Embed Size (px)
Citation preview

5/25/2011
1
:بخش هفتم فرآیندهای مارکوف
1
مارکوف (گسسته) ناپیوسته های زنجیره (Discrete Markov Chains) اگر اما .بودیم کرده نظر صرف تعمیرات از یا و بودیم گرفته نظر در تعمیرناپذیر را ها سیستم تاکنون
تعمیر حالت در را زمان از بخشی سیستم) باشد توجه قابل کارکرد زمان به نسبت تعمیر و خرابی زمان .شود می استفاده مارکوف روش از (باشد
اتفاقی رفتار یعنی باشد، حافظه بدون سیستم باید کرد استفاده مارکوف روش از بتوان آنکه برای رفتار دیگر عبارت به .گذشته زمان به نه باشد داشته بستگی آن حال وضعیت به فقط آینده در سیستم زمان همه در دیگر های وضعیت به آن وضعیت تبدیل احتمال و بوده یکسان ها زمان همه در سیستم
(Stationary یا ایستا سیستم یا ثابت خرابی نرخ) باشد ثابت ها
است غیرمارکوف سیستم نباشد، ثابت زمان در سیستم رفتار و نبوده برقرار فوق شرط اگر
مارکوف های سیستم برای کلی شرط سه: یا (وضعیت تغییر برای ثابت احتمال) سیستم رفتار سکون Stationary بودن
(گذشته به وابستگی عدم) اتفاقی فرآیندهای برای حافظه نبود تشخیص قابل و مشخص های حالت وجود (Identified States)
2

5/25/2011
2
مارکوف فرآیند سازی مدل در کلی مفاهیم
حالته دو سیستم برای گسسته مارکوف مدل
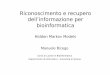
درختی نمودار از استفاده با سیستم رفتار نمایش
زیر صورت به 1 حالت از شروع با زمانی دامنه یا مرحله سه طی سیستم محتمل های حالت احتمال :است
حاصلضرب با برابر ها انشعاب از شاخه هر احتمال
شاخه آن مراحل احتمال
باشیم 1 حالت در زمانی مرحله سه از بعد آنکه احتمال:
1
8+
1
16+
1
16+
3
32=
11
32
3
1
2
1
2
1
2
1
2
1
2
1
2
1/2
1/2
3/4
3/4
1/2
1/2
1/4
1/41
1/2
1/2
2
1/4
3/4
1
1/2
1/2
1 2 3
1/8
1/16
1/16
3/32
1/2
1/4
3/41/2 1 2
یا زمان از مستقل احتماالت مقادیر) حدی مقدار یک به مراحل تعداد افزایش با حالت، هر در سیستم گرفتن قرار احتمال بنابراین
Time Independent Values of Probability) شرایط دارای های سیستم اکثر خصوصیت این .است کرده میل .است مارکوف
حدی، مقادیر به رسیدن در تغییرات روند و (شود شروع حالتی چه از یعنی) دارد اولیه شرایط به بستگی سیستم گذرای رفتار سیستم به .است اولیه ازشرایط مستقل کامال ها حالت احتماالت حدی مقادیر اما .دارد نیز ها حالت احتمال مقادیر به بستگی
.میشود گفته Ergodic های سیستم ویژگی، این با هاییجذبی یا ماندگار های حالت دارای) ندارد وجود آن از خروج امکان حالت، یک به ورود از پس که هایی سیستم در
Absorbing States نامند می ارگودیک غیر را ها سیستم این و نیست برقرار حدی مقادیر (هستند. احتمال حدی مقادیر و ها حالت احتمال محاسبه برای درختی نمودار از استفاده زیاد، مراحل تعداد یا بزرگ های سیستم برای
.شود می استفاده تصادفی حالت تغییر احتماالت ماتریس از معموال و است دشوار ها حالت4

5/25/2011
3
اتفاقی یا تصادفی حالت تغییر احتماالت ماتریس (Stochastic Transitional Probability Matrix) .هستند دیگر حالت به حالت یک از سیستم های حالت تغییر احتمال دهنده نشان آن، عناصر که است ماتریسی
:قبلی سیستم برای
𝑃 =𝑃11 𝑃12𝑃21 𝑃22
=12
12
14
34
Pi,j: حالت از سیستم تغییر احتمال i حالت به j زمانی مرحله یک از پس
:زمانی مرحله دو طی از پس حالت هر در سیستم قرارگرفتن احتمال
= 𝑃2 =𝑃11 𝑃12𝑃21 𝑃22
2
=38
58
516 11
16
زمانی مرحله n از پس i وضعیت از شروع با j وضعیت در سیستم گرفتن قرار احتمال
= 𝑃𝑛 =𝑃11 𝑃12𝑃21 𝑃22
𝑛
باید نباشد، قطعی شروع، در سیستم حالت اگر Pn اولیه شرایط احتمال بردار در ضرب را (P0) کنیم. 𝑃0 = 𝑃1 𝑃2
دوم مرحله در اولیه شرایط احتمال بردار تأثیر:
𝑃0 = 1 0 ⟹ 𝑃 2 = 𝑃0𝑃2 = 1 0 ∙
38
58
516 11
16 =
3
8
5
8
𝑃0 =1
2
1
2 ⟹ 𝑃 2 = 𝑃0𝑃
2 = 1
2
1
2∙
38
58
516 11
16 =
11
32
21
32
5
ها حالت حدی احتماالت تعیین ها ماتریس ضرب آنها، محاسبه برای راه یک باشد، ها حالت احتمال برای حدی مقادیر دارای و بوده ارگودیک سیستم اگر
(گیر وقت روش) .کند میل ثابت تقریبا عدد یک به نهایت در تا است زیاد تعداد بهدهد نمی رخ ها حالت احتمال بردار در تغییری حدی، های حالت در که است اساس این بر دیگر، روش:
𝛼𝑃 = 𝛼
قبل سیستم در
𝑃1 𝑃2 ∙12
12
14
34 = 𝑃1 𝑃2
⟹
1
2𝑃1 +
1
4𝑃2 = 𝑃1
1
2𝑃1 +
3
4𝑃2 = 𝑃2
⟹ −1
2𝑃1 +
1
4𝑃2 = 0
1
2𝑃1 −
1
4𝑃2 = 0
دیگر، رابطه .هستند رابطه یک واقع در باال رابطه دو P1+P2=1 بنابراین .است:
−
1
2𝑃1 +
1
4𝑃2 = 0
𝑃1 + 𝑃2 = 1 ⟹ 𝑃1 =
1
3 , 𝑃2=
2
3 ⟹ 𝛼 =
1
3
2
3
6

5/25/2011
4
جذبی یا ماندگار های حالت (Absorbing States) حالت از یکی از شروع با جدیدی مأموریت آنکه مگر نیست میسر حالت آن از سیستم خروج امکان آنها، وقوع با که هستند هایی حالت
.شود آغاز غیرماندگار هایبه را آن وقوع احتمال باید و شود می محسوب شکست هایی حالت چنین به رسیدن هستند، مأموریت انجام ویژه که هایی سیستم در
.رساند حداقلجذبی های حالت این وارد سیستم آنها از قابل تا که است زمانی مراحل از قبولی قابل تعداد به دستیابی اطمینان، قابلیت الزامات از یکی
(کند می عمل ها حالت این به رسیدن از قبل سیستم که دفعاتی متوسط تعداد) نشوداحتمال زمانی، مراحل دفعات تعداد افزایش با باشد ماندگار حالت ،2 حالت و کنیم شروع 1 حالت از اگر قبل، سیستم در مثال عنوان به
که است آن مهم بنابراین ( 0=1 حالت در ماندن باقی احتمال) یابد می وقوع 2 حالت سرانجام و یابد می کاهش 1 حالت در ماندن باقی شود تعیین 2 حالت به ورود از قبل مراحل تعداد
اگر P ماتریس باشد، تصادفی حالت تغییر احتماالت ماتریس Q به) .شود می تشکیل ماندگار های حالت مربوطبه ستون و سطر حذف با (شد خواهد Q=[P11] :باشد جذبی ،2 حالت اگر دارد، حالت دو که قبل سیستم برای مثال عنوان
ماتریس Q را ماند می باقی ها حالت این از یکی در سیستم که دفعاتی انتظار مورد تعداد اگر است گذرا های حالت مجموعه دهنده نشان .شد خواهد تعیین جذبی حالت به رسیدن از قبل مطلوب های حالت تعاد کنیم، محاسبه
که کرد اثبات توان می
N=[I-Q]-1
که N، برسد ماندگار حالت به غیرماندگار مشخص حالت یک از شروع با سیستم تا کشد می طول که است دفعاتی انتظار مورد مقدار.
باشد ماندگار 2 حالت اگر قبل، سیستم در :1 مثال:
.برسیم ماندگار حالت به تا کشد می طول زمانی مرحله دو متوسط طور به ،1 حالت از شروع با
کنید تکرار را محاسبات باشد، ماندگار ،1 حالت اگر :تمرین.
7
زیر حالت فضای با سیستمی برای ها حالت حدی احتمال محاسبه :2مثال
مرحله 4 متوسط طور به ،3 ماندگار حالت به رسیدن از قبل کند، کار به شروع 1 حالت از سیستم اگر یعنی (N11) .بود خواهد 2 حالت در (N12) مرحله 2 و 1 حالت در
(N21) مرحله صفر متوسط طور به ،3 ماندگار حالت به رسیدن از قبل کند، کار به شروع 2 حالت از سیستم اگر و .بود خواهد 2 حالت در (N22) مرحله 2 و (ندارد وجود راهی 1 به 2 از چون) 1 حالت در
8
1/2
1/3
1
32
1/41/3

5/25/2011
5
می پر آب از روز هر مخزن .میشود استفاده پمپ دو از آن کردن پر برای که داریم مخزن یک :مثال توانیم می جدید پمپ از استفاده از پس اما .شود نمی استفاده متوالی روز دو در قدیمی پمپ از .گردد
(تاس یا سکه پرتاب با مثال) .کنیم استفاده جدید یا قدیمی پمپ از
روز دو از پس جدید پمپ از استفاده احتمال :الف
:باشیم کرده استفاده قدیمی پمپ از اول روز در اگر
:باشیم کرده استفاده جدید پمپ از اول روز در اگر
است؟ چگونه حدی احتماالت طوالنی، مدت گذشت از بعد :ب
کنیم، استفاده را جدید پمپ بیاید 2 اگر که ببریم کار به تاس یک اول، روز در پمپ انتخاب در اگر :ج است؟ چقدر روز 2 از پس جدید پمپ از استفاده احتمال
ج؟ قسمت در ها حالت حدی احتمال :د
9
مارکوف پیوسته فرآیندهای
زمانی مراحل در را سیستم های حالت تغییر (مارکوف گسسته فرآیندهای) قبل قسمت های سیستم در زمان طول در را سیستم حالت تغییر پیوسته، فرآیندهای حالت در اما .گرفتیم نظر در (گسسته های بازه)
.کنیم می بررسی
نرخ) تعمیرات انجام یا و خرابی وقوع شرطی احتمال باید تعمیرپذیر های سیستم در حالت، این در البته و کارافتادگی از حالتهای در سیستم رفتار یعنی .بماند ثابت معین زمانی بازه هر برای (تعمیر و خرابی (سیستم رفتار سکون) شود می توصیف (منفی) نمایی توزیع تابع توسط تعمیر
𝑇𝑟𝑎𝑛𝑠𝑖𝑡𝑖𝑜𝑛 𝑟𝑎𝑡𝑒 آهنگ تغییر حالت یا نرخ = تعداد دفعات تغییر از یک حالت
کل زمانی که سیستم در آن حالت طی نموده است
نرخ خرابی = تغییر از حالت سالم سیستم در یک محدوده زمانی تعداد از کار افتادگی
سالم بوده است مدت زمانی که در آن، سیستم در حال کار
نرخ تعمیر = تغییر از حالت خرابی سیستم در یک محدوده زمانی تعداد تعمیر
مدت زمانی که در آن، سیستم در حال تعمیر (خراب) بوده است
10

5/25/2011
6
زمان به وابسته احتماالت تعیین تعمیرپذیر عضو یک برای: λ: (زمان واحد در خرابی ها تعداد) خرابی نرخ، MTTF=1/λ
μ: (زمان واحد در تعمیرات تعداد) تعمیر نرخ، MTTR=1/μ
P0(t): زمان در عملکرد احتمال t (0 حالت در استقرار احتمال) و P1(t) : زمان در بودن افتاده کار از احتمال t (1 حالت در استقرار احتمال) f0(t)=λe-λt: و سیستم خرابی احتمال چگالی تابع f1(t)=μe-μt: سیستم تعمیر احتمال چگالی تابع
کوچک زمانی بازه اگر dt بنابراین .است پوشی چشم قابل آن در حالت تغییر چند یا دو همزمان وقوع احتمال بگیریم، نظر در را :با است برابر t+dt زمان در 0 حالت در سیستم داشتن قرار احتمال
ندهد رخ خرابی dt زمانی بازه در و باشد (سالم) 0 حالت در t زمان در سیستم آنکه احتمال :شود تعمیر dtزمانی بازه در و باشد (خراب) 1 حالت در t زمان در سیستم آنکه احتمال +
P0(t+dt)=P0(t)(1-λdt) + P1(t)μdt :برابر است با t+dtدر زمان 1مشابه، احتمال قرار داشتن سیستم در حالت طور به
نشود تعمیر dt زمانی بازه در و باشد (خراب) 1 حالت در t زمان در سیستم آنکه احتمال :شود خراب dt زمانی بازه در و باشد (سالم) 0 حالت در t زمان در سیستم آنکه احتمال +
P1(t+dt)=P1(t)(1-μdt) + P0(t)λdt
⟹ 𝑃0 𝑡 + 𝑑𝑡 − 𝑃0(𝑡)
𝑑𝑡= −𝜆𝑃0 𝑡 + 𝜇𝑃1 𝑡 ⟹ 𝑃0
′(𝑡) = −𝜆𝑃0 𝑡 + 𝜇𝑃1 𝑡
𝑃1 𝑡 + 𝑑𝑡 − 𝑃1(𝑡)
𝑑𝑡= −𝜆𝑃0 𝑡 + 𝜇𝑃1 𝑡 ⟹ 𝑃1
′ 𝑡 = −𝜇𝑃1 𝑡 + 𝜆𝑃0 𝑡
(⟹ 𝑃0′ 𝑡 = −𝑃1
′ 𝑡 )
:رابطه ماتریسی شکل
𝑃0′ 𝑃1
′ = 𝑃0 𝑃1 ∙−𝜆 𝜆𝜇 −𝜇
11
0
( )
1
( )
λ
µ
الپالس تبدیل از استفاده با معادله حل:
𝑆𝑃0 𝑠 − 𝑃0 0 = −𝜆𝑃0 𝑠 + 𝜇𝑃1 𝑠 ⟹ 𝑃0 𝑠 =𝜇
𝑆+𝜆𝑃1 𝑠 +
1
𝑆+𝜆𝑃0 0
:به طور مشابه
𝑆𝑃1 𝑠 − 𝑃1 0 = −𝜇𝑃1 𝑠 + 𝜆𝑃0 𝑠 ⟹ 𝑃1 𝑠 =𝜆
𝑆 + 𝜇𝑃0 𝑠 +
1
𝑆 + 𝜇𝑃1 0
مجهولی دو معادله دو دستگاه حل
⟹
𝑃0 𝑠 =𝜇
𝜆+𝜇
𝑃0 0 +𝑃1 0
𝑆+
1
𝜆+𝜇∙
1
𝑆+𝜆+𝜇𝜆𝑃0 0 − 𝜇𝑃1 0
𝑃1 𝑠 =𝜆
𝜆+𝜇
𝑃0 0 +𝑃1 0
𝑆+
1
𝜆+𝜇∙
1
𝑆+𝜆+𝜇𝜆𝑃1 0 − 𝜆𝑃0 0
⟹
𝑃0 𝑡 =𝜇
𝜆+𝜇𝑃0 0 + 𝑃1 0 +
𝑒− 𝜆+𝜇 𝑡
𝜆+𝜇𝜆𝑃0 0 − 𝜇𝑃1 0
𝑃1 𝑡 =𝜆
𝜆+𝜇𝑃0 0 + 𝑃1 0 +
𝑒− 𝜆+𝜇 𝑡
𝜆+𝜇𝜆𝑃1 0 − 𝜆𝑃0 0
:است، لذا داریم P0(0)+P1(0)=1چون همواره
⟹
𝑃0 𝑡 =𝜇
𝜆 + 𝜇+ 𝑒− 𝜆+𝜇 𝑡
𝜆 + 𝜇𝜆𝑃0 0 − 𝜇𝑃1 0
𝑃1 𝑡 =𝜆
𝜆 + 𝜇+
𝑒− 𝜆+𝜇 𝑡
𝜆 + 𝜇𝜆𝑃1 0 − 𝜆𝑃0 0
12

5/25/2011
7
یعنی است، (سالم) 0 حالت در سیستم شروع، در معموال: P1(0)=0 و P0(0)=1. بنابراین:
:باشد سالم حالت در t=0 در سیستم اگر (زمان حسب بر) سالم حالت در سیستم داشتن قرار احتمال
𝑃0 𝑡 =𝜇
𝜆 + 𝜇+
𝜆
𝜆 + 𝜇𝑒− 𝜆+𝜇 𝑡
:باشد خرابی حالت در t=0 در سیستم اگر (زمان حسب بر) تعمیر حالت در سیستم داشتن قرار احتمال
𝑃1 𝑡 =𝜆
𝜆+𝜇−
𝜆
𝜆+𝜇𝑒− 𝜆+𝜇 𝑡
ها حالت احتمال حدی مقادیر تعیین:
t) هستند اولیه شرایط از مستقل حدی احتماالت دارای نیز مارکوف پیوسته فرآیند های حالت ارگودیک، سیستم برای :(کند میل بینهایت سمت به
𝑡 → ∞ ⟹
𝑃0 ∞ = 𝑃𝑢𝑝 =𝜇
𝜆+𝜇
𝑃1 ∞ = 𝑃𝑑𝑜𝑤𝑛 =𝜆
𝜆+𝜇
داشتیم قبال : 𝑀𝑇𝑇𝐹 = 𝑚 =1
𝜆 , 𝑀𝑇𝑇𝑅 = 𝑟 =
1
𝜇 ⟹ 𝑃0 =
𝑚
𝑚+𝑟 , 𝑃1 =
𝑟
𝑚+𝑟
به معموال P0 سیستم پذیری دسترس (Availability) به و P1 ناپذیری دسترس (Unavailability) .شود می گفته
𝐴 = 𝑃0 ∞ =𝜇
𝜆+𝜇
13
اطمینان قابلیت با پذیری دسترس که شود توجه (Reliability) دارد تفاوت. R(t): حالت در سیستم ماندن احتمال یعنی up زمان تا t (مداوم صورت به) در شروع، لحظه در سیستم آنکه بر مشروط (R(t)=e-λt) .باشد کار حالت
A(t) : حالت در سیستم (داشتن قرار) ودنب احتمال یعنی up زمان در t حالت در شروع، لحظه در سیستم آنکه بر شروطم .باشد کار
A : حالت در سیستم (داشتن قرار) ودنب احتمال یعنی up زمان در t (چه در شروع، لحظه در سیستم آنکه از مستقل
(.باشد حالتی تعیین برای دیگر راه :نکته P0 و P1 (ها حالت احتمال حدی مقادیر) احتماالت تغییر که است این ماندگار، حالت در
.کند می میل صفر سمت به P'1(t) و P'0(t) آنکه یعنی حدی
معادالت دیفرانسیل ∶ 𝑃0
′ = −𝜆𝑃0 + 𝜇𝑃1 = 0
𝑃1′ = −𝜇𝑃1 + 𝜆𝑃0 = 0
, 𝑃0 + 𝑃1 = 1 ⟹ 𝑃0 =𝜇
𝜆+𝜇 , 𝑃1 =
𝜆
𝜆+𝜇
14
time
A(t)R (t)

5/25/2011
8
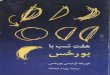
حالت فضای نمودار (State Space Diagram) .شود می استفاده مارکوف پیوسته فرآیندهای تحلیل در بیشتر سهولت منظور به
سیستم چند برای مثال
تعمیرپذیر عضوی تک سیستم
حالته سه تعمیرپذیر عضوی تک سیستم
ایجاد سیستم اجزای وضعیت در مستقل تغییر یک فقط دیگر، حالت به حالت یک از حالت تغییر هر در :توجه .است ناچیز dt زمانی بازه در همزمان تغییر چند احتمال یعنی .شود می
15
1
( )
2
( )
λ
µ
2
( )
3
( )
λ2
µ2
1
( )
λ1
µ1 λ3
µ3
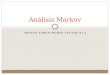
غیرمشابه عضوهای با تعمیرپذیر عضوی دو سیستم
:ها ویژگی است حالت چهار ها حالت تعداد. متناظر های حالت اما) ندارد بستگی سری یا موازی شبکه نوع به حالت فضای نمودار (دارد بستگی بودن موازی یا سری نوع به بودن، سالم یا خرابی با
سری شبکه
موازی شبکه
است نشده منظور که دیگر های حالت برخی یا و شود حذف حالت فضای مدل از باید که نباشد پذیر امکان ها حالت تغییر از برخی عمل در است ممکن
.شود اضافه باید
مشترک افتادگی کار از است ممکن فوق سیستم در مثال عنوان به
(Common mode failure) باشد پذیر امکان عضو دو (همزمان)
نشود شروع 1 عضو از قبل 2 عضو تعمیر است ممکن یا و
(μ2 شود حذف نمودار از باید 2 به 4 حالت از)
16
1
2
1
2
λ1
µ1
1
2
λ2 µ2 λ2µ2
1
2 µ1
λ1
1 2
43
1
2
1
2
λ1
µ1
1
2
λ2 µ2 λ2µ2
1
2 µ1
λ1
1 2
43
λc
1
2
1
2
λ1
µ1
1
2
λ2 µ2 λ2µ2
1
2 µ1
λ1
1 2
43

5/25/2011
9
غیرمشابه عضوهای با تعمیرپذیر عضوی دو سیستم
(ادامه) :ها ویژگی
(شود می حالته سه سیستم به تبدیل) کرد ادغام را یکسان های حالت توان می باشند مشابه سیستم عضو دو هر اگر
شود می مشکل نمودار رسم و یابد می افزایش ها حالت تعداد سیستم، اجزای تعداد افزایش با.
تا کرد نظر صرف دارند کمی وقوع احتمال مهندسی تشخیص و تجربه اساس بر که سیستم های حالت برخی از توان می یا حالت این در (... و موازی و سری) کرد استفاده سازی معادل اساس بر تقریبی های روش از یا و شود کمتر سیستم های حالت
17
1
2
1
2
λ1
µ1
1
2
λ2 µ2 λ2µ2
1
2 µ1
λ1
1 2
43
2λ
µ
λ
2µ
1 2 3
تعمیرپذیر عضوی سه سیستم
کنید رسم را حالت فضای نمودار باشند مشابه عضو سه اگر :تمرین.
18
1 U
2 U
3 D
1 U
2 D
3 U
1 D
2 U
3 U
1 D
2 D
3 U
1 U
2 D
3 D
1 D
2 U
3 D
1 D
2 D
3 D
1 U
2 U
3 Uµ1
λ3
µ2
λ2
λ1
µ3
µ2
λ2λ3
µ3µ3
λ3
µ2
λ2
λ1
µ1µ3
λ3
µ1
λ1

5/25/2011
10
مازاد عضو با سیستم: باشد نقص بدون کلیدزنی اگر:
ندارد وجود تعمیر گذرای حالت ها سیستم این در (تعمیرناپذیر) مأموریت ویژه های سیستم
توان می را سیستمها این احتماالت .نیست ارگودیک سیستم ندارد وجود حالتها بین ارتباط امکان ها سیستم این در چون
سایر برای و یک ماندگار های حالت حدی احتمال که است واضح البته .کرد تعیین مارکوف فرآیندهای های روش همانند 19 .بود خواهد صفر غیرماندگار های حالت
A
B O : Operating
S : Stand by
F : Fail A: O
B: F
A: F
B: F
λA
µA
A: F
B: O
µB λBµB
A: O
B: S µA
λA
1 2
43
2λ
λ
1 2 3
تصادفی حالت تغییر احتماالت ماتریس: توانیم می کنیم استفاده ماتریس این از (گسسته فرآیند) قبل بخش همانند بتوان آنکه برای ایم گرفته نظر در پیوسته را فرآیند اینجا در چون می را پیوسته فرآیند لذا .شود نظر صرف و باشد ناچیز آن در حالت تغییر یک از بیش احتمال که کنیم فرض کوچک آنقدر را Δt زمانی بازه :کرد سازی گسسته توان
λΔt : احتمال خرابی در بازه زمانیΔt 1و- λΔt : احتمال عدم خرابی در بازه زمانیΔt
μΔt : احتمال تعمیر در بازه زمانیΔt 1و- μΔt : احتمال عدم تعمیر در بازه زمانیΔt
: در اینصورت برای سیستم یک عضوی داریم
𝑃 =1 − 𝜆Δ𝑡 𝜆Δ𝑡𝜇Δ𝑡 1 − 𝜇Δ𝑡
حالت تغییر احتمال ماتریس از استفاده با را ها حالت حدی احتمال نیز پیوسته فرآیندهای برای توان می گسسته، فرآیندهای همانند حال :داریم حالته دو عضو یک دارای سیستم برای مثال عنوان به .کرد تعیین تصادفی
𝑃1 𝑃2 ∙1 − 𝜆Δ𝑡 𝜆Δ𝑡𝜇Δ𝑡 1 − 𝜇Δ𝑡
= 𝑃1 𝑃2 ⟹ (1 − 𝜆Δ𝑡)𝑃1 + (𝜇Δ𝑡)𝑃2 = 𝑃1𝜆Δ𝑡 𝑃1 + 1− 𝜇Δ𝑡 𝑃2 = 𝑃2
⟹ −𝜆Δ𝑡𝑃1 + 𝜇Δ𝑡𝑃2 = 0𝜆Δ𝑡𝑃1 − 𝜇Δ𝑡𝑃2 = 0
⟹ −𝜆𝑃1 + 𝜇𝑃2 = 0𝜆𝑃1 − 𝜇𝑃2 = 0𝑃1 + 𝑃2 = 1
⟹
𝑃1 =𝜇
𝜆 + 𝜇
𝑃2 =𝜆
𝜆 + 𝜇
را می توان از دستگاه معادالت حذف کرد برای سهولت در فرموله کردن ماتریس اولیه نیز می توان آن را حذف کرد و Δtچون : یعنی. ماتریس احتماالت تغییر حالت تصادفی را مستقیما بر حسب آهنگ تغییر حالت تشکیل داد
𝑃 =1 − 𝜆 𝜆𝜇 1 − 𝜇
خرابی نرخ) نیست ها حالت احتمال حسب بر زیرا نیست تصادفی حالت تغییر احتماالت ماتریس برای کاملی شکل ماتریس این البته ماتریس این از که صورتی در .دارد کاربرد ها حالت حدی احتمال محاسبه برای فقط P از شکل این و (نیستند احتمال تعمیر، یا
.شود لحاظ آن در نیز Δt باید شود استفاده گذرا حالت احتماالت تقریبی تعیین برای گسسته
20

5/25/2011
11
مشابه عضوهای با تعمیرپذیر دوعضوی سیستم
𝑃 =1 − 2𝜆 2𝜆 0𝜇 1 − 𝜆 − 𝜇 𝜆0 2𝜇 1 − 2𝜇
⟹ 𝑃1 𝑃2 𝑃3 ∙ 𝑃 = 𝑃1 𝑃2 𝑃3 ⟹ ⋯ ⟹
𝑃1 =𝜇2
𝜆 + 𝜇 2
𝑃2 =2𝜆𝜇
𝜆 + 𝜇 2
𝑃3 =𝜆2
𝜆 + 𝜇 2
:هستند افتادن کار از با معادل 3 و 2 های حالت و است عملکرد حالت با معادل 1 حالت باشند سری عضوها فوق، سیستم در اگر حال
𝐴 = 𝑃1 =𝜇2
𝜆 + 𝜇 2 , 𝑈 = 𝑃2 + 𝑃3 =
2𝜆𝜇 + 𝜆2
𝜆 + 𝜇 2
𝜇) آنها A سری، حالت در باشند مستقل عضوها اگر که کرد استدالل هم صورت این به میتوان البته
𝜆+𝜇 حالت در و میشود ضرب هم در (
.شود می ضرب هم در آنها U موازی،
:است افتادن کار از با معادل 3 حالت و عملکرد حالت 2و 1 های حالت باشد، موازی سیستم اگر اما
𝐴 = 𝑃1 + 𝑃2 =𝜇2+2𝜆𝜇
𝜆+𝜇 2 , 𝑈 = 𝑃3 =𝜆2
𝜆+𝜇 2 21
2λ
µ
λ
2µ
1 2 3
زمان حسب بر ها حالت احتمال تعیین: .کنیم محاسبه را ها حالت احتمال توانیم می هم اینجا در دادیم، انجام حالته دو عضوی یک سیستم مورد در که کاری مشابه
P1(t): زمان در عضو دو هر عملکرد احتمال t P2(t) زمان در عضو یک عملکرد احتمال t زمان این در دیگر عضو افتادن کار از و
P3(t): زمان در عضو هردو افتادن کار از احتمال t
P1(t+dt)= dt و عدم خرابی در زمان t احتمال سالم بودن هر دو عضو در زمان
+ dt و تعمیر شدن آن در زمان t احتمال خراب بودن یک عضو در زمان
+ dt و تعمیر هردوی آنها در زمان t زماناحتمال خراب بودن هر دو عنصر در
= P1(t)×(1-2λdt)+P2(t)×μdt+P3(t)×0
:و به همین ترتیبP2(t+dt)= P1(t)×2λdt+P2(t)×(1-(λ+μ)dt(+P3(t)×2μdt
وP3(t+dt)= P1(t)×0+P2(t)×λdt+P3(t)× (1-2μdt)
:به صفر میل کند به روابط زیر می رسیم dtمشابه قبل هنگامی که
𝑃1′(𝑡) 𝑃2
′(𝑡) 𝑃3′(𝑡) = 𝑃1(𝑡) 𝑃2(𝑡) 𝑃3(𝑡) ∙
−2𝜆 2𝜆 0𝜇 −(𝜆 + 𝜇) 𝜆0 2𝜇 −2𝜇
,
𝑃1 0 = 1
𝑃2 0 = 0
𝑃3 0 = 0
22

5/25/2011
12
تعیین عبارت های کسری احتمال حالت ها و استفاده از الپالس معکوس داریمبا استفاده از تبدیل الپالس و:
P1 t =𝜇2
𝜆 + 𝜇 2 +2𝜆𝜇
𝜆 + 𝜇 2 𝑒− 𝜆+𝜇 𝑡 +
𝜆2
𝜆 + 𝜇 2 𝑒−2 𝜆+𝜇 𝑡
P2 t =2𝜆𝜇
𝜆 + 𝜇 2 +2𝜆 𝜆 − 𝜇
𝜆 + 𝜇 2 𝑒− 𝜆+𝜇 𝑡 −2𝜆2
𝜆 + 𝜇 2 𝑒−2 𝜆+𝜇 𝑡
P3 t =𝜆2
𝜆 + 𝜇 2 −2𝜆2
𝜆 + 𝜇 2 𝑒− 𝜆+𝜇 𝑡 +
𝜆2
𝜆 + 𝜇 2 𝑒−2 𝜆+𝜇 𝑡
نکات:
:است محاسبه قابل بینهایت سمت به t گرفتن نظر در با ها حالت حدی احتمال -1
𝑃1 =𝜇2
𝜆 + 𝜇 2 , 𝑃2 =2𝜆𝜇
𝜆 + 𝜇 2 , 𝑃3 =𝜆2
𝜆 + 𝜇 2
روش از استفاده بنابراین .است پیچیده و مفصل نیز عضوی دو سیستم برای حتی ها حالت زمانی های احتمال عبارت -2 :بود خواهد تر مناسب شود می P ماتریس در ضرب مرحله هر در ها حالت احتمال آن، در که عددی های
𝑃1(𝑡) 𝑃2(𝑡) 𝑃3(𝑡) ∙1 − 2𝜆∆𝑡 2𝜆∆𝑡 0𝜇∆𝑡 1 − (𝜆 + 𝜇)∆𝑡 𝜆0 2𝜇∆𝑡 1 − 2𝜇∆𝑡
= 𝑃1(𝑡 + ∆𝑡) 𝑃2(𝑡 + ∆𝑡) 𝑃3(𝑡 + ∆𝑡)
23
های حالت یا حالت عضوها، بودن موازی یا سری اساس بر باید (R(t) محاسبه) سیستم اطمینان قابلیت ارزیابی برای -3 .کنیم تعیین را سیستم صحیح عملکرد یا افتادگی کار از با متناظر
آن به مربوط سطر حذف با و است (جذبی) ماندگار حالت ،3 حالت بنابراین .است U=P3 و A=P1+P2 :موازی سیستم در :داریم P ماتریس از
𝑃1′ 𝑃2
′ 𝑃3′ = 𝑃1 𝑃2 𝑃3 ∙
−2𝜆 2𝜆 0𝜇 − 𝜆 + 𝜇 𝜆0 0 0
⟹
𝑃1′ = −2𝜆𝑃1 + 𝜇𝑃2
𝑃2′ = 2𝜆𝑃1 − (𝜆 + 𝜇)𝑃2
𝑃3′ = 𝜆𝑃2
:داریم P2(t)و P1(t)با حل دستگاه با استفاده از تبدیل الپالس و محاسبه
𝑅 𝑡 = 𝑃1 𝑡 + 𝑃2 𝑡 =𝑆1𝑒
−𝑆2𝑡 − 𝑆2𝑒−𝑆1𝑡
𝑆1 − 𝑆2 ,
𝑆1 =1
2(3𝜆 + 𝜇 + 𝜆2 + 6𝜆𝜇 + 𝜇2)
𝑆1 =1
2(3𝜆 + 𝜇 − 𝜆2 + 6𝜆𝜇 + 𝜇2)
:داشتیم عمیرناپذیرت عضوهای با دوعضوی سیستم در که حالی در 𝑅 𝑡 = 𝑒−𝜆𝑡 + 𝑒−𝜆𝑡 − 2𝑒−2𝜆𝑡 = 2𝑒−𝜆𝑡 − 𝑒−2𝜆𝑡
در دارد بستگی دیگر عضو از پس عضو یک افتادن کار از به صرفا سیستم افتادن کار از تعمیرناپذیر، سیستم در که است آن تفاوت علت 24 .بیفتد کار از دیگر عضو تعمیر از قبل عضو یک که است زمانی سیستم افتادن کار از پذیر، تعمیر سیستم در که حالی

5/25/2011
13
افتادگی کار از وقوع تا میانگین زمان مدت
𝑀𝑇𝑇𝐹 = 𝑅 𝑡 𝑑𝑡∞
0= مدت زمان متوسطی که سیستم در حال کار است
𝑀𝑇𝑇𝐹 : سیستم با دو عضو موازی تعمیرناپذیر = 2
λ−
1
2λ=
3
2λ
𝑀𝑇𝑇𝐹 : سیستم با دو عضو موازی تعمیرپذیر = 𝑆1
𝑆1−𝑆2∙1
𝑆2−
𝑆2
𝑆1−𝑆2∙1
𝑆1=
3𝜆+𝜇
2𝜆2
.برای سیستم های تعمیرپذیر، زمان کار سیستم افزایش پیدا می کندبنابراین
بخواهیم اگر تر پیچیده های سیستم در R(t) صحیح عملکرد با متناظر های حالت روی از) کرده محاسبه را دلیل به) است غیرممکن تقریبا و مشکل بسیار کنیم پیدا را MTTF مقدار آن، از گیری انتگرال با بعد و (سیستم (ها حالت احتمال زمانی عبارت تعیین دشواری
تعیین فقط هدف که که زمانی اما MTTF ماندگار حالت مفهوم بر مبتنی تر ساده های روش از توان می باشد .(تصادفی حالت تغییر احتمال ماتریس) کرد استفاده
.بود خواهد ماندگار حالت به سیستم ورود از قبل میانگین مدت MTTF صورت این در
25
روش استفاده از ماتریسP
(موازی)به عنوان مثال برای سیستم دوعضوی تعمیرپذیر
𝑃 =1 − 2𝜆 2𝜆 0𝜇 1 − 𝜆 + 𝜇 𝜆0 2𝜇 1 − 2𝜇
حالت 3 ماندگار است
𝑄 =1 − 2𝜆 2𝜆𝜇 1 − 𝜆 + 𝜇
𝑀 = [𝐼 − 𝑄]−1=2𝜆 −2𝜆−𝜇 𝜆 + 𝜇
−1
=
𝜆 + 𝜇
2𝜆22𝜆
2𝜆2
𝜇
2𝜆22𝜆
2𝜆2
Mij : مدت میانگین که سیستم قبل از ورود به حالت ماندگار، در حالتj استقرار خواهد داشت مشروط بر آنکه فرآیند سیستم از .شروع شده باشد iحالت
:باشد در اینصورت 1اگر شروع فرآیند سیستم از حالت
𝑀𝑇𝑇𝐹 = 𝑚11 +𝑚12 =3𝜆 + 𝜇
2𝜆2
:باشد در اینصورت( عملکرد یکی از عضوها) 2اگر شروع فرآیند سیستم از حالت
𝑀𝑇𝑇𝐹 = 𝑚21 +𝑚22 =𝜇 + 2𝜆
2𝜆2
:اگر سیستم دو عضوی تعمیرپذیر، سری باشد
𝑃 =1 − 2𝜆 2𝜆 0𝜇 1 − 𝜆 + 𝜇 𝜆0 2𝜇 1 − 2𝜇
حالتهای 3 و2 ماندگار هستند
𝑄 = 1 − 2𝜆 ⟹ 𝐼 − 𝑄 −1 =1
2𝜆
26

5/25/2011
14
آهنگ از کار افتادن مؤثر سیستم: :قبال برای سیستم یک عضوی داشتیم
𝑀𝑇𝑇𝐹 =1
𝜆 ⟹ 𝜆 =
1
𝑀𝑇𝑇𝐹
:طور مشابه می توانیم برای سیستم دو عضوی تعمیرپذیر سری بنویسیمبه
𝜆𝑒𝑞 =1
𝑀𝑇𝑇𝐹= 2𝜆
:برای سیستم دو عضوی تعمیرپذیر موازیو
𝜆𝑒𝑞 =1
𝑀𝑇𝑇𝐹=
2𝜆2
3𝜆 + 𝜇
تعریف شد اما به معنای امکان استفاده از تابع توزیع نمایی برای خرابی کل سیستم نیست λeqگرچه برای سیستم : توجه .است و مقدار میانگینی برای توزیع غیرنمایی محسوب می شود MTTFبلکه فقط برای محاسبه
27
پیچیده های سیستم تحلیل: است استفاده قابل نیز پیچیده های سیستم تحلیل برای قبل، ساده های سیستم تحلیل برای حاکم منطق.
کار مراحل:
سیستم برای ممکن های حالت همه شناسایی
ها حالت تغییر (نرخ یا) احتمال و دیگر حالت به حالت یک از سیستم حالت تغییر های راه همه تعیین
تصادفی حالت تغییر احتماالت ماتریس یا و دیفرانسیل معادله تشکیل
رابطه از استفاده با ها حالت حدی احتمال تعیین αP=α
ظرفیت نیمه حالت یا و افتادن کار از یا و صحیح عملکرد به منجر های حالت تعیین
افتادگی کار از عملکرد، های حالت احتمال تعیین برای (5 و 4 های قسمت از شده محاسبه) ها حالت احتمال ترکیب ظرفیت نیمه یا و
رابطه از استفاده [I-Q]-1 محاسبه برای MTTF
28

5/25/2011
15
غیرمشابه عضوهای با موازی-سری تعمیرپذیر عضوی سه سیستم :2مثال
در را ماتریس اجزای اگر Δt ضرب با توانیم می کنیم ضرب P از پس را حالت هر در سیستم داشتن قرار احتمال ها، حالت احتمال بردار در n مرحله .کنیم تعیین
ها حالت حدی احتمال بردار اگر α=[p1 p2 …. P8] رابطه از باشیم داشته را αP=α، شوند می تعیین حدی احتماالت.
29
2
3
1
1 U
2 U
3 D
1 U
2 D
3 U
1 D
2 U
3 U
1 D
2 D
3 U
1 U
2 D
3 D
1 D
2 U
3 D
1 D
2 D
3 D
1 U
2 U
3 Uµ1
λ3
µ2
λ2
λ1
µ3
µ2
λ2λ3
µ3µ3
λ3
µ2
λ2
λ1
µ1µ3
λ3
µ1
λ1
غیرمشابه عضوهای با موازی-سری تعمیرپذیر عضوی سه سیستم :مثال
Pup=P1: 3و 2همراه با 1عملکرد صحیح = های عملکرد صحیح سیستمحالت
Pdown=P2+P5+P6+P7+P8 : 8و 7و 6و 5و 2حالت های = های از کار افتادگیحالت
Pderated=P3+P4 : 3یا 2همراه با 1عملکرد صحیح = حالت های عملکرد نیمه ظرفیت
برای محاسبهMTTF : با حذف سطر و ستون مربوط به آنها از ماتریس . حالت های ماندگار هستند 8و 7و 6و 5و 2حالت هایP:
𝑄 =
1 − 𝜆1 − 𝜆2 − 𝜆3 𝜆2 𝜆3𝜇2 1 − 𝜇2 − 𝜆1 − 𝜆3 0𝜇3 0 1 − 𝜇3 − 𝜆1 − 𝜆3
⟹𝑀 = [𝐼 − 𝑄]−1=
𝑚11 𝑚12 𝑚13
𝑚21 𝑚22 𝑚23
𝑚31 𝑚32 𝑚33
⟹ 𝑀𝑇𝑇𝐹 = 𝑚11 +𝑚12 +𝑚13
بخواهیم اگر R(t) ماتریس روی از را دیفرانسیل معادله باید کنیم محاسبه را P آوریم دست به:
𝑃1′ 𝑃3
′ 𝑃4′ = 𝑃1 𝑃3 𝑃4 ∙ 𝑄 − 𝐼 ⟹ ⋯
30
2
3
1
1 U
2 U
3 D
1 U
2 D
3 U
1 D
2 U
3 U
1 D
2 D
3 U
1 U
2 D
3 D
1 D
2 U
3 D
1 D
2 D
3 D
1 U
2 U
3 Uµ1
λ3
µ2
λ2
λ1
µ3
µ2
λ2λ3
µ3µ3
λ3
µ2
λ2
λ1
µ1µ3
λ3
µ1
λ1

5/25/2011
16
فراوانی و تداوم تعیین های روش (Frequency and Duration Techniques) همچنین و پذیری دسترس و سیستم های حالت از هریک برقراری احتمال توان می قبل، بخش های روش از استفاده با
MTTF کرد تعیین را. MTTF کار حال در سیستمهای اطمینان قابلیت بیان برای نیز دیگری شاخصهای اما .است سیستم کارکرد متوسط زمان مدت
.است حالتها تداوم میانگین و حالتها برقراری (فرکانس) فراوانی شامل شاخصها این .دارند وجود تعمیر و
تعمیر و خرابی نرخ با تعمیرپذیر عضوی یک سیستم :3مثال λ و μ
𝐴 = 𝑃0 =𝜇
𝜆+𝜇=
𝑚
𝑚+𝑟
𝑈 = 𝑃1 =𝜆
𝜆+𝜇=
𝑟
𝑚+𝑟
𝑀𝑇𝑇𝐹 = 𝑚 =1
𝜆 𝑢𝑝 میانگین مدت زمان کارکرد یا حالت
𝑀𝑇𝑇𝑅 = 𝑟 =1
𝜇 𝑑𝑜𝑤𝑛 میانگین مدت زمان تعمیر یا حالت
𝑇 = زمان یک چرخه برای تکرار حالت موردنظر سیستم = 𝑚 + 𝑟 = 𝑀𝑇𝐵𝐹 = 1
𝑓
f: سیستم حالت تغییر نرخ یا سیستم حالت تغییر چرخه فراوانی یا فرکانس عددی مقادیر است کم بسیار فعال حالت زمان با مقایسه در عمال تعمیر زمان مدت چون MTTF و MTBF دو اما هستند هم به نزدیک
.هستند متفاوت مفهومفراوانی پیچیده، های سیستم در اما .است برابر هم با افتادگی کار از حالت و فعال های حالت وقوع فراوانی ،(حالته دو) عضوی یک سیستم در
.است متفاوت ها حالت وقوع
31
1
( )
2
( )
λ
µ
T
M
(MTTF)r
(MTTR)
:باشیم داشته 2μ و 2λ تعمیر و خرابی نرخ با دیگری سیستم اگر حال
𝐴 = 𝑃0 =2𝜇
2𝜆+2𝜇=
𝜇
𝜆+𝜇
𝑈 = 𝑃1 =2𝜆
2𝜆+2𝜇=
𝜆
𝜆+𝜇
اول سیستم برابر دو دوم، سیستم افتادن کار از دفعات تعداد اما است برابر سیستم دو این ناپذیری دسترس و پذیری دسترس گرچه شود می انجام اول سیستم تعمیرات برابر دو سرعت با نیز دوم سیستم تعمیرات عوض، در و است
𝑠 احتمال برقراری حالت 𝑃 𝑠 =𝑠 میانگین تداوم حالت
𝑠 میانگین فاصله زمانی برای برقراری حالت=
𝑚(𝑠)
𝑇(𝑠)
:برای سیستم دوحالته
𝑃0 =𝑚
𝑚 + 𝑟=𝑚
𝑇=
1
𝜆𝑇=𝑓
𝜆 ⟹ 𝑓 = 𝑃0𝜆
𝑃1 =𝑟
𝑚 + 𝑟=𝑟
𝑇=
1
𝜇𝑇=𝑓
𝜇 ⟹ 𝑓 = 𝑃1𝜇
:بنابراین می توان گفت
فرکانس وقوع یک حالت( = احتمال برقرار بودن آن حالت) × ( آهنگ ترک آن حالت)
= ( احتمال برقرار نبودن آن حالت) × ( آهنگ ورود به آن حالت)
𝑓 𝑠 = 𝑃 𝑠 ∙ 𝜆𝑑 𝑠 = 𝑃 𝑠 ∙ 𝜆𝑒 𝑠
.است حالت تغییر انتظار مورد تعداد ،f واقع در
32
0
( )
1
( )
2λ
2µ

5/25/2011
17
شرایط مورد در اما است صادق سیستم بلندمدت رفتار مورد در فقط تداوم، و فرکانس مفهوم که شود توجه باید .نیست استفاده قابل گذرا
𝑃 𝑠 =𝑚 𝑠
𝑇 𝑠=
𝑚 𝑠1
𝑓(𝑠)
⟹ 𝑚 𝑠 =𝑃 𝑠
𝑓 𝑠=
1
𝜆𝑑 𝑠=
1
s نرخ خروج از حالت
حالت آن از خروج آهنگ معکوس با است برابر حالت یک تداوم میانگین بنابراین
تعمیرپذیر عضوی دو سیستم :4مثال
33
U1
D2
D1
D2
λ1
µ1
D1
U2
λ2 µ2 λ2µ2
U1
U2µ1
λ1
1 2
43
حالت با مرتبط های حالت تعیین در باید کنیم محاسبه را وقوع فرکانس ورود، نرخ روی از خواستیم می اگر :f1 تعیین برای مثال عنوان به .کنیم دقت نظر مورد
ها حالت از هریک تداوم میانگین:
:ها حالت از یک هر چرخه زمان مدت
:یادآوری MTTF: بستگی که است کارافتادگی از متوالی حالت دو وقوع بین زمان مدت میانگین با برابر
.دارد یکدیگر با سیستم اجزای رابطه بهMTBF: است سیستم افتادگی کار از و صحیح عملکرد از چرخه یک تکرار زمان میانگین برابر. باشد موازی سیستم اگر: T4=MTBF (است حالت یک فقط که) خرابی حالت تکرار یعنی 4 حالت تکرار چرخه زمان چون
باشد سری سیستم اگر: T1=MTBF (است سیستم اجزای برای وضعیت یک با متناظر که) سالم حالت تکرار یعنی 1 حالت تکرار چون
34

5/25/2011
18
ترکیبی های حالت وقوع فرکانس:
به) گرفت نظر در ترکیب یک در مجموعا را آنها توان می باشند داشته آن رفتار بر مشابهی تأثیر سیستم، های حالت از برخی اگر (کرد تعیین را سیستم افتادگی کار از های حالت مجموعه یا سیستم فعال های حالت مجموعه مثال، عنوان
(هستند ناسازگار ها حالت چون) ها حالت آن احتماالت مجموع =مشابه حالتهای از مجموعه یک برقراری احتمال
چون) مجموعه آن حالتهای میان حالت تغییر وقوع فرکانس منهای حالتها آن وقوع فرکانسهای مجموع =مشابه حالتهای از مجموعه یک وقوع فرکانس (کند نمی ایجاد سیستم حالت در تغییری مشابه، حالتهای آن بین تغییر
بگیریم مجموعه یک را 4 و 3 های حالت اگر قبل، تعمیرپذیر عضوی دو سیستم در مثال عنوان به:
f34=f3+f4-(4 و 3 بین حالت های f )= f3+f4-(P3λ1+P4μ1)
= P3(λ1+μ2)+P4(μ1+μ2)-P3λ1-P4μ1
=P3μ2+P4μ2 = (P3+P4)μ2 =𝜇2𝜆2
𝜇2+𝜆2
حالت سایر به حالت آن از خروج نرخ در آن حالت هر وقوع احتمال حاصلضرب مجموع با را f34 ابتدا، همان از توانستیم می واقع در .کنیم تعیین نیز (مجموعه همان در موجود حالت جز به) ها
2 و 1 های حالت برای مشابه طور به
f12=f1+f2-(2 و 1 بین حالت های f )
= f1+f2-(P1λ1+P2μ1) = (P1+P2)λ2 = 𝜇2𝜆2
𝜇2+𝜆2 = f34
.استآن است که حالت های سیستم به دو مجموعه تقسیم شده f12و f34علت برابر بودن
دارد را موازی سیستم مفهوم نه و سری سیستم مفهوم نه ،4 و 3 یا 2 و 1 های حالت مجموعه :توجه
35
2 1 4 3
λ2
µ2
تعمیرپذیر عضوی دو سیستم :افتادگی کار از و فعال های حالت وقوع فرکانس محاسبه
سری سیستم
𝑓فعال = 𝑓1 =𝜇1𝜇2 𝜆1+𝜆2
𝜆1+𝜇1 𝜆2+𝜇2
𝑓غیرفعال = 𝑓2 + 𝑓3 + 𝑓4 − 4,3 4,2 و 3,2 و فرکانس تبدیل میان حالت های
= 𝑃2 𝜇1 + 𝜆2 + 𝑃3 𝜆1 + 𝜇2 + 𝑃4 𝜇1 + 𝜇2
−𝑃3𝜆1 − 𝑃4𝜇1 − 𝑃2𝜆2 − 𝑃4𝜇2
= 𝑃2𝜇1 + 𝑃3𝜇2
ها حالت مجموعه از خارج به آنها از خروج نرخ و مجموعه در موجود های حالت احتمال حاصلضرب مجموع
موازی سیستم
𝑓غیرفعال = 𝑓4 =𝜆1𝜆2 𝜇1+𝜇2
𝜆1+𝜇1 𝜆2+𝜇2
𝑓فعال = 𝑓1 + 𝑓2 + 𝑓3 − فرکانس تبدیل میان حالت های 3 و 2 و1
= 𝑃2𝜆2 + 𝑃3𝜆1 36

5/25/2011
19
ها حالت مجموعه وقوع فرکانس محاسبه برای بازگشتی رابطه
با ها حالت از منتخب های مجموعه وقوع فرکانس و احتمال باشد، شده محاسبه سیستم های حالت حدی احتمال اگر :است تعیین قابل زیر بازگشتی رابطه از استفاده
𝑓𝑖′ = 𝑓𝑖+1
′ + 𝑃𝑖(𝜆+𝑖 − 𝜆−𝑖)
ها حالت مجموعه تداوم میانگین
𝑚𝑖′ =
𝑃𝑖′
𝑓𝑖′
𝑚𝑖 میانگین تداوم مجموعه حالت ها′
𝑃𝑖 مجموع احتمال حالت های آن مجموعه ′
𝑓𝑖 مجموعهفرکانس وقوع حالت های آن ′
37
نصب و تعمیر برای ای مرحله دو فرآیند (Two Stage Repair and Installation Process)
نرخ باید تعمیر، نرخ و خرابی نرخ بر عالوه لذا و است نصب و تعمیر خرابی، کار، شامل سیستم فرآیند واقعی، های سیستم در .نصب دوره و تعمیر دوره :است دوره دو شامل افتادگی کار از دیگر، عبارت به .شود گرفته نظر در نیز نصب
یدکی تفاوت :توجه (Spare) کار به آماده و (Stand-by) عضو که است آن stand-by عضو ولی شود، می مدار وارد سریعا .دارد نصب به نیاز یدکی
یدکی بدون عضوی یک سیستم برای :5 مثال
λ: (فعال حالت از خروج نرخ) افتادگی کار از نرخ μ : (معیوب حالت از خروج نرخ) تعمیر نرخ
ɣ : (فعال مرحله به ورود نرخ) نصب نرخ
𝑃 =1 − λ λ 00 1 − 𝜇 𝜇𝛾 0 1 − 𝛾
38
γ
λ
μ
1
2 3

5/25/2011
20
:و محاسبه احتمال حدی حالت ها به دست می آوریم Pبا تشکیل ماتریس
𝐴 = 𝑃1 =𝜇𝛾
λ𝜇 + λγ + μγ
𝑃2 =λ𝛾
λ𝜇 + λγ + μγ𝑃3 و =
λ𝜇
λ𝜇 + λγ + μγ ⟹ U = 𝑃2 + 𝑃3 =
λ(𝜇 + 𝛾)
λ𝜇 + λγ + μγ
𝑓1 = 𝑃1λ =λ𝜇𝛾
λ𝜇 + λγ + μγ , 𝑓2 = 𝑃2𝜇 =
λ𝜇𝛾
λ𝜇 + λγ + μγ= 𝑓1 , 𝑓3 = 𝑃3γ =
λ𝜇𝛾
λ𝜇 + λγ + μγ= 𝑓1
𝑓فعال = 𝑓1 =λ𝜇𝛾
λ𝜇 + λγ + μγ
𝑓غیرفعال = 𝑓2 + 𝑓3 − 𝑃2𝜇 =λ𝜇𝛾
λ𝜇 + λγ + μγ= 𝑓فعال
𝑚1 =𝑃1𝑓1=1
λ , 𝑚2 =
𝑃2𝑓2
=1
μ , 𝑚3 =
𝑃3𝑓3=1
γ
⟹
mفعال =𝑃فعال
𝑓فعال= 𝐴 𝑜𝑟 𝑃1
𝑓فعال=1
λ
mغیرفعال =𝑃غیرفعال
𝑓غیرفعال= 𝑈 𝑜𝑟 𝑃2 + 𝑃3
𝑓فعال=μ + γ
μγ=1
μ+1
γ= 𝑚2 +𝑚3
39
γ
λ
μ
دسترس در یدکی یک با عضوی یک سیستم :6مثال
و باشد نشده مصرف قبال یدکی آنکه شرط به (نصب نرخ با) کرد جایگزین یدکی، توسط را آن توان می افتد، می کار از عضوی وقتی حالت این در :باشد مصرف آماده یدکی شکل به و شده تعمیر افتاده، کار از قبال عضو یا
شود می وآماده دهد می وضعیت تغییر یکی فقط اما دارد وجود همزمان صورت به تعمیرات :توجه. :است محاسبه قابل ها حالت حدی احتمال αP=α رابطه و P ماتریس از استفاده با
𝑃1 =2γ2𝜇2 + 2𝛾𝜇2 λ + μ
λ2𝜇2 + 2𝜇 γ + μ λ + γ λ + μ
𝑃2 =2λ𝜇 λ + μ
λ2𝜇2 + 2𝜇 γ + μ λ + γ λ + μ
𝑃3 =2λ𝜇γ λ + μ
λ2𝜇2 + 2𝜇 γ + μ λ + γ λ + μ
𝑃4 =2λγ2μ
λ2𝜇2 + 2𝜇 γ + μ λ + γ λ + μ
𝑃5 =λ2γ2
λ2𝜇2 + 2𝜇 γ + μ λ + γ λ + μ
A = 𝑃1 + 𝑃4 , U = 𝑃2 + 𝑃3 + 𝑃5
40
γ
λ
2μ
λ
γ
μ
1
2
4
5 3
μ

5/25/2011
21
𝑓1 = 𝑃1λ =λ𝜇𝛾
λ𝜇 + λγ + μγ ,
𝑓2 = 𝑃2𝜇 =λ𝜇𝛾
λ𝜇 + λγ + μγ= 𝑓1 ,
𝑓3 = 𝑃3γ =λ𝜇𝛾
λ𝜇 + λγ + μγ= 𝑓1
𝑓فعال = 𝑓1 + 𝑓1 − 𝑃4𝜇 = 𝑃1λ + 𝑃4λ = 2λ𝜇𝛾 λ + μ γ + μ
λ2𝜇2 + 2𝜇 γ + μ λ + γ λ + μ
𝑓غیرفعال = 𝑓2 + 𝑓3 + 𝑓5 − 𝑃2𝜇 − 𝑃5 2𝜇 = 𝑃2𝛾 + 𝑃3𝛾 + 𝑃5 × 0
=2λ𝜇𝛾 λ+μ γ+μ
λ2𝜇2+2𝜇 γ+μ λ+γ λ+μ= 𝑓فعال
⟹
mفعال =𝑃فعال
𝑓فعال=
𝐴
𝑓فعال=1
λ
mغیرفعال =𝑃غیرفعال
𝑓غیرفعال=
𝑈
𝑓فعال=1
γ+
2λ𝛾
2𝜇 λ + μ γ + μ
41
است پذیر امکان مشابه طور به نیز ها سیستم سایر بررسی: دسترس در یدکی دو با عضوی یک سیستم :7مثال
42
λ
3μ
γ
1
2μ μ
λ λ
2μ μ
γ γ
46
7 5 2 3

5/25/2011
22
دسترس در یدکی یک با عضوی دو سیستم :8مثال
بنابراین:
به نمودار گسترش موجب فعال عضوهای تعداد افزایش و چپ سمت به نمودار گسترش موجب ها یدکی تعداد افزایش .شود می پایین سمت
محدودیت) نصب تحت عضوهای تعداد یا (تعمیرکار محدودیت) تعمیر تحت عضوهای تعداد در محدودیت وجود صورت در .کنیم مشخص محدودیت، به توجه با را نصب یا تعمیر نرخ باید (نصاب
حالت A حالت و فعال حالت همواره C حالت ولی .است افتادگی کار از حالت همواره B بودن موازی یا سری به بستگی .دارد عضوها
حالت :سری سیستم B= افتاده کار از حالت
حالت :موازی سیستم B= فعال حالت
حالت :موازی نه و سری نه سیستم B= ظرفیت نیمه حالت
43
λ
3μ
γ
3
2μ μ
λ λ
2μ μ
γ γ
5
6 7 8 9
λ γ
λ
μ
γ
14
2
یدکی عضوهای حدی تعداد: تعداد اگر .شود می سیستم پذیری دسترس افزایش به منجر یدکی عضوهای تعداد افزایش
.کرد خواهد میل خود حدی مقدار سمت به پذیری دسترس کند، میل بینهایت به یدکی عضوهای
بینهایت یدکی عضوهای تعداد حالت در: (دارد وجود نصب آماده عضو یک همیشه چون) شود می تأثیر بی تعمیر فرآیند مدت عملکرد در تغییر دو فقط) شود می غیرفعال و فعال حالت دو شامل فقط حالت فضای نمودار
(داریم سیستم
𝐴 =𝛾
𝜆𝑒+𝛾 , 𝑈 =
𝜆𝑒
𝜆𝑒+𝛾
ɣ :نرخ نصب
λe :نرخ خرابی سیستم که به نوع سیستم بستگی دارد . است، λ ،λe=λسیستم تک عضوی با نرخ خرابی در
است، λ ،λe=2λدر سیستم دو عضوی سری با عضوهای مشابه و هرکدام با نرخ خرابی
λ ،λeدر سیستم دو عضوی موازی با عضوهای مشابه و هرکدام با نرخ خرابی =2λ2
3λ+γ ،است
44