Embed Size (px)
DESCRIPTION
feffwfewfwefewewf
Citation preview
UNIVERZITET U KRAGUJEVCU
TEHNIĈKI FAKULTET ĈAĈAK
SEMINARSKI RAD
PROGRAMSKO UPRAVLJANJE
MAŠINAMA ALATKAMA
Profesor: Studenti:
Prof.dr. Radomir Slavković Milan Nikolić 1065/08
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 2 -
Sadržaj:
I UVOD ........................................................................................................................... 3
II METODE UPRAVLJANJA MAŠINAMA ALATKAMA ...................................... 4
2.1 Ručno upravljanje mašinama alatkama ........................................................... 4
2.2 Automatsko upravljanje mašinama alatkama .................................................. 5
III SISTEMI AUTOMATSKOG UPRAVLJANJA ................................................... 6
IV SISTEMI PROGRAMSKOG UPRAVLJANJA ................................................... 10
4.1 Mehanički sistemi sa upravljačkim vratilom .......................................... 10
4.1.1 Mehanički sistemi sa UV const. brzine ..................................... 10
4.1.2 Mehanički sistemi sa UV prom. brzine ..................................... 11
4.1.3 Mehanički sistemi sa pomoćnim vratilom ................................. 12
4.2 Sistemi cikličnog upravljanja ( SCU ) ...................................................... 14
4.3 Sistemi kopirnog upravljanja ( SKU ) ..................................................... 17
4.4 Sistemi numeričkog upravljanja ( NC ) ................................................... 19
V NIVOI NUMERIĈKOG UPRAVLJANJA ..................................................... 29
5.1 Konvencionalno numeričko upravljanje .................................................. 29
5.2 Kompjuterizovano numeričko upravljanje .............................................. 30
5.3 Direktno numeričko upravljanje .............................................................. 37
VI ELEMENTI TEHNIKE NUMERIĈKOG UPRAVLJANJA ........................ 41
VII PRIMENA SISTEMA NC UPRAVLJANJA KOD MAŠINA ALATKI........ 52
VIII PRIMENA TEHNOLOGIJE NUMERIĈKOG UPRAVLJANJA ............... 53
IX PRIMER IZRADE PROGRAMA..................................................................... 55
X ZAKLJKUĈAK ................................................................................................. 56
XI LITERATURA ................................................................................................. 57
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 3 -
I UVOD
Ljudska vrsta je od samog svog nastanka evoluirala u pravcu svesnih, misaonih bića, koja
koriste razna oruĎa kako bi lakše zadovoljila neku ţivotnu potrebu. Počevši od štapa kojim se lakše
dohvatalo voće i kamena kojim se lovilo, preko nastanka prvih višedelnih oruţja, naši preci su prešli
veoma dug put do današnjih savremenih mašina i alata.
Potreba da se nekim sredstvom olakša ţivot dovela je do niza fundamentalnih otkrića – točka,
kose ravni, hidrauličnih sklopova, elektronskih komponenti itd, što je omogućilo ogroman napredak u
razvoju kompleksnih mašina.
Prve mašine su nastale usloţavanjem ručnih alata, pa je upravljanje njima bio više fizički nego
intelektualni posao. Kako su se mašine razvijale, tako se i način upravljanja menjao. Izraz “mašina
alatka”, koji generalno označava mašine koje obraĎuju neki materijal zamenjujući ručni alat, dolazi
upravo iz opisa namene tih mašina.
Sa početkom upotrebe ureĎaja za automatsko upravljanje mašinama alatkama, mnoge mašine
dobijaju nove mogućnosti, novi izgled i proizvodne osobine. Smanjuje se fizičko učešće čoveka u
proizvodnji i negativni uticaji ljudskog faktora na upravljanje mašinama, a povećava proizvodnost,
repetitivnost i ekonomičnost. Upotrebom raznovrsnih medija, kojima se saopštava odreĎeni program
ureĎajima za automatsko upravljanje mašinom alatkom postiţe se veća tačnost izrade, ujednačenost
izraĎenih komada, dok se troškovi proizvodnje po jedinici proizvoda smanjuju.
U poslednjih trideset godina došlo je do značajnih promena kako u mašinogradnji, tako i u
upravljanju mašinama. UvoĎenjem računara u upravljačke procese dobijena je nova vrsta super
produktivnih mašina, tzv. CNC odnosno mašina sa kompjuterskim numeričkim upravljanjem.
CNC mašine kontroliše računar, na osnovu programa koji zadaje čovek odgovarajućim
programima ili komandama. Karakterišu se velikom proizvodnošću, preciznim radom, velikim brojem
radnih funkcija i dobrim repetitivnim osobinama.
U ovom radu biće izloţene razne metode upravljanja mašinama alatkama.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 4 -
II METODE UPRAVLJANJA MAŠINAMA ALATKAMA
2.1 RUĈNO UPRAVLJANJE MAŠINAMA ALATKAMA
Ručno upravljanje mašinama alatkama generalno gledano podrazumeva upravljanje mašinom
koje ostvaruje radnik fizičkim delovanjem na upravljačke delove mašine. Radnik najčešće rukama
pomera odreĎene elemente mašine u toku rada, pa je tako i nastao izraz “ručno upravljanje”.
Pri ovakvom upravljanju, neophodna je stručna osposobljenost radnika za rad na odreĎenoj
mašini, poznavanje tehnoloških procesa obrade, kao i opšte tehničko znanje u smislu pravilnog
korišćenja proizvodne dokumentacije ( radioničkih crteţa, izradnih listi itd. ). Prateći tehnički crteţ,
radnik upravlja mašinom, menja alate i način stezanja obradka u cilju dobijanja izradka propisanih
dimenzija i kvaliteta.
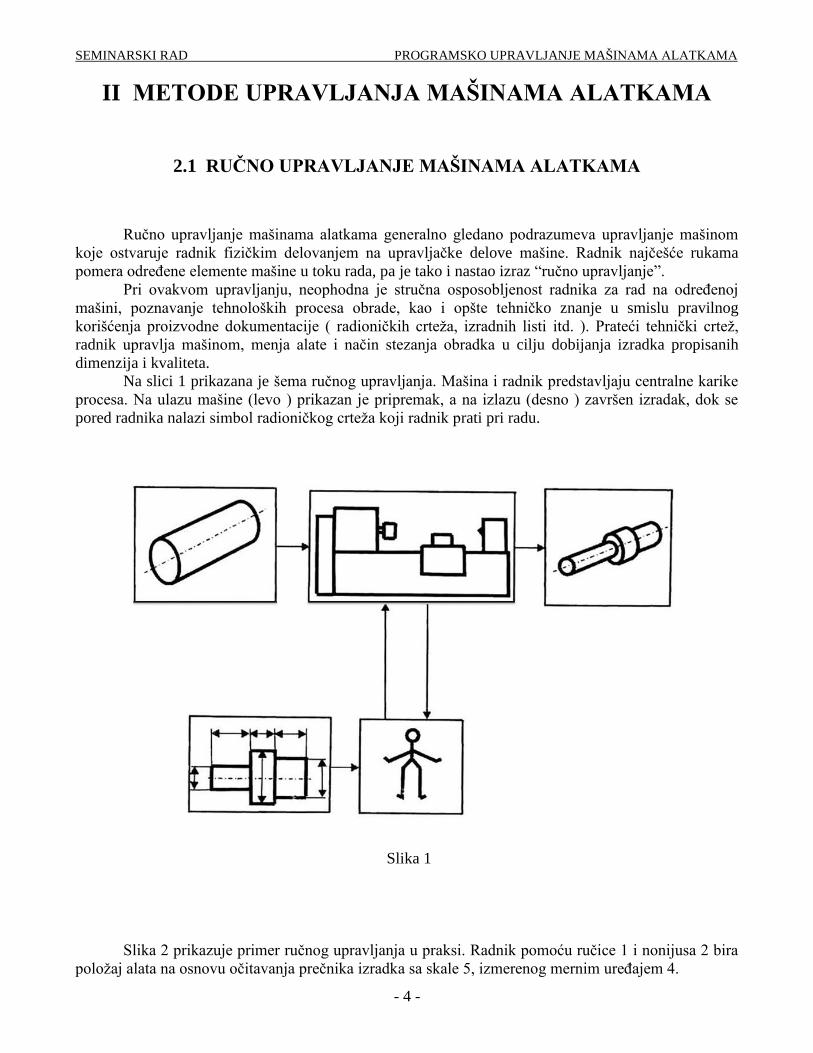
Na slici 1 prikazana je šema ručnog upravljanja. Mašina i radnik predstavljaju centralne karike
procesa. Na ulazu mašine (levo ) prikazan je pripremak, a na izlazu (desno ) završen izradak, dok se
pored radnika nalazi simbol radioničkog crteţa koji radnik prati pri radu.
Slika 1
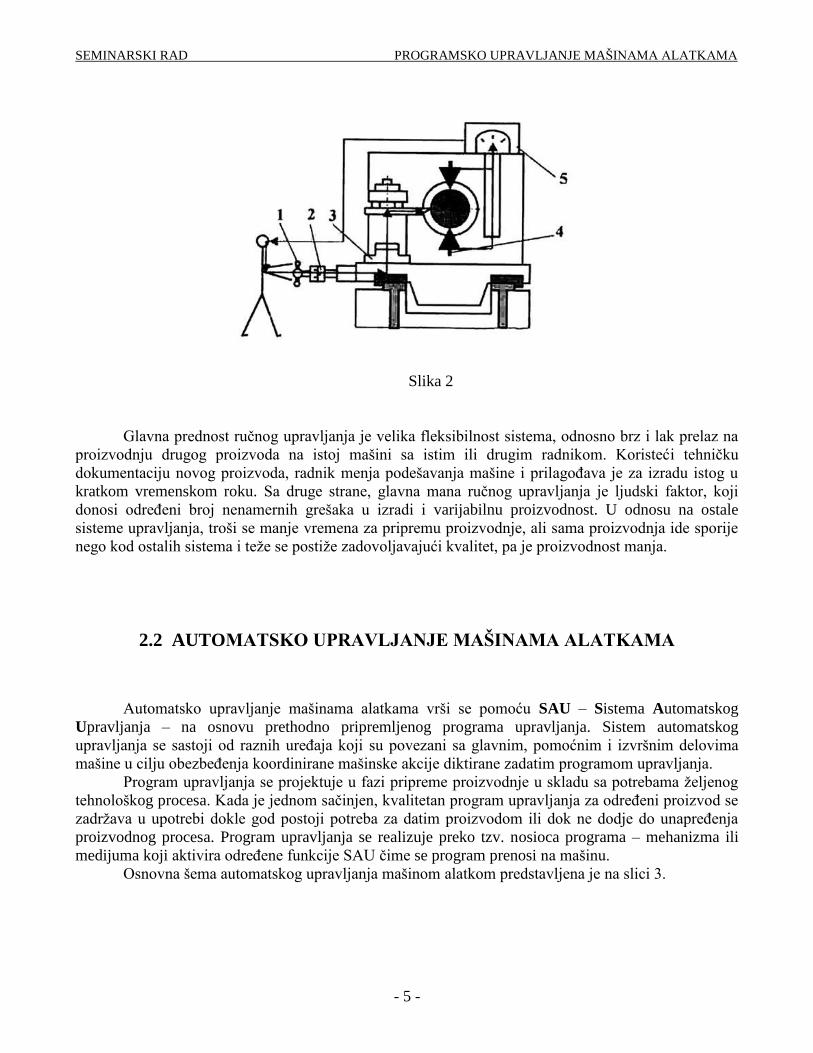
Slika 2 prikazuje primer ručnog upravljanja u praksi. Radnik pomoću ručice 1 i nonijusa 2 bira
poloţaj alata na osnovu očitavanja prečnika izradka sa skale 5, izmerenog mernim ureĎajem 4.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 5 -
Slika 2
Glavna prednost ručnog upravljanja je velika fleksibilnost sistema, odnosno brz i lak prelaz na
proizvodnju drugog proizvoda na istoj mašini sa istim ili drugim radnikom. Koristeći tehničku
dokumentaciju novog proizvoda, radnik menja podešavanja mašine i prilagoĎava je za izradu istog u
kratkom vremenskom roku. Sa druge strane, glavna mana ručnog upravljanja je ljudski faktor, koji
donosi odreĎeni broj nenamernih grešaka u izradi i varijabilnu proizvodnost. U odnosu na ostale
sisteme upravljanja, troši se manje vremena za pripremu proizvodnje, ali sama proizvodnja ide sporije
nego kod ostalih sistema i teţe se postiţe zadovoljavajući kvalitet, pa je proizvodnost manja.
2.2 AUTOMATSKO UPRAVLJANJE MAŠINAMA ALATKAMA
Automatsko upravljanje mašinama alatkama vrši se pomoću SAU – Sistema Automatskog
Upravljanja – na osnovu prethodno pripremljenog programa upravljanja. Sistem automatskog
upravljanja se sastoji od raznih ureĎaja koji su povezani sa glavnim, pomoćnim i izvršnim delovima
mašine u cilju obezbeĎenja koordinirane mašinske akcije diktirane zadatim programom upravljanja.
Program upravljanja se projektuje u fazi pripreme proizvodnje u skladu sa potrebama ţeljenog
tehnološkog procesa. Kada je jednom sačinjen, kvalitetan program upravljanja za odreĎeni proizvod se
zadrţava u upotrebi dokle god postoji potreba za datim proizvodom ili dok ne dodje do unapreĎenja
proizvodnog procesa. Program upravljanja se realizuje preko tzv. nosioca programa – mehanizma ili
medijuma koji aktivira odreĎene funkcije SAU čime se program prenosi na mašinu.
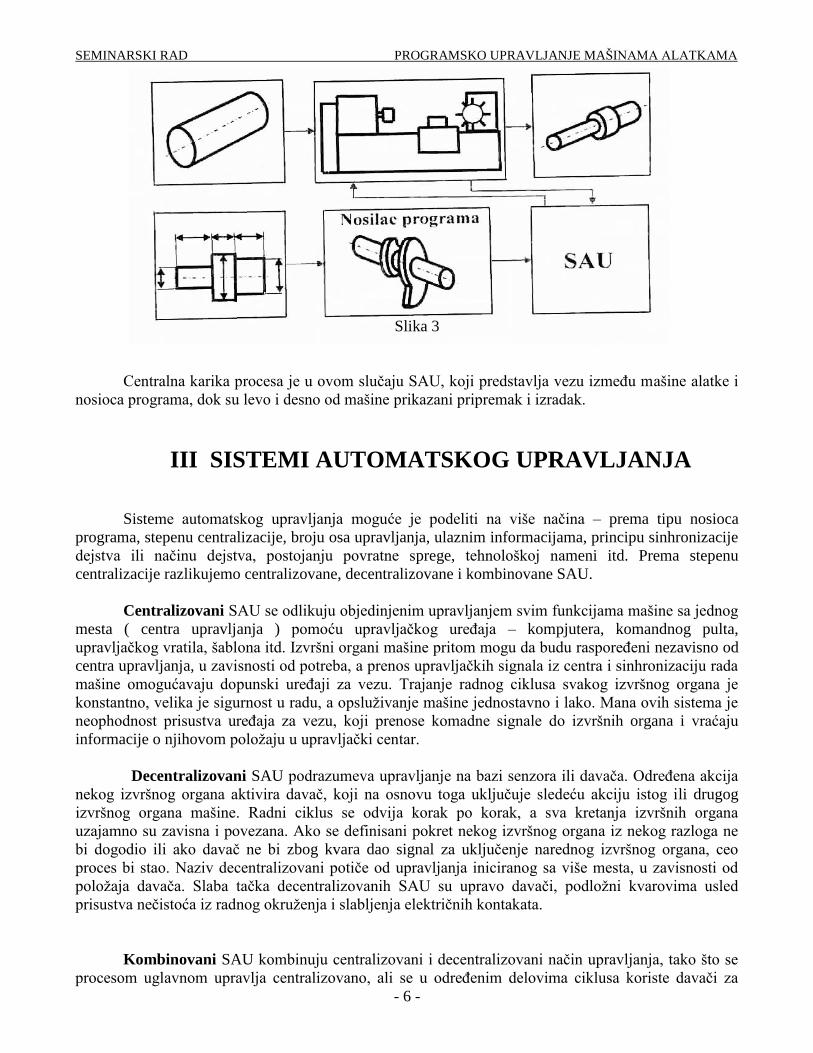
Osnovna šema automatskog upravljanja mašinom alatkom predstavljena je na slici 3.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 6 -
Slika 3
Centralna karika procesa je u ovom slučaju SAU, koji predstavlja vezu izmeĎu mašine alatke i
nosioca programa, dok su levo i desno od mašine prikazani pripremak i izradak.
III SISTEMI AUTOMATSKOG UPRAVLJANJA
Sisteme automatskog upravljanja moguće je podeliti na više načina – prema tipu nosioca
programa, stepenu centralizacije, broju osa upravljanja, ulaznim informacijama, principu sinhronizacije
dejstva ili načinu dejstva, postojanju povratne sprege, tehnološkoj nameni itd. Prema stepenu
centralizacije razlikujemo centralizovane, decentralizovane i kombinovane SAU.
Centralizovani SAU se odlikuju objedinjenim upravljanjem svim funkcijama mašine sa jednog
mesta ( centra upravljanja ) pomoću upravljačkog ureĎaja – kompjutera, komandnog pulta,
upravljačkog vratila, šablona itd. Izvršni organi mašine pritom mogu da budu rasporeĎeni nezavisno od
centra upravljanja, u zavisnosti od potreba, a prenos upravljačkih signala iz centra i sinhronizaciju rada
mašine omogućavaju dopunski ureĎaji za vezu. Trajanje radnog ciklusa svakog izvršnog organa je
konstantno, velika je sigurnost u radu, a opsluţivanje mašine jednostavno i lako. Mana ovih sistema je
neophodnost prisustva ureĎaja za vezu, koji prenose komadne signale do izvršnih organa i vraćaju
informacije o njihovom poloţaju u upravljački centar.
Decentralizovani SAU podrazumeva upravljanje na bazi senzora ili davača. OdreĎena akcija
nekog izvršnog organa aktivira davač, koji na osnovu toga uključuje sledeću akciju istog ili drugog
izvršnog organa mašine. Radni ciklus se odvija korak po korak, a sva kretanja izvršnih organa
uzajamno su zavisna i povezana. Ako se definisani pokret nekog izvršnog organa iz nekog razloga ne
bi dogodio ili ako davač ne bi zbog kvara dao signal za uključenje narednog izvršnog organa, ceo
proces bi stao. Naziv decentralizovani potiče od upravljanja iniciranog sa više mesta, u zavisnosti od
poloţaja davača. Slaba tačka decentralizovanih SAU su upravo davači, podloţni kvarovima usled
prisustva nečistoća iz radnog okruţenja i slabljenja električnih kontakata.
Kombinovani SAU kombinuju centralizovani i decentralizovani način upravljanja, tako što se
procesom uglavnom upravlja centralizovano, ali se u odreĎenim delovima ciklusa koriste davači za
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 7 -
pokretanje neke radnje, tj. decentralizovani način upravljanja. Primera radi, ako se na proces bušenja na
vertikalnoj bušilici primeni kombinovani SAU, radom motora bušilice i kretanjem alata ili radnog stola
u horizontalnoj ravni moţe da se upravlja glavnim kompjuterom, dok kretanje u pravcu ose alata mogu
da iniciraju davači – detektor poloţaja obradka za početak bušenja i davač koji pri odreĎenoj dubini
bušenja uključuje povratni hod alata, za kraj bušenja.
Veoma bitan deo upravljanja primenom SAU jeste samo zadavanje programa – projektovanje
odgovarajućeg nosača programa i prenos programa sa nosača na mašinu radi realizacije. Kvalitet
nosioca programa se procenjuje na osnovu raznih kriterijuma, npr. način drţanja programa, postojanost
i količina zapisanih informacija, brzina očitavanja programa sa nosioca, nominalni radni vek i lakoća
zamene nosioca u slučaju potrebe.
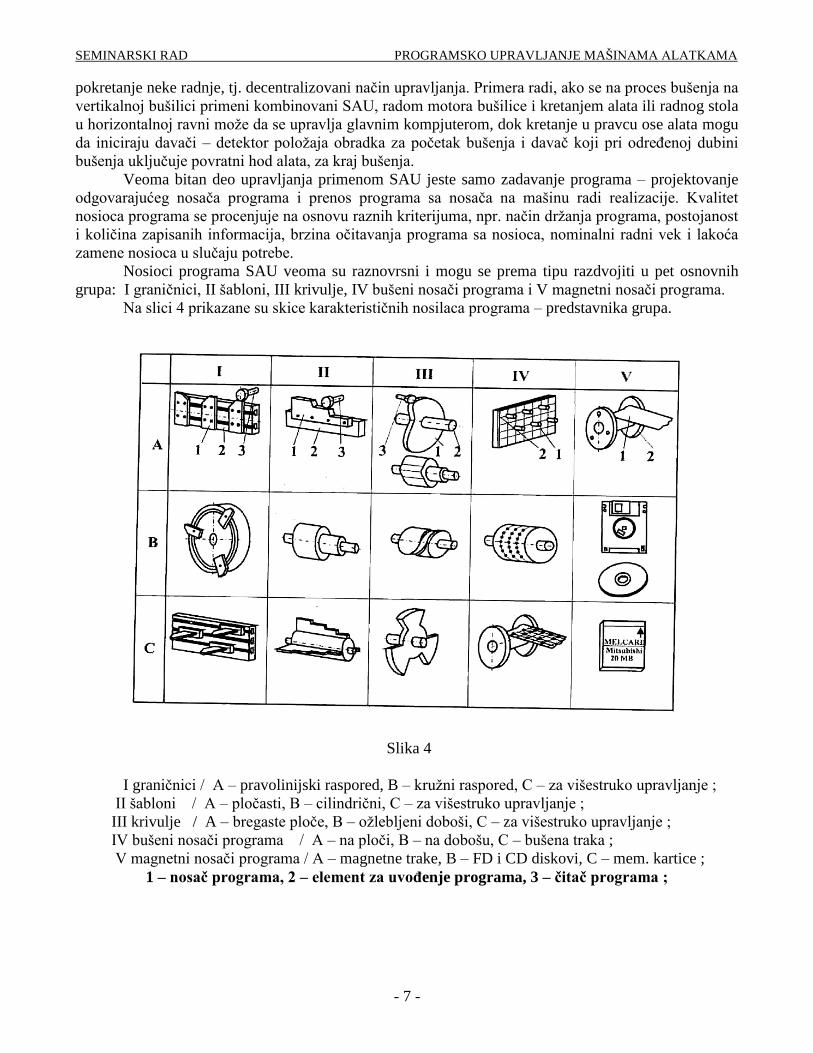
Nosioci programa SAU veoma su raznovrsni i mogu se prema tipu razdvojiti u pet osnovnih
grupa: I graničnici, II šabloni, III krivulje, IV bušeni nosači programa i V magnetni nosači programa.
Na slici 4 prikazane su skice karakterističnih nosilaca programa – predstavnika grupa.
Slika 4
I graničnici / A – pravolinijski raspored, B – kruţni raspored, C – za višestruko upravljanje ;
II šabloni / A – pločasti, B – cilindrični, C – za višestruko upravljanje ;
III krivulje / A – bregaste ploče, B – oţlebljeni doboši, C – za višestruko upravljanje ;
IV bušeni nosači programa / A – na ploči, B – na dobošu, C – bušena traka ;
V magnetni nosači programa / A – magnetne trake, B – FD i CD diskovi, C – mem. kartice ;
1 – nosaĉ programa, 2 – element za uvoĊenje programa, 3 – ĉitaĉ programa ;
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 8 -
U zavisnosti od tipa nosioca programa koji se koristi, sisteme automatskog upravljanja moţemo
podeliti na SAU sa graničnicima, SAU sa šablonima, SAU sa krivuljama, SAU sa perforiranim
nosačima i SAU sa magnetnim nosačima.
SAU sa graničnicima se odlikuju lakim zadavanjem i pouzdanim očitavanjem programa, ali
nisu pogodni za procese u kojima se sinhronizuje rad više izvršnih organa, jer je kod ovih SAU
praćenje poloţaja izvršnih organa oteţano.
SAU sa šablonima mogu da upravljaju izradom vrlo sloţenih i raznovrsnih površina, jer se
šabloni jednostavno smenjuju i sadrţe dosta detalja. Sloţena i spora izrada kvalitetnih šablona
predstavlja glavni nedostatak ovih sistema.
SAU sa krivuljama su veoma pogodni za procese koji zahtevaju preciznu sinhronizaciju više
izvršnih organa. Koriste se za centralizovano upravljanje, a mana im je kompleksnost izrade krivulja.
SAU sa perforiranim nosačima programa se izraĎuju u varijanti bušenih kartica pričvršćenih na
ploču ili doboš i varijanti bušene trake. Kod varijanti sa bušenim karticama, program se nanosi na
karticu postavljanjem čepova u otvore ( perforaciju ) u skladu sa ţeljenim tehnološkim procesom
obrade. Varijante sa bušenom trakom koriste rolnu sa trakom koja je izbušena prema šemi za
odgovarajući proces i očitava se posebnim čitačem. Veliki broj otvora omogućava definisanje velikog
broja programskih funkcija i različite kombinacije operativnih zahvata. Bušeni nosači su relativno
jeftin i efikasan medijum za prenos informacija, kod kojih su čitači najsloţeniji deo.
SAU sa magnetnim nosačima programa mogu da prenesu najveću količinu informacija u
upravljačkom programu. Tipični magnetni nosači su flopi i kompakt diskovi ( FD i CD ), kao i razne
memorijske kartice. Očitavanje programa sa nosača se vrši magnetnim ili laserskim čitačima. Sami
nosači su osetljivi na elektromagnetne uticaje iz okoline i mikrooštećenja radne površine nosača, pa to
treba imati u vidu pri instaliranju sistema.
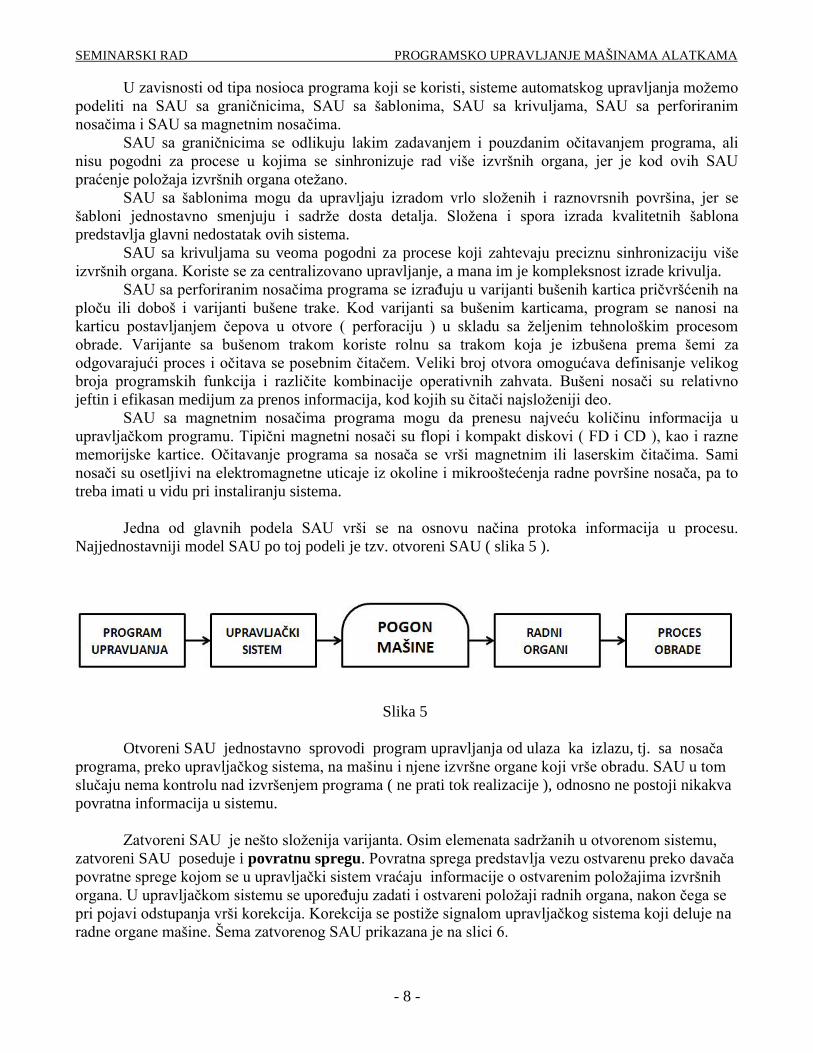
Jedna od glavnih podela SAU vrši se na osnovu načina protoka informacija u procesu.
Najjednostavniji model SAU po toj podeli je tzv. otvoreni SAU ( slika 5 ).
Slika 5
Otvoreni SAU jednostavno sprovodi program upravljanja od ulaza ka izlazu, tj. sa nosača
programa, preko upravljačkog sistema, na mašinu i njene izvršne organe koji vrše obradu. SAU u tom
slučaju nema kontrolu nad izvršenjem programa ( ne prati tok realizacije ), odnosno ne postoji nikakva
povratna informacija u sistemu.
Zatvoreni SAU je nešto sloţenija varijanta. Osim elemenata sadrţanih u otvorenom sistemu,
zatvoreni SAU poseduje i povratnu spregu. Povratna sprega predstavlja vezu ostvarenu preko davača
povratne sprege kojom se u upravljački sistem vraćaju informacije o ostvarenim poloţajima izvršnih
organa. U upravljačkom sistemu se uporeĎuju zadati i ostvareni poloţaji radnih organa, nakon čega se
pri pojavi odstupanja vrši korekcija. Korekcija se postiţe signalom upravljačkog sistema koji deluje na
radne organe mašine. Šema zatvorenog SAU prikazana je na slici 6.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 9 -
Slika 6
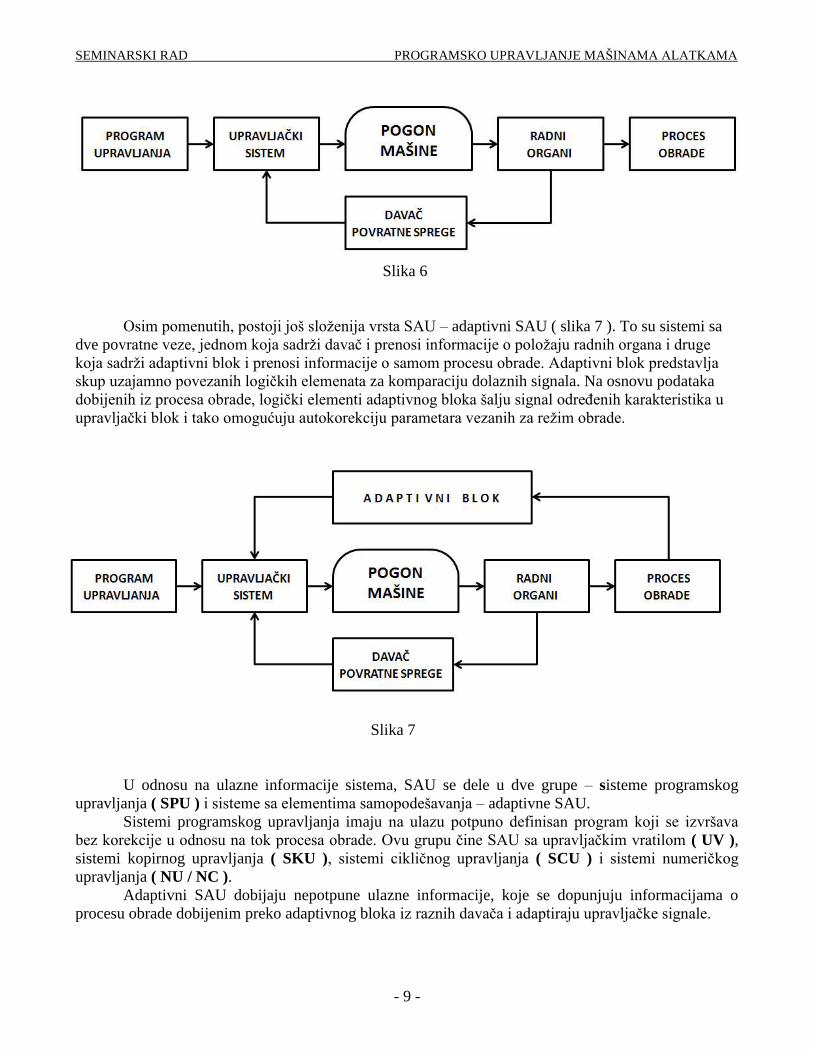
Osim pomenutih, postoji još sloţenija vrsta SAU – adaptivni SAU ( slika 7 ). To su sistemi sa
dve povratne veze, jednom koja sadrţi davač i prenosi informacije o poloţaju radnih organa i druge
koja sadrţi adaptivni blok i prenosi informacije o samom procesu obrade. Adaptivni blok predstavlja
skup uzajamno povezanih logičkih elemenata za komparaciju dolaznih signala. Na osnovu podataka
dobijenih iz procesa obrade, logički elementi adaptivnog bloka šalju signal odreĎenih karakteristika u
upravljački blok i tako omogućuju autokorekciju parametara vezanih za reţim obrade.
Slika 7
U odnosu na ulazne informacije sistema, SAU se dele u dve grupe – sisteme programskog
upravljanja ( SPU ) i sisteme sa elementima samopodešavanja – adaptivne SAU.
Sistemi programskog upravljanja imaju na ulazu potpuno definisan program koji se izvršava
bez korekcije u odnosu na tok procesa obrade. Ovu grupu čine SAU sa upravljačkim vratilom ( UV ),
sistemi kopirnog upravljanja ( SKU ), sistemi cikličnog upravljanja ( SCU ) i sistemi numeričkog
upravljanja ( NU / NC ).
Adaptivni SAU dobijaju nepotpune ulazne informacije, koje se dopunjuju informacijama o
procesu obrade dobijenim preko adaptivnog bloka iz raznih davača i adaptiraju upravljačke signale.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 10 -
IV SISTEMI PROGRAMSKOG UPRAVLJANJA
4.1 MEHANIĈKI SISTEMI SA UPRAVLJAĈKIM VRATILOM ( UV )
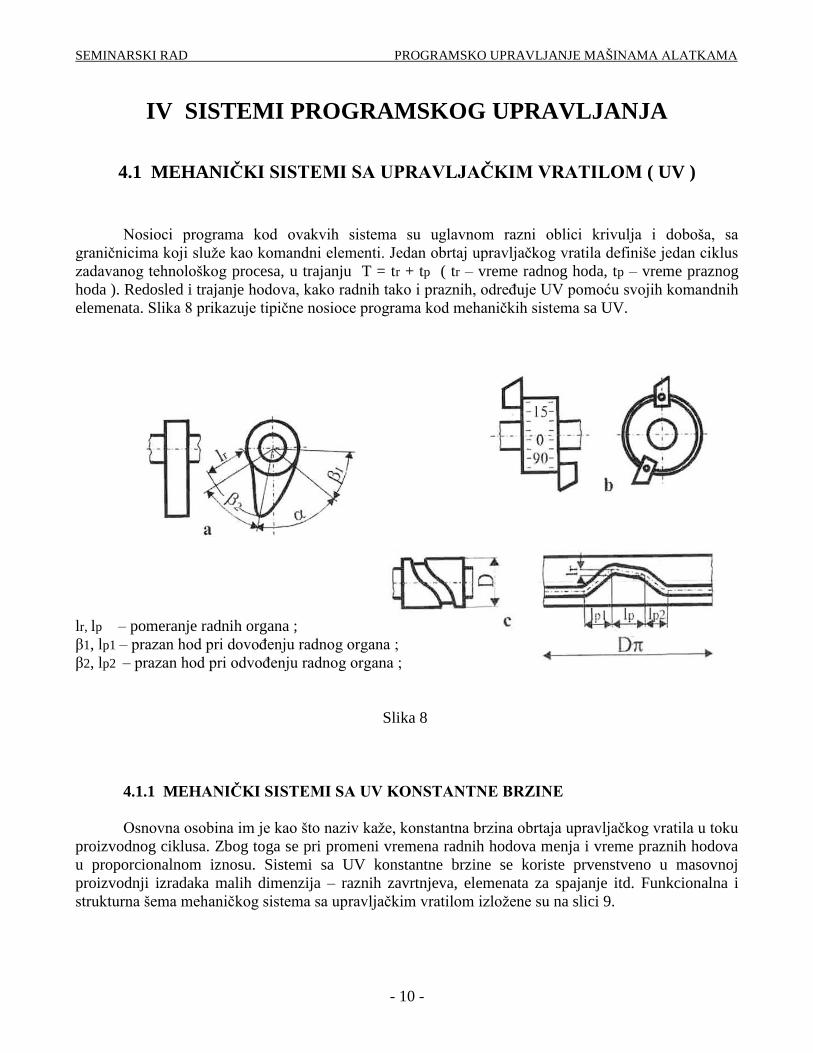
Nosioci programa kod ovakvih sistema su uglavnom razni oblici krivulja i doboša, sa
graničnicima koji sluţe kao komandni elementi. Jedan obrtaj upravljačkog vratila definiše jedan ciklus
zadavanog tehnološkog procesa, u trajanju T = tr + tp ( tr – vreme radnog hoda, tp – vreme praznog
hoda ). Redosled i trajanje hodova, kako radnih tako i praznih, odreĎuje UV pomoću svojih komandnih
elemenata. Slika 8 prikazuje tipične nosioce programa kod mehaničkih sistema sa UV.
lr, lp – pomeranje radnih organa ;
β1, lp1 – prazan hod pri dovoĎenju radnog organa ;
β2, lp2 – prazan hod pri odvoĎenju radnog organa ;
Slika 8
4.1.1 MEHANIĈKI SISTEMI SA UV KONSTANTNE BRZINE
Osnovna osobina im je kao što naziv kaţe, konstantna brzina obrtaja upravljačkog vratila u toku
proizvodnog ciklusa. Zbog toga se pri promeni vremena radnih hodova menja i vreme praznih hodova
u proporcionalnom iznosu. Sistemi sa UV konstantne brzine se koriste prvenstveno u masovnoj
proizvodnji izradaka malih dimenzija – raznih zavrtnjeva, elemenata za spajanje itd. Funkcionalna i
strukturna šema mehaničkog sistema sa upravljačkim vratilom izloţene su na slici 9.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 11 -
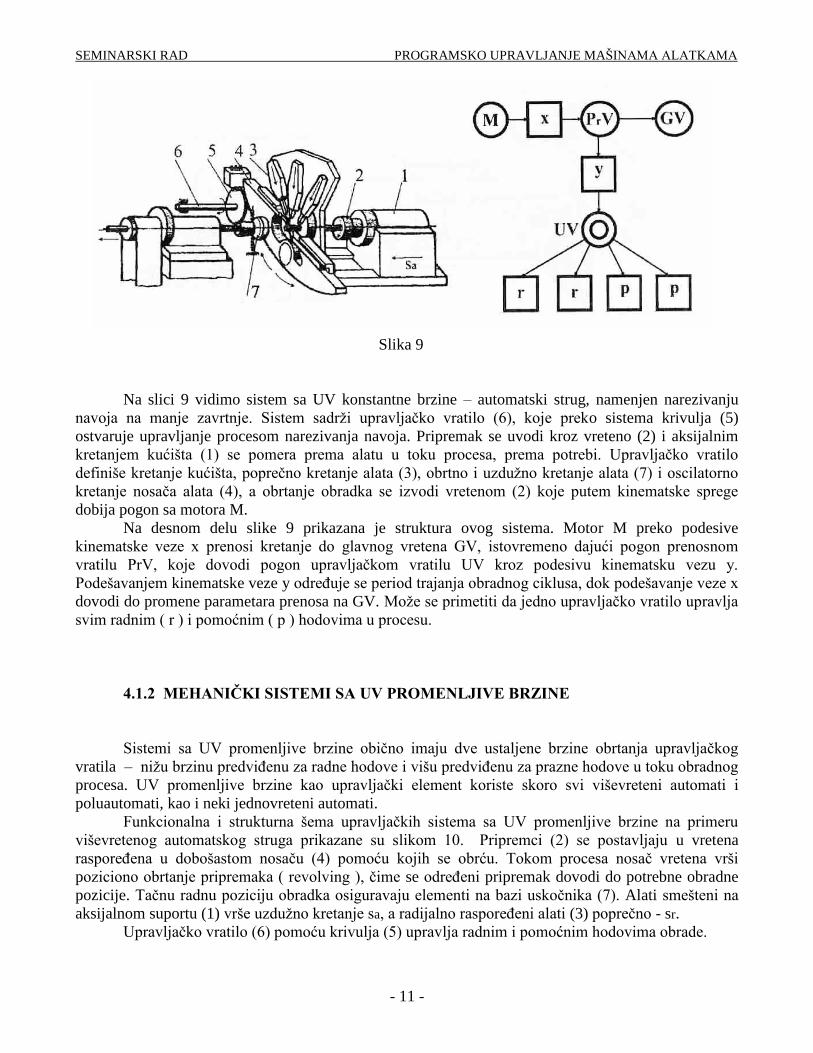
Slika 9
Na slici 9 vidimo sistem sa UV konstantne brzine – automatski strug, namenjen narezivanju
navoja na manje zavrtnje. Sistem sadrţi upravljačko vratilo (6), koje preko sistema krivulja (5)
ostvaruje upravljanje procesom narezivanja navoja. Pripremak se uvodi kroz vreteno (2) i aksijalnim
kretanjem kućišta (1) se pomera prema alatu u toku procesa, prema potrebi. Upravljačko vratilo
definiše kretanje kućišta, poprečno kretanje alata (3), obrtno i uzduţno kretanje alata (7) i oscilatorno
kretanje nosača alata (4), a obrtanje obradka se izvodi vretenom (2) koje putem kinematske sprege
dobija pogon sa motora M.
Na desnom delu slike 9 prikazana je struktura ovog sistema. Motor M preko podesive
kinematske veze x prenosi kretanje do glavnog vretena GV, istovremeno dajući pogon prenosnom
vratilu PrV, koje dovodi pogon upravljačkom vratilu UV kroz podesivu kinematsku vezu y.
Podešavanjem kinematske veze y odreĎuje se period trajanja obradnog ciklusa, dok podešavanje veze x
dovodi do promene parametara prenosa na GV. Moţe se primetiti da jedno upravljačko vratilo upravlja
svim radnim ( r ) i pomoćnim ( p ) hodovima u procesu.
4.1.2 MEHANIĈKI SISTEMI SA UV PROMENLJIVE BRZINE
Sistemi sa UV promenljive brzine obično imaju dve ustaljene brzine obrtanja upravljačkog
vratila – niţu brzinu predviĎenu za radne hodove i višu predviĎenu za prazne hodove u toku obradnog
procesa. UV promenljive brzine kao upravljački element koriste skoro svi viševreteni automati i
poluautomati, kao i neki jednovreteni automati.
Funkcionalna i strukturna šema upravljačkih sistema sa UV promenljive brzine na primeru
viševretenog automatskog struga prikazane su slikom 10. Pripremci (2) se postavljaju u vretena
rasporeĎena u dobošastom nosaču (4) pomoću kojih se obrću. Tokom procesa nosač vretena vrši
poziciono obrtanje pripremaka ( revolving ), čime se odreĎeni pripremak dovodi do potrebne obradne
pozicije. Tačnu radnu poziciju obradka osiguravaju elementi na bazi uskočnika (7). Alati smešteni na
aksijalnom suportu (1) vrše uzduţno kretanje sa, a radijalno rasporeĎeni alati (3) poprečno - sr.
Upravljačko vratilo (6) pomoću krivulja (5) upravlja radnim i pomoćnim hodovima obrade.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 12 -
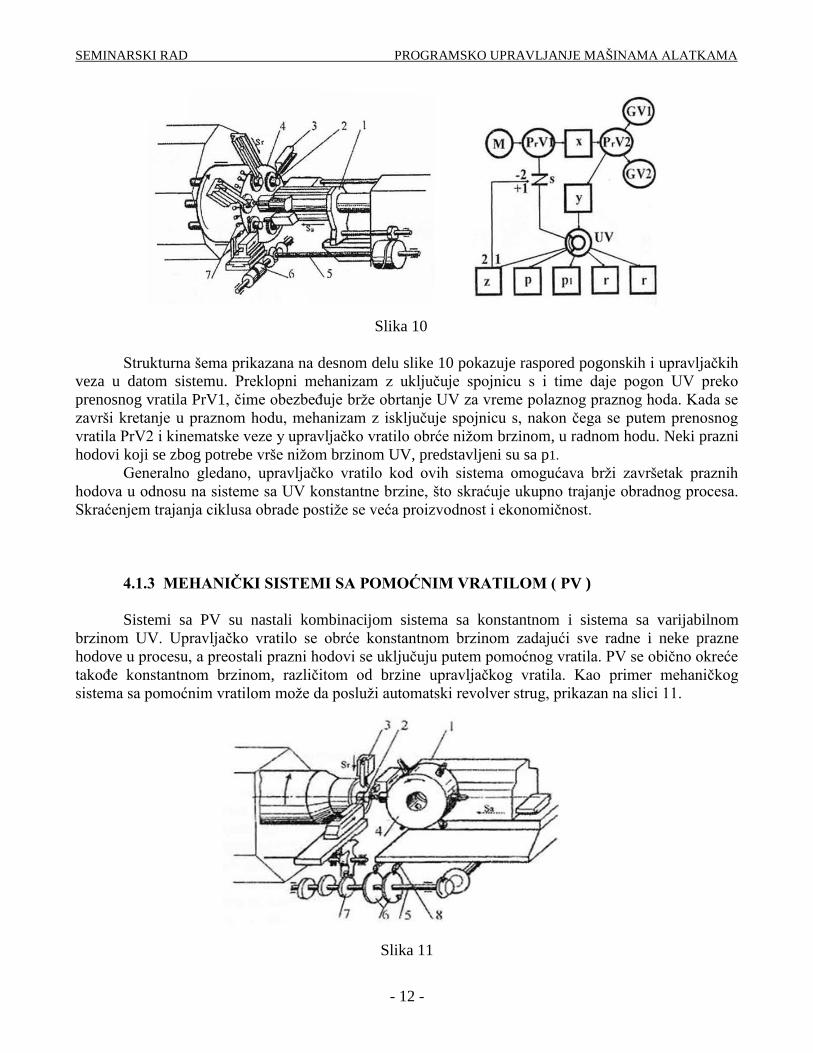
Slika 10
Strukturna šema prikazana na desnom delu slike 10 pokazuje raspored pogonskih i upravljačkih
veza u datom sistemu. Preklopni mehanizam z uključuje spojnicu s i time daje pogon UV preko
prenosnog vratila PrV1, čime obezbeĎuje brţe obrtanje UV za vreme polaznog praznog hoda. Kada se
završi kretanje u praznom hodu, mehanizam z isključuje spojnicu s, nakon čega se putem prenosnog
vratila PrV2 i kinematske veze y upravljačko vratilo obrće niţom brzinom, u radnom hodu. Neki prazni
hodovi koji se zbog potrebe vrše niţom brzinom UV, predstavljeni su sa p1.
Generalno gledano, upravljačko vratilo kod ovih sistema omogućava brţi završetak praznih
hodova u odnosu na sisteme sa UV konstantne brzine, što skraćuje ukupno trajanje obradnog procesa.
Skraćenjem trajanja ciklusa obrade postiţe se veća proizvodnost i ekonomičnost.
4.1.3 MEHANIĈKI SISTEMI SA POMOĆNIM VRATILOM ( PV )
Sistemi sa PV su nastali kombinacijom sistema sa konstantnom i sistema sa varijabilnom
brzinom UV. Upravljačko vratilo se obrće konstantnom brzinom zadajući sve radne i neke prazne
hodove u procesu, a preostali prazni hodovi se uključuju putem pomoćnog vratila. PV se obično okreće
takoĎe konstantnom brzinom, različitom od brzine upravljačkog vratila. Kao primer mehaničkog
sistema sa pomoćnim vratilom moţe da posluţi automatski revolver strug, prikazan na slici 11.
Slika 11
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 13 -
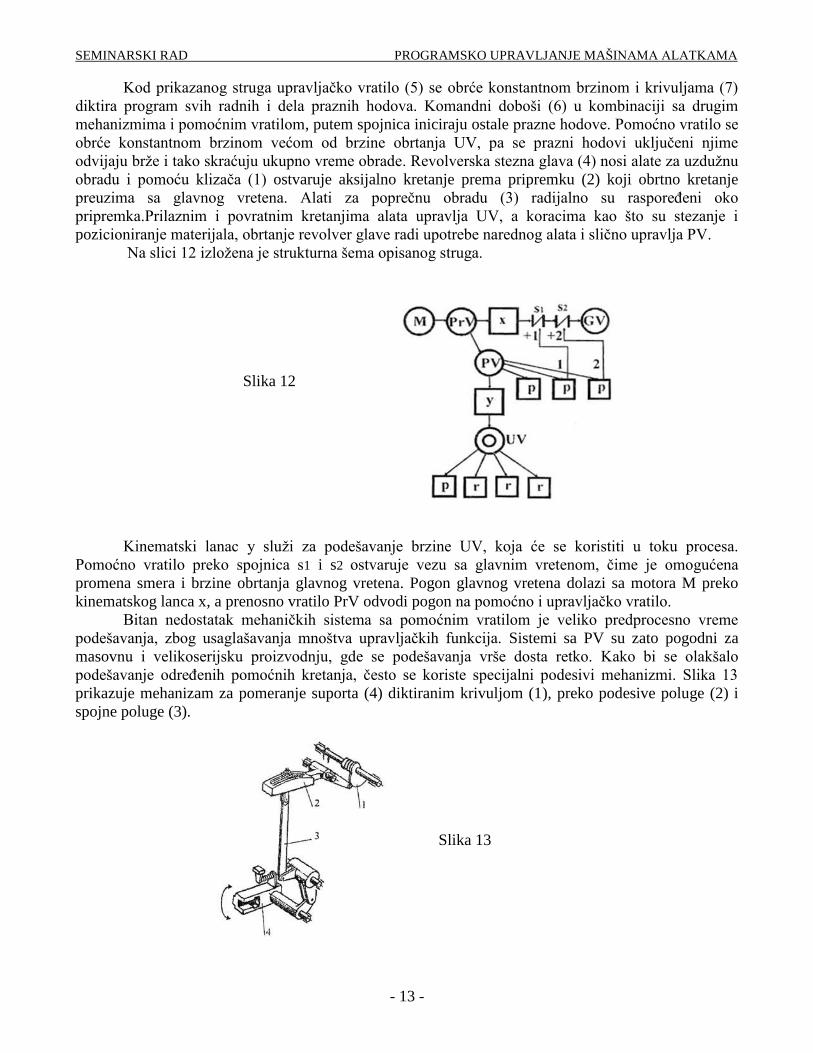
Kod prikazanog struga upravljačko vratilo (5) se obrće konstantnom brzinom i krivuljama (7)
diktira program svih radnih i dela praznih hodova. Komandni doboši (6) u kombinaciji sa drugim
mehanizmima i pomoćnim vratilom, putem spojnica iniciraju ostale prazne hodove. Pomoćno vratilo se
obrće konstantnom brzinom većom od brzine obrtanja UV, pa se prazni hodovi uključeni njime
odvijaju brţe i tako skraćuju ukupno vreme obrade. Revolverska stezna glava (4) nosi alate za uzduţnu
obradu i pomoću klizača (1) ostvaruje aksijalno kretanje prema pripremku (2) koji obrtno kretanje
preuzima sa glavnog vretena. Alati za poprečnu obradu (3) radijalno su rasporeĎeni oko
pripremka.Prilaznim i povratnim kretanjima alata upravlja UV, a koracima kao što su stezanje i
pozicioniranje materijala, obrtanje revolver glave radi upotrebe narednog alata i slično upravlja PV.
Na slici 12 izloţena je strukturna šema opisanog struga.
Slika 12
Kinematski lanac y sluţi za podešavanje brzine UV, koja će se koristiti u toku procesa.
Pomoćno vratilo preko spojnica s1 i s2 ostvaruje vezu sa glavnim vretenom, čime je omogućena
promena smera i brzine obrtanja glavnog vretena. Pogon glavnog vretena dolazi sa motora M preko
kinematskog lanca x, a prenosno vratilo PrV odvodi pogon na pomoćno i upravljačko vratilo.
Bitan nedostatak mehaničkih sistema sa pomoćnim vratilom je veliko predprocesno vreme
podešavanja, zbog usaglašavanja mnoštva upravljačkih funkcija. Sistemi sa PV su zato pogodni za
masovnu i velikoserijsku proizvodnju, gde se podešavanja vrše dosta retko. Kako bi se olakšalo
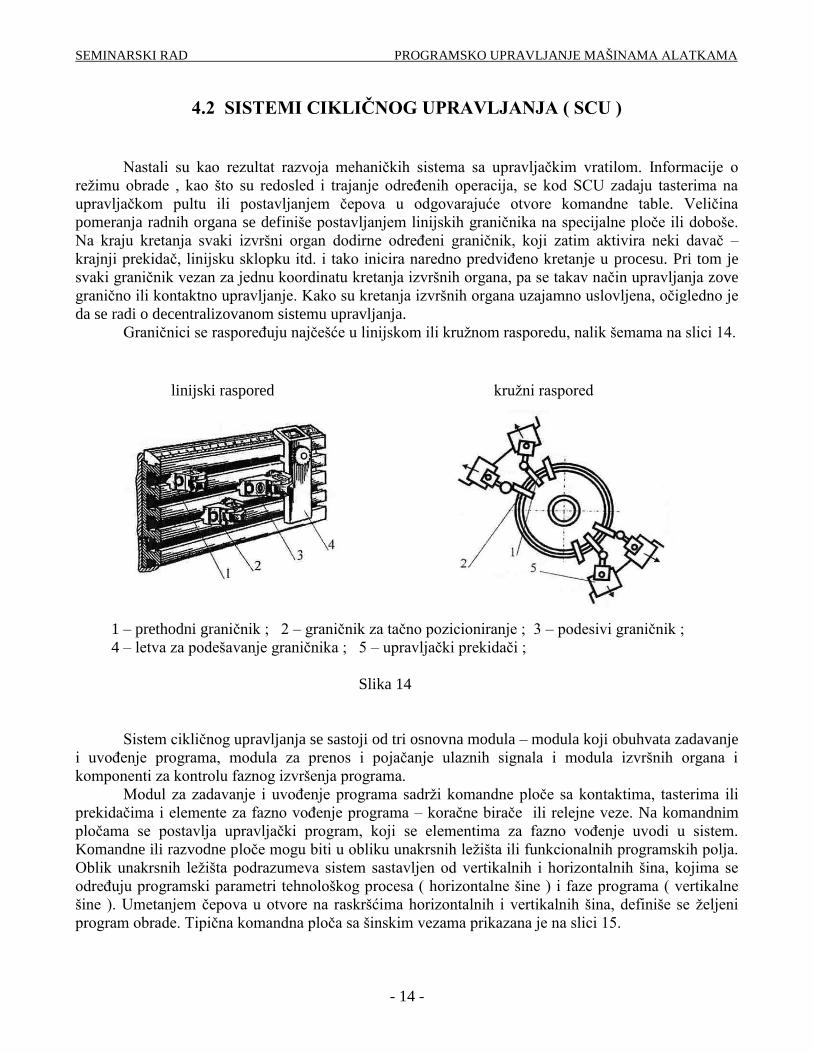
podešavanje odreĎenih pomoćnih kretanja, često se koriste specijalni podesivi mehanizmi. Slika 13
prikazuje mehanizam za pomeranje suporta (4) diktiranim krivuljom (1), preko podesive poluge (2) i
spojne poluge (3).
Slika 13
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 14 -
4.2 SISTEMI CIKLIĈNOG UPRAVLJANJA ( SCU )
Nastali su kao rezultat razvoja mehaničkih sistema sa upravljačkim vratilom. Informacije o
reţimu obrade , kao što su redosled i trajanje odreĎenih operacija, se kod SCU zadaju tasterima na
upravljačkom pultu ili postavljanjem čepova u odgovarajuće otvore komandne table. Veličina
pomeranja radnih organa se definiše postavljanjem linijskih graničnika na specijalne ploče ili doboše.
Na kraju kretanja svaki izvršni organ dodirne odreĎeni graničnik, koji zatim aktivira neki davač –
krajnji prekidač, linijsku sklopku itd. i tako inicira naredno predviĎeno kretanje u procesu. Pri tom je
svaki graničnik vezan za jednu koordinatu kretanja izvršnih organa, pa se takav način upravljanja zove
granično ili kontaktno upravljanje. Kako su kretanja izvršnih organa uzajamno uslovljena, očigledno je
da se radi o decentralizovanom sistemu upravljanja.
Graničnici se rasporeĎuju najčešće u linijskom ili kruţnom rasporedu, nalik šemama na slici 14.
linijski raspored kruţni raspored
1 – prethodni graničnik ; 2 – graničnik za tačno pozicioniranje ; 3 – podesivi graničnik ;
4 – letva za podešavanje graničnika ; 5 – upravljački prekidači ;
Slika 14
Sistem cikličnog upravljanja se sastoji od tri osnovna modula – modula koji obuhvata zadavanje
i uvoĎenje programa, modula za prenos i pojačanje ulaznih signala i modula izvršnih organa i
komponenti za kontrolu faznog izvršenja programa.
Modul za zadavanje i uvoĎenje programa sadrţi komandne ploče sa kontaktima, tasterima ili
prekidačima i elemente za fazno voĎenje programa – koračne birače ili relejne veze. Na komandnim
pločama se postavlja upravljački program, koji se elementima za fazno voĎenje uvodi u sistem.
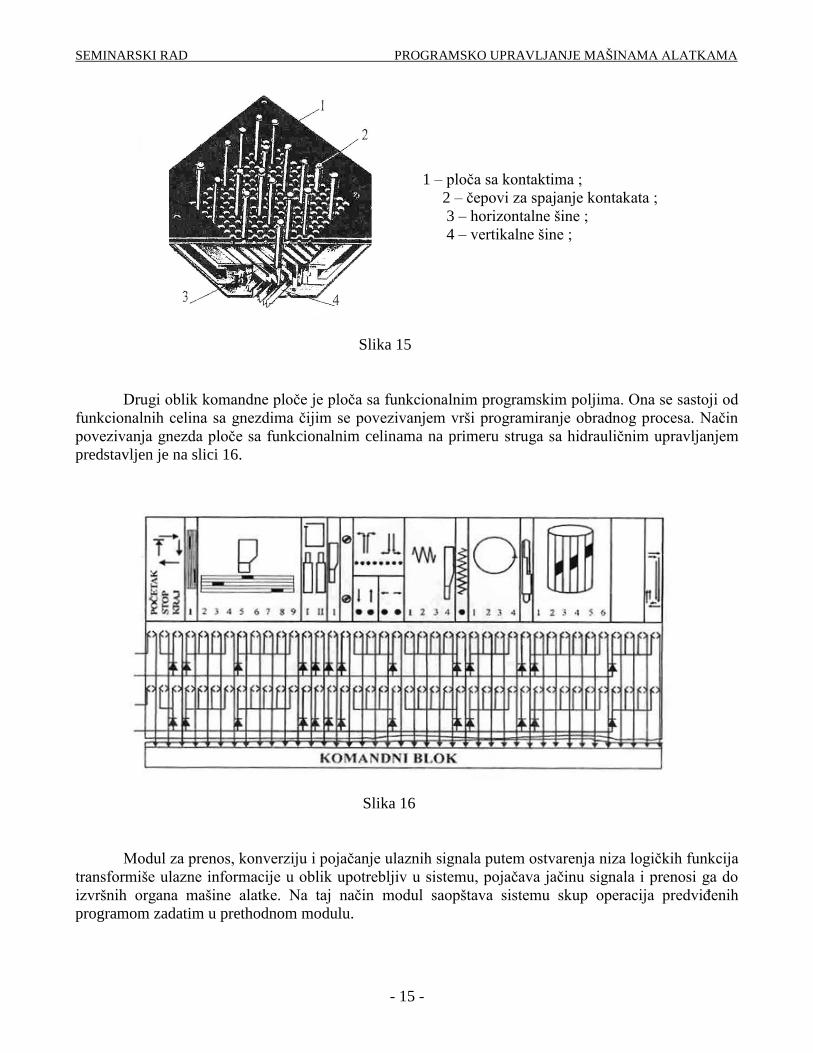
Komandne ili razvodne ploče mogu biti u obliku unakrsnih leţišta ili funkcionalnih programskih polja.
Oblik unakrsnih leţišta podrazumeva sistem sastavljen od vertikalnih i horizontalnih šina, kojima se
odreĎuju programski parametri tehnološkog procesa ( horizontalne šine ) i faze programa ( vertikalne
šine ). Umetanjem čepova u otvore na raskršćima horizontalnih i vertikalnih šina, definiše se ţeljeni
program obrade. Tipična komandna ploča sa šinskim vezama prikazana je na slici 15.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 15 -
1 – ploča sa kontaktima ;
2 – čepovi za spajanje kontakata ;
3 – horizontalne šine ;
4 – vertikalne šine ;
Slika 15
Drugi oblik komandne ploče je ploča sa funkcionalnim programskim poljima. Ona se sastoji od
funkcionalnih celina sa gnezdima čijim se povezivanjem vrši programiranje obradnog procesa. Način
povezivanja gnezda ploče sa funkcionalnim celinama na primeru struga sa hidrauličnim upravljanjem
predstavljen je na slici 16.
Slika 16
Modul za prenos, konverziju i pojačanje ulaznih signala putem ostvarenja niza logičkih funkcija
transformiše ulazne informacije u oblik upotrebljiv u sistemu, pojačava jačinu signala i prenosi ga do
izvršnih organa mašine alatke. Na taj način modul saopštava sistemu skup operacija predviĎenih
programom zadatim u prethodnom modulu.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 16 -
Modul izvršnih organa i komponenti za kontrolu faznog izvršenja programa direktno realizuje
komande dobijene iz modula za prenos. Sastoji se od izvršnih organa mašine i raznih izvršnih
elemenata – spojnica, razvodnika itd. koji omogućavaju aktivaciju izvršnih organa mašine po
programiranom redosledu. Kao komponente za kontrolu faznog izvršenja programa najčešće se koriste
linijski prekidači i razni releji ( vremenski, strujni, pritisni itd. ). Za kontrolu kretanja izvršnih organa se
uglavnom koriste linijski prekidači, a ne retko i pritisni releji.
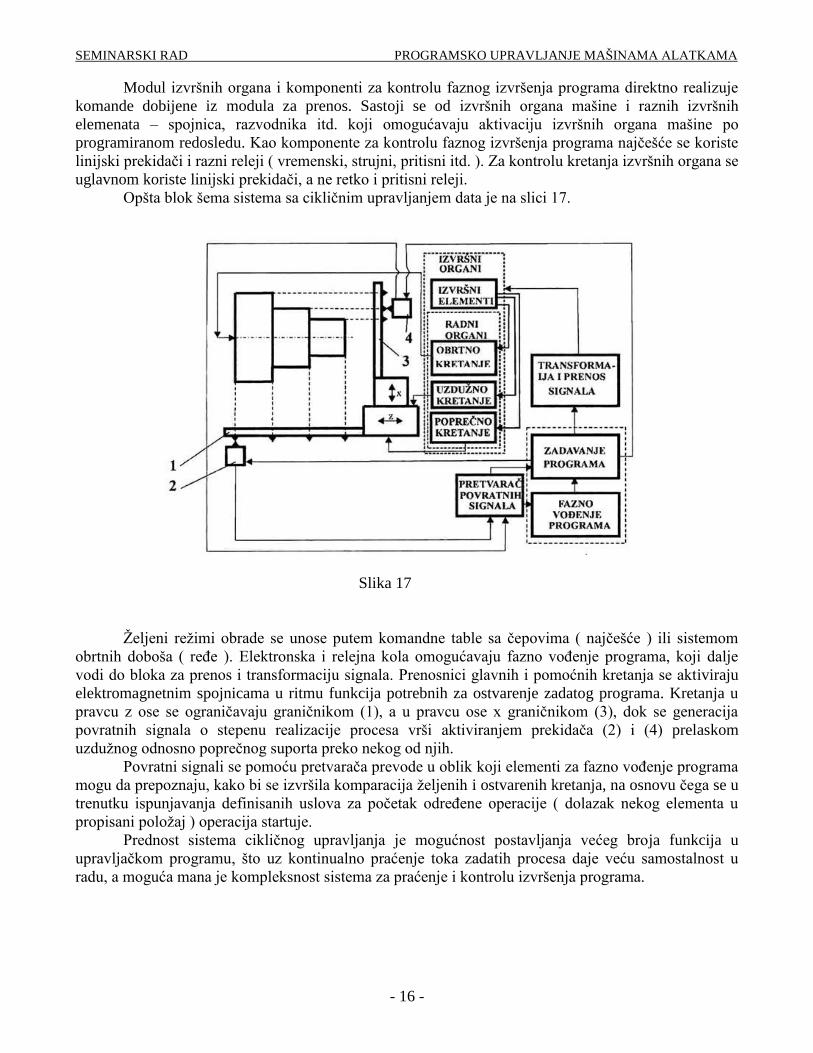
Opšta blok šema sistema sa cikličnim upravljanjem data je na slici 17.
Slika 17
Ţeljeni reţimi obrade se unose putem komandne table sa čepovima ( najčešće ) ili sistemom
obrtnih doboša ( reĎe ). Elektronska i relejna kola omogućavaju fazno voĎenje programa, koji dalje
vodi do bloka za prenos i transformaciju signala. Prenosnici glavnih i pomoćnih kretanja se aktiviraju
elektromagnetnim spojnicama u ritmu funkcija potrebnih za ostvarenje zadatog programa. Kretanja u
pravcu z ose se ograničavaju graničnikom (1), a u pravcu ose x graničnikom (3), dok se generacija
povratnih signala o stepenu realizacije procesa vrši aktiviranjem prekidača (2) i (4) prelaskom
uzduţnog odnosno poprečnog suporta preko nekog od njih.
Povratni signali se pomoću pretvarača prevode u oblik koji elementi za fazno voĎenje programa
mogu da prepoznaju, kako bi se izvršila komparacija ţeljenih i ostvarenih kretanja, na osnovu čega se u
trenutku ispunjavanja definisanih uslova za početak odreĎene operacije ( dolazak nekog elementa u
propisani poloţaj ) operacija startuje.
Prednost sistema cikličnog upravljanja je mogućnost postavljanja većeg broja funkcija u
upravljačkom programu, što uz kontinualno praćenje toka zadatih procesa daje veću samostalnost u
radu, a moguća mana je kompleksnost sistema za praćenje i kontrolu izvršenja programa.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 17 -
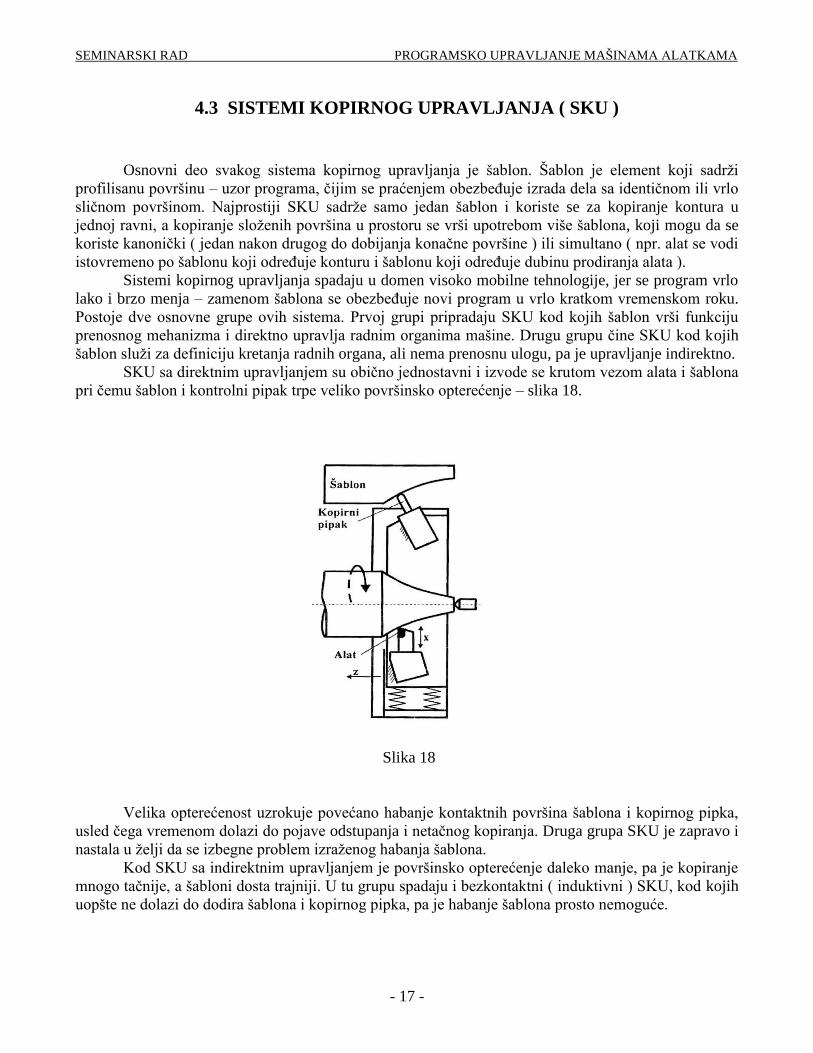
4.3 SISTEMI KOPIRNOG UPRAVLJANJA ( SKU )
Osnovni deo svakog sistema kopirnog upravljanja je šablon. Šablon je element koji sadrţi
profilisanu površinu – uzor programa, čijim se praćenjem obezbeĎuje izrada dela sa identičnom ili vrlo
sličnom površinom. Najprostiji SKU sadrţe samo jedan šablon i koriste se za kopiranje kontura u
jednoj ravni, a kopiranje sloţenih površina u prostoru se vrši upotrebom više šablona, koji mogu da se
koriste kanonički ( jedan nakon drugog do dobijanja konačne površine ) ili simultano ( npr. alat se vodi
istovremeno po šablonu koji odreĎuje konturu i šablonu koji odreĎuje dubinu prodiranja alata ).
Sistemi kopirnog upravljanja spadaju u domen visoko mobilne tehnologije, jer se program vrlo
lako i brzo menja – zamenom šablona se obezbeĎuje novi program u vrlo kratkom vremenskom roku.
Postoje dve osnovne grupe ovih sistema. Prvoj grupi pripradaju SKU kod kojih šablon vrši funkciju
prenosnog mehanizma i direktno upravlja radnim organima mašine. Drugu grupu čine SKU kod kojih
šablon sluţi za definiciju kretanja radnih organa, ali nema prenosnu ulogu, pa je upravljanje indirektno.
SKU sa direktnim upravljanjem su obično jednostavni i izvode se krutom vezom alata i šablona
pri čemu šablon i kontrolni pipak trpe veliko površinsko opterećenje – slika 18.
Slika 18
Velika opterećenost uzrokuje povećano habanje kontaktnih površina šablona i kopirnog pipka,
usled čega vremenom dolazi do pojave odstupanja i netačnog kopiranja. Druga grupa SKU je zapravo i
nastala u ţelji da se izbegne problem izraţenog habanja šablona.
Kod SKU sa indirektnim upravljanjem je površinsko opterećenje daleko manje, pa je kopiranje
mnogo tačnije, a šabloni dosta trajniji. U tu grupu spadaju i bezkontaktni ( induktivni ) SKU, kod kojih
uopšte ne dolazi do dodira šablona i kopirnog pipka, pa je habanje šablona prosto nemoguće.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 18 -
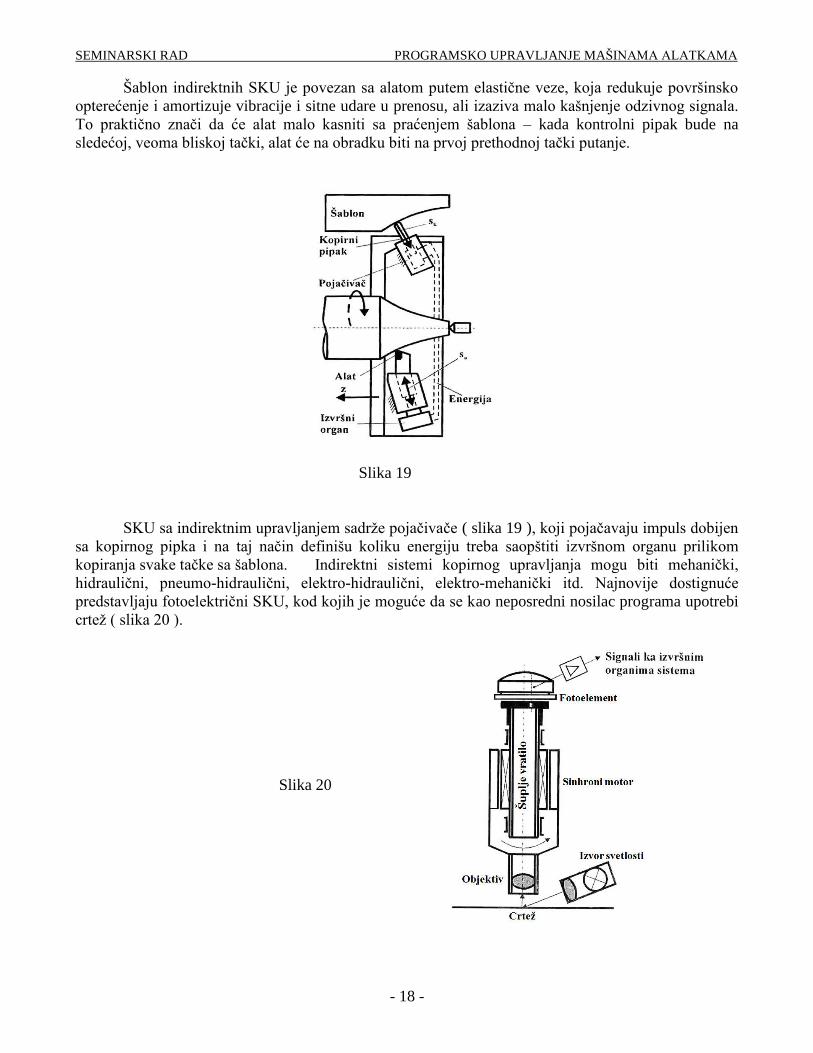
Šablon indirektnih SKU je povezan sa alatom putem elastične veze, koja redukuje površinsko
opterećenje i amortizuje vibracije i sitne udare u prenosu, ali izaziva malo kašnjenje odzivnog signala.
To praktično znači da će alat malo kasniti sa praćenjem šablona – kada kontrolni pipak bude na
sledećoj, veoma bliskoj tački, alat će na obradku biti na prvoj prethodnoj tački putanje.
Slika 19
SKU sa indirektnim upravljanjem sadrţe pojačivače ( slika 19 ), koji pojačavaju impuls dobijen
sa kopirnog pipka i na taj način definišu koliku energiju treba saopštiti izvršnom organu prilikom
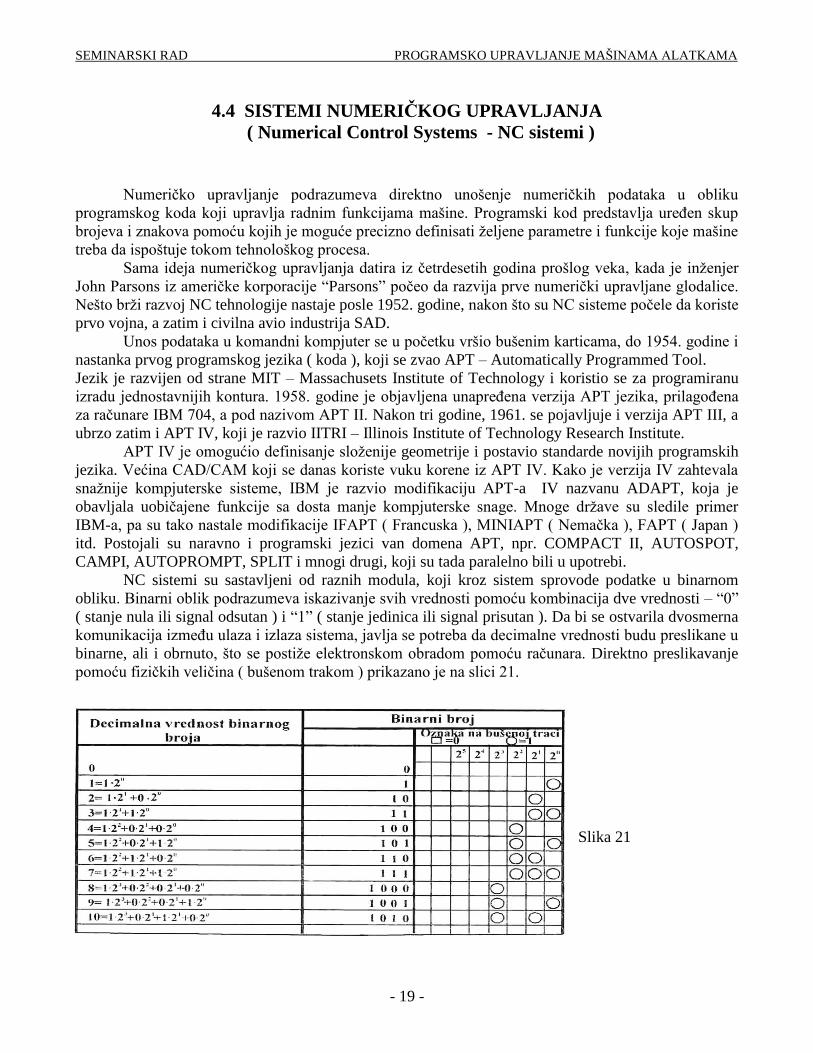
kopiranja svake tačke sa šablona. Indirektni sistemi kopirnog upravljanja mogu biti mehanički,
hidraulični, pneumo-hidraulični, elektro-hidraulični, elektro-mehanički itd. Najnovije dostignuće
predstavljaju fotoelektrični SKU, kod kojih je moguće da se kao neposredni nosilac programa upotrebi
crteţ ( slika 20 ).
Slika 20
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 19 -
4.4 SISTEMI NUMERIĈKOG UPRAVLJANJA
( Numerical Control Systems - NC sistemi )
Numeričko upravljanje podrazumeva direktno unošenje numeričkih podataka u obliku
programskog koda koji upravlja radnim funkcijama mašine. Programski kod predstavlja ureĎen skup
brojeva i znakova pomoću kojih je moguće precizno definisati ţeljene parametre i funkcije koje mašine
treba da ispoštuje tokom tehnološkog procesa.
Sama ideja numeričkog upravljanja datira iz četrdesetih godina prošlog veka, kada je inţenjer
John Parsons iz američke korporacije “Parsons” počeo da razvija prve numerički upravljane glodalice.
Nešto brţi razvoj NC tehnologije nastaje posle 1952. godine, nakon što su NC sisteme počele da koriste
prvo vojna, a zatim i civilna avio industrija SAD.
Unos podataka u komandni kompjuter se u početku vršio bušenim karticama, do 1954. godine i
nastanka prvog programskog jezika ( koda ), koji se zvao APT – Automatically Programmed Tool.
Jezik je razvijen od strane MIT – Massachusets Institute of Technology i koristio se za programiranu
izradu jednostavnijih kontura. 1958. godine je objavljena unapreĎena verzija APT jezika, prilagoĎena
za računare IBM 704, a pod nazivom APT II. Nakon tri godine, 1961. se pojavljuje i verzija APT III, a
ubrzo zatim i APT IV, koji je razvio IITRI – Illinois Institute of Technology Research Institute.
APT IV je omogućio definisanje sloţenije geometrije i postavio standarde novijih programskih
jezika. Većina CAD/CAM koji se danas koriste vuku korene iz APT IV. Kako je verzija IV zahtevala
snaţnije kompjuterske sisteme, IBM je razvio modifikaciju APT-a IV nazvanu ADAPT, koja je
obavljala uobičajene funkcije sa dosta manje kompjuterske snage. Mnoge drţave su sledile primer
IBM-a, pa su tako nastale modifikacije IFAPT ( Francuska ), MINIAPT ( Nemačka ), FAPT ( Japan )
itd. Postojali su naravno i programski jezici van domena APT, npr. COMPACT II, AUTOSPOT,
CAMPI, AUTOPROMPT, SPLIT i mnogi drugi, koji su tada paralelno bili u upotrebi.
NC sistemi su sastavljeni od raznih modula, koji kroz sistem sprovode podatke u binarnom
obliku. Binarni oblik podrazumeva iskazivanje svih vrednosti pomoću kombinacija dve vrednosti – “0”
( stanje nula ili signal odsutan ) i “1” ( stanje jedinica ili signal prisutan ). Da bi se ostvarila dvosmerna
komunikacija izmeĎu ulaza i izlaza sistema, javlja se potreba da decimalne vrednosti budu preslikane u
binarne, ali i obrnuto, što se postiţe elektronskom obradom pomoću računara. Direktno preslikavanje
pomoću fizičkih veličina ( bušenom trakom ) prikazano je na slici 21.
Slika 21

SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 20 -
U levom delu slike 21 dat je prikaz brojeva opsega 1-10 u obliku koji je osim binarnog
primenljiv i na svaki drugi brojni sistem. Proizvoljan broj se predstavlja uopšteno za bilo koji sistem u
obliku:
N = anAn + an-1A
n-1 + an-2A
n-2 + ..... + a1A
1 + a0A
0 + a-1A
-1 + a-2A
-2 + ...... + a-mA
-m ,
gde je A – osnova brojnog sistema ( za binarni sistem A = 2 )
Karakteristični brojni sistemi koji se koriste ( pored binarnog i decimalnog ) su oktalni i
heksadecimalni. Uporedni prikaz najčešće korišćenih brojnih sistema dat je na slici 22.
Slika 22
Sa slike se vidi da je binarni zapis nekog broja uvek duţi, odnosno zahteva više cifara nego
zapis istog broja u ostalim sistemima, pa se u savremenoj digitalnoj tehnici za rad sa velikim brojevima
često koriste oktalni i heksadecimalni sistem ( naročito ovaj drugi ), čime se zapis mnogo skraćuje, a
oba sistema se brzo i lako prevode u binarni po potrebi.
Matematičke operacije se u okviru svakog brojnog sistema izvode po pravilima utvrĎenim za taj
sistem. Pošto računari inače koriste binarni sistem, razvijeni su mnogi kodovi koji omogućavaju vezu
izmeĎu decimalnog i binarnog sistema, kao što su npr. BCD – Binary Coded Decimal, EBCDI –
Extended Binary Coded Decimal Interchange itd.
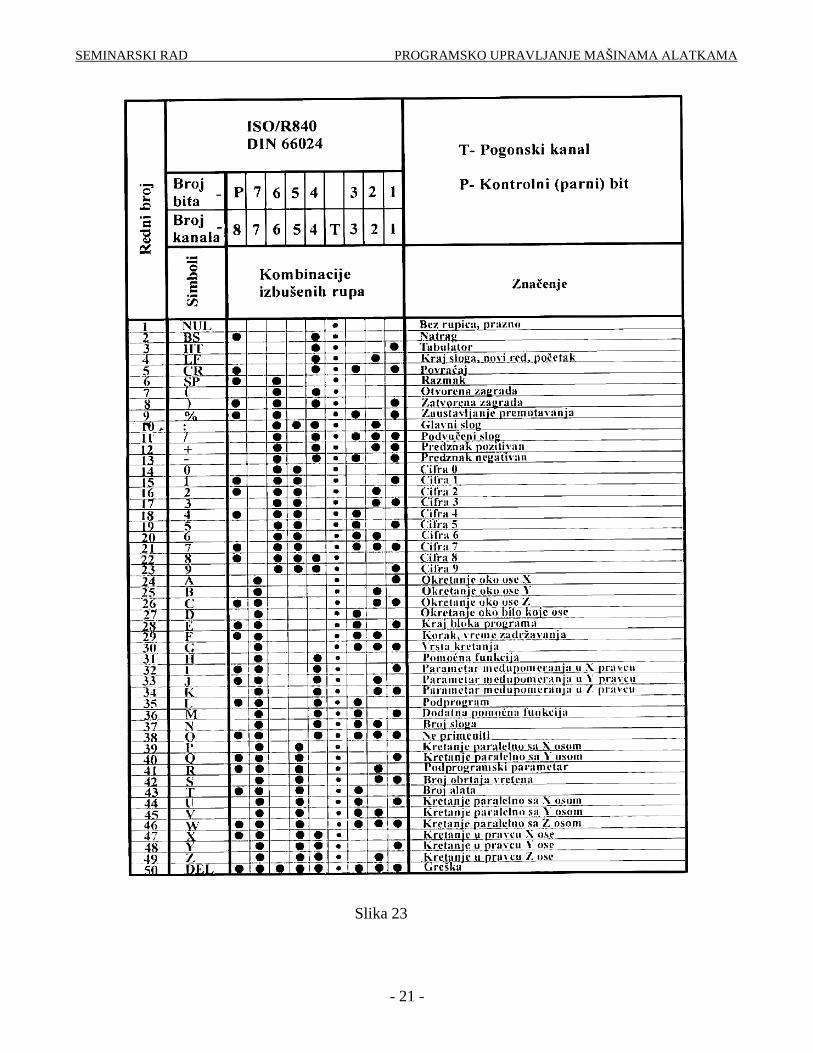
Kodiranje informacija koje se nanose na nosače je pojednostavljeno upotrebom standardnih
tabela kodova, od kojih su najpoznatije ISO/R840 ( DIN 66024 ) i EIA 224A ( Electronics Industries
Association ). Na slici 23 prikazana je tabela standardnih kodova ISO/R840. Sa slike se moţe primetiti
da su standardnim kodovima obuhvaćene sve osnovne cifre i znaci koji su potrebni za zapisivanje
uobičajenih programa, zatim kretanja u pravcu svake od tri ose, paralelna kretanja u odnosu na ose,
parametri meĎupomeranja po raznim pravcima, okretanja oko svake ose, brojevi obrtaja itd.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 21 -
Slika 23
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 22 -
U tehnologiji numeričkog upravljanja se koriste razne jedinice za odmeravanje količine
informacija. Najmanja jedinica se naziva bit. Ime je dobila stapanjem reči binary sa rečju digit, što u
prevodu znači binarna cifra. Bit moţe imati samo vrednost 1 ili vrednost 0, pa time opravdava ime.
Prva veća jedinica od bita je bajt ( eng. byte = ugriz ). Odnos izmeĎu bajta i bita je različit u različitim
NC sistemima. Ranije su naviše korišćeni četvorobitni ( 1 bajt = 4 bita ) i osmobitni sistemi ( 1 bajt = 8
bitova ), a danas je veliki broj sistema 16-bitni, dok su najsavremeniji 32-bitni i na kraju čak 64-bitni.
U svakom slučaju, bit predstavlja vrlo malu jedinicu, čak je i kilobajt ( 1024 bajtova ili 210
bitova kod
osmobitnih sistema ) skoro neupotrebljiva jedinica, pa se danas često koriste megabajt ( 1Mb = 103kb ),
i gigabajt ( 1Gb = 106kb ), a na pragu je i nova jedinica terabajt ( 1Tb = 10
9kb ), koja je za sadašnje
pojmove vrlo velika i retko se koristi.
Osnovna razlika izmeĎu klasičnih sistema programskog upravljanja i NC sistema je u načinu
sprovoĎenja upravljanja. Kod klasičnih sistema program upravljanja se sprovodi putem graničnika i
krivulja, pa je sistem prilično krut u tom pogledu, dok se kod NC sistema sprovodi putem kodiranog
programa, koji se vrlo lako definiše, koriguje i menja. Promena upravljačkog programa se kod
klasičnih sistema izvodi uglavnom fizičkim pomeranjem ili zamenom raznih elemenata sistema, a kod
numeričkih je dovoljno uneti izmene u postavljeni programski kod ili napisati novi.
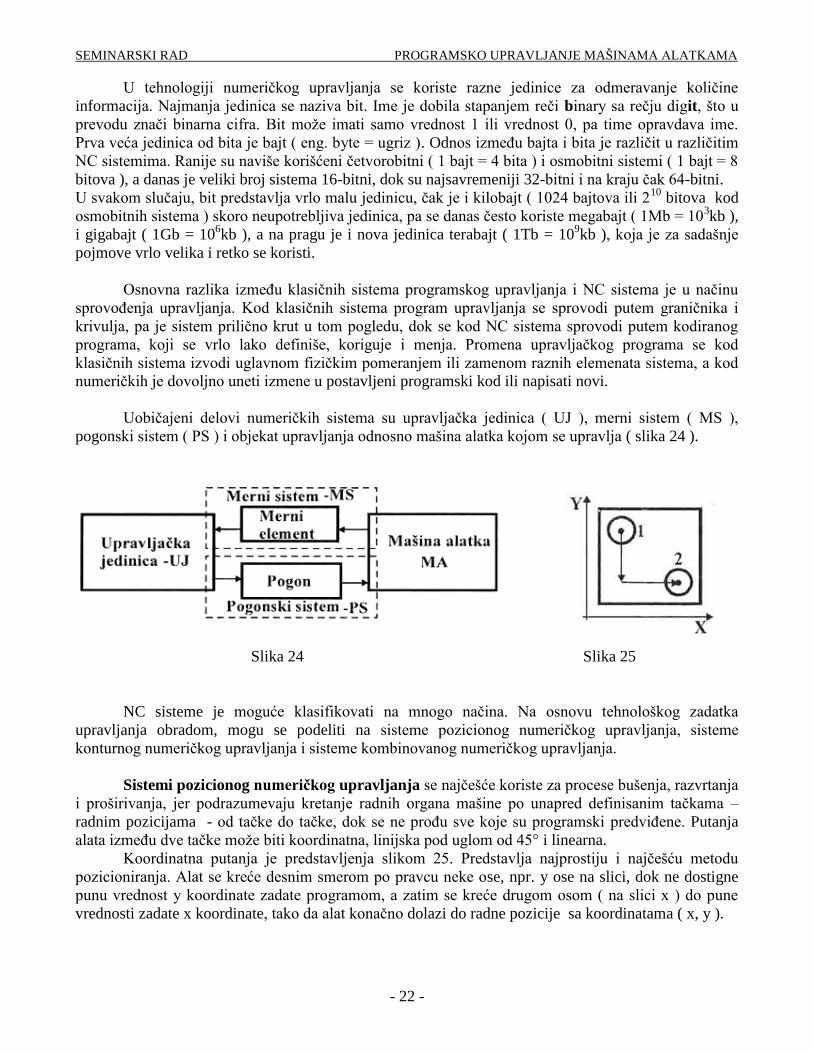
Uobičajeni delovi numeričkih sistema su upravljačka jedinica ( UJ ), merni sistem ( MS ),
pogonski sistem ( PS ) i objekat upravljanja odnosno mašina alatka kojom se upravlja ( slika 24 ).
Slika 24 Slika 25
NC sisteme je moguće klasifikovati na mnogo načina. Na osnovu tehnološkog zadatka
upravljanja obradom, mogu se podeliti na sisteme pozicionog numeričkog upravljanja, sisteme
konturnog numeričkog upravljanja i sisteme kombinovanog numeričkog upravljanja.
Sistemi pozicionog numeriĉkog upravljanja se najčešće koriste za procese bušenja, razvrtanja
i proširivanja, jer podrazumevaju kretanje radnih organa mašine po unapred definisanim tačkama –
radnim pozicijama - od tačke do tačke, dok se ne proĎu sve koje su programski predviĎene. Putanja
alata izmeĎu dve tačke moţe biti koordinatna, linijska pod uglom od 45° i linearna.
Koordinatna putanja je predstavljenja slikom 25. Predstavlja najprostiju i najčešću metodu
pozicioniranja. Alat se kreće desnim smerom po pravcu neke ose, npr. y ose na slici, dok ne dostigne
punu vrednost y koordinate zadate programom, a zatim se kreće drugom osom ( na slici x ) do pune
vrednosti zadate x koordinate, tako da alat konačno dolazi do radne pozicije sa koordinatama ( x, y ).
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 23 -
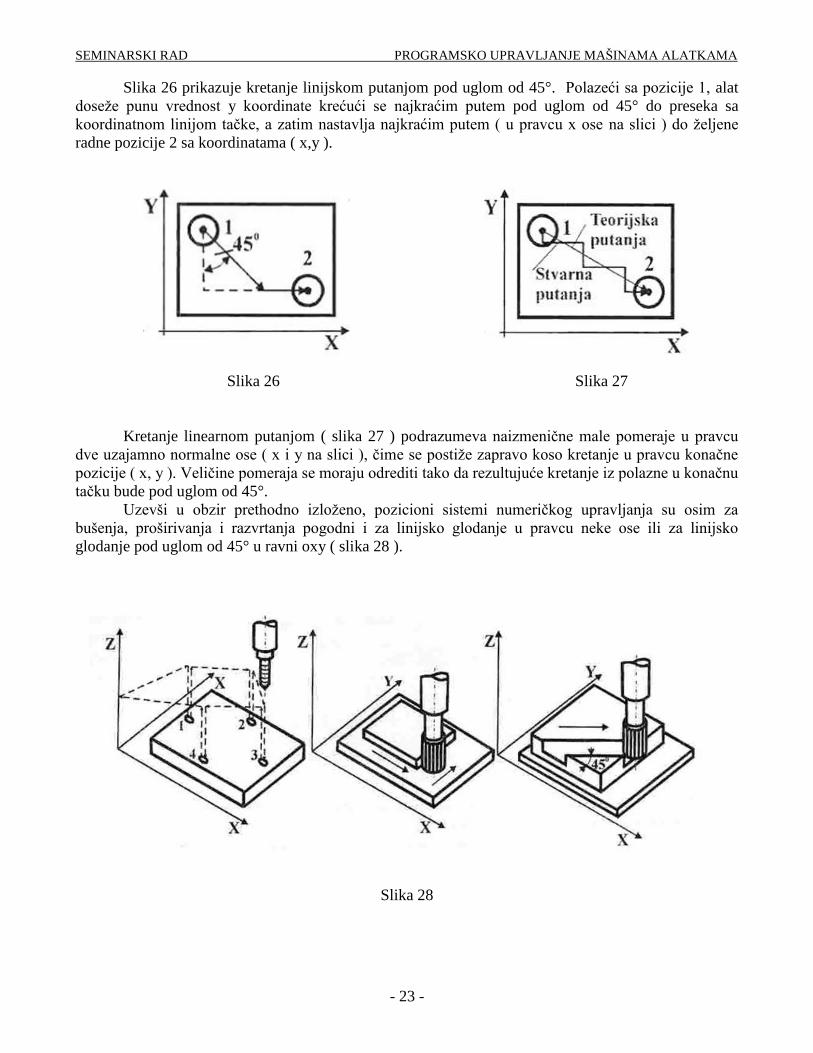
Slika 26 prikazuje kretanje linijskom putanjom pod uglom od 45°. Polazeći sa pozicije 1, alat
doseţe punu vrednost y koordinate krećući se najkraćim putem pod uglom od 45° do preseka sa
koordinatnom linijom tačke, a zatim nastavlja najkraćim putem ( u pravcu x ose na slici ) do ţeljene
radne pozicije 2 sa koordinatama ( x,y ).
Slika 26 Slika 27
Kretanje linearnom putanjom ( slika 27 ) podrazumeva naizmenične male pomeraje u pravcu
dve uzajamno normalne ose ( x i y na slici ), čime se postiţe zapravo koso kretanje u pravcu konačne
pozicije ( x, y ). Veličine pomeraja se moraju odrediti tako da rezultujuće kretanje iz polazne u konačnu
tačku bude pod uglom od 45°.
Uzevši u obzir prethodno izloţeno, pozicioni sistemi numeričkog upravljanja su osim za
bušenja, proširivanja i razvrtanja pogodni i za linijsko glodanje u pravcu neke ose ili za linijsko
glodanje pod uglom od 45° u ravni oxy ( slika 28 ).
Slika 28
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 24 -
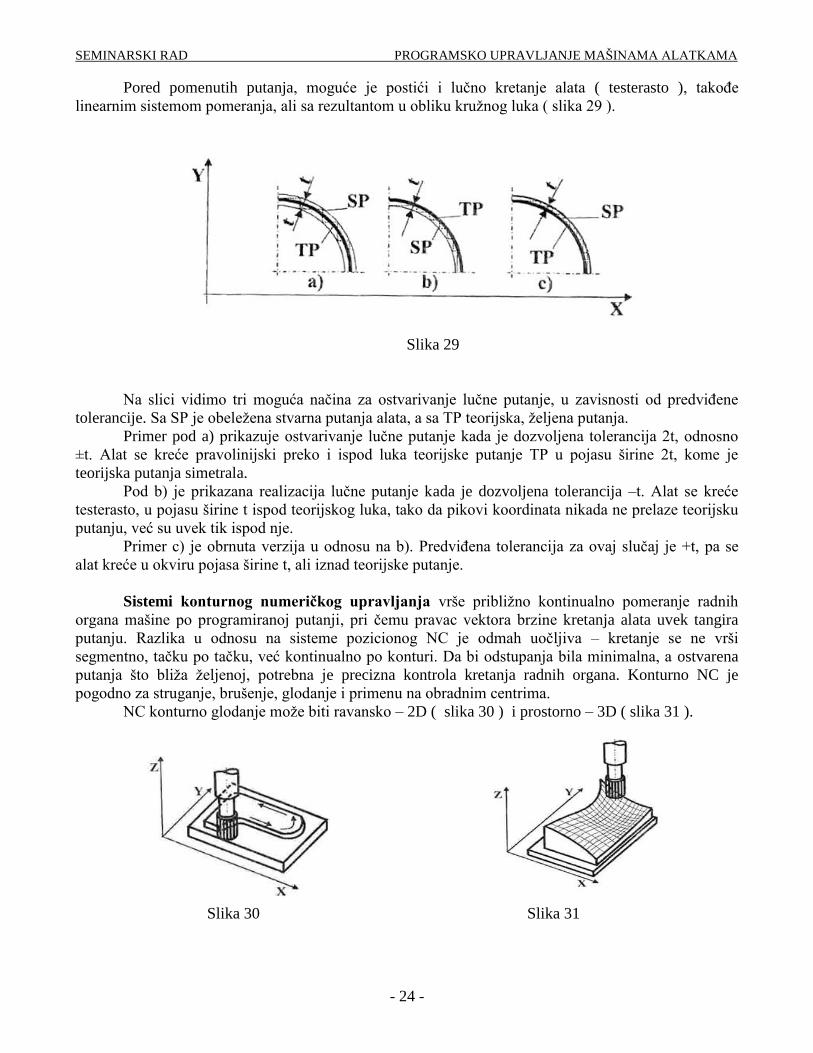
Pored pomenutih putanja, moguće je postići i lučno kretanje alata ( testerasto ), takoĎe
linearnim sistemom pomeranja, ali sa rezultantom u obliku kruţnog luka ( slika 29 ).
Slika 29
Na slici vidimo tri moguća načina za ostvarivanje lučne putanje, u zavisnosti od predviĎene
tolerancije. Sa SP je obeleţena stvarna putanja alata, a sa TP teorijska, ţeljena putanja.
Primer pod a) prikazuje ostvarivanje lučne putanje kada je dozvoljena tolerancija 2t, odnosno
±t. Alat se kreće pravolinijski preko i ispod luka teorijske putanje TP u pojasu širine 2t, kome je
teorijska putanja simetrala.
Pod b) je prikazana realizacija lučne putanje kada je dozvoljena tolerancija –t. Alat se kreće
testerasto, u pojasu širine t ispod teorijskog luka, tako da pikovi koordinata nikada ne prelaze teorijsku
putanju, već su uvek tik ispod nje.
Primer c) je obrnuta verzija u odnosu na b). PredviĎena tolerancija za ovaj slučaj je +t, pa se
alat kreće u okviru pojasa širine t, ali iznad teorijske putanje.
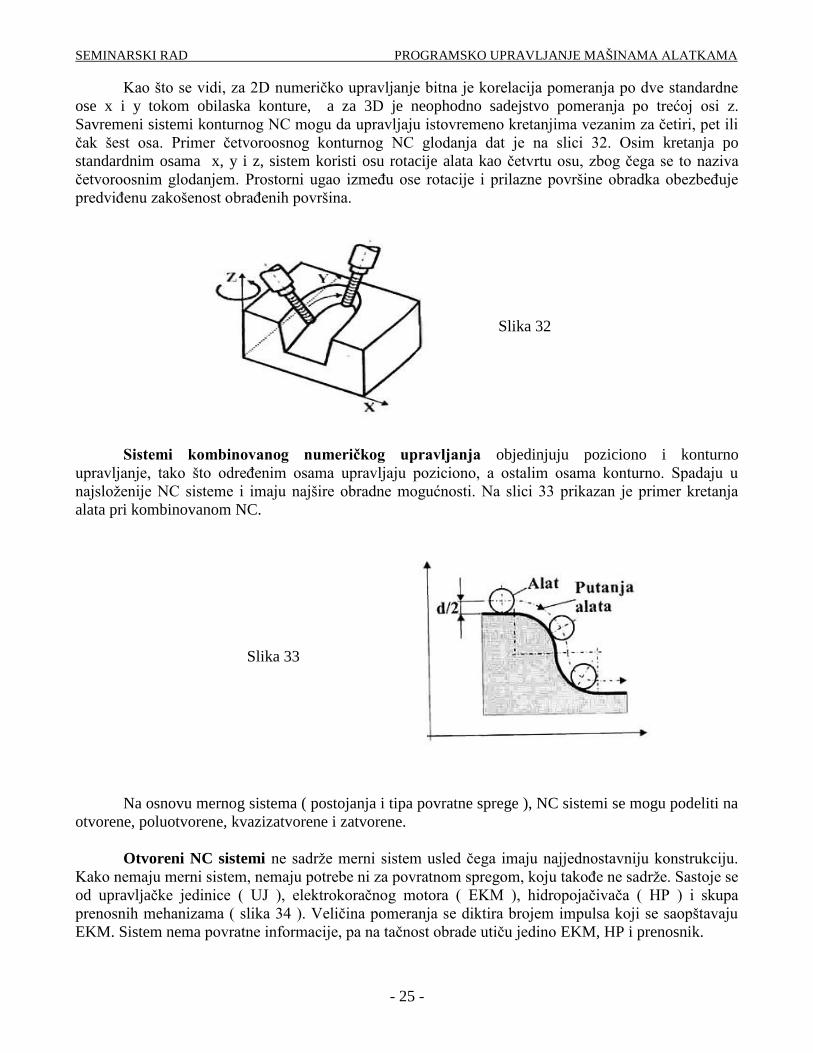
Sistemi konturnog numeriĉkog upravljanja vrše pribliţno kontinualno pomeranje radnih
organa mašine po programiranoj putanji, pri čemu pravac vektora brzine kretanja alata uvek tangira
putanju. Razlika u odnosu na sisteme pozicionog NC je odmah uočljiva – kretanje se ne vrši
segmentno, tačku po tačku, već kontinualno po konturi. Da bi odstupanja bila minimalna, a ostvarena
putanja što bliţa ţeljenoj, potrebna je precizna kontrola kretanja radnih organa. Konturno NC je
pogodno za struganje, brušenje, glodanje i primenu na obradnim centrima.
NC konturno glodanje moţe biti ravansko – 2D ( slika 30 ) i prostorno – 3D ( slika 31 ).
Slika 30 Slika 31
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 25 -
Kao što se vidi, za 2D numeričko upravljanje bitna je korelacija pomeranja po dve standardne
ose x i y tokom obilaska konture, a za 3D je neophodno sadejstvo pomeranja po trećoj osi z.
Savremeni sistemi konturnog NC mogu da upravljaju istovremeno kretanjima vezanim za četiri, pet ili
čak šest osa. Primer četvoroosnog konturnog NC glodanja dat je na slici 32. Osim kretanja po
standardnim osama x, y i z, sistem koristi osu rotacije alata kao četvrtu osu, zbog čega se to naziva
četvoroosnim glodanjem. Prostorni ugao izmeĎu ose rotacije i prilazne površine obradka obezbeĎuje
predviĎenu zakošenost obraĎenih površina.
Slika 32
Sistemi kombinovanog numeriĉkog upravljanja objedinjuju poziciono i konturno
upravljanje, tako što odreĎenim osama upravljaju poziciono, a ostalim osama konturno. Spadaju u
najsloţenije NC sisteme i imaju najšire obradne mogućnosti. Na slici 33 prikazan je primer kretanja
alata pri kombinovanom NC.
Slika 33
Na osnovu mernog sistema ( postojanja i tipa povratne sprege ), NC sistemi se mogu podeliti na
otvorene, poluotvorene, kvazizatvorene i zatvorene.
Otvoreni NC sistemi ne sadrţe merni sistem usled čega imaju najjednostavniju konstrukciju.
Kako nemaju merni sistem, nemaju potrebe ni za povratnom spregom, koju takoĎe ne sadrţe. Sastoje se
od upravljačke jedinice ( UJ ), elektrokoračnog motora ( EKM ), hidropojačivača ( HP ) i skupa
prenosnih mehanizama ( slika 34 ). Veličina pomeranja se diktira brojem impulsa koji se saopštavaju
EKM. Sistem nema povratne informacije, pa na tačnost obrade utiču jedino EKM, HP i prenosnik.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 26 -
Slika 34
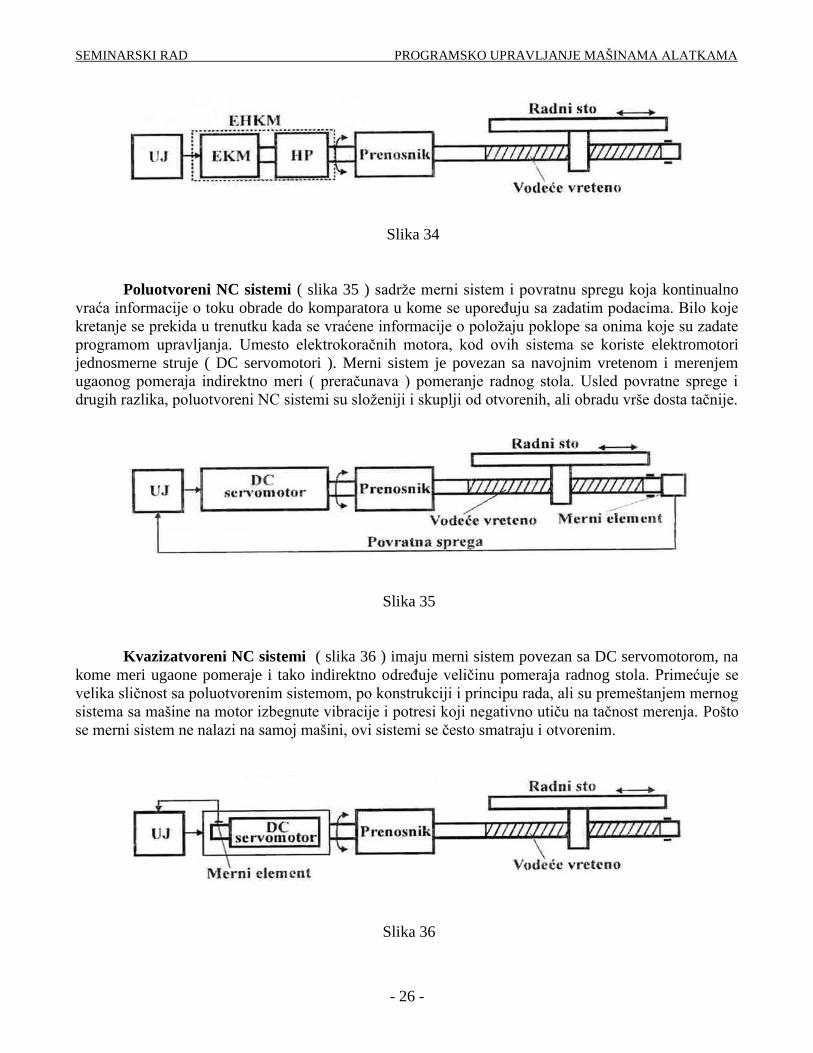
Poluotvoreni NC sistemi ( slika 35 ) sadrţe merni sistem i povratnu spregu koja kontinualno
vraća informacije o toku obrade do komparatora u kome se uporeĎuju sa zadatim podacima. Bilo koje
kretanje se prekida u trenutku kada se vraćene informacije o poloţaju poklope sa onima koje su zadate
programom upravljanja. Umesto elektrokoračnih motora, kod ovih sistema se koriste elektromotori
jednosmerne struje ( DC servomotori ). Merni sistem je povezan sa navojnim vretenom i merenjem
ugaonog pomeraja indirektno meri ( preračunava ) pomeranje radnog stola. Usled povratne sprege i
drugih razlika, poluotvoreni NC sistemi su sloţeniji i skuplji od otvorenih, ali obradu vrše dosta tačnije.
Slika 35
Kvazizatvoreni NC sistemi ( slika 36 ) imaju merni sistem povezan sa DC servomotorom, na
kome meri ugaone pomeraje i tako indirektno odreĎuje veličinu pomeraja radnog stola. Primećuje se
velika sličnost sa poluotvorenim sistemom, po konstrukciji i principu rada, ali su premeštanjem mernog
sistema sa mašine na motor izbegnute vibracije i potresi koji negativno utiču na tačnost merenja. Pošto
se merni sistem ne nalazi na samoj mašini, ovi sistemi se često smatraju i otvorenim.
Slika 36
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 27 -
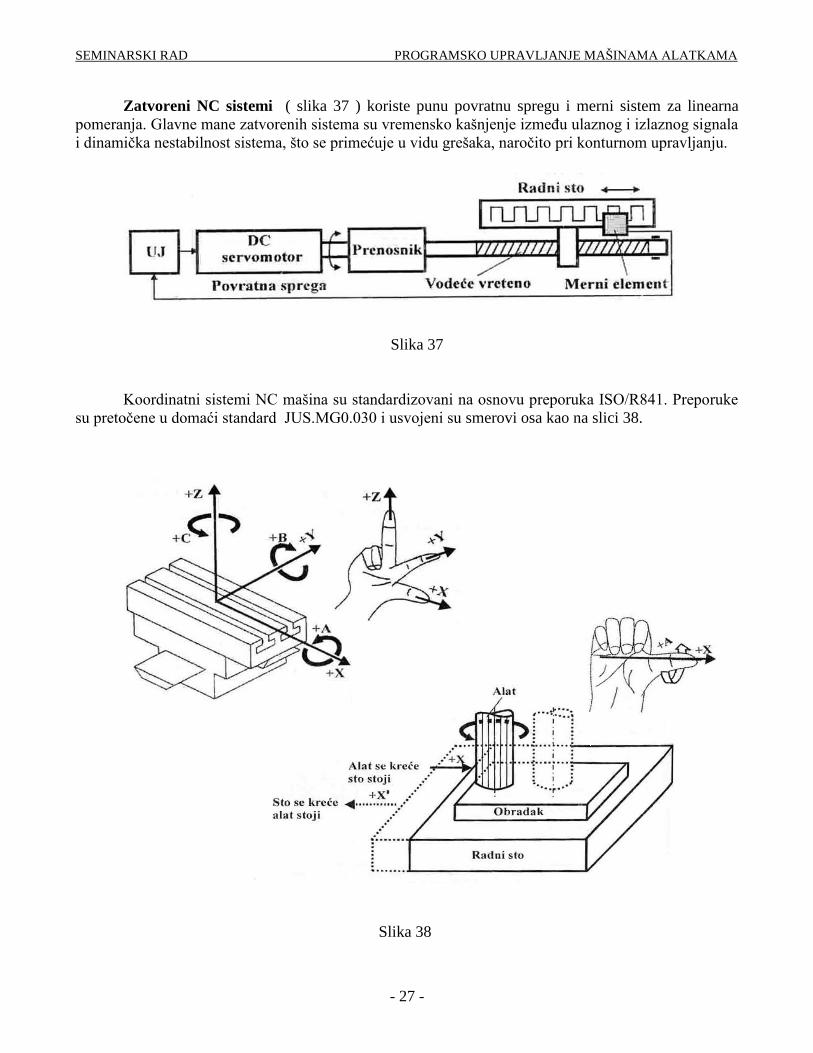
Zatvoreni NC sistemi ( slika 37 ) koriste punu povratnu spregu i merni sistem za linearna
pomeranja. Glavne mane zatvorenih sistema su vremensko kašnjenje izmeĎu ulaznog i izlaznog signala
i dinamička nestabilnost sistema, što se primećuje u vidu grešaka, naročito pri konturnom upravljanju.
Slika 37
Koordinatni sistemi NC mašina su standardizovani na osnovu preporuka ISO/R841. Preporuke
su pretočene u domaći standard JUS.MG0.030 i usvojeni su smerovi osa kao na slici 38.
Slika 38
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 28 -
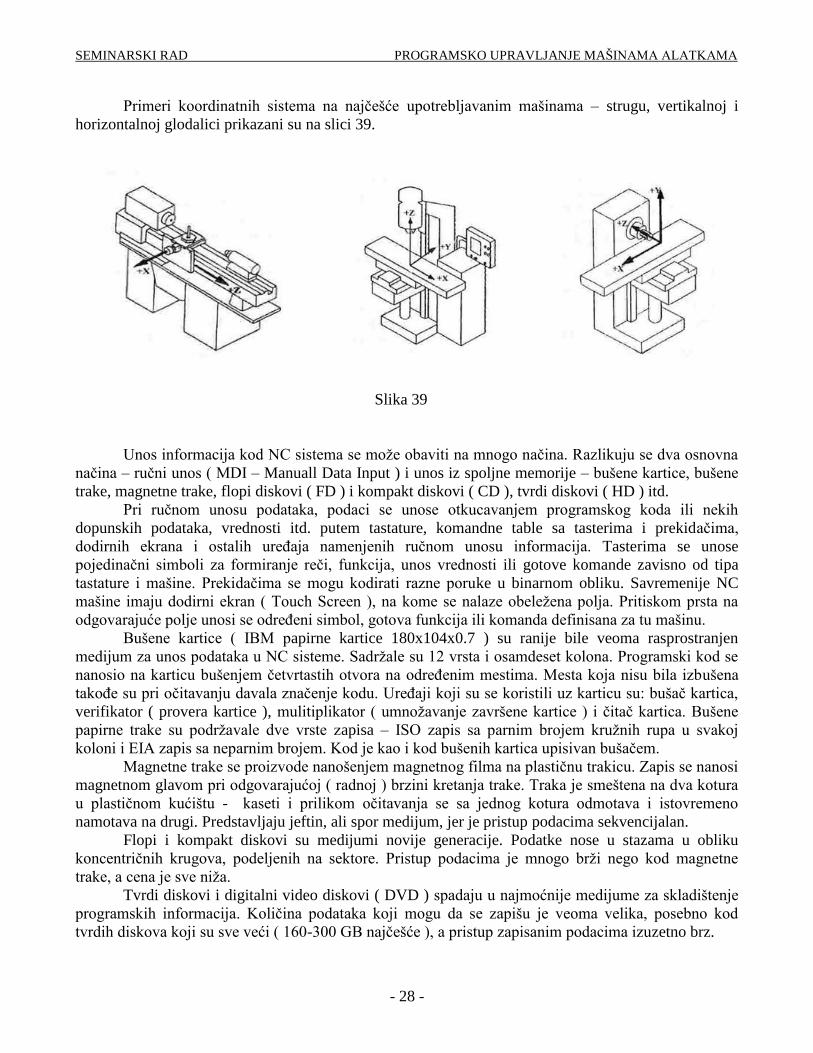
Primeri koordinatnih sistema na najčešće upotrebljavanim mašinama – strugu, vertikalnoj i
horizontalnoj glodalici prikazani su na slici 39.
Slika 39
Unos informacija kod NC sistema se moţe obaviti na mnogo načina. Razlikuju se dva osnovna
načina – ručni unos ( MDI – Manuall Data Input ) i unos iz spoljne memorije – bušene kartice, bušene
trake, magnetne trake, flopi diskovi ( FD ) i kompakt diskovi ( CD ), tvrdi diskovi ( HD ) itd.
Pri ručnom unosu podataka, podaci se unose otkucavanjem programskog koda ili nekih
dopunskih podataka, vrednosti itd. putem tastature, komandne table sa tasterima i prekidačima,
dodirnih ekrana i ostalih ureĎaja namenjenih ručnom unosu informacija. Tasterima se unose
pojedinačni simboli za formiranje reči, funkcija, unos vrednosti ili gotove komande zavisno od tipa
tastature i mašine. Prekidačima se mogu kodirati razne poruke u binarnom obliku. Savremenije NC
mašine imaju dodirni ekran ( Touch Screen ), na kome se nalaze obeleţena polja. Pritiskom prsta na
odgovarajuće polje unosi se odreĎeni simbol, gotova funkcija ili komanda definisana za tu mašinu.
Bušene kartice ( IBM papirne kartice 180x104x0.7 ) su ranije bile veoma rasprostranjen
medijum za unos podataka u NC sisteme. Sadrţale su 12 vrsta i osamdeset kolona. Programski kod se
nanosio na karticu bušenjem četvrtastih otvora na odreĎenim mestima. Mesta koja nisu bila izbušena
takoĎe su pri očitavanju davala značenje kodu. UreĎaji koji su se koristili uz karticu su: bušač kartica,
verifikator ( provera kartice ), mulitiplikator ( umnoţavanje završene kartice ) i čitač kartica. Bušene
papirne trake su podrţavale dve vrste zapisa – ISO zapis sa parnim brojem kruţnih rupa u svakoj
koloni i EIA zapis sa neparnim brojem. Kod je kao i kod bušenih kartica upisivan bušačem.
Magnetne trake se proizvode nanošenjem magnetnog filma na plastičnu trakicu. Zapis se nanosi
magnetnom glavom pri odgovarajućoj ( radnoj ) brzini kretanja trake. Traka je smeštena na dva kotura
u plastičnom kućištu - kaseti i prilikom očitavanja se sa jednog kotura odmotava i istovremeno
namotava na drugi. Predstavljaju jeftin, ali spor medijum, jer je pristup podacima sekvencijalan.
Flopi i kompakt diskovi su medijumi novije generacije. Podatke nose u stazama u obliku
koncentričnih krugova, podeljenih na sektore. Pristup podacima je mnogo brţi nego kod magnetne
trake, a cena je sve niţa.
Tvrdi diskovi i digitalni video diskovi ( DVD ) spadaju u najmoćnije medijume za skladištenje
programskih informacija. Količina podataka koji mogu da se zapišu je veoma velika, posebno kod
tvrdih diskova koji su sve veći ( 160-300 GB najčešće ), a pristup zapisanim podacima izuzetno brz.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 29 -
V NIVOI NUMERIĈKOG UPRAVLJANJA
Prema načinu ostvarenja numeričko upravljanje moţe biti konvencionalno ( NC – Numerical
Control ), kompjuterizovano ( CNC – Computer Numerical Control ) i direktno ( DNC – Direct
Numerical Control ).
5.1 KONVENCIONALNO NUMERIĈKO UPRAVLJANJE
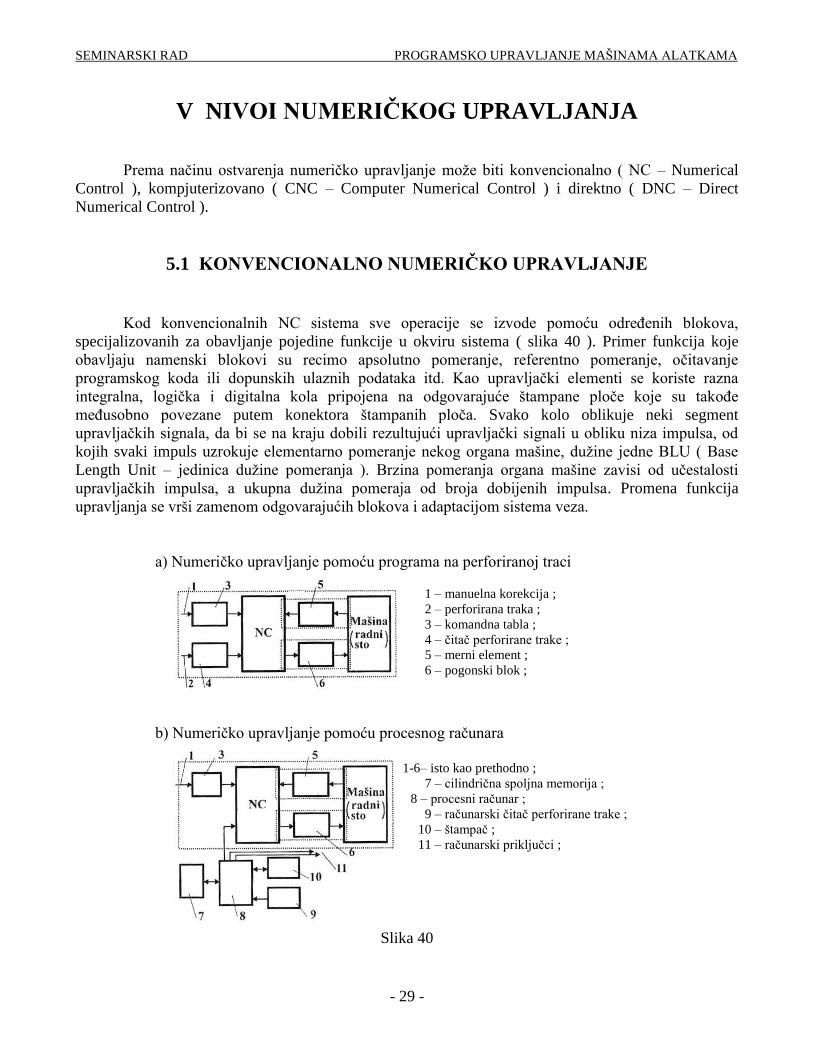
Kod konvencionalnih NC sistema sve operacije se izvode pomoću odreĎenih blokova,
specijalizovanih za obavljanje pojedine funkcije u okviru sistema ( slika 40 ). Primer funkcija koje
obavljaju namenski blokovi su recimo apsolutno pomeranje, referentno pomeranje, očitavanje
programskog koda ili dopunskih ulaznih podataka itd. Kao upravljački elementi se koriste razna
integralna, logička i digitalna kola pripojena na odgovarajuće štampane ploče koje su takoĎe
meĎusobno povezane putem konektora štampanih ploča. Svako kolo oblikuje neki segment
upravljačkih signala, da bi se na kraju dobili rezultujući upravljački signali u obliku niza impulsa, od
kojih svaki impuls uzrokuje elementarno pomeranje nekog organa mašine, duţine jedne BLU ( Base
Length Unit – jedinica duţine pomeranja ). Brzina pomeranja organa mašine zavisi od učestalosti
upravljačkih impulsa, a ukupna duţina pomeraja od broja dobijenih impulsa. Promena funkcija
upravljanja se vrši zamenom odgovarajućih blokova i adaptacijom sistema veza.
a) Numeričko upravljanje pomoću programa na perforiranoj traci
1 – manuelna korekcija ;
2 – perforirana traka ;
3 – komandna tabla ;
4 – čitač perforirane trake ;
5 – merni element ;
6 – pogonski blok ;
b) Numeričko upravljanje pomoću procesnog računara
1-6– isto kao prethodno ;
7 – cilindrična spoljna memorija ;
8 – procesni računar ;
9 – računarski čitač perforirane trake ;
10 – štampač ;
11 – računarski priključci ;
Slika 40
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 30 -
Konvencionalni NC sistemi su bili aktuelni u periodu 1954. godine do ranih sedamdesetih istog
veka. Po strukturi su čisto hardverski, a mogućnosti su im ograničene na jednostavnije funkcije kao što
su linearna i kruţna interpolacija, apsolutno i relativno pozicioniranje, prepoznavanje koda itd.
U globalnom smislu, konvencionalni NC sistemi predstavljaju pretke svih današnjih NC
sistema i čvrst temelj na kome su postepeno graĎene sve sloţenije i moćnije strukture.
5.2 KOMPJUTERIZOVANO NUMERIĈKO UPRAVLJANJE
Kompjuterizovani NC sistemi ( CNC sistemi ) koriste za upravljanje kompjutere koji sprovode
zadati programski kod ( softver ) smešten u memoriji kompjutera. Veliki broj hardverskih kola kojima
su se odlikovali konvencionalni NC sistemi je nadomešten softverskim rešenjima kod CNC sistema,
tako da je dobar deo hardvera izbačen iz upotrebe. Upravljački signali CNC su definisani kao binarne
16,32 ili 64- bitne reči, zavisno od procesora kompjutera koji se koristi u sistemu.
Po pojavi prvih CNC sistema, ranih sedamdesetih godina prošlog veka, konvencionalni NC
sistemi su postepeno zastarevali ( u korist CNC ) sve dok nisu potpuno prestali da se proizvode.
Softverska konfiguracija CNC je nudila brţu i pouzdaniju implementaciju programa, mogućnost unosa
preko tastature, čitača magnetne trake, RS-232 C komunikacionih ureĎaja i raznih drajvova spoljnih
memorija ( Floppy Disc Drive - FDD, Compact Disc Drive – CDD, Zipp Disc Drive - ZDD itd. ).
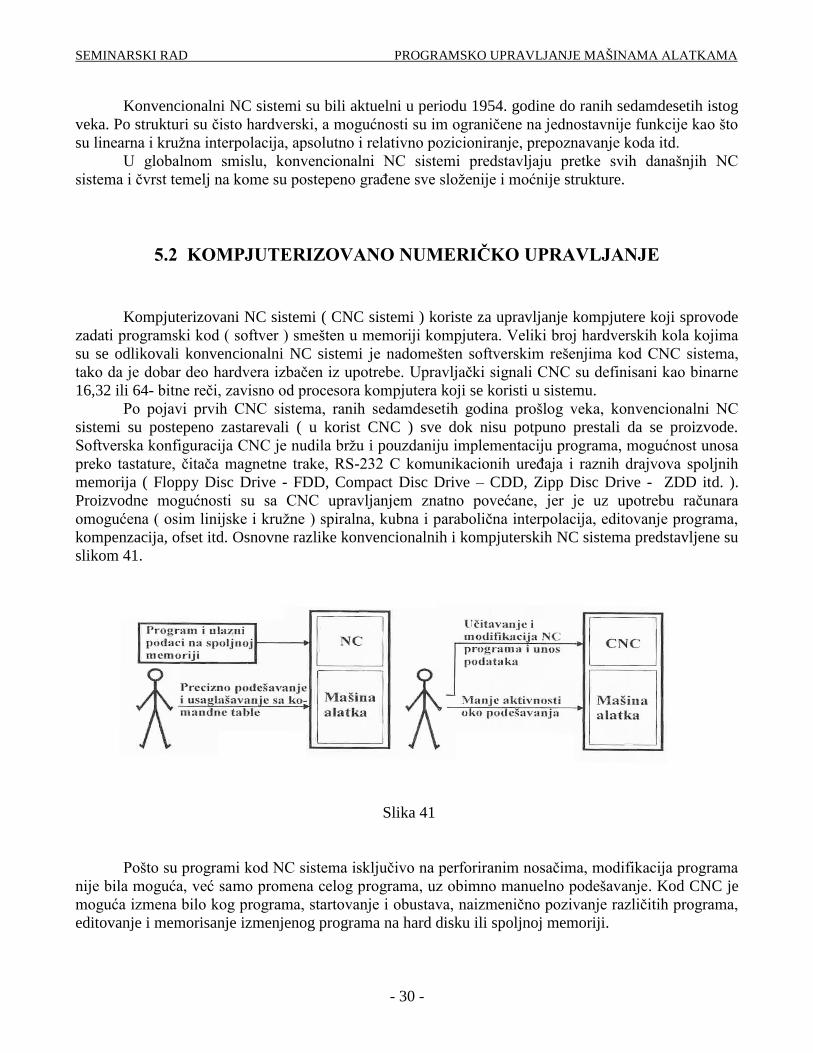
Proizvodne mogućnosti su sa CNC upravljanjem znatno povećane, jer je uz upotrebu računara
omogućena ( osim linijske i kruţne ) spiralna, kubna i parabolična interpolacija, editovanje programa,
kompenzacija, ofset itd. Osnovne razlike konvencionalnih i kompjuterskih NC sistema predstavljene su
slikom 41.
Slika 41
Pošto su programi kod NC sistema isključivo na perforiranim nosačima, modifikacija programa
nije bila moguća, već samo promena celog programa, uz obimno manuelno podešavanje. Kod CNC je
moguća izmena bilo kog programa, startovanje i obustava, naizmenično pozivanje različitih programa,
editovanje i memorisanje izmenjenog programa na hard disku ili spoljnoj memoriji.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 31 -
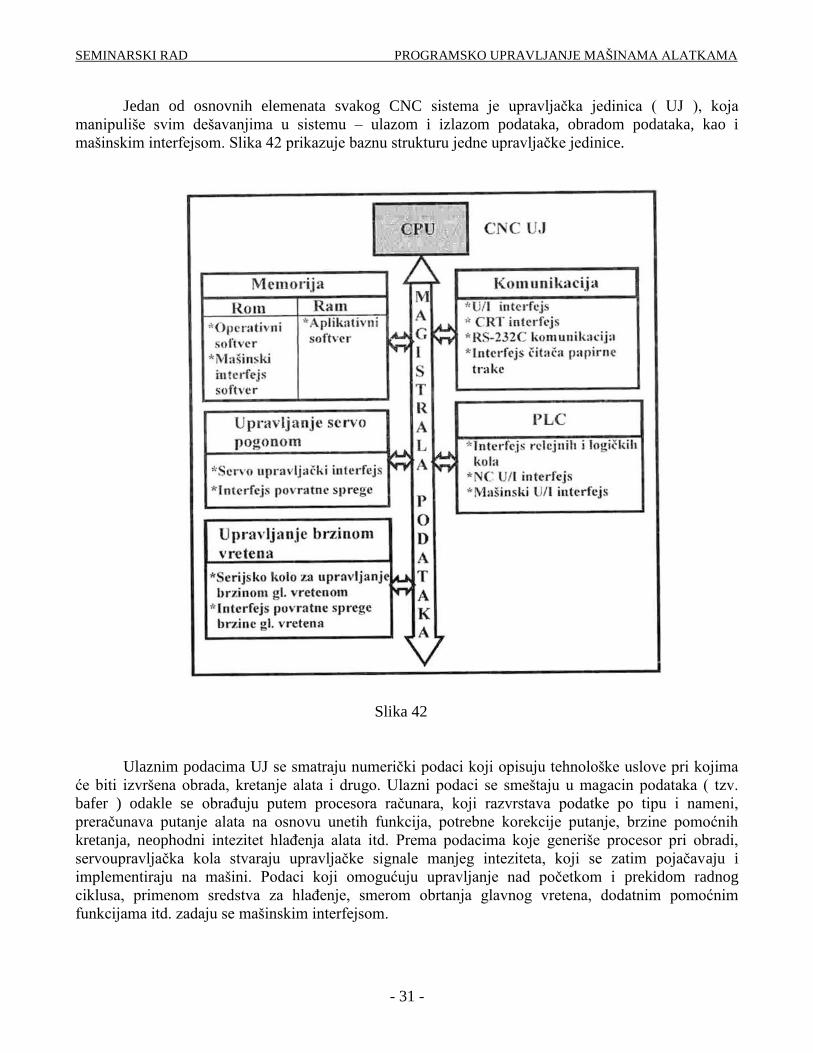
Jedan od osnovnih elemenata svakog CNC sistema je upravljačka jedinica ( UJ ), koja
manipuliše svim dešavanjima u sistemu – ulazom i izlazom podataka, obradom podataka, kao i
mašinskim interfejsom. Slika 42 prikazuje baznu strukturu jedne upravljačke jedinice.
Slika 42
Ulaznim podacima UJ se smatraju numerički podaci koji opisuju tehnološke uslove pri kojima
će biti izvršena obrada, kretanje alata i drugo. Ulazni podaci se smeštaju u magacin podataka ( tzv.
bafer ) odakle se obraĎuju putem procesora računara, koji razvrstava podatke po tipu i nameni,
preračunava putanje alata na osnovu unetih funkcija, potrebne korekcije putanje, brzine pomoćnih
kretanja, neophodni intezitet hlaĎenja alata itd. Prema podacima koje generiše procesor pri obradi,
servoupravljačka kola stvaraju upravljačke signale manjeg inteziteta, koji se zatim pojačavaju i
implementiraju na mašini. Podaci koji omogućuju upravljanje nad početkom i prekidom radnog
ciklusa, primenom sredstva za hlaĎenje, smerom obrtanja glavnog vretena, dodatnim pomoćnim
funkcijama itd. zadaju se mašinskim interfejsom.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 32 -
Elementi koji sačinjavaju jednu UJ su centralna procesorska jedinica ( CPU ), memorija, modul
za upravljanje servopogonom, modul za upravljanje brzinom glavnog vretena, modul za komunikaciju i
programabilni logički kontroler ( Programmable Logic Controler ).
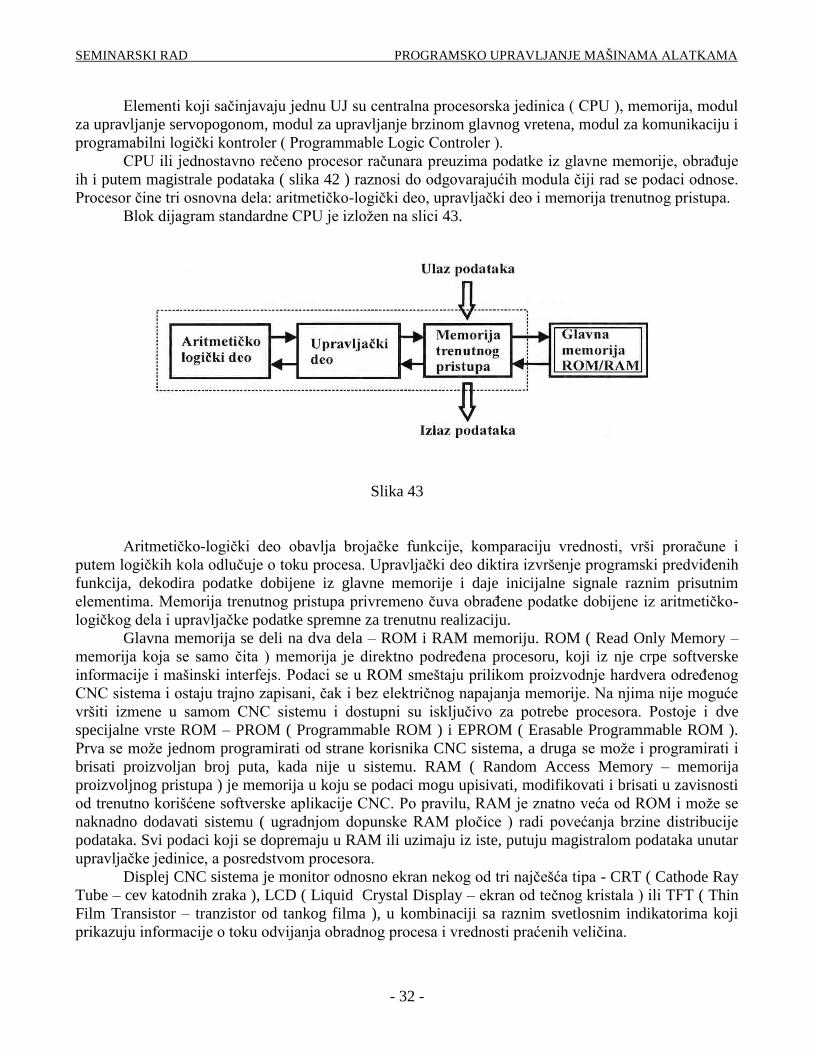
CPU ili jednostavno rečeno procesor računara preuzima podatke iz glavne memorije, obraĎuje
ih i putem magistrale podataka ( slika 42 ) raznosi do odgovarajućih modula čiji rad se podaci odnose.
Procesor čine tri osnovna dela: aritmetičko-logički deo, upravljački deo i memorija trenutnog pristupa.
Blok dijagram standardne CPU je izloţen na slici 43.
Slika 43
Aritmetičko-logički deo obavlja brojačke funkcije, komparaciju vrednosti, vrši proračune i
putem logičkih kola odlučuje o toku procesa. Upravljački deo diktira izvršenje programski predviĎenih
funkcija, dekodira podatke dobijene iz glavne memorije i daje inicijalne signale raznim prisutnim
elementima. Memorija trenutnog pristupa privremeno čuva obraĎene podatke dobijene iz aritmetičko-
logičkog dela i upravljačke podatke spremne za trenutnu realizaciju.
Glavna memorija se deli na dva dela – ROM i RAM memoriju. ROM ( Read Only Memory –
memorija koja se samo čita ) memorija je direktno podreĎena procesoru, koji iz nje crpe softverske
informacije i mašinski interfejs. Podaci se u ROM smeštaju prilikom proizvodnje hardvera odreĎenog
CNC sistema i ostaju trajno zapisani, čak i bez električnog napajanja memorije. Na njima nije moguće
vršiti izmene u samom CNC sistemu i dostupni su isključivo za potrebe procesora. Postoje i dve
specijalne vrste ROM – PROM ( Programmable ROM ) i EPROM ( Erasable Programmable ROM ).
Prva se moţe jednom programirati od strane korisnika CNC sistema, a druga se moţe i programirati i
brisati proizvoljan broj puta, kada nije u sistemu. RAM ( Random Access Memory – memorija
proizvoljnog pristupa ) je memorija u koju se podaci mogu upisivati, modifikovati i brisati u zavisnosti
od trenutno korišćene softverske aplikacije CNC. Po pravilu, RAM je znatno veća od ROM i moţe se
naknadno dodavati sistemu ( ugradnjom dopunske RAM pločice ) radi povećanja brzine distribucije
podataka. Svi podaci koji se dopremaju u RAM ili uzimaju iz iste, putuju magistralom podataka unutar
upravljačke jedinice, a posredstvom procesora.
Displej CNC sistema je monitor odnosno ekran nekog od tri najčešća tipa - CRT ( Cathode Ray
Tube – cev katodnih zraka ), LCD ( Liquid Crystal Display – ekran od tečnog kristala ) ili TFT ( Thin
Film Transistor – tranzistor od tankog filma ), u kombinaciji sa raznim svetlosnim indikatorima koji
prikazuju informacije o toku odvijanja obradnog procesa i vrednosti praćenih veličina.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 33 -
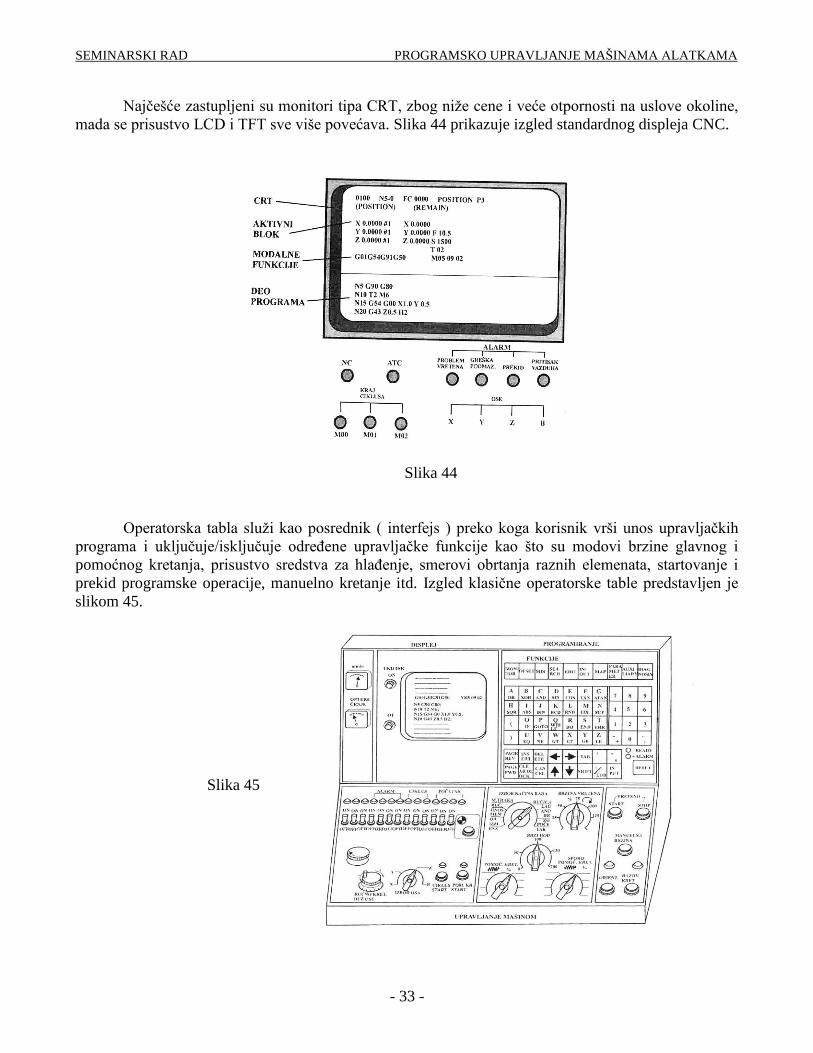
Najčešće zastupljeni su monitori tipa CRT, zbog niţe cene i veće otpornosti na uslove okoline,
mada se prisustvo LCD i TFT sve više povećava. Slika 44 prikazuje izgled standardnog displeja CNC.
Slika 44
Operatorska tabla sluţi kao posrednik ( interfejs ) preko koga korisnik vrši unos upravljačkih
programa i uključuje/isključuje odreĎene upravljačke funkcije kao što su modovi brzine glavnog i
pomoćnog kretanja, prisustvo sredstva za hlaĎenje, smerovi obrtanja raznih elemenata, startovanje i
prekid programske operacije, manuelno kretanje itd. Izgled klasične operatorske table predstavljen je
slikom 45.
Slika 45
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 34 -
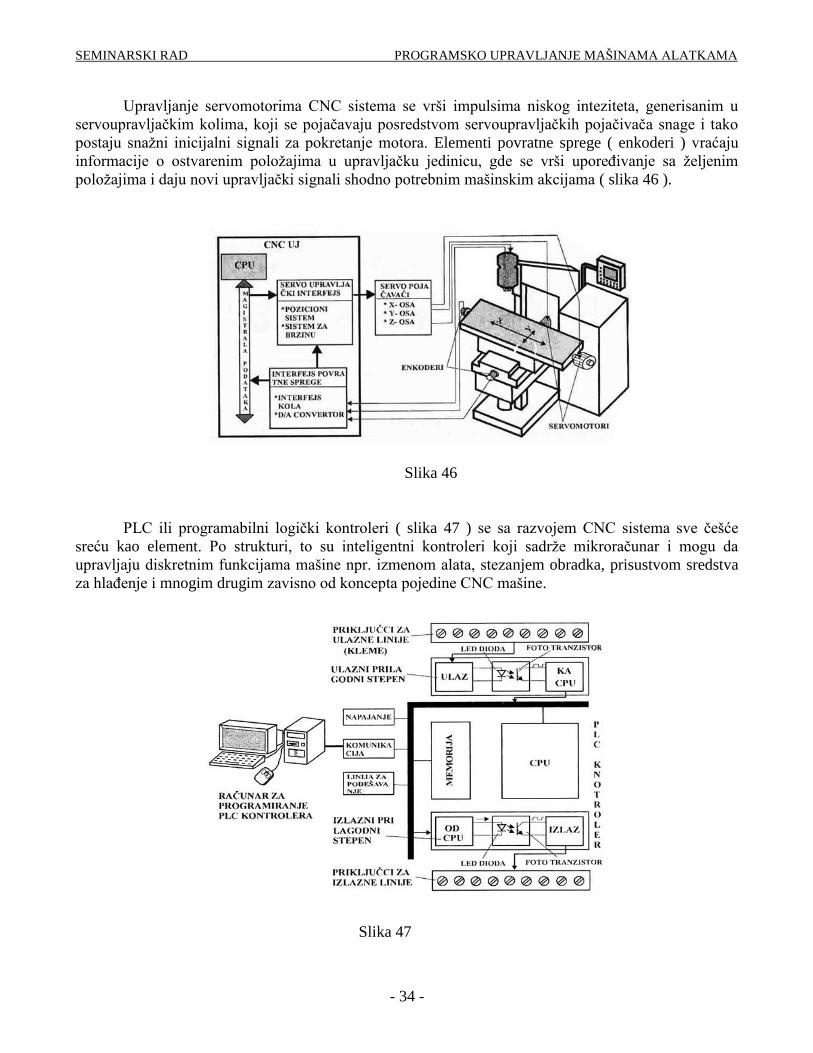
Upravljanje servomotorima CNC sistema se vrši impulsima niskog inteziteta, generisanim u
servoupravljačkim kolima, koji se pojačavaju posredstvom servoupravljačkih pojačivača snage i tako
postaju snaţni inicijalni signali za pokretanje motora. Elementi povratne sprege ( enkoderi ) vraćaju
informacije o ostvarenim poloţajima u upravljačku jedinicu, gde se vrši uporeĎivanje sa ţeljenim
poloţajima i daju novi upravljački signali shodno potrebnim mašinskim akcijama ( slika 46 ).
Slika 46
PLC ili programabilni logički kontroleri ( slika 47 ) se sa razvojem CNC sistema sve češće
sreću kao element. Po strukturi, to su inteligentni kontroleri koji sadrţe mikroračunar i mogu da
upravljaju diskretnim funkcijama mašine npr. izmenom alata, stezanjem obradka, prisustvom sredstva
za hlaĎenje i mnogim drugim zavisno od koncepta pojedine CNC mašine.
Slika 47
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 35 -
CPU mikroračunara PLC obezbeĎuje komunikaciju svih ostalih delova, upravlja memorijom,
obraĎuje ulazne podatke PLC i definiše izlazne. Identifikacija stanja PLC se obično izvodi na osnovu
rada svetlećih dioda – indikatora. U memoriji PLC smešten je operativni sistem i korisnički program.
Ranije je bila EPROM tipa, dok se danas koristi FLASH ( memorijski štapići ). PLC sadrţi električno
napajanje koje obezbeĎuje jednosmerni napon 24V ili 220V naizmeničnog napona kod većine
kontrolera. Ulazne podatke PLC prikuplja pomoću raznih senzora i detektora kojima prati kretanje
mehanizama, prisustvo i poloţaj obradka, nivo sredstva za hlaĎenje itd. Izlazni ureĎaji PLC su najčešće
motori i releji koji na osnovu signala PLC proizvode odreĎenu akciju.
Programiranje PLC se izvodi pomoću računara ili ručnim programatorom ( konzolom ). Laptop
računarima se PLC vrlo jednostavno programiraju na licu mesta, u samoj fabrici.
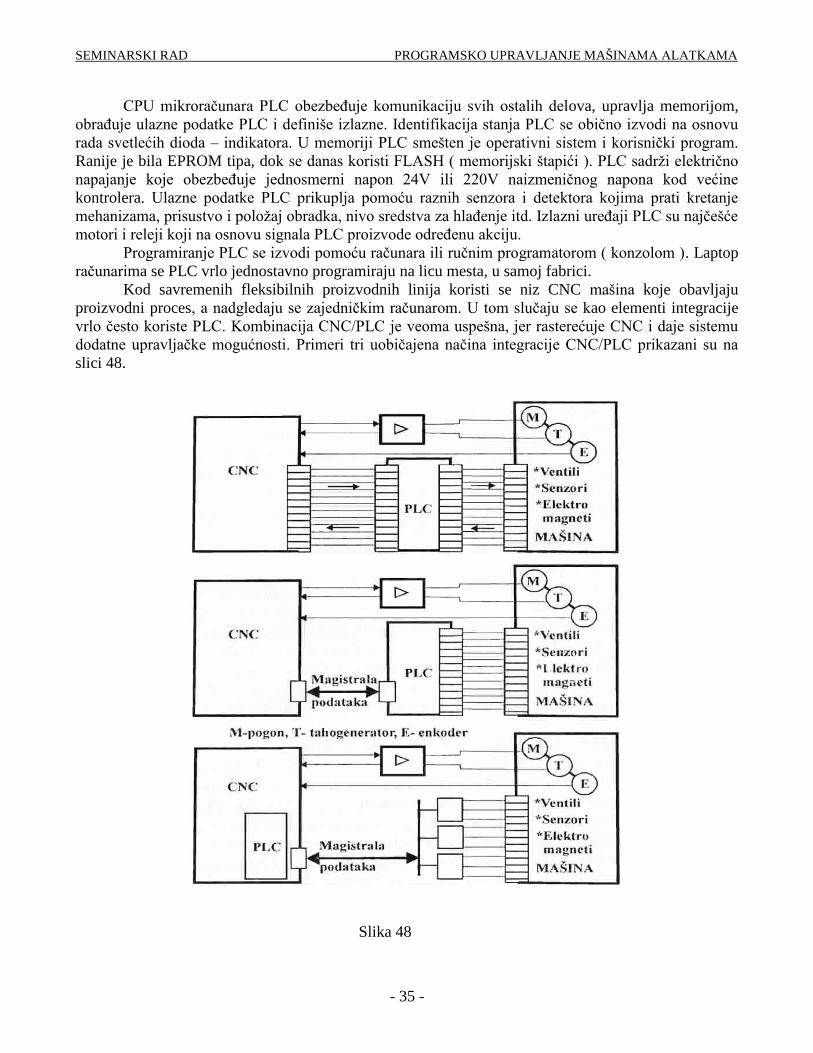
Kod savremenih fleksibilnih proizvodnih linija koristi se niz CNC mašina koje obavljaju
proizvodni proces, a nadgledaju se zajedničkim računarom. U tom slučaju se kao elementi integracije
vrlo često koriste PLC. Kombinacija CNC/PLC je veoma uspešna, jer rasterećuje CNC i daje sistemu
dodatne upravljačke mogućnosti. Primeri tri uobičajena načina integracije CNC/PLC prikazani su na
slici 48.
Slika 48
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 36 -
Prvi način povećava funkcionalnost mašine postavljanjem PLC izmeĎu mašine i CNC, tako da
se celokupna razmena informacija vrši putem odogovarajućih modula CNC/PLC. Drugi način
podrazumeva slično rešenje, ali se izmeĎu CNC i PLC nalazi magistrala podataka sa većim
komunikacijskim mogućnostima. Treće rešenje je najkompleksnije – PLC je integrisan u samom CNC,
uzajamna komunikacija se obavlja korišćenjem izvršnih programa, a komunikacija sa mašinom ide
preko magistrale podataka. U najsavremenijim sistemima se koristi kombinacija PLC integrisanog u
CNC uz dopunske PLC na magistrali podataka ( više PLC ).
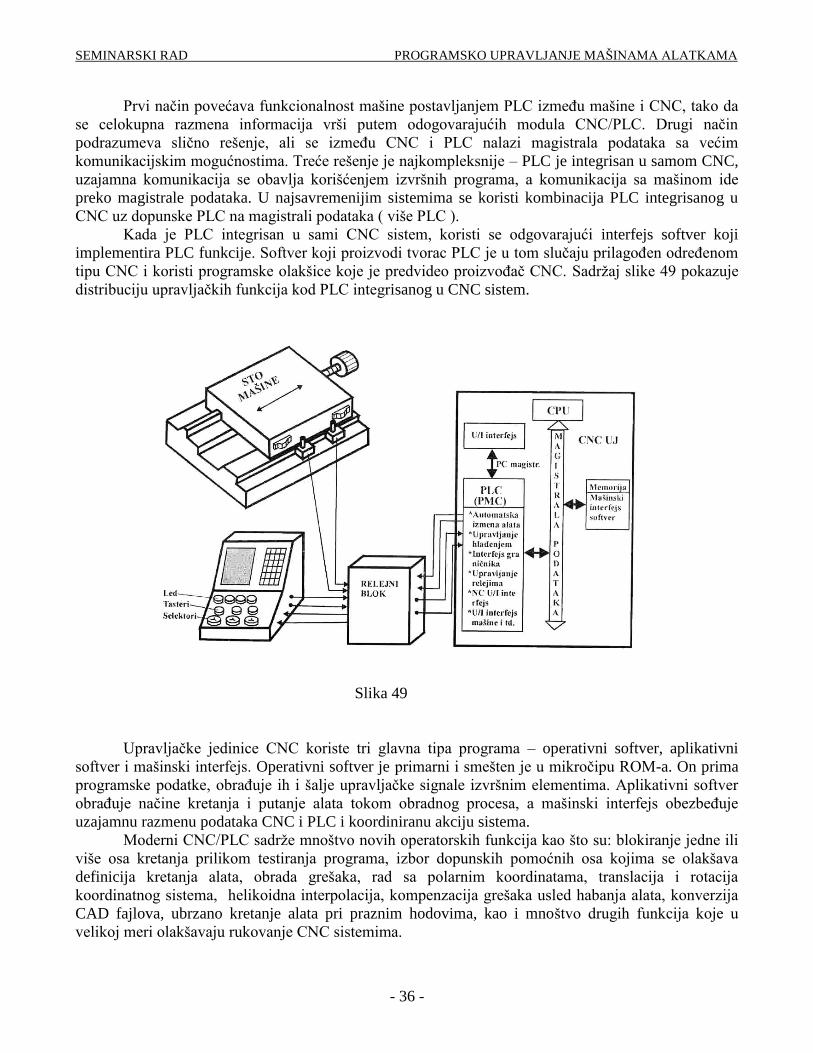
Kada je PLC integrisan u sami CNC sistem, koristi se odgovarajući interfejs softver koji
implementira PLC funkcije. Softver koji proizvodi tvorac PLC je u tom slučaju prilagoĎen odreĎenom
tipu CNC i koristi programske olakšice koje je predvideo proizvoĎač CNC. Sadrţaj slike 49 pokazuje
distribuciju upravljačkih funkcija kod PLC integrisanog u CNC sistem.
Slika 49
Upravljačke jedinice CNC koriste tri glavna tipa programa – operativni softver, aplikativni
softver i mašinski interfejs. Operativni softver je primarni i smešten je u mikročipu ROM-a. On prima
programske podatke, obraĎuje ih i šalje upravljačke signale izvršnim elementima. Aplikativni softver
obraĎuje načine kretanja i putanje alata tokom obradnog procesa, a mašinski interfejs obezbeĎuje
uzajamnu razmenu podataka CNC i PLC i koordiniranu akciju sistema.
Moderni CNC/PLC sadrţe mnoštvo novih operatorskih funkcija kao što su: blokiranje jedne ili
više osa kretanja prilikom testiranja programa, izbor dopunskih pomoćnih osa kojima se olakšava
definicija kretanja alata, obrada grešaka, rad sa polarnim koordinatama, translacija i rotacija
koordinatnog sistema, helikoidna interpolacija, kompenzacija grešaka usled habanja alata, konverzija
CAD fajlova, ubrzano kretanje alata pri praznim hodovima, kao i mnoštvo drugih funkcija koje u
velikoj meri olakšavaju rukovanje CNC sistemima.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 37 -
5.3 DIREKTNO NUMERIĈKO UPRAVLJANJE
Sistemi direktnog numeričkog upravljanja ( DNC ) su nastali na temelju komunikacije podataka
u računarskim mreţama. Dve osnovne vrste DNC su prisutne u današnjem okruţenju – DNC sa
direktnim upravljanjem i DNC sa distributivnim upravljanjem.
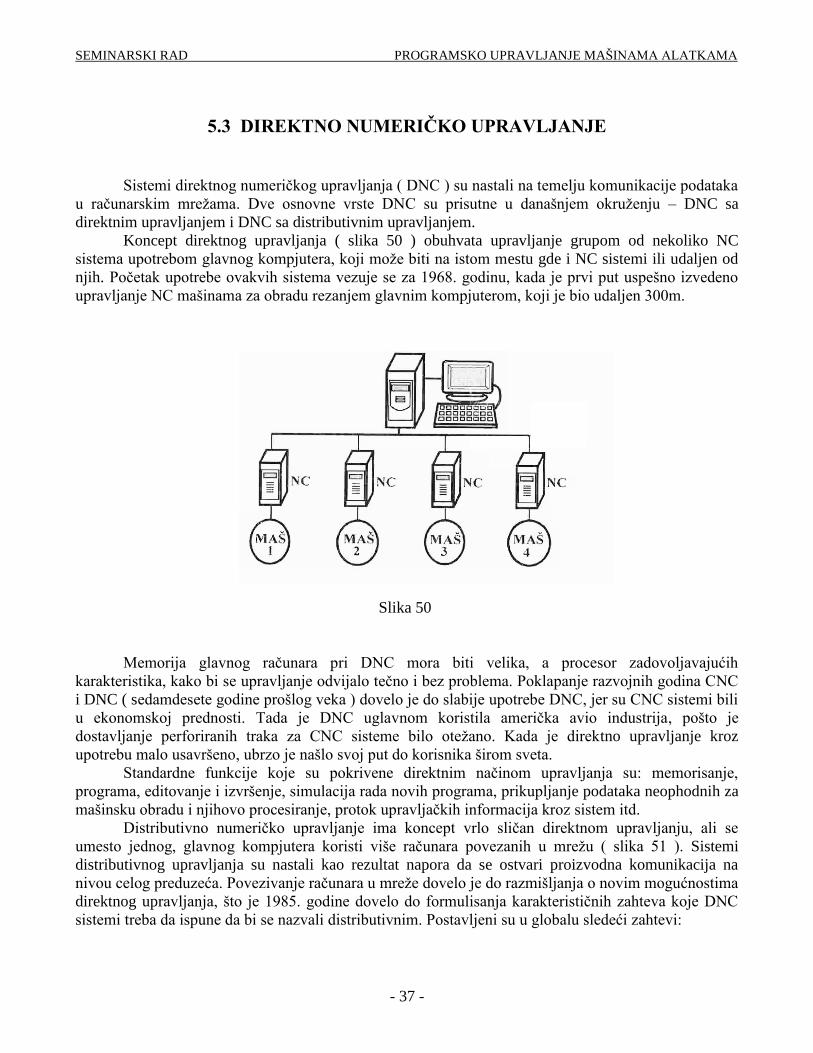
Koncept direktnog upravljanja ( slika 50 ) obuhvata upravljanje grupom od nekoliko NC
sistema upotrebom glavnog kompjutera, koji moţe biti na istom mestu gde i NC sistemi ili udaljen od
njih. Početak upotrebe ovakvih sistema vezuje se za 1968. godinu, kada je prvi put uspešno izvedeno
upravljanje NC mašinama za obradu rezanjem glavnim kompjuterom, koji je bio udaljen 300m.
Slika 50
Memorija glavnog računara pri DNC mora biti velika, a procesor zadovoljavajućih
karakteristika, kako bi se upravljanje odvijalo tečno i bez problema. Poklapanje razvojnih godina CNC
i DNC ( sedamdesete godine prošlog veka ) dovelo je do slabije upotrebe DNC, jer su CNC sistemi bili
u ekonomskoj prednosti. Tada je DNC uglavnom koristila američka avio industrija, pošto je
dostavljanje perforiranih traka za CNC sisteme bilo oteţano. Kada je direktno upravljanje kroz
upotrebu malo usavršeno, ubrzo je našlo svoj put do korisnika širom sveta.
Standardne funkcije koje su pokrivene direktnim načinom upravljanja su: memorisanje,
programa, editovanje i izvršenje, simulacija rada novih programa, prikupljanje podataka neophodnih za
mašinsku obradu i njihovo procesiranje, protok upravljačkih informacija kroz sistem itd.
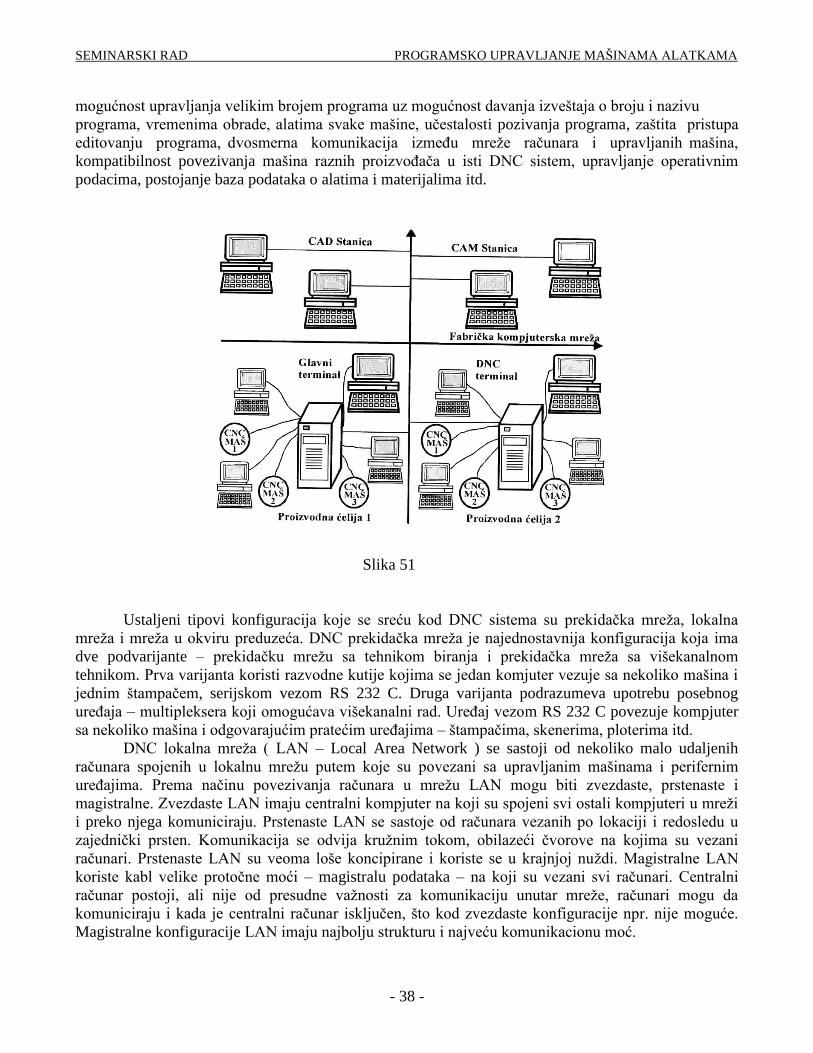
Distributivno numeričko upravljanje ima koncept vrlo sličan direktnom upravljanju, ali se
umesto jednog, glavnog kompjutera koristi više računara povezanih u mreţu ( slika 51 ). Sistemi
distributivnog upravljanja su nastali kao rezultat napora da se ostvari proizvodna komunikacija na
nivou celog preduzeća. Povezivanje računara u mreţe dovelo je do razmišljanja o novim mogućnostima
direktnog upravljanja, što je 1985. godine dovelo do formulisanja karakterističnih zahteva koje DNC
sistemi treba da ispune da bi se nazvali distributivnim. Postavljeni su u globalu sledeći zahtevi:
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 38 -
mogućnost upravljanja velikim brojem programa uz mogućnost davanja izveštaja o broju i nazivu
programa, vremenima obrade, alatima svake mašine, učestalosti pozivanja programa, zaštita pristupa
editovanju programa, dvosmerna komunikacija izmeĎu mreţe računara i upravljanih mašina,
kompatibilnost povezivanja mašina raznih proizvoĎača u isti DNC sistem, upravljanje operativnim
podacima, postojanje baza podataka o alatima i materijalima itd.
Slika 51
Ustaljeni tipovi konfiguracija koje se sreću kod DNC sistema su prekidačka mreţa, lokalna
mreţa i mreţa u okviru preduzeća. DNC prekidačka mreţa je najednostavnija konfiguracija koja ima
dve podvarijante – prekidačku mreţu sa tehnikom biranja i prekidačka mreţa sa višekanalnom
tehnikom. Prva varijanta koristi razvodne kutije kojima se jedan komjuter vezuje sa nekoliko mašina i
jednim štampačem, serijskom vezom RS 232 C. Druga varijanta podrazumeva upotrebu posebnog
ureĎaja – multipleksera koji omogućava višekanalni rad. UreĎaj vezom RS 232 C povezuje kompjuter
sa nekoliko mašina i odgovarajućim pratećim ureĎajima – štampačima, skenerima, ploterima itd.
DNC lokalna mreţa ( LAN – Local Area Network ) se sastoji od nekoliko malo udaljenih
računara spojenih u lokalnu mreţu putem koje su povezani sa upravljanim mašinama i perifernim
ureĎajima. Prema načinu povezivanja računara u mreţu LAN mogu biti zvezdaste, prstenaste i
magistralne. Zvezdaste LAN imaju centralni kompjuter na koji su spojeni svi ostali kompjuteri u mreţi
i preko njega komuniciraju. Prstenaste LAN se sastoje od računara vezanih po lokaciji i redosledu u
zajednički prsten. Komunikacija se odvija kruţnim tokom, obilazeći čvorove na kojima su vezani
računari. Prstenaste LAN su veoma loše koncipirane i koriste se u krajnjoj nuţdi. Magistralne LAN
koriste kabl velike protočne moći – magistralu podataka – na koji su vezani svi računari. Centralni
računar postoji, ali nije od presudne vaţnosti za komunikaciju unutar mreţe, računari mogu da
komuniciraju i kada je centralni računar isključen, što kod zvezdaste konfiguracije npr. nije moguće.
Magistralne konfiguracije LAN imaju najbolju strukturu i najveću komunikacionu moć.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 39 -
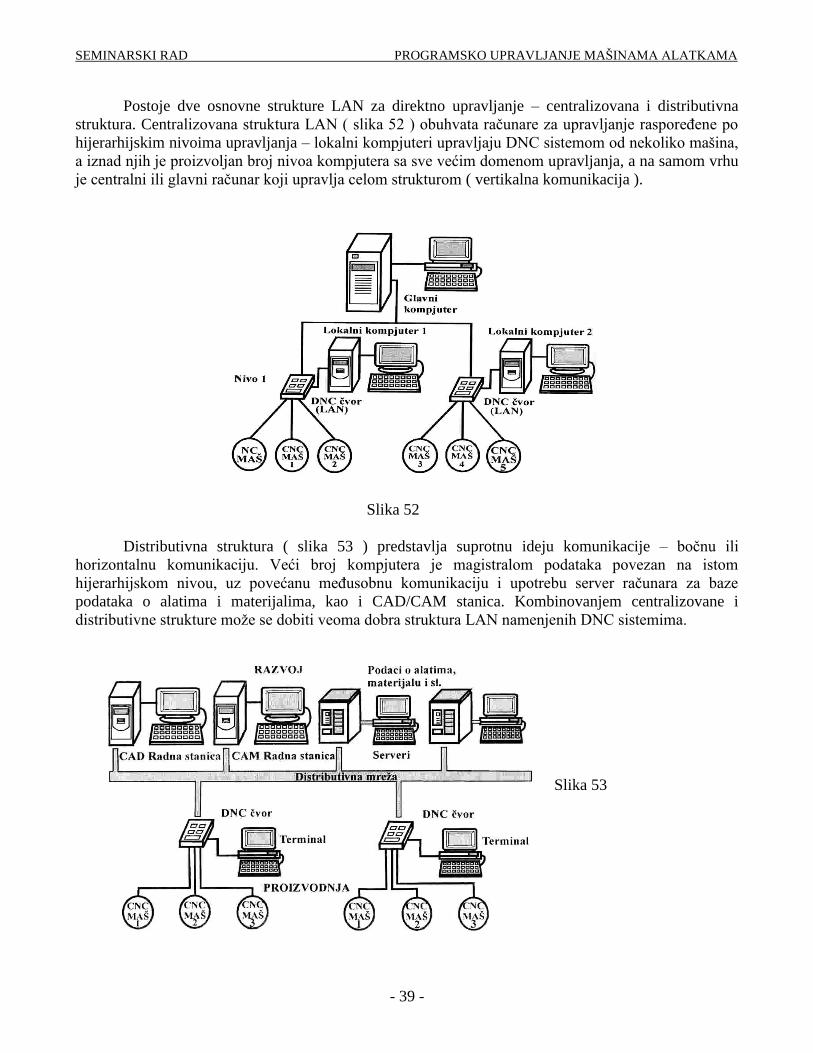
Postoje dve osnovne strukture LAN za direktno upravljanje – centralizovana i distributivna
struktura. Centralizovana struktura LAN ( slika 52 ) obuhvata računare za upravljanje rasporeĎene po
hijerarhijskim nivoima upravljanja – lokalni kompjuteri upravljaju DNC sistemom od nekoliko mašina,
a iznad njih je proizvoljan broj nivoa kompjutera sa sve većim domenom upravljanja, a na samom vrhu
je centralni ili glavni računar koji upravlja celom strukturom ( vertikalna komunikacija ).
Slika 52
Distributivna struktura ( slika 53 ) predstavlja suprotnu ideju komunikacije – bočnu ili
horizontalnu komunikaciju. Veći broj kompjutera je magistralom podataka povezan na istom
hijerarhijskom nivou, uz povećanu meĎusobnu komunikaciju i upotrebu server računara za baze
podataka o alatima i materijalima, kao i CAD/CAM stanica. Kombinovanjem centralizovane i
distributivne strukture moţe se dobiti veoma dobra struktura LAN namenjenih DNC sistemima.
Slika 53
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 40 -
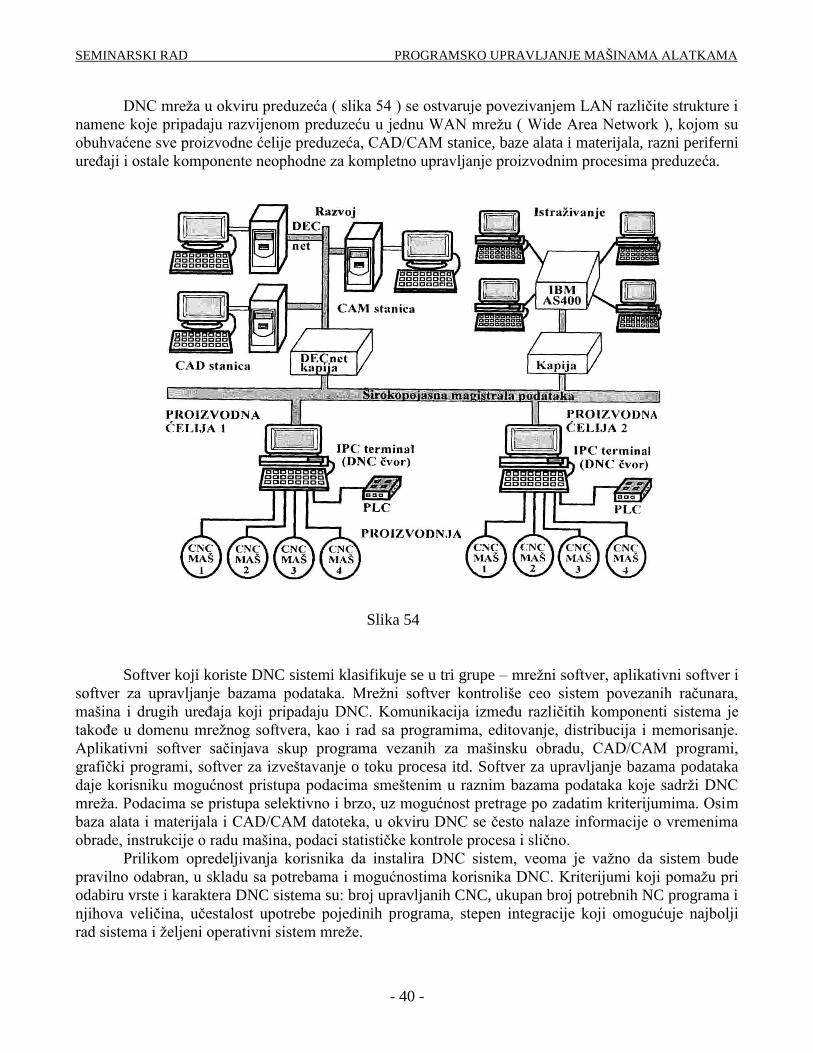
DNC mreţa u okviru preduzeća ( slika 54 ) se ostvaruje povezivanjem LAN različite strukture i
namene koje pripadaju razvijenom preduzeću u jednu WAN mreţu ( Wide Area Network ), kojom su
obuhvaćene sve proizvodne ćelije preduzeća, CAD/CAM stanice, baze alata i materijala, razni periferni
ureĎaji i ostale komponente neophodne za kompletno upravljanje proizvodnim procesima preduzeća.
Slika 54
Softver koji koriste DNC sistemi klasifikuje se u tri grupe – mreţni softver, aplikativni softver i
softver za upravljanje bazama podataka. Mreţni softver kontroliše ceo sistem povezanih računara,
mašina i drugih ureĎaja koji pripadaju DNC. Komunikacija izmeĎu različitih komponenti sistema je
takoĎe u domenu mreţnog softvera, kao i rad sa programima, editovanje, distribucija i memorisanje.
Aplikativni softver sačinjava skup programa vezanih za mašinsku obradu, CAD/CAM programi,
grafički programi, softver za izveštavanje o toku procesa itd. Softver za upravljanje bazama podataka
daje korisniku mogućnost pristupa podacima smeštenim u raznim bazama podataka koje sadrţi DNC
mreţa. Podacima se pristupa selektivno i brzo, uz mogućnost pretrage po zadatim kriterijumima. Osim
baza alata i materijala i CAD/CAM datoteka, u okviru DNC se često nalaze informacije o vremenima
obrade, instrukcije o radu mašina, podaci statističke kontrole procesa i slično.
Prilikom opredeljivanja korisnika da instalira DNC sistem, veoma je vaţno da sistem bude
pravilno odabran, u skladu sa potrebama i mogućnostima korisnika DNC. Kriterijumi koji pomaţu pri
odabiru vrste i karaktera DNC sistema su: broj upravljanih CNC, ukupan broj potrebnih NC programa i
njihova veličina, učestalost upotrebe pojedinih programa, stepen integracije koji omogućuje najbolji
rad sistema i ţeljeni operativni sistem mreţe.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 41 -
VI ELEMENTI TEHNIKE NUMERIĈKOG UPRAVLJANJA
Tehnički elementi koji čine osnovnu stukturu NC sistema su, kao što je već ranije pomenuto –
upravljačka jedinica, pogonski sistem, merni sistem i upravljana mašina alatka.
GraĎa upravljačkih jedinica i način njihovog funkcionisanja su razmatrani u prethodnim
poglavljima. Funkcije koje UJ ostvaruju u sistemu su sledeće: startovanje i prekid rada mašine,
uključivanje/isključivanje rashladnog sredstva, pozicioniranje radnog stola, zamena alata izmeĎu
odreĎenih operacija obrade, puštanje glavnog vretena u rad i blagovremeno zaustavljanje,
pozicioniranje alata po osama pri zadatom pomoćnom kretanju, kretanje alata po konturi obradka itd.
Standardni moduli u okviru UJ su: upravljački modul, memorijski i komunikacijski modul, modul za
interpolaciju, modul za ulaz/izlaz podataka i modul za podršku ekrana. Osim ovih, mnoge UJ sadrţe
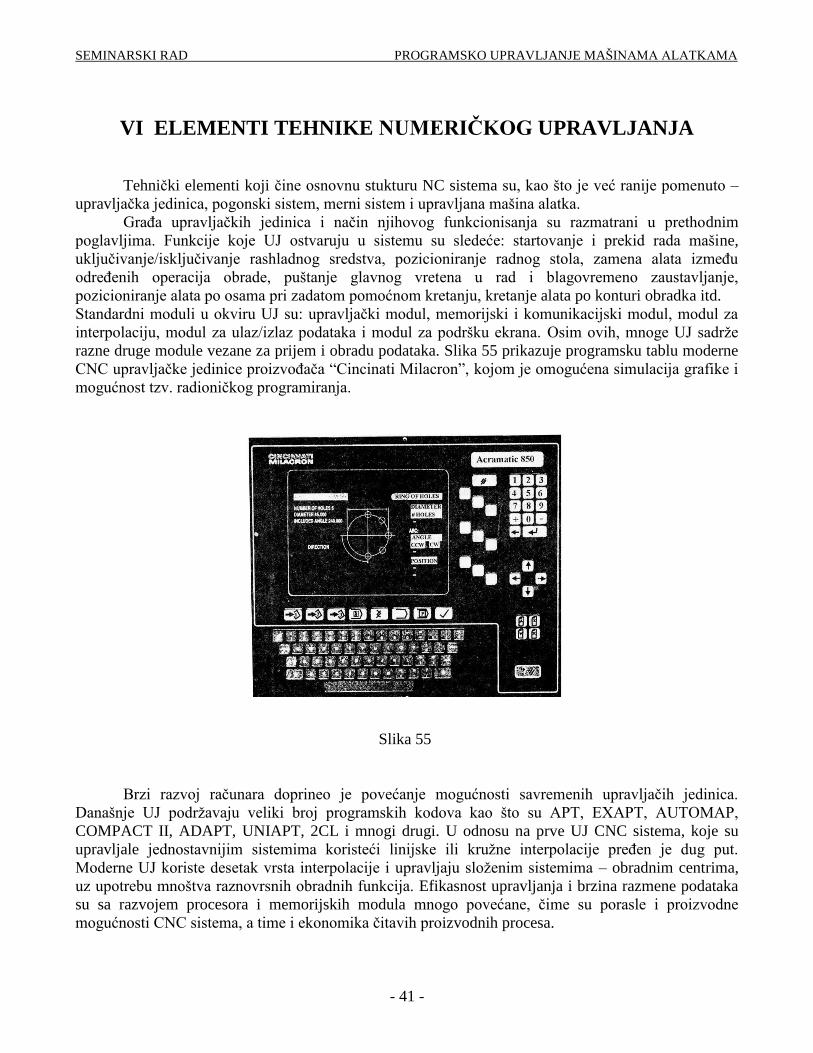
razne druge module vezane za prijem i obradu podataka. Slika 55 prikazuje programsku tablu moderne
CNC upravljačke jedinice proizvoĎača “Cincinati Milacron”, kojom je omogućena simulacija grafike i
mogućnost tzv. radioničkog programiranja.
Slika 55
Brzi razvoj računara doprineo je povećanje mogućnosti savremenih upravljačih jedinica.
Današnje UJ podrţavaju veliki broj programskih kodova kao što su APT, EXAPT, AUTOMAP,
COMPACT II, ADAPT, UNIAPT, 2CL i mnogi drugi. U odnosu na prve UJ CNC sistema, koje su
upravljale jednostavnijim sistemima koristeći linijske ili kruţne interpolacije preĎen je dug put.
Moderne UJ koriste desetak vrsta interpolacije i upravljaju sloţenim sistemima – obradnim centrima,
uz upotrebu mnoštva raznovrsnih obradnih funkcija. Efikasnost upravljanja i brzina razmene podataka
su sa razvojem procesora i memorijskih modula mnogo povećane, čime su porasle i proizvodne
mogućnosti CNC sistema, a time i ekonomika čitavih proizvodnih procesa.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 42 -
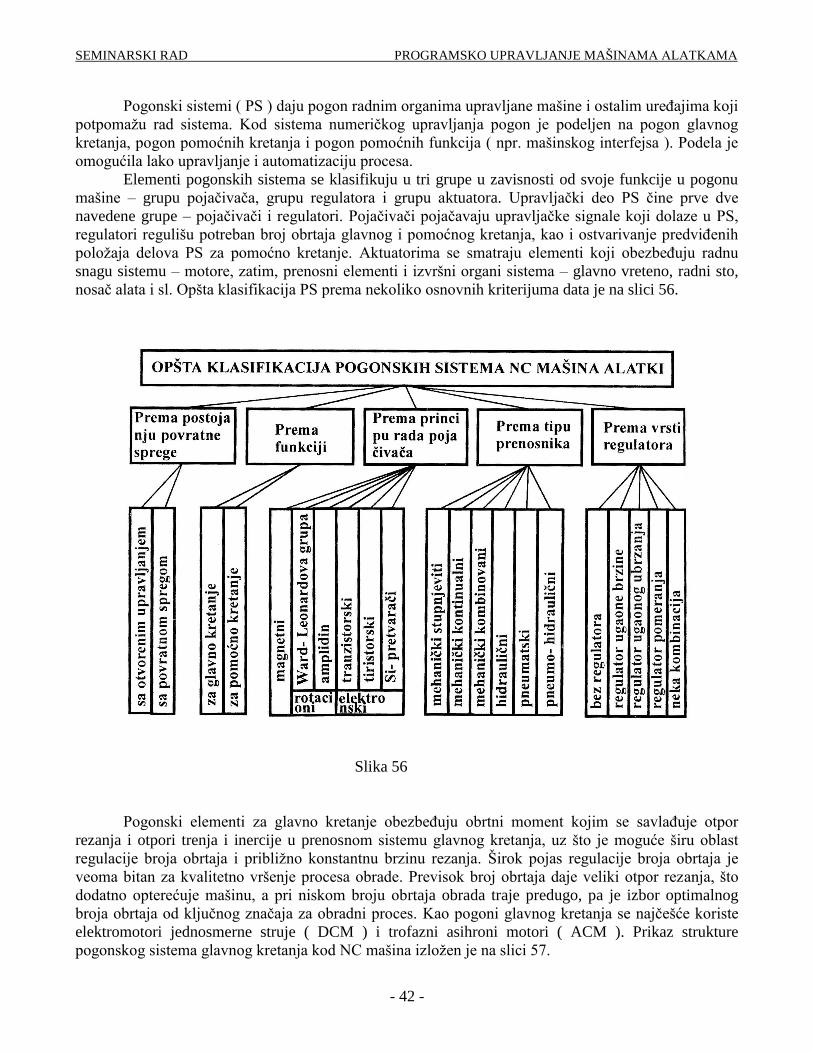
Pogonski sistemi ( PS ) daju pogon radnim organima upravljane mašine i ostalim ureĎajima koji
potpomaţu rad sistema. Kod sistema numeričkog upravljanja pogon je podeljen na pogon glavnog
kretanja, pogon pomoćnih kretanja i pogon pomoćnih funkcija ( npr. mašinskog interfejsa ). Podela je
omogućila lako upravljanje i automatizaciju procesa.
Elementi pogonskih sistema se klasifikuju u tri grupe u zavisnosti od svoje funkcije u pogonu
mašine – grupu pojačivača, grupu regulatora i grupu aktuatora. Upravljački deo PS čine prve dve
navedene grupe – pojačivači i regulatori. Pojačivači pojačavaju upravljačke signale koji dolaze u PS,
regulatori regulišu potreban broj obrtaja glavnog i pomoćnog kretanja, kao i ostvarivanje predviĎenih
poloţaja delova PS za pomoćno kretanje. Aktuatorima se smatraju elementi koji obezbeĎuju radnu
snagu sistemu – motore, zatim, prenosni elementi i izvršni organi sistema – glavno vreteno, radni sto,
nosač alata i sl. Opšta klasifikacija PS prema nekoliko osnovnih kriterijuma data je na slici 56.
Slika 56
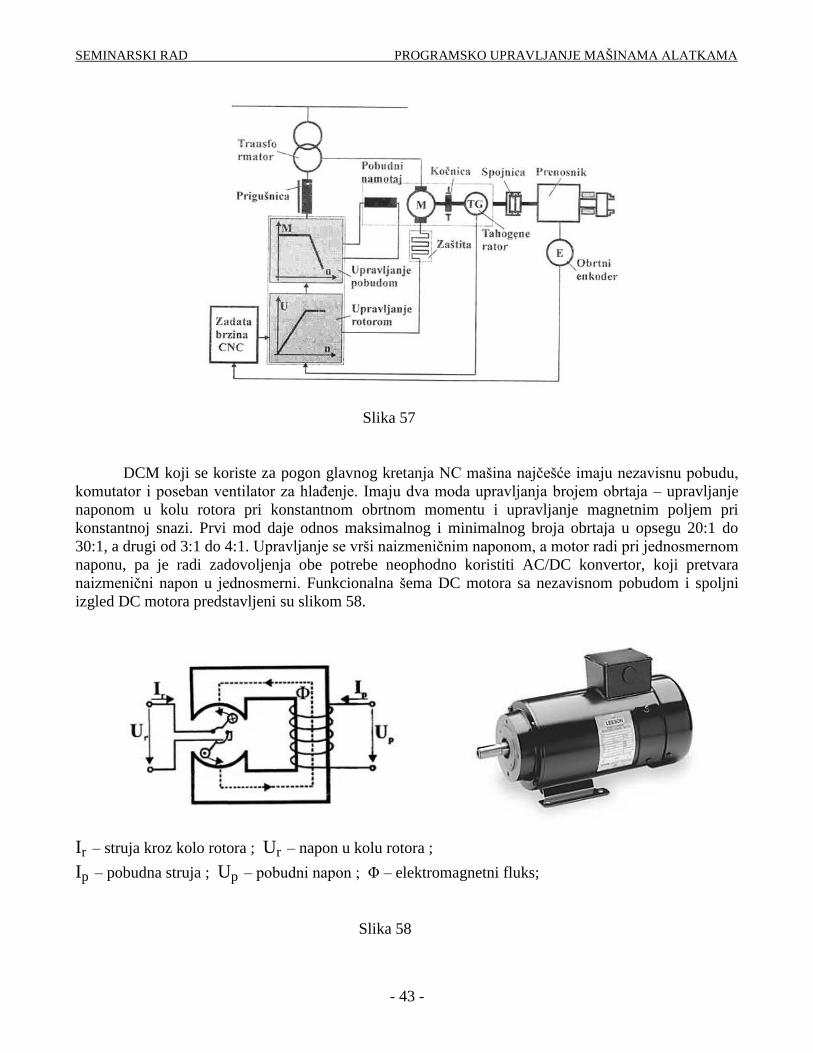
Pogonski elementi za glavno kretanje obezbeĎuju obrtni moment kojim se savlaĎuje otpor
rezanja i otpori trenja i inercije u prenosnom sistemu glavnog kretanja, uz što je moguće širu oblast
regulacije broja obrtaja i pribliţno konstantnu brzinu rezanja. Širok pojas regulacije broja obrtaja je
veoma bitan za kvalitetno vršenje procesa obrade. Previsok broj obrtaja daje veliki otpor rezanja, što
dodatno opterećuje mašinu, a pri niskom broju obrtaja obrada traje predugo, pa je izbor optimalnog
broja obrtaja od ključnog značaja za obradni proces. Kao pogoni glavnog kretanja se najčešće koriste
elektromotori jednosmerne struje ( DCM ) i trofazni asihroni motori ( ACM ). Prikaz strukture
pogonskog sistema glavnog kretanja kod NC mašina izloţen je na slici 57.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 43 -
Slika 57
DCM koji se koriste za pogon glavnog kretanja NC mašina najčešće imaju nezavisnu pobudu,
komutator i poseban ventilator za hlaĎenje. Imaju dva moda upravljanja brojem obrtaja – upravljanje
naponom u kolu rotora pri konstantnom obrtnom momentu i upravljanje magnetnim poljem pri
konstantnoj snazi. Prvi mod daje odnos maksimalnog i minimalnog broja obrtaja u opsegu 20:1 do
30:1, a drugi od 3:1 do 4:1. Upravljanje se vrši naizmeničnim naponom, a motor radi pri jednosmernom
naponu, pa je radi zadovoljenja obe potrebe neophodno koristiti AC/DC konvertor, koji pretvara
naizmenični napon u jednosmerni. Funkcionalna šema DC motora sa nezavisnom pobudom i spoljni
izgled DC motora predstavljeni su slikom 58.
Ir – struja kroz kolo rotora ; Ur – napon u kolu rotora ;
Ip – pobudna struja ; Up – pobudni napon ; Φ – elektromagnetni fluks;
Slika 58
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 44 -
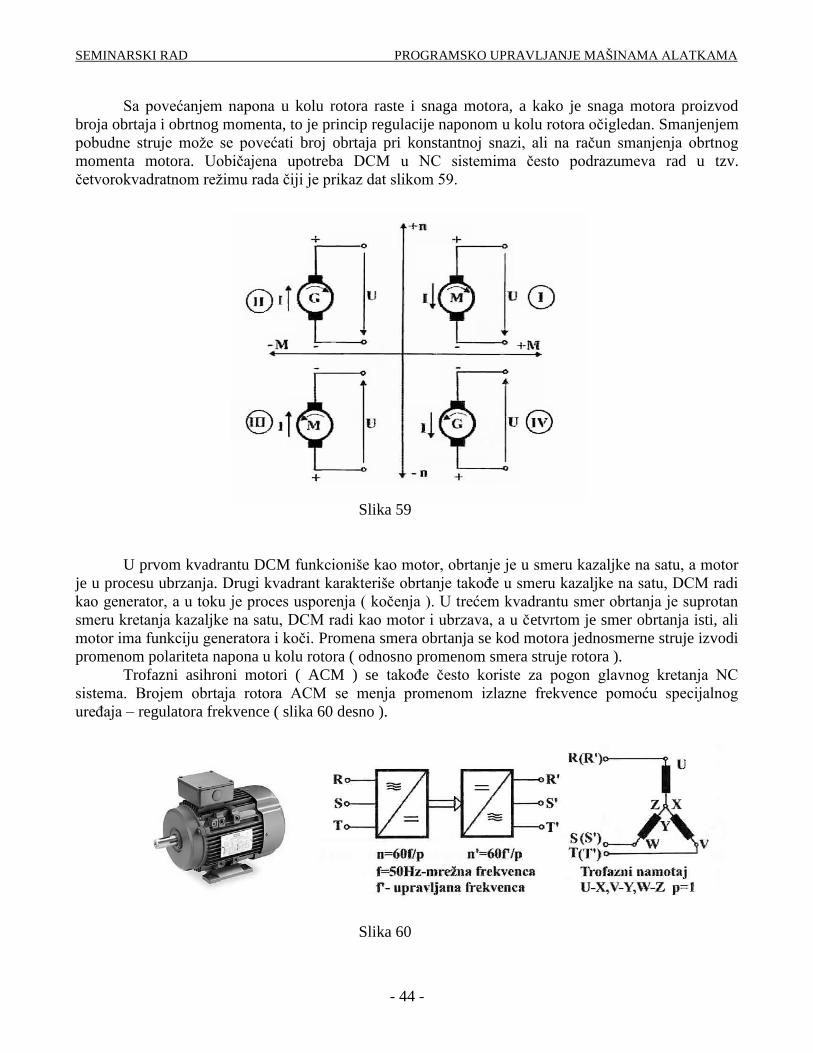
Sa povećanjem napona u kolu rotora raste i snaga motora, a kako je snaga motora proizvod
broja obrtaja i obrtnog momenta, to je princip regulacije naponom u kolu rotora očigledan. Smanjenjem
pobudne struje moţe se povećati broj obrtaja pri konstantnoj snazi, ali na račun smanjenja obrtnog
momenta motora. Uobičajena upotreba DCM u NC sistemima često podrazumeva rad u tzv.
četvorokvadratnom reţimu rada čiji je prikaz dat slikom 59.
Slika 59
U prvom kvadrantu DCM funkcioniše kao motor, obrtanje je u smeru kazaljke na satu, a motor
je u procesu ubrzanja. Drugi kvadrant karakteriše obrtanje takoĎe u smeru kazaljke na satu, DCM radi
kao generator, a u toku je proces usporenja ( kočenja ). U trećem kvadrantu smer obrtanja je suprotan
smeru kretanja kazaljke na satu, DCM radi kao motor i ubrzava, a u četvrtom je smer obrtanja isti, ali
motor ima funkciju generatora i koči. Promena smera obrtanja se kod motora jednosmerne struje izvodi
promenom polariteta napona u kolu rotora ( odnosno promenom smera struje rotora ).
Trofazni asihroni motori ( ACM ) se takoĎe često koriste za pogon glavnog kretanja NC
sistema. Brojem obrtaja rotora ACM se menja promenom izlazne frekvence pomoću specijalnog
ureĎaja – regulatora frekvence ( slika 60 desno ).
Slika 60
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 45 -
Promenom izlazne frekvence moţe da se utiče na električne osobine statora ili na električne
osobine rotora, čime je omogućeno upravljanje motorom. Trofazni ACM su izdrţljivi u radu i dobro
podnose privremeno preopterećenje. Odlikuju se širokim pojasom regulacije broja obrtaja, malim
momentom inercije, visokom pouzdanošću, a posebno se ističu izrazito stabilnim radom pri niskim
brojevima obrtaja. Spoljni izgled ACM je prikazan u levom delu slike 60.
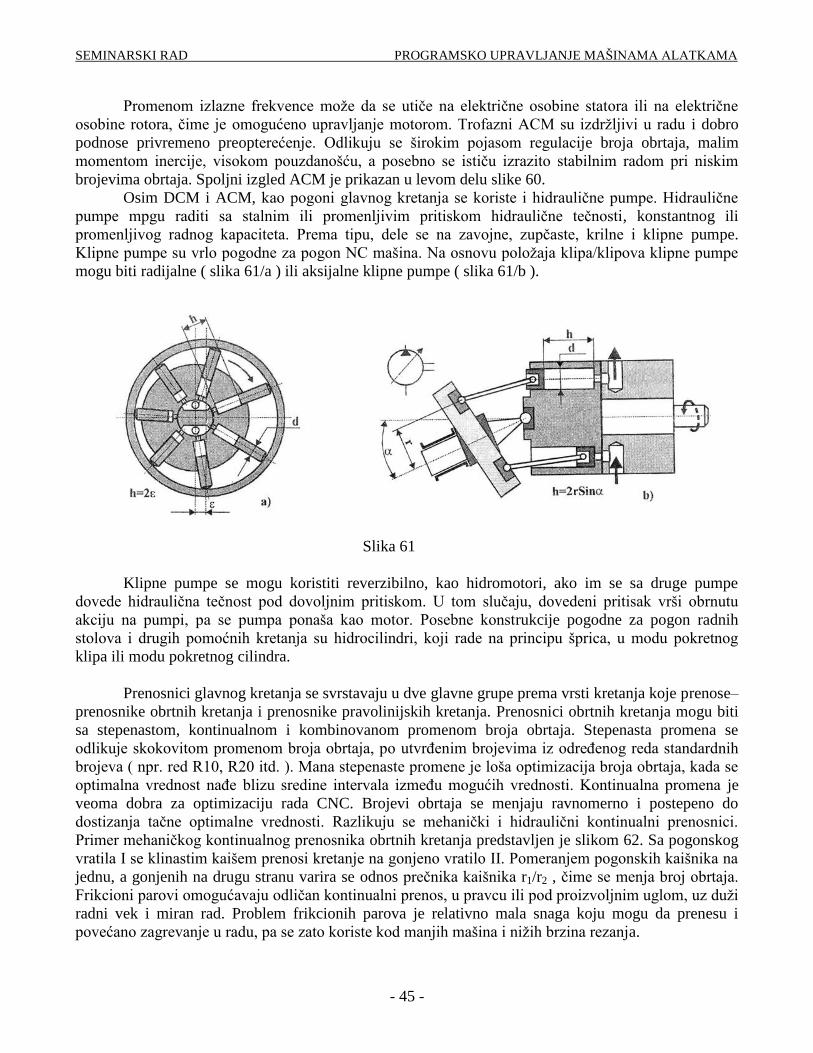
Osim DCM i ACM, kao pogoni glavnog kretanja se koriste i hidraulične pumpe. Hidraulične
pumpe mpgu raditi sa stalnim ili promenljivim pritiskom hidraulične tečnosti, konstantnog ili
promenljivog radnog kapaciteta. Prema tipu, dele se na zavojne, zupčaste, krilne i klipne pumpe.
Klipne pumpe su vrlo pogodne za pogon NC mašina. Na osnovu poloţaja klipa/klipova klipne pumpe
mogu biti radijalne ( slika 61/a ) ili aksijalne klipne pumpe ( slika 61/b ).
Slika 61
Klipne pumpe se mogu koristiti reverzibilno, kao hidromotori, ako im se sa druge pumpe
dovede hidraulična tečnost pod dovoljnim pritiskom. U tom slučaju, dovedeni pritisak vrši obrnutu
akciju na pumpi, pa se pumpa ponaša kao motor. Posebne konstrukcije pogodne za pogon radnih
stolova i drugih pomoćnih kretanja su hidrocilindri, koji rade na principu šprica, u modu pokretnog
klipa ili modu pokretnog cilindra.
Prenosnici glavnog kretanja se svrstavaju u dve glavne grupe prema vrsti kretanja koje prenose–
prenosnike obrtnih kretanja i prenosnike pravolinijskih kretanja. Prenosnici obrtnih kretanja mogu biti
sa stepenastom, kontinualnom i kombinovanom promenom broja obrtaja. Stepenasta promena se
odlikuje skokovitom promenom broja obrtaja, po utvrĎenim brojevima iz odreĎenog reda standardnih
brojeva ( npr. red R10, R20 itd. ). Mana stepenaste promene je loša optimizacija broja obrtaja, kada se
optimalna vrednost naĎe blizu sredine intervala izmeĎu mogućih vrednosti. Kontinualna promena je
veoma dobra za optimizaciju rada CNC. Brojevi obrtaja se menjaju ravnomerno i postepeno do
dostizanja tačne optimalne vrednosti. Razlikuju se mehanički i hidraulični kontinualni prenosnici.
Primer mehaničkog kontinualnog prenosnika obrtnih kretanja predstavljen je slikom 62. Sa pogonskog
vratila I se klinastim kaišem prenosi kretanje na gonjeno vratilo II. Pomeranjem pogonskih kaišnika na
jednu, a gonjenih na drugu stranu varira se odnos prečnika kaišnika r1/r2 , čime se menja broj obrtaja.
Frikcioni parovi omogućavaju odličan kontinualni prenos, u pravcu ili pod proizvoljnim uglom, uz duţi
radni vek i miran rad. Problem frikcionih parova je relativno mala snaga koju mogu da prenesu i
povećano zagrevanje u radu, pa se zato koriste kod manjih mašina i niţih brzina rezanja.
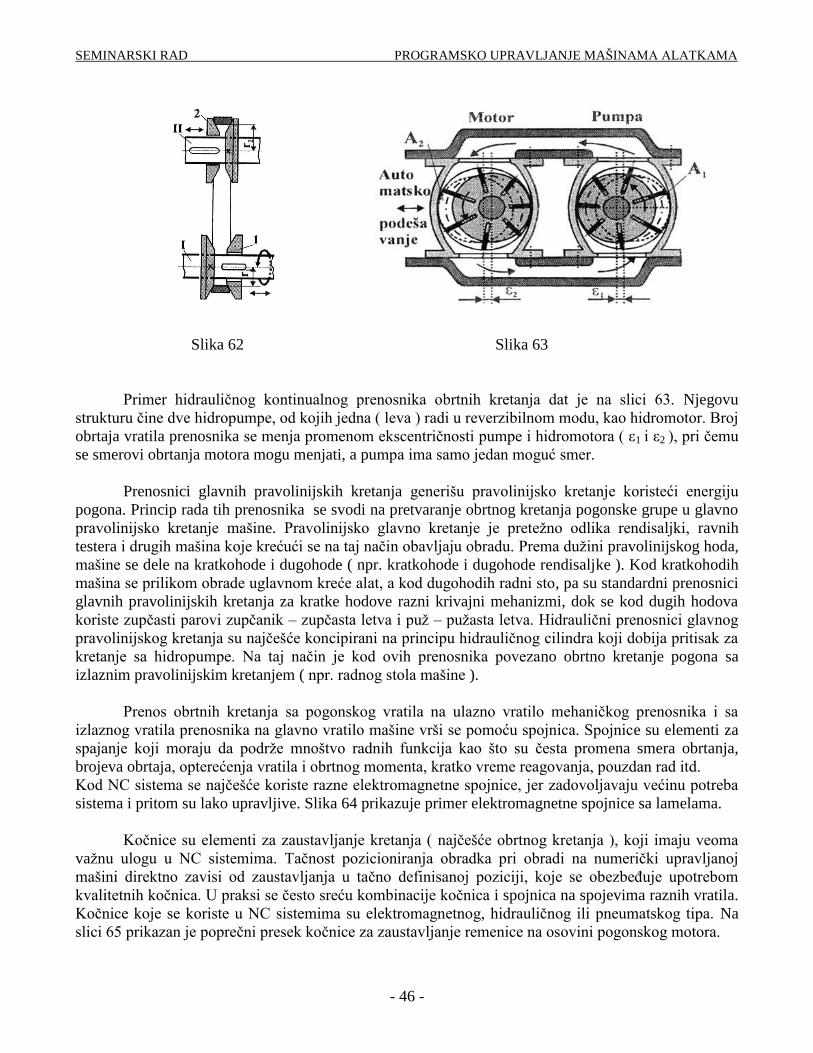
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 46 -
Slika 62 Slika 63
Primer hidrauličnog kontinualnog prenosnika obrtnih kretanja dat je na slici 63. Njegovu
strukturu čine dve hidropumpe, od kojih jedna ( leva ) radi u reverzibilnom modu, kao hidromotor. Broj
obrtaja vratila prenosnika se menja promenom ekscentričnosti pumpe i hidromotora ( ε1 i ε2 ), pri čemu
se smerovi obrtanja motora mogu menjati, a pumpa ima samo jedan moguć smer.
Prenosnici glavnih pravolinijskih kretanja generišu pravolinijsko kretanje koristeći energiju
pogona. Princip rada tih prenosnika se svodi na pretvaranje obrtnog kretanja pogonske grupe u glavno
pravolinijsko kretanje mašine. Pravolinijsko glavno kretanje je preteţno odlika rendisaljki, ravnih
testera i drugih mašina koje krećući se na taj način obavljaju obradu. Prema duţini pravolinijskog hoda,
mašine se dele na kratkohode i dugohode ( npr. kratkohode i dugohode rendisaljke ). Kod kratkohodih
mašina se prilikom obrade uglavnom kreće alat, a kod dugohodih radni sto, pa su standardni prenosnici
glavnih pravolinijskih kretanja za kratke hodove razni krivajni mehanizmi, dok se kod dugih hodova
koriste zupčasti parovi zupčanik – zupčasta letva i puţ – puţasta letva. Hidraulični prenosnici glavnog
pravolinijskog kretanja su najčešće koncipirani na principu hidrauličnog cilindra koji dobija pritisak za
kretanje sa hidropumpe. Na taj način je kod ovih prenosnika povezano obrtno kretanje pogona sa
izlaznim pravolinijskim kretanjem ( npr. radnog stola mašine ).
Prenos obrtnih kretanja sa pogonskog vratila na ulazno vratilo mehaničkog prenosnika i sa
izlaznog vratila prenosnika na glavno vratilo mašine vrši se pomoću spojnica. Spojnice su elementi za
spajanje koji moraju da podrţe mnoštvo radnih funkcija kao što su česta promena smera obrtanja,
brojeva obrtaja, opterećenja vratila i obrtnog momenta, kratko vreme reagovanja, pouzdan rad itd.
Kod NC sistema se najčešće koriste razne elektromagnetne spojnice, jer zadovoljavaju većinu potreba
sistema i pritom su lako upravljive. Slika 64 prikazuje primer elektromagnetne spojnice sa lamelama.
Kočnice su elementi za zaustavljanje kretanja ( najčešće obrtnog kretanja ), koji imaju veoma
vaţnu ulogu u NC sistemima. Tačnost pozicioniranja obradka pri obradi na numerički upravljanoj
mašini direktno zavisi od zaustavljanja u tačno definisanoj poziciji, koje se obezbeĎuje upotrebom
kvalitetnih kočnica. U praksi se često sreću kombinacije kočnica i spojnica na spojevima raznih vratila.
Kočnice koje se koriste u NC sistemima su elektromagnetnog, hidrauličnog ili pneumatskog tipa. Na
slici 65 prikazan je poprečni presek kočnice za zaustavljanje remenice na osovini pogonskog motora.
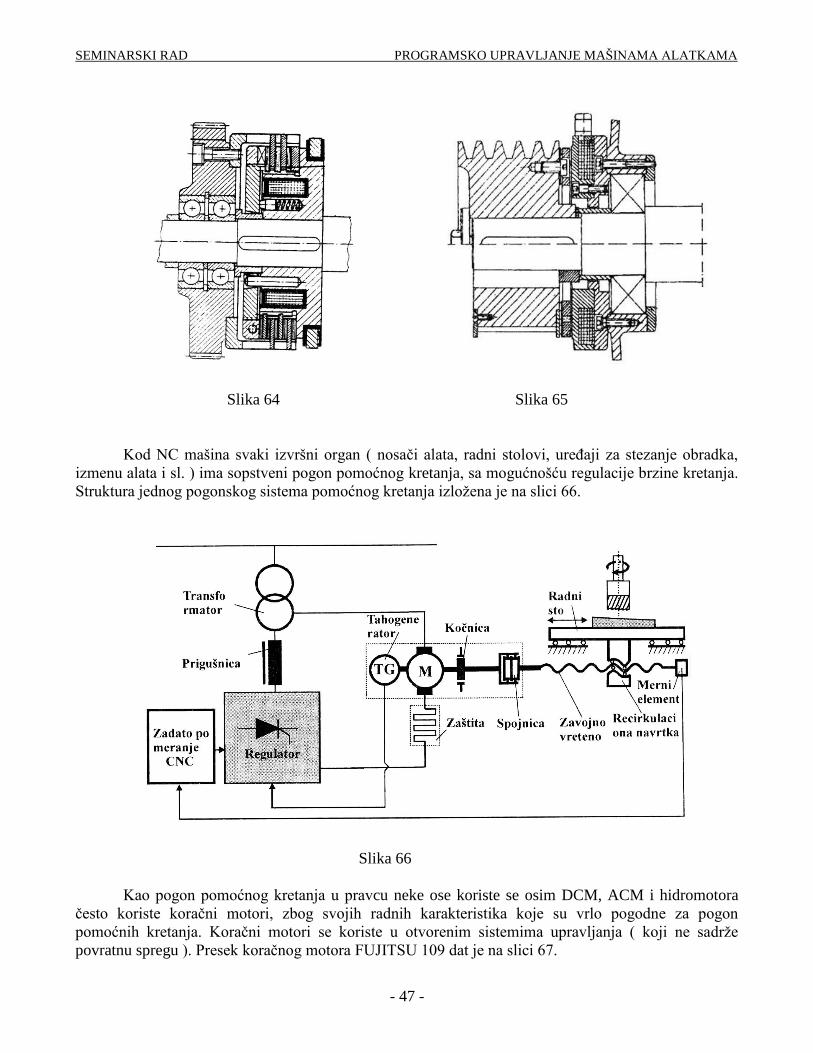
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 47 -
Slika 64 Slika 65
Kod NC mašina svaki izvršni organ ( nosači alata, radni stolovi, ureĎaji za stezanje obradka,
izmenu alata i sl. ) ima sopstveni pogon pomoćnog kretanja, sa mogućnošću regulacije brzine kretanja.
Struktura jednog pogonskog sistema pomoćnog kretanja izloţena je na slici 66.
Slika 66
Kao pogon pomoćnog kretanja u pravcu neke ose koriste se osim DCM, ACM i hidromotora
često koriste koračni motori, zbog svojih radnih karakteristika koje su vrlo pogodne za pogon
pomoćnih kretanja. Koračni motori se koriste u otvorenim sistemima upravljanja ( koji ne sadrţe
povratnu spregu ). Presek koračnog motora FUJITSU 109 dat je na slici 67.
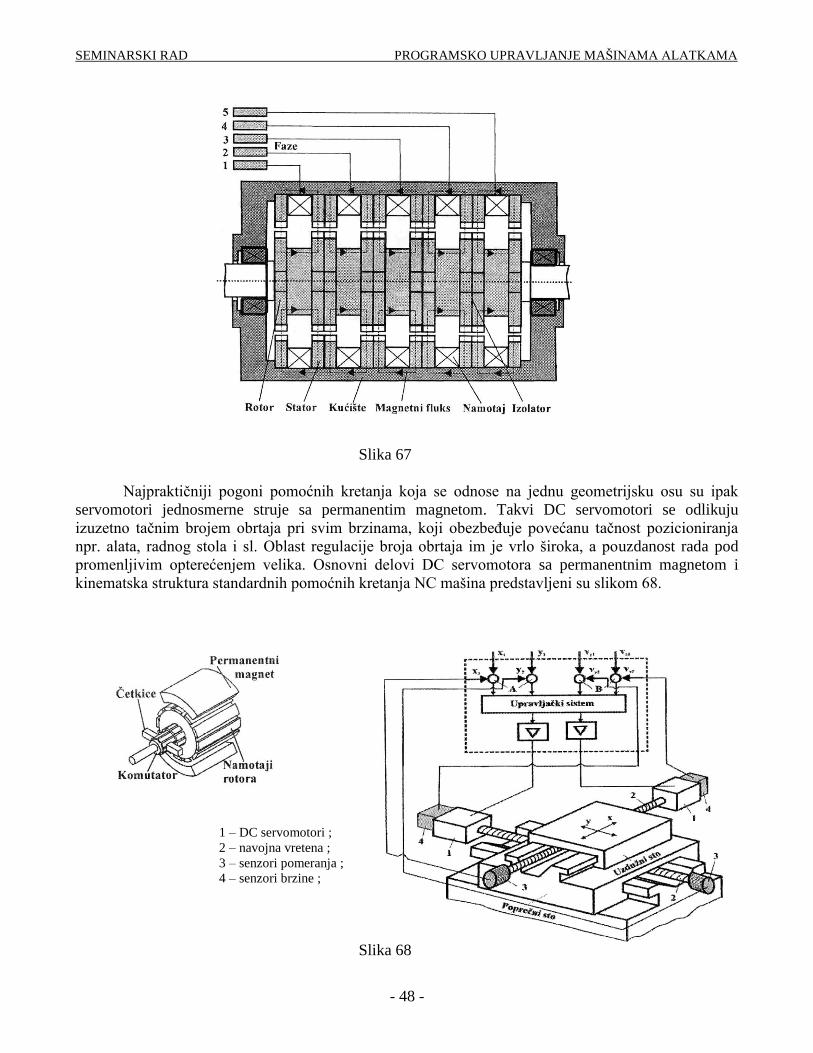
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 48 -
Slika 67
Najpraktičniji pogoni pomoćnih kretanja koja se odnose na jednu geometrijsku osu su ipak
servomotori jednosmerne struje sa permanentim magnetom. Takvi DC servomotori se odlikuju
izuzetno tačnim brojem obrtaja pri svim brzinama, koji obezbeĎuje povećanu tačnost pozicioniranja
npr. alata, radnog stola i sl. Oblast regulacije broja obrtaja im je vrlo široka, a pouzdanost rada pod
promenljivim opterećenjem velika. Osnovni delovi DC servomotora sa permanentnim magnetom i
kinematska struktura standardnih pomoćnih kretanja NC mašina predstavljeni su slikom 68.
1 – DC servomotori ;
2 – navojna vretena ;
3 – senzori pomeranja ;
4 – senzori brzine ;
Slika 68
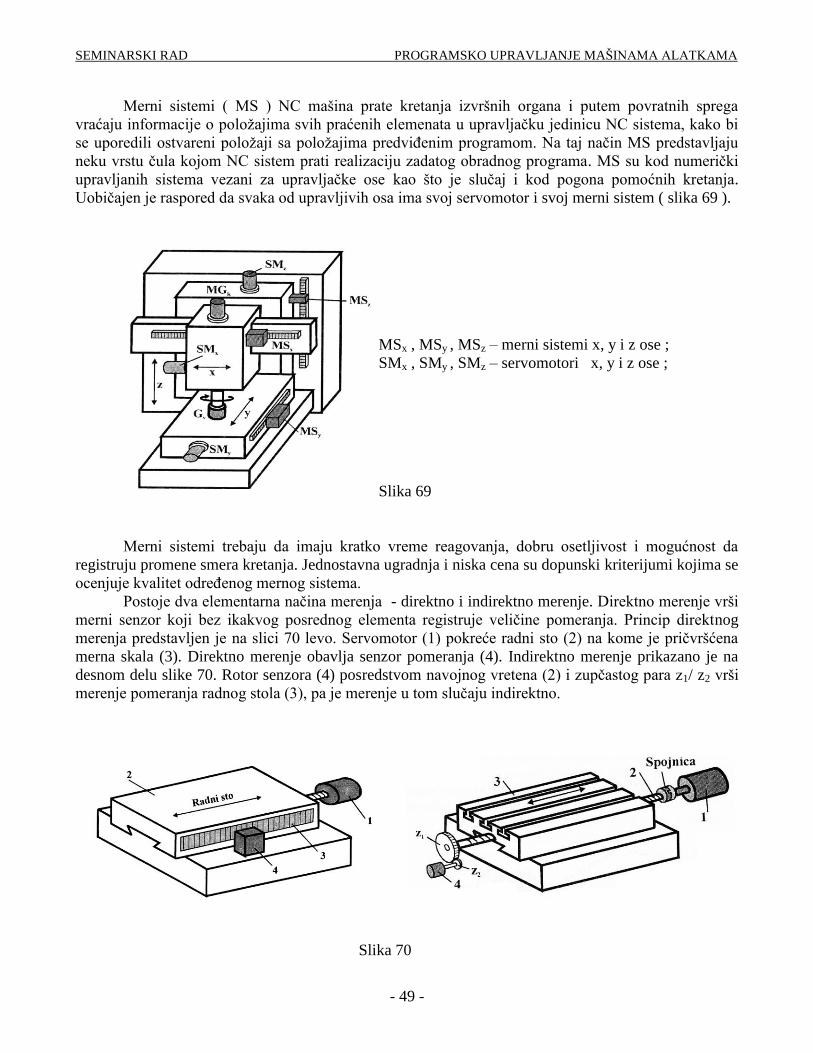
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 49 -
Merni sistemi ( MS ) NC mašina prate kretanja izvršnih organa i putem povratnih sprega
vraćaju informacije o poloţajima svih praćenih elemenata u upravljačku jedinicu NC sistema, kako bi
se uporedili ostvareni poloţaji sa poloţajima predviĎenim programom. Na taj način MS predstavljaju
neku vrstu čula kojom NC sistem prati realizaciju zadatog obradnog programa. MS su kod numerički
upravljanih sistema vezani za upravljačke ose kao što je slučaj i kod pogona pomoćnih kretanja.
Uobičajen je raspored da svaka od upravljivih osa ima svoj servomotor i svoj merni sistem ( slika 69 ).
MSx , MSy , MSz – merni sistemi x, y i z ose ;
SMx , SMy , SMz – servomotori x, y i z ose ;
Slika 69
Merni sistemi trebaju da imaju kratko vreme reagovanja, dobru osetljivost i mogućnost da
registruju promene smera kretanja. Jednostavna ugradnja i niska cena su dopunski kriterijumi kojima se
ocenjuje kvalitet odreĎenog mernog sistema.
Postoje dva elementarna načina merenja - direktno i indirektno merenje. Direktno merenje vrši
merni senzor koji bez ikakvog posrednog elementa registruje veličine pomeranja. Princip direktnog
merenja predstavljen je na slici 70 levo. Servomotor (1) pokreće radni sto (2) na kome je pričvršćena
merna skala (3). Direktno merenje obavlja senzor pomeranja (4). Indirektno merenje prikazano je na
desnom delu slike 70. Rotor senzora (4) posredstvom navojnog vretena (2) i zupčastog para z1/ z2 vrši
merenje pomeranja radnog stola (3), pa je merenje u tom slučaju indirektno.
Slika 70
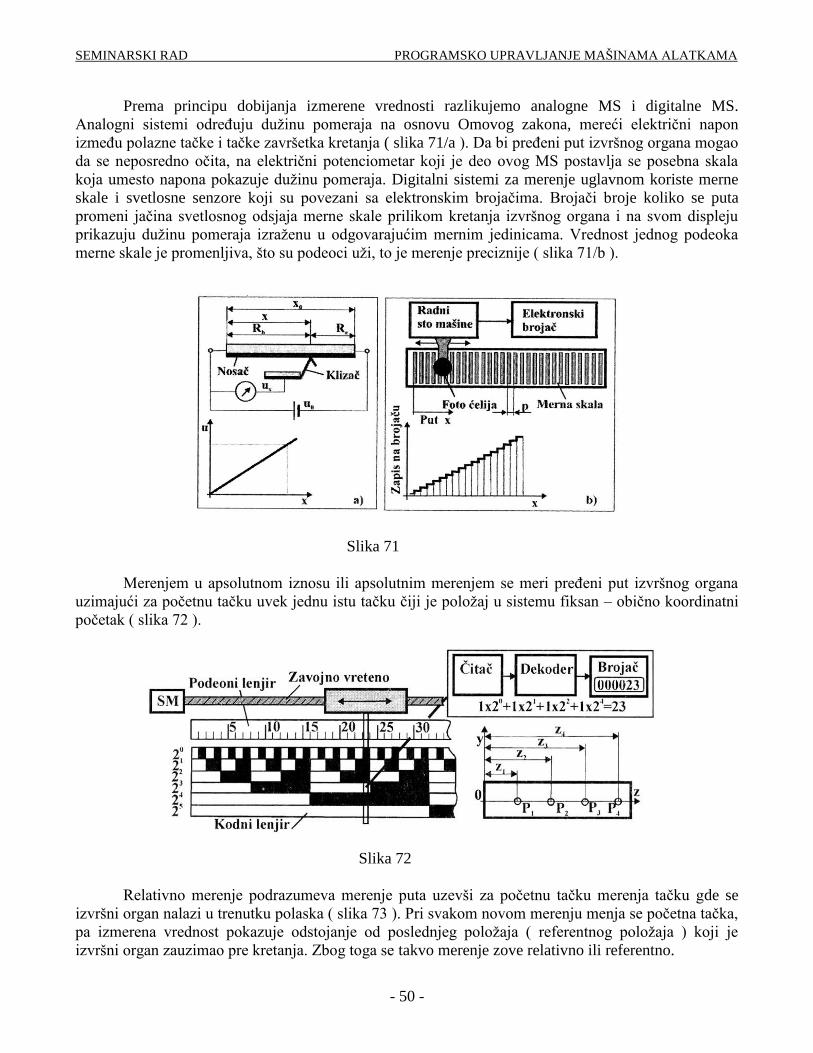
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 50 -
Prema principu dobijanja izmerene vrednosti razlikujemo analogne MS i digitalne MS.
Analogni sistemi odreĎuju duţinu pomeraja na osnovu Omovog zakona, mereći električni napon
izmeĎu polazne tačke i tačke završetka kretanja ( slika 71/a ). Da bi preĎeni put izvršnog organa mogao
da se neposredno očita, na električni potenciometar koji je deo ovog MS postavlja se posebna skala
koja umesto napona pokazuje duţinu pomeraja. Digitalni sistemi za merenje uglavnom koriste merne
skale i svetlosne senzore koji su povezani sa elektronskim brojačima. Brojači broje koliko se puta
promeni jačina svetlosnog odsjaja merne skale prilikom kretanja izvršnog organa i na svom displeju
prikazuju duţinu pomeraja izraţenu u odgovarajućim mernim jedinicama. Vrednost jednog podeoka
merne skale je promenljiva, što su podeoci uţi, to je merenje preciznije ( slika 71/b ).
Slika 71
Merenjem u apsolutnom iznosu ili apsolutnim merenjem se meri preĎeni put izvršnog organa
uzimajući za početnu tačku uvek jednu istu tačku čiji je poloţaj u sistemu fiksan – obično koordinatni
početak ( slika 72 ).
Slika 72
Relativno merenje podrazumeva merenje puta uzevši za početnu tačku merenja tačku gde se
izvršni organ nalazi u trenutku polaska ( slika 73 ). Pri svakom novom merenju menja se početna tačka,
pa izmerena vrednost pokazuje odstojanje od poslednjeg poloţaja ( referentnog poloţaja ) koji je
izvršni organ zauzimao pre kretanja. Zbog toga se takvo merenje zove relativno ili referentno.
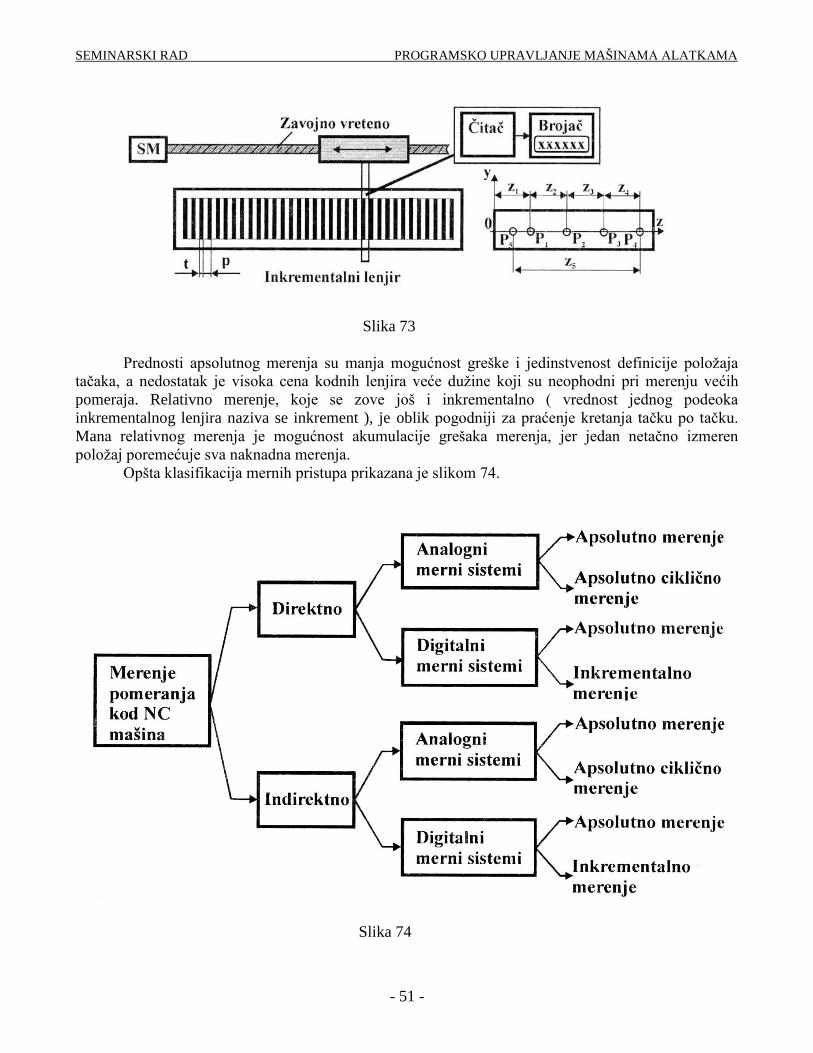
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 51 -
Slika 73
Prednosti apsolutnog merenja su manja mogućnost greške i jedinstvenost definicije poloţaja
tačaka, a nedostatak je visoka cena kodnih lenjira veće duţine koji su neophodni pri merenju većih
pomeraja. Relativno merenje, koje se zove još i inkrementalno ( vrednost jednog podeoka
inkrementalnog lenjira naziva se inkrement ), je oblik pogodniji za praćenje kretanja tačku po tačku.
Mana relativnog merenja je mogućnost akumulacije grešaka merenja, jer jedan netačno izmeren
poloţaj poremećuje sva naknadna merenja.
Opšta klasifikacija mernih pristupa prikazana je slikom 74.
Slika 74
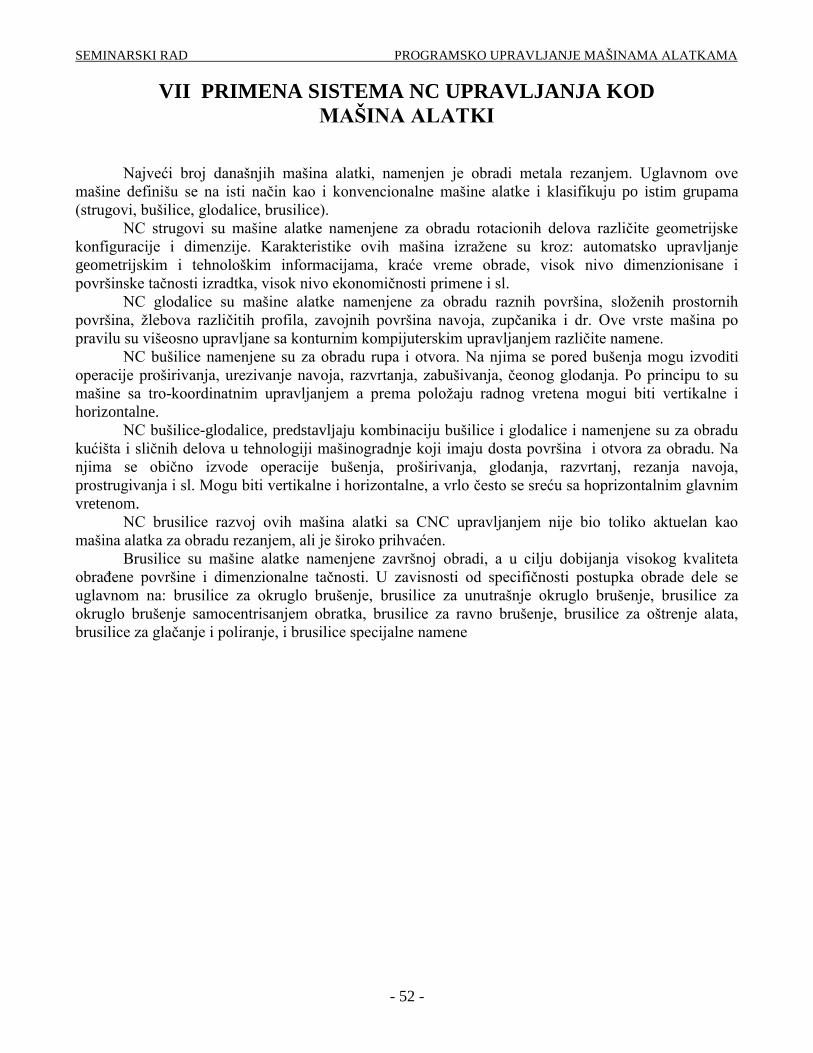
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 52 -
VII PRIMENA SISTEMA NC UPRAVLJANJA KOD
MAŠINA ALATKI
Najveći broj današnjih mašina alatki, namenjen je obradi metala rezanjem. Uglavnom ove
mašine definišu se na isti način kao i konvencionalne mašine alatke i klasifikuju po istim grupama
(strugovi, bušilice, glodalice, brusilice).
NC strugovi su mašine alatke namenjene za obradu rotacionih delova različite geometrijske
konfiguracije i dimenzije. Karakteristike ovih mašina izraţene su kroz: automatsko upravljanje
geometrijskim i tehnološkim informacijama, kraće vreme obrade, visok nivo dimenzionisane i
površinske tačnosti izradtka, visok nivo ekonomičnosti primene i sl.
NC glodalice su mašine alatke namenjene za obradu raznih površina, sloţenih prostornih
površina, ţlebova različitih profila, zavojnih površina navoja, zupčanika i dr. Ove vrste mašina po
pravilu su višeosno upravljane sa konturnim kompijuterskim upravljanjem različite namene.
NC bušilice namenjene su za obradu rupa i otvora. Na njima se pored bušenja mogu izvoditi
operacije proširivanja, urezivanje navoja, razvrtanja, zabušivanja, čeonog glodanja. Po principu to su
mašine sa tro-koordinatnim upravljanjem a prema poloţaju radnog vretena mogui biti vertikalne i
horizontalne.
NC bušilice-glodalice, predstavljaju kombinaciju bušilice i glodalice i namenjene su za obradu
kućišta i sličnih delova u tehnologiji mašinogradnje koji imaju dosta površina i otvora za obradu. Na
njima se obično izvode operacije bušenja, proširivanja, glodanja, razvrtanj, rezanja navoja,
prostrugivanja i sl. Mogu biti vertikalne i horizontalne, a vrlo često se sreću sa hoprizontalnim glavnim
vretenom.
NC brusilice razvoj ovih mašina alatki sa CNC upravljanjem nije bio toliko aktuelan kao
mašina alatka za obradu rezanjem, ali je široko prihvaćen.
Brusilice su mašine alatke namenjene završnoj obradi, a u cilju dobijanja visokog kvaliteta
obraĎene površine i dimenzionalne tačnosti. U zavisnosti od specifičnosti postupka obrade dele se
uglavnom na: brusilice za okruglo brušenje, brusilice za unutrašnje okruglo brušenje, brusilice za
okruglo brušenje samocentrisanjem obratka, brusilice za ravno brušenje, brusilice za oštrenje alata,
brusilice za glačanje i poliranje, i brusilice specijalne namene
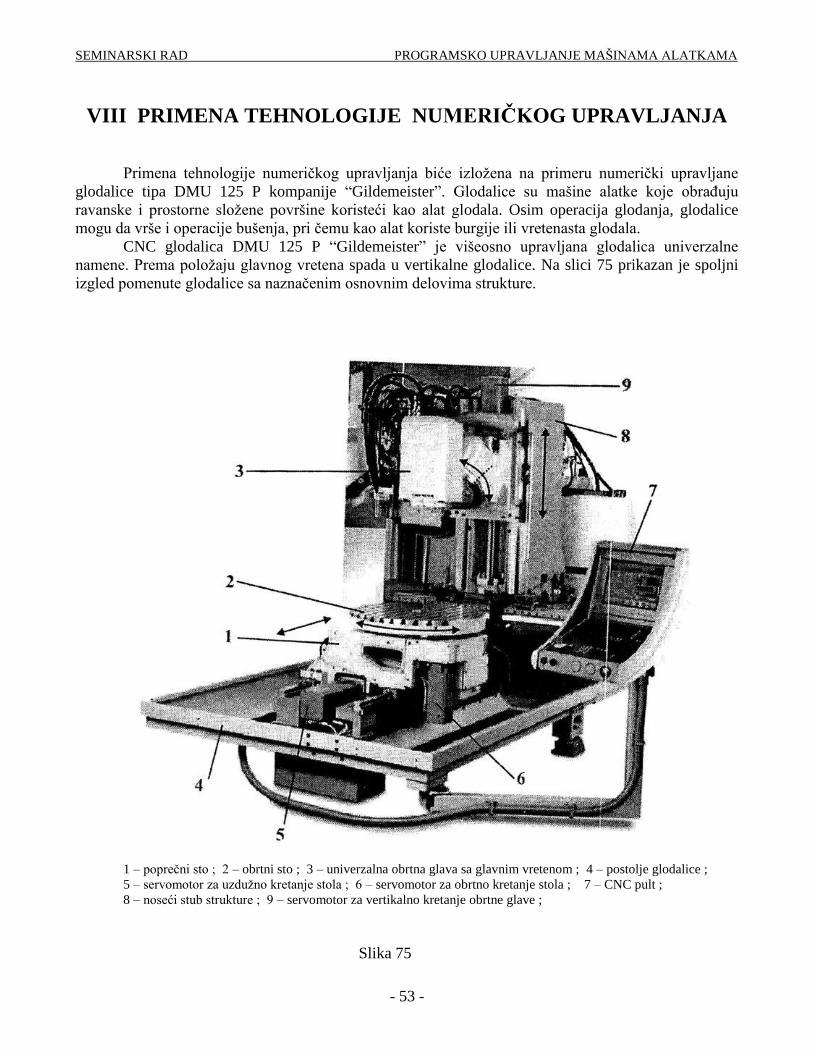
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 53 -
VIII PRIMENA TEHNOLOGIJE NUMERIĈKOG UPRAVLJANJA
Primena tehnologije numeričkog upravljanja biće izloţena na primeru numerički upravljane
glodalice tipa DMU 125 P kompanije “Gildemeister”. Glodalice su mašine alatke koje obraĎuju
ravanske i prostorne sloţene površine koristeći kao alat glodala. Osim operacija glodanja, glodalice
mogu da vrše i operacije bušenja, pri čemu kao alat koriste burgije ili vretenasta glodala.
CNC glodalica DMU 125 P “Gildemeister” je višeosno upravljana glodalica univerzalne
namene. Prema poloţaju glavnog vretena spada u vertikalne glodalice. Na slici 75 prikazan je spoljni
izgled pomenute glodalice sa naznačenim osnovnim delovima strukture.
1 – poprečni sto ; 2 – obrtni sto ; 3 – univerzalna obrtna glava sa glavnim vretenom ; 4 – postolje glodalice ;
5 – servomotor za uzduţno kretanje stola ; 6 – servomotor za obrtno kretanje stola ; 7 – CNC pult ;
8 – noseći stub strukture ; 9 – servomotor za vertikalno kretanje obrtne glave ;
Slika 75
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 54 -
Princip rada glodalice je sledeći: pripremak se steţe odgovarajućim steznim glavama ili
elektromagnetnim putem na obrtnom stolu (2). Obrtni sto omogućava zakretanje obradka tokom
obrade, radi pozicioniranja ili praćenja obradne konture. Kao što se sa slike moţe primetiti, glodalica
vrši obradu pomeranjem radnog stola kada alat zahvati materijal obradka. Servomotor (6) obezbeĎuje
pogon kretanja obrtnog stola. Poprečni sto (1) ima mogućnost dvosmernog pravolinijskog kretanja,
koje se pogoni pomoću servomotora (5). Pošto se obrtni sto nalazi na poprečnom stolu, kombinacija
njihovih kretanja pokriva sve tačke u domenu obrade ( zakretanjem obrtnog stola i pravolinijskim
pomeranjem bilo koja tačka obrtnog stola se moţe dovesti ispod vertikalne ose alata ). Alat se nosi u
univerzalnoj obrtnoj glavi (3), a pogon vertikalnog kretanja glave daje servomotor (9). Postolje mašine
(4) u kombinaciji sa stubom (8) fizički nosi sve ostale elemente mašine i obezbeĎuje miran i stabilan
rad. CNC pult (7) sadrţi tastaturu za unos podataka, set on/off funkcijskih prekidača, priključke za
spoljne memorije i displej kojim se prikazuju informacije o toku obrade, linije programskog koda,
grafički prikazi itd.
Kada se usvoji ţeljeni proizvod, definiše se program upravljanja koji se tastaturom ili spoljnom
memorijom unosi u memoriju kompjutera mašine. Program sadrţi podatke o kretanju alata – putanji i
brzini prilaţenja stolu, načinu postizanja radnih pozicija izvršnih organa mašine, brojevima obrtaja
glavnog vretena, brzini okretanja stola, broju prolaza itd. Program se testira puštanjem u rad na mašini
bez postavljanja alata. Zatim se vrše eventualne korekcije i snima proverena verzija programa. Na
mašinu se tada postavlja potreban alat, steţe pripremak i proverava se količina sredstva za hladjenje.
Uključenjem svih potrebnih prekidača i startovanjem programa počinje se kompjutersko numeričko
upravljanje procesom obrade na glodalici. Kompjuterski procesor obraĎuje podatke ulaznog
programskog koda i na osnovu toga inicira rad odreĎenih modula mašine. Noseći predviĎeni alat,
univerzalna obrtna glava prilazi pripremku koji se nalazi na obrtnom stolu u poziciji za tekuću
operaciju. Pri definisanom broju obrtaja glavnog vretena uključuje se dotok sredstva za hlaĎenje i alat
prodire u materijal pripremka do programirane dubine, a zatim se kombinacijom uzduţnog kretanja
poprečnog stola, obrtnog kretanja obrtnog stola i vertikalnog kretanja glave alat vodi po putanjama
propisanim programom upravljanja u čemu aktivno učestvuju merni sistemi mašine i upravljačka
jedinica. Kada alat preĎe definisanu putanju, obrtna glava se izdiţe van zahvata obradka, na
programsku kotu, smanjuje se ili isključuje dotok sredstva za hlaĎenje, a poprečni i obrtni sto dovode
obradak u sledeći obradni poloţaj. Tada počinje sledeći korak obrade, alat se zameni ( ili ostane isti ),
reguliše se optimalan broj obrtaja i kreće u glodanje naredne putanje. Proces se ponavlja do završetka
svih programiranih akcija i dobijanja završenog izradka. Ponavljanjem programa na novim
pripremcima se izraĎuje planirani broj komada proizvoda.
Zamenom programa upravljanja, uz primenu istih ili drugih alata brzo i jednostavno se prelazi
na drugačiji proizvodni artikal.
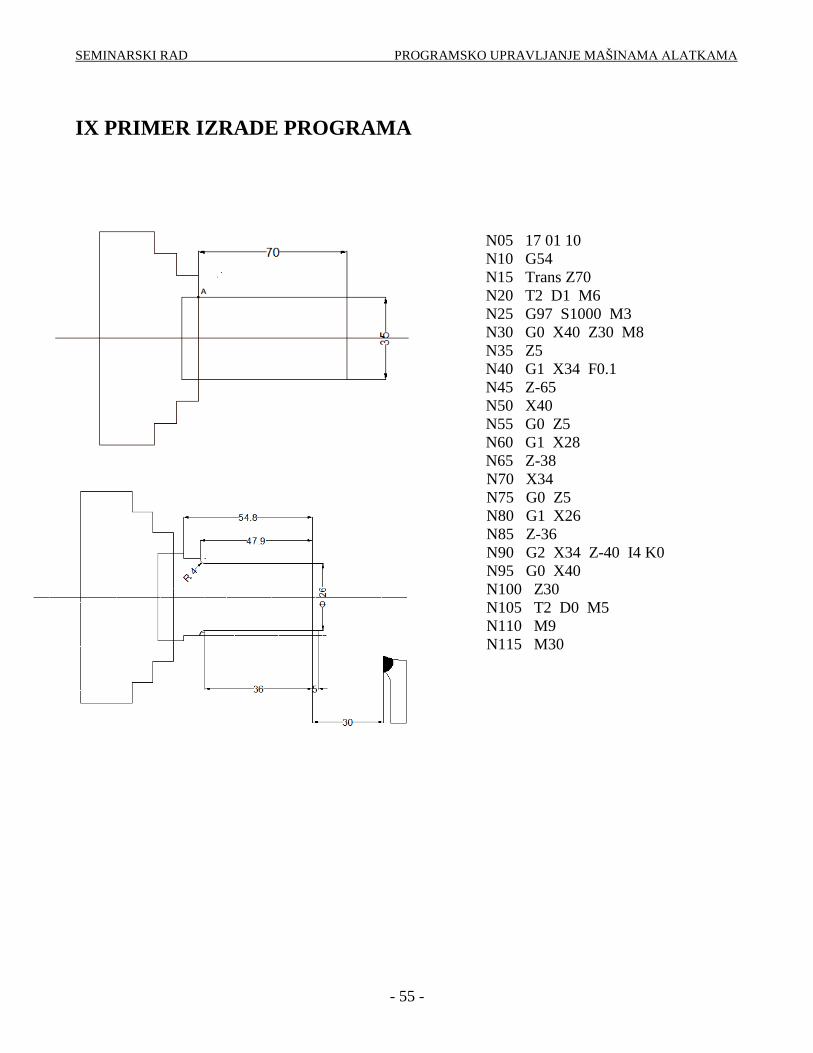
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 55 -
IX PRIMER IZRADE PROGRAMA
N05 17 01 10
N10 G54
N15 Trans Z70
N20 T2 D1 M6
N25 G97 S1000 M3
N30 G0 X40 Z30 M8
N35 Z5
N40 G1 X34 F0.1
N45 Z-65
N50 X40
N55 G0 Z5
N60 G1 X28
N65 Z-38
N70 X34
N75 G0 Z5
N80 G1 X26
N85 Z-36
N90 G2 X34 Z-40 I4 K0
N95 G0 X40
N100 Z30
N105 T2 D0 M5
N110 M9
N115 M30
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 56 -
X ZAKLJUĈAK
Programsko upravljanje mašinama alatkama je potpuno preokrenulo način proizvodnje i
podstaklo ubrzani razvoj ljudskog društva. Osim što je donelo olakšanje u smislu smanjenja fizičkog
ljudskog rada, omogućilo je proizvodnju velikog broja proizvoda sa minimalnim odstupanjima
dimenzija. Eliminacijom ljudskog faktora iz konkretnog voĎenja obradnih procesa, greške su se svele
na minimum, a ekonomičnost proizvodnje porasla.
Korak dalje ka automatizovanoj proizvodnji većih serija proizvoda donelo je numeričko
upravljanje i sistem bušenih medijuma za unos podataka. Jeftin medijum prenosa informacija i lakša
izmena proizvodnog programa podstiču dalji napredak programske proizvodnje.
Sa dolaskom CNC i DNC sistema, mogućnosti mašina alatki da izraĎuju proizvode sloţenije
geometrije naglo rastu. Postepenim razvojem CNC sistema nove metode interpolacije dodatno
obogaćuju mogućnosti mašina. Dolazi se do kontura koje je ručnim upravljanjem mašinom vrlo teško
ako ne i nemoguće izraditi. Softverska rešenja potiskuju hardverske komponente, a zamena programa
se svodi na učitavanje sledećeg programa u kompjuter, iz modernih spoljnih memorija. DNC sistemi su
se rasprostrli svetom kao epidemija, sve više preduzeća ih je uvodilo u svoju proizvodnju. Izuzetno
dobra komunikacija izmeĎu raznih proizvodnih sektora u preduzeću, ostvarena putem računarskih
mreţa i DNC je privlačila ogroman broj korisnika. CAD/CAM podrška i baze alata/materijala su
dovele DNC na još veći nivo, pa fabrike postaju pravi proizvodni giganti.
Svaka ozbiljna proizvodnja, u današnje vreme, počiva na upotrebi numerički upravljanih
mašina ili čak robota. Velike serije savršeno izraĎenih proizvoda, zadovoljenje mnoštva ljudskih
potreba i veliki rast opšteg društvenog proizvoda pokazuju koliki je značaj programskog upravljanja za
celokupno čovečanstvo.
SEMINARSKI RAD PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA
- 57 -
XI LITERATURA
Radomir V. Slavković - “PROGRAMSKO UPRAVLJANJE MAŠINAMA ALATKAMA”,
Tehnički fakultet, Čačak, 2004. godine
Miodrag Manić - beleške sa predavanja iz predmeta Tehnološki sistemi,
Mašinski fakultet, Niš, školska 2003/2004. godina
Luka Ljuboja – “Računari u sistemima upravljanja” ( skripta za učenike ),
Tehnička škola, Kikinda, 2005. godine
internet sajtovi: http://www. wikipedia.org/
http://www.coolmagnetman.com/magdcmot.htm
http://www.grainger.com/Grainger/wwg/start.shtml
http://www.gildemeister.com/
http://www.cnccncmachines.com/





























