Embed Size (px)
Citation preview
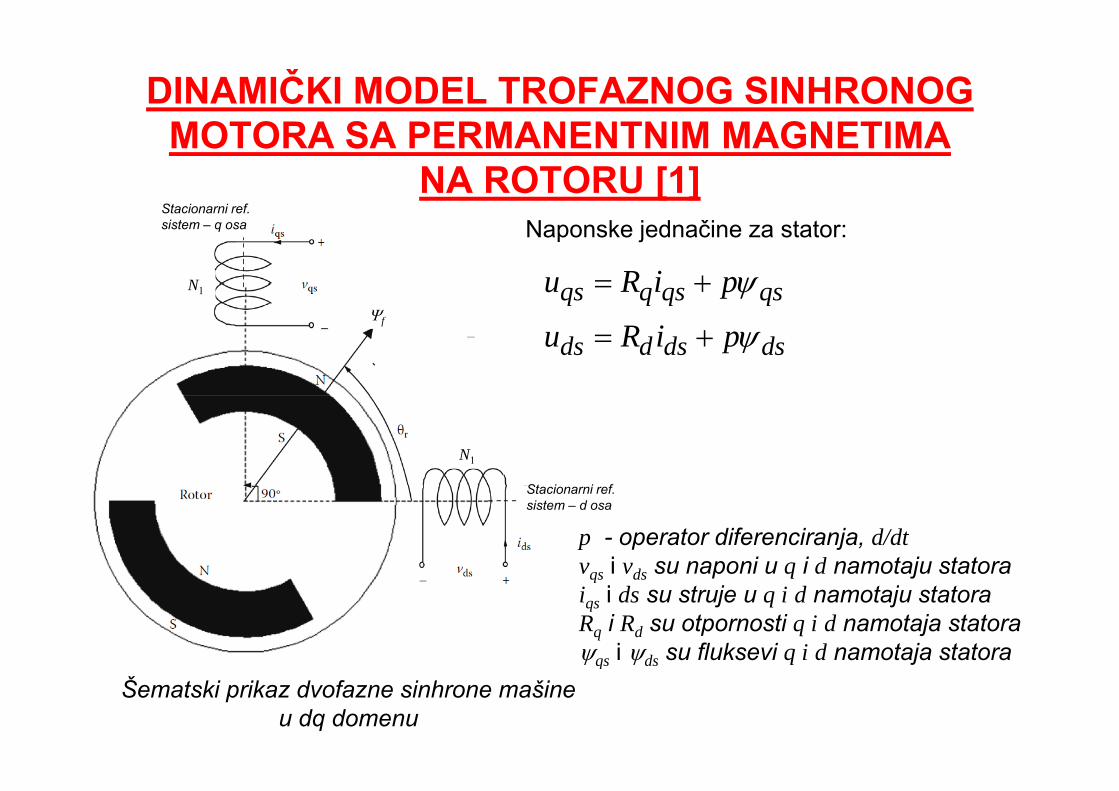
DINAMIČKI MODEL TROFAZNOG SINHRONOG MOTORA SA PERMANENTNIM MAGNETIMAMOTORA SA PERMANENTNIM MAGNETIMA
NA ROTORU [1]Stacionarni ref.
N1
Naponske jednačine za stator:
qs q qs qsu R i p
sistem – q osa
f
q q q q
ds d ds dsu R i p
N1
St i i f
p - operator diferenciranja, d/dtvqs i vds su naponi u q i d namotaju statora
Stacionarni ref. sistem – d osa
qs ds p q jiqs i ds su struje u q i d namotaju statoraRq i Rd su otpornosti q i d namotaja statoraqs i ds su fluksevi q i d namotaja statora
Šematski prikaz dvofazne sinhrone mašine u dq domenu
qs ds q
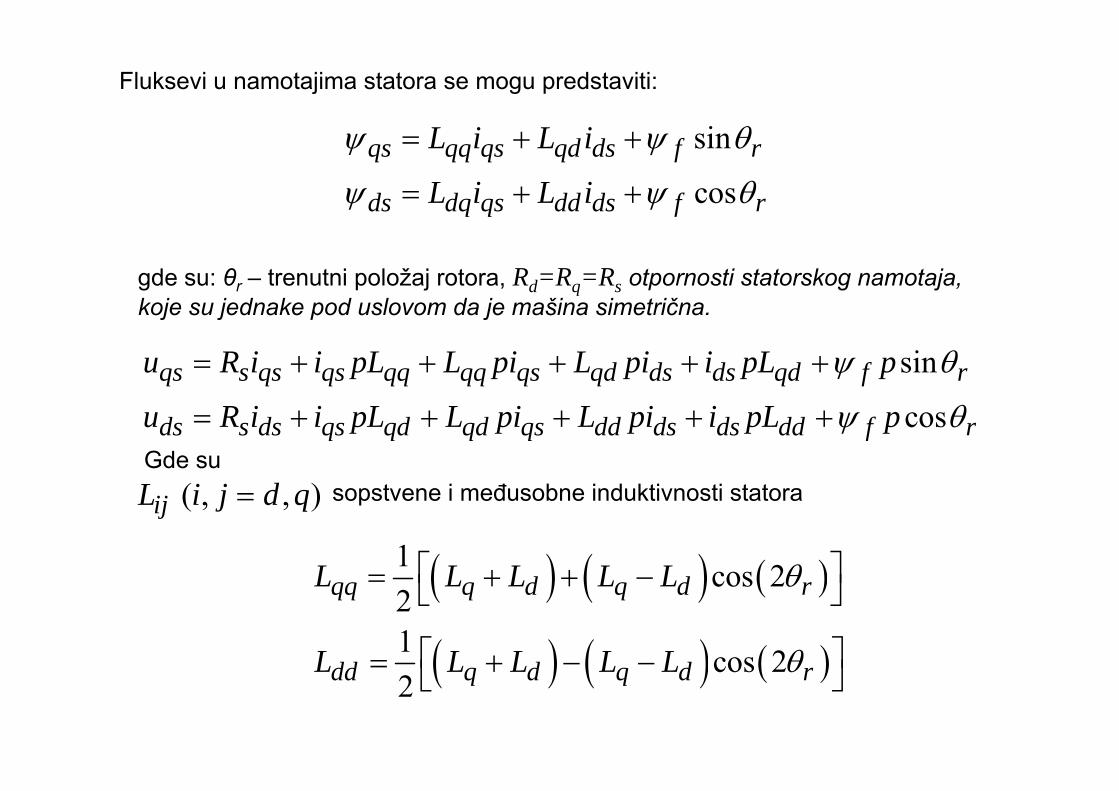
Fluksevi u namotajima statora se mogu predstaviti:
i sin
cosqs qq qs qd ds f r
ds dq qs dd ds f r
L i L i
L i L i
gde su: θr – trenutni položaj rotora, Rd=Rq=Rs otpornosti statorskog namotaja, koje su jednake pod uslovom da je mašina simetrična
q q f
koje su jednake pod uslovom da je mašina simetrična.
sinqs s qs qs qq qq qs qd ds ds qd f ru R i i pL L pi L pi i pL p
Gde su( )L i j d t i đ b i d kti ti t t
cosds s ds qs qd qd qs dd ds ds dd f ru R i i pL L pi L pi i pL p
( , , )ijL i j d q sopstvene i međusobne induktivnosti statora
1 cos 2L L L L L
cos 221 cos 2
qq q d q d r
dd d d
L L L L L
L L L L L
cos 22dd q d q d rL L L L L
Fluksevi u namotajima statora se mogu predstaviti:
i sin
cosqs qq qs qd ds f r
ds dq qs dd ds f r
L i L i
L i L i
Dakle za θr = 0o, Ldd=Ld , a za θr = 90o, Ldd=Lq.Dalje važi da je:
q q f
1 2
1 2
cos 2
cos 2qq r
dd
L L L
L L L
Gde je:
1 2 cos 2dd rL L L
11
dL L L
1
2
21
q d
q d
L L L
L L L
-Međusobne induktivnosti između namotaja u q i d osama su NULA, ako je rotor
2 2 q dL L L
cilindričan i gladak, jer fluks koji je stvorila struja u jednom namotaju neće biti obuhvaćennamotajem koji je pomeren za 90o .
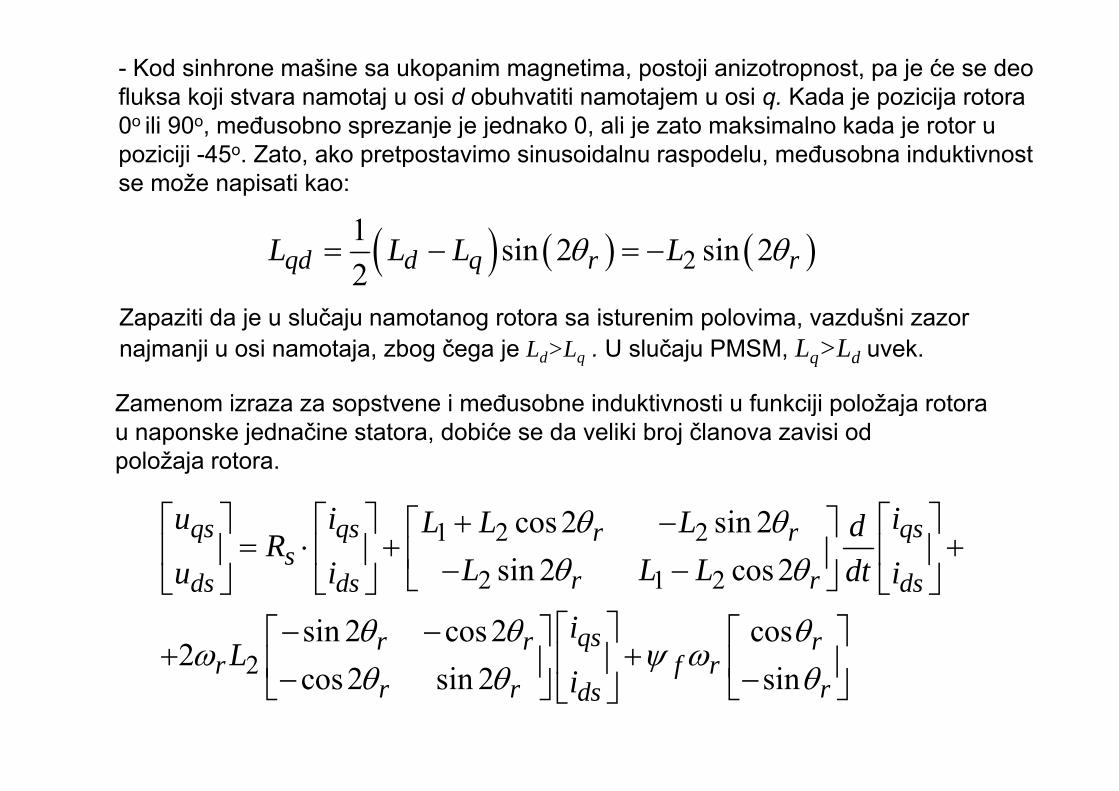
- Kod sinhrone mašine sa ukopanim magnetima, postoji anizotropnost, pa je će se deo fluksa koji stvara namotaj u osi d obuhvatiti namotajem u osi q. Kada je pozicija rotora0o ili 90o međusobno sprezanje je jednako 0 ali je zato maksimalno kada je rotor u0o ili 90o, međusobno sprezanje je jednako 0, ali je zato maksimalno kada je rotor u poziciji -45o. Zato, ako pretpostavimo sinusoidalnu raspodelu, međusobna induktivnost se može napisati kao:
21 sin 2 sin 22qd d q r rL L L L
Zapaziti da je u slučaju namotanog rotora sa isturenim polovima, vazdušni zazor najmanji u osi namotaja, zbog čega je Ld>Lq . U slučaju PMSM, Lq>Ld uvek.
Z i t i đ b i d kti ti f k iji l ž j tZamenom izraza za sopstvene i međusobne induktivnosti u funkciji položaja rotorau naponske jednačine statora, dobiće se da veliki broj članova zavisi odpoložaja rotora.
1 2 2
2 1 2
cos 2 sin 2sin 2 cos 2
qs qs qsr rs
d d d
u i iL L L dRL L L dtu i i
2 1 2
2
sin 2 cos 2
sin 2 cos 2 cos2
r rds ds ds
qsr r rr f r
L L L dtu i i
iL
22cos 2 sin 2 sinr f r
r r rdsL
i
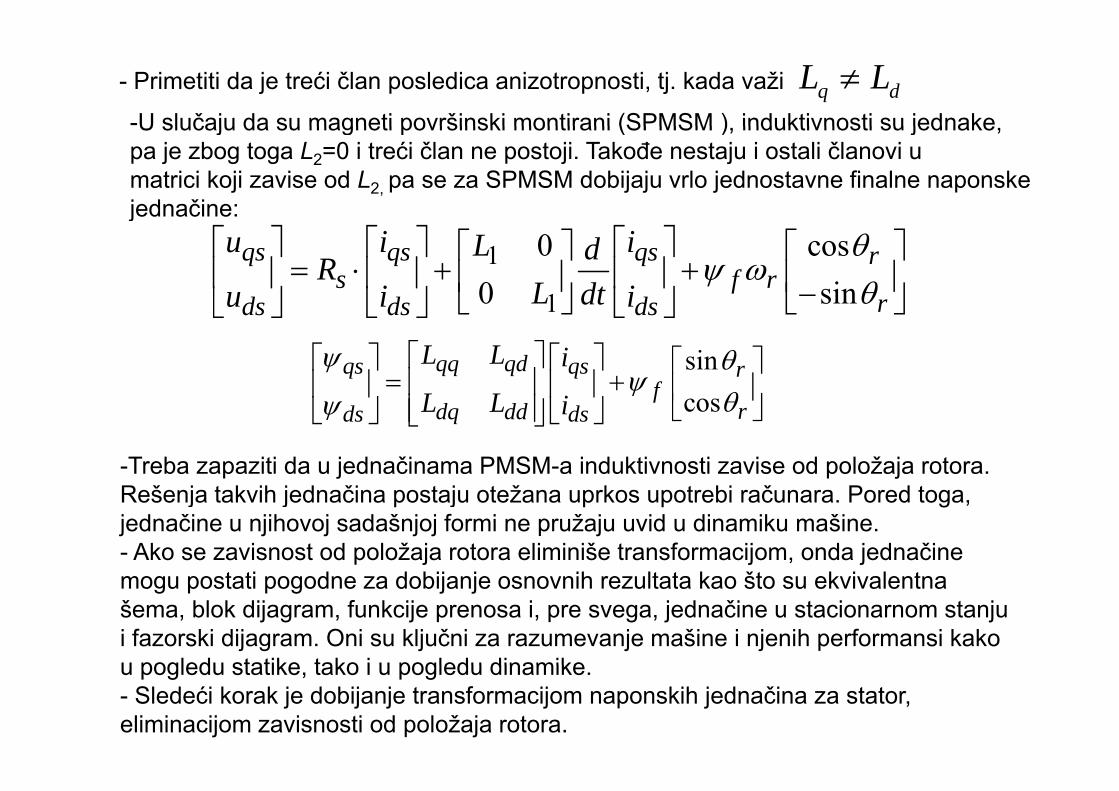
- Primetiti da je treći član posledica anizotropnosti, tj. kada važi q dL L-U slučaju da su magneti površinski montirani (SPMSM ) induktivnosti su jednakeU slučaju da su magneti površinski montirani (SPMSM ), induktivnosti su jednake, pa je zbog toga L2=0 i treći član ne postoji. Takođe nestaju i ostali članovi u matrici koji zavise od L2, pa se za SPMSM dobijaju vrlo jednostavne finalne naponskejednačine:jednačine:
1
1
0 cos0 sin
qs qs qs rs f r
rds ds ds
u i iL dRL dtu i i
1 rds ds dsu i i
sinqq qdqs qs rf
L L iL L
-Treba zapaziti da u jednačinama PMSM-a induktivnosti zavise od položaja rotora.R š j k ih j d či j ž k bi č P d
cosfrdq ddds dsL L i
Rešenja takvih jednačina postaju otežana uprkos upotrebi računara. Pored toga, jednačine u njihovoj sadašnjoj formi ne pružaju uvid u dinamiku mašine. - Ako se zavisnost od položaja rotora eliminiše transformacijom, onda jednačine
t ti d d bij j ih lt t k št k i l tmogu postati pogodne za dobijanje osnovnih rezultata kao što su ekvivalentnašema, blok dijagram, funkcije prenosa i, pre svega, jednačine u stacionarnom stanjui fazorski dijagram. Oni su ključni za razumevanje mašine i njenih performansi kako u pogledu statike tako i u pogledu dinamikeu pogledu statike, tako i u pogledu dinamike.- Sledeći korak je dobijanje transformacijom naponskih jednačina za stator, eliminacijom zavisnosti od položaja rotora.
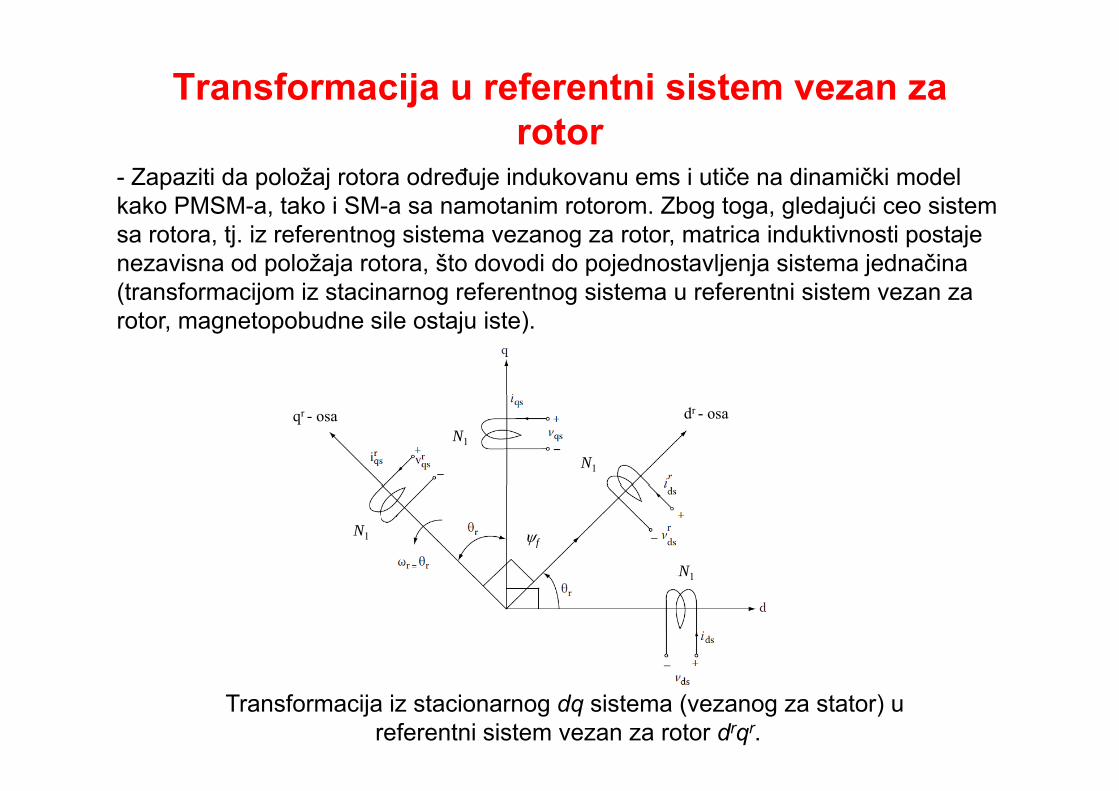
Transformacija u referentni sistem vezan za rotorrotor
- Zapaziti da položaj rotora određuje indukovanu ems i utiče na dinamički model kako PMSM-a, tako i SM-a sa namotanim rotorom. Zbog toga, gledajući ceo sistem , g g , g jsa rotora, tj. iz referentnog sistema vezanog za rotor, matrica induktivnosti postaje nezavisna od položaja rotora, što dovodi do pojednostavljenja sistema jednačina (transformacijom iz stacinarnog referentnog sistema u referentni sistem vezan za rotor, magnetopobudne sile ostaju iste).
N1
N1
dr - osaqr - osa
N1
N1 f
N1
Transformacija iz stacionarnog dq sistema (vezanog za stator) u referentni sistem vezan za rotor drqr.
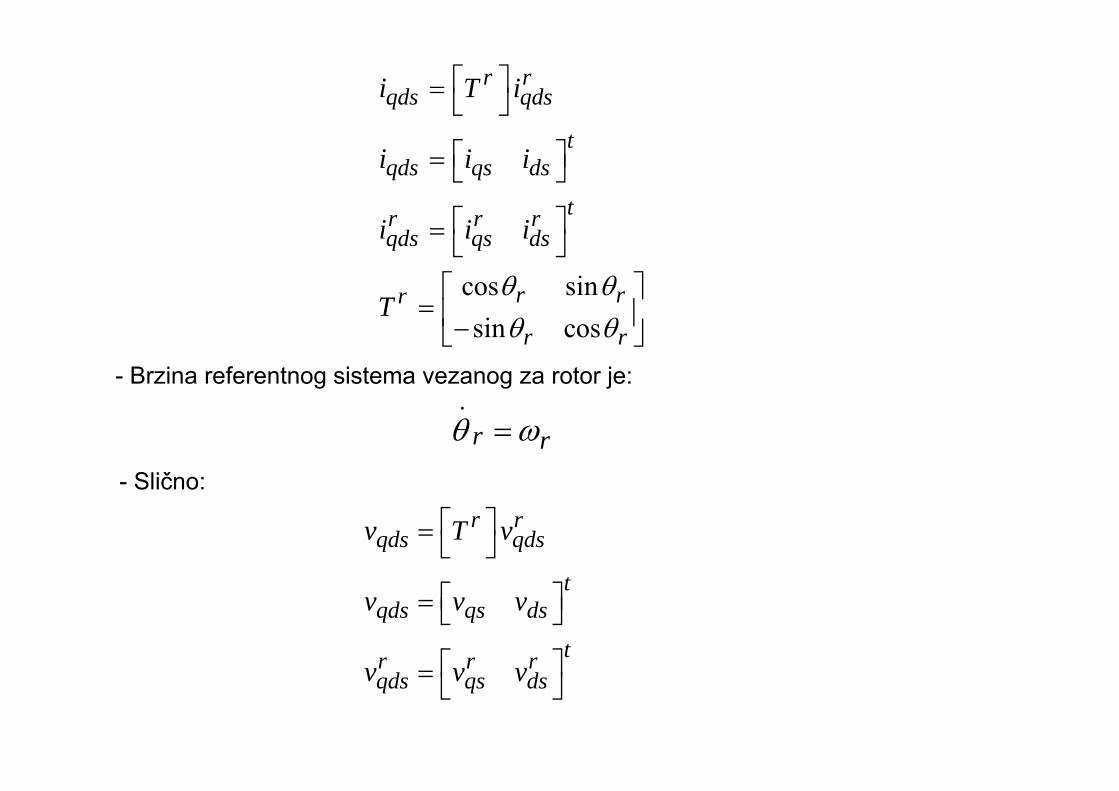
r rqds qdsi T i
tqds qs ds
tr r r
i i i
cos sin
r r rqds qs ds
r rr
i i i
T
sin cosr rT
- Brzina referentnog sistema vezanog za rotor je:.r r
- Slično:Slično:r r
qds qdsv T v t
qds qs ds
tr r r
v v v
r r rqds qs dsv v v
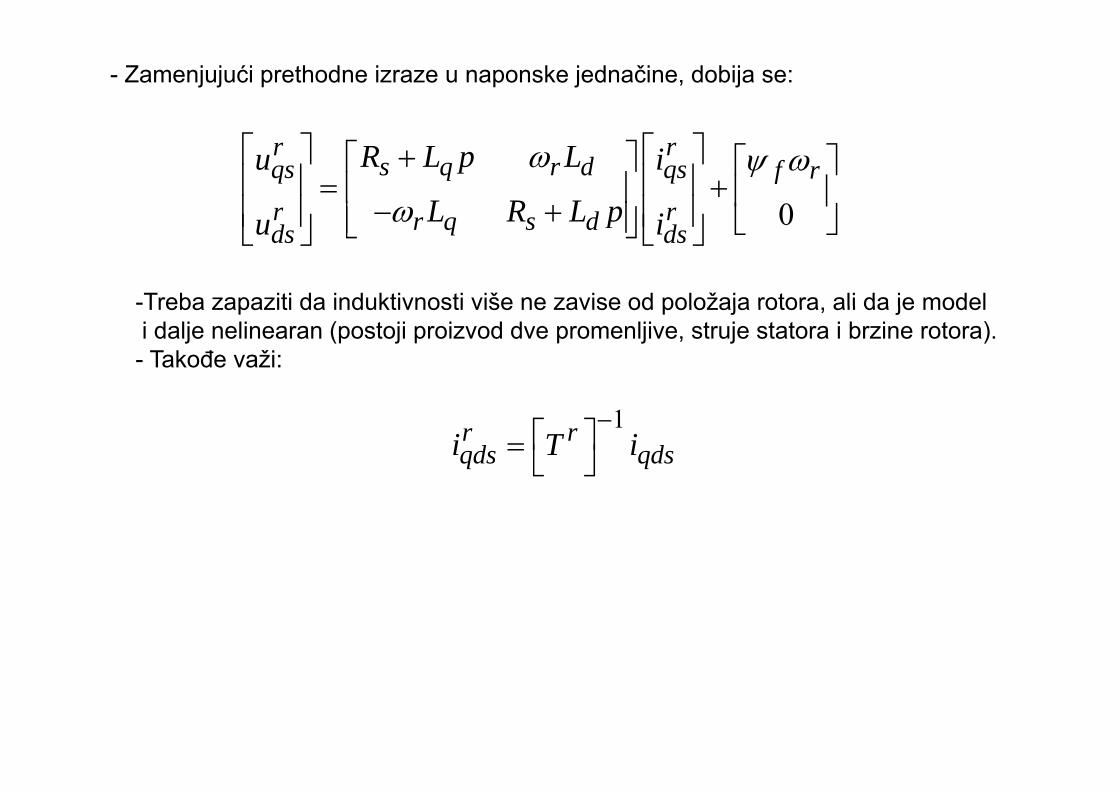
- Zamenjujući prethodne izraze u naponske jednačine, dobija se:
0
r rs q r dqs qs f r
r rd
R L p Lu iL R L p i
0r rr q s dds ds
L R L pu i
-Treba zapaziti da induktivnosti više ne zavise od položaja rotora ali da je modelTreba zapaziti da induktivnosti više ne zavise od položaja rotora, ali da je modeli dalje nelinearan (postoji proizvod dve promenljive, struje statora i brzine rotora).- Takođe važi:
1r rqds qdsi T i
Transformacija trofaznog u dvofazni sistem
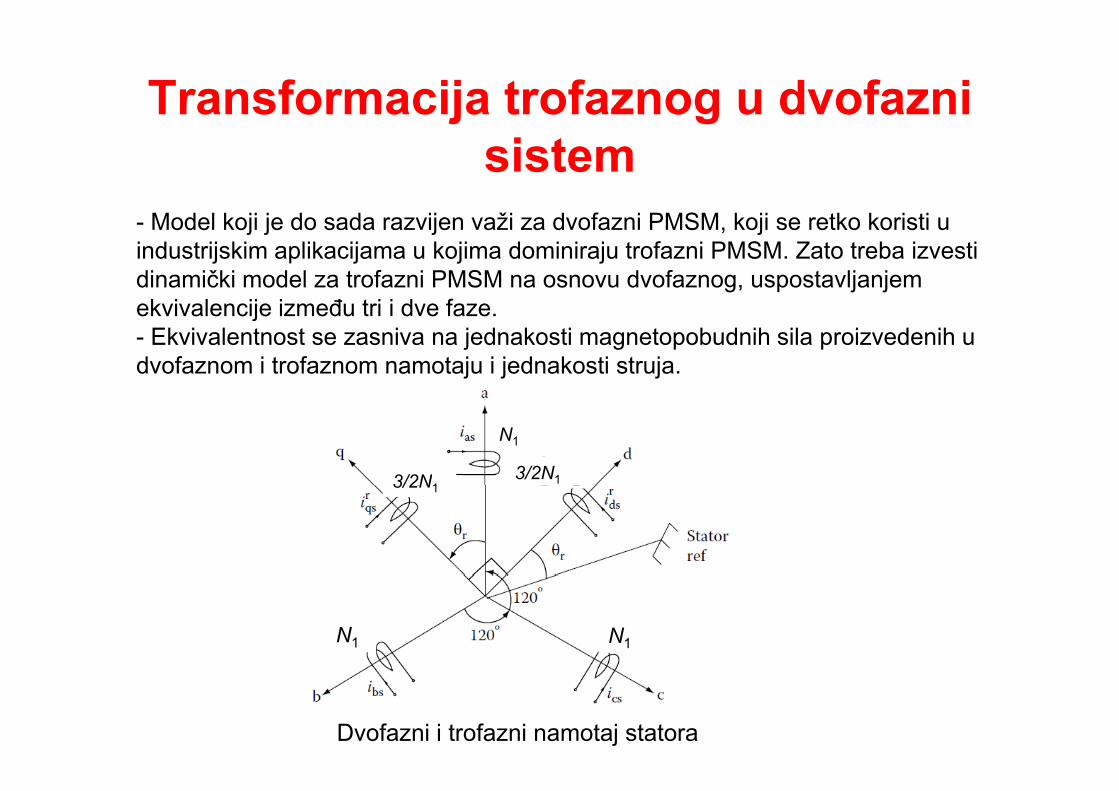
M d l k ji j d d ij ži d f i PMSM k ji tk k i ti- Model koji je do sada razvijen važi za dvofazni PMSM, koji se retko koristi u industrijskim aplikacijama u kojima dominiraju trofazni PMSM. Zato treba izvesti dinamički model za trofazni PMSM na osnovu dvofaznog, uspostavljanjem ekvivalencije između tri i dve fazeekvivalencije između tri i dve faze.- Ekvivalentnost se zasniva na jednakosti magnetopobudnih sila proizvedenih u dvofaznom i trofaznom namotaju i jednakosti struja.
3/2N13/2N1
N1
3/2N1
N1N1
Dvofazni i trofazni namotaj statora
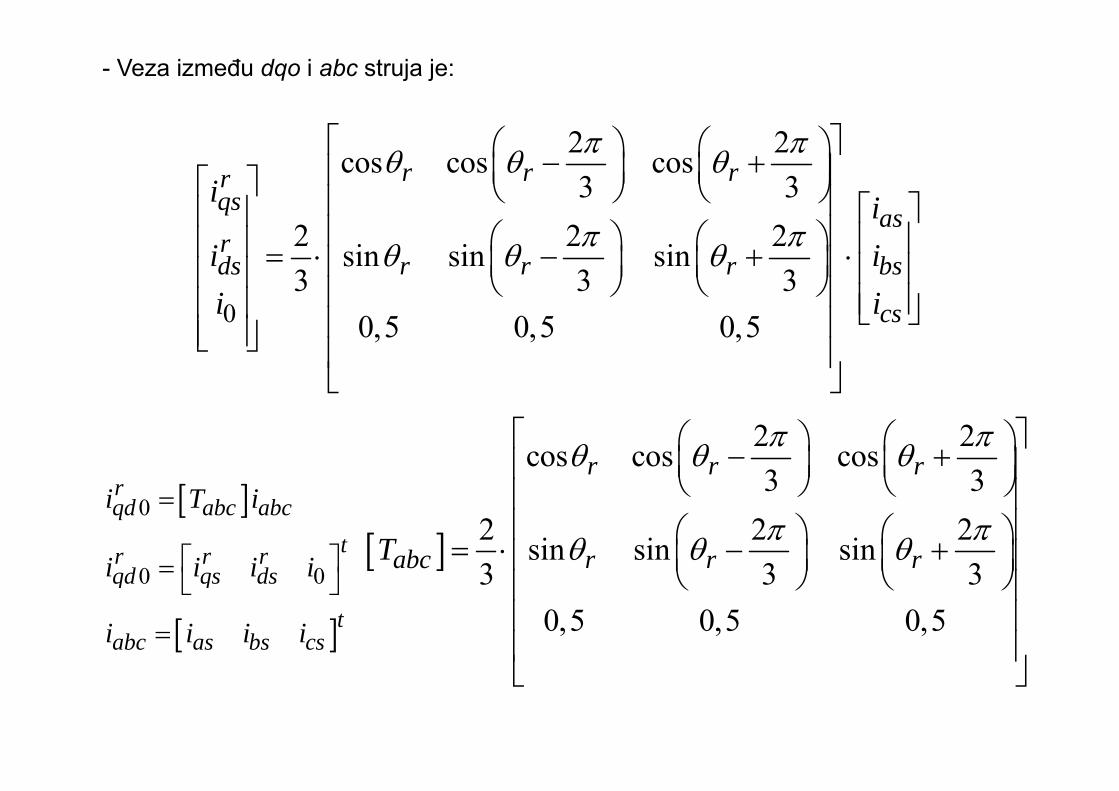
- Veza između dqo i abc struja je:
2 2cos cos cos3 3r r rr
qs asi i
0
2 2 2sin sin sin3 3 3
asrds r r r bs
ii ii i
0 0,5 0,5 0,5 csi i
r
2 2cos cos cos3 3r r r 0
0 0
rqd abc abc
tr r rqd qs ds
i T i
i i i i
3 32 2 2sin sin sin3 3 3abc r r rT
0 0qd qs ds
tabc as bs cs
i i i i
i i i i
3 3 30,5 0,5 0,5
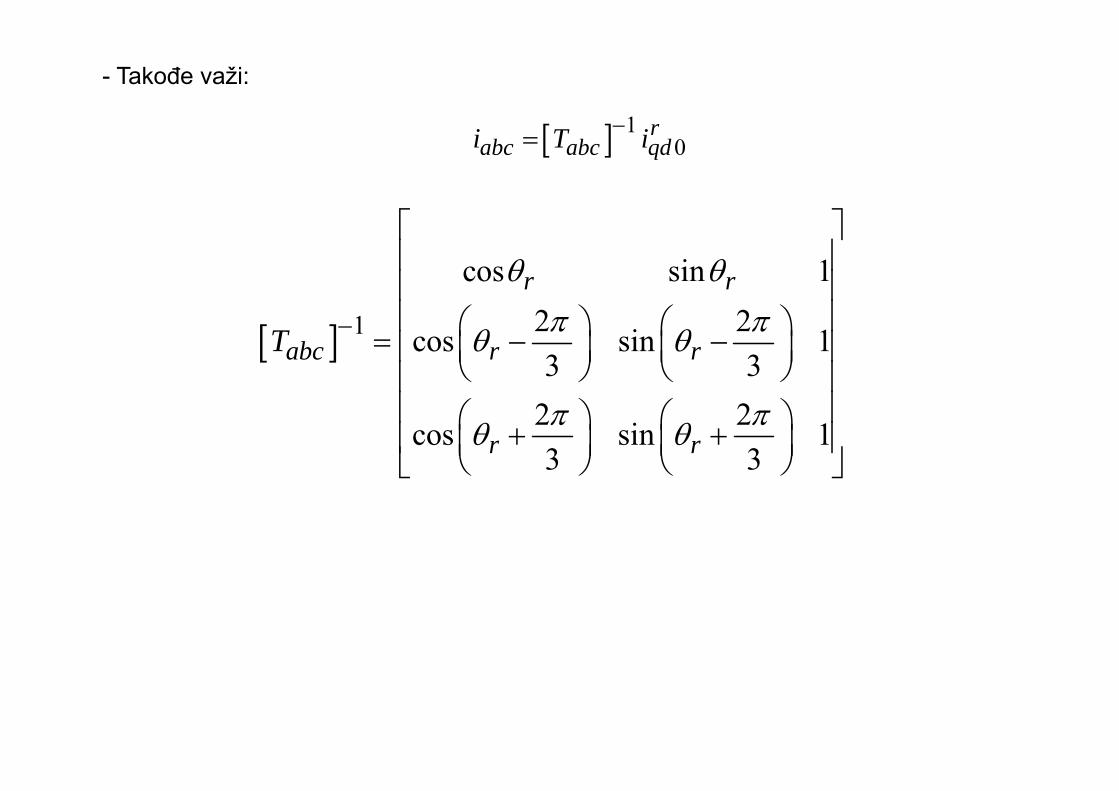
- Takođe važi:
1 r 10
rabc abc qdi T i
cos sin 1r r
1 2 2cos sin 1
3 3abc r rT
2 2cos sin 13 3r r
Izraz za snaguIzraz za snagu- Ulazna snaga trofazne mašine mora biti jednaka ulaznoj snazi dvofazne mašine, koja ima značajno mesto u modelovanju, analizi i simulaciji. Ovakav princip je usvojen u izvođnju izraza za snagu:
ti abc abc as as bs bs cs csp u i u i u i u i
10
1
i abc abc as as bs bs cs csr
abc abc qdi T i
10
rabc abc qdu T u
tt
1 10 0
3
ttr ri qd abc abc qdp u T T i
0 03 223
r r r ri qs qs ds dsp u i u i u i
32
r r r ri qs qs ds dsp u i u i
Izraz za elektromagnetni momentIzraz za elektromagnetni moment-Elektromagnetni moment je najvažnija izlazna veličina koja određujemehaničku dinamiku mašine, tj. poziciju rotora i brzinu. Dakle, izlaznasnaga je razlika između ulazne snage i gubitaka snage u stacionarnom stanju. - Na osnovu ovih zaključaka, elektromagnetni moment je izveden na sledeći način:
rU R i L pi G i
t t t ti rp i U i R i i L pi i G i
Gde je:Gde je:[R] – matrica otpornosti[L] – matrica koja se sastoji od induktivnosti koje idu uz operator diferenciranja pj p[G] - matrica čiji su elementi koeficijenti koji idu uz električnu brzinu rotora, ωr- Prvi član u izrazu za snagu predstavlja električne gubitke u statoru i rotoru, drugi promenu magnetne energije u sprežnom polju, a treći član predstavlja snagu obrtnog polja.
- Prema tome, važi da je:
t t
t tm e a r m
te
m P i G i i G iP
m Pi G i
e
- P je broj pari polova. Zamenjujući vrednosti iz matrice G, dobija se:
3 Nm2
r re f d q ds qs
Pm L L i i
32
r r r ri qs qs ds dsp u i u i
2 232
r r r r r r r rs qs ds q qs qs d ds ds r f d q ds qsR i i L i pi L i pi L L i i
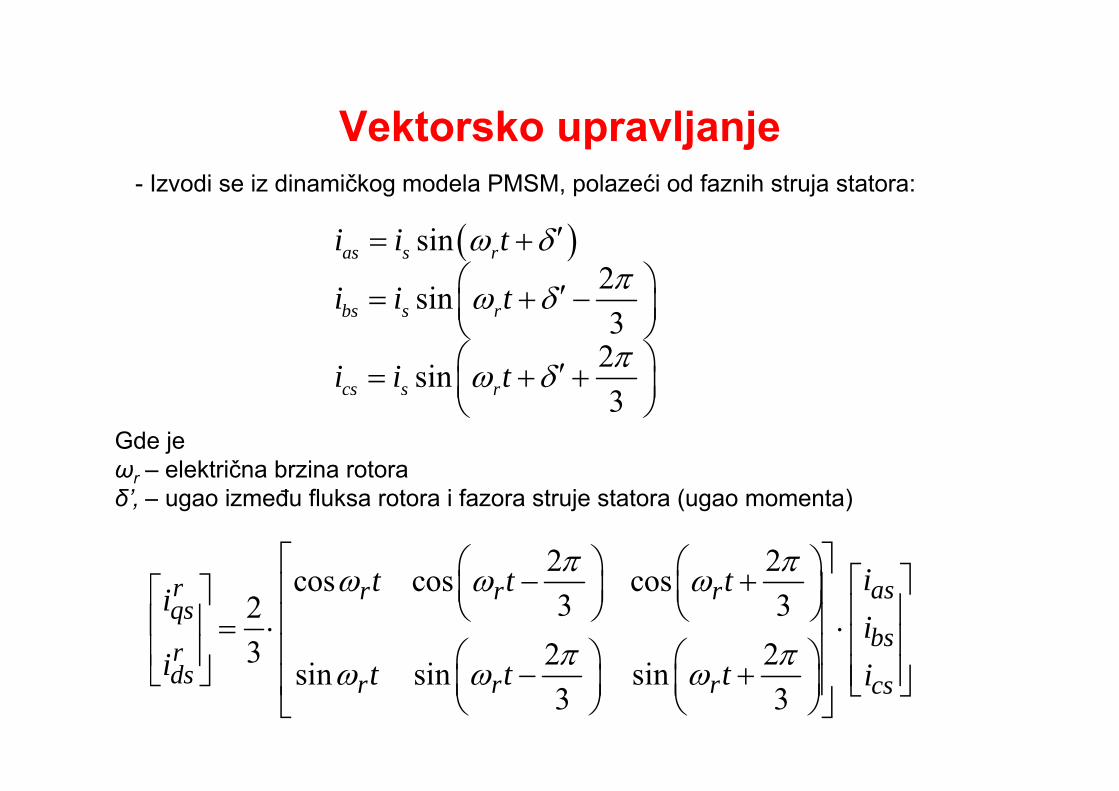
Vektorsko upravljanjeVektorsko upravljanje- Izvodi se iz dinamičkog modela PMSM, polazeći od faznih struja statora:
sin2sin
as s r
b
i i t
i i t
sin
32sin3
bs s r
cs s r
i i t
i i t
3
Gde jeωr – električna brzina rotoraδ’‚ – ugao između fluksa rotora i fazora struje statora (ugao momenta)
2 2 it t t cos cos cos3 32
3 2 2i i i
r asr r rqs
bsrd
it t tii
i
sin sin sin3 3
ds r r r csi t t t i
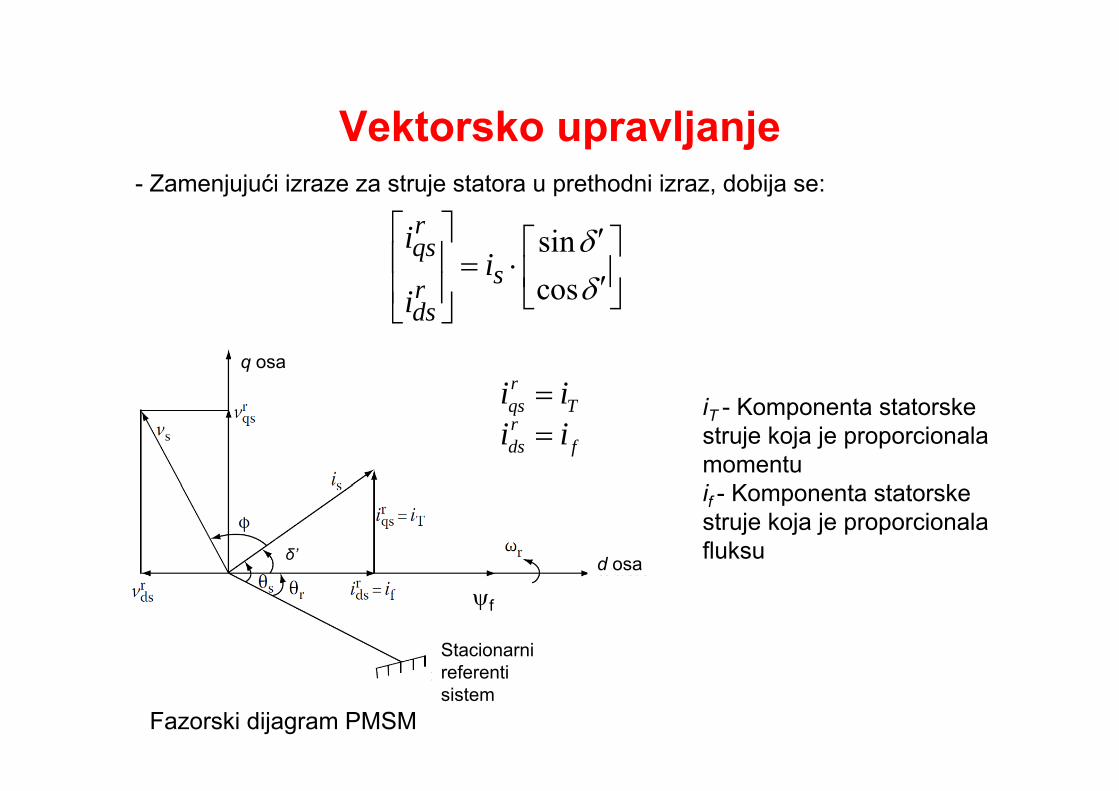
Vektorsko upravljanjeVektorsko upravljanje- Zamenjujući izraze za struje statora u prethodni izraz, dobija se:
sincos
rqs
srd
ii
i
dsi q osa
ri i iT - Komponenta statorske struje koja je proporcionala momentui K t t t k
qs Trds f
i ii i
if - Komponenta statorske struje koja je proporcionala fluksud osaδ’
f
Stacionarni referentisistem
Fazorski dijagram PMSM
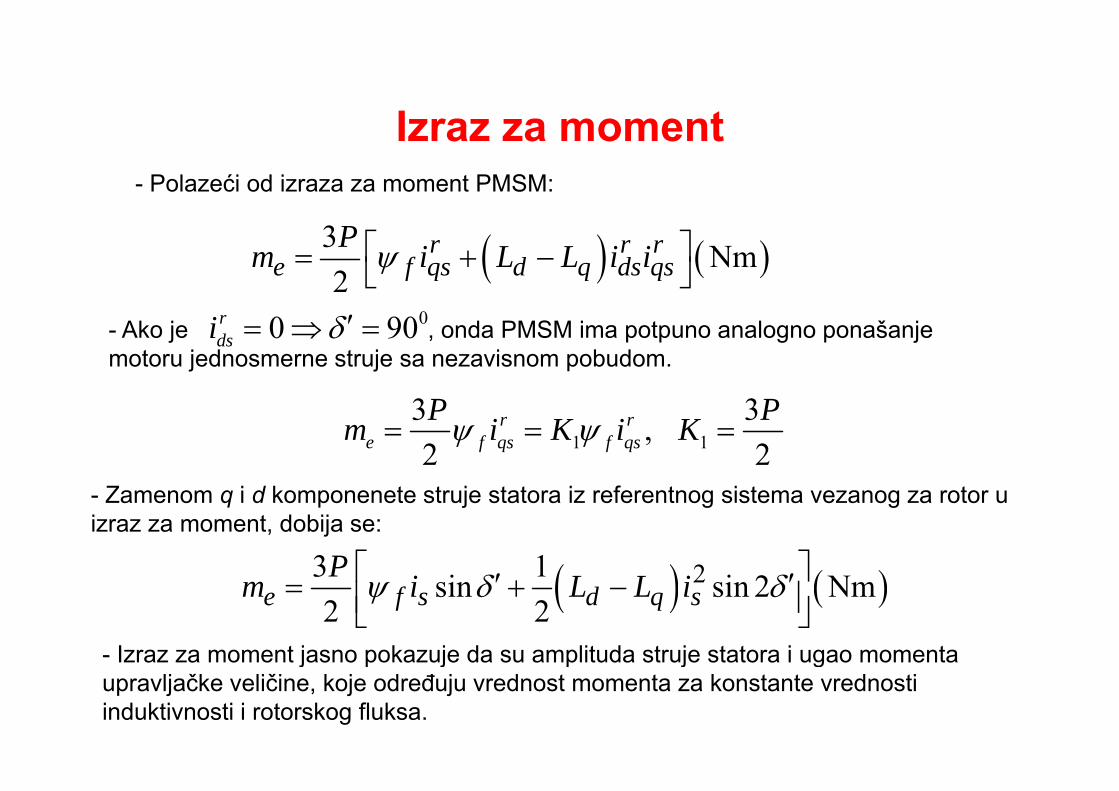
Izraz za momentIzraz za moment- Polazeći od izraza za moment PMSM:
3 Nm2
r r re f qs d q ds qs
Pm i L L i i 00 90r
dsi - Ako je , onda PMSM ima potpuno analogno ponašanje motoru jednosmerne struje sa nezavisnom pobudom.
1 13 3,2 2
r re f qs f qs
P Pm i K i K
- Zamenom q i d komponenete struje statora iz referentnog sistema vezanog za rotor u izraz za moment, dobija se:
23 1i i 2P 23 1sin sin 2 Nm2 2e f s d q sPm i L L i
- Izraz za moment jasno pokazuje da su amplituda struje statora i ugao momenta j p j p j gupravljačke veličine, koje određuju vrednost momenta za konstante vrednosti induktivnosti i rotorskog fluksa.
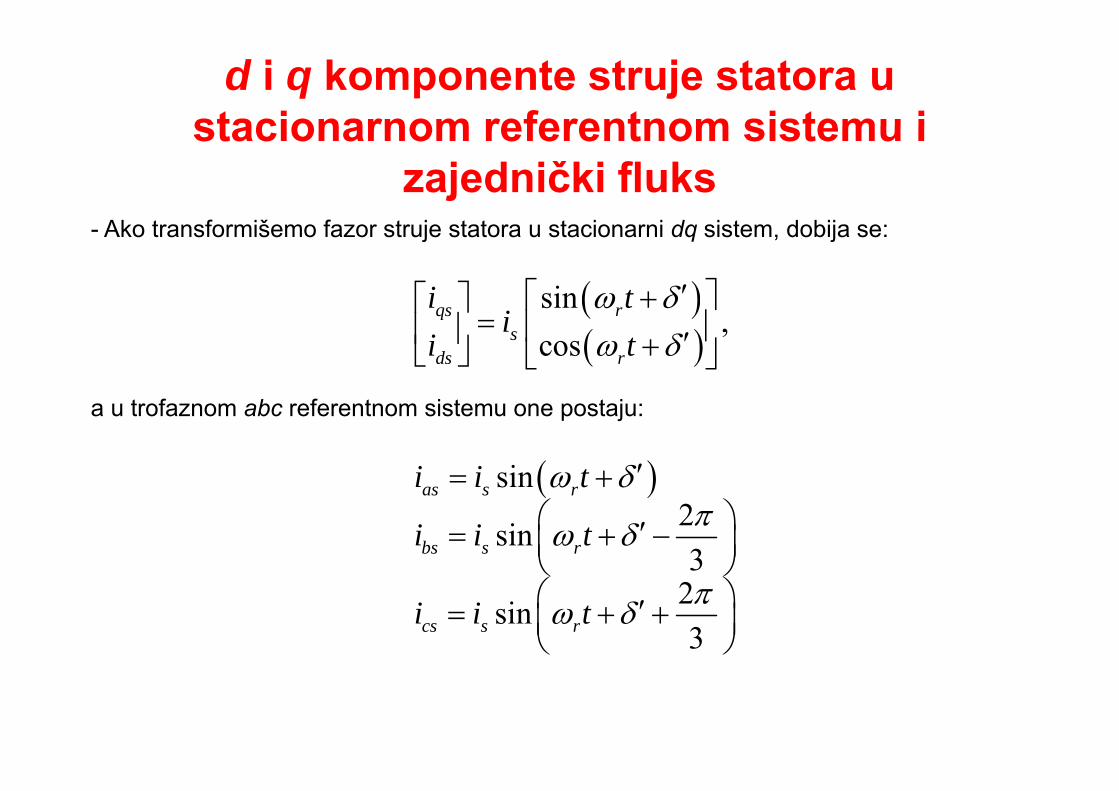
d i q komponente struje statora u stacionarnom referentnom sistemu istacionarnom referentnom sistemu i
zajednički fluks
sini t
- Ako transformišemo fazor struje statora u stacionarni dq sistem, dobija se:
sin,
cosqs r
sds r
i ti
i t
a u trofaznom abc referentnom sistemu one postaju:
sini i t sin2sin3
as s r
bs s r
i i t
i i t
2sin3cs s ri i t
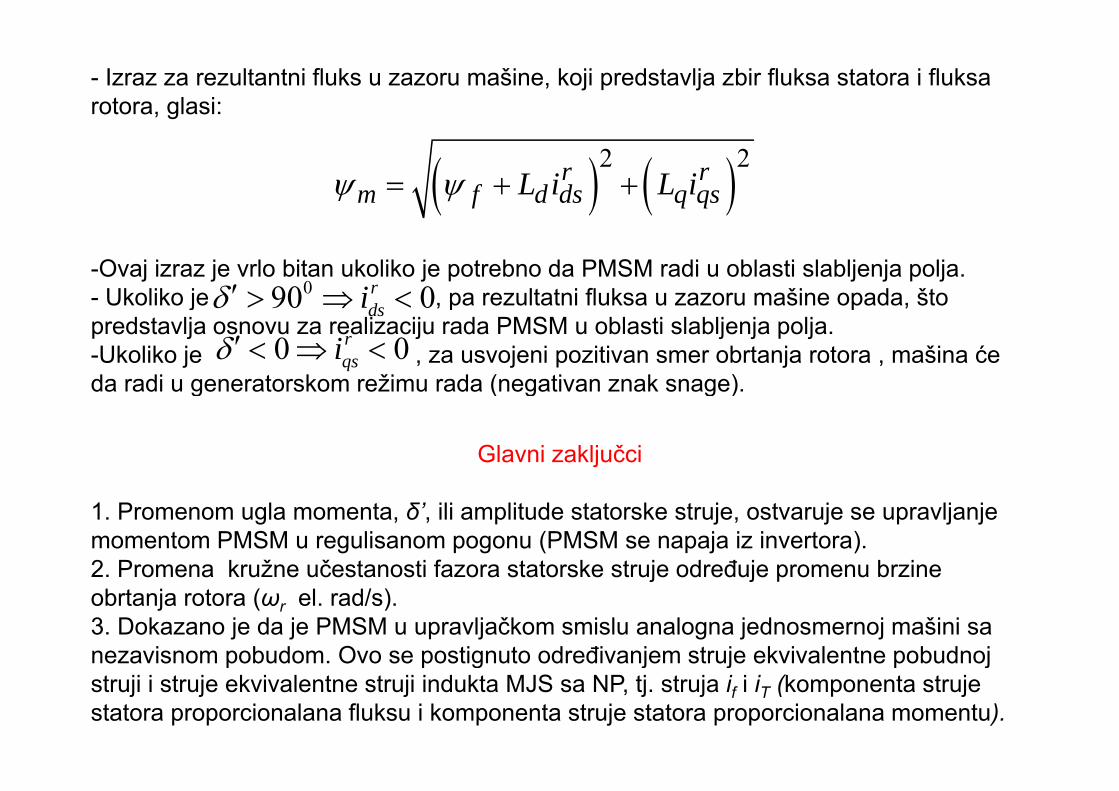
- Izraz za rezultantni fluks u zazoru mašine, koji predstavlja zbir fluksa statora i fluksa rotora, glasi:
2 2r rm f d ds q qsL i L i
-Ovaj izraz je vrlo bitan ukoliko je potrebno da PMSM radi u oblasti slabljenja polja.- Ukoliko je , pa rezultatni fluksa u zazoru mašine opada, što 090 0r
di j , p p ,predstavlja osnovu za realizaciju rada PMSM u oblasti slabljenja polja.-Ukoliko je , za usvojeni pozitivan smer obrtanja rotora , mašina će da radi u generatorskom režimu rada (negativan znak snage).
90 0dsi
0 0rqsi
g ( g g )
Glavni zaključci
1. Promenom ugla momenta, δ’, ili amplitude statorske struje, ostvaruje se upravljanje momentom PMSM u regulisanom pogonu (PMSM se napaja iz invertora).2. Promena kružne učestanosti fazora statorske struje određuje promenu brzine2. Promena kružne učestanosti fazora statorske struje određuje promenu brzine obrtanja rotora (ωr el. rad/s).3. Dokazano je da je PMSM u upravljačkom smislu analogna jednosmernoj mašini sa nezavisnom pobudom. Ovo se postignuto određivanjem struje ekvivalentne pobudnoj p p g j j p jstruji i struje ekvivalentne struji indukta MJS sa NP, tj. struja if i iT (komponenta struje statora proporcionalana fluksu i komponenta struje statora proporcionalana momentu).
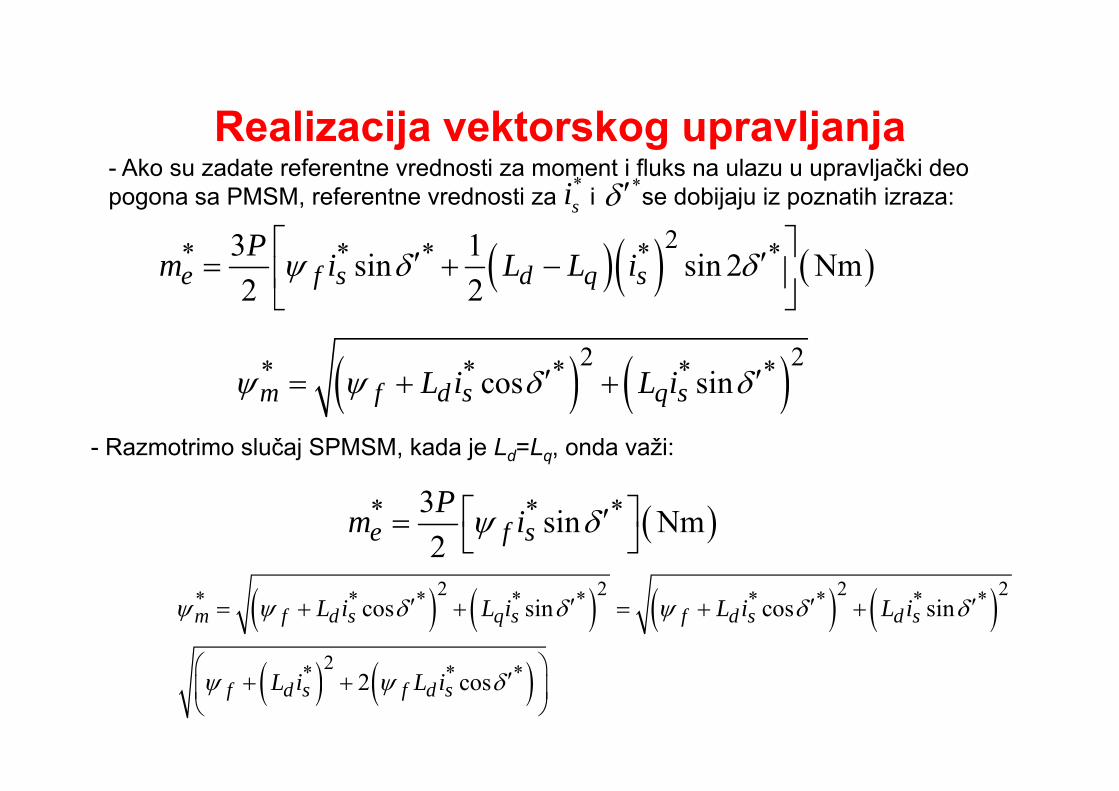
Realizacija vektorskog upravljanjaRealizacija vektorskog upravljanja- Ako su zadate referentne vrednosti za moment i fluks na ulazu u upravljački deo pogona sa PMSM, referentne vrednosti za i se dobijaju iz poznatih izraza:*
si*
2* * * * *3 1sin sin 2 Nm
2 2e f s d q sPm i L L i
2 2* * * * *cos sinm f d s q sL i L i m f d s q s
- Razmotrimo slučaj SPMSM, kada je Ld=Lq, onda važi:
* * *3 sin Nm2e f sPm i
2 2 2 2* * * * * * * * *
2
cos sin cos sinm f d s q s f d s d sL i L i L i L i
2* * *2 cosf d s f d sL i L i
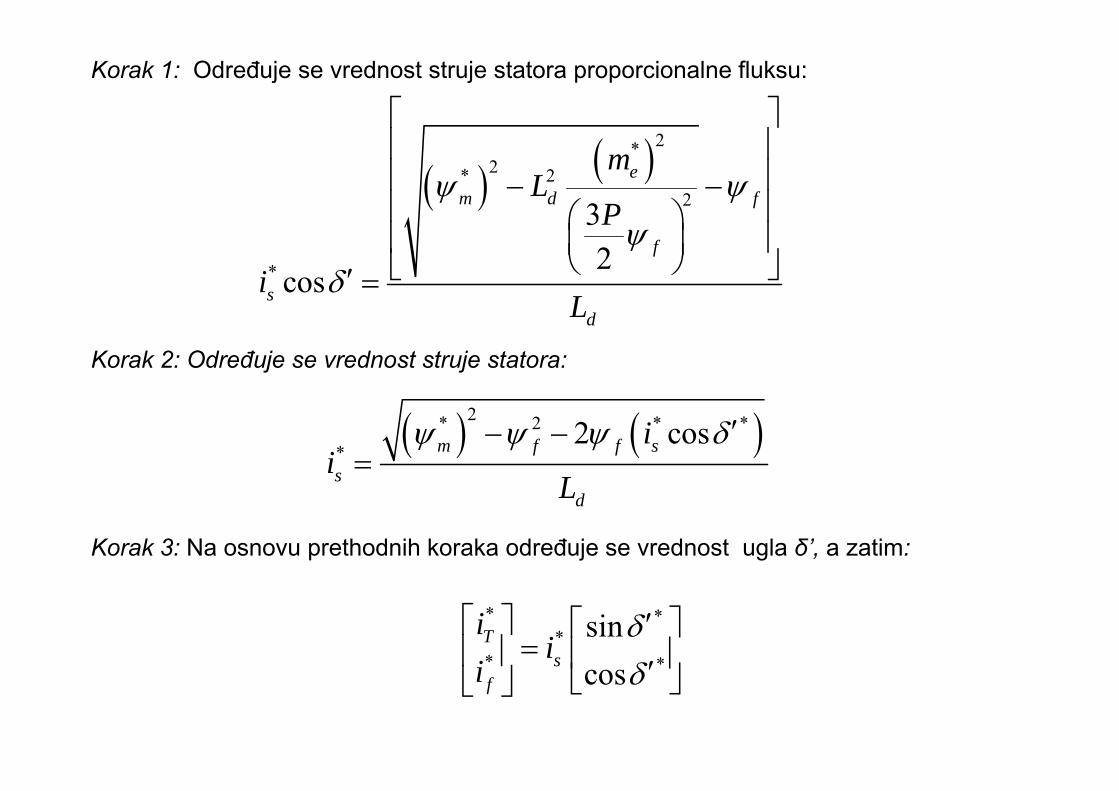
Korak 1: Određuje se vrednost struje statora proporcionalne fluksu:
2*2* 2
23e
m d f
mL
P
*
32
cosf
s
P
iL
dL
Korak 2: Određuje se vrednost struje statora:
2* 2 * **
2 cosm f f ss
ii
L
dL
Korak 3: Na osnovu prethodnih koraka određuje se vrednost ugla δ’, a zatim:
* **
* *
sinTs
ii
i
coss
fi
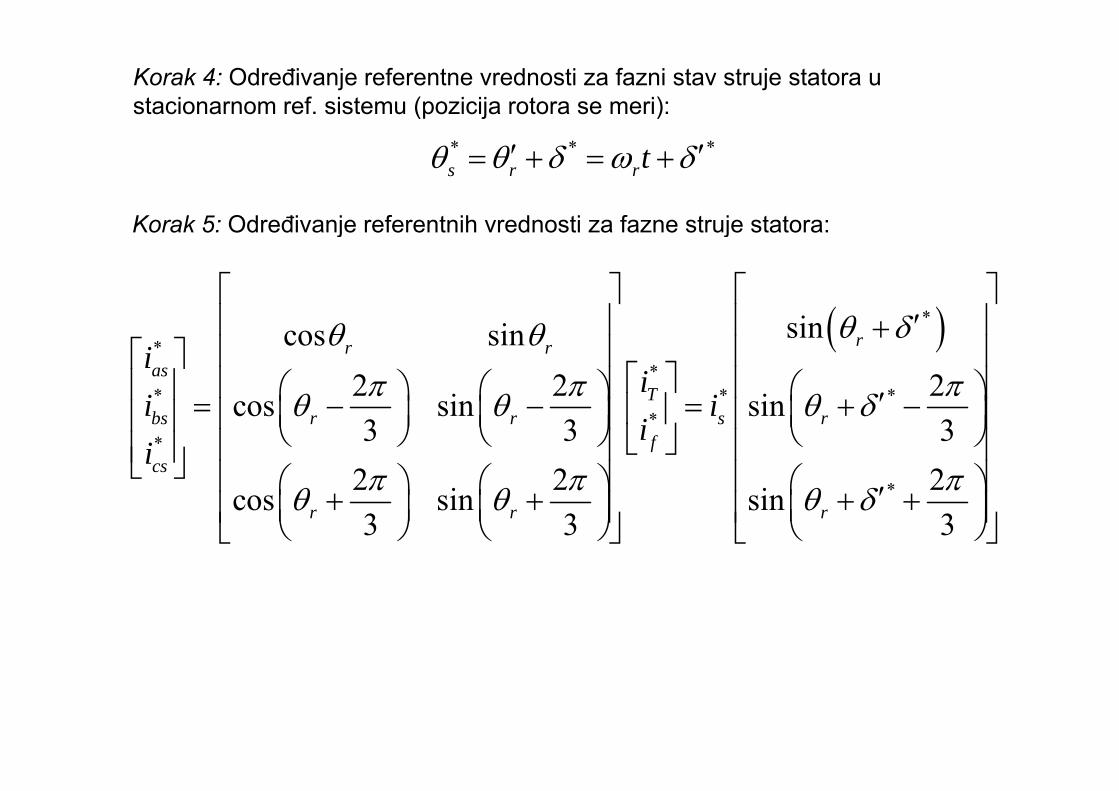
Korak 4: Određivanje referentne vrednosti za fazni stav struje statora u stacionarnom ref. sistemu (pozicija rotora se meri):
* * *s r rt
K k 5 Od đi j f t ih d ti f t j t t
Korak 5: Određivanje referentnih vrednosti za fazne struje statora:
**
** * *
sincos sin2 2 2i i
rr ras
T
ii
i i
* * *
**
*
2 2 2cos sin sin3 3 3
2 2 2
Tbs r r s r
fcs
i ii
i
*2 2 2cos sin sin3 3 3r r r
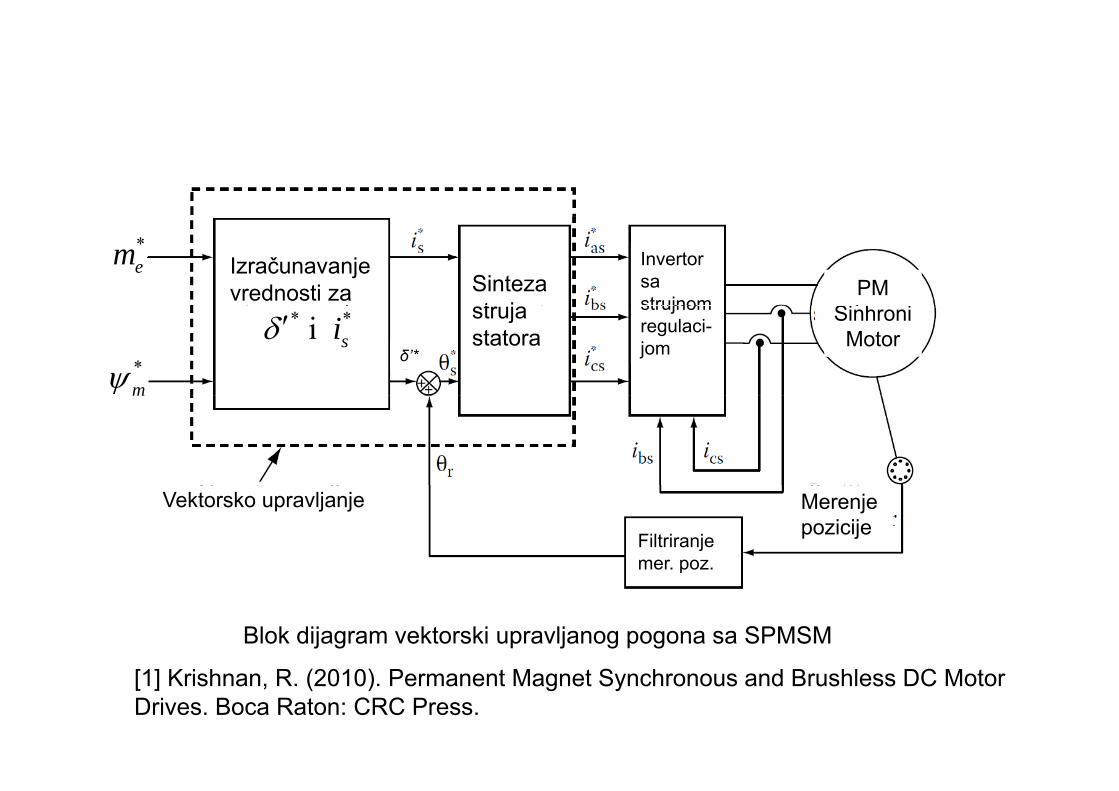
*em Izračunavanje
vrednosti za Sinteza t j
Invertor sa strujnom
PMSi h i
*m
* *i si strujastatora
strujnom regulaci-jom
Sinhroni Motor
δ’*
m
Merenjepozicije
Vektorsko upravljanje
Filtriranjemer. poz.
Blok dijagram vektorski upravljanog pogona sa SPMSM
[1] Krishnan, R. (2010). Permanent Magnet Synchronous and Brushless DC Motor Drives. Boca Raton: CRC Press.