Embed Size (px)
Citation preview

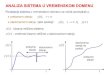
ANALIZA SISTEMA U KOMPLEKSNOM DOMENU
LAPLASOVA TRANSFORMACIJA (LT)
LT je moćan alat za analizu i sintezu linearnih stacionarnih sistema.
Vrste LT: dvostrana i jednostrana
DVOSTRANA LAPLASOVA TRANSFORMACIJA
Dvostrana LT = granice su i (ima teorijski značaj)
Jednostrana LT = granice su 0 i (ima praktični značaj)
f t - original
s j - kompleksna promenljiva
F s - kompleksni lik

Eksponencijaln član ste
u LT ima ulogu da oslabi (priguši) funkciju ( )f t
Integral bez člana ste
:
za ( ) ( ), 1f t h t dt
ne postoji konačna vrednost integrala!
Integral sa članom ste
(LT):
0
( ) ( ), ( ) ( ) 1 1/stef t h t F s h t dt s
L - postoji L
Laplasova transformacija ne postoji za neke funkcije.
Primer. Funkcije tt ,
2te ne poseduju Laplasovu transformaciju.
Funkcije za koje ne postoju LT retko se sreću u praksi.

Primer. Odrediti Laplasovu transformaciju sledeće kauzalne funkcije (funkcije koja traje za pozitivno vreme):
( ) ( )atf t e h t
t
1
t
1
t
1
a>0
t
1
a<0

0!!!!!
( ) ( )
)
0
(
0
00
1( ) ( ) ( )
1
t
at at st a s t a j t
t
t
t
j
t
a
t
t
F s e h t e h t e dt e dt ea s
e ea j
L
Ako je 0a onda je ( ) 0ae ,
( )0 1ae
01 1
( ) 11
F sa j a j s a
, 0a
Ako je 0a onda je ( )ae ,
( )0 1ae
11
( )F sa j
nedefinisano!!!

Oblast konvergencije LT: Re0a s aa

Primer. Laplasova transformacija nekauzalne funkcije (funkcije koja traje za negativno vreme)
( ) ( )atf t e h t
0!!!!!0
0
0
( )
10 0
1( ) ( )
1 1 1,
a j tat st t j ta
t t
t
F s e h t e dt e dt e ea j
a j a j s aa
t
-1
t
-1

Oblast konvergencije: Re0a s aa
ZAKLJUČAK: U prvom i drugom primeru, za dve različite funkcije, dobijene su iste vrednosti Laplasove transformacije, ali oblasti konvergencije se razlikuju
Funkcija Laplasova transformacija Oblast konvergencije
( ) ( )atf t e h t 1
s a Re s a
( ) ( )atf t e h t 1
s a Re s a

LAPLASOVA TRANSFORMACIJA TIPIČNIH FUNKCIJA Jedinična impulsna funkcija
0
0( )( ) ( ) 1,st st s
ts t e t e e st d
L
( ) ( ) ,1t s s
( ) ( ) ,st st s
tt t e dt e e s
( ) ,st e s
Jedinična odskočna funkcija
0 0
( ) ( ) , R1
( e 0)st
st st
s
eH s h t e dt eh t
sdt s
s
L
( ) ( ) 1 , Re 0/h H s st s

Jedinična nagibna funkcija
0 00
2 2
0 0
0 0
0 0
2
0, 0 0
2
, 0
22
( ) ( )
0 0
( )
1R
10 0 , e
tst st
st st
t
t t
t tst st t j t t j t
t t
t t
t t
te eR s th t e dt te dt dt
s s
te e t e e e e
s s s s
e e e e
s s
t
s
r
ss ss
L
0
2( ) ( ) 1 , Re 0/r t R s ss
Eksponencijalna funkcija (videti prethodni primer)
( )
0
1, R( e) at st s a tat e e dt ee h t
s adt s a
L

Sinusna (kosinusna) funkcija
0 0
0 0
0 0
0
0
0
0 0
0 0
2 2
0
( ) cos ( ) cos ( )
cos
1
2
1 1
2 2
1 1 1
2
, Re 0
st
st
j t j t st
s j t s j t
F s t h t t h t e dt
t e dt
e e e dt
e dt e dt
s j s j
ss
s
L

( )f t ( ) ( )f tF s h t L Oblast konvergencije
( )t 1 s
( )h t 1
s Re 0s
( )r t 2
1
s Re 0s
ate
1
s a Re s a
0cos( )t 2 2
0
s
s Re 0s

DIJAGRAM NULA I POLOVA KOMPLEKSNOG LIKA LT
Za većinu realnih kontinualnih funkcija ( )f t , njihovi kompleksni likovi ( )F s mogu se
predstavi u sledećoj formi:
(s)( )
( )
m
n
BF s
A s
Nule kompleksnog lika LT su koreni polinoma ( )mB s :
0 , 1,2,) .( ,im s s z i mB
Polovi kompleksnog lika LT su koreni polinoma ( )nA s
0 , 1,2,) .( ,in s s p i nA
Napomena. Ukoliko su koreni polinoma kompleksni oni se javljaju u parovima sa
jednakim realnim delovima ( ,i jz a jb ili ,i jp a jb )
( )mB s i ( )nA s su polinomi kompleksne promenljives
n , m su redovi odgovarajućih polinoma

Vrednost funkcije u nuli
Neka je , ( ) 0, ( ) 0i j n i m iz p A z B p . Tada važi:
( ) 0( ) 0
( ) ( )
m ii
n i n i
B zF z
A z A z , Nule se mogu nalaziti u oblast konvergencije LT
Vrednost funkcije u polu ( ) ( )
( )( ) 0
m i m ii
n i
B p B pF p
A p , Polovi leže van oblasti konvergencije LT
Faktorizovani zapis
1 0 1 1
1 0
1 1
( ) ( )( )
( )( )
( ) ( )
m
n
i
m m
m
m m i i
n nn
m n
i
i
i
i
iz zs sB s b s b s b
p
F sA s a s a s a
b
s s p
Ka
Primer: 2
2 8 2( 4) ( 4)( ) 2
8 12 2 6 2 6
s s sF s
s s s s s s

Dijagram nula i polova
S-ravan je ravan koju određuju realni i imaginarni deo kompleksne promenljive.
Dijagram nula i polova kompleksnog lika dobija se ucrtavanjem nula i polova u s-ravni pomoću simbola "o" i "x".
Leva poluravan s-ravni
Desna poluravan s-ravni
Imaginarna osa - granica između poluravni
„leva poluravan“
„desna poluravan“
x
x
x x

Primer. Odrediti Laplasovu transformaciju sledeće funkcije i nacrtati njene nule i polove
2 5t te h tf t e h t
Rešenje.
2 6( )
1 1,
2Re 2 Re
66
t tf t e h t e h t
s ss s
L L L
1
2
(s)2 8( ) ,
2 6Re max 2, 6
( )2
BsF s
s s A ss
nula: 1
1
(s) 2 8
4
0B s
z
polovi: 2
1 22 6
( ) ( ) 2 6 0
,
X s A s s s
p p
-2
-6 x x
Oblast konverg. LT

Primer. Odrediti Laplasovu transformaciju funkcije 0cos( ) f t t h t i nacrtati
njene nule i polove ( )F s za 0 0.5 /rad s .
0 0
0 0
0
0
0 0
0 0
2 2
0
1( ) cos ( )
2
1 1
2 2
1 1 1
2
, Re 0
j t j tst st
s j t s j t
F s t h t e dt e e e dt
e dt e dt
s j s j
ss
s
Za 0 0.5 /rad s
2 2( )
0.5
sF s
s
1 0z , 1 0.5p j , 2 0.5p j
X
X

JEDNOSTRANA LAPLASOVA TRANSFORMACIJA
Buduće ponašanje neke promenljive sistema, ( )f t , iskazuje se u odnosu na neki
usvojeni početni trenutak vremena (najčešće 0t ).
Stanje linearnih sistema u trenutku 0t , neposredno pre trenutka 0t , iskazuje se
pomoću početnog uslova promenljive (0 )f .
Jednostrana Laplasova transformacija (donja granica je
0t )
1
0
( ) ( ) ( ) stF s f t f t e dt
L
Napomena. Donja granica 0t omogućava da se obuhvate početni uslovi promenljivih.
Napomena. Ako funkcija ( )f t ne sadrži impulsnu funkciju ( )t , onda se donja granica
0t , može zameniti sa 0t ili 0t .
t
t

OSOBINE JEDNOSTRANE LAPLASOVE TRANSFORMACIJE
Redni broj
f t , 0t F s
1. ( )af t ( )aF s
2. 1 2 3( ) ( ) ( ) ...f t f t f t 1 2 3( ) ( ) ( ) ...F s F s F s
3. ( )n
n
d f t
dt
1
11
(0 )( )
knn k
kk
n d fs
ds F s
t
Napomena. Drugi član ne postoji kod dvostrane LT.
4. 0 0
( )
t t
nf t dt ( )n
F s
s, 0,1,2,...n
5. ( ) atf t e ( )F s a
6. ( )f t a ( )ase F s

7. ( )nt f t ( )
( 1)n
n
n
d F s
ds
8. 1 2 1 2
0
( ) ( )
t
f f f f t d 1 2( ) ( )F s F s
9. lim ( )t
f t
0lim ( )s
sF s
,
Uslovi: Re 0ip i/ili
0ip je jednostruki pol,
gde ip označava polove ( )F s
10. 0
lim ( )t
f t
lim ( )s
sF s

TABILCA LAPLASOVE TRANSFORMACIJE
Redni broj
f t , 0t F s
1. ( )t 1
2. ( )h t 1
s
3. ( )h t , zakašnjanjena ( )h t 1 ses
4. ( ) ( )s t th t 2
1
s
5. 1
( 1)!
nt
n
, n je prirodan broj
1ns
6. ( ) ( )h t h t , pravougaoni impuls 1
(1 )se ss
7. ate, eksponencijalna funkcija
1
s a

8. 1
(1 )atea
1
( )s s a
9. atte 2
1
( )s a
10. 1
( 1)!
n att e
n
, n je prirodan broj
1
( )ns a
11. sin t 2 2s
12. cos t 2 2
s
s
13. 2
1(1 cos )t
2 2
1
( )s s
14. sinate t 2 2( )s a
15. cosate t 2 2( )
s a
s a

INVERZNA LAPLASOVA TRANSFORMACIJA (ILT)
( ) ( )f t F s direktna Laplasova transformacija
0
( ) ( ) ( ) stF s f t f t e dt
L
( ) ( )F s f t inverzna Laplasova transformacija
-1( ) ( ) ( )
j
st
j
f t F s F s e ds
L
Zahteva integraciju kompleksne funkcije.
ILT se teško određuje na osnovu definicije.

Za praktično određivanje inverzne Laplasove transformacija koristimo tablicu Laplasove transformacije.
Ukoliko ( )F s nije tablični slučaj uprošćavanje ( )F s
Faktorizovani oblik funkcije:
1 0 1
1 0
1
( )( )
( )( )
( )
m
m
m i
nn
n
i
i
isb
Ks b s bB s
F sA s a s a s a
s p
z
( )F s se može predstaviti u obliku zbira prostijih racionalnih funkcija, tj. činioca.
Na primer:
1 0 1
1 1
( )( )
( )
m
m n
n n
b s b s b KKB sF s
A s s p s p s p s p
Broj i oblici činioca ( )F s funkcije zavise isključivo od karaktera polova ( )F s .

Razlikujemo četiri karakteristična slučaja:
1. Svi polovi ( )F s su realni i prosti
2. Postoje konjugovano kompleksni polovi, a ako postoje realni, oni su prosti
3. Funkcija ( )F s ima višestruke realne korene
4. Funkcija ( )F s ima višestruke konjugovano kompleksne polove (ne radi se).

1. Svi polovi funkcije ( )F s su realni i prosti
Pretpostavka: 1 0 1
n
n na s a s a s p s p
Razvoj funkcije
1 0 1
1 1
( )( )
( )
m
m n
n n
b s b s b KKB sF s
A s s p s p s p s p
Koeficijenti
( )
, 1,2, ,( )
i
i i
s p
B sK s p i n
A s
Inverzija
-1
1
( ) ( ) i
np t
i
i
F s f t K e
L

Primer. Odrediti inverznu Laplasovu transformaciju funkcije:
23 4 7( )
1 5 8
s sF s
s s s
realni i prosti polovi: 1 2 31, 5, 8p p p
Rešenje: 31 2( )1 5 8
KK KF s
s s s
2
1 1
1
3 4 7 31 ( )
5 8 14s
s
s sK s F s
s s
2
2 5
5
3 4 7 315 ( )
1 8 6s
s
s sK s F s
s s
2
3 8
8
3 4 7 1678 ( )
1 5 21s
s
s sK s F s
s s
5 83 31 167( )
14 6 21
t t tf t e e e

2. Postoje konjugovano kompleksni polovi, a ako postoje realni, oni su prosti
Pretpostavka:
1 0 1 1 3
n
n n
konjugovani
a s a s a s p s p s p s p
1p j
2 1p p j konjugovano kompleksni polovi,
43 , , ..., npp p su realni i prosti
Razvoj funkcije
1 0
1 1 3
3
3
3
1
3
1 1
1
( )( )
( )
m
m
n
n
n
n
n
K K
s p s p
b s b s bB sF s
A s s p s p s p s p
K K
s p s p
a jb a jb
s
K K
s p s pj s j
1
2 1
1
2 1
,
,
,
p j
p p j
K a jb
K K a jb

Koeficijenti *1
1 1 2 1,( )
( )s s
aB s
K s p j K K jA s
b a b
,
( )
, 3,4, ,( )
i
i i
s p
B sK s p i n
A s
Kompleksna funkcija
2 2
3 3
2 2( )
n ni i
i ii i
a s bK Ka jb a jbF s
s j s j s s s ss
2 22 2
3
( ) 2 2n
i
i i
s KF s a b
s ss s
Inverzija
-1
3
( ) ( ) 2 cos 2 sin i
ns tt t
i
i
F s f t e t e t K ea b
L

Primer. Odrediti inverznu Laplasovu transformaciju funkcije:
2
3 7)
32 32(
s sF
ss
ss
Rešenje:
2
2
1,3 32 2 1 10s j jss ps ,
3 3p , 4 3p
31 1 4
31 1 4( )( ) ( ) ( 3) ( 3 )1 1
pp p p
KK K KF s
s s s sj j
, 2 1K K
1
1
3 7( 1 )
( 1 ) ( 1 ) 3 3
19 42
1
19 42
17 70 1700
s j
sK s j
s j s j s s
jj a jb
19
170
42
170
a
b
1
1

2 1
19 42
170 170K K a jb j
3 3 2
3
3 7 13 ( )
152 2 3s
s
sK s F s
s s s
4 3 2
3
3 7 83 ( )
512 2 3s
s
sK s F s
s s s
3
3
3 3
1 1 3
( ) 2 cos 2 sin
1 82 cos 2 sin
15 51
19 42 1 8cos sin
85 85 15 51
19 42
170 11
701
i
ns tt t
i
i
t t t t
t t t t
f t e t e t K e
e t e t e e
e t e t e e
a b

ALTERNATIVA: Metode neodređenih koeficijenata
2
3 2
2
2 2 2
3 7( )
5 8 9 4 6 9 6
2
3 32 2 3
2 3 3
3
s As B C DF s
A C D s B C D s D A C s D B C
s
s
s
ss s ss s
s s
s
3 25 8 9 4 6 9 6 3 7A C D s B C D s D A C s D B C s
sistem jednačina:
0
5 0
9 4 8 3
9 6 6 7
A C D
B C D
A C D
B C D
19
85A ,
61
85B ,
1
15C ,
8
51D

2 2
2 2
2 2
2 22 2
1 19 61
85 1 1
61
19 19
85 1 1
421
19 19
8
1 1 8 1
15 3 51 3
1 1 8 1
15 3 51 3
1 1 8 1
15 1 1
19 1 42 1
85 851 1 1
5 3 51 3
1 1 8 1
15 3 51 31
( )s s
s s
s s
s
s
s
s
s
s
s
s
s s
F s
s
1 1
2 2
1 1
3
2
3
2
19 1 42 1
85 851 1 1 1
19 4
1 1 8 1
15 3 51 3
1 8
15
2cos si
5
(
n5 8
)
18 5
t t t t
s
s
s s
e
sf t
e et e t
LL L L

3. Funkcija ( )F s ima višestruke realne korene
Pretpostavka: 3
1 10 4n n
n sa s ps a a sp ps
1 2 3p p p - realan pol višestrukosti 3
4p , … , np - realni i jednostruki polovi
Razvoj funkcije
1
1
1311 12
3 2
11
0
4
1
3
4
4
( )
n
n
n
m
m
s p ss p
KK K
s ps p s p
p
KK
s p s p
b s b s bF s

Koeficijenti (višestrukost 3)
1
11 1
31 ( )
0! ( )s p
B sK s p
A s
,
1
12 1
31 ( )
1! ( )s p
d B sK s p
ds A s
1
2
1 1
3
3 2
1 ( )
2! ( )s p
d B sK s p
ds A s
Opšta formula (višestrukost )
1
1
1 ( ), 1,2, ,
1 ! ( )i
j
ij ij
s p
d B sK s p j
j ds A s
Inverzija
1 1 1 1
11 12 13
4
21( )
2
np t p t p t p t
i
i
f t K e K e K e Kt et

Primer. Odrediti inverznu Laplasovu transformaciju funkcije:
3
4 9( )
2 3
sF s
s s
Rešenje:
1311 12 4
3 2( )
2 32 2
KK K KF s
s ss s
3
112
2
4 92 ( ) 1
3ss
sK s F s
s
3
12 2
22
32 ( ) 3
3ss
dK s F s
ds s

2
3
13 2
2
12 ( ) 3
2s
dK s F s
ds
4 33
3
4 93 ( ) 3
2s
s
sK s F s
s
3 2
1 3 3 3( )
2 32 2F s
s ss s
2 2 2 2 31( ) 3 3 3
2
t t t tf t t e te e e

ALTERNATIVA: Metode neodređenih koeficijenata
3 3 2
3 2
3
4 9( ) ( )
2 32 3 2 2
7 6 5 16 12 3 6 12 8
2 3
s A B C DF s F s
s ss s s s
C D s B C D s A B C D s A B C D
s s
3 27 6 5 16 12
3 6 12 8 4 9
C D s B C D s A B C D s
A B C D s
sistem jednačina:
0
7 6 0
5 16 12 4
3 6 12 8 9
C D
B C D
A B C D
A B C D
1, 3,
3, 3
A B
C D

PRIMENA JEDNOSTRANE LAPLASOVE TRANSFORMACIJE NA REŠAVANJE LINEARNIH DIFERENCIJALNIH JEDNAČINA SA KONSTANTNIM KOEFICIJENTIMA
Odrediti opšte rešenje diferencijalne jednačine
0 0
( ) ( )k kn m
k kk kk k
d y t d u ta b
dt dt
Rešenje: Primenjujemo jednostranu Laplasovu transformaciju.
0 0
( ) ( )/
k kn m
k kk kk k
d y t d u ta b
dt dt
L
Pravilo:
1 2 (1) ( 2) ( 1)(0 ) (0( ) (0 ) (0 )(
))k
k
k kk k kd f ts f s f sfs F
ts f
d

Dobija se algebarska jednačina
(n 1)POLINOM KOJI ZAVISI OD POČETNIH
USLOVA (0 )
1
0
(
0
, , 0 )
( ) ( ) ( )n m
k k
k n k
k k
f f
a s Y s R s b s U s
1
0 0
( (( )) )n m
k k
nk k
k k
UY s a s b s ss R
0
00
0 0
( )(1
))( ) ( ( )
P
mk
k
kPn n
k k
k k
k k
Y Y
U s
b s
Y s Y s Y s
a s a
s
s
R
0( ) ( ) ( )PY s Y s Y s
1
0 0( ) ( )P Py t Y s Y s y t y t L
( )PY s - rešenje usled pobude
0 ( )Y s - rešenje usled početnih
uslova

OPŠTI POSTUPAK ODREĐIVANJA ODZIVA SISTEMA PRIMENOM LT
Diferencijalna jednačina
ODZIV y(t)
Algebarska jednačina
Rešenje Y(s)

Primer. Odrediti odziv sistema
2
2
( ) ( )7 12 ( ) ( ), (0) 2, (0) 4
d y t dy ty t u t y y
dt dt
( ) 2 ( )tu t e h t
Rešenje.
( ) 7 ( ) 12 ( ) 2 ( ) /ty t y t y t e h t L
2 2 1( ) (0 ) (0 ) 7 ( ) (0 ) 12 ( )
1s Y s sy y sY s y Y s
s s
2 3 2
( ) 7 ( ) 12 ( ) (0 ) 7 (0 ) (0 )1
ss Y s sY s Y s sy y y
s s
1
2
( )
3 27 12) ( ) (0 ) 7 (0 ) (0 )
1R s
ss s Y s sy y y
s s

2 2
ODZIVUSLED POBUDE ODZIV USLED POČETNIH USL A
0
OV
3 2( )
2 10( )
3 2
1 2 7 2 4( )
7
1 3 34
1 1
4
2 7 2
P
sY s
s
s s sY s
sY s
s s s
s s
s
s s
ss
Ukupni odziv:
0
3 22 12 13 2( )( )
1 3 4( )P
B ss s sY s
s s s s A sY sY s
1 2 3 40 0, 1, 3, 4,B s p p p p
( )1 3 4
A B C DY s
s s s s

3 2
0
2 12 13 2 1
1 3 4 6s
s s sA s
s s s s
3 2
1
2 12 13 2 11
1 3 4 6s
s s sB s
s s s s
3 2
3
2 12 13 2 173
1 3 4 6s
s s sC s
s s s s
3 2
4
2 12 13 2 74
1 3 4 6s
s s sD s
s s s s
3 41( ) 1 17 7 ( )
6
t t ty t e e e h t

FUNKCIJA PRENOSA LINEARNIH STACIONARNIH SISTEMA
DEFINICIJA FUNKCIJE PRENOSA PREKO IMPULSNOG ODZIVA SISTEMA
( )( ) ( )( ) ( )g t g tu uy d tt
/ L
( ) (( ) ( ) )() ) ( )( Uu g tt u G sy g t tt s L LL L
( ) ( ) ( )Y s G s U s
( )G s - Laplasova transformacija jediničnog impulsnog odziva sistema.
Lineran, kontinualan, stacionarn SISO sistem sa impulsnim odzivom
( )g t

Definicija. Funkcija prenosa linearnog, stacionarnog sistema definiše se kao Laplasov lik impulsnog odziva ( )g t sistema
( ) ( ) stG s g t e dt
Ukoliko je sistem kauzalan onda se prethodna definicija funkcije prenosa može zameniti sa
0
( ) ( ) stG s g t e dt
Funkcija prenosa predstavlja model sistema u kompleksnom domenu.
Poznajući funkciju prenosa možemo jednostavno odrediti odziv sistema na proizvoljnu pobudu:
( ) ( ) ( )Y s G s U s

DEFINICIJA FUNKCIJE PRENOSA PREKO ULAZNO-IZLAZNIH VELIČINA SISTEMA
Primenom LT na diferencijalnu jednačinu sistema sa nultim početnim uslovima:
-1
-1 1 0-1
-1
-1 0
( ) ( ) ( )( )
( ) ( ) ( )
n n
nn n
m m
m mm
d y t d y t dy ta a a y t
dt dt dt
d u t d u tb b b u t
dt dt
/ L
dobija se algebarska jednačina:
1 1
1 1 0 1 1 0( ) ( )n n m m
n m ms a s a s a Y s b s b s b s b U s
Definišimo loličnik:
1
1 1 0
1
1 1 0
( ),
( )
m m
m m
n n
n
b s b s b s bY sG s n m
U s s a s a s a
Definicija. Funkcija prenosa linearnog, stacionarnog sistema definiše se kao odnos Laplasove transformacije izlazne i ulazne veličine, uz pretpostavku da su svi početni uslovi jednaki nuli.

KARAKTERISTIČNI POLINOM SISTEMA. RED SISTEMA
Funkcija prenosa sistema:
1
1 1 0
1
1 1 0
( )
( )
m m
m m m
n n
n n
b s b s b s b B sG s
s a s a s a A s
Karakteristični polinom sistema:
1
1 1 0
0
( ) ( ) , 1n
n n k
n n k n
k
f s A s s a s a s a a s a
Red sistema = n

NULE I POLOVI FUNKCIJE PRENOSA
1
1 1 0 0 1
1
1 1 0
0 1
( )
( )
( )
mms
m m k
m m k i
n nn nsn
ik
k i
isb sb s b s b s b
G ss a s a s a
pa s s
K
z
K - faktor pojačanja sistema
is z i is p - faktori polinoma u brojiocu i imeniocu funkcije prenosa
Nule prenosne funkcije ( iz ) odgovaraju korenima polinoma u brojiocu funkcije
prenosa.
1
1 1 0
0 1
( ) 0mm
m m s
m m k
k i
ib s b s b s b b s s z
Polovi funkcije prenosa ( ip ) odgovaraju korenima polinoma u imeniocu funkcije
prenosa.
1
1 1 0
0 1
( )i
nnn n s
n k
k i
s a s a s a a s ps

UTICAJ SKRAĆIVANJA NULA I POLOVA SISTEMA NA NJEGOVO PONAŠANJE
Skraćivanje parova jednakih nula i polova je moguće ukoliko su oni locirani u levoj poluravni s-ravni.
Primer.
15 ( 10)( )
sG s
( 1) ( 10)s s 1
15( )
( 1)( 20)( 20)G s
s ss
- Nakon izvršenog skraćivanja nule i pola, broj polova redukovanog modela sistema
1( )G s se smanjuje za 1 u odnosu na originalni sistem ( )G s .
- Red modela redukovanog sistema 1( )G s se smanjuje za 1 (smanjuje se i broj početnih
uslova redukovanog modela).
- Odziv originalnog i redukovanog sistema na istu pobudu je isti.
- Međutim, odzive usled početnih uslova nema smisla porediti, pošto početni uslovi originalnog i redukovanog sistema više nisu isti.

PREDSTAVLJANJE POLOVA U KOMPLEKSNOJ RAVNI
Par konjugovano kompleksnih korena:
1,2
j
np j e
2 2
1,2
1,2arg ( / )
np
p arctg
1,2
cos( ) sin( )
cos sin
jj
n n
j j j
n n
n n
n n
p e e
e e e
j
j
2
1,2 1 cos,n np j
za 0 ( / 2 ) polovi se nalaze levo od Im-ose,
za 0 ( / 2 )desno od Im –ose,
za 0 ( 0 ) polovi se nalaze na Im-osi.
X
X
„s-ravan“

Položaja polova (X) u kompleksnoj ravni u zavisnosti od vrednosti relativnog
koeficijenta prigušenja za konstantno n
X
X
X
X X
X
X
X X X X X
Smer porasta
Smer porasta
Smer opadanja X
X
X
X
X
X
X X
X
X
Smer opadanja
X
X
X
X
X
X X X X X X X

FUNKCIJE PRENOSA NEKIH SISTEMA Čisto transportno kašnjenje
( ) ( ) ( ) ( ) ,( )s sy t u t Y s U s G s see
Diferencijator
( )( ) ( ) ( ) ( ,)
dy ty t Y s sU G ss s
dts
m > n ne može se fizički realizovati !
( )1
sG s
Ts
realni diferencijator n = m
Integrator
1
( ) ( ) ( ) ( ) , Re 01
( )
t
y t u t dt GY s Us
ss
s s

ULOGA PRENOSNE FUNKCIJE U ODREĐIVANJU ODZIVA SISTEMA
1. Odrediti Laplasov lik ulaznog signala
( )U s u t L
2. Odrediti odziv sistema u obliku
Y s G s U s
3. Naći inverznu Laplasovu transformaciju
1 1( ) ( ) ( ) ( )y t Y s G s U s L L

POVEZIVANJE SISTEMA
ELEMENTARNE TRANSFORMACIJE BLOKOVA
1. Paralelna veza dva sistema
1 1
1 2
1 2 1
( )
2( ) ( ) ( ) ( ) ( ) (( ) ) )(
U U G s
Y Y
Y S G s U s G G ss U s U sG s

2. Redna veza dva sistema
1
2
2
12 1
( )
2( ) ( ) ( ) ( ) (( ) ( ))
U G s
U
Y Y
Y S G s G s U s U sG s G s

3. Povratna sprega
( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) 1 ( )
( )
1 ( ) ( )
( ) ( ) ( )
( ) ( )
G s
E s R s H s Y s
Y S G s E s G s R s G s H s Y s
Y S
G s
G s H s
G s H s G s R s
Y s R s
Funkcija spregnutog prenosa
( )
( )1 ( ) ( )
S
G sW s
G s H s
Funkcija povratnog prenosa
( ) ( )W s G s H s

PRAVILA ALGEBRE FUNKCIJA PRENOSA
Redna veza
Paralelna veza
Povratna
sprega
Premeštanje
bloka H iz
povratne
grane

Premeštanje
bloka H iz
direktne
grane
Premeštanje
tačke
račvanja
ispred
bloka G1
Premeštanje
tačke
račvanja
iza
bloka G2

Premeštanje
diskrimina-tora
ispred bloka
G1
Premeštanje
diskrimina-tora
iza bloka G2

Primer. Odrediti funkciju prenosa sistema sa slike:
a) primenom algebre blok dijagrama,
b) analitički

Rešenje. a) Čvor između blokova G3 i G4 može se premestiti iza bloka G4

Funkcija prenosa sistema iznosi
1 2 3 4
3 4 1 2 3 2 1 2 3 4 3
( )( )
( ) 1
G G G GY sG s
U s G G H G G H G G G G H

b) Analitički
4 3 2 1 3 2 4 1
1 2 3 4 3 2 3 4
( ) /Y s G G G G U H Y H Y G H Y
G G G G U H Y G G G
2
4
YH
G3 4 1
1 2 3 4 1 2 3 4 3 2 3 2 3 4 1
G G H Y
G G G G U G G G G H Y G G H Y G G H Y
3 4 1 2 3 2 1 2 3 4 3
1 2 3 4
( ) 1Y s G G H G G H G G G G H
G G G G U
1 2 3 4
3 4 1 2 3 2 1 2 3 4 3
( )( )
( )
1
Y sG s
U s
G G G G
G G H G G H G G G G H

FUNKCIJA PRENOSA MULTIVARIJABILNIH SISTEMA
Posmatra se linearan, stacionaran sistem sa r ulaza i m izlaza, prikazan na slici
Sistem je linearan teorema superpozicije
1 1 2 2( ) ( ) ( ) ( ) ( ) ( ) ( )i i i ir rY s G s U s G s U s G s U s
0,
( )( )
( )
iij
j U k jk
Y sG s
U s

1 11 1 1
1
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
r
m m mr r
Y s G s G s U s
Y s G s G s U s
( ) ( ) ( )Y s G s U s
Matrica G s - matrica funkcija prenosa multivarijabilnog sistema
dim G s r p
broj vrsta G s = broj izlaza sistema
broj kolona G s = broj ulaza sistema

Primer. Odrediti matricu funkcija prenosa multivarijabilnog sistema prikazanog na slici pomoću: a) algebre blok dijagrama, b) analitički.
a) Algebra blok dijagrama
Prema definiciji matrica funkcija prenosa će biti u obliku
1
1 11 12
2
( )( ) ( ) ( )
( )
U sY s W s W s
U s
,
0,
( )( )
( )
iij
j U k jk
Y sW s
U s

11 3 411
21 2 3 4 1 2 3 4
( )( ) ( ) ( )( )
( )1 1
U sG s G s G sG sY
U sG G G G G G G G
2
1
111
1
112
2
0
0
( )( )
( )
( )( )
( )
U
U
Y sW s
U s
Y sW s
U s

b) Analitički
1 1 1 3 Y G U G X
4 2 2 1 X G U G Y - pomoćni signal
1 1 1 3 4 2 2 1Y G U G G U G Y
1 1 1 1 3 4 2 1 2 3 4 1Y GU G G G U G G G G Y
1 1 2 3 4 1 1 1 3 4 21Y G G G G GU G G G U
1 3 411 1 2 11 1 12 2
1 2 3 4 1 2 3 41 1
G G GGY U U W U W U
G G G G G G G G

ZAVISNOST ODZIVA SISTEMA OD RASPOREDA POLOVA I NULA FUNKCIJE PRENOSA
SISTEMA II REDA BEZ KONAČNIH NULA
Funkcija prenosa sistema II reda:
2
2 2( )
2 n
n
n
G ss s
Polovi funkcije prenosa:
2
1,2 1n np j
Nule funkcije prenosa:
ne postoje
X
X

Odskočni odziv sistema II reda sa konjugovano kompleksnim polovima:
2-1 -1
2 2
-1 0 1 20 1 22 2
1( ) ( )
2
, 1, 1, 22
n
n n
n
n n
s t W ss s s s
K K s KK K K
s s s
L L
L
2 2
2
2
2
( ) 1 cos 1 sin 1 ( )1
1 sin 1 ( ), cos1
n n
n
t t
n n
t
n
s t e e h t
eh t


Impulsni odziv sistema II reda
2
-1 2
2 2 2( ) sin 1
2 1
nt
n nn
n n
eg t t
s s
= L

UTICAJ POLOŽAJA POLOVA SISTEMA II REDA NA NJEGOV IMPULSNI ODZIV ( )g t
Oscilacije sa
rastućim amplitudama
X X X X
X X X X
X X X X
Oscilacije sa opadajućim amplitudama
Aperiodični opadajući
odziv
Aperiodični rastući odziv
konstantan odziv
Oscilacije sa konstantnim amplitudama

ODZIV SISTEMI DRUGOG REDA SA JEDNOM KONAČNOM NULOM
Sistem sa dva pola ima i jednu nulu u tački –z:
2
22( )( )
2 n
z
n
nG ss
Gs z s z
sz zs
2 2
2 2 2 2
( (
( )2 2
) )
n n
n n n
z
n
s
z
s
z
s s s s
G s G s
G s
1 1 ( ) ( )
( )
1 1 1)
)1
(
(
z z G s Gs
s t Gs
d
z dtt
s zs
s s t
s
L L

( ) ( ))1
(zsd
dt
zs t
tst
1. Uticaj izvoda d
dt:
U stacionarnom stanju je ( ) 0d
s tdt
Uticaj nule je zanemarljiv u
stacionarnom stanju!
Nula utiče na rad sistema samo u prelaznom režim tako što:
ubrzava rad sistema
povećava njegov preskok.
2. Uticaj nule z :
10 kad z
z Uticaj nule postaje manji ukoliko je se ona
udaljava od imaginarne ose.

Primer. Na slici su prikazani odskočni odzivi tri različita sistema, bez nule i sa konačnim nulama 1, 5z z .
2
4( )
2 4W s
s s
,
2
14( )
2 4W s
s
s
s
,
2
0.8( )
2 4
5W
ss
s s
Bez nule
Sa nulom
Sa nulom
-1 -5
Odskočni odziv sistema
vreme
Dodatna nula:
1. ubrzava odziv sistema
2. povećava preskok

SISTEM NEMINIMALNE FAZE
Sistem koji ima nulu u desnoj poluravni s-ravni.
Javlja se PODBAČAJ u odskočnom odzivu. Primer. Na slici su prikazani odskočni odzivi sistema funkcije prenosa:
2
4 1( )
2 4
sG s
s s
i sistem neminimalne faze funkcije prenosa:
2
4 1( )
2 4
sG s
s s
Sistem neminimalne faze (podbačaj)
Odskočni odziv sistema
vreme

SISTEMI TREĆEG REDA SA DVA KONJUGOVANO KOMPLEKSNA I JEDNIM REALNIM POLOM
Primer. Posmatrajmo sistem 2. reda 1 2
4( )
2 4G s
s s
, i sistem 3. reda sa dva
kompleksna i jednim realnim polom
2 2
4( )
2( ) 4s ps
s s
pG
.
Odskočni odzivi sistema:
1 1 2 2
1 4 1 2( ) ( )
( 2 4) 2 4
sS s G s
s s s s s s s
2 2 22
1 4 1( ) ( )
2 4s 2( ) 4
As BS s G s
s s s ss s ps s
p C
p
2 2
2 22
2 2, ,
2 4 2 4
4
2 4
p p pC
p pA B
p p p p

Kada p
2
2
21
2 4p
p pA
p p
2
2
22
2 4p
pB
p p
2
40
2 4p
Cp p
2 12
1 2( ) ( )
2 4
0sS s S s
s s s s p
Uticaj polova koji su jako udaljeni od imaginarne ose na ponašanje sistema se može zanemariti.
Pol blizak imaginarnoj osi značajno utiče na ponašanje sistema.

Primer.
1 2
2 2
4( )
2 4
4( ) , 1, 5
2) 4(
p
G ss s
G s ps ss p
Sa dodatnim polom -1
Sa dodatnim polom -5
Bez dodatnog pola
-1 -5
Odskočni odziv sistema
vreme
Dodatni pol:
1. usporava odziv sistema,
2. smanjuje vrednost preskoka.

POLOVI I NULE ČIJI SE UTICAJ NA PRELAZNI PROCES MOŽE ZANEMARITI
Dominantni polovi - par konjugovano kompleksnih polova koji su najbliži imaginarnoj osi u s-ravni.
Polovi koji se mogu zanemariti – polovi sa velikom negativnim realnim delom koji je bar 6 puta veći od realnog dela dominantnih polova.
Dominantni polovi
x
x
x
x
x
x
x
x
x
x
Polovi koji se mogu zanemariti

Dipol - Pol i nula jednakih vrednosti.
Uticaj dipola na odziv je neznatan ukoliko se oni nalaze u levoj poluravni s-ravni.
Dipoli u funkciji prenosa se mogu „skratiti“.
Polovi i nule sa približno jednakim vrednostima mogu se aproksimativno smatrati dipolom.
X X
Potpuno skraćivanje pola i nule
X
Približno skraćivanje pola i nule
X X
X

Primer.
21(4
)4
2sG
ss
,
1,2 1 3s j
2
18( )
4
4G s
s
4.5s
2
2
12
2 4
18 4
4 4.5 2 4
4
2)
4(
s s
s s
G ss s
1,2 1 3s j ,
3 4.5s , 1 4z
2
3
38( )
10
4 10sG s
s
2 4 9.5s s
22
2 1
38 10
10 9.5 2
4
2)
4
42 4
(
s s
s
s s
sG s
*
*
o
*
Približno skraćivanje pola i nule

Odskočni odziv sistema za G1, G2 i G3
vreme

Napomena. Skraćivanje pola i nule može se izvesti samo ukoliko su prethodno ispunjeni sledeći uslovi:
1. Skraćeni pol mora biti lociran u levoj poluravni.
2. Za određivanje odziva usled početnih uslova treba koristiti „neskraćenu“ funkciju prenosa iz koje se može rekonstruisati diferencijalna jednačina.
3. Za određivanje odziva usled pobude sasvim je svejedno da li je izvršeno skraćivanje pola i nule u funkciji prenosa.

PREDNOSTI I OGRANIČENJA FUNKCIJE PRENOSA KAO MODELA SISTEMA
Prednosti:
1. Ne zavisi od oblika ulaznog signala.
2. U potpunosti opisuje U/I transformacije linearnih stacionarnih sistema.
3. Operacije nad funkcijama prenosa jednog složenog sistema su relativno jednostavne.
4. Iz funkcije prenosa mogu se dobiti tzv. frekventni modeli sistema.
Ograničenja:
1. Definiše se samo za linearne stacionarne sisteme.
2. Daje U/I zavisnost i ne pruža nikakvu informaciju o unutrašnjoj strukturi i ponašanju sistema.
3. Funkcija prenosa ne uzima u obzir početne uslove sistema.














![[XLS]data. · Web view0. 0. 2. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0](https://img.pdfslide.tips/doc/110x75/5ab13df97f8b9ac66c8c4034/xlsdata-view0-0-2-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0-0.jpg)