Embed Size (px)
Citation preview
Giáo trình Trang bị điện Lê Văn Mai
Bài 1: Điều chỉnh tốc độ động cơ điện1. Khái niệm chung.
1.1. Khái niệm về điều chỉnh tốc độ:
Ngày nay, đại đa số các máy sản xuất từ nhỏ đến lớn, từ đơn lẻ đến cả một dây chuyền sản xuất đều sử dụng truyền động điện (TĐĐ). Để đảm bảo những yêu cầu của các công nghệ phức tạp khác nhau, nâng cao mức độ tự động cũng như năng suất, các hệ TĐĐ thường phải điều chỉnh tốc độ, tức là cần phải điều chỉnh được tốc độ máy theo yêu cầu công nghệ. Có thể điều chỉnh tốc độ máy bằng phương pháp cơ khí hoặc bằng phương pháp điện qua việc điều chỉnh tốc độ động cơ điện. Ở đây, ta chỉ xem xét việc điều chỉnh tốc độ theo phương pháp điện.Điều chỉnh tốc độ một động cơ điện khác với việc tự thay đổi tốc độ của động cơ đó.
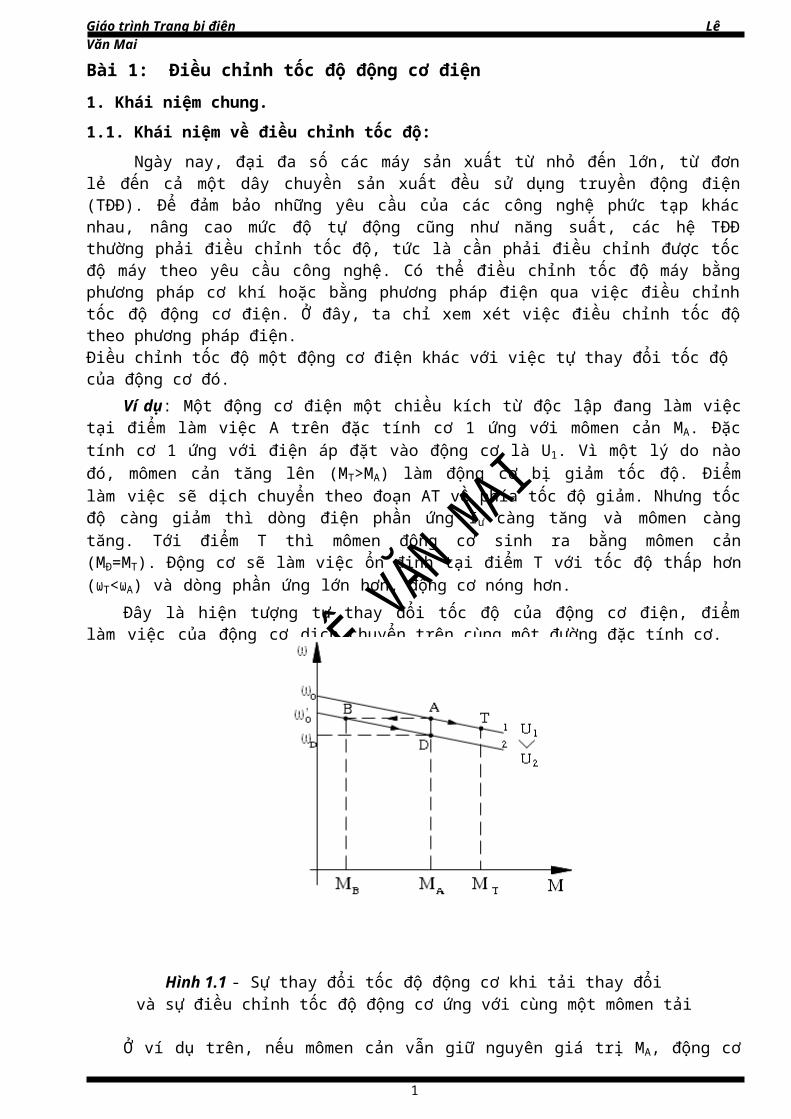
Ví dụ: Một động cơ điện một chiều kích từ độc lập đang làm việc tại điểm làm việc A trên đặc tính cơ 1 ứng với mômen cản MA. Đặc tính cơ 1 ứng với điện áp đặt vào động cơ là U1. Vì một lý do nào đó, mômen cản tăng lên (MT>MA) làm động cơ bị giảm tốc độ. Điểm làm việc sẽ dịch chuyển theo đoạn AT về phía tốc độ giảm. Nhưng tốc độ càng giảm thì dòng điện phần ứng Iư càng tăng và mômen càng tăng. Tới điểm T thì mômen động cơ sinh ra bằng mômen cản (MĐ=MT). Động cơ sẽ làm việc ổn định tại điểm T với tốc độ thấp hơn (ωT<ωA) và dòng phần ứng lớn hơn, động cơ nóng hơn.
Đây là hiện tượng tự thay đổi tốc độ của động cơ điện, điểm làm việc của động cơ dịch chuyển trên cùng một đường đặc tính cơ.
Hình 1.1 - Sự thay đổi tốc độ động cơ khi tải thay đổivà sự điều chỉnh tốc độ động cơ ứng với cùng một mômen tải
Ở ví dụ trên, nếu mômen cản vẫn giữ nguyên giá trị MA, động cơ đang làm việc ổn định tại điểm A trên đặc tính cơ 1, ta giảm điện áp phần ứng từ U1 xuống U2 (đặc tính cơ tương ứng là 2). Do quán tính cơ, động cơ chuyển điểm làm việc từ điểm A trên đường 1 sang điểm B trên đường 2 với cùng một tốc độ ωA. Mômen của động cơ tại điểm B nhỏ hơn mômen cản A (MB<MA) nên động cơ bị giảm tốc độ. Điểm làm việc trượt xuống theo đường đặc tính cơ 2. Tốc độ động cơ càng giảm thì dòng điện phần ứng càng tăng. Tới điểm D thì mômen động cơ cân bằng với mômen cản MA
(MB=MA). Động cơ sẽ làm việc ổn định tại điểm D với tốc độ thấp hơn (ωD<ωA).Đây không phải là hiện tượng tự thay đổi tốc độ do mômen cản tăng lên mà là sự điều chỉnh
tốc độ động cơ (điều chỉnh giảm) trong khi mômen cản vẫn giữ nguyên. Điểm làm việc chuyển từ đặc tính cơ này sang đặc tính cơ khác do thay đổi thông số của mạch điện động cơ.
Có rất nhiều phương pháp điều chỉnh tốc độ động cơ. Tuỳ theo máy sản xuất, ta chọn một phương pháp điều chỉnh tốc độ cho phù hợp, đảm bảo quá trình sản xuất được thuận lợi, nâng cao chất lượng và năng suất.
1.2. Các chỉ tiêu điều chỉnh tốc độ
1
Giáo trình Trang bị điện Lê Văn Mai
Chất lượng của một phương pháp điều chỉnh tốc độ được đánh giá qua một số các chỉ tiêu sau đây.
1.2.1 Dải điều chỉnh tốc độDải điều chỉnh tốc độ (hay phạm vi điều chỉnh tốc độ) là tỉ số giữa các giá trị tốc độ làm việc
lớn nhất và nhỏ nhất của hệ TĐĐ ứng với một mômen tải đã cho:
Dải điều chỉnh tốc độ của một hệ TĐĐ càng lớn càng tốt.Mỗi một máy sản xuất yêu cầu một dải điều chỉnh nhất định và mỗi một phương pháp điều
chỉnh tốc độ chỉ đạt được một dải điều chỉnh nào đó.
1.2.2 Độ trơn điều chỉnhĐộ trơn điều chỉnh tốc độ khi điều chỉnh được biểu thị bởi tỷ số giữa 2 giá trị tốc độ của 2 cấp
kế tiếp nhau trong dải điều chỉnh:
Trong đó: ωi - Tốc độ ổn định ở cấp i.
ωi+1 - Tốc độ ổn định ở cấp i+1.Trong một dải điều chỉnh tốc độ, số cấp tốc độ càng lớn thì sự chênh lệch tốc độ giữa 2 cấp kế
tiếp nhau càng ít do đó độ trơn càng tốt.Khi số cấp tốc độ rất lớn (k→∞) thì độ trơn điều chỉnh γ → 1. Trường hợp này hệ điều chỉnh
gọi là hệ điều chỉnh vô cấp và có thể có mọi giá trị tốc độ trong toàn bộ dải điều chỉnh.
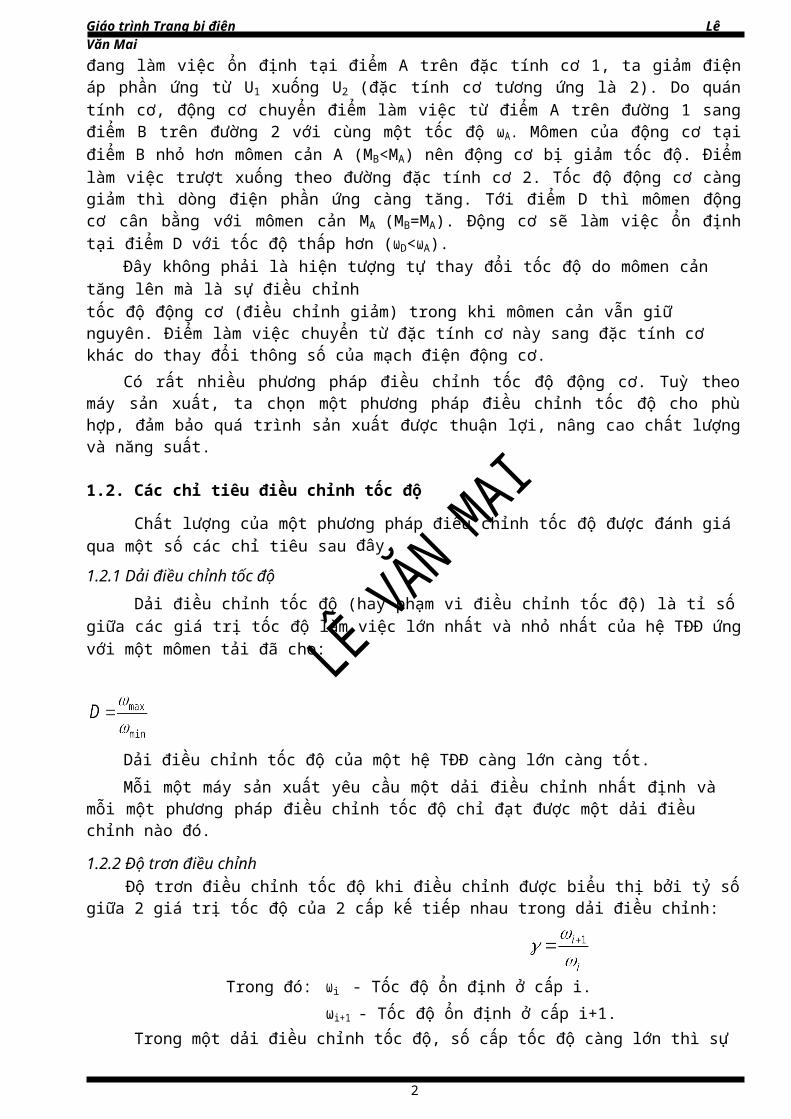
1.2.3 Độ ổn định tốc độ (độ cứng của đặc tính cơ)Để đánh giá và so sánh các đặc tính cơ, người ta đưa ra khái niệm độ cứng đặc tính cơ β và
được tính:
Hình 1.2 - Độ cứng của đặc tính cơ
Nếu |β| bé thì đặc tính cơ là mềm (|β| < 10).Nếu |β| lớn thì đặc tính cơ là cứng (|β| = 10 ÷ 100).Khi |β| = ∝ thì đặc tính cơ là nằm ngang và tuyệt đối cứng.
Đặc tính cơ có độ cứng β càng lớn thì tốc độ càng ít bị thay đổi khi mômen thay đổi. Ở trên hình 1.2, đường đặc tính cơ 1 cứng hơn đường đặc tính cơ 2 nên với cùng một biến động ∆M thì đặc tính cơ 1 có độ thay đổi tốc độ ∆ω1 nhỏ hơn độ thay đổi tốc độ ∆ω2 cho bởi đặc tính cơ 2.
Nói cách khác, đặc tính cơ càng cứng thì sự thay đổi tốc độ càng ít khi phụ tải thay đổi nhiều. Do đó sai lệch tốc độ càng nhỏ và hệ làm việc càng ổn định, phạm vi điều chỉnh tốc độ sẽ rộng hơn.
1.2.4 Tính kinh tếHệ điều chỉnh có tính kinh tế khi vốn đầu tư nhỏ, tổn hao năng lượng ít, phí tổn vận hành
không nhiều.
2
Giáo trình Trang bị điện Lê Văn Mai
Các phương pháp điều chỉnh tốc độ qua mạch phần ứng luôn có tổn hao năng lượng lớn hơn điều chỉnh tốc độ qua mạch kích từ.
1.2.5 Sự phù hợp giữa đặc tính điều chỉnh và đặc tính tảiKhi chọn hệ điều chỉnh tốc độ với phương pháp điều chỉnh nào đó cho một máy sản xuất cần
lưu ý sao cho các đặc tính điều chỉnh bám sát yêu cầu đặc tính của tải máy sản xuất. Như vậy hệ làm việc sẽ đảm bảo được các yêu cầu chất lượng, độ ổn định...
Ngoài các chỉ tiêu trên, tuỳ trường hợp cụ thể mà ta có thể có những đòi hỏi khác buộc hệ điều chỉnh tốc độ cần phải đáp ứng.
3
Giáo trình Trang bị điện Lê Văn Mai
2. Điều chỉnh tốc độ động cơ một chiều kích từ độc lập
2.1 Xây dựng đặc tính cơ tự nhiên của ĐC-DC KTĐLNhư chúng ta đã biết trong vật lý, khi đặt vào trong từ trường một dây dẫn và cho dòng điện chạy
qua dây dẫn thì từ trường sẽ tác dụng một từ lực vào dòng điện (chính là vào dây dẫn) và làm dây dẫn chuyển động. Chiều của từ lực xác định theo quy tắc bàn tay trái.
Động cơ điện nói chung và động cơ điện một chiều nói riêng hoạt động theo nguyên tắc này. 2.1.1 Phương trình đặc tính cơ
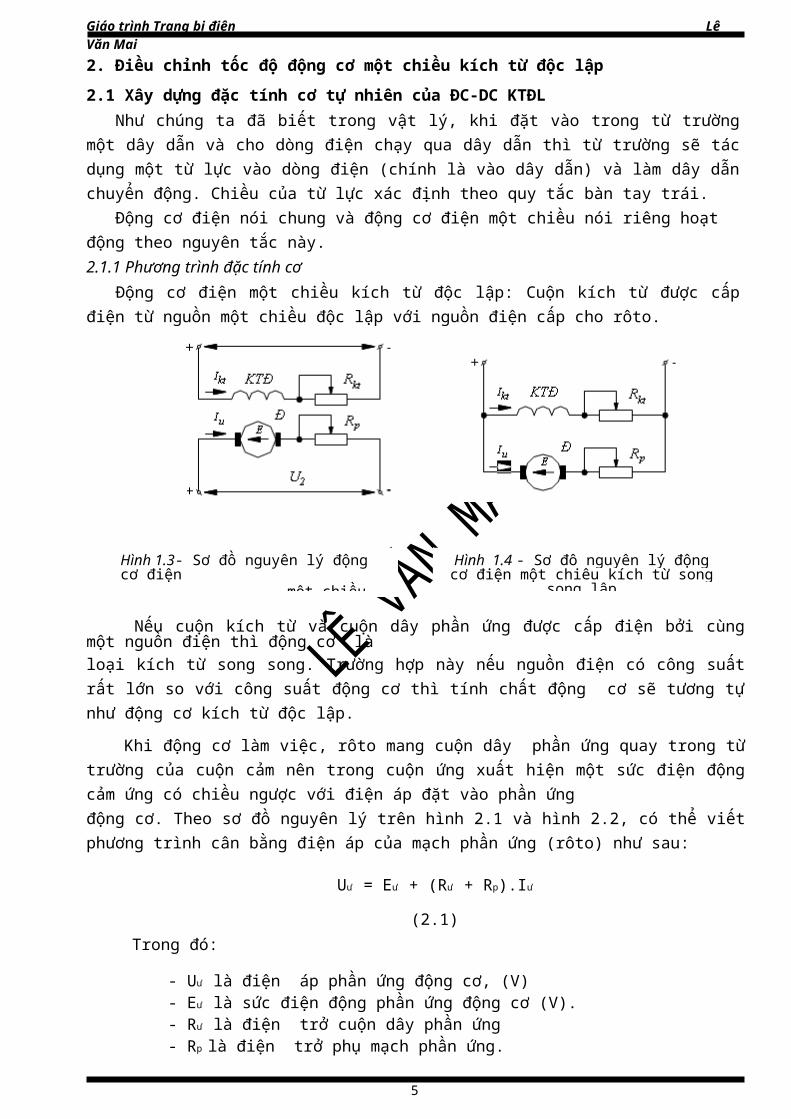
Động cơ điện một chiều kích từ độc lập: Cuộn kích từ được cấp điện từ nguồn một chiều độc lập với nguồn điện cấp cho rôto.
Nếu cuộn kích từ và cuộn dây phần ứng được cấp điện bởi cùng một nguồn điện thì động cơ làloại kích từ song song. Trường hợp này nếu nguồn điện có công suất rất lớn so với công suất động cơ thì tính chất động cơ sẽ tương tự như động cơ kích từ độc lập.
Khi động cơ làm việc, rôto mang cuộn dây phần ứng quay trong từ trường của cuộn cảm nên trong cuộn ứng xuất hiện một sức điện động cảm ứng có chiều ngược với điện áp đặt vào phần ứngđộng cơ. Theo sơ đồ nguyên lý trên hình 2.1 và hình 2.2, có thể viết phương trình cân bằng điện áp của mạch phần ứng (rôto) như sau:
Uư = Eư + (Rư + Rp).Iư (2.1)Trong đó:
- Uư là điện áp phần ứng động cơ, (V)- Eư là sức điện động phần ứng động cơ (V).- Rư là điện trở cuộn dây phần ứng- Rp là điện trở phụ mạch phần ứng.- Iư là dòng điện phần ứng động cơ.
Rư = rư + rct + rcb + rcp (2.2)rư - Điện trở cuộn dây phần ứng.rct - Điện trở tiếp xúc giữa chổi than và phiến góp. rcb -Điện trở cuộn bù.rcp - Điện trở cuộn phụ.
Sức điện động phần ứng tỷ lệ với tốc độ quay của rôto:
(2.3)
là hệ số kết cấu của động cơ.
4
Hình 1.3- Sơ đồ nguyên lý động cơ điện một chiều kích từ độc lập
Hình 1.4 - Sơ đồ nguyên lý động cơ điện một chiều kích từ song song lập
Giáo trình Trang bị điện Lê Văn Mai
ω - Từ thông qua mỗi cực từ.p - Số đôi cực từ chính.N - Số thanh dẫn tác dụng của cuộn ứng.a - Số mạch nhánh song song của cuộn ứng. Hoặc ta có thể viết:
Eư = KeФ.n (2.4) Và
Vậy: Ke = K/ 9,55 = 0,105K
Nhờ lực từ trường tác dụng vào dây dẫn phần ứng khi có dòng điện, rôto quay dưới tác dụng của mômen quay:
M = K.Ф.Iư (2.5)Từ hệ 2 phương trình (2.1) và (2.3) ta có thể rút ra được phương trình đặc tính cơ điện biểu thị
mối quan hệ ω = f(I) của động cơ điện một chiều kích từ độc lập như sau:
(2.6)
Từ phương trình (2.5) rút ra Iư thay vào phương trình (2.6) ta được phương trình đặc tính cơ biểu thị mối quan hệ ω = f(M) của động cơ điện một chiều kích từ độc lập như sau:
(2.7)
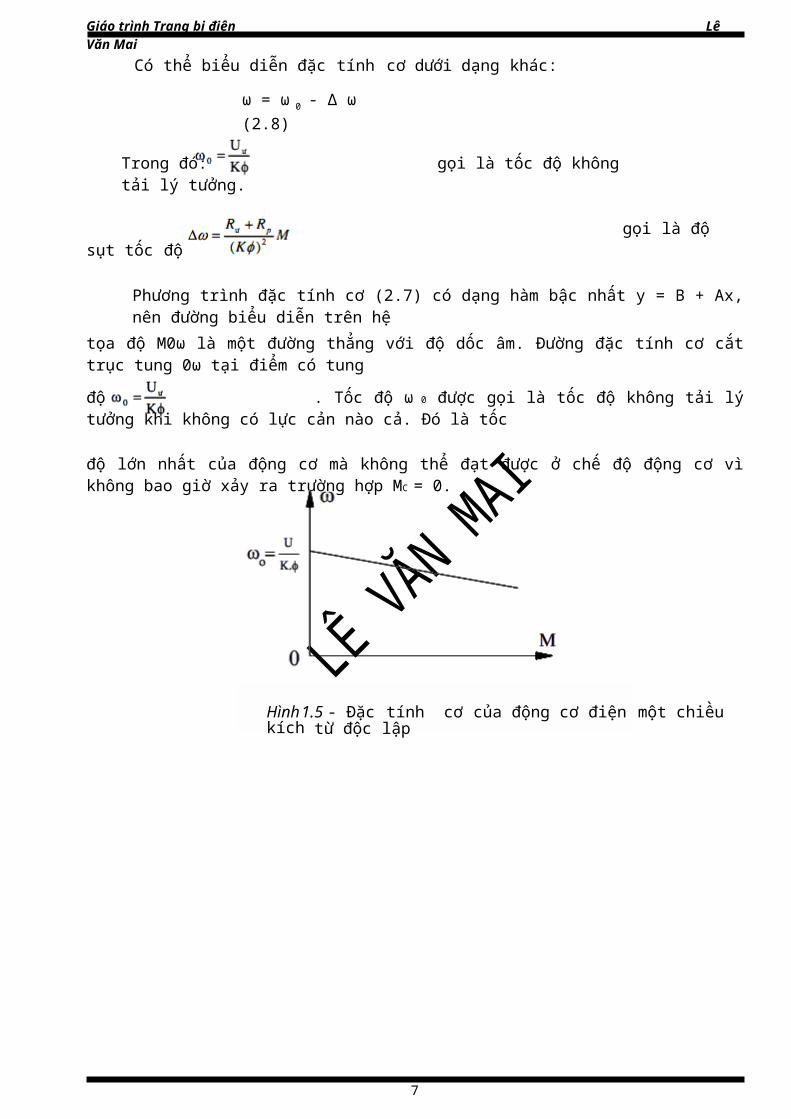
Có thể biểu diễn đặc tính cơ dưới dạng khác:
ω = ω 0 - ∆ ω (2.8)
Trong đó: gọi là tốc độ không tải lý tưởng.
gọi là độ sụt tốc độ
Phương trình đặc tính cơ (2.7) có dạng hàm bậc nhất y = B + Ax, nên đường biểu diễn trên hệtọa độ M0ω là một đường thẳng với độ dốc âm. Đường đặc tính cơ cắt trục tung 0ω tại điểm có tung
độ . Tốc độ ω 0 được gọi là tốc độ không tải lý tưởng khi không có lực cản nào cả. Đó là tốc
độ lớn nhất của động cơ mà không thể đạt được ở chế độ động cơ vì không bao giờ xảy ra trường hợp MC = 0.
Hình 1.5 - Đặc tính cơ của động cơ điện một chiều kích từ độc lập
5

Giáo trình Trang bị điện Lê Văn Mai
Khi phụ tải tăng dần từ MC = 0 đến MC = Mđm thì tốc độ động cơ giảm dần từ ω 0 đến ω đm.Điểm A(Mđm, ω đm) gọi là điểm định mức.
Rõ ràng đường đặc tính cơ có thể vẽ được từ 2 điểm ω0 và A. Điểm cắt của đặc tính cơ với trục hoành 0M có tung độ ω = 0 và có hoành độ suy từ phương trình (2.7): (2.9)
Hình1.6 - Đặc tính cơ tự nhiên của động cơ điện một chiều kích từ độc lập
Mômen Mnm và Inm gọi là mômen ngắn mạch và dòng điện ngắn mạch. Đó là giá trị mômen lớn nhất và dòng điện lớn nhất của động cơ khi được cấp điện đầy đủ mà tốc độ bằng 0. Trường hợp này xảy ra khi bắt đầu mở máy và khi động cơ đang chạy mà bị dừng lại vì bị kẹt hoặc tải lớn quá kéo không được. Dòng điện Inm này lớn và thường bằng: Inm = (10 ÷ 20)Iđm
Nó có thể gây cháy hỏng động cơ nếu hiện tượng tồn tại kéo dài.
2.1.2 Ảnh hưởng của các thông số điện đối với đặc tính cơPhương trình đặc tính cơ (2.7) cho thấy, đường đặc tính cơ bậc nhất ω = f(M) phụ thuộc vào các
hệ số của phương trình, trong đó có chứa các thông số điện U, Rp và Ф. Ta lần lượt xét ảnh hưởng của từng thông số này.
* Trường hợp thay đổi điện áp phần ứngVì điện áp phần ứng không thể vượt quá giá trị định mức nên ta chỉ có thể thay đổi về phía
giảm.U− biến đổi; Rp = const; Ф = const
Trong phương trình đặc tính cơ, ta thấy độ dốc (hay độ cứng) đặc tính cơ không thay đổi:
Tốc độ không tải lý tưởng ω0 thay đổi tỷ lệ thuận với điện áp:
Như vậy khi thay đổi điện áp phần ứng ta được một họ các đường đặc tính cơ song song với đường đặc tính cơ tự nhiên và thấp hơn đường đặc tính cơ tự nhiên.
6
Giáo trình Trang bị điện Lê Văn Mai
Hình 1.7 - Họ đặc tính cơ nhân tạo của động cơ điện một chiềukích từ độc lập khi giảm điện áp phần ứng
* Trường hợp thay đổi điện trở mạch phần ứngVì điện trở tổng của mạch phần ứng: RưΣ = Rư + Rưf nên điện trở mạch phần ứng chỉ có thể thay
đổi về phía tăng Rưf.Uư = const ; Rưf = var; Ф = const
Trường hợp này, tốc độ không tải giữ nguyên:
Còn độ dốc (hay độ cứng) của đặc tính cơ thay đổi tỷ lệ thuận theo RưΣ
Như vậy, khi tăng điện trở RưΣ trong mạch phần ứng, ta được một họ các đường đặc tính cơ nhân tạo cùng đi qua điểm (0, ω0).
Hình 1.8 - Họ đặc tính cơ nhân tạo của động cơ điện một chiều kích từ độc lập khi tăng điện trở phụ trong mạch phần ứng.
* Trường hợp thay đổi từ thông kích từUư = const ; Rưf = const; Ф = var
Để thay đổi từ thông Ф, ta phải thay đổi dòng điện kích từ nhờ biến trở Rkt mắc ở mạch kích từ của động cơ. Vì chỉ có thể tăng điện trở mạch kích từ nhờ Rkt nên từ thông kích từ chỉ có thể thay đổi về phía giảm so với từ thông định mức.
Trường hợp này, cả tốc độ không tải lý tưởng và độ dốc đặc tính cơ đều thay đổi.7

Giáo trình Trang bị điện Lê Văn Mai
Khi điều chỉnh giảm từ thông kích từ, tốc độ không tải lý tưởng ω0 tăng, còn độ cứng đặc tính cơ thì giảm mạnh. Họ đặc tính cơ nhân tạo thu được như hình 2.7.
Hình 1.9 - Họ đặc tính cơ nhân tạo của động cơ điện một chiều kích từ độc lập khi giảm từ thông kích từ.
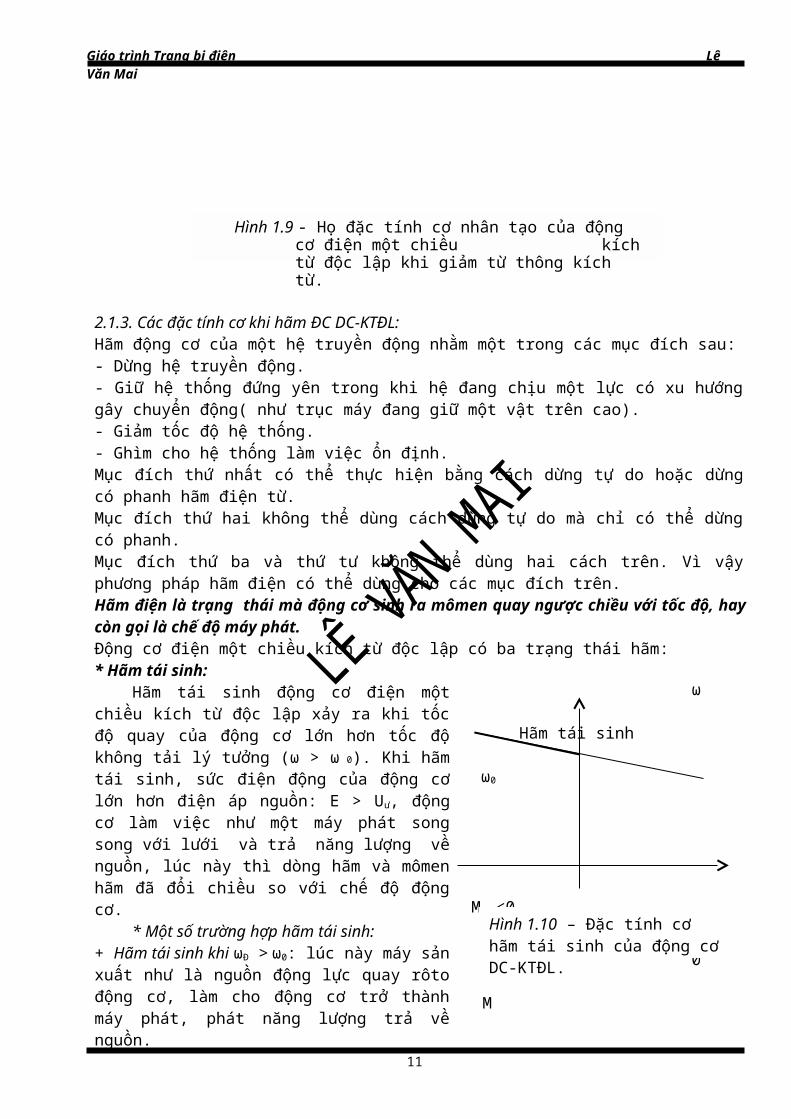
2.1.3. Các đặc tính cơ khi hãm ĐC DC-KTĐL:Hãm động cơ của một hệ truyền động nhằm một trong các mục đích sau:- Dừng hệ truyền động.- Giữ hệ thống đứng yên trong khi hệ đang chịu một lực có xu hướng gây chuyển động( như trục máy đang giữ một vật trên cao).- Giảm tốc độ hệ thống. - Ghìm cho hệ thống làm việc ổn định.Mục đích thứ nhất có thể thực hiện bằng cách dừng tự do hoặc dừng có phanh hãm điện từ.Mục đích thứ hai không thể dùng cách dừng tự do mà chỉ có thể dừng có phanh.Mục đích thứ ba và thứ tư không thể dùng hai cách trên. Vì vậy phương pháp hãm điện có thể dùng cho các mục đích trên.Hãm điện là trạng thái mà động cơ sinh ra mômen quay ngược chiều với tốc độ, hay còn gọi là chế độ máy phát. Động cơ điện một chiều kích từ độc lập có ba trạng thái hãm:* Hãm tái sinh:
Hãm tái sinh động cơ điện một chiều kích từ độc lập xảy ra khi tốc độ quay của động cơ lớn hơn tốc độ không tải lý tưởng (ω > ω 0). Khi hãm tái sinh, sức điện động của động cơ lớn hơn điện áp nguồn: E > Uư, động cơ làm việc như một máy phát song song với lưới và trả năng lượng về nguồn, lúc này thì dòng hãm và mômen hãm đã đổi chiều so với chế độ động cơ.
* Một số trường hợp hãm tái sinh:+ Hãm tái sinh khi ωĐ > ω0: lúc này máy sản xuất như là nguồn động lực quay rôto động cơ, làm cho động cơ trở thành máy phát, phát năng lượng trả về nguồn.
Vì E > Uư, do đó dòng điện phần ứng sẽ thay đổi chiều so với trạng thái động cơ : Mômen động cơ đổi chiều (M < 0) và trở nên ngược chiều với tốc độ, trở thành mômen hãm (Mh).+ Hãm tái sinh khi giảm điện áp phần ứng (Uư2 < Uư1), lúc này Mc là dạng mômen thế năng (Mc =
8
ω
Hãm tái sinh ω0
MĐ <0 MĐ >0
0 M
Hình 1.10 – Đặc tính cơ hãm tái sinh của động cơ DC-KTĐL.

Giáo trình Trang bị điện Lê Văn Mai
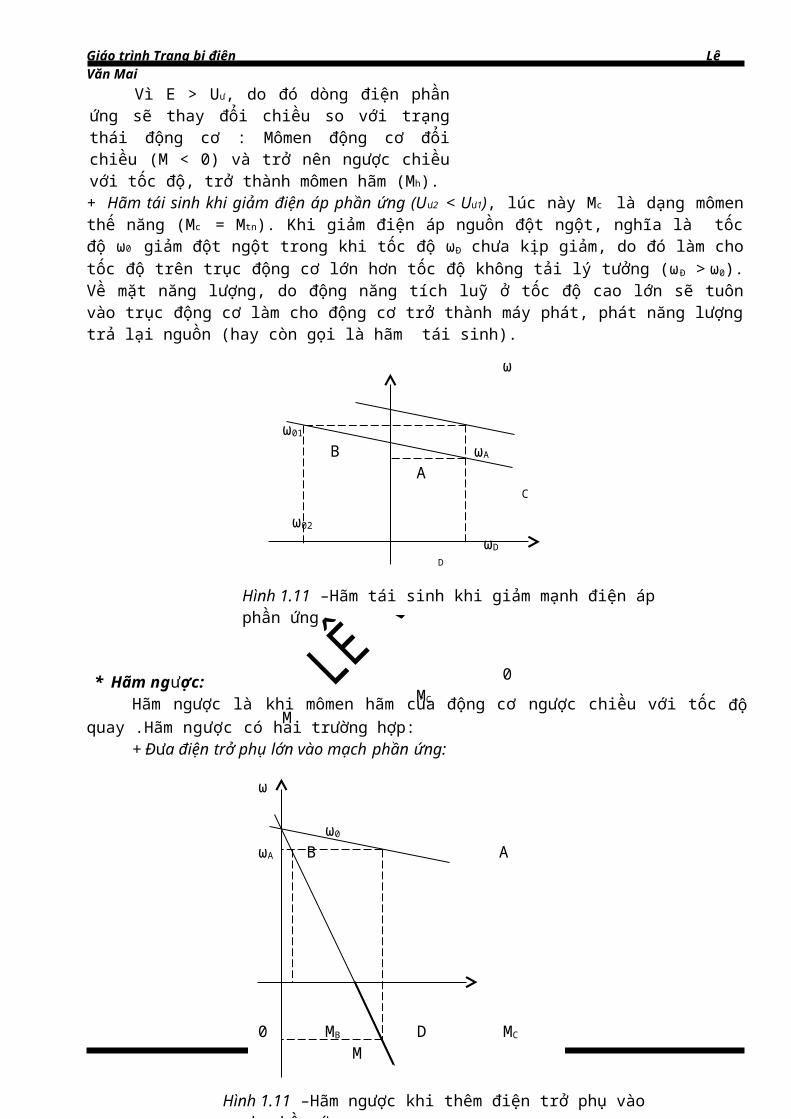
Mtn). Khi giảm điện áp nguồn đột ngột, nghĩa là tốc độ ω0 giảm đột ngột trong khi tốc độ ωĐ chưa kịp giảm, do đó làm cho tốc độ trên trục động cơ lớn hơn tốc độ không tải lý tưởng (ωĐ > ω0). Về mặt năng lượng, do động năng tích luỹ ở tốc độ cao lớn sẽ tuôn vào trục động cơ làm cho động cơ trở thành máy phát, phát năng lượng trả lại nguồn (hay còn gọi là hãm tái sinh).
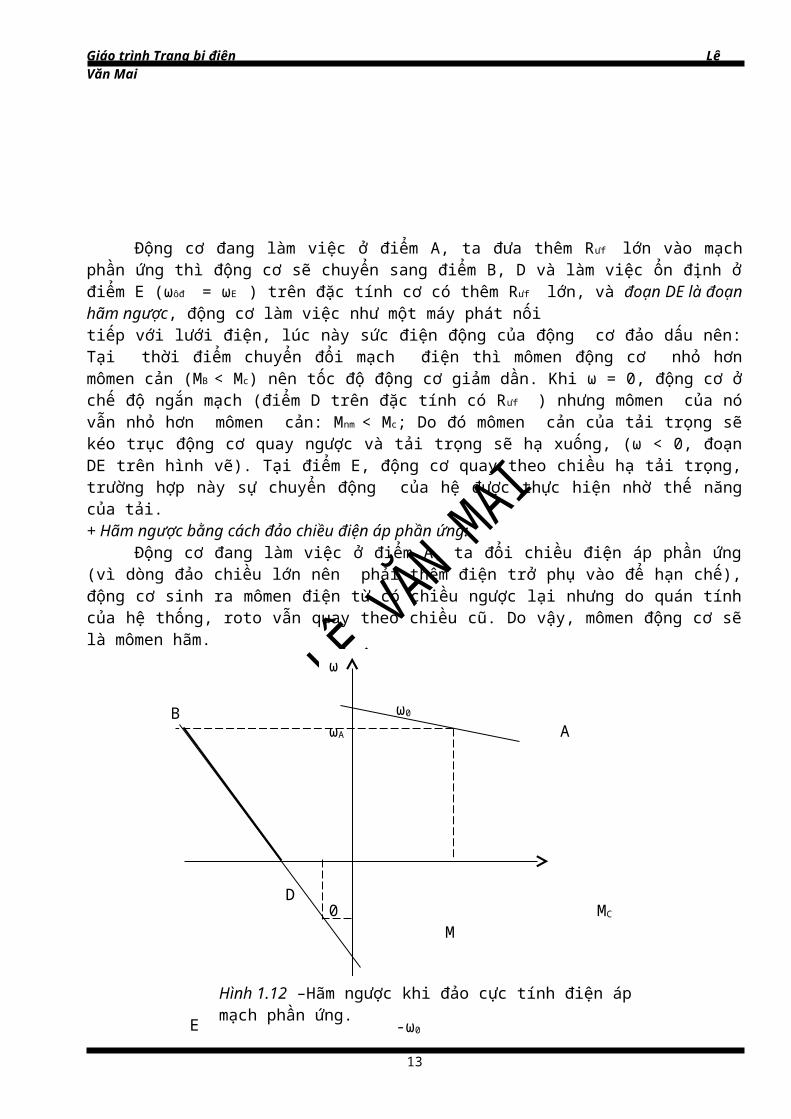
* Hãm ngược:Hãm ngược là khi mômen hãm của động cơ ngược chiều với tốc độ quay .Hãm ngược có hai
trường hợp:+ Đưa điện trở phụ lớn vào mạch phần ứng:
Động cơ đang làm việc ở điểm A, ta đưa thêm Rưf lớn vào mạch phần ứng thì động cơ sẽ chuyển sang điểm B, D và làm việc ổn định ở điểm E (ωôđ = ωE ) trên đặc tính cơ có thêm Rưf lớn, và đoạn DE là đoạn hãm ngược, động cơ làm việc như một máy phát nốitiếp với lưới điện, lúc này sức điện động của động cơ đảo dấu nên: Tại thời điểm chuyển đổi mạch điện thì mômen động cơ nhỏ hơn mômen cản (MB < Mc) nên tốc độ động cơ giảm dần. Khi ω = 0, động cơ ở chế độ ngắn mạch (điểm D trên đặc tính có Rưf ) nhưng mômen của nó vẫn nhỏ hơn mômen cản: Mnm < Mc; Do đó mômen cản của tải trọng sẽ kéo trục động cơ quay ngược và tải trọng sẽ hạ xuống, (ω < 0, đoạn DE trên hình vẽ). Tại điểm E, động cơ quay theo chiều hạ tải trọng, trường hợp này sự chuyển động của hệ được thực hiện nhờ thế năng của tải.+ Hãm ngược bằng cách đảo chiều điện áp phần ứng:
9
ω
ω01
B ωA A C ω02
ωD D
0 MC M
Hình 1.11 –Hãm tái sinh khi giảm mạnh điện áp phần ứng.
ω
ω0
ωA B A
0 MB D MC M
ωE E
Hình 1.11 –Hãm ngược khi thêm điện trở phụ vào mạch phần ứng.

Giáo trình Trang bị điện Lê Văn Mai
Động cơ đang làm việc ở điểm A, ta đổi chiều điện áp phần ứng (vì dòng đảo chiều lớn nên phải thêm điện trở phụ vào để hạn chế), động cơ sinh ra mômen điện từ có chiều ngược lại nhưng do quán tính của hệ thống, roto vẫn quay theo chiều cũ. Do vậy, mômen động cơ sẽ là mômen hãm.
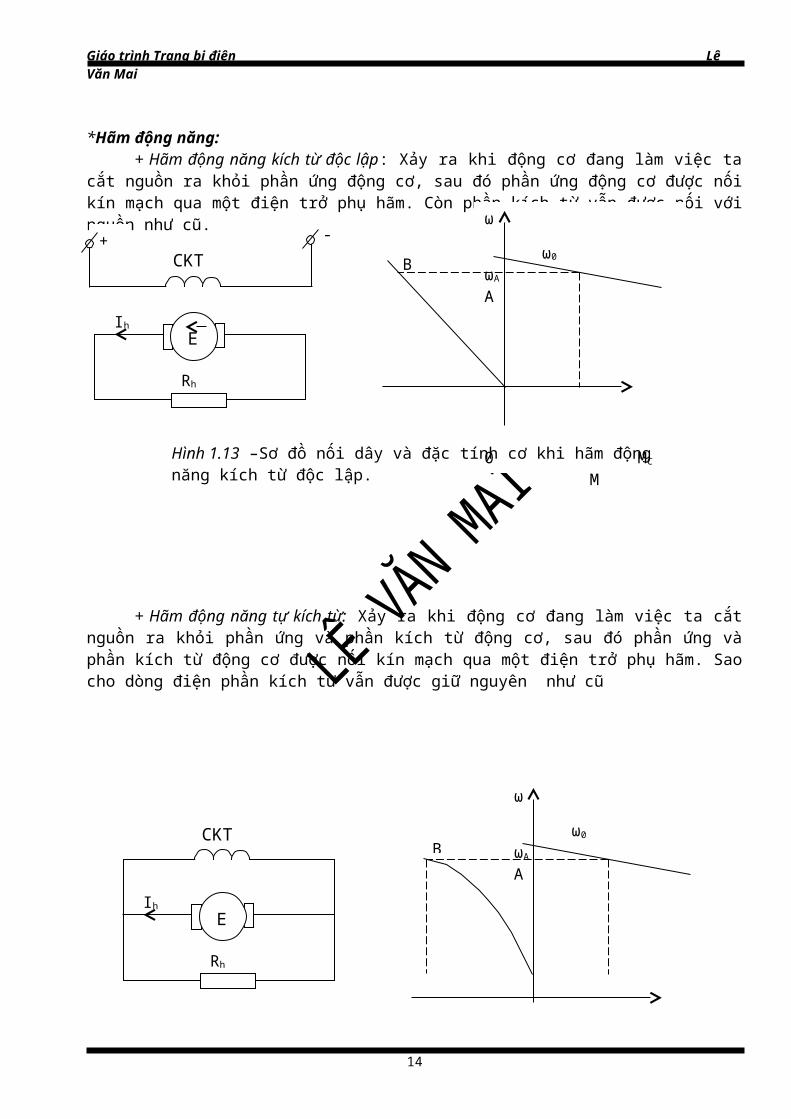
*Hãm động năng:+ Hãm động năng kích từ độc lập: Xảy ra khi động cơ đang làm việc ta cắt nguồn ra khỏi phần
ứng động cơ, sau đó phần ứng động cơ được nối kín mạch qua một điện trở phụ hãm. Còn phần kích từ vẫn được nối với nguồn như cũ.
+ Hãm động năng tự kích từ: Xảy ra khi động cơ đang làm việc ta cắt nguồn ra khỏi phần ứng và phần kích từ động cơ, sau đó phần ứng và phần kích từ động cơ được nối kín mạch qua một điện trở phụ hãm. Sao cho dòng điện phần kích từ vẫn được giữ nguyên như cũ
10
B
D
E
ω
ω0
ωA A
0 MC M
ωE
-ω0
Hình 1.12 –Hãm ngược khi đảo cực tính điện áp mạch phần ứng.
-
Ih
+CKT
E
Rh
Hình 1.13 –Sơ đồ nối dây và đặc tính cơ khi hãm động năng kích từ độc lập.
B
ω
ω0
ωA A
0 MC M
ω
ω0
ωA A
0 MC M
Ih
CKT
Rh
E
Giáo trình Trang bị điện Lê Văn Mai
2.2 Các phương pháp điều chỉnh tốc độ. Khi xem xét phương trình đặc tính cơ của động cơ điện một chiều kích từ độc lập, ta đã biết
quan hệ ω=f(M) phụ thuộc các thông số điện U, φ, RưΣ. Sự thay đổi các thông số này sẽ cho những họ đặc tính cơ khác nhau. Vì vậy, với cùng một mômen tải nào đó, tốc độ động cơ sẽ khác nhau ở các đặc tính cơ khác nhau. Như vậy, động cơ điện một chiều kích từ độc lập (hay kích từ song song) có thể được điều chỉnh tốc độ bằng các phương pháp sau đây:
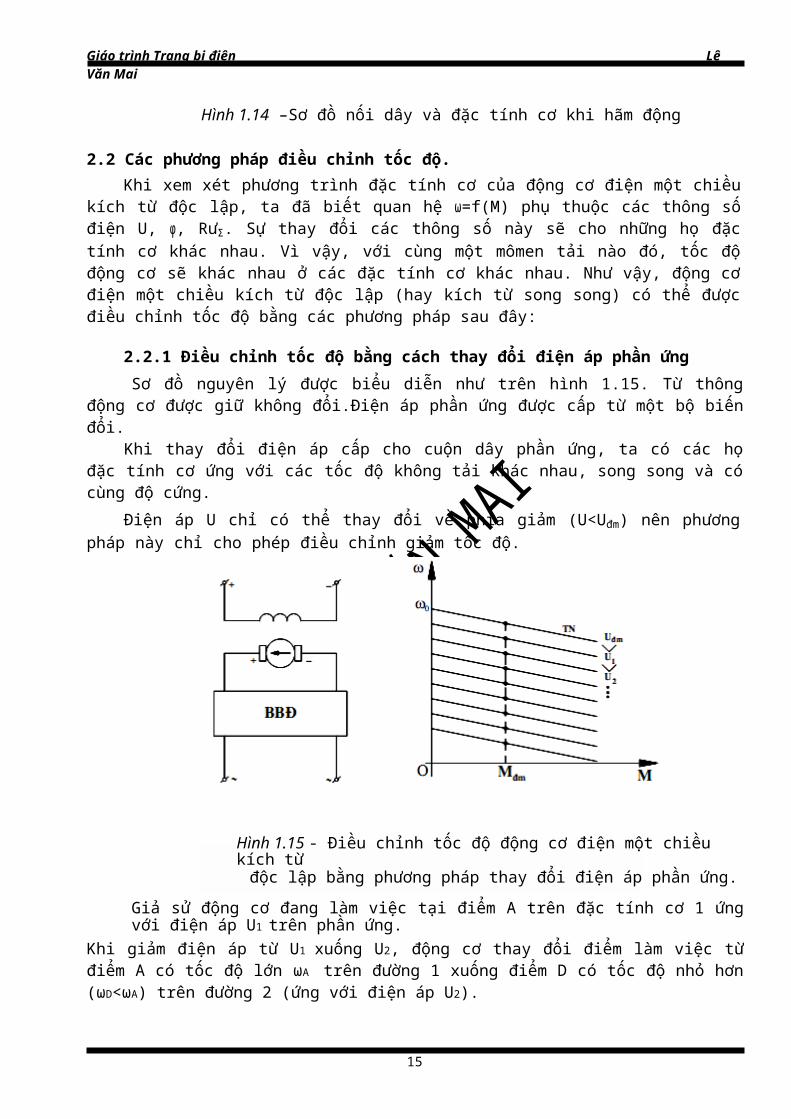
2.2.1 Điều chỉnh tốc độ bằng cách thay đổi điện áp phần ứngSơ đồ nguyên lý được biểu diễn như trên hình 1.15. Từ thông động cơ được giữ không đổi.Điện
áp phần ứng được cấp từ một bộ biến đổi.Khi thay đổi điện áp cấp cho cuộn dây phần ứng, ta có các họ đặc tính cơ ứng với các tốc độ
không tải khác nhau, song song và có cùng độ cứng.Điện áp U chỉ có thể thay đổi về phía giảm (U<Uđm) nên phương pháp này chỉ cho phép điều
chỉnh giảm tốc độ.
Hình 1.15 - Điều chỉnh tốc độ động cơ điện một chiều kích từđộc lập bằng phương pháp thay đổi điện áp phần ứng.
Giả sử động cơ đang làm việc tại điểm A trên đặc tính cơ 1 ứng với điện áp U1 trên phần ứng.Khi giảm điện áp từ U1 xuống U2, động cơ thay đổi điểm làm việc từ điểm A có tốc độ lớn ωA trên đường 1 xuống điểm D có tốc độ nhỏ hơn (ωD<ωA) trên đường 2 (ứng với điện áp U2).
11
Hình 1.14 –Sơ đồ nối dây và đặc tính cơ khi hãm động năng tự kích từ.
B
Giáo trình Trang bị điện Lê Văn Mai
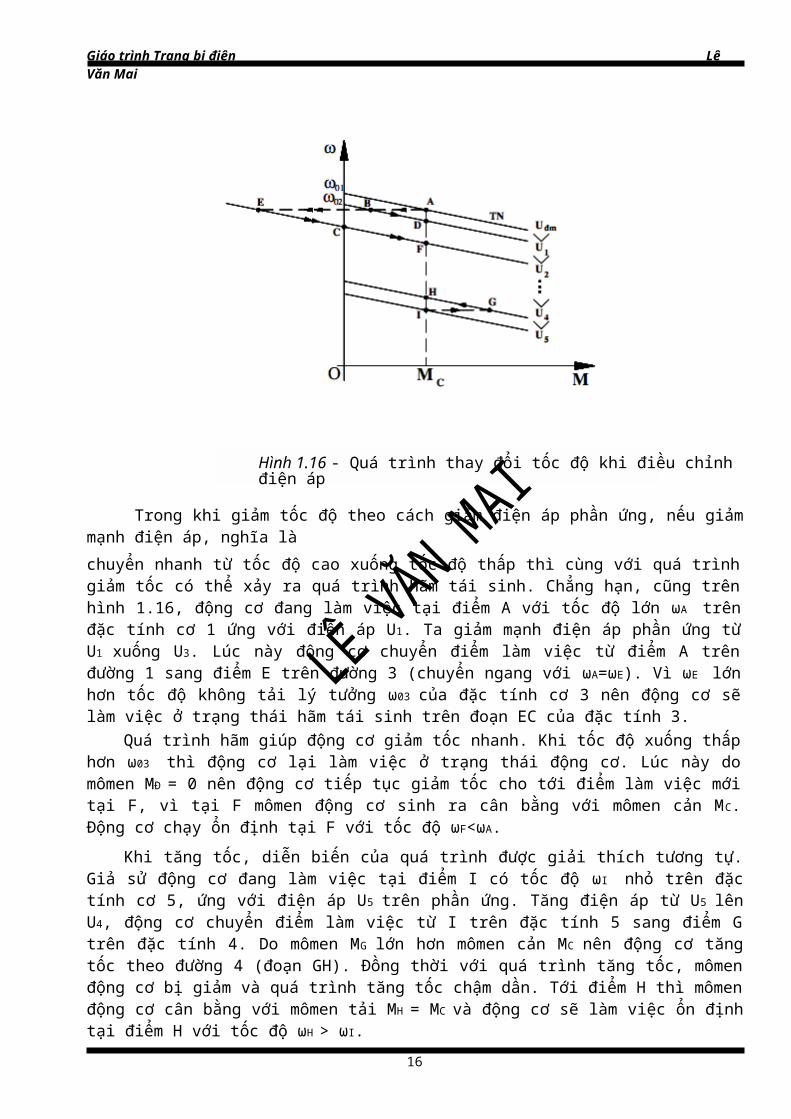
Hình 1.16 - Quá trình thay đổi tốc độ khi điều chỉnh điện áp
Trong khi giảm tốc độ theo cách giảm điện áp phần ứng, nếu giảm mạnh điện áp, nghĩa làchuyển nhanh từ tốc độ cao xuống tốc độ thấp thì cùng với quá trình giảm tốc có thể xảy ra quá trình hãm tái sinh. Chẳng hạn, cũng trên hình 1.16, động cơ đang làm việc tại điểm A với tốc độ lớn ωA
trên đặc tính cơ 1 ứng với điện áp U1. Ta giảm mạnh điện áp phần ứng từ U1 xuống U3. Lúc này động cơ chuyển điểm làm việc từ điểm A trên đường 1 sang điểm E trên đường 3 (chuyển ngang với ωA=ωE). Vì ωE lớn hơn tốc độ không tải lý tưởng ω03 của đặc tính cơ 3 nên động cơ sẽ làm việc ở trạng thái hãm tái sinh trên đoạn EC của đặc tính 3.
Quá trình hãm giúp động cơ giảm tốc nhanh. Khi tốc độ xuống thấp hơn ω03 thì động cơ lại làm việc ở trạng thái động cơ. Lúc này do mômen MĐ = 0 nên động cơ tiếp tục giảm tốc cho tới điểm làm việc mới tại F, vì tại F mômen động cơ sinh ra cân bằng với mômen cản MC. Động cơ chạy ổn định tại F với tốc độ ωF<ωA.
Khi tăng tốc, diễn biến của quá trình được giải thích tương tự. Giả sử động cơ đang làm việc tại điểm I có tốc độ ωI nhỏ trên đặc tính cơ 5, ứng với điện áp U5 trên phần ứng. Tăng điện áp từ U5 lên U4, động cơ chuyển điểm làm việc từ I trên đặc tính 5 sang điểm G trên đặc tính 4. Do mômen MG lớn hơn mômen cản MC nên động cơ tăng tốc theo đường 4 (đoạn GH). Đồng thời với quá trình tăng tốc, mômen động cơ bị giảm và quá trình tăng tốc chậm dần. Tới điểm H thì mômen động cơ cân bằng với mômen tải MH = MC và động cơ sẽ làm việc ổn định tại điểm H với tốc độ ωH > ωI.
Điều chỉnh tốc độ động cơ điện một chiều kích từ độc lập bằng biện pháp thay đổi điện áp phần ứng có các đặc điểm sau:
- Điện áp phần ứng càng giảm, tốc độ động cơ càng nhỏ.- Điều chỉnh trơn trong toàn bộ dải điều chỉnh.- Độ cứng đặc tính cơ giữ không đổi trong toàn bộ dải điều chỉnh.
- Độ sụt tốc tuyệt đối trên toàn dải điều chỉnh ứng với một mômen là như nhau. Độ sụt tốc tương đối sẽ lớn nhất tại đặc tính cơ thấp nhất của dải điều chỉnh. Do vậy, sai số tốc độ tương đối (sai số tĩnh) của đặc tính cơ thấp nhất không vượt quá sai số cho phép cho toàn dải điều chỉnh.
- Dải điều chỉnh của phương pháp này có thể: D ~ 10:1.- Chỉ có thể điều chỉnh tốc độ về phía giảm (vì chỉ có thể thay đổi với Uư ≤ Uđm).- Phương pháp điều chỉnh này cần một bộ nguồn để có thể thay đổi trơn điện áp ra.
2.2.2 Điều chỉnh tốc độ bằng cách thay đổi từ thôngMuốn thay đổi từ thông động cơ, ta tiến hành thay đổi dòng điện kích từ của động cơ qua một
điện trở mắc nối tiếp ở mạch kích từ. Rõ ràng phương pháp này chỉ cho phép tăng điện trở vào mạch kích từ, nghĩa là chỉ có thể giảm dòng điện kích từ (Ikt ≤ Iktđm) do đó chỉ có thể thay đổi về phía giảm từ thông. Khi giảm từ thông, đặc tính dốc hơn và có tốc độ không tải lớn hơn. Họ đặc tính giảm từ thông như hình 1.17.
12
Giáo trình Trang bị điện Lê Văn Mai
Hình 1.17 - Điều chỉnh tốc độ động cơ điện một chiều kích từđộc lập bằng phương pháp thay đổi từ thông kích từ.
Phương pháp điều chỉnh tốc độ bằng thay đổi từ thông có các đặc điểm sau:- Từ thông càng giảm thì tốc độ không tải lý tưởng của đặc tính cơ càng tăng, tốc độ động cơ
càng lớn.- Độ cứng đặc tính cơ giảm khi giảm từ thông.- Có thể điều chỉnh trơn trong dải điều chỉnh: D ≈ 3:1.- Chỉ có thể điều chỉnh thay đổi tốc độ về phía tăng.
- Do độ dốc đặc tính cơ tăng lên khi giảm từ thông nên các đặc tính sẽ cắt nhau và do đó, với tải không lớn (M1) thì tốc độ tăng khi từ thông giảm. Còn ở vùng tải lớn (M2) tốc độ có thể tăng hoặc giảm tùy theo tải. Thực tế, phương pháp này chỉ sử dụng ở vùng tải không quá lớn so với định mức.
- Phương pháp này rất kinh tế vì việc điều chỉnh tốc độ thực hiện ở mạch kích từ với dòng kích từ là (1÷10)% dòng định mức của phần ứng. Tổn hao điều chỉnh thấp.
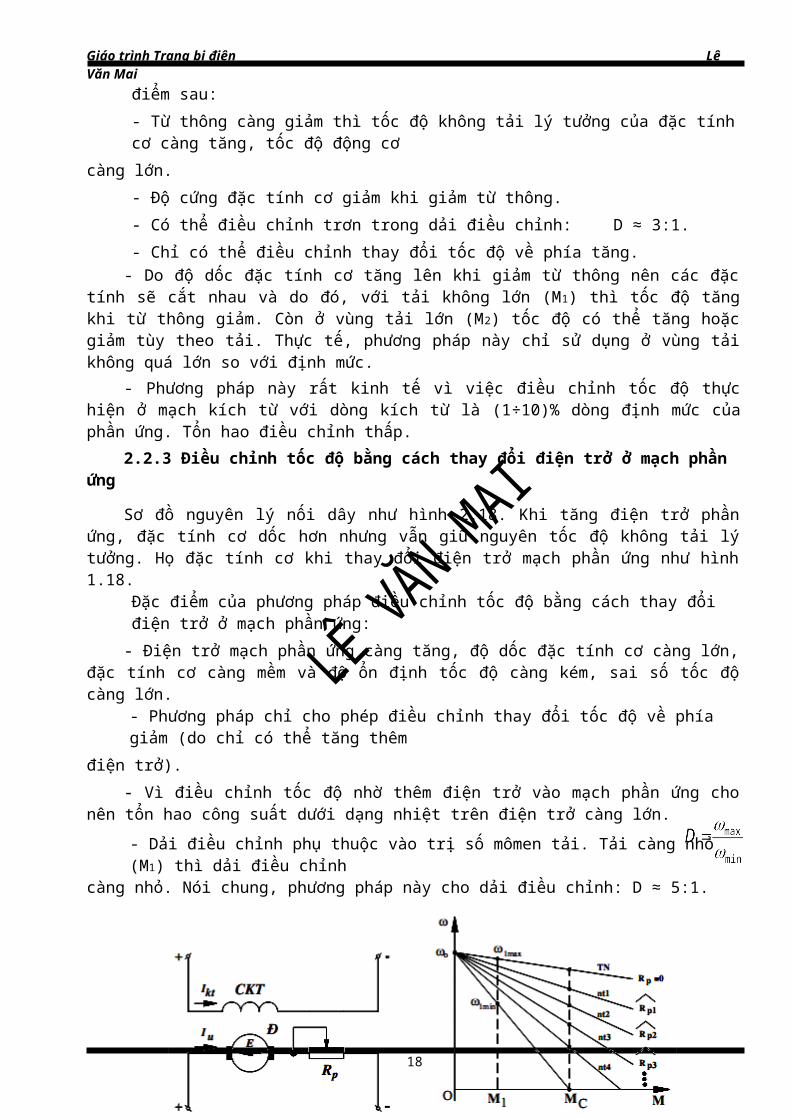
2.2.3 Điều chỉnh tốc độ bằng cách thay đổi điện trở ở mạch phần ứng
Sơ đồ nguyên lý nối dây như hình 2.18. Khi tăng điện trở phần ứng, đặc tính cơ dốc hơn nhưng vẫn giữ nguyên tốc độ không tải lý tưởng. Họ đặc tính cơ khi thay đổi điện trở mạch phần ứng như hình 1.18.
Đặc điểm của phương pháp điều chỉnh tốc độ bằng cách thay đổi điện trở ở mạch phần ứng:- Điện trở mạch phần ứng càng tăng, độ dốc đặc tính cơ càng lớn, đặc tính cơ càng mềm và độ
ổn định tốc độ càng kém, sai số tốc độ càng lớn.- Phương pháp chỉ cho phép điều chỉnh thay đổi tốc độ về phía giảm (do chỉ có thể tăng thêm
điện trở).- Vì điều chỉnh tốc độ nhờ thêm điện trở vào mạch phần ứng cho nên tổn hao công suất dưới
dạng nhiệt trên điện trở càng lớn.
- Dải điều chỉnh phụ thuộc vào trị số mômen tải. Tải càng nhỏ (M1) thì dải điều chỉnhcàng nhỏ. Nói chung, phương pháp này cho dải điều chỉnh: D ≈ 5:1.
13
Giáo trình Trang bị điện Lê Văn Mai
Hình 1.18 - Điều chỉnh tốc độ động cơ điện một chiều kíchtừ độc lập bằng phương pháp thay đổi điện trở phần ứng.
- Về nguyên tắc, phương pháp này cho điều chỉnh trơn nhờ thay đổi điện trở nhưng vì dòngrotor lớn nên việc chuyển đổi điện trở sẽ khó khăn. Thực tế thường sử dụng chuyển đổi theo từng cấp điện trở.
14
Giáo trình Trang bị điện Lê Văn Mai
3. Điều chỉnh tốc độ động cơ không đồng bộ ba pha3.1 Xây dựng đặc tính cơ tự nhiên.
Khi coi 3 pha động cơ là đối xứng, được cấp nguồn bởi nguồn xoay chiều hình sin 3 pha đối xứng và mạch từ động cơ không bão hoà thì có thể xem xét động cơ qua sơ đồ thay thế 1 pha. đó là sơ đồ điện một pha phía stator với các đại lượng điện ở mạch rôto đã quy đổi về stator.
Hình 1.19 - Sơ đồ thay thế một pha động cơ KĐB
Khi cuộn dây stator được cấp điện với điện áp định mức U1ph.đm trên 1 pha mà giữ yên rotor(không quay thì mỗi pha của cuộn dây rotor sẽ xuất hiện một sức điện động E2ph.đm theo nguyên lý của máy biến áp. Hệ số quy đổi sức điện động là:
Từ đó ta có hệ số quy đổi dòng điện:
và hệ số quy đổi trở kháng:
Với các hệ số quy đổi này, các đại lượng điện ở mạch rotor có thể quy đổi về mạch stator theo cách sau:
- Dòng điện: I'2 = kII2
- Điện kháng: X'2 = kXX2
- Điện trở: R'2 = kRR2
Trên sơ đồ thay thế ở hình 2.25, các đại lượng khác là: I0 - Dòng điện từ hóa của động cơ.Rm, Xm - Điện trở, điện kháng mạch từ hóa.I1 - Dòng điện cuộn dây stator.R1, X1 - Điện trở, điện kháng cuộn dây stator.Dòng điện rotor quy đổi về stator có thể tính từ sơ đồ thay thế:
Khi động cơ hoạt động, công suất điện từ P12 từ stator chuyển sang rotor thành công suất cơ Pcơ
đưa ra trên trục động cơ và công suất nhiệt ∆P2 đốt nóng cuộn dây:15
2 2 2
Giáo trình Trang bị điện Lê Văn Mai
P12 = Pcơ + ∆P2 (2.31)Nếu bỏ qua tổn thất phụ thì có thể coi mômen điện từ Mđt của động cơ bằng mômen cơ Mcơ:
Mđt = Mcơ = M
Từ đó: P12 = M.ω0 = Mω + ∆P2 (2.32)
Suy ra:
Công suất nhiệt trong cuộn dây 3 pha là:∆P = 3R' I' 2
Thay vào phương trình tính mômen ta có được:
Trong đó:Xnm = X1 + X'2 là điện kháng ngắn mạch.Phương trình trên biểu thị mối quan hệ M = f(s) = f[s(ự)] gọi là phương trình đặc tính cơ của động cơ
điện xoay chiều 3 pha không đồng bộ.Với những giá trị khác nhau của s (0≤ s ≤1), phương trình đặc tính cơ cho ta những giá trị tương ứng
của M. Đường biểu diễn M = f(s) trên hệ trục tọa độ sOM như hình 2.26, đó là đường đặc tính cơ của động cơ xoay chiều ba pha không đồng bộ.
Đường đặc tính cơ có điểm cực trị gọi là điểm tới hạn K. Tại điểm đó:dM = 0ds
Giải phương trình ta có:
Thay vào phương trình đặc tính cơ ta có:
Vì ta đang xem xét trong giới hạn 0≤ s ≤1 nên giá trị sth và Mth của đặc tính cơ chỉ ứng với dấu (+).
Hình 1.20 - Đặc tính cơ động cơ KĐB.
Ta nhận thấy, đường đặc tính cơ của động cơ không đồng bộ là một đường cong phức tạp và có
16

Giáo trình Trang bị điện Lê Văn Mai
2 đoạn AK và KB, phân giới bởi điểm tới hạn K.Đoạn đặc tính AK gần thẳng và cứng. Trên đoạn này, mômen động cơ tăng thì tốc độ động cơ giảm. Do vậy, động cơ làm việc trên đoạn đặc tính này sẽ ổn định.Đoạn KB cong với độ dốc dương. Trên đoạn này, động cơ làm việc không ổn định.
*Ảnh hưởng của các thông số điện đối với đặc tính cơPhương trình đặc tính cơ cho thấy đường đặc tính cơ của động cơ điện xoay chiều 3 pha KĐB
chịu ảnh hưởng của nhiều thông số điện: Điện áp lưới U1ph, điện trở mạch rotor R2', điện trở R1 vàđiện kháng X1 ở mạch stator, tần số lưới f1, số đôi cực p của động cơ.
Khi các thông số này thay đổi sẽ gây ra biến động các đại lượng:
- Tốc độ đồng bộ:
- Độ trượt giới hạn:
- Mômen tới hạn:
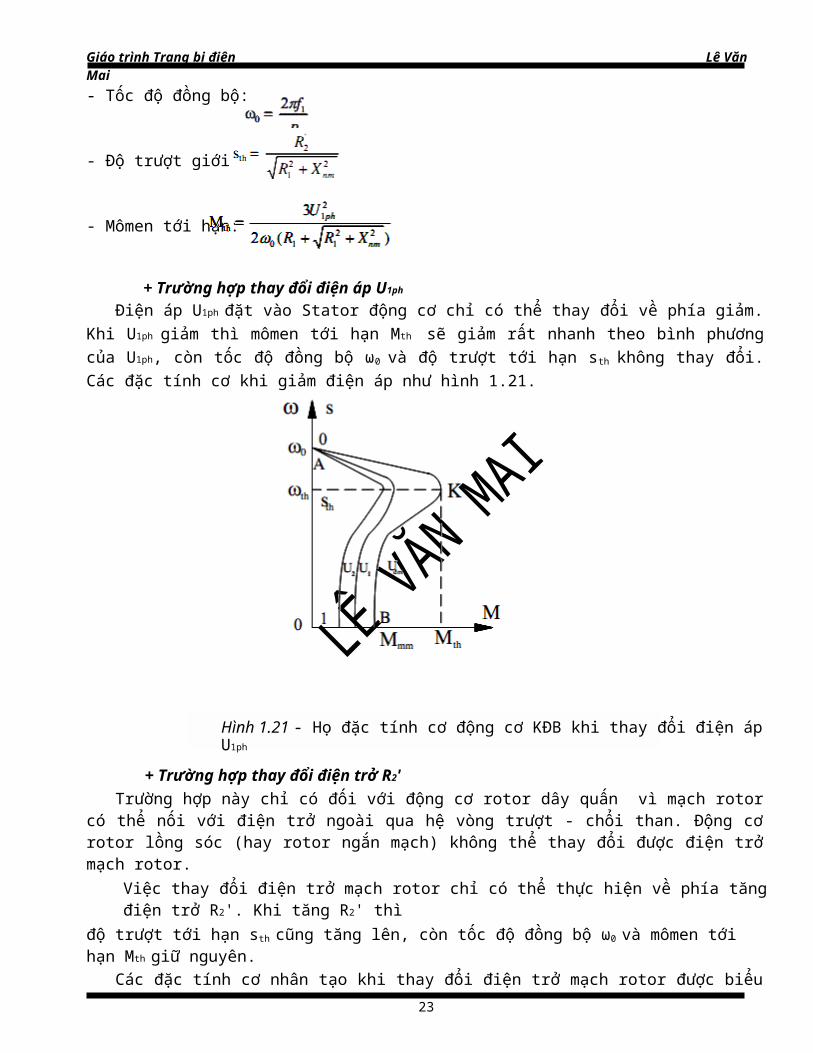
+ Trường hợp thay đổi điện áp U1ph
Điện áp U1ph đặt vào Stator động cơ chỉ có thể thay đổi về phía giảm. Khi U1ph giảm thì mômen tới hạn Mth sẽ giảm rất nhanh theo bình phương của U1ph, còn tốc độ đồng bộ ω0 và độ trượt tới hạn sth không thay đổi. Các đặc tính cơ khi giảm điện áp như hình 1.21.
Hình 1.21 - Họ đặc tính cơ động cơ KĐB khi thay đổi điện áp U1ph
+ Trường hợp thay đổi điện trở R2'Trường hợp này chỉ có đối với động cơ rotor dây quấn vì mạch rotor có thể nối với điện trở ngoài
qua hệ vòng trượt - chổi than. Động cơ rotor lồng sóc (hay rotor ngắn mạch) không thể thay đổi được điện trở mạch rotor.
Việc thay đổi điện trở mạch rotor chỉ có thể thực hiện về phía tăng điện trở R2'. Khi tăng R2' thìđộ trượt tới hạn sth cũng tăng lên, còn tốc độ đồng bộ ω0 và mômen tới hạn Mth giữ nguyên.
Các đặc tính cơ nhân tạo khi thay đổi điện trở mạch rotor được biểu diễn như hình vẽ. Điện trở mạch rotor càng lớn thì đặc tính càng dốc.
17
Giáo trình Trang bị điện Lê Văn Mai
Hình 1.22 - Sơ đồ nối và họ đặc tính cơ động cơ KĐB khi thay đổiđiện trở mạch rôto.
+ Trường hợp thay đổi điện trở R1, điện kháng X1 ở mạch StatorTrường hợp này cũng chỉ thay đổi về phía tăng R1 hoặc X1. Sơ đồ nối dây như hình 1.23.
Hình1.23 - Sơ đồ nối và họ đặc tính cơ động cơ KĐB khi nối thêm R1
hoặc X1 vào mạch stator
Khi nối thêm vào mạch Stator R1 hoặc X1 thì ta thấy tốc độ đồng bộ ω 0 không đổi, còn độ trượttới hạn sth và mômen tới hạn Mth đều giảm. Hình vẽ 1.23 biểu thị các đặc tính cơ nhân tạo khi tăng trở kháng và điện trở mạch stator.
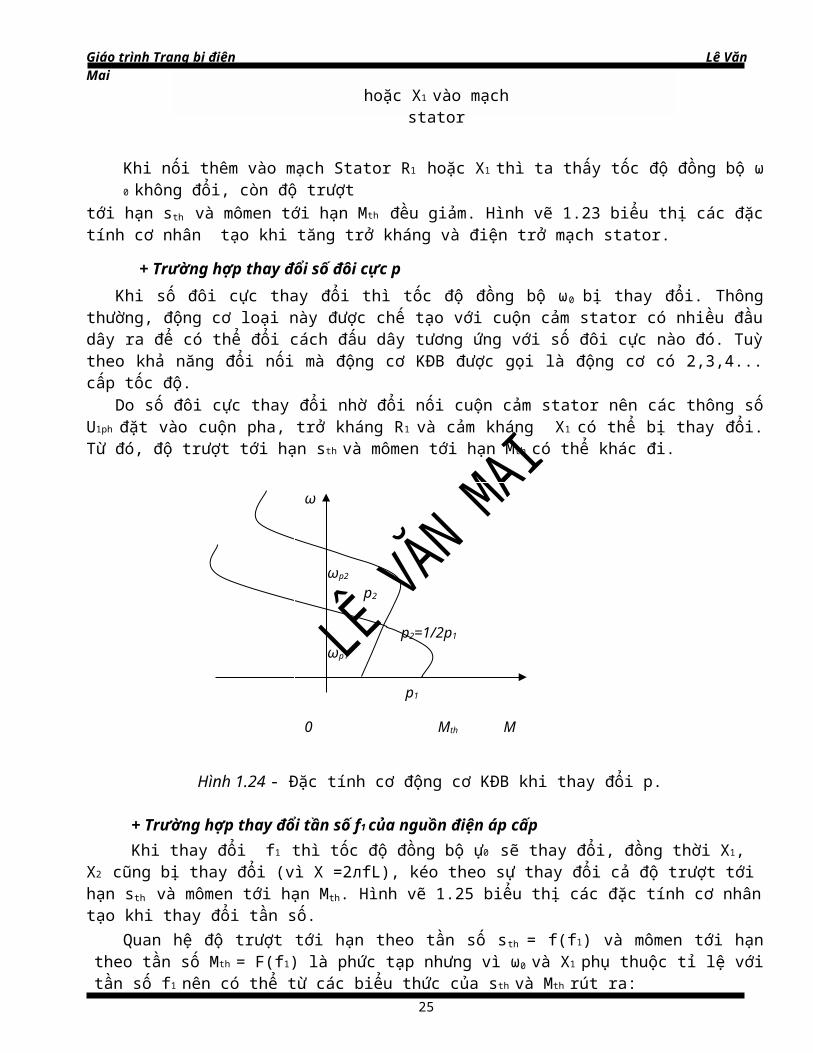
+ Trường hợp thay đổi số đôi cực pKhi số đôi cực thay đổi thì tốc độ đồng bộ ω0 bị thay đổi. Thông thường, động cơ loại này được chế
tạo với cuộn cảm stator có nhiều đầu dây ra để có thể đổi cách đấu dây tương ứng với số đôi cực nào đó. Tuỳ theo khả năng đổi nối mà động cơ KĐB được gọi là động cơ có 2,3,4... cấp tốc độ.
Do số đôi cực thay đổi nhờ đổi nối cuộn cảm stator nên các thông số U1ph đặt vào cuộn pha, trở kháng R1 và cảm kháng X1 có thể bị thay đổi. Từ đó, độ trượt tới hạn sth và mômen tới hạn Mth có thể khác đi.
18
ω
ω1
Sth
R1f X1f TN
0 Mth M
Giáo trình Trang bị điện Lê Văn Mai
Hình 1.24 - Đặc tính cơ động cơ KĐB khi thay đổi p.
+ Trường hợp thay đổi tần số f1 của nguồn điện áp cấpKhi thay đổi f1 thì tốc độ đồng bộ ự0 sẽ thay đổi, đồng thời X1, X2 cũng bị thay đổi (vì X =2лfL),
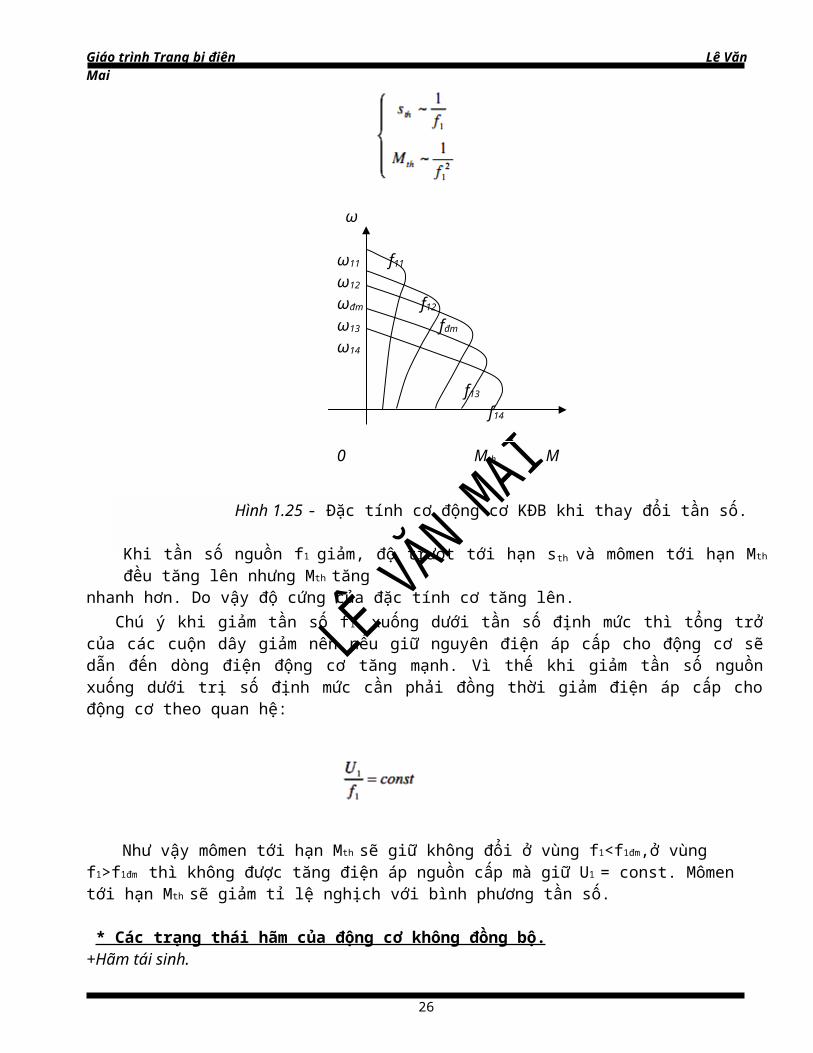
kéo theo sự thay đổi cả độ trượt tới hạn sth và mômen tới hạn Mth. Hình vẽ 1.25 biểu thị các đặc tính cơ nhân tạo khi thay đổi tần số.
Quan hệ độ trượt tới hạn theo tần số sth = f(f1) và mômen tới hạn theo tần số Mth = F(f1) là phức tạp nhưng vì ω0 và X1 phụ thuộc tỉ lệ với tần số f1 nên có thể từ các biểu thức của sth và Mth rút ra:
Hình 1.25 - Đặc tính cơ động cơ KĐB khi thay đổi tần số.
Khi tần số nguồn f1 giảm, độ trượt tới hạn sth và mômen tới hạn Mth đều tăng lên nhưng Mth tăngnhanh hơn. Do vậy độ cứng của đặc tính cơ tăng lên.
Chú ý khi giảm tần số f1 xuống dưới tần số định mức thì tổng trở của các cuộn dây giảm nên nếu giữ nguyên điện áp cấp cho động cơ sẽ dẫn đến dòng điện động cơ tăng mạnh. Vì thế khi giảm tần số nguồn xuống dưới trị số định mức cần phải đồng thời giảm điện áp cấp cho động cơ theo quan hệ:
19
ω
ωp2
p2
p2=1/2p1
ωp1
p1
0 Mth M
ω
ω11 f11
ω12
ωđm f12
ω13 fđm
ω14
f13
f14
0 Mth M

Giáo trình Trang bị điện Lê Văn Mai
Như vậy mômen tới hạn Mth sẽ giữ không đổi ở vùng f1<f1đm,ở vùng f1>f1đm thì không được tăng điện áp nguồn cấp mà giữ U1 = const. Mômen tới hạn Mth sẽ giảm tỉ lệ nghịch với bình phương tần số.
* Các trạng thái hãm của động cơ không đồng bộ.+Hãm tái sinh.
Xảy ra khi tốc độ động cơ lớn hơn tốc độ đồng bộ ωĐ > ω1. Động cơ làm việc như máy phát trả năng lượng về nguồn.
- Khi thay đổi f hoặc p.- Khi tải có tính thế năng.
+ Hãm ngược.Xảy ra khi rôto quay ngược chiều với từ trường quay. Có hai trường hợp hãm ngược:
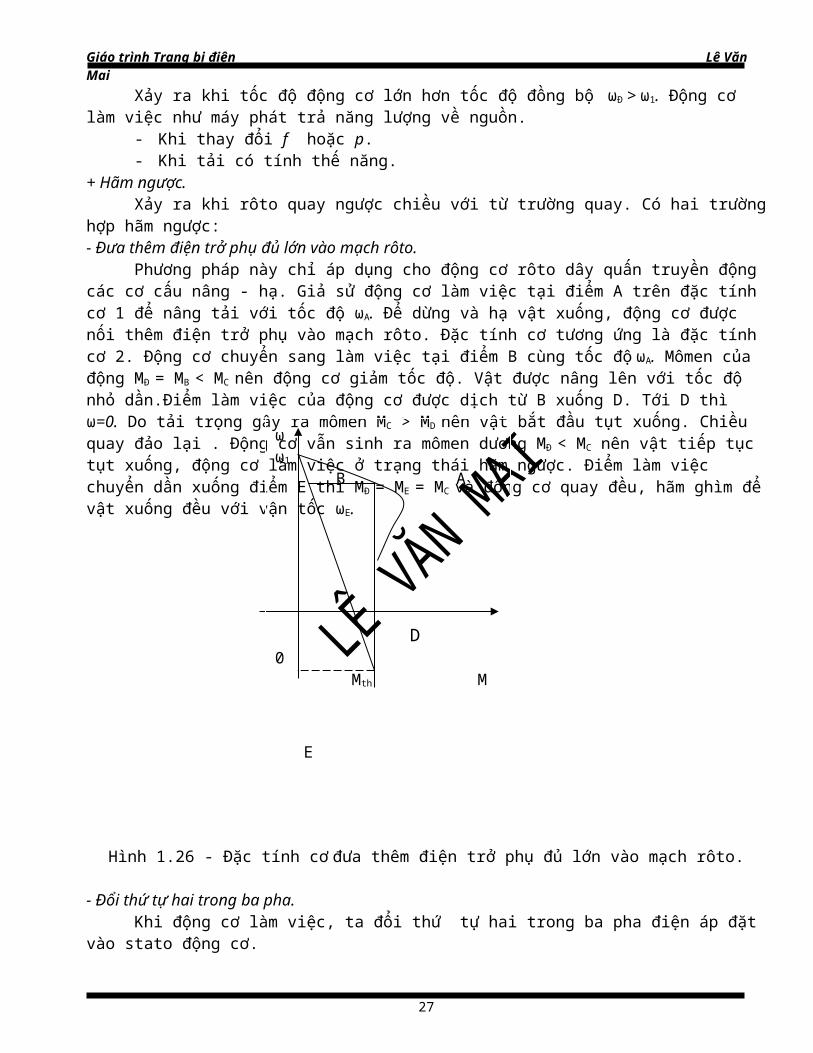
- Đưa thêm điện trở phụ đủ lớn vào mạch rôto.Phương pháp này chỉ áp dụng cho động cơ rôto dây quấn truyền động các cơ cấu nâng - hạ. Giả sử
động cơ làm việc tại điểm A trên đặc tính cơ 1 để nâng tải với tốc độ ωA. Để dừng và hạ vật xuống, động cơ được nối thêm điện trở phụ vào mạch rôto. Đặc tính cơ tương ứng là đặc tính cơ 2. Động cơ chuyển sang làm việc tại điểm B cùng tốc độ ωA. Mômen của động MĐ = MB < MC nên động cơ giảm tốc độ. Vật được nâng lên với tốc độ nhỏ dần.Điểm làm việc của động cơ được dịch từ B xuống D. Tới D thì ω=0. Do tải trọng gây ra mômen MC > MD nên vật bắt đầu tụt xuống. Chiều quay đảo lại . Động cơ vẫn sinh ra mômen dương MĐ < MC nên vật tiếp tục tụt xuống, động cơ làm việc ở trạng thái hãm ngược. Điểm làm việc chuyển dần xuống điểm E thì MĐ = ME = MC và động cơ quay đều, hãm ghìm để vật xuống đều với vận tốc ωE.
Hình 1.26 - Đặc tính cơ đưa thêm điện trở phụ đủ lớn vào mạch rôto.
- Đổi thứ tự hai trong ba pha.Khi động cơ làm việc, ta đổi thứ tự hai trong ba pha điện áp đặt vào stato động cơ.
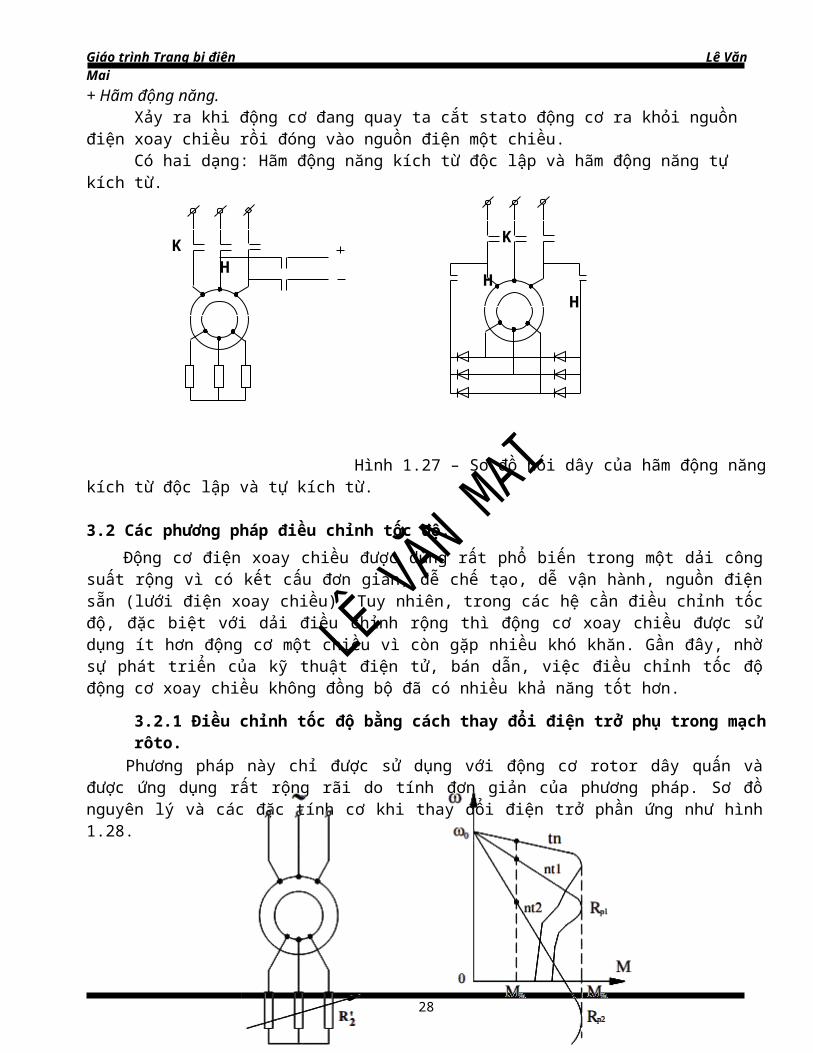
+ Hãm động năng.Xảy ra khi động cơ đang quay ta cắt stato động cơ ra khỏi nguồn điện xoay chiều rồi đóng vào
nguồn điện một chiều.Có hai dạng: Hãm động năng kích từ độc lập và hãm động năng tự kích từ.
20
ωω1
B A
D0 Mth M
E
K H K
H H

Giáo trình Trang bị điện Lê Văn Mai
Hình 1.27 – Sơ đồ nối dây của hãm động năng kích từ độc lập và tự kích từ.
3.2 Các phương pháp điều chỉnh tốc độ.Động cơ điện xoay chiều được dùng rất phổ biến trong một dải công suất rộng vì có kết cấu đơn
giản, dễ chế tạo, dễ vận hành, nguồn điện sẵn (lưới điện xoay chiều). Tuy nhiên, trong các hệ cần điều chỉnh tốc độ, đặc biệt với dải điều chỉnh rộng thì động cơ xoay chiều được sử dụng ít hơn động cơ một chiều vì còn gặp nhiều khó khăn. Gần đây, nhờ sự phát triển của kỹ thuật điện tử, bán dẫn, việc điều chỉnh tốc độ động cơ xoay chiều không đồng bộ đã có nhiều khả năng tốt hơn.
3.2.1 Điều chỉnh tốc độ bằng cách thay đổi điện trở phụ trong mạch rôto.Phương pháp này chỉ được sử dụng với động cơ rotor dây quấn và được ứng dụng rất rộng rãi do
tính đơn giản của phương pháp. Sơ đồ nguyên lý và các đặc tính cơ khi thay đổi điện trở phần ứng như hình 1.28.
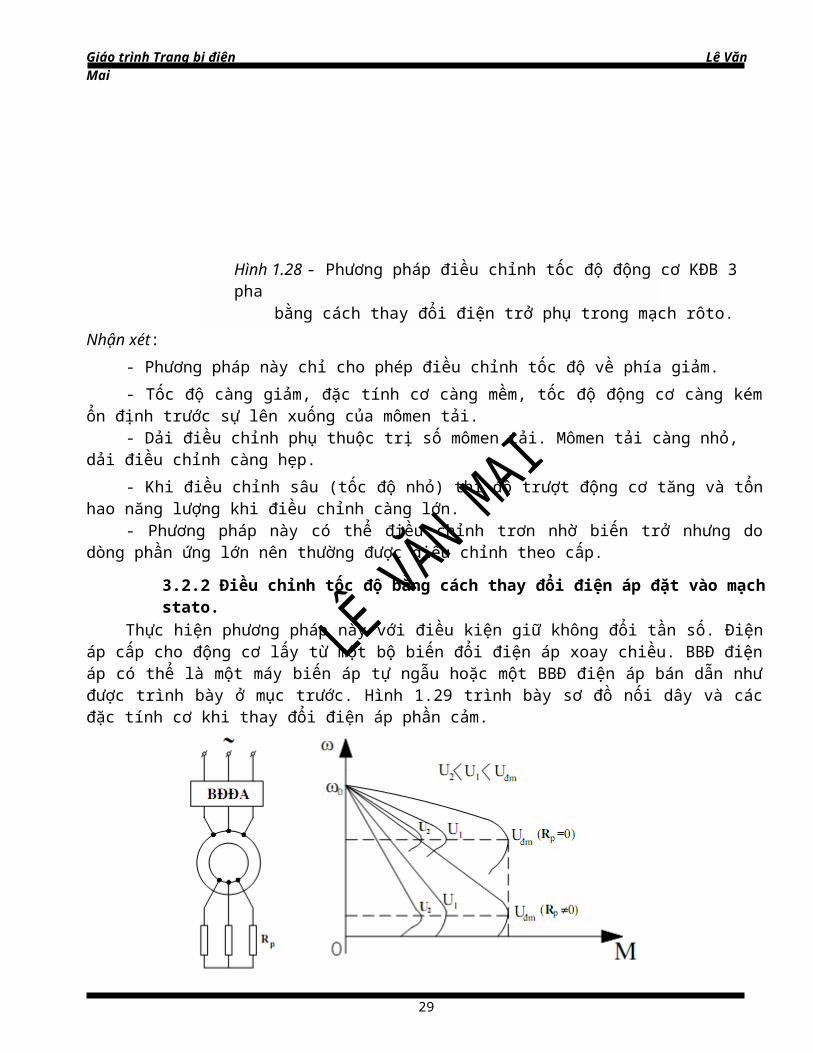
Hình 1.28 - Phương pháp điều chỉnh tốc độ động cơ KĐB 3 phabằng cách thay đổi điện trở phụ trong mạch rôto.
Nhận xét:- Phương pháp này chỉ cho phép điều chỉnh tốc độ về phía giảm.- Tốc độ càng giảm, đặc tính cơ càng mềm, tốc độ động cơ càng kém ổn định trước sự lên xuống
của mômen tải.- Dải điều chỉnh phụ thuộc trị số mômen tải. Mômen tải càng nhỏ, dải điều chỉnh càng hẹp.- Khi điều chỉnh sâu (tốc độ nhỏ) thì độ trượt động cơ tăng và tổn hao năng lượng khi điều chỉnh
càng lớn.- Phương pháp này có thể điều chỉnh trơn nhờ biến trở nhưng do dòng phần ứng lớn nên thường
được điều chỉnh theo cấp.
21

Giáo trình Trang bị điện Lê Văn Mai
3.2.2 Điều chỉnh tốc độ bằng cách thay đổi điện áp đặt vào mạch stato.Thực hiện phương pháp này với điều kiện giữ không đổi tần số. Điện áp cấp cho động cơ lấy từ
một bộ biến đổi điện áp xoay chiều. BBĐ điện áp có thể là một máy biến áp tự ngẫu hoặc một BBĐ điện áp bán dẫn như được trình bày ở mục trước. Hình 1.29 trình bày sơ đồ nối dây và các đặc tính cơ khi thay đổi điện áp phần cảm.
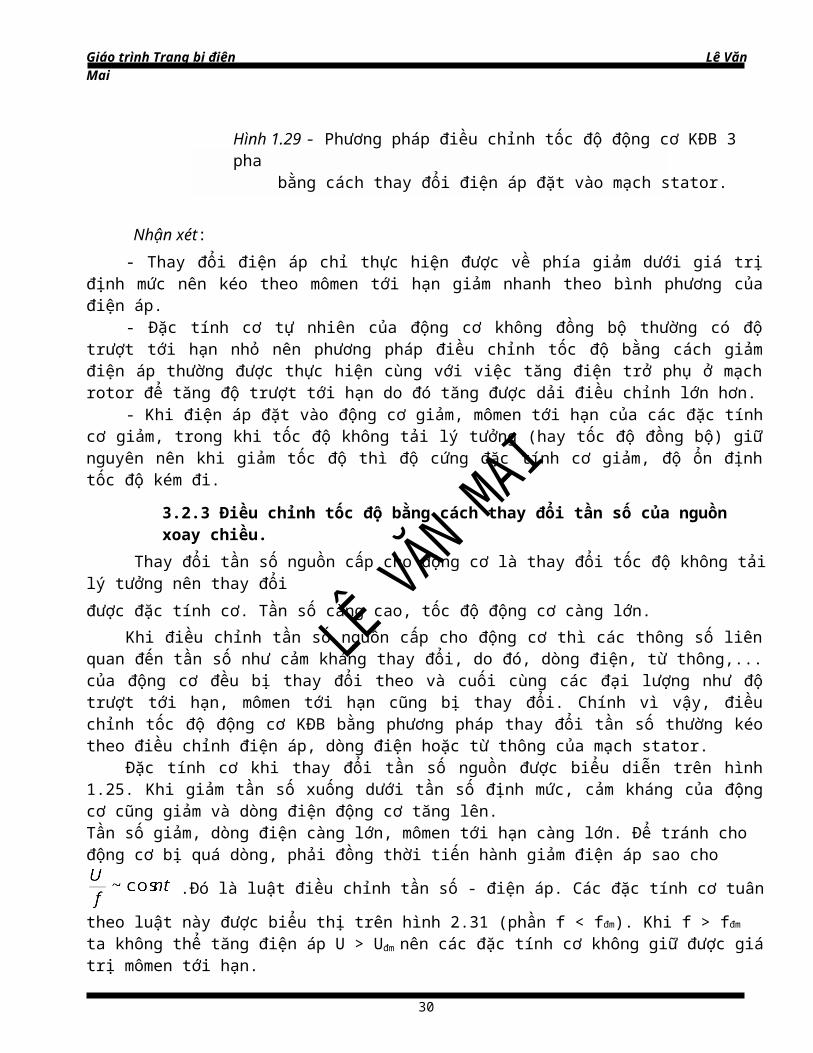
Hình 1.29 - Phương pháp điều chỉnh tốc độ động cơ KĐB 3 phabằng cách thay đổi điện áp đặt vào mạch stator.
Nhận xét:- Thay đổi điện áp chỉ thực hiện được về phía giảm dưới giá trị định mức nên kéo theo mômen tới
hạn giảm nhanh theo bình phương của điện áp.- Đặc tính cơ tự nhiên của động cơ không đồng bộ thường có độ trượt tới hạn nhỏ nên phương pháp
điều chỉnh tốc độ bằng cách giảm điện áp thường được thực hiện cùng với việc tăng điện trở phụ ở mạch rotor để tăng độ trượt tới hạn do đó tăng được dải điều chỉnh lớn hơn.
- Khi điện áp đặt vào động cơ giảm, mômen tới hạn của các đặc tính cơ giảm, trong khi tốc độ không tải lý tưởng (hay tốc độ đồng bộ) giữ nguyên nên khi giảm tốc độ thì độ cứng đặc tính cơ giảm, độ ổn định tốc độ kém đi.
3.2.3 Điều chỉnh tốc độ bằng cách thay đổi tần số của nguồn xoay chiều.Thay đổi tần số nguồn cấp cho động cơ là thay đổi tốc độ không tải lý tưởng nên thay đổi
được đặc tính cơ. Tần số càng cao, tốc độ động cơ càng lớn.Khi điều chỉnh tần số nguồn cấp cho động cơ thì các thông số liên quan đến tần số như cảm kháng
thay đổi, do đó, dòng điện, từ thông,... của động cơ đều bị thay đổi theo và cuối cùng các đại lượng như độ trượt tới hạn, mômen tới hạn cũng bị thay đổi. Chính vì vậy, điều chỉnh tốc độ động cơ KĐB bằng phương pháp thay đổi tần số thường kéo theo điều chỉnh điện áp, dòng điện hoặc từ thông của mạch stator.
Đặc tính cơ khi thay đổi tần số nguồn được biểu diễn trên hình 1.25. Khi giảm tần số xuống dưới tần số định mức, cảm kháng của động cơ cũng giảm và dòng điện động cơ tăng lên.Tần số giảm, dòng điện càng lớn, mômen tới hạn càng lớn. Để tránh cho động cơ bị quá dòng, phải đồng
thời tiến hành giảm điện áp sao cho .Đó là luật điều chỉnh tần số - điện áp. Các đặc tính cơ tuân
theo luật này được biểu thị trên hình 2.31 (phần f < fđm). Khi f > fđm ta không thể tăng điện áp U > Uđm nên các đặc tính cơ không giữ được giá trị mômen tới hạn.
Người ta cũng thường dùng cả luật điều chỉnh tần số - dòng điện.
22
Giáo trình Trang bị điện Lê Văn Mai
3.5.4 Điều chỉnh tốc độ bằng cách thay đổi số đôi cực của động cơ.
Đây là cách điều chỉnh tốc độ có cấp. Đặc tính cơ thay đổi vì tốc độ đồng bộ thay đổi theo số đôi cực.
Động cơ thay đổi được số đôi cực là động cơ được chế tạo đặc biệt để cuộn dây stator có thể thay đổi được cách nối tương ứng với các số đôi cực khác nhau. Các đầu dây để đổi nối được đưa ra các hộp đấu dây ở vỏ động cơ. Số đôi cực của cuộn dây rotor cũng phải thay đổi như cuộn dây stator. Điều này khó thực hiện được đối với động cơ rotor dây quấn, còn đối với rotor lồng sóc thì nó lại có khả năng tự thay đổi số đôi cực ứng với stator. Do vậy, phương pháp này được sử dụng chủ yếu cho động cơ rotor lồng sóc. Các động cơ chế tạo sẵn các cuộn dây stator có thể đổi nối để thay đổi số đôi cực đều có rotor lồng sóc. Tỷ lệ chuyển đổi số đôi cực có thể là 2:1, 3:1, 4:1 hay tới 8:1.
Bài 2: Tự động khống chế truyền động điện1. Khái niệm chung.
23

Giáo trình Trang bị điện Lê Văn Mai
1.1 Khái niệm về tự động khống chế.Hệ thống tự động khống chế truyền động điện(TĐKC –TĐĐ) là một tập hợp các thiết bị hình
thành các mạch điện hoàn chỉnh, điều khiển sự làm việc của động cơ trong các hệ thống tự động. Gồm hai phần:
- Phần động lực: tiêu thụ công suất lớn.- Phần điều khiển: tiêu thụ công suất nhỏ.
Chức năng:
*Chức năng điều khiển: Thực hiện việc đóng, cắt điện vào động cơ điện theo yêu cầu công nghệ đặt ra. Thực hiện chức
năng này do các thiết bị đóng cắt : cầu dao, áptômát, côngtắctơ.
* Chức năng khống chế: Nhằm đảm bảo đóng cắt điện vào động cơ đúng thời điểm yêu cầu theo chương trình định trước.Chức năng khống chế thể hiện ở việc khống chế các quy trình khởi động, hãm đảo chiều, điều
chỉnh tốc độ động cơ…Thực hiện chức năng khống chế chủ yếu do các khí cụ: rơle thời gian, rơle tốc độ, rơle dòng điện,
công tắc hành trình…
* Chức năng bảo vệ: Nhằm đảm bảo cho hệ thống làm việc an toàn( người và thiết bị).Thực hiện chức năng này là do các khí cụ bảo vệ.
1.2 Các yêu cầu của TĐKC:
*Phù hợp nhất với yêu cầu công nghệ đặt ra:Xuất phát từ yêu cầu công nghệ nên mới thiết kế ra hệ thống. Chỉ tiêu này thể hiện trên các mặt
của quá trình sản xuất: năng suất, chất lượng, hiệu quả.
*Điều khiển đơn giản, tin cậy:Tính đơn giản được thể hiện: - Số lượng thiết bị là ít nhất.
- Số lượng dây nối là ít nhất. - Chủng loại thiết bị đồng nhất.
Tính tin cậy thể hiện: - Sử dụng thiết bị ít hỏng hóc.- Tuổi thọ, tần số đóng cắt phù hợp.- Thiết bị bảo vệ đầy đủ, tác động phân minh.- Mạch không được xảy ra sự cố khi nhân viên vận hành thao tác sai.
*Điều khiển linh hoạt:- Chuyển đổi chế độ làm việc từ tự động sang bằng tay một một cách thuận tiện và nhanh chóng.- Chuyển từ quá trình sản xuất nay sang quá trình sản xuất khác một cách thuận tiện và nhanh
chóng.- Từ một chỗ có thể điều khiển được nhiều đối tượng và từ nhiều chỗ có thể điểu khiển được một
đối tượng.
*Đơn giản cho việc kiểm tra, phát hiện sự cố:- Những khí cụ thường xuyên phải bảo dưỡng, kiểm tra được bố trí ở những vị trí thuận lợi.- Bố trí các thiết bị theo các cụm chức năng mà chúng phục vụ.- Các đầu nối dây được đánh số thứ tự ở hai đầu đường dây.- Dùng các dây dẫn có màu khác nhau trong mạch điều khiển.
*Tác động phân minh lúc bình thường cũng như có sự cố: Mạch phải đảm bảo khi bình thường phải hoạt động đúng yêu cầu. Khi có sự cố phải có tín hiệu
báo sự cố và phải dừng máy ngay.
24
Giáo trình Trang bị điện Lê Văn Mai
*Kích thước và giá thành nhỏ nhất:
*An toàn cho người và thiết bị trong quá trình lắp đặt, vận hành, kiểm tra, sữa chữa:
1.3 Phương pháp thể hiện sơ đồ điện:
1.3.1 Sơ đồ cấu trúc: là sơ đồ biểu diễn sơ đồ điện dưới dạng các khối chức năng và mối quan hệ giữa chúng bằng các mũi tên chỉ hướng liên quan. Chỉ dùng trong thiết kế sơ bộ.
1.3.2 Sơ đồ khai triển: là sơ đồ thể hiện hệ thống khi đã có thiết kế cụ thể, trên đó các phần tử của khí cụ được biểu diễn dưới dang khai triển tuỳ theo nhiệm vụ của nó.
Sơ đồ dạng này giúp cho người đọc nắm được nguyên lý làm việc của mạch điện, mối quan hệ giữa các phần tử và giữa các khí cụ điện với nhau.
Nhược điểm của sơ đồ dạng này là thể hiện quá chi tiết các phần tử. Kể cả các phần phụ không liên quan trực tiếp đến nguyên lý làm việc của hệ (ví dụ các mạch phụ về đo lường, tín hiệu …).
1.3.3 Sơ đồ nguyên lý: là dạng của sơ đồ khai triền trên đó những phần tử không quan trọng có thể bỏ qua.
1.3.4 Sơ đồ lắp ráp: phục vụ cho công việc lắp ráp. Nó biểu thị vị trí cụ thể của từng khí cụ điện trong hệ thống khống chế và các vị trí nối dây của các chi tiết bằng các con số định trước trong thuyết minh.
1.3.5 Một số quy định khi thể hiện sơ đồ nguyên lý:- Khi thể hiện trên sơ đồ nguyên lý, các thiết bị, khí cụ, chi tiết được thể hiện ở trang thái
“thường”.Trạng thái “thường” là trạng thái các thiết bị, khí cụ đó không chịu tác động của bên ngoài về cơ,
nhiệt, điện, quang …Ví dụ: Trạng thái “thường” của cầu dao, áptômát: trạng thái mở.Của rơle, côngtắctơ : *Cuộn dây (cuộn hút) không có điện.
*Tiếp điểm thường mở ở trạng thái mở. *Tiếp điểm thường đóng ở trạng thái đóng.
- Quy định về cách bố trí cầu chì trong mạch điện: + Không được bố trí cầu chì trên dây trung tính, dây nối đất. Chỉ được bố trí cầu chì trên dây pha của mạng xoay chiều. + Đối với mạng một chiều, cầu chì được bố trí trên cả hai dây. + Cầu chì được bố trí sau cầu dao.
2. Tự động khống chế ĐKB roto lồng sóc
2.1 Mạch khởi động trực tiếp không đảo chiều và đảo chiều:
25
Giáo trình Trang bị điện Lê Văn Mai
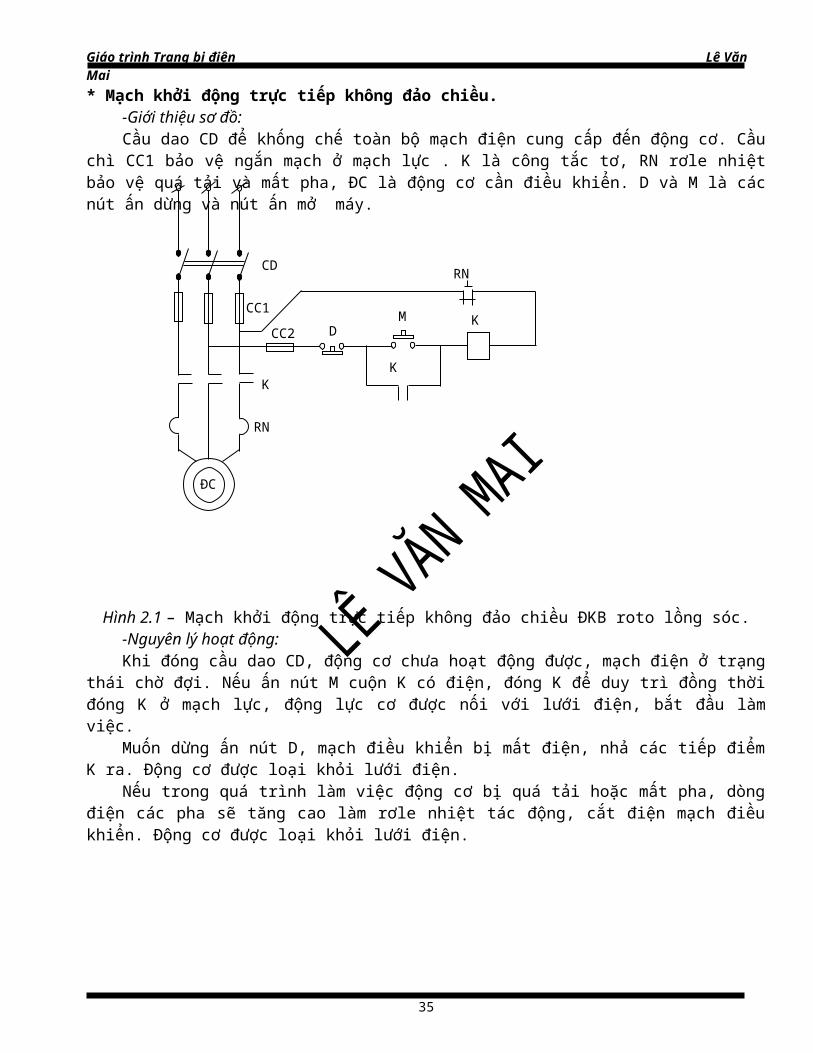
* Mạch khởi động trực tiếp không đảo chiều.-Giới thiệu sơ đồ: Cầu dao CD để khống chế toàn bộ mạch điện cung cấp đến động cơ. Cầu chì CC1 bảo vệ ngắn mạch
ở mạch lực . K là công tắc tơ, RN rơle nhiệt bảo vệ quá tải và mất pha, ĐC là động cơ cần điều khiển. D và M là các nút ấn dừng và nút ấn mở máy.
Hình 2.1 – Mạch khởi động trực tiếp không đảo chiều ĐKB roto lồng sóc.-Nguyên lý hoạt động: Khi đóng cầu dao CD, động cơ chưa hoạt động được, mạch điện ở trạng thái chờ đợi. Nếu ấn nút M
cuộn K có điện, đóng K để duy trì đồng thời đóng K ở mạch lực, động lực cơ được nối với lưới điện, bắt đầu làm việc.
Muốn dừng ấn nút D, mạch điều khiển bị mất điện, nhả các tiếp điểm K ra. Động cơ được loại khỏi lưới điện.
Nếu trong quá trình làm việc động cơ bị quá tải hoặc mất pha, dòng điện các pha sẽ tăng cao làm rơle nhiệt tác động, cắt điện mạch điều khiển. Động cơ được loại khỏi lưới điện.
* Mạch khởi động trực tiếp có đảo chiều:-Giới thiệu sơ đồ:
-CD: Cầu dao đóng ngắt mạch điện. -CC1, CC2: Các cầu chì bảo vệ ngắn mạch mạch động lực, mạch điều khiển. -D, MT, MN: Các nút dừng, mở thuận và mở ngựơc. -T, N: Các công tắc tơ khống chế chiều quay động cơ. -Đ : Động cơ KĐB ba pharôto lồng sóc. -RN: Rơle nhiệt bảo vệ quá tải cho động cơ.
26
CD
CC1
K
RN
ĐC
K
MD
K
RN
CC2
TDMT
N
RN
NT
MN
T
N
CC21 2 3 4 5
6 7 8
9 10CD
CC1
NT
RN
Đ
Giáo trình Trang bị điện Lê Văn Mai
Hình 2.2 – Mạch khởi động trực tiếp có đảo chiều ĐKB roto lồng sóc.
-Nguyên lý hoạt động: Đóng CD cấp điện cho mạch. Muốn động cơ quay theo chiều thuận ấn MT, công tắc tơ T có điện, đóng tiếp điểm T(3-4) tự duy trì, mở tiếp điểm T(7-8) tránh sự tác động đồng thời của công tắc tơ N. Đồng thời các tiếp điểm T ở mạch động lực đóng lại cấp điện cho động cơ Đ quay theo chiều thuận. Muốn động cơ quay theo chiều ngược ấn MN, công tắc tơ N có điện đóng tiếp điểm N(6-7) tự duy trì, mở tiếp điểm N(4-5) tránh sự tác động đồng thời của công tắc tơ T. Đồng thời các tiếp điểm N ở mạch động lực đóng lại cấp điện cho động cơ Đ quay theo chiều ngược lại. Muốn dừng động cơ, ấn nút D, công tắc tơ T (hoặc N) mất điện, động cơ được cắt ra khỏi nguồn và dừng tự do.
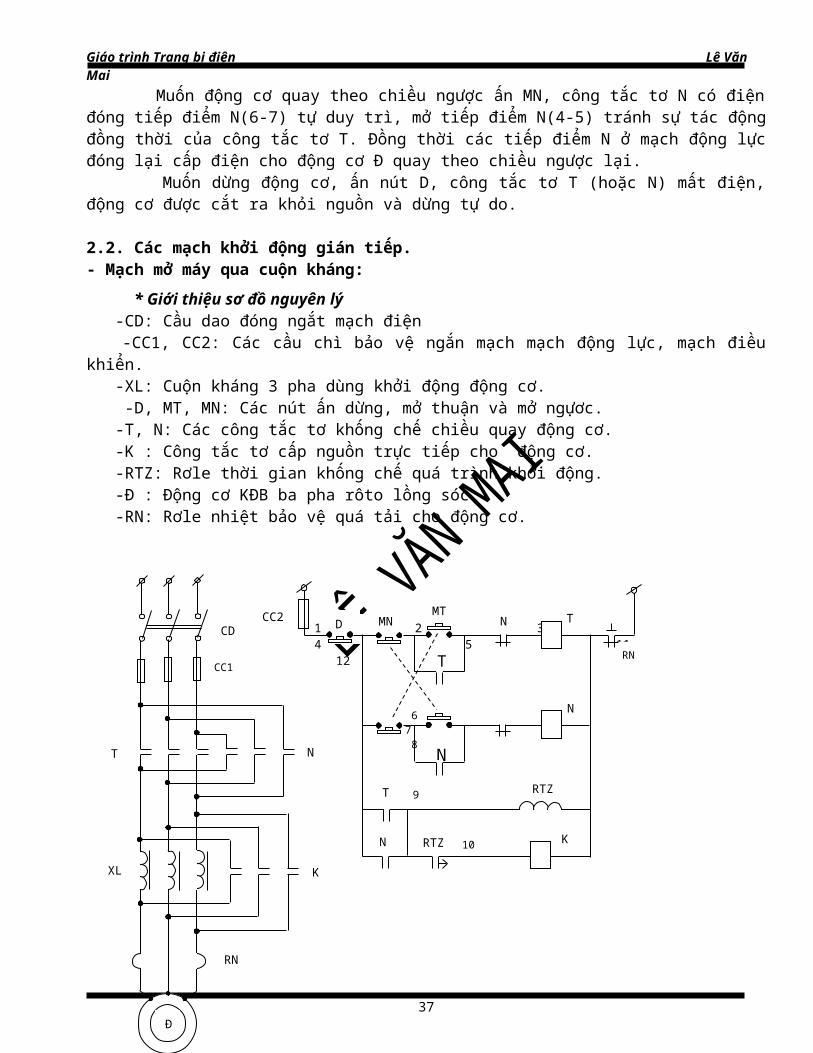
2.2. Các mạch khởi động gián tiếp.- Mạch mở máy qua cuộn kháng:
* Giới thiệu sơ đồ nguyên lý -CD: Cầu dao đóng ngắt mạch điện -CC1, CC2: Các cầu chì bảo vệ ngắn mạch mạch động lực, mạch điều khiển. -XL: Cuộn kháng 3 pha dùng khởi động động cơ. -D, MT, MN: Các nút ấn dừng, mở thuận và mở ngựơc. -T, N: Các công tắc tơ khống chế chiều quay động cơ. -K : Công tắc tơ cấp nguồn trực tiếp cho động cơ. -RTZ: Rơle thời gian khống chế quá trình khởi động. -Đ : Động cơ KĐB ba pha rôto lồng sóc. -RN: Rơle nhiệt bảo vệ quá tải cho động cơ.
27
1 2 3 4 5 11 12TD N
RN
NT
MN
T
N
CC2
6 7 8
9
MT
N
T RTZ
10RTZ K
K
RN
NT
CC1
CD
Đ
XL
Giáo trình Trang bị điện Lê Văn Mai
Hình 2.3 – Mạch khởi động ĐKB roto lồng sóc qua cuộn kháng.
* Nguyên lý hoạt động Cấp nguồn cho mạch động lực và mạch điều khiển. Muốn động cơ quay theo chiều thuận ấn MT,
công tắc tơ T có điện, đóng tiếp điểm T(3-4) tự duy trì, mở tiếp điểm T(7-8) tránh sự tác động đồng thời của công tắc tơ N. Tiếp điểm T(2-9) đóng lại cấp điện cho RTZ . Đồng thời các tiếp điểm T ở mạch động lực đóng lại, động cơ khởi động theo chiều thuận thông qua cuộn kháng( Umm < Uđm ). Sau thời gian chỉnh định của RTZ thì tiếp điểm thường mở đóng chậm RTZ đóng lại cấp nguồn cho công tắc tơ K. Công tắc tơ K có điện tác động đóng các tiếp điểm K ở mạch động lực đưa điện 3 pha trực tiếp vào động cơ. Động cơ tiếp tục tăng tốc và làm việc với Uđm. Muốn động cơ quay theo chiều ngược, ấn MN, công tắc tơ N có điện, động cơ được nối vào lưới với thứ tự đảo 2 pha. Quá trình khởi động tương tự như khi ta cho quay theo chiều thuận.
Muốn dừng động cơ, nhấn nút D, công tắc tơ T(hoặc N) và K mất điện, động cơ được cắt ra khỏi nguồn và dừng tự do.
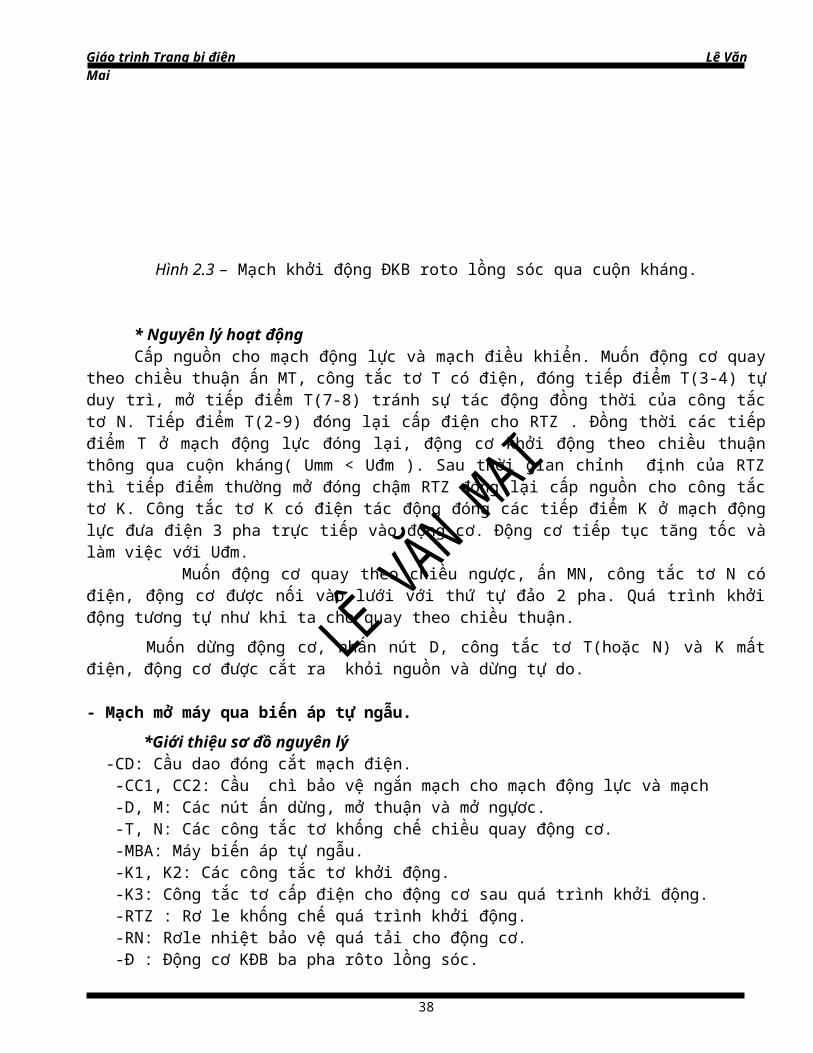
- Mạch mở máy qua biến áp tự ngẫu.
*Giới thiệu sơ đồ nguyên lý -CD: Cầu dao đóng cắt mạch điện. -CC1, CC2: Cầu chì bảo vệ ngắn mạch cho mạch động lực và mạch -D, M: Các nút ấn dừng, mở thuận và mở ngựơc. -T, N: Các công tắc tơ khống chế chiều quay động cơ. -MBA: Máy biến áp tự ngẫu. -K1, K2: Các công tắc tơ khởi động. -K3: Công tắc tơ cấp điện cho động cơ sau quá trình khởi động. -RTZ : Rơ le khống chế quá trình khởi động. -RN: Rơle nhiệt bảo vệ quá tải cho động cơ.
28
Giáo trình Trang bị điện Lê Văn Mai
-Đ : Động cơ KĐB ba pha rôto lồng sóc.
*Nguyên lý hoạt động Cấp nguồn cho mạch động lực và mạch điều khiển. Muốn động cơ làm việc ấn M, RTZ, K1, K2
có điện. Các tiếp điểm K1, K2 ở mạch động lực đóng lại, động cơ khởi động thông qua MBA tự
Hình 2.4 – Mạch khởi động ĐKB roto lồng sóc qua MBATN.
ngẫu ( Umm < Uđm ). Sau thời gian chỉnh định của RTZ thì tiếp điểm thường đóng mở chậm RTZ (3-4) mở ra, công tắc tơ K1, K2 mất điện, các tiếp điểm của chúng mở ra cắt điện MBA tự ngẫu. Đồng thời tiếp điểm thường mơ đóng chậm RTZ (3- 7) đóng lại cấp điện cho K3. K3 có điện đóng tiếp điểm K3 (2-7) lại để tự duy trì, mở tiếp điểm thường kín K3(4-5), K3(3-6) cắt điện RTZ và tránh sự có điện trở lại của K1, K2. Đồng thời các tiếp điểm K3 ở mạch động lực đóng lại đưa điện 3 pha trực tiếp vào động cơ. Động cơ tiếp tục tăng tốc và làm việc với Uđm.
Muốn dừng động cơ, nhấn nút D, K3 mất điện, động cơ được cắt ra khỏi nguồn và dừng tự do.
-Mạch mở máy bằng đổi nối Sao – Tam giác.
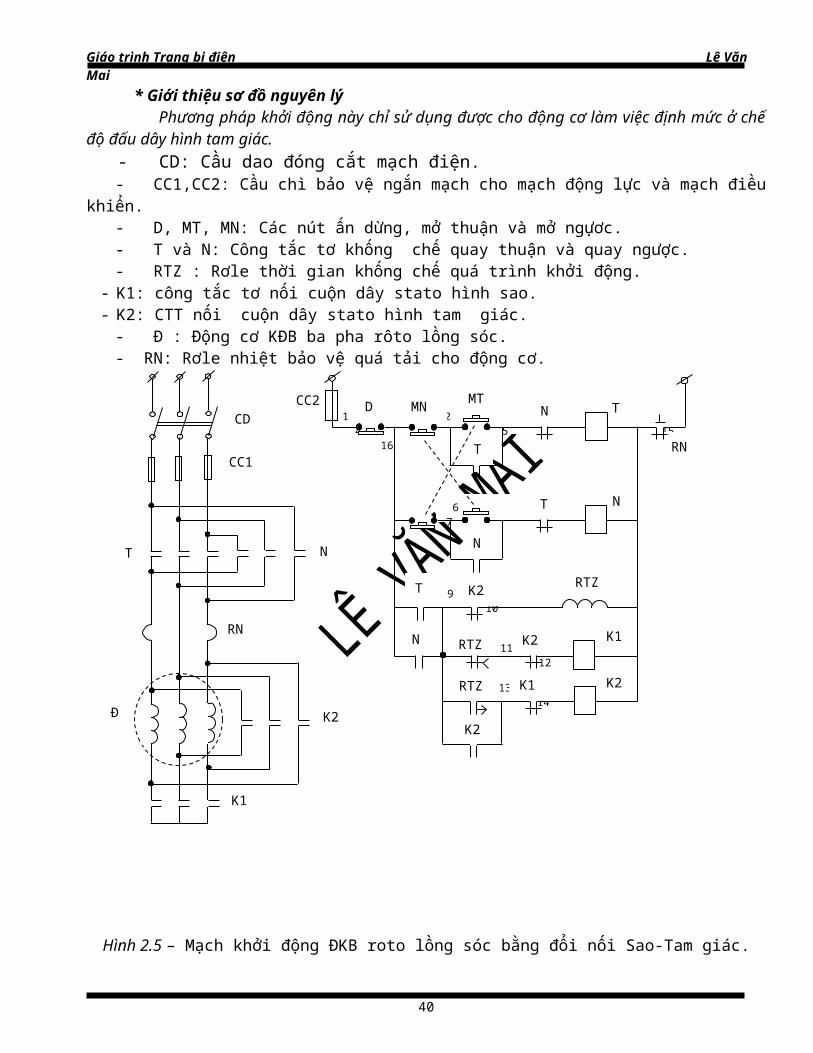
* Giới thiệu sơ đồ nguyên lý Phương pháp khởi động này chỉ sử dụng được cho động cơ làm việc định mức ở chế độ đấu dây hình tam giác. - CD: Cầu dao đóng cắt mạch điện. - CC1,CC2: Cầu chì bảo vệ ngắn mạch cho mạch động lực và mạch điều khiển. - D, MT, MN: Các nút ấn dừng, mở thuận và mở ngựơc. - T và N: Công tắc tơ khống chế quay thuận và quay ngược. - RTZ : Rơle thời gian khống chế quá trình khởi động.
- K1: công tắc tơ nối cuộn dây stato hình sao.- K2: CTT nối cuộn dây stato hình tam giác.
- Đ : Động cơ KĐB ba pha rôto lồng sóc.29
ĐK2
RN
K3
CC1
CD
MBA
K1
RTZ 7 K1 8 K2 9
6K3
CC2
K2
K3
K3
D
RN
RTZ
1 2 3 4 5 10 11M
RTZ
RTZ K1D K3
Giáo trình Trang bị điện Lê Văn Mai
- RN: Rơle nhiệt bảo vệ quá tải cho động cơ.
Hình 2.5 – Mạch khởi động ĐKB roto lồng sóc bằng đổi nối Sao-Tam giác.
* Nguyên lý hoạt động
Đóng CD cấp điện cho mạch. Muốn động cơ quay theo chiều thuận ấn MT, công tắc tơ T có điện, các tiếp điểm T (3-4) và T(2-9) đóng lại để tự duy trì và cấpđiện cho RTZ và K1. Các tiếp điểm T và K1 ở mạch động lực đóng lại, động cơ khởi động theo chiều thuận với cuộn dây stato được nối hình sao. Sau thời gian chỉnh định của RTZ, tiếp điểm thường kín mở chậm RTZ (9-11) mở ra, K1 mất điện mở các tiếp điểm K1 ở mạch động lực ra. Đồng thời tiếp điểm thường hở đóng chậm RTZ (9-13) đóng lại cấp điện cho công tắc tơ K2. K2 có điện đóng tiếp điểm K2 (9-13) lại để tự duy trì, mở tiếp điểm K2 (9-10) cắt điện RTZ, tiếp điểm K2 (11-12) mở ra tránh K1 tác động trở lại khi RTZ mất điện. Đồng thời các tiếp điểm K2 ở mạch động lực đóng lại, động cơ tiếp tục khởi động và làm việc với cuộn dây stato được đấu hình tam giác. Muốn động cơ quay theo chiều ngược, ấn MN, N có điện động cơ được nối vào lưới với thứ tự đảo 2 pha. Quá trình khởi động tương tự như khi ta cho quay theo chiều thuận.
Muốn dừng động cơ ấn D, T (hoặc N), K2 mất điện động cơ được cắt ra khỏi lưới và dừng tự do.
2.3 Các mạch hãm ĐKB
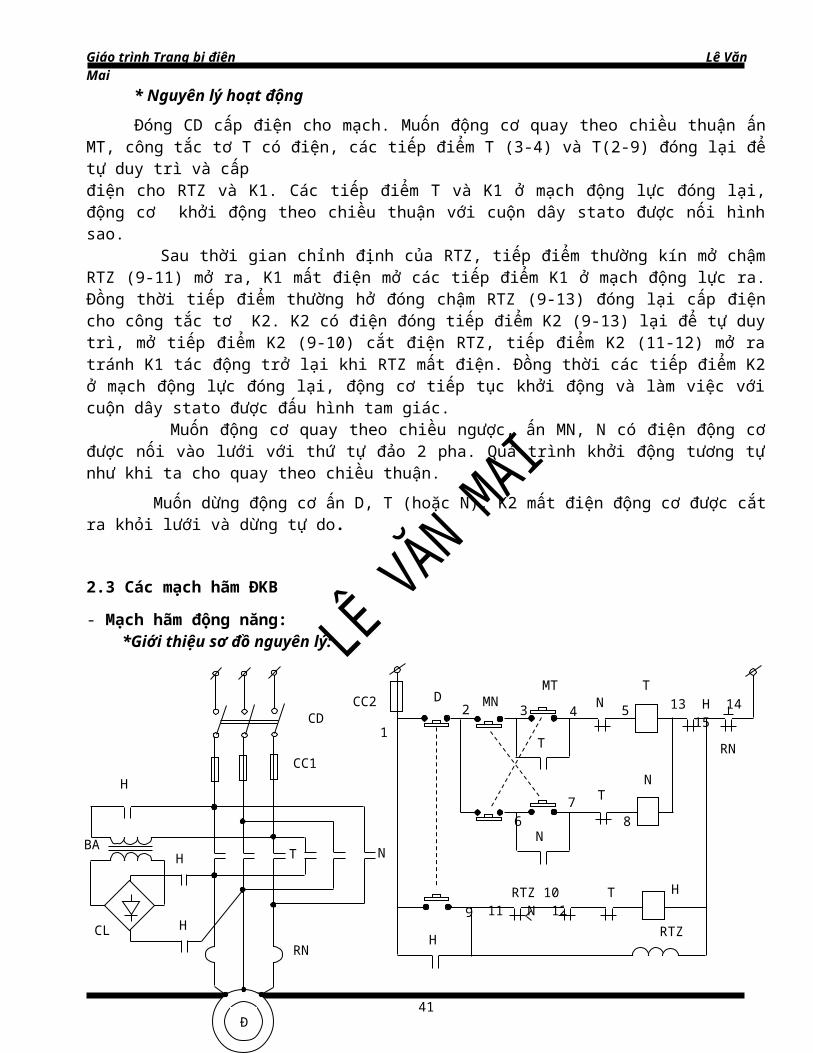
- Mạch hãm động năng:*Giới thiệu sơ đồ nguyên lý:
30
6 7 8
1 2 3 4 5 15 16
Đ
TD N
RN
NT
MN
T
N
CC2
9 10
MT
N
T RTZK2
11 12RTZ K2 K1
K2RTZ
K2
13 14
K1
K1
K2
RN
NT
CC1
CD
NBA
CL
TD N
RN
NT
MN
T
N
CC2
1
2 3 4 5
6
7 8
9
MT
H
13 H 14 15
RTZ
RTZ 10 T 11 N 12 H
CC1
CD
H
H
H
T
RN
Đ

Giáo trình Trang bị điện Lê Văn Mai
Hình 2.6 – Mạch hãm động năng ĐKB roto lồng sóc. - CD: Cầu dao đóng cắt mạch điện. - CC1,CC2: Cầu chì bảo vệ ngắn mạch cho mạch động lực và mạch điều khiển. -MT, MN : Nút ấn mở máy thuận, mở máy ngược. -D : Nút ấn dừng hãm. -T và N: Công tắc tơ khống chế quay thuận và quay ngược. - H và RTZ: Công tắc tơ và rơle thời gian khống chế quá trình hãm. - BA và CL : Máy biến áp và bộ chỉnh lưu cấp nguồn một chiều cho quá trình hãm động năng. -Đ : Động cơ KĐB ba pharôto lồng sóc. -RN: Rơle nhiệt bảo vệ quá tải cho động cơ.
Hãm động năng động cơ KĐB ba pha xảy ra khi động cơ đang quay, ta cắt nguồn điện ba pha và cấp vào stato nguồn điện một chiều.
Dòng điện một chiều sinh ra từ trường đứng yên so với stato. Rô to vẫn quay theo chiều cũ nên xuất hiện trong nó sức điện động cảm ứng E2 . Vì rôto kín mạch nên nên E2 sinh ra dòng điện I2 . Tương tác giữa dòng điện I2 và từ trường đứng yên tạo ra mômen hãm có chiều ngược với chiều quay rôto làm rôto quay chậm lại.
*Nguyên lý hoạt động Cấp điện cho mạch, nhấn nút MT (hoặc MN), công tắc tơ T( hoặcN) có điện, động cơ được nối nguồn 3 pha và làm việc theo chiều thuận (hoặc ngược). Muốn dừng, nhấn nút D, công tắc tơ T( hoặc N) mất điện, động cơ được cắt ra khỏi nguồn 3 pha. Đồng thời công tắc tơ H và rơle RTZ có điện, đóng tiếp điểm H(1-9) tự duy trì, các tiếp điểm H ở mạch động lực đóng lại cấp nguồn một chiều vào động cơ, động cơ thực hiện quá trình hãm động năng. Quá trình hãm động năng kết thúc khi tiếp điểm RTZ( 9-10 ) mở ra, công tắc tơ H và rơle RTZ mất điện, động cơ được cắt ra khỏi nguồn một chiều. - Mạch điện hãm ngược.
*Giới thiệu sơ đồ nguyên lý
- Đ: Động cơ KĐB ba pha rôto lồng sóc. - CD: Cầu dao đóng cắt mạch điện.
31
Giáo trình Trang bị điện Lê Văn Mai
- CC1,CC2: Cầu chì bảo vệ ngắn mạch cho mạch động lực và mạch điều khiển. - T và N: Các công tắc tơ khống chế quay thuận và quay ngược. - RKT và H: Rơle kiểm tra tốc độ và công tắc tơ khống chế quá trình hãm
-RN : Rơle nhiệt bảo vệ quá tải cho động cơ .Hãm ngược động cơ KĐB ba pha xảy ra khi rôto động cơ quay ngược chiều với từ trường quay.
*Nguyên lý hoạt độngĐóng CD cấp điện cho mạch. Muốn động quay theo chiều thuận ấn MT, công tắc tơ T có
điện ,tiếp điểm T(3-4) đóng lại để tự duy trì đồng thời đóng các tiếp điểm T ở mạch động lực cấp điện cho động cơ quay theo chiều thuận. Quá trình xảy ra tương tự khi ta ấn MN, công tắc tơ N có điện , động cơ được đóng vào lưới với thứ tự đảo 2 pha, động cơ quay theo chiều ngược.
Quá trình hãm : Xảy ra khi ấn nút D. Tuỳ thuộc vào chiều quay trước đó của động cơ mà tiếp điểm của rơle kiểm tra tốc độ RKT1 hoặc RKT2 đóng. Nếu động cơ quay theo chiều thuận thì RKT1 đóng, nếu động cơ quay theo chiều ngược thì RKT2 đóng. Giả sử trước đó động cơ quay theo chiều thuận, khi ấn D, công tắc tơ H có điện, tiếp điểm H(10-11) đóng lại tự duy trì, tiếp điểm H(1-2) mở ra, công tắc tơ T mất điện cắt động cơ ra khỏi lưới. Đồng thời tiếp điểm H (1-6) đóng lại cấp điện cho công tắc tơ N, khi công tắc tơ N có điện đóng trực tiếp động cơ vào lưới theo thứ tự đảo 2 pha. Động cơ tiến hành hãm ngược. Quá trình hãm ngược kết thúc khi tốc độ của động cơ giảm đến giá trị nhả của RKT, tiếp điểm RKT1
Hình 2.7 – Mạch hãm ngược ĐKB roto lồng sóc.mở ra, công tắc tơ N mất điện cắt động cơ ra khỏi lưới, đồng thời công tắc tơ H mất điện do tiếp điểm N (1-10) mở ra.
2.4 Mạch điều khiển ĐKB ba pha hai cấp tốc độ
*Giới thiệu sơ đồ nguyên lý
32
CD
CC1
NT
RN
Đ
RKT2
RKT1
T
D
N
RN
NT
MN
T
N
CC2
12 3 4 5
6
7 8 9
10
MT
H
T
N 11
H
H
12 13H
Giáo trình Trang bị điện Lê Văn Mai
- CD: Cầu dao đóng ngắt mạch điện. -CC1,CC2: Cầu chì bảo vệ ngắn mạch cho mạch động lực và mạch điều khiển. -D, MT, MN: Các nút dừng, mở thuận và mở ngựơc. -M, MYY : Các nút nhấn chọn tốc độ cho động cơ. - T và N: Các công tắc tơ khống chế quay thuận và quay ngược. -K1: Công tắc tơ nối cuộn dây Stato động cơ hình tam giác -K2, K3: Công tắc tơ nối cuộn dây Stato động cơ hình sao kép. -RTr: Rơle trung gian đảm bảo trình tự chọn tốc độ trước khi chọn chiều quay ở thời điểm ban đầu.
-RTZ và H: Rơle và công tắc tơ khống chế quá trình hãm động năng. - BA và CL : Máy biến áp và bộ chỉnh lưu cấp nguồn một chiều cho quá trình hãm động năng. - RN : Rơle nhiệt bảo vệ quá tải cho động cơ. - Đ: Động cơ KĐB ba pha hai cấp tốc độ.
33
BA
CL
RN
22
K1
K3
N
K2
K1 H RTZ
15 16 K1 17 K
2
MY
Y 11 M 12 K
2 13 K3 14 K
1
T
7 8 RTr 9 T 10 N
CC
2 1 D 2 M
N 3 4 RTr 5 N
6 T 23 24
K2 21 K
3 RTr
18 RTZ 19 RTr 20 H
MT
K3 K
3
CC
1
RN
K1 K
2
CD
N
H
T
HH
Ñ
Hình 2.8 – M
ạch điều khiển ĐK
B ba pha hai cấp tốc độ
Giáo trình Trang bị điện Lê Văn Mai
*Nguyên lý hoạt động
Đóng CD cấp nguồn cho mạch. Chọn tốc độ bằng các nút ấn M hoặc MYY. Công tắc tơ K1 hoặc K2 và K3 có điện tác động nối bộ dây quấn stato theo hình tam giác (tốc độ thấp) hoặc hình sao kép (tốc độ cao). Đồng thời đóng tiếp điểm K1(1-22) hoặc K2, K3 (1-21-22) cấp điện cho RTr để chuẩn bị chọn chiều quay. Chọn chiều quay bằng các nút nhấn MT hoặc MN. Công tắc tơ T hoặc N có điện tác động cấp điện cho động cơ khởi động và làm việc theo tốc độ và chiều quay đã chọn.
Muốn dừng động cơ ấn nút D, công tắc tơ T hoặc N, K1 hoặc K2, K3 và RTr mất điện. H, RTZ có điện, các tiếp điểm H đóng lại, dòng điện một chiều được đưa vào cuộn dây Stato động cơ hình tam giác, động cơ tiến hành hãm động năng. Quá trình hãm kết thúc khi tiếp điểm RTZ mở ra, công tắc tơ H, RTZ mất điện, động cơ được cắt ra khỏi nguồn một chiều .
3. Tự động khống chế ĐKB roto dây quấn.3.1. Mạch mở máy ĐKB roto dây quấn qua 2 cấp điện trở phụ theo nguyên tắc thời gian.
*Giới thiệu sơ đồ nguyên lý - CD: Cầu dao đóng cắt mạch điện. -CC1,CC2: Cầu chì bảo vệ ngắn mạch cho mạch động lực và mạch điều khiển. - D, MT, MN: Các nút ấn dừng, mở thuận và mở ngựơc. - T và N: Công tắc tơ khống chế quay thuận, quay ngược. - 1 RTZ, 2RTZ, K1, K2: Các rơle và công tắc tơ khống chế quá trình khởi động. - 3RTZ và H: Rơle thời gian và công tắc tơ khống chế quá trình hãm động năng. - R1, R2: Các điện trở khởi động. - BA và CL : Máy biến áp và bộ chỉnh lưu cấp nguồn một chiều cho quá trình hãm động năng. - RN : Rơle nhiệt bảo vệ quá tải cho động cơ. - Đ: Động cơ KĐB 3 pha rôto dây quấn.
* Nguyên lý hoạt động
Đóng CD cấp điện cho mạch. Muốn động quay theo chiều thuận ấn MT, công tắc tơ T có điện ,tiếp điểm T(3-4) đóng lại để tự duy trì , tiếp điểm T(2-9) đóng lại cấp điện cho 1RTZ , đồng thời đóng các tiếp điểm T ở mạch động lực cấp điện cho động cơ khởi động quay theo chiều thuận với 2 điện trở phụ R1, R2 trong mạch rôto. Sau thời gian chỉnh định của 1RTZ tiếp điểm 1 RTZ (9-11) đóng lại cấp điện cho công tắc tơ K1, tiếp điểm K1 (9-12) đóng cấp điện cho 2RTZ .Đồng thời các tiếp điểm K1 ở mạch động lực đóng lại thực hiện ngắn mạch điện trở R1, động cơ tiếp tục khởi động với điện trở R2 nối trong mạch rôto.
Sau thời gian chỉnh định của 2RTZ, tiếp điểm 2RTZ (9-13) đóng cấp điện cho công tắc tơ K2, tiếp điểm K2 (9-13) đóng lại để tự duy trì , tiếp điểm K2(9-10) mở ra làm cho 1RTZ , K1, 2RTZ mất điện.
34
BACL
2RTZ 13 K2
K1 12 2RTZ
N 1RTZ 11 K
1
N
6 7 T 8 N
1 D 2 M
N 3 4 N
5 18 H 19 20
H
T
RN
CC
2M
T
T 9 K2 10 1RTZ
14 3RTZ 15 T 16 N 17 H
3RTZ
TK2
Đ
K1 K
1
R2
RN
R1
K2 K
2
CD
NH
T
H
H
CC
1
Giáo trình Trang bị điện Lê Văn Mai
Hình 2.9 – Mạch mở máy ĐKB roto dây quấn qua 2 cấp điện trở phụ theo nguyên tắc thời gian.
Đồng thời các tiếp điểm K2 trong mạch động lực đóng lại loại bỏ toàn bộ 2 cấp điện trở phụ trong mạch rôto. Động cơ tăng tốc và làm việc với tốc độ định mức.
Muốn động cơ quay theo chiều ngược, ấn MN, công tắc tơ N có điện, động cơ được nối vào lưới với thứ tự đảo 2 pha. Quá trình khởi động tương tự như khi ta cho quay theo chiều thuận.
Muốn dừng động cơ ấn D, công tắc tơ T ( hoặc N), K2 mất điện động cơ được cắt ra khỏi lưới. Đồng thời công tắc tơ H, 3RTZ có điện, tiếp điểm H (1-14) đóng lại tự duy trì, các tiếp điểm H ở mạch động lực đóng lại, dòng điện một chiều được đưa vào cuộn dây stato động cơ, động cơ tiến hành hãm động năng. Quá trình hãm động năng kết thúc khi tiếp điểm 3RTZ (14-15) mở ra, công tắc tơ H, 3RTZ mất điện, động cơ được cắt ra khỏi nguồn một chiều.
3.2. Mạch mở máy ĐKB roto dây quấn qua 2 cấp điện trở phụ theo nguyên tắc dòng điện.
*Giới thiệu sơ đồ:
-Đ : Động cơ KĐB ba pha rôto dây quấn.35

Giáo trình Trang bị điện Lê Văn Mai
-RI1, RI2 : Các rơle dòng điện ( RI2 có giá trị nhả nhỏ hơn RI1). -K1, K2: Các công tắc tơ khởi động. -K: Công tắc tơ chính. -R1,R2: Các điện trở phụ khởi động. -RTr: Rơle trung gian.
Hình 2.10 – Mạch mở máy ĐKB roto dây quấn qua 2 cấp điện trở phụ theo nguyên tắc dòng điện.
*Nguyên lý làm việc:
Để khởi động động cơ, ta ấn nút C, công tắc tơ K có điện, động cơ được đấu vào lưới điện. Tiếp điểm K(3- 4) đóng cấp điện cho rơ le RTr làm việc , tiếp điểm RTr(2-5) đóng chuẩn bị mạch làm việc cho K1 và K2 . Nhưng vì ban đầu dòng điện khởi động của động cơ lớn nên rơ le dòng điện RI1 (và RI2) tác động mở tiếp điểm thường đóng RI1(5-6) ra nên K1 không có điện. Động cơ được khởi động qua hai cấp điện trở phụ R1, R2. Tốc độ của động cơ dần tăng lên, dòng điện trong động cơ dần giảm xuống. Khi giảm đến giá trị nhả của RI1 thì tiếp điểm RI1(5-6) đóng lại cấp điện cho K1 đóng các tiếp điểm K1 ở mạch động lực làm ngắn mạch điện trở R1. Sau đó dòng điện trong rôto động cơ lại tăng lên, RI2 tiếp tục tác động, tiếp điểm RI2(6-7) mở làm cho K2 không có điện. Động cơ tiếp tục khởi động và tăng tốc với R2. Khi dòng điện trong rôto giảm đến giá trị nhả của RI2 thì tiếp điểm RI2(6-7) đóng lại cấp điện cho K2, đóng các tiếp điểm K2 ở mạch động lực loại bỏ điện trở R2 ra khỏi mạch rôto. Động cơ tiếp tục tăng tốc đến tốc độ định mức.
Rơle trung gian RTr có tác dụng bảo đảm không cho K, K1, K2 có điện cùng đồng thời để cho RI1 kịp mở tiếp điểm RI1(5-6) không cho K1, K2 có điện khi ta ấn nút M. Nếu không có RTr thì khi K có điện , K1 và K2 có điện ngay và lập tức R1, R2 cũng bị loại khỏi mạch rôto.
4. Tự động khống chế động cơ điện một chiều
4.1. Mạch mở máy ĐC – DC qua hai cấp điện trở phụ theo nguyên tắc thời gian.
*Giới thiệu sơ đồ:36
6
81 2
4
5
3
7
KCD
K K RTr
K1
K2
K2
K1
RTr
RI1
RI2
RI1
RI2
R1
R2K2
K1
K
Đ
Giáo trình Trang bị điện Lê Văn Mai
-Đ : Động cơ một chiều kích từ song song. -r1 , r2 : Các điện trở phụ khởi động. -K1 , K2 : Các công tắc tơ khởi động. -RTZ1 , RTZ 2 : Các rơle thời gian khống chế quá trình khởi động. -K : Công tắc tơ chính.
*Nguyên lý làm việc:
Đóng điện vào mạch phần ứng và mạch điều khiển. Tại thời điểm ban đầu, cuộn kích từ CKT có điện, rơle RTZ1 có điện , tiếp điểm RTZ1 mở ,công tắc tơ K1, K2 không có điện. Ấn C, công tắc tơ K có điện, mạch phần ứng động cơ được cấp điện nối với r1 ,r2 . Động cơ khởi động qua hai cấp điện trở . Tiếp điểm thường kín K mở ra, RTZ1 mất điện. Khi có dòng điện chạy qua r1 tạo nên sụt áp cấp điện cho RTZ2, RTZ2 có điện mở tiếp điểm thường kín của nó trong mạch K2 . Sau thời gian chỉnh định của RTZ1 (thời gian t1) tốc độ động cơ đạt giá trị n1 thì tiếp điểm thường kín của RTZ1 đóng lại cấp điện cho K1 làm ngắn mạch điện trở r1. Động cơ tiếp tục khởi động với điện trở phụ r2 trong mạch phần ứng. Do r1 ngắn mạch nên RTZ2 mất điện. Sau thời gian chỉnh định của RTZ2 (thời gian t2) tương ứng tốc độ động cơ đạt giá trị n2. Tiếp điểm thường kín của RTZ2 đóng lại cấp điện cho K2 , K2 có điện làm ngắn mạch điện trở r2. Động cơ chuyển sang làm việc với Rf = 0 . Tốc độ động cơ tăng tốc đến tốc độ cơ bản.
Hình 2.11 - Mạch mở máy ĐC – DC qua hai cấp điện trở phụ theo nguyên tắc thời gian.4.2. Mạch hãm động năng theo nguyên tắc thời gian.
*Giới thiệu sơ đồ:
-Đ : Động cơ một chiều kích từ song song.
37
RTZ2
+
K1
KD C
CKT
r2 r1
K2 K1
K
K
KRTZ1
K2
RTZ1
Đ
RTZ2
Giáo trình Trang bị điện Lê Văn Mai
-r1 , r2 : Các điện trở phụ khởi động . -rh : Điện trở hãm động năng. -RTZ và công tăc tơ H để khống chế quá trình hãm. - K : Công tắc tơ chính.
*Nguyên lý làm việc:
Sơ đồ đảm bảo không cho rh tham gia vào quá trình khởi động, rh phải được cắt ra trước khi khởi động lần sau.
Ấn C, công tắc tơ K có điện, mạch phần ứng động cơ được cấp điện nối với r1 ,r2 . Động cơ khởi động qua hai cấp điện trở theo nguyên tắc thời gian ( phần điều khiển không vẽ trong sơ đồ).
Hình 2.12 - Mạch hãm động năng ĐC – DC theo nguyên tắc thời gian.
Khi động cơ khởi động và làm việc, rơle RTZ có điện, tiếp điểm của nó đóng lại để chuẩn bị cho mạch hãm, còn tiếp điểm thường kín K mở ra. Do vậy công tăc tơ H không thể có điện, điện trở r h không thể tham gia vào quá trình khởi động và làm việc.
Để hãm dừng động cơ, ấn D, công tắc tơ K mất điện, tiếp điểm thường hở của nó mở ra làm RTZ mất điện, tiếp điểm thường kín K đóng lại do vậy công tắc tơ H có điện đóng tiếp điểm của nó để đưa rh
vào mạch phần ứng động cơ, động cơ chuyển sang chế độ hãm động năng. Quá trình hãm kết thúc khi tiếp điểm RTZ mở ra, công tắc tơ H mất điện cắt rh ra khỏi phần ứng động cơ.
4.3 Mở máy ĐC- DC theo nguyên tắc tốc độ.
*Giới thiệu sơ đồ:
Các rơle RH và K1 được mắc song song với phần ứng động cơ. Điện áp đặt lên chúng chính là sức điện động của động cơ. K và H là công tắc tơ khởi động và hãm. Đ là động cơ một chiều kích từ song song ( phần kích từ không thể hiện trên sơ đồ).
38
_+
H
KD C
CKT
H
r2 r1
Đ
K2 K1
K
rh
K
K
RTZ
KRTZ
Giáo trình Trang bị điện Lê Văn Mai
*Nguyên lý làm việc:
-Đóng điện vào mạch, ấn nút C, công tắc tơ K có điện động cơ được nối vào nguồn và khởi động với rf. Lúc này sức điện động của động cơ còn nhỏ ( do tốc độ động cơ nhỏ ) điện áp đặt lên K1 nhỏ không đủ để nó tác động. Rơle RH không có điện do tiếp điểm thường kín K mở ra. Khi tốc độ động cơ bằng n1 (E = Kn1 bằng điện áp hút của K1 ) K1 tác động làm điện trở R bị ngắn mạch do đó động cơ chuyển sang làm việc ở đường đặc tính tự nhiên.-Để hãm dừng động cơ, ấn nút D, K mất điện ,động cơ được cắt ra khỏi lưới. Đồng thời tiếp điểm thường kín K đóng lại, RH được mắc vào mạch phần ứng. Lúc này do tốc độ của động cơ đang lớn nên sức điện động lớn, RH tác động đóng tiếp điểm RH cấp điện cho H , điện trở rH được mắc vào mạch phần ứng động cơ, động cơ tiến hành hãm động năng. Đến một thời điểm nào đó thì tốc độ động cơ giảm đến giá trị nhả của RH, H mất điện loại rH ra khỏi mạch phần ứng . Quá trình hãm động năng kết thúc.
Hình 2.13 - Mở máy ĐC- DC theo nguyên tắc tốc độ.
5. Vấn đề bảo vệ và liên động trong TĐKC- TĐĐ
*Ý nghĩa:
- Đảm bảo an toàn cho người và thiết bị trong quá trình làm việc.-Hạn chế đến mức tối đa sự xuất hiện các chế độ làm việc xấu và sự cố nếu xuất hiện thì hạn chế
tối thiểu tác hại của nó.
39
+
H
RH
D
rf
RH
K
rH
K1
K
C
K1
K
K
H
Đ
_
Giáo trình Trang bị điện Lê Văn Mai
- Hệ thống tín hiệu nhằm giúp nhân viên vận hành nhanh chóng phát hiện sự cố để loại trừ khi cần thiết, chỉ cho nhân viên sữa chữa vùng xảy ra sự cố để khắc phục nhanh chóng.
Các chế độ làm việc xấu và sự cố:+ Quá tải: hiện tượng tăng dòng điện trong động cơ dẫn đến nhiệt độ trong động cơ vượt quá mức
cho phép dẫn đến giảm tuổi thọ động cơ.- Quá tải công nghệ: do lực cơ học sinh ra trong quá trình gia công sản phẩm.- Quá tải do điện áp giảm thấp.- Quá tải do lệch pha.- Quá tải do mất pha.+ Ngắn mạch: dòng điện ngắn mạch tăng rất lớn gây ra nhiệt độ và lực điện động lớn gây tác hại
lớn, vì vậy khi xuất hiện ngắn mạch thì phải loại trừ ngay.
* Bảo vệ ngắn mạch:
Trong hệ thống TĐKC – TĐĐ bất kỳ là ngắn mạch một pha hoặc ba pha đều nguy hiểm và bảo vệ phải tác động cắt nhanh hệ thống ra khỏi nguồn điện.
Bảo vệ ngắn mạch có thể thực hiện bằng : cầu chì, rơle dòng cực đại tác động nhanh, áptomát.+ Cầu chì: - Kết cấu đơn giản, rẻ tiền, dễ mua sắm, lắp đặt và tác động tương đối tin cậy.- Độ chính xác khi tác động phụ thuộc vào thời gian làm việc của dây chảy.- Tác động riêng lẻ từng pha, dễ xảy ra sự cố tiếp theo.Ngoài ra khi cầu chì chảy cần có một khoảng thời gian tương đối lâu để thay thế. Vì vậy cầu chì
được dùng để bảo vệ những thiết bị không quan trọng.+ Aptomát và rơle dòng điện: tác động rất tin cậy, khi cắt thì cắt cả ba pha. Tuy nhiên chúng có
kết cấu phức tạp và giá thành cao.Riêng đối với bảo vệ ngắn mạch bằng rơle dòng cực đại, tác động cắt xảy ra thông qua mạch điều
khiển. Loại bảo vệ này cần đặt rơle trên hai pha cho động cơ xoay chiều và trên một cực của động cơ một chiều.
Dòng điện chỉnh định của rơle : Icđ = 1,3 Ikđ
* Bảo vệ quá tải lâu dài:
Quá tải lâu dài vượt trị số cho phép sẽ gây phát nóng làm nhiệt độ của dây quấn máy điện vượt quá trị số cho phép đối với cách điện của nó, sẽ dẫn đến cháy máy điện. Để bảo vệ máy điện có thể dùng loại áptomát có cơ cấu nhiệt hoặc dùng rơle nhiệt. Rơle không nhạy đối với các quá tải ngắn hạn và khởi động vì phần tử thụ cảm nhiệt của chúng có quán tính nhiệt. Vì có quán tính nhiệt nên chúng không bảo vệ được ngắn mạch.
Phần tử đốt nóng của rơle nhiệt thường được mắc trên hai pha của hệ thống ba pha và trên một hoặc hai cực của động cơ điện một chiều.
* Bảo vệ quá tải ngắn hạn xung kích:
Những quá tải tạm thời, nhưng dòng điện xung kích lớn có thể gây nên lực điện động lớn làm hư hỏng các bộ phận của máy điện như cháy cổ góp hoặc bối dây, làm hỏng các bộ phận cơ khí có liên quan khác. Vì vậy cần phải cắt động cơ ra khỏi lưới.
Để bảo vệ cắt trong trường hợp này người ta dùng rơle dòng điện cực đại hay áptomát có cơ cấu cắt nhanh.
* Bảo vệ cực tiểu, bảo vệ không:
Khi điện áp lưới bị mất hoặc giảm thấp dưới trị số cho phép thì phải cắt mối liên hệ giữa nguồn điện và động cơ. Để tránh động cơ tự khởi động khi điện áp lưới phục hồi người ta dùng bảo vệ cực tiểu và bảo vệ không.
40
Giáo trình Trang bị điện Lê Văn Mai
- Bảo vệ không là bảo vệ hệ thống tự động khởi động trở lại khi điện áp phục hồi sau mỗi lần mất điện.
- Bảo vệ cực tiểu là bảo vệ tránh cho hệ thống làm việc khi điện áp lưới giảm quá mức tối thiểu.Trong thực tế người ta thường hay phối hợp hai dạng bảo vệ này với nhau và với các dạng bảo vệ khác.
Hình 2.14 - Bảo vệ cực tiểu, bảo vệ không.
* Bảo vệ mất từ trường:
Khi động cơ điện một chiều kích từ độc lập đang làm việc, nếu dòng điện kích từ giảm nhỏ quá trị số cho phép thì tốc độ động cơ tăng lên quá mức làm hư hỏng động cơ và các thiết bị cơ điện khác. Do vậy phải có bảo vệ cắt mạch phần ứng khỏi nguồn cung cấp khi có sự cố giảm hoặc mất từ trường.
Hình 2.15 - Bảo vệ mất từ trường.
* Các khâu liên động làm chức năng bảo vệ:
Bảo đảm sự làm việc an toàn cho thiết bị.Bảo đảm trình tự tác động nghiêm ngặt giữa các thiết bị trong hệ thống tránh thao tác nhầm.Ví dụ 1: Khâu liên động bằng cơ và điện tránh ngắn mạch hai pha dùng trong mạch điều khiển đảo
thứ tự pha.Công tắc tơ T và N làm nhiệm vụ đóng nguồn điện theo thứ tự pha thuận (T) và nghịch (N). Nếu
các côngtắctơ này làm việc đồng thì sẽ xảy ra trường hợp ngắn mạch hai pha. Vì vậy cần phải dùng các khoá liên động để tránh khả năng đó.
41
RNRA
RA
Đến mạch điều khiểnRA
MD RN
RA
Đến mạch điều khiển
CKTRTT
RTT RNRA
RA
Đến mạch điều khiển
NT
1 D 2 3 MT 4 N 5T
6 MN 7 T 8N
T
N
Đến động cơ
Giáo trình Trang bị điện Lê Văn Mai
Hình 2.16 – Mạch liên động bảo vệ tránh ngắn mạch khi đảo pha.
Khoá liên động về cơ khí ở đây ta dùng nút ấn kép. Trong mạch mở máy thuận gài tiếp điểm thường kín của nút ấn mở ngược và ngược lại.
Khoá liên động về điện là các tiếp điểm thường kín N(4- 5) gửi trong mạch côngtắctơ T và T(7- 8) gửi trong mạch côngtắctơ N.
Bài 3: Trang bị điện máy công nghiệp1. Trang bị điện cho máy cắt gọt kim loại.1.1 Khái niệm chung về máy cắt gọt kim loại.
Máy cắt kim loại được dùng để gia công các chi tiết kim loại bằng cách cắt bớt các lớp kim loại thừa, để sau khi gia công có hình dáng gần đúng yêu cầu (gia công thô) hoặc thoả mãn hoàn toàn yêu cầu đặt hàng với độ chính xác nhất định về kích thước và độ bóng cần thiết của bề mặt gia công (gia công tinh).
Các yêu cầu chính và những đặc điểm công nghệ đặc trưng của trang bị điện và 42

Giáo trình Trang bị điện Lê Văn Mai
tự động hoá các máy cắt kim loại Máy cắt kim loại theo số lượng và chủng loại chiếm vị trí hàng đầu trong tất cả các máy công nghiệp.
*Phân loại máy cắt kim loại Máy cắt kim loại gồm nhiều chủng loại và rất đa dạng trong từng nhóm máy, nhưng có thể phân loại
chúng dựa trên các đặc điểm sau:
- Tùy thuộc vào quá trình công nghệ đặc trưng bởi phương pháp gia công, dạng dao , đăc tính chuyển động v.v…, các máy cắt được chia thành các máy cơ bản: tiện, phay; bào, khoan - doa, mài và các nhóm máy khác như gia công răng, ren vít v.v…
- Theo đặc điểm của quá trình sản xuất, có thể chia thành các máy vạn năng, chuyên dùng và đặc biệt. Máy vạn năng là các máy có thể thực hiện được các phương pháp gia công khác nhau như tiện, khoan, gia công răng v.v… để gia công các chi tiết khác nhau về hình dạng và kích thước. Các máy chuyên dùng là các máy để gian công các chi tiết có cùng hình dáng nhưng có kích thước khác nhau. Máy đặc biệt là các máy chỉ thực hiện gia công các chi tiết có cùng hình dáng và kích thước.
- Theo kích thước và trọng lượng chi tiết gia công trên máy, có thể chia maý cắt kim loại thành các máy bình thường (<10.000kG), các máy cỡ lớn (<30.000kG), các máy cỡ nặng (<100.000kG) và các máy rất nặng (>100.000kG) - Theo độ chính xác gia công, có thể chia thành máy có độ chính xác bình thường, cao và rất cao.
* Các chuyển động và các dạng gia công điển hình trên MCKL Trên MCKL, có hai loại chuyển động chủ yếu: chuyển động cơ bản và chuyển động phụ Chuyển động cơ bản là chuyển động tương đối của dao cắt so với phôi để đảm bảo quá trình cắt gọt.
Chuyển động này chia ra: chuyển đông chính và chuyển động ăn dao - Chuyển động chính (chuyển động làm việc) là chuyển động thực hiện quá trình cắt gọt kim loại bằng dao
cắt. - Chuyển động ăn dao là các chuyển động xê dịch của dao hoặc phôi để tạo ra một lớp phôi mới. Chuyển động phụ là những chuyển động không liên quan trực tiếp đến quá trình cắt gọt, chúng cần thiết
khi chuẩn bị gia công, nâng cao hiệu suất và chất lương gia công, hiệu chỉnh máy v.v… Ví dụ như di chuyển nhanh bàn hoặc phôi trong máy tiện, nới siết xà trên trụ trong máy khoan cần, nâng hạ xà trong dao trong máy bào giường, bơm dầu của hệ thống bôi trơn, bơm nước làm mát v.v…
Các chuyển động chính, ăn dao có thể là chuyển động quay hoặc chuyển động tịnh tiến của dao hoặc phôi.
43

Giáo trình Trang bị điện Lê Văn Mai
1.2 Trang bị điện máy tiện.
* Chức năng, công dụng của máy tiện: Máy tiện là một loại máy cắt gọt kim loại. Các chi tiết sau khi gia công trên máy tiện có hình dáng
gần đúng yêu cầu (gia công thô) hoặc thoả mãn phần nào yêu cầu về độ chính xác của kích thước và độ bóng bề mặt.
Trên máy tiện có thể thực hiện nhiều nguyên công tiện: Tiện trụ ngoài, Tiện trụ trong, Tiện côn, Tiện định hình…
Ngoài ra nếu sử dụng các dụng cụ cắt khác như mũi khoan, doa… thì còn có thực hiện một số nguyên công khác như khoan, doa, tiện ren, taro ren…
* Phân loại máy tiện: Nhóm máy tiện có thể phân loại theo những đặc điểm sau:
• Theo công dụng: Máy tiện vạn năng, Máy tiện chuyên trách, Máy tiện ren, Máy tiện mặt đầu, Máy tiện chuyên dùng: Thực hiện một nguyên công nào đó.• Theo hình thức truyền động chính: Máy tiện đứng: Chi tiết quay theo phương thẳng đứng, Máy tiện ngang: Chi tiết quay theo phương nằm ngang.• Theo mức độ phức tạp của hệ thống điện: Đơn giản: Dùng động cơ KĐB với 1- 2 cấp tốc độ cho truyền động chính, Trung bình: Dùng động cơ KĐB nhiều cấp tốc độ hoặc động cơ một chiều điều chỉnh mạch hở, Phức tạp: Điều chỉnh và ổn định tốc độ với chỉ tiêu chất lượng cao.
* Các chuyển động trên máy tiện và yêu cầu TBĐ cho các hệ truyền động. Các chuyển động trên máy tiện gồm hai nhóm cơ bản: - Chuyển động cơ bản:
Chuyển động chính: là chuyển động quay tròn của chính Chuyển động ăn dao: Là chuyển động tịnh tiến của bàn dao có gá dao
--Chuyển động phụ: Bao gồm các chuyển động: bơm dầu bôi trơn, bơm nước làm mát, di chuyển nhanh bàn dao, chuyển động nâng, hạ, kẹp xà… Mạch điện máy tiện T616
*Giới thiệu sơ đồ. Trên máy trang bị 3 động cơ không đồng bộ 3 pha rôto lồng sóc
- ĐC: Động cơ truyền động chính công suất 4,5KW,tốc độ 1450v/p- ĐD: Động cơ bơm dầu,công suất 0,1KW,tốc độ 2850v/p- ĐN: Động cơ bơm nước làm mát,công suất 0,125KW,tốc độ 2850v/p- KC: Là công tắc gat nhiều tiếp điểm đóng mở ở vị trí khác nhau. Có hai vị trí làm việc. Tay gạt
của nó được đặt trên thân máy. Các rơ le công tắc
- PH: Rơ le điện áp bảo vệ không hoặc cực tiểu- KT,KN: Công tắc tơ khống chế quay thuận và nghịch của động cơ trục chính- KD: Công tắc tơ khống chế động cơ bơm dầu.
-Chiếu sáng cục bộ cho máy nhờ BA và bóng đèn 36 V thông qua khóa K
* Nguyên lý hoạt động
Khống chế sự làm việc của máy bằng KC đặt tại ụ đứng. Đóng áp tô mát đầu vào CB, khi tay gạt ở vị trí giữa (ứng với vị trí 0 trong sơ đồ).Máy chưa làm việc, nếu điện áp đủ rơle điện áp PH tác động đóng tiếp điểm PH ở mạch điều khiển để tự duy trì cho mạch. Đồng thời chuẩn bị cho KD và KT hoặc KN làm việc
Khi đưa tay gạt KC về vị trí trên hoặc bên phải (ứng với vị trí số 1 trên sơ đồ) tiếp điểm KC(1-2)và KC(1-7)kín công tắc tơ KD và KT có điện tác động. Động cơ truyền động chính và động cơ bơm dầu làm việc.
44

Giáo trình Trang bị điện Lê Văn Mai
Khi đưa tay gạt KC về vị trí dưới hoặc bên trái (ứng với vị trí số 2 trên sơ đồ) thì tiếp điểm KC(1-5) và KC(1-7)kín.Công tắc tơ KT mất điện, công tắc tơ KD và KN có điện tác động đóng động cơ bơm dầu làm việc và động cơ truyền động chính quay theo chiều ngược lại.
Đóng mở động cơ bơm nước bằng cầu dao CD. Nó cũng chỉ làm việc khi động cơ bơm dầu ĐD đã làm việc.Chiếu sáng cục bộ trên máy bằng đèn Đ 36v lấy điện qua máy biến áp BA nhờ khóa K
Khi muốn dừng máy ta đưa tay gạt về vị trí giữa (0). KD,KT(hoặc KN) mất điện, các động cơ được cắt ra khỏi lưới và dừng tự do.
1.3.Trang bị điện máy phay.Máy phay dùng để gia công mặt phẳng, phay mặt trong và mặt ngoài, mặt pơrôphin ( thí dụ mặt cam
hay cam thùng ) và các mặt phức tạp ( như các mặt khác nhau của chày, cối dập, khuôn ép v.v…);cắt ren vít trong và ngoài, cắt bánh xe khía và dao cắt nhiều lưỡi có răng thẳng và xoáy; phay mặt tròn xoay định hình, phay cắt rãnh thẳng và rãnh xoắn.Căn cứ theo khả năng thực hiện nhiệm vụ khác nhau, máy phay được chia ra làm 2 nhóm chính:
1. Máy phay vạn năng2. Máy phay chuyên môn hoá
Trong phay van năng có kiểu máy phay nằm, phay đứng, máy phay giường v v…
45
CC3
CC1 CC2
CD
KC
KC
2 0 1
2 0 1
KTKN
Đ
KD
KD
KNKT
PH
PH
K
ĐN
CB
KN
KD
KT
ĐC ĐD
Giáo trình Trang bị điện Lê Văn Mai
Các kiểu máy phay chuyên môn hoá dùng trong sản xuất khối lớn. Những máy này dùng để hoàn thành những công việc nhất định, trên một số vật phẩm tương đối hẹp. Những máy phay chuyên môn hoá sau đây được dùng nhiều nhất:máy phay rãnh then, máy phay ren vít, máy phay then,máy phay chép hình, máy phay tiện.
Máy phay làm việc được tốt về phần cơ, thì không thể nào thiếu được được phần điện, mà phần điện có tính chất quyết định sự vận hành của máy phay và điện cũng đảm bảo an toàn cho phần vận hành của máydưới đây sẽ giới thiệu một số sơ đồ nguyên lý về điện của một số kiểu máy phay thường gặp.
Mạch điện trong máy phay của Liên Xô kiểu 6H82, 6H83 và của Việt Nam kiểu P12A, P623, P82.
Mạch điện máy phay 6H82 * Giới thiệu thiết bị của máy: trên máy có ba động cơ không đồng bộ 3 pha rôto lông sóc điện áp 220/380V.
Động cơ ĐC quay dao phay, công suất 7KW, tốc độ 1440vg/ph.Động cơ ĐB truyền động bàn, công suất 1,7KW, tốt độ 1420vg/ph.Động cơ ĐN bơm chất lỏng làm lạnh, công suất 0,125KW, tốt độ 2800 vg/ph.
Mạch khống chế 127V, mạch điện chiếu sáng 36V.*Nguyên lý làm việc:a - Truyền động chính: đóng cầu dao CD cung cấp điện cho mạch khống chế. Bật công tắt CĐ chọn
chiều quay trục chính( CĐ có 3 vị trí: trái, phải và giữa. Khi đảo chiều cần ngắt động cơ ra khỏi mạng điện vì bộ chuyển đổi chỉ đóng ngắt động cơ khi không tải). Bật công tắc Cđ chọn chế độ làm việc tự động hoặc bằng tay.
Ấn nút M1 hoặc M2, khởi động từ K2 tác động, tiếp điểm thường mở K2 (8-9) đóng lại tự duy trì, tiếp điểm thường mở K2 (15-16) đóng lại cung cấp cho mạch khống chế truyền động bàn. Các tiếp điểm thường mở K2 ở mạch động lực đóng lại, động cơ ĐC quay làm cho dao phay quay. Bật công tắt 2Ct khởi động từ K3 tác động. Động cơ bơm chất lỏng làm mát làm việc.
Khi sang số truyền động trục chính, tiếp điểm thường mở của hãm cắt 1KBU (1-4) đóng lại, khởi động từ K1 tác động. Các tiếp điểm thường mở của khởi động từ K1 ở mạch động lực đóng lại. Các điện trở R1, R2 được đưa vào hai pha stato động cơ ĐC, động cơ làm việc với mômen quay nhỏ để đưa các bánh răng vào ăn khớp. Kết thúc quá trình sang số, hãm cắt 1KBU lại được đưa vào vị trí ban đầu.
Khi hãm động cơ trục chính ấn nút D1 hoặc D2. Ở thời điểm ban đầu các tiếp điểm của rơle kiểm tra tốc độ PKC (3-4) vẫn đóng. Khởi động từ K1 tác động, tiếp điểm thường mở K1 (2-3) đóng lại để duy trì. Các tiếp điểm của khởi động từ K1 ở mạch động lực đóng lại đấu động cơ ĐC vào lưới điện qua các điện trở R1, R2 với từ trường ngược lại để hãm ngược. Khi tốc độ động cơ giảm đến trị số nào đó, tiếp điểm của rơle kiểm tra tốc độ PKC (3-4) mở ra, khởi động từ K1 mất điện, động cơ ĐC được cắt ra khỏi lưới điện và ngừng quay .b - Truyền động bàn:
+ Khống chế bằng tay: xoay công tắc điều khiển Cđ vào vị trí điều khiển bằng tay (Cđ2 mở, Cđ1 đóng) để truyền động bàn về phía trái hoặc phía phải đưa tay gạt cơ khí ở phí trước bàn về phía trái hoặc phía phải. Các tiếp điểm của hãm cắt 1KA3 (16-24) hoặc 1KA1 (16-17) đóng lại. Các tiếp điểm 1KA4 (22-23) hoặc 1KA2 (23-15) mở ra. Khởi động từ K5 hoặc K4 tác động, các tiếp điểm K5 hoặc K4 ở mạch động lực đóng lại đưa động cơ ĐB vào làm vịêc, bàn sẽ di chuyển về phía trái hoặc phía phải. Nếu bàn
46
Cđ2
Cđ1
K6
1KA-1
2KA-1
2KA-2 2KA-4
22 1KA-4 1KA-2
3KA-2
3KA-1
1KA-3
2KA-3
N1
N2
12
CT2 11
7 8
6
2
K2
D1
D2
M1
M2
1BA
2BA
CC4
CC3
CT1
CC4
2KBU
9 K1 10
K2 5
K1
3 PKC 4
PKC
K1
K2
K3
K4K2
K4
K4
K5
18 K5 19
K5
RN1
RN2
RN3
RN2 RN3
CC2
RN1
K1 K2 K3 K4 K5
K6
NCC Đ
R 1 1KBU
CC1
CD
13 14
15 16 17
20 21
23 24 25
26
ĐC ĐN ĐB
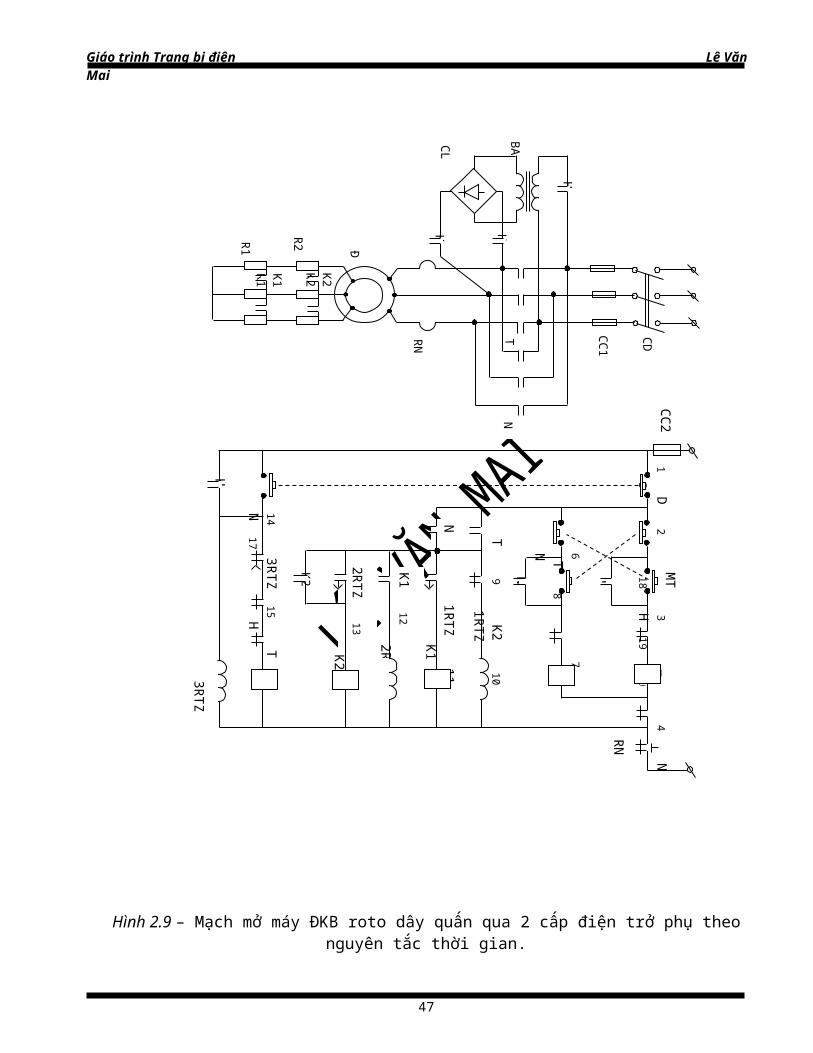
Giáo trình Trang bị điện Lê Văn Mai
đang di chuyển với tốc độ ăn dao ấn nút 3KY-1 hoặc 3KY-2 khởi động từ K6 tác động, các tiếp điểm K6 ở mạch động lực đóng lại, nam châm NC hút. Lực hút của nam châm tác động vào khớp ma sát cơ khí làm cho bàn di chuyển nhanh theo chiều đang ăn dao của bàn.
Để di chuyển bàn ra, vào đưa tay gạt cơ khí ở cạnh ụ về phía ngoài hoặc vào phía trong. Để di chuyển ụ lên, xuống đưa tay gạt ở cạnh ụ lên phía trên hoặc xuống phía dưới. Trong cả hai trường hợp này các tiếp điểm của hãm cắt 2KA3 ( 16-24) hoặc 2KA1 (16-17) đóng, các tiếp điểm 2KA4 (14-15) hoặc 2KA2 (13-14) mở ra, khởi động từ K5 hoặc K4 tác động. Các tiếp điểm K5 hoặc K4 thường mở ở mạch động lực đóng lại, động cơ ĐB làm việc đưa bàn di chuyển ra hoặc vào, đưa ụ lên hoặc xuống với tốc độ ăn dao.Nếu bàn và ụ đang làm việc với tốc độ ăn dao ấn nút N1 hoặc N2 khởi động từ K6 tác động làm cho nam châm điện từ NC hút. Bàn hoặc ụ di chuyển nhanh theo chiều đang làm việc.
+ Khống chế tự động theo chiều dọc bàn: công tắc Cđ đặt ở vị trí tự động tiếp điểm Cđ 1 (8-22) mở ra, các tiếp điểm Cđ 2 (15-23) đóng lại.* Trên máy có thể thực hiện các chu trình sau:
- Từ hành trình chạy nhanh phải ăn dao phải, từ hành trình ăn dao phải chạy nhanh về phía trái và ngừng lại ở vị trí bên trái.
- Từ hành trình chạy nhanh trái sang ăn dao trái, từ hành trình ăn dao trái chạy nhanh v ề phiá phải và ngừng lại ở vị trí bên phải.
47
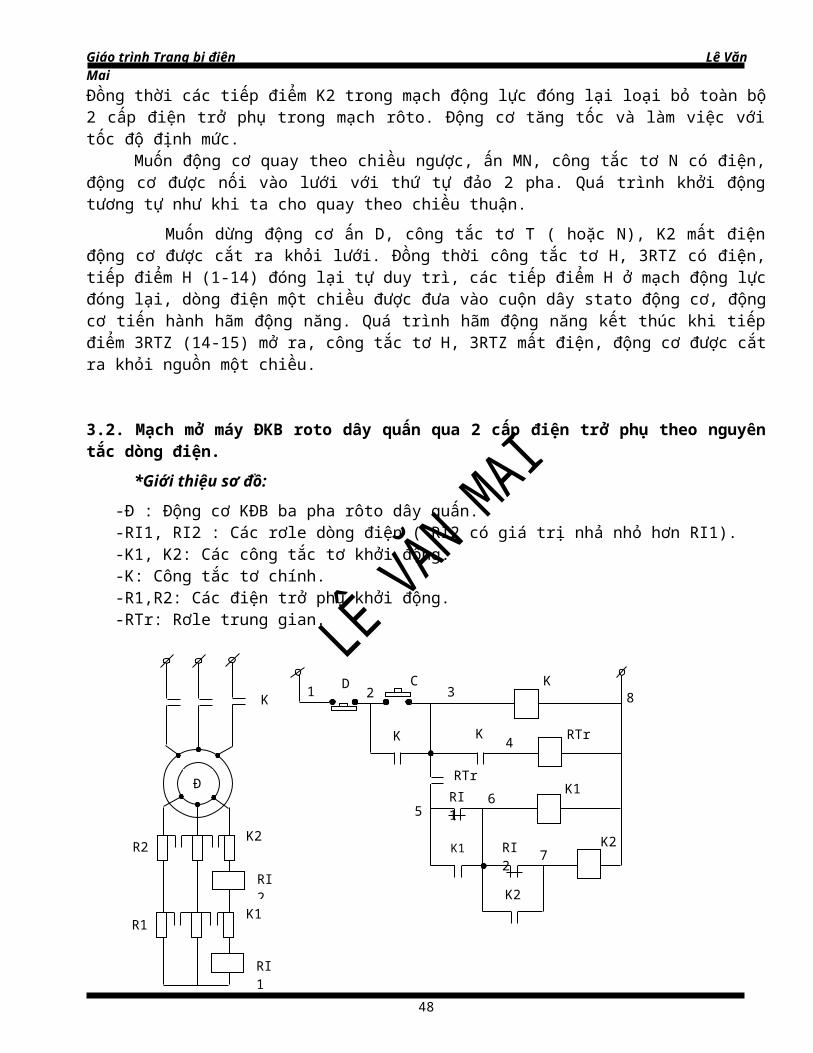
Giáo trình Trang bị điện Lê Văn Mai
- Từ hành trình ăn dao trái sang chạy nhanh phải, từ chạy nhanh phải sang ăn dao phải, từ ăn dao phải sang chạy nhanh trái từ chạy nhanh trái sang ăn dao trái và lập lại chu kỳ đầu.
Chu trình tự động thực hiện như sau: giả sử chuyển tay gạt cơ khí ở trước bàn về phía trái, tiếp điểm của hãm cắt 1KA3 (16-24) đóng lại, tiếp điểm 1KA4 (22-23) mở ra, khởi động từ K5, K6 tác động đưa bàn di chuyển nhanh về phía trái. Khi chi tiết đến gần dao tay gạt cơ khí gắn trên bàn tác động vào cam tám vấu lồi làm cho tiếp điểm của hãm cắt 3KA1 (20-26) mở ra, 3KA2 (20-21) đóng lại. Khởi động từ K6 nhả ra cắt hành trình chạy nhanh của bàn. Khi cắt gọt xong tay gạt cơ khí gắn trên bàn tác động vào tay gạt ở trước bàn làm cho tiếp điểm của hãm cắt 1KA1 ( 16-17 ), 1KA4 (22-23) đóng lại, tiếp điểm 1KA2 (23-15), 1KA3 (16-24) mở ra. Lúc đó khởi động từ K5 vẫn làm việc theo mạch (1-2-7-8-13-14-15-16-20-21-24-K5-25-19-12-6-T1-112).
Sau đó tay gạt cơ khí gắn trên bàn tác động vào cam tám vấu làm cho tiếp điểm của hãm cắt 3KA2 (20-21) mở ra, tiếp điểm 3KA1 (20-26) đóng lại. khởi động từ K5 nhả ra, khởi động từ K4, K6 tác động bàn di chuyển nhanh về phía phải. Đến vị trí bên phải nếu muốn cho bàn ngừng lại đưa tay gạt cơ khí gắn ở trước bàn về vị trí giữa.Nếu không đưa tay gạt cho bàn dừng lại thì tay gạt cơ khí gắn ở trước bàn tác động vào cam tám vấu làm cho tiếp điểm của hãm cắt 3KA2 (20-21) đóng lại, tiếp điểm 3KA1 (20-26) mở ra. Khởi động từ K6 ngừng làm việc bàn chuyển sang tốc độ ăn dao.
Sau đó tay gạt cơ khí gắn trên bàn tác động vào tay gạt ở trước bàn làm cho tiếp điểm của hãm cắt 1KA1 (16-17), 1KA4 (22-23) mở ra, tiếp điểm 1KA2 (23-15), 1KA3 (16-24) đóng lại, khởi động từ K4 vẫn làm việc theo mạch (1-2-7-8-13-14-15-16-20-21-17-K4-18-19-12-6-T1-112). Tiếp theo đó tay gạt cơ khí gắn trên bàn tác động vào cam tám vấu làm cho tiếp điểm hãm cắt 3AK2 (20-21) mở ra, tiếp điểm 3KA1 (20-26) đóng lại, khởi động từ K4 nhả ra, khởi động từ K5, K6 tác động, bàn di chuyển nhanh về phía trái. Khi tay gạt cơ khí gắn trên bàn tác động vào cam tám vấu làm cho tiếp điểm của hãm cắt 3KA1 (20-26) mở ra, tiếp điểm 3KA2 (20-21) đóng lại, khởi động từ K6 nhã ra, bàn chuyển sang tốc độ ăn dao và lặp lại chu kỳ đầu.
1.4 Trang bị điện máy doa.*Giới thiệu chung và phân loại. Máy doa là máy gia công kim loại, để gia công các chi tiết với các nguyên công: khoét lỗ trụ, khoan
lỗ, có thể dùng để phay. Máy doa được chia thành hai loại chính: máy doa đứng (trục chính thẳng đứng) và máy
doa ngang (trục chính nằm ngang). Máy doa ngang dùng để gia công các chi tiết cỡ trung bình và nặng, máy doa ngang là loại máy mà dao doa được gá theo phương nằm ngang, còn chi tiết được gá trên bàn gá chi tiết. Trên máy doa ngang, nếu dùng dao phay mặt đầu có thể gia công mặt phẳng thẳng đứng, nếu dùng dao phay trụ có thể gia công mặt phẳng nằm ngang.
Các chuyển động của máy doa gồm: + Chuyển động cơ bản:
- Chuyển động chính: là chuyển động quay của trục chính gá dao doa. - Chuyển động ăn dao: tuỳ theo nguyên công thực hiện trên máy doa mà chuyển động ăn dao có
thể là: chuyển động tịnh tiến dọc trục của trục chính khi doa, khoan, tiện,… chuyển động tịnh tiến ngang, dọc bàn máy của bàn gá chi tiết. + Các chuyển động phụ:
Chuyển động bơm nước, bơm dầu, dịch chuyển ụ trục chính theo phương thẳng đứng, dịch chuyển các trụ, chuyển động quay bàn…
* Yêu cầu trang bị điện cho các truyền động trên máy doa
- Truyền động chính : Yêu cầu đảo chiều quay, phạm vi điều khiển tốc độ D = 130/1 với công suất không đổi. Độ trơn điều
chỉnh φ = 1,26 Hệ TĐ chính yêu cầu hãm dừng nhanh.
48
Giáo trình Trang bị điện Lê Văn Mai
Trong thực tế, hệ TĐ chính máy doa thường sử dụng động cơ KĐB roto lồng sóc và hộp tốc độ, động cơ có một hoặc vài cấp tốc độ điều chỉnh bằng phương pháp thay đổi số đôi cực (thường là hai cấp tốc độ), ở máy doa cỡ nặng để đơn giản về kết cấu cơ khí và hạn chế momen ở vùng tốc độ thấp có thể sử dụng động cơ một chiều điều chỉnh tốc độ theo hai vùng.
- Truyền động ăn dao: Phạm vi điều chỉnh rộng, thực hiện bằng phương pháp điện, có dải điều chỉnh là D= (1500-
2000)/1, lượng ăn dao được điều chỉnh trong phạm vi 2mm với v = 600mm/ph khi di chuyển nhanh có thể đạt tới 2,5 - 3m/ph. Lượng ăn dao (mm/vòng) ở những máy cỡ nặng yêu cầu giữ không đổi khi tốc độ trục chính thay đổi.
Điều chỉnh trơn tốc độ φ → 1, Mc = const. Độ ổn định tốc độ ∆n% ≤ 5% Hệ TĐ ăn dao máy doa phải đảm bảo độ tác động nhanh, cao, dừng máy phải chính xác, đảm bảo
sự liên động với TĐ chính khi làm việc tự động. Do các yêu cầu trên mà TĐ ăn dao máy doa thường sử dụng động cơ một chiều kích từ độc lập với
các hệ MĐKĐ - Đ; T - Đ.
Mạch điện máy doa 2620.
* Giới thiệu sơ đồ: Máy doa 2620 là máy cỡ trung bình: Đường kính trục chính: 90mm Công suất động cơ TĐ chính: 10KW Tốc độ quay trục chính điều chỉnh trong phạm vị (12,5 - 1600)v/ph Công suất động cơ ăn dao: 2,1KW Tốc độ động cơ ăn dao có thể điều chỉnh trong phạm vi (2,1 - 1500)v/ph, tốc độ lớn nhất: 3000v/ph.
Động cơ TĐ chính là động cơ KĐB roto lồng sóc hai cấp tốc độ: 1460v/ph khi dây quấn stator đấu tam giác, và 2890v/ph khi dây quấn stator đấu sao kép, việc chuyển đổi tốc độ từ thấp đến cao tương ứng với chuyển đổi từ đấu ∆ - YY và ngược lại được thực hiện bới tay gạt cơ khí 2KH có liên quan đến thiết bị chuyển đổi tốc độ. Nếu tiếp điểm 2KH hở, dây quấn động cơ đấu tương ứng với tốc độ thấp, khi 2KH kín dây quấn động cơ được đấu tương ứng với tốc độ cao. Động cơ được đảo chiều quay nhờ các công tắc tơ 1T, 1N, 2T, 2N
Trong sơ đồ còn có động cơ bơm dầu bôi trơn ĐB, nó được đóng cắt đồng thời với động cơ chính nhờ công tắc tơ KB và các tiếp điểm liên động. *Nguyên lý hoạt động. - Chế độ thử máy: Dùng các nút ấn TT hoặc TN, chỉ thực hiện với bộ dây nối hình tam giác với điện trở phụ trong mạch Stato. Quá trình thử máy kết thúc khita buông tay khỏi nút ấn.- Chế độ làm việc:
Tùy thuộc vào vị trí tay gạt chọn tốc độ động cơ trục chính mà 2KH hở hoặc kín.Khi 2KH hở, động cơ trục chính làm việc với bộ dây quấn Stato nối hình tam giác.Ấn MT hoặc MN, 1T hoặc 1N có điện, KB có điện đóng động cơ bơm nước vào lưới, đồng thời
tiếp điểm của nó trong mạch điều khiển cấp điện cho CH, động cơ trục chính được đóng vào lưới và quay với tốc độ chậm..
Khi 2KH kín , động cơ làm việc ở tốc độ nhanh. Quá trình khởi động chuyển đổi từ tam giác sang sao kép khống chế theo nguyên tắc thời gian.
49
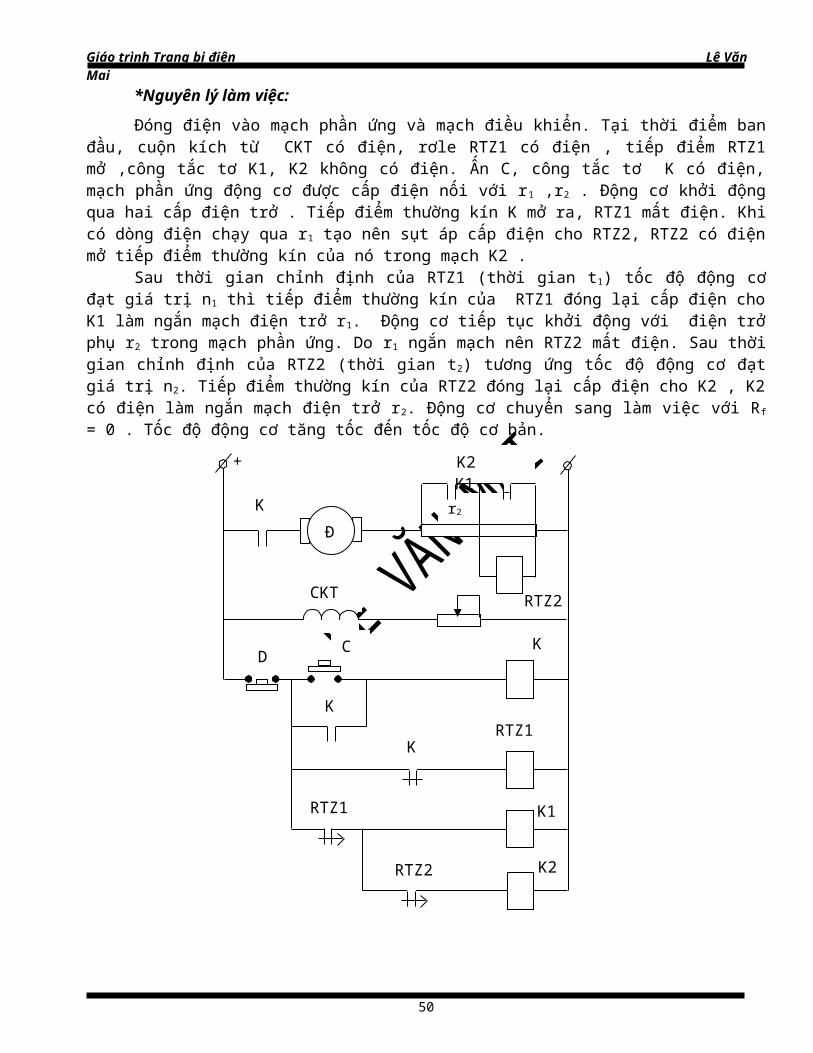
Giáo trình Trang bị điện Lê Văn Mai
- Hãm dừng:Ấn D, 1T( hoặc 1N ), KB, CH ( hoặc 1NH, 2NH) mất điện. Động cơ được cắt ra khỏi lưới.
Tùy thuộc vào chiều quay trước đó của rôto động cơ trục chính mà tiếp điểm của rơle kiểm tra tốc độ RKT1 hoặc RKT2 kín. Giả sử trước đó động cơ quay theo chiều thuận, tiếp điểm RKT1 đóng thì rơ le 1RH có điện đóng tiếp điểm của nó cấp điện cho 2N. Khi 2N có điện đóng bộ dây quấn Stato hình tam giác vào lưới với thứ tự pha ngược lại có điện trở phụ trong mạch stato, động cơ tiến hành hãm ngược. Quá trình hãm ngược kết thúc khi tốc độ động cơ giảm đến giá trị nhả của RKT.
50
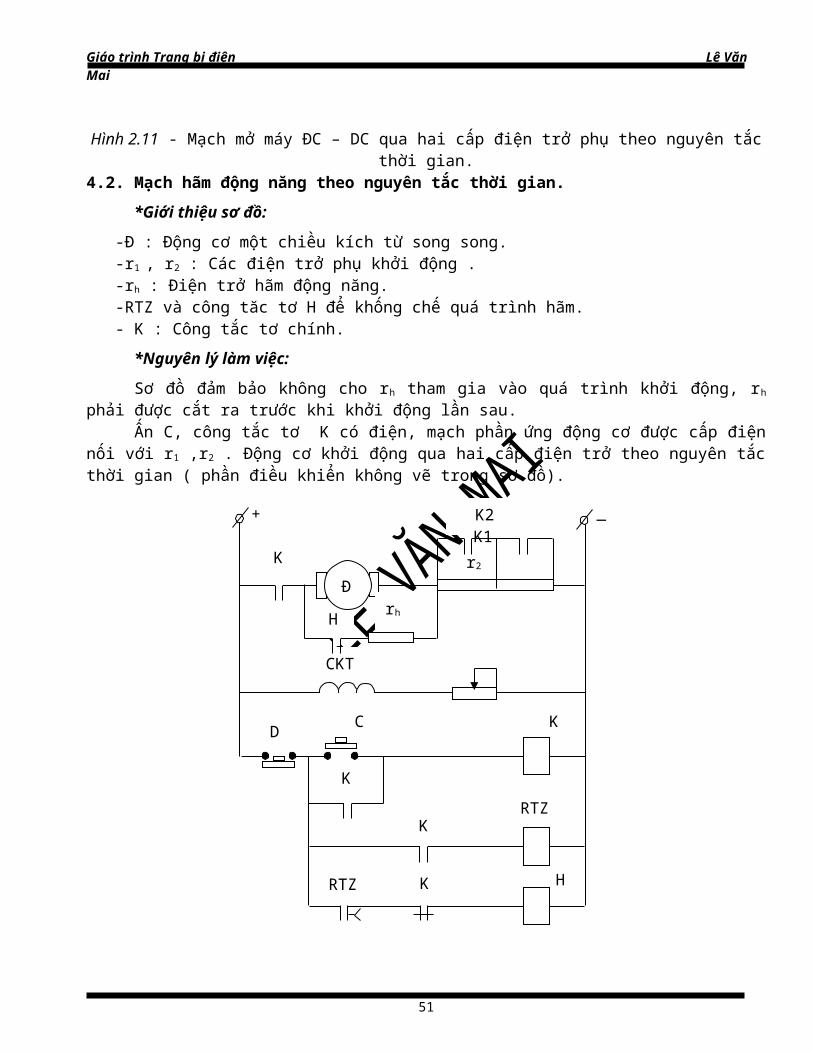
Giáo trình Trang bị điện Lê Văn Mai
1.5 Trang bị điện máy khoan.
* Giới thiệu thiết bị điện của máy khoan cần 2A53.Trên máy đặt 4 động cơ KĐB 3 pha rôto lông sóc. cấp điện áp ∆/ Y - 220/380V.Động cơ 1M truyền động chính, hai tốc độ kiểu T42/4-2, công suất 2,6/3KW, tốc độ 1420/2800vg/ph.Động cơ 2M di chuyển cần khoan kiểu A032-4, công suất 1KW, tốc độ 1410vg/ph.Động cơ 3M xiết và nới cần khoan và đầu khoan kiểu дIIT22-4, công suất 0,5KW, tốc độ 1410vg/ph.Động cơ 4M bơm nước làm mát kiểu IIA-22, công suất 0,125KW, tốc độ 2800vg/ph.
điện áp mạch điều khiển 127V; mạch chiếu sáng cục bộ 24V lấy từ máy biến áp 1BA.Các tay gạt trên máy:-BXX: Hãm cắt khống chế quá trình mở máy.- ПCB: Tay gạt chọn tốc độ động cơ trục chính, tùy thuộc vào vị trí tay gạt mà ПCB(5-6) hoặc ПCB(5-8) kín để cấp điện cho khởi động từ Δ hoặc YY, động cơ sẽ làm việc ở tốc độ thấp hoặc cao.- ПHB: Tay gạt chọn chiều quay động cơ trục chính, tùy thuộc vào vị trí tay gạt mà ПHB(5-10) hoặc ПHB(5-12) kín để cấp điện cho khởi động từ T hoặc N, động cơ sẽ làm việc ở chiều quay thuận hoặc ngược.- ПAZ: Công tắc hành trình hình trống liên động với roto động cơ 2M để tự động di chuyển và xiết nới cần khoan.- KBP: Công tắc hành trình đảm bảo không cho cần khoan di chuyển quá giới hạn.
* Nguyên lý làm việc của sơ đồ điện.Đóng áptômát đầu vào AB1 và AB2 cung cấp điện lưới cho mạch động lực và mạch điều khiển, trừ
động cơ bơm nước làm mát 4M, còn mạch động lực của các động cơ khác và mạch điều khiển điều phải cung cấp điện qua các vành góp điện KT.
Khi máy chưa làm việc tay gạt cơ khí khống chế chiều quay và khớp ma sát của trục chính đồng thời cũnh là tay gạt khống chế hãm cắt BXX hạn chế sự làm việc không tải của máy đặt ở vị trí giữa. Tiếp điểm BXX (3-4) đóng, tiếp điểm BXX (4-5) mở, rơ le điện áp RA tác động đóng tiếp điểm thường mở RA (3-4) để tự duy trì. Đặt chiều quay chính bằng tay gạt chuyển mạch ПHB. Khởi động từ T hoặc N tác động để định chiều quay của động cơ 1M. Đặt tốc độ chính bằng tay quay chuyển mạch ПCB. Khi đặt tay quay chọn tốc độ ở vị trí tốc độ cao làm cho tiếp điểm ПCB (5-8) đóng, khởi động từ YY tác động, động cơ 1M được đấu theo hình sao kép chạy với tốc độ 2800vg/ph. Chuyển tay gạt cơ khí khống chế hãm cắt BXX về phía trên hoặc phía dưới, hãm cắt BXX (4-5) đóng lại. Các khởi động từ T hoặc N và Δ hoặc YY tác động đưa động cơ truyền động chính 1M vào làm việc theo yêu cầu đã chọn ở trên.
Muốn ngừng động cơ 1M, chuyển tay gạt cơ khí khống chế hãm cắt BXX về vị trí giữa, tiếp điểm BXX (4-5) mở ra cắt sự làm việc của các khởi động từ T hoặc N và Δ hoặc YY, động cơ 1M ngừng quay.Muốn di chuyển cần khoan lên hoặc xuống, ấn nút 2KY hoặc 3KY. Khi ấn nút 2KY khởi động từ L tác động theo mạch 4-16-17-18-14-15-L-2. Tiếp điểm thường mở L (18-21) đóng lại chuẩn bị cho mạch tự duy trì. Các tiếp điểm thường mở L ở mạch động lại cung cấp điện cho động cơ 2M di chuyện cần khoan làm việc, cần khoan được nới ra khỏi cột và di chuyển lên phía trên.
Bộ tiếp điểm trượt ПAZ được liên hệ cơ khí với động cơ 2M khi động cơ 2M làm việc thì bộ tiếp điểm này cũng tác động, tiếp điểm ПAZ (16-21) đóng lại lúc này khởi động từ L được cung cấp điện theo
51
1BA
2BA
3 RN
1 2CC
127V 2C
C 2
RA
4 RA
BX
X 5 П
CB
6 YY
7 Δ
RA
8 Δ 9 Y
Y
RA
Δ
YY
ПH
B 10 N
11 T R
A
12 T 13 N
RA
1KY
16 3KY
17 2KY
18 KB
P R
A
19 20 KB
P
X
14 X 15 L
L
ПA
Z
ПA
Z
21 L
22 X
ПZK
23 ПB
K 24 M
25 K
26 27 K 28 M
AB
2 Δ Y
Y Y
Y L X
K M
T N
RN
KT
AB
1
K C
C1
4M 1M
2M 3M
T
N

Giáo trình Trang bị điện Lê Văn Mai
mạch 4-16-21-18-14-15-L-2 và được tự duy trì mặc dù nút ấn 2KY đã trở về vị trí ban đầu, cần khoan tiếp tục di chuyển lên phía trên.
Muốn ngừng di chuyển cần khoan ta ân nút 1KY cắt sự làm việc của khởi động từ L, tiếp điểm thường đóng L (21-22) đóng lại. Do tiếp điểm của bộ tiếp điểm trượt hình trống ПAZ (16-21) vẫn ở vị trí đóng nên khởi động từ X tác động làm cho động cơ 2M quay theo chiều ngược lại để xiết cần khoan vào trụ. Bộ tiếp điểm trượt hình trống ПAZ được quay trở về vị trí ban đầu làm cho tiếp điểm ПAZ (16-21) mở ra cắt sự làm việc của khởi động từ X kết thúc qua trình di chuyển cần khoan đi lên.
Di chuyển cần khoan đi xuống cũng tương tự như vậy nhưng thực hiện bằng nút ấn 3KY.
52

Giáo trình Trang bị điện Lê Văn Mai
Cần chú ý rằng sự làm việc của khởi động từ L v à tiếp điểm hình trống ПAZ (16-21) cũng như khởi động từ X và tiếp diểm hình trống ПAZ (16-14) phải phù hợp với nhau không thể đảo lộn giữa chúng được.
Để xiết chặt hoặc nới cần khoan và đầu khoan, gạt tay gạt cơ khí khống chế công tắt chuyển mạch ПZK làm cho khởi động từ K hoặc M tác động, động cơ 3M làm việc để xiết hoặc nới cần khoan về đầu khoan. Khi xiết hoặc nới xong, hãm cắt ПBK điều khiển bằng cơ cấu thuỷ lực tự động mở ra cắt điện khởi động từ K hoặc M và chuẩn bị mạch cho chiều ngược lại.
Liên hệ và bảo vệ trong máy.Bảo vệ ngắn mạch bằng các áptômát AB1, AB2 và cầu chì 1CC, 2CC.Bảo vệ quá tải bằng rơle nhiệt RN.Bảo vệ điện áp không bằng rơle điện áp RA.
Hạn chế máy chạy không tải bằng tay gạt cơ khí khống chế hãm cắt BXX. Khi chuyển tay gạt cơ khí cho động cơ 1M quay cũng là lúc đóng khớp ma sát vào trục động cơ để truyền động quay mũi khoan.Không cho cần khoan di chuyển quá giới hạn trên bằng hãm cuối KBP.Tự động cắt sự làm vịêc của động cơ 3M xiết hoặc nới cần khoan và đầu khoan bằng cơ cấu thuỷ lực KBK.
1.6. Trang bị điện máy mài.
Máy mài có hai lọai chính: Máy mài tròn và máy mài phẳng. Ngoài ra còn có các máy khác như: máy mài vô tâm, máy mài rãnh, máy mài cắt, máy mài răng v.v… Thường trên máy mài có ụ chi tiết hoặc bàn, trên đó kẹp chi tiết và ụ đá mài, trên đó có trục chính với đá mài. Cả hai đều đặt trên bệ máy.
Máy mài tròn có hai loại: máy mài tròn ngoài (h 5-2a), máy mài tròn trong (h 5-2b). Trên máy mài tròn chuyển động chính là chuyển động quay của đá mài; chuyển động ăn dao là di chuyển tịnh tiến của ụ đá dọc trục (ăn dao dọc trục) hoặc di chuyển tịnh tiến theo hướng ngang trục (ăn dao ngang) hoặc chuyển động quay của chi tiết (ăn dao vòng). chuyển động phụ là di chuyển nhanh ụ đá hoặc chi tiết v.v…
Máy mài phẳng có hai loại: mài bằng biên đá (hình 5-2c) và mặt đầu (h 5-2d). Chi tiết được kẹp trên bàn máy tròn hoặc chữ nhật. Ở máy mài bằng biên đá, đá mài quay tròn và chuyển động tịnh tiến ngang so với chi tiết, bàn máy mang chi tiết chuyển động tịnh tiến qua lại. Chuyển động tịnh tiến quay
53
Giáo trình Trang bị điện Lê Văn Mai
của đá là chuyển động chính, chuyển động ăn dao là di chuyển của đá (ăn dao ngang) hoặc chuyển động của chi tiết (ăn dao dọc). Ở máy mài bằng mặt đầu đá, bàn có thể là tròn hoặc chữ nhật, chuyển động quay của đá là chuyển động chính, chuyển động ăn dao là di chuyển ngang của đá - ăn dao ngang hoặc chuyển động tịnh tiến qua lại của bàn mang chi tiết - ăn dao dọc.
* Các đặc điểm về truyền động điện và trang bị điện của máy mài.
* Truyền động chính: Thông thường máy không yêu cầu điều chỉnh tốc độ, nên sử dụng động cơ không đồng bộ roto lồng sóc. Ở các máy mài cỡ nặng, để duy trì tốc độ cắt là không đổi khi mòn đá hay kích thước chi tiết gia công thay đổi, thường sử dụng truyền động động cơ có phạm vi điều chỉnh tốc độ là D = (2 ÷ 4):1 với công suất không đổi.Ở máy mài trung bình và nhỏ v = 50 ÷ 80 m/s nên đá mài có đường kính lớn thì tốc độ quay đá khoảng 1000vg/ph. Ở những máy có đường kính nhỏ, tốc độ đá cao. Động cơ truyền động là các động cơ đặc biệt, đá mài gắn trên trục động cơ, động cơ có tốc độ (24000 ÷ 48000) vg/ph, hoặc có thể lên tới 150000 ÷ 200000) vg/ph. Nguồn của động cơ là các bộ biến tần, có thể là các máy phát tần số cao (BBT quay) hoһc là các bộ biến tần tĩnh (BBT bằng Thyristor). Mô men cản tĩnh trên trục động cơ thường là 15 ÷ 20% momen định mức.Mô men quán tính của đá và cơ cấu truyền lực lại lớn: 500 ÷ 600% momen quán tính của động cơ, do đó cần hãm cưỡng bức của động cơ quay đá. Không yêu cầu đảo chiều quay đá. * Truyền động ăn dao. a/ Máy mài tròn : Ở máy cỡ nhỏ, truyền động quay chi tiết dùng của động cơ không đồng bộ nhiều cấp tốc độ (điều chỉnh số đôi cực p) với D = (2 ÷ 4):1. Ở các máy lớn thì dùng hệ thống biến đổi - động cơ một chiều (BBĐ-ĐM), hệ KĐT – ĐM có D = 10/1 với điều chỉnh điện áp phần ứng. Truyền động ăn dao dọc của bàn máy tròn cỡ lớn thực hiện theo hệ BBĐ- ĐM với D = (20 ÷ 25)/1. Truyền động ăn dao ngang sử dụng thủy lực.b/ Máy mài phẳng: Truyền động ăn dao của ụ đá thực hiện lặp lại nhiều chu kì, sử dụng thuỷ lực. Truyền động ăn dao tịnh tiến qua lại của bàn dùng hệ truyền động một chiều với phạm vi điều chỉnh tốc độ D = (8 ÷ 10):1 * Truyền động phụ trong máy mài và truyền động di chuyển nhanh đầu mài, bơm dầu của hệ thống bôi trơn, bơm nước làm mát thường dùng hệ truyền động xoay chiều với động cơ không đồng bộ roto lồng sóc.
Mạch điện máy mài 3A161. Máy mài tròn 3A161 được dùng để gia công mặt trụ của các chi tiết có chiều dài dưới 1000mm và đường kính dưới 280mm; đường kính đá mài lớn nhất là 600mm.
Động cơ ĐM (7 kW, 930vg/ph) quay đá mài.Động cơ ĐT (1,7 kW, 930 vg/ph) bơm dầu cho hệ thống thủy lực để thực hiện dao ăn ngang của ụ
đá, ăn dao dọc của bàn máy và di chuyển nhanh ụ đá ăn vào chi tiết hoặc ra khỏi chi tiết.Động cơ ĐC (0,76 kW, 250 ÷ 2500 vg/ph) quay chi tiết mài. Động cơ ĐB (0,125 kW, 2800 vg/ph) truyền động bơm nước.
Đóng mở van thủy lực nhờ các nam châm điện 1NC, 2NC và các tiếp điểm 2KT và 3KT. Động cơ quay chi tiết được cung cấp điện từ khuếch đại tự KĐT. KĐT nối theo sơ đồ cầu ba pha kết hợp với các điot chỉnh lưu, có 6 cuộn làm việc và 3 cuộn dây điều khiển CK1, CK2 và CK3. Cuộn CK3 được nối với điện áp chỉnh lưu 3CL tạo ra sức từ hoá chuyển dịch. Cuộn CK1 vừa là cuộn chủ đạo vừa là cuộn phản hồi âm điện áp phần ứng. Điện áp chủ đạo Ucđ lấy trên biến trở 1BT, còn điện áp phản hồi Uph âm áp lấy trên phần ứng động cơ.
Điện áp đặt vào cuộn dây CK1 là: UCK1 = Ucđ - Uph = Ucđ – kUư
Cuộn CK2 là cuộn phản hồi dương dòng điện phần ứng động cơ. Nó được nối vào điện áp thứ cấp của biến dòng BD qua bộ chỉnh lưu 2CL. Vì dòng điện sơ cấp biến dòng tỉ lệ với dòng điện phần ứng động cơ (I1= 0,815Iư) nên dòng điện trong cuộn CK2 cũng tỉ lệ với dòng điện phần ứng. Sức từ hoá phản hồi được điều chỉnh như biến trở 2BT.
54
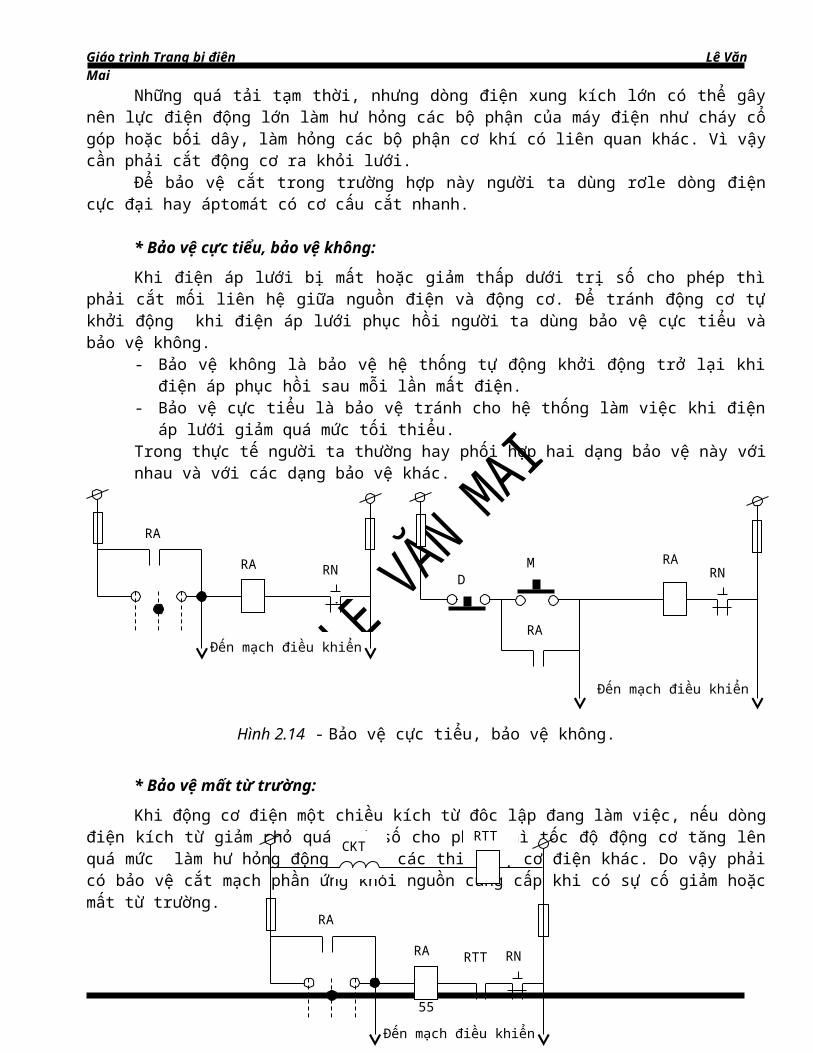
Giáo trình Trang bị điện Lê Văn Mai
Tốc độ động cơ được điều chỉnh bằng cách thay đổi điện áp chủ đảo Ucđ (nhờ biến trở 1BT). Để làm cứng đặc tính cơ ở vùng tốc độ thấp, khi giảm Ucđ còn phải tăng hệ số phản hồi dương dòng điện. Vì vậy, người ta đã đặt sẵn khâu liên hệ cơ khí giữa con trượt 2BT và 1BT.
Nguyên lý làm việc của sơ đồ điều khiển tự động như sau:
55
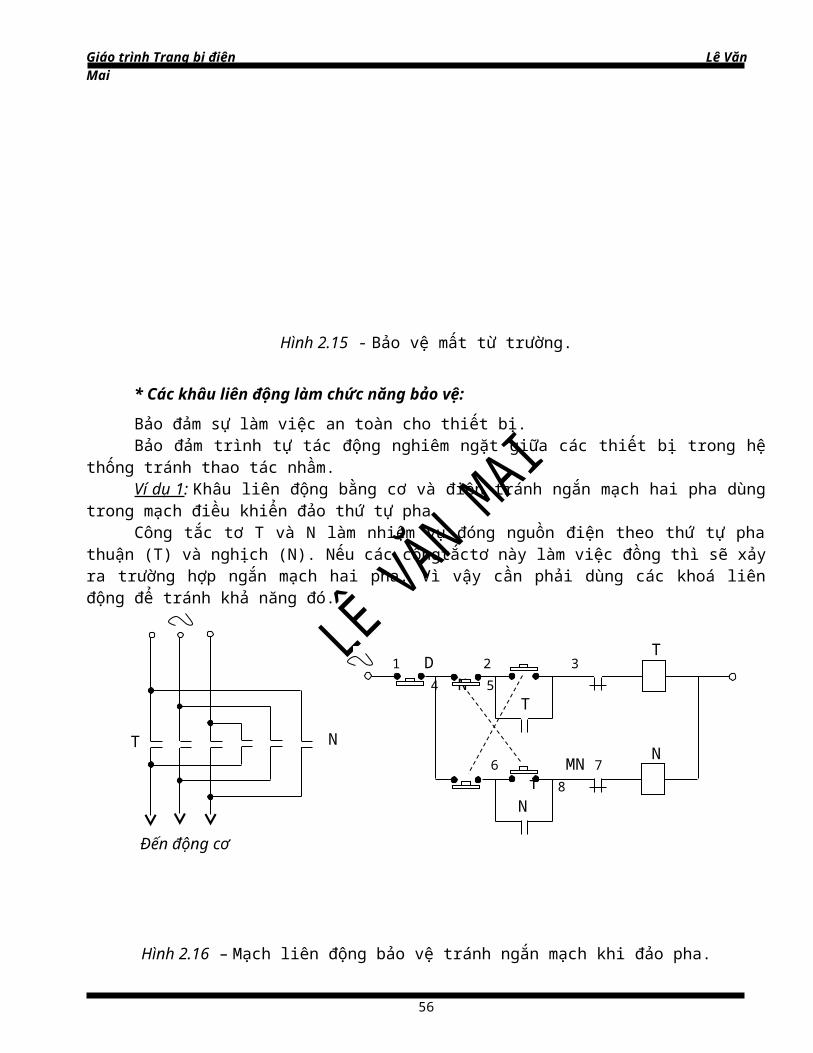
Giáo trình Trang bị điện Lê Văn Mai
Sơ đồ cho phép điều khiển máy ở chế độ thử máy và chế độ làm việc tự động. Ở chế độ thử máy các công tắc 1CT, 2CT, 3CT được đóng sang vị trí 1. Mở máy động cơ ĐT nhờ ấn nút MT, sau đó có thể khởi động đồng thời ĐM và ĐB bằng nút ấn MN. Động cơ ĐC được khởi động bằng nút ấn MC.
Ở chế độ tự động, quá trình hoạt động của máy gồm 3 giai đoạn theo thứ tự sau:1) Đưa nhanh ụ đá vào chi tiết gia công nhờ truyền động thuỷ lực, đóng các động cơ ĐC và ĐB.2) Mài thô, rồi tự động chuyển sang mài tinh nhờ tác động của công tắc cữ.3) Tự động đưa nhanh ụ đá ra khỏi chi tiết và cắt điện các động cơ ĐC, ĐB
Trước hết đóng các công tắc 1CT, 2CT, 3CT sang vị trí 2. Kéo tay gạt điều khiển (được bố trí trên máy) về vị trí di chuyển nhanh ụ đá vào chi tiết (nhờ hệ thống thuỷ lực). Khi ụ đá đi đến vị trí cần thiết, công tắc hành trình 1KT tác động, đóng mạch cho các cuộn dây công tắc tơ KC và KB, các động cơ ĐC và ĐB được khởi động. Đồng thời truyền động thuỷ lực của máy được khơi động. Quá trình gia công bắt đầu. Khi kết thúc giai đọan mài thô, công tắc hành trình 2KT tác động, đóng mạch cuộn dây rơle 1RTr. Tiếp điểm của nó đóng điện cho cuộn dây nam châm 1NC, để chuyển đổi van thuỷ lực, làm giảm tốc độ ăn dao của ụ đá. Như vậy giai đọan mài tinh bắt đầu. Khi kích thước chi tiết đã đạt yêu cầu, công tắc hành trình 3KT tác động, đóng mạch cuộn dây rơle 2RTr. Tiếp điểm rơle này đóng điện cho cuộn dây nam châm 2NC để chuyển đổi van thuỷ lực, đưa nhanh ụ đá về vị trí ban đầu. Sau đó, công tắc 1KT phục hồi cắt điện công tắc tơ KC và KB; động cơ ĐC được cắt điện và được hãm động năng nhờ công tắc tơ H. Khi tốc độ động cơ đủ nhỏ, tiếp điểm rơle tốc độ RKT mở ra, cắt điện cuộn dây công tắc tơ H. Tiếp điểm của H cắt điện trở hãm ra khỏi phần ứng động cơ.
2.Trang bị điện cho cơ cấu sản xuất.2.1 Trang bị điện dây chuyền sản xuất liên tục.* Giới thiệu sơ đồ:Mạch điện đảm bảo động cơ ở cuối dây chuyền làm việc trước, sau đó các động cơ ở trước mới làm việc.Khi dừng, động cơ ở đầu dây chuyền dừng trước sau đó mới đến động cơ ở cuối dây chuyền.
56

Giáo trình Trang bị điện Lê Văn Mai
- Nếu một trong các động cơ bị sự cố (ngừng hoạt động) thì các động cơ ở trước nó phải dừng ngay.
- K1, K2, K3, K4: các công tắc tơ đóng cắt điện cho các động cơ Đ1, Đ2, Đ3, Đ4.- 1RTZ, 3RTZ, 5RTZ là các rơle thời gian khống chế trình tự khởi động các động cơ.- 2RTZ, 4RTZ, 6RTZ, 1RTr, 2RTr, 3RTr là các rơle thời gian và các rơle trung gian khống chế
trình tự dừng các động cơ.
57
CT6
CT1
CT3
CT2
CT4
3RTr
3RTr 15 5RTZ 16 K1 R
N1
3RTr 14 6RTZ
6RTZ 11 3RTZ 12 K2 R
N2
K2 13 5RTZ
2RTr 9 4RTZ
D 17 3 RTr
6RTZ 10 2RTr
4RTZ 6 1RTZ 7 K3 R
N3
K3 8 3RTZ
1RTr 4 2RTZ
4RTZ 5 1RTr
1 C 2 2RTZ 3 K
4 RN
4
K4 C
T5 1RTZ
CC
1 CC
2 CC
3 CC
4
K1 K
2 K3 K
4
RN
1 RN
2 RN
3 RN
4
Đ1 Đ
2 Đ3 Đ
4
CD
Giáo trình Trang bị điện Lê Văn Mai
- 1CT ÷ 4CT là các công tắc thử nhấp các động cơ Đ4 ÷ Đ1.- 6CT, 5CT là các công tắc chọn chế độ làm việc và thử máy.- RN1 ÷ RN4 là các rơle nhiệt bảo vệ quá tải cho các động cơ Đ1 ÷ Đ4.
* Nguyên lý hoạt động:Đóng cầu dao CD.
- Chế độ thử máy: Bật CT6, CT5 về vị trí trên. Thử máy các động cơ Đ4 ÷ Đ1 bằng các công tắc 1CT ÷ 4CT.
- Chế độ làm việc:Bật CT6, CT5 về vị trí dưới, ấn C, 1TRZ và K4 có điện, tiếp điểm K4(1-2) đóng lại để duy trì,
đồng thời các tiếp điểm K4 ở mạch động lực đóng động cơ Đ4 vào làm việc. Sau thời gian chỉnh định của 1RTZ, tiếp điểm 1RTZ(6-7) đóng lại cấp điện cho K3 tác động đóng
động cơ Đ3 vào làm việc, đồng thời tiếp điểm K3(2-8) đóng lại cấp điện cho 3RTZ.Sau thời gian chỉnh định của 3RTZ, tiếp điểm 3RTZ(11-12) đóng lại cấp điện cho K2 tác động
đóng động cơ Đ2 vào làm việc, đồng thời tiếp điểm K2(2-13) đóng lại cấp điện cho 5RTZ.Sau thời gian chỉnh định của 5RTZ, tiếp điểm 5RTZ(15-16) đóng lại cấp điện cho K1 tác động
đóng động cơ Đ1 vào làm việc.Muốn ngừng hệ thống, ta ấn nút D, rơle 3RTr có điện tác động đống tiếp điểm 3RTr(2-17) tự duy
trì, đóng tiếp điểm 3RTr(2-14) cấp điện cho 6RTZ, mở tiếp điểm 3RTr(2-15) cắt điện K1, động cơ Đ1 được cắt ra khỏi lưới và dừng.
Sau thời gian chỉnh định của 6RTZ, tiếp điểm 6RTZ(2-11) mở ra cắt điện công tắc tơ K2, 5RTZ, động cơ Đ2 được cắt ra khỏi nguồn và dừng. Đồng thời tiếp điểm 6RTZ(2-10) đóng lại cấp điện cho 2RTr tác động đóng tiếp điểm 2RTr(2-9) cấp điện cho 4RTZ.
Sau thời gian chỉnh định của 4RTZ, tiếp điểm 4RTZ(2-6) mở ra cắt điện công tắc tơ K3, 3RTZ, động cơ Đ3 được cắt ra khỏi nguồn và dừng. Đồng thời tiếp điểm 4RTZ(2-5) đóng lại cấp điện cho 1RTr tác động đóng tiếp điểm 1RTr(2-4) cấp điện cho 2RTZ.
Sau thời gian chỉnh định của 2RTZ, tiếp điểm 2RTZ(2-3) mở ra cắt điện công tắc tơ K4, động cơ Đ2 được cắt ra khỏi nguồn và dừng. Đồng thời tiếp điểm K4(1-2) mở ra, các rơle 1RTZ, 2RTZ, 4RTZ, 6RTZ, 1RTr, 2RTr, 3RTr mất điện. Hệ thống ngừng hoạt động.
2.2 Trang bị điện lò điện. Sơ đồ một pha khống chế dịch cực lò HQ dùng hệ MĐKĐ-Đ
Máy điện khuếch đại MĐKĐ cấp điện cho động cơ Đ để dịch cực và có 3 cuộn kích từ:- Cuộn điều chỉnh CĐC1 để khống chế tự động
58
Giáo trình Trang bị điện Lê Văn Mai
- Cuộn CĐC2 để khống chế bằng tay- Cuộn phản hồi âm áp CFA. Cuộn này có s.t.đ ngược chiều với cuộn trên.
Ở chế độ tự động TĐ, các tiếp điểm 5-6 và 7-8 kín. Mở 1CD và đóng 2CD.điện áp trên chỉnh lưu 1CL tỉ lệ với dòng điện HQ và rơi trên điện trở 5R. điện áp ra trên chỉnh lưu 2CL tỉ lệ với điện áp HQ và rơi trên điện trở 4R. cuộn dây điều chỉnh CĐC1 của MĐKĐ nối với hiệu số điện áp lấy trên một phần của 5R và 4R, nghĩa là thực hiện quy luật điều chỉnh như (7-3) khi chưa có HQ, dòng bằng 0 và điện áp lớn nhất. s.t.đ cuộn CĐC1 có chiều để MĐKĐ phát điện áp cho động cơ Đ hạ điện cực xuống chậm. lúc này rơle dòng RD chưa tác động nên 3R tham gia vào mạch CĐC1 và s.t.đ của CĐC1 nhỏ. Mặt khác như sơ đồ vẽ, khi hạ cực động cơ được cấp điện với cực tính (+) ở trên nên điot 3CL nối tắt 7R làm tăng dòng cuộn phản hồi âm áp CFA, hạn chế bớt s.t.đ của CĐC1 (cỡ 50%). Do vậy điện cực hạ xuống chậm.
Khi điện cực chạm kim loại, dòng lớn nhất và điện áp bằng không (ngắn mạch làm việc). rơle dòng RD tác động, nối tắt 3R trong mạch cuộn CĐC1. s.t.đ cuộn này đổi chiềuva2 có giá trị lớn, MĐKĐ phát điện áp cấp cho động cơ Đ kéo điện cực lên nhanh (cực tính (-) điện áp cấp ở trên). Mặt khác, lúc này điot 4CL thông mạch rơle ápRA với điện áp lớn của MĐKĐ nên rơle thời gian Rth mất điện, sau thời gian duy trì, tiếp điểm thường mở mở chậm Rth sẽ đưa điện trở 9R vào mạch kích từ KTĐ của động cơ Đ để giảm từ thông và tốc độ động cơ nâng cực tăng lên. Cũng lúc này, do cực tính điện áp (-) ở trên nên 3CL không thông mạch và điện trở 7R tham gia vảo mạch cuộn phản hồi CFA, làm giảm dòng qua CFA, sự hạn chế s.t.đ cuộn CĐC1 giảm bớt (còn hạn chế cỡ 30%). Do vậy điện áp phát ra của MĐKĐ cũng tăng lên.
Điện cực rời khỏi kim loại thì HQ được mời. trong quá trình điện cực đi lên, dòng Ihq giảm và áp Uhq tăng. Hiệu điện áp lấy1 trên 4R, 5R giảm dần s.t.đ cuộn CĐC1 giảm,điện áp MĐKĐ phát ra giảm và động cơ nâng cực lên chậm dần. khi điện áp phát ra của MĐKĐ dưới ngưỡng nhã của rơle áp RA thì điện trở
59
1CD
1R1CL
RD
2CD
2CL
2K
1K2R
5R
4R
5 6 3R
TĐ
TĐ
5 6
F1 CĐC1
1 2 N
9 10 HF2 CĐC2
6R 11 12 H
3 4 N
RĐ
7R 3CL
10R
8R 4CL
CFA
MĐKĐ
RAĐ
9R
RTh
KTĐ
RThRA
+ -
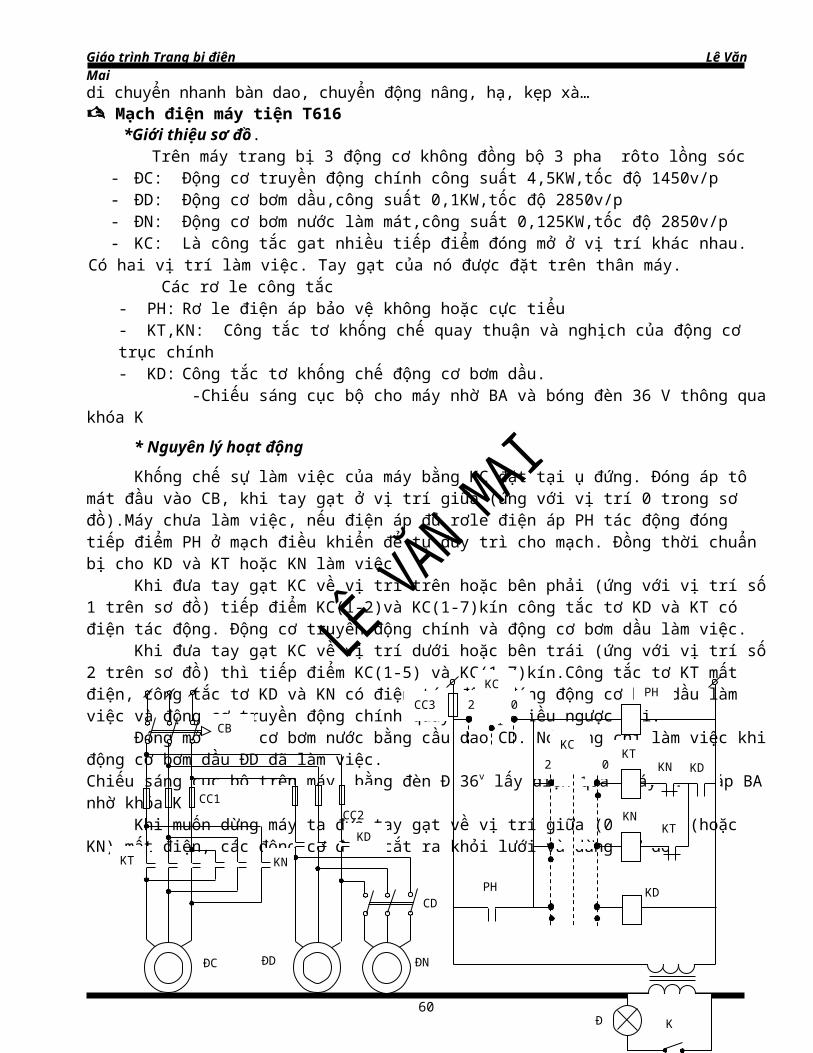
Giáo trình Trang bị điện Lê Văn Mai
9R được tách khỏi mạch kích từ D, tốc độ động cơ càng chậm. khi cân bằng, điện áp tỉ lệ với dòng HQ, rơi trên 5R và điện áp tỉ lệ với áp HQ, rơi trên 4R thì s.t.đ của CĐC1 bằng 0, điện áp MĐKĐ bằng 0, động cơ Đ dừng quay và HQ chạy ổn định.Nếu mắt ổn định, hiệu số điện áp sẽ có và cuộn CĐC1 sẽ có s.t.đ làm MĐKĐ phát điện áp chạy động cơ Đ để dịch cực. chiều và tốc độ dịch cực phụ thuộc chiều và độ lớn s.t.đ. cuộn CĐC1. nếu dòng Ihq tăng (chiều dài cung lửa giảm) thì động cơ nâng điện cực lên. Nếu dòng Ihq giảm thì ngược lại.
Khi đứt HQ ( Ihq = 0 ), quá trình diễn biến như lúc mồi HQ.Ở chế độ khống chế bằng tay, cầu dao 1CD được đóng và 2CD được mở. tay gạt ở vị trí nâng N hay
hạ H tùy yêu cầu nâng hay hạ điện cực. tác dụng cuộn CĐC2 lúc này giống như CĐC1 ở chế độ tự động.
2.3. Trang bị điện cầu trục dùng hệ F-Đ.Đối với những cầu trục có trọng tải lớn, chế độ làm việc nặng nề, yêu cầu về điều chỉnh tốc độ cao
hơn, đáp ứng các yêu cầu ngặt nghèo do công nghệ đặt ra, nếu dùng hệ truyền động với động cơ KĐB điều khiển bằng bộ khống chế động lực không đáp ứng thoã mãn các yêu cầu về truyền động và điều chỉnh tốc độ. Trong trường hợp này, thường dùng hệ truyền động F-Đ, T-Đ hoặc hệ truyền động với động cơ KĐB cấp nguồn từ bộ biến tần. Hình 8- 19 biểu diễn hệ truyền động cơ cấu nâng hạ dùng hệ F-Đ.Đây là hệ truyền động F-Đ có máy điện khuếch đại trung gian (MĐKĐ), chức năng của nó là tổng hợp và khuếch đại tín hiệu điều khiển. Hệ truyền động này được sử dụng phổ biến cho các cầu trục trong các xí nghiệp luyện kim, trong các nhà máy lắp ráp và sữa chữa.Động cơ truyền động cơ cấu nâng – hạ Đ được cấp từ nguồn máy phát F. Kích từ cho máy phát F là cuộn CKTF được cấp từ máy điện khuếch đại từ trường ngang MĐKĐ. Máy MĐKĐ có 4 cuộn kích từ:- Cuộn chủ đạo CCĐ(9) được cấp từ nguồn bên ngoài qua cầu tiếp điểm N,H (8) và N,H(10) nhằm đảo chiều dòng chủ đảo nghĩa là quyết định chiều quay (nâng hoặc hạ) cho động cơ, với điện trở hạn chế R6 - Cuộn phản hồi âm điện áp CFA(6) đấu song song với phần ứng của động cơ, gồm 2 chức năng: • Điều chỉnh tốc độ bằng cách thay đổi sức từ động sinh ra trong cuộn CFA bằng biến trở R4(6) trong trường hợp làm việc ở tốc độ thấp, tiếp điểm công tắc tơ gia tốc G(5) kín, sức từ động sinh ra trong cuộn CFA rất lớn làm giảm sức điện động tổng của máy điện khuếch đại, kết quả điện áp ra của máy phát F giảm dần đến tốc độ của động cơ giảm. • Khi dừng máy, cuộn CFA (6) được nối vào phần ứng của động cơ qua hai tiếp điểm thường kín N, H(7) và điện trở hạn chế R5(7). Do chiều của cuộn CFA ngược chiều với dòng trong cuộn CCĐ, giúp dừng nhanh động cơ truyền động.- Cuộn phản hồi âm dòng có ngắt CFD(2) hạn chế dòng khi mở máy hoặc đảo chiều. Khi động cơ chưa bị quá tải Iư < Ing, dòng ngắt Ing = (2,25 ÷ 2,5)Iđm, điện áp rơi trên điện trở shun nhỏ hơn điện áp so sánh URsh
< Uss Trong đó: URsh = Iư.Rsh (tỉ lệ với dòng điện phần ứng); Uss đặt trên R2 hoặc R3
Khi đó các van 1V hoặc 2V khoá, dòng đi qua cuộn dây CFĐ(2) rất bé (qua R1). Ngược lại, khi dòng điện trong động cơ lớn hơn giá trị Ing làm cho các van 1V hoặc 2V thông (tuỳ theo cực tính của dòng điện) sinh ra dòng trong CFA khá lớn làm giảm sức từ động của máy điện khuếch đại và hạn chế được momen của động cơ. Để nâng cao chất lượng của hệ truyền động có cuộn ổn định CÔĐ. Thực chất là cuộn phản hồi mềm điện áp của máy điện khuếch đại. Cuộn dây sơ cấp của biến áp vi phân BA được nối với đầu ra của MĐKĐ, cuộn thứ cấp được nối với cuộn dây CÔĐ. Nguyên lý hoạt động của nó như sau: Khi điện áp phát ra của MĐKĐ ổn định, dòng trong cuộn CÔĐ bằng không; nếu điện áp phát ra của máy điện khuếch đại thay đổi, trong cuộn thứ cấp của biến áp sẽ xuất hiện một sức điện động cảm ứng, làm cho dòng trong cuộn CÔĐ khác 0, chiều của dòng trong cuộn CÔĐ cùng chiều với dòng trong cuộn CCĐ nếu điện áp phát ra giảm hoặc ngược chiều với cuộn CCĐ nếu điện áp phát ra tăng, tác dụng của dòng chạy trong cuộn CCĐ sẽ làm cho điện áp phát ra của MĐKĐ ổn định.
60
Giáo trình Trang bị điện Lê Văn Mai
Điều khiển hệ truyền động bằng bộ khống chế chỉ huy kiểu cam KC, có hai vị trí nâng và hạ hàng. Đầu tiên bộ khống chế KC được đặt vào giữa, nếu đủ điện áp cấp thì RĐA(13) tác động đóng RĐA(14) để duy trì và RĐA(14,15) đóng cấp điện cho các dòng 15 đến 22. Quay bộ khống chế KC sang phải, N(15) có điện, hàng được nâng lên với tốc độ thấp nếu ở vị trí 1, ở tốc độ cao nếu ở vị trí 2 lúc này có thêm G(17) có điện làm tiếp điểm G(5) mở ra để giảm phản hồi âm áp.
Tương tự muốn hạ hàng, quay bộ khống chế KC sang trái, H(16) có điện, nếu hạ chậm thì KC ở vị trí 1, hạ nhanh ở vị trí 2.
61
Giáo trình Trang bị điện Lê Văn Mai
Khi khởi động, cần phải tăng mômen (để dễ đưa hàng ra khỏi vị trí ban đầu), ta tăng dòng kích từ của động cơ bằng cách nối tắt điện trở R7(12) nối tiếp với cuộn CKĐ và duy trì thời gian bằng các rơle thời gian RTh1 hoặc RTh2 tuỳ chế độ nâng hoặc hạ.Trong sơ đồ điều khiển có các khâu bảo vệ sau: -Bảo vệ quá dòng bằng rơle dòng điện cực đại RDC.-Bảo vệ quá điện áp bằng bằng rơle điện áp cao KĐA.-Bảo vệ điện áp “không” bằng rơle điện áp RĐA.-Bảo vệ mất từ thông bằng rơle dòng điện RTT.
2.4. Trang bị điện thang máy. 2.4.1 Đặc điểm công nghệ.
Thang máy (máy nâng) là thiết bị vận tải dùng để chở hàng và người theo phương thẳng đứng.Những loại thang máy hiện đại có kết cấu cơ khí phức tạp, hệ truyền động, hệ thống khống chế
phức tạp - nhằm nâng cao năng suất, vận hành tin cậy, an toàn. Tất cả các thiết bị điện được lắp đặt trong buồng thang và buồng máy. Buồng máy thường bố trí ở tầng trên cùng của giếng thang máy.
Một trong những yêu cầu cơ bản đối với hệ truyền động thang máy là phải đảm bảo cho buồng thang chuyển động êm. Buồng thang chuyển động êm hay không, phụ thuộc vào gia tốc khi mở máy và hãm máy. Các tham số chính đặc trưng cho chế độ làm việc của thang máy là: tốc độ di chuyển v(m/s), gia tốc a(m/s2) và độ giật ρ(m/s3).
Tốc độ di chuyển của buồng thang quyết định năng suất của thang máy, có ý nghĩa quan trọng, nhất là đối với các nhà cao tầng.
Trong truyền động của thang máy người ta sử dụng một đối trọng nối với buồng thang bằng các sợi cáp, mục đích để động cơ luôn làm việc ở chế độ động cơ và giảm lực căng của cáp, tăng độ an toàn.Buồng thang có trang bị bộ phanh bảo hiểm, mục đích để giữ buồng thang tại chỗ khi đứt cáp, mất điện và khi tốc độ di chuyển vượt quá (20÷40)% tốc độ định mức. Ngoài ra một số thang máy còn trang bị bộ phận phanh hãm làm việc theo nguyên tắc: khi động cơ Đ kéo buồng thang chưa có điện thì phanh hãm kẹp chặt trục động cơ. Khi động cơ Đ có điện thì phanh hãm giải phóng trục động cơ để cho buồng thang di chuyển.
Bố trí các nút ấn trên thang máy: Ở mỗi cửa tầng có nút ấn gọi tầng, bên trong buồng thang có các nút ấn đến tầng.
2.4.2. Hệ thống tự động khống chế thang máy tốc độ trung bìnhHệ thống truyền động điện dùng cho thang máy tốc độ trung bình thường là hệ truyền động xoay
chiều với động cơ không đồng bộ 2 cấp tốc độ. Hệ này đảm bảo dừng chính xác cao, thực hiện bằng cách chuyển tốc độ của động cơ xuống thấp (Vo) trước khi buồng thang sắp đến sàn tầng.
Cầu dao CD và áptômát Ap: Đóng nguồn cung cấp cho hệ truyền động.Đ: Động cơ quay buồng thang. Khi các tiếp điểm của các công tắc tơ:
N + C : Buồng thang sẽ được nâng lên với tốc độ cao. N + T : Buồng thang được nâng lên với tốc độ thấp.
H + C : Buồng thang được hạ với tốc độ cao.H + T : Buồng thang được hạ với tốc độ thấp.
NCH: Nam châm của phanh hãm điện từ. Khi công tắc tơ N hoặc H có điện sẽ làm cho NCH , phanh hãm giải phóng trục cho động cơ Đ kéo buồng thang di chuyển.
Các đèn Đ1 ÷ Đ5 là 5 đèn ở các cửa tầng. Đ6 là đèn chiếu sáng ở trong buồng thang. 1CT ÷ 5CT là các công tắc ở các cửa tầng.
Các công tắc chuyển đổi tầng 1CĐT ÷ 5CĐT có 3 vị trí, đây là các cảm biến dừng buồng thang và xác định vị trí thực của buồng thang so với các tầng. Khi buồng thang ở dưới một tầng nào thì công tắc CĐT tương ứng mà buồng thang đã đi qua được gạt về bên trái. Khi buồng thang ở trên tâng nào thì các công tắc CĐT tương ứng mà buồng thang đã đi qua được gạt về bên phải.
62
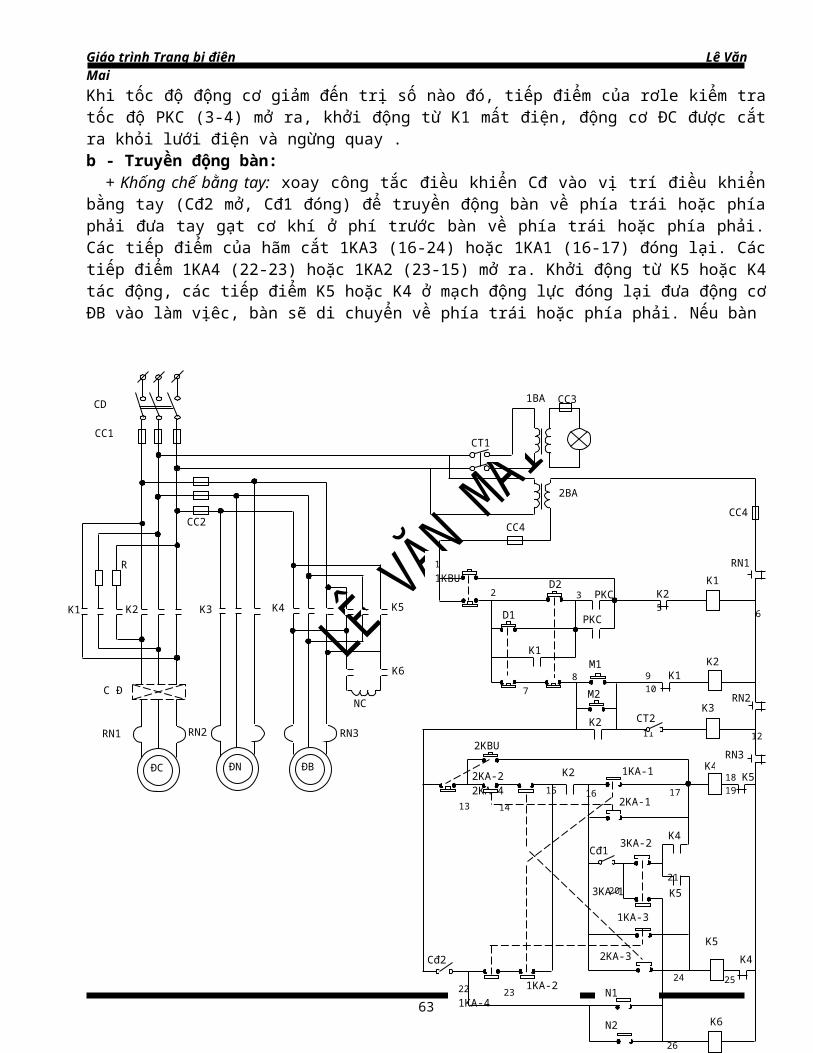
Giáo trình Trang bị điện Lê Văn Mai
Điều khiển hoạt động của thang máy được thực hiện từ hai vị trí: Tại cửa tầng bằng nút ấn gọi tầng 1GT÷5GT và trong buồng thang bằng các nút bấm đến tầng 1ĐT÷5ĐT.Để dừng buồng thang tại mỗi sàn tầng, trong sơ đồ dùng hãm cuối HC đặt trong buồng thang. HC có thể bị ấn hở ra do các chốt cơ khí đặt ở các sàn tầng hoặc khi cuộn dây NC 2 (17) sẽ hút tiếp điểm HC(14).Hãm cuối 1HC(1) và 2HC(1) liên động với sàn buồng thang. Nếu trong buồng thang có người, tiếp điểm của chúng mở ra. 1HC nối song song với công tắc cửa buồng thang CBT, nên dù 1HC mở nhưng mạch vẫn được nối liền qua CBT.
Khi có người vào trong buồng thang thì 2HC (1), làm cho cuộn dây rơle trung gian RTr (1), tiếp điểm thường kín của nó RTr làm các đèn Đ1÷Đ6 sáng lên báo hiệu buồng thang đang làm việc và chiếu sáng buồng thang. 2HC (1) cũng sẽ làm các nút ấn gọi tầng 1GT÷5GT mất tác dụng.
2PK÷5PK: Các chốt then cài cửa tầng.1PK: Được đóng bởi nam châm (cuộn dây) 1NC(16).FBH: Công tắc hành trình liên động với phanh hãm điện từ.
* Điều kiện làm việc:Thang máy chỉ được phép làm việc khi đã có đủ các điều kiện liên động:
+ 1D kín, 2D kín, 3D kín, CT kín, FBH kín.+ 1CT ÷ 5CT kín (các cửa tầng đã đóng).+ Cửa buồng thang đóng: CBT kín.
* Nguyên lý hoạt độnga) Buồng thang đang ở tầng số 1, hiện có một khách ở tầng 1 muốn lên tầng 5:
Khách vào buồng thang, các điều kiện làm việc đã đủ: tiếp điểm 2HC (1) làm cuộn dây RTr (1) -> tiếp điểm thường kín RTr -> các đèn Đ1÷Đ6 sáng lên, các nút gọi tầng mất tác dụng.Khách ấn vào nút đến tầng 5ĐT trong buồng thang -> có xung 5ĐT(2) -> cuộn dâyRT 5 (2) -> tiếp điểm RT 5 (3) -> cuộn dây C (12) -> tiếp điểm C (15) -> cuộn dây NC 2 (17) hút tiếp điểm HC(14) (đặt ở trên buồng thang) hở ra để cho tiếp điểm HC(14) không bị gạt bởi các chốt cơ khí ở các sàn tầng 1,2,3,4. Đồng thời tiếp điểm C (15) sẽ làm cho cuộn dây NC1 (16) -> hút tiếp điểm cơ khí 1PK (12) -> cuộn dây N (13) (do tiếp điểm RT 5 (20) + tiếp điểm 5CĐT đang nằm về bên trái). Kết quả ta có các công tắc tơ N + C : Động cơ quay đưa buồng thang đi lên với tốc độ cao.
Khi khách thả nút ấn 5ĐT(2) ra, cuộn dây của công tắc tơ nâng N(13) được duy trì bởi tiếp điểm T (13) + N (13). Buồng thang di chuyển nhanh qua các tầng 1,2,3,4 làm các công tắc chuyển đổi tầng 1CĐT, 2CĐT, 3CĐT, 4CĐT bị gạt về bên phải.
Khi buồng thang chạy đến gần sàn tầng số 5, nó sẽ gạt 5CĐT vào giữa, làm cho cuộn dây C (12) và cuộn dây RT 5 (2) -> tiếp điểm C (15) -> cuộn dây NC 2 (17) -> tiếp điểm cơ khí HC (14): phục hồi tiếp điểm có khí HC để chuẩn bị cho HC gạt vào chốt cơ khí ở sàn tầng 5. Đồng thời lúc này tiếp điểm thường kín C (18) -> cuộn dây công tắc tơ T (18). Kết quả các công tắc tơ sau có điện: N + T , buồng thang được nâng lên với tốc độ thấp.
Mạch duy trì lúc này là HC (14) + N (13).Khi động cơ chạy đến ngang sàn tầng 5, chốt cơ khí ở sàn tầng 5 gạt vào HC(14) làm HC (14) làm
mạch duy trì bị mất, cuộn dây N (13) -> tiếp điểm N (17) -> cuộn dây công tắc tơ T (18). Cả 2 công tắc tơ N và T đều mất điện làm động cơ Đ mất điện và phanh hãm kẹp chặt trục động cơ Đ làm động cơ Đ dừng lại.b) Buồng thang đang ở tầng số 5, hiện có một khách ở tầng 2 muốn dùng thang máy
Khách bấm nút gọi tầng 2GT, lúc này nút gọi tầng chỉ có hiệu quả khi trong thang máy không có người, do đó tiếp điểm 2HC (1).
Khi ấn 2GT(9) thì cuộn dây RT 2 (8) -> tiếp điểmRT 2 (9) -> cuộn dây C (12) ->tiếp điểm C (15) -> cuộn dây NC 2 (17) hút tiếp điểm cơ khí HC(14) (đặt ở buồng thang) hở ra để nó không gạt vào các chốt cơ khí ở các sàn tầng 5,4,3.Đồng thời tiếp điểm C (15) cũng sẽ làm cuộn dây NC1 (16) làm hút tiếp điểm1PK (12), do đó cuộn dây công tăc tơ H (14). Kết quả H + C : Buồng thang được hạ với tốc độ cao.
63
Giáo trình Trang bị điện Lê Văn Mai
Khi hành khách thả nút ấn 2GT thì mạch được duy trì bởi tiếp điểm H (14) + T (13). Buồng thang hạ nhanh qua các tầng 5,4,3 làm gạt các công tắc chuyển đổi tầng 5CĐT, 4CĐT, 3CĐT về bên trái.
Khi buồng thang gần đến sàn tầng số 2 từ phía trên làm gạt công tắc 2CĐT vào giữa, làm cho các cuộn dây C (12) + RT 2 (8), do đó tiếp điểm C (15) -> cuộn dây nam châm NC 2 (17) làm cho tiếp điểm HC(14) được phục hồi để chuẩn bị gạt vào chốt cơ khí ở tầng 2. Đồng thời tiếp điểm thường kín C (18)
64
Giáo trình Trang bị điện Lê Văn Mai
làm cho cuộn dây T (18). Kết quả là các công tắc tơ H + T : buồng thang được hạ với tốc độ thấp.Mạch duy trì lúc này là các tiếp điểm HC (14) + H (14).
Khi buồng thang hạ đến sàn tầng số 2, chốt cơ khí ở sàn tâng 2 ấn vào HC(14) làm HC (14), làm hở mạch duy trì, các công tắc tơ H và T mất điện làm động cơ Đ bị cắt điện, nam châm điện kẹp chặt trục động cơ làm buồng thang dừng lại.Khách vào buồng thang, nếu chọn đến tầng nào thì quá trình diễn ra tương tự như trường hợp đi từ tầng 1 đến tầng 5 đã phân tích ở trên.
65





























