Embed Size (px)
DESCRIPTION
通信基础知识. Communications. 通信方式的几个要素 串行、并行( Serial/parallel ) 同步、异步( Synchronous/asynchronous ) 点对点、总线( Point-to-point/bus ) 半双工、全双工( Half-duplex/full-duplex ) 主从式、对等式( Master-slave/equal partners ) 单端信号、差分信号( Single-ended/differential ). 通信基础知识 —— 串行、并行. Communications -characteristics. - PowerPoint PPT Presentation
Citation preview

Lecture4 Page 1 微控制器开发技术
Communications
通信方式的几个要素
串行、并行( Serial/parallel )同步、异步( Synchronous/asynchronous )点对点、总线( Point-to-point/bus )半双工、全双工( Half-duplex/full-duplex )主从式、对等式( Master-slave/equal partners )单端信号、差分信号( Single-ended/differential )
通信基础知识

Lecture4 Page 2 微控制器开发技术
Communications -characteristics
串行通信 数据按位传输 通信方只需要很少的连接 – resource/pin efficient 速度较慢,传输信息少 传输距离较远
并行通信 数据按字节 / 字传输 通信方需要多个连接信号 -- difficult for PCB routing 传输速度快 传输距离较短
你接触过哪些串行 / 并行通信?
通信基础知识 —— 串行、并行

Lecture4 Page 3 微控制器开发技术
Communications -characteristics
同步通信接收方可以得到发送方的通信时钟信号传输速率高
异步通信发送方和接收方使用独立的时钟来处理通信信号通信双方约定通信速率通信中需要约定起始 / 停止位或定义特殊的帧结构传输速率较低
通信基础知识 —— 同步、异步

Lecture4 Page 4 微控制器开发技术
Communications -characteristics
点对点通信线路上只有两个通信方 不需要寻址
总线通信线路上有多个通信方需要建立寻址机制
通信基础知识 —— 拓扑结构

Lecture4 Page 5 微控制器开发技术
Communications -characteristics
半双工不能同时进行发送和接收一方发送时,其他通信方只能处于接收状态需要额外的逻辑来控制发送和接收状态的切换有发生冲突的危险
全双工通信端可以同时进行发送和接收需要两个独立的通信通道使用简单,数据传输率高
对讲机?电话机?
通信基础知识 —— 半双工、全双工

Lecture4 Page 6 微控制器开发技术
Communications -characteristics
主从式只有主端可以发起数据传输从端等待主端的允许才能传输数据
对等式任何节点可以发起数据传输需要建立冲突检测和仲裁机制
通信基础知识 —— 主从式、对等式

Lecture4 Page 7 微控制器开发技术
Communications -characteristics
单端信号信号幅度以地电平作为参考通信双方必须建立共同的参考地电平干扰造成的信号幅度变化可能导致错误解释
差分信号每个信号使用两根线传输,信号的值由两个线上的电
平的差值表示通信方不需要共同的参考地对干扰抑止能力强传输速率高
通信基础知识 —— 单端、差分信号

Lecture4 Page 8 微控制器开发技术
微控制器常见的通信类型
总线类型 线数 通信类型 多主 波特率( bps) 器件数目 总线长度UART 2 异步 No 3K-1M 2 *
SPI 3 同步 Yes 1M-10M <10 板内
I2C 2 同步 Yes ~1M <10 板内
CAN 2 异步 Yes 20K-1M 128 百米~公里
LIN 1 异步 No <20K 16 几十米

单片机原理及应用
Tsinghua Freescale Embedded System Center www.tsinghua-mot.net
by AlexGong [email protected]
10.2 同步串行外设接口 SPI

Lecture4 Page 10 微控制器开发技术
本节提要
一、 SPI 概述二、 SPI 模块功能三、 SPI 模块引脚四、 SPI 模块寄存器五、 SPI 模块编程范例

Lecture4 Page 11 微控制器开发技术
本节提要
一、 SPI 概述二、 SPI 模块功能三、 SPI 模块引脚四、 SPI 模块寄存器五、 SPI 模块编程范例

Lecture4 Page 12 微控制器开发技术
SPI 特性
可设置主机模式 / 从机模式 可选择 8 位或 16 位数据宽度 可选择全双工模式 ( 一个 ) 或单线双向模式 可灵活设置的时钟极性和相位 可选择从最高位或最低位开始传送 可编程的传送速率 可实现双缓存操作 与 LCD 驱动器 , D/A 转换器 , RTC,EEPROM 等
通信接口简单;

Lecture4 Page 13 微控制器开发技术
SPI 的数据流动

Lecture4 Page 14 微控制器开发技术
7 0 7 0MOSI
MISO
CPU 端IO 端
CPU 端IO 端
7 07 MOSI
MISO0
重复 8 次
SPI 工作原理

Lecture4 Page 15 微控制器开发技术
本节提要
一、 SPI 概述二、 SPI 模块功能三、 SPI 模块引脚四、 SPI 模块寄存器五、 SPI 模块编程范例

Lecture4 Page 16 微控制器开发技术
SPI 方框图SPI 时钟发生
器移位寄存器
控制寄存器

Lecture4 Page 17 微控制器开发技术
主机模式
控制整个数据传送通过定义 SS 选择通信从机确定 SCK 波特率,相位和极性切换 SCK 脉冲 驱动 MOSI 信号采样 MISO 信号
通过写入 SPIDR 触发传输过程

Lecture4 Page 18 微控制器开发技术
从机模式
响应传输仅当定义了相应的 SS 才被激活利用事先定义的相位和极性检测 SCK 跳变沿 驱动 MISO 信号采样 MOSI 信号

Lecture4 Page 19 微控制器开发技术
本节提要
一、 SPI 概述二、 SPI 模块功能三、 SPI 模块引脚四、 SPI 模块寄存器五、 SPI 模块编程范例

Lecture4 Page 20 微控制器开发技术
.
SPI 引脚 1 —— 串行数据引脚
MOSI — Master Out/Slave In Pin
MISO — Master In/Slave Out Pin
SPI 置为主机模式: MISO – 数据输入线 MOSI – 数据输出线
SPI 置为从机模式: MISO – 数据输出线 MOSI – 数据输入线
作用:发送和接收串行数据

Lecture4 Page 21 微控制器开发技术
.
SPI 引脚 2 —— 串行时钟
SCK — Serial Clock Pin
主机模式下, SCK 信号来源于内部 MCU 总线时钟
同步信号,对 MOSI 和 MISO 引脚传输的串行输入、输出数据进行同步
主机和从机在 SCK 信号的跳变沿进行移位和采样数据
SCK 的时钟频率由 SPI0BR 选择 主机和从机遵守相同时序模式

Lecture4 Page 22 微控制器开发技术
SPI 信号 – SCK 极性 & 相位
SCK 奇数跳变沿驱动,偶数跳变沿采样

Lecture4 Page 23 微控制器开发技术
SPI 信号 – SCK 极性 & 相位 ( 续 )
SCK 偶数跳变沿驱动,奇数跳变沿采样

Lecture4 Page 24 微控制器开发技术
.
SPI 引脚 3 —— 外设片选
SS — Slave Select Pin
主机模式: SS 信号上拉到高电平
主机和从机对 SS 引脚使用不同
从机模式: SS 信号为低电平

Lecture4 Page 25 微控制器开发技术
本节提要
一、 SPI 概述二、 SPI 模块功能三、 SPI 模块引脚四、 SPI 模块寄存器五、 SPI 模块编程范例

Lecture4 Page 26 微控制器开发技术
SPI 寄存器 1/4
SPICR1 - SPI 控制寄存器 1
1 = SPI Interrupt Enabled0 = SPI Interrupt Disabled
1 = SPI SYSTEM Enabled0 = SPI SYSTEM Disabled
1 = SPI IS MASTER0 = SPI IS SLAVE
DDRS7 SSOE MASTER MODE SLAVE MODE
0 0 SS INPUT SS INPUT (MODF Enabled) 0 1 GP INPUT SS INPUT 1 0 GP OUTPUT SS INPUT 1 1 SS OUTPUT SS INPUT
1 = SPI LSB FIRST 0 = SPI MSB FIRST
1 = SPI Transmit Interrupt Enable0 = SPI Transmit Interrupt Disabled
SPICR2 - SPI 控制寄存器 2
SPISWAI = SPI Stop in Wait Mode 1 = HALT SSI CLOCK WHEN CPU IN WAIT MODE
MODFEN - Mode Fault Enable 0 = Mode Fault Disabled 1 = Mode Fault Enabled
BIDIROE - Output Enable in Bidirectional mode 0 = Output Buffer Disabled 1 = Output Buffer Enabled

Lecture4 Page 27 微控制器开发技术
练习: 20M 总线时钟, 最大 SPI 波特率 = ? 最小 SPI 波特率 = ?
SPI 寄存器 2/4

Lecture4 Page 28 微控制器开发技术
SPI 寄存器 3/4
SPISR - SPI 状态寄存器
SPRF - SPI 接收中断标志 1 = New is received into SPIDR
SPTEF - SPI 发送缓存空中断标志 MODF – 主机模式错误标志 1 = SPI Data Register is Empty 1 = SPI Master was selected as Slave

Lecture4 Page 29 微控制器开发技术
SPI 寄存器 4/4
SPI Data Register(SPIDR = SPIDRH:SPIDRL) - SPI 数据寄存器
注 : 用户仅当 SPI 发送缓冲空标志置位时才能写入该寄存器 .
注 : 发送数据与接收数据使用相同寄存器

Lecture4 Page 30 微控制器开发技术
本节提要
一、 SPI 概述二、 SPI 模块功能三、 SPI 模块引脚四、 SPI 模块寄存器五、 SPI 模块编程范例

Lecture4 Page 31 微控制器开发技术
SPI 模块编程范例
SPI 模块编程方法① SPI初始化:先写 SPI0BR ,设定 SPI 波特率;再写
控制寄存器 SPI0CR1 和 SPI0CR2 ,设定时钟的极性、相位、 SPI 数据传输宽度、 SPI 工作模式、中断允许位,并使能 SPI 模块
② SPI 收发数据:通过查询 SPI0SR 中的状态位或采用中断方式,读写数据寄存器,完成数据收发。

Lecture4 Page 32 微控制器开发技术
SPI 模块编程范例 ( 续 1)
SPI 模块编程范例
1. SPI初始化//SPI初始化函数void SPI_Init()
{
SPI0BR=0x44; // 设定波特率 SPI0CR1=0x5C; //关闭 SPI 中断,置 SPI 主机模式,使能 SPI 模块 SPI0CR2=0x00; // 数据传输宽度为 8 位,即一个字节 }

Lecture4 Page 33 微控制器开发技术
SPI 模块编程范例 ( 续 2)
//SPI 发送一个字节的函数// 参数: send_data 为待发送的 1字节数据void SPI_send_char(unsigned char send_data)
{
while((SPI0SR&0x20)==0);
SPI0DRL=send_data;
}
//SPI 接收一个字节的函数//返回:接收的 1字节数据unsigned char SPI_rev_char(void)
{
while((SPI0SR&0x80)==0);
return SPI0DRL;
}
2. SPI 收发数据

Lecture4 Page 34 微控制器开发技术
SPI 驱动数码管显示的典型应用
硬件连接:教材 P80 : 1.MCU 的 MOSI( 17)接 164 的 A 脚( 1) 2.MCU 的 SCK( 18)接 164 的 CLK 脚( 8) 3.164 的 B( 2)和 /MR( 9)接 +5V 4.164 的 Q0~Q7 ,接数码管的 a~DP板上 12、 11、 10、 9、 8、 7、 6、 5、 4、 3、 2、
1 1 位、 a 、 f 、 2、 3、 b、 4、 g、 c、 DP、 d、
e

Lecture4 Page 35 微控制器开发技术
74LS164 原理
符号 引脚 说明
DSA 1 数据输入
DSB 2 数据输入
Q0~Q3
3~6 输出
GND 7 地 (0 V)
CP 8时钟输入(低电平到高电平边沿触
发)
/M/R 9 中央复位输入(低电平有效)
Q4~Q7
10~13
输出
VCC 14 正电源

Lecture4 Page 36 微控制器开发技术
SPI 驱动数码管显示的典型应用
软件: 见 3-SPI练习程序

异步串行通信( SCI )通信基础知识异步串行通信协议 RS-232 标准SCI 功能简介SCI 寄存器SCI 软件开发方法SCI 应用程序示例

SCI

EIA RS-232-C美国电子工业协会正式公布的异步串行通信标准,也是目前最常用的异步串行通信标准,用来实现计算机与计算机之间、计算机与外设之间的数据通信
RS-232-C 电平采用负逻辑,即,逻辑 1 : -3~ -25V, 逻辑 0 : +3~ +25V (需要电平转换)
RS-232-C 接口标准有 22 根线,采用标准 25芯 D 型插头座; PC 上使用简化的 9芯 D 型插座
多种通信应答(握手)方式: 硬件握手,自应答, XON/XOFF 模式
波特率: 300bps ~ 4Mbps , 物理层有多种实现方式(铜缆,光缆,红外,无线,微波)
起始位 / 停止位 / 数据位 /奇偶校验 / 全双工半双工模式
广泛应用: Modem , 20mA 电流环, RS485 个人计算机都有标准的 RS232 接口,驱动程序,超级终端
RS232 standard

RS232 standard

简化的 9芯 D 型接头信号定义(硬件流量控制) DTE DCE
3 TxD out TxD Transmit Data2 RxD in RxD Receive Data5 GND GND
7 RTS out RTS Require To Send8 CTS in CTS Clear To Send6 DSR in DSR Data Set Ready9 DCD in DCD Data Care Detected4 DTR out DTR Data Terminal Ready
RS232 standard

简化的 9芯 D 型接头信号定义(自应答方式)
DTE / DCE
2 TxD out TxD (Transmit Data )
3 RxD in RxD (Receive Data)
7 GND GND (Ground)
4 RTS out RTS (Require to Send)
5 CTS in CTS (Clear to Send)
6 DSR in DSR (Data Terminal Ready)
8 DCD in DCD (Data Carry Detected)
20 DTR out DTR (Data Set Ready)
Ready always, or XON/XOFF protocol, ASCII only!
RS232 standard

简化的 9芯 D 型接头信号定义(无应答方式)
1 protection ground
2 RxD in RxD (Receive Data)
3 TxD out TxD (Transmit Data )
5 GND GND (Ground)
6 DSR in DSR (Data Terminal Ready)
7 RTS out RTS (Require to Send)
8 CTS in CTS (Clear to Send)
9 DCD in DCD (Data Carrier Detected)
4 DTR out DTR (Data Set Ready)
No Handshake, should use XON/XOFF protocol,ASCII only
RS232 standard

RS232 standard
TTL level vs. RS232 level

RS232 standard
TTL level vs. RS232 level

RS232 standard
RS232标准( 1962)出现的比 TTL( 1964)还早
需要接口转换芯片
MAX232 MicrocontrollerDB
9
TTL/CMOS
RS232

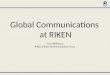
Frame format
0 1 2 3 4 5 6 7 8
LSB MSB stop idleidle start
UART
NRZ (not return zero) encoding Several configurable parameters
Baud rate, #data bits, parity, #stop bits Nomenclature: 9600,N81 LSB- Least significant bit MSB- Most significant bit
Parity (stop)

Start/stop 位
接受端需要明确数据帧的边界,即该帧从什么时候开始,什么时候结束。
数据位传送之前,都要发送 START 位 (always ‘0’) ( 从空闲状态开始的下降沿,是 START 位的开始)
在数据位传送结束后,还要传送 STOP 位 (always ‘1’).

数据位识别
接受端在其时钟上升沿采样数据线电平,以识别数据位的高低状态。
What is the data transmitted above?

数据位识别
Tx_clk
Rx_clk
TxD
RxD
传输过程会引起信号的延迟,会引入外部干扰导致的噪声及毛刺

SCI(UART)-oversampling
- 通信双方有约定的通信速率(波特率)- 接受端按照 16 倍波特率的频率对信号进行 "over samples"
- 使用其中 3 个采样结果,通过 3 取 2 的机制确定实际的信号电平状态- 如果 3 个采样结果不一致, noise 标志会置起- 接受端在总线进入空闲状态后,通过监测下降沿,启动对起始位的判断,从而开始整个数据帧的接受。

SCI(UART)-oversampling

SCI- 波特率
波特率: bits per second
Question1: 按照 9600,N81 的通信参数,每秒可以传送多少个字节?Hints: don’t forget the start/stop bits.
Question2: 对于一个总线频率为 16MHz的微控制器,其 SCI 最高支持的波特率是多少?

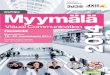
波特率误差容限
接受端必须能正确的识别整个数据帧,从起始位到停止位
0/1 0/1 0/1 0/1 0/1 0/1 0/1 10/101 1
16*(1+8) +9
9Ttx < (153/16)Trx <10Ttx
clock difference tolerance~5%
10
9 Transmitter
Receiver

校验位
校验位附加在数据帧末尾,用于检查传输过程中是否发生了数据位错误。
LSB MSB stopstart Parity

Parity bit
偶校验 -- 所有数据位和校验位中, 1 的数目是偶数
奇校验 --所有数据位和校验位中, 1 的数目是奇数
Example:
what is the even parity for “10011100”
what is the odd parity for “01010110”

SCI 可能产生的事件
- Tx Empty (IRQ)
- Tx Complete (IRQ)
- Rx Full (IRQ)
- Idle (IRQ)
- Rx Overrun (IRQ)
- Noise Error
- Framing Error
- Parity Error

SCI 故障
Framing Error: 在数据帧结尾没有收到正确的停止位
Receiver overrun: 下一个数据到达时,上一个数据还没有被处理
Parity Error: 接受的校验和与协议规定的不匹配 .

So, are we clear about UART?
Let’s play a game!I need one volunteer
This volunteer will be a UART sender, all your students will be UART receivers.
LSB firstProtocol is 1,N81 (1bit per second)Hand-raise is ‘1’, hand-down is ‘0’

Transmitter: Receiver:
.
TDR BUFFER
SHIFT REGISTER
DATA IN
DATAOUT
T8PARITY
GEN.
DATA OUT
RDR BUFFER
SHIFT REGISTERDATAIN
R8
PARITYCHECK
SCI – 双缓冲寄存结构
发送和接受都具有双缓冲结构 CPU 不能读写移位缓冲寄存器CPU 仅能访问数据寄存器

.
SCI – 缓冲结构
发送时,数据自动从数据寄存器转移到移位寄存器 接受时,数据自动从移位寄存器转移到数据寄存器 发送和接受的数据寄存器使用相同的寄存器地址 读写该寄存器地址具有不同的含义 !
Question: what’s the function of the instructions below while(1){ asm LDAA SCI0DR asm STAA SCI0DR }

Transmitter block diagramTx data regist
er
Tx clock genNote the ÷16
Shift register
Parity gen
Control logic
Interrupt request gen

Receiver block diagramRx data register
shift register
Rx clock gen
Control logic

SCI(UART)

SCIBH/L - SCI Baud Rate Control Register
必须连续写入 BDH 和 BDL 寄存器,仅仅写入 BDH没有作用。
Bus clock 1 ~ 8191
24M bus clockExercise1: 9600bps wanted , BR = ? BDH = ? BDL = ?Exercise2 : the maximum baud rate = ?
SCI Registers 1/5

SCCR1 - SCI Control Register 1Address Offset $0002
1 = 9-BIT DATA 0 = 8-BIT DATA
1 = IDLE LINE WAKE-UP 0 = ADDRESS MARK WAKE-UP
1 = NORMAL IDLE TIME 0 = SHORT IDLE TIME
1 = EVEN PARITY0 = ODD PARITY
1 = PARITY Enabled0 = PARITY Disabled
SCISWAI - SCI Stop in Wait mode 0 = Normal operation 1 = SCI Disabled in Wait mode
SCI Registers 2/5

SCICR 2 - SCI Control Register 2
ILIE - Idle Line Interrupt Enable1 = IDLE IRQ Enabled0 = IDLE IRQ Disabled
TE _ Transmitter Enable 1 = Transmitter Enabled0 = Transmitter Disabled
RE Receiver Enable1 = Receiver Enabled0 = Receiver Disabled
SBK - Send Break1 = Send Break0 = Terminate Break
RWU - Receiver Wake-up 1 = Enter Receiver Wake-UP 0 = Exit Receiver Wake-UP
TCIE - Transmit Complete Interrupt Enable1 = Transmitter Complete IRQ Enabled0 = Transmitter Complete IRQ Disabled
RIE - Receiver Interrupt Enable1 = Receiver IRQ Enabled0 = Receiver IRQ Disabled
TIE - Transmitter Interrupt Enable1 = Transmitter IRQ Enabled0 = Transmitter IRQ Disabled
SCI Registers 3/5

SCISR 1 - SCI Status Register 1
SCI Registers 4/5
SCISR 2 - SCI Status Register 2
RAF - Receiver Active Status 1 = Receiver Active 0 = Receiver not Active
BRK13 - Break Transmit Character Length 0 = Break Char is 10 or 11 bits long 1 = Break Char is 13 or 14 bit long
TXDIR - Transmitter pin direction 0 = TxD pin is input in Single-Wire mode 1 = TxD pin is output in Single-Wire mode
RDRF: Receive data Register FullTC : Transmit CompleteTDRE: Transmit data register empty

SCIDRH/L - SCI Data Register High/Low
Note: R8 and T8 are used when 9-bit char is required
SCI Registers 5/5
Notice: same register for both transmit data and receive data

SCI programming
Put_Char BRCLR SCI0SR1,#$80,* STAB SCI0DRLRTS
void Put_Char(char c){ while ( (SCI0SR1 & 0x80) == 0);
SCI0DRL = c; }

Get_Char BRCLR SCI0SR1,$20,*LDAB SCI0DRL
RTS
char Get_Char(void);{ while ((SCI0SR1 & 0x20) == 0);
return(SCI0DRL); }
SCI programming