Embed Size (px)
DESCRIPTION
electricidad general
Citation preview

I6
Depósito principal de agua
Q2Detector má-ximo depósito
I5 Detector mí-nimo depósito
Motor-bombaagua
Q1 ELVA. llenadodep. agua red
Detector mí-nimo tolva 1
Detector mí-nimo tolva 2
Tolva 1cemento
Tolva 2cemento
I8
Q3 Motor tolva 1
Q4 Motor tolva 2
Q5 Motor grava
Grava
0
I3 Pul. abre Elva.llenado depós.
I4 Pul. Cierra Elva.llenado depós.
I9 Sube programa
I10 Baja programa
PARADA DE
LLAVE
I1 Int. llavegeneral I2 Stop
General
I12 Borra programa
I11 Confirmaprograma OK
DEL
Programa 1
Programa en curso. Visualización HMI.
Detector caídade gravaI13
I7
Q6 Tolva 1sin cemento Q7 Tolva 2
sin cemento Q8 Depósitosin agua Q9 Relé térmico
activado
Gráfico 41.1.Aspecto general.
Aplicaciones industriales
GrupoActividad 41
255Control automatizado de una cantera de áridos para dos tolvas de cemento
au
lae
lec
tric
a.e
s

au
lae
lec
tric
a.e
sDescripción y requisitos mínimos
Una cantera de áridos adecuada para la preparación de hormigón a través decamiones hormigonera, tendrá los siguientes componentes:
Dos tolvas de cemento, con sensores de mínimo.
Un depósito de agua, del cual se cogerá siempre el elemento para la preparacióndel hormigón a través de un motor-bomba. A su vez, el depósito se llenará con aguade la red. Dispone de sensores de máximo y mínimo.
Una cinta transportadora será la encargada de hacer llegar la grava a la tolva dellenado de los camiones hormigonera. Un sensor determinará si el recipientealmacenador de grava, dispone de material suficiente.
El interruptor de llave (S1), será condicionante principal de funcionamiento.
El pulsador STOP general (S2), hará lo propio.
Un pulsador (S3) activará la electroválvula de llenado del depósito principal de agua(Y1); del mismo modo, otro pulsador (S4) detiene el proceso. Si el depósito está lleno,-detector de máximo (DTC2) activo-, la electroválvula se detiene de forma directa. Siestá vacío, -detector de mínimo (DTC1) activo- no permitirá la elaboración dehormigón, al mismo tiempo que avisará del hecho con la variable (H_DEPOS).
Para la preparación del hormigón se establecen diferentes programas: programa 1,programa 2, programa 3, etc. por ejemplo, el programa 1 implementa 2 minutos decemento de la tolva 1, tres minutos de agua y 5 minutos de grava.
Para el establecimiento de programas se usarán cuatro pulsadores; uno para subirprograma (S5), otro para bajar (S6), otro para efectuar la selección (S7) y otro paraborrar la selección (S8).
Si se agota el cemento de la tolva 1, -detector de mínimo tolva 1 (DTC3) activo-, secogerá automáticamente de la tolva 2 hasta terminar el programa. Si se activa undetector de mínimo, que no sea “mínimo tolva1”, el programa en curso se podráterminar, pero no se podrá iniciar un nuevo programa hasta que sea repuesto elmaterial causa de alarma.
Aunque un interruptor será llave general de funcionamiento, las alarmas sí podránser visualizadas aunque el interruptor general no esté activo.
Funcionamiento
Visualización y control del sistema
Objetivos de este montaje
Un sistema HMI SCADA, permitirá visualizar el programa en curso y lasinformaciones que se consideren oportunas.
Tanto el depósito de agua, como las dos tolvas de cemento, cuentan con sensorestipo sónar, con el propósito de saber en todo momento la altura de material existenteen el envase. El programa scada reflejará claramente el llenado con herramientasgráficas.
Realización de recetas, es decir, cada programa para elaboración de hormigón, seráuna receta, se crearán tantas, como programas se necesiten.
Gráfico 41.2. Representaciónde recetas de tiempo.
Aplicaciones industrialesControl automatizado de una cantera de áridos para dos tolvas de cemento256

au
lae
lec
tric
a.e
sVariables empleadas
Aplicaciones industriales 257Control automatizado de una cantera de áridos para dos tolvas de cemento
SÍMBOLO VARIABLE TIPO DE DATO COMENTARIOCNT1 C1 BOOL CONTADORCONFIRMA_PROGRAMA M1 BOOL Memoria que confirma programaTODO_STOP M2 BOOL Memoria "TODO STOP"APOYO_TOLVA1 M3 BOOL Memoria que permite usar la tolva 2, en ausencia de cemento en tolva 1DTC_ACTIVADO M4 BOOL Algún detector DTC1, DTC4, ó DTC5, está activado. Terminará el programa en cursoRT_ON M5 BOOL Algún relé térmico activadoDTC_ON M6 BOOL Cualquier detector activadoY1 Q1 BOOL Electroválvula llenado depósitoM1 Q2 BOOL Motor-bomba depósitoM2 Q3 BOOL Motor tolva 1M3 Q4 BOOL Motor tolva 2M4 Q5 BOOL Motor gravaH_TLV1 Q6 BOOL Aviso, tolva 1 sin cementoH_TLV2 Q7 BOOL Aviso, tolva 2 sin cementoH_DEPOS Q8 BOOL Aviso, depósito sin aguaH_RT Q9 BOOL Relé térmico activadoH_GRAVA Q10 BOOL Aviso, ausencia de gravaTMP_AGUA T1 WORD/BOOL Temporizador que controla el llenado de aguaTMP_TOLVA1 T2 WORD/BOOL Temporizador que controla el llenado de cemento de la tolva 1TMP_TOLVA2 T3 WORD/BOOL Temporizador que gestiona el llenado de cemento de la tolva 2TMP_GRAVA T4 WORD/BOOL Temporizador que gestiona la activación de la cinta transportadora con gravaTMP_MAT T6 WORD/BOOL Temporizador que retrasa la activación de programas, una vez se repone materialS1 I1 BOOL Llave generalS2 I2 BOOL Pulsador parada de emergenciaS3 I3 BOOL Pulsador abre electroválvula llenado depósitoS4 I4 BOOL Pulsador cierra electroválvula llenado depósitoS5 I9 BOOL Pulsador sube programaS6 I10 BOOL Pulsador baja programaS7 I11 BOOL Pulsador confirma programaS8 I12 BOOL Pulsador borra programaDTC1 I5 BOOL Detector mínimo depósitoDTC2 I6 BOOL Detector máximo depósitoDTC3 I7 BOOL Detector mínimo tolva 1DTC4 I8 BOOL Detector mínimo tolva 2DTC5 I13 BOOL Detector de ausencia de grava en la cinta de gravaRT I14 BOOL Relés térmicosDAT_TMP1 MW0 WORD Datos del temporizador aguaDAT_TMP2 MW2 WORD Datos del temporizador motor tolva 1DAT_TMP3 MW4 WORD Datos del temporizador motor tolva 2DAT_TMP4 MW6 WORD Datos del temporizador de la cinta de gravaBAR_DEP_AGUA MW8 WORD Barra gráfica depósito de aguaCNT1 C1 WORD/BOOL Contador principalDAT_CNT MW10 WORD Datos del contador/programa para mostrar en scadaSÓNAR DEPÓSITO AI0 WORD Sensor para medir el llenado del depósito de aguaBAR0_DEP MW12 WORD Variable de apoyo del sónar que mide la profundidad del depósito de aguaBAR_DEPÓSITO MW14 WORD Variable que permite mostrar en el scada el nivel de agua del depósitoSÓNAR TOLVA1 AI2 WORD Sensor para medir el llenado de la tolva 1 de cementoBAR0_TOLVA1 MW16 WORD Variable de apoyo del sónar que mide la profundidad de la tolva de cemento 1BAR_TOLVA1 MW18 WORD Variable que permite mostrar en el scada el nivel de cemento de la tolva 1SÓNAR TOLVA2 AI4 WORD Sensor para medir el llenado de la tolva 2 de cementoBAR0_TOLVA2 MW20 WORD Variable de apoyo del sónar que mide la profundidad de la tolva de cemento 2BAR_TOLVA2 MW22 WORD Variable que permite mostrar en el scada el nivel de cemento de la tolva 2
Tabla 41.1. Listado de variablesusadas en el programa del
autómata programable.
PLC propuesto
Alimentación a 24 V DCsuministrados por fuente dealimentación independiente.
Entradas a 24 V DC.Salidas a relé.Alimentación de salidas
a 24 V AC, suministradospor un transformador.

au
lae
lec
tric
a.e
s
I1
PLC. Módulo de entradas digitales
I113
14
I2 I3
13
14
I4 I5
L+ M PE
13
14
13
14
13
14
13
14
13
14
13
14
1 N
2
PIA10 A
L N PE
QF1
N
230 V AC
24 V DC
230 V AC
Marr
ón
Azu
lN
egro
Marr
ón
Azu
l
Marr
ón
Azu
l
Marr
ón
Azu
l
Negro
Negro
Negro
+24 V DC
0 V
PEA
limenta
ción
Autó
mata
pro
gra
mable
I2 I3 I4 I5 I6 I7 I8 I9 I10 I11 I12
I6 I7 I8 I9 I10
I11
I12
+24 V DC
0 V
PE
+24
VD
C
0V
PE
[S5]
Sube
pro
gra
ma
[S1]
Inte
rrupto
rlla
vegenera
l
[S2]
Sto
pG
enera
l
[S3
]P
uls
ad
or
ab
ree
lectr
ová
lvu
lalle
na
do
de
pó
sito
[S4
]P
uls
ador
cierr
aele
ctro
válv
ula
llenado
depósi
to
[DT
C4]
Dete
ctor
mín
imo
tolv
a2
[DT
C3]
Det
ecto
rm
ínim
oto
lva
1
[DT
C5]
Dete
ctor
caíd
ade
gra
va
[S6]
Baja
pro
gra
ma
[S7]
Con
firm
apr
ogra
ma
[S8]
Borr
apro
gra
ma
[DT
C1]
Dete
ctor
mín
imo
depósi
to
[DT
C2]
Dete
ctor
máxi
mo
depósi
to
70 W
+24
V
0V
L N PE
X1.1-2-3
I13
Marr
ón
Azu
lN
egro
I13
G1
X2.1-2-3 X2.4 X2.5 X2.6 X2.7
X2.8-9 X2.10-11 X2.12-13 X2.14-15
X2.16 X2.17 X2.18 X2.19
X2.20-21
+24
0V
(24)
PE
X2.22 X2.23
DT
C01
DT
C02
DT
C03
DT
C04
DT
C05
X2.24 X2.25 X2.26 X2.27 X2.28 X2.29 X2.30 X2.31 X2.34X2.33X2.32
S1
S2 S3 S4 S5 S6 S7 S8
Cableado de entradas del autómata programable
[RT
]A
lgún
relé
térm
ico
act
ivo
I14
97
98
I14
Fx
Relé
sté
rmic
os
Gráfico 41.3. Conexionado de entradas del autómata programable.
Aplicaciones industrialesControl automatizado de una cantera de áridos para dos tolvas de cemento258

au
lae
lec
tric
a.e
s
Aplicaciones industriales 259Control automatizado de una cantera de áridos para dos tolvas de cemento
PLC. Módulo de salidas digitales
1 N
2
PIA10 A
L N PE
QF2
N
230 V AC
24 V DC
230 V AC
70 W
+24
V
0V
L N PE
X3.1-2-3
2 M
Q1 Q2 Q3 Q4 Q5 Q6 Q7 Q8
3 L+ 3 M
Q9 Q10 Q11
2 L+
Q12
G2A
1A
2
A1
A2
A1
A2
X1
X2
+24 V
0 V
+24 V
0 V
H2
[Y1
]E
lect
rová
lvu
lalle
na
do
de
pó
sito
ag
ua
red
[M1]
Moto
r-bom
ba
agua
[M2]
Moto
rto
lva
1
[M4]
Moto
rgra
va
[H_T
LV1]
Tolv
a1
sin
cem
ento
KM2Y1
[H_D
EP
OS
]D
epósi
tosi
nagua
[H_R
T]
Relé
térm
ico
act
ivado
X1
X2
H8
X1
X2
X1
X2
X1
X2
H5H6 H7
A1
A2
X1
X2
H3
KM3
A1
A2
X1
X2
H4
KM4
Q1
Q2
Q3
Q4
Q5
Q6
Q7
Q8
Q9
X5.1
X5.3 X5.4 X5.5
X5.6 X5.7 X5.8 X5.9
+24
0V
(24)
X5.11 X5.12 X5.14 X5.15 X5.16X5.17
X5.18 X5.19 X5.20 X5.21 X5.22 X5.24
[M3]
Moto
rto
lva
2
[H_T
LV2]
Tolv
a2
sin
cem
ento
[H_G
RA
VA
]A
use
nci
ade
gra
va
X1
X2
H9
Q10
X5.10
X5.23
KM1 H2 H3 H4 H5 H6 H7
X1
X2
H1
X5.2
H1 H8 H9
X5.13
Cableado de salidas del autómata programable
Gráfico 41.4. Conexionado de salidas del autómata programable.
au
lae
lec
tric
a.e
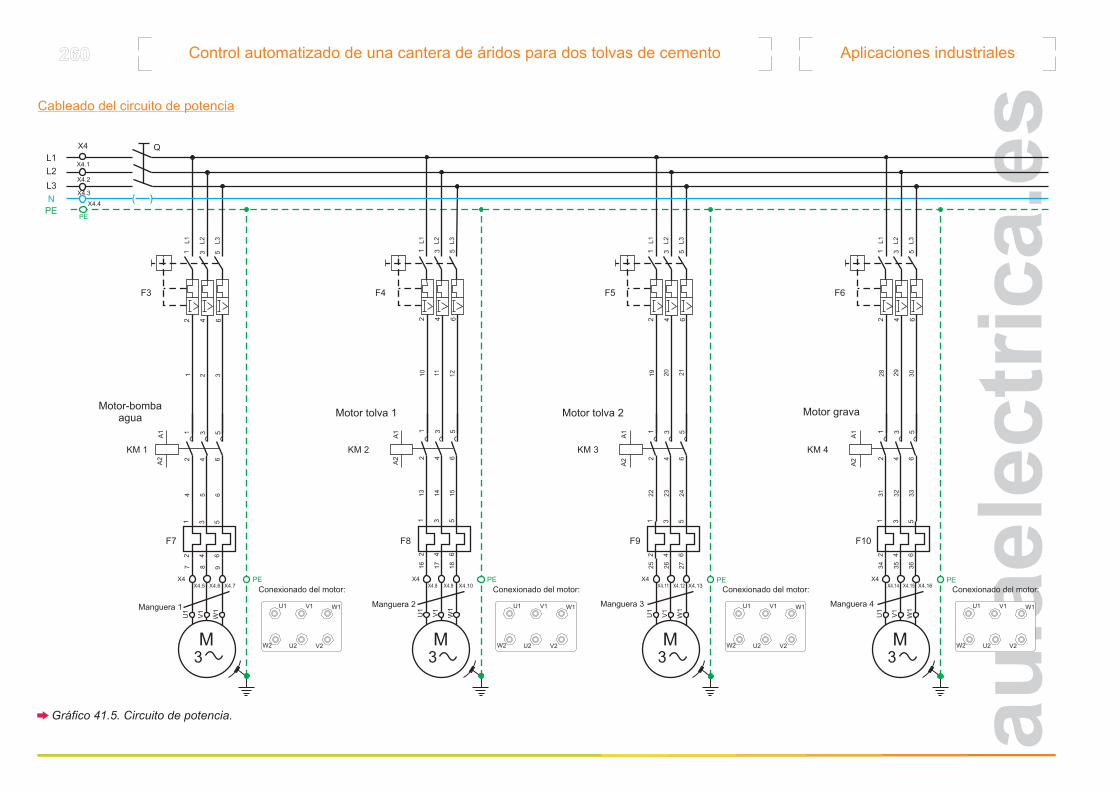
sCableado del circuito de potencia
Gráfico 41.5. Circuito de potencia.
Aplicaciones industrialesControl automatizado de una cantera de áridos para dos tolvas de cemento260
F3
KM 1
A1
A2
F7
M3
L1
L2
L3
X4
Manguera 1
X4.1
X4.2
X4.31 2 3
4 5 6
L1
L2
L3
7 8 9
X4X4.5 X4.6 X4.7
PE
U1 V1 W1
U2 V2W2
Conexionado del motor:
F4
KM 2
A1
A2
F8
M3
Manguera 2
10 11 12
13
14 15
L1
L2
L3
16
17
18
X4X4.8 X4.9 X4.10
U1 V1 W1
U2 V2W2
Conexionado del motor:
F5
KM 3
A1
A2
F9
M3
Manguera 3
19 20
22
23
L1
L2
L3
25
26
27
X4X4.11 X4.12
21
24
X4.13
U1 V1 W1
U2 V2W2
Conexionado del motor:
PE
N
Q
X4.4
1 3 5
2 4 6
U1
V1
W1
1 3 5
2 4 6
1 3 5
2 4 6
1 3 5
2 4 6
U1
V1
W1
1 3 5
2 4 6
1 3 5
2 4 6
1 3 5
2 4 6
U1
V1
W1
1 3 5
2 4 6
1 3 5
2 4 6
Motor-bombaagua Motor tolva 1 Motor tolva 2
F6
KM 4
A1
A2
F10
M3
Manguera 4
28 29
31
32
L1
L2
L3
34
35
36
X4X4.14 X4.15
30
33
X4.16
U1 V1 W1
U2 V2W2
Conexionado del motor:
1 3 5
2 4 6
U1
V1
W1
1 3 5
2 4 6
1 3 5
2 4 6
Motor grava
PE PE PE PE

au
lae
lec
tric
a.e
s
Dest
ino
AD
est
ino
B
Regle
tero
X2
Nº.
Cables
Cables
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Dest
ino
AD
est
ino
B
Regle
tero
X1
Nº.
Cables
Cables
1 2 3
Dest
ino
AD
est
ino
B
Regle
tero
X4
Nº.
Cables
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Dest
ino
AD
est
ino
B
Regle
tero
X5
Nº.
Cables
Cables
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Líne
a23
0V
AC
Neutr
o
PIA
-F1-1
PIA
-F1-N
F1-G
1-P
EP
E
Alim
enta
ción
entr
adas
PLC
atr
avé
sde
F.A
.“G
1”
de
70
W
Dest
ino
AD
est
ino
B
Regle
tero
X3
Nº.
Cables
Cables
1 2 3
Líne
a23
0V
AC
Neutr
o
PIA
-F1-1
PIA
-F1-N
F1-G
1-P
EP
E
Alim
enta
ción
salid
as
PLC
atr
avé
sde
F.A
.“G
2”
de
70
W
G1-2
4V
DC
PLC
-L+-
24V
DC
G1-0
VD
CP
LC
-M
PE
PE
G1-2
4V
DC
S1-1
3
S2-1
3
S3-1
3
G1-2
4V
DC
G1-2
4V
DC
S4-1
3G
1-2
4V
DC
G1-2
4V
DC
G1-0
VD
C
G1-0
VD
C
G1-0
VD
C
G1-0
VD
C
G1-2
4V
DC
G1-2
4V
DC
G1-2
4V
DC
DT
C01
+24V
DC
DTC
01-0
V-A
ZUL
DT
C02
+24V
DC
DTC
02-0
V-A
ZUL
DT
C03
+24V
DC
DTC
03-0
V-A
ZUL
DT
C04
+24V
DC
DTC
04-0
V-A
ZUL
DT
C05
+24V
DC
DTC
05-0
V-A
ZUL
G1-0
VD
C
G1-2
4V
DC
G1-2
4V
DC
G1-2
4V
DC
G1-2
4V
DC
G1-2
4V
DC
S5-1
3
S6-1
3
S7-1
3
S8-1
3
Senso
res
de
entr
ada
haci
aelP
LC
Dis
posi
tivos
de
salid
aco
nect
ados
al P
LC
PLC
-Q1
PLC
-Q2
PLC
-Q3
PLC
-Q4
PLC
-Q5
PLC
-Q6
PLC
-Q7
PLC
-Q8
PLC
-Q9
PLC
-Q10
PLC
-2L+
Y1-A
2
Y1-A
1
Q1 Q2 Q3 Q4 Q5 Q6 Q7 Q8 Q9
Q1 Q2 Q3 Q4 Q5 Q6 Q7 Q8 Q9
KM
1-A
1-H
1-X
1
KM
2-A
1-H
2-X
1
KM
3-A
1-H
3-X
1
KM
4-A
1-H
4-X
1
H5-X
1
H6-X
1
H7-X
1
H8-X
1
H9-X
1
Q10
Q10
FA
-G2-2
4V
DC
+24V
+24V
FA
-G2-0
V
H1-X
2FA
-G2-0
V
H2-X
2
H3-X
2
H4-X
2
H5-X
2
H6-X
2
FA
-G2-0
V
FA
-G2-0
V
FA
-G2-0
V
FA
-G2-0
V
FA
-G2-0
V
H7-X
2
PLC
-2M
FA
-G2-0
V
FA
-G2-0
V
PLC
-3L+
FA
-G2-2
4V
DC
H8-X
2
H9-X
2
FA
-G2-0
V
FA
-G2-0
V
PLC
-3M
FA
-G2-0
V
Circu
itode
pote
nci
a
L1-4
00V
AC
L2-4
00V
AC
L3-4
00V
AC
NE
UT
RO
7
F7-R
T-2
F3-1
F3-3
F3-5
M1-U
1
M1-V
1
M1-W
1
F7-R
T-4
F7-R
T-6
8 9
F8-R
T-2
F8-R
T-4
F8-R
T-6
M2-U
1
M2-V
1
M2-W
1
M3-U
1
M3-V
1
M3-W
1
M4-U
1
M4-V
1
M4-W
1
F9-R
T-2
F9-R
T-4
F9-R
T-6
F10-R
T-2
F10-R
T-4
F10-R
T-6
16 17 18 25 26 27 34 35 36
PE
PE
Cables U1 V1 W1 U1 V1 W1 U1 V1 W1 U1 V1 W1
S1-1
4
S2-1
4
S3-1
4
S4-1
4
DTC0
1-24
DC-N
EGRO
DTC0
2-24
DC-N
EGRO
DTC0
3-24
DC-N
EGRO
DTC0
4-24
DC-N
EGRO
DTC0
5-24
DC-N
EGRO
S5-1
4
S6-1
4
S7-1
4
S8-1
4
PLC
-I1
PLC
-I2
PLC
-I3
PLC
-I4
PLC
-I5
PLC
-I6
PLC
-I7
PLC
-I8
PLC
-I9
PLC
-I10
PLC
-I11
PLC
-I12
PLC
-I13
31 32 33 34
I1 I2 I3 I4 I5 I6 I7 I8 I9 I10 I11 I12 I13
I1 I2 I3 I4 I5 I6 I7 I8 I9 I10 I11 I12 I13
Regleteros
Gráfico 41.6. Regleteros.
Aplicaciones industriales 261Control automatizado de una cantera de áridos para dos tolvas de cemento
A 1

au
lae
lec
tric
a.e
s
Línea 1.
El Pulsador (S3), activa en SET, la electroválvula de llenado del depósito principal dealmacenamiento (Y1). Se podrá detener por:- La no activación del interruptor llave general (S1).- Interruptor de STOP (S2).- Pulsador que anula la orden de activación (S4).- Detector máximo depósito (DTC2).
S3RS
R
S
Y1
S1
S2
S4
DTC2
Línea 2.
Elementos que provocan la parada de un programa en curso:- Interruptor llave general (S1).- Interruptor de STOP (S2).- La activación de cualquier relé térmico de protección de motores.
S2
S1
RT
TODO STOP
CNTC1
Línea 3. Construcción de recetas:
El contador CNT1, permite elegir los programas, donde CNT=1 es programa 1, CNT=2 esprograma 2, etcétera. El pulsador (S5) sube programa, mientras que el pulsador (S6) baja laselección del programa. El pulsador (S8) anula la selección, poniendo el contador a cero.
S5
“100”
R
S6
S8
(Número máximo de programas)
Línea 4.
Si el contador (CNT1), se detiene en la selección 1 (programa 1), y se presiona el pulsador (S7)“confirma programa”, se habilitan los tiempos de este programa a los temporizadores.Esta programación es una “receta” y se pueden repetir tantas como programas se creen.
S7MOVER DATO
60 (segundos) DAT_TMP1
MOVER DATO
70 (segundos) DAT_TMP2
P
CNT1
==1
MOVER DATO
0 (segundos) DAT_TMP3
MOVER DATO
80 (segundos) DAT_TMP4
Aplicaciones industrialesControl automatizado de una cantera de áridos para dos tolvas de cemento262
Programación en LD

au
lae
lec
tric
a.e
sLínea 5.
Si el contador (CNT1), se detiene en la selección 2 (programa 2), y se presiona el pulsador (S7)“confirma programa”, se habilitan los tiempos de este programa a los temporizadores.Note, que a la variable (DAT_TMP3), se le asigna el valor de cero, es decir, al temporizador quehabilita la activación de llenado de cemento de la tolva 2, que en este programa no participa.
S7MOVER DATO
70 (segundos) DAT_TMP1
MOVER DATO
80 (segundos) DAT_TMP2
P
CNT1
==2
MOVER DATO
0 (segundos) DAT_TMP3
MOVER DATO
90 (segundos) DAT_TMP4
Línea 6.
Si el contador (CNT1), se detiene en la selección 4 (programa 4), y se presiona el pulsador (S7)“confirma programa”, se habilitan los tiempos de este programa a los temporizadores.En esta ocasión -por ejemplo- sólo se adquiere cemento de tolva 2 (DAT_TMP3).
S7MOVER DATO
100 (segundos) DAT_TMP1
MOVER DATO
0 (segundos) DAT_TMP2
P
CNT1
==4
MOVER DATO
110 (segundos) DAT_TMP3
MOVER DATO
120 (segundos) DAT_TMP4
Línea 7.
Al presionar el pulsador (S7), para confirmar programa, se activa una memoria (CONFIRMAPROGRAMA), que estará activa sólo el tiempo que dure el programa, y se anulará, cuandoconcluyan todos los vertidos de material al camión.- Note que la memoria (TODO STOP), es una marca que se activa cuando un detector demínimo se ha activado, aunque dejará terminar el programa en curso, no permitirá realizar unnuevo programa hasta que se haya repuesto el material ausente, excepto cemento de tolva 1,que se sustituye por cemento de tolva 2.
S7RS
R
S
CONFIRMAPROGRAMA
TODO STOP
DTC ACTIVADO
TMP_GRAVA
P
Aplicaciones industriales 263Control automatizado de una cantera de áridos para dos tolvas de cemento
au
lae
lec
tric
a.e
s
CONFIRMAPROGRAMA
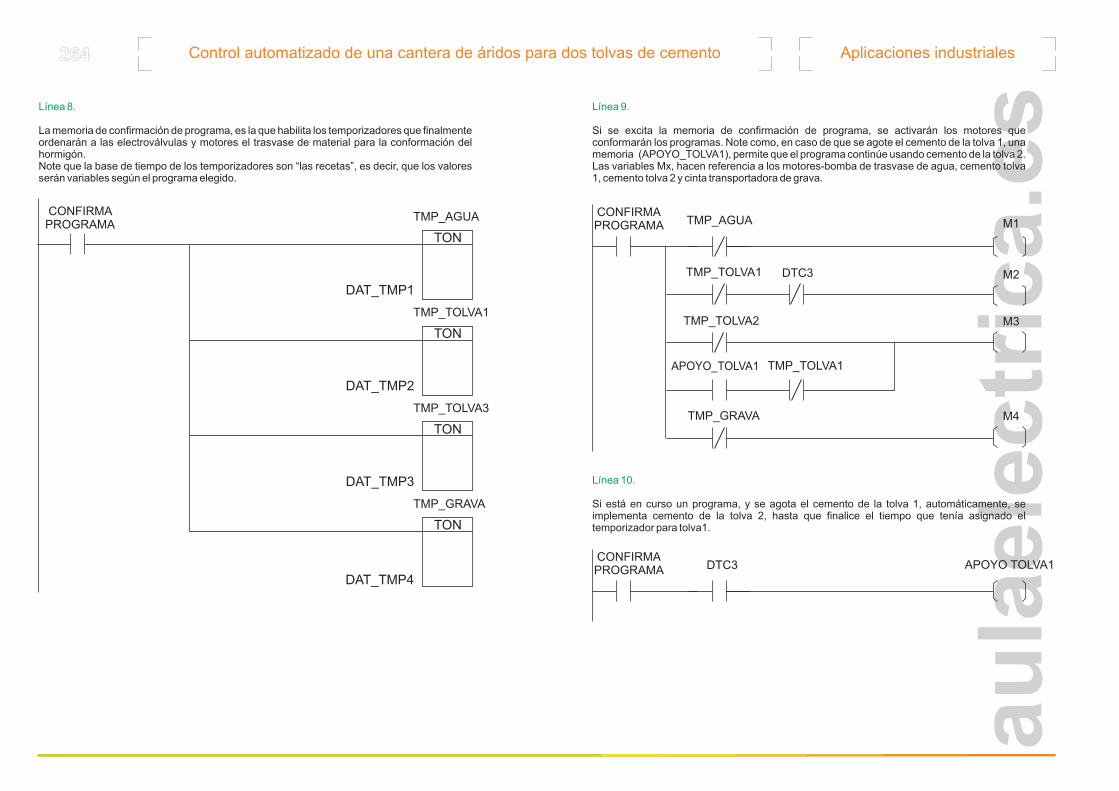
Línea 8.
La memoria de confirmación de programa, es la que habilita los temporizadores que finalmenteordenarán a las electroválvulas y motores el trasvase de material para la conformación delhormigón.Note que la base de tiempo de los temporizadores son “las recetas”, es decir, que los valoresserán variables según el programa elegido.
TON
TMP_AGUA
DAT_TMP1
TON
TMP_TOLVA1
DAT_TMP2
TON
TMP_TOLVA3
DAT_TMP3
TON
TMP_GRAVA
Línea 9.
Si se excita la memoria de confirmación de programa, se activarán los motores queconformarán los programas. Note como, en caso de que se agote el cemento de la tolva 1, unamemoria (APOYO_TOLVA1), permite que el programa continúe usando cemento de la tolva 2.Las variables Mx, hacen referencia a los motores-bomba de trasvase de agua, cemento tolva1, cemento tolva 2 y cinta transportadora de grava.
M1
M2
M3
M4
DTC3
TMP_GRAVA
APOYO_TOLVA1 TMP_TOLVA1
TMP_TOLVA2
TMP_TOLVA1
CONFIRMAPROGRAMA TMP_AGUA
Línea 10.
Si está en curso un programa, y se agota el cemento de la tolva 1, automáticamente, seimplementa cemento de la tolva 2, hasta que finalice el tiempo que tenía asignado eltemporizador para tolva1.
APOYO TOLVA1CONFIRMAPROGRAMA DTC3
DAT_TMP4
Aplicaciones industrialesControl automatizado de una cantera de áridos para dos tolvas de cemento264

au
lae
lec
tric
a.e
sLínea 11.
Si se activa cualquier detector de mínimo, el programa en curso podrá terminar, pero no podráiniciar el siguiente, a no ser que sea únicamente la ausencia de cemento en la tolva 1. Cuandoel material se repone, debe pasar un tiempo (TMP_MAT), antes de anular la memoria (DTCACTIVADO), pasado el cual, se permite la reanudación de programas.
DTC1RS
R
S
DTC ACTIVADO
DTC4
DTC5
TMP_MATDTC1
DTC4
DTC5
Línea 12.
La memoria (DTC_ACTIVADO), excitará el temporizador (TMP_MAT), para que retrase laanulación de la propia memoria, una vez se ha repuesto el material que causó su activación.
DTC_ACTIVADO
TON
TMP_MAT
15 seg.
Línea 13.Avisos.
Si se activa el detector (DTC1), síntoma de ausencia de agua en el depósito, se activará unaviso intermitente (H_DEPOS)
DTC1
H_DEPOS
T.Asín
0,5 seg.
Línea 14.Avisos.
Si se activa el detector (DTC3), síntoma de ausencia de cemento en la tolva 1, se activará unaviso intermitente (H_TLV1)
DTC3
H_TLV1
T.Asín
0,5 seg.
Línea 15.Avisos.
Si se activa el detector (DTC4), síntoma de ausencia de cemento en la tolva 2, se activará unaviso intermitente (H_TLV2)
DTC4
H_TLV2
T.Asín
0,5 seg.
Aplicaciones industriales 265Control automatizado de una cantera de áridos para dos tolvas de cemento
au
lae
lec
tric
a.e
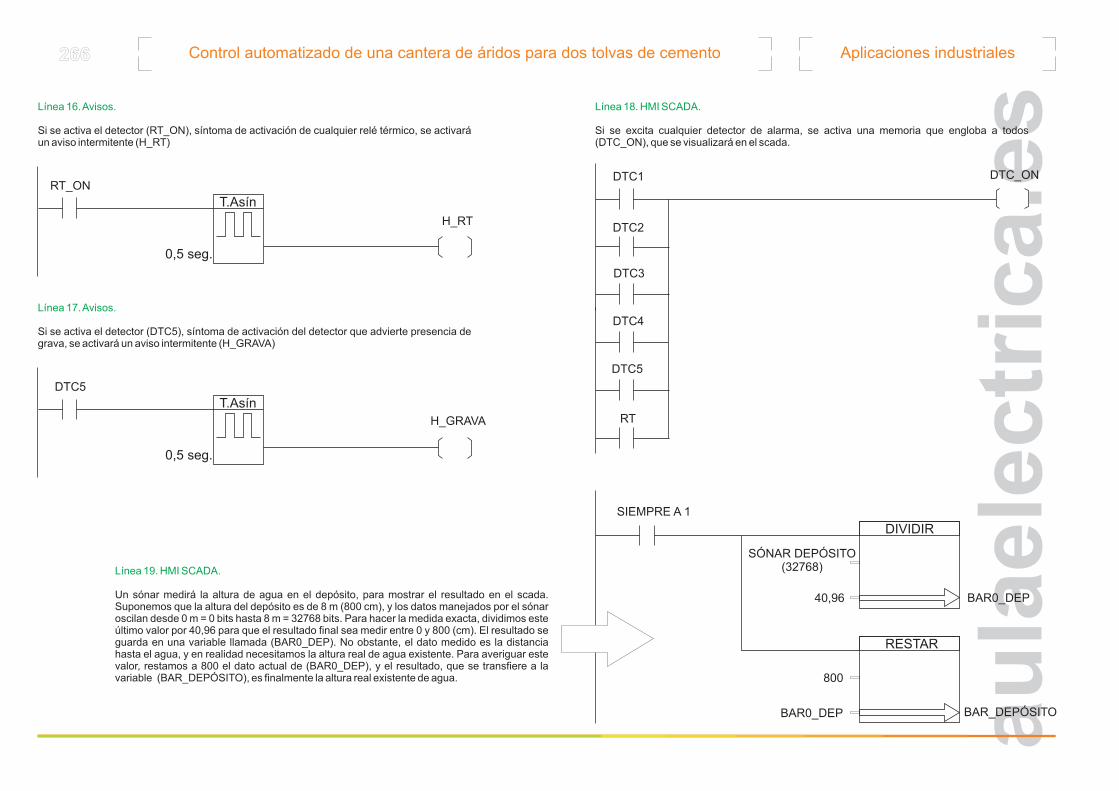
sLínea 18. HMI SCADA.
Si se excita cualquier detector de alarma, se activa una memoria que engloba a todos(DTC_ON), que se visualizará en el scada.
DTC1
DTC2
DTC3
DTC_ON
DTC5
RT
DTC4
Línea 19. HMI SCADA.
Un sónar medirá la altura de agua en el depósito, para mostrar el resultado en el scada.Suponemos que la altura del depósito es de 8 m (800 cm), y los datos manejados por el sónaroscilan desde 0 m = 0 bits hasta 8 m = 32768 bits. Para hacer la medida exacta, dividimos esteúltimo valor por 40,96 para que el resultado final sea medir entre 0 y 800 (cm). El resultado seguarda en una variable llamada (BAR0_DEP). No obstante, el dato medido es la distanciahasta el agua, y en realidad necesitamos la altura real de agua existente. Para averiguar estevalor, restamos a 800 el dato actual de (BAR0_DEP), y el resultado, que se transfiere a lavariable (BAR_DEPÓSITO), es finalmente la altura real existente de agua.
SIEMPRE A 1
DIVIDIR
SÓNAR DEPÓSITO(32768)
40,96
RESTAR
BAR_DEPÓSITO
800
BAR0_DEP
BAR0_DEP
Línea 16.Avisos.
Si se activa el detector (RT_ON), síntoma de activación de cualquier relé térmico, se activaráun aviso intermitente (H_RT)
RT_ON
H_RT
T.Asín
0,5 seg.
Línea 17.Avisos.
Si se activa el detector (DTC5), síntoma de activación del detector que advierte presencia degrava, se activará un aviso intermitente (H_GRAVA)
DTC5
H_GRAVA
T.Asín
0,5 seg.
Aplicaciones industrialesControl automatizado de una cantera de áridos para dos tolvas de cemento266
au
lae
lec
tric
a.e
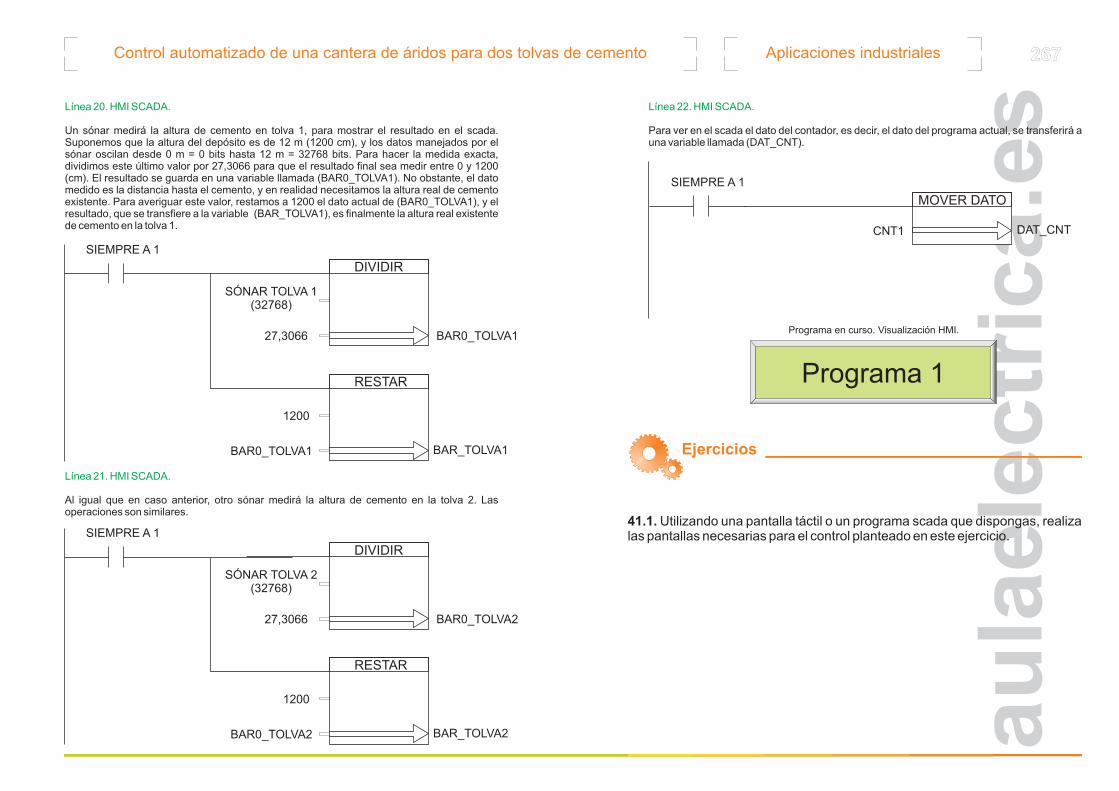
sLínea 20. HMI SCADA.
Un sónar medirá la altura de cemento en tolva 1, para mostrar el resultado en el scada.Suponemos que la altura del depósito es de 12 m (1200 cm), y los datos manejados por elsónar oscilan desde 0 m = 0 bits hasta 12 m = 32768 bits. Para hacer la medida exacta,dividimos este último valor por 27,3066 para que el resultado final sea medir entre 0 y 1200(cm). El resultado se guarda en una variable llamada (BAR0_TOLVA1). No obstante, el datomedido es la distancia hasta el cemento, y en realidad necesitamos la altura real de cementoexistente. Para averiguar este valor, restamos a 1200 el dato actual de (BAR0_TOLVA1), y elresultado, que se transfiere a la variable (BAR_TOLVA1), es finalmente la altura real existentede cemento en la tolva 1.
SIEMPRE A 1
DIVIDIR
SÓNAR TOLVA 1(32768)
27,3066
RESTAR
BAR_TOLVA1
1200
BAR0_TOLVA1
BAR0_TOLVA1
Línea 21. HMI SCADA.
Al igual que en caso anterior, otro sónar medirá la altura de cemento en la tolva 2. Lasoperaciones son similares.
SIEMPRE A 1
DIVIDIR
SÓNAR TOLVA 2(32768)
27,3066
RESTAR
1200
BAR0_TOLVA2
BAR_TOLVA2BAR0_TOLVA2
Línea 22. HMI SCADA.
Para ver en el scada el dato del contador, es decir, el dato del programa actual, se transferirá auna variable llamada (DAT_CNT).
MOVER DATO
CNT1 DAT_CNT
SIEMPRE A 1
Programa 1
Programa en curso. Visualización HMI.
Aplicaciones industriales 267Control automatizado de una cantera de áridos para dos tolvas de cemento
Ejercicios
41.1. Utilizando una pantalla táctil o un programa scada que dispongas, realizalas pantallas necesarias para el control planteado en este ejercicio.
au
lae
lec
tric
a.e
sInformación complementaria
MOVER DATO
0 (segundos) DAT_TMP1
MOVER DATO
0 (segundos) DAT_TMP2
MOVER DATO
0 (segundos) DAT_TMP3
MOVER DATO
0 (segundos) DAT_TMP4
PRIMER CICLODE PROGRAMA
CNTC1S5
“100”
R
S6
S8
(Número máximo de programas)PRIMER CICLODE PROGRAMA
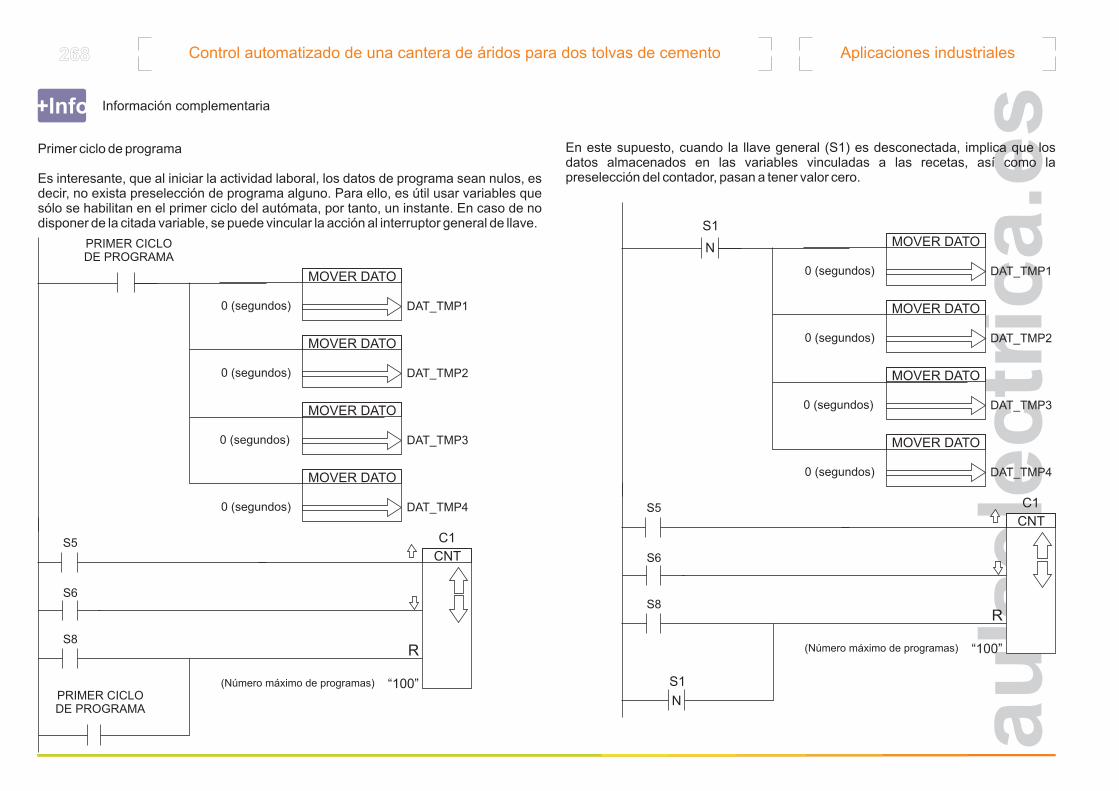
Primer ciclo de programa
Es interesante, que al iniciar la actividad laboral, los datos de programa sean nulos, esdecir, no exista preselección de programa alguno. Para ello, es útil usar variables quesólo se habilitan en el primer ciclo del autómata, por tanto, un instante. En caso de nodisponer de la citada variable, se puede vincular la acción al interruptor general de llave.
MOVER DATO
0 (segundos) DAT_TMP1
MOVER DATO
0 (segundos) DAT_TMP2
MOVER DATO
0 (segundos) DAT_TMP3
MOVER DATO
0 (segundos) DAT_TMP4
CNTC1S5
“100”
R
S6
S8
(Número máximo de programas)
S1
N
S1
N
En este supuesto, cuando la llave general (S1) es desconectada, implica que losdatos almacenados en las variables vinculadas a las recetas, así como lapreselección del contador, pasan a tener valor cero.
Aplicaciones industrialesControl automatizado de una cantera de áridos para dos tolvas de cemento268





























