-
8/8/2019 Ch9 DC Motors
1/66
Electric Machines & Power Electronics
ENEE4301
Chapter 9: DC Motors (only)
DC motors are driven from a dc power supply. Unless otherwise
specified, the input voltage to a dc
motor is assumed constant, because it help simplifies
the analysis and the comparison between different types of
motors.
There are five major types of dc motors in general use:
1) The separately excited dc motor
2) The shunt dc motor
3) The permanent-magnet dc motor
4) The series dc motor
5) The compounded dc motor
-
8/8/2019 Ch9 DC Motors
2/66
Electric Machines & Power Electronics
ENEE4302
The equivalent circuit of a dc motor
Below is the equivalent circuit of a dc motor.
The armature (rotor) circuit is represented by:
an ideal voltage source EA
a resistorRA
(including rotor coils, interpoles and compensating
windings, if present)
a Thevenin equivalent of
the entire rotor structure
-
8/8/2019 Ch9 DC Motors
3/66
Electric Machines & Power Electronics
ENEE4303
The brush voltage drop is represented by asmall battery Vbrush
opposing the direction of
current flow in the machine.
The field coils (producing the magnetic flux in the
motor) are represented by:- an inductorLF
- a resistorRF
Note: resistorRadj is an external variableresistorused to
control the amount of current
in the field circuit.
-
8/8/2019 Ch9 DC Motors
4/66
Electric Machines & Power Electronics
ENEE4304
Some variation and simplifications can be made:
Vbrush may be left out (Vbrush
-
8/8/2019 Ch9 DC Motors
5/66
Electric Machines & Power Electronics
ENEE4305
The internal generated voltage is given by:EA = KJ[
and the torque induced is
Xind = KJIA
The tools necessary to analyse the behaviourand performance of a
dc motorare:
1) Equations for EA and Xind
2) Kirchoffs voltage law (KVL) equation of thearmature
circuit
3) The machines magnetisation curve
-
8/8/2019 Ch9 DC Motors
6/66
Electric Machines & Power Electronics
ENEE4306
The magnetisation curve of a dc machine
EA is directly proportional to the flux in the machine andthe
speed of rotation of the machine.
How is the internal generated voltage related to the field
current in the machine?
The field current IF
produces a field magnetomotive force
(mmf) given by F= NFIF.
This mmf produces a flux in the machine in
accordance with its magnetisation curve shown below.
The magnetisation curveofa ferromagnetic
material (Jvs. F)
-
8/8/2019 Ch9 DC Motors
7/66
Electric Machines & Power Electronics
ENEE4307
,Since, mmfwFI and JfluxwAE , it is c sto ary to presentthe
magnetisation curve as a p ot o
EA vs IF for a given speed [0. ( ig re be ow
EA [= KJ[]
IF [=VF/RF]
Magnetisation curve ofa dc machine
expressed as a plot ofEA vs IF for a fixed
speed [0
-
8/8/2019 Ch9 DC Motors
8/66
-
8/8/2019 Ch9 DC Motors
9/66
Electric Machines & Power Electronics
ENEE4309
Separately excited and shunt dc motors
A separately exciteddc motoris a motorwhose field circuit is
supplied from a separate
constant-voltage power supply.
adjF
F
F
RR
VI
!
The equivalent circuit ofa separately excited dc motor.
-
8/8/2019 Ch9 DC Motors
10/66
Electric Machines & Power Electronics
ENEE43010
Separately excited and shunt dc motors
While a shunt dc motoris a motor whose fieldcircuit gets its
power directly across the armature
terminals of the motor
The equivalent circuit ofa shunt dc motor.
-
8/8/2019 Ch9 DC Motors
11/66
Electric Machines & Power Electronics
ENEE43011
When the supply voltage to a motor is assumedconstant, there is
no practical difference in
behaviourbetween these two motors.
Hence, unless otherwise specified, whenever the
behaviour of a shunt motor is described, theseparately excited
motor is included too.
The KVL equation for the armature circuit of
these motors is: VT = EA + IARA
-
8/8/2019 Ch9 DC Motors
12/66
Electric Machines & Power Electronics
ENEE43012
The terminal characteristic of a shunt dc motor
The terminal characteristic of a machine is aplot of the
machines output quantities versus
each other.
The terminal characteristic ofa motoris A plot
of its output torque vs. Speed Howdoes a shuntdcmotor respondto
a load?
-
8/8/2019 Ch9 DC Motors
13/66
Electric Machines & Power Electronics
ENEE43013
If the load on th shaft of a shunt motor is incr ased,
The output characteristic of a shunt dc motor can be derivedfrom
the induced voltage and torque equations of the motor plus
the KVL.
Xload> XindMotorslows
down ([q)
EAq
= K [q
Armature current
IAo= ( VT-EAq) / RAXindo
(=KJIAo)
Finally,Xind= Xload
at a lower
mechanical
s eed [
-
8/8/2019 Ch9 DC Motors
14/66
Electric Machines & Power Electronics
ENEE43014
From KVL, AAAT RIV ! .
The induced voltage EA= KJ[, so
AATRIKV ! [
Since Xind= KJIA, current IA can be expressed as
J
X
KI
ind
A!
Combining equations (9.4) and (9.5) yields
A
ind
TRV
JJ[ !
(9.4)
(9.5)
(9.6)
-
8/8/2019 Ch9 DC Motors
15/66
Electric Machines & Power Electronics
ENEE43015
Finally, the motor speed is given by:
(9.7)
This equation is just a st aig t li e wit a egative slope.The
resulting torque-speed characteristic of a shunt dc motor isshown
below:
indAT
K
R
K
VX
JJ[
2!
Torque-speed
characteristic ofa shunt or
separately excited dcmotor with compensating
windings toeliminate
a matu e ea tion.
-
8/8/2019 Ch9 DC Motors
16/66
Electric Machines & Power Electronics
ENEE43016
It is important to realize that, in order for the speed of
themotor to vary linearly with torque, the other terms in
thisexpression must be constant as the load changes. Theterminal
voltage supplied by the dc power source isassumed to be constant -
if it is not constant, then thevoltage variations will affect the
shape of the torque-speed
curve.
Another effect internal to the motor that can also affect
theshape of the torque-speed curve is armature reaction. If amotor
has armature reaction, then as its load increases,the
flux-weakening effects reduce its flux. From the motorspeed
equation above, the effect of reduction in flux is to
increase the motors speed at any given load over thespeed it
would run at without armature reaction. Thetorque-speed
characteristic of a shunt motor with armaturereaction is shown
below:
-
8/8/2019 Ch9 DC Motors
17/66
Electric Machines & Power Electronics
ENEE43017
If a motor has compensating windings, there will be no
fluxweakening problems and the flux in the motor will
beconstant.
If a shunt dc motor has compensating windings so that flux
is constant regardless of load, and the motors speed andarmature
current are known at any one value of load, thenit is possible to
calculate its speed at any other value ofload, as long as the
armature current at that load is knownor can be determined.
Torque-speed characteristic of
the motor with armature
reaction present.
-
8/8/2019 Ch9 DC Motors
18/66
Electric Machines & Power Electronics
ENEE43018
Therefore, if shunt otoris onnectedto load (condition
1), andthe otor s eedn1, IA1andEA1are known, hence
1
'
1nKE
AJ!
ssuming the fi ld curr nt is c nst nt and there are no
armature reaction effects, the flux will rem in c nst nt
.Therefore, atan th r l ad c nditi n (condition 2):
2
'
2 nKEA J
Hence, themotor s dat condition 2can ecalculatedusing:
(9.8)
rovid dEA2is known or can b d t rmin dfrom .
nE
En
A
A!
-
8/8/2019 Ch9 DC Motors
19/66
Electric Machines & Power Electronics
ENEE43019
Example 9.1
A 50HP, 250V, 1200 r/min DC shunt motor with compensating
windings has an armature resistance (including the
brushes,compensating windings, and interpoles) of 0.06 ;. Its field
circuit hasa total resistance Radj + RF of 50 ;, which produces a
no-load speed of1200r/min. There are 1200 turns per pole on the
shunt field winding(Figure below)
(a) Find the speed of this motor when its input current is
100A.
(b) Find the speed of this motor when its input current is
200A.
(c) Find the speed of this motor when its input current is
300A.
-
8/8/2019 Ch9 DC Motors
20/66
Electric Machines & Power Electronics
ENEE43020
-
8/8/2019 Ch9 DC Motors
21/66
Electric Machines & Power Electronics
ENEE43021
-
8/8/2019 Ch9 DC Motors
22/66
Electric Machines & Power Electronics
ENEE43022
-
8/8/2019 Ch9 DC Motors
23/66
Electric Machines & Power Electronics
ENEE43023
-
8/8/2019 Ch9 DC Motors
24/66
Electric Machines & Power Electronics
ENEE43024
-
8/8/2019 Ch9 DC Motors
25/66
Electric Machines & Power Electronics
ENEE43025
Speed control of shunt dc motors
Adjusting the fiel
dresistance RF
Adjusting the terminal voltage applied to the armature
Inserting a resistance in series with the armature
circuit - less common method.
iT
R
XJJ[ 2
!
-
8/8/2019 Ch9 DC Motors
26/66
Electric Machines & Power Electronics
ENEE43026
Changing the Field Resistance
1. In easing RF causes IF to de ease. oq! FTF RI
2.Decreasing IF,
de eases J-
3.Decreasing J lo e s EAinstantaneously.
[J qq KEA
4.Decreasing EA causes IA to
in ease.
AATAREVI qo!
5.Increasing IA,
in eases XindNote:IAop edominates overJq.
q!AindIJX
6.Increasing Xi dcauses Xind> Xload,hence moto speeds up
([o).
-
7. Since [o, EA in eases again. oo! J[KEA
8. IncreasingEA causes
IA tode ease . AATA REVI oq
9.
Decreasing IA causes Xi d tode ease until
Xind= Xloadat a highe speed[.qq!
AindIJX
Note: Decreasing RFreverses the whole process and [q.
-
8/8/2019 Ch9 DC Motors
27/66
Electric Machines & Power Electronics
ENEE43027
The effect of increasing the field resistance on theoutput
characteristic of a shunt motor is shown
below.
(b) Over the entire range from no load to
stall conditions(a) Over the normal operating range
The effect of field resistance RF speed control on a shunt
motors torque-speed characteristics
-
8/8/2019 Ch9 DC Motors
28/66
Electric Machines & Power Electronics
ENEE43028
WARNING about field resistance speed control:
As the fluxd
ecreases, the motors:1) no-load speed increases
2) torque-speed curve slope becomes steeper
Figure on previous slide shows the terminal
characteristic of the motorover the whole full
range from no-load to stall conditions (speed = 0).
It is apparent that at very slow speed, an
increase in RFwill actuallyd
ecrease the speed
of the motor.
-
8/8/2019 Ch9 DC Motors
29/66
Electric Machines & Power Electronics
ENEE43029
This is because at very slow speeds, the increase in
IA
(due to decrease in EA) is not large enough to
compensate for decrease in Jin the Xindequation (see
step 5 in the previous table).
With Jdecrease larger than IA
increase,
Xinddecreases
and motor slows down.
Some small dc motors used for control purposes actually
operate at speeds close to stall conditions. For these
motors, an increase in field resistance might have no
effect, or it might even decrease the speed of the motor.Since
the results are not predictable, field resistance
control should not be used in these types of dc motors.
-
8/8/2019 Ch9 DC Motors
30/66
Electric Machines & Power Electronics
ENEE43030
Changing the armature voltage
This method involves changing the voltageapplied to the armature
circuit withoutchanging
the voltage appliedto the field.
In effect the motor must be separately excitedto
use armature voltage control.
-
8/8/2019 Ch9 DC Motors
31/66
Electric Machines & Power Electronics
ENEE43031
1. IncreasingVAcausesIAtoincrease. AAAA REVI oo!
2.IncreasingIA,
increasesXindAindIK q! JX
3.IncreasingXindcausesXind>Xload,he cemotors ee s ([o). -
4. ince[o, EAincreases. oo! JKEA
5.IncreasingEAcausesIAtodecrease .
AATA
REVI oq!
6.DecreasingIAcausesXindtodecrease until
Xind=Xloadata highers eed[.qq!
AiJX
-
8/8/2019 Ch9 DC Motors
32/66
Electric Machines & Power Electronics
ENEE43032
The effect of increasing
VA on the torque-speedcharacteristic of a separately excited
motor is
shown below.
Notice that the no-load speed is shifted by this
method of speed control but the slope of thecurve remains
constant.
-
8/8/2019 Ch9 DC Motors
33/66
Electric Machines & Power Electronics
ENEE43033
Insertinga resistorin series with the
armature circuit
If a resistor is inserted in series with the armature circuit
(RAo), the
effect is to drastically increase the slope of the motors
torque-
speed characteristic, making it operate more slowly if
loaded.
The effect of armature resistance speed control on a shunt
motors
torque-speed characteristics.
The insertion of a resistor is very wasteful since the losses in
the
inserted resistor are very large.Hence, this method for
speedcontrol is rarely used.
.
id
AT
K
R
K
VX
JJ[
2!
-
8/8/2019 Ch9 DC Motors
34/66
Electric Machines & Power Electronics
ENEE43034
Safe ranges of operation for the two common
methods of shunt motor speed control
Fieldresistancecontrol Armature voltagecontrol
the lo er the field curre t,
faster it turns
(IFq, [o)
thelo er thearmature voltage,
slo er it turns (VAq, [q)
thehigher the field curre t,slo er it turns
(IFo, [q)
the higher the armaturevoltage, faster it turns
(VAo, [o)
-
8/8/2019 Ch9 DC Motors
35/66
Electric Machines & Power Electronics
ENEE43035
There is a minimumachi vabl s eed
whe otorsfi l circuithas
maximumpermissiblecurrent lowing.
There is a maximumachievablespee
whe otors armature
voltagereachesitsmaximum
permissible level.
Controls otor s ee s above
basespee ( but not orbelow bases ee s)
If [ < [base, IF > IF,max a field
windings a be da age .
Controls otor s ee s below
basespee (but not forabove bases ee s)
If [ > [base, VA > VA,max a
ar ature windings a be
da age .
-
8/8/2019 Ch9 DC Motors
36/66
Electric Machines & Power Electronics
ENEE43036
Note: If a motor is operating at its rated terminalvoltage,
power and field current, then it will be
running at rated speed orbase speed.
Hence, the two speed control techniques are
complementary. There is significant difference in torque and
power limits on the machine under these two
types of speed control.
In either case, the limiting factoris heating of
armature conductors (i.e. it places upper limit on
the magnitude of armature current IA)
-
8/8/2019 Ch9 DC Motors
37/66
Electric Machines & Power Electronics
ENEE43037
Fi ldresistance control
controls otor speeds above base
speed
Ar ature oltage controlcontrols otor speeds belo base
speed
y flu decreases ([ increase) y flu is constanty Xmaxmust
decrease,
i.e.XmaxwJw 1/[(to ensure IA,max not exceeded)
y Xmax= constant(regardless of the speed)
y Pmax= constant y Pmaxw[
-
8/8/2019 Ch9 DC Motors
38/66
Electric Machines & Power Electronics
ENEE43038
Note:
and
The shuntd
c motor power and
torque limitations forsafe operation as a function of speed are
shown below.
max,max AIKJX !
[X maxmax !P
RF control
-
8/8/2019 Ch9 DC Motors
39/66
Electric Machines & Power Electronics
ENEE43039
-
8/8/2019 Ch9 DC Motors
40/66
Electric Machines & Power Electronics
ENEE43040
-
8/8/2019 Ch9 DC Motors
41/66
Electric Machines & Power Electronics
ENEE43041
-
8/8/2019 Ch9 DC Motors
42/66
Electric Machines & Power ElectronicsENEE430
42
-
8/8/2019 Ch9 DC Motors
43/66
Electric Machines & Power ElectronicsENEE430
43
The effect of an open field circuit
As RF is increased, the motor speed increases.
What happens if the field circuit were actually opened
while the motor is running?
y The flu in the machine would drop drasticall (i.e. allthe way
down to Jres).
y Hence, EA (= KJ[)also drops.y This causes reall enormous
increase inIA.y Since Xind wIA, the induced tor ue would be quite a
bit
higher than load tor ue in the motor.y Therefore, motors
speedrises and eeps going up.
-
8/8/2019 Ch9 DC Motors
44/66
Electric Machines & Power ElectronicsENEE430
44
Therefore, in a shunt dc motor operating with lightfields,
armature reaction can be severe such
that increase in loads can weaken its flux
enough to cause motors speed to rise.
However, most loads have torque-speed curveswhose torque
increases with speed.
-
8/8/2019 Ch9 DC Motors
45/66
Electric Machines & Power ElectronicsENEE430
45
Runaway!
This continues until motor overspeeds. This ondition
isknownasrunaway.
Increased
speed[Increases
load
Increases
armature
reaction
More flux
weakening
urther
increasein
speed[
-
8/8/2019 Ch9 DC Motors
46/66
Electric Machines & Power ElectronicsENEE430
46
The permanent magnet dc motor (PMDC)
PMDC is a dc motor whose poles are made of
permanent magnets.
Advantage (compared to shunt dc motor):
1) No external field circuit is required, no field circuit
copper
losses
2) Smallerthan shunt dc motors because of no field circuit
Disadvantages:
1) Cannot produce high flux density as an externally
supplied shunt dc motor lower induced torque per
ampere of armature current compared to a shunt motor ofsame
size.
-
8/8/2019 Ch9 DC Motors
47/66
Electric Machines & Power ElectronicsENEE430
47
2) Runs the risk ofdemagnetisation due to armature
reaction or excessive heating during prolonged periods of
overload.
The PMDC is basically the same machine as a shunt dc
motorexcept the flux in the PMDC motor is fixed.
Speed control through varying the field current or
flux is not possible.
Hence, speed control methods forPMDC motors are:
1) Armature voltage control
2) Armature resistance control
-
8/8/2019 Ch9 DC Motors
48/66
Electric Machines & Power ElectronicsENEE430
48
The series dc motor
A series dc motor contains field
wind
ings ofrelatively few turns connected in series with the
armature circuit.
The equivalent circuit:
-
8/8/2019 Ch9 DC Motors
49/66
Electric Machines & Power ElectronicsENEE430
49
Inthe series dc otor,
IA = IS= IL
The KV e uationforthis otoris:
SAAAT
RRIEV !
armat re
c rrent
fie
c rrent
line
c rrent
-
8/8/2019 Ch9 DC Motors
50/66
Electric Machines & Power ElectronicsENEE430
50
Induced torque in a series dc motor
The asic eha iourof a seriesdc otorisdue tothe factthatthe fl
xis irectly roportional toIA, at eastuntilsaturation
is reachedi.e.
AScIcI !!J
where c constantof roportiona ity.
sloadincreases (IAincreases), fluxJincreasestoo.
This causesspeed[todecrease.
Hence, the series dc otor has a sharply droopin tor ue-
speedcharacteristic.
-
8/8/2019 Ch9 DC Motors
51/66
Electric Machines & Power ElectronicsENEE430
51
The inducedtorque isgive by Aind IJX ! .
By substituting for, the induced torque in the series dc
machineis
2Aind KcI!X
Torque inaseries dcmotorisproportional to
the square ofitsarmature current.
Therefore, this motor is used in applications requiring veryhigh
torques.
Exam le starter motors in cars, elevator motors a d tractor
motorsinlocomotives.
The terminal characteristic of a series dc
-
8/8/2019 Ch9 DC Motors
52/66
Electric Machines & Power ElectronicsENEE430
52
The terminal characteristic of a series dc
motor
Assumption: The magnetisation curve is linear
(nosaturation).
Hence, flux in the machine is given by equationA
cI!J .
erivationoftorque-speedcharacteristiccurve
1.KV for series dc motor, SAAAT
RRIE !
2.From torque equation, KcI indA X!
-
8/8/2019 Ch9 DC Motors
53/66
Electric Machines & Power ElectronicsENEE430
53
1. lso, JKEA ! . ence,bysubstitutingforEAandIA intothe L
equation
SA
i
cKV !
XJ[
2.If the flux canbe eliminated from this expression, it
willdirectlyrelate the torqueofamotorto itsspeed. Notice that
cIA
J! , thus JX cKind ! . Therefore,
ind
K
cXJ!
3.Bysubstituting thisfluxexpression into theequationinpart
3andsolvingforspeed, theresultingtorque-
speed relationship fortheseries dcmotor is
-
8/8/2019 Ch9 DC Motors
54/66
Electric Machines & Power ElectronicsENEE430
54
K
RR
TK
SA
i
T
!
1
[
Notice that for an unsaturated series motor,ind
X
[
1w
This ideal torque-speedcharacteristic is plotted below:
-
8/8/2019 Ch9 DC Motors
55/66
Electric Machines & Power ElectronicsENEE430
55
Disadvantage ofseriesdc otor:
When the tor ue goes to zero, speedgoes to infinity ifno
load is connected to the motor, it can turn fast enough
toseriously damage itself.
Warning!Never com letely unload a seriesmotorNever connectmotor
to a load by a belt orothermechanismthat could brea . Use steel
chains instead.
-
8/8/2019 Ch9 DC Motors
56/66
Electric Machines & Power ElectronicsENEE430
56
Speed Control
There is onlyoneefficient ayto change the s eed of a seriesdc
motor:Bychanging the terminal voltage
IfVTisincreased, the speed increasesfor any given torque
-
8/8/2019 Ch9 DC Motors
57/66
Electric Machines & Power ElectronicsENEE430
57
Example 9.5
A series dc motor with VT=250V , totalRA+Rs=0.08 ohm , field
circuit consists of 25 turns
per pole. Magnetizing curve is given in Fig. 9-22
a) Find the speed and induced torque of this motorfor when the
armature current is 50A
-
8/8/2019 Ch9 DC Motors
58/66
Electric Machines & Power ElectronicsENEE430
58
The compoundeddc motor
A compounded dc motor is a motor with both ashunt and a series
field.The equivalent circuit of
the compounded motor is shown below:
Current flowing into adot produced positivemmf.
-
8/8/2019 Ch9 DC Motors
59/66
Electric Machines & Power ElectronicsENEE430
59
Cumulative compound
ing current flows intodots on both field coils.Hence, resulting
mmfs
add to give a larger total mmf.
Differential compounding current flows into
dot on one field coil and out of the dot on theother.Hence,
resulting mmfs subtract
-
8/8/2019 Ch9 DC Motors
60/66
Electric Machines & Power ElectronicsENEE430
60
Therearetwoco pon ntsofflu :y on isconstantandy anoth r whi h is
proportional toIA (and hence to the
load)
Thus, CC otorhas:
y high rstartingtor uethanashunt otor(whosefluxisonstant)
y but a low r starting tor ue than a s ri s otor
(whoseentirefluxisproportionaltoIA)
Co bin sb stfeaturesofboththeshuntandseries
otors.
-
8/8/2019 Ch9 DC Motors
61/66
Electric Machines & Power ElectronicsENEE430
61
Advantages ofCC otor:y e tratorquefor starting(like series
otor)y does notoverspeedatnoload(like shunt otor)
Atlightload
s:y series fieldhas ery s alleffecty motor eha es
approximatelyli ea shuntdc motor
As loadgets verylarge:
y series flux ecomes uiteimportanty tor ue-speed ur e egins to
look li e a series motors
haracteristic
-
8/8/2019 Ch9 DC Motors
62/66
-
8/8/2019 Ch9 DC Motors
63/66
Electric Machines & Power ElectronicsENEE430
63
T
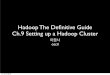
he torque-speed
characteristics ofad
ifferentiallycompoundeddcmotor
In a differentially co pounded dc otor, the shunt fand
series fsubtractfro each other.
Therefore, asthe loadincreases:
y IAincreases(Jse ieso IAo)y flu Jdecreases(Jnetq = Jshunt- Jse
ieso)
Si e Jdecreases, speed[increases.
The i rease i s eed causesanotherincreasein load, whi h
furtheri reasesIA, further decreasi g the flux, and i reasi gthe
s eed agai
-
8/8/2019 Ch9 DC Motors
64/66
Electric Machines & Power ElectronicsENEE430
64
The result:differentially compounded motor is unstable and
tends toruna ay.
This instabilit is much orse than that of a shunt dc moto
with armature reaction. It is so bad that a
differentiallcompoundedmotor is unsuitable forany application.
-
8/8/2019 Ch9 DC Motors
65/66
Electric Machines & Power ElectronicsENEE430
65
It is also impossible to starta differentiall com ounde
motor.
At startingconditions:
y The armature current and series field current are
veryhigh.
y S
ince the series flux subtracts from the shunt flux, theseries
field can actuall reverse themagnetic polarit othemachine s
poles.
y Themotorwill t picall remain still or turn slowl in therong
direction while burning up because of the
excessivearmaturecurrent.
ence, when starting this t pe ofmotor, theseries fieldmust
be short-circuited, so that it behaves as an ordinar shunt
motor during the starting period
-
8/8/2019 Ch9 DC Motors
66/66
Speed control in the cumulativel compounded dcmotor
The techniques available for s eed control of a cumulativel
com ounded motor are the same as those availa le or a shunt
motor:
y Change the field resistance RFy Change the armature voltage
VAy Change the armature resistance RA
Theoreticall , the differentiall com ounded dc motor could
be
controlled in a similarmanner.
owever, since the differentiall com ounded motor is almost
never used, itss eed control method hardl matters.
The arguments des ribing
the effects of these
methods are ver similar
to the arguments given
earlier for the shunt motor