Embed Size (px)
Citation preview

Krajnji obračun
Krajnji obračun (izvedeno je iz "svodjenja racuna, ili vam obracunavanja“ plovnih dana) je jednostavan matematički postupak za utvrđivanje trenutnog mesta broda (plovila) pounapredjenju prethodnih pozicija kroz vec utvrdjen pravac, kao i utvrdjivanje brzine informacija tokom odredjenog vremenskog perioda (Dunlap i Shufeldt, 1972). Koncept je biomehanički primenjen na automobilske navigacije već 1910.godine, kada je Dzonsova ziva karta predstavljena (reklamirana) kao sredstvo zamene papirnih karti, i otklanjanje napora vezanih za pronalazenje puta (lociranje), (Catling1994). Ovaj vrlo primitivni, alipionirski sistem rotacije tocka, racunao se da izvedemo uzduzni pomak ukljucujuci i sifrarnik tarnog pogona upravljaca (volana) za izracunavanje tarifnog broja, i upravo zbog toga je to predmet celokupnih gresaka koje nisu dopustile njegov krajnji uspeh. Velika većina kopnenih pokretnih robotskih sistema koji se upotrebljavaju danas, oslanjaju se na vrlo slične potpune sheme za obračun, da formiraju okosnicu njihove navigacijske strategije, ali kao i njihovim nautičkim podudarnicima, koji se povremeno nuliraju iz akumuliranih greski koje se vracaju sa „popravki“ iz udruzenja navigacijske pomoci.
Najjednostavnija implementacija smanjenog obračuna ponekad se nazivaodometrija (broj predjenih kilometara), terminologija koja podrazumeva premeštanje, pomeranje vozila na putu putovanja i koja direktno proizlazi iz nekog brodskog "brojača kilometara", kao u slučaju Dzonsove zive karte. Zajedničko sredstvo odometrijske instrumentacije uključuje optičke šifrarnike direktno povezane sa motornim armaturama ili osovinama tockova/volana. U spoljasnjoj upotrebi, magnetni senzori blizine se ponekad koriste za opazanje malog, stalnogmagneta (ili magneta) povezanih (prikacenih) za poognska vozila, kao sto se obicno vrsi u automobilskoj industriji za snabdevanje povratne brzine tempomat opreme. Alternativno, induktivni senzori su sluzili za otkrivanje zubaca (zupcanika) na tockovima (upravljacima) ili pojedinacih delova neosetljive staze, kada nijedno rotaciono vratilo nije povoljno izlozeno, sto je cesto slucaj konvencionalnom, ne-drumskom opremom.
2.1.1. Potenciometri (mera či potencijala )
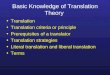
Potenciometri, ili skraćeno „potovi“, se često koriste kao jeftina rotaciona pomeranja senzora u malim brzinama, osrednje tačnosti programa, pri tom ne uključujući kontinuiranu rotaciju. (Npr. i ROBART I i ROBART II koriste precizne potenciometre za usmeravanje vodeće PAN pozicije). Princip funkcionisanja navedenog je promenljiva otpornost naponskog količnika (slika 2-1), gde je izvorna slavina (centralni izvor) mehanički spojen brisač koji se kreće preko elementa otpora zajedno sa rotacionom osovinom. Raznovrsnost (sorta, vrsta) odnosa (smanjivanja) definišući otpor kao funkciju pomeranja brisača su primenjivani (upotrbljivani) u proizvodnji (proizvođenju) potenciometara (tj. Audio, logaritamski, sinusoigalni, linearni) sa linearnim sužavanjem (smanjenjem) kao najčešćom šemom u poziciji očitavanja programa. Slika 2-1.
Za potenciometar sa linearnim sužavanjem izlazni napon (Vo) je direktno povezan sa srazmerom trenutnog (stvarnog) i punog pomeranja skale.

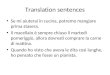
Prednosti principa potenciometarskih senzora su veoma niska cena i jednostavnost povezivanja (interfejsa). Regulisani jednosmerni napon se primenjuje preko celog otpora R, kao što je i prikazano. Izlazni napon je dat jednačinom, gde je: Vo=izlazni napon iz brisačaVref=referentni napon potenciometrar=brisači zemljinog otporaR=ukupna otpornost potenciometra.Za uređaje sa linearnim sužavanjem, koeficijent r/R je upravo jednak odnosu stvarnog i punog (potpunog) pomeranja brisača, pri tom zanemarujući mnoge efekte. Pošto je izlazni napon takođe linearna funkcija referentnog napona Vref, treba povesti računa o regulisanju buke u slobodnoj ponudi.Potenciometri namotani žicom mogu da pokazuju (u delovima) delimično merenje u performansama, kao što je prikazano na slici 2-2, s obzirom da otpor nije učestalo (stalno) promenljiv, ali umesto toga, postepeno je izašsao kao rezultat „KALEM“ dizajna (Fraden 1993). Pored toga, brisači će privremeno skratiti susedne namotaje (navojke) u prolazu, time menjajući ukupan efektivan (delotvoran) otpor. Najbolji precizni potenciometri s toga upotrebljavaju kontinuirani otporni sloj proizveden od uglenika, provodne plastike ili mešavine keramike i metala poznatog kao KERMET. Dok potenciometar dobrog kalema može da proizvede prosečnu rezoluciju od oko 0,1% pune skale, visokog kvaliteta uređaja otpornog filma, koji su generalno ograničeni proizvodnim tolerancijama, pri tom regulišući jednoličnost otpornog elementa (Fraden, 1993).
Slika 2-2.
Klizni brisači (A) mogu naizmenično dolaziti u kontakt sa jednom ili dve žice istovremeno, uvođenjem izlazne neodeđenosti, u (B), u slučaju kalema potenciometra (adaptirano od Fradena, 1993). Pored značajnog otpornog prenosivog opterećenja na osovine, osnovni nedostatak potenciometraje njihova relativno slaba pouzdanost shodno nagomilavanju prašine i neizbežno habanje brisača, što se manifestuje bučnim i nepravilnim radom. Ostale greške mogu biti labavost i/ili elastičnost pri kružnoj vožnji, ukoliko nije direktno vezan za osovinu, kao i električna buka u analognoj izlaznoj liniji. Iz ovih razloga, upotreba potenciometra kao rotacionih, senzornih uređaja je opala poslednjih nekoliko godina u korist mnogosvestranih inkrementalnih optičkih enkodera, koji će biti razmatrani u odeljku 2.1.3.
2.1.2. Sinhronizeri i rezolveri (uređaji za rešavanje) rezolucije.
Sinhronizeri su rotacioni mehanički uređaji koji se koriste za prenos informacija elektronskim putem sa jednog mesta na drugo, sa velikom preciznošću (Švarc i Grafštajn, 1971). U suštini (zapravo), sinhronizer oblikuje (formira) promenljive spojnice transformatora koji se sastoji od AC-pobuđenih namotaja rotora primarno i namotaja dva ili više statora (sekundarno) simetrično raspoređenih oko rotora. Efektivno magnetna spojnica između namotaja rotora i okolnih namotaja statora, varira u zavisnosti od orjentacije rotora. Maksimalna spojnica se javlja kada su polja rotora i statora paralelna, dok minimalna spojnica proizilazi kada je polje rotora pravougaono postavljeno u odnosu na pojedine namotaje statora. Kao posledica toga, učinak

(proizvod) statora formira skup AC signala čije odgovarajuće veličine jedinstveno definišu ugao rotora, u bilo kom datom trenutku. Postoje različite vrste sinhro tipova, i to: -Predajnici – Kontrolni transformatori -Diferencijali – Uređaji za rešavanje (rezolveri)-Prijemnici – Diferencijalni rezolveri - Linearni transformatori i - TranzolveriDeirmegian (1990 a) pruža sveobuhvatan postupak teorije operacija (izvedbi) za gore navedene komponente, praćene ispitivanjem različitih parametara dizajna i izvora greške koja se mora uzeti u obzir (1990 b). Najpoznatija sinhrona konfiguracija je verovatno trofazni par predajnika/prijemnika koji se često koristi za daljinsko upravljanje ugaonih osovina. Rad sinhro prijemnika je električno identičan glavnom prijemniku i povezan je tako da su namotaji statora za oba uređaja u paraleli, kao što je prikazano na slici 2-3. Namotaj rotora i na predajniku i prijemniku za daljinsko upravljanje reaguju na AC struju (400 Hz do nekoliko KHz), i obično se dobija putem kliznih prstenova. Kada su rotori prijemnika i predajnika identično usklađeni sa njihovim namotajem statora, pojedinačni proizvodi (rezultati) statora će biti jednaki za oba uređaja a samim tim neće biti ni protoka struje.
Slika 2-3.
Šematski prikaz tipičnog daljinskog indikatora sinhrone konfiguracije (uzeto od Švarca i Grafštajna, 1971). Nekoliko je osovina predajnika rotora pokrenuto nekom spoljnom silom ravnoteža prethodno navedena dva će biti narušena, što će proizvesti različiti napon, i time stvoriti strujne tokove u obe grupe (namotaja) statora. Ovi strujni tokovi izazivaju identičan (jednak) obrtni momenat u oba rotora, ali pošto je predajnika rotora oraničen, obrtni momenat na rotoru prijemnika deluje tako da ponovo uspostavi centriranje, a time i ravnotežu (Dirmengian, 1990 a). Primetni efekat je učinak prijemnog namotaja koji će precizno pratiti bilo koje rotaciono pomeranje primećenih od strane udaljenih predajnika ulaznih namotaja. Više od jednog predajnika može biti upravljano zajedničkim predajnikom. Npr., mornarički brodovi su opremljeni sa velikim brojem vodećih udaljenih indikatora (upravljački žiro repetitori), koji se nalaze u kormilarnici, u luci i (desnom krilu mosta), sve do signalnog mosta (na brodu) , dok je sam žiro duboko ugrađen unutar broda da smanji efekte kretanja bodova (tj. Nagib i ljuljanje). Rezolver je specijalna (posebna) konfiguracija sinhroma koja razvija napone proporcionalne sinusu i kosinusu uglu rotora, pa se često koristi da razvije količinu vektora u njegovim povezanim komponentama. Tipičan primer se da videti u vazduhoplovnoj industriji gde se rezolveri koriste za izvođenje koordinatnih transformacija između aviona i referentnih okvira baziranih na zemlji.Samo dve zavojnice (kalema) statora su uključene usmerene na 90 stepeni odvojeno od onoga što je prikazano na slici 2-4 (Tivori, 1993). Pojedinačni učinci statora kao funkcija ulazne eksitacije i rotorska pozicija 9, dati su u sledećim jednačinama (ILC, KMP 1982): Vx=Kx sin 0 sin (cor+ax)Vy=Ky cos 0 sin (ciM+ay)Gde je: 0=uređaju za rešavanje (rezolver) ulaznog osovinskog uglaCo=2nf, gde je eksitacija zapravo frekvencija

Kx i Ky su idealno jednake transfer-funkcionalne konsonante, ax i ay su vremenski nulirane rotacije između ritira u statora.
Slika 2-4.
Izlazi (učinci) dva ortogonalna namotaja statora u uređaju za rešavanje (rezolveru) su proporcionalni sinusu i kosinusu primenjene eksitacije rotora (prilagođeno od Tivorija, 1993). Definitivna (konačna) matematička veza je sadržana u izlaznim signalima uređaja za rešavanje (rezolverima), što znači da predajnik može da se koristi samostalno (tj. Bez “vezanog” prijemnika), kao i ulazni transduktor u digitalnom kontrolnom sistemu. Rezolver (uređaj za rešavanje digitalnih konvertora (RDC, tj. RDK) je uključen (aktiviran) na mestu prijemnika da transformiše izlazne signale u odgovarajući format za kompjutersku povezanost (spoj). Ovo pretvaranje se obično vrši na jednom od 3 načina: 1) Pristup promeni faze 2)pristup odnosa amplitude, ili 3) Multipleks pristup. Grendner i Lauton (1986) daju odličan pregled i poređenje ove 3 tehnike, od kojih je pristup odnosa amplituda, čini se postao najpopularniji u praksi. ISN 4 lubridna faza za praćenje rezolvera (uređaja za rešavanje) digitalnih konvertora (RDK) od analognih uređaja, daje posebnu izlaznu brzinu pored potpune (apsolutne) pozicije (položaja) podataka (Nikson, 1985).Ukratko, uređaji za rešavanje (rezolveri), nude veoma snažna i pouzdana sredstva za kvantifikovanje apsolutne ugaone pozicije, koji je tačan, umereno jeftin i relativno mali u smislu fizičke veličine. Pojavom carinski integrisanih kola velikih razmera (LSI), smanjen je trošak vezan za elektroniku, što uređaje za rešavanje (rezolvere) čini konkurentnim u odnosu na druge alternative (Grander i Lauton, 1986). Nečetkaste verzije uključuju posebne (specijalne) cilindrične transformatore, umesto kliznih prstenova, sve do AC pobuđaja na rotor, kao što je prikazano na slici 2-5 (Nickson, 1985). Ove konfiguracije su neizdržive i neodržive, ali imaju trošak potrošnje dodatne energije i povećanu dužinu.
Slika 2-5.
Nečetkasti uređaji za rešavanje problema uključuju rotirajući transformator umesto kliznih prstenova do određenog pobuđaja energije do rotora i nije ih potrebno održavati (uyeto od Nickson-a, 1985).
2.1.3.OPTIČKI ENKODERI
Prvi optički enkoderi su bili razvijeni sredinom ’40-ih godina. Razvio ih je Boldwin Pijano. Osnovao je kompaniju za upotrebu zvučnih „točkova“ (upravljača) koji su omogućavali električnim orguljama da imitira druge muzičke instrumente (Ageut, 1991). Današnji savremeni uređaji u suštini predstavljaju minijaturizovanu verziju funkcionisanja udaljenih senzora (vidi poglavlje 3). Fokursirani snop svetlosti uperen na podudarni fotodetektor koji je kodirana providna ili neprovidna šara (model) periodično prekida na rotirajućem srednjem disku, koji je pričvršćen za vratilo. Rotirajući disk može da zadobije oblik hroma na staklu, ugraviranom metalu ili fotoplastu kao što je Milar (Henkel, 1987). Srazmerno složenijim naizmeničnim aktuelnih rezolverima (uređajima za rešavanje), jednostavno kodiranje šeme i inherentni digitalni optički izlaz (otvor, proizvod) optičkih enkodera rezultiraju (daju) jeftin, pouzdan (siguran) paket sa dobrim imunitetom (otporom) na buku. Postoje dve vrste onsovnih optičkih enkodera:

inkrementalni i apsolutni. Inkrementalna verzija optičkog enkodera meri brzinu rotacije i može zaključiti relativnu poziciju. Ukoliko trajna pozicija informacija nije uzeta u obzir, inkrementalni enkoderi se generalno lakše povezuju i daju ekvivalentnu (jednaku) rezoluciju mnogo jeftinije od apsolutnih optičkih enkodera.
Inkrementalni optički enkoderi
Najjednostavniji tip inkrementalnog enkodera je jednokanalni tzv. Tahometarni enkoder (enkoder koji meri obrtaje), koji je u osnovi instrumentovani mehanički svetlosni sekač koji proizvodi izvestan broj sinusa ili kvadratnih talasa koji vibriraju za svaki obrtaj vratila. Što je veći broj vibracija, to je veća rezolucija (a pri tome i troškovi) jedinice. Ovi relativno jeftini uređaji su pogodili kao i brzine povratnih informacija senzora od srednjih do visokobrzinskih kontolnih sistema. Međutim oni vode do problema buke i stabilnosti, pri čemu je brzina izuzetno spora (mala), zbog grešaka kvantizacije (Nickson, 1985). Pogodba, trampa (rešenje) ovde je rezolucija u odnosu na brzinu ažuriranja: poboljšana prolazna reakcija zahteva bržu stopu ažuriranja, koja za datu brojnu liniju smanjuje broj mogućih vibracija enkodera po (uzorku) intervalu testiranja. Tipično ograničenje za prečnik od 2 inča, diska inkrementalnog enkodera je 2540 linija (Henkel, 1987). Pored nestabilnosti (niske) male brzine jednokanalni tahometarni enkoderi su takođe nesposobni u određivanju pravca rotacije i samim tim se ne mogu koristiti kao pozicija senzora. Fazna kvadratura inkrementalnih enkodera prevazilazi ove probleme dodavanjem drugog kanala i zamenom detektora, tako da prizilazeći vibracioni tokovi su 90 stepeni van faze, kao što je prikazano na slici 2-6. Ova tehnika dozvoljava (daje mogućnost) dekodiranja elektronike da bi se odredio koji kanal vodi drugi kanal (je vodeći) a samim tim i utvrdi smer rotacije uz dodatnu korist (benificiju) povećane rezolucije. Hol (1990) pruža detaljnu diskusiju o izlaznim opcijama (jednosmerni TTL ili diferencijalni drajveri), i razna pitanja o dizajnu (tj. Rezoluciji, propusnom opsegu, fazama, filtriranju) za razmatranje kada se poveđu fazne kvadrature inkrementalnih enkodera sa digitalnim kontrolnim sistemom.
Slika 2-6.
Zapažen odnos faze između kanala A i B vibrirajućih tokova, mogu se koristiti za određivanje smera rotacije sa enkoderom fazne kvardature, dok jedinstveno (unikatno) izlazno stanje S [-S4 omogućava do četvorostrukog povećanja rezolucije. Otvor u spoljašnjem pravcu generiše jedan impuls indeksa (I) po rotaciji diska. Inkrementalna priroda fazne kvadrature izlaznih signala diktira da bilo koja rezolucija ugaonog položaja može samo biti (da postoji) u odnosu na neku određenu smernicu referencu, za razliku od apsolutne prirode. Uspostavljanje takve reference se može postici na više načina. Za aplikacije koje uključuju stalnu rotaciju od 360 stepeni, većina enkodera se uključuje (pridužuje) kao treći kanal, poseban proizvod (izlaz) indeksa koji se penje jednom za svaki potpuni obrtaj vratila (vidi sliku iznad 2-6). Položaj srednjeg vratila se tada navode po broju enkodera gornje ili donje tačke od ovog indeks položaja (ove indeks pozicije). Jedna mana ovog pristupa je da se svi relativni položaji informacija gube u slučaju prekida napajanja. U slučaju ograničene rotacije, kao što je kretanje suda (čaše) napred-nazad ili S ose, električno ograničenje se prekida i/ili mehanički zastoji se mogu koristiti za uspostavljanje početne referentne pozicije. Da bi se poboljšala ponovljivost, ova početna radnja se ponekada deli na dva

koraka. Osa se rotira po smanjenoj brzini u odgovarajućem pravcu, sve dok se susreće sa prekinutim mehanizmom, nakon čega je rotacija obrnuta za kratak definisan interval (za kratak period). Vratilo se potom polako rotira nazad na stop (poziciju) pri određenoj maloj brzini, od (ove) određene početne tačke, čime bi eliminisanje mogućih odstupanja inercijalnog opterećenja moglo uticati na konačni početni položaj. Ovaj dvokraki pristup se najčešće može posmatrati u napajanju pokretačkih pozicija nagaznih motora za glave matričkih štampača. Alternativno, funkcija apsolutne indeksacije može biti bazirana na nekim spoljnim referentnim radnjama koje su odvojene od neposredne servo-kontrolne programske petlje. Dobra ilustracija ove situacije zahteva inkrementalne enkodere koji se koriste da prate ugao upravljačke platforme. Npr. kada SAJBERMOŠN (kiber-pokretački) K2A Newmaster robot se prvo napaja, apsolutni upravljački ugao je nepoznat i treba da se instalira kroz referentnu radnju sa povezanim (veznim) farovima (svetlost), zidom ili nekim drugim skupom (nizom) poznate orijentacije (vidi poglavlja 15 i 16). Broj gornjih ili donjih tački (izlaza, proizvoda) elektronskih dekodera se tada koristi da izmeni (modifikuje) vodeći (glavni) registar na relativni način. Sve veći broj jeftinih komponenti van ponude imaju doprinos da prave/stvaraju/čine izbor fazne kvadrature inkrementalnog enkodera rotacionih senzora u istraživačkoj i razvojnoj zajednici.
Slika 2-7.
Predstavlja inkrementalni optički enkoder i PID motorni kontroler čipa koji je napravio Hevijet Pekard, zajedno sa Nacionalnim poluprovodnikom H-mosta/mostnim pojačalom koji zajedno čine osnovu potpuno digitalnog sistema za ukupnu cenu proizvoda ispod $100. Nekoliko proizvođača nudi mali broj DC prenosnih/zupčastih motora sa već ugrađenim inkrementalnim enkoderima u vratila armature. U SAD, u automobilskoj industriji automatskih vozila (AGV), rezolveri (uređaji za rešavanje) su međutim uvek traženiji u odnosu na optičke enkodere i njihovu uočljivu superiornostnad surovim radnim uslovima (u kojima se radi), dok Evropska AGV zajednica (udruženje), jasno favorizuje enkodere (Manolis, 1993).Slika 2-7. Ovde su prikazane glavne komponente za kompletni kontrolni digitalni sistem: (s leva na desno) Hjulet Pakardov HEDS-5500 inkrementalni optički enkoder, Hjulet Pakardov HCTL-jjoo kontolni čip, i nacionalni poluprovodnik LMD 18200H (mostno) prelazno napajanje pojačala (zahvaljujući mornarskoj komandnoj kontroli i okeanskom kontolnom centru).
Apsolutni opticki enkoderi
Apsolutni enkoderi se obi;no koriste za sporije rotacione aplikacije koje zahtevaju pozicione informacije kada potencionalni gubitak referenci od prekida napajanja ne sme biti tolerisan. Diskretan detektor elemenata u fotonaponskoj postavci (raspored, nizu) su poravnati ponaosob, na način raspada snopa i sa enkoderima koncentričnih pravaca kao što je prikazano na slici 2-8, stvarajući u suštini nekontaktnu implementaciju ranije putujućih četkastih enkodera. Ustupanje specijalizovanih puteva za svaku binarnu jedinicu rezultira rezoluciju na diskovima većeg formata (u odnosu na inkrementalni dizajn) sa odgovarajućim smanjenjem tolerancije na udar i vibracije. Opšte pravilo je da svaka dodatna namera (pult) enkodera udvostručuje rezoluciju, ali učetvorostručuje cenu (Agent, 1991).

Slika 2-8.
– Izvorna linija svetlosti koja prolazi kroz kodiran obrazac neprovidnih i providnih segmenata rotiraućih enkodera rezultira u paralelan izlaz koji jedinstveno određuje apsolutni ugaoni položaj vratila. (uzeto iz: Agent, 1991).Umesto tokova serijskih binarnih jedinica inkrementalnih dizajna, apsolutni optički enkoderi daju formulacije sa jedinstvenim obrascem kada za svaki kvantizovani (količinom uvećan) položaj vratila. Najčešće šeme za kodiranje su Grejev kod, prirodni binarni, i binarno-kodirana decimala (Avolio, 1993). Grejev kod (po pranalazaču Frenk Greju, iz Bel Lab-a, Belovih labaratorija) se odlikuje činjenicom da se samo jedna binarna jedinica menja s vremena na vreme, odlična prednost u eliminisanju asinhonih nejasnoća prouzokovanih tolerancijom (izdržljivošću) električnih i mehaničkih komponenti.
Binarni kod, sa druge strane, rutinski uključuje promene više binarnih jedinica kada se prebrojavanje smanjuje ili uvećava za jedan. Npr. Kada se ide iz položaja 255 do nulte pozicije, na slici 2-9B, osam binarnih jedinica prebacuje sa Is na Os. Pošto ne postoji garancija da svi pragovi detektora prate pravce detektorskih elemenata, svaka binarna jedinica će precizno prebaciti (uključiti) u isto vreme, s tim da znatna nejasnoća može da postoji tokom stanja tranzicije sa kodiranom šemom ovog oblika. Neki tip signalizacije rukovanja linijom validnih, dostupnih podataka bi bio potreban ukoliko bi više od jedne binarne jedinice bilo dozvoljeno da se promeni između uzastopnih položaja enkodera.
Apsolutni enkoderi su najpogodniji za spore i/ili retke rotacije kao što je upravljačko ugaono kodiranje, za razliku od merenja kontinuirano velike brzine (tj. Volana/upravljača) rotacija, koja bi bila potrebna za izračunavanje pomeranja duž pređenog puta. Iako ne sasvim robusni kao uređaji za rešavanje (rezolveri) za visoke (ili) temperature (a) visoko-udarne aplikacije, i rad na temperaturama preko 125 stepeni celzijusevih, a moguće je, i metala srednje rezolucije (1000 obrtaja) ili dizajniran Milerov disk mogu da se porede sa rezolverima u smislu otpora na udar (Manolis, 1993). Slika 2-9.Strana 9:
Slika 2-9.
Rotirajući apsolutni Grejev kodirani disk sa osam binarnih jedinica (A) u smeru suprotnom od porasta jedne pozicije će prouzrokovati samo promenu jedne binarne jedinice, gde će ista rotacija binarno kodiranog diska (B) prouzrokovati da se sve binarne jedinice promene u konkretnom slučaju (255 do 0) što je ilustrovano referentnom linijom na 12 časova. Složenija međusobna pitanja zbog velikog broja vodećih UDRUŽENJA sa paralelnom prirodom proizvoda predstavlja potencijalnu manu. 13-bitni apsolutni enkoder koji koristi besplatne izlazne signale za zvučnu izolaciju bi zahtevao kabl sa 28 provodnika (13 parova signala plus napajanje i prizemlje), naspram samo 6 za uređaj za rešavanje (rezolver) ili inkrementalni enkoder (Avolio, 1993).
DOPLER I INERCIONA NAVIGACIJA

Gore pomenuta rotaciona pomeranja senzora dele navigacione parametre direktno od rotacije točkova (volana), i time su podložni problemima koji proističu od klizanja omotača papučice i/ili nepravilne napumpanosti gume. U nekim aplikacijama, tehnike dopler i inercione navigacije se ponekad koriste da smanje efekat ovakvih izvora grešaka.
2.2.1 Dopler navigacija
Dopler navigacioni sistemi se redovno koriste u plovidbenim i vazduhoplovnim aplikacijama da doprinesu merenju brzine u odnosu na samu zemlju samim tim se eliminišu greške krajnjeg obračuna, nastale od strane nekog okeana ili vazdušnim strujama. Ovaj princip rada se zasniva na doplerovoj promeni frekvencije posmatranoj kada emitovana energija odražava isključivanje površine koje se kreće zajedno sa emiterom, ili o čemu će se detaljno govoriti u poglavlju 8.
Pomorski sistemi uključuju akustičnu energiju koja se reflektuje sa dna okeana, dok se u vazdušnim sistemima oseća odbijanje mikrotalasne RF energije o površinu zemlje. Obe kenfiguracije obično podrazumevaju niz od četiri trasduktora odvojenih sa 90 stepeni u azimutu i nagnuti na dole pod zajedničkim uglom u odnosu na horizontalnu ravan (Danlep i Šufeld, 1972). Zbog ograničenja u ceni smanjene verovatnoće u poprečnom stujanju, većina robotske implementacije uključuje jedan unapređeni pretvarač za merenje brzine na tlu u smeru putovanja. Slične konfiguracije se ponekada koriste u poljoprivrednoj industriji, gde proklizavanje guma na nekoj, sveže preoranoj prljavštini može se ozbiljno ometati potrebom da se oslobodi seme ili đubrivo sa srazmernom stopom vozila unapred. M113 zemljani robot (Harmon,1986) uključuje RF sisteme van rafa (police) ovog tipa proizvedenog od strane Džon Dira da kompenzuje klizanje po putu (slika 2-10). Milner (1990) izveštava/daje vrlo jeftin ultrazvučni uređaj dizajniran da ga nose trkači i skijaši (reklamiran od strane Nike-a inc. Kao i Nike monitor) koji bi moli da mere milju u roku od 10 stopa.
Slika 2-10.
Komercijalno dostupan Džon Dirov poljoprivredno osnovni senzor brzine je bio uključen u zemljanog robota da poboljša DEADRECONING tačnost (zahvaljujući mornarskoj komandnoj kontroli i okeanskom nadzornom centru). Mikrotalasni (ili ultrazvučni) senzor je usmeren na dole na propisanom uglu (obično 45 stepeni) da oseti kretanje tla kao što je prikazano na slici 2-11. Stvarna brzina tla VA je izvedena iz izmerne bzine VD u skladu sa sledećom jednačinom (Šulc, 1993): VA=stvarna osnova brzine duž putanje; VD=izmerena Doplerova brzina a=ugao deklinacije, c=brzina svetlosti, FD=primetna Doplerova promena frekvencije; Fo=emitovana frekvencija.
Slika
2-11. Doplerova osnovna brzina senzora nagnuta pod uglom kao što je već prikazano meri brzinu komponenti VD realne osnovne bzine VA (uzeto od Šulca, 1993). Greške u određivanju realne osnovne brzine nastaju usled mešanja bočnih školjki (režnjeva), vertikalne komponente brzine

vozila na površini puta kao i neizvesnosti u stvarnom upadnom uglu zbog konačne širine snopa. Pošto je Doplerova frekvencija proporcionalna kosinusu ugla, udaljeni deo snopa daje veću frekvenciju nego kod bližeg dela sa neprekidnom raspodelom frekvencija između (Milner, 1990). Procesno signalne tehnike (tj. Kvadratni koren od frekvencionih filtera, centroid cediljke, i zaključane programske petlje) su neophodne da izdvoje reprezentativnu frekvenciju od spektra. Birn (1992) ukazuje na jos jedan interesantan scenario za potencijalno pogrešnu operaciju uključujući nepomično vozilo parkirano preko potoka. Doplerovi zemljani senzori brzine bi u ovom slučaju pogrešno protumačili relativno kretanje između zaustavljenog vozila i tekuće vode kao zapravo vozila.
2.2.2 INERCIONA NAVIGACIJA
Alternativni pristup povećavajući rešenje krajnjeg obračunavanja izvan jednostavne odometrije je inerciona navigacija, prvobitno razvijena za primenu u vazduhoplovstvu. Tehnologija je ubrzo bila prilagođena za upotrebu na projektilima i u spoljašnjem postoru, da pronađe svoj put do upotrebe kada su nuklearne podmornice Nautilus i Skejt bile adekvatno opremljene za podršku svojih transpolarnih putovanja 1958 god. (Danlep i Šufeld, 1972). Princip rada uključuje kontinuiranu detekciju minutnih ubrzanja u svakoj od tri smera ose, i prekovremeno integrisanje da bi se izvukli brzina i položaj. Platforma žiroskopalnih stabilizovanih senzora se koristi za održavanje nivoa orijentacije od tri ubrzanja tokom ovog pocesa.
Iako je prilično jednostavan u svom konceptu detalji implementacije su prilično zahtevni sa stanovišta smanjenja izvora raznih grešaka koji negativno utiču nastabilnost žiroskopa koji se koriste da obezbede konkretniji odnos. Posledica visoke proizvodnje i troškova održavanja su efikasno sprečili bilo kakvu praktičku primenu ove tehnologije u automatizovanoj voznoj industriji (Turpin, 1986). Npr., „kvalitetan“ inercioni navigacioni sistem (INS) kao što bi se mogao naći u komercionalnoj avio kompaniji, imaće tipično odstupanje od oko jedne nautičke milje po satu rada i troškove između $50K i $70K (Birn, 1992). Krajnje visoki INS paketi koji se koriste u podzemnim aplikacijama prikazali su preformanse bolje od 0,1 odsto pređene dužine ali troškove u naselju $100K do $200K dok su verzije donjih performansi (tj. 1 odsto pređenog puta) pokrenuti između $20K do $50K (Dalin i Kranc, 1988). Eksperimentalni rezultati univerziteta u Monpeljeu, u Francuskoj (Vaganai, 1993, Baršan i Durant-Vajt, 1993, Mononen, 1994) i univerzitet u Mičigenu (Borenštajn, 1994a) ukazuje na pristup inercione navigacije da realno nije u prednosti zbog gore navedenih razloga. Kao posledica toga upotreba INS hardvera u robotskim aplikacijama je do sada bila generalno ograničena u scenarijima koji se ne mogu adresirati od više praktičnih alternativa. Primer takve situacije je predstavio Samarko (1990; 1994), gde se prenose preliminarni rezultati u slučaju da se INS koristi za kontrolu autonomnih vozila u rudarstvu. Razvoj jeftinih optičkih žiroa i čvrsto formulisanih akcelometara, međutim obećava da će otvoriti nove mogućnosti u ne tako dalekoj budućnosti. Razne žiro i akcelometarske komponente koje čine inercioni navigacioni sistem će biti kasnije detaljno objašnjen u poglavlju 13.

2.3. Tipična mobilnost konfiguracija
Znatan broj dizajnerskih problema utiče na izbor odgovarajućih pogona i usmerivanja konfiguracije za mobilna robotička vozila: *Manevisanje – sposobnost za prevođenje i/ili promenu smera pokreta moraju biti u skladu sa ograničenjima okoline koja ih okružuje. *Mogućnost kontrole – Hardver i softver koji su potrebni za kontrolu mobilnosti moraju biti praktični i ne previše složeni. *Trakcija (vuča) trebalo bi da se obezbedi dovoljna trakcija da smanji proklizavanje pod različitim uslovima u skladu sa operativnim scenarijom. *Sposobnost penjanja – unutrašnje (zatvorene) šeme treba da omoguće prolaz sa manjom isprekidanošćuili praznini na podnoj površini; dok spoljašnji (eksterijer) zahtevi su diktirani nizom terenskih karakteristika povezanih sa aplikacijom. *Stabilnost – mobilnost baze mora da obezbedi dovoljnu stabilnost za nosivost sa adekvatnom sigornosnom rezervom pod očekivanim uslovima ubrzanja, nagiba i ljuljanja (okretaja, kotrljanja). *Efikasnost – potrošnja električne energije treba biti u skladu sa dostupnim rezervama energije i (dužnosnim, carinskim) ciklusima. *Održavanje – Sistem teba da bude lak za održavanje sa prihvatljivim vremenom između kvarova, i da nije sklono skupim gumama ili nosećim komponentama. *Uticaj na životnu sredinu – pogon i upravljačka funkcija ne treba da oštećuju pod ili zemljinu površinu. *Navigaciono razmatranje – tačnost smanjenog obračna (dead reckoning) treba da bude u skladu sa potrebama aplikacija.Ovaj sledeći deo će razmatrati samo one senzore koji podržavaju poslednje navedene kategorije.
2.3.1 Diferencijalno upravljanje
Zatvoreni pogonski sistem veoma često koristi dve pojedinačno kontrolisane felne sa obe strane baze, sa točkićima i napred i nazad, zbog stabilnosti. Ova konfiguracija omogućava robotu da se okreće u mestu oko vertikalne ose za manevrisanje u zakačenim delovima. Brzine upravljačkog motora se prate opričkim enkoderom pričvršćenim za armaturu vratila (slika 2-12). Visoka rezolucija enkodera fazne kvadrature proizvode stotine tački po jednom okretu motornih armatura, koje se obično provode u hiljadu tački po obrtaju točka. Veoma precizno raseljenje (pomeranje) i brzina informacije je stoga dostupna (moguća) za upotrebu u Dead reckoning kalkulacijama, ali na rezultate utiče broj sistematskih kao i grešaka iz spoljašnjih izvora, koji se moraju uzeti u obzir. Pomeranje (kretanje) robota D duž putanje je dato jednačinom, gde je:
D – raseljavanje (kretanje, pomeranje) platformeDi – raseljavanje (pomeranje levog točka)Dr – pomeranje desngo točkaSlično tome, brzina platforme V je data jednačinom, gde je: V=brzina platforme

Vi=brzina levog točkaVr=Brzina desnog točka
Slika 2-12.
Rani stil inkrementalnih optičkih enkodera pričvršćen za levu i desnu pogonsku armaturu obezbeđuju diferencijalni (razlicčit) odometarske informacije za kontrolni disk ROBART II kao na slici 2-13., (luk) Di pretstavlja deo obima kružnog poluprečnika d+b:Ci=2n(d+b) gde je: Ci= Obim kruga meren na levom točkud= rastojanje između levog i desnog pogonskog točkab= unutrašnji radijus okretPored toga; (i odnos):
Slika 2-13.
Levi i desni točak prave lukove D| i Dr za promenu tarifnog broja šest robota. Kombinujući navedene jednačine i rešenje za 0:d+bSlično tome, kraći luk Dr pretsavlja deo obima kruga, poluprečnika b:žCr=2nb, gde je:Cr=obim kruga meren na desnom točkuI odnos: Napomenimo da je ovaj izraz za promenu orijentacije vozila funkcija pomeranja (rastojanja) levog i desnog točka i potpuno je nezavisna od pređenog puta. Promenljiva D u imeniocu međutim predstavlja značajan izvor greške zbog neizvesnosti (neodređenosti) vezanih za efektivnu tačku kontakta gume, kao što je prikazano na slici 2-14. Pretpostavka da je udaljenost između točkova jednostavno udaljenost centra u centar (centralna udaljenost) je neprikladna (nemoguća). Neplanirane nepravilnosti u podnoj površini se mogu kombinovati sa varijacijama i u habanju gazećeg sloja i povinovanju da se efektivna kontaktna tačka premesti (postane) nepredvidiva što ima veoma štetan uticaj na vozilo.
Slika 2-14.
Neizvesnosti u efektivnoj kontakton tački između gume i poda predstavlja dvosmislenost 2w udaljenosti točkova d. Pozivajući se na sliku 2-15., pomeranje točka D/ je dato jednačinom gde je: <[>= osovinska rotacija – poluprečnikRei= efikasan poluprečnik levog točka(Govoreći) u smislu enkoder tačaka, iz ovoga proizilazi: Ni=broj tačaka u levom enkoderuCt=tačke enkodera po obrtaju točka Slika 2-15. Po usklađenosti (pravilnosti) gume, važeći radijus točka Re je manji od nominalnog prečnika točka Rn.Slično tome, oznake za desni upravljački točak su:Nr=Broj jedinica (tačaka) enkodera desne osovineCi=Broj tačaka (jedinica) enkodera po obrtaju točka

Rer=Poluprečnik važećeg desnog točkaUpravljački kontrolor će pokušati da napravi da robot ide pravom linijom, tako što će poistovetiti Nr i Ni. Ipak, bitno je da napomenemo da vađeći radijus (poluprečnik) točka je funkcija usklađenosti gume i težine robota, mora biti empirijski utvrđen. U stvarnosti Ret može da bude različit od Rer-a, kao što je bio slučaj na ROBART – u II u pokušaju da se dobije podudaran skup (datoteka). Za neke gume je utvrđeno da usklađenost varira kao i funkcija rotacije točka <|) a samim tim i važeći radijus. Zanemarujući prethodno navedeno, u cilju jednostavnosti pretpostavićemo sledeće, da usaglašenosti točka poluprečnika R prelaskom na korak diskontinuiteta visine h, kao što je prikazano na slici dole 2-16. Prelaskom na diskonuitet (a), točak se efikasno okreće (rotira) oko tačke „C“ u dijagramu, dok je osovina direktno projektovana na grafoskop C, na tačku 0’ (Borenštajn, 1994). U Međuvremenu, enkoder točka meri efektivnu rotaciju $ (dolara) koja odgovara kretanju osovine, duž puta 0-0’ za predviđenu udaljenost Dm. Međutim kao što Borenštajn ističe, stvarni (realni) horizontalni pređeni put (udaljenost) je samo Dh, pri tom stvarajući linearnu grešku veličine Dm-Df. U slučaju „udarnog“ (ležećeg policajca) slična greška će se javiti u kotrljanju (kretanju) druge strane u tački C, kao što točak daje identičnu udaljenost h u povratku na nivo poda. Ovo pomeranje diferencijala između levih i desnih pogonskih točkova rezultira u trenutnoj promeni „zaglavlja“ (vođenja) (ka strani koja prelazi preko izbočine), jednako je:
Gde je:
Dm= merena udaljenost (pređen put)Dh=stvarna horizontalna udaljenost (pređen put)D=rastojanje odvajanja točka, kao i ranijeSličan efekat se primećuje kada poprečna pukotina na podnoj površini zajedno sa vertikalnim podom h’ se određuje odnosom tačke prečnika sa širinom pukotine W.
Slika 2-16.
Poprečnost prepreke ležećeg policajca stvara razliku u horizontalnoj udaljenosti pređenog puta u odnosu na prividno izmerenu udaljenost enkoderom, što dovodi do značajnog ugaonog poravnavanja. (Borenštajn, 1994 a R IEEE- uzeto sa promenama). Sličan efekat se dobija kada se kotrlja preko širine W. Prepreke i pukotine na tlu mogu prouzrokovati ne-sistemske greške koje negativno utiču na izvođenje (rezultiranje) krajnjeg obracuna. Drugi česti izvor grešaka je neizbežno proklizavanje koje se javlja između gume i površine tla usled masnoće ili ulja, izlivanja tečnosti, preteranog ubrzanja ili usporenja, ili čak samog vozila. Ovaj problem je naročito vidljiv u spoljašnjoj primeni diferencijalnog pogona, poznatog kao „klizni“ (proklizni) upravljač, rutinski implementian u obliku numera na buldožerima i oklopnim vozilima. Takve klizno-upravljačke (mini) konfiguracije se namerno oslanjaju na proklizavanje točka za normalan rad (slika 2-17), kao i posledice koje radije pružaju informacije krajnjeg obračuna. Iz ovog razloga, klizni (proklizni) upravljač (volan) se uglavnom koristi samo u teleoperacijama, koje su nasuprot autonomnim robotskim aplikacijama, gde je sposobnost za savladavanje bitnih prepreka na tlu,

poželjnije od trenutnih informacija krajnjeg obracuna. Ovaj primer se vidi na voznoj stazi (putu) sa robotima na daljinski upravljač, namenjenim za raspolaganje eksplozivnih sredstava.
Slika 2-17.
Efikasna tačka kontakta za klizeci upravljač (točak ili mini upravljač) sa druge strane je ograničena na ograničenu pravougaonu zonu koja sa nejasnoćom odgovara disku točka (vozila). Kao što se podrazumeva po koncentričnim krugovima, znatno proklizavanje mora da se desi, da bi se vozilo okrenulo.
2.3.2. AKERMANOV UPRAVLJAČ (točak)
Korišćen je isključivo u automobilskoj industriji Akermanov volan (Džons i Flin, 1993) je dizajniran da obezbedida se unutrašnjost srednjeg točka rotira pod malo oštrijim uglom nego spoljašnjost točka pri skretanju a samim tim i eliminiše geometrijski indukovano proklizavanje guma. Kao što je viđeno na slici 2-18, proširene ose za dva prednja točka se seku u zajedničkoj tački koja se nalazi na zadnjoj osovini proširene ose. Na mestu preseka tački praćenih po zemlji, po sredini svake gume je skup koncentričnih lukova u centralnoj tački rotacije P/, i (ignorišući bilo koja centralna ubrzanja, svi vektori trenutne brzine će naknadno biti tangencijalna (dodirna) ovim lukovima. Takva upravljačka (točkasta, okrugla) geometrija je napravljena (urađena) da zadovolji Akermanovu jednačinu (Birn, et al, 1992):
Gde je:
Oi=relativni upravljački ugao unutrašnjeg točka80=relativni upravljački ugao spoljnjeg točka/=uzdužno razdvajanje točka d=lateralno (bočno) odvajanje točka
Slika 2-18.
U Akermanovom upravljačkom vozilu proširene ose svih točkova se seku u jednoj tački (Birn, et al, 1992).Radi pojednostavljenja ugao upravljača vozila OSA se može posmatrati kao ugao (u odnosu na zaglavlje vozila glavnog vozila) povezanog sa imaginarnim centrom točka (volana) kao što je prikazano na slici gore. OSA se može izraziti u smislu bilo unutar bilo spolja servo uglova (6i ili 0O) na sledeći način (Birn, et al, 1992): COT 0M= ----|- cot 9, ili alternativno: cot 6sa =cot=0O.Akermanov upravljač daje prilično precizno rešenje krajnjeg obračuna, dok sporedna trakcija i raščišćavanje tla uključuju sav terenski rad, što je generalno metoda izbora za spoljašnja autonomna vozila. Povezane implementacije vožnje obično koriste benzinski ili dizel motor, zajedno sa manuelnim ili automatskim menjačem, sa snagom primenjenom na sva 4 točka putem prenosa, diferencijala nizom univerzalnih veza (spojeva). Takav primer se vidi u HMMWV (bazi) prototipu USMC prgrama teleoperaterskog vozila (TOV, Aviles, et al, 1990). Sa vojnog stanovišta, upotreba postojećih zaliha opreme ovog tipa pojednostavljuje neke od logističkih problema, vezanih za održavanje vozila. Pored toga, pouzdanost komponenti vožnje je visoka

zbog nasleđene (već ugrađene) stabilnosti dokazane napajanjem vozila. (Mogu da se jave značajni problemi povezivanja (konekcije), međutim u retro opremi (instalacijama) vozila „van police“ (van podaje) namenjen za vozače da prilagode daljinsku ili kompjutersku kontrolu).
Slika 2-19.
Konfiguracija uključena u pogon sa šest točkova na surogat tele-operaterskom vozilu ima prekomerno klizanje točkova tokom skretanja, i ne seku se sve proširene ose u jednu tačku. Tehnologija robotskih sistema (NETS, et al, 1992; Majers 1992) razvila je surogan tele-operatesko vozilo (STV) i smatra se labavo 6-točkovno Akermanovo upravljačko vozilo sa dve zadnje osovine, ali geomettrija ne zadovoljava Akermanovu jednačinu (slika 2-19). Dodatna zadnja osovina uvodi neko značajno proklizavanje točka (i gume) za vreme okreta pa je činjenica da nijedna akcija (radnja)diferencijala nije egistrovana u lanac pogona dizajna što dodatno pogoršava stvari. Ove štetne posledice za tačnost DEAD RECKONING (krajnjeg proračuna) nisu bile sve toliko značajne sa operativne tačke gledišta, jer je vozilo kontrolisao udaljen čovek (vozač), ali su bili glavni faktor da se ne koriste STV u MDARS spoljašnjoj upotrebi (ulozi).
2.3.3. SINHRO DISK
Inovativna kofiguracija, poznata još kao sinhroni disk ima tri ili više felni (točkova) upravljača (slika 2-20), mehanički spojeni na takav način da se svi rotiraju u istom smeru, istom brzinom, i slično jednoglasnom obrtanju o njihovim odgovarajućim servo osama pri okretanju. Ovaj ueđaj i servo (upravljačka) „sinhronizacija“ rezultira u poboljšanju krajnjeg obračuna kroz smanjeno klizanje jer svi točkovi stvaraju jednake i paralelne sile vektora, u svakom trenutku.
Slika 2-20.
Donji (A) i gornji (B) pogledi na konfiguraciju sa četiri točka i sinhroni pogon ( preuzeto od Holand-a, 1983). Potrebna mehanička sinhronizacija se može postići u jednom broju puteva najčešće kao lanac, pojas ili brzinom vožnje. Karnidž Melom Univerzitet implementirao je elektronski sinhonizovanu verziju na jednom od njihovih Rover serije robota. (Slika 2-21), Sa posvećenim pogonskim motorima za svaki od tri točka.Pojasne i lančane konfiguracije će osetiti degradaciju i tačnosti upravljanja preko neravne raspodele šljake, koja varira u zavisnosti od opterećenja i smera rotacije. Pored toga kad god su lanci (ili tajming pojasevi) zategnuti (pooštreni) da smanji tu labavost (šljaku) i pojedini točkovi moraju biti poravnati. Ovi problemi su eliminisani (rešeni) sa potpuno zatvorenim prenosnikom pogona. Zatvoren (ograđen) prenosni mehanizam takođe značajno smanjuje buku, kao i grupisane čestice, ove poslednje su važne aplikacije u praznom prostoru.Primer implementacije pojasa (pojasnog pogona) sa tri upravljača se ogleda u Deningovom MRV-2 i Sentri robotima napravljenih (predstavljenih) Deningovim mobilnim robotima, Voburn, MA (Kadanof, 1986). Pozivajući se na sliku 2-22, obrtni momenat diska je prenesen dole kroz tri upravljačke kolone do guma ispunjenih poliuretanom. Vratilo izlazno pogonskog motora je mehanički povezano na svaku od snaga vratila upravljačke kolone, pojasom namenjenom za teške uslove rada, da obezbedi sinhroni rad. Drugi podešen pojas prenosi rotacioni učinak (proizvod), upravljačkog motora na tri upravljačka stuba, omogućavajući im sinhrono obrtanje punog opsega od 360 stpeni (Evert, 1988).

Slika 2-21.
Pluton CMU robotuključuje tri elektronski sinhronizovana pogonska točka (upravljača) (Karnidž Melon Univerzitet). Konfiguracija sa tri točka osigurava dobru stabilnost i trakciju, dok je aktivno vođeni veliki prečnik felne točkova puža više nego adekvatnu sposobnost prelaska preko prepreka za unutrašnja scenarija. Nedostaci ove posebne implementacije uključuju greške krajnjeg obračuna predstavljene u skladu sa pogonskim pojasevima (trakama) kao i od reakcionarnih trenja po podnoj površini, kada (dok se) okreće u mestu. Da bi se prevazišli ovi problemi, veliko Kibermoušn KZA Newmaster robot uključuje konfiguraciju zatvorenog pogona prenosnika sa poravnatim (ispravljenim) točkovima od upravljačke osovine, kao što je prikazano na slici 2-23. Kada se dno obrće tokom skretanja, pričvršćeni (pridodat) točak se rotira u odgovarajućem pravcu da smanji trošenje poda i guma, snagu potrošnje i proklizavanja. Bitno je da znamo da za pravilnu naknadu, spojni zupčanik na osovini mora biti na suprotnoj strani napajanja pogonskog zupčanika prenosnika vratila od točka kao što je i ilustrovano. Glavna jednačina za minimalno proklizavanje je (Holand, 1983):A=broj zubaca na pogonskom zupčanikuB=Broj zubaca na zupčaniku osovine točkar’=Ispravljenost (poravnatost) točka od obrtanja ose upravljača (volana)r=radius točka
Slika 2-22.
Deningova MRV-2 pokretljivost platforme sadrži konfiguraciju sinhronog pogona sa tri težišta sa točkovima koji se nalaze direktno ispod glavne tačke (stožer) osovine vezanih nizova upravljača (tehnološki Džordžia univerzitet).-Jedan nedostatak ovog pristupa se ogleda u smanjenoj bočnoj stabilnosti koja nastaje kada je jedan točak okrenut (predan) ispod vozila. Unapređeni dizajn Kibermoušna K3A rešava ovaj problem (sa manjim međuosovinskim rastojanjem) tako što umesto jednostrukog, uvodi dupli točak, kao što je prikazano na slici 2-24 (Fišer et al, 1994). Dva točka se okreću u suprotnim smerovima pomoću diferencijala kao što se i osnova okreće prilikom zaoketa ali dobra stabilnost se održava u gore već navedenom primeru, uz pomoć spoljašnjeg zanošenja (naginjanja, ili klatna) dodatnog točka. Pored toga, smanjena bočna projekcija sklapanja platforma (osnove, podnožja) znatno smanjuje verovatnoću penjanja (uzdizanja) točka na bočnu površinu projektovanja kao što su stub (kolona, niz) ili ugao; situacija koja je ovim prouzrokovala prevrtanje Newmastera. Kalkulisanje krajnjeg obračuna za sinhroni disk su gotovo trivijalna: Pravac vozila je jednostavno izved iz upravljačkog ugla enkodera, dok je rastojanje u pravcu kretanja dato na sledeći način: Snaga (napon) vratila – izvor napona -Zupčanici sa nagibom od 90 stepeni
Slika 2-23.
Kompenzacija brzina tokom skretanja je postignuta upotrebom seta (ispravljanja) platforme na Newmaster robotu na tri točka (uzeto od Holanda, 1983). Gde je:

D=rastojanje vozila duž putaN=merna jedinica enkodera pogonskog motora vratilaCe=jedinica enkodera na kompletnom obrtaju točkaRe=efikasan radijus točka
*Slika 2-24. Novi model dvotočkovne osovine donji desni je predstavljen u odnosu na originalni KZA model u gornjem desnom uglu (Kibermoušn, INC).
2.3.4. TROCIKLIČNI POGON Konfiguracija trocikličnog pogona (slike 2-25) uključuje jednog pogonjenog prednjeg točka i dva pasivna zadnja točka (ili obnuto) su prilično česte u AGV aplikacijama zbog njihove jednostavnosti. Za odometarsku instrumentaciju upravljačkog ugla enkodera rešenje krajnjeg obračuna je jednako Akermanovom upravljačkom vozilu, gde pogonski točak zamenjuje imaginarni centar točka, razmatrano u 2.3.8 poglavlju. Alternativno, ukoliko se zadnja osovina diferencijalne odometrije koristi za određivanje pravca, rešenje je identično konfiguraciji diferencijala pogona, razmatranog u odeljku 2.3.1. Upravljački pogonjen točakPasivni točkovi
Slika 2-25
Trociklično pogonske konfiguracije uključuju upravljački pogonjen (vođen) točak i dva pasivna prateća točka koji mogu direktno da dele vodeće (glavne) informacije od upravljačkih uglova enkodera ili indirektno od diferencijalene odometrije.Jedan od problema u vezi sa trocikličnom pogonskom konfiguracijom je centar gravitacije vozila koji teži da se udalji od pogonjenog točka kada prolazi nagib, što dovodi do gubitka trenja. Kao i u slučaju Akermanovih upravljačkih dizajna, neka šteta površine izazvanih grešaka u pravcu je moguća kada pobuđivanje upravljanja, dok se platforma ne pomera.
2.3.5. VERTIKALNI POGON
Rešenje krajnjeg obračuna za većinu konfiguracija višestepene slobode (kretanja pri vožnji) se vrši na sličan način kao za diferencijalni pogon, sa podacima o poziciji i brzini izvedenom iz motora (ili točka) vratila enkodera. Za trotočkaša, primer ilustrovan na slici 2-26B, jednačine kretanja koje povezuju pojedinačne brzine motora sa brzinom komponenti Vx i Vv u referentnom okviru vozila je dato (Holand, 1983):V/=tangencijalna (dodirna) brzina točka broj 1V2=tangencijalna (dodirna) brzina točka broj 2Vi=tangencijalna (dodirna) brzina točka broj 3CO;=rotaciona brzina motora broj 1<>>2=rotaciona brzina motora broj 2COj=rotaciona brzina motora broj 3(Up=stopa bazne rotacije oko ose obrtanja)r=efikasan radijus točkaR=efektivno poravnjenje točka kod ose glavne tačke

Slika 2-26.
Šema skupa točkova koju koristi uprava veterana (la, et al; 1981, e IEEE) na invalidskim kolicima koja se kreću u svim pravcima. (B) Pregled baze prikazuje odnos orijentacije komponenti u konfiguraciji trotočkaša (uzeto od Holanda, 1983). Geometrijski odnosi između rotacije točka i pomeranja vozila su specifične platforme, kao što bi trebalo da bude očigledno iz alternativnog dizajna četvorotočkaša, pikazanog na slici dole 2-27.Višestruki stepen slobode konfiguracija prikazuje izuzetnu upravljivost u skučenom prostoru u odnosu na konvencionalne 2-DOF mobilne sisteme, ali je otkriveno da ga je teško kontrolisati zbog prirode preterane ograničenosti. (Reister, 1991;Kilon i Pin, 1992; Boenštajn, 1994 b). Nastali problemi uključuju povećano proklizavanje točkova, prekomerno habanje guma, i neefikasnost u operaciji što ponekada može biti kompenzovano ne uvek potrebnim, povećanjem u upravljivosti (pokretljivosti). Pažljivi pregleda svih razmena koje su uključene (transfera) treba da se izvrši, pri radu bilo koje pogonske konfiguracije. Slika 2-27.
Primer MDOF pogonske (drajverske) konfiguracije razvijenog za odsek za inskekcijski program energetskog nuklearnog otpada (Martin Marijera, Denver).
2.4. INTERNA POZICIJA ISPRAVLJANJA GREŠKE
Delom motivisana degradiranim navigacijskim mogućnostima MDOF vozila, istraživači univerziteta u Mičigenu su smislili pametan način značajnog smanjenja grešaka krajnjeg obračuna od jednog do dva reda veličine bez ikakve spoljašnje reference (Borenštajn, 1994 a).Šema korekcije unutrašnje greške položaja je prikazana na modelu CLAPPER. (Autonomno opustljiv lančani spoj autonomne platfome sa položajem popravke gešaka), 4-DOF robotsko osnovno ispitivanje se sastoji od 2TRC LebMeit vozila spojenih kompatibilnim lančanim spojem (slika 2-28). Kompatibilna veza prikazuje trenutne greške kontorola bez ikakvih međusobnih transfera (prebacivanja) naponskih reakcija između LabMate-a, i time eliminiše proklizavanje točkova koji su prijavljeni za laternativne MDOF dizajne (Reister, 1991; Kilon i Pin, 1992). Što je još važnije veza je instrumentalizovana kao što je ilustrovano na slici 2-29, da obezbedi povratu informaciju u realnom vremenu, o relativnoj poziciji i orijentaciji dve TRC platforme. Apsolutni enkoder na svakom kraju meri rotaciju svakog LabMate-a (u odnosu na povezivanje), sa rezolucijom od 0,3 stepena dok se linearni enkoder koristi da meri rastojanje odvajanja u opsegu od ±5 milimetara.Jedan nadzorni (glavni) računar čita impulse enkodera iz sva četiri pogonska točka i izračunava poziciju krajnjeg obračuna za svaka LabMate zaglavlja na konvencionalan način. Ispitivanjem ovih vidljivih rešenja u spajanju sa poznatim relativnim orijentacijama dve platforme, CLAPPER sistem može da defektuje i znatno smanji broj grešaka za obe baze mobilnosti.
Slika 2-28.
CLAPPER je dualni diferencijalni pogon višestepene slobode (kretanja) vozila koji se sastoji od dva TRC LabMate-a spojenih sa kompatibilnom vezom (lančanom vezom) (Univerzitet u Mičigenu).

Princip rada je centriran na konceptu rasta stope greške, koji je predstavio Borenštajn (1994a), i koji razlikuje „brzorastuće“ i „spororastuće“ greške krajnjeg obračuna. Npr. Kada diferencijalno usmeravan robot prelazi diskontinuitet platforme što je razmatrano u poglavlju 2.3.1., odmah će slediti osetna greška u orijentaciji (tj. Brzorastuća greška).Slično tome greška bočnog pomeranja je međutim u početku vrlo mala (tj. Spororastuća greška), ali raste neograničeno kao posledica greške u orijentaciji unutrašnjih popravki grešaka. Algoritam vrši u odnosu merenja pozicije sa dovoljnom stopom ažuriranja (nadograđivanja) da omogući svakom LabMate-u da detektuje brzorastuće greške u orijentaciji, pri tom se oslanjajući na činjenicu da se greške bočnog pomeranja javljaju sa obe platforme dok je testirani (primerak) intervala bio veoma mali. Kompatibilno povezivanje u suštini formira pseudo-stabilan pravac koji referira na svetske koordinate, a sama orijentacija je diktirana relativnim prevodom njegovih trajnih tački koje su zauzvrat (prilikom skretanja) pogođena samo bočnim pomeranjima dveju osnova LabMate-a. Pošto su bočna pomeranja spororastuće greške spona se rotira u veoma malom iznosu između uzoraka enkodera.Brzorastući azimutni poremećaj baze, sa druge strane, nisu upareni zglobovi do povezivanja, omogućavajući enkoderima da detektuju, kvantifikuju trenutne orijentacione greške na rotacionim bazama (platformama), čak i kada su oba u pokretu. Borenštajn (1994a) daje potpuni opis ovog inovativnog koncepta i izveštava eksperimentalne rezultate ukazujući na poboljšane performanse krajnjeg obračuna, čak do faktora do 100. Točkić
Slika 2-29.
Kompatibilna veza je instrumentalizovana sa dva apsolutno rotaciona enkodera i linearnog enkodera da izmeri relativne orijentacije i rastojanje između LabMate baza (platformi), (uzeto od Borenštajna, 1994a, ® IEEE).
3. Dodirno i daljinsko očitavanje Dodirni senzori se uglavnom koriste na automatski vođenim vozilima (AVG) i pokretnim robotima kao krajnja linija indikacije sudara sa okružujućim preprekama. Kao što samo ime govori, proces detekcije podrazumeva direktan fizički kontakt između senzora i predmetnog objekta. Daljinski senzori, sa druge strane, su nekontakni uređaji koji obezbeđuju rano upozorenje na prisustvo objekta na bližoj udaljenosti od senzornog elementa. 3.1. Dodirni senzori
Mnoštvo različitih tehnologija se upotrebljava u različitim šemama kontaktnog detektovanja (Harmon, 1983; Hall, 1984; Dario & DeRossi, 1985; Fielding, 1986; McAlpine, 1986; Pennywitt, 1986):•Kontaktno obuhvatnje.•Fotoelektrične•Magnetske•Magneto-otporne.•Piezoelektrične

•Piezootporne.•Kapacitivne•Ultrazvučne.
Nadalje, postoji mnogo načina na koje gorenavedene strategije detektovanja mogu biti fizički konfigurisane. Iz perspektive mobilne robotike, međutim,praktična rešenja mogu se uglavnom svrstati u tri glavne grupe: 1) dodirne senzore, ili antene, 2) dodirne odbojnike, i 3) polja prenosnih površina
3.1.1. Dodirni senzori
Moje prvo iskustvo sa dodirnim senzorima je vezano za CRAWLER I robota predstavljenog u 1. poglavlju. Dodirno dektovanje je bilo jedino praktično sredstvo u to vreme (1966) za dobijanje bilo kakve vrste povratne informacije za izbegavanja sudara, zbog ograničenja kako u tehnologiji, tako i zbog ograničenja mog budžeta za projekat „Sedamdeset senzora za mobilne robote“.
Prva implementacija se sastojala od kratkih gitarskih žica provučenih kroz središte matice šrafa. Otklon žice koji je odgovarao fizičkom kontaktu žice sa okolinom prouzrokovao je kontakt žice sa maticom zatvarajući tako električno kolo. Slične implementacije prijavili su Russell (1984), Schiebel (1986) i Brooks (1989). Poboljšana verzija CRAWLER senzora (Slika 3-1) uključuje petlju žica natrag kroz središte druge matice kojom se formira strujno kolo, čime se proširuje zaštićeno područje. Ovaj drugi dizajn je povezan na čitač-bušač kartica (vidi Poglavlje 1) kao podrška programabilnom manevru za oporavak od sudara. Mali najlonski odbojnici (nije prikazano na slici) su postavljeni da bi ograničili vertikalno kretanje žice i tako sprečili lažno aktiviranje senzora zbog vibracija vozila. Trenutni status senzora je bio predstavljen sa četiri varijable stanja.
Slika 3-1.
Taktilni senzori koji se nalaze na četiri ugla CRAWLER robota (vidi poglavlje 1) napravljeni su od gitarske žice i provučeni kroz središte dve male matice. Kao i CRAWLER robot, i ROBART I se takođe u velikoj meri oslonio na taktilne senzore za dobijanje povratne informacije za otkrivanje sudara (vidi takođe Poglavlje 10). Sonda bazirana na pipku od gitarske žice mehanički je malo nadograđena (Slika 3-2) i iskorišćena na školjkama automobila kao detektor ivičnjaka. Cilindrična metalna čaura je prilagođena donjem delu senzora i električki izolovana od njega pomoću kratke plastične cevi smeštene u donjoj polovini metalne čaure kao što je prikazano naslici. Svaki značajan otklon merne sonde prouzrokovao je da ona dolazi ukontakt s gornjim otvorom na koaksijalne čaure, zatvorivši strujno kolo. Dodatnidodirni senzori koji se koriste na ROBART-u će biti obrađeni kasnije u poglavlju 3.1.2.

Slika 3-2.
Dodirne sonde upotrebljene na ROBART I su proiyvedene od automobilskih senzora ivičnjaka. Napravljeni po uzoru na senzorne antene pojedinih insekata, aktivni senzori suzanimljiva varijanta kategorije dodirnih senzora koja uključuju neku vrstu strategije mehaničkog pretraživanja radi povećanja korisnosti i proširenja pokrivenosti prostora. Budući da se pasivni senzori koji su gore opisani oslanjaju na relativno kretanje između robotske platforme i detektovanog objekta, aktivni senzori se nezavisno kreću u okviru svog raspona prema zadatom obrascu pretraživanja. Kaneko (1994) opisuje takav sistem koji koristi mali rotacioni pokretač za upravljanje i fleksibilni pipak (ili antenu) u horizontalnoj ravni (Slika 3-3). Na osnovu pažljive analize odnosa između detektovanog obrtnog momenta i i rotacionog otklona pokretača nakon učinjenog inicijalnog kontakta, može se izračunati dužina kontakt na kraku pipka. Dužina trajanja kontaktana kraku pipka odgovara stvarnom dodiru duž pipka. Sličan sistem aktivnih antena koji je prijavio Ferrel (1994) koristi se na robotu sa šest nogu Attila koji je razvijen na MIT Artificial Intelligence Lab u Cambridge, MA.
Slika 3-3.
U ovoj konfiguraciji aktivne antene, tačka stvarnog kontakta fleksibilnog pipka može se odrediti o;itavanjem vrednosti otklona 8 nakon prvog kontakta, i odgovara induciranom momentu uvrtanja (prilagođena iz Kaneko, 1994, ® IEEE).
3.1.2 Taktilni Odbojnici
Jedan od najjednostavnijih dizajna taktilnih obojnika, rasporstranjena u AGV aplikacijama, sastoji se od fleksibilne metalne ploče pričvršćene na jednom kraju i savijene u obliku zaštitnog odbojnika ispred vozila. Drugi kraj ploče je nategnut tako da ima jedan stepen slobodnog hoda, tako da bilo kakav unutrašnji pritisak na ploču prouzrokuje bočni pomak slobodne ivice od nategnutog karaja, aktivirajući u tom procesu neki oblik kontaktnog uređaja za zatvaranje strujnog kola (Gat, et al., 1993).
Ovaj koncept je u mnogim aspektima sličan prethodno opisanom sezoru koji radi na principu žičane petlje upotrebljenom na robotu CRAWLER, ali uz povećanje vertikalne pokrivenost (tj. neki odbojnici ovog tipa su 18 inča visoki). Rowan (1988) opisuje alternativni instrumentalni metod u kome se mala retroreflektivni meta nalazi na zadnjoj strani fleksibilne metalne ploče, u koju je uperen u snop naprijed postavljenog fotoelektričnog senzora montiranog na prednjoj strani vozila. Ako se odbojnik pomeri usled fizičogi dodira s nekom preprekom, retroreflektor se lateralno pomera od foto-senzora. Još jedna varijacija na tu temu uključuje korištenje naduvavanja vazdušnog jastuka u praznini između branika i prednjeg dijela vozila. Bilo koji spoljni kontakt ssa preprekom naknadno prouzrokuje povećanje pritiska vazduha unutar vazdušnog jastuka, pokretajući sklop dijafragmalnog prekidača koji zaustavlja kretanje napred.
Cela prednja ploča ROBART-a mehanički pluta na nategnutoj opruzi i formira kontaktnu ploču koja šalje povratnu informaciju u slučaju kontakta (Slika 3-4). Osim toga, sve vodeće strukturne ivice su zaštićene na bočnim dijelovima aluminijumskim profilima koji aktiviraju mikro prekidače u slučaju kontakta sa preprekom. Fleksibilni najlonski nastavci vire sa obe strane baze

pokrivajući za zadnje točkove. Trba takođe primetiti i vertikalno postavljene dodirne senzore opisane u prethodnom odeljku.
Slika 3-4.
Izgrađen pre uvođenja rasponskog modula Polaroid-a, ROBART I je izdašno bio opremljen taktilnim odbojnicima i mernim sondama za otkrivanje kontakta. Oslanjajući se više na sonar i daljinske detektore za zaštitu i izbegavanje sudara, ROBART II ima samo dva taktilna senzora u obliku obodnih odbojnika koji se nalaze na spoljnoj ivici njegove pokretne osnove. Svaki set branika se sastoji od slobodno plutajućih plastičnih traka uvučenih u fiksno kućište, sa oprugom u prirodno istegnutom položaju. Serija mikroprekidača je ugrađena iza tih kućišta, tako da se svaki pojediačni prekidač uklučuje bilo kakvim otklonom na plastičnoj traci. Kada branik dodje u kontak s drugom površinom, plutajuća traka se lokalno ugiba i aktivira odgovoarajući mikroprekidač i tako pruža geometrijsku rezoluciju tačke dodira. Ta prouzrokovana situaciona svest omogućuje inteligentnu reakciju pvraćaja u prethodno stanje pomoću softvera za izbegavanje sudara, dok konfiguracija kućište služi i kao zaštitni odbojnik površine osnove robota.
Slika 3-5.
Opružni dodirni odbojnici na ROBART II su dizajnirani da aktiviraju niz mikroprekidača prilikom lokalnog pritiska, pružajući geometrijsku rezoluciju tačke udara. Najznačajnija komponenta ovog dizajna kontinuiranog branika je ugaoni deo (Slika 3-5), dizajniran s pod oštrim uglom na oba kraja uparen sa plutajućom trakom u linearnom nizu. Kad detektujuća površina dođe u dodir s drugom površinom, ona će pritiskati plutajuću traku, i time aktivirati mikroprekidač najbliži uglu. Ugaona konstrukcija takođe omogućuje bočno pomeranje traka unutar svojih ležišta reagujući na dodire pod kosim uglom.
Slika 3-6.
Dodirni odbojnici korišćeni na LabMate-u koriste tečni penušavi materijal odvojeno od fleksibilne metalne stražnje ploče sa zadnje strane izolacijske mreže (specifičnost Transitions Research Corp). Transitions Research Corporation (TRC), Danbury, CN, koristi i prednje i zadnje dodirne odbojnike na njihovoj LabMate osnovi (Slika 3-6). Metodologija istraživanja je kontaktno zatvaranje strujnog kola, ali primena u praksi je samo nešto malo elegantnije rešenje od mnoštva elektromehaničkih mikro-prekidača koji se koriste na ROBART n. Svaki branik predstavlja višeslojni set podupiran metalnom fleksibilnom pločom kao podlogom pričvršćenom na svakoj strani osnove kao što je prikazano. Sloj tečnog penušavog materijala je postavljen ispred te podloge od metalne ploče, električni i mehanički međusovno izolovan plastičnom mrežom i pokriven sa spoljne strane zaštitnom gumenom oblogom. Svaki značajan uticaj na spoljnu kožu ovog "sendviča" prouzrokuje deformacije tešne pene, potiskujući je trenutnokroz rupe u izolacionoj mreži proizvodeći električni kontakt s metalnom podlogom. Jedan nedostatak ove šeme je karakterističan nedostatak detektovanja pozicione rezolucije u strogo binarnom režimu (tj. kontakt / ne-kontakt) rezultirajuće izlazne snage.

Umjesto instrumentlizacije cele površine branika, Cybermotion K2Anavmaster dizajn, prikazan na slici 3-7 u nastavku, jednostavno uključuje podesive merače otklona u konzolnoj pomoćnoj ruci da bi se detektovao bilo kakav kontakt. Manji problem s ovim pristupom je povremeno lažno aktiviranje zbog inercijskih opterećenja koje stvara vertikalno ubrzanje seta branika kada se prelazi preko malih pukotina ili neravnina na podlozi. Ako je pravilno prilagođen stvarnim uslovima mesta, koncept radi jako dobro s minimalnim problemima. Korišćenje odvojenh levih i desnih senzora omogućuje u ograničenoj meri i geometrijsku rezoluciju tačke udara.
Slika 3-7.
Taktilni odbojnici na Cybermotion K2A Nawmaster robotu konfigurisani su zaaktiviranje senzora sa podesivim pragom deformacije leve i desne pomoćne ruke (Cybermotion, Inc)
3.1.3 Nizovi distribuiranih površina
Ponegde se može primetiti rastući trend (u svakom slučaju u istraživčkom delu kompanija) da ka ugrađivanju taktilnih polja koja pružaju dvodimenzionalno profiliranjeobjekta kontakta. Kao dodatak geometrijskoj rezoluciji tačke dodira, mnoge od tih strategija također omogućuju i kvantifikaciju kile kontakta. Rani programi uključivali su prilično male pravougone strukturne nizove usmjerene prema komponenti identifikacije i/ ili orijentacionog detektovanja, orijentisanog na industrijsku robotiku, i solidno su sažeti u anketama koje predstavljaju Harmon (1983), Dario, et al., (1985), Pennywitt (1986), Nicholls i Lee (1989), i Grahn (1992).U novije vreme pojavilo se interesovanje u razvoju neprekidne oplate kao senzorskog niza koji bi mogao biti direktno ugrađen u celu spoljašnju oplatu manipulatorne ruke ili čak celog robotskog vozila. Grahn (1992) opisuje taktilni niz napravljen od strane Bonneville Scientific, Salt Lake City, UT, koji koristi red ultrazvučnih odašiljača i prijemnika za merenje debljine gumene podloge. Svaki element senzorskog niza prenosiultrazvučni puls koji se odbija od spoljne površine gume i vraća se usenzor i time omogućava precizno merenje pređene putanje, tj površine. Kontakt sa spoljnim objektom prouzrokuje kompresiju gume I naknadno smanjuje izmereno vreme leta (vidi takođe poglavlje 5). Trenutno 256-elementsko senzorsko polje (Model 200-16 X 16A) je kruta ravna struktura koja se sastoji od keramičkog materijala kao podloge, PVDF sonde i elastomernog jastuka kao pokrivača. Merritt Systems, Inc, (MSI) Merritt Island, FL, razvija kontinuirani fleksibilni niz taktilnih i temperaturnih senzora u okviru Small Business Research programa pod komandom Naval Command Control i Ocean Surveillance Center, San Diego, CA.
Cilj je proizvesti prilagodljivi materijal sličan koži koji sadrži distribuirana polja taktilnih i temperaturnih senzora koji se može iseći u bilo koji željeni oblik za pričvršćivanje na robotskiu manipulativnu ruku ili strukturu kućišta mobilnih robotskih vozila. Kompanija je već razvila metodologiju za postavljanje mini ultrazvučnih i gotovih infracrvenihinduktivnih senzora na fleksibilna osnovni materijal koji uključuje ugrađeni matricusnage i komunikacijski prenosnik (MSI, nedatirano). Sve do konstrukcije 1022 SmartSensor moduli mogu biti konfigurisani kao jedna “senzorska koža” (Wing, 1995). “Koža” možebiti prilagođena tako da bude omotana oko robota u jednom komadu (PM, 1995).

3.2 Induktivni senzori
Induktivni senzori se koriste za određivanje prisutnosti (za razliku od stvarnog raspona) obližnjih objekata, razvijeni su kako bi povećali domet senzorskog raspona preko onoga koji pružaju direktni kontaktni ili haptički senzori. Nedavni napredak u elektronskojtehnologiji je značajno pobiljšao performanse i pouzdanost, usled čega je platforma 76 Senzora za mobilne robote povećala broj mogućih aplikacija. Kao rezultat toga, mnoga industrijska postrojenja koja su istorijski gledano koristila mehaničke prekidače graničnih vrednosti sada mogu birati izmedju raznih alternativnih beskontaktnih uređaja za njihovu upotrebu (osetljivosti od predmeta veličine delića inča do nekoliko inča).
Takvi senzori su bliže razvrstani u nekoliko tipova u skladu s posebnim svojstvima koja se koriste za iniciranje pojedinih radnji:
• Magnetski.• ultrazvučni.• optički• Induktivni.• Mikrotalasni• Kapacitivni.
Karakteristika dobre pouzdanosti prikazana od strane ovih senzora učinila ih je dobro prilagodljivim za rad u otežanim uslovima ili u drugom nepogodnom okruženju, a pored toga karakteriše ih i brzo reagovanje i dug vek trajanja. Instrumenti mogu biti dizajnirani kako bi odolevali značajnim udarcima i vibracijama, pri čemu su neki sposobni da podnesu silu od 30.000G i pritisak od skoro 20.000 psi (Hall, 1984). Burreson (1989) i Peale (1992) raspravljali su o prednostima i kompromisima vezanim za izbor blizinskih senzora za primenu u izazovnim i teškim uslovima. Osim toga, blizinski uređaji su veoa korisni za otkrivanje objekata koji se kreću velikom brzinom, kada fizički kontakt može prouzrokovati oštećenja ili kada potrebno razlikovati metalne i nemetalne objekte. Ball (1986), Johnson (1987), i Wojcik (1994) dali su opšti pregled raznih blizinskih senzora sa predloženim smernicama za izbor pojedinih senzora prema potrebama.
3.2.1 Magnetnii induktivni senzori
Magnetni induktivni senzori uključuju cevaste prekidače, uređaje koji koriste Hall-efekat i magnetootporne senzore.
Magnetni cevasti prekidači
Najjednostavniji oblik magnetskih senzora blizine je magnetni cevasti prekidač, shematski prikazan na slici 3-8. Par niskootpornih feromagnetskih cevi je poduprt na suprotnim krajevima hermetički zatvorene cevi, podešen kao da su njihovi vrhovi preklapaju lagano, bez dodira. Ekstremni krajevi cevi imaju suprotan magnetni polaritet izložen spolnjim magnetskimn

strujama, dok privlačna sila u razmaka povlači fleksibilnu cev kako bi ostvarili električni kontakt (Hamlin, 1988).
Slika 3-8. Hermetički zatvorena magnetska cevasta sklopka, prikazuje ovdje normalno otvorenkontakt, ispunjea inertnim plinom i otporna na prašinu i korozije.
Slika 3-9.
Fotografija zadnjih pristupnih vrata na ROBART II, prikazuje mesto (gornji spoljni uglovi) prekidač magnetni prekidač brave vrata (lijevo) i njegov pripadajući permanentni magnet (desno). Dostupan u obe konfiguracije - normalno otvorenim i normalo zatvorenim konfiguracijajae, a uz to jeftim I robustan uređaj, obično se koristi kao obično koriste kao zatvarač vrata i prozora na sigurnosnim uređajima. Magnetska cevasta sklopka ove vrste je instalirana na ROBART II za praćenje stanja na zadnjim pristupnim vrataima kao što je prikazano na slici 3-9.
Efekti Hall-ovih senzora
Hall efekt, kao što je poznato, je otkrio E.H. Hall 1879. Hall je uočio vrlo mali napon koji se generiše u poprečnom smeru preko provodnika struje u prisutnosti spoljnog magnetskog polja (Slika 3-10), u skladu sa sledećom jednačinom (White, 1988):gdje je:VH - Hallov naponRh = materijalni-koeficijent zavistan od Hall/ = Struja u pojačaluB - magnetska indukcija (okomito 7) u Gausst - element debljine u centimetrima.
Slika 3-10.
1879, E.H. Hall otkrio je mali poprečni napon generisan preko provodnika struje-u prisutnosti statičkog magnetskog polja, fenomen sada poznat kao Hall efekt (prilagođeno iz Lenz, 1990). Sve do pojave tehnologije poluprovodnika (objavljeno sa pronalaskom tranzistora 1948) nije bilo uzimano u obzir da se ova važna pojava može praktično iskoristiti. Čak i tako, rane silicijumske implementacije nisu bile popularne zbog nedostataka koji su usporile šire prihvatanje, uključujući visoke troškove,temperaturne nestabilnosti i inače lošu pouzdanost (McDermott, 1969).
Naknadni napredak u tehnologiji integrisanih sklopova (tj. monolitnog dizajna, novih materijala i unutrašnje temperaturne nivelacije) su značajno poboljšali i stabilnost i osjetljivost. Uz 100-milliamp. protok struje kroz indijum-arsenid (InAs), na primjer, izlazni napon od 60 milivolte može biti generisan zbog gustoće protoka (B) u 10 kiloGauss (Hines, 1992). Veliki obim aplikacije u automobilskoj industriji (kao što je distributer vremena u elektronskom sistemu paljenja) je pomogao progurati ove tehnologije u prvi plan u kasnim 1970-im (White, 1988).

Potencijalna primena u robotici uključuje detektovanje položaja i brzine(Manolis, 1993), (poglavlje 11), a Magnetski kompasi (poglavlje 12). Linearni odnos izlaznog napona i intenziteta poprečnog magnetskog polja je važna stavka koja doprinosi sadašnjoj popularnosti Hall-efektsenzora. Kako bi se poboljšala stabilnost, linearni Hall-efekt senzori u pravilu su ukomponovani s integrisanim regulatorom napona i izlaznog pojačala kao što je prikazano u bloku dijagrama na slici 3-11. Izlazni napon Vo fluktuira iznad i ispod nultog polja pozicije ravnoteže (obično pola napona napajanja VCC), s magnituda i smer izlaza određuje jačinu polja i polaritet, (White, 1988). (Imajte na umu da je bilo odstupanja u području, smjer od okomitog takođe će uticati na veličinu napona i otklon) Frekvencije iznad 100 kiloherca lako je postići (Wood, 1986).
Slika 3-11.
Linearni Hall-efekt senzor ugrađen je sastavni regulator napona i stabilanDC izlaz pojačala zajedno sa Hall-efekt elementom - prikazano na slici 3-10, prethodnogore (White, 1988). Dodatni Schmitt okidač praga-detektora pretvara linearno odgovarajući izlaz Hall-efekt senzora u digitalni Hall-efekt prekidač. Većina komercijalno dostupnih uređaja koristi tranzistore koje otvoraju strujno kolo u odsutnosti magnetskog polja (Wood, 1986). Detektorska tačka je postavljena na nominalnoj vrijednosti iznad polja nulte ravnoteže napona, i kada se taj prag prekorači prebacuje izlazne na stanje na izvor ili ulaz, zavisno o tome da li su PNP ili NPN tranzistori postavljeni kao drajveri. Glavno dostignuće ovog pristupa je utvrđenaneosjetljivost Hall-efekt prekidača na obrnuti magnetski polaritet. Dok će i samo približavanje južnom polu stalnog magneta aktivirati sklopku, čak i neposredan kontakt prema severnom polu neće imati nikakvog uticaja na prebacivanje delovanja, kao da povećan izlazni napon zapravo pada niže od zadate vrednosti Schmitt okidača. Prebacivanje reaguje vrlo brzo, obično u 400-nanosekundni (Wood, 1986).
Magnetno-otporni senzori
Kod anizotropnih materijala, visina određene vrednosti ovisi o smjerumerenja, za razliku od izotropnih materijala, koji pokazuju iste vrednosti za merenje svim smerovima merenja. Anizotropija može zavisiti od oblika, od materijala, njegove kristalne struktura, odnosno unutrašnjeg naprezanja (Graf, 1974). Na primjer, smer magnetizacije u feromagnetskom kristalu će biti usmeren uz osu određenu osom kristala, ooznata kao "lagani" ili preferisani smer magnetizacije (Barrett, et al., 1973). Promena ovog smera magnetizacije (u odnosu na smer strujnog toka) u provodljvom materijalu primjenom nekog sopljnog magnetskog polja Hy će rezultirati promenom otpora p materijala, fenomen poznat kao magnetootporni efekat. Ilustracije radi, rotiranje magnetizacije tankog lsoja anizotropnih permalloya preko 90 stepeni, prouzrokuje najviše promjene u otpornosti od 2 do 3 posto, Dibburn & Petersen, 1986). Na niskim temperaturama, određeni materijali (kao što je bizmut) mogu biti pod uticajem faktora visokih kao što je 106 (Fraden, 1994). Odnos otpora na ugao 0 između smjera magnetizacije i smjera protoka struje je dat od strane (Dibburn & Petersen, 1986):gdje je:p = otpor (otpor po jedinici volumena)

p0 = izotropni otporApmat = maksimalna moguća promena otpora (što je rezultiralo sa 90 stepenirotacije)9 = ugao između magnetizacije i smer protoka struje.
U prisustvu poprečnog polja Hy (Slika 3-12A), izvorni smer magnetisanja Mo permalloy trake će ispojiti ponašanje prikazano na slici 3-12b. Kako se primijena polja Hy povećava, promjena otpora povećava se kao što je prikazano do tačke zasićenja, što je postignuto kada ugao rotacije 0 postaje jednak do 90 stepeni, nakon čega nije moguće dalje povećanje (Petersen, 1989). Simetrija na parceli (Slika 3-12B) u odnosu navertikalni osu podrazumeva vrednost otpora dva moguća izvorna smera magnetizacije (tj. + MO,-Mo) ili znak poprečnog polja (npr., + Hy, - Hy).
Slika 3-12.
Permalloy traka s izvornim smjerom namagnetisanja Mo kao što je prikazano u (A) ćepokazati odgovor (B) koji je nezavistan od smera spoljnog poprečnog polja Hy(Prilagođeno iz Petersen, 1989). Ako demagnetizacija i anizotropna polja teže uskladiti magnetizacije u smeru protoka struje predstavljene sa Ho, tada je:i tako za Hy <Ho:dok je p = PO za zasićenja uvjetima u kojima Hy> Ho (Dibburn & Petersen, 1986).
Najdirektniji problem s tim odnosom (osim kod nehomogenih legura) je njegova nelinearnost. Kwiatkowski i Tumanski (1986) du dali pregled raznih načina za magnetne i magnetootporne uređaje kako bi se mogao izvršiti izbor (Hy mnogo manja od Ho).
Najčešći metod je magnetizaciona konfiguracija "razdavajanje-polova", gde se zlatne (Dibburn & Petersen, 1986) ili aluminijumske (Petersen, 1989) trake pričvršćuju na vrhu svake permalloy trake pod uglom od 45 stepeni. Mnogo veća vodljivost zlata (ili aluminijumske trake) u odnosu na permalloy rezultira u obrtanje smera strujanja pod 45 stupnjeva što je prikazano na slici 3-13A. Neto učinak na funkciju prenosa prikazan je na slici 3-13B, što pokazuje p povećava se linearno s Hy, i male vrijednosti Hy u odnosu na ho (Dibburn & Petersen, 1986). Dopunska konfiguracija razdvajanja polova, gde su trake su orijentisane-45 stepeni na osu permaloy trake, rezultira u linearnom smanjenju p sа povećanjem Hy. U svakom slučaju, za merenje promene otpora je pouzdano i tačno sredstvo za otkrivanje vrlo male varijacije u primenjenom magnetnom polju duž određene ose.
Slika 3-13.
Šema magnetisanja “razdvajanjem polova” okreće smer protoka struje 45 stepeni (A)da bi se postigao linearan odnos (B) između otpora p i senzorskog magnetnog polja HY (Dibburn I Petersen, 1986).Tipičan anizotropni magnetootporni (AMR) senzor je izrađen od četiri seta permalloy traka, svaka pričvršćena na silicijumsku podlogu prema raster obrascu i povezana kao što je prikazano na slici 3-14 da se formira Vitstanov most. Dijagonalno suprotni elementi mosta su postavljeni tako da se jedan par p povećava sa Hy, dok se drugi par p smanjuje. Ovo konfiguracija

komplementarnog mosta služi uglavnom da bi se eliminisali učinci common-mode izotropnih varijacija kao što su temperatura, dok efikasno duplira osetljivost senzora (Dibburn & Petersen, 1986).
Slika 3-14.
Četiri rasterski postavljene permalloy trake povezane u obliku Vitstanovog mostakod tipičnog anizotropnog magnetootpornog (AMR) senzora (Fraden, 1994).Drugi problem povezan sa magnetootpornoim senzorima nastaje zbog bistabilne priroda unutrašnjeg smera magnetisanja. Željeno namagnetisanje se postavlja uz osu permalloy trake pomoću primene jakog magnetnog polja tokom proizvodnog procesa. Kombinacija anizotropne strukture i geometrijske konfiguracije (u uvećanoj razmeri) znači da ćesmer magnetisanja uvek imati tendenciju da se uskladi s uzdužnom osomtrake, čak I u nedostatku spoljnog magnetskog polja (Philips). To aksijalno poravnanje, međutim, može postojati u dva moguća smjera, svaki smer u rasponu od 180 stepeni. Izloženost jakom spolnom magnetnom polju suprotnom unutarnjem magnetnompolju može izazvati da namagnetisanje “preskoči” tj. naglo se promeni u smeru unutarnje namagnetisane trake i radikalno promeni senzorska svojstva (Slika 3-15). Za većinu aplikacija pomoćno polje hx mora biti uspostavljeno duž trake kako bi se osigurala stabilnost u željenom smjeru, tako da unutrašnji magnetbu senzor ne "preskače" (Petersen, 1989). Ovo "preskakanje" tj. anomalija, međutim, može se dobro iskoristiti u dizajnu magnetnootpornog kompasa, kao što će biti objašnjeno kasnije upoglavlju 12.Jedan od načina da se obezbedi ove pomoćno magnetsko polje je kroz korišćenje malih trajnih magneta ili kalemova pod naponom. Iznos otklona optimiziran je za pružanježeljene osjetljivosti i linearnosti (vidi ponovno sliku 3-13), ali zadržava se dovoljnoispod tačke zasićenja na krivulji, kako bi se spečilo “preskakanje” (Lao, 1994). Slika 3-16 prikazuje primer uređaja AMR razvijen od strane Space Electronics, Inc,San Diego, CA, koja uključuje sastavni solenoidni niz kalemova u 14-pinskojkeramici DIP paketa (SEI, 1994a; 1994b). Magnetootporni element u MicroMag MMS101 se nalazi u procepu između dva film-tanka permalloy koncentratora tokada povećavaju osetljivost na osi polja za faktor 20, a istovremeno štite i smanjuju ortogonalnu komponentu prema magnitudi (SEI, 1994b; Lao, 1994). Odabrane specifikacije uređaja su navedene u tablici 3-1.
Slika 3-15.
Prijenosna funkcija "normalnog" magnetootpornog senzora (puna linija) sanamagnetisanjem orijentisanim u smjeru X+, i "preskočeni" senzor (isprekidane linije) orijentisan u X- smeru (Philips). Godine 1988, francuski fizičar po imenu dr. Albert Fert na Sveučilištu u Parizu uspeo je u nastojanjima da pojača magnetootporni učinak krozizradu više tankih slojeva magnetootpornih materijala (Baibich, et al.1992).
Takvi džinovski mangnetootporni uređaji (GMR), kako se sada nazivaju,pokazuju mnogo veći učinak nego konvencionalni učinak magnetootpornih senzora AMR (Henkel, 1994), što je rezultiralo sa od tri do 20 puta više izlaznih signala (Brown, 1994). Još

važnije, GMR uređaji su linearni u mnogo većem delu svog operativnog raspona, zbog čega ne pokazuju karakteristično ponašanje "prskakanje" AMR senzora, a time ne zahtevaju dodatnu instalaciju fiksnog magnetnog polja (Brown, 1994). Sirovi signal je dva puta jači od onog povezanog s Hall-efekt senzorima koji rade u sličnim aplikacijama (npr., blizina, položaj, brzina, orijentacija, detektovanje), i zahtijeva primenu manjeg polja da bi se dobio pun izlaz (NVE). Brown (1994) navodi tri značajne prednosti GMR senzora u odnosu na uređaje bazirene na Hall-efektu u palikacijama za lociranje:
• Povećana izdržljivost (jaz) između senzora i magneta ili geartooth.• Poboljšana tolerancija visokih temperatura (> 200 ° C).• Superiorna temperaturna stabilnost.
GMR senzori su proizvedeni od više tankih slojeva filma magnetskog materijala u sendviču između naizmeničnih slojeva ne-magnetskih provodljivih međuslojeva. Princip rada zasniva se na činjenici da provodljivi elektroni mogu imati dva suprotna spin stanja, i njihova spin polarizacija (spin-stanje, svejedno) u magnetskom materijalu određuje se prema smeru u kojem se vrši namagnetisanje materijala (Brown, 1994). Električna provodljivost materijala direktno je proporcionalna sredini slobodnog puta provođenih elektrona provođenja, u skladu s jednačinom:mvgde je:- provodljivost materijalan = broj elektrona provođenjaq = naboj elektrona/ = slobodan put elektrona u materijalum = masa elektronav = prosečna brzina elektrona u materijalu.
GMR senzori u osnovi menjaju svoju provodljivost promenom srednjeg slobodnog putaprovođenja elektrona u sendviču kao funkcija primene magnetnog polja. Da bi se postigao ovaj učinak, promenljivi magnetni slojevi u sendviču GMR se magnetišu (tokom izrade) u antiparalelnom nizu, a time i njihova provodljivost elektona u suprotnim smerovima. Srednji ne-magnetski međuslojevi služe za odvajanje dve magnetske trake. Provođeni elektroni pokušavaju preći granicu između slojeva sa suprotnim spinskim polarizacijama i imaju visoku verovatnoću raspršenja na krajevima, što rezultirala relativno kratkim slobodnim putem, a time i niskom provodljivosti (Brown, 1994). Prisutnost spoljnog magnetskog polja teži da rotira antiparalelno namagnetisanje ose i naizmeničnih slojeva u suprotnim pravcima prema zajedničkoj ortogonalnoj osi. Provođeni elektroni pokušavaju preći na spojevima multi-sloja što pod tim uslovima naknadno dovodi do manje mere raspršenja, uz odgovarajući porast njihoveslobodne staze. Primer komercijalno dostupnih uređaja GMR se najčešće vidi uNVS5B50 GMR senzoru koji nudi Nonvolatile Electronics (NVE) of Eden Prairie, MN. NVE senzor se sastoji od četiri 4.7K GMR "otpornika" raspoređena u konfiguraciji Vitstanov most kao što je prikazano na slici 3-17a (Henkel, 1994). Dva od tih otpornika su zaštićena od uticaja spoljašnjih polja debelim magnetskim materijalom, dok se ostala dva nalaze u procepu između dva koncentratora toka kao što je prikazano na slici 3-17b. Najveću moguću promenu otpornosti dva aktivna "senzorska" otpornika daje izlaz mosta od pet posto napona napajanja, u poređenju s manje od jedan posto za slične AMR dozajne (NVE).

NVS5B50 daje linearni izlaz u rasponu od 0 do ± 35 Gaussai dostupan je u 8-pinskoj površinskom setu.
Slika 3-17.
Ekvivalentno strujno kolo (A) i šematski crtež (B) za Nonvolatile Electronics, Inc., NVS5B50 GMR mostni senzor uključuje sastavne koncentratore toka u 8-pin površinskom paketu IC (prilagođena iz Daughton, et al., 1994). Jedna od najčešćih robotskih aplikacija AMR i GMR senzora vidimo u prmeni deduktivnog proračuna na tokovima, prikazano na slici 3-18. Drugi načini primene je kod elektronskih kompasa (Petersen, 1989), merenja ugla pomeranja, detektovanja toka struje, i opšteg merenje magnetnog polja (Henkel, 1994).
Puls PrstenjeSenzori točkovaNavigaciona elektronika
Slika 3-18.
Predloženi sistem za navigaciju vozila primenjuje AMR senzore za elektronsku orijentaciju (vidi poglavlje 12) i diferencijalnu odometriju točkova (Petersen, 1989).
3.2.2. INDUKTIVNI SENZORI BRZINE
Induktivni blizinski prekidači su danas najčešće korišteni industrijski senzori (Moldovenu, 1993) za otkrivanje predmeta crnih i obojenih metala (tj. Čelik, mesing, aluminujum, bakar), na kratkim rastojanjima. Cilindrične konfiguracije veličine 4 milimetra (prečnika) su dostupne više od decenije (Smit, 1985). Zbog prenosive sposobnosti da osete kroz ne-metalne materijale, ovi senzori mogu biti obloženi, konzervirani ili na već neki drugi način zapečaćeni, omogućavajući rad u kontaminiranim delovima rada, ili čak potopljenih u tečnost.Reagovanje frekvencije do 10 KHz može tipično (obično) da se postigne (Kar, 1987). Induktivni blizinski senzor generiše oscilatono RF polje (tj. 100KHz do 1 MHz) oko kalema žice uglavnom namotanog oko feritnog jezgra. Kada metalni predmet ulazi u definisano polje projektovanja iz lica senzora pobuđene struje su indukovane u ciljnu površinu. Ove vrtložne struje proizvode sekundarno magnetno polje koje stupa u interakciju sa poljem sonde, čime puni oscilator sonde. Efektivna impedansa promena kalema nastalih ispitavanjem sondom, dovodi do smene frekvencije oscilatora (ili promena amplitude) koji se pratvara u izlazne signale proporcionalne osetnom jazu (razmaku) između sonde i cilja. Blok šema (dijagram) tipičnog induktivnog senzora blizine je prikazan na slici 3-19A. Oscilator se sastoji od aktivnog uređaja (tj. tranzistor ili IC) i sam senzor sonde kalema. Ekvivalentno kolo (slika 3-19B) koje predstavlja ovu konfiguraciju je prikazao Kar (1987) gde je sonda kalema modelovana kao induktor Lp uz seriju otpornika Rp, povezujući (vezni) kabl između kalema i aktivnog elementa prikazanog kao kapacitet C. U slučaju tipičnog Kolpits oscilatora, sonda-kabl kombinacija je deo rezonantnog kola frekvencije rezervoara. Kada provodna meta uđe u polje, efekti otporne komponente Rp, dominiraju, i otporni gubici rezervoara kola se povećavaju,

puneći (tj. prigušujući) oscilator (Kar, 1987). Kako još postoji manji, izlazna amplituda oscilatora takođe nastavlja da se smanjuje, dok ne dostigne tačku gde se oscilacije ne mogu održati.Ovaj efekat dovodi do posebne nomeniklature na vrtložnu struju pokvarenog oscilatora (ECKO) za ovu vrstu konfiguracije. Osetni propust manji od praga minimuma (obično od 0,005 do 0,020 inča) nisu kvantifikovani u smislu amplitude oscilatora koji je u korelaciji sa opsegom, i time čine približno krajnji (potpuni) opseg (krajnju podelu/grupu) oblasti za koju nema analogni izlaz na raspolaganju.
Slika 3-19.
(A) Blok šema tipičnog ECKO tipa indukovanog senzora blizine (uzeto od Smita, 1985) , i (B) ekvivalentnog oscilatornog kola (uzeto od Kara, 1987). Praćenje oscilatora izlazne amplitude sa unutrašnjim pogonom detektora (slika 3-19A), stvara induktivni prekidač blizine sa digitalnim on/off (uključi/isključi) izlazom (slika 3-20). Dok metalna meta (cilj) prilazi licu senzora, izlazni napon oscilatora pada, kao što je prikazano i na kraju pada ispod postavljenog nivoa okidača, nakon čega prag komparatora prilazi sa „off“ stanja (isključenog) na „on“ stanje (uključeno). Povećanje rastojanja dovodi opet do povećanja napona i izlaz se isključuje dok je nivo ispuštanja (oslobađanja) prekoračen. Namerno mala razlika između nivoa okidača i nivoa oslobađanja se naziva histereza, koja sprečava izlazne nestabilnosti blizu granice detekcije. Tipične vrednosti histereze (u smislu razdaljine) je u rasponu od 3 do 20 procenata maksimalnog efektivnog dometa (Damak i Peroti, 1993).
Slika 3-20.
Mala razlika između okidača i nivoa puštanja (oslobađanja) (histereza) eliminiše izlaznu nestabilnost kao što se meta kreće unutar i van dometa (uzeto od Moldovena, 1993). Efektivni domet senzora je približno jednak prečniku čitača kalema (Koningzburg, 1982) i pod uticajem je ciljnog materijala, veličine i oblika. Industrijska standardna meta (cilj) (za koje je nominalna detekcija rastojanja navedena) je 1 kvadratni milimetar debljine, mekog čelika iste veličine kao prečnik senzora, ili 3 puta nominalne detekcije rastojanja, koje-god je veće (Flukiger, 1992). Za obojene metale, povećana debljina mete ima zanemarljiv efekat (Damak i Peroti, 1993). Više provodnih neobojenih ciljnih materijala, poput bakra i aluminijuma dovode do smanjenog opsega detekcije, kao što je prikazano na tabeli 3-2 ispod. Za ove neobojene metale veće očitavanje rastojanja (okvirno jednako tome od čelika) može se postići sa metama od tanke folije koje imaju debljinu manju od unutrašnjeg polja prigušene udaljenosti (Smith, 1985). Ovaj fenomen je poznat kao efekat folije i proizilazi od punog prodora RF polja, postavljajući dodatnu površinu vrtložnih struja na poleđini mete (Damak i Perioti, 1993).
Tabela 3-2. Nominalno očitavanje opsega za materijal, osim mekog čelika mora biti prilagođeno korišćenjem gore pomenutih faktora slabljenja (Smith, 1985). Postoje dva osnovna tipa induktivnih senzora brzine: 1)Zaštićen (slika 3-20 1A) i nezaštićen (3-21B). Ukoliko je nezaštićen uređaj montiran u metalnu površinu, brzina okolnog metala će efikasno zasititi senzor i potpuno isključiti (prekinuti) rad (Svenson, 1985).

Da bi se prevazišao ovaj problem, zaštićena (oklopljena) konfiguracija predstavlja koaksijalan metalni prsten koji okružuje jezgro, fokusirajući se na taj način (napred) i efekasnost sprečava bočnu detekciju (Flukiger, 1992). Postoji povezana kazna u maksimalnom efektivnom dometu međutim pošto zaštićeni senzori samo mogu da otkriju (detektuju) oko polovinu udaljenosti nezaštićenog uređaja ekvivalentnog prečnika (Svenson, 1985). Do međusobnog mešanja između induktivnih senzora blizine koji rade na istoj frekvenciji može doći ako instalirane jedinice sa bočnim razmakom dva puta manji od prečnika senzora. Ove smetnje se obično manifestuju u obliku nestabilnog pulsiranja izlaznog signala ili smanjenog efektivnog dometa, najverovatnije će se javiti u situaciji gde je jedan senzor ne prikazan, a drugi je u opsegu histereze (Smith, 1985). Polovina preporučenog 2d bočnog razmaka je generalno dovoljna za otklanjanje međusobne interakcije u slučaju zaštićenih senzora (Gacioz i Ben-Ari, 1986). Kada je montiranje konfiguracije obrnuto, ovo minimalno odstojanje treba da je udvostručeno.
Slika 3-21.
Zaštićeni induktivni senzori mogu biti ugrađeni u metal bez ikakvog uticaja na učina, dok ne zaštićeni induktivni senzori (B) moraju biti montirani isključivo na metalnu površinu (Flukiger, 1992). Dok većina standardnih induktivnih senzora blizine rade po ECKO principu i otkrivaju (detektuju) bilo koje i sve metalne materijale, neke aplikacije mogu da zahtevaju diferencijaciju između različitih vrsta metala. Mickro Switch division (podela mikro prekidača) Honey Well korporacija nudi seriju RF induktivnog ECKO senzora koja detektuje samo obojene metale (primarno gvozdene komponente), sa 10 do 15% smanjenja nominalnog opsega u odnosu na senzor na sve metale (Dickson, 1990). Zbog njihovo selektivnog ciljanja i izuzetno ograničenim opsegom očitavanja (detektovanja), induktivni senzori generalno imaju minimalnu upotrebu u sistemu mobilne robotike za svrhe spoljnog otkrivanja (detektovanja) predmeta, osim u primeni specifičnih slučajeva.
Slika 3-22.
Ovaj praskavi uređaj podrazumeva (isključuje) induktivne senzore brzine do zatvorenog ciklusa krajnjeg efektora u zatvorenom (zapečaćenom) kontaktu sa trupom broda (Barns i Rejnek). 90 senzora za mobilne roboteJedan takav primer uključuje veliki industrijksi manipulator, koji su razvili Barns i Rejner, Čikago Ilinois; koji čisti spoljašnja korita brodova u suvom doku sa čeličnom trakom na brusu (abrazivu) (Slika 3-22). Tri analogna induktivna senzora se koriste da osete prisustvo čelika na površini trupa u opsegu od 0 do 1,75 inča, kontrolišući servo mehanizam koji drži (čuva) manipulator podpredučitanim kontaktom, dok prelazi trup uklanjajući rđu i morski (brodski) porast (Henkel, 1985).
3.2.3. KAPACITIVNI SENZORI BLIZINE
Kapacitivni seznor blizine je veoma sličan prethodno razmatranom induktivnom senzoru blizine, s tim d akapacitivni tip može pouzdano da otkrije dielektrične materijale pored metala. Efekasni za detekciju kratkog dometa nekoliko inča ovakvi senzori reaguju na varijacije u električnoj kapacitivnosti između sonde (ili ploče) i njihove okoline. Kada se neki objekat (predmet) nađe blizu promena geometrije i/ili dielektričnih karakteristika u okviru dometa senzora prouzrokuje

povećanje kapacitivnosti. Ova promena kapacitivnosti može biti osetna na mnogo različitih načina: 1) Povećanje struje kroz sonde (Hol, 1984), 2) Pokretanje oscilacija u RC kolima (MekMeon, 1987), ili 3) Smanjenje frekvencije trenutnih oscilacija (Vreniš, et al, 1991). Tipične idustrijske aplikacije podrazumevaju (uključuju) nivo oseta za različite materijale (tj. Tečnosti, pelete i praškove/prahove) i detekciju proizvoda, posebno kroz ne-metalna pakovanja. Interesantno je da posebno namenjena primena za izbegavanje sudaranja robota se vidi u kapaciflektoru koji je napravio odsek za robotiku u Nasa-inom Godard centru za svemirske letove, GreenBelt, MD/ (doktor medicine GreenBelt). Cilj Nasa-e je bio da se prizvede zaštitni sloj detektora za blizine za upotrebu robotskih, manipulatorskih oružja i u industrijskim i svemirskim aplikacijama (primenama), sposobni da registruju čovekovo prisustvo do 12 inča. Normalno, ovaj tip zahtevajućeg opsega bi značilo montiranje kapacitivne senzorne ploče sa nerešenim pomeranjima (raseljavanjem) od oko inča od uzemljenja ruke (oružja) robota kao što je ilustrovano na slici 3-23A, stvarajući neprihvatljiv obim (opseg) i mehaničke smetnje (Vreniš, et al, 1991). NASA-in dizajn zasnovan na instrumentaciji tehnike za kontrolu odlutale (zalutale) kapacitivnosti (Vebster, 1988), eliminiše ovaj protivtežni (izjednačeni) zahtev, uvođenjem srednjih površinskih reflektora između oružja (ruke) strukture i senzorne ploče kao što je prikazano na slici 3-23B. U konvencionalnom slučaju (bez reflektora) prikazanog na slici 3-23A što je manja neodređena nerešena udaljenost to je veća kapacitivna spojnica između senzorne ploče i ruke robota, sa odgovarajućim smanjenjem snage na terenu projektovane daleko od senzora u pravcu objekta. Dodatak srednje aktivnog reflektora (koji se nalazi u fazi sa senzornom pločom) izaziva senzorske linije na terenu da se odraze daleko od strukture robota, čime je značajno povećan opseg moguće interakcije sa okolnim predmetima. Ekvivalentni efekat (u smislu povećanja opsega detekcije) velike izdržljivosti je postignut, ali bez dodavanja nepotrebnog opsega (obima, veličine) mehaničkoj strukturi robota, jer je efektivna razlika približno jednaka reflektivnom štitu, debljine od 0,06 inča (Vreniš, et al, 1991). Jedan elemanat prototipa izdržljivosti je pričvršćen za PUMA industrijski manipulator koji je demonstriran da rutinski otkrije čoveka ili aluminijumski strukturalni elemenat na udaljenosti od 12 inča, pa čak i manje objekte, kao što je olovo na grafitnoj olovci na rastojanjima od oko 5 inča, (Vreniš, et al, 1991).
Slika 3-23.
Linije električnog polja bez reflektora su prikazane na slici (A) dok upotreba reflektora pod (B), omogućavajući veći opseg detekcije (uzeto od Vreniša, et al, 1991).
3.2.4. ULTRAZVUČNI SENZORI BLIZINE
Svi prethodni senzori blizine su se oslanjali na prisustvo mete da direktno promene električne karakteristike ili svojstvo (osobine) (tj. Induktivnost, kapacitivnost) vezanih za sam oset (detekciju) strujnog kola. Ultrazvučni senzor blizine je primer reflektivnog senzora koji reaguje na promene u iznosu emitovane energije, vraćenog detektoru nakon interakcije sa ciljem interesa (intersnim ciljem). Tipični sistemi se sastoje od dva pretvarača (jedan za prenos, a jedan za prijem povratne energije), iako relativno spora brzina zvuka omogućava rad u režimu sa zajedničkim pretvaračem. Predajnik emituje longitudinalni talas u ultrazvučnoj oblasti akustičnog spektra (obično 20 do 200 KHz), iznad normalnih granica ljudskog sluha. Reakcija prijemnika je funkcija amplitude vraćene energije za razliku od proteklog vremena pre otkrivanja

(detekcije) eha. Ultrazvučni senzori blizine su korisni preko distanci od do nekoliko stopa za otkrivanje većine predmeta što u tečnom to i u čvrstom stanju. Ukoliko predmet uđe u akustično polje, energija se reflektuje nazad do prijemnika. Kao što je slučaj sa bilo kojim refleksnim senzorima, maksimum opsega detekcije je zavisan ne samo od nivoa emitovane snage (struje), već i od kvadranta pretraživanja mete, refleksivnosti i usmerenosti. Kada jednom primljeni signal amplitude dostigne podešeni prag, senzorni izlaz menja stanje ukazujući na detekciju. Delom zbog pojave jeftinih mikrokontrolora, ovakvi uređaji su u većini situacija bili zamenjeni svestranijim ultrazvučnim opsežnim sistemima (poglavlje 5), koji pružaju kvantitativni indikator udaljenosti do detektovanog predmeta.
3.2.5. MIKROTALASNI SENZORI BLIZINE
Mikrotalasni senzori blizine rade na udaljenosti od 5 do 150 stopa (metara) ili više (Vilijams, 1989) i veoma su slični ultrazvučnim jedinicama prethodno razmatranim osim što je elektromagnetna energija u mikrotalasnom delu RF energije spektra, emitovana. FCC je izdvojila 10.50 do 10.55 GHz i od 24.075 do 24.175 GHz za mikrotalasne senzore za narušen teren, ovog tipa (Šalc, 1993). Kada prisustvo dogovarajućeg cilja odražava dovoljnu energiju iz prenosne antene nazad na odvojenu prijemnu antenu (slika 3-24), izlazne promene stanja da iniciraju (ukažu na) predmet su prisutne unutar vidnog polja. Alternativna konfiguracija uključuje jednu prenosnu/prijemnu antenu, i prati Doplerovu osovinu izazvanu pokretnom metom da otkrije relativno kretanje što je suprotno trenutnom. Takva postavka je klasifikovana za naše potrebe kao senzor kretanja (razmatranom u poglavlju 17).
Slika 3-24.
Prisustvo mikrotalasnog senzora, za razliku od detektora pokreta zahteva poseban predajnik i prijemnik (uzeto od Vilijamsa, 1989).
AM senzori mikrotalasnih senzora blizine.AM senzori, Inc., Salem, MA, nudi raznovrsnosti blizine, pravca kretanja, raseljenja (pomeranja), nivoa i brzine senzora koji pokrivaju mnogobrojne industijske aplikacije. Njihovi proizvodi uključuju MSM 10500 seriju, FMCW mikrotalasnih senzora da obezbede bezkontaktnu poziciju u otkrivanju metalnih i ne-metalnih pokretnih predmeta (objekata). MSM 10500 senzor omogućava stalnu udaljenost informacija, indikaciju opsežno usmerenog položaja (opsega položaja ulaznog kola) i pravac kretanja MSM 10502 je podešen da oseti kretanje predmeta bila ka ili od senzora, i ukazuje distancu dok prolazi kroz tri ulazna kola dometa, koji može biti prilagođen bilo kakvom trenju (otporu) u maksimalnoj detekciji u dometu od 50m. Mikrotalasni deo jedinice koristi Gan-diod predajnik, dva mikrotalasna Mikser-diod prijemnika i varaktor diodu da menja emitovanu frekvenciju. Izlaz oscilatora je krakom antene fokusiran u vazduh, i svaki predmet koji se kreće kroz ovaj snop je detektovan. Signal formiranja automatizovane reakcije kola sadrži napajanje, pojačalo, komperator i mikrokontrolor da vodi oscilator i pretvara detektovane predmete u korisne kontrolne signale. Iznos proseka primenljivosti na svako očitavanje je podesivo, tako da korisnik može da bira između

maksimalnog izolatora buke i minimalnog vremena izlazne reakcije. Regulisano napajanje omogućava modelu da radi sa širokim spektrom ulaznih napona, kao što su automobilski sistemi i daje visoko električno odbijanje buke. Kada je meta unutar datog opsega, odgovarajući izlaz će se uključiti i ostati uključen sve dok je meta unutar tog opsega, što je u normalnim sredinama određeno da bude tačno unutar 6 inča. Ova tačnost može biti degradirna ukoliko postoji više pokretnih meta u opsegu ili ako meta ima mali odražaj (malu refleksivnost). Tačka gde će se opseg ulaznog kola uključiti za datu metu, se obično ponavlja unutar jednog inča.
Tabela 3-3. Izvođenje specifikacija AM senzora MSM 1050 i MSM 10502 mikrotalansnih senzora blizine.
3.2.6. OPTIČKI SENZORI BLIZINE
Optički (fotoelektrični) senzori obično se koriste za industrijsku primenu i mogu se podeliti u tri osnovne grupe: 1) Suprotne, 2) Retroreflektivne i 3) Difuzne (raširene). (Prve dve od ovih kategorija nisu zapravo „blizinski“ senzori u najstrožem smislu terminologije). Efektivni opsezi variraju od svega nekoliko inča do nekoliko metara. Uobičajene robotske aplikacije uključuju podno registrovanje, navigaciono referenciranje i izbegavanje sudara. Maksimalna enrgija blizu infracrvenog zračenja se koristi da smanji efekat ambijentalnog osvetljenja čime se ostvaruje potreban odnos signala i buke za pouzdan rad. Vidljivo crvene talasne dužine se ponekada koriste da pomognu u instalaciji usklađenosti i dijagnostičkih sistema. Stvarna efikasnost zavisi od nekoliko faktora. Ekeftivni domet je funkcija fizičkih karakteristika (tj. Veličine, oblika, refleksivnosti i materijala) predmeta da budu detektovan, njegove brzine i pravca kretanja, dizajn senzora, i kvalitet i kvantitet energije što zrači ili prima. Ponovljivost u detekciji (otkrivanju) zavisi od veličine ciljnog predmeta, promene u ambijentalnim uslovima, varijacije u reflekciji ili neke druge karakteristike materijala mete, i stabilnost svakog elektronskog kola. Jedinstvene radne (operativne) karakteristike svakog tipa posebno često se mogu iskoristiti da optimizuju performanse u skladu sa potrebama aplikacije.
SUPROTAN REŽIM
Obično se nazivao „eliktrično oko“ i prva od ovih kategorija je bila uvedena u raznovrsnost aplikacija, nazad u ranim 1950-im, da obuhvati delove brojača, autamtske otvarače vrata, modula i sigurnosnih sistema. Odvojen prenosi prijem elemenata se fizički nalaze na obe strane oblasti interesa; predajnik emituje snop svetlosti; često „vođen (puštan)“ u skorijim konfiguracijama od strane LED-a, koji je usmeren na fotosenzitiv prijemnika (slika 3-25). Svaki predmet koji prolazi između emitora i prijemnika razbija snop, remeteći time kola. Efektivni opsezi stotine metara ili više su rutinski mogući i često se koriste u bezbednosti (bezbednosnim primenama).
Detektor emiter
Slika 3-25.

Konfiguracija senzora suprotnog režima se oslanja na ciljni prolaz (prolaz mete) između emitora i detektora da prekine snop. Osim nekoliko specijalizovanih slučajeva internog registrovanja (kao što su određene vrste optičkih enkodera), senzori suprotnog režima imaju malu primenljivost na mobilne robotske sisteme, zbog njihove geometrijske konfiguracije (tj. Suprotan par prijemnika i prijemnih elemenata).
Retro-refleksivni režim
Retro-refleksivni senzori su evoluirali od raznih senzora suprotnog režima kroz upotrebu ogledala da reflektuje emitovanu energiju nazad do detektora koji se nalazi neposredno pored predajnika. Ugaoni, kockasti retro-reflektori (slika 3-26) su zamenili ogledala da smanje potrebe kritičnih poravnanja. Uglasto-kockaste prizme imaju tri međusobno vertikalno reflektujuće površine i lice hipotenuze; svetlo ulazi kroz lice hipotenuze i reflektuje se na svaku od površina i vraća nazad kroz lice hipotenuze do njenog izvora (Baner, 1993b).
Slika 3-26.
Uglasto-kockasti retroreflektori se koriste da povećaju efektivni opseg i pojednostave poravnanje (uzeto od Banera, 1993b). U većini fabrički automatizovanih scenarija, predmet interesovanja je detektovan tek kada se prekine snop, mada neke aplikacije (primene) zahtevaju postavljanje fotoreflektora na sam predmet. Dobra retorefleksivna meta će se vratiti oko 3000 puta toliko enerije na senzor, koliko bi bilo reflektovano (se odrazilo) na kucaćem belom papiru (Baner, 1993b).
Slika 3-27.
Ranije verzije ove automatizovane korpe za isporuku pošte su se oslanjale na montiran zid retroreflektora (levo od ulaza) da identifikuju stajanja (zastoje) duž putanje; Sada šnji sistem egistruje uzdužne markere na susednom podu (platformi) do vodećeg puta (pomorsko-kontrolna kontrola i nadzorni okeanski centar). Raspoređivanje emitora i detektora je pojednostavilo ugradnju u industrijska scenarija linijskih skupova i otvorilo nekoliko mogućnosti za mobilne sisteme takođe. Jedan zajednički primer se da videti u korišćenju markera fiksnih lokacija za automatizovana vozila.
Slika 3-27.
Prikazuje tipičnu primenu (zajedno sa) Belom i Hovelom i njihovim sistemom za isporuku pošte pri radu NCCOSC. Kružna retrorefleksivna meta montirana na zid susednog ulaza (vrata) u kancelariju se koristio da označi položaj duž trase putovanja gde je platforma trebalo da stane. (Ovaj sistem zapravo registruje uzdužne markere na tlu pored vodećeg/glavnog puta, što će biti razmatrano u poglavlju

11). Indikator ploče upozorava sekretarsko osoblje da deponuju/stave odlaznu poštu u sakupljačku korpu i prikupe bilo kakvu poštu za isporuku u toj stanici.
Difuzni režim
Optički senzori blizine u difuznoj kategoriji radi na sličan način kao i senzori retrorefleksivnog tipa, osim kada se energija vraća sa površine predmeta (interesovanja), umesto kooperativnog reflektora (slika 3-28). Ova odlika olakšava slučajnu detekciju predmeta u restrukturalnim okruženjima.
Slika 3-28.
Difuzni režim senzora blizine se oslanja na energiju reflektovanu direktno od površine mete. Tri Banerov multi-bim CX1-6 srednjeg opsega u blizini infra-crvenih detektora blizine (Baner, 1993a, 1993b) su raspoređeni na ROB ART H u dalekovidnom horizontalnom nizu u cilju izbegavanja sudara. Dve dodatne jedinice (Mini-Bim model SM312D) su montirani na levoj i desnoj strani prednje donje ploče jedinične baze. Ovi senzori modulisanog snopa imaju podesiv maksimum opsega, postavljenih za ovu nameru na oko 30 inča za CX1-6 i 15 inča za SM312D. Senzori blizine obezbeđuju sposobnost proširene zaštite u pravcu putovanja i kolektivno mogu razaznati da li je prepreka tačno ispred, desno ili levo od centralne linije. Postoji nekoliko prednosti senzora ovog tipa preko (nad) ultrazvučnog opsega za detekciju predmeta u blizini. Ne postoji prihvatljivo korišćenje pošto se optička energija širi brzinom svetlosti, gde drugo da može biti potrebno da se ažurira redom izbacujući ultrazvučni niz od samo 12 senzora. Pored toga optička energija može lako da bude usmerena da eliminiše interakciju senzora poravnjanja čime se omogućava da više senzora istovremeno otkazuje (se kvari). Konačno, što su kraće talasne dužine to u većoj meri smanjuju probleme zbog spekularnih refleksija (odraza)/(reflektujućih odraza), što je rezultiralo u efektniju detekciju (otkrivanje) izvan normalnih površina (vidi poglavlja 8 i 9). Mana je, naravno, da nijedno direkto merenje opsega je obezbeđeno i varijacije u refleksiji mete mogu ponekada da stvore neredovne/netačne rezultate. Jedna metoda za rešavanje ovog ograničenja je razmatrana u narednom (sledećem) poglavlju.
Konvergentan režim
Difuzni senzori blizine mogu da koriste posebnu geometriju u konfiguraciji predajnika u odnosu na prijemink, da bi se obezbedilo što preciznije pozicioniranje informacija.Optička osa predajnika LED je pod određenim uglom u odnosu na detektor, tako da se ova dva seku samo u usko definisanoj oblasti, kao što je ilustrovano na slici 3-29. To je samo u ovom u određenom rastojanju od tog uređaja, tako da meta može biti u položaju da odražava energiju nazad ka detektoru. Shodno tome većina meta van ovog opsega nisu otkrivene. Ova funkcija (karakteristika) razdvaja senzor blizine od zavisnosti refleksije na površine mete, (zavisnost o

refleksiji o ciljnoj površini), i korisna je kada mete (ciljevi) nisu dobro raseljeni (pomereni) od pozadine predmeta.
Slika 3-29.
Difuzni senzori blizine koji su konfigurisani u konvergentnom režimu mogu se koristiti da utvrde približno rastojanje do objekta. Senzori konvergentnog režima su korišćeni na ROBART-u II da otkriju diskontinuitete na tlu (platformi), kao što su stepenice, gde su značajne varijacije refleksije na hodnoj površini onemogućile korišćenje difuznih senzora blizine. Bauer SM512DB infra-crveni senzor je instaliran s preda i model SE612 na svaki ugao baze. Senzori su ostavljeni da otkriju normalno pristustvo poda (tla), da spreče pokušaje da pređu neprikladne diskontinuitete koji bi mogli da navedu u nezgodan položaj ili čak oštete uređaj. Bilo kakvi neželjeni uslovi detektovani ovim senzorima izazivaju nagon motora da se odmah iskluči, a kontrolni procesor je upozoren na kom uglu je senzor otkrio problem.Uranim 1980-im, HoneyWell visitronics, Englewood, CO, je razvio interesantni bezkontaktni ispitivač blizine koji koristi konvergentnu tehniku registrovanja za određivanje relativne udaljenosti, kao i prisustvo ili odsustvo predmeta. HVS-300 tozonski senzor udaljenosti (nije više dostupan) bi značio da li je površina mete bila blizu senzora, na srednjoj udaljenosti, daleko od senzora, ili van dometa. Konvencionalni difuzni detektori blizine na osnovu intenziteta povratnog signala prikazuju visoku ponovljivost samo kada se refleksija ciljne površine održava konstantnom. HVS-300 je imao veću tačnost pod razlilčitim uslovima refleksije i osvetljenja ambijenta (prostora) kroz upotrebu trijangulacije šeme opsega. HVS-300 senzor brzine se sastoji od para 820 nanometara infra-crvenih LED izvora, dualnog elementa silicijumskog fotodetektora, usmerene optike i kontrole logike kola. LED diode su emitovale kodirane svetlosne signale pod različitim uglovima kroz jednu stranu usmerenog sočiva (objektiva), kao što je prikazano na slici 3-30. Ako odlazni snop udari predmet, deo reflektovane energije je vraćen kroz drugu stranu sočiva (objektiva) i fokusiran na detektor montaže. Detektor koristi dva elementa fotodiode koji se nalaze jedan pored drugog, i deli ih uski prolaz. U zavisnosti od raspona refleksivne površine, povratna refleksija (odraz) bi pala ili na jedan fotodetektor (ukazujući da je refleksna površina bila blizu senzora) ili na drugi (što znači da je predmet bio na granici između ove dve oblasti). Sa dva odvojeno projektovana prenosa na scenu pod različitim ulovima opsega, stvorene su dve takve granice. Prva je istaknuta između srednje i bliže oblasti, dok je druga istaknuta između srednje i daleke oblasti. Pošto su oba prenosa koristili isti detektor, izvori su bili jedinstveno (unikatno) kodirani kontrolnom elektronikom/ (kontrolna elektronika je unikatno kodirala izvore).
Slika 3-30.

Honeywell HVS-300 senzor blizine je uključio (pripojio, spojio) dualne infra-crvene emitore da se utvrdi da li je predmet bio u podesivoj zoni (Honeywell visitronics Inc.). Generalno, neosetljivi na promene u teksturi površine ili boji i prirodne uslove osvetljenja prostora, HVS-300 se činio odgovarajućim za potrebe izbegavanja sudara zatvorenog mobilnog robota gde je ograničena brzina kretanja napred bila u skladu sa maksimalnim dometom senzora od 30 inča. Pored toga, četiri ograđena mesta (bunkera) prekinutog (izolovanog) dometa bi dali relativni osećaj za udaljenost do pratećeg objekta, dajući nejasno rukovanje/upravljanje. Nažalost, veći jedinični trošak u odnosu na ultrazvučne sisteme dometa i konvencionalni režim detektora blizine je bilo teško opravdati (održati) i kasniji napredak u položaju osetljivih detektora (PSDs) je napravio atraktivnije, konkurentne trijangulacione sisteme dometa (vidi poglavlje 4).
Rangiranje trijangulacija
Jedna od prvih oblasti za zabrinutost u evoluciji dizajna mobilnih robota je potreba da se obezbedi sistem sa dovoljnom situacionom svesti da podrži inteligentan pokret. Prvi korak ka tom cilju se sastoji od sticanja odgovarajućih informacija u vezi opsega i ležajeva na okolnim predmetima, i naknadno tumačenje tih podataka. Senzori blizine predstavljaju prvi korak u tom pravcu, ali sami po sebi su daleko od cilja standarda iz niza ranije već pomenutih razloga, a ne najmanje nemogućnosti kvantifikovanja dometa (raspon). Senzori koji mere stvarnu udaljenost mete interesa (interesnog cilja) bez direktonog fizičkog kontakta mogu biti posmatrani kao bezkontaktni senzori dometa. Postoji najmanje sedam različitih vrsta tehnika dometa, koji se koriste u različitim sprovođenjima (implementacijama) ovakvih uređaja za merenje udaljenosti (Everet, et al, 1992):-Trijangulacija – Interferometrija-Vreme leta (pulsirajući) – radni fokus -Merenje promene faze (CW) – intenzitet povratnog signala-Frekvencijska modulacija (CW)Osim toga postoji znatan broj različitih varijacija na temu nekoliko ovih tehnika, kao npr. U slučaju raspona trijangulacije: -Stereodisparitet – poznata veličina mete (cilja)-Aktivna trijangulacija u jednoj tački – optički protok-Strukturno svetloSpektar bezkontaktnih senzora mogu biti široko klasifikovani ili kao aktivni (zrači neki oblik energije u polje opsega) ili kao pasivni (oslanjajući se na energiju koju emituju različitim predmetima u scenu, pod nadzorom).Najčešće korišćeni termini za ovaj vid su radar (radio,režija i raspon), sonar (zvučna navigacija i raspon), i lidar (pravac svetala i opseg) odnose se na aktivnu metodologiju koja može biti zasnovana na bilo kojoj od nekoliko gore navedenih tehnika. Npr. Radar se obično sprovodi korišćenjem vremena leta, merenja promene faze, ili modulacije frekvencije. Sonar je obično

zasnovan na dometu vremena leta, jer je brzina zvuka dovoljno spora da bi lako bile izmerene sa prilično jeftinom elektronikom. Lidar se generalno odnosi na lasersku šemu, koristeći vreme leta ili merenje promene faze. Za bilo koje tako aktivne (refleksivne) senzore, efektivni opseg detekcije zavisi ne samo od nivoa emitovanja snage (energije), već i od sledećih karakteristika meta (cilja):-Poprečni presek – određuje koliko emitovanja energije pogodi metu-Refleksija – određuje koliko je vezane energije reflektovano nasuprot apsorbciji ili prolazu kroz nju-Direktivnost – određuje kako je reflektovana energija redistribuirana (tj. Rasuta nasuprot fokusirane).Domet trijangulacije je zasnovan na premisi avionske trigonometrije koja navodi datu dužinu strane i dva ugla trougla, moguće je odrediti dužinu ostalih strana i preostalog ugla. Osnovni zakoni sinusa mogu biti preuređeni kao što je prikazano ispod da predstavi dužinu B strane, kao i funkciju A strane i uglove 0 i :U aplikacijama dometa dužina B bi bila željena udaljenost do predmeta interesovanja u tački P3 (slika 4-1) za poznati senzor odvajanja osnovne linije A.
Slika 4-1.
Sistem trijangulacije dometa određuju opseg B do ciljne tačke P3, mereći uglove <|> i 9 na tačkama Pi i P2.Sistemi trijangulacije dometa su klasifikovani ili kao pasivni (koriste samo okolno svetlo scene) ili kao aktivni (koriste izvor energije da osvetle metu). Pasivni stereoskopski sistemi dometa stavljaju u položaj direkcione detektore (video kamere, niz slika čvrstog stanja, ili detektore osetljive na dodir), na odgovarajućim položajima do mesta Pi i P2 (slika 4-2). Oba senzora za snimanje su raspoređeni da vide isti predmet/objekat, P3 formirajući imaginarni (P3) trougao. Merenje uglova 0i je u vezi sa poznatom orijentacijom. Trijangulacija dometa 105 (poglavlje 4). Bočno rastojanje od kamera omogućava izračunavanje dometa do predmeta interesovanja.
Slika 4-2.
Konfiguracija pasivnog stereoskopskog sistema dometa.Aktivni trijangulacioni sistemi, s druge strane položaj kontrolisanog izvora svetla (kao što je laser) u bilo kojoj tački Pi ili P2, usmereni su na tačku posmatranja, P3. Direkcioni senzor za sliku je postavljen na preostala temena trougla i takođe je usmeren na P3. Osvetljenje od izvora će biti reflektovano metom, sa delom vraćene energije koja pada na detektor. Bočni položaj tačke kao što se vidi detektorom, daje kvantitativnu meru nepoznatog ugla ( ] ), dajući određivanje dometa zakonom sinusa. Radne karakteristike trijangulacionih sistema u izvesnoj meri zavise od toga da li je sistem aktivan ili pasivan. Pasivni trijangulacioni sistemi koji koriste konvencionlane video kamere

zahtevaju posebne uslove ambijentalne rasvete koji veštački moraju biti obezbeđeni, ukoliko je okruženje isuviše mračno. Osim toga, ovi sistemi imaju problem koji proizilazi iz teškoće u usklađivanju tački posmatranih kroz samo jedan senzor sa onima posmatranim kroz preostale.Sa druge strane aktivne trijangulacione tehnike koje koriste samo jedan detektor, ne zahtevaju posebnu ambijentalnu rasvetu, niti imaju problem preniske. Aktivni sistemi međutim, mogu naići na sličajeve ne zabeležene obustave spekularne refleksije ili površinsku apsorbciju svetla. Ograničavajući faktori zajednički za sve trijngulacione senzore uključuju smanjenju tačnost sa povećanim dometom, greške ugaonih merenja, kao i problem nestalih delova (takođe poznat kao „senčenje“).Delovi koji nedostaju se odnose na scenario gde se određeni delovi scene mogu posmatrati samo sa jednog mesta promatranja (Pi ili P2). Ova situacija nastaje zbog nagiba udaljenosti između Pi i P2, uzrokujući delimičnu okluzije (zatvorenost) mete (tj. Tačka interesa se vidi u jednom prikazu, u suprotnom je oštećenje ili nije ni prisutna u drugom). Dizajn trijangulacionih sistema mora da sadrži analizu razmene nagiba: Dok osnovna linija merenja raste, tačnost opsega raste, ali problemi detekcione (usmerene) okluzije su pogoršani.
4.1. STEREO DISPARITET
Prva od trijangulacionih šema o kojoj će se raspravljati je streo disparitet (takođe poznat i kao stereo vizija, binokularna vizija (vid) i stereopsija) je pasivna tehnika dometa po ugledu (modelovana) po biološkim podudarnicima. Kada je trodimenzionalni predmet posmatran sa dva mesta na ravni normalnoj u odnosu na smer vizije (posmatranja), slika dok je posmatrana sa jednog mesta je pomerena bočno, nego kada se posmatra sa drugog. Rastojanje (pomeranje) slike, poznato kao disparitet, je obrnuto srazmerna udaljenosti od objekta. Ljudi podsvesno naginju pogled da pronađu predmet interesovanja u njihovom vidokugu (Bart, et al, 1992). Držite prst nekoliko inča od vašeg lica dok fokusirate udaljeni predmet, i možete istovremeno posmatrati dve raseljene slike u istoj oblasti. U ponovnom fokusu na prst, vaše oči se zapravo malo okreći ka unutra, gde njihove odgovarajuće optičke ose konveruju na prstu umesto u beskonačnosti. Većina robotskih implemetacija korsiti par identičnih video kamera (ili jednu kameru sa mogućnošću da se kreće bočno) za generisanje dve različite slike, potrebne za stereoskopski domet. Kamere su obično usmerene pravo napred, pokazujući približno istu scenu, ali (u pojednostavljenim slučajevima) ne poseduju sposobnost da naginju njihov vizir na tačku posmatranja, kao što to mogu ljudske oči. Ovo ograničenje čini postavku kamera nešto kritičnom, zato što stereo domet dostiže opseg samo u oblasti (delu) gde se polja posmatranja preklapaju. U praksi, analiza se vrši u izabranom dometu dispariteta duž Z ose sa obe strane verikalne ravni nultog dispariteta i zove se HOROPTER (slika 4-3). Oblast (deo) izabrane slike (zajedno sa) ovim opsegom dispariteta gde definiše trodimenzionalnu veličinu, zapreminu u prednjem delu vozila, poznatom kao prozor stereo posmatranja (Bart, et al, 1993).

Slika 4-3.
Prozor stereo posmatranja je obim interesa na svakoj strani ravni nultog dispariteta, poznatog kao horopter (Dejvid Sarnof istraživački centar).-Poglavlje 4 domet trijangulacije 107Još nedavno se razvio interes u okviru istraživanja zajednice za dinamičkom orijentacijom kamere (slika 4-4), često se naziva i aktivni vid, u literaturi (Aloimonos, et. al., 1987; Švajn i Striker, 1991; Vevering, et al, 1993). Široka prihvaćenost ove terminologije je možda u nekom pogledu nepovoljna u pogledu potencijalne zabune sa stereoskopskim sistemima, koristeći aktivni izvor rasvete (vidi poglavlje 4.1.3.). Nagibni stereo još jedan naziv u upotrebi je možda prihvatljiviji izvor. Mehaničko naginjanje je definisano kao proces rotiranja jedne ili obe kamere oko vertikalne ose, u cilju postizanja nultog dispariteta u nekoj izabranoj tački na sceni (Bart, et al, 1992).
Slika 4-4.
Ovaj nosač stereoskopske kamere koristi par olovo-vijačnih aktuatora da obezbedi odvijanje osnovne linije i obavezan nagib (tehnologija robotskih sistema, Inc.)Postoje 4 osnovna koraka koji su uključeni u proces stereo dometa/raspona (Pođo,1984):-Tačka u slici jedne kamere mora biti identifikovana (slika 4-5, levo)-Ista tačka mora biti smeštena na slici duge kamere (slika 4-5, desno)-Bočni položaji obe tačke moraju biti izmerene u odnosu na zajedničku referencu.Domet Z se tada izračunava iz dispariteta u bočnim merenjima.Na površini, ova procedura izgleda prilično jednostavno, ali teškoće se javljaju u praksi, kada pokušava da se pronađe određena tačka na drugoj slici (slika 4-5). Uobičajen pristup je da se spoje „tačke interesa“, karakterisane velikim intenzitetom prekida (Konrad i Samson, 1990). Spajanje je komplikovano u delovima gde su intenzitet i/ili boja jednolične (Jarvis, 1983b). Dodatni faktori uključuju prisustvo senki samo na jednoj slici (zbog okluzije) i varijacijama u karakteristikama slike koja može nastati iz prikazivanja okolnih svetlosnih efekata iz različitih uglova. Napor da se dve slike podudare u jednoj tački sezove korespondencija i metode za smanjenje ovih skupih računarskih procedura se široko razmatraju u literaturi (Nitzan, 1981; Jarvis, 1983 a; Pođo, 1984; Lovenštajn, 1984; Vuylsteke, et al, 1990; Wildes, 1991).
Slika 4-5.
Raspon Z potiče od izmerenog dispariteta između interesnih tački u levoj i desnoj slici kamere (David Sarnoff istraživački centar). Verovatno najosnovnije pojednostavljenje korišćeno u rešavanju problema inače ogromnih korespondencija se vidi u epipolarnoj restrikciji (ograničenju) koji smanjuje dvodimenzionalni domen pretrage na jednodimenzionalni

(Vuylsteke, et al, 1990). Epipolarna površina je grubo definisana tačkom Pi položajem levog i desnog sočiva kamere na L i R, kao što je prikazano na slici 4-6.Presek ove ravni sa levom slikom ravni definiše epipolarnu liniju, kao što je prikazano. Kao što se može videti iz dijagrama, pošto tačka P leži u epipolarnoj ravni, njena oslikana tačka Pi mora da „leži“ (bude) negde duž epipolarne linije. Ista logika diktira oslikanu tačku Pr koja mora da leži duž sličnoj, desnoj epipolarnoj liniji u ravni desne slike. Pažljivim usklađivanjem ravni slika kamere, tako da epipolarne linije se podudaraju sa identičnim skeniranim linijama i njihovim odgovarajućim video slikama , pretraga korespondencije u drugoj slici je ograničena istom horizontalom u liniji skeniranja koja sadrži tačku interesa u prvoj slici. Ovaj efekat takođe može biti postignut sa ne-centriranim kamerama pažljivom kalibracijom (baždarenjem) i ispravljanjem, kao što je urađeno u realnom vremenu, pd strane JPL stereo vižn sistema (vidi dole), koisteći Datacube Miniwarper modul.
Slika 4-6.
Epipolarna površina je grubo definisana sočivima centralnih tački L i R, i predmet interesovanja P (uzeto od Vuylsteke, et al, 1990). Da bi se smanjilo opterećenje za obradu slika većina šema za korespondenciju prati ukupnu scenu u relativno niskoj rezoluciji, i ispituje samo odabrane oblasti u više detalja . FOVEAL-na prezentacija, analogno do vida distribucije u ljudskoj viziji se obično koristi kao što je ilustrovano na slici 4-1, pri tom omogućavajući proširenom vidnom polju da prođe bez gubitka rezolucije ili povećanja računarskih troškova (Burt, et al, 1993). FOVEAL-i visoke rezolucije moraju biti pomerene iz okvira na okvir kako bi se ispitale različite oblasti interesovanja, individualno. Oštrina dubine je najveća za male razlike blizu horoptera i brzo padne sa povećanjem te razlike (Burt, et al, 1992).
Slika 4-7.
FOVEAL stereo prikazivanje daje visoku oštrinu u blizini centra vizira, sa smanjenjem rezolucije ka periferiji (istraživački centar David Sarnoff).
4.1.1. JPL STEREO VIZIJA
Jet Propulsion laboratory (JPL), Pasadena, Kalifornija, razvija pasivni sistem stereo vizije za uptrebu na bodu NASA Planetary Rover, i za vojsku SAD-a, primenu drumskih vozila vojske SAD-a (Bedard, et al, 1991a, 1991b, Slack, 1989). 1990 godine JPL je razvio dalekovidni sistem koji je obradio (kompjuterizovao) Laplacian-ovu sliku piramida, koristeći Datacube hardver, praćen metodom stereo podudaranja koji se odnosi na zbir kvadratnih razlika slika operatera do 8 bita Grejeve skale.Prvobitna operacija (radnja) zbira kvadratnih razlika je ozvedena na slici piramide oko 64-60 piksela, koristeći 68020 procesor, opseg proizvodnje i vernost slika u približno 2 sekunde. Naknadne implementacije vrše korelaciju pri mnogo većim brzinama (vidi dole). Alternativna

verzija algoritma uvećava unakrsnu korelaciju sa jednodimenzionalnim modelom glatke površine, omogućavajući umetanje nad nestrukturnim delovima slike. Desparitet procene se vrši nezavisno od svakog skeniranja linije, gde je potrebno približno 6 sekundi za par slike od 64-60 piksela. Ovaj sistem je bio izveden (sproveden) na Planetary Rover Navigation Testbed vozilo (slika 4-8) i pouzdano je obavio navigacijske testove van puta. Oba algoritma pretpostavljaju da su kamere dobro poravnate, ograničavajući pretragu podudaranja sa odgovarajućim linijama skeniranja obe slike.
Slika 4-8.
NASA Planetary Rover navigation testbed ( Jet Propulsion Lab) US Army Tank Automotive Command primenjuje ovu tehnologiju za otkrivanje i izbegavanje refleksivnih prepreka u kontekstu kompjuterski udaljene vožnje HMMWV-a. Procena dispariteta polja na 7.5 okvira u sekundi je postignuto na nivou 64-60 piksela Laplacionove slike poramida, koristeći Datacube MaxVideo-20 platformu i 68040 domaći procesor.Delegacija prepreke se vrši po stopi od 3 ovira u sekundi.
Poglavlje 4 – RASPON TRIANGULACIJE – 111
Sa post- obradom /izradom, triangulacijom i vlo ednostavnim algoritmom za detekciju (otkrivanje) (Matthies, 1992a, 1992b). Ovaj sistem je predstavljen američkoj vojsci Demo/ u Aberdinu MD u Aprilu/Maju 1992 godine. Vozilo je uspešno detektovalo prepreke od oko 50 cm sa strane, u vožnji i od nekoliko km/h po šljunkovitom putu. Nastavnak razvoja sistema je pod „Unmanned Ground Vecihle (UGV) Demo II“ programom, sponzorisan od strane agencije za istraživanje naprednih projekata (ARPA) – Advanced Research Project Agency. U okviru ovog programa potreba za preciznim poravnjanjem/nagibom kamere je eliminisana izvođenjem ponovnog testiranja slike u realno vreme, pre obrade slike piramida, što uveliko pojednostavljuje implementaciju. Sistem je bio korišćen za detekciju prepreka na relativno glatkom terenu, van puta, tokom UGV Demo B u Junu, 1994 godine (slika 4-9); koristeći 128-120 nivo Lapacian-ove piramide. Veća brzina, veća rezolucija i grublji teren su predviđeni za Demo C, u Junu 1995 i Demo II u Junu, 1996 godine.
Slika 4-9.
JPL sistem stereo vizije je bio korišćen da detektuje prepreke za HMMWV baziranih surogat poluautonomnih vozila (surrogate semiautonomous vecihle – SSV) na Demo B u Junu 1994 godine ( Martin Marieta, Denver vazduhoplovstvo).
4.1.2. DEJVID SARNOFOVA STEREO VIZIJA

Konvencionalna primena stereoskopskih dometa za izbegavanje sudara mobilnih robota, generalno podrazumeva stvaranje gustog opsega mape preko odgovarajućeg polja posmatranja, diktiranih veličinom dinamike vozila (poglavlje 1). Mora se obezbediti dovoljna rezolucija da bi se detektovale male opasnosti na udaljenosti od 10 do 20 metara ispred vozila. Sa praktične tačke gledišta, ova kombinacija obrade visoke rezolucije preko polja se smatra računski intenzivnom, rezultirajući malom propusnom moći (niskim cenama propusne moći) i skupog hardvera (Burt, et al, 1993). Istraživačka grupa napredne obrade slika u Dejvid Sarnofovom istražnom centru, u Prinstonu NJ, razvija specijalizovan uređaj za obradu slika, koji se zove vizijski prednji kraj (Vision Front End – VFE). Ovaj namenski hardver radi funkcije pre- obrade slike brže i efikasnije od opšte namene kompjutera, i tako otvara vrata za više praktičnih rešenja, u skladu sa potrebama sistema mobilnog robota. VFE koncept karakterišu 4 inovativne karakteristike: -Obrada Laplacian-ove piramide (Burt i Anderson, 1983; Anderson, et al, 1985)-Elektronski prag/ivičnjak (Burt i Anderson, 1983; Anderson, et al, 1985)-Kontrolisani horopter (Burt i Anderson, 1983; Anderson, et al, 1985)-Stabilizacija slike (Burt i Anandan, 1994; Harisen, et al, 1994).Sarnof VFE pristup oponaša prag/ivičnjak i fovealnu organizaciju atributa ludskog vida kroz elektonsko savijanje i procenu lokalnog dispariteta u strukturi piramide podataka, čime se obezbeđuje odgovarajuća rezolucija tamo gde je potrebno, ali po nižoj ceni. Ovaj pristup se algoritamski postiže kao što sledi (Burt, et al, 1992):-Desna slika je izopačena, da se dovede u sklad sa levom slikom u određenom delu analize-Preostali stereo disparitet između delimično usklađenih slika je tada procenjen.-Globalno raseljavanje (pomeranje) se koristi da se precizira poravnanje-Globalno raseljavanje i polje lokalnog dispariteta prelaze do glavnog kompjutera.
Slika 4-10.
Nakon savijanja desne slike u nagib (ravan) leve, globalno poravnanje (elektronski prag) i procene lokalnog dispariteta se prosleđuju glavnom procesoru vizije (uzeto od Burta, et al, 1992).
POGLAVLJE 4 – DOMET (RASPON) TRIANGULACIJE 113
Mehaničko ivičenje paru stereo kamera rezultira u horopter orijentisan vertikalno u odnosu na sistem optičke ose, kao što je prikazano ranije na slici 3-4. Elektronsko ivičenje je korišćeno od strane VFE da dinamički deformiše slike tako, da je horopter nagnut da obezbedi optimalnu stereo oštrinu za (određenu viziju) zadatka (Burt, et al, 1992). Ovaj horopter konrolisan pristup tako da ide korak dalje od fleksibilnosti interaktivnih mehaničkih ivičenja, u tome što orijentacija horoptera može varirati; pored njene distance odstupanja. Npr., slika 4-11 prikazuje situaciju gde je horopter napravljen paralelno sa osnovom ravni. Kada se koristi foveal sterea u vezi sa tehnikom nagiba horoptera, tada se može postići maksimalna osetljivost na male topogrfske karakteristike, zahvaljujući povećanom grupisanju stereo ćelija visoke rezolucije duž površine

zemlje (Burt, et al, 1993). Sa sposobnošću da se otkriju nisko-ležeće prepreke ili rupe na putu vozilo se potom uveliko poboljšava.
Slika 4-11.
Putem elektronskog savijanja obe slike, ravan nultog dispariteta (horopter), mogu biti slučajnost sa površinom zemlje za poboljšanu oštrinu u delu najvećeg interesovanja (David Sarnoff istraživački centar). Osnovni izazov u korišćenju (upotrebi) bilo kakvog slikovnog sistema za izbegavanje sudara je inherentna smetnja predstavljena/uvedena tuckanjem i klimanjem vozila. Efikasna stabilizacija slike se pokazala kao ključni faktor za uspešno provođenje (implementaciju) na bazi vozila zasnovanih stereo sposobnosti dometa (raspona) (Burt i Anandran, 1994).Mehanički stabilizovana optika je pri korišćenju dala dobre rezultate u vazdušnoj (predajnik, antena) fotografiji i za snimanje sportskih događaja, ali su veoma skupi i prilično glomazni, što ograničava njihovu korisnost iz robotičke perspektive. Tehnike niskog mosta (najnižeg kraja) elektronske stabilizacije su nedavno uvedene u neke potrošačke kamkordere (video kamere) (Uomon, et al, 1990), ali su generalno ograničeni samo na mali broj prevodljivih (translacionih) kompenzacija. Korišćenje procene pokreta na osnovu piramide i elektronskog savijanja, Sarnoff VFE pruža u realnom vremenu uklanjanje deformacija prvog reda između uzastopnih slika tokom vemena mogu staviti poravnate (ispravljene) komponente da proizvode mozaik scene (Hansen, et al, 1994).
4.2. Aktivna triangulacija
Daljinomerenje aktivnom triangulacijom je varijacija na stereo disparitet merenja daljine. Umesto jedne kamere (LED) izvor svetlosti je usmeren na površinu interesnog predmeta. Preostala kamera je kompenzovana (poravnata) od ovog izvora poznatom udaljenošću A i podešenošću da drži osvetljeno mesto u okviru svog vidnog polja (slika 4-12).
Slika 4-12.
Aktivna triangulacija u rasponu konfiguracije koristi običan CCD niz kao detektor. Za jedan ili dva dimenzionalna niza detektora, kao što su vidikon ili CCD kamera, opseg (domet) se može utvrditi iz poznate udaljenosti osnovne linije A, i relativnim položajen tačke lasera slike na sliku ravni. Za mehanički skenirane jedno-elementne detektore kao što su fotoide ili fototranzistori, rotacioni uglovi detektora i/ili izvor, se mere tačnim, instant detektorom u trenutku posmatranja osvetljenog mesta. Trigonometrijski odnosi između ovih uglova i osnovne linije razdvajanja se koriste u teoriji da izračunaju daljinu. Da bi smo dobili trodimenzionalne informacije za zapreminski deo interesovanja, lserski trigonometri mogu biti skenirani i u azimutu, i u uzvišenju. U sistemima gde su izvor i detektor, sami komponente, cela konfiguracija može biti mehanički pomerena, kao što je ilustrovano na slici 4-13. U sistemima sa pokretnom optikom, ogledala i sočiva su uglavnom skenirani u sinhronizaciji, dok laser i detektor ostaju nepokretni.

U praksi stvarnu daljinu osnovne linije razdvajanja A, kao i uglove 0 i $ je teško izmeriti sa preciznošću, i tako većina dizajnera jednostavno kalibrišu sistem dometa testiranim metama postavljenim na poznatim udaljenostima duž Z ose. Nguyen i Blackburn (1995) predstavljaju tipičan postupak islustrovan na slici dole, 4-14.
Linija Up prolazi kroz sočivo žarišne tačke 0 što može biti predstavljeno:y = visina iznad Z oseu = vertikalna projekcija tačke P na ravan slike/ = žižna daljina objektiva, dok je laserski put slično formiran:y – mz + c.
Kombinovanjem ovih jednačina i predstavljanje na kraju daje željeni izraz za opseg Z duž optičke ose kamere (Nguyen & Blackburn, 1995):gde N, d i k su dobijeni na osnovu kalibracionog podešavanja (baždarenja) na sledeći način:
Slika 4-13.
5-milivatni laserski izvor koji se koristi u kombinaciji sa CCD kamerom se montira na 2-DOF ploči i tilt-mehanizma na istraživački prototip ModBot-a (pomorska komandna kontrola i okeanski nadzorni centar). Drugim rečima, kalibracioni ciljevi ili mete su postavljeni na udaljenosti z1 i z2 od kamere, i njihove povezane ravni u i u2 (to jest gde posmatrano lasersko mesto udara u ravan slike), a koji se koriste za izračunavanje d, K i N, umanjujući opšti izraz dometa z, kao funkciju poravnanja piksela u. Bitno je da napomenemo da ovaj pristup kalibraciji ne zahteva niakave informacije o liniji razdvajanja udaljenosti – A, ili žižnoj daljini objektiva - /.
Slika 4-14.
Kalibracione (baždarene) mete su smeštene na poznatim udaljenostima z1 i z2, da izvedu opšti izraz za raspon z, kao funkciju pomeranja slike u (Nguyen i Blackburn, 1995). Nedostaci aktivne triangulacije uključuju situaciju nedostajućih delova, gde su tačke osvetljene izvorom svetlosti koji kamera ne može da registruje i obrnuto (Jarvis, 1983b), kao i površina apsorbcije ili refleksije osvetljujuće energije (vidi poglavlje 9). Međutim sa pozitivne strane, izvorna tačka osvetljenja slike efikasno eliminiše problem korespondencije koji se javio u stereo disparitetu daljinomera. Takođe postoji nezavisnost kontrasta scene, i smanjen uticaj okoline na svetlosne efekte (pozadinsko osvetljenje je efikasan izvor šuma koji mođe da ograniči opseg rezolucije).
4.2.1. Hamamatsu set čipova daljinomera
Blok dijagram za triangulaciju seta čipova daljinomera proizvedenog od strane Hamamatsu korporacije je prikazan na slici 4-15. Ovaj 16-stepeni daljinomer nudi maksimum stope uzorka od 700 Hz i sadrži tri povezane komponente:
- položaj osetljivog detektora (PSD), - IC daljinomer i - LED izvor svetlosti.

Infracrveno zračenje je emitovano LED izvorom i reflektujućom metom nazad do PSD, i kontinuiranog položđaja detektora osvetljenog mesta (zapravo dioda osetljiva na svetlo, kombinovana sa distribuiranim otporom). Mala količina puštene struje ide od centra pa do oba kraja elementa detektora sa distribucijom određenom stopom otiska osvetljenja, odnosom odgovarajućih strujnih tokova, koji se mogu koristiti da odrede lokaciju centroid mesta (Vuylsteke, et. al., 1990). Osetljivi prijemnik kola može da detektuje vibrirajući povratak svetlosti gemerišuće npr. jedan nanoamper izlazne struje u PSD.
Slika 4-15.
Blok dijagram Hamamatsovog seta čipova daljinomera (Hamamatsu korporacija). Hamamatsov daljinomerski čip radi na 3 volta DC i snabdeva i daje i analogni i digitalni izlazni signal. 0,24 do 0,46 volti analogni izlaz je proizveden od testernog i kapacitivnog kola, dok je digitalni izlaz određen integralom A/D konvertora sa 4-bitnom rezolucijom koja odašilja do 16 diskretnih zona dometa (Hamamatsu 1990).
Slika 4-16.
Aktivni sistem triangulativnog dometa se koristi na ROBART-u III i zasniva se na skupu Hamamatsovih čipova (Pomorska kontrolna komanda i Okeanski nadzorni centar).
4.2.2. Daljinomer Draper laboratorije
Tim MIT studenata u Charles Starck-ovoj Draper laboratoriji je nedavno projektovao i izgradio mali (5kg) autonomni mikrorover za istraživanje površine Marsa (Malafeew & Kaliardos, 1994). U tom procesu pojavila se kompaktna potreba za senzorima 118 za mobilne robote kratkog dometa i jeftinog, beskontaktnog daljinomera. Ograničena energija i računarski izvori unutar lutanja diktirali su da potencijalni kandidati rade sa niskim budžetom, i izlaznim signalom koji podrazumeva jednostavan (mali) opsegom izvođenja. Jednostavnost u elektronici je takođe bila poželjna, jer će lutanjem morati proćo kroz razna okruženja u svemiru. Bilo je odlučeno da 180 stepeni azimutnog skeniranja neophodno u pravolinijskom kretanju unapred, ali da skener za (nadmorsku) visinu nije bio neophodan. 5-procentni opseg greške u osvetljenju je smatran prihvatljivim, svojsten navigacijskim greškama povezanim za krajnjim obračunom. Iz ovih uslova aktivna triangulacija daljinomera je razvijena korišćenjem izvora infra-crvenih lasera i jednodimenzionalnih detektora osetljivih na položaj (slika4-17).
Slika 4-17.
Ovaj aktivni triangulacioni opsežni sistem koristi 500-milivatnu lasersku diodu kao aktivni izvor (Charles Stark, Draper laboratorija). Početni prototip koji je konstruisan bio je nešto veći od potrebnog da se pojednostavi montaža i mehanizacija, ali prečnik prijemnog objektiva je namerno održavan malim (15mm), da pokaže sposobnost skupljanja vraćene energije sa odnosom signal-šum. Zbog porasta vremenskih ograničenja, elektronike korišćene na prototipu su obično one od rutinski predloženih za DC rad standardnog kola detektora osetljivosti položaja, pa je ovaj daljinomer po konceptu veoma sličan prethodno opisanom Hamamatsovom sistemu. Signali struje iz detektora su očitavani malo pre i tokom otpuštanja aktivnog izvora, zajednička

metoda za smanjenje pozadinskog šuma. Zbog male brzine vozila nema potrebe za izuzetno brzim sistemom kretanja, stopa od 25Hz uzorka bi trebalo da je dovoljna. Veliki iznos elektronskih šumova je vezan sa ostalim lutajućim sistemima kombinovanim sa malim prečnikom prijemnog objektiva, što je rezultirao teškim otkrivanjem slabih signala, pri tom zahtevajući relativno veliki napon izvora osvetljenja (>250milivati). (Poglavlje 4, triangulacija raspona 119). Izvor je takođe trebao da bude dobro zamagljen, pošto triangulacioni sistemi najbolje rade kada je otisk osvetljenja mali. Da bi zadovoljio ove potrebe, bila je izabrana 920-nanometarska laserska dioda sa divergencijom snopa ispod 15 miliradijansa. Laser daje optički izlazni napon od oko 500 milivati za intervale od 1 milisekunde. Obaj nivo napona nije bezbedan za oko, naravno, ali na Marsu to ne predstavlja problem. Sa podudarnim filterom interferencije, daljinomer je u stanju da radi pod uslovima direktne sunčeve svetlosti. Početni rezultati testa pokazuju tačnost u rasponu koji je oko 5% na maksimalnom dometu od 3 stope. Kao sa bilo kojim sistemom triangulacije, ova normalizovana preciznost se poboljšava kako se opseg smanjuje. Azimutno skeniranje na raporteru je trenutno postignuto servo mehanizacijom cele jedinice daljinomera kroz opseg od 180 stepeni.
4.2.3. Kvantički sistem dometa
Neobičan LED triangulacijski opsežni sistem je razvijen za potrebe američke mornarice, od strane Quantik Industries, Inc. pod programom inovativnih istraživanja malog biznisa (SBIR). (Moser & Everett, 1989). Prototipna jedinica prikazana na slici 4-18 je posebno dizajnirana za upotrebu mobilnih robotičkih platformi po sledećim opštim smernicama:
- Pokrivenost azimuta od 100 stepeni i- 30 stepeni visine- Nepokretni delovi- Realno vreme merenja opsega do 20 stopa- Minimalna potrošnja energije i- Male dimenzije i težina.
Slika 4-18.
Quantik Industries, Inc. su napravili prototip senzora triangulacije dometa (Pomorska komandna kontrola i Okeanski nadzorni centar). Aktivna triangulacija opsega se koristi sa oko 5 stepeni prostornom rezolucijom preko nominalne oblasti u odnosu na 100 stepeni u azimutu i 30 stepeni u (nadmorskoj) visini. Pod tipičnim zatvorenim uslovima, prilično tačne detekcija mete i mere opsega su dobijene na oko 24 stope (7,31m) u mraku, i oko 15 stopa (4,6m) u dnevnim uslovima. Ni jedno mehaničko skeniranje pri tome nije korišćeno i zaštićeni omot može biti pokriven u 0,1 do 1 sekunde, zavisno od potrebne preciznosti.
Slika 4-19.
Blok dijagram kvantičkog sekvancionalnog niza sistema triangulacije opsega. Predajnik se sastoji od 164 visokoenergetska, galijum-aluminijum-arsenik LED-a montiranih u nizu iza sfernih sočiva tako da proizvode odgovorajući broj suženih, ravnomerno raspoređenih snopova, da ispitaju obim interesovanja. LED diode su sekvencionalno aktivirane na određenom nivou ponavljanja, dok sinhroni prijemnik detektuje energiju reflektovanu od meta unutar njegovog

vidnog polja. Samo sočivo LED dioe daje relativno uske snopove, tako da je većina njihovog napona projektovana unutar kritičnog ugla sfere sočiva (objektiva) radi efikasnog prenosa visokog napona. Slika 4-20 prikazuje obrazac snopova i njihovog pozicioniranja iza objektiva za željenh 5 stepeni.
Opšti prijemnik sadrži dve identične jedinice, gde svaka pokriva vidno polje od po 50 stepeni. Ove jedinice sadrže Fresnelovo sočivo, optički filter raspona, detektor osetljiv na položaj i slične elektronske procese koji digitalizuje analogne jedinice. Prijemnik koristi silicijumski bočni efekat fotodetektora osetljivog na položaj za merenje lokacije (u ravni slike) emitovanog svetla reflektovanog od površine mete. Predajnik i prijemnik su vertikalno odvojeni osnovnom linijom od 10 inča (25,4 cm).
Slika 4-20.
Raspored infracrvenih LED zraka iz sfere objektiva u sistemu kvantog raspona. Lokacija centroida reflektovane energije usmerene na detektor osetljiv na položaj, je funkcija određenog zraka koji je aktivan i doseže metu osvetljavajući je. Položaji signala sa detektora (koji proizilaze iz naredne aktivacije LED dioda iz predajnika) su kolektivno obrađeni od strane specijalizovanih mikro računara za određivanje rastojanja do meta, kroz zaštićenu detekciju senzora. Mera azimuta i (nadmorske) visine je funkcija položaja LED-a (u nizu predajnika) aktivnih u vreme detekcije. Nastali pregled je izveden iz kalibracionih podataka i koristi se za obavljanje konverzija položaja dometa i nadoknadu za različitost predajnika.
4.3. Aktivni stereoskopi
Zbog složenosti računarski intenzivnih i drugih povezanih resursa potrebnih za uspostavljanje korespondencije, metode pasivnih stereoskopa su u početku bile ograničene praktičnim dostignućima i to do vrlo jednostavnih scena (Blais, et.al. 1988). Jedan od načina rešavanja ovih problema jeste da se koristi aktivni izvor zajedno sa parom stereo kamera. Ovo aktivno osvetljenje uveliko poboljšava performanse sistema, kada se posmatra scena sa ograničenim kontrastom. Identifikovanje mesta osvetljenja postaje trivijalna stvar, video okvir predstavljajući scenu osvetljenu izvorom je uzet od naknadnog kadra iste slike sa deaktiviranim izvorom svetlosti. Jednostavna granična vrednost (početna tačka) nastale razlike slike brzo izoluje do aktivnog osvetljenja. Ovaj proces se obavlja u brzom nizu za obe kamere i zatim se utvrđuje bočno pomeranje centroida, Takav aktivni stereoskopski sistem posmatranja se u početku koristio na ROBART-u II za svrhe raspona (opsega), (slika4-21). 6-voltni izvor sijalice je bio vibrirajući na senzorima 122 za mobilne robote oko 10 Hz stope, projektujući oštro definisan obrazac u obliku slova „V“ preko preseka ravni kamere sa ciljnom površinom. Odabran je usijan izvor a ne emiter laser-diode zbog jednostavnosti, znatno nižih troškova (u to vreme) i ograničenih zahteva dometa za zatvoreni sistem.
Slika 4-21.
Aktivni stereoskopski opsežni sistem se upotrebljava ROBART II, koristio je par linearnih CCD nizova u vezi sa žarištem struktuiranog izvora svetlosti. Konfiguracija nije prestajala prravu trodimenzionalnu sposobnost da se svaka kamera sastojala od horizontalnog, linearnog (nasuprot

dvodimenzionalnom) CCD niza. (Linearni nizovi su se upotebljavali kako bi zadržali realistične zahteve za obradu slike u odnosu na dostupni 8-obintni računarski hardver na ploči). Dvostruke kamere daju nevertikalnu rezoluciju, ali namešten opseg i (orijentisane) inforamcije na tačke interesa slučajno detektovane u horizontalnoj ravni sa svojim optičkim osama. Ovo ograničenje je bilo postojano sa dvodimenzionalnim, pojednostavljenim svetskim modelom upotrebljavano od strane robota; Predmeti su bili prestavljeni svojom projekcijom na X-Y ravan, visina informacija nije uzeta u obzir. Linearne kamere su povučene iz upotrebe 1987. godine i zamenjene sa jednom dvodimenzionalnom kamerom visoke rezolucije CCD u kombinaciji sa linijski-orijentisanim video digitalizatorom.
4.3.1. HERMIES
Usaglašavanje između izvora i kamera nije od presudnog značaja u aktivnom sistemu stereoskoposkog raspona; ustvari, izvor čak ne mora biti lociran na ploču robota. Npr. Kilough i Hamel (1989) opisuju dve inovativne konfiguracije koristeći spoljašnje izvore za upotrebu sa robotom Hermies IB, napravljenog u državnoj laboratoriji Oak Ridge. Par širokougaonih crnih i belih CCD kamera je montiran na pločni i tilt mehanizam na vrhu robotove glave, kao što je prikazano na slici 4-22.Analogne video izlazne jedinice iz kamera su digitalizovane okvirom grabera u par od 512x384 piksela, sa obradom slike van ploče od strane „Hypercube-a“, sa jednom svedenom rezolucijom od 256x256. Početna primena vidnog sistema je bila da obezbedi kontrolu nad parom robotskih ruku (od Heathkit HERO-1 robota) upotrebljenog na HERMIES-u.
Slika 4-22.
HERMIES IIB koristi aktivni stereo sistem dometa sa spoljašnjim laserskim izvorom koji bi mogao se koristi za osnačavanje predmeta od interesa na video slici (nacionalna laboratorija Oak Ridge). Da bi ostvario ovaj zadatak, infracrveni LED je priložen na kraju ruke HERO-a 1 blizu manipulatora i orijentisan tako da bude vidljiv unutar vidnog polja para stereo kamere. Tada se napravi niz slika svakom kamerom, prvo sa uključenim a potom i isključenim LED-om. OFF prikaz se oduzima od ON prikaza, ostavljajući par različitih slika, gde se svaka razlika sastoji od jedne svetle tačke koja zapravo predstavlja lokaciju LED-a. Centroidi tački su izračunati da bi se precizno utvrdile njihove koordinate u nizovima različitih slika. Opseg vektora do LED-a tada lako može biti izračunat, i zasniva se na bočnom razdvajanju tački kako ih opažaju dve kamere. Ova tehnika utvrđuje stvarnu lokaciju manipulatora u referentnom kadru robota. Eksperimentalni rezultati su pokazali preciznost u 2 inča, sa 0.2 inča ponovljivosti na udaljenosti od oko 2 stope (Kilough i Hamel, 1989). Infracrveni, poluprovodnički laser montiran na udaljenom tronožcu je tada koristio operateru da odredi metu interesa u kadru video slike na jednoj od kamera. Ista tehnika opisana gore je bila ponovljena, samo ovog puta sistem za obradu slika je smenjivao laser na uključen/isključen. Naknadno diferenciranje (senzor 124 za mobilne robote) rada je omogućio izračunavanje opsega vektora do mete, takođe u referentnom kadru robota. Razlika u lokaciji GRIPPER (hvatač) i ciljanog predmeta bi se mogla iskoristiti da deluje i na platformu i na pokret ruke. Proces za obradu slike bi tada naizmenično, u skoro realnom vremenu za „hvatač“ i metu, omogućio HERMIES robotu da se pokrene i nasumično uhvati naznačeni predmet pod kontinuiranom kontrolim zatvorenog kola.

4.3.2. DUAL BLENDE (OTVORI) 3-D DOMETA SENZORA
Neobičnu implementaciju aktivnog stereoskopskog raspona, koja upotrebljava samo jednu kameru, je predstavio Blajs, et al. (1988; 1990), gde je maska sa dva otvora šupljine zamenjena za membranu standardnog sočiva (objektiva) kamere kao što je prikazano na slici dole, 4-23. Pulniksov model TM-540 CCD kamere (512x492 piksela) se koristi kao detektor. Osnovni princip rada za BIRIS (tj. Biiris) sistem su opisali Rioux i Blais (1986). Fokus objektiva je prilagođen tako da locirana tačka na položaju A je u fokusu na A’ u ravni slike detektora; ignorišući masku za trenutak bilo koji putujući zrak iz tačke A kroz objektiv/sočivo će stići do A’ tačke na slici. Pod ovakvim uslovima druga tačka B na većoj udaljenosti z od sočiva će biti snimljena u B’.
Slika 4-23.
Maska dualnog otvora rupe omogućava da aktivni stereoskopski spektar bude realizovan sa jednom CCD kamerom (Blais, et al. 1998). Sa maskom ubačenom ispred objektiva, dva odvojena zraka skoncentrisana u tački B će proći kroz dva otvora i biće preusmerena sočivom do tačke B’ ispred detektora. Ova dva zraka će nastaviti da udaraju CCD niz u tačkama b1 i b2 kao što je naznačeno na slici. Bočno razdvajanje između tački b1 i b2 je direktno proporcionalno rasponu od sočiva/objektiva Z do tačke B. X i Y pomeranje/raseljavanje mesta u CCD nizu u odnosu na njihov centar se može koristiti za izračunavanje pravca vektrora do mete u odnosu na optičke ose objektiva. Veličina ovog vektora je izmeren raspon Z. Projektovanje obrasca vertikalnih traka (umesto jedne tačke svetlosti) do zamišljene linije postavljene između dva otvora na maski, omogućava postizanje više opisa opsega iz jednog video kadra (Riouks i Blais, 1986). Svaka projektovana traka će se pojaviti kao par linija na detektoru. Slično ovome, bočno razdvajanje između parova linije se može koristiti da se izvede vrednost opsega Z. Tačka dometa slike (od 256 do 240) se može dobiti manje od 4.3 sekunde kada projektovana jedna traka; ista slika će biti dobijena za približno jednu sekundu, ukoliko su četiri profila projektovana istovremeno (Blais, et al., 1988). Prekidi prikazanih linija će biti generisani osvetljenim objektima strukturnog obrasca svetlosti. Ova tehnika osvetljenja strukturnog svetla će detaljnije biti opisana u narednom poglavlju.
4.4 STRUKTURNA SVETLOST
Sistemi raspona koji koriste strukturnu svetlost su prerađen slučaj aktivne triangulacije. Obrazac svetlosti (bilo linija, niz mesta ili mrežasti obrazac) je projektovan na površinu predmeta, dok je kamera usmerena na obrazac iz svoje poravnate tačke. Opseg informacija se manifestuje u vidljivoj iskrivljenosti u projektovanom obrascu zbog varijacija u dubini scene. Upotreba ovih specijalnih svetlosnih efekata teži da smanji složenost u izračunavanju i poveća pouzdanost u analizi trodimenzionalnog predmeta (Jarvis, 1983b; Vuylsteke, et al. 1990). Ova tehnika se obično koristi za brzo izvođenje ograničenih količina vizuelnih informacija pokretnih predmeta (Kent, 1985), i samim tim je pogodna aplikacija za izbegavanje sudara. Besl (1988) daje dobar

pregled strukturne svetlosti tehnike osvetljenja, dok Vuylsteke, et al. (1990) klasifikuje različite prijavljene/izveštavane implementacije u skladu sa sledećim karakteristikama:-Broj i tip senzora-Tip optike (tj. Sferna ili cilindrična sočiva, ogledala, blenderi)-Dimenzionalnost osvetljenja (tj. Tačka ili linija)-Prikaz stepena slobode u vezi sa mehanizmom skeniranja (0,1 ili 2)-Da li je navedena skenirana pozicija ili ne (tj. Trenutni parameti skeniranja nisu potrebni ukoliko aranžman suvišnog senzora uključen).Najčešća konfiguracija strukturne svetlosti podrazumeva projektovanje linije svetlosti na scenu, što su prvi uveli P. Will i K. Pennington IBM-ov istraživački štab, Yorktown Heights, NY (Schwartz, nedatirano). Njihov sistem je stvorio ravan svetlosti koja prolazi kroz zamućen, svetleći izvor kroz prorez, čime pšrojektuje liniju preko scene. (Noviji sistemi stvaraju isti efekat, prelaženjem laserskog snopa kroz cilindrični objektiv ili skeniranjem snopa u jednoj dimenziji). Mesto gde linija seče predmet, gledište kamere će pokazati pomeranja u svetlosnoj traci koja su proporcionalna dubi scena. U primeru prikazanom na slici 4-24, što je manje reflektovano osvetljenje koje se javlja na video slici, to je ciljni predmet bliži izvoru lasera. Tačan odnos između pomeranja trake i opssega zavisi od dužine osnovne linije između izvora i detektora.Kao i kod svakog triangulacijskog sistema, kada se povećava pomeranje/raseljavanje osnovne linije, preciznost senzora se povećava, dok se problemi nedostajanja delova pogoršavaju.
Slika 4-24.
Obično konfiguracija struktuirane svetlosti koja je korišćena na robotskim vozilima projektuje horizontalnu liniju osvetljenja na scenu i detektuje sve ciljne refleksije na slici padajućeg CCD niza. Trodimenzionalni opseg inforamcija za celu scenu može biti dobijen na relativno jednostavan način preko prugastih tehnika osvetljenja. Sklapanjem serija blisko razmaknutih kontura, trodimenzionalni opis dela unutar vidnog polja kamere može biti izgrađen. Treća dimenzija je obično dobijena skeniranjem laserske ravni preko scene. U poređenju sa jednom tačkom triangulacije, trakasto osvetljenje obično zahteva manje vremena da digitalizuje površinu, sa manjim brojem pokretnih delova, zbog potrebe za mehaničkim skeniranjem u samo jednom smeru. Mana ovog koncepta je da je domet izvođenja dugotrajan i težak zbog potrebe skladištenja i analiziranja mnogo kadrova.Alternativni pristup struktuirane svetlosti za trodimenzionalne aplikacije uključuje projektovanje pravougaone mreže velikog kontrasta svetlosnih tački ili linija na površini. Varijacije u dubini uzrokuju krivljenje mrežnog obrasca, dajući sredstva za domet izvlačenja. Obim distozije (krivljenja) je utvrđen poređenjem pomerenih traka sa originalno projektovanim obrascima, kao što sledi (LeMoigue i Waxman, 1984):
-Identifikovati tačke preseka na iskrivljenoj mreži slike -Označiti ove tačke preseka po koordinatnom sistemu-Izračunati disparitet između tački preseka i/ili linija dveju traka-Konvertovati pomeranja do dometa informacija
Uporedni proces zahteva korespodenciju između tačaka na slici i originalnog modela, što može prestavljati problem. Korelacijom mrežnih tačaka slike sa projektovanim mrežnim tačkama, ovaj problem se donekle može ublažiti.

Kritični parametri dizajna su debljina linija koje čine mrežu i razmak između njih. Isuviše tanke linije će se prekinuti u ispunjenim/prenatrpanim scenama, izazivajući prekide koji nepovoljno utiču na tačke preseka datog procesa. Deblje linije će proizvoditi manje posmatranu distorziju mreže, rezultirajući u smanjen raspon tačnosti (LeMoigue i Waxman, 1984). Senzorov namenjen domen rada će odrediti gustinu potrebnih tački za adekvatno tumačenje scene i rezolucije.
4.4.1. TRC TRIANGULACIONI SISTEM STROBOSKOP SVETLA
Transitions Research Corporation (TRC), Danbury, CN, je uvela struktuirani svetlosni sistem da otkrije i izmeri položaj predmeta koji leže unutar ili su pored puta njihove HelpMate mobilne platforme (Evans, et al., 1990; King, 1990). TRC sistem (slika 4-25) se sastoji do CCD kamere i dva infracrvena stroba od 700 nanometara. Stroboskopi naizmenično ispaljuju u kratkim ciklusima (3Hz), rezultirajući stopu ažuriranja u 300 milisekundi. Opsežni filter je pričvršćen za kraj kamere, da poboljša prijemni odnos signal-šum, i time umanjuje uticaj buke van infracrvenog spektra. Vršeći oduzimanje neobasjane slike, piksel po piksel, od obasjane slike je istaknut deo scene koji proizilazi iz reflektovane energije.
Slika 4-25.
Blok dijagram TRC sistema za triungalicuju strob-svetlom instaliranog na kompanijinoj HelpMate mobilnoj platformi (Transition Research Corp). Reflektovane ravni svetla su ispravljene preko horizontalnih linija piksela kamere. Približavajući pokretnu platformu objekat se prvo pojavljuje na vrhu vidnog polja a zatim se pomera dole do ravni slike kako se udaljenost smanjuje. Na ovaj način svaki piksel u ravni slike odgovara unapred određenom opsegu i pravcu izvedene kroz jednostavnu triangulaciju. Da bi se osiguralo realno ili pravo vreme izračunavanja, TRC je implemenovao algoritam početne tačke koji koristi svaki šesti piksel na slici 512x480 piksela. Efektivni opseg sistema je od 6 stopa sa rezolucijom od jednog do tri inča i ugaonom rezoslucijom od 2 stepena. Potrošnja energije (uključujući okvir grabera, kamere, AT kompjuter i stroboskope) je oko 40 vati.
Slika 4-26
Prorezi za dva stroboskopa stuktuiranog svetla su vidljivi tačno iznad i ispod logoa kompanije na prednjoj strani ploče TRC HelpMate (zahvaljujući Transition Research Corp.)
4.5. Meta poznate veličine
Stadimetar je ručni instrument koji se koristi za merenje optičkih udaljenosti do predmeta poznate visine, obično između 50 i 200 stopa, pokrivajući obim od 200 do 10.000 jardi. Stadimetar meri ugao koji objekat zatvara i konvetuje ga u opseg očitavanja direkto uzetog iz mikrometarskog bubnja (Dunlop& Shufeldt, 1972). Konačna varijacija metode triangulacije opsega o kojoj će se raspravljati, koristi ovu istu tehniku. Obim ili opseg se računa kroz

jednostavnu trigonometriju. Poznata osnovna linija, umesto da je između dve kamere (ili detektora i izvora svetla) na robotu, sada je sama meta. Koncept je ilustrovan na slici 4-27. Jedino ograničenje (osim poznate veličine mete) je to da meta mora biti normalna u odnosu na optičku osu senzora, koji u slučaju pasivnog sistema može da bude obična CTD kamera. Standardna jednačina sočiva (objektiva) podrazumeva: r = udaljenost od sočiva do posmatranog predmetas = rastojanje od sočiva do ravni slike/ = žižna daljina sočiva
Slika 4-27
Ugao koji zatvara predmet poznate veličine primetno se povećava dok se udaljenost smanjuje tokom kretanja sa pozicije 2 do pozicije 1, i može se koristiti da bi se izveo nepoznati opseg. Sada pretpostavimo da kamera gleda na otvoren prolaz poznate širine A. Ukoliko je A relativno mala širina u odnosu na nepoznatu daljinu r, tada opseg može biti približen formulom (Nitzan, et al., 1986):A = poznata širinaw = opažena širina u ravni slike.Ukoliko je ugao posmatranja predmeta širok (tj., A nije malo u odnosu na r), tada lokalne geometrijske karakteristike bi trebale biti ispitane (Nitzan, et al., 1986).
4.5.1. NAMCO laser net® senzori za laserko skeniranje
Jedna implementacija ovog koncepta u rasponu podrazumeva izvor laserskog skeniranja koji je mehanički povezan sa fotodiodnim detektorom. NAMCO Controls, Mentor, OH, je razvio laser net® senzore za laserko skeniranje (slika 4-28) za primenu na automatski vođenim vozilima AGV u industrijskim sredinama (takođe vidi poglavlje 15).Retrorefleksivna meta poznate širine je smeštena u strateški lociranom položaju za pomoć u navigaciji (Laskowski, 1988). Dok rotirajući laser skenira preko retroreflektora energija se vraća kolociranom detektoru. Dužina luka rotacije tokom koje detekrot registruje reflektovanu energiju je direktno povezan sa rastojanjem do mete: što je bliža meta, to jeveći luk opažanja. Višestruke mete se mogu istovremeno obrađivati, i takođe je moguće identifikovati predmete kroz upotrebu jedinstvenih identifikacionih kodova.
Slika 4-28
Laser net® sistem detektuje retrorefleksivne mete infracrvenim laserom za skeniranje radi prikupljanja pravca i opseg informacija koje se koriste u navigaciji automatski vođenih vozila (NAMCO controls). Poluprovodnička dioda laserskog izvora, fotodetektor, mehanički skener, snopna optika i elekronska kontrola su smešteni u kućištu mereći opseg od 5x6,5x3,4 inča za standardni opseg jedinice 6x9x3,4 inča, za jedinicu dugog dometa. Fotodiodni detektor ima operativni propusni opseg od 1,0 MHz, sačinjen da primi ulaze samo od 670 nanometara dometa spektra. Servokontolisano rotitajuće ogledalo horizontalno prekida laserski snop kroz 90 stepeni vidnog polja (po 45 stepeni sa spoljnih strana centralne linije) brzinom od 20 skeniranja u sekundi. Usmereno ogledalo usmerava snop laserske diode ka skenirajućem ogledalu; sakupljajuće sočivo fokusira povratni signal na fotodetektor. Standardna retrorefleksivna probna

meta koju koristi programer je 4- x 4- inča kvadratne površine, oštrog ugla prizme, sa ukupnim koeficijentom od 90 procenata refleksije. Kada laserski snop prelazi preko ratrorefleksivne mete, povratni signal u ukupnom trajanju je registrovan detektorom. Pošto su sve mete iste veličine, povratak generisan bliskom metom će biti dužeg trajanja u odnosu na one udaljene (slika 4-29). U suštini, bliža meta ima veći odraz. Standardni model Laser net® može da obradi do osam retrorefleksivnih opsega meta istovremeno i/ili informacija o uglu. Opseg se izračunava jednačinom (NAMCO 1989):
Slika 4-29
NAMCO Laser net® sistem određuje i pravac i opseg za standardne veličine retrorefleksivnih meta (NAMCO 1989).S obzirom da su poznate širina mete i ugaona brzina seniranja, jednačina smanjuje do inverzije funkcije trajanja impulsa Ta. Sa 4-inčnim metama efektivni opseg sezora je od 1 do 20 stopa (od 2 do 50 stopa za dalekometni model), a opseg rezolucije za svaki model je 9,6 inča (koristi digitalni izlaz 1.57 inča), na 20 stopa do 0.1 inča (koristi digitalni .017 inča), po jednoj stopi. Laser net® proizvodi analogni izlaz u rasponu od 0 do 10 volti preko opsega od 0 do 20 stopa i inverznu funkciju opsega (koji predstavlja Ta umesto d) digitalnog izlaza na RS 232 serijskog ulaza. Gore navedene kalkulacije indukuju pretpostavku da je meta vertikalno pozicionirana do vrednosti ugla laserskog izvora. Ukoliko ciljana meta rotirana ili nagnuta iz vertikale, rezultirajući pad u preseku će očigledno izazvati grešku u merenju opsega. Da bi se prevazišao ovaj problem, po nekad se koriste cilindrične mete.
4.6. Optički protok
Posmatrano dvodimenzionalno pomeranje osvetljenosti šablona video slike, poznato kao optički protok, predstavlja obećavajuću novu metodu za izbegavanje prepreka. Pretpostavljeni “protok” proizilazi iz relativnog kretanja između kamere koja se kreće i posmatranih predmeta u okruženju, kao što se vidi preko niza slika. Svaki piksel ima povezan vektor trenutne brzine, predstavljajući kretanje slike u tom trenutku. Na primer, slika 4-30 pokazuje polje optičkog protoka koje proizilazi iz translatornog kretanja kamere montirane na vozilo koje se kreće po ravnoj površini. Vektori optičkog protoka iz bižih objekata će imati veće magnitude od vektora iz udaljenih objekata.
Slika 4-30
Polje optičkog protoka zbog prelaska u vertikalni smer u odnosu na optičku osu kamere će pokazati opadanje magnitude protoka sa rastućim opsegom (Gibson 1950, ® Houghton Mifflin Company). Jedna od glavnih prednosti korišćenja optičkog protoka je da odnos između rastojanja i brzine (npr. vreme do sudara) se može lako dobiti i koristiti za iznalaženje manevra za izbegavanje (Young et. al. 1992; Heeger & Jepson 1990a 1990b). Nedostatci se ogledaju u traženom računarskom hardveru: da bi se ostvarili rezultati u realnom vremenu potrebna je moć obrade od 50MHz 80486-ovskog sistema koji troši mnogo energije. Optički protok često ne može biti pronađen od strane lokalnih proračuna piksela slike zbog fenomena poznatog kao

“problem blende”. Međutim, komponenta optičkog protoka u pravcu ugla lokalnog osvetljenja (takođe poznatog kao normalni protok, pošto je pod pravim uglom na ivice osvetljenosti) uvek može biti izračunata lokalno bez velikih poteškoća. Magnituda normalnog protoka vektora je: Mn = normalni protok magnitude vektoraEf = vremenski proizvod svetline pikselaEx = prostorni proizvod duž x oseEy = prostorni proizvod duž y oseKada je kretanje kamere poznato, udaljenosti do tački na sceni mogu biti direktno izračunate iz normalnog protoka, sa najviše tačnih rezultata u tačkama gde je ugao osvetljenja i normalnog protoka najveći (Nguyen 1993). Kada kretanje kamere nije poznato, kretanje kamere i udaljenost do tačaka na sceni mogu biti utvrđene iz optičkog protoka, ali samo do faktora opsega. To znači da je moguće naći odnos između rastojanja do različitih tački na slici, ali ne i njihove apsolutne razdaljine. Ukoliko rastojanje do jedne tačke može biti tačno utvrđeno drugom metodom (kao što je aktivni sonar) tada će biti poznata rastojanja do svih tački. Proračuni su najlakši ukoliko je kretanje kamere čisto translaciono ili čisto rotaciono (Horn, 1986). Interativne i šematske priblišne vrednosti za procenu kretanja kamere i razdaljine od vizuelnog kretanjajoš uvek se aktivno istražuju (Fermuller 1991; Duric 1991).
4.6.1. NIST pasivni radius i izbegavanje sudara
Metoda utvrđivanja protoka korišćena od strane Nacionalnog instituta za standarde i tehnologiju (NIST) olakšava izračunavanje uz pretpostavku da se kamera kreće na poznat način u stacioniranom svetu (Herman & Hong, 1991). Ove pretpostavke dovode do dva zaključka: optičko polje protoka na slici (tj. pravac protoka u svakoj tački) može se predvideti, , kada je jednom optički protok utvrđen, tada vektori protoka lako mogu biti konvertovani u vrednosti dometa. Ovi zaključci su generalno istiniti za proizvoljna kretanja kamere, uključujući i čisto pravolinijsko kretanje, čistu rotaciju, i kombinaciju ta dva. Ptretpostavkom da se polje protoka može predvideti omogućava predračun pravog smera protoka vektora; kako bi iz toga izveli optički protok, samo treba izračunati magnitude protoka vektora. Poznavanje polja protoka takođe omogućava korišćenje referenci lokalne slike (za izvođenje informacija iz toga) koje mogu da rade paralelno u svim tačkama na slici, dodatno smanjujući vreme računanja. Dodatni detalje algoritama su predstavili Lau et. al. (1992) i Liu et. al. (1993).
4.6.2. David Carnoff pasivna vizija
Istraživači David Carnoff–ovog istraživačkog centra su razvili algoritme za utvrđivanje geometrije scene (opsega, 3D orijentacije i oblika) iz pasivno dobijenih binokularnih i pokretnih slika. Merenje udaljenosti izvedeno je iz intenziteta proizvoda dve ili više slika iste scene. Pristup kombinuje ograničenje konstantnosti lokalnog osvetljenja sa ograničenjem globalnog kretanja kamere, kako bi povezao derivate vrednosti lokalnog opsega sa modelom globalne kamere i intenzitetom lokalne slike. Počevši sa početnim procenama kretanja kamere i lokalnog opsega, domet je prerađen korišćenjem modela pokretne kamere kao ograničenja, nakon čega je model prerađen korišćenjem procene lokalnog opsega kao ograničenja. Ovaj postupak procene je ponovljen

nekoliko puta za vreme upoređivanja. Ceo postupak se obavlja u (prostorno) grubo-ka-finom algoritamskom okviru.Demonstracija ove tehnologije je iskoristila komercijalne CCD kamere i okvirni gaber za snimanje slike u kombinaciji sa radnom stanicom da stvaran opseg ponovo stvori u nerealnom vremenu. Ilustracija ( Slika 4-31 levo) pokazuje jednu sliku iz stereo para; svetliji delovi u mapi vraćenog opsega prikazanog na slici 4-31 (desno) predstavljaju delove bliže kamerama. Vrednosti opsega su verodostojne skoro svuda osim na ivicislike i u blizini proširenog fokusa (blizu centra slike).
Slika 4-31.
Jedna od dve slike je prikazana levo, intenzitet piksela u dobijenoj 3-D mapi opsega (desno) je obrnuto proporcionalna sa opsegom (David Sarnoff Research Center). Ograničenja ovog pristupa su dvojaka. Prvo, osnovna formulacija pretpostavlja da je kretanje kamere malo između snimljneih slika i da je intenzitet slike iste tačke između slika konstantan (konstanta osvetljenja); prekoračenjem bilo kog od ovih ograničenja može dovesti do pogrešnih rezultata. Drugo, trenutne procene za implementaciju u realnom vremenu pomoću komercijalno dostupnog hardvera ukazuju da će zahtevana snaga biti približno 60 vati. Dodatne tehničke detalje ove tehnologije su predstavili Hanna (1991) i Wildes (1990a, 1190b, i1991).