Embed Size (px)
DESCRIPTION
copyright by Sunthoai
Citation preview

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 1
Báo cáo thí nghiệm điều khiển số Sinh viên:Trần Thị Thoan Mssv: 20102754 Lớp ĐK TĐH 4 K55 Nhóm : Kíp 2 sáng thứ 4 tuần 29,32,37 Số liệu được giao: Gi6, Lz1, Gw3
BÀI 1. TÌM MÔ HÌNH GIÁN ĐOẠN CỦA ĐCMC Mô hình gián đoạn của ĐCMC
Hình 1: Sơ đồ cấu trúc của ĐCMC kích thích độc lập
Các tham số cơ bản của động cơ một chiều:
- Điện trở phần ứng: RA = 250mΩ - Momen quán tính: J = 0,012kgm2
- Điện cảm phần ứng: LA = 4mH - Hằng số động cơ: ke = 236,8, kM = 38,2
- Từ thông danh định: R = 0,04VS
1.1 Mô hình gián đoạn của đối tượng dòng phần ứng Mô hình đối tượng dòng phần ứng
퐺 (푠) =1푅
.1
1 + 푠푇.
11 + 푠푇
Lệnh Matlab

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 2
Tt=100e-6; Ra=250e-3; La=4e-3; Ta=La/Ra; T1=0.1e-3; T2=0.01e-3; >> km=38.2; ke=236.8;J=0.012;xi=0.04; >> Gi=tf(1,[Tt 1])*(1/Ra)*tf(1,[Ta 1]) Transfer function: 4 --------------------------- 1.6e-006 s^2 + 0.0161 s + 1 a, Sử dụng lệnh c2d của MATLAB để tìm hàm truyền đạt trên miền ảnh z theo phương pháp ZOH, FOH, Tustin với 2 chu kì T1=0.1ms, T2 = 0.01ms Lệnh matlab Gzi1=c2d(Gi,T1,'zoh') Transfer function: 0.009176 z + 0.006577 ---------------------- z^2 - 1.362 z + 0.3656 Sampling time (seconds): 0.0001 >> Gzi2=c2d(Gi,T1,'foh') Transfer function: 0.003298 z^2 + 0.01046 z + 0.001998 ----------------------------------- z^2 - 1.362 z + 0.3656 Sampling time (seconds): 0.0001 >> Gzi3=c2d(Gi,T1,'tustin') Transfer function: 0.004154 z^2 + 0.008307 z + 0.004154 ------------------------------------ z^2 - 1.327 z + 0.3313 Sampling time (seconds): 0.0001 >> Gzi4=c2d(Gi,T2,'zoh')
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 3
Transfer function: 0.0001209 z + 0.0001169 ----------------------- z^2 - 1.904 z + 0.9043 Sampling time (seconds): 1e-005 >> Gzi5=c2d(Gi,T2,'foh') Transfer function: 4.064e-005 z^2 + 0.0001585 z + 3.865e-005 ----------------------------------------- z^2 - 1.904 z + 0.9043 Sampling time (seconds): 1e-005 >> Gzi6=c2d(Gi,T2,'tustin') Transfer function: 5.951e-005 z^2 + 0.000119 z + 5.951e-005 ---------------------------------------- z^2 - 1.904 z + 0.9042 Sampling time (seconds): 1e-005
b,Sử dụng phương pháp đã học để gián đoạn hóa mô hình
thay
푠 = Ta có T =T1
퐺푧푖7 =0.0004z^2
0.0162z^2 − 0.0161z+ 1.6e − 006
T = T2
퐺푧푖7 =4e − 005z^2
0.01611z^2 − 0.0161z+ 1.6e − 006
Lệnh matlab Gzi7=tf([ 0.0004 0 0],[0.0162 -0.0161 1.6e-006],T1) Gzi8=tf([4e-005 0 0],[0.01611 -0.0161 1.6e-006],T2) c, Đồ thị Lệnh matlab step(Gi)

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 4
hold on step(Gzi1) step(Gzi2) step(Gzi3) step(Gzi4) step(Gzi5) step(Gzi6) step(Gzi7) step(Gzi8)
Hình 1: Đồ thị đáp ứng của các hàm truyền dán đoạn tính tay và matlab của đối
tượng dòng phần ứng
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 5
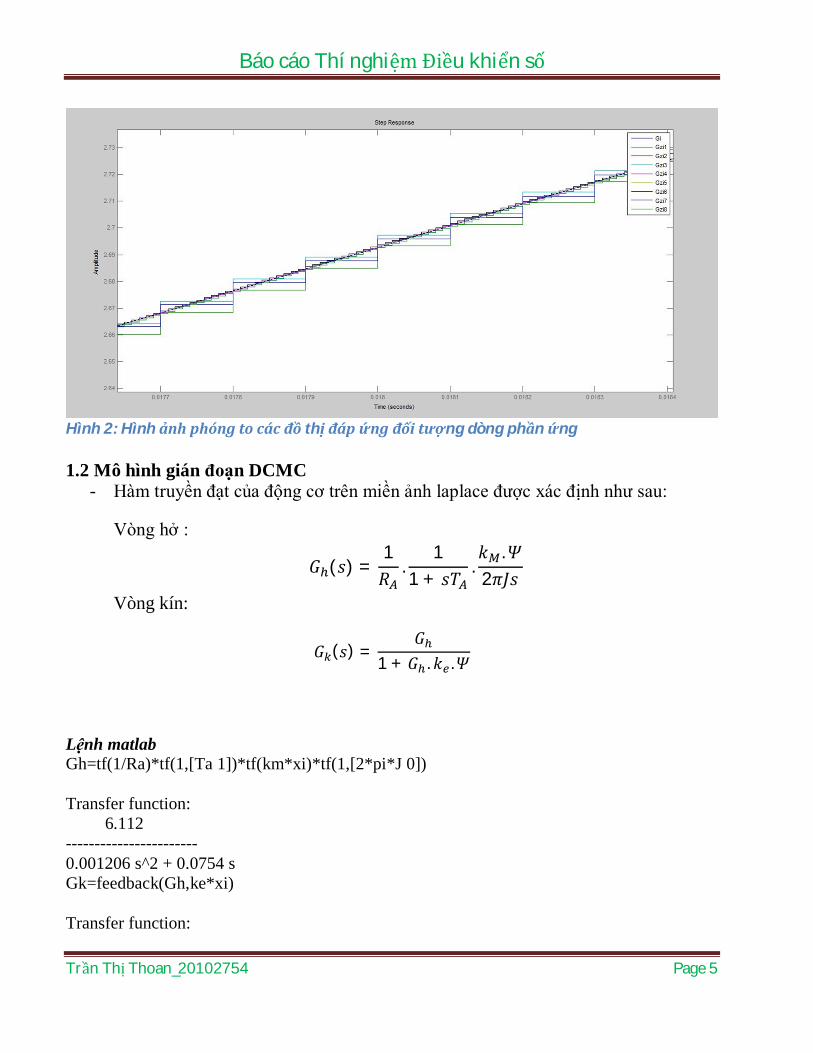
Hình 2: Hình ảnh phóng to các đồ thị đáp ứng đối tượng dòng phần ứng 1.2 Mô hình gián đoạn DCMC
- Hàm truyền đạt của động cơ trên miền ảnh laplace được xác định như sau:
Vòng hở :
퐺 (푠) =1푅
.1
1 + 푠푇.푘 .훹2휋퐽푠
Vòng kín:
퐺 (푠) =퐺
1 + 퐺 . 푘 .훹
Lệnh matlab Gh=tf(1/Ra)*tf(1,[Ta 1])*tf(km*xi)*tf(1,[2*pi*J 0]) Transfer function: 6.112 ----------------------- 0.001206 s^2 + 0.0754 s Gk=feedback(Gh,ke*xi) Transfer function:

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 6
6.112 ------------------------------- 0.001206 s^2 + 0.0754 s + 57.89 a, Sử dụng lệnh c2d của MATLAB để tìm hàm truyền đạt trên miền ảnh z theo phương pháp ZOH, FOH, Tustin với 2 chu kì T1=0.1ms, T2 = 0.01ms Lệnh matlab Gk1=c2d(Gk,T1,'zoh') Transfer function: 2.528e-005 z + 2.523e-005 ------------------------- z^2 - 1.993 z + 0.9938 Sampling time (seconds): 0.0001 >> Gk2=c2d(Gk,T1,'foh') Transfer function: 8.431e-006 z^2 + 3.367e-005 z + 8.404e-006 ------------------------------------------ z^2 - 1.993 z + 0.9938 Sampling time (seconds): 0.0001 >> Gk3=c2d(Gk,T1,'tustin') Transfer function: 1.263e-005 z^2 + 2.525e-005 z + 1.263e-005 ------------------------------------------ z^2 - 1.993 z + 0.9938 Sampling time (seconds): 0.0001 >> Gk4=c2d(Gk,T2,'zoh') Transfer function: 2.533e-007 z + 2.532e-007 ------------------------- z^2 - 1.999 z + 0.9994 Sampling time (seconds): 1e-005 >> Gk5=c2d(Gk,T2,'foh')

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 7
Transfer function: 8.443e-008 z^2 + 3.377e-007 z + 8.44e-008 ----------------------------------------- z^2 - 1.999 z + 0.9994 Sampling time (seconds): 1e-005 >> Gk6=c2d(Gk,T2,'tustin') Transfer function: 1.266e-007 z^2 + 2.532e-007 z + 1.266e-007 ------------------------------------------ z^2 - 1.999 z + 0.9994 Sampling time (seconds): 1e-005 b,Sử dụng phương pháp đã học để gián đoạn hóa mô hình Tính tay Gkz7, Gkz8:
1 1 1( ) * * *1 2 2 (1 )
MH M
A A A A
kG S kR ST JS JR S ST
2
( ) 2 (1 )( )1 ( )* 1
2 (1 )H
M
H A AK
M
A A
kG S JR S STG S
k keG S keJR S ST
22
2 2
1/ 50662 2 62.5 479871A A
AM M
keJR JR s sT S S
k ke k ke
2 2 2 2 2 2 2
( ) 5066 ( )( )( 62.5 47987) ( ) ( ) ( )
KG S A Bs C A B s a C Ba bH SS s s s S s a b S s a b b s a b
2 2 2 2
( cos( )) sin( ){ ( )1 2 cos( ) 2 cos( )
aT aT
aT aT aT aT
z z z e bT C Ba ze bTZ H S A Bz z ze bT e b z ze bT e
1( ) (1 ) ( )G z z H z 2 2
1 12 2
( ) ((2 ) cos( ) sin( ) ) cos( ) sin( )2 cos( )
aT aT aT aT aT
aT aT
A B z A B e bT C e bT B z Ae Be bT C e bTz ze bT e
Với 1C BaC
b
a=31.25;b=216.82;A=0.105570258;B=-0.105570258;C=-6.598141163; 1C =-0.015215711
+Với chu kỳ trích mẫu: 1T =0,1ms

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 8
5 5
272.522394922*2.2576547*10
1.993291132 0.9937691049izG
z z
+Với chu kỳ trích mẫu: 1T =0,01ms 7 7
282.531971794*12.53249*10
1.99937030
98 0.999375195izGz z
-Gõ lệnh trên Matlab >> Gk7=tf([ 2.2576547 e-5+ 2.522394922 e-5],[1 -1.993291132 0.99376949 ],0.0001) Transfer function: 2.258e-005 z + 2.522e-005 ------------------------- z^2 - 1.993 z + 0.9938 Sampling time: 0.0001 >>Gk8=tf([ 2.53249 e-7 2.531971794 e-7],[1 - 1.999370398 0.999375195],0.00001) Transfer function: 2.532e-007 z + 2.532e-007 ------------------------- z^2 - 1.999 z + 0.9994 Sampling time: 1e-005 c, Đồ thị Lệnh Matlab step(Gk) hold on step(Gk1) step(Gk2) step(Gk3) step(Gk4) step(Gk5) step(Gk6) step(Gk7) step(Gk8)

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 9
Hình 3: Đồ thị đáp ứng của các hàm gián đoạn và tính tay hàm truyền ĐCMC

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 10
1.3 Mô hình trạng thái động cơ của ĐCMC trên miền thời gian liên tục Lệnh matlab Gh=tf(1/Ra)*tf(1,[Ta 1])*tf(km*xi)*tf(1,2*pi*J) Transfer function: 6.112 ------------------- 0.001206 s + 0.0754 Gk=feedback(Gh,ke*xi) Transfer function: 6.112 ------------------------------- 0.001206 s^2 + 0.0754 s + 57.89 T3= 0.1; T4= 0.01 [A,B,C,D]=tf2ss([ 6.112],[0.001206 0.0754 57.89]) A = 1.0e+004 * -0.0063 -4.8002 0.0001 0 B = 1 0 C = 1.0e+003 * 0 5.0680

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 11
D = 0 >> [Az1,Bz1]=c2d(A,B,T1) Az1 = 0.9935 -4.7848 0.0001 0.9998 Bz1 = 1.0e-004 * 0.9968 0.0000 >> [Az1,Bz1]=c2d(A,B,T3) Az1 = -0.0438 -2.9271 0.0001 -0.0399 Bz1 = 1.0e-004 * 0.6098 0.2166 >> [Az2,Bz2]=c2d(A,B,T4) Az2 = -0.4989 -133.8566 0.0028 -0.3245
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 12
Bz2 = 0.0028 0.0000 >> G2k1=ss(Az1,Bz1,C,D,T3) a = x1 x2 x1 -0.04376 -2.927 x2 6.098e-005 -0.03995 b = u1 x1 6.098e-005 x2 2.166e-005 c = x1 x2 y1 0 5068 d = u1 y1 0 Sampling time (seconds): 0.1 Discrete-time state-space model. >> G2k2=ss(Az2,Bz2,C,D,T4) a = x1 x2 x1 -0.4989 -133.9 x2 0.002789 -0.3245 b = u1 x1 0.002789 x2 2.759e-005 c = x1 x2 y1 0 5068
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 13
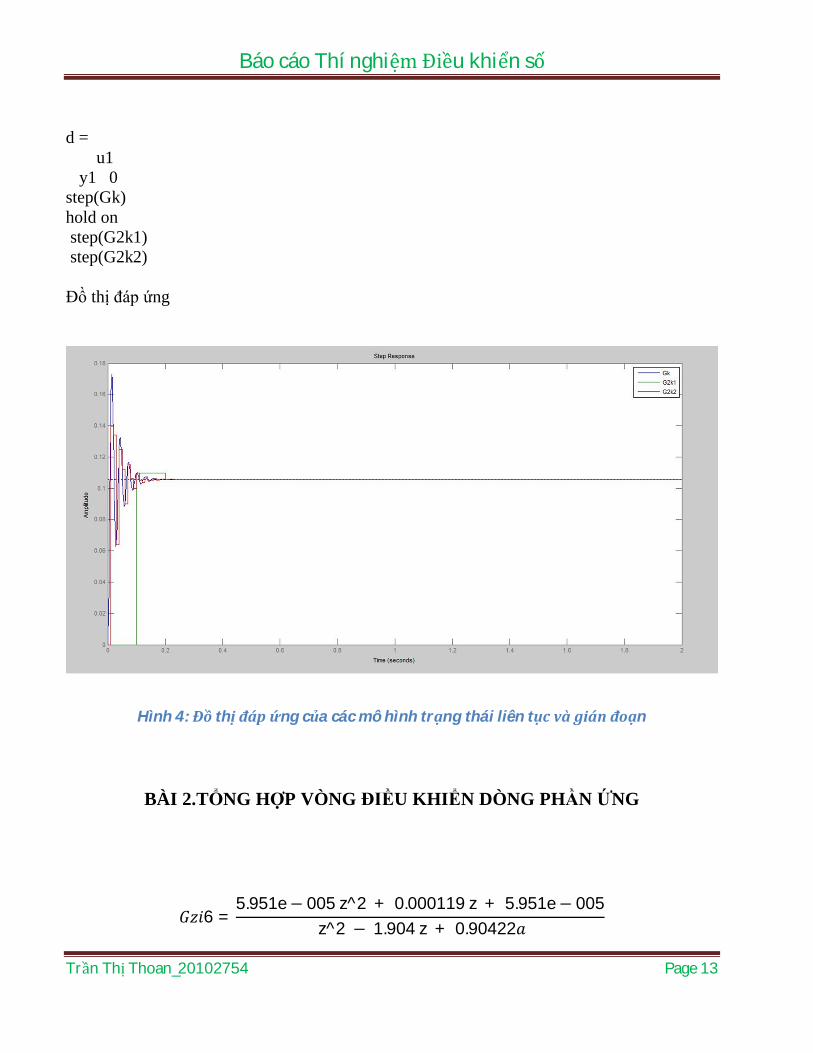
d = u1 y1 0 step(Gk) hold on step(G2k1) step(G2k2) Đồ thị đáp ứng
Hình 4: Đồ thị đáp ứng của các mô hình trạng thái liên tục và gián đoạn
BÀI 2.TỔNG HỢP VÒNG ĐIỀU KHIỂN DÒNG PHẦN ỨNG
퐺푧푖6 =5.951e − 005z^2 + 0.000119z + 5.951e − 005
z^2 − 1.904z + 0.90422푎

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 14
Chuyển sang miển ảnh z mũ âm Lệnh Matlab Gi6=filt([5.951e-005 0.000119 5.951e-005],[1 -1.904 0.9042],T2) Transfer function: 5.951e-005 + 0.000119 z^-1 + 5.951e-005 z^-2 --------------------------------------------
1 - 1.904 z^-1 + 0.9042 z^-2
2.1. Thiết kế bộ điều khiển dòng theo phương pháp Dead-Beat Với đa thức L1(z)= l0 +l1*z^-1 Chương trình matlab ao=1;a1=- 1.904;a2=0.9042; bo=5.951e-005 ; b1= 0.000119;b2=5.951e-005; Az=filt([ao a1 a2],1,T2) Transfer function: 1 - 1.904 z^-1 + 0.9042 z^-2 Bz=filt([bo b1 b2],1,T2) Transfer function: 5.951e-005 + 0.000119 z^-1 + 5.951e-005 z^-2 l0=ao/((ao-a1)*(bo+b1+b2)) l0 = 1.4467e+003 l1=-a1/((ao-a1)*(bo+b1+b2)) l1 = 2.7546e+003 L1z=filt([l0 l1],1,T2) Transfer function: 1447 + 2755 z^-1 Gri=(L1z*Az)/(1-L1z*Bz) Transfer function: 1447 - 3937 z^-2 + 2491 z^-3 ------------------------------------------------

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 15
0.9139 - 0.3361 z^-1 - 0.4139 z^-2 - 0.1639 z^-3 Simulink
Hình 5: Mô phỏng simulink cho bộ điều khiển thiết kế bằng phương pháp Dead-Beat Đồ thị đáp ứng
Hình 6: Kết quả mô phỏng simulink với bộ điều khiển thiết kế bằng phương
pháp Dead-Beat 2.2. Thiết kế bộ điều chỉnh dòng theo phương pháp cân bằng mô hình Gw3=x1*z^-1+x2*z^-2+x3*z^-3

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 16
x1+x2+x3=1 Chọn x1=0.1 x2 =0.4 x3=0.5 Lệnh matlab
Gw= filt([0 0.1 0.4 0.5],1,T2) Transfer function:
0.1 z^-1 + 0.4 z^-2 + 0.5 z^-3 Gri2=Gw/(Gi6*(1-Gw)) Transfer function:
0.1 z^-1 + 0.2096 z^-2 - 0.1712 z^-3 - 0.5903 z^-4 + 0.4521 z^-5 ---------------------------------------------------------------- 5.951e-005 + 0.000113 z^-1 + 2.381e-005 z^-2 - 8.331e -005 z^-3 - 8.33e-005 z^-4 - 2.975e-005 z^-5 Simulink
Hình 7: Mô phỏng simulink cho bộ điều khiển thiết kế bằng phương pháp
CBMH Đồ thị đáp ứng
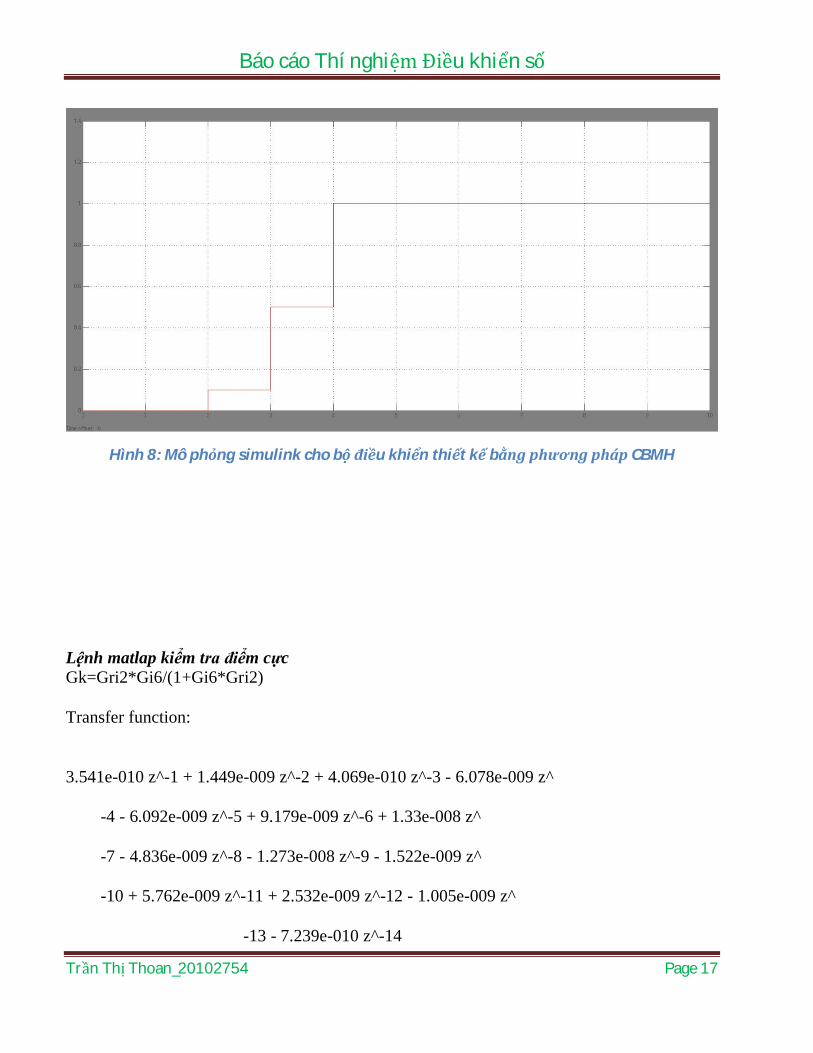
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 17
Hình 8: Mô phỏng simulink cho bộ điều khiển thiết kế bằng phương pháp CBMH
Lệnh matlap kiểm tra điểm cực Gk=Gri2*Gi6/(1+Gi6*Gri2) Transfer function: 3.541e-010 z^-1 + 1.449e-009 z^-2 + 4.069e-010 z^-3 - 6.078e-009 z^ -4 - 6.092e-009 z^-5 + 9.179e-009 z^-6 + 1.33e-008 z^ -7 - 4.836e-009 z^-8 - 1.273e-008 z^-9 - 1.522e-009 z^ -10 + 5.762e-009 z^-11 + 2.532e-009 z^-12 - 1.005e-009 z^ -13 - 7.239e-010 z^-14

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 18
------------------------------------------------------------------- 3.541e-009 + 3.234e-010 z^-1 - 1.493e-008 z^-2 - 2.666e-009 z^ -3 + 2.44e-008 z^-4 + 7.5e-009 z^-5 - 1.903e-008 z^-6 - 9.744e-009 z^-7 + 6.866e-009 z^-8 + 6.034e-009 z^-9 - 8.511e-010 z^-10 - 1.448e-009 z^-11 + 4.911e-025 z^ -12 + 1.823e-025 z^-13 Sampling time (seconds): 1e-005 >> pole(Gk) ans = 0 0 0 0 1.0000 0.9979 + 0.0000i 0.9979 - 0.0000i 0.9061 + 0.0000i 0.9061 - 0.0000i -0.4500 + 0.5454i -0.4500 - 0.5454i -0.9998 + 0.0183i -0.9998 - 0.0183i -0.9998 + 0.0183i -0.9998 - 0.0183i -0.0000 0.0000 Đánh giá: không có điểm cực nằm ngoài vòng tròn đơn vị
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 19
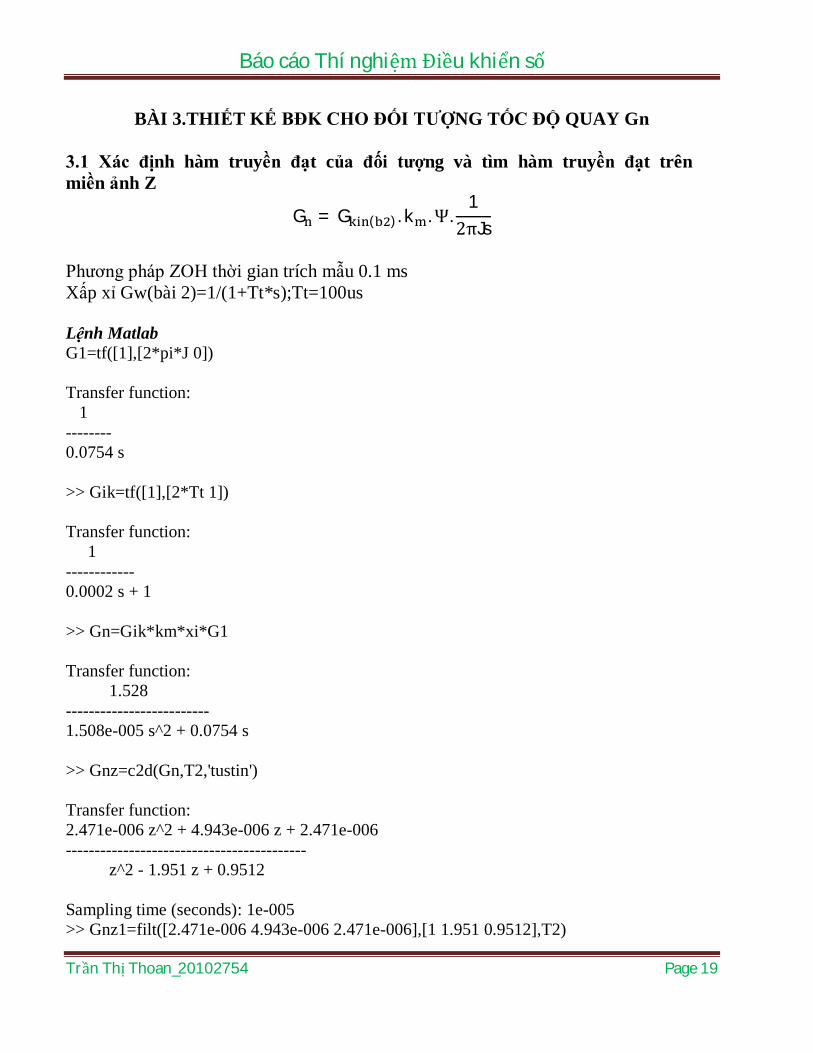
BÀI 3.THIẾT KẾ BĐK CHO ĐỐI TƯỢNG TỐC ĐỘ QUAY Gn 3.1 Xác định hàm truyền đạt của đối tượng và tìm hàm truyền đạt trên miền ảnh Z
G = G ( ). k .Ψ.1
2πJs
Phương pháp ZOH thời gian trích mẫu 0.1 ms Xấp xỉ Gw(bài 2)=1/(1+Tt*s);Tt=100us Lệnh Matlab G1=tf([1],[2*pi*J 0]) Transfer function: 1 -------- 0.0754 s >> Gik=tf([1],[2*Tt 1]) Transfer function: 1 ------------ 0.0002 s + 1 >> Gn=Gik*km*xi*G1 Transfer function: 1.528 ------------------------- 1.508e-005 s^2 + 0.0754 s >> Gnz=c2d(Gn,T2,'tustin') Transfer function: 2.471e-006 z^2 + 4.943e-006 z + 2.471e-006 ------------------------------------------ z^2 - 1.951 z + 0.9512 Sampling time (seconds): 1e-005 >> Gnz1=filt([2.471e-006 4.943e-006 2.471e-006],[1 1.951 0.9512],T2)
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 20
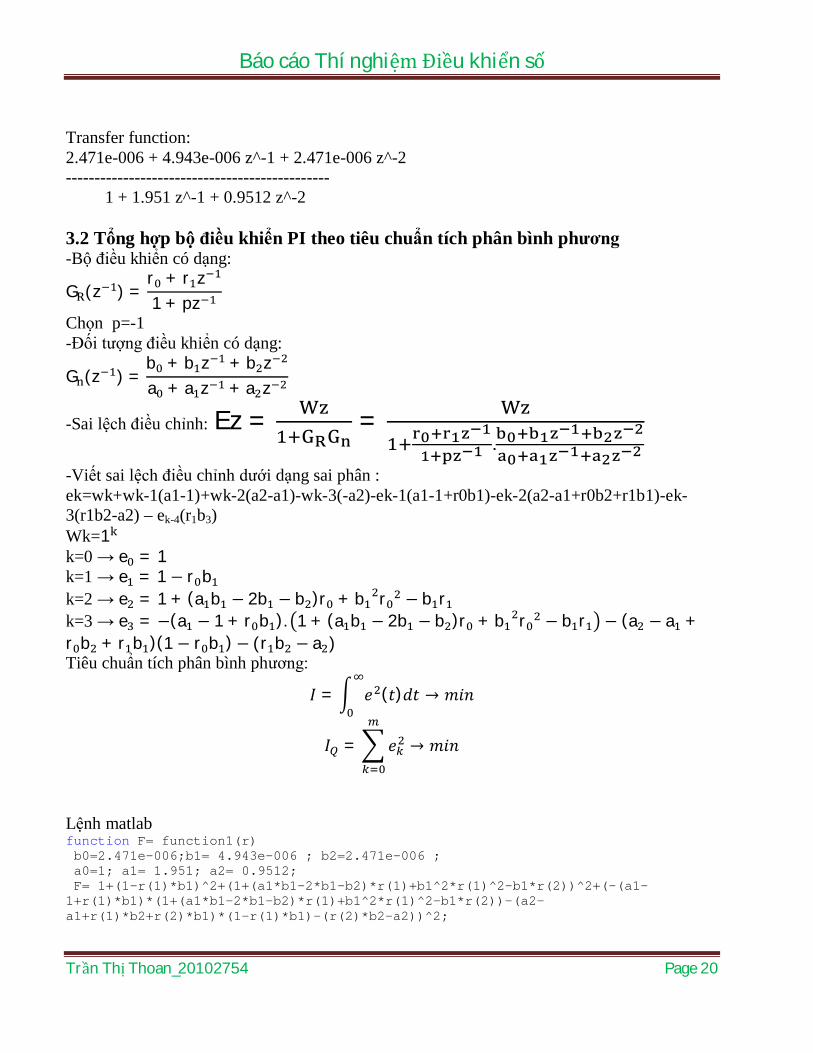
Transfer function: 2.471e-006 + 4.943e-006 z^-1 + 2.471e-006 z^-2 ---------------------------------------------- 1 + 1.951 z^-1 + 0.9512 z^-2 3.2 Tổng hợp bộ điều khiển PI theo tiêu chuẩn tích phân bình phương -Bộ điều khiển có dạng:
G (z ) =r + r z1 + pz
Chọn p=-1 -Đối tượng điều khiển có dạng:
G (z ) =b + b z + b za + a z + a z
-Sai lệch điều chỉnh:Ez = =.
-Viết sai lệch điều chỉnh dưới dạng sai phân : ek=wk+wk-1(a1-1)+wk-2(a2-a1)-wk-3(-a2)-ek-1(a1-1+r0b1)-ek-2(a2-a1+r0b2+r1b1)-ek-3(r1b2-a2) – ek-4(r1b3) Wk=1 k=0 → e = 1 k=1 → e = 1 − r b k=2 → e = 1 + (a b − 2b − b )r + b r − b r k=3 → e = −(a − 1 + r b ). 1 + (a b − 2b − b )r + b r − b r − (a − a +r b + r b )(1 − r b ) − (r b − a ) Tiêu chuẩn tích phân bình phương:
퐼 = 푒 (푡)푑푡 → 푚푖푛
퐼 = 푒 → 푚푖푛
Lệnh matlab function F= function1(r) b0=2.471e-006;b1= 4.943e-006 ; b2=2.471e-006 ; a0=1; a1= 1.951; a2= 0.9512; F= 1+(1-r(1)*b1)^2+(1+(a1*b1-2*b1-b2)*r(1)+b1^2*r(1)^2-b1*r(2))^2+(-(a1-1+r(1)*b1)*(1+(a1*b1-2*b1-b2)*r(1)+b1^2*r(1)^2-b1*r(2))-(a2-a1+r(1)*b2+r(2)*b1)*(1-r(1)*b1)-(r(2)*b2-a2))^2;

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 21
options=optimset('fminunc'); options=optimset(options,'Display','iter','LargeScale','off'); r0=[-100 100]; [r,fval]=fminunc('function1',r0,options) r = 1.0e+005 * 2.0438 2.7231 fval = 1.0172 Simulink
Hình 9: Sơ đồ mô phỏng Simulink Đồ thị scope
Hình 10: Kết quả mô phỏng

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 22
Nhân xét: Với bộ số chọn được từ công cụ optimazation ta thấy bộ điều khiển làm không làm hệ ổn định được. Vậy ta phải chọn bộ số [r0 r1] khác. Ta chọn [ro r1]= [99 -98] Simulink
Hình 11: Simulink đồ thị scope
Hình 12: kết quả mô phỏng

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 23
- Khảo sát hệ thống với tác động của nhiễu đầu vào Simulink
Hình 13: Simulink
đồ thị scope
Hình 14: Kết quả mô phỏng Nhận xét: Mặc dù có tác động của nhiễu đầu vào nhưng bộ điều khiển vẫn đưa hệ thống về giá trị cân bằng mới

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 24
- Khảo sát hệ thống với tác động của nhiễu đầu ra Simulink
Hình 15: Simulink Đồ thị scope
Hình 16: Kết quả mô phỏng
Nhận xét: Mặc dù có tác động của nhiễu đầu ra nhưng bộ điều khiển vẫn đưa hệ thống về giá trị cân bằng.
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 25
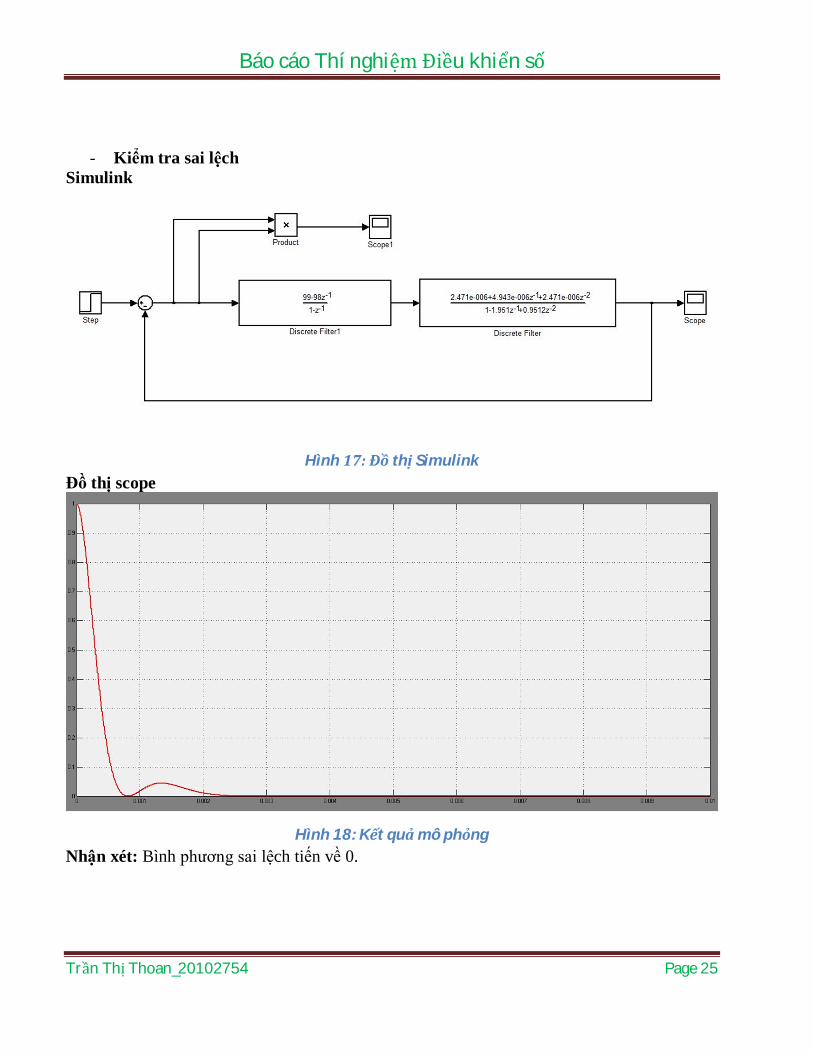
- Kiểm tra sai lệch Simulink
Hình 17: Đồ thị Simulink
Đồ thị scope
Hình 18: Kết quả mô phỏng
Nhận xét: Bình phương sai lệch tiến về 0.

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 26
3.3 Thiết kế bộ điều chỉnh PI theo phương pháp gán điểm cực Đa thức đặc tính của hàm truyền chủ đạo:
2 21 2 0 1 0 1 2
3 20 0 1 1 0 0 1 2 1 1 1 2 0 2 2 1
( ) ( ). ( ) ( ). ( ) ( 1)( ) ( )( )
(1 ) (1 ) ( ) ( )
N z P z A z R z B zz z a z a r z r b z b z b
r b z a b r b r z a a b r b r z a b r
Chọn điểm cực của đối tượng là 1 2 3, ,z z z thì đa thức đặc tính là:
1 2 33 2
1 2 3 1 2 2 3 3 1 1 2 3
( ) ( ).( ).( )
( ) ( )
N z z z z z z zz z z z z z z z z z z z z z z
Cân bằng hệ số, ta có:
1 1 0 0 11 2 3
0 0
2 1 1 1 2 01 2 2 3 3 1
0 0
2 2 11 2 3
0 0
11
1
1
a b r b r z z zb r
a a b r b r z z z z z zb r
a b r z z zb r
2 21 0 1 2 0 0 1 1 1 2
1 2 1 2
1 2 1 22 0 1 2 0 1 2 1 1 2 2 2 1
1 2 1 2
2 2 13
0 0 1 2
( ) . . 1 ( )
( ). .
(1 )
b ab b z z r b r a z zz z z z
z z z zb b z z r b b r z z a a az z z z
a b rzb r z z
푥
=
±
√
푥
=
±
√
Chọn z1,2 = 0.5 ± 0,5j
Giải pt ta được [r0 r1]= [ -204087.522 369685.407] Z3= 0.1521 Simulink

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 27
Hình 19: simulink đồ thị scope
Hình 20: kết quả mô phỏng chọn lại
z1,2 = 0.912 ± 0,0412j giải được [ro,r1]= [-393836.2877 393883.7988] z3= -0.9877 Simulink

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 28
Hình 21: Simulink Đồ thị scope
Hình 22: Kết quả Mô phỏng chọn lại
z1,2 = 0.135 ± 0.333j giải được [ro r1] =[-5656110.03 1388606.737] z3=0.2293 Simulink
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 29
Hình 23: Simulink
Đồ thị scope
Hình 24: kết quả mô phỏng Kết luận: Không chọn được cặp điểm cực mong muốn để hệ ổn định
Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 30
BÀI 4. TỔNG HỢP BỘ ĐIỀU KHIỂN TỐC ĐỘ QUAY TRÊN
KGTT 4.1 Phương pháp phản hồi trạng thái sao cho đáp ứng có dạng PT1 Lấy số liệu từ bài 1.4 Lệnh Matlab p1=[0.59 0.72] K1=acker(Az1,Bz1,p1) G1=ss(Az1-Bz1*K1,Bz1,C,D,T3) step(G1)
p2=[0.5 0.5] K2=acker(Az2,Bz2,p2) G2=ss(Az2-Bz2*K2,Bz2,C,D,T4) step(G2) 4.2. Phương pháp đáp ứng hữu hạn (Deat-beat-gán điểm cực tại gốc tọa độ trên miền ảnh z) Lệnh Matlab p3=[0 0] K3=acker(Az1,Bz1,p3) G3=ss(Az1-Bz1*K3,Bz1,C,D,T3) step(G3) K4=acker(Az2,Bz2,p3) G4=ss(Az2-Bz2*K4,Bz2,C,D,T4) step(G4)
Đồ thị

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 31
Hình 25: Đồ thị Đáp ứng
4.3. Kiểm tra tính điều khiển được và quan sát được a) Tính quan sát được Ma trận quan sát: Q1=obsv(Az1,C) Q1 = 1.0e+003 * 0 5.0680 0.0003 -0.2024 Q2=obsv(Az2,C) Q2 = 1.0e+003 * 0 5.0680 0.0141 -1.6446 Kiểm tra tính quan sát được bằng cách tính hạng của ma trận Q1, Q2 rank(Q1)

Báo cáo Thí nghiệm Điều khiển số
Trần Thị Thoan_20102754 Page 32
ans = 2 rank(Q2) ans = 2 Kết luận hệ quan sát được với 2 chu kì trích mẫu T1, T2 b, Tính điều khiển được Ma trận điều khiển Ct1=ctrb(Az1,B) Ct1 = 1.0000 0.9935 0 0.0001 >> Ct2=ctrb(Az2,B) Ct2 = 1.0000 -0.4989 0 0.0028 Kiểm tra hạng ma trận điều khiển >> rank(Ct1) ans = 2 >> rank(Ct2) ans = 2 Vậy Hệ điều khiển được
The end





























