-
Evaluación experimental del control de motoresde inducción
bajo la condición sensorless
E. Alexandro Alb́ıter-Alṕızar ∗ Hoover Mujica-Ortega ∗
Gerardo Espinosa-Pérez ∗∗ Jaime A. Moreno ∗∗∗
∗ Facultad de Ingenieŕıa - UNAM, Departamento de Control y
Robótica,Edificio P, Lab. Automatización, C.U., 04510, México
CDMX e-mail:
[email protected], [email protected]∗∗ Facultad de Ingenieŕıa -
UNAM, Edificio Posgrado 2do piso, C.U., 04510,
México CDMX e-mail: [email protected]∗∗∗ Instituto de
Ingenieŕıa - UNAM, C.U., 04510, México CDMX e-mail:
[email protected]
Resumen: En este art́ıculo se presenta la evaluación
experimental de la obtención de estadosno medibles del motor de
inducción bajo la condición sensorless. La evaluación se realiza
conla ayuda de un algoritmo fundamentado en un análisis de
observabilidad del motor, el cualestablece la existencia de
trayectorias indistinguibles de ciertos estados (la velocidad,
flujosmagnéticos, y par de carga) cuando sólo se pueden medir
variables de naturaleza eléctrica delestator. Dicho algoritmo
requiere la obtención de la segunda derivada de los voltajes de
estator yla tercera derivada de las corrientes de estator, para lo
cual se emplean métodos de diferenciaciónnumérica que limitan la
amplificación de ruido presente en la medición. Los resultados
muestranque es posible recuperar los pares de trayectorias
indistinguibles a pesar del ruido presente enla medición de las
variables de estator, lo cual posibilita la implementación
experimental deun observador bivaluado que, eventualmente y en
conjunto con información complementaria,permita identificar el
comportamiento actual del motor de inducción.
Palabras clave: Motor de inducción, Control sensorless,
Análisis de observabilidad, Observadorbivaluado, Diferenciador
numérico.
1. INTRODUCCIÓN
Una de las estrategias de control de velocidad delmotor de
inducción (MI) que más interés ha cobradoen las últimas
décadas, tanto en la industria como en lacomunidad de
investigación, es aquella estrategia bajo lacondición sensorless.
Dicho método consiste en realizarel control sin la necesidad de
sensores de variables denaturaleza mecánica colocados en la flecha
del motor,por lo que la información de dichas variables es
estimadaa partir de los voltajes y corrientes del estator,
variablesde dinámica exclusivamente eléctrica.
El uso de controladores de MI en condición sensorlessse ha
expandido en áreas que van desde aplicacionesindustriales hasta
electrodomésticas. En la industria,donde a la condición
usualmente se le llama encoder-less, es común tener que operar un
MI en ambienteshostiles, lo que generalmente requiere eliminar
sensoresde velocidad (Holtz, 2002). Las principales ventajas
delcontrol bajo este esquema radican en bajos costos,
altafiabilidad, reducción de la complejidad del hardware
ne-cesario para realizar el control, mejor sensibilidad anteruido,
y menos mantenimiento de la máquina (Xu et al.,2018). Este tipo de
condición recibe mucha atención dela academia pues abre la
posibilidad de diseñar observa-dores para estimar los estados no
medibles del MI, unamáquina altamente no lineal, por lo que es de
interésabordar este problema y proveer soluciones adecuadas.
Determinar si el MI es observable depende de las con-diciones
bajo las cuales opera la máquina. Si la opera-ción es sensorless
(se desconoce velocidad/posición, parde carga y flujos
magnéticos, y únicamente se midenlas variables de tipo
eléctrico), ciertos estados exhibentrayectorias indistinguibles,
es decir, trayectorias queno resultan en un solo valor. Los
análisis reportadosen (Canudas et al., 2000) e (Ibarra-Rojas et
al., 2004)concluyen que el MI no es local ni globalmente
obser-vable dado el fenómeno de dichas trayectorias. Debidoa que
los valores de las trayectorias indistinguibles sonsoluciones de un
conjunto de ecuaciones diferencialesque describen la “dinámica
indistinguible”del MI, estoimplica que no es posible diseñar un
observador conver-gente (Ibarra-Rojas et al., 2004).
Se han diseñado observadores no lineales de distintostipos:
observadores dinámicos, observadores de alta ga-nancia,
observadores basados en estructuras algebrai-cas, entre otros,
todos ellos mencionados en (Marinoet al., 2010) y (Glumineau and
De-Leon-Morales, 2015).No obstante, estas técnicas poco se
relacionan con losestudios de la observabilidad de la máquina. De
hecho,las estructuras de los estimadores comúnmente omitenla
existencia de las trayectorias inobservables exhibidasen los
análisis de observabilidad. Como consecuencia, elrendimiento de
estos observadores siempre se ve com-prometido cuando operan
sensorless, lo que conlleva lanecesidad de incluir mecanismos
heuŕısticos para evitarcomportamientos indeseables.
Memorias del Congreso Nacional de Control AutomáticoISSN:
2594-2492
Puebla, Puebla, México, 23-25 de octubre de 2019 358
Copyright©AMCA. Todos los Derechos Reservados www.amca.mx
-
En (Moreno et al., 2017) se propone un observador nolineal para
el MI en operación sensorless que involucradirectamente a las
trayectorias indistinguibles previa-mente mencionadas. Basada en
las ecuaciones del mo-delo matemático del motor, la estructura del
estimadorparte de la idea de que las trayectorias
indistinguiblesque presentan los flujos magnéticos, la velocidad,
y elpar de carga siempre aparecen en pares; es decir, que pa-ra
cada valor real de una variable existe una
trayectoriaindistinguible. El observador (denominado
observadorbivaluado) es capaz, en simulación, de: (i) para
trayec-torias distinguibles, mostrar estimaciones correctas delos
valores reales de las variables no medidas del motor,y (ii) para
trayectorias indistinguibles, mostrar estima-ciones correctas de
todas las trayectorias indistinguibles.
Pese a que el análisis teórico de observabilidad ya estáhecho
y probado en (Moreno et al., 2017), es de interésrealizar el
análisis desde un punto de vista experimentala fin de validar su
posibilidad de resolver el problemade control de motores de
inducción bajo el esquemasensorless en una plataforma
experimental. En estesentido, en el presente art́ıculo se presenta
la evaluaciónexperimental del algoritmo para encontrar la
velocidadω (o bien, ambos valores de velocidad) basado en
elanálisis de observabilidad de la máquina, sometiendo alMI a
diferentes escenarios de operación.
El hecho de realizar la evaluación experimental delalgoritmo
añade el problema de presencia de ruidode medición, esto en la
obtención de las corrientes yvoltajes de estator a través de los
sensores utilizadosen los experimentos, lo que se traduce en la
dificultadpara diferenciar las señales sin amplificar el ruido.
Aśı,en los experimentos realizados se emplean métodos
dediferenciación numérica que limitan la amplificación deruido
presente en la medición.
La estructura del art́ıculo es de la siguiente forma: enla
Sección 2 se describe el modelo matemático del MItrifásico y se
plantea el problema del motor en operaciónsensorless. En la
Sección 3 se describe el análisis deobservabilidad basado en la
investigación detallada en(Moreno et al., 2017). En la sección 4
se describe elcontrol empleado para la generación de perfiles
deseadosde velocidad. En la Sección 5 se exponen los métodos
dediferenciación numérica empleados para la obtención
dederivadas temporales de variables medidas. Para validarel
análisis de observabilidad, se muestra una evaluaciónexperimental
en la Sección 6 para encontrar la velocidadω con la ayuda de las
ecuaciones detalladas en la Sección3 y métodos de diferenciación
descritos en la Sección 5.En la última sección se establecen las
conclusiones.
2. MODELO MATEMÁTICO DEL MI
En este art́ıculo se considera el MI trifásico de múlti-ples
pares de polos tipo jaula de ardilla. Se sabe quelas ecuaciones de
dicha máquina eléctrica pueden serrepresentadas en un plano
bifásico ortogonal equivalentepor medio de la transformación
Blondel (Blondel et al.,1913), el cual resulta un marco de
referencia más simplepues se evita la dependencia expĺıcita de la
posición delrotor (Liu et al., 1989). En la literatura, este
modeloes conocido como modelo ab (Meisel, 1984) y está dadopor el
conjunto de ecuaciones:
İs = −γIs +(LsrRrσL2r
)ψr −
(npLsrσLr
)ωJψr +
Usσ(1a)
ψ̇r = −(RrLr
)ψr + (npωJ )ψr +
(RrLsrLr
)Is (1b)
ω̇ =
(1
J
)npLsrLr
ITs Jψr −(B
J
)ω − τL
J(1c)
donde ψr ∈ IR2 es el vector de encadenamientos deflujos
magnéticos del rotor, Is ∈ IR2 el vector decorrientes del estator,
ω la velocidad en el eje del motor,Ls, Lr, Lsr > 0 las
inductancias en estator, rotor ymutua respectivamente, Rs, Rr >
0 las resistenciasen estator y rotor respectivamente, np el número
depar de polos, J > 0 el momento de inercia del rotor,B ≥ 0 el
coeficiente de amortiguamiento mecánico ofricción viscosa, τL el
par de carga externo aplicado aleje del rotor (una señal
desconocida y variante en el
tiempo), Us ∈ IR2 los voltajes de estator, σ̄ = 1− L2sr
LsLrel coeficiente de dispersión o coeficiente de Blondel conσ
= Lsσ̄, mientras que
γ =
(L2srRrσL2r
+Rsσ
), J ,
[0 −11 0
]= −J T
Bajo la operación sensorless, las únicas variables quepueden
medirse son las corrientes Is, y los voltajes decontrol Us. El
control del MI en estas condiciones debediseñarse tomando en
cuenta que los flujos de rotor ψry la velocidad ω no pueden
medirse.
3. ANÁLISIS DE OBSERVABILIDAD
El siguiente análisis de observabilidad parte del realiza-do en
(Moreno et al., 2017), que consistió en encontraruna expresión
matemática para las variables ω, ψ, TLen términos de las
variables medibles, Is y Us, y susderivadas. Para facilitar el
análisis a partir de las ecua-ciones presentadas en la Sección 2,
es posible agruparlos parámetros del motor en varios
términos:
a =RrLr
; b =LrRsLsr
; c =LrLsr
α =npLsrLrJ
; β =LsrLrσ
; f =B
J
Se realiza una manipulación de los términos del con-junto de
ecuaciones (1) con la finalidad de agrupar lasvariables no medibles
en un solo término denominado ρ.
İs = β[ρ− (Lsra+ b)Is + cUs] (2a)ψ̇r = −ρ+ LsraIs (2b)
ω̇ = −Bω + αITs J γ−1ρ−τLJ
(2c)
donde:γ = aI − npωJ (3)
y de la cual:
I =[1 00 1
].
Asimismo:ρ = γψr (4)
Puebla, Puebla, México, 23-25 de octubre de 2019 359
Copyright©AMCA. Todos los Derechos Reservados www.amca.mx
-
y, por ende:ψr = γ
−1ρ (5)
La ventaja del conjunto de ecuaciones (2) es que elcambio de
variables separa a las variables medibles delas no medibles y se
puede encontrar una relación entreellas al indagar en la dinámica
de ρ.
Dado que ρ representa un producto, su derivada puedeescribirse
como
ρ̇ = γψ̇r − γ̇ψrρ̇ = γψ̇r − npω̇Jψr (6)
Multiplicando (6) por ψTr y sabiendo que ψTr Jψr = 0:
ψTr ρ̇ = ψTr γψ̇r − ω̇ψTr npJψr
ψTr ρ̇ = ψTr γψ̇r (7)
Sustituyendo la ecuación (5) en (7), se tiene que:
ρT γ−T ρ̇ = ρT γ−T γ[−ρ+ LsraIs] (8)
El desarrollo de las ecuaciones que prosigue requiere
demanipular γ y su valor inverso transpuesto, y cuadráti-co. De la
ecuación (3) se tiene que:
γ−1 =1
a2 + n2pω2
(aI + npωJ )
γ−T =1
a2 + n2pω2
(aI − npωJ )
γ−T =1
a2 + n2pω2
(γ) (9)
γ2 = (a2 − n2pω2)I − 2anpωJ (10)
Ahora, sustituyendo (9) en (8):
1
a2 + n2pω2ρT γρ̇ =
1
a2 + n2pω2ρT γγ[−ρ+ LsraIs]
ρT γρ̇ = ρT γ2[−ρ+ LsraIs] (11)Y sustituyendo (10) en (11) se
tiene:
ρT (aI−npωJ )ρ̇ = ρT [(a2−n2pω2)I−2anpωJ ][−ρ+LsraIs]Por lo
tanto:
aρT ρ̇− npωρTJ ρ̇ = −a2ρT ρ+ n2pω2ρT ρ+a3Lsrρ
T Is − n2pω2LsraρT Is−2a2LsrnpωρTJ Is (12)
Nótese que la ecuación obtenida posee una formacuadrática y
de ella se puede extraer ω. En efecto, laecuación (12) puede
reescribirse como sigue:
(ρT ρ− LsraρT Is)︸ ︷︷ ︸A
n2pω2
+(−2a2LsrρTJ Is + ρTJ ρ̇)︸ ︷︷ ︸B
npω
+(a3LsrρT Is − a2ρT ρ− aρT ρ̇)︸ ︷︷ ︸
C
= 0
de la cual es posible obtener dos valores de la velocidadω que
satisfacen la ecuación:
ω =−B ±
√B2 − 4AC
2A(13)
De esta ecuación, en (Moreno et al., 2017) se concluyeque es
posible establecer una relación entre variables
medibles y no medibles, pues se puede obtener ω entérminos de
las variables Is, ρ, y ρ̇, que a su vezpueden extraerse de las
mediciones de Is y Us, ysus respectivas derivadas. Asimismo, se
concluye queexisten dos posibles situaciones con las cuales se
puedeobtener ω:
1. Caso distinguible: la ecuación (12) tiene una
únicasolución. Esto implica que la trayectoria real delsistema es
distinguible y la solución a la ecuacióncorresponde al valor
real.
2. Caso indistinguible: La ecuación (12) posee dossoluciones.
En este caso, las trayectorias son indis-tinguibles y ambas
soluciones corresponden a dosposibles valores de la velocidad real.
Es imposibledecidir qué solución coincide con el valor real si
sólose tiene información de las variables medibles.
4. CONTROL BASADO EN PASIVIDAD
La evaluación requiere generar perfiles de velocidaddeseados
excitando a la máquina con voltajes determi-nados. Para la
generación de dichos voltajes, se con-sidera el controlador basado
en pasividad (PBC) nolineal para el seguimiento de velocidad y
norma de flujosmagnéticos de rotor, espećıficamente ĺımt→∞
|ω−ωd| =0 y ĺımt→∞ |‖ψr‖−‖ψrd‖| = 0, donde ωd es la
velocidaddeseada y ‖ψrd‖ la norma de flujos magnéticos de
rotordeseada. La forma del controlador da indicio de que enlos
experimentos se ejecutó un control realimentado, sinembargo, la
acción de control fue empleada para generarlos perfiles de
velocidad en el MI en lazo abierto.
Considerando al modelo del MI descrito en (1) se defineel error
de estados y su dinámica como
e = x− xd =⇒ ė = ẋ− ẋd (14)donde el vector de estados x ,
[ITs , ψ
Tr , ω]
T ∈ R5. Porlo tanto, el vector de estados deseados se establece
comoxd , [ITsd, ψ
Trd, ωd]
T . La estructura de la ley de controlaplicada a los voltajes de
estator está dada por
Us = σİsd +npLsrLrJωdψrd +
(L2srRrL2r
+Rs
)Isd
−LsrRrL2r
ψrd −KIseIs , (15)
donde se incluye un término de amortiguamiento cons-tante KIs
en el error de corrientes eIs , además el vectorde corrientes
deseadas de estator está dado por
Isd =Lr
RrLsr
(ψ̇rd − npωdJψrd +
RrLrψrd
), (16)
mientras que los flujos de rotor deseados variantes en eltiempo
se obtienen como solución del sistema dinámico
ψ̇rd =
[npωd +
Rrnpβ2
τd
]Jψrd+
β̇
βψrd, ψrd (0) =
[β0
],
(17)el par electromagnético deseado τd se define como
τd = Jω̇d +Bωd + τ̂L −Kωeω, (18)donde
τ̂L = −Kωi∫eωdt, Kωi > 0, τ̂L(0) = 0. (19)
La derivada temporal de Isd requerida para la imple-mentación
de la ley de control (15) se obtiene anaĺıtica-mente y está dada
por
Puebla, Puebla, México, 23-25 de octubre de 2019 360
Copyright©AMCA. Todos los Derechos Reservados www.amca.mx
-
İsd =Lr
Lsrnp
[(τ̇d − 2τdβ̇
β
)Jψrd +
(τdβ2
)J ψ̇rd
]
+Lr
RrLsr
[(β̈β − β̇2
β2
)ψrd +
(β̇
β
)ψ̇rd
]+ψ̇rdLsr
,
(20)al igual que la derivada temporal de τd, definida por
τ̇d = Jω̈d +Bω̇d + ˙̂τL −Kω ėω. (21)
5. MÉTODO DE DIFERENCIACIÓN NUMÉRICA
La evaluación experimental requiere de medir solamentelos
valores de corrientes y voltajes de estator, por loque es necesario
estimar correctamente las derivadasde dichas variables a fin de
computar con fiabilidad elalgoritmo de observabilidad.
En (Mujica-Ortega and Espinosa-Pérez, 2015) se propo-ne un
método de diferenciación numérica que es llamadodiferenciador
sucio de tercer orden, el cual es usadopara estimar velocidad y
aceleración de rotor de unMI a partir de la posición medida por
un codificadorincremental. La mayor ventaja que ofrece este tipo
dediferenciador es un buen desempeño dinámico, debidoa que su
estructura se asemeja a una cadena de inte-gradores, obteniendo una
versión de velocidad de rotorcon menos ruido y de la cual pueden
calcularse susrespectivas derivadas de forma exacta.
En el caso de este trabajo, se propone el uso delmismo método
de diferenciación mencionado pero paraestimar las derivadas de las
variables medibles del MI enrestricción encoderless, es decir los
voltajes y corrientesde estator. El método está descrito por:
ż1 = z2 (22a)
ż2 = z3 (22b)
ż3 = −λ3z1 − 3λ2z2 − 3λz3 + λ3η
donde η representa la variable de naturaleza eléctricamedida en
las terminales del motor (es decir, cadaelemento de los vectores de
corrientes Is y Us, querepresentan el valor en cada fase), z1 la
misma variablepero filtrada, η̇ = z2 la primera derivada de la
variable,η̈ = z3 la segunda derivada de la variable, con
[z1(0) z2(0) z3(0)]T
= [η(0) 0 0]T.
Dado que este método está fundamentado en un sistemadinámico
lineal, es necesario conocer la condición bajo lacual existe
estabilidad en dicho sistema. La condición esλ > 0, pero como
primera aproximación se recomiendaasignar λ mayor a dos veces el
valor máximo de lafrecuencia de las variables de ı́ndole
eléctrica, aśı sepreserva el contenido frecuencial de la señal
de entrada.Note, que conforme λ→∞, este método será una
mejoraproximación al operador derivada, por lo tanto mássensible
al ruido (Mujica-Ortega and Espinosa-Pérez,2015).
6. EVALUACIÓN EXPERIMENTAL
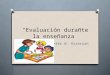
El propósito de esta sección es ilustrar, con
resultadosobtenidos de una plataforma experimental, cómo es
que
Figura 1. Plataforma experimental.
se producen trayectorias indistinguibles para las varia-bles de
tipo mecánico que no pueden medirse cuandośı es posible medir las
de clase eléctrica. Todos losresultados mostrados en esta sección
fueron obtenidosaplicando distintas señales de voltajes
(provenientes dela ley de control (15)) para dos diferentes
perfiles develocidad. Es importante mencionar que no se
consideróla posibilidad de variación paramétrica en el
modelopara la ejecución del algoritmo de observabilidad.
6.1 Condiciones de evaluación
Los experimentos realizados fueron implementados conuna tarjeta
dSPACE 1104 y un MI tal y como se muestraen la Figura 1, donde se
aprecia el motor de inducción,además el sensor de par conectado
al eje del rotor y unfreno de part́ıculas de polvo magnético. En
la Tabla 1,se muestran los parámetros del MI.
Tabla 1. Parámetros motor de inducción
Voltaje / potencia nominal 220 V / 1 HP
Par de polos np = 2
Resistencia de estator Rs = 2.516 Ω
Resistencia de rotor Rr = 1.9461 Ω
Inductancia de estator Ls = 0.2340 mH
Inductancia de rotor Lr = 0.2302 mH
Inductancia mutua Lsr = 0.2226 mH
Fricción viscosa B = 1.1 × 10−4 N·m·s/radCoeficiente momento de
inercia J = 6.04675 × 10−3 kg·m2
Para ambos escenarios de evaluación, se utilizó unaλ = 600
para el diferenciador sucio de tercer orden.Los tiempos de los
experimentos fueron de 35 segundos,y el método de solución
numérica empleado fue ODE4(Runge-Kutta), con una frecuencia de
muestreo de 0.1ms. Las ganancias del controlador PBC se
eligieroncomo KIs = 0, Kω = 0, y Kωi = 0, pues la acciónde control
(15) se empleó en lazo abierto.
6.2 Experimento 1
En el primer escenario de evaluación se afirma lo pro-puesto en
(Moreno et al., 2017): con la restricción sen-sorless, los estados
del MI exhiben trayectorias indistin-guibles que existen en pares,
es decir que para un valorreal del estado existe otra trayectoria
indistinguible.
Resulta claro que bajo esta condición, las únicas varia-bles
medibles son las corrientes de estator, mostradas
Puebla, Puebla, México, 23-25 de octubre de 2019 361
Copyright©AMCA. Todos los Derechos Reservados www.amca.mx
-
0 5 10 15 20 25 30 35Tiempo [s]
-5
-4
-3
-2
-1
0
1
2
3
4
5
Cor
rient
es d
e es
tato
r [V
]
Figura 2. Escenario 1: corrientes de estator medidas.
0 5 10 15 20 25 30 35Tiempo [s]
-300
-200
-100
0
100
200
300
Vol
taje
s de
est
ator
[V]
Figura 3. Escenario 1: voltajes de estator medidos.
0 5 10 15 20 25 30 35Tiempo [s]
-150
-100
-50
0
50
100
150
Vel
ocid
ad [r
ad/s
]
Figura 4. Escenario 1: velocidad real y
velocidadesestimadas.
0 5 10 15 20 25 30 35Tiempo [s]
-5
-4
-3
-2
-1
0
1
2
3
4
5
Par
[Nm
]
Figura 5. Escenario 1: par de carga real y pares de
cargaestimados.
en la Figura 2, y los voltajes de estator, mostrados enla Figura
3.
0 5 10 15 20 25 30 35Tiempo [s]
-5
-4
-3
-2
-1
0
1
2
3
4
5
Cor
rient
es d
e es
tato
r [V
]
Figura 6. Escenario 2: corrientes de estator medidas.
En la Figura 4, se muestra el valor estimado de velocidadω por
dos trayectorias distintas, de las cuales unade ellas es una
estimación correcta cuando la otraes indistinguible, tal y como se
esperaba del análisismostrado en la Sección 3. Efectivamente, el
hecho deque una sea una estimación correcta de la variable ω yla
otra represente una trayectoria indistinguible es unasituación que
conmuta dependiendo del valor real develocidad. Con propósito de
comparación, se midió lavelocidad con un sensor tipo encoder.
Es importante notar, la incapacidad del algoritmo deestimar
velocidades ante la presencia de ruido causadopor los sensores de
las variables medibles cuando elvalor A de la ecuación (13) se
acerca a cero, que comoconsecuencia podŕıa generar una
singularidad. Estalimitación se podŕıa ver acentuada si las
medicionespresentan mayor ruido.
También es importante resaltar que las estimaciones
seencuentran ligeramente defasadas con respecto al valorreal de
velocidad, esto debido al filtro que representa elsistema dinámico
lineal del diferenciador sucio descritoen la ecuación (22). La
consecuencia más notoria deeste aspecto es la poca exactitud de
estimación deτL, cuya medición del valor real en conjunto con
laestimación de su valor se muestran en la Figura 5. Elpar de
carga resultante proviene de energizar el freno depart́ıculas de
polvo magnético que genera fricción en laflecha del MI cuando
este se mueve. Sin embargo, esteerror de estimación no se
considera sustancial al poderser compensado si es que al algoritmo
se le añade uncontrolador retroalimentado.
6.3 Experimento 2
En el escenario de evaluación 2 se optó por un perfil
develocidad de forma sinusoidal. Las corrientes y voltajesde
estator se muestran en la Figura 6 y Figura 7respectivamente. La
estimación de velocidad se muestraen la Figura 8, mientras que la
de par de carga semuestra en la Figura 9.
Los resultados obtenidos para el segundo perfil develocidad,
aśı como los del primero, demuestran que conla restricción
sensorless, ciertas variables del MI exhibentrayectorias
indistinguibles que vienen en pares, es decirque para un valor real
de la variable inobservable existeotra trayectoria
indistinguible.
Puebla, Puebla, México, 23-25 de octubre de 2019 362
Copyright©AMCA. Todos los Derechos Reservados www.amca.mx
-
0 5 10 15 20 25 30 35Tiempo [s]
-300
-200
-100
0
100
200
300
Vol
taje
s de
est
ator
[V]
Figura 7. Escenario 2: voltajes de estator medidos.
0 5 10 15 20 25 30 35Tiempo [s]
-150
-100
-50
0
50
100
150
Vel
ocid
ad [r
ad/s
]
Figura 8. Escenario 2: velocidad real y
velocidadesestimadas.
0 5 10 15 20 25 30 35Tiempo [s]
-5
-4
-3
-2
-1
0
1
2
3
4
5
Par
[Nm
]
Figura 9. Escenario 2: par de carga real y pares de
cargaestimados.
7. CONCLUSIONES
La evaluación experimental presentada en este art́ıculoconfirma
la factibilidad de estimar las variables no medi-bles del motor de
inducción en el esquema sensorless, apartir de la medición de sus
variables de ı́ndole eléctrica,aśı como de la obtención de los
valores de sus derivadas.Se mostró que el análisis teórico de
observabilidad en elque se fundamentó el algoritmo de estimación
es aptopara implementarse en una plataforma experimental. Elmétodo
de diferenciación empleado contribuyó al análi-sis de
observabilidad al aportar una buena estimaciónde las derivadas
temporales de las variables medibles(las corrientes y voltajes de
estator).
Si bien se realizó una buena estimación de las velocida-des en
cuanto a magnitud, el método de obtención de lasderivadas genera
desfase en el tiempo. Este inconvenien-
te se ve reflejado, en mayor medida, en la estimación delos
valores de par de carga. Los errores en estos últimoscálculos, no
obstante, pueden ser compensados con laayuda de un controlador;
otra posibilidad es emplearotros métodos de diferenciación
numérica que puedancompensar el desfase natural que producen los
sistemasdinámicos empleados para la atenuación de ruido.
Los resultados obtenidos no identifican el comporta-miento real
de las variables no medibles pues exhibentrayectorias
indistinguibles, lo cual afirma que el sistemano es observable. No
obstante, es posible proveer esti-maciones de estas variables si se
extrae información delas medibles y aśı poder identificar si
estas correspondenal comportamiento real del motor. Este escenario
abrela posibilidad, en un trabajo futuro, de implementar
unobservador bivaluado, con capacidad de identificar
elcomportamiento actual del motor de inducción, si selogra
determinar cuál de las dos trayectorias es la deinterés
f́ısico.
AGRADECIMIENTOS
Los autores agradecen a la DGAPA-UNAM por el apoyobrindado en el
Programa UNAM-PAPIME PE114419.E. Alexandro Alb́ıter-Alṕızar
agradece la beca de licen-ciatura recibida.
REFERENCIAS
Blondel, A., Mailloux, C., and Adams, C. (1913). Syn-chronous
motors and converters: theory and methodsof calculation and
testing. McGraw-Hill Book Com-pany.
Canudas, C., Youssef, A., Barbot, J., Martin, P., andMalrait, F.
(2000). Observability conditions of induc-tion motors at low
frequencies. volume 3, 2044 – 2049vol.3.
10.1109/CDC.2000.914093.
Glumineau, A. and De-Leon-Morales, J. (2015). Sen-sorless AC
Electric Motor Control; Robust AdvancedDesign Techniques and
Applications. Springer.
Holtz, J. (2002). Sensorless control of induction motordrives.
In Proceedings of the IEEE, volume 90.
Ibarra-Rojas, S., Moreno, J., and Espinosa-Pérez, G.(2004).
Global observability analysis of sensorlessinduction motor.
Automatica, 40.
Liu, X.Z., Verghese, G.C., Lang, J.H., and Onder, M.K.(1989).
Generalizing the blondel- park transformationof electrical
machines: Necessary and sufficient condi-tions. IEEE Transactions
On Circuits And System,36(8).
Marino, R., Tomei, P., and Verrelli, C. (2010). InductionMotor
Control Design. Springer-Verlag, London.
Meisel, J. (1984). Principles of
electromechanical-energyconversion. R.E. Krieger.
Moreno, J., Mujica-Ortega, H., and Espinosa-Pérez, G.(2017). A
global bivalued-observer for the sensorlessinduction motor.
Mujica-Ortega, H. and Espinosa-Pérez, G. (2015). Eva-luación
de diferenciadores numéricos para la obten-ción de velocidad y
aceleración en control de motoreseléctricos. AMCA 2015.
Xu, D., Wang, B., Zhang, G., Wang, G., and Yu, Y.(2018). A
review of sensorless control methods forac motor drives. In CES
Transactions on ElectricalMachines and Systems, volume 2.
Puebla, Puebla, México, 23-25 de octubre de 2019 363
Copyright©AMCA. Todos los Derechos Reservados www.amca.mx