 선형 또는 로타리
축으로 구현할 수 있습니다. 따라서, U, C 또는 A 등으로 이러한 축의 식별자를 구성할 수 있
습니다. 로타리 축의 경우 0 ... <360도의 범위 안에서 이송 각도를 구성할 수 있습니다(모듈식
동작).
적절한 기계 설계를 사용하는 경우 3번째 축과 4번째 축이 나머지 축들과 동시에 선형으로 이
송될 수 있습니다. 해당 축이 G1 또는 G2/G3을 포함하는 블록에서 나머지 축(X, Z)과 함께 이
송되는 경우 해당 축에 피드 F가 할당됩니다. 속도는 X축 및 Z축 이송에 소요되는 시간에 딸
라 달라지며 이동은 나머지 경로 축에서 시작되고 중지됩니다. 그러나 속도가 정의된 제한 값
을 초과해서는 안 됩니다.
G1의 축은 블록 내 유일한 이동 축이며 활성 피드 F를 사용하여 이동합니다.
축이 로타리 축이면 F 단위는 G94의 경우 deg/min이거나 G95의 경우 deg/rev(스핀들)입니다.
이러한 축의 경우 옵셋을 설정하고(G54 ... G59) 프로그램할 수 있습니다 (TRANS,
ATRANS).
프로그램 예제
4번째 축이 로타리 축이며 축 식별자가 A인 경우: N5 G94 ; mm/min 또는 deg/min 단위의 F N10 G0 X10 Z30 A45 ; 급 이송으로 X-Z 경로 이송, A – 동시 이송 N20 G1 X12 Z33 A60 F400 ; 400 mm/min에서 X-Z 경로 이송, A 동시 이송 N30 G1 A90 F3000 ; 축 A만 90° 위치까지 단독 이송 속도 3,000 deg/min
로타리 축에 대한 특수 명령: DC, ACP, ACN 예: 로타리 축 A의 경우: A=DC(...) ; 절대 좌표, 위치에 직접 접근 (최단 경로 사용) A=ACP(...) ; 절대 치수, 양의 방향으로 위치에 접근 A=ACN(...) ; 절대 치수, 음의 방향으로 위치에 접근 예: N10 A=ACP(55.7) ; 양의 방향으로 절대 위치 55.7도에 접근

프로그래밍
8.3 축 이송
8-200 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.3.19 드웰 시간: G4
기능
G4가 있는 별도 블록을 두 NC 블록 사이에 삽입하여 정의된 시간 동안 가공 작업을 중단할 수 있습니다. 예: 릴리프 절삭 작업. F... 또는 S... 워드는 이 블록에서 시간 정보에 대해서만 사용됩니다. 이전에 프로그램된 피드 F 또는 스핀들 속도 S는 유효한 상태로 유지됩니다.
프로그래밍
G4 F... ; 드웰 시간(s) G4 S... ; 드웰 시간(스핀들 회전 수)
프로그램 예제
N5 G1 F3.8 Z-50 S300 M3 ; 피드 F, 스핀들 속도 S N10 G4 F2.5 ; 드웰 시간 2.5 s N20 Z70 N30 G4 S30 ; 30 번의 스핀들 회전 동안 일시 중지, S=300 rev/min 및 100%에 해당함 속도 오버라이드: t=0.1 min N40 X... ; 피드와 스핀들 속도 계속 적용
참고 설명
G4 S…는 제어된 스핀들을 사용할 수 있는 경우 (S...를 통해 속도 지정이 프로그램된 경우)에만 지원됩니다.
8.3.20 고정 정지점로 이동
기능
이 기능은 SINUMERIK 802D sl plus 및 pro에서 사용할 수 있습니다.
“Travel to fixed stop(고정 정지점으로 이동)”(FXS = 고정 정지점) 기능은 클램핑 공작물에 대
해 정의된 힘(예: 슬리브와 그리퍼에 필요한 힘)을 설정하는 데 사용할 수 있습니다.
이 기능은 기계 원점 복귀에도 사용할 수 있습니다. 토크가 충분히 감소된 경우에는 프로브를
연결하지 않고 단순 측정 작업을 수행할 수도 있습니다.
프로그래밍
FXS[axis]=1 ; “Travel to fixed stop(고정 정지점으로 이동)” 선택
FXS[axis]=0 ; “Travel to fixed stop(고정 정지점으로 이동)”
FXST[axis]=... ; 드라이브 최대 토크(%)로 지정된 클램핑 토크
FXSW[axis]=... ; mm/deg 단위의 고정 정지점 모니터링을 위한 창 너비

프로그래밍
8.3 축 이송
8-201 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
참고 설명: 이상적으로 가공 축 식별자를 축 식별자로 사용해야 합니다. 예: X1. 좌표 회전이 활성화되지 않고 이 축이 기계 축에 직접 할당된 경우에는 채널 축 식별자
(예: X)만 허용됩니다.
명령은 모달식입니다. 이송 경로 및 FXS[axis]=1 기능의 선택을 하나의 블록 안에 프로그램해
야 합니다.
프로그램 예제 - 선택
N10 G1 G94 ... N100 X250 Z100 F100 FXS[Z1]=1 FXST[Z1]=12.3 FXSW[Z1]=2 ; Z1 기계 축의 경우 FXS 기능이 선택됨, ; 클램핑 토크 12.3%, ; 창 너비 2mm
참고 사항
• 선택한 경우 고정 정지점은 시작 및 끝 위치 사이에 있어야 합니다.
• 토크 FXST[ ]=과 창 너비 FXSW[ ]=에 대한 파라메타는 선택 사양입니다. 이러한 파라메타
를 지정하지 않은 경우에는 기존 셋팅 데이터(SD)의 값이 적용됩니다. 프로그램된 값을 셋팅 데이터로 가져오게 됩니다. 시작시 셋팅 데이터에 머신 데이터의 값이 로드됩니다. FXST[ ]=... 또는 FXSW[ ]=...는 프로그램 중 언제라도 변경할 수 있습니다. 블록 내 이송 전에 변경 사항이 적용됩니다.
그림 8-27 고정 정지점으로 이동의 예: 공작물에 압력을 가하는 슬리브

프로그래밍
8.3 축 이송
8-202 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
기타 프로그램 예제
N10 G1 G94 ... N20 X250 Z100 F100 FXS[X1]=1 ; X1 기계 축에 대해 선택된 FXS; SD로부터의 클램핑 토크 및 창 너비 N20 X250 Z100 F100 FXS[X1]=1 FXST[X1]=12.3 ; X1 기계 축에 대해 선택된 FXS, 클램핑 토크 12.3%, SD로부터의 창 너비 N20 X250 Z100 F100 FXS[X1]=1 FXST[X1]=12.3 FXSW[X1]=2 ; X1 기계 축에 대해 선택된 FXS, 클램핑 토크 12.3%, 창 너비 2mm N20 X250 Z100 F100 FXS[X1]=1 FXSW[X1]=2 ; X1 기계 축에 대해 선택된 FXS, SD로부터의 클램핑 토크, 창 너비 2mm
고정 정지점에 도달
고정 정지점에 도달한 경우:
• 이동할 거리가 삭제되고 위치 지령치가 처리됩니다.
• 드라이브 토크가 프로그램된 제한값 FXST[ ]=... 또는 SD의 값까지 증가되고 나서 일정하
게 유지됩니다.
• 고정 정지점 모니터링은 지정된 창 너비 안에서 동작됩니다. (FXSW[ ]=... 또는 SD의 값).
기능 선택 취소
기능 선택 취소는 전처리 중지를 트리거합니다. [X1] = 0을 사용한 블록에는 이송 동작이 포함
되어야 합니다.
예제: N200 G1 G94 X200 Y400 F200 FXS[X1] = 0 ; X1축이 고정 정지점에서 해당 위치로 후진함 X= 200mm
중요
후진 위치로의 이송은 고정 정지점으로부터 시작되어야 합니다. 그렇지 않으면 고정 정지점
이나 기계가 손상될 수 있습니다.
후진 위치에 도달된 경우에는 블록이 변경됩니다. 후진 위치를 지정하지 않은 경우에는 토크 제한이 비활성화되자 마자 블록이 즉시 변경됩니다.

프로그래밍
8.3 축 이송
8-203 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
기타 참고 사항
• “이동할 거리 삭제를 사용한 측정”(“MEAS” 명령) 및 “고정 정지점으로 이동”은 한 블록에
서 동시에 프로그램할 수 없습니다.
• “고정 정지점으로 이동”이 활성화된 동안에는 형상 모니터링이 수행되지 않습니다.
• 토크 한계가 너무 많이 감소되는 경우에는 축이 지정된 지령치를 따를 수 없습니다. 그리
고 나면 위치 컨트롤러가 토크 한계로 이동되고 형상 편차가 증가합니다. 이러한 작동 상태에서는 토크 제한 증가로 인해 갑작스런 저크(jerk) 이동이 발생할 수도 있습니다. 여전
히 축이 지정된 지령치를 따르는지 확인하십시오. 이러한 이유로, 형상 편차가 무제한 토크를 사용할 때보다 크지 않은지 확인해야 합니다.
• 토크 한계 설정에 대한 갑작스런 변화를 막기 위해 MD에 새 토크 제한의 상승 램프율을 정의할 수 있습니다 (예: 스핀들 슬리브 또는 퀼 삽입).
상태 시스템 변수: $AA_FXS[축]
이 시스템 변수는 지정된 축에 대해 “고정 정지점으로 이동” 상태를 제공합니다.
값 = 0: 축이 고정 정지점에 있지 않습니다.
1: 고정 정지점에 접근했습니다.
(고정 정지점 모니터링 창 안에 축이 있음)
2: 고정 정지점에 접근하지 못했습니다(축이 고정 정지점에 있지 않음).
3: 고정 정지점으로 이동이 활성화되었습니다.
4: 고정 정지점이 감지되었습니다.
5: 고정 정지점으로 이동이 선택 취소되었습니다. 선택 취소가 아직 완료되지
않았습니다.
가공 프로그램의 시스템 변수 쿼리로 인해 전처리 정지가 시작됩니다.
SINUMERIK 802D sl의 경우, 선택/선택 취소 전/후에는 정적 상태만 감지할 수 있습니다.
중지 알람
다음 알람이 발생하며 머신 데이터 적용이 중지될 수 있습니다:
• 20091 “고정 정지점에 도달하지 않음”
• 20094 “고정 정지점 취소됨”
참조: “기능 설명서”의 “고정 정지점으로 이동” 절

프로그래밍
8.4 스핀들 이동
8-204 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.4 스핀들 이동
8.4.1 스핀들 속도 S, 회전 방향
기능
스핀들 속도는 주소 S 아래 rpm(분당 회전수) 단위로 프로그램됩니다. 단, 기계가 제어된 스핀
들을 처리하는 것을 전제로 합니다. 회전 방향 및 이동 시작 또는 끝은 M 명령을 통해 지정됩니다(8.7절 “보조 M 기능” 참조). M3 ; CW 방향 스핀들 회전 M4 ; 스핀들 CCW 회전 M5 ; 스핀들 중지
참고 설명: 정수 S 값의 경우 S270처럼 소수점을 생략할 수 있습니다.
정보
축 이송 블록 안에 M3 또는 M4를 기록하는 경우 실제 축 이동 이전에 M 명령이 활성화됩니다. 기본값 설정: 축 이송은 스핀들이 스핀들이 지정된 속도(M3, M4)로 가속된 후에만 시작됩니다. M5 또한 축 이송 이전에 실행됩니다. 그러나 스핀들이 중지될 때까지 기다리지는 않습니다. 스핀들이 중지되기 전에 축 이송이 시작됩니다. 스핀들은 프로그램 종료 또는 RESET을 사용하여 중지됩니다. 프로그램이 시작되면 스핀들 속도 0 (S0)이 적용됩니다. 주석: 기타 설정은 머신 데이터를 통해 구성할 수 있습니다.
프로그램 예제
N10 G1 X70 Z20 F3 S270 M3 ; X축 이송 전에 Z에서 스핀들이 램프업됨 ; 시계 방향으로 270 rev/min ... N80 S450 ... ; 스핀들 변경 ... N170 G0 Z180 M5 ; Z 이송, 스핀들 중지
8.4.2 스핀들 속도 제한: G25, G26
기능
프로그램에서 G25 또는 G26과 속도 제한값으로 스핀들 주소 S를 작성하여 적용될 제한값을 제한할 수 있습니다. 이렇게 하면 동시에 셋팅 데이터에 입력되는 값을 덮어쓰게 됩니다. G25와 G26 각각 별도 블록이 필요합니다. 이전에 프로그램된 속도 S가 유지됩니다.

프로그래밍
8.4 스핀들 이동
8-205 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그래밍
G25 S... ; 프로그램 가능한 스핀들 속도 하한 G26 S... ; 속도 상한
정보
머신 데이터에 의해 스핀들 속도의 최고 제한이 설정됩니다. 화면 조작반을 통해 적절히 입력
하여 추가 제한을 위한 다양한 설정 데이터를 작동할 수 있습니다. LIMS(추가 상한값)은 G96 주속 일정 제어 기능에 대해 프로그램/입력할 수 있습니다.
프로그램 예제
N10 G25 S12 ; 스핀들 속도 하한: 12 rev/min N20 G26 S700 ; 스핀들 속도 상한 : 700 rev/min
8.4.3 스핀들 위치 지정: SPOS
기능
요구 사항: 기술적으로 스핀들은 위치 제어용으로 설계되어야 합니다.
SPOS= 기능을 사용하면 특정 각도 위치에 스핀들을 배치할 수 있습니다. 스핀들은 위치 제어
를 통해 해당 위치에서 유지됩니다.
위치 지정 절차에서 속도는 머신 데이터에서 정의됩니다.
M3/M4 이동에서 SPOS=값을 사용하면 위치 지정이 끝날 때까지 각 회전 방향이 유지됩니다. 정지 상태에서 위치를 지정할 때 최단 경로를 통해 위치에 접근하게 됩니다. 방향은 각 시작 위치와 끝 위치에서 시작됩니다.
예외: 스핀들의 최초 이동, 즉 측정 시스템이 아직 동기화되지 않았습니다. 이 경우, 해당 방향
은 머신 데이터에 의해 지정됩니다.
스핀들의 기타 이동은 로타리 축의 경우처럼(“3번째 및 4번째 축” 절 참조) SPOS=ACP(...), SPOS=ACN(...), ...를 사용하여 지정할 수 있습니다.
이동은 동일한 블록에 있는 축 이동과 동시에 수행됩니다. 두 이동이 완료되면 블록이 종료됩니다.
프로그래밍
SPOS=... ; 절대 위치: 0 ... <360도
SPOS=ACP(...) ; 절대 치수 입력, 양의 방향으로 위치에 접근
SPOS=ACN(...) ; 절대 치수 입력, 음의 방향으로 위치에 접근
SPOS=IC(...) ; 증분 치수, 선행 부호가 이송 방향 결정
SPOS=DC(...) ; 절대 치수, 위치에 직접 접근(최단 경로 사용)

프로그래밍
8.4 스핀들 이동
8-206 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 예제
N10 SPOS=14.3 ; 스핀들 위치 14.3도 ... N80 G0 X89 Z300 SPOS=25.6 ; 축 이동을 이용한 스핀들 위치 지정 이 블록은 모든 이동을 수행한 후에만 완성됩니다. N81 X200 Z300 ; N80의 스핀들 위치에 도달하는 경우에만 N81 블록이 시작됩니다.
8.4.4 기어단
기능
속도/토크 변화에 맞춰 하나의 스핀들에 대해 최대 5단 기어를 구성할 수 있습니다. 기어단의 선택은 프로그램에서 M 명령을 통해 이루어집니다. (8.7절 “기타 M 기능” 참조)
• M40 ; 자동 기어단 선택
• M41 ~ M45 ; 1 ~ 5단 기어
8.4.5 2번째 스핀들
기능
SINUMERIK 802D sl plus와 802D sl pro에서는 2번째 스핀들을 사용할 수 있습니다.
이러한 컨트롤을 사용하면 선삭 가공 기계에서의 밀링 작업에 운동학적 변환 기능
TRANSMIT 및 TRACYL도 사용할 수 있습니다. 이러한 기능는 구동 밀링 공구용 두 번째 스핀
들이 필요합니다. 이러한 기능을 사용하는 경우 주 스핀들이 로타리 축으로 작용합니다.
(8.14절 참조)
마스터 스핀들
마스터 스핀들과 관련된 일련의 기능이 있는데, 이러한 기능은 단독으로 사용할 수 없고 마스
터 스핀들이 있어야만 사용할 수 있습니다.
• G95 ; 회전 피드
• G96, G97 ; 일정한 절삭 속도
• LIMS ; G96, G97의 속도 상한
• G33, G34, G35, G331, G332 ; 나사 절삭, 나사 보간
• M3, M4, M5, S... ; 간단하게 회전 방향 지정, 정지 및 속도

프로그래밍
8.4 스핀들 이동
8-207 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
마스터 스핀들은 구성 (머신 데이터)을 통해 정의됩니다. 일반적으로 주 스핀들은 마스터 스핀들(스핀들 1)입니다. 프로그램에서 다른 스핀들을 마스터 스핀들로 정의할 수 있습니다.
• SETMS(n) ; 스핀들 n(= 1 또는 2)은 현재 마스터 스핀들입니다.
다음 기능을 통해 이전 마스터 스핀들로 전환할 수도 있습니다.
• SETMS ; 이제 구성된 마스터 스핀들이 마스터 스핀들이 됩니다.
• SETMS (1) ; 이제 스핀들 1이 이제 다시 마스터 스핀들이 됩니다.
프로그램에서 변경된 마스터 스핀들의 정의는 프로그램이 종료/중단될 때까지만 유효합니다. 그리고 나면, 구성된 마스터 스핀들이 다시 활성화됩니다.
스핀들 번호를 통해 프로그래밍
스핀들 번호를 통해 일부 스핀들 기능도 선택할 수 있습니다.
• S1=..., S2=... ; 스핀들 속도(스핀들 1 또는 2)
• M1=3, M1=4, M1=5 ; 회전 방향 지정, 스핀들 1 정지
• M2=3, M2=4, M2=5 ; 회전 방향 지정, 스핀들 2 정지
• M1=40, ..., M1=45 ; 스핀들 1의 기어단(제공된 경우)
• M2=40, ..., M2=45 ; 스핀들 2의 기어단(제공된 경우)
• SPOS [n] ; 스핀들 n 위치 지정
• SPI(n) ; 스핀들 번호 n을 축 식별자로 변환. 예: “SP1” 또는 “CC” ; n은 유효한 스핀들 번호(1 또는 2)이어야 합니다. ; 스핀들 식별자 SPI(n) 및 Sn은 동일한 기능입니다.
• $P_S[ n ] ; 마지막으로 프로그램된 스핀들 n 속도
• $AA_S[n] ; 스핀들 n의 실제 속도
• $P_SDIR[ n ] ; 마지막으로 프로그램된 스핀들 n 회전 방향
• $AC_SDIR[ n ] ; 스핀들 n의 현재 회전 방향
스핀들이 2개 설치된 경우
다음은 시스템 변수를 통해 프로그램에서 조회할 수 있습니다.
• $P_NUM_SPINDLES ; 구성된 스핀들 개수(채널에서)
• $P_MSNUM ; 프로그램된 마스터 스핀들 번호
• $AC_MSNUM ; 활성 마스터 스핀들 번호

프로그래밍
8.5 특수 회전 기능
8-208 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.5 특수 회전 기능
8.5.1 주속 일정 제어: G96, G97
기능
요구 사항: 제어된 스핀들이 있어야 합니다.
활성화된 G96 기능을 사용하면 프로그램된 절삭율 S가 공구 에지에서 일정하게 유지되는 형태로 스핀들 속도가 현재 가공된 공작물 직경 (이송 축)에 맞춰집니다. 스핀들 속도 x 직경 = 상수
S 워드는 G96을 사용하는 블록에서처럼 절삭율로 평가됩니다. G96은 그룹(G94, G95, G97)의 다른 G 기능에 의해 취소될 때까지 모달식 효과를 나타냅니다.
프로그래밍
G96 S... LIMS=... F... ; 주속 일정 제어 ON G97 ; 주속 일정 제어 OFF S ; 절삭율, 단위 m/min LIMS= ; G96, G97에서의 스핀들 상한 속도 적용 F ; 피드(mm/revolution) – G95에서와 같음 설명: G95 대신에 G94가 이전에 활성화된 경우 해당 F 값을 프로그램해야 합니다!
S
그림 8-28 주속 일정 제어 G96
급 이송
급이송 G0을 사용하는 경우 속도 변화가 없습니다.
예외: 급 이송으로 형상에 접근하고 다음 블록에 보간 유형 G1, G2, G2, G3, CIP 또는 CT (형상 블록)가 포함되는 경우 형상 블록의 속도가 G0을 사용하는 접근 블록에 이미 적용되어 있습니다.
프로그래밍
8.5 특수 회전 기능
8-209 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
속도 상한 LIMS= 큰 직경을 작은 직경으로 맞추는 동안 스핀들 속도가 크게 증가할 수 있습니다. 이 경우, 스핀
들 속도 상한 LIMS=...를 사용하는 것이 좋습니다. LIMS가 G96 및 G97에 대해서만 작동합니다. LIMS=...가 프로그램된 경우 셋팅 데이터(SD 43230: SPIND_MAX_VELO_LIMS)에 입력된 값을 덮어쓰게 됩니다. 이 SD는 LIMS가 작성되지 않은 경우에 작동합니다. G26으로 프로그램되거나 머신 데이터를 통해 지정된 속도 상한은 LIMS=를 초과할 수 없습
니다.
주속 일정 제어 해제: G97 “주속 일정제어” 기능은 G97을 통해 비활성화됩니다. G97이 적용되면 작성된 S 워드(분당 회전 수)가 스핀들 속도로 다시 평가됩니다. 새 S 워드를 작성하지 않은 경우에는 활성 G96 기능에 대해 마지막으로 측정된 속도에서 스핀들이 계속 회전합니다.
프로그램 예제
N10 ... M3 ; 스핀들 회전 방향 N20 G96 S120 LIMS=2500 ; 주속 일정 제어 활성화, 120 m/min, 제한 속도 2500 rev/min N30 G0 X150 ; G0을 사용하는 N31 블록으로 인해 속도에 변화가 없습니다. N31 X50 Z... ; G0을 사용하는 N32 블록으로 인해 속도에 변화가 없습니다. N32 X40 ; 형상에 접근, 새로운 속도는 블록 N40 시작에 필요할 경우 자동으로 조정됩니다. N40 G1 F0.2 X32 Z... ; 피드 0.2 mm/rev ... N180 G97 X... Z... ; 주속 일정 제어 비활성화 N190 S... ; 스핀들 속도(rev/min)
정보
G96 기능은 G94 또는 G95(동일한 G 그룹)를 사용하여 해제할 수도 있습니다. 이 경우, 마지
막으로 프로그램된 스핀들 속도 S는 새 S 워드가 프로그램되지 않은 경우 나머지 가공 순서에
대해 활성화됩니다.
프로그램 가능한 옵셋 TRANS 또는 ATRANS(해당 제목의 절 참조)는 이송 축 X에 사용할 수
없거나 낮은 값만 사용해야 합니다. 공작물 영점(0)은 선반에 있어야 합니다. 그래야만 G96
기능이 정확하게 동작할 수 있습니다.

프로그래밍
8.5 특수 회전 기능
8-210 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.5.2 라운딩, 모따기
기능
모따기(CHF 또는 CHR) 또는 라운딩(RND) 요소를 형상 코너에 삽입할 수 있습니다. 동일한 방법으로 몇 개의 형상 코너를 라운딩하려면 “모달 라운딩”(RNDM)을 사용하십시오. FRC(비 모달) 또는 FRCM(모달)을 사용하면 모따기/라운딩 이송율을 프로그램할 수 있습니
다. FRC/FRCM이 프로그램되지 않은 경우에는 일반 피드 F가 적용됩니다.
프로그래밍
CHF=... ; 모따기 삽입, 값: 모따기 길이 CHR=... ; 모따기 삽입, 값: 모따기 측면 길이 RND=... ; 라운딩 삽입, 값: 모따기 반경 RNDM=... ; 모달 라운딩: 값 > 0: 모따기 반경, 모달 라운딩ON 현재 라운딩이 모든 형상 코너에 삽입됩니다. 값 = 0: 모달 라운딩 OFF... FRC=... ; 모따기/라운딩에 사용되는 비모달식 피드 값 > 0, 피드 mm/min 단위(G94) 또는 mm/rev 단위(G95) FRCM=... ; 모따기/라운딩에 사용되는 비모달식 피드 값 > 0: 피드: mm/min (G94) 또는 mm/rev (G95), 모따기/라운딩의 모달 피드 값 = 0: 모따기/라운딩에 대한 모달식 피드 OFF 피드 F가 모따기/라운딩에 적용됩니다.
정보
해당 명령 CHF= ... 또는 CHR=... 또는 RND=... 또는 RNDM=...가 코너 방향으로의 축 이동을 통해 블록에 기록됩니다.
포함된 블록의 형상 길이가 부족할 경우 모따기 및 라운딩의 프로그램된 값이 자동으로 감소
됩니다. 다음의 경우에는 모따기/라운딩이 삽입되지 않습니다.
• 평면 이송을 위한 정보가 포함되지 않은 세 개 이상의 블록이 연결 안에 프로그램되는 경우
• 평면이 변경되는 경우
G0을 사용하여 모따기를 이송하지 않을 경우 F, FRC,FRCM이 활성화되지 않습니다.
모따기/라운딩 피드 F가 활성화되는 경우 기본적으로 코너에서 먼 블록의 값이 사용됩니다. 기타 설정은 머신 데이터를 통해 구성할 수 있습니다.

프로그래밍
8.5 특수 회전 기능
8-211 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
모따기 CHF 또는 CHR
선형 형상 요소가 임의로 조합된 선형 및 원형 형상 사이에 삽입됩니다. 에지가 끊깁니다.
그림 8-29 CHF를 사용하여 모따기 삽입(예: 두 개 직선 사이)
그림 8-30 CHR을 사용하여 모따기 삽입(예: 두 개 직선 사이)
모따기 프로그램 예
N5 F...
N10 G1 X... CHF=5 ; 길이가 5mm인 모따기 삽입
N20 X... Z...
...
N100 G1 X... CHF=2 ; 측면 길이가 2 mm인 모따기 삽입
N110 X... Z...
...
N200 G1 FRC=200 X... CHR=4 ; 피드 FRC를 사용하여 모따기 삽입
N210 X... Z...

프로그래밍
8.5 특수 회전 기능
8-212 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
라운딩 RND 또는 RNDM 접선 연결을 사용하여 원 형상 요소를 임의로 조합된 선형 및 원형 형상 사이에 삽입할 수 있습
니다.
그림 8-31 라운딩을 예로 삽입
라운딩 프로그램 예제
N5 F... N10 G1 X... RND=4 ; 반경 4 mm, 피드 F의 1 라운딩 삽입 N20 X... Z... ... N50 G1 X... FRCM= ... RNDM=2.5 ; 모달 라운딩, 반경 2.5mm ; 특수 피드 FRCM(모달) N60 G3 X... Z... ; 또한, 이 라운딩을 N70에 삽입 N70 G1 X... Z... RNDM=0 ; 모달 라운딩 OFF ...

프로그래밍
8.5 특수 회전 기능
8-213 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.5.3 형상 정의 프로그래밍
기능
가공 도면에서 형상의 직접 끝점 값을 볼 수 없는 경우 직선 측정을 위해 각도 값도 사용할 수 있습니다. 형상 코너에서 성분 모따기 또는 라운딩을 삽입할 수 있습니다. 각 명령 CHR= ... 또는 RND=...가 블록에 기록되어 코너가 됩니다. G0 또는 G1을 통해 블록에서 청사진 프로그래밍을 사용할 수 있습니다. 이론적으로는 임의 개수의 직선 블록을 연결하고 라운딩 또는 모따기를 블록 사이에 삽입할 수 있습니다. 각 직선은 점 값 및/또는 각도 값을 통해 명확하게 식별되어야 합니다.
프로그래밍
ANG=... ; 직선 정의를 위한 각도 지정 RND=... ; 라운딩 삽입, 값: 모따기 반경 CHR=... ; 모따기 삽입, 값: 모따기 측면 길이
정보
반경과 모따기가 하나의 블록에 프로그램되는 경우 프로그래밍 순서와 상관 없이 반경이 삽입됩니다.
각도 ANG=
직선에 대해 평면에서 하나의 끝점 좌표만 알려져 있거나 여러 블록에서의 형상에 대해 누적
끝점만 알려진 경우, 직선 경로의 고유 정의에 각도 파라메타를 사용할 수 있습니다. 각도는
항상 Z 축으로 참조됩니다(일반적인 경우: G18이 활성화됨). 양의 각도가 시계 반대 방향으로
맞춰집니다.
그림 8-32 직선 측정을 위한 각도 값

프로그래밍
8.5 특수 회전 기능
8-214 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 8-33 다중 블록 형상의 예

프로그래밍
8.6 공구와 공구 보정
8-215 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.6 공구와 공구 보정
기능
공작물 가공을 위한 프로그램 작성 중에는 공구 길이 또는 절삭 반경을 고려하지 않아도 됩니
다. 도면에 지정된 것처럼 공작물 치수를 직접 프로그램할 수 있습니다.
특수 데이터 구간에서 공구 데이터를 별도로 입력할 수 있습니다. 이 프로그램에서는 필요한 공구와 보정 데이터만 호출할 수 있습니다. 시스템에서 이 데이터
에 기초하여 필요한 경로 보정을 수행하여 설명된 공작물을 생성합니다.
그림 8-34 서로 다른 공구 치수를 사용하여 공작물 가공
8.6.1 공구 T
기능
공구 선택은 T 워드를 프로그램할 때 수행됩니다. 이 선택이 공구를 변경하는 것인지 공구 사전
선택 인지 여부는 머신 데이터에 정의됩니다.
• 공구 변경 (공구 기능)은 T 워드를 사용하여 직접 수행됩니다(예를 들면, 선삭 가공 기계의
공구 터렛의 경우 일반적임). 또는
• 또는 추가 명령 M6을 사용하여 T 워드로 미리 선택된 후 수행됩니다 (8.7절 "기타 M 기능"
참조).
참고: 특정 공구가 활성화된 경우 프로그램이 끝난 후와 제어 시스템을 켜거나 끈 후에도 활성 공구
로 계속 저장되어 있습니다.
공구를 수동으로 변경하는 경우 제어 시스템에서 올바른 공구를 “인식하도록” 제어 시스템에
도 변경 사항을 입력합니다. 예를 들면, MDA 모드에서 새로운 T 워드로 블록을 시작할 수 있
습니다.
프로그래밍
T... ; 공구 번호: 1 ... 32 000

프로그래밍
8.6 공구와 공구 보정
8-216 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
참고
다음은 시스템에 동시에 저장할 수 있는 최대 공구 수입니다.
• SINUMERIK 802D sl value: 32개 공구
• SINUMERIK 802D sl plus: 64개 공구
• SINUMERIK 802D sl pro: 128개 공구
프로그램 예제
M6을 사용하지 않고 공구 변경: N10 T1 ; 공구 1 ... N70 T588 ; 공구 588
8.6.2 공구 보정 번호 D
기능
다양한 공구 보정 블록 (다수의 절삭날에 대해)을 사용하여 1 ~ 9(12)개 데이터 필드를 특정 공구에 할당할 수 있습니다. 특수 절삭 공구가 필요하면 D와 해당 번호로 프로그램할 수 있습
니다. D 워드가 작성되지 않은 경우에는 D1이 자동으로 적용됩니다. D0이 프로그램된 경우 공구 보정이 적용되지 않습니다.
프로그래밍
D... ; 공구 보정 번호: 1 ... 9, D0: 활성화된 보정이 없습니다!
참고
공구 보정 블록에 대한 다음의 최대값을 제어 시스템에 동시에 저장할 수 있습니다.
• SINUMERIK 802D sl value: 32개 데이터 필드(D 번호)
• SINUMERIK 802D sl plus: 64개 데이터 필드(D 번호)
• SINUMERIK 802D sl pro: 128개 데이터 필드(D 번호)
그림 8-35 공구 보정 번호/공구 할당 예

프로그래밍
8.6 공구와 공구 보정
8-217 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
정보
공구가 동작되면 즉시 공구 길이 보정이 적용됩니다. 프로그램된 D 번호가 없을 경우
D1 값이 사용됩니다.
각 길이 보정 축의 프로그램된 첫 번째 이송과 함께 보정이 적용됩니다.
공구 반경 보정도 G41/G42를 통해 활성화되어야 합니다.
프로그램 예제
공구 변경:
N10 T1 ; 공구 1은 관련 D1에서 활성화됩니다. N11 G0 X... Z... ; 여기에서 길이 보정이 수행되었습니다. N50 T4 D2 ; 공구 4 로드, T4의 D2가 활성화됩니다 ... N70 G0 Z... D1 ; 공구 4에 대해 D1 활성화, 절삭날만 변경됩니다.
보정 메모리의 내용
• 형상 치수: 길이, 반경. 형상, 마모도 등의 몇 가지 요소로 구성됩니다. 시스템에서 이러한 구성 요소의 특정 치수
를 계산합니다(예, 전체 길이 1, 총 반경). 각 전체 치수는 보정 메모리가 활성화될 때 유효
화됩니다. 이러한 값이 축에서 계산되는 방법은 공구 종류와 G17, G18, G19 명령을 통해 결정됩니
다(다음 그림 참조).
• 공구 유형 (드릴, 선반용 공구 또는 밀링 커터)은 필요한 형상 데이터와 계산 방법을 결정합니다.
• 공구 점 방향 “선반용 공구” 공구 유형의 경우 공구 점 방향도 입력해야 합니다.
다음 그림은 개별 공구 유형의 필요한 공구 파라메타에 대한 정보를 제공합니다.
그림 8-36 선반용 공구의 길이 보정 값

프로그래밍
8.6 공구와 공구 보정
8-218 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 8-37 두 개의 절삭날 D1과 D2를 사용하는 선반용 공구 - 길이 보정

프로그래밍
8.6 공구와 공구 보정
8-219 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 8-38 공구 반경 보정을 사용하여 선반용 공구 보정
그림 8-39 드릴 보정 결과

프로그래밍
8.6 공구와 공구 보정
8-220 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
중심 구멍
중심 구멍을 적용하려면 G18로 전환하십시오. 이렇게 하면 길이 보정이 Z 축에서 드릴에 적
용됩니다. 드릴링 후에는 G18을 통해 선반용 공구의 일반 보정이 다시 적용됩니다.
예제: N10 T... ; 드릴
N20 G17 G1 F... Z... ; 길이 보정이 Z축에서 작동합니다.
N30 Z...
N40 G18 .... ; 드릴링 완료
그림 8-40 중간 구멍 적용
8.6.3 공구 반경 보정 선택: G41, G42
기능
해당 D 번호가 있는 공구를 활성화해야 합니다. 공구 반경 보정(절삭날 반경 보정)이 G41/G42
에 의해 활성화됩니다. 시스템이 각 공구 반경에 대해 프로그램된 형상에 필요한 등거리 공구
경로를 자동으로 계산합니다.
G18이 활성화되어야 합니다.
그림 8-41 공구 반경 보정 (커터 반경 보정)

프로그래밍
8.6 공구와 공구 보정
8-221 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그래밍
G41 X... Z... ; 형상 좌측 공구 반경 보정 G42 X... Z... ; 형상 우측 공구 반경 보정
참고 설명: 선형 보간에 대해서만 선택할 수 있습니다(G0, G1). 양축을 프로그래밍하십시오. 하나의 축만을 지정하는 경우 두 번째 축이 마지막으로 프로그
램된 값으로 자동 완료됩니다.
그림 8-42 형상의 우측/좌측 보정
보정 시작
공구가 형상에 대해 직선으로 이동하고 형상의 시작점에 접하는 경로에 수직으로 놓여집니다.
충돌이 없이 이동할 수 있는 시작점을 선택합니다.
그림 8-43 G42, 공구 점 방향=3을 사용하는 공구 반경 보정의 예
정보
일반적으로, 공작물 형상이 포함된 블록이 G41/G42가 포함된 블록을 따릅니다. 그러나, 형상 경로에 대한 정보를 포함하지 않은 방해 블록으로 인해 형상 작도가 중단될 수 있습니다.

프로그래밍
8.6 공구와 공구 보정
8-222 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 예제
N10 T... F... N15 X... Z... ; P0 시작점 N20 G1 G42 X... Z... ; 형상 우측 선택, P1 N30 X... Z... ; 시작 형상, 원호 또는 직선
8.6.4 형상 동작: G450, G451
기능
G450 및 G451 기능을 사용하여 하나의 형상 성분에서 다른 하나의 형상 성분으로 비 연속 전이 동작을 설정할 수 있습니다. 내부 및 외경 코너는 제어 시스템에서 자체적으로 감지됩니다. 내경 코너의 경우 등거리 경로
의 교차점에 항상 접근합니다.
프로그래밍
G450 ; 전이 원 G451 ; 교차점
그림 8-44 외경 코너에서의 코너 동작
그림 8-45 내경 코너에서의 코너 동작
전이 원 G450 공구 중심점이 공구 반경이 포함된 호의 공작물 외경 코너 주변을 이동합니다. 데이터 측면, 가령 피드 값을 고려할 때, 전이 원호는 이송 동작이 포함되는 다음 블록에 속합니다.

프로그래밍
8.6 공구와 공구 보정
8-223 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
교차점 G451 등거리 경로의 G451 교차시, 공구의 중심점 경로에서 얻어지는 점(교차점)에 접근합니다.
8.6.5 공구 반경 보정 OFF: G40
기능
보정 모드(G41/G42)는 G40을 통해 선택이 취소됩니다. G40은 프로그램 시작 부분에서의 활성화 위치이기도 합니다. 공구는 후진 각도와 상관 없이 수직 위치(끝점에서 접선에 수직인 보정 벡터)에서 G40 앞의 블
록을 끝냅니다. G40이 활성 상태이면 기준점이 공구 팁이 됩니다. 그리고 나면 공구 팁이 선택 취소시 프로그
램된 지점으로 이동합니다.
충돌 없이 이송되도록 항상 G40 블록의 끝점을 선택하십시오.
프로그래밍
G40 X... Z... ; 공구 반경 보정 OFF
참고 설명: 보정 모드는 선형 보간에 대해서만 선택할 수 있습니다(G0, G1).
양축을 프로그래밍하십시오. 하나의 축만을 지정하는 경우 두 번째 축이 마지막으로 프로그
램된 값으로 자동 완료됩니다.
그림 8-46 G40에서 공구 반경 보정이 끝납니다. G42 예, 절삭날 위치 =3 사용
프로그램 예제
... N100 X... Z... ; 형상의 마지막 블록, 원 또는 직선, P1 N110 G40 G1 X... Z.. ; 공구 반경 보정 비활성화, P2

프로그래밍
8.6 공구와 공구 보정
8-224 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.6.6 공구 반경 보정의 특수한 경우
보정 방향 변경
G40을 작성하지 않고도 보정 방향 G41 <–> G42를 변경할 수 있습니다. 이전 보정 방향을 사용하는 마지막 블록은 끝점에서 보정 벡터의 일반 위치로 끝납니다. 새 보정 방향은 보정 시작 (시작점의 기본 설정)으로 실행됩니다.
G41, G41 또는 G42, G42의 반복 동일한 보정(예: G40 - G41)이 이 명령들 사이에 G40을 작성하지 않고 하나 이상을 프로그램
할 수 있습니다. 새 보정 호출 앞에 있는 마지막 블록은 끝점에서 보정 벡터의 일반 위치로 끝납니다. 새 보정
은 보정 시작으로 수행됩니다 (보정 방향 변경에 대해 설명된 동작).
옵셋 번호 D 변경
보정 번호 D는 보정 모드에서 변경할 수 있습니다. 수정된 공구 반경은 새 D 번호가 프로그램
되는 블록에서 활성화됩니다. 블록 끝에서만 수정이 완료됩니다. 다시 말하면, 수정은 원현 보간의 경우에도 전체 블록에서 연속으로 이송됩니다.
M2에 의한 보정 취소
G40 명령을 작성하지 않고도 M2 (프로그램 끝)를 통해 보정 모드가 취소되는 경우 좌표가 속한 마지막 블록이 보정 벡터의 정상 위치에서 끝납니다. 보정 이동이 실행되지 않습니다. 이 프로그램은 이 공구 위치로 끝납니다.
주의해야 할 가공 경우
프로그램을 작성할 때 형상 이동 길이가 공구 반경보다 작으면 각별히 주의하십시오.
이와 같은 경우는 가급적 피해야 합니다.
또한 여러 블록에서 형상에 “병목 지점”이 없는지 확인하십시오.
테스트/드라이런을 수행하는 경우 제공되는 최대 공구 반경을 사용하십시오.
뾰족한 형상 각도
G451 교차가 활성화된 외형에서 매우 뾰족한 외경 코너(≤ 10°) 가 발생하는 경우 제어 시스
템이 전이 원으로 자동 전환합니다. 따라서 긴 드라이런을 방지할 수 있습니다.

프로그래밍
8.6 공구와 공구 보정
8-225 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.6.7 공구 반경 보정 예
그림 8-47 공구 반경 보정, 확대 표시된 절삭날 반경의 예
프로그램 예제
N1 ; 형상 절삭
N2 T1 ; 공구 1에 보정 D1 적용
N10 DIAMON F... S... M... ; 반경 치수 기입, 기술 값
N15 G54 G0 G90 X100 Z15
N20 X0 Z6
N30 G1 G42 G451 X0 Z0 ; 보정 모드 시작
N40 G91 X20 CHF=(5* 1.1223) ; 모따기 삽입, 30도
N50 Z-25
N60 X10 Z-30
N70 Z-8
N80 G3 X20 Z-20 CR=20
N90 G1 Z-20
N95 X5
N100 Z-25
N110 G40 G0 G90 X100 ; 보정 모드 종료
N120 M2
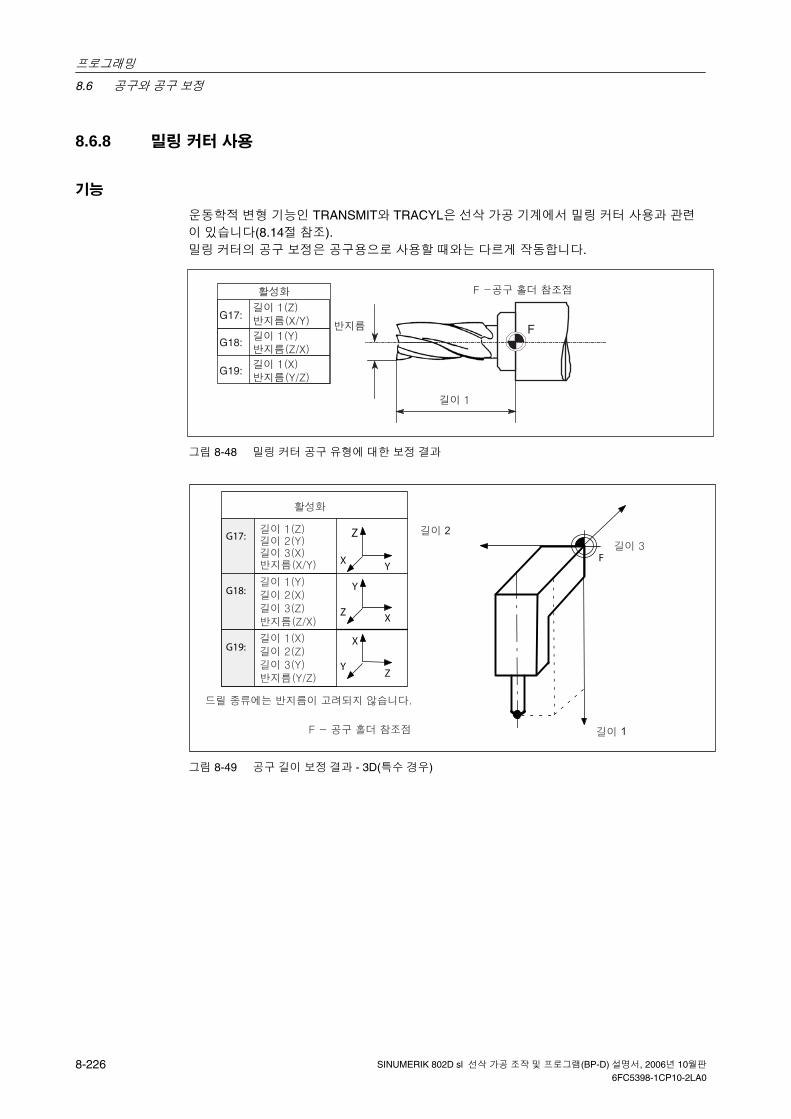
프로그래밍
8.6 공구와 공구 보정
8-226 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.6.8 밀링 커터 사용
기능
운동학적 변형 기능인 TRANSMIT와 TRACYL은 선삭 가공 기계에서 밀링 커터 사용과 관련
이 있습니다(8.14절 참조). 밀링 커터의 공구 보정은 공구용으로 사용할 때와는 다르게 작동합니다.
그림 8-48 밀링 커터 공구 유형에 대한 보정 결과
그림 8-49 공구 길이 보정 결과 - 3D(특수 경우)

프로그래밍
8.6 공구와 공구 보정
8-227 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
밀링 커터 반경 보정 G41, G42
그림 8-50 형상의 우측/좌측에 대한 밀링 커터 반경 보정
보정 시작
공구가 형상에 대해 직선으로 이동하고 형상의 시작점에 접하는 경로에 수직으로 놓여집니다. 충돌이 없이 이동할 수 있는 시작점을 선택합니다.
그림 8-51 G42를 사용한 커터 반경 보정 시작 예
정보
그렇지 않으면 커터 반경 보정이 선반 공구에 대한 반경 보정으로 작동합니다(8.6.4 ~ 8.6.6절 참조). 자세한 내용은 다음을 참조하십시오.
참조: “조작 및 프로그램 설명서 – 밀링” SINUMERIK 802D

프로그래밍
8.6 공구와 공구 보정
8-228 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.6.9 공구 보정의 특수 처리
SINUMERIK 802Dsl plus 및 802Dsl pro에서는 다음의 특수 작업을 공구 보정에 사용할 수 있습니다.
셋팅 데이터의 영향
조작자/프로그래머는 다음의 셋팅 데이터를 사용하여 사용된 공구의 길이 보정 계산에 적용할
수 있습니다.
• SD 42940: TOOL_LENGTH_CONST (형상 축에 공구 길이 구성 요소 할당)
• SD 42950: TOOL_LENGTH_TYPE (유형과 상관 없이 공구 길이 구성 요소 할당)
참고: 수정된 셋팅 데이터는 다음 절삭날 선택으로 적용됩니다.
예제
사용: SD 42950: TOOL_LENGTH_TYPE =2 사용되는 밀링 공구는 선반 공구와 마찬가지로 길이 보정 시 고려됩니다.
• G17: 길이 1(Y 축), 길이 2(X 축)
• G18: 길이 1(X 축), 길이 2(Z 축)
• G19: 길이 1(Z 축), 길이 2(Y 축)
사용: SD 42940: TOOL_LENGTH_CONST =18 G18의 경우처럼 모든 평면 G17 ~ G19에서 길이 할당이 수행됩니다.
• 길이 1(X 축), 길이 2(Z 축)
프로그램의 셋팅 데이터
셋팅 데이터를 조작자 입력을 통해 설정하는 것 외에도, 프로그램 안에 작성할 수도 있습니다.
예제: N10 $MC_TOOL_LENGTH_TYPE=2 N20 $MC_TOOL_LENGTH_CONST=18
정보
공구 보정 특수 처리에 대한 자세한 내용은 다음을 참조하십시오.
참조: 기능 설명, “공구 보정에 대한 특수 처리” 절

프로그래밍
8.7 기타 기능(M)
8-229 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.7 기타 기능(M)
기능
특수 M 기능은 “절삭유 ON/OFF”와 기계에 대한 기타 작업 등 전환 작업을 시작합니다.
CNC 제조업체에서 이미 다양한 M 기능에 수정된 기능을 할당했습니다. 수정된 기능이 아직
할당되지 않은 기능은 제조업체가 자유롭게 사용할 수 있도록 예약됩니다.
참고: 시스템에서 사용 또는 예약된 보조 M 기능에 대한 간단한 설명은 8.1.6절 “명령 개요”를 참조
하십시오.
프로그래밍
M... ; 블록당 최대 5개 M 기능
활성화
축 이동을 사용하는 블록에서 활성화: 축 이송을 사용하는 블록에 M0, M1, M2 기능이 포함되는 경우 이러한 M 기능들은 축 이송 후
에 적용됩니다.
M3, M4, M5 기능은 이송 전에 내부 인터페이스(PLC)로 출력됩니다. M3, M4에 대해서는 제어
된 스핀들이 지령치에 도달되고 나면 축 이동이 시작됩니다. 그러나, M5의 경우, 스핀들 정지 상태를 기다리지 않습니다. 스핀들이 중지되기 전에 축 이동이 시작됩니다 (기본 설정).
나머지 M 기능들은 이송 도중에 PLC로 출력됩니다.
축 이동 바로 전/후에 M 기능을 프로그램하려면, 동일 블록에 M 기능을 프로그램 하지 말고 블록을 분리하여 프로그램 하십시오. 주의 사항: 이 블록은 G64 연속 경로 모드를 중단하고 정위치 정지점을 생성합니다.
프로그램 예제
N10 S... N20 X... M3 ; 축 이동이 포함된 블록 내 M 기능 X축 이동 전에 스핀들이 가속화됨 N180 M78 M67 M10 M12 M37 ; 블록당 최대 5개 M 기능
참고
M과 H 기능 외에도, T, D 및 S 기능은 PLC로 전달될 수도 있습니다. 하나의 블록에서 최대 10개의 모든 기능 출력을 사용할 수 있습니다.

프로그래밍
8.8 H 기능
8-230 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
정보
SINUMERIK 802D sl plus 및 802Dsl pro에서는 두 개의 스핀들을 사용할 수 있습니다. 따라서
다음 스핀들에 한하여 M 명령의 프로그램 기능이 확장됩니다.
M1=3, M1=4, M1=5, M1=40, ... ; M3, M4, M5, M40, ... 스핀들 1의 경우
M2=3, M2=4, M2=5, M2=40, ... ; M3, M4, M5, M40, ... 스핀들 2의 경우
8.8 H 기능
기능
H 기능을 사용하면 부동 소수점 데이터(REAL 데이터 형식 - 산술 파라메타는 “산술 파라메타 R” 절 참조)를 프로그램에서 PLC로 전달할 수 있습니다. 해당 H 기능의 값 의미는 기계 제조업체에서 정의합니다.
프로그래밍
H0=... to H9999=... ; 블록당 최대 3개 H 기능
프로그램 예제
N10 H1=1.987 H2=978.123 H3=4 ; 블록당 H 기능 3개 N20 G0 X71.3 H99=-8978.234 ; 블록 안에서 축 이동 사용 N30 H5 ; H0=5.0에 해당
참고
M과 H 기능 외에도, T, D 및 S 기능은 PLC로 전달될 수도 있습니다. 하나의 NC 블록에서 총 10개의 기능 출력을 사용할 수 있습니다.

프로그래밍
8.9 산술 파라메타 R, LUD 및 PLC 변수
8-231 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.9 산술 파라메타 R, LUD 및 PLC 변수
8.9.1 산술 파라메타 R
기능
산술 파라메타는, NC 프로그램 상에서 한번 할당된 값을 지속적으로 사용할 수 없거나 또는
값을 계산해야 하는 경우에 사용됩니다. 프로그램 실행 중 시스템에서 필요한 값을 설정하거
나 계산할 수 있습니다.
산술 파라메타 값은 조작자 입력을 통해 설정할 수도 있습니다. 산술 파라메타에 할당된 값은
변수 값을 사용하여 프로그램 내 다른 NC 주소에도 할당할 수 있습니다.
프로그래밍
R0=... to R299=... ; R 파라메타에 값 할당 R[R0]=... ; 간접 프로그램: 숫자가 포함된 R 파라메타에 값 할당, 예: R0에서 X=R0 ; 산술 파라메타를 NC 주소에 할당, 예: X축에 대해
값 지정
다음 범위의 값을 R 파라메타에 할당할 수 있습니다.
± (0.000 0001 ... 9999 9999) (소수점 8자리, 산술 부호 및 소수점)
정수 값의 경우 소수점을 생략할 수 있습니다. 양수 부호(+)는 항상 생략됩니다.
예제: R0=3.5678 R1=-37.3 R2=2 R3=-7 R4=-45678.123
지수 표기를 사용하여 확장된 범위 수를 할당합니다.
± (10-300 ... 10+300).
지수 값은 EX 문자 뒤에 적습니다. 최대 문자 수: 10(선행 부호 및 소수점 포함) EX 값 범위: -300 ~ +300
예제: R0=-0.1EX-5 ; 의미: R0 = -0.000 001 R1=1.874EX8 ; 의미: R1 = 187 400 000
참고 설명: 산술식 지정을 포함하여 여러 개의 지정을 한 블록에 포함시킬 수 있습니다.

프로그래밍
8.9 산술 파라메타 R, LUD 및 PLC 변수
8-232 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
다른 주소에 할당
NC 프로그램은 이러한 산술 파라메타 또는 산술 파라메타를 사용하는 식을 다른 NC 주소에 할당할 수 있는 유연성을 제공합니다. 값, 산술식 및 산술 파라메타를 모든 주소에 할당할 수 있습니다. 예외: 주소 N, G 및 L.
할당할 때 주소 문자 뒤에 “ =” 기호를 붙이십시오. 또한 음수 부호를 사용하여 할당할 수도 있습니다.
축 주소에 할당하는 경우에는 개별 블록이 필요합니다(이송 명령).
예제: N10 G0 X=R2 ; X축에 할당
산술 연산/산술 함수
연산자/산술 함수를 사용하는 경우에는 기존 산술 표기를 사용해야 합니다. 가공 우선순위는
소괄호를 사용하여 설정합니다. 그렇지 않으면, 곱셈과 나눗셈을 덧셈과 뺄셈보다 우선합니다.
각도는 삼각 기능에 사용됩니다.
사용할 수 있는 산술 함수: “명령 목록” 절 참조
프로그램 작성 예제: R 파라메타를 사용하여 계산
N10 R1= R1+1 ; 이전 R1 + 1을 하여 새 R1을 계산합니다. N20 R1=R2+R3 R4=R5-R6 R7=R8* R9 R10=R11/R12 N30 R13=SIN(25.3) ; R13 결과는 25.3도의 사인값입니다. N40 R14=R1*R2+R3 ; 곱셈이나 나눗셈이 덧셈이나 뺄셈보다 우선합니다. R14=(R1*R2)+R3 N50 R14=R3+R2*R1 ; 블록 N40의 결과
N60 R15=SQRT(R1*R1+R2*R2) ; 의미: R15= R12 + R22 N70 R1= -R1 ; 새 R1은 이전 R1의 음수 값입니다.
프로그램 작성 예제: R 파라메타를 축에 할당
N10 G1 G91 X=R1 Z=R2 F300 ; 개별 블록(이송 블록)
N20 Z=R3
N30 X= -R4
N40 Z= SIN(25.3)-R5 ; 산술 연산 포함
...
프로그램 작성 예제: 간접 프로그램
N10 R1=5 ; R1에 값 5(정수)를 직접 할당
… N100 R[R1]=27.123 ; R5에 값 27.123을 직접 할당

프로그래밍
8.9 산술 파라메타 R, LUD 및 PLC 변수
8-233 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.9.2 LUD(로컬 사용자 데이터)
기능
조작자/프로그래머(사용자)는 프로그램 안에 값 데이터 형식에서 고유의 변수를 정의할 수 있
습니다(LUD = 로컬 사용자 데이터). 이러한 변수는 정의되는 프로그램에서만 사용할 수 있습
니다. 정의는 프로그램이 시작되자 마자 발생하며 동시에 값 할당과도 연결될 수 있습니다. 그
렇지 않을 경우에는 시작 값이 0입니다.
값 이름은 프로그래머가 정의할 수 있습니다. 다음은 명명 규칙입니다.
• 최대 32자까지 사용할 수 있습니다.
• 처음 두 자는 문자여야 합니다. 그 뒤에는 문자, 밑줄 또는 숫자를 사용할 수 있습니다.
• 시스템에서 이미 사용 중인 이름(NC 주소, 키워드, 프로그램 이름, 서브루틴 등)은 사용하
지 마십시오.
프로그램/데이터 형식
DEF BOOL varname1 ; “Bool” 형식, 값: TRUE (=1), FALSE (=0) DEF CHAR varname2 ; “Char” 형식, ASCII 코드로 된 문자 1개: “a”, “b”, ... ; 숫자 코드 값: 0 ... 255 DEF INT varname3 ; 정수(INT) 유형, 정수 값, 32비트 값 범위: ; –2 147 483 648 ... +2 147 483 648(십진수) DEF REAL varname4 ; “Real” 형식, 실수(R 파라메타 등), ; 값 범위: ± (0.000 0001 ... 9999 9999) ; (소수점 8자리, 산술 부호 및 소수점) 또는 ; 지수 표기: ± (10-300 ... 10+300 ) DEF STRING[string length] varname41 ; 문자열 형식, [문자열 길이]: 최대 문자 수
각 데이터 형식마다 고유의 프로그램 라인이 필요합니다. 그러나 동일한 형식의 몇 개 변수를 하나의 라인에 정의할 수 있습니다. 예제: DEF INT PVAR1, PVAR2, PVAR3=12, PVAR4 ; INT 유형의 4개 변수
STRING 유형을 사용한 할당 예: DEF STRING[12] PVAR=“Hello” ; PVAR 변수를 최대 12자로 정의하고 문자열 Hello 할당
필드
개별 변수 외에 이러한 데이터 형식의 변수에 대해 2차원 필드도 정의할 수 있습니다. DEF INT PVAR5[n] ; INT 형식의 1차원 필드, n: 정수 DEF INT PVAR6[n,m] ; INT 형식의 2차원 필드, n, m: 정수 예제: DEF INT PVAR7[3] ; INT 유형의 요소가 3개인 필드

프로그래밍
8.9 산술 파라메타 R, LUD 및 PLC 변수
8-234 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 안에서 개별 필드 성분은 필드 색인을 통해 도달할 수 있으며 개별 변수처럼 다룰 수 있습니다. 필드 색인의 범위는 0에서부터 몇 개 성분까지입니다.
예제: N10 PVAR7[2]=24 ; 세 번째 필드 요소(인덱스 2 사용)에는 값 24가 할당됩니다.
SET 명령을 사용하여 필드에 값 할당: N20 PVAR5[2]=SET(1,2,3) ; 3번째 필드 요소에서 시작하며, 서로 다른 값이 할당됩니다.
REP 명령을 사용하여 필드에 값 할당: N20 PVAR7[4]=REP(2) ; 필드 요소 [4]에서 시작하며 모든 값이 할당됩니다. 여기서는 모두 2입니다.
8.9.3 PLC 변수 읽기 및 쓰기
기능
NC와 PLC 간에 데이터 교환이 신속하게 이루어질 수 있도록 PLC 사용자 인터페이스에는 길이
512바이트의 특수한 데이터 영역이 있습니다. 이 영역에서는 PLC 데이터가 데이터 형식과 위
치 옵셋 평면에서 호환됩니다. NC 프로그램에서 이러한 호환되는 PLC 변수는 읽거나 쓸 수 있
습니다. 이를 위해 다음과 같이 특수한 시스템 변수가 제공됩니다.
$A_DBB[n] ; 데이터 바이트(8비트 값)
$A_DBW[n] ; 데이터 워드(16비트 값)
$A_DBD[n] ; 데이터 더블 워드 (32비트 값)
$A_DBR[n] ; REAL 데이터(32비트 값)
여기서 “n”은 위치 옵셋(데이터 영역의 시작 부분에서 변수 시작 부분까지)을 바이트 단위로
나타냅니다.
예제:
R1=$A_DBR[5] ; REAL 값 읽기, 옵셋 5(이 영역의 5바이트에서 시작)
참고 사항
• 변수를 읽으면 전처리 정지점이 생성됩니다(내부 STOPRE).
• 최대 3개의 변수를 하나의 블록 안에 동시에 쓸 수 있습니다.

프로그래밍
8.10 프로그램 점프
8-235 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.10 프로그램 점프
8.10.1 프로그램 점프를 위한 점프 대상
기능
레이블 또는 블록 번호는 프로그램 점프를 위해 블록을 점프 대상으로 표시하는 데 사용됩니다. 프로그램 점프를 사용하면 프로그램 시퀀스로 분기할 수 있습니다.
레이블은 자유롭게 선택할 수 있지만, 최소 2자 및 최대 8자(숫자 또는 글자)가 포함되어야 하며, 처음 2자는 글자 또는 밑줄이어야 합니다.
점프 대상으로 사용되는 블록 내 레이블은 콜론(:)으로 끝납니다. 레이블은 항상 블록 시작에 나타납니다. 블록 번호가 있는 경우 레이블은 블록 번호 뒤에 입력됩니다.
프로그램 안에서 동일한 이름의 레이블은 사용할 수 없습나다.
프로그램 예제
N10 LABEL1: G1 X20 ; “LABEL1” 이 레이블, 점프 대상 ... TR789: G0 X10 Z20 ; TR789는 레이블, 점프 대상 - 블록 번호가 없습니다. N100 ... ; 블록 번호는 점프 대상이 될 수 있습니다. ...
8.10.2 비조건식 프로그램 점프
기능
NC 프로그램은 작성될 때 배열된 순서대로 블록을 처리합니다.
처리 순서는 프로그램 점프 삽입으로 변경될 수 있습니다.
점프 대상은 레이블 또는 블록 번호가 지정된 블록입니다. 이 블록은 프로그램 안에 있어야 합니다.
비조건식 점프 명령에는 개별 블록이 필요합니다.

프로그래밍
8.10 프로그램 점프
8-236 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그래밍
GOTOF Label ; GoTo 동작(프로그램의 마지막 블록 방향으로) GOTOF Label ; GoBack 동작(프로그램의 첫 번째 블록 방향으로) Label ; 레이블(점프 레이블) 또는 블록 번호로 선택한 문자열
그림 8-52 무조건 부 점프 예제
8.10.3 조건식 프로그램 점프
기능
점프 조건은 IF 명령 뒤에 지정됩니다. 점프 조건(0이 아닌 값)이 충족되면 점프가 수행됩니다. 점프 대상은 레이블 또는 블록 번호가 지정된 블록입니다. 이 블록은 프로그램 안에 있어야 합니다.
조건식 점프 명령에는 개별 블록이 필요합니다. 몇 개의 조건식 점프 명령이 동일한 블록에 있을 수 있습니다.
조건식 프로그램 점프를 사용하면 필요에 따라 프로그램 길이를 크게 줄일 수도 있습니다.
프로그래밍
IF condition GOTOF label ; GoTo 동작 (정방향 점프)
IF condition GOTOB label ; GoBack 동작 (역방향 점프)
GOTOF ; 정방향 점프 (프로그램의 마지막 블록 방향으로 점프)
GOTOB ; 역방향 점프 (프로그램의 첫 번째 블록 방향으로 점프)
Label ; 레이블 (점프 레이블) 또는 블록 번호로 선택한 문자열
IF ; 점프 조건 삽입
Condition ; R 파라메타, 조건을 공식으로 표현하는 산술식

프로그래밍
8.10 프로그램 점프
8-237 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
비교 연산
연산자 의미
= = 같음
< > 같지 않음
> 보다 큼
< 보다 작음
> = 보다 크거나 같음
< = 보다 작거나 같음
비교 연산은 점프 조건을 공식화하는 데 사용됩니다. 산술식도 비교할 수 있습니다.
비교 연산 결과는 “충족됨” 또는 “충족되지 않음”입니다. “충족되지 않음”은 값을 0으로 설정합
니다.
연산자 비교 프로그램 예제
R1>1 ; R1이 1보다 큼 1 < R1 ; 1이 R1보다 작음 R1<R2+R3 ; R1이 R2+R3보다 작음 R6>=SIN( R7*R7) ; R6이 SIN(R7)2 보다 크거나 같음
프로그램 예제
N10 IF R1 GOTOF LABEL1 ; R1이 0이 아니면 LABEL1 블록으로 이동 ... N90 LABEL1: ... N100 IF R1>1 GOTOF LABEL2 ; R1이 1보다 크면 LABEL2 블록으로 이동 ... N150 LABEL2: ... ... N800 LABEL3: ... ... N1000 IF R45==R7+1 GOTOB LABEL3 ; R45가 R7 +1인 경우 LABEL3 블록으로 이동 ... 블록 내 몇몇 조건 점프: N10 MA1: ... ... N20 IF R1==1 GOTOB MA1 IF R1==2 GOTOF MA2 ... ... N50 MA2: ...
참고 설명: 처음으로 충족되는 조건에 대해 점프가 실행됩니다.

프로그래밍
8.10 프로그램 점프
8-238 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.10.4 점프 프로그램 예
작업
원 구간의 지점으로 이동: 전제: 시작각: 30° R1에서 원 반경: 32 mm R2에서 위치 간격: 10° R3에서 점 개수: 11 R4에서 Z축 원 중심 위치: 50 mm R5에서 X축 원 중심 위치: 20 mm R6에서
그림 8-53 원 구간 상의 점으로 직선 이동
프로그램 예제
N10 R1=30 R2=32 R3=10 R4=11 R5=50 R6=20 ; 시작값 할당 N20 MA1: G0 Z=R2 *COS (R1)+R5 X=R2*SIN(R1)+R6 ; 계산 및 축 주소에 할당 N30 R1=R1+R3 R4= R4-1 N40 IF R4 > 0 GOTOB MA1 N50 M2
설명
블록 N10에서 시작 조건이 해당 산술 파라메타에 할당됩니다. X 축과 Z 축의 좌표 계산과 처리는 N20에서 수행됩니다.
블록 N30에서, R1은 R3 공차 각도만큼 증가되고 R4는 1만큼 감소됩니다. R4 > 0이면 N20이 다시 실행됩니다. 그렇지 않으면 N50에서 프로그램이 끝납니다.

프로그래밍
8.11 서브루틴 기법
8-239 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.11 서브루틴 기법
8.11.1 일반
응용 예제
기본적으로 주 프로그램과 서브루틴 간에 차이는 없습니다.
자주 발생하는 가공 순서(예: 특정 형상 모양)가 서브루틴에 저장됩니다. 이러한 서브루틴은 주 프로그램의 해당 위치에서 호출된 후 실행됩니다.
서브루틴의 한 가지 형태로 가공 싸이클이 있습니다. 가공 싸이클에는 일반적으로 사용할 수 있는 가공 시나리오(예: 나사 절삭, 스톡 제거 등)가 포함됩니다. 포함된 전달 파라메타를 통해 값을 할당하면 서브루틴을 특정 용도에 맞출 수 있습니다.
구조
서브루틴의 구조는 메인 프로그램의 구조와 동일합니다(8.1.2절 “프로그램 구조” 참조). 메인 프로그램과 마찬가지로, 서브루틴에도 프로그램 순서의 마지막 블록에 M2(프로그램 끝)가 포함됩니다. 다시 말해서 하위 프로그램이 호출된 프로그램 레벨로 복귀함을 의미합니다.
프로그램 종료
종료 명령 RET를 서브루틴에서 M2 프로그램 끝 대신에 사용할 수도 있습니다.
RET는 개별 블록으로 프로그램됩니다.
RET 명령은 G64 연속 경로 모드가 복귀에 의해 중단되어서는 안 되는 경우에 사용됩니다. M2를 사용하는 경우 G64가 중단되고 정위치 정지가 시작됩니다.
그림 8-54 서브루틴를 두 번 호출할 때의 순서 예

프로그래밍
8.11 서브루틴 기법
8-240 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
하위 프로그램 예
하위 프로그램에는 여러 다른 서브루틴에서 선택할 수 있도록 고유한 이름이 지정됩니다. 프로그램을 작성하는 경우 다음 규정에 따라 원하는 대로 프로그램 이름을 선택할 수 있습니다.
이 규칙은 주 프로그램의 이름에도 동일하게 적용됩니다.
예제: BUCHSE7
또한 서브루틴에서 주소 워드 L...을 사용할 수도 있습니다. 값에는 7자리(정수만)를 사용할 수 있습니다.
주의 사항: 주소 L을 사용할 때 앞에 0이 나오면 다른 주소로 구분됩니다.
예제: L128은 L0128이나 L00128이 아닙니다! 각 서브루틴은 3개의 서로 다른 서브루틴입니다.
참고: 서브루틴 이름 L6은 공구 변경용으로 예약되어 있습니다.
서브루틴 호출
서브루틴은 이름을 통해 프로그램(주 프로그램 또는 하위 프로그램)에서 호출됩니다. 그러기 위해서는 개별 블록이 필요합니다.
예제: N10 L785 ; 서브루틴 L785 호출 N20 WELLE7 ; 서브루틴 WELLE7 호출
프로그램 반복 P... 서브루틴을 연속으로 몇 번 실행해야 하는 경우 서브루틴 이름 다음에 주소 P 바로 뒤에 호출 블록에서 실행할 횟수를 지정하십시오. 최대 9,999(P1 ... P9999)번을 지정할 수 있습니다.
예제: N10 L785 P3 ; 서브루틴 L785 3번 호출
중첩 깊이
하위 프로그램은 메인 프로그램은 물론, 다른 하위 프로그램에서도 호출할 수 있습니다. 이러한 중첩 호출에는 메인 프로그램 레벨을 포함하여 최대 8개 프로그램 레벨을 중첩할 수 있습니다.
그림 8-55 8개의 프로그램 레벨에서 실행

프로그래밍
8.11 서브루틴 기법
8-241 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
정보
모달 G 기능은 서브루틴에서 변경될 수 있습니다. 예: G90 - G91. 호출하는 프로그램으로 돌아가는 경우 모든 모달 기능이 원하는 대로 설정되어 있는지 확인하십시오.
상위 프로그램 레벨에서 사용되는 산술 파라메타의 값이 하위 프로그램 레벨에서 잘못 변경
되지 않았는지 확인하십시오.
SIMENS 싸이클을 사용하는 경우에는 최대 4개의 프로그램 레벨이 필요합니다.
8.11.2 가공 싸이클 호출
기능
싸이클은 특정 가공 프로세스를 인식하는 기술 서브루틴으로 반복 싸이클 호출 시 파라메타/값을 제공함으로써 특정 문제에 직접 적용됩니다.
프로그램 예제
N10 CYCLE83(110, 90, ...) ; 사이클 83 호출, 값 직접 전달, 개별 블록 ... N40 RTP=100 RFP= 95.5 ... ; 싸이클 82의 전달 파라메타 설정 N50 CYCLE82(RTP, RFP, ...) ; 싸이클 82 호출, 개별 블록

프로그래밍
8.12 타이머와 공작물 카운터
8-242 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.12 타이머와 공작물 카운터
8.12.1 런타임 타이머
기능
타이머는 프로그램이나 디스플에이서만 기술적 프로세스를 모니터링하는 데 사용할 수 있는 시스템 변수($A...)로 제공됩니다. 이러한 타이머는 읽기 전용입니다. 항상 활성화되어 있는 타이머가 있습니다. 그 밖의 타이머
는 머신 데이터를 통해 비활성화할 수 있습니다.
타이머 - 항상 활성
• $AN_SETUP_TIME – 마지막 “기본값을 사용한 시스템 스타트업” 이후 경과된 시간(분) “기본값을 사용한 시스템 스타트업”의 경우 타이머가 0으로 자동 리셋됩니다.
• $AN_POWERON_TIME – 마지막으로 “기본값을 사용한 시스템 스타트업” 이후 경과 시간(분 단위) 제어 시스템의 스타트업마다 0으로 자동 리셋됩니다.
비활성화할 수 있는 타이머
다음 타이머는 머신 데이터(기본 설정)를 통해 활성화됩니다. 시작은 타이머마다 다릅니다. 각 활성 실행 시간 측정은 피드 오버라이드를 초기화하기 위해 또는 중지된 프로그램 상태에서 자동으로 중단됩니다. 활성 드라이런 피드 및 프로그램 테스트를 위해 활성화된 타이머의 동작은 머신 데이터를 사용하여 지정할 수 있습니다.
• $AC_OPERATING_TIME – 자동 모드에 있는 NC 프로그램의
총 실행 시간(초)
자동 모드에서 NC 시작부터 프로그램 종료/리셋 사이에 실행된 모든 프로그램의 실행 시
간이 합산됩니다. 제어 시스템의 스타트업마다 타이머가 0으로 리셋됩니다.
• $AC_CYCLE_TIME – 선택한 NC 프로그램의 실행 시간(초)
선택한 NC 프로그램에서 NC 시작부터 프로그램 종료/리셋 사이의 실행 시간이 측정됩니
다. 새로운 NC 프로그램을 시작하면 타이머가 리셋됩니다.
• $AC_CUTTING_TIME – 공구 사용 시간(초)
급 이송 없이 공구 동작 상태(기본 설정)에서 NC 시작부터 프로그램 종료/리셋 사이에 모
든 NC 프로그램에서 실제로 공구를 사용하여 공작물을 가공한 시간이 측정됩니다.
또한 드웰 시간이 동작 중일 때 측정이 중단됩니다.
“기본값을 사용한 시스템 스타트업”의 경우 자동으로 타이머가 0으로 리셋됩니다.

프로그래밍
8.12 타이머와 공작물 카운터
8-243 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그램 예제
N10 IF $AC_CUTTING_TIME>=R10 GOTOF WZZEIT ; 공구 사용 시간 제한값? ... N80 WZZEIT: N90 MSG("총 사용 시간: 제한값에 도달함") N100 M0
디스플레이
“OFFSET/PARAM(옵셋/파라메타)” > “Setting data(셋팅 데이터)” > “Timers/counters(타이머/
카운터)” 조작 영역의 화면에 활성 시스템 변수의 내용이 표시됩니다.
총 실행 시간 = $AC_OPERATING_TIME
프로그램 실행 시간 = $AC_CYCLE_TIME
피드 실행 시간 = $AC_CUTTING_TIME
콜드 재시작 이후 경과된 시간 = $AN_SETUP_TIME
웜 재시작 이후 경과된 시간 = $AN_POWERON_TIME
“프로그램 실행 시간”은 자동 모드에서 “Position(위치)” 조작 영역의 정보 행에도 표시됩니다.
8.12.2 공작물 카운터
기능
“공작물 카운터” 기능은 공작물 개수를 세기 위한 카운터를 제공합니다. 이 카운터는 프로그램의 쓰기 및 읽기 액세스 또는 조작자 입력을 통해 시스템 변수로 제공됩
니다 (쓰기 사용 권한을 확인하십시오!) 머신 데이터를 사용하면 카운터 활성화, 카운터 리셋 시간 및 카운팅 알고리즘을 제어할 수 있습니다.
카운터
• $AC_REQUIRED_PARTS – 요구 수량
이 카운터에는 실제 공작물 카운터 $AC_ACTUAL_PARTS를 0으로 리셋하는 공작물 개수
를 정의할 수 있습니다.
머신 데이터를 통해 디스플레이 알람 21800 “Workpiece setpoint reached(공작물 지령치
에 도달함)” 메시지가 표시될 수도 있습니다.
• $AC_TOTAL_PARTS – 전체 소재(“total act.”)
이 카운터는 가공을 시작한 후 생산된 모든 공작물의 총 수량을 지정합니다.
이 카운터는 제어 시스템을 부팅할 때마다 0으로 자동 설정됩니다.
• $AC_ACTUAL_PARTS – 가공 수량(“current act.”)
시작 시점 이후 생산된 모든 공작물의 수가 계산됩니다. 공작물 지령치
( $AC_REQUIRED_PARTS, 0보다 큰 값)에 도달하면 카운터가 0으로 자동 설정됩니다.

프로그래밍
8.12 타이머와 공작물 카운터
8-244 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
• $AC_SPECIAL_PARTS – 사용자가 지정한 공작물 수 이 카운터를 사용하면 사용자가 고유 정의에 따라 공작물 개수를 계산할 수 있습니다. 이 경우, $AC_REQUIRED_PARTS(“필요한 공작물 수량”)를 사용하여 알람 출력을 정의할 수도 있습니다. 사용자가 직접 카운터를 리셋해야 합니다.
프로그램 예제
N10 IF $AC_TOTAL_PARTS==R15 GOTOF SIST ; 목표 수량에 도달했습니까? ... N80 SIST: N90 MSG("공작물 목표 수량에 도달함") N100 M0
디스플레이
“OFFSET/PARAM(옵셋/파라메타)” > “셋팅 데이터” > “시간/카운터” 조작 영역의 화면에 활성 시스템 변수의 내용이 표시됩니다. 전체 수량 = $AC_TOTAL_PARTS 요구 수량 = $AC_REQUIRED_PARTS 가공 수량 = $AC_ACTUAL_PARTS $AC_SPECIAL_PARTS 표시할 수 없음
“가공 수량”도 “Position(위치)” 조작 영역의 정보 행에 자동 모드로 표시됩니다.

프로그래밍
8.13 공구 모니터링을 위한 언어 명령
8-245 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
8.13 공구 모니터링을 위한 언어 명령
8.13.1 공구 모니터링 개요
이 기능은 SINUMERIK 802D sl plus 및 pro에서 사용할 수 있습니다.
기능
공구 모니터링은 머신 데이터를 통해 활성화됩니다. 활성 공구에 대해 다음의 활성 절삭날 모니터링 유형을 사용할 수 있습니다.
• 공구 수명 모니터링
• 공작물 수량 모니터링
위에서 설명한 모니터링 유형은 한가지 도구(T)에 대해 동시에 활성화할 수 있습니다.
공구 모니터링의 제어/데이터 입력은 조작을 통해 수행하는 것이 좋습니다. 또한, 다양한 기능
을 프로그램할 수도 있습니다.
모니터링 카운터
각 모니터링 유형마다 모니터링 카운터가 있습니다. 모니터링 카운터는 0보다 큰 설정값에서 0으로 카운트 다운됩니다. 카운터가 0보다 작거나 같은 값으로 감소된 경우 제한값에 도달합니다. 그리고 나서 해당 알람 메시지가 표시됩니다.
모니터링 유형 및 조건에 대한 시스템 변수
• $TC_TP8[t] ; 번호가 t인 공구의 상태: 비트 0 =1: 공구 활성 =0: 공구가 동작 중이 아님 비트 1 =1: 공구 사용 가능 =0: 인에이블 상태 아님 비트 2 =1: 공구 사용 불가능 =0: 사용 가능함 비트 3 : 예약됨 비트 4 =1: 조기 경고 한계에 도달함 =0: 도달하지 않음
• $TC_TP9[t] ; 번호가 t인 공구에 대한 모니터링 기능 유형: = 0: 모니터링 안 함 = 1: (공구)수명 모니터링 공구 = 2: 개수 모니터링 공구
이러한 시스템 변수는 NC 프로그램에서 읽고 쓸 수 있습니다.
공구 모니터링 데이터용 시스템 변수
표 8-2 공구 모니터링 데이터
식별자 설명 데이터 형식 사전 할당
$TC_MOP1[t,d] 공구 수명 경고 제한(분) REAL 0.0
$TC_MOP2[t,d] 잔여 수명(분) REAL 0.0
$TC_MOP3[t,d] 수량 경고 제한 INT 0
$TC_MOP4[t,d] 잔여 수량 INT 0

프로그래밍
8.13 공구 모니터링을 위한 언어 명령
8-246 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
... ...
$TC_MOP11[t,d] 공구 수명 지령치 REAL 0.0
$TC_MOP13[t,d] 프로그램된 장치 수량 INT 0
공구 번호 T를 나타내는 t, D 번호를 나타내는 d
활성 공구용 시스템 변수
다음은 시스템 변수를 통해 NC 프로그램에서 조회할 수 있습니다.
• $P_TOOLNO ; 활성 공구 T의 번호
• $P_TOOL ; 활성 공구의 활성 D 번호
8.13.2 공구 수명 모니터링
공구 수명 모니터링은 현재 사용중인 공구 절삭날에 대해 수행됩니다(활성 공구 T의 활성 절
삭날 D).
경로 축 이송(G1, G2, G3, ... G0에 대해서는 아님), 이 공구 절삭날의 남은 공구 수명
($TC_MOP2[t,d] )이 업데이트됩니다. 공구 절삭날의 남은 공구 수명이 “공구 수명 조기 경고
한계” ($TC_MOP1[t,d] ) 값보다 낮으면 인터페이스 신호 "를 통해 PLC로 보고됩니다.
잔여 공수 수명이 0 이하이면 알람이 발생하며 추가 인터페이스 신호가 설정됩니다. 공구가
“사용 불가능” 상태로 변경되고 이 상태가 바뀔 때까지 프로그램할 수 없습니다. 조작자가
개입해야 합니다. 조작자가 공구를 교환하거나 가공 작업에 필요한 공구가 설치되었는지 확
인해야 합니다.
$A_MONIFACT 시스템 변수
$A_MONIFACT 시스템 변수(REAL 데이터 형식)를 사용하면 모니터링 시계를 느리게 또는 빠르게 실행할 수 있습니다. 예를 들어, 이 팩터는 사용되는 공작물 소재에 따라 다양한 종류
의 마모를 고려하기 위해 공구를 사용하기 전에 설정할 수 있습니다.
제어 시스템 스타트업 후 프로그램 리셋/종료 $A_MONIFACT 인수 값은 1.0이 됩니다. 실제 시간이 적용됩니다. 계산 예: $A_MONIFACT=1 1분(실시간) = 1분의 공구 수명 감소 $A_MONIFACT=0.1 1분(실시간) = 0.1분의 공구 수명 감소 $A_MONIFACT=5 1분(실시간) = 5분의 공구 수명 감소
RESETMON( )을 사용하여 지령치 업데이트
RESETMON(state, t, d, mon) 함수는 실제 값을 지령치로 설정합니다.
• 모든 절삭날에 대해 또는 특정 공구의 특정 절삭날에 대해서만
• 모든 모니터링 유형에 대해 또는 특정 모니터링 유형에 대해서만

프로그래밍
8.13 공구 모니터링을 위한 언어 명령
8-247 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
전송 파라메타:
INT state 명령 실행 상태:
= 0 명령이 실행되었습니다.
= –1 지정한 D 번호의 절삭날이 없습니다.
= –2 지정한 T 번호 t의 공구가 없습니다.
= –3 지정한 공구 t에 모니터링 기능이 정의되어 있지 않습니다.
= –4 모니터링 기능이 활성화되지 않았습니다. 예: 명령이 실행되지 않습니다.
INT t 내부 T 번호:
= 0 모든 공구에 대해
<> 0 (해당 공구) (t < 0 : 절대값 생성 |t|)
INT d 선택적: 번호가 t인 공구의 D 번호:
> 0 이 D 번호에 대해
d / = 0 사용 안 함 공구 t의 모든 절삭날
INT mon 선택적: 모니터링 형식을 나타내는 비트 코드 파라메타($TC_TP9와 같은 값):
= 1: 공구 수명
= 2: 수량
mon = 0 사용 안 함: 공구 t에 대해 활성화되어 있는 모니터링 기능의 모든 실제값이
지령치로 설정됩니다.
참고:
– “프로그램 테스트”가 활성 상태일 때는 RESETMON( )이 적용되지 않습니다.
– 프로그램을 시작할 때 DEF 문을 사용하여 state 상태 피드백에 대한 변수를 정의해야
합니다: DEF INT state
변수에 state 대신 다른 이름(state 대신에, 2글자로 시작하는 최대 15자 길이의 이름)
을 정의할 수도 있습니다. 이 변수는 정의된 프로그램에서만 사용할 수 있습니다.
모니터링 유형 mon에 대한 변수에도 적용될 수 있습니다. 또한 여기에 필요한 지정이
모두 있는 경우 숫자(1 또는 2)로 직접 전송할 수도 있습니다.
8.13.3 공작물 수량 모니터링
활성 공구의 활성 절삭날에 대한 공작물 수량이 모니터링됩니다. 공작물 개수 모니터링 기능은 공작물 제작에 사용되는 모든 절삭날을 기록합니다. 새 파라메
타로 인해 수량이 변경되면 모니터링 데이터가 마지막 단위 수량 이후에 활성화된 모든 공구 절삭날에 맞춰집니다.
조작자 입력 또는 SETPIECE( )를 통해 공작물 수량 업데이트
공작물 수량은 조작자 입력(HMI) 또는 NC 프로그램에서 SETPIECE() 명령을 업데이트할 수 있습니다.

프로그래밍
8.13 공구 모니터링을 위한 언어 명령
8-248 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
SETPIECE 기능을 사용하여 가공 프로세스에 동원된 공구에 대한 공작물 수량 모니터링 데
이터를 업데이트할 수 있습니다.
SETPIECE(n)를 프로그램한 경우 내부 setpiece 메모리가 검색됩니다. 이 “메모리”가 공구의
절삭날 하나에 대해 설정된 경우, 해당 절삭날의 부품 수량(잔여 부품 수량 - $TC_MOP4)이
지정한 값만큼 감소되고 해당 “메모리”(setpiece 메모리)가 삭제됩니다.
SETPIECE(n, s) ;
n: = 0... 32000 SETPIECE 기능을 마지막으로 실행한 이후에 생산된 공작물
수량. 잔여 수량 계산
($TC_MOP4[t,d] )가 이 값만큼 감소합니다.
s : = 1 또는 2 스핀들 1 또는 2(공구 홀더), 스핀들이 2개인 경우에만 필요함
프로그램 예제
N10 G0 X100
N20 ... N30 T1 ; T 명령을 사용하여 공구 변경
N50 D1 ... ; T1, D1를 사용하여 가공
N90 SETPIECE(2) ; $TC_MOP4[1,1 ] (T1,D1)은 2씩 감소됩니다.
N100 T2
N110 D2 ... ; T2, D2를 사용하여 가공
N200 SETPIECE(1) ; $TC_MOP4[2.2 ] (T2,D2)는 1씩 감소됩니다.
...
N300 M2
참고:
– SETPIECE( ) 명령은 블록 검색 중에 활성화되지 않습니다.
– 간단한 경우에는 $TC_MOP4[t,d]를 직접 작성하는 것이 좋습니다.
STOPRE 명령이 있는 후속 블록이 하나 필요합니다.
지령치 새로 고침
남은 공작물 카운터($TC_MOP4[t,d])를 프로그램된 공작물 수량($TC_MOP13[t,d])으로 설정
하는 프로그램된 업데이트는 일반적으로 작업자 입력(HMI)을 통해 수행됩니다. 그러나, 앞에
서 공구 수명 모니터링에 대해 설명한 바와 같이, RESETMON (state, t, d, ,mon) 기능을 통해
수행할 수도 있습니다.
예제:
DEF INT state ; 프로그램 시작 시 상태 피드백 변수 정의
... N100 RESETMON(state,12,1,2) ; T12, D1의 공작물 카운터에 대한 지령치 업데이트
지령치 2

프로그래밍
8.13 공구 모니터링을 위한 언어 명령
8-249 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그램 예제
DEF INT state ; RESETMON()에서 상태 피드백 변수 정의
; G0 X... ; 후진
T7 ; 필요할 경우 M6을 사용하여 새 공구 로드
$TC_MOP3[$P_TOOLNO,$P_TOOL]=100 ; 경고 제한 100개
$TC_MOP4[$P_TOOLNO,$P_TOOL]=700 ; 잔여 수량
$TC_MOP13[$P_TOOLNO,$P_TOOL]=700 ; 수량 지령치
; 설정 후 활성화:
$TC_TP9[$P_TOOLNO,$P_TOOL]=2 ; 수량 모니터링 활성화, 활성 공구
STOPRE
ANF: BEARBEIT ; 공작물 가공 관련 서브루틴
SETPIECE(1) ; 카운터 업데이트
M0 ; 다음 공작물; 계속하려면 <NC 시작>을
누르십시오.
IF ($TC_MOP4[$P_TOOLNO,$P_TOOL]]>1) GOTOB ANF MSG("공구 T7 마모됨 - 교체하십시오.")
M0 ; M0; 공구 변경 후 계속하려면 <NC 시작>을
누르십시오.
RESETMON(state,7,1,2) ; 공작물 카운터 지령치 업데이트
IF (state<>0) GOTOF ALARM
GOTOB ANF ALARM: ; 알람 표시:
MSG("RESTMON 에러: ” <<state)
M0
M2
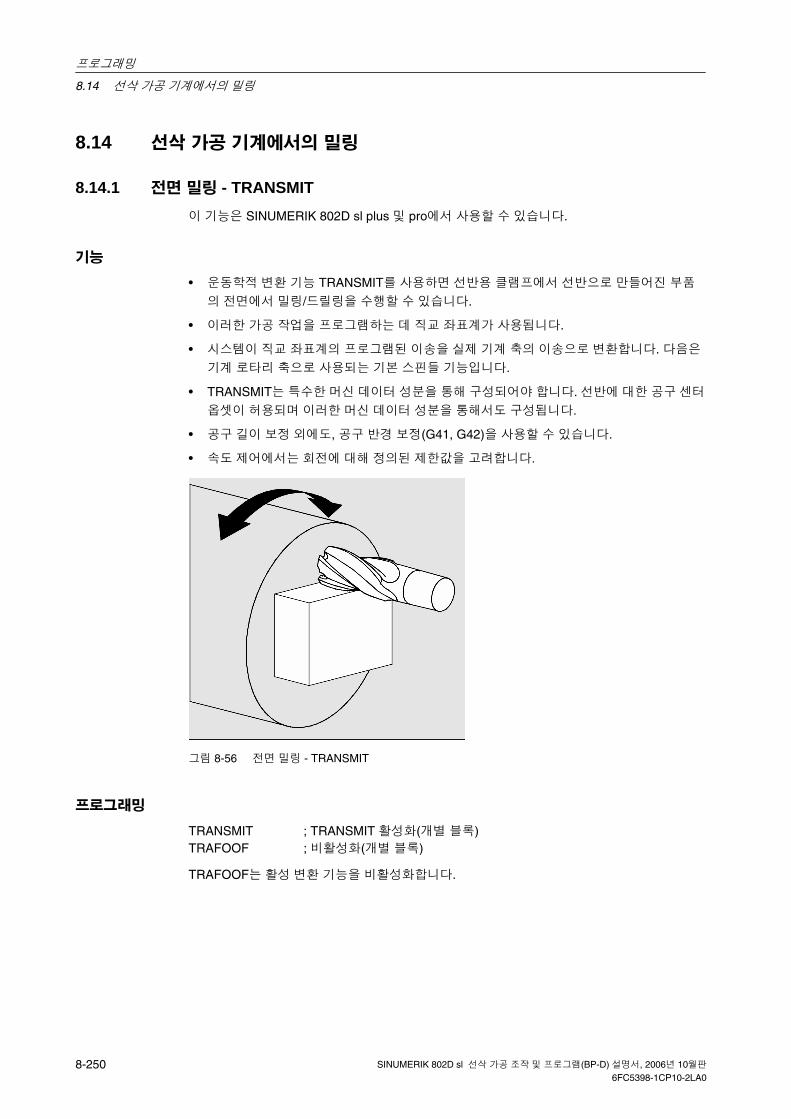
프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-250 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
8.14 선삭 가공 기계에서의 밀링
8.14.1 전면 밀링 - TRANSMIT 이 기능은 SINUMERIK 802D sl plus 및 pro에서 사용할 수 있습니다.
기능
• 운동학적 변환 기능 TRANSMIT를 사용하면 선반용 클램프에서 선반으로 만들어진 부품
의 전면에서 밀링/드릴링을 수행할 수 있습니다.
• 이러한 가공 작업을 프로그램하는 데 직교 좌표계가 사용됩니다.
• 시스템이 직교 좌표계의 프로그램된 이송을 실제 기계 축의 이송으로 변환합니다. 다음은
기계 로타리 축으로 사용되는 기본 스핀들 기능입니다.
• TRANSMIT는 특수한 머신 데이터 성분을 통해 구성되어야 합니다. 선반에 대한 공구 센터
옵셋이 허용되며 이러한 머신 데이터 성분을 통해서도 구성됩니다.
• 공구 길이 보정 외에도, 공구 반경 보정(G41, G42)을 사용할 수 있습니다.
• 속도 제어에서는 회전에 대해 정의된 제한값을 고려합니다.
그림 8-56 전면 밀링 - TRANSMIT
프로그래밍
TRANSMIT ; TRANSMIT 활성화(개별 블록) TRAFOOF ; 비활성화(개별 블록)
TRAFOOF는 활성 변환 기능을 비활성화합니다.
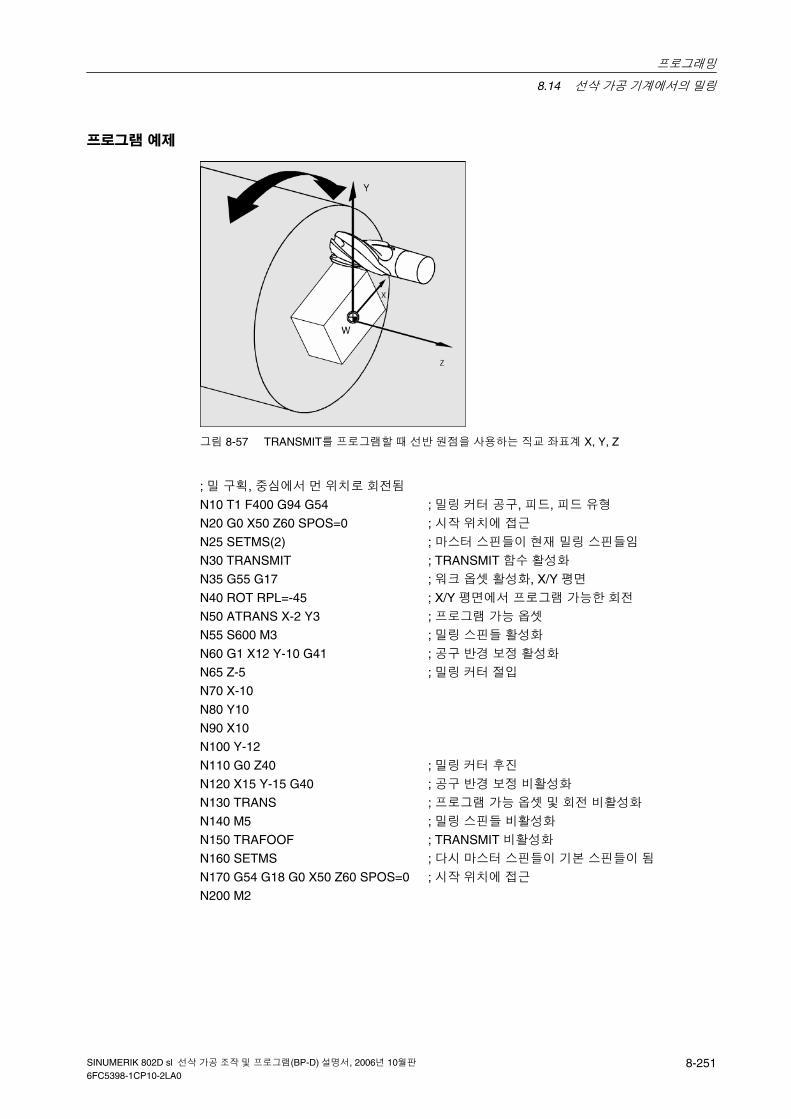
프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-251 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그램 예제
그림 8-57 TRANSMIT를 프로그램할 때 선반 원점을 사용하는 직교 좌표계 X, Y, Z
; 밀 구획, 중심에서 먼 위치로 회전됨
N10 T1 F400 G94 G54 ; 밀링 커터 공구, 피드, 피드 유형
N20 G0 X50 Z60 SPOS=0 ; 시작 위치에 접근
N25 SETMS(2) ; 마스터 스핀들이 현재 밀링 스핀들임
N30 TRANSMIT ; TRANSMIT 함수 활성화
N35 G55 G17 ; 워크 옵셋 활성화, X/Y 평면
N40 ROT RPL=-45 ; X/Y 평면에서 프로그램 가능한 회전
N50 ATRANS X-2 Y3 ; 프로그램 가능 옵셋
N55 S600 M3 ; 밀링 스핀들 활성화
N60 G1 X12 Y-10 G41 ; 공구 반경 보정 활성화
N65 Z-5 ; 밀링 커터 절입
N70 X-10
N80 Y10
N90 X10
N100 Y-12
N110 G0 Z40 ; 밀링 커터 후진
N120 X15 Y-15 G40 ; 공구 반경 보정 비활성화
N130 TRANS ; 프로그램 가능 옵셋 및 회전 비활성화
N140 M5 ; 밀링 스핀들 비활성화
N150 TRAFOOF ; TRANSMIT 비활성화
N160 SETMS ; 다시 마스터 스핀들이 기본 스핀들이 됨
N170 G54 G18 G0 X50 Z60 SPOS=0 ; 시작 위치에 접근
N200 M2

프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-252 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
정보
X0/Y0인 선반이 극으로 지정됩니다. 극 부근에서는 공작물 가공 작업을 수행하지 않는 것이 좋습니다. 로타리 축의 오버로드를 방지하기 위해 피드를 크게 낮춰야 할 수도 있기 때문입니
다. 공구가 극에 정확히 놓여 있으면 TRANSMIT을 선택하지 마십시오. 공구 중심점의 경로가 X0/Y0 극을 통과하여 이동하지 않아야 합니다.
참조: “공구 보정에 대한 특수 처리” 절의 기능 설명
8.14.2 주변 표면 밀링 - TRACYL
이 기능은 SINUMERIK 802D sl plus 및 pro에서 사용할 수 있습니다.
기능
• 운동학적 변환 기능 TRACYL은 원통형 개체의 주변 표면에 대한 밀링 가공에 사용되며,
이 기능을 사용하면 임의의 위치에 홈을 생성할 수 있습니다.
• 가공하는 원통 직경에 대해 논리적으로 전개된 평면 주위 표면에서 홈 경로가 프로그램됩
니다.

프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-253 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 8-58 TRACYL을 프로그램할 때 직교 좌표계 X, Y, Z
• 이 컨트롤은 직교 좌표계 X, Y, Z의 프로그램된 이송을 실제 가공 축의 이송으로 변환합
니다. 다음은 기계 로타리 축으로 사용되는 기본 스핀들 기능입니다.
• TRACYL은 특수한 머신 데이터를 사용하여 구성해야 합니다. 값 Y=0인 로타리 축 위치도
여기에 정의됩니다.
• 기계에 실제 기계 Y 축 (YM)이 있는 경우 확장된 TRACYL 변형을 구성할 수 있습니다. 이
렇게 하면 홈 측면 보정이 지정된 홈을 생성할 수 있습니다. 홈 측면과 홈 밑면은 서로 수직
을 이룹니다. 밀링 공구의 직경이 홈 너비보다 작은 경우에도 마찬가지입니다. 그렇지 않
으면, 밀링 커터를 정확히 맞춘 경우에만 사용할 수 있습니다.
그림 8-59 추가 기계 Y 축(YM)을 사용하는 특수 기계 운동학

프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-254 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 8-60 교차 지점에서의 다양한 홈
프로그래밍
TRACYL(d) ; TRACYL 활성화(개별 블록) TRAFOOF ; 비활성화(개별 블록) d – 원통 가공 직경(mm)
TRAFOOF는 활성 변환 기능을 비활성화합니다.
OFFN 주소 홈 측면에서 프로그램된 경로까지의 거리 일반적으로 홈 중심선이 프로그램됩니다. OFFN은 활성화된 밀링 커터 반경 보정(G41, G42)에 대한 (절반) 홈 너비를 정의합니다. 프로그래밍: OFFN=... ; 거리(mm)
참고: 홈이 완료되고 나서 OFFN=0을 설정하십시오. 또한 OFFN은 G41, G42를 결합한 옵셋 프로그
램래밍용으로 TRACYL 외부에서도 사용됩니다.

프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-255 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 8-61 홈 너비에 OFFN 사용
프로그래밍 참고 사항
TRACYL을 사용하여 밀링하기 위해 홈 중심선이 지정된 좌표가 있는 부품 프로그램에서 프
로그램되고 (절반) 홈 너비가 OFFN으로 프로그램됩니다.
OFFN은 공구 반경 보정을 선택할 때까지 적용되지 않습니다. 또한, 반대 홈 측면에 손상을 주
지 않으려면 OFFN이 공구 반경보다 크거나 같아야 합니다.
홈 밀링 가공 프로그램은 기본적으로 다음과 같은 단계로 구성됩니다.
1. 공구를 선택합니다.
2. TRACYL을 선택합니다.
3. 해당하는 워크 옵셋을 선택합니다.
4. 위지를 지정합니다.
5. OFFN을 프로그램합니다.
6. 공구 반경 보정을 선택합니다.
7. 블록에 접근합니다(TRC 위치 지정 및 홈 너비에 접근).
8. 홈 중심선을 사용하여 홈 방향을 프로그램합니다.
9. 공구 반경 보정의 선택을 취소합니다.
10. 블록을 후진시킵니다(TRC 후진 및 홈 측면으로부터 멀리 이동).
11. 위치를 지정합니다
12. OFFN을 지웁니다.
13. TRAFOOF(TRACYL의 선택 취소).
14. 초기 워크 옵셋을 다시 한 번 선택합니다.
(다음의 프로그램 작성 예제도 참조하십시오.)

프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-256 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
정보
• 홈 가이딩:
정확히 홈 너비에 해당하는 공구 직경을 사용하면 정확한 홈을 생성할 수 있습니다. 이에
대해서는 공구 반경 보정이 활성화되지 않습니다.
TRACYL을 사용하면 홈 너비보다 작은 공구 직경으로도 홈을 가공할 수 있습니다. 이로
인해 공구 반경 보정(G41, GG42)과 OFFN이 사용됩니다.
정확성이 저하되는 문제를 방지하려면 공구 직경이 홈 너비보다 조금만 작아야 합니다.
• 홈 측면 보정을 사용하는 TRACYL의 경우, 보정에 사용되는 축(YM)이 선반에 있어야 합니
다. 따라서, 홈이 프로그램된 홈 중심선에서 가운데 생성됩니다.
• 공구 반경 보정(TRC) 선택:
TRC는 프로그램된 홈 중심선에 적용됩니다. 이로 인해 홈 측면이 생성됩니다. 공구가 홈
측면의 왼쪽으로(홈 중심선의 오른쪽으로) 이송하도록 G42가 입력됩니다. 따라서, G41은
홈 측면의 오른쪽(홈 중심선의 왼쪽)에 작성되어야 합니다.
G41-G42 간 전환 방법으로, OFFN에서 음수 부호를 붙여서 홈 너비를 입력할 수 있습니다.
• TRACYL을 사용하지 않더라도 TRC가 활성화된 경우 OFFN이 포함되어 있으므로 OFFN
이 TRAFOOF 이후에 0으로 재설정되어야 합니다. TRACYL을 사용하지 않을 때와
TRACYL을 사용할 때 OFFN이 다르게 작동합니다.
• 부품 프로그램 안에서 OFFN을 변경할 수 있습니다. 따라서 중심으로부터 실제 홈 중심선
을 옵셋 지정할 수 있습니다.
참조: “공구 보정에 대한 특수 처리” 절의 기능 설명
프로그램 예제
훅 모양의 홈 만들기
그림 8-62 홈 만들기(예)

프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-257 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 8-63 홈 프로그래밍, 홈 밑면의 값
; 홈 밑면에서 실린더의 가공 직경: 35.0 mm
; 원하는 홈 총 너비: 24.8 mm, 사용 중인 밀링 커터의 반경:
10.123 mm
N10 T1 F400 G94 G54 ; 밀링 커터 공구, 피드, 피드 유형, 워크 옵셋 보정
N30 G0 X25 Z50 SPOS=200 ; 시작 위치에 접근
N35 SETMS(2) ; 마스터 스핀들이 현재 밀링 스핀들임
N40 TRACYL (35.0) ; TRACYL 활성화, 가공 직경 35.0mm
N50 G55 G19 ; 워크 옵셋 보정, 평면 선택: Y/Z 평면
N60 S800 M3 ; 밀링 스핀들 활성화
N70 G0 Y70 Z10 ; 시작 위치 Y/Z
N80 G1 X17.5 ; 밀리 커터를 홈 밑면으로 절입
N70 OFFN=12.4 ; 홈 측면에서 슬롯 중심선까지의 거리 12.4mm
N90 G1 Y70 Z1 G42 ; TRC 활성화, 홈 측면에 접근
N100 Z-30 ; 원통 축에 평행하게 홈 선택
N110 Y20 ; 주변에 평행하게 홈 선택
N120 G42 G1 Y20 Z-30 ; TRC 재시작, 반대쪽 홈 측면에 접근
; 홈 측면에서 홈 중심선까지의 거리가 12.4mm로 유지됨
N130 Y70 F600 ; 주변에 평행하게 홈 선택
N140 Z1 ; 원통 축에 평행하게 홈 선택
N150 Y70 Z10 G40 ; TRC 비활성화
N160 G0 X25 ; 커터 후진
N170 M5 OFFN=0 ; 밀링 스핀들 비활성화, 홈 측면 거리 삭제
N180 TRAFOOF ; TRACYL 비활성화
N190 SETMS ; 다시 마스터 스핀들이 기본 스핀들이 됨
N200 G54 G18 G0 X25 Z50 SPOS=200 ; 시작 위치에 접근
N210 M2

프로그래밍
8.14 선삭 가공 기계에서의 밀링
8-258 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
메모

9-259 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
싸이클
9.1 싸이클 개요
싸이클은 태핑과 같은 특수한 절삭 가공을 수행하는 데 사용할 수 있는 일반적인 기술적 서브
루틴을 가리킵니다. 파라메타를 지정하여 이러한 싸이클을 개별 작업에 적용할 수 있습니다.
여기에서 설명하는 싸이클은 SINUMERIK 840D/810D에 제공되는 싸이클과 동일합니다.
드릴링 싸이클과 선삭 가공 싸이클
SINUMERIK 802D sl 제어 시스템을 사용하여 다음과 같은 표준 싸이클을 수행할 수 있습니다.
• 드릴링 싸이클
CYCLE81 드릴링, 센터링
CYCLE82 드릴링, 카운터보링
CYCLE83 심공 드릴링
CYCLE84 리지드 태핑
CYCLE84 보정 척을 사용한 태핑
CYCLE85 리밍 1(보링 1)
CYCLE86 보링(보링 2)
CYCLE87 정지 1을 사용한 드릴링(보링 3)
CYCLE87 정지 2를 사용한 드릴링(보링 4)
CYCLE85 리밍 2(보링 5)
HOLES1 여러 구멍으로 이루어진 행
HOLES2 여러 구멍으로 이루어진 원
SINUMERIK 840D를 사용한 보링 싸이클 CYCLE85 ... CYCLE89를 보링 1 ... 보링 5라고 하지만 그 기능은 동일합니다.
• 선삭 가공 싸이클
CYCLE93 홈
CYCLE94 언더컷(DIN에 대한 형태 E 및 F)
CYCLE95 릴리프 절삭
CYCLE96 나사 언더컷
CYCLE97 나사 가공
9

싸이클
9.2 싸이클 프로그래밍
9-260 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
CYCLE98 나사 체인
이러한 싸이클은 툴-박스와 함께 공급됩니다. 싸이클은 시스템 스타트업 시 RS232 인터페이
스를 통해 가공 프로그램 메모리로 로드됩니다.
싸이클 서브루틴
싸이클 패키지에 다음과 같은 보조 서브루틴이 포함됩니다.
• cyclest.spf
• steigung.spf
• meldung.spf
이러한 서브루틴도 항상 시스템으로 로드됩니다.
9.2 싸이클 프로그래밍
표준 싸이클이 이름 및 파라메타 목록이 있는 서브루틴으로 정의됩니다.
호출 및 반환 조건
싸이클 호출 이전부터 사용중이던 G 기능과 프로그램 가능한 옵셋은 싸이클이 끝나도 그대로 적용됩니다.
가공 평면 G17(드릴링 싸이클의 경우)과 G18(선삭 가공 싸이클의 경우)은 싸이클을 호출하
기 전에 정의됩니다.
드릴링 싸이클에서 가공 작업은 유동 평면과 수직을 이루는 축에서 수행됩니다.
싸이클 실행 도중 출력되는 메시지
여러 싸이클 중에 프로그램을 실행하는 동안 가공 상태를 나타내는 메시지가 제어 시스템 화면에 표시됩니다.
표시된 메시지로 인해 프로그램의 실행이 중단되지 않으며 다음 메시지가 나타날 때까지 계속 표시되어 있습니다.
메시지 텍스트 및 의미가 해당되는 싸이클과 함께 나열됩니다.
모든 관련 메시지가 9.4 절에 요약되어 있습니다.
싸이클 실행 중 블록 표시
싸이클을 실행하는 동안 현재 블록 화면에 싸이클 호출이 표시됩니다.
싸이클 호출 및 파라메타 목록
싸이클을 정의하는 파라메타는 싸이클을 호출할 때 파라메타 목록을 통해 전송될 수 있습니다.

싸이클
9.2 싸이클 프로그래밍
9-261 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
참고
싸이클 호출은 반드시 별도 블록으로 프로그램해야 합니다.
표준 싸이클 파라메타의 지정에 관한 기본 지침
프로그램 설명서에서 다음을 사용하여 모든 싸이클의 파라메타 목록을 설명합니다.
• 순서
• 유형
반드시 정의 순서에 따라 파라메타를 정의해야 합니다.
싸이클을 정의하는 각 파라메타마다 특정 데이터 유형을 가지고 있습니다. 사용되는 파라메
타는 싸이클을 호출할 때 지정해야 합니다. 파라메타 목록에서 다음을 전송할 수 있습니다
• R 파라메타(숫자 값만 해당됨)
• 상수
파라메타 목록에서 R 파라메타를 사용하는 경우 먼저 이러한 파라메타가 호출하는 프로그램
에서 할당된 값이어야 합니다. 다음과 같은 방법으로 싸이클을 호출할 수 있습니다.
• 불완전한 파라메타 목록을 사용하여 호출
또는
• 파라메타를 지정하지 않고 호출
파라메타 목록 긑에서 전달 파라메타를 생략한 경우 조기에 “)”를 사용하여 파라메타 목록을
종료해야 합니다. 목록에서 생략된 파라메타가 있으면 쉼표 “..., ,...”를 위치 구분자로 사용해
야 합니다.
싸이클에 대해 에러 응답이 특별히 설명된 경우를 제외하고 제한된 값 범위의 파라메타 값에
대해서는 가능성 확인을 수행하지 않습니다.
싸이클을 호출할 때 싸이클에 정의된 파라메타보다 많은 항목이 파라메타 목록에 있는 경우,
일반적인 NC 알람 12340 “Too many parameters(파라메타가 너무 많음)”가 표시되고 싸이클
은 실행되지 않습니다.
싸이클 호출
개별 싸이클에 제공되는 프로그램 작성 예에서 각각의 싸이클 작성 방법을 볼 수 있습니다.
싸이클 시뮬레이션
싸이클 호출을 사용하는 프로그램을 시뮬레이션으로 먼저 테스트할 수 있습니다.
시뮬레이션 동안 싸이클의 이송이 화면에 그래픽으로 표시됩니다.

싸이클
9.3 프로그램 편집기에서 그래픽 싸이클 지원
9-262 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.3 프로그램 편집기에서 그래픽 싸이클 지원
시스템의 프로그램 편집기가 프로그램에 싸이클 호출을 추가하고 파라메타를 입력하는 데 필요한 프로그램을 지원합니다.
기능
싸이클 지원은 다음 세 가지 요소로 구성됩니다.
1. 싸이클 선택
2. 파라메타 지정에 사용되는 입력 화면
3. 싸이클당 도움말 화면
필요한 파일 개요
다음 파일은 싸이클 지원을 위한 기본 파일입니다.
• sc.com
• cov.com
참고
이러한 파일은 제어 시스템 스타트업 시 로드되며 항상 로드된 상태로 있어야 합니다.
싸이클 지원 조작
프로그램에 싸이클 호출을 추가하려면 다음 단계를 차례대로 수행합니다.
• 기존 소프트 키 “드릴가공” 및 “선반 가공”을 사용하면 가로 소프트 키 표시줄에서 개별 싸이
클의 선택 막대로 이동할 수 있습니다.
• 해당하는 입력 화면이 도움말과 함께 화면에 표시될 때까지 수평 소프트를 사용하여 싸이
클 선택을 수행합니다.
• 직접적으로(숫자 값) 또는 간접적으로(R27 등의 R 파라메타 또는 R27+10과 같이 R 파라
메타로 구성된 표현식) 값을 입력할 수 있습니다.
숫자 값을 입력한 경우 허용 범위에 있는 값인지 확인하는 검사가 수행됩니다.
• 몇 가지 값만 허용되는 일부 파라메타는 전환 키를 사용하여 선택합니다.
• 드릴링 싸이클에서는 세로줄의 “모달 호출” 소프트 키를 사용하여 싸이클을 모달식으로 호
출할 수 있습니다.
모달식 호출은 드릴링 싸이클 목록 상자에서 “모달 해제”를 통해 선택합니다.
• 입력을 완료하려면 “OK”를 누릅니다. 에러가 발생하면 “취소”를 누릅니다.

싸이클
9.3 프로그램 편집기에서 그래픽 싸이클 지원
9-263 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
재컴파일
프로그램 코드를 재컴파일함으로써 싸이클 지원을 통해 기존 프로그램을 수정할 수 있습니다.
수정할 줄에 커서를 놓고 “재컴파일” 소프트 키를 선택합니다.
그러면 해당 프로그램 구간을 작성했던 입력 화면이 다시 열립니다. 이 화면에서 값을 수정하
여 적용할 수 있습니다.

싸이클
9.4 드릴링 싸이클
9-264 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.4 드릴링 싸이클
9.4.1 일반 드릴링 싸이클은 DIN 66025에 따라 정의되는 드릴링, 보링, 태핑 등의 동작 순입니다.
정의된 이름과 파라메타 목록이 있는 서브루틴 형태로 싸이클이 호출됩니다.
모든 가공 싸이클이 서로 다른 기술적 절차를 따르고, 따라서 파라메타 지정이 달라집니다.
드릴링 싸이클에 모달이 적용될 수 있습니다. 즉, 이동 명령이 들어 있는 각 블록의 끝에서 실행됩니다(8.1.6절 또는 9.3절 참조).
파라메타에는 두 가지 유형이 있습니다.
• 형상 파라메타
• 가공 파라메타
형상 파라메타는 모든 드릴링 싸이클에서 동일합니다. 기준 평면과 후진 평면, 안전 여유, 절대적 또는 상대적 최종 드릴링 깊이를 정의합니다. 형상 파라메타는 맨 처음 드릴링 싸이클 CYCLE82 동안 한 번 할당됩니다.
가공 파라메타는 개별 싸이클마다 다른 의미와 결과를 갖습니다. 따라서 싸이클마다 별로도 프로그램합니다.
그림 9-1
안전 여유
최종 드릴링 깊이
기준 평면
후퇴 평면
형상 파라메타

싸이클
9.4 드릴링 싸이클
9-265 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.2 요구 사항
호출 및 반환 조건
드릴링 싸이클은 실제 축 이름과 관계없이 프로그램됩니다. 드릴링 위치는 싸이클을 호출하
기 전에 더 높은 수준 프로그램에서 접근되어야 합니다.
피드, 스핀들 속도, 스핀들의 회전 방향에 대한 값을 정의하는 파라메타가 드릴링 싸이클에 없으면 가공 프로그램에 필요한 값을 프로그램해야 합니다.
싸이클이 호출되기 전에 활성인 G 기능 및 현재 데이터 레코드는 싸이클이 끝나도 그대로 적용됩니다.
평면 정의
드릴링 싸이클의 경우, 일반적으로 가공 작업이 수행될 유동 공작물 좌표계는 평면 G17을 선택하고 프로그램 가능한 옵셋을 적용하여 정의된다고 간주합니다. 이 좌표계에서 유동 평면
에 수직인 축이 항상 드릴링 축입니다.
싸이클을 호출하기 전에 공구 길이 보정을 선택해야 합니다. 결과는 선택한 평면에 항상 수직
이며 싸이클이 끝난 후에도 활성으로 유지됩니다.
따라서 선삭 가공에서 드릴링 축은 Z 축입니다. 드릴링은 공작물의 끝면에 수행됩니다.
그림 9-2
드웰 시간 프로그램
드릴링 싸이클에서 드웰 시간에 대한 파라메타는 항상 F 단어로 지정되므로 초 단위로 값을 지정해야 합니다. 이 절차에서 벗어나는 사항은 반드시 명시해야 합니다.
Length compensation
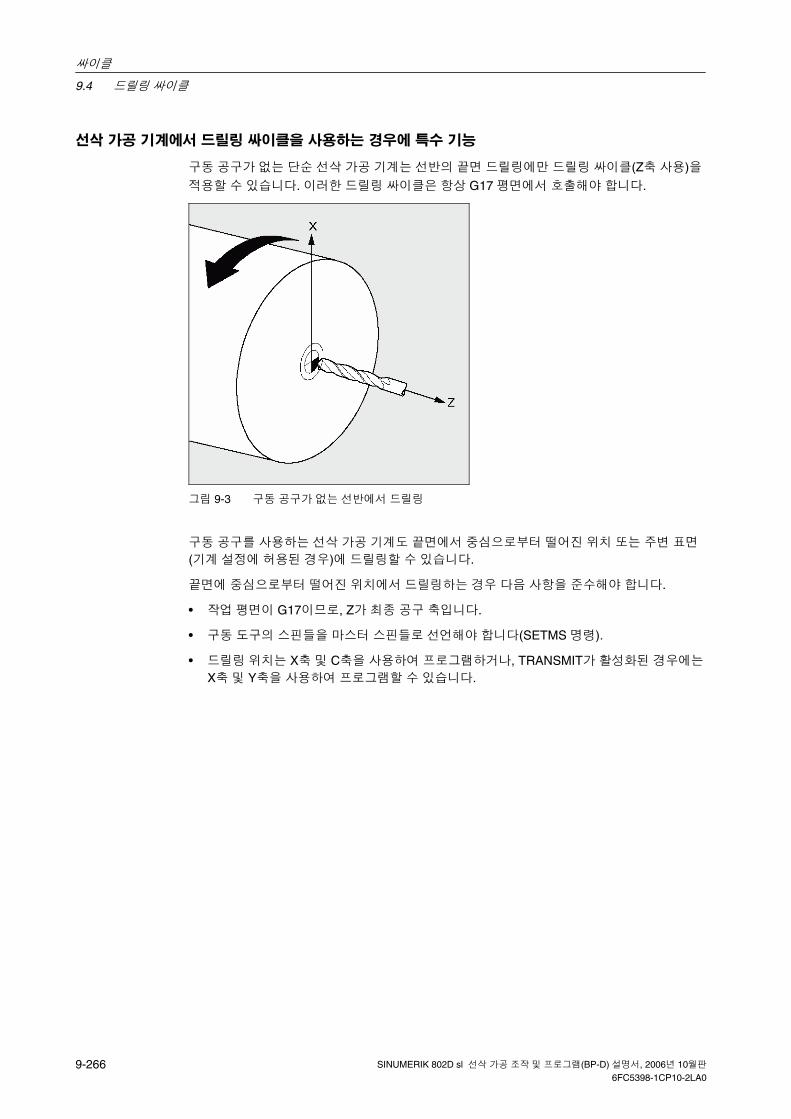
싸이클
9.4 드릴링 싸이클
9-266 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
선삭 가공 기계에서 드릴링 싸이클을 사용하는 경우에 특수 기능
구동 공구가 없는 단순 선삭 가공 기계는 선반의 끝면 드릴링에만 드릴링 싸이클(Z축 사용)을
적용할 수 있습니다. 이러한 드릴링 싸이클은 항상 G17 평면에서 호출해야 합니다.
그림 9-3 구동 공구가 없는 선반에서 드릴링
구동 공구를 사용하는 선삭 가공 기계도 끝면에서 중심으로부터 떨어진 위치 또는 주변 표면
(기계 설정에 허용된 경우)에 드릴링할 수 있습니다.
끝면에 중심으로부터 떨어진 위치에서 드릴링하는 경우 다음 사항을 준수해야 합니다.
• 작업 평면이 G17이므로, Z가 최종 공구 축입니다.
• 구동 도구의 스핀들을 마스터 스핀들로 선언해야 합니다(SETMS 명령).
• 드릴링 위치는 X축 및 C축을 사용하여 프로그램하거나, TRANSMIT가 활성화된 경우에는 X축 및 Y축을 사용하여 프로그램할 수 있습니다.

싸이클
9.4 드릴링 싸이클
9-267 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 9-4 구동 도구를 사용하여 끝면에서 드릴링
주변 표면에서 드릴링하는 경우 다음 사항을 준수해야 합니다.
• 작업 평면이 G19이므로, X가 최종 공구 축입니다.
• 구동 도구의 스핀들을 마스터 스핀들로 선언해야 합니다(SETMS 명령).
• 드릴링 위치는 Z축 및 C축을 사용하여 프로그램하거나, TRACYL이 활성화된 경우에는 X축 및 Z축을 사용하여 프로그램할 수 있습니다.
그림 9-5 구동 도구를 사용하여 주변 표면에서 드릴링

싸이클
9.4 드릴링 싸이클
9-268 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.4.3 드릴링, 센터링 – CYCLE81
프로그래밍
CYCLE81(RTP, RFP, SDIS, DP, DPR)
표 9-1 CYCLE81 파라메타
RTP real 후퇴 평면 (절대)
RFP real 기준 평면 (절대)
SDIS real 안전 여유 (부호 없이 입력)
DP real 최종 드릴링 깊이 (절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이 (부호 없이 입력)
기능
공구가 프로그램된 스핀들 속도 및 피드로 입력된 최종 드릴링 깊이까지 천공합니다.
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• 호출하는 프로그램에 지정된 피드(G1)로 최종 드릴링 깊이로 이동
• G0을 사용하여 후진 평면으로 후진
파라메타에 대한 설명
RFP 및 RTP(기준 평면 및 후퇴 평면)
정상적으로는 기준 평면(RFP)과 반환 평면(RTP)의 값이 서로 다릅니다. 싸이클에서 후진 평
면은 기준 평면 앞쪽에 있는 것으로 간주합니다. 즉, 후진 평면부터 최종 드릴링 깊이까지의
거리는 기준 평면부터 최종 드릴링 깊이까지의 거리보다 큽니다.
SDIS(안전 여유)
안전 여유(SDIS)는 기준 평면의 기준 역할을 합니다. 안전 여유만큼 앞쪽으로 기준 평면이 이동합니다. 안전 여유가 작용하는 방향은 싸이클에 의해 자동으로 결정됩니다.

싸이클
9.4 드릴링 싸이클
9-269 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
DP 및 DPR(최종 드릴링 깊이)
최종 드릴링 깊이는 기준 평면에 대한 상대(DPR) 또는 절대(DP) 값으로 지정할 수 있습니다.
상대 값 지정을 사용할 경우, 싸이클이 기준 평면과 후진 평면의 위치를 이용하여 결과 깊이를
자동으로 계산합니다.
그림 9-6
참고
DP와 DPR 모두에 값을 입력할 경우 최종 드릴링 깊이는 DPR로부터 나옵니다. 그 값이 DP를
통해 프로그램된 절대 깊이와 다르면 메시지 “깊이: 상대 깊이 값에 해당함”이 메시지 줄에 출력됩니다.
기준 평면과 후진 평면의 값이 동일할 때는 상대 깊이 지정이 허용되지 않습니다. 에러 메시지
61101 “기준 평면이 잘못 정의됨”이 출력되고 싸이클이 실행되지 않습니다. 후진 평면이 기준
평면 뒤에 있을 경우, 즉 후진 평면에서 최종 드릴링 깊이까지가 더 짧을 경우에도 이 에러 메시지가 출력됩니다.

싸이클
9.4 드릴링 싸이클
9-270 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 작성 예제: Drilling_centering
이 프로그램은 CYCLE81 드릴링 싸이클을 사용하여 선반의 끝면에서 구멍 1개를 생성합니다.
드릴링 축은 항상 Z 축입니다.
그림 9-7
N10 G0 G17 G90 F200 S300 M3 기술적 값 지정
N20 T3 D1 공구 변경
N30 M6
N40 Z10 후진 평면에 접근 N50 X0 드릴링 위치에 접근 N60 CYCLE81(10, 0, 2, -35,) 싸이클 호출
N70 G0 Z100 Z축에서 후진 N100 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-271 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.4 드릴링, 카운터보링 – CYCLE82- CYCLE82
프로그래밍
CYCLE82(RTP, RFP, SDIS, DP, DPR, DTB)
파라메타
표 9-2 CYCLE82 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 여유(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이(부호 없이 입력)
DTB real 최종 드릴링 깊이에서 드웰 시간(칩 분쇄)
기능
공구가 프로그램된 스핀들 속도 및 피드로 입력된 최종 드릴링 깊이까지 천공합니다. 최종 드릴링 깊이에 도달했을 때 드웰 시간이 경과될 수도 있습니다.
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• 싸이클 호출 전에 프로그램된 피드(G1)로 최종 드릴링 깊이로 이동
• 드릴링 깊이에서 드웰 시간
• G0을 사용하여 후진 평면으로 후진
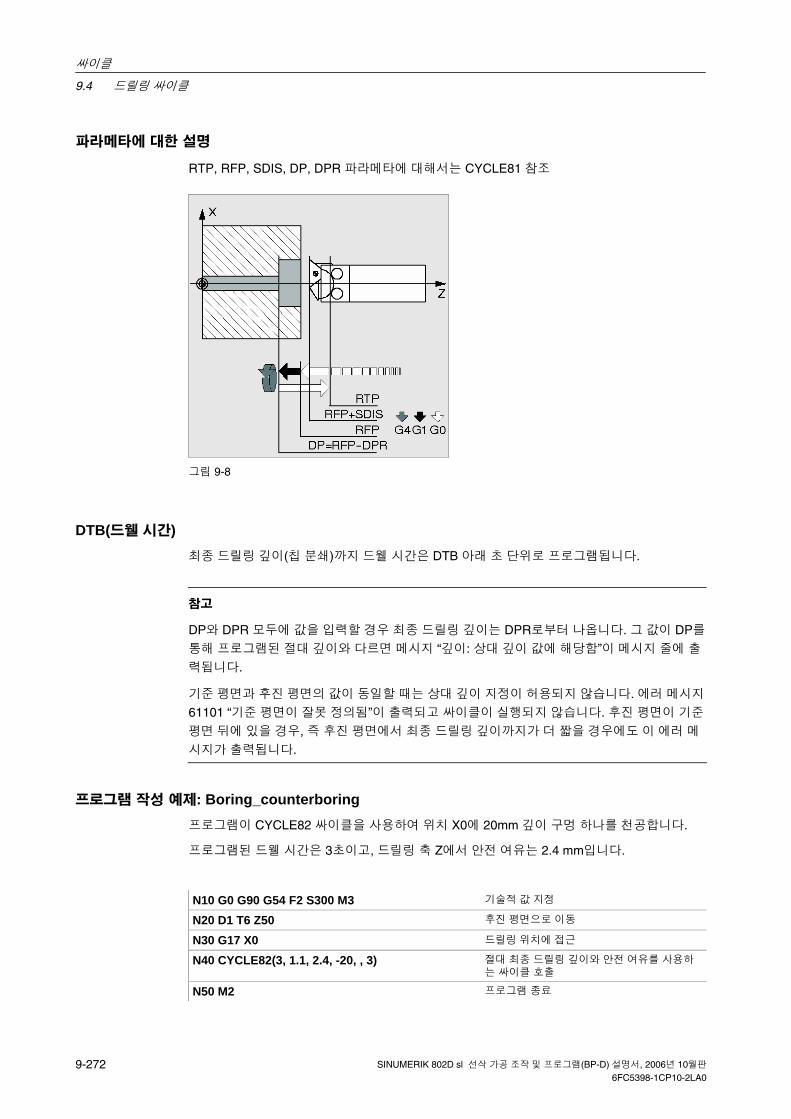
싸이클
9.4 드릴링 싸이클
9-272 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
그림 9-8
DTB(드웰 시간) 최종 드릴링 깊이(칩 분쇄)까지 드웰 시간은 DTB 아래 초 단위로 프로그램됩니다.
참고
DP와 DPR 모두에 값을 입력할 경우 최종 드릴링 깊이는 DPR로부터 나옵니다. 그 값이 DP를
통해 프로그램된 절대 깊이와 다르면 메시지 “깊이: 상대 깊이 값에 해당함”이 메시지 줄에 출
력됩니다.
기준 평면과 후진 평면의 값이 동일할 때는 상대 깊이 지정이 허용되지 않습니다. 에러 메시지
61101 “기준 평면이 잘못 정의됨”이 출력되고 싸이클이 실행되지 않습니다. 후진 평면이 기준
평면 뒤에 있을 경우, 즉 후진 평면에서 최종 드릴링 깊이까지가 더 짧을 경우에도 이 에러 메
시지가 출력됩니다.
프로그램 작성 예제: Boring_counterboring
프로그램이 CYCLE82 싸이클을 사용하여 위치 X0에 20mm 깊이 구멍 하나를 천공합니다.
프로그램된 드웰 시간은 3초이고, 드릴링 축 Z에서 안전 여유는 2.4 mm입니다.
N10 G0 G90 G54 F2 S300 M3 기술적 값 지정
N20 D1 T6 Z50 후진 평면으로 이동
N30 G17 X0 드릴링 위치에 접근 N40 CYCLE82(3, 1.1, 2.4, -20, , 3) 절대 최종 드릴링 깊이와 안전 여유를 사용하
는 싸이클 호출
N50 M2 프로그램 종료
싸이클
9.4 드릴링 싸이클
9-273 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.5 심공 드릴링 – CYCLE83 프로그래밍
CYCLE83(RTP, RFP, SDIS, DP, DPR, FDEP, FDPR, DAM, DTB, DTS, FRF, VARI)
파라메타
표 9-3 CYCLE83 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 여유(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이(부호 없이 입력)
FDEP real 첫 번째 드릴링 깊이(절대)
FDPR real 기준 평면에 대한 상대적 첫 번째 드릴링 깊이(부호 없이 입력)
DAM real 하강 거리(부호 없이 입력)
DTB real 최종 드릴링 깊이에서 드웰 시간(칩 분쇄)
DTS real 시작점에서 드웰 시간과 칩 제거를 위한 드웰 시간
FRF real 첫 번째 드릴링 깊이의 피드 팩터(부호 없이 입력) 값의 범위: 0.001 ... 1
VARI int 가공 유형: 칩 분쇄=0 칩 제거=1
기능
공구가 프로그램된 스핀들 속도 및 피드로 입력된 최종 드릴링 깊이까지 천공합니다.
심공 드릴링은 여러 번 실행되는 최대 정의 가능한 전진 깊이에서 시작하여 최종 깊이에 도달
할 때까지 서서히 증가시키면서 실행됩니다.
드릴을 매 전진 깊이 후 칩 제거를 위해 기준 평면과 안전 여유를 더한 길이를 후진하거나 매번 칩 분쇄를 위해 1mm씩 후진할 수 있습니다.
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.

싸이클
9.4 드릴링 싸이클
9-274 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
싸이클이 다음과 같은 일련의 동작을 생성합니다.
칩 제거를 사용한 심공 드릴링(VARI=1):
• G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• FRF(피드 팩터) 파라메타가 적용되는 프로그램 호출을 통해 정의된 피드에서 비롯되는 이
송 속도인 G1을 사용하여 첫 번째 드릴링 깊이로 이동
• 최종 드릴링 깊이에서 드웰 시간(파라메타 DTB)
• G0을 사용하여 칩 제거를 위해 안전 여유만큼 앞으로 이동한 기준 평면으로 후진
• 시작점에서 드웰 시간(파라메타 DTS)
• G0을 사용하여 예상 거리만큼 차감된, 마지막 도달 드릴링 깊이의 접근
• G1을 사용하여 다음 드릴링 깊이로 이동(최종 드릴링 깊이에 도달할 때까지 일련의 연속
동작이 계속됨)
• G0을 사용하여 후진 평면으로 후진
그림 9-9 칩 제거를 사용한 심공 드릴링
칩 분쇄를 사용한 심공 드릴링(VARI=0):
• G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• FRF(피드 팩터) 파라메타가 적용되는 프로그램 호출을 통해 정의된 피드에서 비롯되는 이
송 속도인 G1을 사용하여 첫 번째 드릴링 깊이로 이동
• 최종 드릴링 깊이에서 드웰 시간(파라메타 DTB)
• 호출하는 프로그램에 프로그램된 피드와 G1을 사용하여 유동 드릴링 깊이로부터 1mm 후
진(칩 분쇄 용도)
• G1과 프로그램된 피드를 사용하여 다음 드릴링 깊이로 이동(최종 드릴링 깊이에 도달할
때까지 일련의 연속 동작이 계속됨)
• G0을 사용하여 후진 평면으로 후진

싸이클
9.4 드릴링 싸이클
9-275 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 9-10 칩 분쇄를 사용한 심공 드릴링
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
DP(또는 DPR), FDEP(또는 FDPR) 및 DMA 파라메타 사이의 상관 관계 싸이클에서 최종 드릴링 깊이, 첫 번째 드릴링 깊이 및 하강 거리을 기초로 하여 다음과 같이 중간 드릴링 깊이를 계산합니다.
• 1단계에서 첫 번째 드릴링 깊이를 통해 파라메타로 지정한 깊이가 총 드릴링 깊이를 초과
하지 않는 한 그 깊이로 이동됩니다.
• 둘째 드릴링 깊이부터는 마지막 드릴링 깊이의 스트로크로부터 하강 거리를 차감하여 드릴링 스트로크를 계산합니다. 단, 마지막 드릴링 깊이 스트로크가 프로그램된 하강 거리보
다 크다는 것을 조건으로 합니다.
• 남아 있는 깊이가 하강 거리의 두 배보다 큰 동안에는 다음 드릴링 스트로크가 하강 거리
에 해당합니다.
• 마지막 두 번의 드릴링 스트로크는 동일하게 이분되어 이동하기 때문에 항상 하강 거리의 절반보다 큽니다.
• 첫 번째 드릴링 깊이가 총 깊이에 맞지 않는 값으로 지정된 경우 에러 메시지 61107 “첫 번째 드릴링 깊이가 잘못 정의됨”이 출력되고 싸이클이 실행되지 않습니다.
싸이클에서 FDPR 파라메타는 DPR 파라메타와 동일한 결과를 갖습니다. 기준 평면과 후진 평면의 값이 동일할 경우 첫 번째 드릴링 깊이를 상대 값으로 정의할 수 있습니다.
첫 번째 드릴링 깊이를 최종 드릴링 깊이보다 크게 프로그램하는 경우 절대 최종 드릴링 깊이
를 초과할 수 없습니다. 한 번의 드릴링으로 최종 드릴링 깊이에 도달하면 싸이클이 자동으로 첫 번째 드릴링 깊이를 감소시킵니다.
DTB(드웰 시간) 최종 드릴링 깊이(칩 분쇄)까지 드웰 시간은 DTB 아래 초 단위로 프로그램됩니다.

싸이클
9.4 드릴링 싸이클
9-276 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
DTS(드웰 시간)
시작점에서의 드웰 시간은 VARI=1(칩 제거)일 경우에만 수행됩니다.
FRF(피드 팩터) 이 파라메타를 사용하면, 싸이클의 첫 번째 드릴링 깊이에 접근하는 데만 적용되는 활성 피드
에 대한 감소 팩터를 입력할 수 있습니다.
VARI(가공 유형) 파라메타 VARI=0을 설정하면 각 드릴 깊이에 도달한 후 칩 분쇄를 위해 드릴이 1mm 후진합
니다. VARI=1(칩 제거 사용)인 경우, 매번 안전 여유만큼 이동되는 기준 평면으로 드릴이 이동합니다.
참고
예상 거리는 다음과 같이 싸이클에서 내부적으로 계산됩니다.
• 드릴링 깊이가 30mm일 때 예상 거리 값은 항상 0.6mm입니다.
• 드릴링 깊이가 긴 경우 깊이 /50 드릴링 공식을 사용합니다(최대값 7mm).
프로그램 작성 예제 - 심공 드릴링
이 프로그램은 위치 X0에서 CYCLE83 싸이클을 실행합니다. 첫 번째 드릴 구멍은 드웰 시간
이 0이고 가공 유형이 칩 분쇄입니다. 최종 드릴링 깊이와 첫 번째 드릴링 깊이는 절대값으로 입력합니다. 드릴링 축은 Z 축입니다. N10 G0 G54 G90 F5 S500 M4 기술적 값 지정
N20 D1 T6 Z50 후진 평면에 접근 N30 G17 X0 드릴링 위치에 접근 N40 CYCLE83(3.3, 0, 0, -80, 0, -10, 0, 0, 0, 0, 1, 0) 싸이클 호출, 절대값을 사용한 깊이 파라메타
N50 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-277 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.6 리지드 태핑 – CYCLE84
프로그래밍
CYCLE84(RTP, RFP, SDIS, DP, DPR, DTB, SDAC, MPIT, PIT, POSS, SST, SST1)
파라메타
표 9-4 CYCLE84 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 여유(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이(부호 없이 입력)
DTB real 나사 깊이에서 드웰 시간(칩 분쇄)
SDAC int 싸이클 종료 후 회전 방향 값: 3, 4 또는 5(M3, M4 또는 M5)
MPIT real 나사 크기를 나타내는 나사 리드(부호 사용): 값의 범위 3(M3) ... 48(M48의 경우). 부호는 나사에서 회전 방향을 결정함«
PST real 하나의 값으로서 나사 리드(부호 있음) 값 범위: 0.001 ... 2000.000mm). 부호는 나사에서 회전 방향을 결정함
POSS real 싸이클에서 지정된 방향으로 스핀들을 정지하기 위한 스핀들 위치(각도)
SST real 태핑 속도
SST1 real 후진 속도
기능
공구가 프로그램된 스핀들 속도와 피드로 입력된 최종 나사 깊이까지 태핑합니다.
CYCLE84를 사용하여 보정 척 없이 태핑된 구멍을 만들 수 있습니다.
참고
보링 작업에 사용할 스핀들이 위치 제어식 스핀들 작업에서 기술적으로 작동할 수 있는 경우
CYCLE84를 사용할 수 있습니다.
보정 척을 사용하는 태핑 작업용으로 별도 싸이클인 CYCLE840이 제공됩니다.

싸이클
9.4 드릴링 싸이클
9-278 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• 지정된 방향으로 스핀들 정지 (POSS 파라메타의 값) 그리고 축 모드로 스핀들 전환
• 최종 드릴링 깊이 및 속도 SST로 태핑
• 나사 깊이에서 드웰 시간(DTB 파라메타)
• SST1 속도 및 방향 반전을 적용하면서 안전 여유만큼 앞으로 이동한 기준 평면으로 후진
• G0을 사용하여 후진 평면으로 후진. 싸이클이 호출되기 전에 활성인 스핀들 속도와 SDAC
아래 프로그램된 회전 방향의 재프로그램을 통해 스핀들 모드가 다시 초기화됩니다.
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
그림 9-11
DTB(드웰 시간) 드웰 시간은 초 단위로 프로그램해야 합니다. 블라인드 구멍을 태핑할 때는 드웰 시간을 생략
하는 것이 좋습니다.
SDAC(싸이클 종료 후 회전 방향)
싸이클 종료 후 스핀들 회전 방향을 SDAC에서 프로그램해야 합니다. 태핑할 때 방향 반전은 싸이클에서 내부적으로 자동으로 수행됩니다.

싸이클
9.4 드릴링 싸이클
9-279 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
MPIT 및 PIT(나사 크기 및 값으로서의 나사 리드) 나사 리드의 값은 나사 크기(M3과 M48 사이의 미터 단위 나사) 또는 값(하나의 나사 회전에서 다음 회전까지의 거리를 나타내는 숫자 값)으로 정의할 수 있습니다. 각 경우에 필요하지 않은 파라메타는 호출에서 생략하거나 값을 0으로 지정할 수 있습니다.
다음과 같이 RH 또는 LH 나사는 리드 파라메타의 부호로 정의됩니다.
• 양수 값 → RH(M3)
• 음수 값 → LH (M4)
두 나사 리드 파라메타 값이 상충하면, 알람 61001 “나사 리드 에러”가 생성되고 싸이클 실행
이 중단됩니다.
POSS(스핀들 위치)
태핑 전 스핀들에서는 스핀들이 싸이클 방향에서 중지되고 SPOS 명령을 사용한 위치 제어로 설정됩니다.
이 스핀들 정지에 대한 스핀들 위치는 POSS 아래 프로그램됩니다.
SST(속도) SST 파라메타에는 태핑 블록에 대한 스핀들 속도가 들어 있습니다.
SST1(후진 속도)
탭핑된 구멍으로부터 후진 속도는 G332를 사용하여 SST1 아래 프로그램됩니다. 이 파라메타 값을 0으로 지정하면 SST 아래 프로그램된 속도로 후진합니다.
참고
싸이클에서 태핑할 때 회전 방향은 항상 자동으로 반전됩니다.
프로그램 작성 예제: 리지드 태핑
리지드 태핑이 위치 X0에서 수행되고, 드릴링 축은 Z 축입니다. 드웰 시간은 프로그램되지 않고, 깊이는 상대 값으로 프로그램됩니다. 회전 방향과 리드에 대한 파라메타에 값을 할당해야 합니다. 미터 단위 나사 M5가 태핑됩니다. N10 G0 G90 G54 T6 D1 기술적 값 지정
N20 G17 X0 Z40 드릴링 위치에 접근 N30 CYCLE84(4, 0, 2, , 30, , 3, 5, , 90, 200, 500) 싸이클 호출. PIT 파라메타가 생략되고, 절대
깊이나 드웰 시간에 값이 입력되지 않고, 스핀
들은 90도에서 정지하며, 태핑 속도는 200, 후
진 속도는 500입니다.
N40 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-280 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.4.7 보정 척을 사용한 태핑 – CYCLE840
프로그래밍
CYCLE840(RTP, RFP, SDIS, DP, DPR, DTB, SDR, SDAC, ENC, MPIT, PIT, AXN)
파라메타
표 9-5 CYCLE840의 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 여유(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이 (부호 없이 입력)
DTB real 나사 깊이에서 드웰 시간(칩 분쇄)
SDR int 후진 시 회전 방향 값: 0(회전 방향의 자동 반전) 3 또는 4(M3 또는 M4)
SDAC int 싸이클 종료 후 회전 방향 값: 3, 4 또는 5(M3, M4 또는 M5)
ENC int 태핑(엔코더를 사용한 태핑/엔코더 없이 태핑) 값: 0 = 엔코더 사용 1 = 엔코더 사용 안 함
MPIT real 나사 크기를 나타내는 나사 리드(부호 사용): 값의 범위 3(M3) ... 48 (M60)
PST real 하나의 값으로서 나사 리드(부호 있음) 값 범위: 0.001 ... 2,000.000 mm
공구 축 AXN 정수
값: 1 = 평면의 첫 번째 축
2 = 평면의 두 번째 축
그렇지 않으면, 평면의 세 번째 축
기능
공구가 프로그램된 스핀들 속도와 피드로 입력된 최종 나사 깊이까지 태핑합니다.
보정 척을 사용하여 태핑 가공하려면 이 싸이클을 사용합니다.
• 엔코더 사용 안 함
• 엔코더 사용

싸이클
9.4 드릴링 싸이클
9-281 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
작업 순서: 엔코더 없이 보정 척을 사용한 태핑
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• 최종 드릴링 깊이로 태핑
• 태핑 깊이에서 드웰 시간(DTB 파라메타)
• 안전 여유만큼 앞으로 이동한 기준 평면으로 후진
• G0을 사용하여 후진 평면으로 후진
그림 9-12
작업 순서: 엔코더와 보정 척을 사용한 태핑
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• 최종 드릴링 깊이로 태핑
• 나사 깊이에서 드웰 시간(DTB 파라메타)
• 안전 여유만큼 앞으로 이동한 기준 평면으로 후진
• G0을 사용하여 후진 평면으로 후진

싸이클
9.4 드릴링 싸이클
9-282 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 9-13
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
DTB(드웰 시간)
드웰 시간은 초 단위로 프로그램해야 합니다. 엔코더를 사용하지 않는 태핑에서만 유효합
니다.
SDR(후진 시 회전 방향) 스핀들 방향을 자동으로 반전하려면 SDR=0을 설정해야 합니다.
설정되는 엔코더가 없도록 머신 데이터를 정의하는 경우(이러한 경우 머신 데이터 MD30200 NUM_ENCS는 0임), 회전 방향 값이 3 또는 4가 되도록 파라메타를 지정해야 합니다. 그렇지 않으면 알람 61202 “스핀들 방향이 프로그램되지 않음”이 출력되고 싸이클 실행이 중단됩니다.
SDAC(회전 방향) 싸이클을 모달로도 호출할 수 있기 때문에(9.3절 참조) 추가 나사 구멍의 태핑 작업에 대한 회전 방향이 필요합니다. 이 값은 SDAC 파라메타에 프로그램되고 상위 수준 프로그램에서 최초 호출 이전에 프로그램된 회전 방향에 해당합니다. SDR=0이면 SDAC에 지정된 값이 싸이
클에서 전혀 의미가 없으므로 파라메타 설정에서 생략할 수 있습니다.

싸이클
9.4 드릴링 싸이클
9-283 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
ENC(태핑) 엔코더가 존재하지만 적용하지 않고 태핑하려는 경우 ENC 파라메타 값을 1로 지정해야 합니다.
하지만 설치된 엔코더가 없는 상태에서 파라메타 값을 0으로 지정하면 싸이클에서 무시됩
니다.
MPIT 및 PIT(나사 크기 및 값으로서의 나사 리드) 엔코더를 사용하여 태핑하는 경우 리드에 대한 파라메타만 해당됩니다. 싸이클이 스핀들 속도 및 리드에서 피드를 계산합니다.
나사 리드의 값은 나사 크기(M3과 M48 사이의 미터 단위 나사) 또는 값(하나의 나사 회전에서 다음 회전까지의 거리를 나타내는 숫자 값)으로 정의할 수 있습니다. 각 경우에 필요하지 않은 파라메타는 호출에서 생략하거나 값을 0으로 지정할 수 있습니다.
두 나사 리드 파라메타 값이 상충하면, 알람 61001 “나사 리드가 잘못됨”이 생성되고 싸이클 실행이 중단됩니다.
기타 참고 사항
머신 데이터 MD30200 NUM_ENCS에 설정된 값에 따라 싸이클이 태핑 작업에 엔코더를 사용하는지 여부를 결정합니다.
스핀들의 회전 방향은 M3 또는 M4를 사용하여 프로그램해야 합니다.
G63을 사용한 나사 블록에서 피드 오버라이드 스위치 및 스핀들 오버라이드 스위치 값은 100%로 강제 고정됩니다.
엔코더를 사용하지 않는 태핑에는 길이가 긴 보정 척이 필요합니다.

싸이클
9.4 드릴링 싸이클
9-284 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
AXN(공구 축) 다음 그림은 드릴링 축 선택 옵션을 보여 줍니다.
G18 사용:
• AXN=1 ; Z에 해당
• AXN=2 ; X에 해당
• AXN=3 ; Y에 해당(Y축이 있는 경우)
그림 9-14
AXN(드릴링 축 번호)을 사용하여 드릴링 축을 프로그램하면 드릴링 축을 직접 프로그램할 수 있습니다.
AXN=1 평면의 첫 번째 축 AXN=2 평면의 두 번째 축 AXN=3 평면의 세 번째 축
예를 들어, G18 평면에서 중심 구멍(Z축)을 가공하려면 다음을 프로그램합니다.
G18
AXN=1

싸이클
9.4 드릴링 싸이클
9-285 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그램 작성 예제: 엔코더를 사용하지 않는 태핑
엔코더 없이 위치 X0에서 태핑이 수행되며, 드릴링 축은 Z 축입니다. 회전 방향에 대한 SDR 및 SDAC 파라메타를 지정해야 합니다. ENC 파라메타 값은 1로 지정하고, 깊이 값은 절대 값입니다. 리드 파라메타 PIT는 생략할 수 있습니다. 가공에 보정 척을 사용합니다.
N10 G90 G0 G54 D1 T6 S500 M3 기술적 값 지정
N20 G17 X0 Z60 드릴링 위치에 접근 N30 G1 F200 경로 이송의 결정
N40 CYCLE840(3, 0, , -15, 0, 1, 4, 3, 1, , ,3) 싸이클 호출, 정지 시간 1초, 후진 시 회전 방
향 M4, 싸이클 종료 후 회전 방향 M3, 안전
여유 없음
MPIT 및 PIT 파라메타 생략됨 N50 M2 프로그램 종료
엔코더를 사용한 태핑 예제
위치 X0에서 엔코더를 사용하는 태핑 작업에 이 프로그램을 사용합니다. 드릴링 축은 Z 축입
니다. 리드 파라메타는 정의해야 하고, 회전 방향의 자동 반전은 프로그램됩니다. 가공에 보정 척을 사용합니다.
N10 G90 G0 G54 D1 T6 S500 M3 기술적 값 지정
N20 G17 X0 Z60 드릴링 위치에 접근 N30 G1 F200 경로 이송의 결정
N40 CYCLE840(3, 0, , -15, 0, 0, , ,0, 3.5, ,3 ) 안전 여유 없이 싸이클 호출
N50 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-286 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.4.8 리밍 1(보링 1) – CYCLE85
프로그래밍
CYCLE85(RTP, RFP, SDIS, DP, DPR, DTB, FFR, RFF)
파라메타
표 9-6 CYCLE85 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 여유(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이(부호 없이 입력)
DTB real 최종 드릴링 깊이에서 드웰 시간(칩 분쇄)
FFR real 피드
RFF real 후진 피드
기능
공구가 프로그램된 스핀들 속도 및 피드 속도로 입력된 최종 드릴링 깊이까지 천공합니다.
FFR과 RFF에 각각 지정된 피드로 안쪽으로 또는 바깥쪽으로 이동합니다.
이 싸이클은 보링 구멍 리밍에 사용할 수 있습니다.

싸이클
9.4 드릴링 싸이클
9-287 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
그림 9-15
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 여유만큼 앞으로 이동한 기준 평면에 접근
• G1을 사용하고 파라메타 FFR 아래 프로그램된 피드로 최종 드릴링 깊이로 이동
• 드릴링 깊이에서 드웰 시간
• RFF 파라메타 아래 정의된 후진 피드로 G1을 사용하여 안전 여유만큼 앞으로 이동한 기
준 평면으로 후진
• G0을 사용하여 후진 평면으로 후진

싸이클
9.4 드릴링 싸이클
9-288 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
그림 9-16
DTB(드웰 시간) 최종 드릴링 깊이까지 드웰 시간은 DTB 아래 초 단위로 프로그램합니다.
FFR(피드) FFR 아래 프로그램된 피드 값이 드릴 가공에 적용됩니다.
RFF(후진 피드) FFR 아래 프로그램된 피드 값이 구멍으로부터 기준 평면에 안전 여유를 더한 거리까지 후진
할 때 적용됩니다.
프로그램 작성 예제: 첫 번째 보링 통과
CYCLE85가 Z70 X0에서 호출됩니다. 드릴링 축은 Z 축입니다. 싸이클 호출에서 최종 드릴링 깊이는 상대 값으로 프로그램되고, 드웰 시간은 프로그램되지 않습니다. 공작물의 상단 에지
는 Z0에 있습니다.
N10 G90 G0 S300 M3
N20 T3 G17 G54 Z70 X0 드릴링 위치에 접근 N30 CYCLE85(10, 2, 2, , 25, , 300, 450) 싸이클 호출, 프로그램된 드웰 시간 없음
N40 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-289 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.9 보링(보링 2) – CYCLE86
프로그래밍
CYCLE86(RTP, RFP, SDIS, DP, DPR, DTB, SDIR, RPA, RPO, RPAP, POSS)
파라메타
표 9-7 CYCLE86 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 공차(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이(부호 없이 입력)
DTB real 최종 드릴링 깊이에서 드웰 시간(칩 분쇄)
SDIR int 회전 방향 값: 3 (M3)
4 (M4)
RPA real 평면 첫 번째 축의 후진 경로(증분, 부호와 함께 입력)
RPO real 평면 두 번째 축의 후진 경로(증분, 부호와 함께 입력)
RPAP real 보링 축의 후진 경로(증분, 부호와 함께 입력)
POSS real 싸이클에서 지정된 방향으로 스핀들을 정지하기 위한 스핀들 위치
(각도)
기능
싸이클이 보링 바를 사용한 구멍 보링을 지원합니다.
공구가 프로그램된 스핀들 속도 및 피드 속도로 입력된 최대 드릴링 깊이까지 천공합니다.
보링 2에서 드릴링 깊이에 도달하면 지정된 방향으로 스핀들 정지가 활성화됩니다. 그런 다음, 프로그램된 후진 위치로 급 이송되고, 다시 후진 평면으로 이동합니다.
G17 평면의 TRANSMIT 및 구동 공구를 사용하는 경우에만 선삭 가공 기계에 CYCLE86을 적용할 수 있습니다(8.14.1절 참조).
이 경우 Z는 공구 축입니다. 드릴링 위치는 싸이클 내부에서 X-Y 평면에 프로그램됩니다.

싸이클
9.4 드릴링 싸이클
9-290 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 공차만큼 앞으로 이동한 기준 평면에 접근
• 호출 프로그램 이전에 프로그램된 피드와 G1을 사용하여 최종 드릴링 깊이로 이동
• 최종 드릴링 깊이까지 드웰 시간
• POSS 아래 프로그램된 스핀들 위치에서 지정된 방향의 스핀들 정지
• G0을 사용하여 최대 3개 축에서 후진 경로
• G0을 사용하여 안전 공차만큼 이동되는 기준 평면으로 보링 축에서 후진
• G0을 사용하여 후진 평면으로 후진(평면의 두 축에 초기 드릴링 위치가 있음)
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
그림 9-17
DTB(드웰 시간) 최종 드릴링 깊이(칩 분쇄)까지 드웰 시간은 DTB 아래 초 단위로 프로그램됩니다.
SDIR(회전 방향) 이 파라메타를 사용하여 싸이클에서 수행되는 보링의 회전 방향을 결정합니다. 3 또는 4(M3/M4) 이외의 값이 생성되면, 알람 61102 “스핀들 방향이 프로그램되지 않음”이 생성되고 싸이클이 실행되지 않습니다.

싸이클
9.4 드릴링 싸이클
9-291 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
RPA(제 1축에서 후진 경로) 이 파라메타를 사용하면 제 1축(가로축)에서 최종 드릴링 깊이에 도달하고 지정된 방향으로 스핀들이 정지한 후 수행되는 후진 이동을 정의할 수 있습니다.
RPO(제 2축에서 후진 경로) 이 파라메타를 사용하면 제 2축에서 최종 드릴링 깊이에 도달하고 지정된 방향으로 스핀들이 정지된 후에 실행되는 후진 이동을 정의할 수 있습니다.
RPAP(보링 축에서 후진 경로) 이 파라메타를 사용하면 드릴링 축에서 최종 드릴링 깊이에 도달하고 지정된 방향의 스핀들 정지가 수행된 후에 실행되는 후진 이동을 정의할 수 있습니다.
POSS(스핀들 위치) POSS를 사용하면 최종 드릴링 깊이에 도달한 후 수행되는 지정된 방향의 스핀들 정지를 위한 스핀들 위치(각도 값)를 프로그램할 수 있습니다.
참고
방향을 지정하여 활성 스핀들을 정지할 수 있습니다. 각도 값은 전송 파라메타를 사용하여 프로그램합니다.
보링 가공에 사용할 스핀들을 위치 제어식 스핀들 작업에 기술적으로 적용할 수 있는 경우 CYCLE86 싸이클을 사용할 수 있습니다.

싸이클
9.4 드릴링 싸이클
9-292 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 작성 예제: 제 2 보링 통과
CYCLE86을 사용하여 X-Y 평면의 끝면에서 X20 Y20 위치에 드릴링합니다. 드릴링 축은 Z 축입니다. 최종 드릴링 깊이가 절대 값으로 프로그램되고, 안전 공차는 지정하지 않습니다. 최종 드릴링 깊이에서 드웰 시간은 2초입니다. 공작물의 상단 에지는 Z10 위치에 있습니다. 싸이클
에서 스핀들은 M3으로 회전하고 45도 위치에서 정지합니다.
그림 9-18
N10 G0 G90 X0 Z100 SPOS=0 시작 위치에 접근 N15 SETMS(2) 밀링 스핀들이 마스터 스핀드로 지정됨 N20 TRANSMIT TRANSMIT 기능 활성화 N35 T10 D1 공구 변경 N40 M6
N50 G17 G0 G90 X20 Y20 드릴링 위치 N60 S800 M3 F500
N70 CYCLE86(112, 110, , 77, 0, 2, 3, -1, -1, 1, 45) 절대 드릴링 깊이를 사용하여 싸이클 호출
N80 G0 Z100
N90 TRAFOOF TRANSMIT 끄기 N95 SETMS 다시 마스터 스핀들이 기본 스핀들이 됨 N200 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-293 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.10 정지 1을 사용한 보링(보링 3) – CYCLE87
프로그래밍
CYCLE87 (RTP, RFP, SDIS, DP, DPR, SDIR)
파라메타
표 9-8 CYCLE87의 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 공차(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이(부호 없이 입력)
SDIR int 회전 방향 값: 3 (M3) 4 (M4)
기능
공구가 프로그램된 스핀들 속도 및 피드로 입력된 최종 드릴링 깊이까지 천공합니다.
보링 3을 수행하는 동안 방향 최종 드릴링 깊이에 도달한 후 방향 M5 없이 스핀들 정지가 생성되고, 뒤이어 프로그램된 정지 M0이 생성됩니다. “NC 시작” 키를 누르면 후진 평면에 도달
할 때까지 급 이송으로 계속 후진합니다.
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 공차만큼 앞으로 이동한 기준 평면에 접근
• 호출 프로그램 이전에 프로그램된 피드와 G1을 사용하여 최종 드릴링 깊이로 이동
• M5를 사용한 스핀들 정지
• <NC 시작> 키를 누릅니다.
• G0을 사용하여 후진 평면으로 후진

싸이클
9.4 드릴링 싸이클
9-294 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
그림 9-19
SDIR(회전 방향)
이 파라메타는 싸이클에서 드릴 가공이 수행되는 회전 방향을 결정합니다.
3 또는 4(M3/M4) 이외의 값이 생성되면, 알람 61102 “스핀들 방향이 프로그램되지 않음”이 생성되고 싸이클이 중단됩니다.
프로그램 작성 예제: 세 번째 보링
CYCLE87이 XY 평면의 X0 위치에서 호출됩니다. 드릴링 축은 Z 축입니다. 최종 드릴링 깊이
가 절대 값으로 지정됩니다. 안전 공차는 2mm입니다.
N20 G0 G17 G90 F200 S300 X0 기술 값 및 드릴링 위치 지정 N30 D3 T3 Z13 후진 평면에 접근 N50 CYCLE87 (13, 10, 2, -7, , 3) 스핀들 회전 방향이 M3으로 프로그램된 싸이클
호출
N60 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-295 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.11 정지 2를 사용한 드릴링(보링 4) – CYCLE88
프로그래밍
CYCLE88(RTP, RFP, SDIS, DP, DPR, DTB, SDIR)
파라메타
표 9-9 CYCLE87 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 공차(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이 (부호 없이 입력)
DTB real 최종 드릴링 깊이에서 드웰 시간(칩 분쇄)
SDIR int 회전 방향 값: 3 (M3) 4 (M4)
기능
공구가 프로그램된 스핀들 속도 및 피드로 입력된 최종 드릴링 깊이까지 천공합니다. 보링 통과 4 동안, 최종 드릴링 깊이에 도달할 때 정지 시간, 회전 M5가 적용된 스핀들 정지, 프로그램
된 정지 M0가 생성됩니다. <NC 시작> 키를 누르면 후진 평면에 도달할 때까지 바깥쪽 방향으
로 계속 급 이송됩니다.
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 공차만큼 앞으로 이동한 기준 평면에 접근
• 호출 프로그램 이전에 프로그램된 피드와 G1을 사용하여 최종 드릴링 깊이로 이동
• 드릴링 깊이에서 드웰 시간
• M5 M0를 사용하여 스핀들 및 프로그램 정지 프로그램 정지 후 <NC 시작> 키를 누릅니다.
• G0을 사용하여 후진 평면으로 후진

싸이클
9.4 드릴링 싸이클
9-296 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
DP = RFP-DPR
RFPRFP+SDIS
RTP
G4 G0 G1
Z
X
M5/M0 그림 9-20
DTB(드웰 시간) 최종 드릴링 깊이(칩 분쇄)까지 드웰 시간은 DTB 아래 초 단위로 프로그램됩니다.
SDIR(회전 방향) 프로그램된 회전 방향은 최종 드릴링 깊이로 이동될 거리에 대해 적용됩니다.
3 또는 4(M3/M4) 이외의 값이 생성되면, 알람 61102 “스핀들 방향이 프로그램되지 않음”이 생성되고 싸이클이 중단됩니다.
프로그램 작성 예제: 네 번째 보링 통과
CYCLE88이 X0에서 호출됩니다. 드릴링 축은 Z 축입니다. 안전 공차는 3mm로 프로그램하
고, 최종 드릴링 깊이는 기준 평면에 대한 상대 값으로 지정합니다. M4가 싸이클에서 적용됩
니다.
N10 G17 G54 G90 F1 S450 M3 T1 기술적 값 지정
N20 G0 X0 Z10 드릴링 위치로 이동
N30 CYCLE88 (5, 2, 3, , 72, 3, 4) 스핀들 회전 방향이 M4로 프로그램된 싸이클 호출
N40 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-297 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.12 리밍 2 (보링 5) – CYCLE89
프로그래밍
CYCLE89 (RTP, RFP, SDIS, DP, DPR, DTB)
파라메타
표 9-10 CYCLE89 파라메타
RTP real 후진 평면(절대)
RFP real 기준 평면(절대)
SDIS real 안전 공차(부호 없이 입력)
DP real 최종 드릴링 깊이(절대)
DPR real 기준 평면에 대한 상대적 최종 드릴링 깊이(부호 없이 입력)
DTB real 최종 드릴링 깊이에서 드웰 시간(칩 분쇄)
기능
공구가 프로그램된 스핀들 속도 및 피드로 입력된 최종 드릴링 깊이까지 천공합니다. 최종 드릴링 깊이에 도달하면 드웰 시간을 프로그램할 수 있습니다.
순서
싸이클 시작 전 도달 위치:
드릴링 위치는 선택한 평면의 두 축에 있는 위치입니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 안전 공차만큼 앞으로 이동한 기준 평면에 접근
• 호출 프로그램 이전에 프로그램된 피드와 G1을 사용하여 최종 드릴링 깊이로 이동
• 최종 드릴링 깊이까지 드웰 시간
• G1 및 동일한 피드 값을 사용하여 안전 공차만큼 앞으로 이동한 기준 평면까지 후진
• G0을 사용하여 후진 평면으로 후진

싸이클
9.4 드릴링 싸이클
9-298 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
파라메타에 대한 설명
RTP, RFP, SDIS, DP, DPR 파라메타에 대해서는 CYCLE81 참조
그림 9-21
DTB(드웰 시간)
최종 드릴링 깊이(칩 분쇄)까지 드웰 시간은 DTB 아래 초 단위로 프로그램됩니다.
프로그램 작성 예제: 5번째 보링
X0에서 5mm의 안전 공차와 절대 값으로 지정되는 최종 드릴링 깊이를 적용하여 CYCLE89 드릴링 싸이클이 호출됩니다. 드릴링 축은 Z 축입니다.
N10 G90 G17 F100 S450 M4 기술적 값 지정
N20 G0 X0 Z107 드릴링 위치로 이동
N30 CYCLE89(107, 102, 5, 72, ,3) 싸이클 호출
N40 M2 프로그램 종료

싸이클
9.4 드릴링 싸이클
9-299 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.4.13 여러 구멍으로 이루어진 행 – HOLES1
프로그래밍
HOLES1 (SPCA, SPCO, STA1, FDIS, DBH, NUM)
파라메타
표 9-11 HOLES1의 파라메타
SPCA real 직선(절대) 상에 있는 기준점 평면(가로 좌표)의 제 1축
SPCO real 이 기준점(절대)에 대한 평면의 제 2축(세로축)
STA1 real 평면의 제 1축(가로축)과 이루는 각도 –180<STA1<=180도
FDIS real 첫 번째 구멍부터 기준점까지 거리(부호 없이 입력)
DBH real 홀 사이의 거리(부호 없이 입력)
NUM int 드릴 구멍 개수
기능
여러 개의 구멍으로 형성된 행, 즉 직선을 따라 여러 개의 구멍 정렬 형태 또는 구멍들로 이뤄
진 격자를 생성할 때 이 싸이클을 사용할 수 있습니다. 드릴 구멍의 유형은 이미 모달로 호출
한 드릴링 구멍 싸이클에 의해 결정됩니다.
G17 평면의 TRANSMIT 및 구동 공구를 사용하는 경우에만 선삭 가공 기계에 HOLE1 구멍 패
턴 싸이클을 적용할 수 있습니다(8.14.1절 참조).
이 경우 Z는 공구 축입니다. 드릴링 위치는 싸이클 내부에서 X-Y 평면에 프로그램됩니다.

싸이클
9.4 드릴링 싸이클
9-300 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
순서
싸이클이 불필요한 이동을 피하기 위해 여러 구멍이 정렬된 행의 가공이 첫 구멍부터 시작되
는지 또는 평면 축의 실제 위치부터 마지막 구멍까지 진행되는지 여부를 계산합니다. 그런 다음 급 이송을 통해 차례로 드릴링 위치로 이동합니다.
그림 9-22
파라메타에 대한 설명
DBH
STA1
FDIS
SPCA
X
Y
SPCO
그림 9-23
SPCA 및 SPCO(평면 제 1축 및 제 2축의 기준점) 여러 개의 구멍이 정렬된 직선 상의 한 점을 구멍 사이의 거리를 지정하기 위한 기준점으로 정의합니다. 이 기준점에서 첫 번째 구멍까지의 거리 FDIS가 정의됩니다.

싸이클
9.4 드릴링 싸이클
9-301 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
STA1(각도) 평면의 어느 위치에든 직선을 정렬할 수 있습니다. 그 위치는 SPCA 및 SPCO에 의해 정의된 점과 사이클이 호출될 때 적용 중인 WCS의 제 1축과 직선 사이의 각도로 지정됩니다. 각도는 STA1 아래 도 값으로 입력합니다.
FDIS 및 DBH(거리) SPCA 및 SPCO 아래 정의된 기준점과 첫 번째 구멍 사이의 거리는 FDIS를 사용하여 정의합
니다. DBH 파라메타에 두 구멍 사이의 거리가 저장됩니다.
NUM(숫자) NUM 파라메타를 사용하여 구멍의 수를 정의합니다.

싸이클
9.4 드릴링 싸이클
9-302 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 작성 예제: 여러 개의 구멍으로 이루어진 행
이 프로그램을 사용하면 회전 부분의 끝면에 있는 4개의 태핑 구멍으로부터 일련의 구멍을 가공할 수 있습니다. 구멍은 X축에 대해 45도 각도를 이루며 기준점이 선반에 있습니다. 첫 번째 구멍 거리는 15mm이며 구멍 간 거리는 10mm입니다.
홀들이 정렬된 행의 형상은 HOLES1 싸이클을 통해 설명합니다. 먼저, CYCLE82를 사용하여 드릴링을 수행한 다음 CYCLE84(보정 척을 사용하지 않고 태핑)를 사용하여 태핑을 수행합니
다. 홀의 깊이(기준 평면과 최종 드릴링 깊이 사이의 거리)는 22 mm입니다.
그림 9-24
N10 G0 G90 X0 Z10 SPOS=0 시작 위치에 접근
N15 SETMS(2) 이제 마스터 스핀들이 현재 밀링 스핀들임
N20 TRANSMIT TRANSMIT 기능 활성화 N25 G17 G90 X0 Y0
N30 F30 S500 M3 기술적 값 지정
N35 T10 D1 드릴 변경 N40 M6
N45 MCALL CYCLE82(10, 0, 2, -22, 0, 1) 모달로 드릴링 싸이클 호출
N50 HOLES1(0, 0, 45, 15, 10, 4) 구멍으로 이루어진 행 싸이클 호출 N55 MCALL 모달식 호출 선택 취소
N60 T11 D1 탭 변경 N65 M6
N70 G90 G0 X0 Z10 Y0 시작 위치에 접근
N75 MCALL CYCLE84(10, 0, 2, -22, 0, , 3, , 4.2, ,300,) 모달로 태핑 싸이클 호출
N80 HOLES1(0, 0, 45, 15, 10, 4) 구멍으로 이루어진 행 싸이클 다시 호출 N85 MCALL 모달식 호출 선택 취소
45 도

싸이클
9.4 드릴링 싸이클
9-303 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
N90 TRAFOOF TRANSMIT 끄기 N95 SETMS 다시 마스터 스핀들이 기본 스핀들이 됨
N200 M2 프로그램 종료
프로그램 작성 예제: 구멍으로 이루어진 격자
이 프로그램은 회전 부분 끝면에 10mm 간격의 5개 구멍에 있는 각 3개 행으로 구성된 구멍 격자를 가공할 수 있습니다. 구멍 격자의 시작점은 X-20 Y-10입니다.
그림 9-25
N10 G0 G90 X0 Z10 SPOS=0 시작 위치에 접근
N15 SETMS(2) 밀링 스핀들이 마스터 스핀드로 지정됨 N20 TRANSMIT TRANSMIT 기능 활성화 N25 G17 G90 X-20 Y-10
N30 F30 S500 M3 기술적 값 지정
N35 T10 D1 드릴 변경 N40 M6
N45 MCALL CYCLE82(10, 0, 2, -22, 0, 1) 모달로 드릴링 싸이클 호출
N50 HOLES1(-20, -10, 0, 0, 10, 5) 1번째 행에 대한 싸이클 호출 N60 HOLES1(-20, 0, 0, 0, 10, 5) 2번째 행에 대한 싸이클 호출 N70 HOLES1(-20, 10, 0, 0, 10, 5) 3번째 행에 대한 싸이클 호출 N80 MCALL 모달식 호출 선택 취소
N90 TRAFOOF TRANSMIT 끄기 N95 SETMS 다시 마스터 스핀들이 기본 스핀들이 됨 N200 M2 프로그램 종료
Starting point x- 20; y -10

싸이클
9.4 드릴링 싸이클
9-304 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.4.14 여러 구멍으로 이루어진 원 – HOLES2
프로그래밍
HOLES2 (CPA, CPO, RAD, STA1, INDA, NUM)
파라메타
표 9-12 HOLES2 파라메타
CPA real 여러 개 구멍으로 이루어진 원의 중심점(절대), 평면의 제 1축
CPO real 구멍으로 이루어진 원의 중심점(절대), 평면의 제 2축
RAD real 여러 개 구멍으로 이루어진 원의 반경(부호 없이 입력)
STA1 real 시작 각도 값 범위: –180<STA1<=180도
INDA real 증분 각도
NUM int 드릴 구멍 개수
기능
이 원을 사용하여 여러 개 구멍으로 이루어진 원을 가공합니다. 싸이클을 호출하기 전에 가공 평면을 정의해야 합니다.
드릴 구멍의 유형은 이미 모달로 호출된 드릴링 싸이클에 의해 결정됩니다.
G17 평면의 TRANSMIT 및 구동 공구를 사용하는 경우에만 선삭 가공 기계에 HOLE2 구멍 패턴 싸이클을 적용할 수 있습니다(8.14.1절 참조).
이 경우 Z는 공구 축입니다. 드릴링 위치는 싸이클 내부에서 X-Y 평면에 프로그램됩니다.
그림 9-26

싸이클
9.4 드릴링 싸이클
9-305 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
순서
싸이클 동안 G0을 사용하여 평면에서 차례로 드릴링 위치로 이동합니다.
그림 9-27
파라메타에 대한 설명
그림 9-28
CPA, CPO 및 RAD(중심점 위치 및 반경) 가공 평면의 점들로 구성되는 원의 위치는 중심점(CPA 및 CPO 파라메타)과 반경(RAD 파라
메타)을 통해 정의됩니다. 반경에는 양수 값만 허용됩니다.
CPA, CPO 중심점
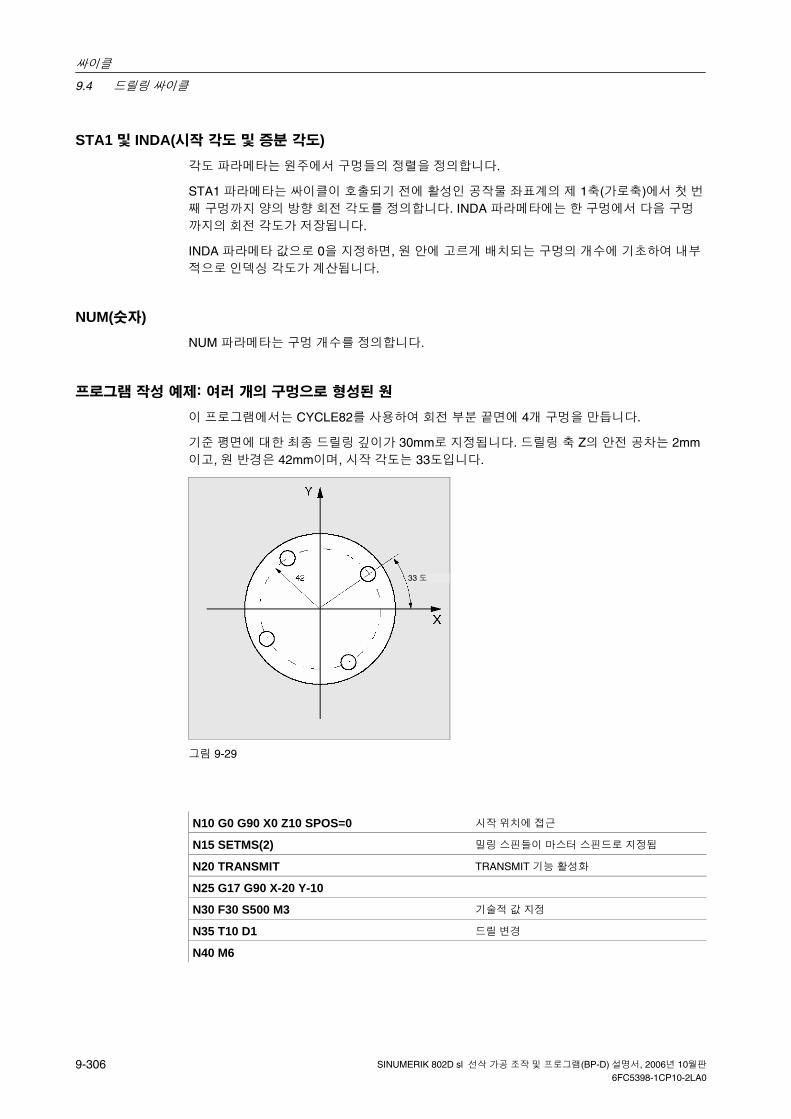
싸이클
9.4 드릴링 싸이클
9-306 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
STA1 및 INDA(시작 각도 및 증분 각도) 각도 파라메타는 원주에서 구멍들의 정렬을 정의합니다.
STA1 파라메타는 싸이클이 호출되기 전에 활성인 공작물 좌표계의 제 1축(가로축)에서 첫 번째 구멍까지 양의 방향 회전 각도를 정의합니다. INDA 파라메타에는 한 구멍에서 다음 구멍
까지의 회전 각도가 저장됩니다.
INDA 파라메타 값으로 0을 지정하면, 원 안에 고르게 배치되는 구멍의 개수에 기초하여 내부
적으로 인덱싱 각도가 계산됩니다.
NUM(숫자) NUM 파라메타는 구멍 개수를 정의합니다.
프로그램 작성 예제: 여러 개의 구멍으로 형성된 원
이 프로그램에서는 CYCLE82를 사용하여 회전 부분 끝면에 4개 구멍을 만듭니다.
기준 평면에 대한 최종 드릴링 깊이가 30mm로 지정됩니다. 드릴링 축 Z의 안전 공차는 2mm이고, 원 반경은 42mm이며, 시작 각도는 33도입니다.
그림 9-29
N10 G0 G90 X0 Z10 SPOS=0 시작 위치에 접근
N15 SETMS(2) 밀링 스핀들이 마스터 스핀드로 지정됨 N20 TRANSMIT TRANSMIT 기능 활성화 N25 G17 G90 X-20 Y-10
N30 F30 S500 M3 기술적 값 지정
N35 T10 D1 드릴 변경 N40 M6
33 도

싸이클
9.4 드릴링 싸이클
9-307 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
N45 MCALL CYCLE82(10, 0, 2, 0, 30, 1) 모달로 드릴링 싸이클 호출
N50 HOLES2(0, 0, 42, 33, 0, 4) 구멍으로 이루어진 원 싸이클 호출 N85 MCALL 모달식 호출 선택 취소
N90 TRAFOOF TRANSMIT 끄기 N95 SETMS 다시 마스터 스핀들이 기본 스핀들이 됨 N200 M2 프로그램 종료

싸이클
9.5 선삭 가공 싸이클
9-308 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.5 선삭 가공 싸이클
9.5.1 요구 사항
제어 시스템의 사용자 메모리로 로드되는 구성 파일 setup_T.cnf에 선삭 가공 싸이클이 포함
됩니다.
호출 및 반환 조건
싸이클 호출 전에 적용되던 G 기능가 싸이클 종료 후에도 계속 적용됩니다.
평면 정의
싸이클이 호출되기 전에 가공 평면을 정의해야 합니다. 선삭 가공에서 일반적인 가공 평면은 G18(ZX 평면)입니다. 선삭 가공에서 유동 평면의 두 축은 다음 세로축(평면의 제 1축)과 가로
축(평면의 제 2축)에서 호출됩니다.
직경 프로그래밍을 사용하는 선삭 가공 싸이클에서, 제 2축은 모든 경우에 가로축으로 간주됩
니다(프로그램 설명서 참조).
그림 9-30
공구 공차각을 기준으로 형상 모니터링
릴리프 절삭이 있는 이송 동작이 발생되는 일정한 선삭 가공 싸이클은 사용 중인 공구의 공차
각을 모니터하여 발생 가능한 형상 편차를 확인합니다. 공구 보정에서 하나의 값으로 공차각
을 입력합니다(DP24 파라메타 아래 D 옵셋). 부호 없이 1도 ~ 90도 사이의 값(0=모니터 안 함)을 공차각으로 지정해야 합니다.

싸이클
9.5 선삭 가공 싸이클
9-309 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 9-31
공구 공차각을 입력할 때 가공 유형이 “수직 가공” 인지 또는 “면 가공” 인지 여부가 영향을 미치는 점에 유의하십시오. 수직 가공과 면 가공에 한 가지 공구를 두루 사용하려는 경우, 공구 공차각이 달라지면 두 가지 공구 보정을 사용해야 합니다.
싸이클이 프로그램된 형상을 선택한 공구로 가공할 수 있는지 여부를 확인합니다.
현재 공구로는 가공이 불가능할 경우 다음 중 하나가 수행됩니다
• 싸이클이 중단되고 에러 메시지가 출력됩니다(스톡 제거).
• 계속해서 형상이 가공되면서 에러 메시지가 출력됩니다(언더컷 싸이클 적용). 이 경우 절삭날 형상에 따라 형상이 결정됩니다.
공구 보정에서 공구 공차각을 0으로 지정하면 형상 모니터링이 수행되지 않습니다d. 자세한 내용은 개별 싸이클을 참조하십시오.
그림 9-32

싸이클
9.5 선삭 가공 싸이클
9-310 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.5.2 홈 – CYCLE93
프로그래밍
CYCLE93(SPD, SPL, WIDG, DIAG, STA1, ANG1, ANG2, RCO1, RCO2, RCI1, RCI2, FAL1, FAL2, IDEP, DTB, VARI, VRT)
파라메타
표 9-13 CYCLE93 파라메타
SPD real 이송 축의 시작점
SPL real 수직축의 시작점
WIDG real 홈 너비(부호 없이 입력)
DIAG real 홈 깊이(부호 없이 입력)
STA1 real 형상과 세로 축 사이 각도 값 범위: 0<=STA1<=180도
ANG1 real 측면각 1: 홈 측면에서 시작점에 의해 결정됨(부호 없이 입력) 값 범위: 0<=ANG1<89.999도
ANG2 real 측면각 2: 반대 측면에서(부호 없이 입력) 값 범위: 0<=ANG2<89.999
RCO1 real 반경/모따기 1, 외경: 측면에서 시작점에 의해 결정됨
RCO2 real 반경/모따기 2, 외경:
RCI1 real 반경/모따기 1, 내경: 시작점 면에서 결정됨
RCI2 real 반경/모따기 2, 내경:
FAL1 real 리세스 베이스에서 정삭 공차
측면 real 측면에서 정삭 공차
IDEP real 절입 깊이(부호 없이 입력)
DTB real 리세스 베이스에서 드웰 시간
VARI int 가공 유형 값 범위: 1...8 및 11...18
_VRT real 형상으로부터의 가변 후진, 증분식(부호 없이 입력)

싸이클
9.5 선삭 가공 싸이클
9-311 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
기능
홈 가공 싸이클을 사용하여 모든 직선 형상 성분에서 수직 및 면 가공에 필요한 대칭형 또는 비대칭형 홈을 가공할 수 있습니다. 외경 및 내경 홈을 모두 가공할 수 있습니다.
순서
절입 깊이(홈 베이스 방향) 및 너비(홈 간격)는 싸이클에서 내부적으로 계산되어 가능한 최대
값으로 동일하게 분배됩니다.
경사면에 홈을 가공할 때 공구는 한 홈에서 다음 홈으로 가장 짧은 경로, 즉 홈이 가공되는 원뿔에 평행인 경로로 이동합니다. 이 과정에서 형상과의 안전 공차가 싸이클에서 내부적으로 계산됩니다.
1 단계
한 번의 절입 작업으로 홈 밑면까지 근축 황삭 가공합니다. 각 절입 후 칩 분쇄를 위해 공구가 후진합니다.
그림 9-33
2 단계
하나 또는 여러 단계에서 전진 방향에 수직으로 홈이 가공됩니다. 여기서 각 단계는 절입 깊이
에 따라 차례로 나뉩니다. 앞쪽 홈 너비를 따라 두 번째 절삭부터 공구가 각 후진 전에 1mm씩 후진합니다.

싸이클
9.5 선삭 가공 싸이클
9-312 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 9-34
3 단계 ANG1 또는 ANG2 아래 각도가 프로그램된 경우 한 단계에서 측면 가공. 측면 너비가 넓은 경우 홈 너비를 따라 들어가는 전진이 여러 단계로 진행됩니다.
그림 9-35

싸이클
9.5 선삭 가공 싸이클
9-313 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
4 단계 에지에서 홈 중앙까지 형상에 평행인 정삭 공차의 스톡 제거. 이 과정에서 싸이클에 의해 자동
으로 공구 반경 보정이 선택 또는 선택 취소됩니다.
그림 9-36
파라메타에 대한 설명
SPD 및 SPL(시작점) 시작점 좌표를 사용하여 싸이클에서 형태가 계산되기 시작하는 홈의 시작점을 정의할 수 있습니다. 싸이클에서 자체적으로 시작점을 결정합니다. 외경 홈의 경우 세로 축 방향으로 이동
하기 시작하며, 내경 홈의 경우 가로 축 방향으로 이동합니다.
형상의 휘어진 성분에 있는 홈은 다른 방법으로 구현할 수 있습니다. 휘어진 형태와 반경에 따라 최대 휨에 근축 직선을 놓거나 홈 에지 점에 접선 경사선을 생성할 수 있습니다.
싸이클에 대해 지정된 직선 상에 해당 모서리 점이 있을 때에만 홈 에지의 반경과 모따기가 휘어진 형상에서 의미를 갖습니다.

싸이클
9.5 선삭 가공 싸이클
9-314 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 9-37
WIDG 및 DIAG(홈 너비 및 홈 깊이) 홈 너비 파라메타(WIDG)와 홈 깊이 파라메타(DIAG)를 사용하여 홈의 형태를 정의합니다. 싸이클은 계산에서 항상 점이 SPD 및 SPL 아래 프로그램되어 있다고 간주합니다.
사용 중인 공구보다 홈 너비가 크면 여러 단계로 너비가 절삭됩니다. 이 과정에서 전체 너비는 싸이클에 의해 동일하게 분배됩니다. 절삭날 반경 차감 이후 공구 너비의 95%가 최대 전진 거리입니다. 이 값은 절삭 중첩을 유발합니다.
프로그램한 홈 너비가 실제 공구 너비보다 짧으면 에러 메시지 61602 “공구 너비가 잘못 정의
됨”이 표시되고 가공이 중단됩니다. 싸이클에서 절삭날 너비가 0인 것이 감지될 때도 알람 메시지가 나타납니다.
그림 9-38

싸이클
9.5 선삭 가공 싸이클
9-315 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
STA1(각도) STA1 파라메타를 사용하면 홈을 가공할 경사선의 각도를 프로그램할 수 있습니다. 각도는 0 ~ 180도 사이의 값이며 항상 세로축을 기준으로 합니다.
ANG1과 ANG2(측면각) 별도로 지정한 측면각을 사용하여 비대칭형 홈을 설명할 수 있습니다. 각도는 0 ~ 89.999도 사이의 값입니다.
RCO1, RCO2 및 RCI1, RCI2(반경/모따기)
밑면이나 여백에서 반경/모따기를 입력하여 홈의 형태를 수정할 수 있습니다. 양의 부호를 갖
는 반경과 음의 부호를 갖는 모따기를 입력하는 것은 바람직하지 않습니다.
프로그램한 모따기를 적용하는 방법은 10자리 숫자 값인 VARI 파라메타를 통해 지정합니다.
• CHF가 ...인 VARI<10(tens=0) 모따기 사용
• CHR로 프로그램된 VARI>10 모따기 사용
CHF/CHR은 8.1.6절을 참조하십시오.
FAL1 및 FAL2(정삭 공차) 홈 베이스와 측면에 대해 별도의 정삭 공차를 프로그램할 수 있습니다. 황삭 중에 스톡 제거는 최대로 이러한 정삭 공차까지 수행됩니다. 그런 다음 동일한 공구를 사용하여 형상에 평행으
로 최종 형상까지 절삭됩니다.
그림 9-39

싸이클
9.5 선삭 가공 싸이클
9-316 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
IDEP(절입 깊이) 절입 깊이를 프로그램하여 근축 홈 가공을 여러 번의 깊이 전진으로 분할할 수 있습니다. 각 전진 후 칩 분쇄를 위해 공구가 1mm씩 후진합니다.
모든 경우에 IDEP 파라메타를 프로그램해야 합니다.
DTB(드웰 시간) 홈 베이스에서 드웰 시간은 하나 이상의 스핀들 회전이 수행될 수 있도록 선택해야 합니다. 초 단위로 프로그램합니다.
VARI(가공 유형) VARI 파라메타의 단위 자리수를 사용하여 홈의 가공 유형을 정의합니다. 그림에 표시된 값으
로 간주할 수 있습니다.
VARI 파라메타의 10자리 숫자가 모따기를 적용하는 방법을 결정합니다.
VARI 1...8: 모따기가 CHF로 계산됨 VARI 11...18: 모따기가 CHR로 계산됨
Z
X
Z
X
Z
X
Z
X
Z
X
Z
X
Z
X
Z
X
VARI=1/11
VARI=3/13
VARI=5/15
VARI=7/17
VARI=2/12
VARI=4/14
VARI=6/16
VARI=8/18
그림 9-40
파라메타가 다른 값을 가지면 알람 61002 “가공 형식이 잘못 정의됨)”가 표시되면서 싸이클이 중단됩니다.
싸이클이 합당한 홈 형상이 형성되도록 형상 모니터링을 수행합니다. 단, 홈 베이스에서 반경/모따기가 접촉하거나 세로축에 평행인 형상 구간에 면 홈 가공을 수행하는 경우는 제외됩니
다. 이러한 경우에 알람 61603 “홈 형태가 잘못 정의됨”이 표시되면서 싸이클이 중단됩니다.

싸이클
9.5 선삭 가공 싸이클
9-317 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
_VRT(가변 후진 경로) 후진 경로는 홈의 외경 또는 내경에 기초하여 _VRT 파라메타에서 프로그램할 수 있습니다.
_VRT = 0(파라메타가 프로그램되지 않은 경우)이면 공구는 1mm 후진됩니다. 후진 경로는 항상 프로그램된 시스템 단위(인치 또는 미터법)에 따라 측정됩니다.
동일한 후진 경로가 홈으로의 각 깊이 절입 후 칩 분쇄에도 사용됩니다.
기타 참고 사항
홈 가공 싸이클을 호출하기 전에 이중 절삭날 공구를 활성화해야 합니다. 두 절삭날에 대한 옵셋 값을 공구의 연속된 두 개의 D 번호에 저장해야 합니다. 여기서 처음 싸이클 호출 이전에 첫 번째 번호가 활성화되어야 합니다. 싸이클 자체가 절삭 단계에서 두 개의 공구 보정 값 중 사용할 값을 정의하며, 또한 해당 보정 값을 자동으로 활성화합니다. 싸이클을 완료한 후, 싸이클 호출 이전에 프로그램된 공구 보정 번호가 다시 활성화됩니다. 싸이클이 호출될 때 공구 보정을 위해 프로그램한 D 번호가 없으면, 알람 61000 “공구 보정이 활성화되지 않음”이 표시
되면서 싸이클의 실행이 중단됩니다.
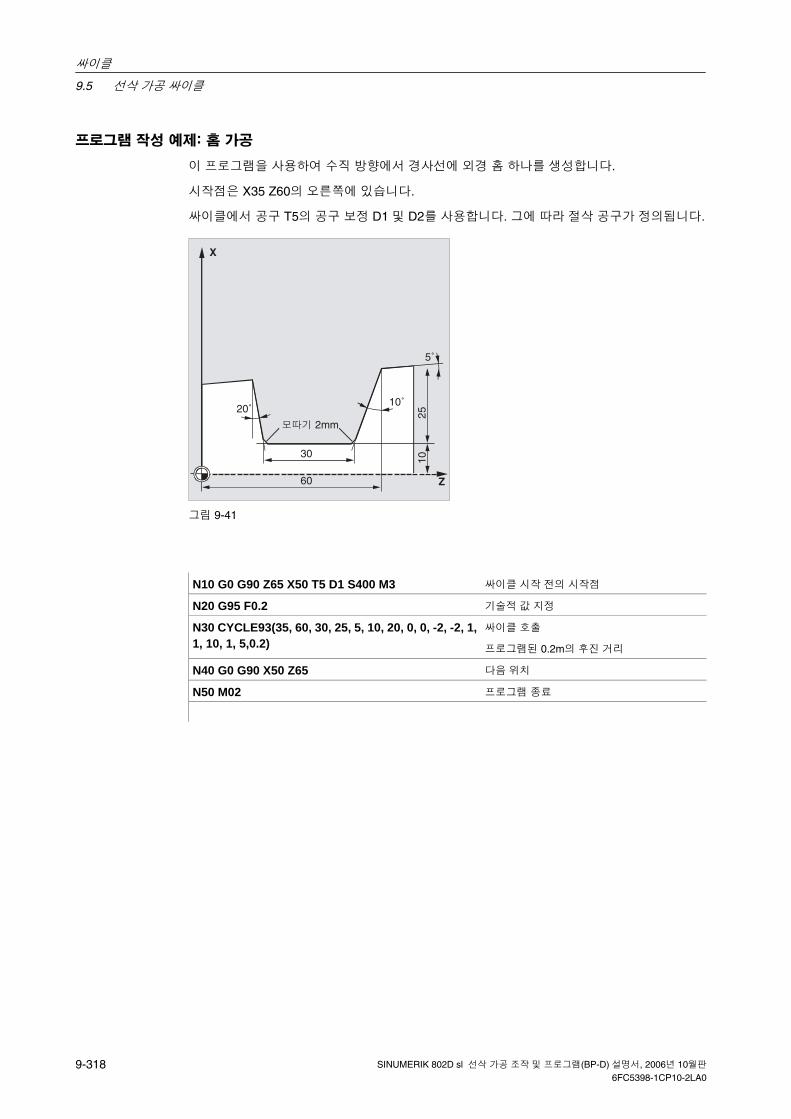
싸이클
9.5 선삭 가공 싸이클
9-318 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 작성 예제: 홈 가공
이 프로그램을 사용하여 수직 방향에서 경사선에 외경 홈 하나를 생성합니다.
시작점은 X35 Z60의 오른쪽에 있습니다.
싸이클에서 공구 T5의 공구 보정 D1 및 D2를 사용합니다. 그에 따라 절삭 공구가 정의됩니다.
그림 9-41
N10 G0 G90 Z65 X50 T5 D1 S400 M3 싸이클 시작 전의 시작점
N20 G95 F0.2 기술적 값 지정
N30 CYCLE93(35, 60, 30, 25, 5, 10, 20, 0, 0, -2, -2, 1,1, 10, 1, 5,0.2)
싸이클 호출
프로그램된 0.2m의 후진 거리 N40 G0 G90 X50 Z65 다음 위치
N50 M02 프로그램 종료

싸이클
9.5 선삭 가공 싸이클
9-319 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.5.3 언더컷(DIN에 대한 E 및 F 형태) – CYCLE94
프로그래밍
CYCLE94(SPD, SPL, FORM, VARI)
파라메타
표 9-14 CYCLE94 파라메타
SPD real 이송 축의 시작점(부호 없이 입력)
SPL real 세로축의 공구 보정 시작점(부호 없이 입력)
FORM char 형태 정의 값: E (형태 E) F (형태 F)
VARI 정수 언더컷 위치 지정 값: 0 (공구 점 방향에 따라) 1..4 (위치 정의):
기능
이 싸이클을 사용하면 3mm 보다 큰 치종 직경에서 표준 요건을 갖춘 형태 E와 F의 DIN509로
의 언더컷을 수행할 수 있습니다.
그림 9-42

싸이클
9.5 선삭 가공 싸이클
9-320 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
순서
싸이클 시작 전 도달 위치:
언터컷이 충돌없이 접근할 수 있는 모든 위치가 시작점이 될 수 있습니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 싸이클에서 결정된 시작점에 접근
• 활성 공구 점 방향에 따라 커터 반경 보정 선택 및 싸이클 호출 전에 프로그램한 피드로 언
터컷 형상을 따라 이동
• G0을 사용하여 시작점으로 후진, 그리고 G40을 사용하여 커터 반경 보정 선택 취소
파라메타에 대한 설명
SPD 및 SPL(시작점) SPD 파라메타를 사용하여 언더컷의 정삭 부분 직경을 지정합니다. SPL 파라메타는 세로축
에서 완성 치수를 정의합니다.
SPD에 대한 프로그램된 값의 최종 직경이 3mm 보다 작으면 알람 61601 “가공된 소재의 직경
이 너무 작음”이 표시되면서 싸이클이 중단됩니다.
그림 9-43

싸이클
9.5 선삭 가공 싸이클
9-321 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
FORM(정의) E 형태와 및 F 형태는 DIN509에 고정되며 이 파라메타를 사용하여 정의해야 합니다.
파라메타 값이 E 또는 F 이외의 값이면 싸이클이 중단되고 알람 61609 “형태가 잘못 정의됨”가 표시됩니다.
그림 9-44

싸이클
9.5 선삭 가공 싸이클
9-322 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
_VARI(언더컷 위치) 언더컷의 위치는 직접 지정하거나 _VARI 파라메타를 사용하여 공구 점 방향에서 파생될 수 있습니다.
_VARI=0: 공구 점 방향에 따라
공구 점 방향은 활성 공구 보정으로부터 싸이클이 자동으로 결정합니다. 공구 점 방향 1 ... 4를 적용하여 싸이클을 진행할 수 있습니다.
싸이클에서 공구 점 방향 5 ... 9, 중 하나를 발견하면 알람 61608 “공구 방향이 잘못 프로그램
됨”이 표시되고 싸이클이 중단됩니다.
그림 9-45 _VARI=0
_VARI=1...4: 언더컷 위치 정의
그림 9-46 _VARI=1...4
싸이클
9.5 선삭 가공 싸이클
9-323 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
_VARI<>0이면 다음 조건이 적용됩니다.
• 실제 공구 점 방향이 확인되지 않습니다. 예를 들어, 기술적으로 적절한 경우 모든 방향을
사용할 수 있습니다.
공구 보정의 해당 파라메타에 지정된 값이 있는 경우 싸이클에서 활성 공구의 공차각을 모니
터링합니다. 공구의 공차각이 너무 작아서 선택한 공구로 언더컷 형태를 절삭할 수 없는 것으
로 확인되면, “언더컷의 형태가 변경됨” 이란 메시지가 제어 시스템에 표시됩니다. 하지만 가
공 작업은 계속 진행됩니다.
싸이클이 자체 시작점을 자동으로 결정합니다. 시작점은 끝 직경에서 2mm 거리에 있고 세로
축의 정삭 치수에서 10mm 떨어진 지점입니다. 프로그램한 좌표 값을 기준으로 하는 이 시작
점의 위치는 활성 공구의 공구 점 방향에 의해 결정됩니다.
기타 참고 사항
싸이클을 호출하기 전에 공구 보정을 활성화해야 합니다. 그렇지 않으면 알람 61000 “공구 보정이 활성화되지 않음”이 출력되면서 싸이클이 중단됩니다.

싸이클
9.5 선삭 가공 싸이클
9-324 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 작성 예제: Undercut_form_E 이 프로그램을 사용하여 E 형태 언더컷을 프로그램할 수 있습니다.
그림 9-47
N10 T1 D1 S300 M3 G95 F0.3 기술적 값 지정
N20 G0 G90 Z100 X50 시작 위치 선택
N30 CYCLE94(20, 60, ”E”) 싸이클 호출
N40 G90 G0 Z100 X50 다음 위치에 접근
N50 M02 프로그램 종료

싸이클
9.5 선삭 가공 싸이클
9-325 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.5.4 릴리프 절삭을 사용한 절삭 – CYCLE95
프로그래밍
CYCLE95 (NPP, MID, FALZ, FALX, FAL, FF1, FF2, FF3, VARI, DT, DAM, _VRT)
파라메타
표 9-15 CYCLE95 파라메타
NPP string 형상 서브루틴 이름
MID real 절입 깊이(부호 없이 입력)
FALZ real 세로 축의 정삭 공차(부호 없이 입력)
FALX real 가로축의 정삭 공차(부호 없이 입력)
FAL real 형상에 따른 정삭 공차 (부호 없이 입력)
FF1 real 언더컷 없는 황삭 피드
FF2 real 릴리프 절삭부로 삽입 피드
FF3 real 정삭 피드
VARI real 가공 유형 값 범위: 1 ... 12
DT real 황삭 작업에서 칩 분쇄를 위한 드웰 시간
DAM real 각 황삭 단계가 칩 분쇄 작업으로 중단된 후 경로 길이
_VRT real 황삭 가공 시 형상으로부터의 후진 거리, 증분식 (부호 없이 입력)
기능
선삭 가공 싸이클을 사용할 때 근축 스톡 제거를 통해 공백 상태에서 서브루틴에 프로그램한 형상을 생성할 수 있습니다. 릴리프 절삭부가 형상에 포함될 수도 있습니다. 외경 및 내경에서 모두 수직 가공과 면 가공을 사용하여 형상을 가공할 수 있습니다. 가공 형식(황삭, 정삭, 완전 가공)은 자유롭게 선택할 수 있습니다. 형상을 황삭할 때, 프로그램한 최대 절입 깊이로부터 근축 절삭이 프로그램되고, 거친 부분은 형상과 만나는 교차점에 도달된 후 형상에 평행하게 제거됩니다. 황삭 가공은 프로그램된 최종 가공 공차까지 수행됩니다.
정삭은 황삭과 동일한 방향으로 수행됩니다. 싸이클이 자동으로 공구 반경 보정을 선택하거나
선택 취소합니다.

싸이클
9.5 선삭 가공 싸이클
9-326 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 9-48
순서
싸이클 시작 전 도달 위치:
형상 시작점에 충돌없이 접근할 수 있는 모든 위치가 시작점이 될 수 있습니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
싸이클 시작점이 내부적으로 계산되고 두 축에서 동시에 G0을 사용하여 접근됩니다.
릴리프 절삭부가 없는 황삭:
• 유동 깊이로 근축 전진이 내부적으로 계산되고 G0을 사용하여 접근합니다.
• G1을 사용하여 FF1 피드로 근축 황삭 교차점의 접근
• G1/G2/G3 및 FF1을 사용하여 형상에 정삭 공차를 더한 거리를 따라 형상에 평행으로 황삭
• 각 축에서 _VRT 아래 프로그램된 길이만큼 후진 및 G0을 사용하여 상승
• 이 순서는 절삭 단계의 총 깊이에 도달할 때까지 반복됩니다.
• 릴리프 절삭부 없이 황삭할 때는 싸이클 시작점으로 후진은 축 단위로 수행됩니다.

싸이클
9.5 선삭 가공 싸이클
9-327 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 9-49
릴리프 절삭부 황삭:
• G0을 사용하여 축별로 다음 릴리프 절삭의 시작점에 접근합니다. 이 과정에서 추가 싸이
클 내부 안전 공차를 관찰합니다.
• G1/G2/G3 및 FF2를 사용하여 형상에 정삭 공차를 더한 길이를 따라 전진합니다.
• G1을 사용하여 FF1 피드로 근축 황삭 교차점에 접근합니다.
• 첫 절삭 단계에서와 같이 형상을 따라 라운딩, 후진 및 복귀가 수행됩니다.
• 추가 릴리프 절삭부가 있는 경우 각 릴리프 절삭부에 대해 이 순서를 반복합니다.
그림 9-50

싸이클
9.5 선삭 가공 싸이클
9-328 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
정삭:
• G0을 사용하여 축별로 싸이클 시작점에 접근합니다.
• 두 축에서 동시에 G0을 사용하여 형상 시작점에 접근합니다.
• G1/G2/G3 및 FF3을 사용하여 형상을 따라 정삭
• 두 축과 G0을 사용하여 시작점으로 후진
파라메타에 대한 설명
NPP(이름) 형상 이름을 지정하는 데 이 파라메타를 사용합니다.
1. 형상을 서브루틴으로 정의할 수 있습니다. NPP=서브루틴의 이름
프로그램 설명서에 설명된 모든 이름 규약이 형상 서브루틴의 이름에 적용됩니다.
입력:
– 서브루틴이 이미 있음 → 이름을 입력하고 작업을 계속합니다.
– 서브루틴이 아직 없음 → 이름을 입력하고 “새 파일 작성” 소프트 키를 선택합니다. 입력한 이름으로 프로그램(주 프로그램)이 생성되며, 형상 편집기로 프로그램이 이동합
니다.
“공정 마스크” 소프트 키를 사용하여 입력을 확인하고 싸이클 도움말 화면으로 돌아갑니다.
2. 형상 관련 프로그램을 메인 프로그램에 추가할 수 있습니다. NPP=시작 레이블의 이름: 끝 레이블의 이름
입력:
– 형상을 이미 설명함 → 시작 레이블의 이름: 끝 레이블의 이름
– 형상이 아직 설명되지 않음 → 시작 레이블의 이름을 입력하고 “컨투어 추가” 소프트 키를 누릅니다. 사용자가 입력한 이름을 이용하여 시작 및 끝 레이블을 자동으로 생성한 후 형상 편집
기로 프로그램이 이동합니다.
“공정 마스크” 소프트 키를 사용하여 입력을 확인하고 싸이클 도움말 화면으로 돌아갑니다.

싸이클
9.5 선삭 가공 싸이클
9-329 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 9-51
예:
NPP=KONTUR_1 황삭 가공 형상은 완전한 프로그램 Kontur_1입니다.
NPP=ANFANG:ENDE 호출 프로그램에서 ANFANG 레이블을 포함하는 블
록에서 시작하여 ENDE 레이블이 포함된 블록까지의
구간으로 황삭 가공 형상을 정의합니다.
MID(전진 깊이) 황삭 프로세스에 허용되는 최대 절입 깊이를 정의하는 데 MID 파라메타를 사용합니다.
싸이클이 황삭에 사용되는 유동 절입 깊이를 자동으로 계산합니다.
릴리프 절삭부를 포함하는 형상을 황삭하는 경우 황삭 공정이 싸이클에 의해 개별 황삭 구간
으로 분할됩니다. 싸이클이 각 황삭 구간에 대해 새로운 유동 절입 깊이를 계산합니다. 이 절입 깊이는 항상 프로그램한 절입 깊이와 그 값의 1/2 사이에 있습니다. 황삭 구간의 총 깊이와 가공될 깊이가 균등 분배되는 최대 절입 깊이(프로그램된 값)을 토대로 필요한 황삭 단계의 수가 결정됩니다. 최적의 절삭 조건을 제공하는 값입니다. 이 형상을 황삭하는 경우 그림에 나온 가공 단계가 구성됩니다.

싸이클
9.5 선삭 가공 싸이클
9-330 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 9-52
유동 절입 깊이를 계산하는 예:
가공 구간 1의 총 깊이는 39mm입니다. 최대 절입 깊이가 5m이면 8번의 절삭부 황삭이 필요
합니다. 이 작업은 4.875mm 절입으로 수행됩니다.
2 단계 가공에서도 매번 4.5mm씩 전진하는 8번의 황삭 단계가 수행됩니다(차이 총합 36mm).
3 단계 가공에서는 매번 3.5mm의 유동 전진으로 2번의 황삭 통과가 수행됩니다(차이 총합 7 mm).
FAL, FALZ 및 FALX(정삭 공차) 형상을 따르는 정삭 공차의 FAL 파라미타를 통해 또는 서로 다른 정삭 공차를 지정하려는 경우 FALZ 및 FALX 파라메타를 사용하여 황삭에 필요한 정삭 공차를 지정할 수 있습니다. 이 경우 이 값은 두 축에서 정삭 공차로 간주됩니다.
프로그램한 값에 대한 가능성 검사는 수행하지 않습니다. 다시 말하면, 세 파라메타 모두에 값을 지정하면 이러한 모든 정삭 공차가 싸이클에 고려됩니다. 하지만 정삭 공차를 정의하는 두 가지 방법 중 하나를 결정하는 것이 합리적입니다.
황삭의 최대 수행은 이러한 정삭 공차까지 입니다. 마지막까지 잔류하는 코너도 각 근축 황삭 프로세스 직후에 제거됩니다. 따라서 황삭을 완료한 후 잔류 코너에 대한 추가 절삭이 필요하
지 않습니다. 정삭 공차를 하나도 프로그램하지 않으면, 최종 형상까지 황삭이 진행될 때 스톡
이 제거됩니다.
FF1, FF2 및 FF3(피드) 그림 9-53에서처럼 개별 가공 단계에 대해 서로 다른 피드를 지정할 수 있습니다.

싸이클
9.5 선삭 가공 싸이클
9-331 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 9-53
VARI(가공 유형) 표 9-16 가공 유형
값 수직/수평 내경/외경 황삭/정삭/완전
1 L A 황삭
2 P A 황삭
3 L I 황삭
4 P I 황삭
5 L A 정삭
6 P A 정삭
7 L I 정삭
8 P I 정삭
9 L A 완전 가공
10 P A 완전 가공
11 L I 완전 가공
12 P I 완전 가공
수직 가공에서는 항상 가로축을 따라 전진이 일어나는 반면, 수평 가공에서는 세로축을 따라 전진이 수행됩니다.
외경 가공이란 음의 축 방향으로 전진이 수행되는 것을 의미합니다. 내경 가공에서는 양의 축 방향으로 전진이 수행됩니다.

싸이클
9.5 선삭 가공 싸이클
9-332 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
VARI 파라메타는 가능성 검사 대상입니다. 싸이클이 호출될 때 파라메타 값이 1 ... 12 범위를 벗어나면, 알람 61002 “가공 형식이 잘못 정의됨”이 표시되면서 싸이클이 취소됩니다.
그림 9-54

싸이클
9.5 선삭 가공 싸이클
9-333 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
DT 및 DAM(드웰 시간 및 경로 길이)
칩 분쇄를 수행하기 위해 일정한 거리만큼 이동한 후 개별 황삭 단계가 중단되도록 하는 데 사
용할 수 있는 파라메타입니다. 두 파라메타는 황삭 작업에서만 연관됩니다. 칩 분쇄가 수행될
최대 거리를 정의하는 데 DAM 파라메타를 사용합니다. DT에서는 각 절삭부 중단점에서 개별
적으로 수행되는 적절한 드웰 시간(초 단위)을 프로그램할 수 있습니다. 절삭 중단에 대해 지
정한 거리가 없으면(DAM=0), 드웰 시간이 없는 중단되지 않은 황삭 단계가 생성됩니다.
그림 9-55
_VRT(상승 거리) 황삭 가공할 때 두 축에서 공구가 후진하는 거리를 프로그램하는 데 _VRT 파라메타를 사용할 수 있습니다.
_VRT=0(파라메타를 프로그램하지 않음)이면 공구가 1mm씩 후진합니다.
추가 정보: 형상 정의
형상 서브루틴에는 가공 평면의 두 축에서 이동하는 블록이 3개 이상 포함되어야 합니다.
형상 프로그램이 더 짧으면 알람 10933 “형상 프로그램에 포함된 형상 블록 수가 부족함”과 61606 “형상 준비 에러”가 출력되면서 싸이클이 중단됩니다.
릴리프 적살부들을 직접 연결할 수 있습니다. 가공 평면에서 이동하지 않는 블록은 제한없이 기록할 수 있습니다.
싸이클에서 이동하는 모든 블록은 유동 평면의 처음 두 축에 대해 준비되는데, 그 이유는 이들
만 절삭 프로세스에 포함되기 때문입니다. 다른 축에 대해 프로그램된 이동이 형상 프로그램
에 포함될 수도 있습니다. 하지만 이들의 이동 거리는 전체 싸이클에 적용되지 않습니다.

싸이클
9.5 선삭 가공 싸이클
9-334 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
G0, G1, G2 및 G3를 사용하여 프로그램한 직선과 원만 형상의 형상으로 허용됩니다. 또한 황
삭 및 모따기 명령도 프로그램할 수 있습니다. 그 밖에 명령이 형상에 프로그램되어 있는 경우,
알람 10930 “스톡 제거 형상에 잘못된 보간 형식이 있음”이 표시되면서 싸이클이 중단됩니다.
현재 가공 평면에서 이송 동작을 수행하는 첫 번째 블록에 이동 명령 G0, G1, G2 또는 G3이
포함되어야 합니다. 그렇지 않으면 싸이클이 취소되어 알람 15800 “CONTPRON에 대한 필수
요건이 잘못됨”이 표시됩니다. 이 알람은 G41/42가 활성화된 경우에도 표시됩니다. 형상의 시
작점은 가공 평면에서 첫 번째 프로그램된 위치입니다.
프로그램한 형상을 가공하기 위해 형상 성분의 최대 수를 수용할 수 있는 싸이클 내부 메모리
가 준비됩니다. 그 수는 형상에 따라 결정됩니다. 형상에 포함된 성분이 너무 많으면 싸이클이
취소되고 알람 10934 “형상 테이블 오버플로우”가 표시됩니다. 이러한 경우, 전체 형상을 여
러 개의 형상 구간으로 분할하고 각 구간에 대한 싸이클을 별도로 호출해야 합니다.
형상의 프로그램된 끝점이나 시작점에 최대 직경이 있지 않으면 싸이클이 자동으로 축에 평
행인 직선을 추가하여 최대 형상을 완성하며, 이 시작점은 언더컷으로 제거됩니다.
그림 9-56
G41/G42를 사용하여 형상 서브루틴에 공구 반경 보정을 프로그램한 경우, 싸이클이 취소되
고 알람 10931 “형상 절삭이 잘못됨”이 표시됩니다.
형상 방향
스톡 제거 형상의 프로그램 방향은 자유롭게 선택할 수 있습니다. 싸이클에서 가공 방향이 자동으로 결정됩니다. 가공이 완료될 때, 황삭 가공을 수행한 방향과 동일한 방향으로 형상이 완성(정삭)됩니다.
가공 방향을 결정할 때 맨 처음과 마지막에 프로그램한 형상 점을 고려합니다. 따라서 형상 서브루틴의 첫 블록에 항상 두 좌표가 프로그램되어 있어야 합니다.

싸이클
9.5 선삭 가공 싸이클
9-335 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
형상 모니터링
싸이클에서 다음에 관한 형상 모니터링을 제공합니다.
• 활성 공구의 공차각
• 틈 각도 가 180도보다 큰 호에 대한 원 경로 프로그램
릴리프 절삭부가 있는 경우 싸이클이 활성 공구를 사용하여 가공할 수 있는 여부를 확인합니
다. 원에서 가공이 형상에 위배된다고 판단하면 알람 61604 “활성 공구가 프로그램된 형상을 벗어남”을 표시하면서 싸이클이 중단됩니다.
공구 보정에서 공구 공차각을 0으로 지정하면 형상 모니터링이 수행되지 않습니다d.
보정에서 지나치게 큰 원호가 발견되면 알람 10931 “가공 형상이 잘못됨”이 표시됩니다.
시작점
싸이클이 가공 작업의 시작점을 자동으로 결정합니다. 정삭 공차 + 상승 거리(_VRT 파라메
타)의 양만큼 형상을 이동하여 깊이 절입을 수행하는 축에 시작점이 있습니다. 다른 축에서는 형상 시작점에서 _VRT 앞으로 나간 값에 정삭 공차를 더한 값만큼 전진합니다.
시작점에 접근하면 싸이클 내부에서 커터 반경 보정이 선택됩니다.
따라서 싸이클이 호출되기 전에 마지막 점이 선택되어야 충돌이 일어나지 않고 적절히 보정
된 이동이 진행되기에 충분한 공간을 제공 받으면서 접근할 수 있게 됩니다.
그림 9-57
싸이클 접근 방식
싸이클에 의해 결정된 시작점으로 접근은 황삭에서는 항상 두 축에서 동시에 일어나고, 정삭
에서는 축별로 차례로 일어납니다. 정삭 가공에서 전진 축이 먼저 이동합니다.

싸이클
9.5 선삭 가공 싸이클
9-336 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 작성 예 1: 스톡 제거 싸이클
파라메타 정의를 설명하기 위해 그림에 표시된 형상은 완전 가공에 의해 외경으로 수직 가공
됩니다. 축별로 정삭 공차가 지정됩니다. 황삭 가공에서는 절삭이 중단되지 않습니다. 최대 절입 깊이 5mm입니다.
별도 프로그램에 형상이 저장됩니다.
그림 9-58
N10 T1 D1 G0 G95 S500 M3 Z125 X81 호출 전에 위치에 접근 N20 CYCLE95(”KONTUR_1”, 5, 1.2, 0.6, , 0.2, 0.1, 0.2, 9, , 0.5, 0.2)
싸이클 호출
프로그램된 0.2m의 후진 거리 N30 G0 G90 X81 시작점에 접근
N40 Z125 축별로 이동
N50 M2 프로그램 종료
%_N_KONTUR_1_SPF 형상 서브루틴의 시작
N100 Z120 X37 N110 Z117 X40
축별로 이동
N120 Z112 RND=5 반경 5로 라운딩
N130 Z95 X65 N140 Z87 N150 Z77 X29 N160 Z62 N170 Z58 X44 N180 Z52 N190 Z41 X37 N200 Z35 N210 X76
축별로 이동
N220 M17 서브루틴 끝

싸이클
9.5 선삭 가공 싸이클
9-337 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그램 작성 예 2: 스톡 제거 싸이클
스톡 제거 형상은 호출하는 프로그램에 정의되며, 정삭이 호출된 직후에 이동됩니다.
그림 9-59
N110 G18 DIAMOF G90 G96 F0.8
N120 S500 M3
N130 T1 D1
N140 G0 X70
N150 Z160
N160 CYCLE95(”ANFANG:ENDE”,2.5,0.8, 0.8,0,0.8,0.75,0.6,1, , , )
싸이클 호출
N170 G0 X70 Z160
N175 M02
START:
N180 G1 X10 Z100 F0.6
N190 Z90
N200 Z70 ANG=150
N210 Z50 ANG=135
N220 Z50 X50
END:
N230 M02

싸이클
9.5 선삭 가공 싸이클
9-338 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.5.5 나사 언더컷 – CYCLE96
프로그래밍
CYCLE96 (DIATH, SPL, FORM, VARI)
파라메타
표 9-17 CYCLE94 파라메타
DIATH real 나사의 공칭 직경
SPL real 세로축에서 정정 시작점
FORM char 형태 정의 값: A(형태 A) B(형태 B) C(형태 C) D(형태 D)
VARI 정수 언더컷 위치 지정 값: 0: 공구 점 방향에 따라 1...4: 위치 정의
기능
이 싸이클을 사용하면 미터 ISO 나사를 사용하여 부품의 DIN76에 나사 언더컷을 수행할 수 있습니다.
그림 9-60

싸이클
9.5 선삭 가공 싸이클
9-339 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
순서
싸이클 시작 전 도달 위치:
각 나사 언더컷이 충돌 없이 접근할 수 있는 모든 위치가 시작점이 될 수 있습니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 싸이클에서 결정된 시작점에 접근
• 활성 공구 방향에 따라 공구 반경 보정 선택. 싸이클이 호출되기 전에 프로그램된 피드로
언터컷 형상을 따라 이동
• G0을 사용하여 시작점으로 후진, 그리고 G40을 사용하여 공구 반경 보정 선택 취소
파라메타에 대한 설명
DIATH(공칭 직경)
M3부터 M68까지 미터 나사의 나사 언더컷을 수행하는 데 이 싸이클을 사용합니다.
DIATH에 대해 프로그램된 값에 따른 결과가 최종 직경 3mm보다 작을 경우, 싸이클이 최소되
고 알람
61601 “가공된 소재의 직경이 너무 작음)”이 표시됩니다.
이 파라메타 값이 DIN76 부분 1에 지정한 값과 다르면 싸이클이 취소되고 알람
61001 “나사 리드가 잘못 정의됨”이 표시됩니다.
SPL(시작점)
세로축의 완성 치수는 SPL 파라메타를 사용하여 정의합니다.
그림 9-61

싸이클
9.5 선삭 가공 싸이클
9-340 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
FORM(정의)
A 및 B 형태의 나사 언더컷은 외경 나사에 대해 정의되고, A 형태는 표준 런아웃 나사에 대해, B 형태는 짧은 런아웃 나사에 대해 정의됩니다.
C 및 D 형태의 나사 언더컷은 내경 나사에 사용되고, C 형태는 표준 런아웃 나사에 대해, D 형태는 짧은 런아웃 나사에 대해 사용됩니다.
그림 9-62
파라메타 값이 A ... D 사이 값이 아니면 싸이클이 중단되고 알람 61609 “형태가 잘못 정의됨”이 표시됩니다.
싸이클 내부에서 자동으로 공구 반경 보정이 선택됩니다.
싸이클은 공구 점 방향 1 ... 4만 사용합니다. 싸이클에서 5 ...9 범위의 공구 점 방향을 감지하
거나 선택한 공구 점 방향을 사용하여 해당 언더컷 형태를 가공할 수 없는 경우, 알람 61608 “공구 방향이 잘못 프로그램됨”이 표시되고 싸이클이 취소됩니다.
VARI(언더컷 위치)
언더컷의 위치는 직접 지정하거나 _VARI 파라메타를 사용하여 공구 점 방향에서 파생될 수
있습니다. CYCLE94의 _VARI를 참조하십시오.
활성 공구의 공구 점 방향과 나사 직경에 의해 결정되는 시작점을 싸이클이 자동으로 검색합
니다. 프로그램한 좌표 값을 기준으로 하는 이 시작점의 위치는 활성 공구의 공구 점 방향에
의해 결정됩니다.
A 및 B 형태의 경우 싸이클에서 활성 공구의 언더컷 각도가 모니터링됩니다. 선택한 공구로는
언더컷 형태를 가공할 수 없음이 감지되면 메시지 “언더컷 형태가 변경됨”이 제어 시스템에
표시됩니다. 하지만 가공은 계속 진행됩니다.

싸이클
9.5 선삭 가공 싸이클
9-341 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
기타 참고 사항
싸이클을 호출하기 전에 공구 보정을 활성화해야 합니다. 그렇지 않으면 싸이클이 종료되고 에러 메시지 61000 “공구 보정이 활성화되지 않음”이 표시됩니다.

싸이클
9.5 선삭 가공 싸이클
9-342 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
프로그램 작성 예제: Thread_undercut_form_A 이 프로그램을 사용하여 A 형태 나사 언더컷을 프로그램할 수 있습니다.
그림 9-63
N10 D3 T1 S300 M3 G95 F0.3 기술적 값 지정
N20 G0 G90 Z100 X50 시작 위치 선택
N30 CYCLE96 (42, 60, ”A”) 싸이클 호출
N40 G90 G0 X30 Z100 다음 위치로 접근
N50 M2 프로그램 종료

싸이클
9.5 선삭 가공 싸이클
9-343 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.5.6 나사 절삭 – CYCLE97
프로그래밍
CYCLE97 (PIT, MPIT, SPL, FPL, DM1, DM2, APP, ROP, TDEP, FAL, IANG, NSP, NRC, NID, VARI, NUMT, _VRT)
파라메타
표 9-18 CYCLE97 파라메타
PST real 하나의 값으로서 나사 리드(부호 없이 입력)
MPIT real 나사 크기로서 나사 리드 값 범위: 3 (M3) ... 60 (M60)
SPL real 세로축의 나사 시작점
FPL real 세로축의 나사 끝점
DM1 real 시작점에서 나사 직경
DM2 real 끝점에서 나사 직경
APP real 런인 경로(부호 없이 입력)
ROP real 런아웃 경로(부호 없이 입력)
TDEP real 나사 깊이(부호 없이 입력)
FAL real 정삭 공차(부호 없이 입력)
IANG real 절입 각도 값 범위: “+” (측면에서 측면 전진의 경우) “-” (교대식 측면 전진의 경우)
NSP real 첫 번째 나사 회전에 대한 시작점 옵셋(부호 없이 입력)
NRC int 황삭 절삭 수(부호 없이 입력)
NID int 공회전 통과 수(부호 없이 입력)
VARI int 나사의 가공 유형 정의 값 범위: 1 ... 4
NUMT int 나사 회전 수(부호 없이 입력)
_VRT real 초기 직경에 따른 가변 후진 거리, 증분식(부호 없이 입력)
기능
나사 절삭 싸이클을 사용하여 수직 및 수평 가공에서 일정한 리드로 원통형 및 점감형 나사(외경 및 내경)를 제작할 수 있습니다. 나사는 단일 또는 다중 나사일 수 있습니다. 다중 나사에서 개별 나사 회전은 하나씩 차례로 가공됩니다.
전진은 자동으로 수행됩니다. 절삭당 또는 일정한 전진 또는 일정한 절삭 단면 변형 사이에서 선택할 수 있습니다.
싸이클 시작 전에 프로그램해야 하는 스핀들의 회전 방향에 의해 오른쪽 또는 왼쪽 나사가 결정됩니다.
나사와 함께 이동하는 블록에는 피드 및 스핀들 오버라이드가 모두 무효합니다.

싸이클
9.5 선삭 가공 싸이클
9-344 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 9-64
중요
싸이클을 사용하려면 위치 측정 시스템이 있는 속도 제어식 스핀들이 필요합니다.
순서
싸이클 시작 전 도달 위치:
프로그램된 나사 시작점에 런인 경로를 더한 거리에 충돌 없이 접근할 수 있는 모든 위치가 시
작 지점이 될 수 있습니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 첫 번째 나사 회전에 대한 런인 경로 맨 앞에서 싸이클에 결정된 시작점에
접근
• VARI 아래 정의된 전진 유형에 따라 황삭 가공을 위한 전진
• 프로그램한 황삭 절삭 수에 따라 나사 절삭 작업이 반복됩니다.
• G33을 사용하여 다음 단계에서 정삭 공차를 차감합니다.
• 이 단계는 공회전 통과 수에 따라 반복됩니다.
• 각 추가 나사 회전에 대해 전체 연속 동작이 반복됩니다.

싸이클
9.5 선삭 가공 싸이클
9-345 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
파라메타에 대한 설명
그림 9-65
PIT 및 MPIT(값 및 나사 크기) 나사 리드는 축과 평행인 값이고 부호 없이 지정됩니다. 미터 원통 나사를 가공하려는 경우 MPIT(M3 ~ M60) 파라메타를 통해 나사 리드를 나사 크기로 지정할 수도 있습니다. 두 파라메
타 중 하나만 선택하여 사용해야 합니다. 두 파라메타 값이 상충되면 알람 61001 “나사 리드 틀림”이 표시되면서 싸이클이 중단됩니다.
DM1 및 DM2(직경) 이 파라메타를 사용하여 나사 시작 및 끝점에 대한 나사 직경을 정의할 수 있습니다. 내경 나사의 경우 이 직경은 태핑 홀 직경입니다.
SPL, FPL, APP 및 ROP(시작점, 끝점, 런인 및 런아웃 경로) 상관 관계 프로그램된 시작점(SPL) 또는 끝점(FPL)이 나사의 처음 시작점을 구성합니다. 하지만 싸이클
에 사용되는 시작점은 런인 경로 APP만큼 앞으로 이동된 시작점이고, 따라서 프로그램된 끝점에서 런아웃 경로 ROP 만큼 뒤로 물러난 점이 끝점이 됩니다. 가로축에서, 싸이클에 의해 정의된 시작점은 항상 프로그램된 직경에서 1mm 위에 있습니다. 이 상승면은 제어 시스템 내에서 자동으로 생성됩니다.
TDEP, FAL, NRC 및 NID(나사 깊이, 정삭 공차, 절삭 수) 상관 관계 프로그램된 정삭 공차는 근축으로 작용하며, 지정된 나사 깊이 TDEP에서 차감되고, 그 결과
가 몇 개의 황삭 절삭으로 나뉩니다.
싸이클이 VARI 파라메타를 토대로 개별 절입 깊이를 자동으로 계산합니다.
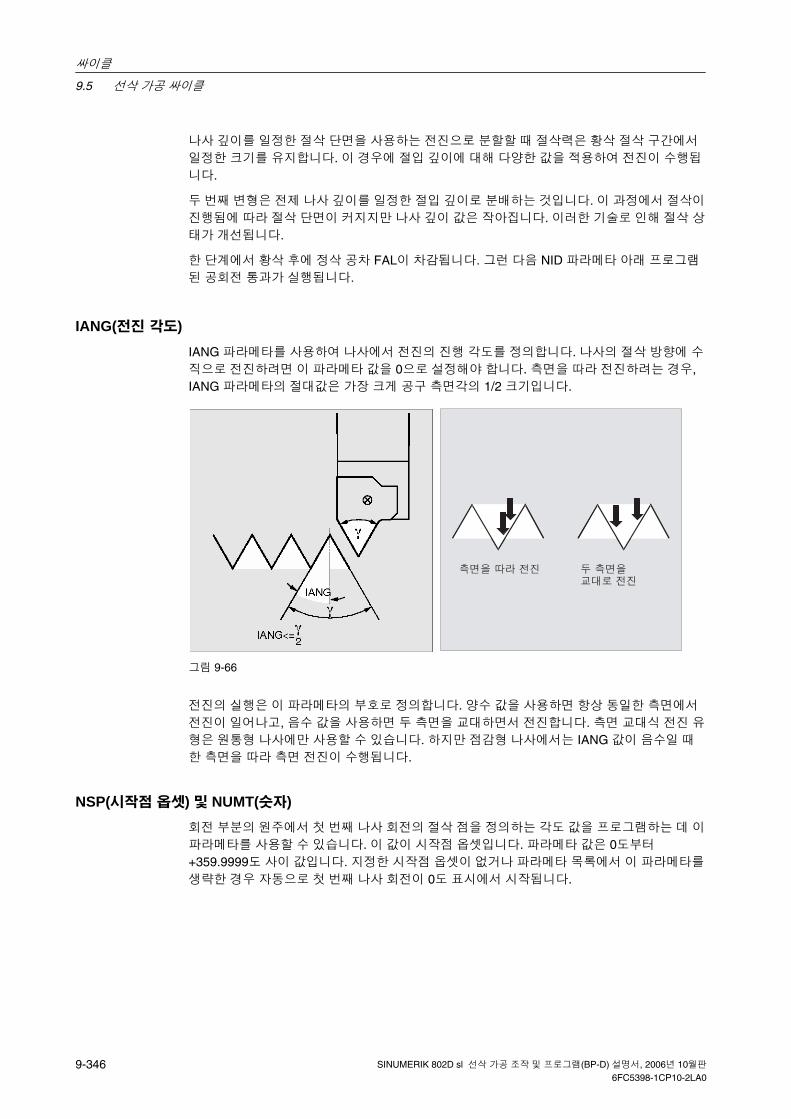
싸이클
9.5 선삭 가공 싸이클
9-346 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
나사 깊이를 일정한 절삭 단면을 사용하는 전진으로 분할할 때 절삭력은 황삭 절삭 구간에서 일정한 크기를 유지합니다. 이 경우에 절입 깊이에 대해 다양한 값을 적용하여 전진이 수행됩
니다.
두 번째 변형은 전제 나사 깊이를 일정한 절입 깊이로 분배하는 것입니다. 이 과정에서 절삭이 진행됨에 따라 절삭 단면이 커지지만 나사 깊이 값은 작아집니다. 이러한 기술로 인해 절삭 상태가 개선됩니다.
한 단계에서 황삭 후에 정삭 공차 FAL이 차감됩니다. 그런 다음 NID 파라메타 아래 프로그램
된 공회전 통과가 실행됩니다.
IANG(전진 각도) IANG 파라메타를 사용하여 나사에서 전진의 진행 각도를 정의합니다. 나사의 절삭 방향에 수직으로 전진하려면 이 파라메타 값을 0으로 설정해야 합니다. 측면을 따라 전진하려는 경우, IANG 파라메타의 절대값은 가장 크게 공구 측면각의 1/2 크기입니다.
그림 9-66
전진의 실행은 이 파라메타의 부호로 정의합니다. 양수 값을 사용하면 항상 동일한 측면에서 전진이 일어나고, 음수 값을 사용하면 두 측면을 교대하면서 전진합니다. 측면 교대식 전진 유형은 원통형 나사에만 사용할 수 있습니다. 하지만 점감형 나사에서는 IANG 값이 음수일 때 한 측면을 따라 측면 전진이 수행됩니다.
NSP(시작점 옵셋) 및 NUMT(숫자) 회전 부분의 원주에서 첫 번째 나사 회전의 절삭 점을 정의하는 각도 값을 프로그램하는 데 이 파라메타를 사용할 수 있습니다. 이 값이 시작점 옵셋입니다. 파라메타 값은 0도부터 +359.9999도 사이 값입니다. 지정한 시작점 옵셋이 없거나 파라메타 목록에서 이 파라메타를 생략한 경우 자동으로 첫 번째 나사 회전이 0도 표시에서 시작됩니다.

싸이클
9.5 선삭 가공 싸이클
9-347 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
그림 9-67
NUMT 파라메타를 사용하여 다중 회전 나사의 나사 회전 수를 정의합니다. 단일 회전 나사의 경우, 파라메타 값을 0으로 지정하거나 파라메타 목록에서 완전히 삭제할 수 있습니다.
회전한 부분의 원주 전체에 나사 회전이 동일하게 분배됩니다.
원주 상에 비대칭 나사 회전 정렬을 사용한 다중 회전 나사를 제작하려면, 해당하는 시작점 옵셋을 프로그램할 때 각 나사 회전에 대한 싸이클을 호출해야 합니다.
VARI(가공 유형) VARI 파라메타를 사용하여 수행할 작업이 외경 절삭인지 또는 내경 절삭인지 여부와 황삭 가공에서 절입에 사용할 기술을 정의합니다. VARI 파라메타 값은 1 - 4 범위이며, 다음과 같은 의미를 갖습니다.
그림 9-68

싸이클
9.5 선삭 가공 싸이클
9-348 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
표 9-19 가공 유형
값 내경/외경 일정한 절입/일정한 절삭 단면
1 A 일정 절입
2 I 일정 절입
3 A 일정 절삭 단면
4 I 일정 절삭 단면
VARI 파라메타에 대해 다른 값을 프로그램하면, 알람 61002 “가공 형식이 잘못 정의됨”이 표시되면서 싸이클이 중단됩니다.
_VRT(가변 후진 경로) _VRT 파라메타에서 초기 나사 직경에 기초하여 후진 경로를 프로그램할 수 있습니다. _VRT = 0(파라메타가 프로그램되지 않은 경우)이면 후진 경로는 1mm입니다. 후진 경로는 항상 프로그램된 시스템 단위(인치 또는 미터법)에 따라 측정됩니다.
기타 참고 사항
종형 나사 와 횡형 나사 간 구분
종형과 횡형 중 어느 형태로 나사를 가공할지는 싸이클 자체가 결정합니다. 이 결정은 나사를 절삭하는 태이퍼의 각도에 좌우됩니다. 테이퍼의 각도가 45도 이면 세로 나사가 가공되고, 그렇지 않으면 가로 나사가 가공됩니다.
그림 9-69

싸이클
9.5 선삭 가공 싸이클
9-349 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
프로그램 작성 예제: 나사 가공
이 프로그램을 사용하여 측면 전진을 적용한 미터 외경 나사 M42x2를 가공할 수 있습니다. 일정한 절삭 단면을 사용하여 공구가 전진합니다. 정삭 공차를 사용하지 않고 1.23 mm 나사 깊이로 5번의 황삭 절삭이 수행됩니다. 이 작업이 완료된 후 2번의 공회전 통과가 수행됩니다.
그림 9-70
N10 G0 G90 Z100 X60 시작 위치 선택
N20 G95 D1 T1 S1000 M4 기술적 값 지정
N30 CYCLE97( , 42, 0, -35, 42, 42, 10, 3, 1.23, 0, 30, 0, 5, 2, 3, 1)
싸이클 호출
N40 G90 G0 X100 Z100 다음 위치로 접근
N50 M2 프로그램 종료

싸이클
9.5 선삭 가공 싸이클
9-350 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
9.5.7 체인 나사 – CYCLE98
프로그래밍
CYCLE98 (PO1, DM1, PO2, DM2, PO3, DM3, PO4, DM4, APP, ROP, TDEP, FAL, IANG, NSP, NRC, NID, PP1, PP2, PP3, VARI, NUMT, _VRT)
파라메타
표 9-20 CYCLE98 파라메타
PO1 real 세로축의 나사 시작점
DM1 real 시작점에서 나사 직경
PO2 real 세로축에서 첫 번째 중간점
DM2 real 첫 번째 중간점에서 직경
PO3 real 두 번째 중간점
DM3 real 두 번째 중간점에서 직경
PO4 real 세로축의 나사 끝점
DM4 real 끝점에서 직경
APP real 런인 경로(부호 없이 입력)
ROP real 런아웃 경로(부호 없이 입력)
TDEP real 나사 깊이(부호 없이 입력)
FAL real 정삭 공차(부호 없이 입력)
IANG real 절입 각도 값 범위: “+” (측면에서 측면 전진의 경우) “-” (교대식 측면 전진의 경우)
NSP real 첫 번째 나사 회전에 대한 시작점 옵셋(부호 없이 입력)
NRC int 황삭 절삭 수(부호 없이 입력)
NID int 공회전 통과 수(부호 없이 입력)
PP1 real 하나의 값으로서 나사 리드 1(부호 없이 입력)
PP2 real 하나의 값으로서 나사 리드 2(부호 없이 입력)
PP3 real 하나의 값으로서 나사 리드 3(부호 없이 입력)
VARI int 나사의 가공 유형 정의 값 범위: 1 ... 4
NUMT int 나사 회전 수(부호 없이 입력)
_VRT real 초기 직경에 따른 가변 후진 거리, 증분식(부호 없이 입력)

싸이클
9.5 선삭 가공 싸이클
9-351 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
기능
이 싸이클을 사용하여 여러 개의 원통형 또는 점감형(Tapered) 나사를 연속해서 제작할 수 있습니다. 개별 나사 구간이 다른 리드값을 가질 수 있으며, 여기서 한 나사 내의 리드와 동일한 나사 구간이 일정해야 합니다.
그림 9-71
순서
싸이클 시작 전 도달 위치:
프로그램된 나사 시작점에 런인 경로를 더한 거리에 충돌 없이 접근할 수 있는 모든 위치가 시
작 지점이 될 수 있습니다.
싸이클이 다음과 같은 일련의 연속 동작을 생성합니다.
• G0을 사용하여 첫 번째 나사 회전에 대한 런인 경로 맨 앞에서 싸이클에 결정된 시작점에
접근
• VARI 아래 정의된 전진 유형에 따라 황삭 가공을 위한 전진
• 프로그램한 황삭 절삭 수에 따라 나사 절삭 작업이 반복됩니다.
• G33을 사용하여 다음 단계에서 정삭 공차를 차감합니다.
• 이 단계는 공회전 통과 수에 따라 반복됩니다.
• 각 추가 나사 회전에 대해 전체 연속 동작이 반복됩니다.

싸이클
9.5 선삭 가공 싸이클
9-352 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
파라메타에 대한 설명
그림 9-72
PO1 및 DM1(시작점 및 직경) 나사 시리즈의 초기 시작점을 정의하는 데 사용하는 파라메타입니다. 싸이클 자체에서 결정
되며 G0을 사용하여 접근되는 시작점은 프로그램한 시작점(앞 페이지의 그림에서 시작점 A)보다 런인(Runin) 경로만큼 앞쪽에 있습니다.
PO2, DM2 및 PO3, DM3(중간점 및 직경) 나사에서 두 개의 중간점을 정의하는 데 사용되는 파라메타입니다.
PO4 및 DM4(끝점과 직경) 나사의 원래 끝점은 PO4 및 DM4 파라메타를 사용하여 프로그램합니다. 내경 나사의 경우 DM1 ... DM4는 태핑 홀 직경입니다.
APP/ROP(런인/런아웃 경로) 상관 관계 하지만 싸이클에 사용되는 시작점은 런인 경로 APP만큼 앞으로 이동된 시작점이고, 따라서 프로그램된 끝점에서 런아웃 경로 ROP 만큼 뒤로 물러난 점이 끝점이 됩니다.
가로축에서, 싸이클에 의해 정의된 시작점은 항상 프로그램된 직경에서 1mm 위에 있습니다. 이 상승면은 제어 시스템 내에서 자동으로 생성됩니다.

싸이클
9.5 선삭 가공 싸이클
9-353 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
TDEP, FAL, NRC 및 NID(나사 깊이, 정삭 공차, 황삭 및 공회전 통과 수) 상관 관계 프로그램된 정삭 공차는 근축으로 작용하며, 지정된 나사 깊이 TDEP에서 차감되고, 그 결과
가 몇 개의 황삭 절삭으로 나뉩니다. 싸이클이 VARI 파라메타를 토대로 개별 절입 깊이를 자동으로 계산합니다. 나사 깊이를 일정한 절삭 단면을 사용하는 전진으로 분할할 때 절삭력은 황삭 절삭 구간에서 일정한 크기를 유지합니다. 이 경우에 절입 깊이에 대해 다양한 값을 적용
하여 전진이 수행됩니다.
두 번째 변형은 전제 나사 깊이를 일정한 절입 깊이로 분배하는 것입니다. 이 과정에서 절삭이 진행됨에 따라 절삭 단면이 커지지만 나사 깊이 값은 작아집니다. 이러한 기술로 인해 절삭 상태가 개선됩니다.
한 단계에서 황삭 후에 정삭 공차 FAL이 차감됩니다. 그런 다음 NID 파라메타 아래 프로그램
된 공회전 통과가 실행됩니다.
IANG(전진 각도)
그림 9-73
IANG 파라메타를 사용하여 나사에서 전진의 진행 각도를 정의합니다. 나사의 절삭 방향에 수
직으로 전진하려면 이 파라메타 값을 0으로 설정해야 합니다. 다시 말해서, 파라메타 목록에
서 IANG 파라메타를 생략할 수 있습니다. 이 경우에는 0이 기본값으로 자동 지정됩니다. 측
면을 따라 전진하려는 경우, IANG 파라메타의 절대값은 가장 크게 공구 측면각의 1/2 크기입
니다.
전진의 실행은 이 파라메타의 부호로 정의합니다. 양수 값을 사용하면 항상 동일한 측면에서
전진이 일어나고, 음수 값을 사용하면 두 측면을 교대하면서 전진합니다. 측면 교대식 전진 유
형은 원통형 나사에만 사용할 수 있습니다. 하지만 점감형 나사에서는 IANG 값이 음수일 때
한 측면을 따라 측면 전진이 수행됩니다.

싸이클
9.5 선삭 가공 싸이클
9-354 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
NSP(시작점 옵셋) 회전 부분의 원주에서 첫 번째 나사 회전의 절삭 점을 정의하는 각도 값을 프로그램하는 데 이 파라메타를 사용할 수 있습니다. 이 값이 시작점 옵셋입니다. 파라메타 값은 0.0001도부터 +359.9999도 사이 값입니다. 지정한 시작점 옵셋이 없거나 파라메타 목록에서 이 파라메타를 생략하면 자동으로 첫 번째 나사 회전이 0도 표시에서 시작됩니다.
PP1, PP2 및 PP3(나사 리드) 나사 시리즈의 세 구간에서 나사 리드 값을 정의하는 데 사용하는 파라메타입니다. 리드 값은 부호 없이 근축 값으로 입력해야 합니다.
VARI(가공 유형) VARI 파라메타를 사용하여 수행할 작업이 외경 절삭인지 또는 내경 절삭인지 여부와 황삭 가공에서 절입에 사용할 기술을 정의합니다. VARI 파라메타 값은 1 - 4 범위이며, 다음과 같은 의미를 갖습니다.
그림 9-74
값 내경/외경 일정 절입/일정 절삭 단면
1 외부 일정 절입
2 내경 일정 절입
3 외부 일정 절삭 단면
4 내경 일정 절삭 단면
VARI 파라메타에 대해 다른 값을 프로그램하면, 알람 61002 “가공 형식이 잘못 정의됨”이 표시되면서 싸이클이 중단됩니다.

싸이클
9.5 선삭 가공 싸이클
9-355 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
NUMT(나사 회전 수) NUMT 파라메타를 사용하여 다중 회전 나사의 나사 회전 수를 정의합니다. 단일 회전 나사의 경우, 파라메타 값을 0으로 지정하거나 파라메타 목록에서 완전히 삭제할 수 있습니다.
회전한 부분의 원주 전체에 나사 회전이 동일하게 분배됩니다.
원주 상에 비대칭 나사 회전 정렬을 사용한 다중 회전 나사를 제작하려면, 해당하는 시작점 옵셋을 프로그램할 때 각 나사 회전에 대한 싸이클을 호출해야 합니다.
그림 9-75
_VRT(가변 후진 경로) _VRT 파라메타에서 초기 나사 직경에 기초하여 후진 경로를 프로그램할 수 있습니다. _VRT = 0(파라메타가 프로그램되지 않은 경우)이면 후진 경로는 1mm입니다. 후진 경로는 항상 프로그램된 시스템 단위(인치 또는 미터법)에 따라 측정됩니다.
프로그램 작성 예제: 나사 체인
이 프로그램을 사용하여 원통형 나사로 시작하는 나사 체인을 제작할 수 있습니다. 나사에 수직으로 전진이 일어나며, 정삭 공차와 시작점 옵셋이 모두 프로그램되지 않습니다. 5번의 황삭 절삭과 한 번의 공회전 통과가 수행됩니다. 지정된 가공 유형은 일정한 절삭 단면을 사용하
는 수직, 외경 가공입니다.

싸이클
9.5 선삭 가공 싸이클
9-356 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
그림 9-76
N10 G95 T5 D1 S1000 M4 기술적 값 지정
N20 G0 X40 Z10 시작 위치로 접근
N30 CYCLE98 (0, 30, -30, 30, -60, 36, -80, 50, 10, 10, 0.92, , , , 5, 1, 1.5, 2, 2, 3, 1)
싸이클 호출
N40 G0 X55
N50 Z10
N60 X40
축별로 이동
N70 M2 프로그램 종료

싸이클
9.6 에러 메시지와 에러 처리
9-357 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.6 에러 메시지와 에러 처리
9.6.1 일반 사항 싸이클에서 에러 조건이 감지되면 알람이 생성되고 싸이클의 실행이 중단됩니다.
더 나아가 싸이클이 시스템의 메시지 표시줄에 에러 메시지를 표시합니다. 싸이클 메시지가 표시되어도 프로그램 실행은 중단되지 않습니다.
시스템의 작동에 관한 에러와 시스템의 메시지 표시줄에 나타나는 메시지에 대해서는 개별 싸이클과 연결하여 설명합니다.
9.6.2 싸이클에서 에러 처리
61000에서 62999 사이의 숫자가 지정된 알람이 싸이클에서 생성됩니다. 이 범위 숫자는 알람 응답 및 취소 기준에 따라 다시 나뉩니다.
알람 번호와 함께 표시되는 에러 텍스트가 에러의 원인에 대한 자세한 정보를 제공합니다. 표 9-21
알람 번호 삭제 기준 알람 응답
61000 ... 61999 NC_RESET NC에서 블럭 준비가 중단됩니다.
62000 ... 62999 삭제 키 블럭 준비가 중단됨. 알람를 지운 후 NC START를 다시 눌러 싸이클을 계속할 수 있습니다.
9.6.3 싸이클 알람 개요
에러 번호는 다음과 같이 분류됩니다.
6 _ X _ _
• X=0 일반 싸이클 알람
• X=1 드릴링, 드릴링 패턴 및 밀링 싸이클에 의해 생성되는 알람
• X=6 드릴링 싸이클에 의해 생성되는 알람
아래 표에 싸이클에서 발생되는 모든 에러가 발생 위치, 적절한 문제 정정 지침과 함께 나열되
어 있습니다.

싸이클
9.6 에러 메시지와 에러 처리
9-358 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
표 9-22
알람 번호 알람 텍스트 소스 설명, 해결 방법
61000 “공구 보정이 활성화되지 않음”
CYCLE93 ~ CYCLE96
싸이클 호출 전에 D 옵셋을 프로그램해야 합니다.
61001 “나사 리드가 틀림” CYCLE84 CYCLE840 CYCLE96 CYCLE97
파라메타를 검사하여 나사 크기 또는 리드 지정(상충) 여부를 확인하십시오.
61002 “가공 형식이 잘못 정의됨” CYCLE93 CYCLE95 CYCLE97
가공 유형을 정의하는 VARI 파라메타 값을 잘못 지정하였으므로 변경해야 합니다.
61101 “기준 평면이 잘못 정의됨” CYCLE81 ~ CYCLE89 CYCLE840
깊이를 상대 값으로 지정하는 경우 기준 평면과 후진 평면 값을 다르게 선택해야 하고, 그렇지 않으면 절대값으로 지정해야 합니다.
61102 “스핀들 방향이 프로그램되지 않음”
CYCLE88 CYCLE840
SDIR(또는 CYCLE840에서 SDR) 파라메타를 프로그램해야 합니다.
61107 “첫 번째 드릴링 깊이가 잘못 정의됨”
CYCLE83 첫째 드릴링 깊이가 총 드릴링 깊이에 상반됩니다.
61601 “가공된 소재 직경이 너무 작음”
CYCLE94 CYCLE96
정삭 부분의 직경이 너무 작습니다.
61602 “공구 너비가 잘못 정의됨” CYCLE93 프로그램한 홈 너비보다 절삭 공구가 큽니다.
61603 “홈 모양이 잘못 정의됨” CYCLE93 • 홈 베이스의 반경/모따기가 홈 너비와 일치하지 않습니다.
• 세로축에 평행인 형상 성분에서는 수평 가공 홈이 불가능합니다.
61604 “활성 공구가 프로그램된 형상을 벗어남”
CYCLE95 사용한 공구의 예리한 절삭 각도로 인해 릴리프 절삭 성분에서 형상을 벗어남. 다른 공구를 사용하거나 형상 서브루틴을 확인하십시오.
61605 “형상이 잘못 프로그램됨” CYCLE95 잘못된 릴리프 절삭 성분이 검출됨
61606 “형상 준비 에러” CYCLE95 형상 준비에서 에러가 발견되었습니다. 이 알람는 항상 NCK 알람 10930 ... 10934, 15800 또는 15810과 연결되어 발행됩니다.
61607 “시작점이 잘못 프로그램됨” CYCLE95 싸이클 호출 전에 도달한 시작점이 형상 서브루틴에서 설명한 사각형을 벗어납니다.
61608 “공구 방향이 잘못 프로그램됨”
CYCLE94 CYCLE96
언더컷 형태와 일치하는 공구점 방향 1...4를 프로그램해야 합니다.
61609 “형태가 잘못 정의됨” CYCLE94 CYCLE96
언더컷 형태의 파라메타를 확인하십시오.
61611 “교차점을 찾을 수 없음” CYCLE95 형상을 사용하여 교차점을 계산할 수 없었습니다. 형상 프로그램을 확인하거나 절입 깊이를 변경하십시오.

싸이클
9.6 에러 메시지와 에러 처리
9-359 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
9.6.4 싸이클 메시지
싸이클이 시스템의 메시지 표시줄에 자체 메시지를 표시합니다. 싸이클 메시지가 표시되어도
프로그램 실행은 중단되지 않습니다.
메시지의 싸이클의 일정한 작동에 관한 정보와 절삭 프로세스에 관한 정보를 제공하며, 절삭
단계가 종료된 후 또는 싸이클이 종료될 때가지 그대로 보존됩니다. 다음과 같은 메시지가 있
습니다.
표 9-23
메시지 텍스트 소스
“깊이: 상대 깊이 값에 따라 결정됨)” CYCLE82...CYCLE88, CYCLE840
“첫 번째 드릴링 깊이: 상대 깊이 값에 따라 결정됨” CYCLE83
“나사 회전 <번호> - 종형 나사로 가공” CYCLE97
“나사 회전 <번호> - 횡형 나사로 가공” CYCLE97
메지시 텍스트에서 “번호”는 항상 현재 가공되는 형상의 번호를 나타냅니다.

싸이클
9.6 에러 메시지와 에러 처리
9-360 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
메모

색인
색인-361 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판 6FC5398-1CP10-2LA0
색인
기호
“알람 삭제” 키, vi “Parameter(파라메타)” 조작 영역, 3-41
가
가공 파라메타, 9-264 가공 평면, 9-260 가공 프로그램, 선택, 시작, 5-73 가공 프로그램, 중지, 취소, 5-76 가용성 옵션, 1-16 공구 및 공구 옵셋 입력, 3-41 공구 영점, 3-51 공구 옵셋 측정, 3-44 기계 영점, 3-51 기준 평면, 9-268
나
나사 언더컷 - CYCLE96, 9-338 나사 절삭 - CYCLE97, 9-343 나사 체인 - CYCLE98, 9-350 네트워크 드라이브 구성, 1-31 네트워크 드라이브 연결 해제, 1-31 네트워크 연결 구성, 1-25 네트워크 작업, 1-25 네트워크 파라메타, 1-25
다
단축 키, 1-22 데이터 전송, 6-105 도움말 시스템, 1-23 드릴링 싸이클, 9-259 드릴링, 카운터보링, 9-271 디렉토리 공유, 1-30
라
리지드 태핑, 9-277 리콜 키, vi
마
메시지, 9-359 문자 세트, 8-150
바
반환 조건, 9-260 보링 1, 9-286 보링 2, 9-289 보링 3, 9-293 보링 4, 9-295 보링 5, 9-297 보링, 9-264 보링, 9-268 보정 척을 사용한 태핑, 9-280 블록 검색, 5-75 블록 형식, 8-149
사
사용자 관리, 1-28 사용자 로그인, 1-29 산술 변수, 3-56 상대 드릴링 깊이, 9-269 선삭 가공 싸이클, 9-259 선택 키/토글 키, vi 센터링, 9-268 셋팅 데이터, 3-53 수동 입력, 4-62 스톡 제거 싸이클 - CYCLE95, 9-325 시작 위치, 9-335 심공 드릴링, 9-273 싸이클 시뮬레이션, 9-261 싸이클 알람 개요, 9-357 싸이클 알람, 9-357 싸이클 지원 조작, 9-262 싸이클 파일 개요, 9-262 싸이클 호출, 9-260
아
안전 공차, 9-268 언더컷 각도, 9-308 언더컷 싸이클 - CYCLE94, 9-319 여러 개의 홀로 이루어진 행, 9-299 여러 개의 홀로 형성된 원, 9-304 워드 구조, 8-148 워크 옵셋, 3-51 인코더 없이 보정 척을 사용하여 태핑, 9-281 인코더와 보정 척을 사용한 태핑, 9-281 인터페이스 파라메타, 7-129 입력 키, vi 입력 화면 구성, 9-263

색인
색인-362 SINUMERIK 802D sl 선삭 가공 조작 및 프로그램(BP-D) 설명서, 2006년 10월판
6FC5398-1CP10-2LA0
자
절대 드릴링 깊이, 9-269 조그 모드, 4-58 조그, 4-58 조작 영역, 1-15 종형 나사, 9-348 좌표계, 1-35 기계 좌표계(MCS), 1-35 상대 좌표계, 1-36 공작물 좌표계(WCS), 1-36 주소, 8-148 중단 후 위치 재지정, 5-77
차
출력 가능한 특수 문자, 8-150 출력 불가능한 특수 문자, 8-151 취소 후 재실행, 5-77 칩 분쇄를 사용한 심공 드릴링, 9-274 칩 제거를 사용한 심공 드릴링, 9-274
타
통신 포트 사용, 1-27 평면 정의, 9-260 포켓 계산기, 1-16 프로그램 편집기에서 싸이클 지원, 9-262
하
핸드휠, 4-61 형상 모니터링, 9-308, 9-335 형상 정의, 9-333 형상 파라메타, 9-264 호출 조건, 9-260 호출, 9-265 홈 싸이클 - CYCLE93, 9-310 화면 레이아웃, 1-11 횡형 나사, 9-348 후진 평면, 9-268
C CONTPRON, 9-334 CYCLE81, 9-268 CYCLE82, 9-271 CYCLE83, 9-273 CYCLE84, 9-277 CYCLE840, 9-280 CYCLE85, 9-286 CYCLE86, 9-289 CYCLE87, 9-293 CYCLE88, 9-295
CYCLE89, 9-297 CYCLE93, 9-310 CYCLE94, 9-319 CYCLE95, 9-325 CYCLE96, 9-338 CYCLE97, 9-343 CYCLE98, 9-350
D Delete 키(백스페이스), vi
E Etc 키, vi
F Files 복사, 1-23 붙여넣기, 1-23
H HOLES1, 9-299 HOLES2, 9-304
M Machine(기계) 조작 영역, 4-58 MDA 모드, 4-62
N NC 프로그램 작성의 기본 원칙, 8-147
R RCS 도구, 1-34 RCS Log in(RCS 로그인), 1-29
S Shift 키, vi SPOS, 9-278, 9-279
U V.24 인터페이스, 6-105
고객 의견 수정 사항 해당 출판물/설명서: SINUMERIK 802D sl
To SIEMENS AG A&D MC MS1 Postfach 3180
D-91050 Erlangen (전화: +49 (0) 9131 98 - 63315 [직통 전화]
mailto:[email protected]
http://www.siemens.com/automation/service&support
사용자 설명서
발신: 이름
조작 및 프로그램 설명서 니블링
주문 번호: 6FC5398-1CP10-2LA0 2006년 10월판
회사/부서. 주소
우편 번호: 시:
전화 번호: /
팩스 번호: /
설명서에서 인쇄상 오류가 발견되면 이 양식을 이용하여 SIEMENS AG로 알려주시기 바랍니다.
개선을 위한 제안 사항도 언제든지 환영합니다.
고객 의견 또는 수정 사항








![소프트웨어 팩 조작 설명서 - FUJI XEROX · 2012. 12. 21. · [Fuji Xerox 설치 메뉴]로부터 설치 2 2.2설치된 프린터 아이콘의 삭제 (](https://img.pdfslide.tips/doc/110x75/60b0cf504c765b1f7c32c1d7/oe-oe-eoe-fuji-xerox-2012-12-21-fuji-xerox-.jpg)





![PC8105 / PC8110 / PC8115 난삭재 터닝 가공용 인써트KR).pdf[ KORLOY (10pass 가공 후) ] [ 타사 ] [ 타사 (300pass 가공 후) ] [ 타사 (7pass 가공 후) ] VP1 칩브레이커는](https://img.pdfslide.tips/doc/110x75/5b021f3f7f8b9a952f8f6ef4/pc8105-pc8110-pc8115-krpdf-korloy-10pass.jpg)