Embed Size (px)
Citation preview

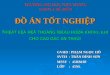
CHƯƠNG DẪN NHẬP
GVHD: Th.s Tống Thanh Nhân Trang 1 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG DẪN NHẬP
Ngày nay với sự phát triển vượt bậc của khoa học công nghệ, các thiết bị điện
đã dần phổ biến trên khắp đất nước. Nhưng một thực trạng hiện nay là tình trạng thiếu
năng lượng hoặc sự cố gây mất điện vẫn diễn ra thường xuyên. Những sự cố mất điện
bất ngờ như vậy có thể gây hại hoặc hư hỏng cho các thiết bị điện, cũng như có thể gây
những hậu quả nghiêm trọng hơn ví dụ như dừng hoạt động của hệ thống đèn tín hiệu
giao thông , mất dữ liệu trên máy tính hoặc server….
Vì vậy cần có một thiết bị có thể cung cấp năng lượng tạm thời khi mất điện đột
ngột . UPS (Uninterruptible Power Supply) ra đời nhằm đáp ứng yêu cầu cung cấp một
nguồn điện liên tục cho các thiết bị điện trước các sự cố mất điện bất ngờ. Sau đó nhiều
chức năng khác như chống sét, lọc nhiễu, ổn tần, ổn áp được phát triển thêm vào UPS
giúp thiêt bị có thể đáp ứng được các yêu cầu của một nguồn điện liên tục.
Trong đề tài này sẽ nghiên cứu phát triển dòng UPS online có thời gian chuyển
mạch ngắn nhất phù hợp với các thiết bị có độ nhạy về điện cao. Ứng dụng vi xử lý
pic 16f877a vào mạch điện công suất.

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 2 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN(UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
1.1 GIỚI THIỆU VỀ BỘ LƯU ĐIỆN (UPS) UPS (Uninterruptible Power Supply) là một thiết bị có thể cung cấp tạm thời điện
năng nhằm duy trì sự hoạt động của thiết bị sử dụng điện lưới gặp sự cố (mất điện, sụt
giảm điện áp quá thấp, sự cố khác…) trong một khoảng thời gian với công suất giới
hạn theo khả năng của nó.
UPS có 2 dòng chính là UPS offline và UPS online:
UPS offline:
Khi nguồn điện lưới còn đáp ứng được, nó sẽ được đưa thẳng tới thiết bị sử dụng.
Trường hợp có sự cố về nguồn điện lưới, bộ chuyển mạch sẽ chuyển sang chế độ dùng
acquy, dòng điện một chiều từ acquy sẽ được biến đổi thành dòng xoay chiều phù hợp
cho thiết bị sử dụng.
Ưu điểm: Giá thành rẻ, đơn giản, thích hợp cho các thiết bị công suất nhỏ độ nhạy cảm
về điện không cao.
Nhược điểm: Công suất nhỏ, không có chức năng ổn áp khi điện điện áp lưới thay đổi,
có thời gian chuyển mạch giữa các chế độ là từ 2-10ms nên không thích hợp với các
thiết bị nhạy cảm về điện .
Ngoài ra, còn có dòng UPS offline công nghệ Line interactive. Dòng này tiên tiến hơn
UPS offline thông thường nhờ có chức năng ổn áp và có thể được giám sát bằng máy
tính.
UPS online:
Là dòng cao cấp: Thường có công suất từ 1KVA trở lên. Không có thời gian chuyển
mạch (=0) giữa các chế độ, sóng ra luôn luôn là hình Sine (sine wave) chuẩn (kể cả chế
độ backup) và mức điện áp là 220V. Thường có kết nối máy tính, có chống sét lan
truyền, thường dùng cho thiết bị cao cấp hơn như Server, máy xét nghiệm, ATM, hệ

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 3 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
thống điều khiển,... Nếu cần thời gian lưu điện dài thì có thể dùng loại acquy ngoài
(dòng Offline không có khả năng này). Hệ số công suất thường là 0.7, có cổng kết nối
máy tính, quản lý bằng phần mềm... Và giá cũng đắt hơn.
Giới thiệu sơ lược về UPS online
Như đã nói ở trên, dòng UPS online không có thời gian chuyển mạch khi nối lưới và có
thể kết nối với acquy ngoài nên được sử dụng rất nhiều trong các thiết bị quân sự,
thông tin liên lạc, những thiết bị cần thời gian sử dụng lâu, không có thời gian trể.
Dưới đây là nguyên lý làm việc đơn giản của UPS online.
Lưu ý: Những ký hiệu trong sơ đồ có thể không quen thuộc đối với các bạn.
Hình 1.1 Sơ đồ đơn giản của UPS online (nguồn www.webdien.com)
Ở đây, chúng ta thấy rằng việc cung cấp điện cho thiết bị tiêu thụ là hoàn toàn liên tục
khi có sự cố về lưới điện. Hãy phân tích sơ dồ dưới góc độ người sử dụng như sau:
Nguồn điện lưới lúc này không cung cấp trực tiếp cho các thiết bị mà chúng được biến
đổi thành điện một chiều tương ứng với điện áp của acquy. Sơ đồ trên ta thấy được
rằng điện từ lưới thông qua bộ sạc (chargeur trên sơ đồ) biến đổi điện xoay chiều (AC)
thành điện một chiều (DC) nạp vào acquy (batterie) rồi qua bộ nghịch lưu (onduluer)
chuyển ngược lại thành điện xoay chiều phù hợp với điện áp của thiết bị sử dụng.

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 4 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Như vậy, có thể thấy rằng trong bất kỳ sự cố nào về lưới điện thì UPS online cũng có
thể cung cấp điện cho thiết bị sử dụng mà không có thời gian trễ nào. Điều này làm cho
các thiết bị an toàn và ổn định.
UPS online luôn ổn định điện áp đầu ra. Vì vậy không cần phải có một bộ ổn áp để bảo
vệ tránh hiện tượng quá điện áp cho thiết bị.
Phần tiếp theo chúng ta sẽ bàn về mạch nghịch lưu và nguyên lý hoạt động của mạch
nghịch lưu từ acquy dùng cầu H.
1.1.2 GIỚI THIỆU VỀ BỘ NGHỊCH LƯU Bộ nghịch lưu có nhiệm vụ chuyển đổi năng lượng từ nguồn điện một chiều không đổi
sang dạng năng lượng điện xoay chiều dể cung cấp cho tải xoay chiều. Đại lượng được
điều khiển ở ngõ ra là điện áp hoặc dòng điện. Tùy theo từng loại mà chúng ta có bộ
nghịch lưu áp hay bộ nghịch lưu dòng. Trong đề tài này, chúng ta giới hạn ở bộ nghịch
lưu áp.
Bộ nghịch lưu áp:
Bộ nghịch lưu áp cung cấp và điều khiển điện áp xoay chiều ở ngõ ra. Có ba loại
nghịch lưu áp dành cho từng loại tải tiêu thụ khác nhau.
a. Nghịch lưu áp 1 pha
Bộ nghịch lưu nguồn áp 1 pha dạng cầu (còn gọi là bộ nghịch lưu dạng chữ H) chứa 4
công tắc và 4 diod mắc đối song. (hình 1.2). Trong dạng này, trị trung bình áp tải phụ
thuộc vào thời gian đóng, ngắt các khóa trong mạch. Nhưng phải luôn lưu ý rằng các
cặp khóa S1, S3 và S2, S4 không được đóng đồng thời, nếu không sẽ gây ngắn mạch
nguồn gây nguy hiểm cho người và thiết bị.

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 5 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 1.2 Sơ đồ dạng nghịch lưu áp 1 pha dạng cầu
Ngoài ra, còn có bộ nghịch lưu 1 pha dạng nửa cầu có hoặc không có dùng máy biến áp
cách ly phía tải. Ở dạng này, điện áp tải lớn nhất chỉ bằng ½ điện áp nguồn một chiều.
Nhưng dạng này tiết kiệm được 2 khóa trong khi phải dùng 4 khóa như dạng cầu.
Hình 1.3 Sơ đồ bộ nghịch lưu áp 1 pha nửa cầu không có biến áp (a) có biến áp (b)
b. Nghịch lưu áp 3 pha
Bộ nghịch lưu áp 3 pha cấp cho tải 3 pha như động cơ không đồng bộ …Sơ đồ mạch
bộ nghịch lưu áp ba pha trên thực tế chỉ gặp ở dạng mạch cầu. Mạch chứa 6 công tắc

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 6 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
S1, S2, …S6 và 6 diod đối song D1, D2, …,D6. Tải 3 pha có thể mắc ở dạng hình sao hay
tam giác.
Hình 1.4 Sơ đồ mạch bộ nghịch lưu áp 3 pha
1.2 CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN BỘ NGHỊCH LƯU ÁP: Có nhiều loại điều khiển bộ nghịch lưu áp. Có thể kể đến như phương pháp điều khiển
theo biên độ, phương pháp điều chế độ rộng xung sin (Sin PWM), phương pháp điều
chế theo mẫu, phương pháp điều chế độ rộng xung tối ưu (optimum PWM), phương
pháp điều rộng, phương pháp điều chế vector không gian, …Các phương pháp trên
nhằm mục tiêu duy nhất là cho điện áp đầu ra có dạng càng gần sin càng tốt. Thông
thường dạng sóng tạo ra có 2 loại: tạo ra sóng sin mô phỏng và true sin (thuần sin).
Một sóng sin mô phỏng có dạng sóng gần với sóng vuông nhưng có giai đoạn chuyển
đổi nên gần với sóng hình sin. Hình dạng của các dạng sóng được vẽ trong Hình 1.5
dưới đây. Sóng sin mô phỏng có thể được tạo dể dàng bằng cách chuyển đổi bởi 3 mức
tần số xác định. Do đó, giá thành rẻ. Tuy nhiên không phải thiết bị nào cũng có thể sử
dụng loại nghịch lưu này.

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 7 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 1.5 Các dạng sóng: sin mô phỏng (MODIRED SINE WAVE), thuần sin (SINE
WAVE), xung vuông (SQUARE WAVE)
Để tạo ra dạng sóng true sin thì cũng có nhiều phương pháp. Tuy nhiên, trong đề tài
này ta chọn phương pháp điều chế độ rộng xung sin (Sin PWM) vì các ưu điểm của nó
như:
§ Tín hiệu ra gần đúng với tín hiệu sin chuẩn (true sin)
§ Lượng sóng hài bậc cao bị khử nhiều
§ Có thể kết hợp với vi điều khiển để đơn giản quá trình điều khiển
§ Giá thành không quá đắt
§ Giải thuật tính toán cũng không quá phức tạp
Điều biến độ rộng xung (Pusle Width Modulation - PWM)
Trong các bộ biến đổi nguồn và động cơ PWM được sử dụng một cách rộng rãi. Sự
thay đổi của độ rộng xung trong tín hiệu PWM được sử dụng để điều khiển tốc độ động
cơ và biến đổi nguồn. Tín hiệu PWM có thể được tạo ra khi sử dụng các bộ vi điều
khiển hoặc các bộ tạo tín hiệu chuyên dụng.

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 8 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Tín hiệu PWM tương tự sử dụng bộ so sánh hai tín hiệu vào, gồm tín hiệu chuẩn và tín
hiệu sóng mang để tạo ra tín hiệu dựa trên sự sai khác. Tín hiệu chuẩn phải có dạng sin
tần số cùng với tần số yêu cầu ở đầu ra, trong khi tín hiệu sóng mang ở dạng sóng răng
cưa hay tam giác và thường có tần số lớn hơn tần số chuẩn. Khi tín hiệu sóng mang lớn
hơn tín hiệu chuẩn, đầu ra của bộ so sánh ở trạng thái thứ nhất (mức thấp) còn ngược
lại đầu ra của bộ so sánh ở trạng thái thứ hai (mức cao).
Quy trình này được mô tả trong hình 1.6. Trong đó, tín hiệu sóng mang (xung tam
giác) có màu đỏ, tín hiệu sin chuẩn có màu đen. Sau khi qua bộ so sánh xuất ra tín hiệu
ở bên dưới để đóng ngắt các khóa trong bộ nghịch lưu (ở đây là các khóa trong mạch
cầu H sẽ được nói ở phần tiếp theo).
Hình 1.6 Sơ đồ cách tạo ra tín hiệu sin PWM

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 9 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Cần phải nói thêm rằng, trong thực tế ngày nay người ta thường dùng vi điều khiển để
tạo tín hiệu PWM thay cho cách trước đây là tạo ra sóng mang và sóng chuẩn rồi đem
so sánh với nhau. Sử dụng vi điều khiển có nhiều ưu điểm:
Độ ổn định cao, do mạch dao động của vi điều khiển sử dụng thạch anh.
Tần số tín hiệu PWM cao: có thể đạt tới vài MHz
Khả nănng điều khiển chính xác, sai số đầu ra có thể đạt đến 1%
Có thể cùng một lúc tạo nhiều tín hiệu PWM
Ngoài ra, ta còn có thể sử dụng các cổng còn lại của vi điều khiển để thực hiện các
chức năng khác như giám sát, điều khiển, hiển thị…
Để khuếch đại tín hiệu PWM để tránh nhiễu cho các khóa người ta thường sử dụng
transistor hoặc các linh kiện chuyển mạch khác (ở đây ta dùng IC ULN2804). Các cấu
hình cầu hoặc bán cầu đã được nói ở trên thường được sử dụng trong trường. Các cấu
hình cầu sử dụng 4 linh kiện chuyển mạch và thường được gọi là cầu H (H Brigde) do
hình dạng của nó.
1.3.MẠCH CẦU H Mạch cầu H là một mạch chuyển mạch tạo bởi 4 linh kiện sắp xếp theo hình chữ H.
Bằng cách điều khiển các công tắc trong mạch ta có thể tạo điện áp dương, âm và 0V
trên tải. Mạch cầu H cơ sở được thể hiện qua hình 1.7

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 10 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 1.7 Sơ đồ đơn giản của mạch cầu H sử dụng Mosfet làm công tắc [8]
Quan hệ giữa tình trạng hoạt động của các linh kiện trong mạch và điện áp trên tải
được mô tả trong bảng 1. Lưu ý là các trường hợp khác đã được loại trừ ví dụ ngắn
mạch.
Bảng 1.1 Sơ đồ trạng thái đóng ngắt các khóa trên mạch cầu H
Q1 Q2 Q3 Q4 Áp trên tải
Dẫn Tắt Tắt Dẫn Dương
Tắt Dẫn Dẫn Tắt Âm
Dẫn Dẫn Tắt Tắt 0V
Tắt Tắt Dẫn Dẫn 0V
1.4 CÁC BỘ LỌC TẦN SỐ Các bộ lọc có nhiều dạng với ưu-nhược điểm khác nhau. Ví dụ các bộ lọc số có cấu
hình đơn giản và có thể được thiết lập bất kỳ tần số nào. Nếu yêu cầu chỉ là lọc thông

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 11 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
thấp/cao/băng với tần số xác định, các bộ lọc tích cực dạng này có thông số kỹ thuật rất
cao và có suy hao không đáng kể. Các bộ lọc này thường được cấu tạo dựa trên các
khuếch đại thuật toán (Op-amp) hay các linh kiện lô-gic. Tuy nhiên, các bộ lọc này có
giá thành cao, và không có khả năng lọc tín hiệu điện áp cao. Để thực hiện lọc điện áp
cao trong các bộ nghịch lưu, người ta thường sử dụng các bộ lọc thụ động. Các bộ lọc
này có giá thành thấp và dễ triển khai trong thực tế.

CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN (UPS) VÀ MẠCH NGHỊCH LƯU CẦU H
GVHD: Th.s Tống Thanh Nhân Trang 12 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
1.5TÓM GỌN SƠ ĐỒ VÀ NGUYÊN LÝ VẬN HÀNH Sau đây là sơ đồ khối của bộ nghịch lưu dùng cầu H cho UPS online
Hình 1.9 Sơ đồ khối mạch nghịch lưu acquy dùng cầu H
TẢI MẠCH
BẢO VỆ
MẠCH LÁI MOSFET
VI ĐIỀU KHIỂN
MẠCH ĐO DÒNG VÀ ÁP
KHUẾCH ĐẠI
ACQUY
24V
BỘ LỌC TẦN SỐ THẤP
MẠCH CẦU H SỬ DỤNG IGBT
TẠO XUNG PWM
PHÓNG ĐIỆN
TÍN HIỆU HỒI TIẾP
ÁP ACQUY
ÁP TẢI
MẠCH
DC-DC
310V DC
CHUYỂN MẠCH
310V
DC
220V AC
310VDC
MẠCH NẠP
27,4V
NẠP DC

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 13 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
2.1Giới thiệu chung về acquy Acquy là nguồn năng lượng có tính thuận nghịch. Nó tích trữ năng lượng dưới dạng
hóa năng và giải phóng năng lượng dưới dạng điện năng. Dòng điện trong bình
acquy tạo ra do phản ứng điện phân giữa vật liệu trên bản cực và dung dịch H2SO4.
Hiện nay chúng ta có nhiều loại acquy, nhưng có 2 loại cơ bản là acquy axit và
acquy kiềm.
Bình acquy được làm từ nhiều tế bào acquy (cell), ta gọi đó là những acquy đơn,
được đặt trong 1 vỏ bọc bằng cao su cứng hay nhựa cứng.
Mỗi acquy đơn có điện thế khoảng 2V. Acquy 12V có 6 acquy đơn mắc nối tiếp.
Muốn có điện thế cao hơn ta mắc nối tiếp nhiều acquy lại với nhau.
Trên nắp mỗi acquy đơn có đặt nắp thông hơi, với mục đích:
· Để đậy kín acquy, khi cần thêm nước thì mở ra thêm nước vào.
· Khi nạp thì người ta mở nắp này để chất khí hình thành có khí thoát ra.
+ -
Hình 2.1. Cấu tạo acquy

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 14 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Dung dịch điện phân là H2SO4, nồng độ dung dịch có ảnh hưởng lớn đến sức điện
động của acquy, thể hiện trong sơ đồ sau:
Hình 2.2. Ảnh hưởng của nồng độ dd g tới điện trở và sức điện động
Thông thường nồng độ H2SO4 g = 1.1 – 1.3g/cm3
2.1.1Quá trình hóa học xảy ra trong acquy axit Trong acquy thường xảy ra hai quá trình hóa học thuận nghịch đặc trưng là quá
trình nạp và phóng điện.
− Khi nạp nhờ nguồn điện ở mạch ngoài mà các eletron chuyển động từ bản cực âm
đến bản cực dương, đây chính là dòng điện nạp In
− Khi phóng điện, dưới tác động của sức điện động acquy, các electron sẽ chuyển
động theo hướng ngược lại.
− Khi acquy đã nạp no, ở bản cực dương còn lại là PbO2, còn ở bản cực âm là chì
xốp Pb. Khi phóng hết điện, chất tác dụng ở 2 bản cực đêu trở thành PbSO4 ở dạng
tinh thể nhỏ.
− Quá trình hóa học (phản ứng điện phân) xảy ra trong acquy có thể viết vắn tắt như
sau:
Trên bản cực dương:

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 15 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
OHPbSOSOHPbONAP
PHÓNG
24422 +¾¾¾¬¾¾ ®¾
+
Trên bản cực âm:
44 PbSOSOPbNAP
PHÓNG
¾¾¾¬¾¾ ®¾
+ -
Tổng quát:
Bảng 2.1: quá trình chuyển đổi trong ac quy
Trạng thái Acquy
Cực dương Dung dịch điện phân Bản cực âm
Nạp no
E
Phóng điện hết
PbO2
E
PbSO4
H2SO4
E
H2O
Pb
E
PbSO4
Khi phóng điện, axit H2SO4 bị hấp thụ để tạo thành muốn sunfat, còn tạo ra nước,
do đó nồng độ dung dịch giảm đi. Khi nạp điện thì ngược lại, nhờ hấp thụ nước và
tái sinh ra axít H2SO4 nên nồng độ dung dịch tăng lên. Sự thay đổi nồng độ dung
dịch điện phân khi phóng và nạp là một trong những dấu hiệu xác định trạng thái
tích điện của acquy.
2.2 Các thông số cơ bản của acquy
2.2.1 Sức điện động: Sức điện động phụ thuộc nồng độ của dung dịch điện phân
E0 = 0.85 + γ (V)
Trong đó: E0: sức điện động của acquy đơn (V)
γ: nồng độ dung dịch điện phân (g/cm3)
Trong quá trình phóng điện, sức điện động của acquy được tính theo công thức:
Ep = Up + Ip.raq
Trong đó: Ep: sức điện động của acquy phóng điện.

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 16 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Up: điện áp đo trên các cực của acquy khi phóng điện
Ip: dòng điện phóng
raq : điện trở trong của acquy
Trong quá trình nạp điện, sức điện động En được tính:
En = Un – In.raq
Trong đó: En: sức điện động của acquy khi nạp điện
In: dòng điện nạp
Un: điện áp đo trên các cực của acquy khi nạp điện
Raq: điện trở trong của acquy
2.2.2Dung lượng phóng
Dung lượng phóng của acquy là đại lượng đánh giá khả năng cung cấp năng lượng
của acquy cho phụ tải, được tính theo công thức:
CP = IP.tP
Trong đó: CP: dung lượng thu được trong quá trình phóng điện (Ah)
IP: dòng điện phóng ổn định trong thời gian phóng điện tP
Đồ thị biểu thị sự phụ thuộc của dung lượng phóng và dòng điện sinh ra được:
Hình 2.3: biểu đồ dung lượng phóng

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 17 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
2.2.3 Dung lượng nạp Dung lượng nạp của acquy là đại lượng đánh giá khả năng tích trữ năng lượng của
acquy:
Cn = In.tn
Trong đó: Cn: dung lượng thu được trong quá trình nạp điện (Ah)
In: dòng điện nạp ổn định trong thời gian nạp tn
2.2.4 Đặc tính phóng của acquy
Đặc tính phóng của acquy là đồ thì biểu diễn quan hệ phụ thuộc của sức điện động,
điện áp acquy và nồng độ dung dịch điện phân theo thời gian phóng khi dòng điện
phóng không đổi.
Hình 2.4: đặc tính phóng của ac quy
Trong khoảng thời gian phóng từ tp = 0 đến tp = tgh, sức điện động, điện áp, nồng độ
dung dịch điện phân giảm dần. Tuy nhiên trong khoảng thời gian này độ dốc của
các đồ thì không lớn, ta gọi đó là giai đoạn phóng ổn định.

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 18 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Từ thời điểm tgh trở đi độ dốc các đồ thị thay đổi đột ngột. Nếu tiếp tục cho acquy
phóng điện sau tgh thì sức điện động, điện áp của acquy sẽ giảm rất nhanh; mặt
khác, các tinh thể PbSO4 tạo thành trong phản ứng sẽ có dạng thô, rắn rất khó hòa
tan (biến đổi hóa học) trong quá trình nạp điện trở lại cho acquy sau này. Như vậy
không nên để acquy tiếp tục phóng điện sau khoảng thời gian tgh này.
Sau khi ngắt mạch phóng một khoảng thời gian, các giá trị sức điện động, điện áp
acquy, nồng độ dung dịch điện phân lại tăng lên, ta gọi đây là thời gian hồi phục
hay khoảng nghỉ của acquy sau khi phóng.
2.2.5 Đặc tính nạp Đặc tính nạp của acquy là đồ thị biểu diễn quan hệ phụ thuộc của sức điện động,
điện áp acquy và nồng độ dung dịch điện phân theo thời gian nạp khi trị số dùng
điện nạp không đổi
Hình 2.5 : đặc tuyến nạp
Trong khoảng thời gian nạp từ t = 0 đến t = ts, sức điện động, điện áp, nồng độ dung
dịch điện phân tăng dần.
Tới thời điểm ts, trên bề mặt bản cực âm xuất hiện các bọt khí (còn gọi là hiện
tượng sôi), lúc này điện thế giữa các cực acquy đơn tăng đến 2.4V. Nếu vẫn tiếp tục
nạp, giá trị này nhanh chóng tăng tới 2.7V và vẫn giữ nguyên. Thời gian này gọi là
thời gian nạp no, có tác dụng làm cho các chất tác dụng ở sâu trong lòng bản cực

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 19 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
được biến đổi hoàn toàn, nhờ đó sẽ làm tăng thêm dung lượng phóng điện của
acquy.
Trong sử dụng thời gian nạp no cho acquy kéo dài từ 2 – 3h, trong suốt thời gian đó
hiệu điện thế trên các cực của acquy và nồng độ dung dịch điện phân không thay
đổi. Như vậy dung lượng thu được của acquy khi phóng điện luôn nhỏ hơn dung
lượng cần thiết để nạp no acquy.
Sau khi ngắt mạch nạp, điện áp, sức điện động của acquy, nồng độ dung dịch điện
phân giảm xuống và ổn định. Thời gian này cũng gọi là khoảng nghỉ của acquy sau
khi nạp.
Trị số dòng điện nạp ảnh hưởng rất lớn đến chất lượng và tuổi thọ của acquy. Dòng
điện nạp định mức đối với acquy quy định bằng 0.05Cn
2.2.6 Những dấu hiệu cho thấy acquy đã đầy điện
· Hiện tượng sủi bọt rất mạnh xảy ra xung quanh cực âm và cực dương
· Tỷ trọng chất điện phân so với nước đạt 1.12 – 1.22 đối với acquy cố định và
1.25 – 1.30 đối với acquy di động.
· Hiệu điện thế đạt 2.7 – 2.8 và ổn định trong suốt 3h
· Dung lượng nạp vào gấp 1.2 – 1.3 lần dung lượng định mức.
2.3 Tiêu chuẩn acquy: TCVN : 4472 : 93
Tiêu chuẩn này áp dụng cho các loại acquy chì dùng cho mục đích khởi động có
điện áp danh định 6V và 12V
− Bình acquy phải đảm bảo gắn kín, không thoát hơi ở quanh chân đầu điện
cực và quanh nắp, áp suất chân không trong bình 21 ± 1.33 Kpa (160 ± 10 mmHg)
− Khi đặt nghiêng bình acquy một góc 450 so với vị trí làm việc, điện dịch
không được chảy ra ngoài.
− Nhựa gắn kín nắp bình acquy phải đồng nhất, chịu được axit, không thấm
nước và chịu được sự thay đổi nhiệt độ từ (-30) ¸ 600C.

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 20 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
− Khả năng khởi động ban đầu: (chỉ áp dụng cho acquy tích điện
khô)Trong vòng 60 ngày kể từ ngày sản xuất, acquy phải đảm bảo được thông số
theo bảng 2.2
Bảng 2.2 Thông số ac quy
Acquy
tích
điện
khô
Dòng
điện
phóng
khởi
động
Ip, (A)
Thời gian tối
thiểu kết
thúc khởi
động (phút)
Điện áp đầu ra (V)
Sau 5 – 7s từ lúc
bắt đầu phóng Điện áp cuối
Loại
bình
6V
Loại
bình
12V
Loại
bình
6V
Loại
bình
12V
Trong
vòng
60
ngày
kể từ
khi sản
xuất
3C20 3 4 8 3 6
Chú thích: C20: dung lượng ở chế độ phóng nạp 20h
− Dung lượng danh định của acquy: Dung lượng được xác định theo chế độ phóng
điện 20 giờ với dòng điện liên tục không đổi Ip = 0.05C20 (A) và nhiệt độ điện dịch
được trước khi phóng không quá 320C. Bình acquy phải ngừng phóng điện khi điện
áp ở hai đầu điện cực giảm đến 5.25V (đối với bình 6V) và 10.5V (đối với bình
12V).
− Khả năng phóng điện khởi động của acquy

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 21 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Khả năng phóng điện khởi động được xác định bằng khả năng phóng điện ở chu kì
thứ 4 với dòng phóng Ip = 3C20 (A). Chỉ tiêu này để áp dụng cho acquy không thuộc
loại tích điện khô.Các thông số của acquy phải đạt như theo bảng 2.3
Bảng 2.3 Thông số yêu cầu của ac quy
Thời gian tối
thiểu kết
thúc khởi
động (phút)
Dòng điện
phóng khởi
động Ip,
(A)
Điện áp đầu ra (V)
Sau 5 – 7s từ
lúc bắt đầu
phóng
Điện áp cuối
Loại
bình
6V
Loại
bình
12V
Loại
bình
6V
Loại
bình
12V
5.5 3C20 4 8 3 6
− Khả năng nhận nạp điện: được xác định bằng dòng điện nạp. Bình acquy mới
chưa qua sữ dụng sau khi nạp no, phóng điện 5 giờ với Ip = 0.1C20 (A), sau đó nạp
với điện áp 7.2V (đối với bình 6V) và 14.4V (đối với bình 12V), trong 10 phút,
dòng điện nạp không nhỏ hơn 0.1C20 (A).
− Khả năng chịu được nạp quá áp của acquy: Bình acquy phải chịu được nạp quá
bằng dòng điện liên tục không đổi In = 0.1C20 (A) trong 100 giờ với 4 chu kỳ liên
tục. Sau mỗi chu kì nạp 100 giờ để hở mạch 68 giờ và phóng kiểm tra bằng dòng
điện Ip = 3C20 (A) ở nhiệt độ 40±30C để đến điện áp cuối của acquy theo bảng 2.3
thời gian phải đạt trên 4 phút.
− Tổn thất dung lượng (tự phóng) của bình acquy: tổn thất dung lượng so với
dung lượng danh định sau 14 ngày đêm không giảm quá 14%.

CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY
GVHD: Th.s Tống Thanh Nhân Trang 22 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
− Tuổi thọ của acquy (tính theo chu kỳ phóng nạp điện): Tuổi thọ acquy phải đạt
thấp nhất 240 chu kỳ theo phép thử quy định trong tiêu chuẩn này.
− Ghi nhãn: tên mỗi bình acquy phải ghi rõ và bền:
o Tên nhà máy sản xuất
o Dấu hiệu hàng hóa sản xuất
o Ký hiệu quy ước acquy; dung lượng danh định (Ah); điện áp (V)
o Ký hiệu đầu cực: cực dương “+” và âm “ ”
o Thời gian sản xuất
o Ký hiệu tiêu chuẩn này (TCVN:4472:93)

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 23 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SỐ LINH KIỆN KHÁC
3.1 Vi điều khiển pic 16F877a
Hình 3.1: Vi điều khiển PIC 16F877A
Đây là vi điều khiển thuộc họ 16Fxxx với tập lệnh gồm 35 lệnh có độ dài
14 bit. Mỗi lệnh được thực thi trong một chu kỳ xung clock. Tốc độ hoạt động tối
đa cho phép là 20MHz với một chu kỳ lệnh là 200ns. Bộ nhớ chương trình là
8Kx14bit, bộ nhớ dữ liệu là 368x8byte RAM và bộ nhớ dữ liệu EEPROM với dung
lượng 256x8byte. Số PORT I/O là 5 với 33 pin I/O.
Các đặc tính ngoại vi bao gồm các khối chức năng sau: Timer 0: bộ đếm 8
bit bộ chia tần 8 bit. Timer 1: bộ đếm 16 bit bộ chia tần số, có thể thực hiện chức
năng đếm dựa vào xung clock ngoại vi ngay khi vi điều khiển hoạt động ở chế độ
sleep. Timer 2: bộ đếm 8 bit bộ chia tần số, bộ postcaler. Hai bộ Capture/so
sánh/điều chế độ xung. Các chuẩn giao tiếp nối tiếp SPP (Synchronouns Serial
Port), SPI và I2C. Chuẩn giao tiếp nối tiếp USART với 9 bit địa chỉ. Cổng giao tiếp
song song PSP (Parallel Slave Port) với các chân điều khiển RD, WR, CS ở bên
ngoài.
Các đặc tính Analog: 8 kênh chuyển đổi ADC 10 bit, hai bộ so sánh.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 24 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Bên cạnh đó có vài đặc tính khác của vi điều khiển như: Bộ nhớ flash với khả
năng ghi xóa được 100.000 lần. Bộ nhớ EEPROM với khả năng ghi xóa được
1.000.000 lần. Dữ liệu bộ nhớ EEPROM có thể lưu trữ trên 40 năm. Khả năng tự
nạp chương trình với sự điều khiển của phần mềm. Nạp được chương trình ngay
trên mạch điện ICSP (In Cỉcuit Serial Programming) thông qua 2 chân. Watchdog
Timer với bộ dao động trong. Chức năng bảo mật mã chương trình. Chế độ Sleep,
có thể hoạt động nhiều dạng Oscillator khác nhau.
3.1.1 Sơ đồ khối vi điều khiển PIC 16F877A:
Hình 3.2: Sơ đồ khối vi điều khiển PIC16F877A

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 25 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
3.1.2 Tổ chức bộ nhớ: Hình3.3: Bộ nhớ chương trình
Bộ nhớ chương trình: Bộ nhớ chương trình của vi điều khiển PIC
16F877A là bộ nhớ flash, dung lượng bộ nhớ 8K word (1word =14 bit) và được
phân thành nhiều trang. Như vậy bộ nhớ chương trình có khả năng chứa được
8*1024=8192 lệnh. Để mã hóa được địa chỉ của 8K word bộ nhớ chương trình, bộ
đếm chương trình có dung lượng 13 bit (PC<12:0>). Khi vi điều khiển được reset,
bộ đếm sẽ chỉ địa chỉ 0000h (Resetvector). Khi ngắt xảy ra, bộ đếm chương trình sẽ
chỉ đến địa chỉ 0004h (Interrupvector). Bộ nhớ chương trình không bao gồm bộ nhớ
stack và không được địa chỉ hóa bới bộ đếm chương trình.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 26 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Bộ nhớ dữ liệu: bộ nhớ dữ liệu của PIC là bộ nhớ EEPROM được chia làm
nhiều bank. Đối với PIC 16F877A bộ nhớ dữ liệu chia làm 4 bank. Mỗi bank có
dung lượng 128 byte, bao gồm các thanh ghi có chức năng đặc biệt SFR (Special
Function Register) nằm ở các vùng địa chỉ thấp và các thanh ghi mục đích chung
GPR (General Purpose Register) nằm ở vùng địa chỉ còn lại của bank. Các thanh
ghi SFR thương xuyên được sử dụng sẽ được đặt ở tất cả các bank của bộ nhớ dữ
liệu giúp thuận tiện trong quá trình truy xuất và làm giảm bớt lệnh chương trình.
Hình 3.4: Sơ đồ bộ nhớ dữ liệu

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 27 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
3.1.3 Thanh ghi, Port :
Các thanh ghi chức năng đặc biệt:
Thanh ghi STATUS (03h,83h,103h,183h) :thanh ghi chứa kết quả thực hiện
phép toán của khối ALU, trạng thái reset và các bit chọn bank truy xuất trong bộ
nhớ dữ liệu.
Thanh ghi OPTION_REG (81h,181h) :thanh ghi này cho phép đọc, ghi và
điều khiển chức năng pull_up của các chân trong Port B, xác lập các tham số về
xung tác động của ngắt ngoại vi và bộ đếm Timer 0.
Thanh ghi INCON (0Bh,8Bh,10Bh,18Bh) :thanh ghi cho phép đọc, ghi, chứa
các bit điều khiển và các bit cờ hiệu khi timer 0 bị tràn, ngắt ngoại vi RB0/INT và
ngắt interrup_on_change tại các chân của Port B.
Thanh ghi PIE1 (8Ch) :chứa các bit điều khiển chi tiết các ngắt của khối
chức năng ngoại vi.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 28 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Thanh ghi PIR1 (0Ch) :chứa cờ ngắt của các khối chức năng ngoại vi, các
ngắt này được cho phép bởi các bit điều khiển chứa trong thanh ghi PIE1.
Thanh ghi PIE2 (8Dh) :chứa các bít điều khiển các ngắt của các khối chức
năng CCP2, SSP bus, ngắt của bộ so sánh và ngắt ghi vào bộ nhớ EEPROM.
Thanh ghi PIR2 (0Dh) : chứa cờ ngắt của các khối chức năng ngoại vi, các
ngắt này được cho phép bởi các bit điều khiển chứa trong thanh ghi PIE2.
Thanh ghi PCON (8Eh) :chứa các cờ hiệu cho biết trạng thái các chế độ reset
của vi điều khiển.
Các Port của Pic :

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 29 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
* PORTA :
PortA bao gồm 6 chân I/O, để là input thì ghi giá trị vào thanh ghi TrisA sẽ
quy định các chân của Port (nếu là 1 thì input, là 0 thì output). Riêng chân RA4
được tích hợp chức năng là chân cung cấp xung clock cho timer 0. Những chân
khác đa hợp với ngõ vào analog của ADC và chân vào điện thế so sánh của bộ so
sánh Comparator.
Các thanh ghi SFR liên quan đến PortA :
PortA (05h) :chứa các pin trong PortA.
TrisA (85h) :điều khiển xuất nhập.
Cmcon (9Ch) :thanh ghi điều khiển bộ so sánh.
Cvrcon (9Dh) : thanh ghi điều khiển bộ so sánh điện áp.
Adcon1 (9Fh) : thanh ghi điều khiển bộ ADC.
* PORTB :
PortB bao gồm 8 chân I/O, để là input thì ghi giá trị vào thanh ghi TrisB sẽ
quy định các chân của Port (nếu là 1 thì input, là 0 thì output). Một số chân sử dụng
trong quá trình nạp chương trình cho vi điều khiển. PortB liên quan tới ngắt ngoại vi
và bộ timer 0. PortB còn được tích hợp chức năng điện trở kéo lên được điều khiển
bởi chương trình.
Các thanh ghi SFR liên quan đến PortB :
PortB (06h, 106h) :chứa các pin trong PortB.
TrisB (86h, 186h) :điều khiển xuất nhập.
Option_reg (82h, 181h) :điều khiển ngắt ngoại vi và bộ timer 0.
* PORTC :
PortC bao gồm 8 chân I/O, để là input thì ghi giá trị vào thanh ghi TrisC sẽ
quy định các chân của Port (nếu là 1 thì input, là 0 thì output). PortC chứa các chân
chức năng của bộ so sánh, bộ timer 1, bộ PWM, các chuẩn giao tiếp nối tiếp I2C,
SPI, SSP, USART.
Các thanh ghi SFR liên quan đến PortC :
PortC (07h) :chứa các pin trong PortC.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 30 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
TrisB (87h) :điều khiển xuất nhập.
* PORTD :
PortD bao gồm 8 chân I/O, để là input thì ghi giá trị vào thanh ghi TrisD sẽ
quy định các chân của Port (nếu là 1 thì input, là 0 thì output). PortD còn là cổng
xuất dữ liệu của chuẩn giao tiếp PSP (Parallel Slave Port).
Các thanh ghi SFR liên quan đến PortD :
PortD (08h) :chứa các pin trong PortD.
TrisB (88h) :điều khiển xuất nhập.
* PORTE :
PortE bao gồm 3 chân I/O, để là input thì ghi giá trị vào thanh ghi TrisE sẽ
quy định các chân của Port (nếu là 1 thì input, là 0 thì output). PortE chứa các chân
ngõ vào analog, còn có các chân điều khiển chuẩn giao tiếp PSP (Parallel Slave
Port).
Các thanh ghi SFR liên quan đến PortE :
PortD (09h) :chứa các pin trong PortE.
TrisB (89h) :điều khiển xuất nhập và thiết lập thông số cho chuấn giao tiếp
PSP.
Adcon1 :thanh ghi điều khiển khối ADC
3.1.4 Giao tiếp nối tiếp - USART (Universal Synchronous Asynchronous Receiver Transmitter) là một
trong hai chuẩn giao tiếp nối tiếp.USART còn được gọi là giao diện giao tiếp nối
tiếp SCI
(Serial Communication Interface). Có thể sử dụng giao diện này cho các giao tiếp
với các
thiết bị ngoại vi, với các vi điều khiển khác hay với máy tính. Các dạng của giao
diện USART ngoại vi bao gồm:
Bất động bộ (Asynchronous).
Đồng bộ_ Master mode.
Đồng bộ_ Slave mode.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 31 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
PIC16F877A được tích hợp sẵn bộ tạo tốc độ baud BRG (Baud Rate Genetator) 8
bit dùng cho giao diện USART. BRG thực chất là một bộ đếm có thể được sử dụng
cho cả hai dạng đồng bộ và bất đồng bộ và được điều khiển bởi thanh ghi PSBRG.
Ở dạng bất đồng bộ, BRG còn được điều khiển bởi bit BRGH ( TXSTA<2>). Ở
dạng đồng bộ tác động của bit BRGH được bỏ qua. Tốc độ baud do BRG tạo ra
được tính theo công thức sau:
Trong đó X là giá trị của thanh ghi RSBRG ( X là số nguyên và 0<X<255).
Các thanh ghi liên quan đến BRG bao gồm:
TXSTA (địa chỉ 98h): chọn chế độ đòng bộ hay bất đồng bộ ( bit SYNC) và chọn
mức
tốc độ baud (bit BRGH).
RCSTA (địa chỉ 18h): cho phép hoạt động cổng nối tiếp (bit SPEN).
RSBRG (địa chỉ 99h): quyết định tốc độ baud.
- USART bất đồng bộ: Ở chế độ truyền này USART hoạt động theo chuẩn NRZ
(None-Return-to-Zero), nghĩa là các bit truyền đi sẽ bao gồm 1 bit Start, 8 hay 9 bit
dữ liệu (thông thường là 8 bit) và 1 bit Stop. Bit LSB sẽ được truyền đi trước. Các
khối truyền và nhận data độc lập với nhau sẽ dùng chung tần số tương ứng với tốc
độ baud cho quá trình dịch dữ liệu (tốc độ baud gấp 16 hay 64 lần tốc độ dịch dữ
liệu tùy theo giá trị của bit BRGH), và để đảm bảo tính hiệu quả của dữ liệu thì hai
khối truyền và nhận phải dùng chung một định dạng dữ liệu.
Các thanh ghi liên quan đến quá trình truyền dữ liệu bằng giao diện USART bất
đồng bộ:
Thanh ghi INTCON (địa chỉ 0Bh, 8Bh, 10Bh, 18Bh): cho phép tất cả các ngắt.
Thanh ghi PIR1 (địa chỉ 0Ch): chứa cờ hiệu TXIF.
Thanh ghi PIE1 (địa chỉ 8Ch): chứa bit cho phép ngắt truyền TXIE.
Thanh ghi RCSTA (địa chỉ 18h): chứa bit cho phép cổng truyền dữ liệu (hai pin

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 32 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
RC6/TX/CK và RC7/RX/DT).
Thanh ghi TXREG (địa chỉ 19h): thanh ghi chứa dữ liệu cần truyền.
Thanh ghi TXSTA (địa chỉ 98h): xác lập các thông số cho giao diện.
Thanh ghi SPBRG (địa chỉ 99h): quyết định tốc độ baud.
- USART đồng bộ:
Giao diện USART đồng bộ được kích hoạt bằng cách set bit SYNC. Cổng giao tiếp
nối tiếp vẫn là hai chân RC7/RX/DT, RC6/TX/CK và được cho phép bằng cách set
bit SPEN. USART cho phép hai chế độ truyền nhận dữ liệu là Master mode và
Slave mode. Master mode được kích hoạt bằng cách set bit CSRC (TXSTA<7>),
Slave mode được kích hoạt bằng cách clear bit CSRC. Điểm khác biệt duy nhất
giữa hai chế độ này là Master mode sẽ lấy xung clock đồng bộ từ bộ tao xung baud
BRG còn Slave mode lấy xung clock đồng bộ từ bên ngoài qua chân RC6/TX/CK.
Điều này cho phép Slave mode hoạt động ngay cả khi vi điều khiển đang ở chế độ
sleep.
Các thanh ghi liên quan đến quá trình truyền dữ liệu bằng giao diện USART đồng
bộ Master mode:
Thanh ghi INTCON (địa chỉ 0Bh, 8Bh, 10Bh, 18Bh): cho phép tất cả các ngắt.
Thanh ghi PIR1 (địa chỉ 0Ch): chứa cờ hiệu TXIF.
Thanh ghi PIE1 (địa chỉ 8Ch): chứa bit cho phép ngắt truyền TXIE.
Thanh ghi RCSTA (địa chỉ 18h): chứa bit cho phép cổng truyền dữ liệu (hai pin
RC6/TX/CK và RC7/RX/DT).
Thanh ghi TXREG (địa chỉ 19h): thanh ghi chứa dữ liệu cần truyền.
Thanh ghi TXSTA (địa chỉ 98h): xác lập các thông số cho giao diện.
Thanh ghi SPBRG (địa chỉ 99h): quyết định tốc độ baud.
Cổng giao tiếp song song psp (parallel slave port)
Ngoài các cổng nối tiếp và các giao điện nối tiếp được trình bày ở phần trên, vi điều
khiển pic16F877A còn được hỗ trợ một cổng giao tiếp song song và chuẩn giao tiếp
song song thông qua portd và porte. do cổng song song chỉ hoạt động ở chế độ slave
mode nên vi điều khiển khi giao tiếp qua giao diện này sẽ chịu sự điều khiển của

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 33 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
thiết bị bên ngoài thông qua các pin của porte, trong khi dữ liệu sẽ được đọc hoặc
ghi theo dạng bất đồng bộ thông qua 8 pin của portd.
- Các thanh ghi liên quan đến psp bao gồm:
thanh ghi portd (địa chỉ 08h): chứa dữ liệu cần đọc hoặc ghi.
thanh ghi porte (địa chỉ 09h): chứa giá trị các pin porte.
thanh ghi trise (địa chỉ 89h): chứa các bit điều khiển porte và psp.
thanh ghi pir1 (địa chỉ 0ch): chứa cờ ngắt pspif.
thanh ghi pie1 (địa chỉ 8ch): chứa bit cho phép ngắt psp.
thanh ghi adcon1 (địa chỉ 9fh): điều khiển khối adc tại porte.
Các đặc tính của Oscillator
Pic16F877A có khả năng sử dụng một trong 4 loại oscillator, đó là:
LP: (low power crystal).
XT: thạch anh bình thường.
HS: (high-speed crystal).
RC: (resistor/capacitor) dao động do mạch rc tạo ra. đối với các loại oscillator lp,
hs, xt, Oscillator được gắn vào vi điều khiển thông
qua các pin osc1/clki và Osc2/Clko.
đối với các ứng dụng không cần các loại oscillator tốc độ cao, ta có thể sử dụng
mạch dao động rc làm nguồn cung cấp xung hoạt động cho vi vi điều khiển. tần số
tạo ra phụ thuộc vào các giá trị điện áp, giá trị điện trở và tụ điện, bên cạnh đó là sự
ảnh hưởng của các yếu tố như nhiệt độ, chất lượng của các linh kiện.
các linh kiện sử dụng cho mạch rc oscillator phải bảo đảm các giá trị sau:
3 k < rext < 100 k
cext >20 pf
3.1.5 Các chế độ Reset
Có nhiều chế độ reset vi điều khiển, bao gồm:
Power-on Reset POR (Reset khi cấp nguồn hoạt động cho vi điều khiển).
Reset trong quá trình hoạt động.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 34 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Từ chế độ sleep.
WDT reset (reset do khối WDT tạo ra trong quá trình hoạt động).
WDT wake up từ chế độ sleep.
Brown-out reset (BOR).
- Power-on reset (POR): Đây là xung reset do vi điều khiển tạo ra khi phát hiện
nguồn cung cấp VDD. Khi hoạt động ở chế độ bình thường, vi điều khiển cần được
đảm bảo các thông số về dòng điện, điện áp để hoạt động bình thường. Nhưng nếu
các tham số này không được đảm bảo, xung reset do POR tạo ra sẽ đưa vi điều
khiển về trạng thái reset và chỉ tiếp tục hoạt động khi nào các tham số trên được
đảm bảo.
- Power-up Timer (PWRT): đây là bộ định thời hoạt động dựa vào mạch RC bên
trong
vi điều khiển. Khi PWRT được kích hoạt, vi điều khiển sẽ được đưa về trạng thái
reset.
PWRT sẽ tạo ra một khoảng thời gian delay (khoảng 72 ms) để VDD tăng đến giá
trị thích
hợp.
- Oscillator Start-up Timer (OST): OST cung cấp một khoảng thời gian delay bằng
1024 chu kì xung của oscillator sau khi PWRT ngưng tác động (vi điều khiển đã đủ
điều kiện hoạt động) để đảm bảo sự ổn định của xung do oscillator phát ra. Tác
động của OST còn xảy ra đối với POR reset và khi vi điều khiển được đánh thức từ
chế đợ sleep. OST chỉ tác động đối với các lọai oscillator là XT, HS và LP.
- Brown-out reset (BOR): Nếu VDD hạ xuống thấp hơn giá trị VBOR (khoảng 4V)
và kéo dài trong khoảng thời gian lớn hơn TBOR (khoảng 100 us), BOR được kích
hoạt và vi điều khiển được đưa về trạng thái BOR reset. Nếu điện áp cung cấp cho
vi điều khiển hạ xuống thấp hơn VBOR trong khoảng thời gian ngắn hơn TBOR, vi
điều khiển sẽ không được reset. Khi điện áp cung cấp đủ cho vi điều khiển hoạt
động, PWRT được kích hoạt để tạo ra một khoảng thời gian delay (khoảng 72ms).
Nếu trong khoảng thời gian này điện áp cung cấp cho vi điều khiển lại tiếp tục hạ

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 35 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
xuống dưới mức điện áp VBOR, BOR reset sẽ lại được kích hoạt khi vi điều khiển
đủ điện áp hoạt động. Một điểm cần chú ý là khi BOR reset được cho phép, PWRT
cũng sẽ hoạt động bất chấp trạng thái của bit PWRT.
- Tóm lại để vi điều khiển hoạt động được từ khi cấp nguồn cần trải qua các bước
sau: POR tác động.
PWRT (nếu được cho phép hoạt động) tạo ra khoảng thời gian delay TPWRT để ổn
định nguồn cung cấp.
OST (nếu được cho phép) tạo ra khoảng thời gian delay bằng 1024 chu kì xung của
oscillator để ổn định tần số của oscillator.
Đến thời điểm này vi điều khiển mới bắt đầu hoạt động bình thường. Thanh ghi
điều khiển và chỉ thị trạng thái nguồn cung cấp cho vi điều khiển là thanh ghi
PCON
Hình 18 : sơ đồ các chế độ reset của pic 16f877a
3.1.6 Ngắt PIC16F877A có đến 15 nguồn tạo ra hoạt động ngắt được điều khiển bởi thanh ghi
INTCON (bit GIE). Bên cạnh đó mỗi ngắt còn có một bit điều khiển và cờ ngắt

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 36 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
riêng. Các cờ ngắt vẫn được set bình thường khi thỏa mãn điều kiện ngắt xảy ra bất
chấp trạng thái của bit GIE, tuy nhiên hoạt động ngắt vẫn phụ thuôc vào bit GIE và
các bit điều khiển khác. Bit điều khiển ngắt RB0/INT và TMR0 nằm trong thanh
ghi INTCON, thanh ghi này còn chứa bit cho phép các ngắt ngoại vi PEIE. Bit điều
khiển các ngắt nằm trong thanh ghi PIE1 và PIE2. Cờ ngắt của các ngắt nằm trong
thanh ghi PIR1 và PIR2.
Trong một thời điểm chỉ có một chương trình ngắt được thực thi, chương trình ngắt
được kết thúc bằng lệnh RETFIE. Khi chương trình ngắt được thực thi, bit GIE tự
động được xóa, địa chỉ lệnh tiếp theo của chương trình chính được cất vào trong bộ
nhớ Stack và bộ đếm chương trình sẽ chỉ đến địa chỉ 0004h. Lệnh RETFIE được
dùng để thoát khỏi chương trình ngắt và quay trở về chương trình chính, đồng thời
bit GIE cũng sẽ được set để cho phép các ngắt hoạt động trở lại. Các cờ hiệu được
dùng để kiểm tra ngắt nào đang xảy ra và phải được xóa bằng chương trình trước
khi cho phép ngắt tiếp tục hoạt động trở lại để ta có thể phát hiện được thời điểm
tiếp theo mà ngắt xảy ra.
Đối với các ngắt ngoại vi như ngắt từ chân INT hay ngắt từ sự thay đổi trạng thái
các pin của PORTB (PORTB Interrupt on change), việc xác định ngắt nào xảy ra
cần 3 hoặc 4 chu kì lệnh tùy thuộc vào thời điểm xảy ra ngắt.
Cần chú ý là trong quá trình thực thi ngắt, chỉ có giá trị của bộ đếm chương trình
được cất vào trong Stack, trong khi một số thanh ghi quan trọng sẽ không được cất
và có thể bị thay đổi giá trị trong quá trình thực thi chương trình ngắt. Điều này nên
được xử lí bằng chương trình để tránh hiện tượng trên xảy ra.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 37 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 19:Sơ đồ logic của tất cả các ngắt trong vi điều khiển PIC16F877A.
3.2 GIỚI THIỆU LCD Trên thị trường hiện nay loại LCD phổ biến là loại LCD 2 dòng x 16 kí tự LCD TC-1602A gồm có 2 dòng x 16 kí tự, sử dụng chíp KS006U của Samsung. Ngoài ra, còn có một số loại khác như LCD sử dụng chíp HD44780 của Hitachi chúng cũng tương tự nhau. LCD là một thiết bị ngoại vi có thể xuất ( để hiển thị ), nhập ( đọc giá trị từ LCD về ). Giới thiệu LCD
3.2.1 Tổng quan: Mặt hiển thị tinh thể lỏng còn gọi là LCD (Liquid Crystal Display)
Với đặc điểm là tiêu thụ năng lượng ít nên được dùng khá phổ biến để hiển
thị các thông tin của người dùng và truyền thông.
Với các hiển thị sử dụng dòng điện chạy qua mối nối diode P-N phân cực
thuận tạo ra ánh sáng, còn màu sắc tuỳ vào chất bán dẫn cấu tạo nên diode. Tuy
dòng điện chỉ là 5-20 mA nhưng hiệu điện thế giảm qua diode lại đáng kể (1.8-2,2

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 38 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
V) nên công suất tiêu thụ cuả 1 led từ 10-30 mW. Con số này không lớn nhưng nếu
ta sử dụng một hệ thống hiển thị cần nhiều led thì điều này rất đáng kể, nhất là đối
với các hệ thống có sử dụng nguồn dự phòng.
Sử dụng LCD hiện nay rất phổ biến, nhất là phù hợp với nhiều ứng dụng cần công
suất tiêu thụ thật thấp như đồng hồ đeo tay, máy tính bỏ túi…
Hơn nữa, vì mỗi led chỉ cho một điểm sáng hay một đoạn sáng nên không thể dùng
led để hiển thị các nội dung phức tạp, linh hoạt được như ở các máy đọc đĩa, dàn
ampli hifi hiện đại hay các máy đo vừa hiển thị dạng số hay tương tự, LCD còn có
khả năng hiển thị các biểu tượng, ký hiệu linh hoạt.
Tuy không thể thay thế được led nhưng LCD có ưu thế vượt trội led bởi hai
khả năng trên: Công suất tiêu tán rất thấp và hiển thị phức tạp, linh hoạt.
3.2.2 Nguyên lý hoạt động:
LCD cung cấp tính linh hoạt tối ưu trong việc định dạng dữ liệu hiển thị.
Chúng cho phép ký tự, hình vẽ hoặc kết hợp cả hai. Khi cỡ chữ được xác định bằng
phần mềm, chúng cho phép mọi ngôn ngữ hoặc font ký tự hiển thị. Điều giới hạn
duy nhất là độ phân giải.
LCD được tổ chức theo những hàng (horizontal) và cột (vertical) của điểm
ảnh( pixels). Mỗi pixel được định địa chỉ riêng lẻ, cho phép mọi sự kết hợp. Hình
ảnh này cung cấp cho người sử dụng khả năng cấu trúc của bất cứ cỡ hoặc hình
dạng text

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 39 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Các hình trên chỉ ra cấu trúc của một LCD. Một lớp tinh thể lỏng được đặt
xen giữa hai lớp nền thuỷ tinh, một lớp có các điện cực thanh(segment electrodes
:SEG1, SEG2, và hơn nữa), lớp còn lại có các điện cực chung( common electrodes
(COM1, COM2, và hơn nữa). Mỗi giao điểm của một thanh và điện cực chung thì
hiển thị một điểm ảnh.
LCD được điều khiển như sau: Điện cực chung được lựa chọn liên tục. Các
điểm ảnh trên điện cực được lựa chọn thì có thể mở hoặc tắt tín hiệu lựa chọn/không
lựa chọn của thanh điện cực tương ứng. Điều này được gọi là điều khiển kép.
Các bộ lái LCD được phân thành hai loại: bộ lái chung và bộ lái các thanh.
Bộ lái chung lái các điện cực chung, và bộ lái thanh các điện cực thanh.
MPU Display
information
LCD Driver
LCD
LCD driver

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 40 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
3.2.3. Bộ điều khiển LCD:
Bộ xử lý trung tâm MPU không thể giao tiếp trực tiếp với bộ lái LCD. Vì
vậy bộ điều khiển LCD được đặt giữa bộ xử lý và bộ lái LCD để điều khiển giao
tiếp giữa chúng.
Bộ điều khiển LCD nhận thông tin hiển thị từ MPU, chuyển chúng thành tín
hiệu điều hoà hiển thị và yêu cầu các bộ lái LCD hiển thị, và chuyển chúng cho các
bộ lái LCD.
3.2.4. Nguyên tắc điều khiển:
MPU LCD Controller
LCD Driver
LCD
Display Display information

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 41 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Có 4 tín hiệu thời gian hiển thị: Hiển thị xung dịch dữ liệu, tín hiệu chốt, tín
hiệu bắt đầu khung, và tín hiệu chuyển đổi AC. Có hai dạng cho việc truyền tín hiệu
hiển thị: truyền nối tiếp và truyền song song. Trong truyền nối tiếp, dữ liệu được
truyền từng bit. Trong truyền song song, 4 hoặc 8 bit được truyền đồng thời.
1.5. Hiển thị dữ liệu trên RAM:
RAM hiển thị dữ liệu chứa thông tin hiển thị gởi từ MPU. Bộ điều khiển
LCD đọc dữ liệu từ RAM hiển thị và chuyyển dữ liệu đó đến các bộ lái LCD. Một
số bộ điều khiển LCD để cho MPU giao tiếp trực tiếp với RAM hiển thị dữ liệu
được chỉ ra như hình trên.
MPU
LCD Controller
Display data RAM
Display data
Display data
LCD Driver
LCD

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 42 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Một trong các phương pháp để thể hiện nội dung dữ liệu hiển thị là chỉ định
hiển thị các bit dữ liệu để hiển thị các điểm ảnh. Trong trường hợp này, nếu MPU
ghi và lưu trữ dữ liệu “11110000” tại địa chỉ 0 cuả RAM hiển thị dữ liệu, màn
hình LCD hiển thị một mẩu cuả tùy theo mức 0 hay 1
cuả dữ liệu. Kiểu giao tiếp này được gọi là chế độ hiển thị sinh động. Chế độ hiển
thị sinh động cho phép mọi kiểu mẫu có thể hiển thị, bởi vì mỗi điểm ảnh hiển thị
có thể mở hoặc tắt độc lập nhau.
3.2.6. Cấu trúc:
Các bộ hiển thị LCD trên thị trường có nhiều khuôn mẫu khác nhau, thường
gặp là các loại 1x16 (tương ứng với 1 hàng * 16 ký tự), 2x16 (tương ứng với 2 hàng
* 16 ký tự), 1x40 (tương ứng với 1 hàng * 40 ký tự)…
Thường LCD có 16 chân(thêm 2 chân nữa là backlight anode và backlight
cathode).
Các mô đun LCD có một giao diện 8 bit. Bên cạnh bus dữ liệu 8 bit, giao
diện còn có một số các đường dẫn điều khiển khác. Việc truyền dữ liệu mặc định
giữa mô đun LCD và một linh kiện bên ngoài là 8 bit, tuy nhiên vẫn có khả năng
tiến hành truyền thông với mô đun LCD bằng cách chỉ sử dụng 4 trong số 8 đường
dẫn dữ liệu.
-Chức năng các chân của LCD:

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 43 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
TC802A
UL1
LCD Display
789
1011121314
1
2
3
4 5 6
15
16
D0D1D2D3D4D5D6D7
Vss
Vcc
V0
RS R/W
E
Led-
Led+
D0-D7:8 đường dữ liệu
RS:chọn thanh ghi điều khiển hay thanh ghi dữ liệu
RS = 0: Chọn thanh ghi điều khiển
RS = 1: Chọn thanh ghi dữ liệu
R/W\: Chọn chế độ đọc hay ghi
R/W\ = 0: Chọn chế độ đọc
R/W\ = 1: Chọn chế độ ghi
E: Cho phép đọc hoặc ghi
E = 1 :cho phép
E = 0:Không cho phép
Vdd(Vcc): nguồn cung cấp = 5VDC
VSS = 0 VDC
VD(VEE): Điều chỉnh độ tương phản
A(led+): Cực dương cuả đèn led màn hình
K(led-): Cực âm cuả đèn led màn hình.
Chân số 3 nếu nối với biến trở sẽ cho phép điều chỉnh độ tương phản (Contrast) của
LCD.

CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SÓ LINH KIỆN KHÁC
GVHD: Th.s Tống Thanh Nhân Trang 44 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình minh hoạ: một LCD 2x16 trên thực tế và bảng chức năng các chân

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 45 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
4.1 Giới thiệu về IGBT
IGBT là BJT có cực điều khiển cách ly.Đây là linh kiện kết hợp khả năng đóng
ngắt nhanh của Mosfet và khả năng chịu tải lớn của BJT. IGBT có khả năng chịu
được áp và dòng lớn cũng như tạo nên độ sụt áp vừa phải khi dẫn điện. IGBT có
phần tử MOS với cổng cách điện được tích hợp trong các cấu trúc của nó.Việc điều
khiển đóng và ngắt IGBT được thực hiện nhờ phần tử MOSFET đấu nối giữa hai
cực của transistor NPN.
Hình 4.1 : Mạch tương đương và cấu tạo IGBT

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 46 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 4.2 : ký hiệu IGBT
Khi tác dụng lên G một điện thế dương so với chân emitter để kích đóng IGBT, các
hạt mang điện các hạt mang điện loại n được kéo về kênh p gần cổng làm giàu điện
tích mạch cổng p của transistor npn và làm cho transistor này dẫn điện. Việc ngắt
IGBT có thể thực hiện bằng cách khóa điện kích để ngắt kênh dẫn p.
Hình 4.3 Đặc tuyến V-A của IGBT
Ưu điểm: IGBT có khả năng đóng ngắt nhanh nên thường đuợc sử dụng trong các bộ biến đổi điều chế độ rộng xung tần số cao. IGBT có đô sụt áp khi dẫn điện lớn hơn so với các linh kiện thuộc dạng thyristor như GTO. Tuy nhiên IGBT chiếm vị trí quan trọng trong công nghiệp với hoạt động trong phạm vi công suất đến 10MW hoặc cao hơn nữa.Thới gian đóng ngắt của IGBT rất nhanh khoảng vài us và khả năng chịu tải đến 4,5KV- 2.000A.
Vì IGBT đóng ngắt rất nhanh gây quá áp trên collecter,emitter lập tức đánh
thủng phần tử.Có thể ngăn chặn hậu quả của việc tắt dòng đột ngột bằng cách sử
dụng mạch RC (snubber ) mắc song song với các phần tử.
IGBT có một tụ kí sinh giữa cực G và cực E, khi thiết kế mạch cần lưu ý đến
vấn đề này vì khi kích một điện áp vào cực G sau đó ngưng kích thì IGBT không
tắt mà vẫn dẫn một thời gian cho đến khi hết điện áp trên tụ kí sinh. Khi bị dẫn như
vậy sẽ làm giảm tốc độ đóng ngắt của IGBT và điều khiển không như ý muốn. Để

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 47 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
khắp phục người ta mắc thêm điện trở từ G xuống E, điện trở này có giá trị trong
khoảng 1k đến 100k sao cho đảm bảo IGBT đóng ngắt nhanh mà không bị sụt áp
trên mạch kích.
Để tăng tốc độ ngắt của IGBT người ta thường dung phương pháp khóa bằng cách
kích điện áp âm và G-E trong chu kỳ ngắt, làm như vậy đảm bảo IGBT xả hoàn
toàn tụ ký sinh và không bị nhiễu áp gây dẫn không như mong muốn.
Trong mạch sử dụng IGBT FGA25N120ANTD hoạt động được ở Ic = 50A (với nhiệt độ 25 độ C) . Có Vce bão hòa là 2V. Áp kích Vge là ± 20V.
Hình 4.4 Thông số 25N120

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 48 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
4.2 Giới thiệu về ic opto tổ hợp TLP250: TLP250 là một opto tổ hợp với một mạch khuếch đại bên trong, về cấu tạo
phần cách ly quang gồm một led phát đặt đối diện với 1 photo diode làm phần thu,
photo diode này được mắc vào 2 ngõ vào của một opamp, tùy theo trạng thái của
photo diode mà opamp này bão hào âm hay dương. Ngõ ra của opamp kích vào 2
transistor làm nhiệm vụ khuếch đại.
Hình 4.5 : Cấu tạo opto TLP250
Ưu điểm của TLP250 so với các loại opto thông thường là khả năng đóng
ngắt nhanh do tín hiệu dược so sánh bằng opamp, ngõ ra opto luôn trong trạng thái
bão hòa âm hoặc bão hòa dương.
Nhược điểm là cần một nguồn nuôi Vcc thích hợp để IC hoạt động, vấn đề
này gây khó khăn trong việc thiết kế các mạch driver cho IGBT hoặc most fet.

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 49 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 4.6 : Thông số của opto TLP250
Do các ưu điểm nổi trội hơn opto thông thường nên TLP250 thường được
ứng dụng rộng rãi trong các mạch điều chế độ rộng xung PWM với tần số cao.
Trong phần tiếp theo chúng ta sẽ tìm hiểu về IC điều chế độ rộng xung.
4.3 IC điều chế độ rộng xung SG3525 SG3525 là IC dao động với 2 ngõ ra Q+ và Q- đối ngược nhau. IC thường được kết
hợp với mạch RC bên ngoài để cho ra tần số dao động thích hợp. Ngoài ra khả năng
vượt trội của SG3525 so với các loại IC khác là có thể dò áp hồi tiếp về để điề chế
độ rộng xung thích hợp.

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 50 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 4.7 : sơ đồ khối bên trong SG3525
Tần số xung ra của IC rất rộng, trong khoảng 100Hz đến 400KHz. Dòng ngõ ra có
thể đạt 500mA.

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 51 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 4.8 : Thông số của SG3525
IC SG3525 thường được sử dụng để tao dao động cho các mạch inverter dùng biến
áp xung với tần số cao, trong phần tiếp theo chúng ta sẽ tìm hiểu về biến áp xung.
4.4 Biến áp xung
Biến áp xung cũng giống như biến áp thường gồm hai cuộn dây Sơ cấp và thứ
cấp (Cuộn thứ cấp có thể có nhiều ngõ ra). Lõi của biến áp xung là lõi Ferrite, chính
vì thế mà biến áp xung có thể hoạt động ở tần số cao hàng trăm Khz ,hiệu suất cao
hơn so với biến áp thường. Nhờ khả năng dẫn từ tốt và không dẫn điện của lõi mà
biến áp xung có thể làm việc ở tần số cao mà không bị tác động của dòng fuco

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 52 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Hình 4.7: Lõi ferrit
Hình 4.8 : Biến áp xung
Nếu đặt một điện áp vào một cuộn cảm,sẽ xuất hiện một dòng điện chạy qua cuộn
cảm(cường độ dòng điện biến đổi theo thời gian).
Chú ý: Dòng điện chạy trong cuộn cảm thay đổi theo thời gian thậm chí là khi
điện áp đặt lên nó là không đổi.
Hay nói một cách khác là nếu một dòng điện thay đổi liên tục sẽ sinh ra trên
hai đầu cuộn cảm một điện áp nào đó.

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG
GVHD: Th.s Tống Thanh Nhân Trang 53 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
Một định luật cơ bản đã đưa ra quan hệ giữa điện áp và dòng điện trong cuộn
cảm bằng công thức sau:
V=L.di/dt
Hai đặc tính quan trọng của cuộn cảm theo như định luật đó là:
Điện áp sinh ra trên cuộn cảm chỉ do sự thay đổi của dòng điện chạy
trong cuộn cảm đó. Một dòng điện ổn định(DC) qua cuộn cảm sẽ không
sinh ra điện áp nào ở hai đầu cuộn cảm cả.
Dòng điện chạy qua cuộn cảm không thể thay đổi giá trị đột ngột được.
Dòng điện thay đổi càng nhanh thì điện áp sinh ra ở trên hai đầu cuộn
cảm càng lớn.
Tham số quan trọng là : di/dt thể hiện mức độ thay đổi của dòng điện theo thời
gian .
Để tạo ra dòng điện biến thiên trên cuộn dây nguời ta thường dùng phương
pháp điều chế độ rộng xung PWM, hoặc sử dụng công tắc điện tử ( BJT
,Fet,IGBT… ) để đóng mở liên tục.
Sau khi tìm hiểu về một số linh kiện chính trong mạch chúng ta sẽ tiến hành thiết
kế mạch.

CHƯƠNG 5: THIẾT KẾ VÀ THI CÔNG MẠCH UPS
GVHD: Th.s Tống Thanh Nhân Trang 54 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG 5: THIẾT KẾ VÀ THI CÔNG MẠCH UPS Trong chương này sẽ trình bày phần cứng của đề tài . Các mạch bao gồm :
- Mạch DC – DC chuyển đổi điện áp DC 24V lên điện áp DC 310v.
- Mạch DC – AC chuyển đổi điện áp DC 310v thành điện áp AC 220v .
- Mạch chuyển tiếp , chuyển từ chế độ điện lưới sang điện ac quy.
- Mạch đo điện áp ngõ ra và điện áp ac quy.
220vac 310vdc 220vac 310vdc 27,4vdc Hình 5.1: Sơ đồ khối UPS online
Điện lưới 220v AC
Mạch cầu diode
Chuyển mạch
AC quy Mạch nạp ac quy
Mạch DC - DC
Mạch bảo vệ
Mạch DC - AC
Mạch lọc LC
Vi xử lý hệ thống
Mạch chia điện áp (< 5v)
Tải 220v AC
Mạch bảo vệ

CHƯƠNG 5: THIẾT KẾ VÀ THI CÔNG MẠCH UPS
GVHD: Th.s Tống Thanh Nhân Trang 55 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
5.1 Mạch DC – DC Mạch DC – DC có nhiệm vụ chuyển đổi điện DC 24v thành điện áp DC 310v cung cấp cho mạch DC – AC. Mạch chỉ hoạt động khi điện áp lưới bị mất hoặc thấp hơn 165v.
R133
2..5k
D833
DIODE
U27
SG3525A/SO
3
9
10
4
11
14
12
2
1
13
15
5
8
7
6
16
SYNC
COMP
SHDN
OSC
OUTA
OUTB
GND
+IN
-IN
VC
+VI
CT
SS
DISCHG
RT
VREF
R1333
10R
R26
2k
300v
C433222 C233
103
R1533
20k
ON
Q433
IRF1010E/TO
47R
R
D733
DIODE
R333
500k
R1033
10R
T133
BAX
15
6
48
Q333
IRF1010E/TO
12vR1233
10R Q233
IRF1010E/TO
C3330.47u/220v
R1433
20k
D533
DIODE
Q133
IRF1010E/TO
R1133
10R
D633
DIODE
R733
300kVREF
C53310u/50v
R933
300k
R833
300k
R23317k
R43310k
24V
C133104
Hình 5.2: Sơ đồ nguyên lý mạch DC –DC - Nguyên lý hoạt động của mạch: Khi on được nối xuống mức thấp ( 0v)
thì IC SG3525 hoạt động , cấp xung PWM luân phiên cho mỗi cặp most fet. Khi được cấp xung cặp most fet luân phiên đóng ngắt tạo từ thông biến thiên trên cuộn sơ cấp. Từ thông biến thiên này tạo ra điện áp xoay chiều trên cuộn thứ cấp biến áp xung.
- Biến áp xung trong mạch có kích thước 4.5cm - 4.2cm – 1.5cm, được quấn bằng đồng lá với hai cuộn sơ cấp mỗi cuộn 4 vòng được quấn bằng đồng lá 0,3mm và cuộn thư cấp có 60 vòng được quấn bằng ba sợi đồng 0.45mm. Như vậy biến áp có tỉ lệ 1/15 và 6v/1 vòng. Tần số hoạt động của biến áp là 34khz. Biến áp hoạt động theo nguyên tắc push pull.
- Điện áp xoay chiều ở cuộn thứ cấp được đưa vào cầu diode xung và được lọc phằng bằng tụ 0.47uF để cho ra điện áp một chiều 310v.
- Điện áp 310v được hồi tiếp về chân số 1 của ic SG3525 thông qua cầu phân áp 903k/17k điện áp này được so sánh với áp chuẩn 5v VREF, khi điện áp ngõ ra dưới 310v thì chân số 1 SG3525 thấp hơn 5v, IC tự tăng độ rộng xung để điện áp luôn ổn định 310v và ngược lại nếu điện áp cao hơn 310v thì IC giảm độ rộng xung lại.

CHƯƠNG 5: THIẾT KẾ VÀ THI CÔNG MẠCH UPS
GVHD: Th.s Tống Thanh Nhân Trang 56 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
5.2 Mạch DC – AC − Mạch DC – AC có nhiệm vụ chuyển đổi điện áp một chiều 310v sang điện áp
xoay chiều 220v.
12v
C11u/450v
D7
15v
D17
DIODE
D5
DIODE
20MHz1
D16
DIODE
D12
10v
C8100u
5v
D8
10v
C4100u
R32330k
L1
INDUCTOR
R17
470R
R18
470R
R19
470R
R1547k
D13
15v
R242k2
C22222
Q11
PNP ECB
U3
TLP251
2
3
5
67
8
C6100u
R22
10k
C7220u
24v
C10
103
-+
D834
BRIDGE
1
4
3
2
D11
15v
12v
D10
10vC5220u
D2
DIODE
D6
DIODE
310v
U2
TLP251
2
3
5
67
8
R311k
R410R
D24
DIODE
C322
10U
12v
C15330u/450v
R27
1k
R2
10R
R2910k
Q2IGBT_EN_GCE
23
1
R14
10R
T1
TRAN_HM31
1 3
2 4
C2100u
R1047k
C1
R747k
rv 1VR 10k
C3220u
R21
1k
C1333u/450v
T5
TRAN_HM31
13
25
T4
TRAN_HM31
1 3
2 4
Q4IGBT_EN_GCE
23
1
R122R
VCC
Q3IGBT_EN_GCE
23
1
C14C
R11
10R
SW1
RESET
12
Q13IRFZ44N/TO
C12
103
Q5NPN ECB
Q14
NPN ECB
J2
CON2
12
R30
470R
R1247k
Q1IGBT_EN_GCE
23
1
D4
DIODE
R9
10R
U1
TLP251
2
3
5
67
8
ISO2
pc817
12
43
-
+
U6A
OTL082
3
21
84
R23
1k U5
LM555
3
4 8
1
526
7
OUT
RS
T
VC
C
GN
D
CVTRGTHR
DSCHG
T3
TRAN_HM31
1 3
2 4
Q9
PNP ECB
Q8NPN ECB
RL DC
RELAY DPDT
34
5
68
712
R810R
R310R
Q10
PNP ECB
T2
TRAN_HM31
1 3
2 4
J3
CON2
12
R5
10R
Q12
PNP ECB
R6
10R
D1
C16C
ISO1
pc817
12
43
shun
0.22R/10w
12v
-+
D21
DIODE BRIDGE
D0
D22
5v
C11104
D1
DIODE
R3310k
Q7
NPN ECB
16F877A
3112
1
13
11 32
234567
3334353637383940
1516171823242526
1920212227282930
89
10
14
GN
DG
ND
MCLR/VPP
OSC1/CLK
VD
DV
DD
RA0RA1RA2RA3RA4/T0CLKRA5/SS
RB0/INTRB1RB2RB3RB4RB5RB6RB7
RC0/T1OSI/T1CLKRC1/T1OSORC2/CCP1
RC3/SCK/SCLRC4/SDI/SDA
RC5/SDORC6RC7
RD0/PSP0RD1/PSP1RD2/PSP2RD3/PSP3RD4/PSP4RD5/PSP5RD6/PSP6RD7/PSP7
RE0/RDRE1/WRRE2/CS
OSC2/CLKOUT
D3
DIODE
D14
10vC9220u
U8A
7408
1
23
147
R20
470R
R110R
J1
CON2
12
ngat
L2
INDUCTOR
D15
DIODE
VCC
C2
C122
22
R28150k
D9
15v
D18
DIODE
Q6NPN ECB
D23
12v
rv 2
VR 1k
R25
10k
D19
DIODE
U4
TLP251
2
3
5
67
8
R1310R
D20
DIODE
R16
10R
Hình 5.3 : sơ đồ DC – AC − Mạch sử dụng pic để tạo song sinPWM điều khiển cầu H 4 IGBT. Cách li
phần điều khiển và phần IGBT bằng opto TLP250, để khóa nhanh IGBT trong mạch sử dụng điện áp âm 10v.
− Điện áp xoay chiều sau cầu H được lọc sóng mang bằng mạch lọc thụ động LC với L= 2mH và C = 4uF ta thu được sóng sine có dạng như hình 5.4
Hình 5.4: Dạng sóng ngõ ra sau mạch lọc.

CHƯƠNG 5: THIẾT KẾ VÀ THI CÔNG MẠCH UPS
GVHD: Th.s Tống Thanh Nhân Trang 57 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
- Điều khiển cầu H bằng chân RC2, RC1, RD0 và RD1 của pic 16f877a. Hai chân RC2 và RC1 có nhiệm vụ cấp xung sine PWM cho hai IGBT phía trên, còn RD0 và RD1 cấp xung 50Hz cho 2 IGBT dưới.
5.3 Mạch chuyển tiếp Mạch có nhiệm vụ dò điện áp của điện lưới sau cầu diode, khi điện áp ở tụ lọc sau cầu diode dưới 250v thì mạch đóng relay chuyển nguồn điện cung cấp cho mạch cầu H từ điện lưới sang nguồn điện từ mạch DC – DC.
R32330k
310v
D24
DIODE
12v
R27
1k R2910k
rv 1VR 10k
C1333u/450v
C14C
Q14
NPN ECB
J2
CON2
12
-
+
U6A
OTL082
3
21
84
RL DC
RELAY DPDT
34
5
68
712
J3
CON2
12
ISO1
pc817
12
43
-+
D21
DIODE BRIDGE
D22
5v
R28150k
D23
12v
R25
10k
Hình 5.5 : sơ đồ mạch chuyển tiếp Mạch hoạt động dựa trên nguyên lý so sánh điện áp của opamp TL082, tuy mạch chuyển tiếp bằng relay có tốc độ chậm nhưng điện áp ngõ ra hầu như không ngắt quãng vì điện tích được nạp đầy trong 2 tụ 330uF trên mạch DC- AC sẽ xả ra cung cấp năng lượng tạm thời trong thời gian relay chuyển mạch. Các mạch trên được điều khiển, quản lý bằng vi xử lý pic 16f877a. Trong chương kế chúng ta sẽ lập trình cho các vi xử lý.

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 58 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC 16F877A
6.1 Chương trình cho pic tạo xung PWM #include <16f877a.h> #fuses nowdt,noprotect,nolvp,hs,put #use delay(clock=20000000) #use fast_io(d) #use fast_io(c) #byte portd = 0x8 #byte portc = 0x7 #bit a = portd.0 #bit b = portd.1 #bit c = portc.2 #bit d = portc.1 //-------------------------------------------------------- void xung1() { delay_us(499); a= 1; c= 1; delay_us(12); c=0; delay_us(86); c= 1; delay_us(12); c=0; delay_us(86); c= 1; delay_us(18); c=0; delay_us(80); c= 1; delay_us(18); c=0; delay_us(80); c= 1; delay_us(24);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 59 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
c=0; delay_us(74); c= 1; delay_us(24); c=0; delay_us(74); c= 1; delay_us(30); c=0; delay_us(68); c= 1; delay_us(30); c=0; delay_us(68); c= 1; delay_us(36); c=0; delay_us(62); c= 1; delay_us(30); c=0; delay_us(68); c= 1; delay_us(42); c=0; delay_us(56); c= 1; delay_us(42); c=0; delay_us(56); c= 1; delay_us(47); c=0; delay_us(51); c= 1; delay_us(47); c=0; delay_us(51);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 60 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
c= 1; delay_us(53); c=0; delay_us(45); c= 1; delay_us(53); c=0; delay_us(45); c= 1; delay_us(58); c=0; delay_us(40); c= 1; delay_us(58); c=0; delay_us(40); c= 1; delay_us(63); c=0; delay_us(35); c= 1; delay_us(63); c=0; delay_us(35); c= 1; delay_us(67); c=0; delay_us(31); c= 1; delay_us(67); c=0; delay_us(31); c= 1; delay_us(72); c=0; delay_us(26); c= 1;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 61 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(72); c=0; delay_us(26); c= 1; delay_us(76); c=0; delay_us(22); c= 1; delay_us(76); c=0; delay_us(22); c= 1; delay_us(80); c=0; delay_us(18); c= 1; delay_us(80); c=0; delay_us(18); c= 1; delay_us(83); c=0; delay_us(15); c= 1; delay_us(83); c=0; delay_us(15); c= 1; delay_us(87); c=0; delay_us(11); c= 1; delay_us(87); c=0; delay_us(11); c= 1; delay_us(89); c=0;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 62 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(9); c= 1; delay_us(89); c=0; delay_us(9); c= 1; delay_us(92); c=0; delay_us(6); c= 1; delay_us(92); c=0; delay_us(6); c= 1; delay_us(94); c=0; delay_us(4); c= 1; delay_us(94); c=0; delay_us(4); c= 1; delay_us(96); c=0; delay_us(2); c= 1; delay_us(96); c=0; delay_us(2); c= 1; delay_us(97); c=0; delay_us(1); c= 1; delay_us(97); c=0; delay_us(1); c= 1;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 63 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(99); delay_us(400); c= 1; delay_us(97); c=0; delay_us(1); c= 1; delay_us(97); c=0; delay_us(1); c= 1; delay_us(96); c=0; delay_us(2); c= 1; delay_us(96); c=0; delay_us(2); c= 1; delay_us(94); c=0; delay_us(4); c= 1; delay_us(94); c=0; delay_us(4); c= 1; delay_us(92); c=0; delay_us(6); c= 1; delay_us(92); c=0; delay_us(6); c= 1; delay_us(90); c=0; delay_us(8);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 64 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
c= 1; delay_us(90); c=0; delay_us(8); c= 1; delay_us(87); c=0; delay_us(11); c= 1; delay_us(87); c=0; delay_us(11); c= 1; delay_us(83); c=0; delay_us(15); c= 1; delay_us(83); c=0; delay_us(15); c= 1; delay_us(80); c=0; delay_us(18); c= 1; delay_us(80); c=0; delay_us(18); c= 1; delay_us(76); c=0; delay_us(22); c= 1; delay_us(76); c=0; delay_us(22); c= 1;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 65 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(72); c=0; delay_us(26); c= 1; delay_us(72); c=0; delay_us(26); c= 1; delay_us(68); c=0; delay_us(30); c= 1; delay_us(68); c=0; delay_us(30); c= 1; delay_us(63); c=0; delay_us(35); c= 1; delay_us(63); c=0; delay_us(35); c= 1; delay_us(58); c=0; delay_us(40); c= 1; delay_us(58); c=0; delay_us(40); c= 1; delay_us(53); c=0; delay_us(45); c= 1; delay_us(53);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 66 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
c=0; delay_us(45); c= 1; delay_us(47); c=0; delay_us(51); c= 1; delay_us(47); c=0; delay_us(51); c= 1; delay_us(42); c=0; delay_us(56); c= 1; delay_us(42); c=0; delay_us(56); c= 1; delay_us(36); c=0; delay_us(62); c= 1; delay_us(36); c=0; delay_us(62); c= 1; delay_us(30); c=0; delay_us(68); c= 1; delay_us(30); c=0; delay_us(68); c= 1; delay_us(24); c=0; delay_us(74);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 67 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
c= 1; delay_us(24); c=0; delay_us(74); c= 1; delay_us(18); c=0; delay_us(80); c= 1; delay_us(18); c=0; delay_us(80); c= 1; delay_us(12); c=0; a=0; delay_us(86); delay_us(199); } //-------------------------------------------------- void xung2() { delay_us(499); b= 1; d= 1; delay_us(12); d=0; delay_us(86); d= 1; delay_us(12); d=0; delay_us(86); d= 1; delay_us(18); d=0; delay_us(80); d= 1;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 68 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(18); d=0; delay_us(80); d= 1; delay_us(24); d=0; delay_us(74); d= 1; delay_us(24); d=0; delay_us(74); d= 1; delay_us(30); d=0; delay_us(68); d= 1; delay_us(30); d=0; delay_us(68); d= 1; delay_us(36); d=0; delay_us(62); d= 1; delay_us(30); d=0; delay_us(68); d= 1; delay_us(42); d=0; delay_us(56); d= 1; delay_us(42); d=0; delay_us(56); d= 1; delay_us(47);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 69 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
d=0; delay_us(51); d= 1; delay_us(47); d=0; delay_us(51); d= 1; delay_us(53); d=0; delay_us(45); d= 1; delay_us(53); d=0; delay_us(45); d= 1; delay_us(58); d=0; delay_us(40); d= 1; delay_us(58); d=0; delay_us(40); d= 1; delay_us(63); d=0; delay_us(35); d= 1; delay_us(63); d=0; delay_us(35); d= 1; delay_us(67); d=0; delay_us(31); d= 1; delay_us(67); d=0; delay_us(31);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 70 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
d= 1; delay_us(72); d=0; delay_us(26); d= 1; delay_us(72); d=0; delay_us(26); d= 1; delay_us(76); d=0; delay_us(22); d= 1; delay_us(76); d=0; delay_us(22); d= 1; delay_us(80); d=0; delay_us(18); d= 1; delay_us(80); d=0; delay_us(18); d= 1; delay_us(83); d=0; delay_us(15); d= 1; delay_us(83); d=0; delay_us(15); d= 1; delay_us(87); d=0; delay_us(11); d= 1; delay_us(87);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 71 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
d=0; delay_us(11); d= 1; delay_us(89); d=0; delay_us(9); d= 1; delay_us(89); d=0; delay_us(9); d= 1; delay_us(92); d=0; delay_us(6); d= 1; delay_us(92); d=0; delay_us(6); d= 1; delay_us(94); d=0; delay_us(4); d= 1; delay_us(94); d=0; delay_us(4); d= 1; delay_us(96); d=0; delay_us(2); d= 1; delay_us(96); d=0; delay_us(2); d= 1; delay_us(97); d=0; delay_us(1);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 72 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
d= 1; delay_us(97); d=0; delay_us(1); d= 1; delay_us(99); delay_us(400); d= 1; delay_us(97); d=0; delay_us(1); d= 1; delay_us(97); d=0; delay_us(1); d= 1; delay_us(96); d=0; delay_us(2); d= 1; delay_us(96); d=0; delay_us(2); d= 1; delay_us(94); d=0; delay_us(4); d= 1; delay_us(94); d=0; delay_us(4); d= 1; delay_us(92); d=0; delay_us(6); d= 1; delay_us(92); d=0;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 73 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(6); d= 1; delay_us(90); d=0; delay_us(8); d= 1; delay_us(90); d=0; delay_us(8); d= 1; delay_us(87); d=0; delay_us(11); d= 1; delay_us(87); d=0; delay_us(11); d= 1; delay_us(83); d=0; delay_us(15); d= 1; delay_us(83); d=0; delay_us(15); d= 1; delay_us(80); d=0; delay_us(18); d= 1; delay_us(80); d=0; delay_us(18); d= 1; delay_us(76); d=0; delay_us(22); d= 1;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 74 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(76); d=0; delay_us(22); d= 1; delay_us(72); d=0; delay_us(26); d= 1; delay_us(72); d=0; delay_us(26); d= 1; delay_us(68); d=0; delay_us(30); d= 1; delay_us(68); d=0; delay_us(30); d= 1; delay_us(63); d=0; delay_us(35); d= 1; delay_us(63); d=0; delay_us(35); d= 1; delay_us(58); d=0; delay_us(40); d= 1; delay_us(58); d=0; delay_us(40);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 75 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
d= 1; delay_us(53); d=0; delay_us(45); d= 1; delay_us(53); d=0; delay_us(45); d= 1; delay_us(47); d=0; delay_us(51); d= 1; delay_us(47); d=0; delay_us(51); d= 1; delay_us(42); d=0; delay_us(56); d= 1; delay_us(42); d=0; delay_us(56); d= 1; delay_us(36); d=0; delay_us(62); d= 1; delay_us(36); d=0; delay_us(62); d= 1; delay_us(30); d=0; delay_us(68); d= 1; delay_us(30); d=0;

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 76 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_us(68); d= 1; delay_us(24); d=0; delay_us(74); d= 1; delay_us(24); d=0; delay_us(74); d= 1; delay_us(18); d=0; delay_us(80); d= 1; delay_us(18); d=0; delay_us(80); d= 1; delay_us(12); d=0; b=0; delay_us(86); delay_us(199); } void main() { set_tris_c(0b00000000); set_tris_d(0b00000000); a=0; b=0; c=0; d=0; //---------------------------------- while (1) { xung1(); xung2();

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 77 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
} }

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 78 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
6.2 Chương trình cho pic xử lý hệ thống #include <16f877a.h> #fuses nowdt,noprotect,nolvp,xt,put #device 16f877a*=16ADC=10 #include <stdio.h> #use delay(clock=4000000) #use fast_io(b) #use fast_io(d) #byte portb = 0x6 #byte portd = 0x8 #bit rs = portd.0 #bit rw = portd.1 #bit en = portd.2 #bit loidong = portd.3 #bit ngat = portd.4 #bit swich = portd.5 #bit bip = portd.6 #bit delay = portd.7 int8 malenh,dulieu,vitri; int8 i,tram,chuc,donvi,x,y; char acquy[16]=" CHE DO AC QUY "; char dienluoi[16]="CHE DO DIEN LUOI"; char loiacquy[16]="LOI AC QUY (T_T)"; char quatai[13]="SU CO QUA TAI"; char apacquy[4]="BAT:"; char out[4]="OUT:"; char von[1]="V"; char quadong[16]="BAO VE QUA DONG "; char can[16]=" AC QUY CON 10% "; char het[16]=" HET AC QUY =)) "; char cho1[16]="VUI LONG CHO. "; char cho2[16]="VUI LONG CHO...."; char cho3[16]="VUI LONG CHO...."; char cho4[16]="VUI LONG CHO...."; char khoidong[16]="=DANG KHOI DONG="; char ngung[16]="NGUNG HOAT DONG!"; char cach[1]=" "; float ketqua; char *text; //--------------------------------------------------------

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 79 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
void lenh_lcd(int8 malenh) { portb=malenh; en=1; rs=0; rw=0; en=0; delay_ms(3); } //-------------------------------------------------------- void data_lcd(int8 dulieu) { portb=dulieu; en=1; rs=1; rw=0; en=0; delay_ms(3); } //-------------------------------------------------------- void hienthi(int8 vitri, char mang[]) {lenh_lcd(vitri); text=mang; for(i=0;i<=16;i++) {data_lcd(*(text+i)); } } //-------------------------------------- void hienthi2(int8 vitri, char mang[]) {lenh_lcd(vitri); text=mang; for(i=0;i<=4;i++) {data_lcd(*(text+i)); } } void hienthi3(int8 vitri, char mang[]) {lenh_lcd(vitri); text=mang; for(i=0;i<=1;i++) {data_lcd(*(text+i)); } } void ADC1()

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 80 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
{ setup_ADC(ADC_clock_internal); setup_ADC_ports(AN0_AN1_AN2_AN3_AN4); set_ADC_channel(0); delay_ms(1); } void ADC2() { setup_ADC(ADC_clock_internal); setup_ADC_ports(AN0_AN1_AN2_AN3_AN4); set_ADC_channel(1); delay_ms(1); } //--------------------------------------------------- void main() { set_tris_b(0); set_tris_d(0b10101000); //------------------- delay_ms(1); //------------------- lenh_lcd(0x38); lenh_lcd(0x0e); lenh_lcd(0x01); lenh_lcd(0x80); //--------------- //--------------------------------------------------- if (delay == 0) { while(delay == 0) { bip = 1; hienthi(0x80,khoidong); hienthi(0xc0,cho1); delay_ms(500); hienthi(0xc0,cho2); delay_ms(500); hienthi(0xc0,cho3); delay_ms(500); hienthi(0xc0,cho4);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 81 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_ms(500); bip = 0; } } delay_ms(1000); ngat = 1; while(1) { if ( swich == 1) { hienthi(0xc0,dienluoi); } if ( swich == 0) { hienthi(0xc0,acquy); bip = 1; delay_ms(200); bip = 0; delay_ms(1000); delay_ms(1000); delay_ms(1000); delay_ms(1000); delay_ms(1000); } if (loidong == 0) { ngat = 0; hienthi(0xc0,quadong); hienthi(0x80,ngung); bip = 1; while (1) {} } ADC2(); hienthi2(0x80,apacquy); hienthi3(0x86,von); delay_ms(1); x = read_ADC()/20.48; chuc = x/10; donvi=x%10; lenh_lcd(0x84);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 82 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
data_lcd(chuc + 48); delay_ms(1); data_lcd(donvi + 48); delay_ms(1); if ( x <= 21) { hienthi(0xc0,can); bip = 1; delay_ms(300); bip = 0; delay_ms(400); bip = 1; delay_ms(300); bip = 0; delay_ms(300); } if ( x <= 20) { hienthi(0xc0,het); hienthi(0x80,ngung); ngat = 0; bip = 1; while (1) {} } if ( x >= 29) { hienthi(0xc0,loiacquy); hienthi(0x80,ngung); while (1) {} } hienthi3(0x87,cach); ADC1(); hienthi2(0x88,out); hienthi3(0x8f,von); delay_ms(1); x = read_ADC()/2.048; tram = x/100; chuc = (x%100)/10; donvi=(x%100)%10; lenh_lcd(0x8c); data_lcd(tram + 48);

CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC16F877A
GVHD: Th.s Tống Thanh Nhân Trang 83 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
delay_ms(1); data_lcd(chuc + 48); delay_ms(1); data_lcd(donvi + 48); delay_ms(1); if ( x <= 165) { delay_ms(1000); while (x <= 165) { ngat = 0; bip =1; hienthi(0x80,ngung); hienthi(0xc0,quatai); while(1) {} } } } } //====================================

CHƯƠNG 7: KẾT QUẢ, NHẬN XÉT ĐÁNH GIÁ VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI
GVHD: Th.s Tống Thanh Nhân Trang 84 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
CHƯƠNG 7: KẾT QUẢ, NHẬN XÉT ĐÁNH GIÁ VÀ HƯỚNG PHÁT TRIỂN CỦA ĐỀ TÀI
7.1 Kết quả của đề tài Đồ án đã thõa mãn các yêu cầu đặt ra cho 1 UPS online như:
- Dạng sóng ngõ ra là sóng sine - Thời gian chuyển mạch thấp - Chống sét, lọc nhiễu, ổn tần - Cảnh báo quá tải, bảo vệ quá dòng, chập tải
Tuy nhiên đồ án còn một số khuyết điểm hạn chế như dùng mạch lọc thụ động LC sẽ phát ra âm thanh khi không tải , lượng sóng hài cao tần lọc không triệt để sau mạch lọc . 7.2 Nhận xét đánh giá Đây là đề tài có khả năng ứng dụng trên thị trường. Nếu hoàn thành việc tính toán giá thành và so sánh với các sản phẩm trên thực tế thì hoàn toàn có thể đưa sản phẩm ra thị trường.
7.2 Hướng phát triển của đề tài : Cần thi công bộ lọc để tạo ra sản phẩm hoàn chỉnh. Kết hợp giao tiếp máy tính với pic đễ dễ dàng cài đặt và sử dụng.

TÀI LIỆU THAM KHẢO
GVHD: Th.s Tống Thanh Nhân Trang 85 SVTH: Phạm Hào Kiệt Nguyễn Minh Đức
TÀI LIỆU THAM KHẢO
1. www.Alldatasheet.com tra cứu thông số linh kiện. 2. Dientuvietnam.net tìm hiểu về igbt và most fet. 3. Tiêu chuẩn acquy, TCVN 4472 – 1993. 4. Điện tử công suất 1. NXB Đại học quốc gia TPHCM.

MỤC LỤC CHƯƠNG DẪN NHẬP ............................................................................................ 1
CHƯƠNG 1: GIỚI THIỆU BỘ LƯU ĐIỆN(UPS) VÀ MẠCH NGHỊCH LƯU
CẦU H ........................................................................................................................ 2
1.1 Giới thiệu bộ lưu điện (UPS) ............................................................................ 2
1.1.2 Giới thiệu bộ nghịch lưu ............................................................................ 4
1.2 Các phương pháp điều khiển bộ nghịch lưu áp: ........................................... 6
1.3.Mạch cầu H ....................................................................................................... 9
1.4 Các bộ lọc tần số ......................................................................................... 10
1.5 Tóm gọn sơ đồ nguyên lý vận hành ................................................................ 12
CHƯƠNG 2: GIỚI THIỆU CHUNG VỀ ACQUY ............................................. 13
2.1Giới thiệu chung về acquy ............................................................................... 13
2.1.1Quá trình hóa học xảy ra trong acquy axit ................................................ 14
2.2 Các thông số cơ bản của acquy ....................................................................... 15
2.2.1 Sức điện động: .......................................................................................... 15
2.2.3 Dung lượng nạp ........................................................................................ 17
2.2.5 Đặc tính nạp ............................................................................................. 18
2.2.6 Những dấu hiệu cho thấy acquy đã đầy điện .......................................... 19
CHƯƠNG 3: GIỚI THIỆU VI ĐIỀU KHIỂN PIC 16F877A VÀ MỘT SỐ
LINH KIỆN KHÁC ................................................................................................ 23
3.1 Vi điều khiển pic 16F877a .............................................................................. 23
3.1.2 Tổ chức bộ nhớ: ..................................................................................... 25
3.1.3 Thanh ghi, Port : .................................................................................. 27
3.1.4 Giao tiếp nối tiếp .................................................................................. 30
3.1.6 Ngắt ...................................................................................................... 35
3.2 Giới thiệu LCD ............................................................................................... 37
3.2.1 Tổng quan: ................................................................................................ 37
3.2.3. Bộ điều khiển LCD: ................................................................................ 40

CHƯƠNG 4: GIỚI THIỆU VỀ IGBT, OPTO, SG3525 VÀ BIẾN ÁP XUNG 45
4.1 Giới thiệu về IGBT ......................................................................................... 45
4.2 Giới thiệu về ic opto tổ hợp TLP250: ............................................................ 48
4.3 IC điều chế độ rộng xung SG3525 .................................................................. 49
4.4 Biến áp xung ................................................................................................... 51
CHƯƠNG 5: THIẾT KẾ VÀ THI CÔNG MẠCH UPS ..................................... 54
5.1 Mạch DC – DC ............................................................................................... 55
5.2 Mạch DC – AC ............................................................................................... 56
5.3 Mạch chuyển tiếp ............................................................................................ 57
CHƯƠNG 6: CHƯƠNG TRÌNH CHO PIC 16F877A ....................................... 58
6.1 Chương trình cho pic tạo xung PWM ............................................................. 58
6.2 Chương trình cho pic xử lý hệ thống .............................................................. 78
CHƯƠNG 7: KẾT QUẢ, NHẬN XÉT ĐÁNH GIÁ VÀ HƯỚNG PHÁT
TRIỂN CỦA ĐỀ TÀI ............................................................................................. 84
7.1 Kết quả của đề tài .......................................................................................... 84
7.2 Hướng phát triển của đề tài : ........................................................................... 84
TÀI LIỆU THAM KHẢO ...................................................................................... 85