Embed Size (px)
DESCRIPTION
tai lieu
Citation preview
1. Giới thiệu về đối tượng.
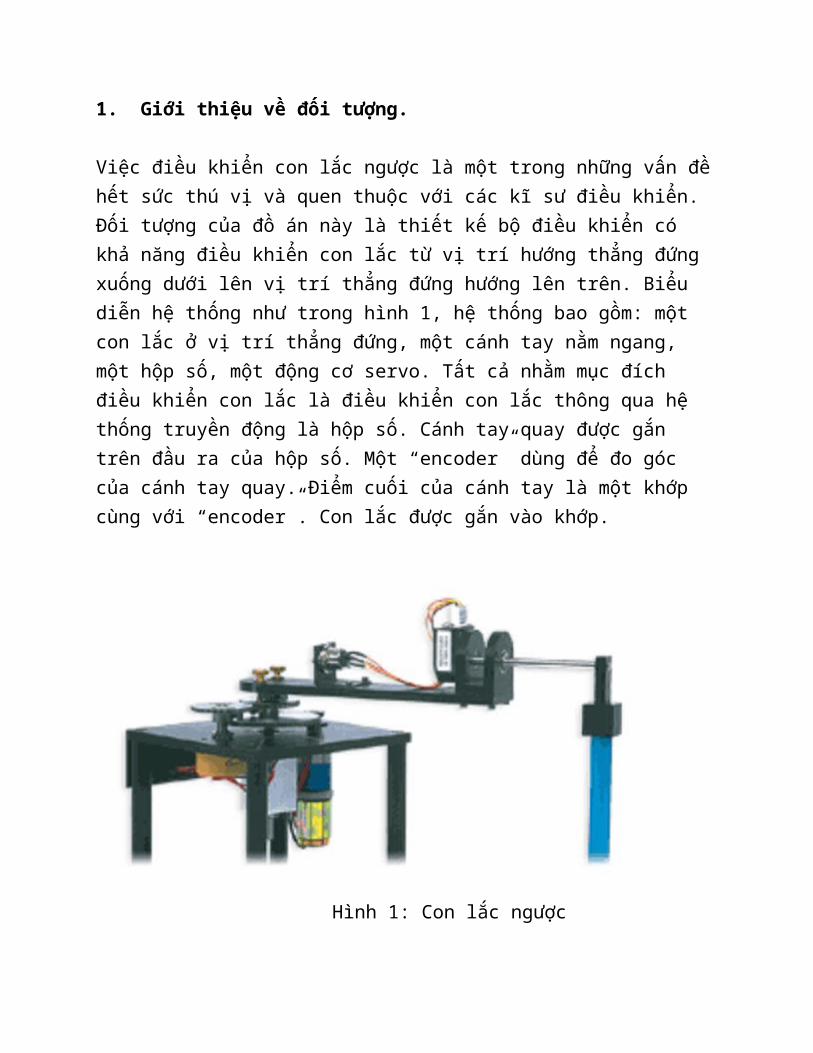
Việc điều khiển con lắc ngược là một trong những vấn đề hết sức thú vị và quen thuộc với các kĩ sư điều khiển. Đối tượng của đồ án này là thiết kế bộ điều khiển có khả năng điều khiển con lắc từ vị trí hướng thẳng đứng xuống dưới lên vị trí thẳng đứng hướng lên trên. Biểu diễn hệ thống như trong hình 1, hệ thống bao gồm: một con lắc ở vị trí thẳng đứng, một cánh tay nằm ngang, một hộp số, một động cơ servo. Tất cả nhằm mục đích điều khiển con lắc là điều khiển con lắc thông qua hệ thống truyền động là hộp số. Cánh tay quay được gắn trên đầu ra của hộp số. Một “encoder” dùng để đo góc của cánh tay quay. Điểm cuối của cánh tay là một khớp cùng với “encoder”. Con lắc được gắn vào khớp.
Hình 1: Con lắc ngược
1.1. Ứng dụng của đối tượng trong thực tế.
Con lắc ngược có rất nhiều ứng dụng trong thực tế, đặc biệt là một số ứng dụng
trong công nghiệp và quân sự. Một trong những ứng dụng có thể dễ dàng nhận
thấy của con lắc ngược trong công nghiệp là: điều khiển cân bằng cần trục khi di
chuyển vật nặng, chế tạo robot đi bằng hai chân mà nền tảng là xe tự cân bằng.
Trong quân sự là điều khiển góc lệch của tên lửa khi rời bệ phóng...
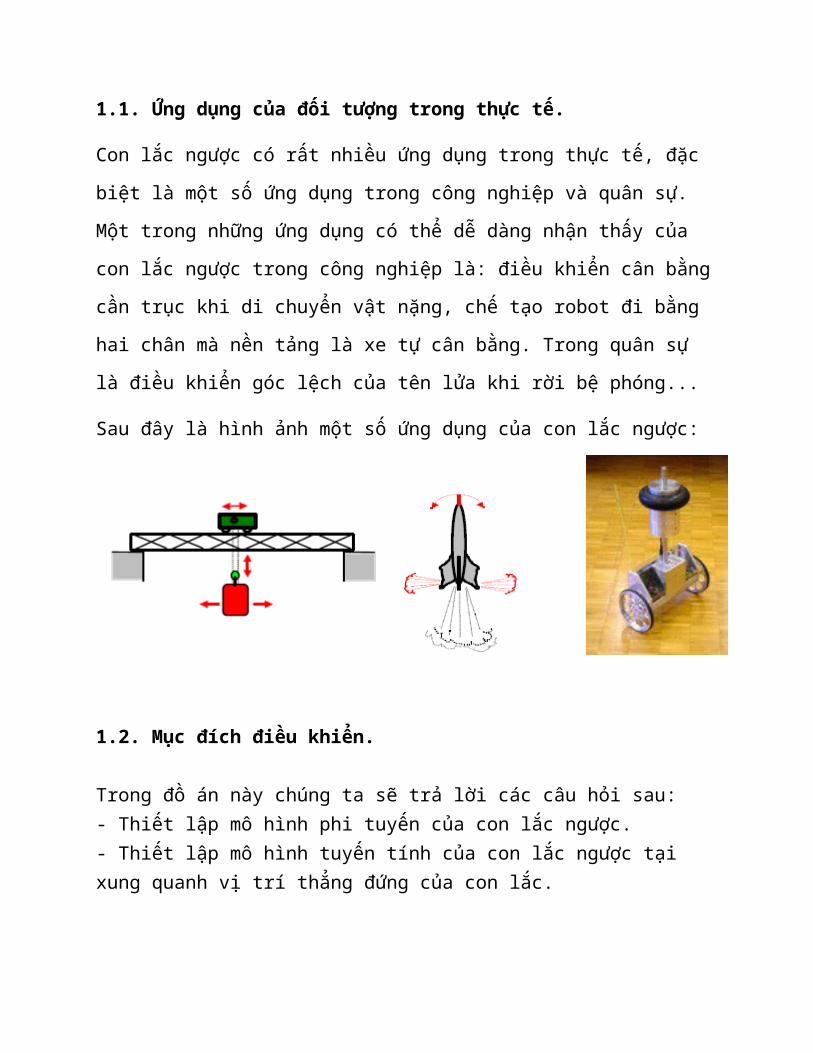
Sau đây là hình ảnh một số ứng dụng của con lắc ngược:
1.2. Mục đích điều khiển.
Trong đồ án này chúng ta sẽ trả lời các câu hỏi sau:- Thiết lập mô hình phi tuyến của con lắc ngược.- Thiết lập mô hình tuyến tính của con lắc ngược tại xung quanh vị trí thẳng đứng của con lắc. - Kiểm tra lại 2 mô hình tuyến tính và phi tuyến để xem nó có đáp ứng được mô hình thực của hệ thống trong một phạm vi hoạt động nào đó. - Thiết kế, thực thi và mô phỏng bộ điều khiển làm hệ ổn định với phần chính là con lắc ngược ở vị trí hướng thẳng đứng lên trên, làm hệ bền vững với các nhiễu nhỏ tác động vào con lắc.
2. Mô hình hóa con lắc ngược.
Việc thiết lập mô hình của con lắc ngược được dựa trên tài liệu [1].Con lắc ngược (chỉ gồm phần cơ khí) được minh họa như trong hình 2, và được sử dụng là các hệ tọa độ suy rộng, dùng để mô tả hệ thống con lắc ngược. Con lắc rời đi một góc trong khi cánh tay quay được một góc .
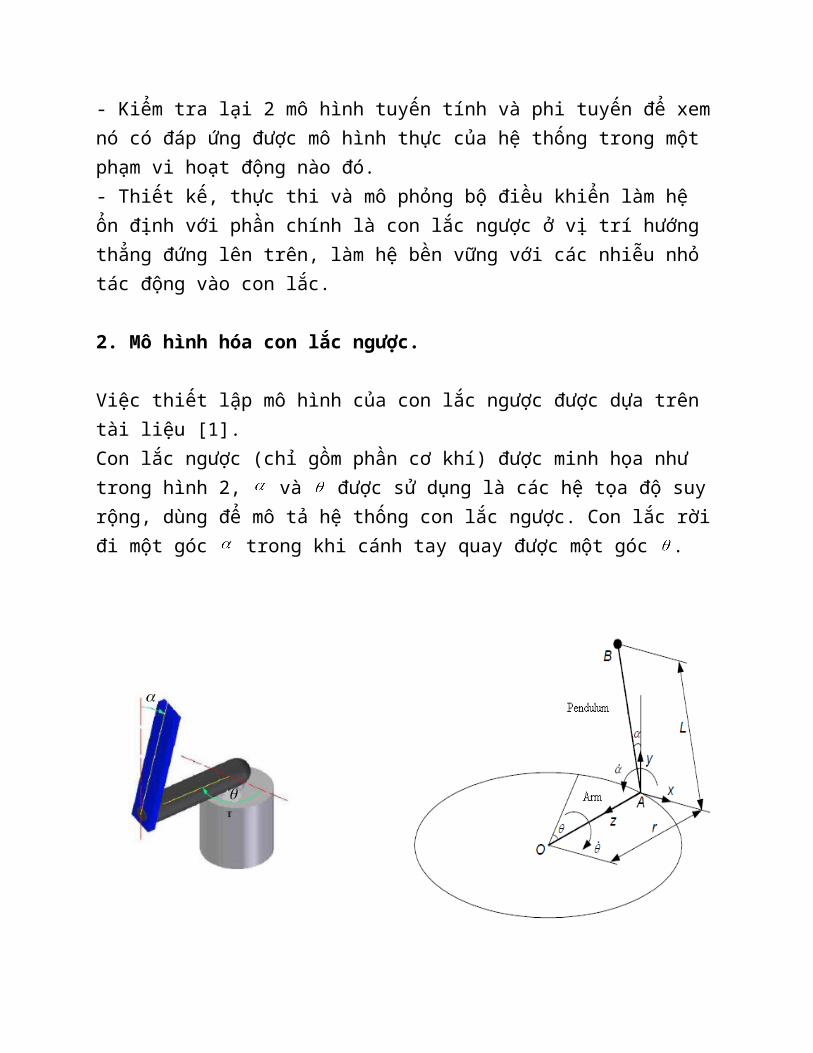
Hình 2:Mô hình đơn giản con lắc ngược quay
Hệ thống con lắc ngược quay bao gồm một con lắc có khối lượng m,chiều dài L có
thể quay tự do, góc của con lắc so với phương thẳng là , con lắc này được gắn
với một thanh nằm ngang có chiều dài r. Động cơ DC được dùng để di chuyển
thanh nằm ngang theo cả hai hướng thuận và ngược
Giả sử trọng lực của con lắc đặt tại điểm giữa B , như vậy điểm B sẽ thực hiện một
chuyển động quay so với điểm A với vận tốc :
(1)
Đồng thời với chuyển động quay quanh điểm A thì con lắc còn thực hiện chuyển
động quay quanh điểm O với vận tốc
Do vậy, vận tốc của điểm B so với điểm O cố định có thể được mô tả bởi phương
trình :
(2)
Lấy vi phân 2 vế các phương trình của hệ (2) ta được:
(3)
Hình 3: Phân tích các lực tác dụng.
Áp dụng định luật II Newton theo phương x và phương y ta được :
(4)
(5)
Áp dụng phương trình Euler cho chuyển động quay của con lắc quanh điểm B ta
được:

(6)
Phương trình chuyển động quay của cánh tay quanh điểm O :
(7)
Thay (4),(5) vào (6) ta được :
( ).
- . (8)
Thay (4) vào (7):
) . . = (9)
Với = = = ;
Thay vào (9) ta được :
) . . +…
) = (10)
Hệ phương trình mô tả đặc tính động phi tuyến của hệ thống:
. . + ] (10)

)( )
Với a= ; ; ) ;
; ;
Với góc nhỏ ( , ; ),tuyến tính hóa hệ (10) ta
được:
. + ] (11)
)( )
Lấy Laplace cả hai vế của mỗi phương trình hệ (11) ta được:
; (12)
Hàm truyền của mô hình tuyến tính :
=
Hệ phương trình biến trạng thái của mô hình tuyến tính có được bằng cách giải hệ
(10) với hai ẩn là và .

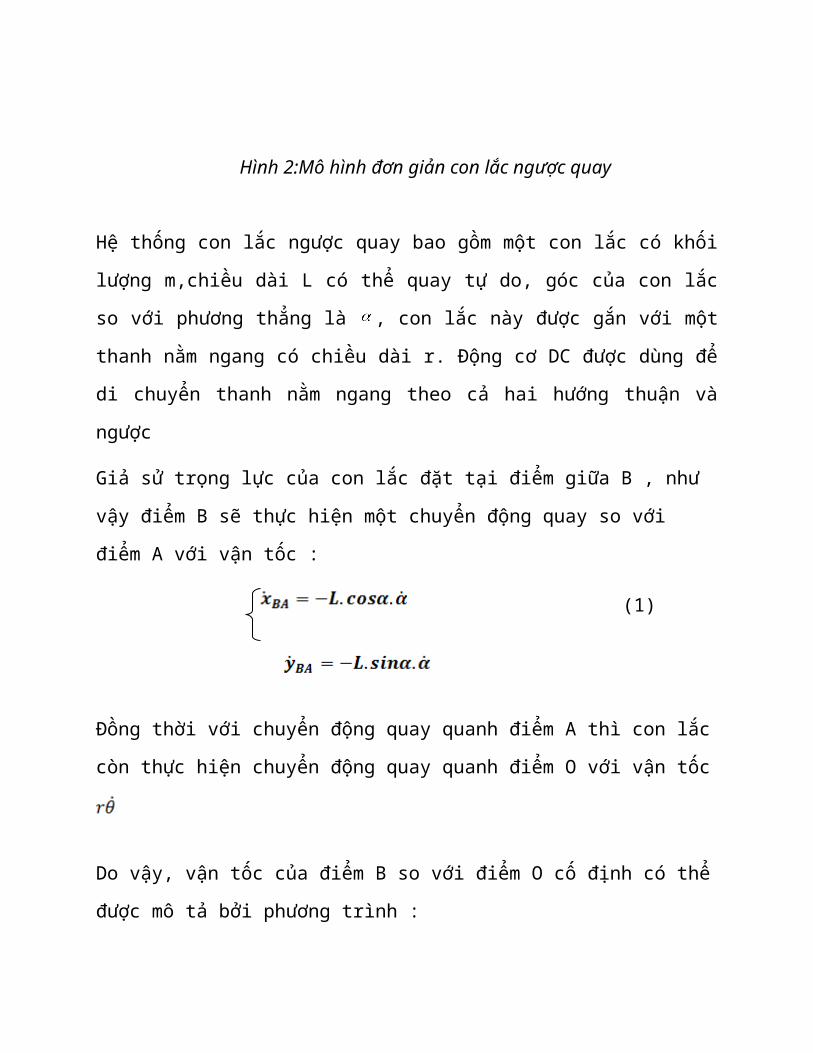
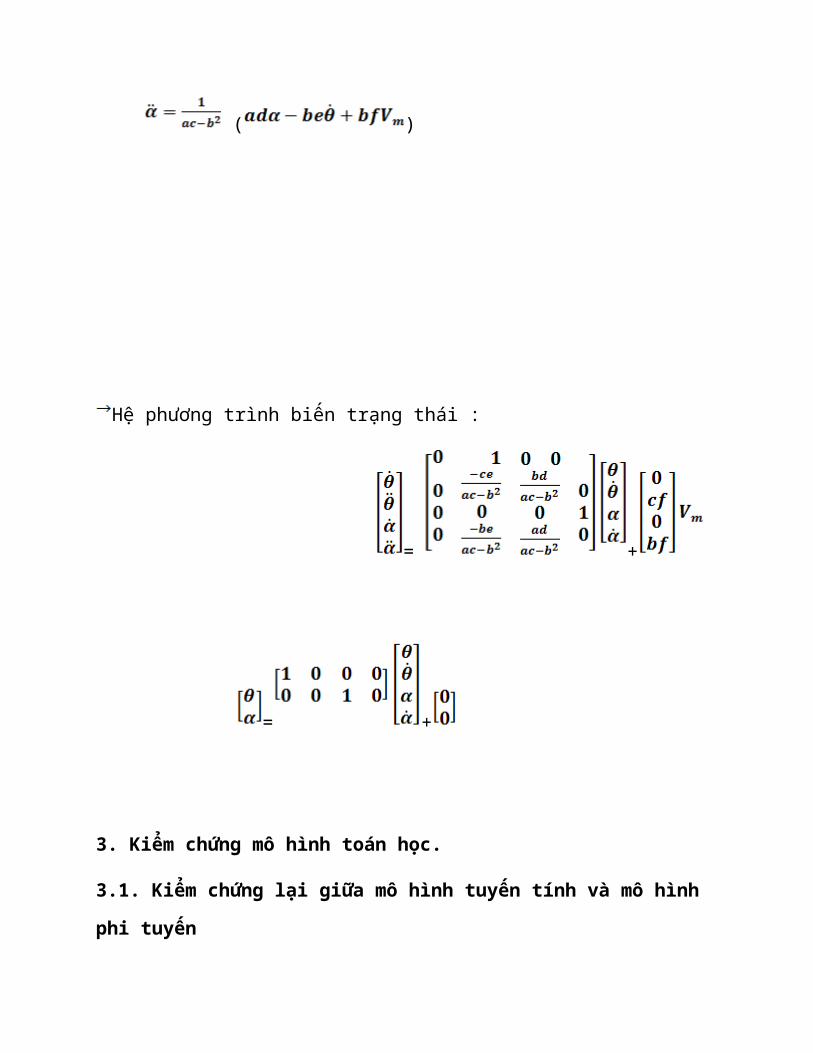
= ( )
( )
Hệ phương trình biến trạng thái :
= +
= +
3. Kiểm chứng mô hình toán học.
3.1. Kiểm chứng lại giữa mô hình tuyến tính và mô hình phi tuyến

Để có thể tìm hiểu về sự thay thế của mô hình tuyến tính cho mô hình phi tuyến
ban đầu. Chúng ta sẽ mô phỏng động học của cả hệ thống tuyến tính và phi tuyến
rồi so sánh mô phỏng đầu ra của chúng. Việc mô phỏng không chỉ dùng để kiểm
chứng mô hình tuyến tính mà nó còn cho chúng ta biết ngưỡng (ngưỡng của ) mà
hệ tuyến tính còn mô tả khá tốt đối tượng.
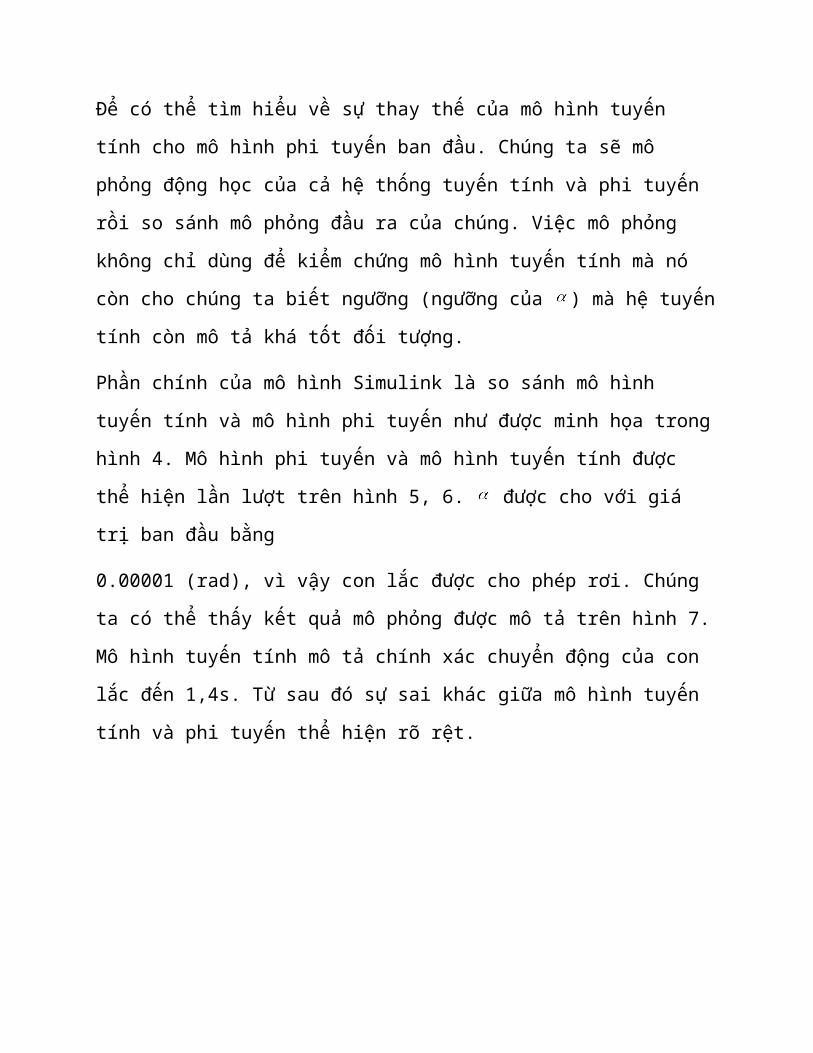
Phần chính của mô hình Simulink là so sánh mô hình tuyến tính và mô hình phi
tuyến như được minh họa trong hình 4. Mô hình phi tuyến và mô hình tuyến tính
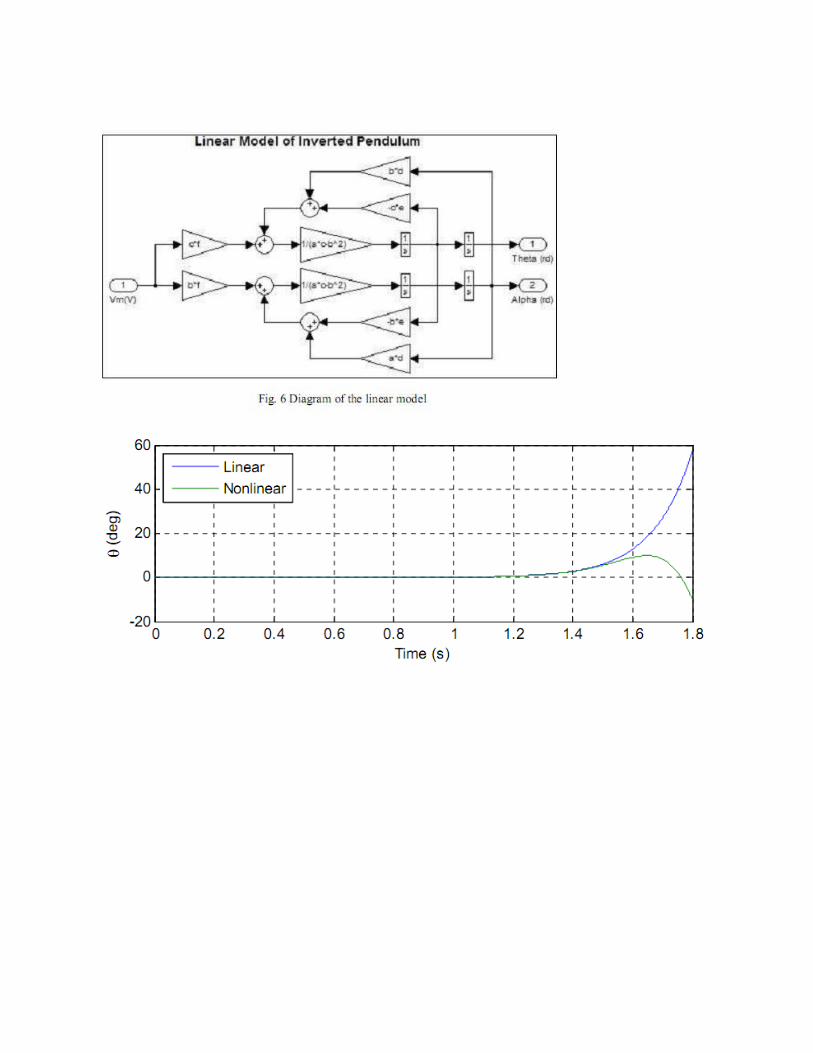
được thể hiện lần lượt trên hình 5, 6. được cho với giá trị ban đầu bằng
0.00001 (rad), vì vậy con lắc được cho phép rơi. Chúng ta có thể thấy kết quả mô
phỏng được mô tả trên hình 7. Mô hình tuyến tính mô tả chính xác chuyển động
của con lắc đến 1,4s. Từ sau đó sự sai khác giữa mô hình tuyến tính và phi tuyến
thể hiện rõ rệt.
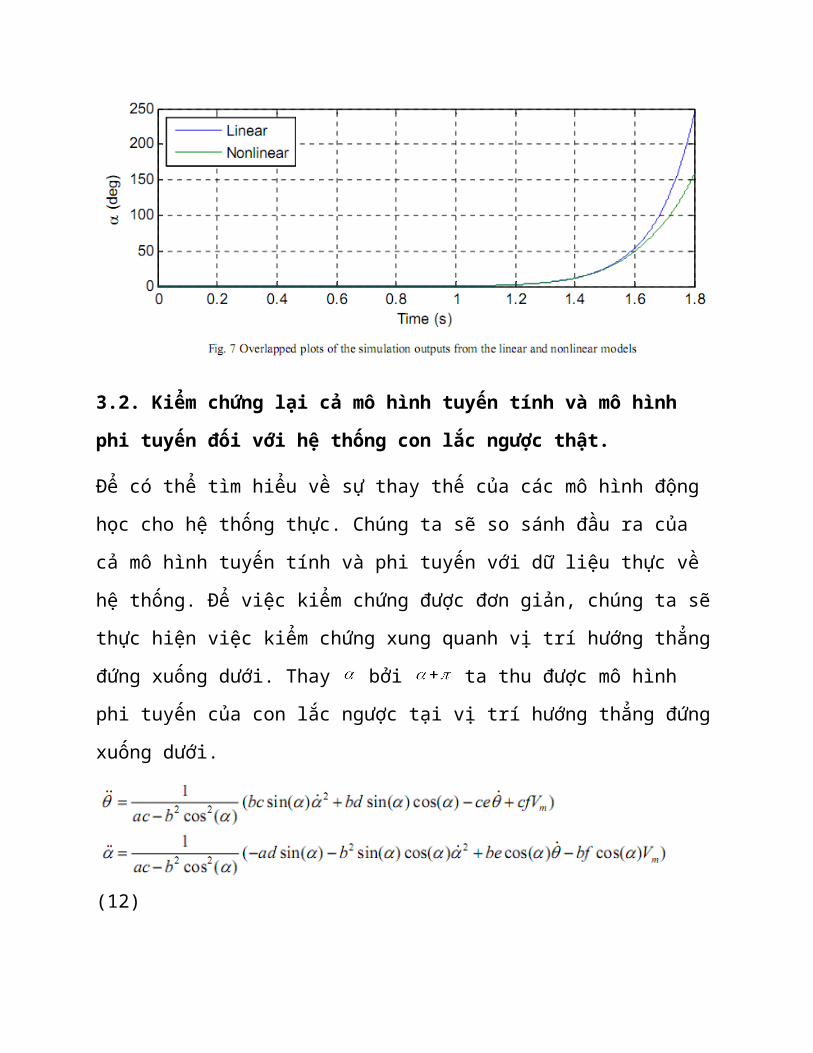
3.2. Kiểm chứng lại cả mô hình tuyến tính và mô hình phi tuyến đối với hệ
thống con lắc ngược thật.
Để có thể tìm hiểu về sự thay thế của các mô hình động học cho hệ thống thực.
Chúng ta sẽ so sánh đầu ra của cả mô hình tuyến tính và phi tuyến với dữ liệu thực
về hệ thống. Để việc kiểm chứng được đơn giản, chúng ta sẽ thực hiện việc kiểm
chứng xung quanh vị trí hướng thẳng đứng xuống dưới. Thay bởi ta thu
được mô hình phi tuyến của con lắc ngược tại vị trí hướng thẳng đứng xuống dưới.

(12)
Tuyến tính hóa phương trình (12) với giả thiết và ta thu được mô hình
tuyến tính như sau:
(13)
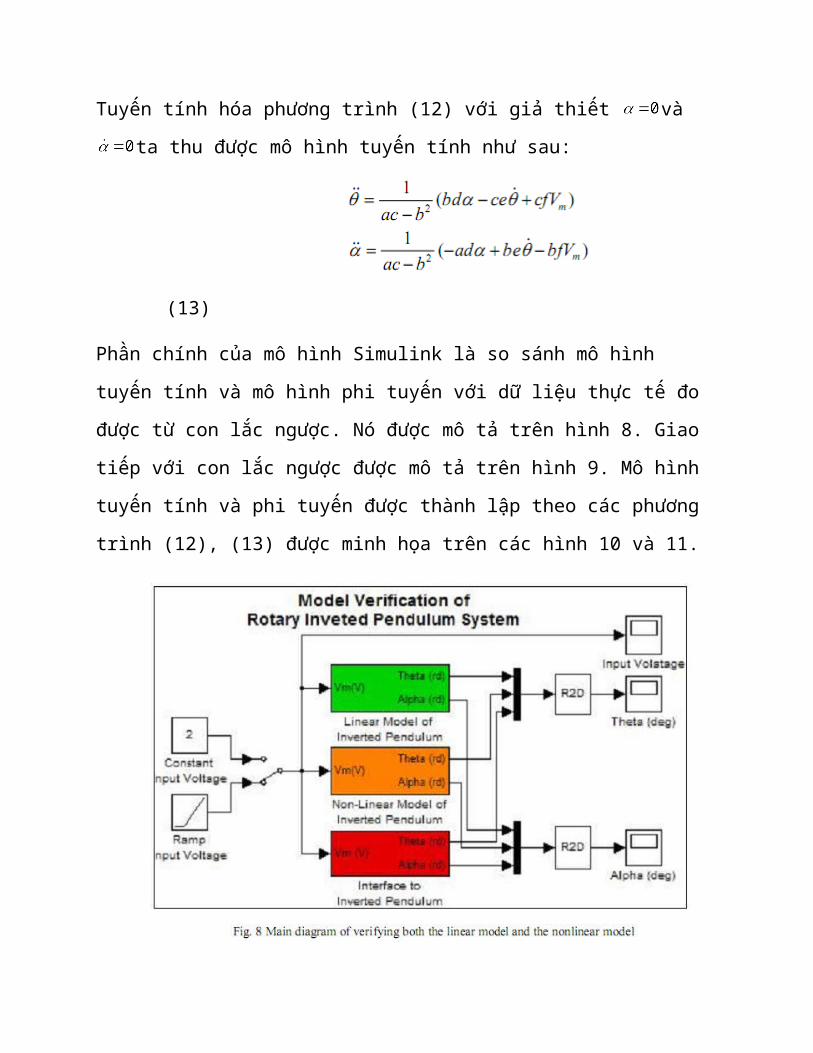
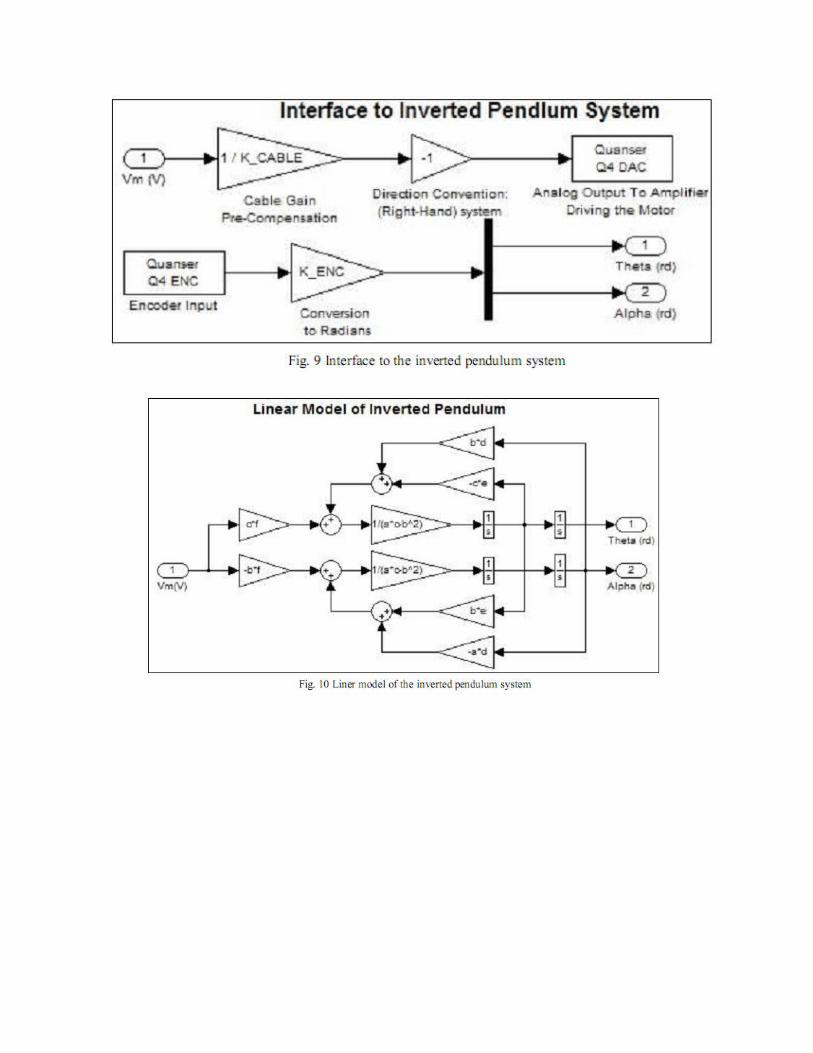
Phần chính của mô hình Simulink là so sánh mô hình tuyến tính và mô hình phi
tuyến với dữ liệu thực tế đo được từ con lắc ngược. Nó được mô tả trên hình 8.
Giao tiếp với con lắc ngược được mô tả trên hình 9. Mô hình tuyến tính và phi
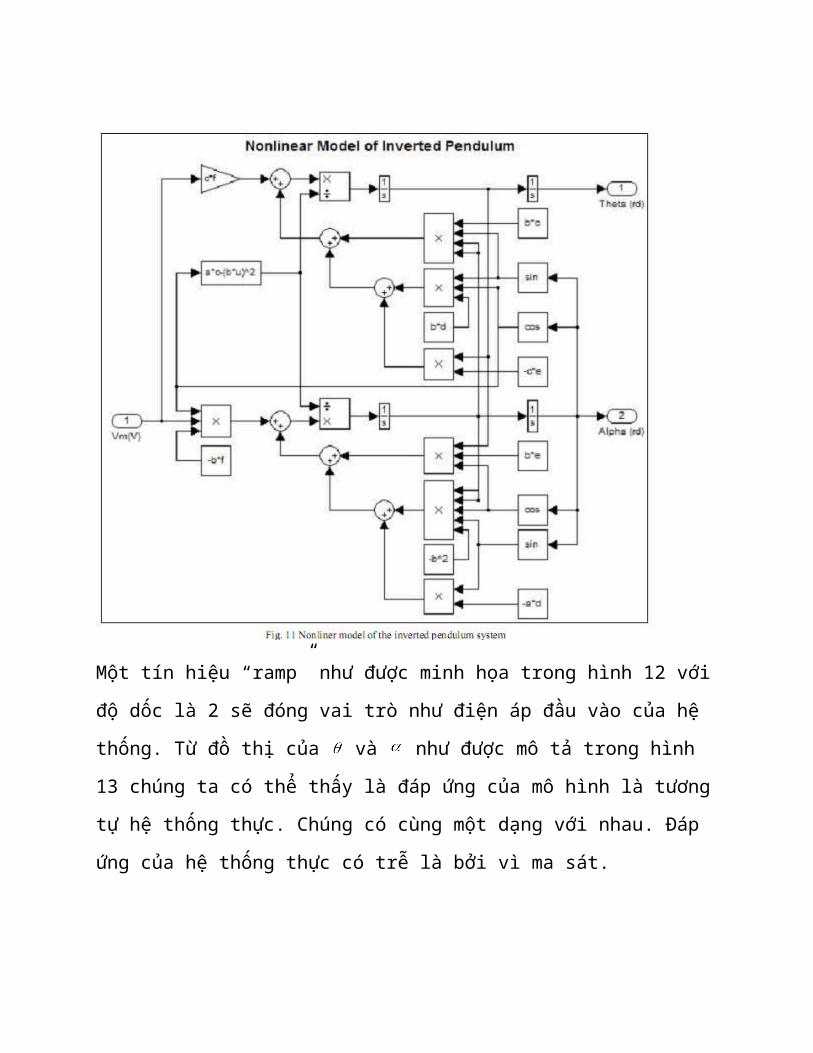
tuyến được thành lập theo các phương trình (12), (13) được minh họa trên các hình
10 và 11.
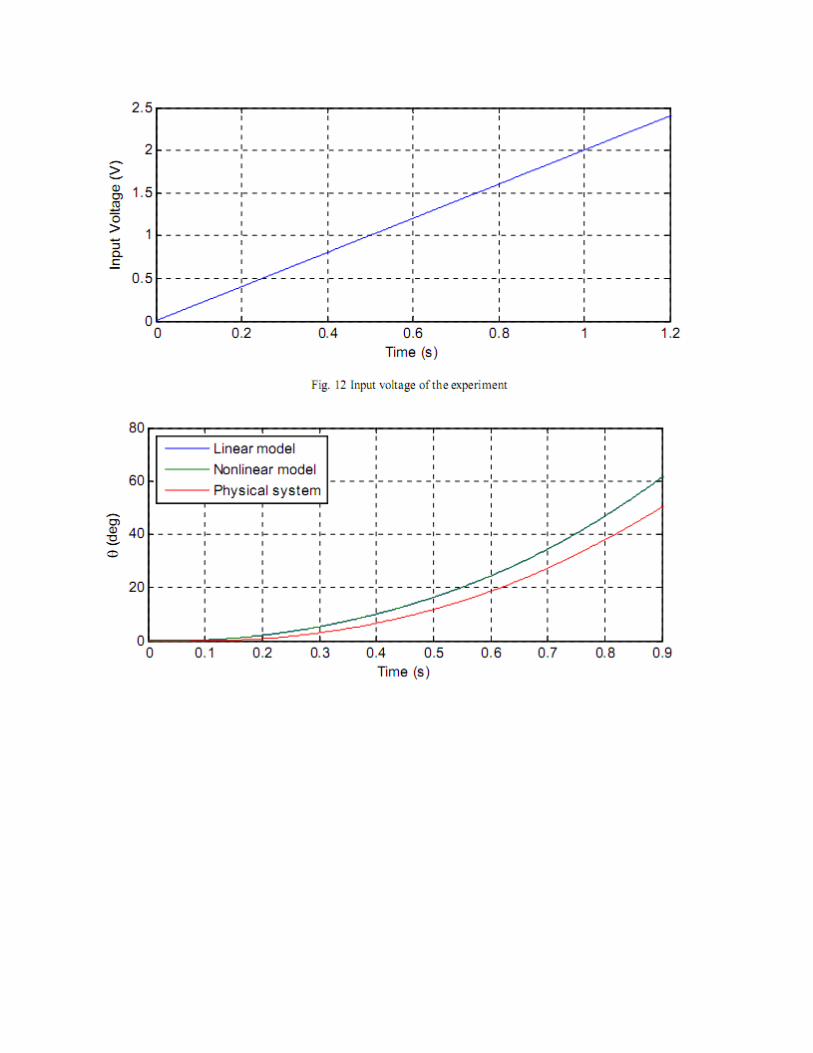
Một tín hiệu “ramp” như được minh họa trong hình 12 với độ dốc là 2 sẽ đóng vai
trò như điện áp đầu vào của hệ thống. Từ đồ thị của và như được mô tả trong
hình 13 chúng ta có thể thấy là đáp ứng của mô hình là tương tự hệ thống thực.
Chúng có cùng một dạng với nhau. Đáp ứng của hệ thống thực có trễ là bởi vì ma
sát.
4. Thiết kế bộ điều khiển.
Có rất nhiều phương pháp khác nhau được sử dụng để điều khiển hệ con lắc ngược
quay ( vd: LQR, Fuzzy Logic, Neural Network…), tuy nhiên với mục đích thiết kế
bộ điều khiển trên miền tần số, đồng thời bộ điều khiển PID cũng là bộ điều khiển
đơn giản và dễ thực hiện, chính vì vậy chúng em quyết định lựa chọn bộ điều khiển
PID để thực hiện điều khiển con lắc ngược.
4.1. Giới thiệu về bộ điều khiển PID.
Bộ điều khiển PID
- Các luật điều chỉnh P, PI, PD vàPID (gọi chung là PID) được sử dụng phổ biến nhất trong các hệ thống điều khiển quá trình - Cấu trúc và nguyên lý hoạt động đơn giản, dễhiểu và dễ sử dụng đối với những người làm thực tế - Có rất nhiều phương pháp và công cụ mạnh hỗ trợ chỉnh định các tham số của bộ điều chỉnh - Thuật toán PID thích hợp cho một phần lớn các quá trình công nghiệp.
1.Luật điều chỉnh tỉ lệ(P).
- Đơn giản, tác động nhanh. - Khó tránh khỏi sai lệch tĩnh với đối tượng không có đặc tính tích phân. - Phù hợp nhất với các đối tượng quán tính-tích phân.
2. Luật điều chỉnh tỉ lệ-tích phân (PI)
Sử dụng phổ biến nhất (> 90%) trong các bộ PID - Tác động tích phân (thanh phần I) giúp triệt tiêu sai lệch tĩnh khi giá trị đặt thay đổi dạng bậc thang
2. Luật điều chỉnh tỉ lệ-tích phân (PI)
Sử dụng phổ biến nhất (> 90%) trong các bộ PID
- Tác động tích phân (thanh phần I) giúp triệt tiêu sai lệch tĩnh khi giá trị đặt thay đổi dạng bậc thang - Thành phần tích phân làm xấu đi đặc tính động học của hệ thống: tác động chậm , dễ dao động hơn và dễ mất ổn định hơn - Phù hợp nhất với các đối tượng quán tính
Đặc tính tần số của khâu PI
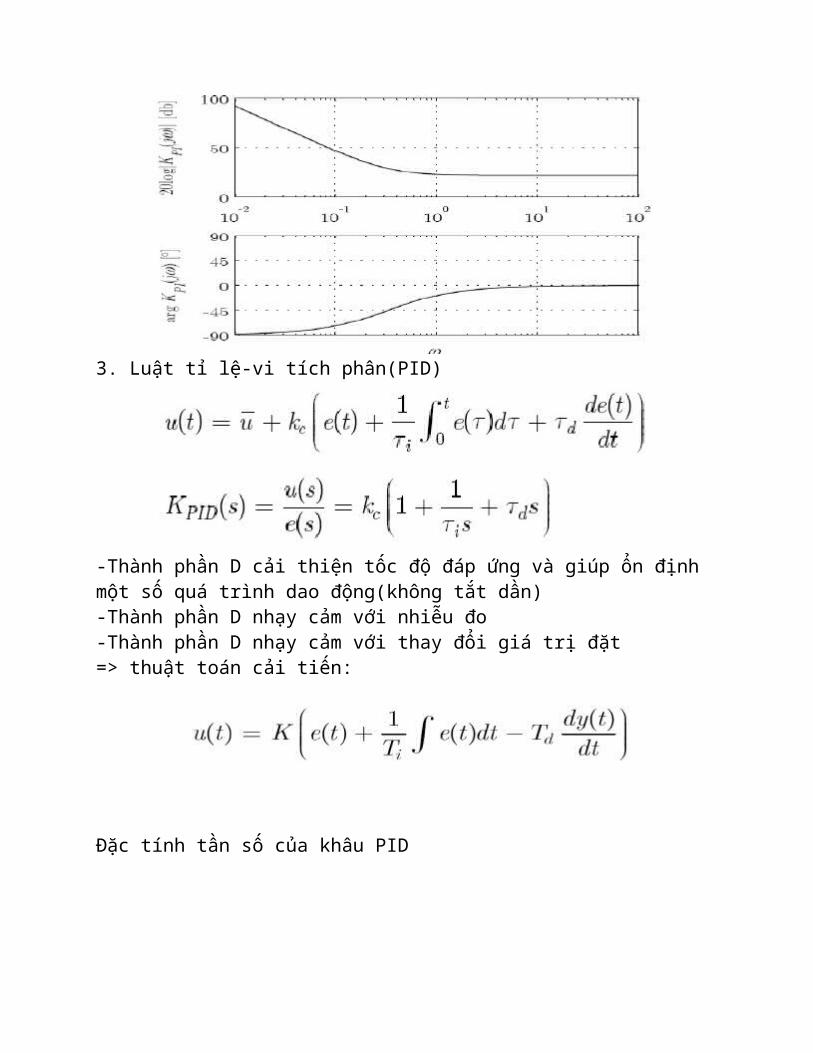
3. Luật tỉ lệ-vi tích phân(PID)
-Thành phần D cải thiện tốc độ đáp ứng và giúp ổn định một số quá trình dao động(không tắt dần)-Thành phần D nhạy cảm với nhiễu đo-Thành phần D nhạy cảm với thay đổi giá trị đặt=> thuật toán cải tiến:

Đặc tính tần số của khâu PID
4.Ba dạng biểu diễn của luật PID-Dạng chuẩn
-Dạng song song

-Dạng nối tiếp
5.Hiện tượng bão hòa tích phân (reset winup).
Hiện tượng đầu ra của bộ lieu chỉnh vẫn tiếp tục tăng quá mức giới hạn khi sai lệch điều khiển đã trở về không.-Windup có thể xảy ra khi:* Bộ điều khiển có chứa thành phần tích phân và*Tin hiệu điều khiển bị hạn chế
Các biện pháp khắc phục(Antiwindup):
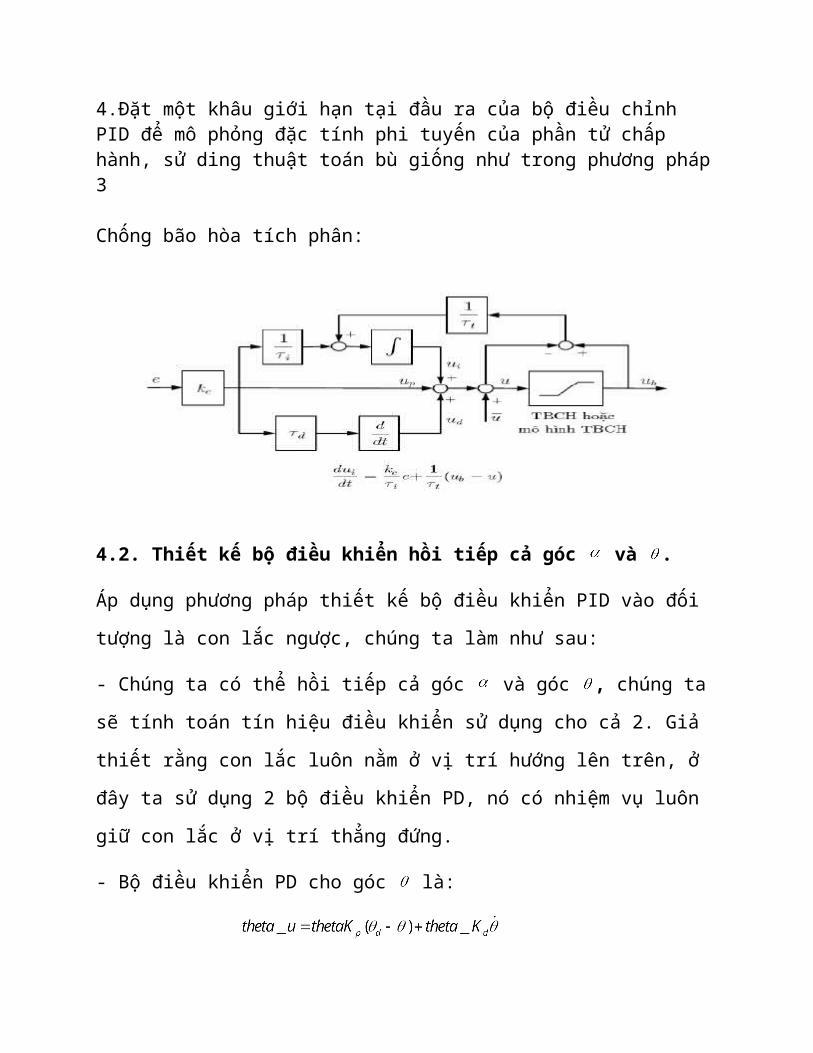
1.Cắt bỏ thành phần tích phân khi giá trị được lieu khiển đạt tới giá trị đặt, loại trừ hoàn toàn hiện tượng windup. 2.Giảm hệ số khuếch đại e đầu ra của bộ điều chỉnh nằm trong giới hạn cho phép, tránh việc xảy ra hiện tượng windup.3.Theo dõi giá trị thực của tin hiệu lieu khiển bị giới hạn và phản hồi về bộ điều chỉnh để giảm thành phần tích phân , hạn chế windup.4.Đặt một khâu giới hạn tại đầu ra của bộ điều chỉnh PID để mô phỏng đặc tính phi tuyến của phần tử chấp hành, sử ding thuật toán bù giống như trong phương pháp 3
Chống bão hòa tích phân:
4.2. Thiết kế bộ điều khiển hồi tiếp cả góc và .
Áp dụng phương pháp thiết kế bộ điều khiển PID vào đối tượng là con lắc ngược,
chúng ta làm như sau:
- Chúng ta có thể hồi tiếp cả góc và góc , chúng ta sẽ tính toán tín hiệu điều
khiển sử dụng cho cả 2. Giả thiết rằng con lắc luôn nằm ở vị trí hướng lên trên, ở
đây ta sử dụng 2 bộ điều khiển PD, nó có nhiệm vụ luôn giữ con lắc ở vị trí thẳng
đứng.
- Bộ điều khiển PD cho góc là:
ở đây là vị trí góc mong muốn của cánh tay quay sau khi đã ổn định
- Bộ điều khiển PD cho góc là:
ở đây .
- Tín hiệu điều khiển (điện áp đầu vào đưa vào động cơ) được cho như sau:

Sau khi tính toán ta thu được:
; ; ;
Sau khi mô phỏng bộ điều khiển trên Simulink như trên hình 14. Sử dụng mô hình
con lắc ngược nhu hình 6. Chúng ta sẽ sử dụng nhiễu với biên độ là 5 độ và chu kì
là 5(s) được thêm vào giá trị đo của góc như trên hình 15. Chúng ta nhận thấy
rằng bộ điều khiển là đủ tốt để giữ con lắc ở vị trí thẳng đứng và giúp nó ổn định ở
vị trí đó. Làm tương tự với góc và chúng ta cũng nhận thấy chất lượng của bộ
điều khiển là chấp nhận được. Kết quả được minh họa trên hình 16
Hình 14: Mô hình Simulink của bộ điều khiển

Hình 15: Đồ thị của tín hiệu điều khiển, góc theta, góc alpha khi alpha có nhiễu

Hình 16: Đồ thị của tín hiệu điều khiển, góc theta, góc alpha khi theta có nhiễu