Embed Size (px)
DESCRIPTION
Manual de instalacion de regulador de velocidad
Citation preview

GOVERNADOR ELETRÔNICO DE VELOCIDADE
Descrição Geral
O sistema de governador eletrônico consiste de uma unidade que controla a rotação do motor. Suas tarefas são:-manter a marcha lenta no valor especificado-manter a velocidade de operação dentro de valor especificado independente da solicitação de carga.
Diferentemente do governador mecânico, o governador eletrônico não tem pesos dentro do governador. A velocidade é controlada pela unidade de controle (1,fig1) “sentindo” a diferença entre o valor especificado e o valor da velocidade real em cada instante.
O valor da diferença é convertido em um sinal para um eletromagneto (atuador) que ajusta a cremalheira da bomba injetora para aumentar ou diminuir a quantidade de combustível injetado.O texto seguinte descreve os componentes que compõem o sistema, suas funções separadamente.
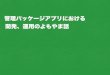
Certos motores tem bombas injetoras com governador RQ utilizados como limitadores de velocidade. Nestes casos o atuador é fixado numa bancada separada. O sensor e a proteção eletrônica de sobrevelocidade são omitidos nestes casos, e o solenóide de parada/válvula “shut-off” é usada apenas para desligar o motor normalmente.
Figura 1: Motor acoplado a um governador eletrônico (diagrama do sistema)
1. Unidade de Controle 5.1. Solenóide de parada2. Pickup de rpm do motor 5.2. Válvula de corte de combustível3. Atuador 6. Baterias4. Pickup de rpm para sobrevelocidade
SENSOR DE VELOCIDADE
Página 1 de 15
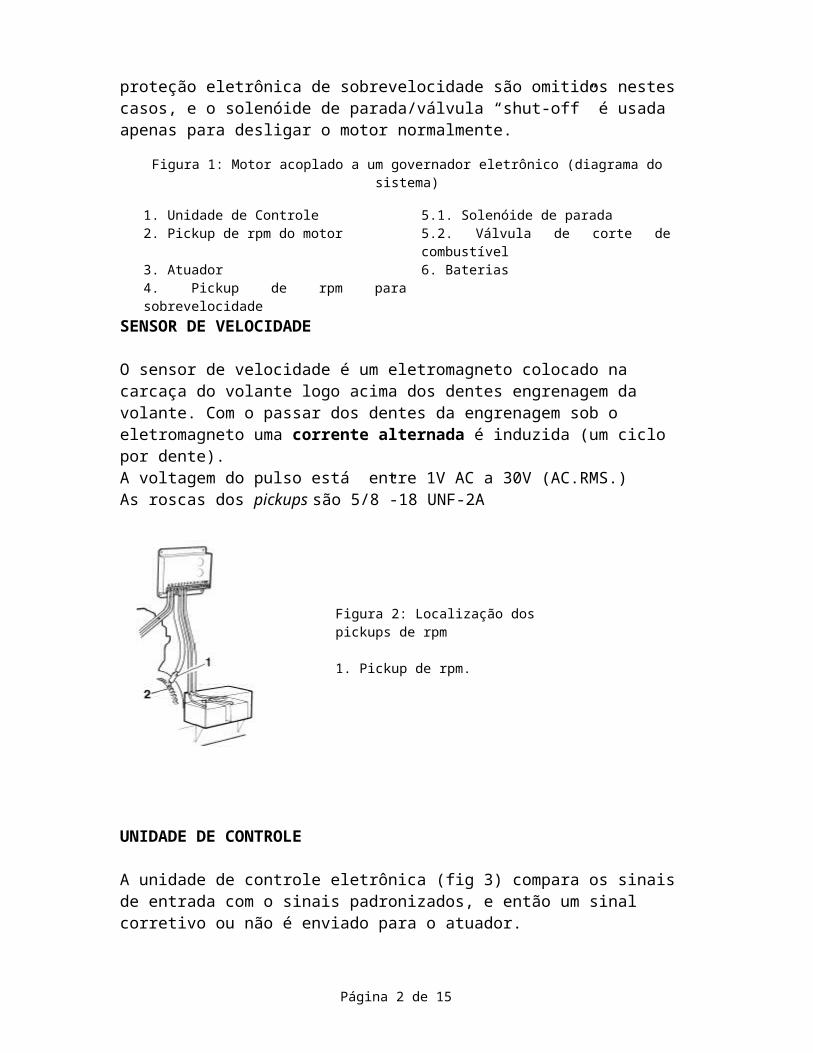
O sensor de velocidade é um eletromagneto colocado na carcaça do volante logo acima dos dentes engrenagem da volante. Com o passar dos dentes da engrenagem sob o eletromagneto uma corrente alternada é induzida (um ciclo por dente).A voltagem do pulso está entre 1V AC a 30V (AC.RMS.)As roscas dos pickups são 5/8”-18 UNF-2A
UNIDADE DE CONTROLE
A unidade de controle eletrônica (fig 3) compara os sinais de entrada com o sinais padronizados, e então um sinal corretivo ou não é enviado para o atuador.
A unidade de controle tem uma série de possibilidade de ajustes que serão descritas abaixo. Os ajustes podem ser feitos após serem retiradas as capas de borracha da unidade de controle.
Página 2 de 15
Figura 2: Localização dos pickups de rpm
1. Pickup de rpm.2. Cremaleira do volante
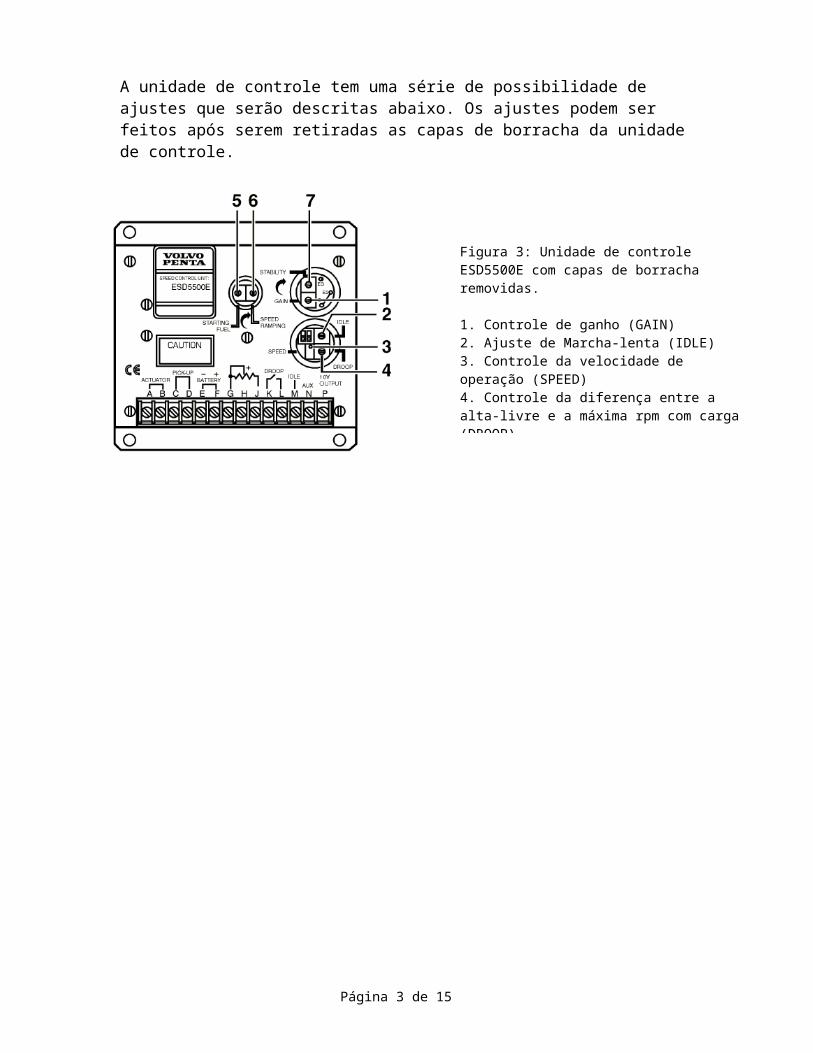
Figura 3: Unidade de controle ESD5500E com capas de borracha removidas.
1. Controle de ganho (GAIN)2. Ajuste de Marcha-lenta (IDLE)3. Controle da velocidade de operação (SPEED)4. Controle da diferença entre a alta-livre e a máxima rpm com carga (DROOP)5. Ajuste de combustível inicial (STARTING FUEL)6. Ajuste da rampa de aceleração (SPEED RAMPING)7. Controle de estabilidade (STABILITY)
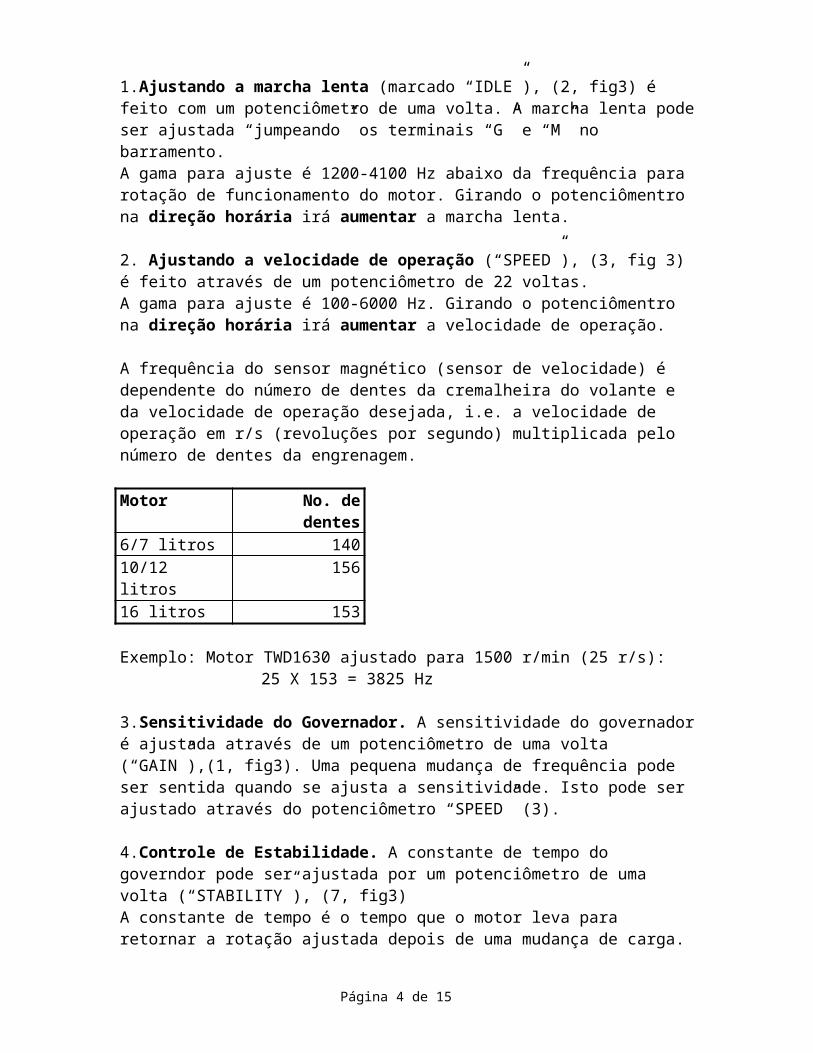
1.Ajustando a marcha lenta (marcado “IDLE”), (2, fig3) é feito com um potenciômetro de uma volta. A marcha lenta pode ser ajustada “jumpeando” os terminais “G” e “M” no barramento.A gama para ajuste é 1200-4100 Hz abaixo da frequência para rotação de funcionamento do motor. Girando o potenciômentro na direção horária irá aumentar a marcha lenta.
2. Ajustando a velocidade de operação (“SPEED”), (3, fig 3) é feito através de um potenciômetro de 22 voltas. A gama para ajuste é 100-6000 Hz. Girando o potenciômentro na direção horária irá aumentar a velocidade de operação.
A frequência do sensor magnético (sensor de velocidade) é dependente do número de dentes da cremalheira do volante e da velocidade de operação desejada, i.e. a velocidade de operação em r/s (revoluções por segundo) multiplicada pelo número de dentes da engrenagem.
Motor No. de dentes6/7 litros 14010/12 litros 15616 litros 153
Exemplo: Motor TWD1630 ajustado para 1500 r/min (25 r/s):25 X 153 = 3825 Hz
3.Sensitividade do Governador. A sensitividade do governador é ajustada através de um potenciômetro de uma volta (“GAIN”),(1, fig3). Uma pequena mudança de frequência pode ser sentida quando se ajusta a sensitividade. Isto pode ser ajustado através do potenciômetro “SPEED” (3).
4.Controle de Estabilidade. A constante de tempo do governdor pode ser ajustada por um potenciômetro de uma volta (“STABILITY”), (7, fig3)A constante de tempo é o tempo que o motor leva para retornar a rotação ajustada depois de uma mudança de carga.
5.Droop. O controle de queda (4, fig3) marcado “DROOP” está funcionando quando os terminais “K” e “L” estão conectados. A gama de ajuste é de 1 a 5 %. Girando na direção horária irá aumentar o seu valor.
“Jumpeando” os terminais “G” e “H” um maior droop pode ser conseguido.
6. Ajuste do combustível de partida. Girando o ajuste “STARTING FUEL” (5, fig.3) na direção horária irá aumentar a quantidade de combustível enviada para o motor quando da partida. Girando o ajuste totalmente na direção anti-horária, a quantidade de combustível será mínima ou zero. Girando o ajuste totalmente na direção horária a quantidade de combustível será máxima durante a partida.
7.Ajuste da rampa de aceleração. Girando “SPEED RAMPING” (6, fig.3) na direção horária irá diminuir a aceleração da rotação do motor. Girando o ajuste totalmente na
Página 3 de 15
direção horária, a aceleração pode ter até 20 segundos dependendo da rotação de trabalho. Com o ajuste totalmente anti-horário, a rampa será efetivamente eliminada, ou seja, a rotação do motor sobe quase que instantaneamente à de trabalho.
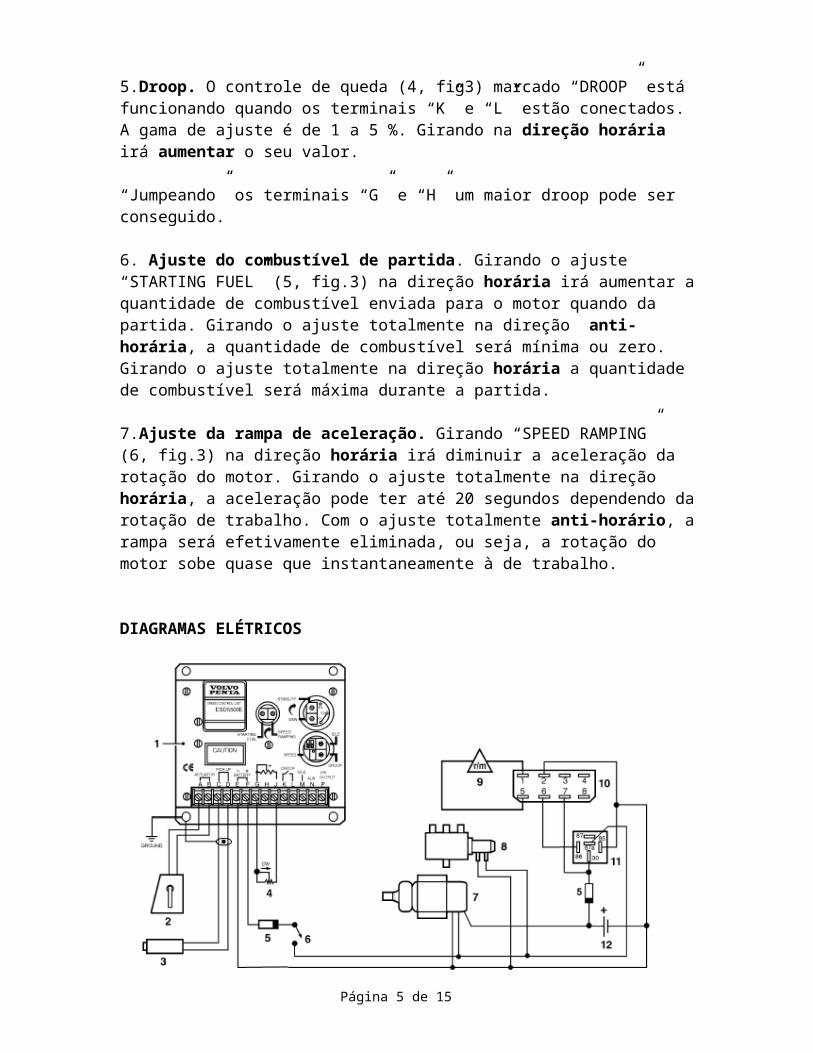
DIAGRAMAS ELÉTRICOS
Figura 8. Conexões do solenóide de parada ou válvula de corte de combustível, energizados durante a operação, sistema 24V.
Nota: Nas versões mais novas o solenóide de parada tem uma proteção transiente interna. Portanto, apenas uma proteção transiente (7) é necessária para a unidade de controle.
1. Unidade de controle 5. Fusível de 15 A (rápido) 9. Sensor de rpm para sobrevelocidade2. Atuador 6. Chave principal 10. Chave (switch) de rpm (proteção contra
sobrevelocidade3. Pickup magnético 7. Solenóide de parada (Não se aplica ao ACD175) 11. Relé4. Ajuste de rpm externo (5k) 8. Válvula de corte de combustível 12. Bateria: 12 ou 24V
Procedimentos
Antes da primeira partida
Checar o seguinte antes de conectar as baterias:
1. Que a voltagem do sistema é correta (12 ou 24V)
2. Que a polaridade está correta nos terminais “E” (negativo) e “F” (positivo) da unidade de controle.Observação! A unidade de controle tem uma série de proteções internas. Qualquer possível curto circuito no atuador ou nos cabos parará o motor. Depois das baterias serem desconectadas e a causa remediada, a unidade irá funcionar corretamente de novo.
3. Checar se a fiação está correta. Ver diagrama elétrico nas figuras 8, 9, 10 e 11.Página 4 de 15
4.Colocar os potenciômetros “GAIN” (ganho) e “STABILITY” da unidade de controle na posição central.
5. Temporariamente jumpear os terminais “G” e “M” na unidade de controle para ajustar a marcha lenta (aprox. 600 - 800 RPM)
Primeira Partida
1. Conectar as baterias e partir o motor. O governador deve manter o motor em marcha lenta. Se desejado, a marcha lenta pode ser aumentada girando o potenciômetro “IDLE” na direção horária. Gire o potenciômetro suavemente, não o leve direto para sua posição final.
2. Após o motor checado e o se seu funcionamento estiver normal, remover o “jumper” entre os terminais “G” e “M” na unidade de controle. A rotação deve aumentar para cerca de 1567 RPM ou 1870 RPM dependendo da velocidade de operação desejada.Para unidades de controle novas ou previamente ajustadas, o potenciômetro “SPEED” deve ser girado aproximadamente 12 voltas na direção horária da sua posição final para que se obtenha a velocidade de 1500 RPM.
3. Fazer o ajuste final do ganho (“GAIN”) e da estabilidade (“STABILITY”) na unidade de controle:
- Partir o motor sem carga e girar o controle “GAIN” na direção horária até que ocorra instabilidade. Então gire na direção anti-horária até que se obtenha estabilidade e então gire mais 1/8 volta.
- Ajustar o controle “STABILITY” da mesma maneira que o ganho (“GAIN”) acima. Veja também a figura 17.Observação: Quando se está ajustando o ganho (“GAIN”) a velocidade de ajustada pode mudar. Ajuste se necessário, usando o potenciômetro “SPEED”.
Após estes ajustes serem completados, pode ser aplicada carga. Pode ser necessário repetir os ajustes anteriores. Normalmente existe um ponto crítico para estes ajustes com o motor frio e sem carga.
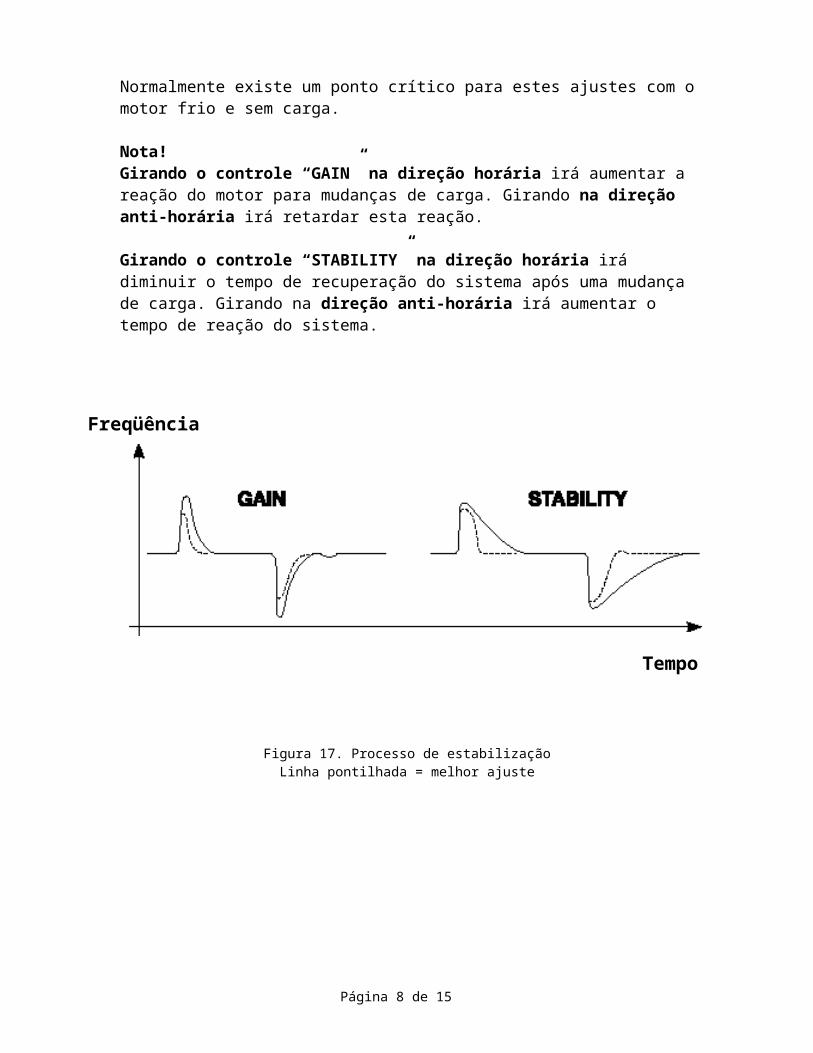
Nota!Girando o controle “GAIN” na direção horária irá aumentar a reação do motor para mudanças de carga. Girando na direção anti-horária irá retardar esta reação.
Girando o controle “STABILITY” na direção horária irá diminuir o tempo de recuperação do sistema após uma mudança de carga. Girando na direção anti-horária irá aumentar o tempo de reação do sistema.
Página 5 de 15
Freqüência
Tempo
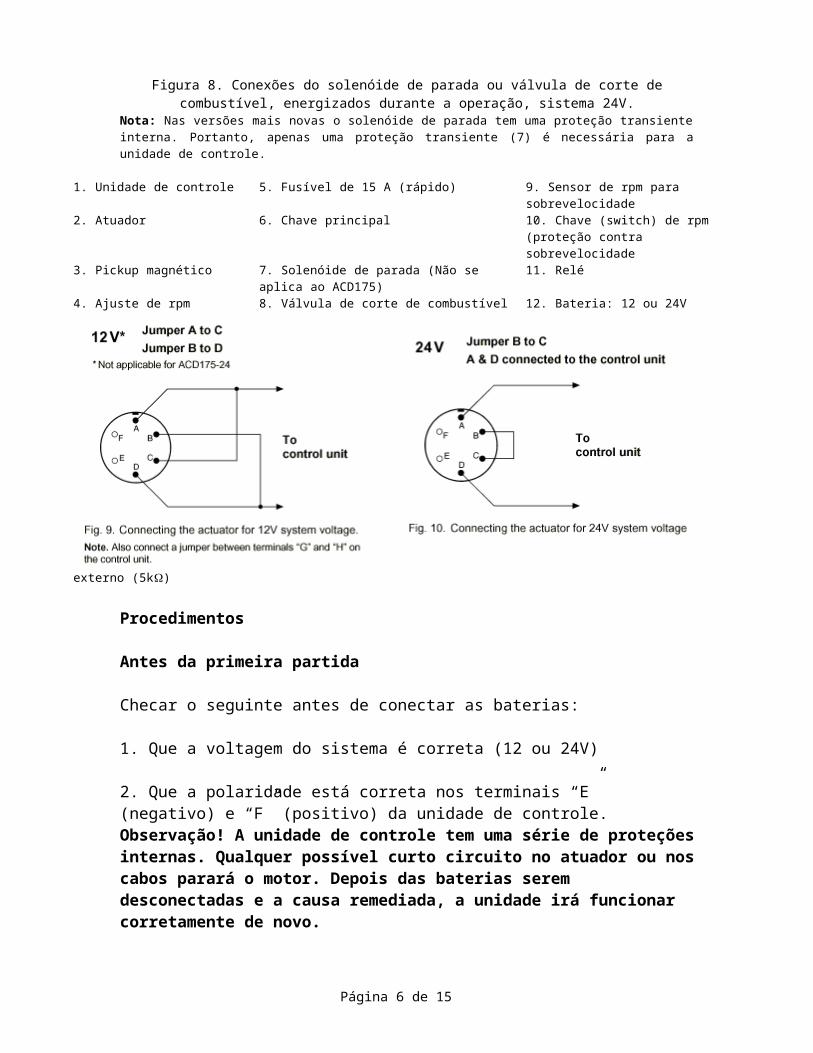
Figura 17. Processo de estabilizaçãoLinha pontilhada = melhor ajuste
Página 6 de 15
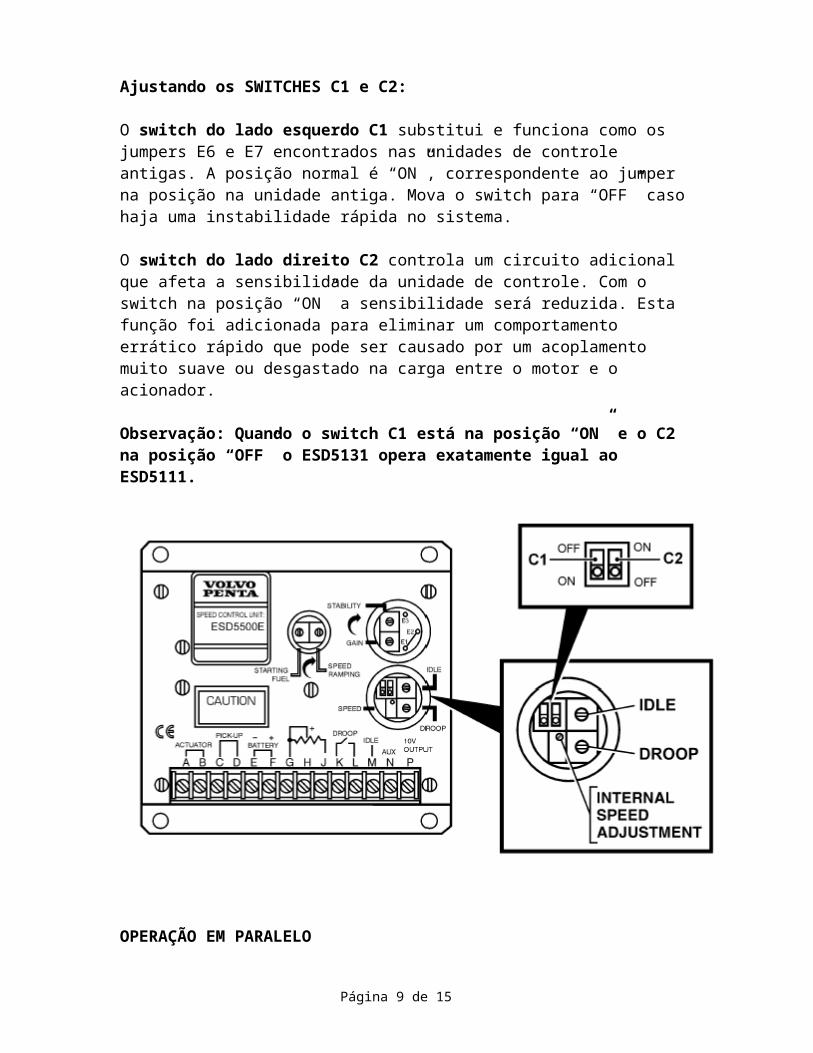
Ajustando os SWITCHES C1 e C2:
O switch do lado esquerdo C1 substitui e funciona como os jumpers E6 e E7 encontrados nas unidades de controle antigas. A posição normal é “ON”, correspondente ao jumper na posição na unidade antiga. Mova o switch para “OFF” caso haja uma instabilidade rápida no sistema.
O switch do lado direito C2 controla um circuito adicional que afeta a sensibilidade da unidade de controle. Com o switch na posição “ON” a sensibilidade será reduzida. Esta função foi adicionada para eliminar um comportamento errático rápido que pode ser causado por um acoplamento muito suave ou desgastado na carga entre o motor e o acionador.
Observação: Quando o switch C1 está na posição “ON” e o C2 na posição “OFF” o ESD5131 opera exatamente igual ao ESD5111.
OPERAÇÃO EM PARALELO
Para uma boa divisão de cargas para 2 ou mais geradores sendo usados em paralelo, existem dois métodos:
1. Como o sistema de governador eletrônico funciona rápida e exatamente, sua vantagem pode ser usada para operações em paralelo onde se divide a carga. Caso seja necessárias mais informações contacte a VOLVO PENTA. 2. O método mais fácil para se utilizar divisores de carga é utilizar o mesmo droop dos governadores mecânicos. Para o droop de 4,5% (ajustados pela Volvo Penta) os terminais “K” e “L” devem ser conectados.
Página 7 de 15
SOLUCIONANDO PROBLEMAS
1. O MOTOR NÃO IRÁ FUNCIONAR
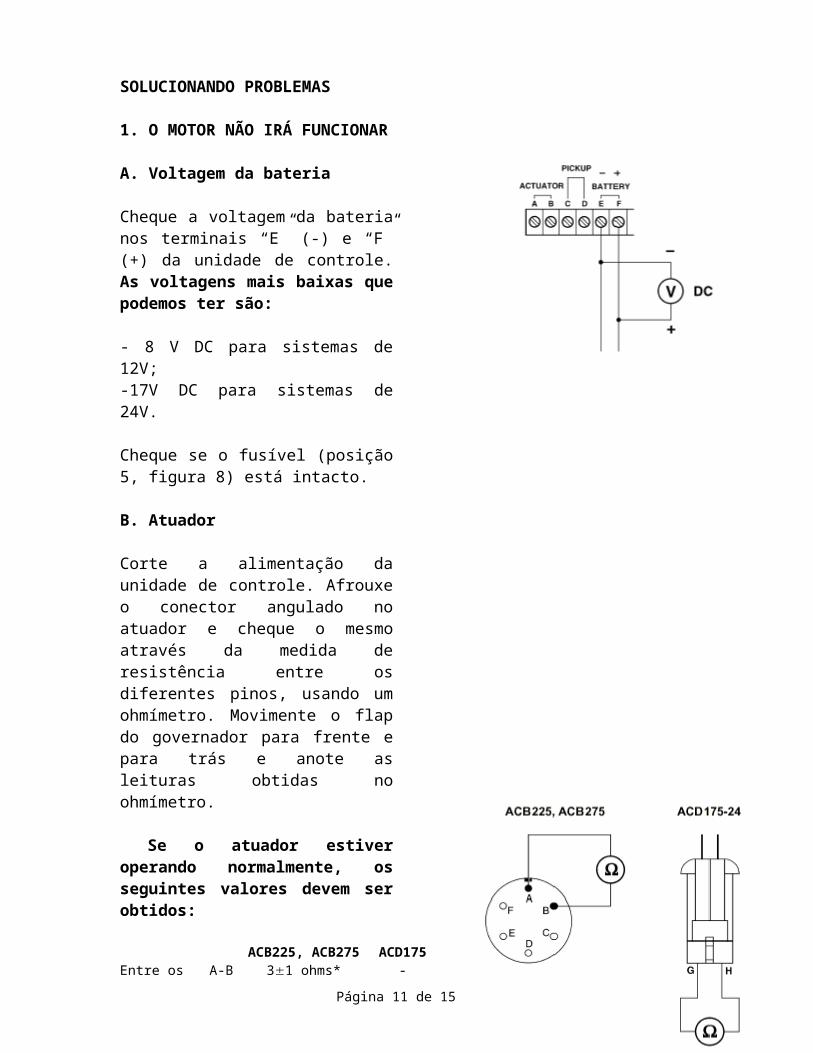
A. Voltagem da bateria
Cheque a voltagem da bateria nos terminais “E” (-) e “F” (+) da unidade de controle. As voltagens mais baixas que podemos ter são:
- 8 V DC para sistemas de 12V;-17V DC para sistemas de 24V.
Cheque se o fusível (posição 5, figura 8) está intacto.
B. Atuador
Corte a alimentação da unidade de controle. Afrouxe o conector angulado no atuador e cheque o mesmo através da medida de resistência entre os diferentes pinos, usando um ohmímetro. Movimente o flap do governador para frente e para trás e anote as leituras obtidas no ohmímetro.
Se o atuador estiver operando normalmente, os seguintes valores devem ser obtidos:
ACB225, ACB275 ACD175Entre os pinos A-B 31 ohms* -
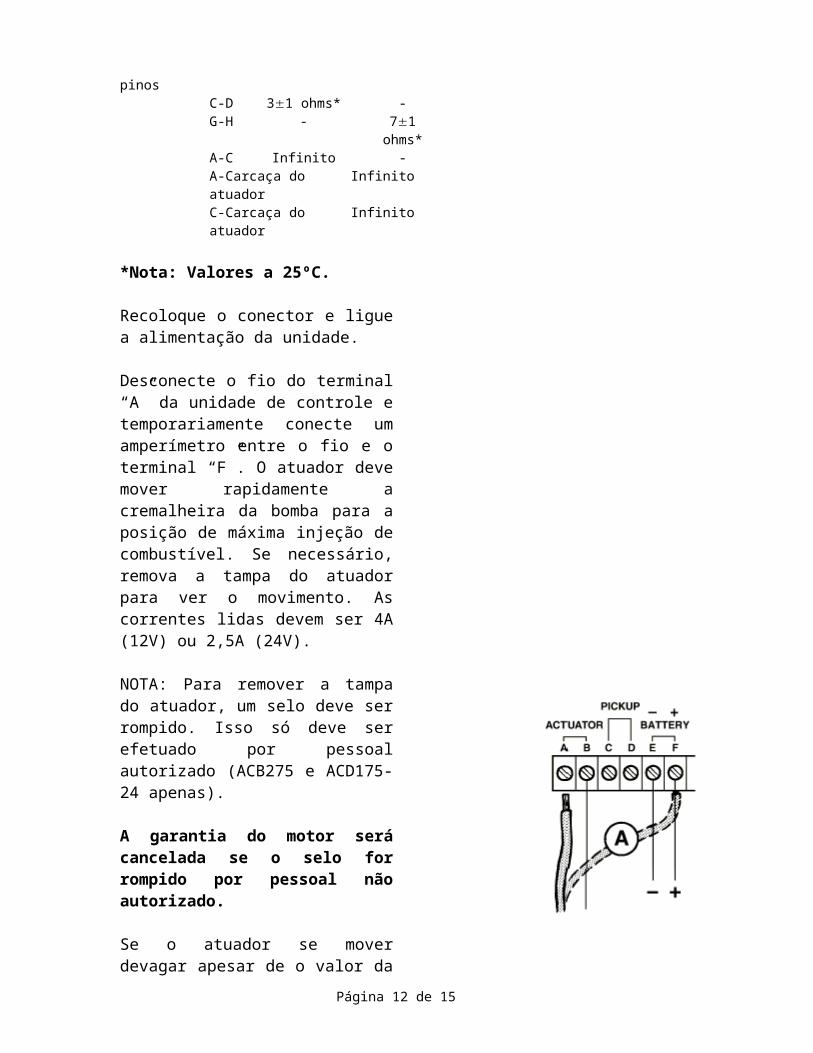
C-D 31 ohms* -G-H - 71 ohms*A-C Infinito -A-Carcaça do atuador InfinitoC-Carcaça do atuador Infinito
*Nota: Valores a 25ºC.
Recoloque o conector e ligue a alimentação da unidade.
Desconecte o fio do terminal “A” da unidade de controle e temporariamente conecte um amperímetro entre o fio e o terminal “F”. O atuador deve mover rapidamente a cremalheira da bomba para
Página 8 de 15
a posição de máxima injeção de combustível. Se necessário, remova a tampa do atuador para ver o movimento. As correntes lidas devem ser 4A (12V) ou 2,5A (24V).
NOTA: Para remover a tampa do atuador, um selo deve ser rompido. Isso só deve ser efetuado por pessoal autorizado (ACB275 e ACD175-24 apenas).
A garantia do motor será cancelada se o selo for rompido por pessoal não autorizado.
Se o atuador se mover devagar apesar de o valor da corrente estar correto, a razão para isto deve ser investigada (por exemplo, a cremalheira pode estar sendo obstruída).
Cheque as conexões elétricas se o atuador não se mover. Se as mesmas estiverem corretas e mesmo assim o atuador não se mover, este deve ser substituído.
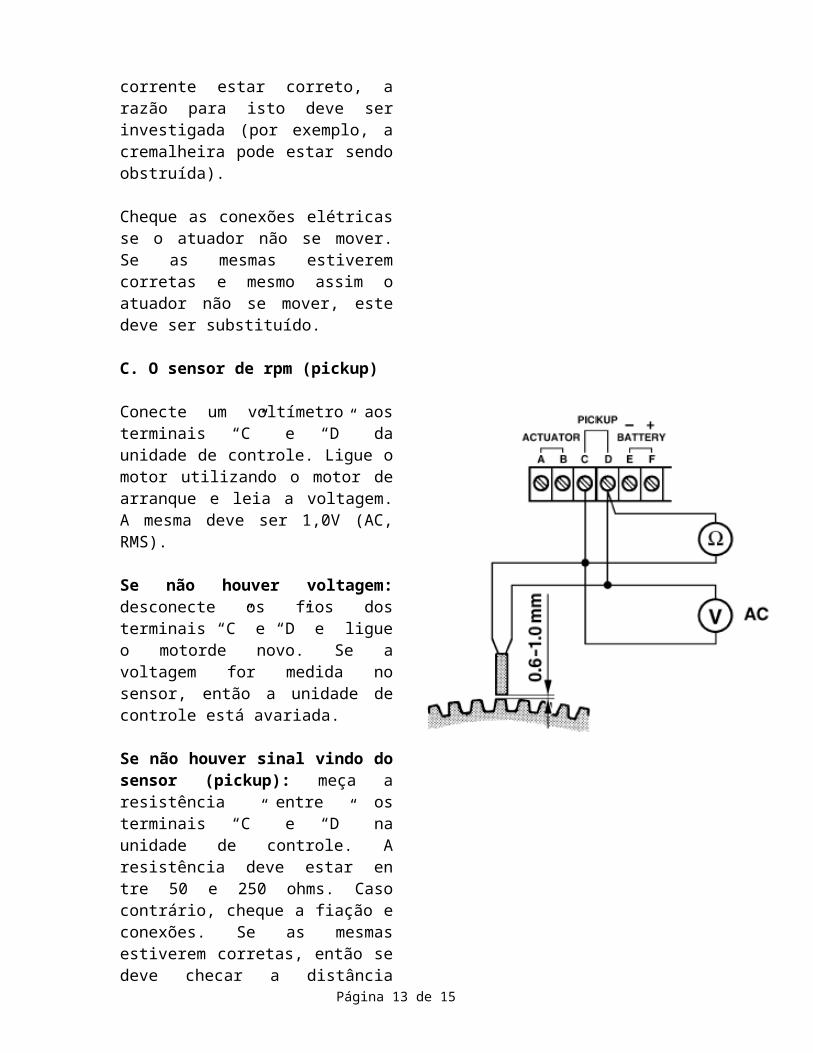
C. O sensor de rpm (pickup)
Conecte um voltímetro aos terminais “C” e “D” da unidade de controle. Ligue o motor utilizando o motor de arranque e leia a voltagem. A mesma deve ser 1,0V (AC, RMS).
Se não houver voltagem: desconecte os fios dos terminais “C” e “D” e ligue o motorde novo. Se a voltagem for medida no sensor, então a unidade de controle está avariada.
Se não houver sinal vindo do sensor (pickup): meça a resistência entre os terminais “C” e “D” na unidade de controle. A resistência deve estar en tre 50 e 250 ohms. Caso contrário, cheque a fiação e conexões. Se as mesmas estiverem corretas, então se deve checar a distância entre o sensor e a cremalheira do
Página 9 de 15

volante. A mesma deve estar entre 0,6 e 1,0 mm (3/4 de volta da posição inferior).
Uma redução na distância ocasionará um sinal mais forte (maior voltagem) vindo do sensor.
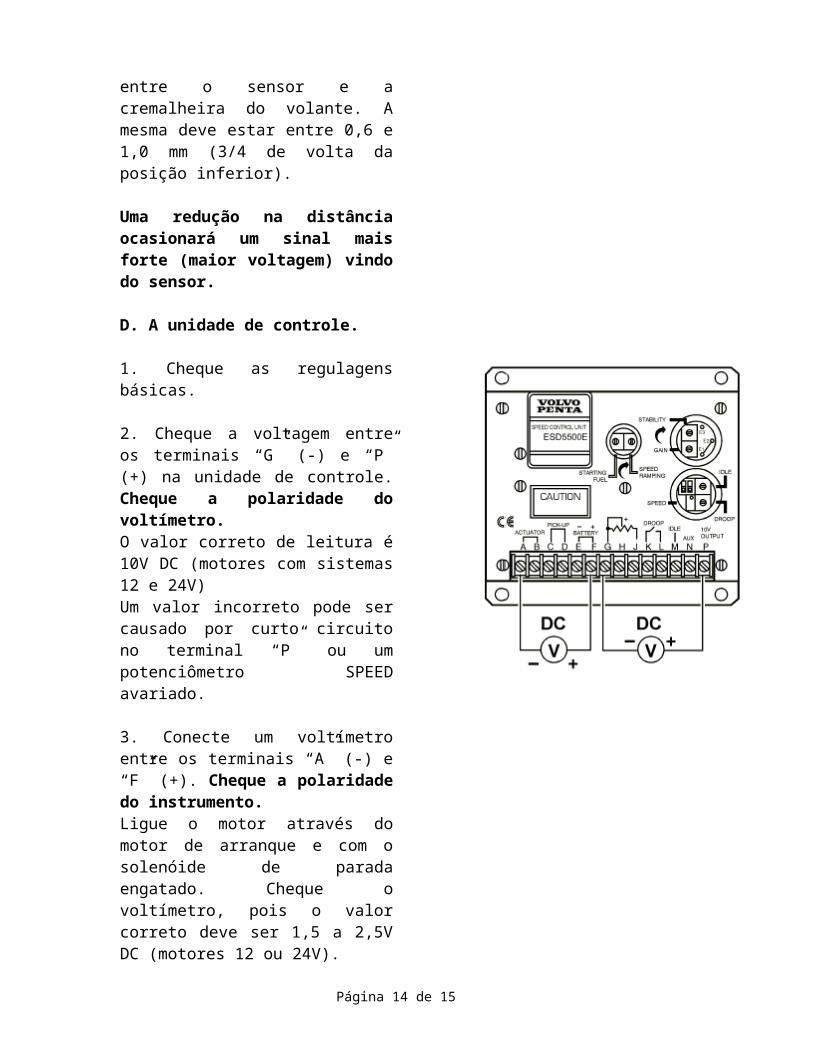
D. A unidade de controle.
1. Cheque as regulagens básicas.
2. Cheque a voltagem entre os terminais “G” (-) e “P” (+) na unidade de controle. Cheque a polaridade do voltímetro.O valor correto de leitura é 10V DC (motores com sistemas 12 e 24V)Um valor incorreto pode ser causado por curto circuito no terminal “P” ou um potenciômetro SPEED avariado.
3. Conecte um voltímetro entre os terminais “A” (-) e “F” (+). Cheque a polaridade do instrumento.Ligue o motor através do motor de arranque e com o solenóide de parada engatado. Cheque o voltímetro, pois o valor correto deve ser 1,5 a 2,5V DC (motores 12 ou 24V).Um valor incorreto pode ser causado por:- Potenciômetro SPEED com regulagem muito baixa;- Ligações elétricas incorretas ao atuador;- Potenciômetro SPEED avariado.
2. O MOTOR ATINGE SOBREVELOCIDADE (DISPARA – OVERSPEED)
Nota: Não ligue o motor.
1. Conecte o suprimento de energia à unidade de controle. O atuador deve se mover à posição de máxima injeção de combustível.2. Meça a voltagem entre “A” (-) e “F” (+) na unidade de controle.Se a voltagem estiver entre 1,0 a 2,0V DC, então:
Página 10 de 15
- O ajuste de velocidade (SPEED) está alto demais;- A unidade está defeituosa;
Se a voltagem for maior que 2,0V DC, então:- Há muita restrição ao curso das alavancas de acionamento do atuador.
Se a voltagem estiver menor que 1,0V DC, então:- A unidade de controle está defeituosa.
Nota: Os valores acima se aplicam a sistemas 12 ou 24V.
3. Desconecte os fios do sensor de rpm entre os terminais “C” e “D”.
- Se o atuador ainda estiver em sua posição de máxima injeção de combustível, então a unidade de controle está defeituosa.- Se o atuador está na posição de mínima injeção, então o sinal de rpm do motor está correto. Cheque o cabeamento entre o sensor e a unidade de controle, e também a blindagem.
3. O MOTOR NÃO ATINGE A VELOCIDADE DESEJADA
1. Meça a voltagem nos cabos das baterias principais quando o motor estiver sendo rodado através do motor de arranque. A voltagem não deve ser menor que 8V para sistemas de 12V ou 17V para sistemas em 24V.
- Carregue/substitua as baterias se a voltagem for muito baixa. Certifique-se de que as baterias não estão sub-dimensionadas.- As ligações para o atuador podem estar incorretas.
2. “Jumpeie” temporariamente os terminais “A” e “F” da unidade de controle. O atuador deve ser deslocado
Página 11 de 15
para a posição demáxima injeção de combustível. Se não for, a causa pode ser:- Ligações incorretas para a unidade de controle vindo da bateria ou do atuador.- Alavancas de acionamento podem estar presas.- Atuador defeituoso.
3. Meça a voltagem no atuador entre os terminais “A” e “B” na unidade de controle na velocidade em que o motor estiver operando.
Se a voltagem estiver até 2V menor que a voltagem na bateria, a falha pode ser provocada por cremalheira emperrada, molas de sobrevelocidade incorretas (aplica-se a governadores RQ), ou alguma alavanca presa entre o atuador e a bomba.
Se o problema persistir após todos estes itens terem sido checados e tudo parecer estar em ordem, tente ajustar o potenciômetro de velocidade “SPEED” .
4. Interferência elétrica e declínio (Droop) indesejado
Se houver equipamentos instalados que emitam ondas de rádio (RFI), como eletro-ímãs, sistemas de ignição do tipo semi-condutor, carregadores de baterias ou outros governadores elétricos, isto pode causar controle instável ou declínio indesejado. A unidade de controle tem filtros internos que promovem alguma proteção contra isto, mas altos níveis de interferência devem ser tratados separadamente. A fonte de interferência deve ser isolada. Além disso, os chicotes para a unidade de controle deve ter seu curso o mais longe possível destas fontes.
O chicote do sensor de conta-giros (pickup) para a unidade de controle deve ser blindado em toda a sua extensão. Note que a blindagem SÓ DEVE SER CONECTADA AO TERMINAL
Página 12 de 15
“TERRA” DA UNIDADE DE CONTROLE, E NUNCA AO PICKUP.
4.CONTROLE INSTÁVEL
O controle instável é um problema que requer especial atenção. Caso isto ocorra, pode existir diversas possíveis razões para este problema. Caso o sistema não funcione satisfatoriamente deve-se responder as seguintes perguntas:
1. Qual a frequência aproximada de instabilidade? (lenta ou rápida)
2. Quais as posições dos potenciômetros “GAIN” e “STABILITY” na unidade de controle.
3. A instabilidade aumenta quando se gira o potenciômetro “GAIN” para a direção horária?
4. A instabilidade desaparece se a rotação do motor é aumentada ou diminuída?
5. A instabilidade aumenta ou diminui quando se aumenta a carga?
6. O que acontece quando se o jumper “A” entre “E1” e “E2” na unidade de controle é cortado?
7. O que acontece se um capacitor adicional (“B”), valor 10F, é conectado entre os terminais “E2” e “E3” de acordo com a figura? OBS! E3 é positivo (+).
8. O sistema completo do governador, incluindo todos os componentes move-se suavemente sem prender ou engripar ?
9. A corrente do atuador foi medida de sem carga até carga total de acordo com a figura ?
Dependendo das respostas para as questões acima, instabilidade pode ser
Página 13 de 15
causada por:
1. Potenciômetros “GAIN” e “STABILITY” ajustados muito alto.
2. Unidade de Controle com sensitividade muito alta com relação a massa e a inércia das unidades movidas.
3.Caso um acoplamento flexível seja conectado, rigidez, folga ou vibração torsocional.
4. A bomba injetora
5. O sistema de ligação
6. O regulador de voltagem do alternador
7. O sinal do sensor.
Página 14 de 15