-
8/13/2019 39-Dehbi
1/18
ASSESSMENT OF A NEW FLUENT MODEL FOR PARTICLE
DISPERSION IN TURBULENT FLOWS
A. Dehbi
Paul Scherrer Institut, Department of Nuclear Energy and
Safety,
Laboratory forThermal-hydraulics
5232 Villigen, Switzerland
Abstract
In Lagrangian particle dispersion modeling, the assumption that
turbulence is isotropic everywhereyields erroneous predictions of
particle deposition rates on walls, even in simple geometries. In
this
investigation, the stochastic particle tracking model in FLUENT
6.2 is modified to include a better
treatment of particle-turbulence interactions close to walls
where anisotropic effects are significant.
The fluid rms velocities in the boundary layer are computed
using fits of DNS data obtained in
channel flow. The new model is tested against correlations for
particle removal rates in turbulent pipe
flow and 90obends. Comparison with experimental data is much
better than with the default model.
The model is also assessed against data of particle removal in
the human mouth-throat geometry where
the flow is decidedly three dimensional. Here, the agreement
with the data is reasonable, especially in
view of the fact that the DNS fits used are those of channel
flows, for lack of better alternatives. The
CFD Best Practice Guidelines are followed to a large extent, in
particular by using multiple grid
resolutions and at least second order discretization
schemes.
703
-
8/13/2019 39-Dehbi
2/18
1. Introduction
Particle-laden turbulent flows are common place in many and
industrial, environmental and
medical applications. Examples include nuclear fission products
transport, drug delivery in human
airways, fouling in compressor and turbine blades, pollutant
control, etc. Therefore, an accurate
description of particle transport and removal in turbulent flow
fields is of great importance. Most of
the investigations of particle-turbulence interactions have
concentrated on unbounded flows whereboundary layer wall effects
are nonexistent. Comparatively, wall bounded flows have attracted
much
less attention. To a large extent, the deposition of particles
onto the walls in turbulent flows is dictated
by what happens in the boundary layer. Indeed, in many
applications, turbulence can be approximated
as being isotropic in the bulk; however, near the wall, it is
known that the turbulent velocity
fluctuations are not isotropic, and the rms of the normal
component of velocity can be orders of
magnitudes smaller than the streamwise or spanwise components.
Hence, particles in the turbulent
boundary layer are slowed considerably compared to what would be
expected if the flow field were
wholly isotropic.
Owing to the ever-increasing power of computer hardware, complex
turbulent flows in nuclear
safety applications are increasingly predicted using
Computational Fluid Dynamics (CFD) tools.
Given that fission product transport in reactor circuits is a
major safety issue, it is only fitting that the
behavior of particles also be addressed within the CFD
methodology. In widely used CFD codes such
as FLUENT [1], the turbulent dispersion of particles is
predicted using a Lagrangian-type random
walk model, while assuming turbulence is isotropic all the way
to the wall. The latter assumption leads
to large over-predictions of particle deposition rates even for
simple flows such as those in pipes or
parallel channels. In the following investigation, a model is
presented whereby the default random
walk model in FLUENT is modified to account for the anisotropic
turbulence effects in the boundary
layer.
2. Particle transport methods
There are two main families of methods to treat particle
transport in fluid flows: Eulerian and
Lagrangian. In the Eulerean or two-fluid approach, the particles
are regarded as a continuous phasefor which the conservation
equations (continuity, momentum and energy) are solved in similar
fashion
to the carrier gas flow field. The Eulerean approach is
particularly suitable for denser suspensions
when particle-particle interactions are important and the
particle feedback on the flow is too large to
ignore. The main challenge facing Eulerian-type, two-fluid
approaches resides in accurately defining
the inter-phase exchange rates and closure laws which arise from
the averaging procedures. In addition,
the strong coupling between the phases renders the Eulerean
approach quite delicate to handle,
especially at boundaries where the solid phase may be
removed.
In the second approach, called Lagrangian, the particles are
treated as a discrete phase made of
spherical particles which are dispersed in the continuous phase.
The particle volume loading is usually
assumed negligible, so that particles have no feedback effect on
the carrier gas and particle-particle
interactions are neglected. In the Lagrangian framework, the
controlling phenomena for particle
dispersion in the field are assessed using a rigorous treatment
of the forces acting on the particle. Ingeneral, the detailed flow
field is computed first, then a representatively large number of
particles are
injected in the field, and their trajectories determined by
following individual particles until they are
removed from the gas stream or leave the computational domain.
Particle motion is extracted from the
time integration of Newtons second law, in which all the
relevant forces can be incorporated (drag,
gravity, lift, thermophoretic force, etc.). The Lagrangian
approach is computationally intensive,
because it entails tracking a large number of particles until
stationary statistics are achieved. On the
704
-
8/13/2019 39-Dehbi
3/18
other hand, the results of Lagrangian particle tracking are
physically easier to interpret. Therefore, in
the following investigation, the Lagrangian methodology is used,
along with the assumption that the
dispersed phase is dilute enough not to affect the continuous
flow field (one-way coupling).
3. Particle trajectory equations
Assuming only drag is significant, the vector force balance on a
particle is written as follows:
(1)
where the drag force per unit mass may be expressed as:
(2)
In the above, u is the fluid velocity, upis the particle
velocity, the fluid dynamic viscosity, pthe particle density, dpthe
particle geometric diameter, and Re the relative Reynolds number
defined
as:
(3)
In FLUENT, the drag coefficient is obtained from the
expression:
(4)
where the as are constants which apply to spherical particles
for wide ranges of Re. The trajectory
L(Lx, Ly, Lz, t) of the particle is obtained by simply
integrating the following vector equation with
respect to time:
dt
dLup = (5)
In laminar flow, the above relations (1) to (5) are sufficient
to compute the trajectory of
individual particles, since the fluid velocity u is constant
with time for steady state problems. The
particle concentration and deposition is therefore computed in a
deterministic Lagrangian fashion, and
yields quite accurate results as shown by Healy [2]. In the
presence of significant turbulence, the
computation of particle motion becomes considerably more
complicated because of the random
velocity fluctuations which the particle faces as it is carried
away by the fluid.
4. Eddy Interaction Model in FLUENT
)( pDp
uuFdt
du=
24
Re182 D
pp
DC
dF
=
ppp uud =Re
2
321
ReRe
aaaCD ++=
705
-
8/13/2019 39-Dehbi
4/18
A popular model to describe particle dispersion in turbulent
flows is the so-called Eddy
Interaction Model (EIM) developed by Gosman and Ioannides [3]
and used in FLUENT. The EIM is
a stochastic random walk treatment in which particles are made
to interact with the instantaneous
velocity field u +u(t), where u is the mean velocity and u(t)
the fluctuating velocity. By computingthe paths of a large enough
number of particles, the effects of the fluctuating flow field can
be taken
into account. In essence, the EIM aims at reconstructing the
instantaneous field from the local mean
values of velocity and turbulent intensity.The EIM models the
turbulent dispersion of particles as a succession of interactions
between a
particle and eddies which have finite lengths and lifetimes. It
is assumed that at time to, a particle with
velocity upis captured by an eddy which moves with a velocity
composed of the mean fluid velocity,
augmented by a random instantaneous component which is piecewise
constant in time. When the
lifetime of the eddy is over or the particle crosses the eddy,
another interaction is generated with a
different eddy, and so forth. Based on the model of Gosman and
Ioannides, the eddy has the following
length and lifetime:
2/34/3)(
kCLe= (6)
kC
Le= (7)
where k and are respectively the turbulent kinetic energy and
dissipation rate, while Cs are
constants. In the Reynolds Averaged Navier Stokes (RANS)
framework, the mean velocity u is
obtained from any of the available turbulence models (k-, k-,
RSM, etc). The value of )(' tu which
prevails during the eddy lifetime is randomly drawn from a
Gaussian distribution. Hence, in
component notation, one has:
2'
1' uu = (8)
2'
2' vv = (9)
2'
3' ww = (10)
where the s are random numbers with 0 mean and unit standard
deviation, while the remainder of
the right-hand side represent the local rms values of the
velocity fluctuations. In the RANS modeling
of turbulence, the turbulent kinetic energy kis one of the
variables solved for. In the current version of
FLUENT, the fluid velocity fluctuations used for particle
tracking are assumed isotropic, and the rms
values of velocity are simply obtained from the
relationship:
3
22'2'2' kwvu === (11)
As already mentioned, and later confirmed in the results
section, relation (11) introduces a large
over-prediction for the wall normal component v in the boundary
layer, and hence a more physically
sound alternative will be developed in the next section.
706
-
8/13/2019 39-Dehbi
5/18
5. Inclusion of a boundary layer model in FLUENT
In the new treatment of particle turbulent dispersion, the
default model with the isotropic
turbulence assumption is employed as long as the particle is
outside the boundary layer, i.e. for as long
as the dimensionless particle distance to the nearest wall y+is
greater than 100 (for forced flows). If
the particle crosses inside the boundary layer, then the values
of the rms fluctuating velocities are
modified to account for the strong anisotropic nature of
turbulence. Ideally, the rms values shouldcome from experimental or
DNS data for the particular geometry and Reynolds number. In the
current
implementation, DNS fits for channel flow (Re=13000) obtained by
Dreeben et. al [4] are used for
both the rms velocities and turbulence dissipation rate:
496.1*
2'
)(0239.01
40.0'
+
++
+
==
y
y
u
uu (12)
421.2
2
*
2'
)(00140.0203.01
)(0116.0'
++
++
++
==
yy
y
u
vv (13)
322.1*
2'
)(0361.0119.0 +
+
+
+==yy
uww (14)
5.075.14* )(768.0)(0116.0529.4
1
)( ++
+
++==
yyu
(15)
where u* is the friction velocity and the fluid kinematic
viscosity. The above represent the rms
values for the streamwise, wall normal and spanwise direction,
respectively. Although these fits are
not universal, they are found to be only slightly dependant on
the Reynolds number for predominantly
two dimensional flows [5], and should therefore provide better
results than the default isotropic model.
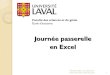
The rms values of velocity are plotted in Figure 1.
In the new FLUENT model, the boundary layer modifications are
made general enough so that
highly 3D flows can also be tackled. Hence, at any instant
during the trajectory integration inside theboundary layer, the
particle distance from the nearest wall (y+) is computed, as is the
normal,
streamwise, and spanwise unit vectors at the particle location.
This information allows the correct
assignment of the component fluctuating component velocities in
equations (12) through (14), by first
computing these values in the local particle-wall coordinate
system which varies with particle location,
then transforming theses values back to the fixed computational
coordinate system.
The time integration of the trajectory equations becomes
complicated very near to the wall,
because the eddy lifetime (equation (7)) tends to zero, and
hence very small time steps are necessary.
A lower limit on the eddy lifetime is prescribed to avoid having
to deal with extremely small times
steps. That is:
)10,
10
),7(max(7sequation
p
e
=
(16)
707
-
8/13/2019 39-Dehbi
6/18
1E-3 0.01 0.1 1 10 100
1E-5
1E-4
1E-3
0.01
0.1
1
+'w
+'v
+'u
Dimensionlessrmsvelocity.-
y+
Figure 1: rms values of velocity in the boundary layer
where pis the particle relaxation time representing a typical
response time to changes in the carrier
fluid. It is defined as:
18
2
ppc
p
dC= (17)
where pand dpare the particle density and diameter,
respectively, is the carrier fluid viscosity, and
Ccis the Cunningham correction slip factor which is very close
to one for particles above 1 m (those
considered here). The integration time step is accordingly
chosen to be one tenth of the eddy lifetime.
Experimentation with smaller time steps did not show any
difference in the particle deposition results.
6. Results
In the following section, the assessment of the new turbulent
dispersion model is given for three
different cases where experimental data on particle deposition
is available: pipe flow, 90obend flow,
and a complex three dimensional internal flow. CFD Best Practice
Guidelines are used to the extent
possible. In particular, the solution is determined for meshes
with different resolutions to insure gridindependence, and higher
order schemes are consistently used. In addition, all computations
are
performed in double precision.
6.1 Pipe Flow
6.1.1 Comparison to experiments
708
-
8/13/2019 39-Dehbi
7/18
The deposition of particles in turbulent vertical pipe flows has
been experimentally studied by a
number of authors. A good test for the new model is achieved by
comparing its predictions to the well
known experiments by Liu and Agarwal [6]. The latter authors
measured the deposition of 1.4 to 21
m diameter olive oil particles injected in a vertical glass pipe
of diameter 1.27 cm and length 1 m.
Deposition data is presented for the portion of the pipe section
between 0.25 m and 0.75 m, i.e. in the
region where the flow is fully developed and far enough from the
exit. Two sets of mean gas velocitiesare used, i.e. 12 m/s and 62
m/s, which correspond to Reynolds numbers of approximately 10000
and
50000, respectively. The Liu and Agarwal correlation is stated
as follows:
20006.0 ++ = pV for 13+
p (18)
1.0=+V for 13+p (19)
where V+is the particle deposition velocity scaled by the
friction velocity. No uncertainty is given, but
the data is within 30% of the values given by the
correlation.
In this first simulation, two sets of 3D hexahedral meshes are
generated. The second, finer mesh
is obtained from the coarse mesh by simply spitting all cells
except the ones adjacent to the wall into 2
in all directions, yielding 8 finer cells for any coarse cell.
Because of the simple geometry and flow,the standard k-model is
used, along with standard wall functions. The boundary conditions
are a flat
velocity profile at the inlet and a zero gauge pressure at
outlet. After convergence with 1st order
schemes is achieved, second order, then finally third order
MUSCL schemes are used for all equations.
The convergence is judged by monitoring the scaled residuals
along with the mean wall shear stress.
To judge convergence, FLUENT recommends a scaled residual of at
least 10-3on all variables, while
simultaneously reaching stationary, iteration-independent values
for some key global flow parameters
(here the wall shear stress). The computation is stopped after
both of these criteria are achieved. The
summary of the simulations for both Reynolds numbers is shown in
Tables 2 and 3. Convergence and
grid independence of the results are reached.
Coarse grid fine grid
Number of cells 61800 352000
Mean aspect ratio 1.1 1.1
Discretization
Scheme3rdorder MUSCL 3rdorder MUSCL
Maximum scaled
residual3.10-7 4.10-7
Mean wall y+ 30.1 30.1
Mean wall shear
stress, Pa
0.672 0.679
Table 2: Summary information for Re=10000
Coarse grid fine grid
709
-
8/13/2019 39-Dehbi
8/18
Number of cells 61800 352000
Mean aspect ratio 1.1 1.1
Discretization
Scheme
3rd
order MUSCL 3rd
order MUSCL
Maximum scaled
residual3.10
-7 6.10
-7
Mean wall y+ 135.3 129.4
Mean wall shear
stress, Pa11.91 12.00
Table 2: Summary information for Re=50000
Particle tracking is performed by releasing a large number of
unit density particles which are
uniformly distributed over the flow area 0.25 m downstream of
the inlet. The particles are assigned the
gas velocity at the time of release. Deposition over the next
0.5 m is monitored in order the replicatethe conditions of the
test. The number of particles chosen is 10000, as preliminary
simulation with
larger numbers of particles showed no change in the deposition
rate beyond 5000 particles. The results
of the simulations are shown in Figures 2 and 3. Several remarks
can be made: first the default model
gives totally erroneous predictions of the particle deposition
rates, especially for the smaller particles.
Given the simple geometry involved, one can justifiably conclude
that the default turbulent dispersion
model should not be used in wall bounded flows. On the other
hand, the new model predicts
reasonably well both the trends and the magnitude of deposition.
For the smallest particles, the model
over-predicts deposition rates. This feature is inherent to
random walk models which produce the so-
called spurious drift [7], i.e. preferential clustering of
almost massless particles in low turbulence
regions very close the walls. For fission product transport
applications, particles are typically larger
and hence the model deficiency should not have significant
effects.
0 10 20 30 40 50
0
10
20
30
40
50
60
70
80 Default model in
FLUENT
Pipe flow conditions:
- Pipe diameter=0.0127 m
- Deposition length=0.5 m
- Inlet velocity =12 m/s
- Re= 10000Particlefractionremoved,
%
Particle diameter, micron
Liu correlation
Model
Figure 2: Particle deposition at Re=10000
710
-
8/13/2019 39-Dehbi
9/18
0 5 10 15 20
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Pipe flow conditions:
- Pipe diameter=0.0127 m
- Deposition length=0.5 m
- Inlet velocity =62 m/s
- Re= 50000Particlefractionrem
oved,
%
Particle diameter, micron
Liu-Agarwal Correlation
New Model in FLUENT
Default model in
FLUENT
Figure 3: Particle deposition at Re=50000
6.1.2 Effect of mesh aspect ratio
To save computational resources, high aspect ratio meshes are
usually used in regions where the
flow details are unimportant, or else in the boundary layers. In
the latter case, meshes with aspect
ratios of order 50-100 are commonly used, with no detrimental
effect on the flow field accuracy. In
particle tracking computations, interpolation is heavily
employed, because particle position rarely
coincides with the nodes. To see the effect of a moderately high
aspect ratio, particle tracking
simulations were conducted on the 50000 Reynolds number case
addressed earlier. As in the previous
simulations, the mesh consists of hexahedral cells, but the mean
aspect ratio is 44 this time. The
summary of the simulation is given in Tables 4.
Base case mesh Stretched mesh
Number of cells 61800 1870
Mean aspect ratio 1.1 44
Discretization
Scheme3rdorder MUSCL 3rdorder MUSCL
Maximum scaled
residual3.10-7 1.10-9
Mean wall y+ 135.3 128.1
Mean wall shear
stress, Pa11.91 11.93
Table 4: Effect of high aspect ratio mesh
711
-
8/13/2019 39-Dehbi
10/18
As expected, the results for the stretched mesh are almost
identical to those for the regular mesh,
despite a cell count which is 30 smaller.
The particle tracking results are shown in Figure 4. With the
high aspect ratio mesh, the
agreement with the data is not as good as with the base case
over most of the particle size range.
Because of the considerable interpolation involved in computing
particle trajectories, it is best tomaintain a low aspect ratio
even in boundary layer flows. One therefore should be cautious not
to
consider particle tracking as a mere post-processing computation
performed on a grid independent
flow field.
0 5 10 15 20
0
10
20
30
40
50
60
70
80
Re= 50000Particlefractionr
emoved,
%
Particle diameter, micron
Liu correlation
Aspect ratio 1.1
Aspect ratio 44
Figure 4: Effect of mesh aspect ratio
6.2 Turbulent deposition in 90obends
Studies of deposition in bends have largely concentrated on
laminar flow. To the best of the
authors knowledge, the only experimental work performed in
turbulent conditions is due to Pui
et al. [8] who measured the penetration of particles through
bends with diameters on the order of one
centimeter. The authors provided the following correlation for
the best fit through their data:
)823.2exp( == StkC
C
in
out (20)
where the Cs are the inlet and outlet aerosol concentrations,
respectively, the bend angle in radians,
and Stkthe particle Stokes numbers defined as:
D
UStk
p= (21)
in which U is the mean gas velocity in the pipe, D is the pipe
diameter, and pthe particle relaxation
time earlier. Again no specific uncertainty is given, but the
data is enveloped by the correlation within
712
-
8/13/2019 39-Dehbi
11/18
a 30% band. A generic90obend section with 2 cm diameter is
modeled (see Figure 5). The domain
includes a straight inlet pipe with a 5 diameter developing
length (in grey), as well as an exit straight
section with 5 diameter length. A 10 m/s velocity boundary
condition (Re=13000) is imposed at the
inlet, and a 0 gauge pressure is imposed at the exit.
Figure 5: A view of the 90obend section
Two hexahedral meshes are employed: a coarse mesh with 19400
cells and a fine mesh of 123000
cells. The finer mesh is obtained from the coarse mesh by
halving each coarse cell direction. The cells
adjacent to the walls are preserved from this procedure to
maintain the y+ at approximately the same
values for both meshes. The k- turbulence model with standard
wall functions is used, since it
usually performs better thank-in curved domains. The details of
the computational case are shown
in Table 5 below.
Sample velocity profiles are taken along a vertical line
parallel to the Z axis (see Figure 5) which
is parallel to the exit pipe. This line cuts through the
symmetry plane somewhere close to the mid
section of the bend. Profiles for the X velocity (X is parallel
to the entrance pipe section) and Z
velocity are shown in Figures 6 and 7 for both meshes. From the
mean values of the shear stress as
well as sample velocity profiles, one can confidently state that
the computed flow is grid independent.
713
-
8/13/2019 39-Dehbi
12/18
Coarse grid Fine grid
Number of cells 19400 123300
Mean aspect ratio 1.2 1.2
Discretization
Scheme3
rdorder MUSCL 3
rdorder MUSCL
Maximum scaled
residual1.10
-9 3.10
-9
Mean wall y+ 29.1 29.1
Mean wall shear
stress, Pa 11.91 11.93
Table 5: Summary information for bend flow case
-0.045 -0.040 -0.035 -0.030 -0.025 -0.020 -0.015 -0.010
0
2
4
6
8
10
Xveloc
ity,m/s
Distance along line, m
Coarse grid
Fine grid
Figure 6: X velocity profile along a vertical line
714
-
8/13/2019 39-Dehbi
13/18
-0.045 -0.040 -0.035 -0.030 -0.025 -0.020 -0.015 -0.010
0
2
4
6
8
10
Zvelocity,m/s
Distance along line, m
Coarse grid
Fine grid
Figure 7: Z velocity profile along a vertical line
Particle tracking is conducted by releasing 10000 particles from
the face which represents the
entrance of the bend. Particles are uniformly distributed over
the face. Comparison between the
correlation and both the default and new FLUENT models is shown
in Figure 8:
0 5 10 15 20 25 30
0
20
40
60
80
100
Particlefractionr
emoved,
%
Particle diameter, micron
Pui correlation
New modelDefault model
Figure 7: Particle deposition in 90obend
As can be seen, the agreement with the data is quite good for
the new model, and acceptable forthe default model in FLUENT. The
reasonable accuracy of the default model should however be
tempered by the fact that inertial impaction is dominant over
turbulent impaction for most of the
particle range simulated. It can also be seen that in the lower
range of particle sizes where inertia
effects decrease, the new model offers better prediction thanks
to the better modeling of the turbulent
field in the boundary layer.
715
-
8/13/2019 39-Dehbi
14/18
6.3 Mouth Throat Geometry
One can find only scarce data relating to particle deposition in
complex three dimensional
turbulent flows. Among the available data is information
relative to medical aerosol removal rates in
the human extrathoracic region encompassing the mouth, the
pharynx, the larynx and the trachea.
Aerosol deposition in those regions is unwarranted because the
medication is meant for the lungswhich are located further
downstream. Good quality, albeit limited data was recently provided
by
Grigic et. al [9] who measured the removal of 3 m, 5 m and 6.5 m
DEHS oil particles in an
idealized mouth-throat geometry. The latter was constructed from
tomographic scans of many adult
patients with no apparent abnormalities [10] (see Figure 9).
Grigic et al. used two distinct flow rates,
i.e. 30 and 90 l/min. For 30 l/min, the flow is laminar or
transitional. For 90 l/min, the flow is in the
turbulent range, with a Reynolds number on the order of 8000
based on the entrance diameter of
17 mm. Therefore, the particle tracking model is compared
against the 90 l/min data.
Figure 9: Mouth-throat idealized geometry
Because of the complicated 3D geometry, a full tetrahedral mesh
is used. The original mesh has
1.1 millions cells with a mean aspect ratio of 1.2. The cell
count is relatively high in order to be able to
resolve the boundary layer such that the low Reynolds number
k-transitional flow model can be used.
For theses conditions, it is required that the wall y+ be of
order 1, although higher values are
acceptable as long as they are within the viscous sublayer, i.e.
y+ less than 5. A full grid-independence
study would require running a case with close to 9 million
cells, clearly outside the scope of this study.
716
-
8/13/2019 39-Dehbi
15/18
Nonetheless, grid adaptation is performed to yield a finer grid
with 2 million cells. When the solution
on the latter is converged, a further adaptation produces the
finest grid with 3.3 million cells. The
particular adaptation procedure aims at providing higher cell
resolution in regions with high velocity
gradients, all the while preserving the wall y+. A flat velocity
profile is imposed on the inlet face of a
short 17 mm diameter pipe which provides a fully developed flow
into the mouth-throat section. A 0
gauge pressure is imposed on the exit face.
Coarse grid Finer grid Finest grid
Number of cells 1.1 million 2.0 million 3.3 million
Mean aspect ratio 1.2 1.2 1.2
Discretization
Scheme2ndorder Upwind 2ndorder Upwind 2ndorder Upwind
Maximum scaled
residual6.10
-5 3.10
-4 4.10
-4
Mean wall y+ 3.72 3.57 3.57
Mean wall shear
stress, Pa 0.83 0.80 0.80
Table 6: Summary information for the mouth-throat case
A slanted line SL (see Figure 10) where the gradients are high
is chosen in the symmetry plane to
look at the X and Z (vertical) velocity profiles. The x and z
velocity profiles are shown in Figures 11
and 12. The computation for the coarse grid is clearly not yet
grid independent. The profiles for the
finer and finest grids are nearly the same, in particular near
the boundaries where it is especiallyimportant to have grid
independence to ensure the accuracy of the particle deposition
prediction. It
would however be beneficial to increase the grid resolution even
further to resolve the slight
discrepancies which exist between the fine and finest grids in
this study.
Particle tracking is performed in the finest grid with 10000
particles injected at the entrance face
of the short conditioning inlet pipe. Results for the deposition
fraction are shown in Table 7. As seen
before, the default model largely over-predicts the deposition
for all particle sizes. The new model
predicts deposition rates that are within 30% of the data, which
is reasonable, especially in view of the
fact that the DNS fits are those of channel flows, for lack of
better alternatives.
717
-
8/13/2019 39-Dehbi
16/18
Figure 10: Slanted line (SL) along which velocity components are
displayed
-0.090 -0.085 -0.080 -0.075 -0.070 -0.065
-2
0
2
4
6
8
10
12
14
Xvelocity,m/s
Vertical Z distance, m
1.1 million cells
2.0 million cells
3.3 million cells
Figure 11: X velocity profile along slanted line SL
718
-
8/13/2019 39-Dehbi
17/18
-0.090 -0.085 -0.080 -0.075 -0.070 -0.065
-2
0
2
4
6
8
10
12
14
16
Zvelocity,m/s
Vertical Z distance, m
1.1 million cells
2.0 million cells
3.3 million cells
Figure 12: Z velocity profile along slanted line SL
Particle diameter, m Grgric dataFLUENT
new model
FLUENT
default model
3.0 34 5 39.0 91.0
5.0 70 3 48.2 94.8
6.5 80 3 61.4 97.8
Table 7: Deposition fraction (%) in the idealized mouth-throat
geometry
7 Conclusion
A model is implemented in the FLUENT particle tracking facility
in order to specifically address
boundary layer phenomena, and in particular the strong
anisotropic nature of turbulence near walls.
The flow field is first obtained for 2D and 3D cases using CFD
Best Practice Guidelines, in particularmultiple grid resolutions
and higher order schemes. Particle tracking is then performed on
the
converged, grid-independent solutions. Comparison with
experimental particle deposition rates in
both 2D and 3D turbulent flows shows marked improvement over the
default turbulent dispersion
model.
719
-
8/13/2019 39-Dehbi
18/18
8. References
[1] FLUENT, FLUENT 6.2 Users Guide (2005) Lebanon, USA.
[2] Healy, D.P., Young, J.B., 2001. Calculation of inertial
particle transport using the Osiptsov
Lagrangian method. 4th Int. Conf. on Multiphase Flow, New
Orleans, Paper DJ4.
[3] Gosman, A.D. and Ioannides, E., 1983. Aspects of computer
simulation of liquid fuelled
combustors. J. Energy 7, pp. 482490.
[4] Dreeben, T.D., Pope, S.B., 1997. Probability density
function and Reynolds-stress modeling of
near-wall turbulent flows. Phys. Fluids, 9 (1), 154-163.
[5] Antonia, R.A., Teitel, M., Kim, J., Browne, L.W.B., 1992.
Low-Reynolds-number effects in a fully
developed turbulent channel flow. J. Fluid Mech. 236,
579-605.
[6] Liu, B.Y.H. and Agarwal, J.K., 1974. Experimental
observation of aerosol deposition in
turbulent flow. Aerosol Sci. 5,145155.
[7] MacInnes, J.M. and Bracco, F.V., 1992. Stochastic particle
dispersion modeling and the tracer
particle limit. Phys. Fluids A 4, pp. 28092824.
[8] Pui, D.Y.H, Romay-Novas, F., and Liu B.Y. H. Experimental
study of particle deposition in bends
of circular cross section. Aerosol Science and Technology, 7,
301-315.
[9] Grgic, B., Finlay, W.H. and Heenan, A.F., 2004. Regional
aerosol deposition and flow
measurements in an idealized mouth and throat. Journal of
Aerosol Science 35, 2132.
[10] DeHaan, W. H. & Finlay, W. H. 2001. In Vitro
Monodisperse Aerosol Deposition in a Mouth and
Throat with Six Different Inhalation Devices, J. Aerosol Med.
14, 361-367.
Acknowledgement
The author wishes to express his gratitude to Professor W.
Finlay of the University of Alberta
for making available the CAD files of the mouth-throat
geometry.
720







![pag1 - ro-binet.ro · 39 48 39 48 39 48 39 48 39 48 39 48 39 48 39 48 39 48 39 48 [mm] 52 65 52 65 52 65 52 65 ... Robinetul cu sferä pentru pompe este montat În partea frontalä](https://img.pdfslide.tips/doc/110x75/5fd7a74408caf22bc725b8cb/pag1-ro-binetro-39-48-39-48-39-48-39-48-39-48-39-48-39-48-39-48-39-48-39-48-mm.jpg)