Embed Size (px)
Citation preview
FANUC 0系统部分参数功能
FANUC 0系统部分参数功能目录 (其中:0—T或 0—M栏中为 0的表示该类数控机床拥有此项功能,否则不具备次功能) 表 1 SETTING参数 参数号 符号 意义 0—T 0—M 0000 PWE 参数写入 0 0 0000 TVON 代码竖向校验 0 0 0000 ISO EIA/ISO代码 0 0 0000 INCH MDI方式公/英制 0 0 0000 I/O RS—232C口 0 0 0000 SEQ 自动加顺序号 0 0
表 2 RS232C口参数
2/0 STP2 通道 0停止位 0 0 552 通道 0波特率 0 0 12/0 STP2 通道 1停止位 0 0 553 通道 1波特率 0 0 50/0 STP2 通道 2停止位 0 0 250 通道 2波特率 0 0 51/0 STP2 通道 3停止位 0 0 251 通道 3波特率 0 0 55/3 RS42 Remote Buffer 口 RS232/522 0 0 390/7 NODC3 缓冲区满 0 0
表 3 伺服控制轴参数
1/0 SCW 公/英制丝杠 0 0 3/0.1.2.4 ZM 回零方向 0 0 8/2.3.4 ADW 轴名称 0 30/0.4 ADW 轴名称 0 32/2.3 LIN 3,4轴,回转轴/直线轴 0 388/1 ROAX 回转回转轴循环功能 0 388/2 RODRC 绝对指令近距离回转 0 388/3 ROCNT 相对指令规算 0 788 回转轴每转回转角度 0 11/2 ADLN 第 4轴,回转轴/直线轴 0 398/1 ROAX 回转轴循环功能 0 398/2 RODRC 绝对指令近距离回转 0 398/3 ROCNT 相对指令规算 0 788 回转轴每转回转角度 0 860 回转轴每转回转角度
0 0 500—503 INPX,YZ,4 到位宽度 0 0

504—507 SERRX,Y,Z,4 运动时误差极限 0 0 508—511 GRDSX,Y,Z,4 栅格偏移量 0 0 512—515 LPGIN 位置伺服增益 0 0
517 LPGIN 位置伺服增益(各轴增益) 0 0 518—521 RPDFX,Y,X,4 G00速度 0 0 522—525 LINTX,Y,Z,4 直线加/减速时间常数 0
526 THRDT G92时间常数 0 528 THKFL G92X轴的最低速度 0 0 527 FEDMX F的极限值 0 0 529 FEEDT F的时间常数 0 0 530 FEDFL 指数函数加减速时间常数 0 0 533 RPDFL 手动快速成移动倍率的最低值 0 0 534 ZRNFL 回零点的低速 0 0
535—538 BKLX,Y,Z,4 反向间隙 0 0 593—596 STPEX,Y,Z,4 伺服轴停止时的位置误差极限 0 0
393/5 快速倍率为零时机床移动 0 0
表 4 坐标系参数
10/7 APRS 回零点后自动设定坐标系 0 0 2/1 PPD 自动设坐标系相对坐标值清零 0
24/6 CLCL 手动回零后清除局部坐标系 0 28/5 EX10D 坐标系外部偏移时刀偏量的值(×10) 0
708—711 自动设定工件坐标系的坐标值 0 735—728 第二参考点 0 0 780—783 第三参考点 0 0 784—787 第四参考点 0 0
表 5 行程限位
8/6 OTZN Z轴行程限位检查否 0 15/4 LM2 第二行行程限位 0 24/4 INOUT 第三行行程限位 0 57/5 HOT3 超行程—LMX—+LMZ有效 0 65/3 PSOT 回零点前是否检查行程限位 0 0
700—703 各轴正向行程 0 0 704—707 各轴负向行程 0 0
15/2 COTZ 超行程—LMX—+LMZ有效 0 20/4 LM2 第二行行程限位 0 24/4 INOUT 第三行行程限位 0
743—746 第二行行程正向限位 0 747—750 第二行行程反向限位 0 804—806 第三行行程正向限位 0 807—809 第三行行程反向限位 0 770—773 第二行行程正向限位 0 774—777 第二行行程反向限位 0

747—750 第三行行程正向限位 0 751—754 第三行行程反向限位 0 760—763 第四行行程正向限位 0 764—767 第四行行程反向限位 0
表 6 进给与伺服电机参数
1/6 RDRN 空运行时,快速移动指令是否有效 0 0 8/5 ROVE 快速倍率信号 ROV2(G117/7)有效 0
49/6 NPRV 不用位置编码器实现主轴每转进给 0 0 20/5 NCIPS 是不进行到位检查 0 0 4—7 参考计数器容量 0 0 4—7 检测倍比 0 0
21/0.1.2.3 APC 绝对位置编码器 0 0 35/7 ACMR 任意 CMR 0 0
37/0.1.2.3 SPTP 用分离型编码器 0 0 100—103 指令倍比 CMR 0 0
表 7 DI/DO参数
8/7 EILK Z轴/各轴互锁 0 0 9/0.1.2.3 TFIN FIN信号时间 0 0 9/4.5.6.7 TMF M,S,T读信号时间 0 0
12/1 ZILK Z轴/所有轴互锁 0 31/5 ADDCF GR1,GR2,DRN地址 0 252 复位信号扩展时间 0 0
表 8 显示和编辑
1/1 PROD 相对坐标显示是否包括刀补量 0 0 2/1 PPD 自动设坐标系相对坐标清零 0 0
15/1 NWCH 刀具磨损补偿显示W 0 0 18/5 PROAD 绝对坐标系显示是否包括刀补量 0 23/3 CHI 汉字显示 0 0 28/2 DACTF 显示实际速度 0 0
29/0.1 DSP 第 3,4轴位置显示 0 35/3 NDSP 第 4轴位置显示 0 38/3 FLKY 用全键盘 0 0 48/7 SFFDSP 显示软按键 0 0 60/0 DADRDP 诊断画面上显示地址字 0 0 60/2 LDDSPG 显示梯形图 0 0 60/5 显示操作监控画面 0 0 64/0 SETREL 自动设坐标系时相对坐标清零 0 0 77/2 伺服波形显示 0 0 389/0 SRVSET 显示伺服设定画面 0 0 389/1 WKNMDI 显示主轴调整画面 0 0

表 9 编程参数
10/4 PRG9 O9000—O9999号程序保护 0 0 15/7 CPRD 小数点的含义 0 0 28/4 EXTS 外部程序号检索 0 0 29/5 MABS MDI—B中,指令取决于 G90/G91设定 0 389/2 PRG8 O8000—O8999号程序保护 0 0 394/6 WKZRST 自动设工件坐标系时设为 G54 0
表 10 螺距误差补偿
11/0.1 PML 螺补倍率 0 0 712—715 螺补间隔 0 756—759 螺补间隔 0
1000,2000 3000,4000
补偿基准点
0 0
1001-1128 2001-2128 3001-3128 4001-4128
补偿值
0 0
表 11 刀具补偿
1/3 TOC 复位时清除刀长补偿矢量 0 0 1/4 ORC 刀具补偿值(半径/直径输入) 0 8/6 NOFC 刀补量计数器输入 0
10/5 DOFSI 刀偏量直接输入 0 13/1 GOFU2 几何补偿号(由刀补号或刀号)指定 0 13/2 GMOFS 加几何补偿值(运动/变坐标) 0 14/0 T2D T代码位数 0 14/1 GMCL 复位时是否清几何补偿值 0 14/5 WIGA 刀补量的限制 0 15/4 MORB 直接输入刀补测量值的按钮 0 24/6 QNI 刀补测量 B时补偿号的选择 0 75/3 WNPT 刀尖补偿号的指定(在几何还是在磨损中) 0 122 刀补偿量 B时的补偿号 0 728 最大的刀具磨损补偿增量值 0 729 最大的刀具磨损补偿值 0 78/0 NOINOW 用MDI键输入磨损补偿量 0 0 78/1 NOINOG 用MDI键输入几何补偿量 0 0 78/2 NOINMV 用MDI键输入宏程序变量 0 0 78/3 NOINMZ 用MDI键输入工件坐标偏移量 0 0
393/2 MKNMDI 在自动方式的停止时,用 MDI 键输入工件坐标
偏移量 0 0
表 12 主轴参数
13/5 ORCM 定向时,S模拟输出的极性

13/6.7 TCW,CWM S模拟M03,M04的方向 0 0 14/2 主轴转速显示 0 0 24/2 SCTO 是否检查 SAR(G120/4) 0 0 49/0 EVSF SF的输出 0 0 71/0 ISRLPC 串行主轴时编码器信号的接法 0 71/4 SRL2SP 用 1或 2个串行主轴 0 71/7 FSRSP 是否用串行主轴 0
108 G96 或换档(#3/5:GST=1)或模拟主轴定向
(SOR:G120/5:M=1)速度 0 0
110 检查 SAR(G120/4)的延时时间 0 516 模拟主轴的增益(G96) 0 539 模拟主轴电动机的偏移补偿电压(G96) 0 551 G96的主轴最高转速 0 556 G96的主轴最高转速 0
540—543 各档主轴的最高转速 0 3/5 GST 用 SOR(G120/5)定向/换档 0
14/0 SCTA 加工启动时检查 SAR信号 0 20/7 SFOUT 换档时输出 SF 0 29/4 FSOB G96时输出 SF 0 35/6 LGCM 各档最高速的参数号 0
539,541,555 各档的主轴最高转速 0 542 主轴最高转速 0 543 主轴最低转速 0
585,586 主轴换档速度(B型) 0 577 模拟主轴电动机的偏移补偿电压 0
6519/7 主轴电动机初始化 0 0 6633 主轴电动机代码 0 0
6501/2 POSC2 用位置编码器 0 0
6501/5-7 CAXIS1—3 用高分辩率编码器 0 0 6503/0 PCMGSL 定向方法(编码器/磁传感器) 0 0 6501/1 PCCNCT 内装传感器 0 0
6501/4.6.7 位置编码器信号 0 0 6504/1 HRPC 高分辩率编码器 0 0
表 13 其它
24/0 JGNPMC 用 PMC 0 0 71/6 DPCRAM 显示 PMC操作菜单 0 0 123 图形显示的绘图坐标系 0

参数功能
0001 7 6 5 4 3 2 1 0
ADFT RDRN DECI ORC TOC DCS PROD DCS
ADFT 1:进行自动漂移补偿。
0:不进行自动漂移补偿。
RDRN 1:快移时空运转有效。
0:快移时空运转无效。
DECI 1:返回参考点时,减速信号为“1”时开始减速。
0:返回参考点时,减速信号为“0”时开始减速。
ORC 1:偏置量用直径表示。
0:偏置量用半径表示。
IOF 1:偏置量绝对值输入。
0:偏置量增量值输入。
TOC 1:偏置可补复置键取消。
0:偏置不补复置键取消。
DCS 1:按MDI面板上的 START键可直接启动 CNC而不必经过机床侧(仅MDI状态)。
0:按MDI面板上的 START键向机床侧发信号,当机床侧启动信号返回时,CNC才启动。
PROD 1:坐标值显示的是编程的位置。
0:坐标值显示的是加上偏置值的实际位置。
SCW 1:最小指令值为英制(机床为英制)
0:最小指令值为米制(机床为米制)
0002 7 6 5 4 3 2 1 0 NFED TFHD HSLE ASR33 PPD STP2
NFED 1: 使用阅读/穿孔输出程序时,不输出前后的引导部分。(使用 FANUC磁泡盒时设为“1”)
0:使用阅读/穿孔输出程序时,输出前后的引导部分。(设定参数 I/O为“0”时有效)。
TFHD 1:TEACHIN (JOG)状态下,手摇脉冲发生器有效。
0:TEACHIN JOG (JOG示教)状态下,手摇脉冲发生器无效。
HSLE 1: 使用两个手摇脉冲发生器时,轴选择信号有效。
(在轴选择信号关断时,手摇脉搏冲发生器不起作用)

0:使用两个手摇脉冲发生器时,轴选择信号无效。
(与轴选择信号无关,旋转手摇脉冲发生器,轴即移动)
注:有一个手摇脉冲发生时,引参数设为“0”。
(※此项功能在 OT—Mate 中无效)
ASR33 1:阅读/穿孔接口为 20mA电流环接口。
0:阅读/穿孔接口用于 FANUC PPR,FANUC磁包盒或便携式纸阅读机。(设定参数 I/O“0”时有效)
PPD 1:坐标系设定时,相对坐标值亦被预置。
0:坐标系设定时,相对坐标值不被预置。
STP2 1:阅读/穿孔接口的停止位由此 2位设定。
0:阅读/穿孔接口的停止位由此 1位设定。
(设定参数 I/O “0”时有效)
注:波特率由参数 NO.0522设定。
0004 DMRX GRDX
0006 DMR3 GRD3
0005 DMRZ GRDZ
0007 DMR4 GRD4
(※0006,0007号参数在 OT—Mate中无效)
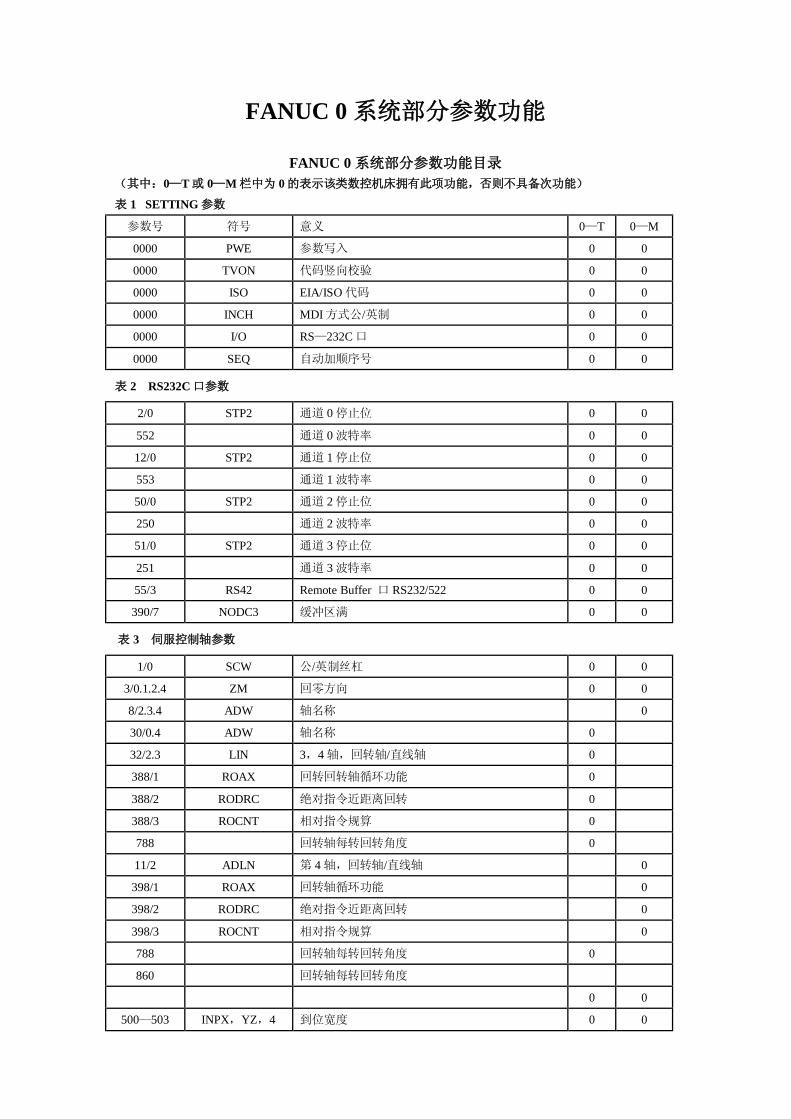
KMRX~DMR4:检测倍率设定,见附表 2。
附表 2 检测倍率
检测倍率 检测倍率 设定码 654
模拟伺服 数字伺服 设定码
654 模拟伺服 数字伺服 000 001 010 011
1/2 1 1 2
1/2 1
3/2 2
100 101 110 111
3/2 3 2 4
5/2 3
7/2 4
GRDX~GRD4:参考计数器容量,见附表 3。
附表 3 参考计数器的容量
参考计数器的容量 设定码
3210 模拟伺服 不用 0.1μm检测器的数字
伺服 用 0.1μm检测器的数字伺服
0000 1000 10000 0001 2000 2000 20000 0010 3000 3000 30000 0011 4000 4000 40000 0100 5000 5000 50000 0101 6000 6000 60000 0110 7000 70000 0111 8000 8000 80000 1000 9000 90000 1001 10000 10000 100000 1010 11000 110000 1011 12000 120000 1100 13000 130000 1101 14000 140000 1110 15000 150000 1111 16000 160000
DMR、CMR、GRD的关系见附表 4。
附表 4 DMR、CMR、GRD的关系
检测倍率(DMR) 电动机(脉冲
编码器)每转
移动量
轴
名
计数单
位(检测
单位)/μm
指令倍率
(CMR) 2000脉冲
2500脉冲
3000脉冲
参考计数器
的容量
X 1 1/0.5 4 10000 10mm Z 1 1 4 10000 X 1 1/0.5 4 8000
米
制
8mm Z 1 1 4 8000

X 1/0.5 1 3 2/4 6000 6mm
Z 1 1 3 2 6000 X 1/0.5 1 2/4 5000/10000
5mm Z 1 1 2 5000 X 1/0.5 1 1/2 2000/4000 英
制 0.2in
Z 1 1 1 2000
0008 7 6 5 4 3 2 1 0 EILK NOFC ROVE MFPR
NOFC 1:不使用偏置计数器。
0:使用偏置计数器。
ROVE 1:快移修调信号 ROV2无效。(100%,F0)
0:快移修调信号 ROV2有效。(100%,50%,25%,F0)
MFPR 1:手动同步进给有效。
0:手动同步进给无效。
0009 TMF TFIN
TMF:由发出M、S、T码到发出MF、SF、TF信号的时间。
TFIN:接收 FIN信号的时间宽度。
设定范围:16~256ms (以 16ms为单位)。
TMF、TFIN与参数设定见附表 5。
附表 5 TMF、TFIN与参数设定
TMF TFIN 参数设定 16ms 16ms以上 0 0 0 0 32ms 32ms以上 0 0 0 1 48ms 48ms以上 0 0 1 0 64ms 64ms以上 0 0 1 1 80ms 80ms以上 0 1 0 0 96ms 96ms以上 0 1 0 1
112ms 112ms以上 0 1 1 0 128ms 128ms以上 0 1 1 1 144ms 144ms以上 1 0 0 0 160ms 160ms以上 1 0 0 1 176ms 176ms以上 1 0 1 0 192ms 192ms以上 1 0 1 1 208ms 208ms以上 1 1 0 0

224ms 224ms以上 1 1 0 1 240ms 240ms以上 1 1 1 0 256ms 256ms以上 1 1 1 1
0010 7 6 5 4 3 2 1 0 APRS WSFT DOFSI PRG9 OFFVY EBCL ISOT
APRS 1:手动返回参考点,自动坐标系被设定。
0:不进行自动坐标系的设定。
WSFT 1:向存储器内设定了工件偏移值时,工件坐标系亦偏移。
0:不进行工件坐标系的偏移。
DOFSI 1:可进行刀具位置补偿量的直接输入。
0:不进行刀具位置补偿量的直接输入。
PRG9 1:程序号为 9000~9999的子程序被保护,不能进行以下编辑操作:
① 程序的清除。即使消除所有程序,9000号以后的程序仍被保留。
② 程序的穿孔输出。即使所有的程序都穿孔输出,9000号以后的程序也不穿孔输出。
③ 程序号的检索。
④ 程序存储后的编辑。
⑤ 程序的存储。程序不能通过MDI方式和纸带存入。
⑥ 程序的比较。
0:程序号为 9000~9999的子程序能被编辑。
OFFVY 1:即使 VRDY信号先于 PRDY信号输出,亦无伺服报警。
0:如果 VRDY信号先于 PRDY信号输出,出现伺服报警。
EBCL 1:显示内存中的程序时,EOB码用“*”表示。
0:显示内存中的程序时,EOB码用“;”表示。
ISOT 1:通电后,即使不返回参考点,快移亦有效。
0:通电后,即使不返回参考点,快移才有效。
0011 7 6 5 4 3 2 1 0 MCINP G01 SBKM PML2 PML1
MCINP 1:通过数据输入外部启动信号(MINP)向存储器输入程序。
0:不通过数据输入外部启动信号(MINP)向存储器输入程序。

G01 1:通电后为 G01方式。
0:通电后为 G00方式。
SBKM 1:可以通过宏程序的单段跳步指令,使机床停止加工。
0:不能通过宏程序的单段跳步指令,使机床停止加工。(通常设为“0”)
PML2,PML1 1:螺距误差补偿倍率见附表 6。设定的补偿量乘以此倍率后输出。(所有轴通用)
附表 6 螺距误差补偿倍率
NFED 1:使用阅读/穿孔接口输出程序时,不输出前后的引导部分。 (使用 FANUC磁泡盒时设为“1”)
0:使用阅读/穿孔接口输出程序时,输出前后的引导部分。 (设定 I/O参数为“1”时有效)
注:波特率由参数 0533设定。
ASR33 1:阅读/穿孔接口使用 20mA电流环接口。
0:阅读/穿孔接口用于 FANUC PPR,FANCUC磁泡盒 或便携式纸带阅读机。(设定 I/O参数为“1”
时有效)
STP2 1:阅读/穿孔接口的停止位 2位。
0:阅读/穿孔接口的停止位 1位。
0013 7 6 5 4 3 2 1 0 TCW CWM ORCW INHMN GOFC GMOFS GOFU2 JHD
TCW、CWM:S模拟输出时输出符号,见附表 7。
附表 7 S模拟输出时的输出符号
PML2 PML1 倍率 0 0 ×1 0 1 ×2 1 0 ×4 1 1 ×8
0012 7 6 5 4 3 2 1 0 NFED ASR33 ZILK STP2
TCW CWM 输 出 的 符 号 0 0 M03,M04均为正输出 0 1 M03,M04均为负输出 1 0 M03为正输出,M04为负输出 1 1 M03为负输出,M04为正输出

ORCW 1:定向停车时 S模拟输出 为负值。
0:定向停车时 S模拟输出 为正值。
INHMN 1:带有菜单编辑功能时, 不显示菜单。
0:带有菜单编辑功能时,显示菜单。
(※此项功能在 OT—Mate中无效)
GOFC 1:指令刀补号为 0时,刀具形状补偿也被取消。
0:指令刀补号为 0时,刀具形状补偿不被取消。
GMOFS 1:刀具形状补偿用矢量处理,即随着刀具的移动进行。
0:刀具形状补偿通过坐标系的偏移进行补偿。
GOFU2 1:刀具形状补偿号 T代码的上二位指定。
0:刀具形状补偿号 T代码的下二位指定。
JHD 1:JOG方式下手摇脉冲发生器有效。
0:JOG方式下手摇脉冲发生器无效。
0014 7 6 5 4 3 2 1 0
T2T4 WIGA OFSB STDP GMCL T2D
T2T4 1:T代码用二位数指定时,被认为是高二位与低二位相同的四位数。
0:T代码用二位数指定时,被认为是高二位为“00”的四位数。(仅在 T2D=0时有效)
WIGA 1:刀具磨损补偿量的设定限制为增量输入,而刀具形状补偿的设定只能是绝对值输入。
0:刀具磨损补偿量与刀具形状补偿量均可共用增量输入和绝对值输入。
(※此项功能在 OT—Mate中无效)
OFSB 1:刀具补偿与轴移动一起进行。
0:刀具补偿在 T代码的程序段中进行。
(用坐标系偏移进行的刀具形状补偿与本参数无关,在 T代码的程序段中进行补偿)
STDP 1:可以显示主轴实际转数和 T代码。
0:不可以显示主轴实际转数和 T代码。
GMCL 1:通过复置键可以消除刀具形状补偿矢量。
0:通过复置键不能消除刀具形状补偿矢量。
(※此项功能仅 0—TC才有)
T2D 1:用二位数指令 T代码。
0:用四位数指令 T代码。

0015 7 6 5 4 3 2 1 0
CPRD REP PRWD MORB SKPF COTZ NWCH CBLNK
CPRD 1:可以使用小数点的地址中省略了小数点时,以 mm,inch,s为单位。
0:可以使用小数点的地址中省略了小数点时,为最小设定单位。
REP 1:由阅读/穿孔接口输入程序时,存储器内已经有相同的程序号时不报警,而由新输入的程序置换。
0:由阅读/穿孔接口输入程序时,存储器内已经有相同的程序号时报警。 PRWD 1:用便携式纸带
阅读器时,有倒带信号输出。
0:用便携式纸带阅读器时,没有倒带信号输出。
MORB 1:刀具位置补偿量、工件坐标系偏移量的测量直接输入时,选择如下方式:设置 RECORD 键、削
测定面,按住 RECORD键后两轴共同回退。(需要 FANUC PMCMODEL L或M)
0:选择没有 RECORD键的方式。
SKPF 1:在 G31跳过功能中,空运转、速度修调、自动加减速有效。
0:在 G31跳过功能中,空运转、速度修调、自动加减速无效。
(※此项功能仅 0—TC才有)
COTZ 1:超程极限信号(*LZ)有效。
0:超程极限信号(*LZ)无效。
(※此项功能仅 0TC才有)
NWCH 1:刀具磨损/形状补偿量显示量,不显示各号码左边的“W”字符。
0:刀具磨损/形状补偿量显示量,显示各号码左边的“W”字符。
CBLNK 1:光标不闪烁。
0:光标闪烁。
0016 7 6 5 4 3 2 1 0
MDEC SPAG NPRD RSTMB RSTMA
MDEC 1:M码用译码信号输出。
0:M码用二位 BCD码输出。
SPAG 1:在直接用角度绘图编程时,设定的角度以补充角度给出。
0:设定的角度以正常角度给出。
(※此项功能仅 0TC才有)
NPRD 1:不使用小数点输入及显示。

0:使用小数点输入及显示。
RSTMB 1:B组的M译码信号(M21A、M22A)可以被复置清除。
0:B组的M译码信号不能被复置清除。
RSTMA 1:A组的M译码(M11A~M22A)可以被复置清除。
0:A组的M译码不能被复置清除。
0017 7 6 5 4 3 2 1 0
OPG7 OPG6 OPG5 OPG4 OPG3 OPG2 OPG1
OPG7 1:软件操作面板上进给保持有效。
0:软件操作面板上进给保持无效。
OPG6 1:软件操作面板上程序保护开关有效。
0:软件操作面板上程序保护开关无效。
OPG5 1:选择程序段跳过、单段、机床锁住和空运转可以通过软件操作面板上的键执行。
0:选择程序段跳过、单段、机床锁住和空运转不能通过软件操作面板上的键执行。
OPG4 1:点动进给倍率修调和快移速度修调可以通过软件操作面板上的键执行。
0:点动进给倍率修调和快移速度修调不能通过软件操作面板上的键执行。
OPG3 1:手摇脉冲发生器的轴选择(HX、HZ)和倍率(×10,×100)开关可以通过软件操作面板上的键
执行。
0:手摇脉冲发生器的轴选择(HX、HZ)和倍率(×10,×100)开关不能通过软件操作面板上的键执
行。
OPG2 1:点动进给轴选择和点动快移按钮可以通过软件操作面板上的键执行。
0:点动进给轴选择和点动快移按钮不能通过软件操作面板上的键执行。
OPG1 1:方式(MD1~MD4、ZRN)可以通过软件操作面板上的键进行。
0:方式(MD1~MD4、ZRN)不能通过软件操作面板上的键进行。
0018 7 6 5 4 3 2 1 0
EDITB TVC PROAD
EDITB 1:标准键盘上的编辑通过操作 B实现。
0:编辑操作按标准规定进行。
TVC 1:纸带进行 TV校验。

0:纸带不进行 TV校验。
(※此项功能仅 0—TC才有)
0019 7 6 5 4 3 2 1 0
DBCD NEOP M02NR DCZ XRC DC4 DC3
DBCD 1:在诊断显示中,计时器和计数器的数据用十进制表示。
0:在诊断显示中,计时器和计数器的数据用二进制表示。
NEOP 1:M02、M30、M99指令表示零件程序结束。
0:M02、M30、M99指令不表示零件程序结束。
(※此项功能仅 0—TC才有)
M02NR 1:执行M02后程序返回到程序开始处。
0:执行M02后程序不返回到程序开始处。
(※此项功能仅 0—TC才有)
DCZ 1:Z轴直径编程。(无效)
0:Z轴半径编程。
(※此项功能仅 0—TC才有)
XRC 1:X轴半径编程。
0:X轴直径编程。
(※此项功能仅 0—TC才有)
DC4 1:第四轴直径编程。(无效)
0:第四轴半径编程。
(※此项功能仅 0—TC才有)
DC3 1:第三轴直径编程。(无效)
0:第三轴半径编程。
(※此项功能仅 0—TC才有)
0020 7 6 5 4 3 2 1 0
NCIPS LM2
NCIPS 1:减速时,在速度为“0”后,控制机才进行下一段,但控制机不能保证机床的位置符合指定的位
置(无位置检测)。
0:在速度为“0”后,控制机才进行下一段,并保证机床达到指定的位置(有位置检测)。

LM2 1:行程极限 2的开关信号有效。(G129.6)
0:行程极限 2的开关信号无效。(G129.6)
(※此项功能仅 0—TC才有)
0021 7 6 5 4 3 2 1 0
APC8 APC7 APC4 APCZ APCX
APCX~APC8 1:选用绝对值脉冲编码器。
0:不选用绝对值脉冲编码器。
0022 7 6 5 4 3 2 1 0
ABS8 ABS7 ABS4 ABSZ ABSX
ABSX~ABS8 1:已建立绝对值脉冲编码器的参考点位置。
0:未建立绝对值脉冲编码器的参考点位置。
(若进行了手动返回参考点,则自动变为“1”之后,不更换检测器时不可改变)
第一次调试及更换检测器时必须设为“0”,电源 OFF/ON后,进行手动返回参考点操作。
0023 7 6 5 4 3 2 1 0
DSON DHNG DITA DCHI DFRN DGRM DJPN
DSON CRT画面为西班牙语显示。
(※此项功能仅 0—TC才有)
DHNG CRT画面为朝鲜语显示。
(※此项功能仅 0—TC才有)
DITA CRT画面为意大利语显示。
(※此项功能仅 0—TC才有)
DCHI CRT画面为汉语显示。
DFRN CRT画面为法语显示。
DGRM CRT画面为德语显示。
DJPN CRT画面为日本语显示。

0024 7 6 5 4 3 2 1 0
EDILK QNI NEGWSF INOUT GNSR SCTO IGNPMC
EDILK 1:每个轴方向的闭锁信号都有效。
0:每个轴方向的闭锁信号都无效。
QNI 1:刀具补偿定写入方式中进行刀补号的自动选择。
0:刀具补偿定写入方式中不进行刀补号的自动选择。
NEGWSF 1:工件偏移量用增量输入时,转换符号后送入存储器。
0:工件偏移量用增量输入时,不转换符号送入存储器。
INOUT 1:第二存储器行程极限的外侧为禁区。
0:第二存储器行程极限的内侧为禁区。
(※此项功能在 OT—Mate中无效)
GNSR 1:绘画功能中,描绘的程序中的位置。
0:绘画功能中,描绘的是加入刀尖半径补偿的实际位置。
(※此项功能在 OT—Mate中无效)
SCTO 1:检测主轴速度到达信号。
0:不检测主轴速度到达信号。
IGNPMC1:通过 PMC的控制无效(与不带 PMC相同)。
0:通过 PMC的控制有效。
0028 7 6 5 4 3 2 1 0
PNOSMP RFST EXTS MMDL DACTF PRCMSG PRCPOS
PNOSMP 1:搜寻主轴平均速度时,采样周期为一倍。
0:搜寻主轴平均速度时,采样周期为四倍。(通常设:0)。
(※此项功能仅 0—TC才有)
RFST 1:在工件坐标系偏移时,MX用半径输入。
0:在工件坐标系偏移时,MX用直径输入。
(※此项功能仅 0—TC才有)
EXTS 1:通过外部程序号检索功能检索程序(01~09999)。
0:通过外部工件号检索功能检索程序(01~015)。
MMDL 1:方式状态在MDI操作 B里显示。

0:方式状态不在MDI操作 B里显示。
(※此项功能仅 0—TC才有)
DACTF 1:现行位置显示页面和程序检查页面均显示实际速度。
0:现行位置页面和程序检查页面不显示实际速度。
(※此项功能仅 0—TC才有)
PRCMSG 1:程序检查页面显示 PMC来的信息。(不提供)
0:程序检查页面显示剩余移动量。
PRCPOS 1:程序检查页面显示绝对坐标。
0:程序检查页面显示相对坐标。
0029 7 6 5 4 3 2 1 0
DSPSUB MABS ADRC DSP4 DSP3
DSPSUB 1:显示 PMC轴的第五/六轴的现行位置。
0:不显示 PMC轴的第五/六轴的现行位置。
轴名与参数(7130,7131)一致。
(※此项功能仅 0—TC才有)
ADRC 1:倒角、拐角 R中的地址不是“C”,而中“I”或“K”。
此外,图样尺寸直接输入中的地址使用事逗号的“,C:和”,B:。
0:倒角、拐角 R和图样尺寸直接输入中的地址使用标准规格的“C”和“R”(第三轴不能使用地址“C”)。
DSP4 、DSP3 顺序为第三、第四轴的现行位置显示。
1:显示现行位置。
0:不显示现行位置。
(※此项功能在 OT—Mate中无效)
0030 7 6 5 4 3 2 1 0
G91 ADW40 ADW30
G91 1:通电后为 G91状态。
0:通电后为 G90状态。
(※此项功能仅 0—TC才有)
ADW40和 ADW30 顺序为第三、第四轴名称的指定。
1:名称为 C并且 Y轴控制有效。
0:名称为 B。
(※此项功能在 OT—Mate中无效)
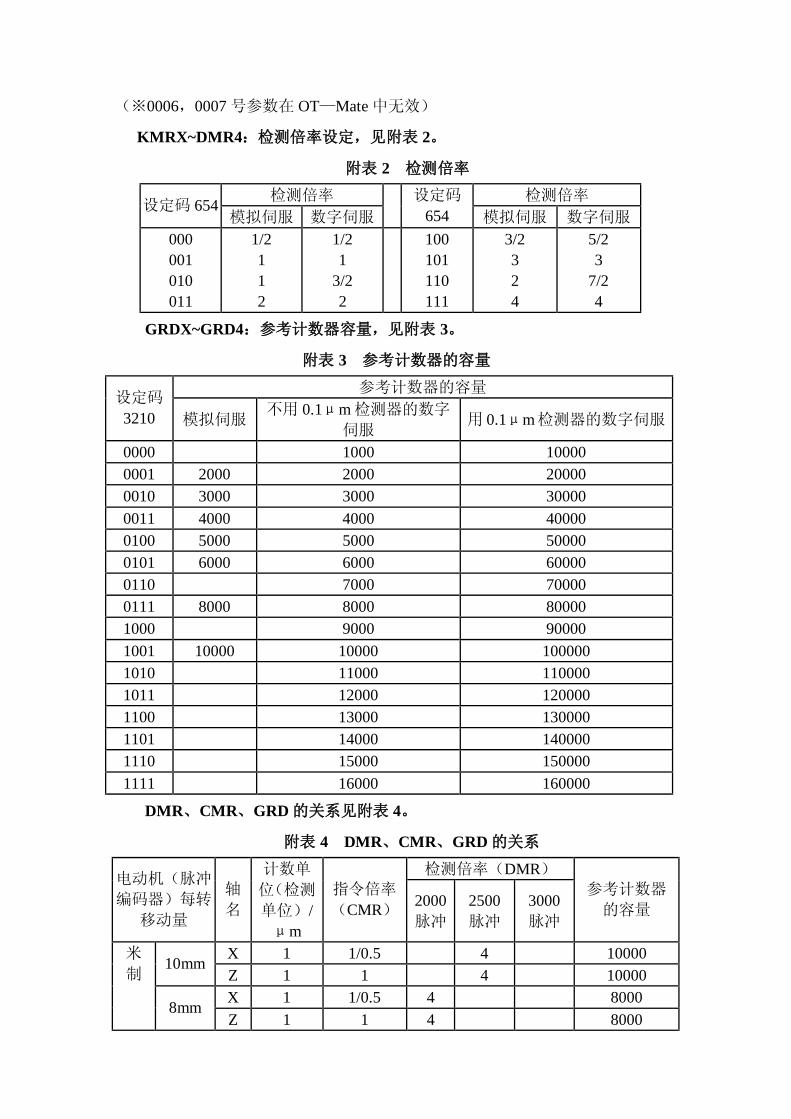
0031 7 6 5 4 3 2 1 0
CNRST ESFC ADDCF RTCT ILVL TAPM SDRT SNRL
CNRST 1:返回参考点时,Cf轴的相对坐标值被清除。
0:返回参考点时,Cf轴的相对坐标值不被清除。
(※此项功能在 OT—Mate中无效)
ESFC 1:在 Cf轴控制时,即使在车削方式(信号 COFF闭合)下,位置检测器的反馈脉冲仍然有效。
0:在 Cf轴控制时,车削方式下,位置检测器的反馈脉冲无效。
(※此项功能在 OT—Mate中无效)
ADDCF 1:信号 DRN、GR1、GR2设定在 PMC的 G123(DGN123地址中)。
0:信号 DRN、GR1、GR2设定在标准地址 G118(DGN108)中。
RTCT 1:在深钻孔循环(G83、G87)中,钻孔过程中的回退位置为 R点平面(B型)。
0:在深钻孔循环(G83、G87)中,钻孔过程中的仅退回量距离(A型)。
(※此项功能在 OT—Mate中无效)
ILVL 1:孔加工循环中,用复位可更新初始点平面。
0:孔加工循环中,用复位不能更新初始点平面。
(※此项功能在 OT—Mate中无效)
TAPM 1:在攻螺纹循环主轴正转和反转的先送出M05。
0:在攻螺纹循环主轴正转和反转时出M03和M04。
SDRT 1:用M指令进行主轴分度的方向为负向。
0:用M指令进行主轴分度的方向为正向。
SNRL 1:用复位解除主轴分度方式。
0:不用复位解除主轴分度方式。
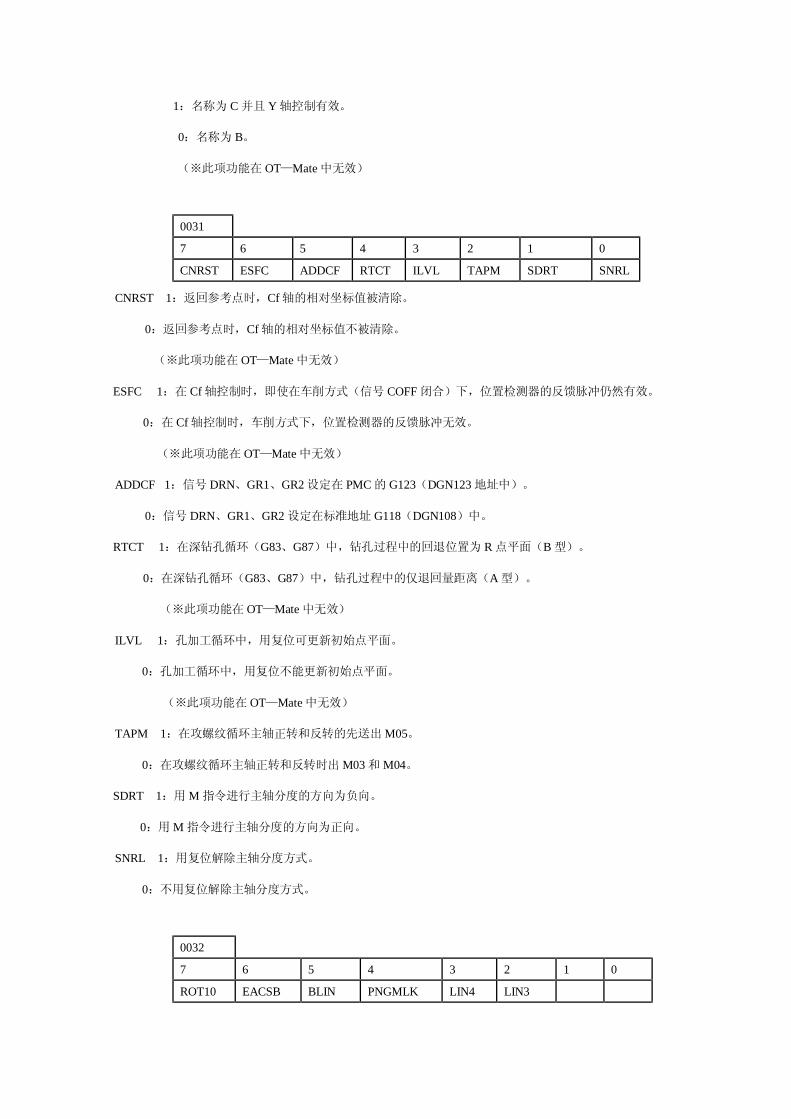
0032 7 6 5 4 3 2 1 0
ROT10 EACSB BLIN PNGMLK LIN4 LIN3

ROT10 1:Cs轴为 inch输出时,JOG进给、切削进给上限速度、快速进给 F0速度、返回参考点 FL速度等
参数的设定单位为 1度/min。
0:参数的设定单位为 0.1度/min。
(※此项功能在 OT—Mate中无效)
EACSB 1: PMC轴控制为 B规格。
0: PMC轴控制为 A规格。
(※此项功能仅 0—TC才有)
BLIN 1: B8位数字输入中,输入了小数点时的输入单位为 1.000(米制)、1.0000(英制)。
0:与输入单位无关,均为 1.000。
PNGMLK 1: PMC轴控制时,机床锁住有效。
0: PMC轴控制时,机床锁住无效。
LIN3和 LIN4 第三、第四轴的线性/旋转轴选择。1为线性轴;0为旋转轴。
(※此项功能在 OT—Mate中无效)
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
☆ 请注意:以下参数(0035~0069)均为 FANUC0—TC用! ☆
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
0035 7 6 5 4 3 2 1 0
ACMB NDSP
ACMB 1:选择 CMR有效。
0:选择 CMR无效。
0036 7 6 5 4 3 2 1 0
GSPC
GSPC 1:特殊 G代码为 C型。
0:特殊 G代码为 B型。
0037 7 6 5 4 3 2 1 0
PLC01 SPTP8 SPTP7 SPTP4 STPC SPTPZ SPTPX
PLC01 1:使用 0.1μ检测脉冲编码器。

0:不使用 0.1μ检测脉冲编码器
SPTPX ~SPTP8 X、Z、Cf到第八轴的位置检测器。
1:使用分离型脉冲编码器作为位置检测器。
0:不使用分离型脉冲编码器作为位置检测器。
0038 7 6 5 4 3 2 1 0
RSCMD1 DEVFL1 RSCMD2 DEVFL2 FLKY RSCMD3 DEVEFL3 DEC34
RSCMD1、DEVFL1 通道 1阅读/穿孔接口 I/O外设的设定,见附表 8。
RSCMD2、DEVFL2 通道 2阅读/穿孔接口 I/O外设的设定。
RSCMD3、DEVFL3 远程缓冲器通道 I/O外设的设定,见附表 9。
附表 8 通道阅读/穿孔接口 I/O外设的设定 附表 9远缓冲器通道 I/O外设的设定
FLKY 1:CRT/MDI键盘用全部键。
0:CRT/MDI键盘用标准键。
DEC34 为返回参考点*DEC3/*DEC4
地址改变减速信号,见附表 10。
附表 10 地址改变减速信号
0040 7 6 5 4 3 2 1 0
LOCC COMC TMCR SORT RWCNT DPOSUP NAMPR
LOCC 1:复置时不把局部变量(#1~33)置成空状态。
0:复置时把局部变量(#1~33)置成空状态。
COMC 1:复置时不把公共变量(#100~149)置成空状态。
0:复置时把公共变量(#100~149)置成空状态。
TMCR 1:用 T码调用子程序 O9000。
RSCMD1 DEVFL I/O外设 0 0 磁泡盒 0 1 软盘 1 0 RS232、PPR 1 1 新接口
RSCMD3 DEVFL3 I/O外设 0 0 磁泡盒、PPR 0 1 软盘 1 0 纸带阅读机等 1 1 纸带阅读机等
DEC34=0 DEC34=1 *DEC3 X19.7 X16.7 *DEC4 X19.5 X17.7

0:T码作为通常的刀具功能。
SORT 1:按数字顺序号显示程序库。
0:按通常规定显示程序库。
RWCNT 1:即使执行M02/M30,也不计算已加工守的总工件数。
0:即使执行M02/M30,均计算已加工守的总工件数。
DPOSUP 1:DPRINT指令输出数据时,如读到空的内容就输出空格。
0:DPRINT指令输出数据时,如读到空的内容什么也不输出。
NAMPR 1:在程序显示页面中显示程序名。
0:在程序不显示页面中显示程序名。
0041 7 6 5 4 3 2 1 0
ROVC ZRNJF
ROVC 1:ROV1D~ROV3D用作快移修调信号。
0:ROV1~ROV2用作快移修调信号。
ZRNJF 1:在点动进给状态执行手动返回参考点。
0:在点动进给状态不执行手动返回参考点。
(只在 PMC提供时有效)
0042 ASTCD 0043 EQCD 0044 SHPCD
ASTCD、EQCD、SHPCD:在用户宏程序 B中,EIA码的*、=、#钻孔语句用 8位数据设定。
0045 7 6 5 4 3 2 1 0
HSIF CLER NUABS CCINP RWDOUT RAL RDL
HSIF 1:M/S/T/B码的处理使用高速接口。
0:M/S/T/B码的处理使用普通接口。
CLER 1:使用复置按钮、外部复置信号和急停,应选择清除条件。
0:使用复置按钮、外部复置信号和急停,应选择复置条件。

NUABS 1:机床锁住信号断开且坐标系存在时,返回到原来的状态。
0:机床锁住信号断开且坐标系存在时,并不返回到原来的状态。
CCINP 1:两个进给段之间的到位宽度由另外的参数(NO.0609~0912)设定(不必用)。
0:到位宽度由普通参数设定。
RWDOUT 1:反绕时无信号输出。
0:反绕时有信号输出。
RAL 1:通过阅读/穿孔接口读入程序时,只保存一个程序。
0:通过阅读/穿孔接口读入程序时,保存所有程序。
RDL 1:通过外部控制的 I/O外设读入程序时,删除所有程序后才计录一个程序。
0:读入程序时与外部控制的 I/O外设的通常规定相同。
0046 7 6 5 4 3 2 1 0
GRPOS IGNAL SBAB RSTSW
GRPOS 1:加工轮廓图和刀具轨迹图中显示现行位置。
0:加工轮廓图和刀具轨迹图中不显示现行位置。
IGNAL 1:当其他刀架发生报警时,不进给保持。
0:当其他刀架发生报警时,选择进给保持。
(仅 0—TT用)
SBAB 1:一般页面的上端显示 1#刀架(仅 0—TT用)。
0:一般页面的上端显示 2#刀架。
RSTSW 1:复置键只对指定的刀架有效。
0:复置键对所有的刀架有效。
0047 7 6 5 4 3 2 1 0
M3LMT 2SP SEPH SP2C TIST
M3LMT 1:M代码等待范围是(仅 0—TT用)。
(参数 No243)×100~999。
0:M代码等待范围是(参数 No243)×100~999。
2SP 1:两个主轴(同个主轴、两个刀架)(仅 0—TT用)。
0:单个轴(单个轴、单个刀架)。

SEPH 1:手动进给的第一个手摇脉冲送到第一个刀架,第二个手摇脉冲发生 器送到第二个刀架(仅 0
—TT用)。
0:手动进给的手摇脉冲同时送到所有刀架。
SP2C 1:每个刀架的图形绘制在各自的页面上(仅 0—TT用)。
0:所有刀架的图形都绘制在一个页面上。
TIST 1:刀架选择信号有效(仅 1#刀架)(仅 0—TT用)。
0:刀架选择信号无效。
0048 7 6 5 4 3 2 1 0
SFFDSP IFE IT0 IFM TY1 TY0
说明:仅 0—TT用。只为第一个刀架设定的参数。
IFE 1:即使建立了刀架检测条件,也不检测刀架干扰。
0:刀架检测条件建立后,开始检测刀架干扰。
IT0 1:由 T码设定了 No0刀补后,按照现行的刀补号继续干扰。
0:由 T码设定了 No0刀补后,将中断干扰检测,直到下一个 T码设定了大于 0的刀补号。
IFM 1:手动方式下检测刀架干扰。
0:手动方式下不检测刀架干扰。
TY1、TY 0:设定 RN有刀架之间坐标系的关系。
0049 7 6 5 4 3 2 1 0
FML10 NPRV EFML10 S3JOG CHKSP
FML10 1:快移倍率和切削进给上限速度两个参数的增量系统应为 10mm/min 或 1inch/min。例如:对于
100mm/min,设定值应为 10000。
0:按各自通常的设定。
NPRV 1:即使没有位置编码器,每转进给指令也有效(在 CNG 内部,每转进给指令被自动地转换成每分
钟转进给指令)。
0:如果没有位置编码器,每转进给指令将无效。
EFML10 1:PMC控制轴的进给率(切削进给)在使用时乘以 10。
0:标准设定。
S3JOG 1:手动操作时,可同时控制的最大轴数为 3。

0:手动操作时,可同时控制的最大轴数为 1。
CHKSP 1:当 PMC的“SIND”信号闭合时,执行主轴波动检测。
0:即使 PMC的“SIND”信号闭合,也不执行主轴波动检测。
0050 7 6 5 4 3 2 1 0
NFED RSASCI STP2
0051 7 6 5 4 3 2 1 0
NFED ECLK NCKCD RSASCI SYNAK PARTY STP2
No0050和 No0051参数分别对应于 I/O=2和 I/O=3。
NFED 1:当使用阅读/穿孔接口输出程序时,其前后均无进给输出。
0:当使用阅读/穿孔接口输出程序时,其前后均有进给输出。
ECLK 1:远程缓冲器波特率的时钟取决于外部时钟。
0:远程缓冲器波特率的时钟取决于外部时钟。
(注:仅在使用 RS422接口时有效。)
NCKCD 1:在远程缓冲器内,不检测信号(CD)的状态。
0:在远程缓冲器内,检测信号(CD)的状态。
RSASCI 1:使用阅读/穿孔接口输入程序时采用 ASCⅡ码。
0:使用阅读/穿孔接口输入程序时采用 ISO/EIA码。
SYNAK 1:对于远程缓冲器接口内的协议 B、“SYN”和“NAK”码的输出受到控制。
0:与 SYNAK=1相同。
PARTY 1:提供奇偶校验位。
0:不提供奇偶校验位。
STP2 1:在阅读/穿孔接口中停止位是 2位。
0:在阅读/穿孔接口中停止位是 1位。
0052 7 6 5 4 3 2 1 0
NODIC8 NODIC7 NODIC6 NODIC5 NODIC4 NODIC3 NODICX NODIC
NODICX~ NODIC8:对于 1/10增量系统,每个 PMC控制轴现行位置显示中,小数点的位置无论是否等同于
1/10增量系统,都要设定这项参数。

NODIC 1:PMC控制轴的现行位置显示与标准规定相同,而不是按照 1/10增量系统的小数点位置。
0:PMC控制轴的现行位置显示按照 110增量系统的小数点位置。
0053 LBLCD
0054 RBLCD
LBLCD、RBLCD 用户程序 B中的钻孔语句和 EIA码由顺序的 8位数设定。
0055 7 6 5 4 3 2 1 0
RMSTS ITPCNT RS42 PROTCA ETX ASCII
RMSTS 1:当过程缓冲器接口使用协议 A时,“SAT”电报的远程缓冲器状态通过从主计算机转到“SET”
电报而无条件返回。
0:当过程缓冲器接口使用协议 A时,“SAT”电报的远程缓冲器状态通常不用任何指定而返回。
ITPCNT 000:G05插补数据用 8ms。
001:G05插补数据用 2ms。
010:G05插补数据用 4ms。
011:G05插补数据用 1ms。
100:G05插补数据用 16ms。
RS42 1:远程缓冲器使 RES422接口。
0:远程缓冲器使 RS232C接口。
PROTCA 1:通信协议采用协议 A。
0:通信协议采用协议 V。
EXT 1:“EXT”作为结束码。
0:“CR”作为结束码。
ASCII 1:除 NC数据外的所有通信都使用 ASCⅡ码。
0:除 NC数据外的所有通信都使用 ISO码。
0056 7 6 5 4 3 2 1 0
MUSR MSYL MSUB MPRM MTSE MBLK MSKT

MUSR 1:使用用户程序中断功能。
0:不使用用户程序中断功能。
MSYL 1:在循环操作中执行用户宏程序中断。
0:在循环操作中不执行用户宏程序中断。
MSUB 1:中断程序中的局部变量与主程序相同(子程序类型)。
0:局部变量只在中断程序中有交(用户宏程序类型)。
MPRM 1:中断有效/无效的M代码由参数设定。
0:中断有效/无效的M代码是M96/M97。
MTSE 1:中断信号是状态触发类型。
0:中断信号是边缘触发类型。
MBLK 1:NC中断程序的语句在程序段结尾执行(用户宏程序中断类型Ⅱ)。
0:NC中断程序的语句在程序段中断执行(用户宏程序中断类型Ⅰ)。
MSKT 1:中断时,绝对值坐标系被设定成跳步坐标系。
0:中断时,绝对值坐标系不被设定成跳步坐标系。
0057 7 6 5 4 3 2 1 0
MBCLR CROUT MIC
MBCLR 1:MDI—B程序可被复置键清除。
0:MDI—B程序不能被复置键清除。
CROUT 在 B/D打印时,ISO码数据输出后。 1:“LF”和“CR”都输出。
0:只有“LF”输出。
MIC 1:在忽略小数点时,最小设定单位乘 10。
0:在忽略小数点时,最小设定单位不乘 10。
0059 7 6 5 4 3 2 1 0
EDMZ EDMX EDPZ EDPX EDMX 、EDMZ 对于 X、Z轴负方向指令。
1:快移和切削进给时外部减速信号有效。 0:外部减速信号只对快移有效。 EDPX 、EDPZ 对于 X、Z轴正方向指令。
1:快移和切削进给时外部减速信号有效。 0:外部减速信号只对快移有效。

0060 7 6 5 4 3 2 1 0
IGNCOL C14DGN LDDSPG DADRDP IGNCOL 1:9in高分辨率彩显。 0:9in高分首席率单显。 C14DGN 1:14in诊断页面。 0:9in诊断页面。
0061 7 6 5 4 3 2 1 0
ALL78 DSP78 EBC8 EBE7 EBE4 EBCZ EBCY EBCX ALL78 1:第七轴和第八轴在现行位置的一般显示中显示(严禁使用)。 0:第七轴和第八轴不在现行位置的一般显示中显示。 DSP78 1: 第七轴和第八轴在现行位置的绝对值和相对值坐标系显示中显示。 0:第七轴和第八轴不在现行位置的绝对值和相对值坐标系显示中显示。 EBCX~EBC8 1:不用于 PMC轴的 DI/DO。 0:用于 PMC轴的 DI/DO。
0062 7 6 5 4 3 2 1 0
C8NG ADLIN8 ADLIN7 C8NG 1:第八轴无效。 0:第八轴有效。 ADLIN7、ADLIN8 1:设定第七轴为旋转轴。 0:设定第七轴和第八轴为直线轴。
0063 7 6 5 4 3 2 1 0
SPMRPM EAXOV M198P PRSTIN MTDSPI
SPMRPM 1:D在 S码五位模拟控制时,主轴最大转速成为 99999r/min。
0:在 S码五位模拟控制时,主轴最大转速成为标准值。
EAXOV 1:对于 PMC轴,空运转和分辩率修调有效。
0:对于 PMC轴,空运转和分辩率修调无效。
M198P 1:M198的地址 P表示一个程序和倍率修调有效。
0:M198的地址 P表示一个程序和倍率修调无效。
PRSTIN 1:当输入采用英制时,自动坐标系的设定作为一个单独的参数来处理。 0:当输入采用英制时,自动坐标系的设定不作为一个单独的参数来处理。 MTDSPI 1:机床坐标系的显示适应输入系统。
0:机床坐标系的显示不适应输入系统。

0064 7 6 5 4 3 2 1 0
P2SG2 P2SG1 NPA SETREL
P2SG2、P2SG1主轴及第二个位置编码器之间齿轮齿数比,见附表 11。
附表 11 主轴及第二个位置编码器之间齿轮齿数比
NPA 1:当有报警产生或进入操作信息时,页面不转换 到报警信息页面。
0:当有报警产生或进入操作信息时,页面转换到报警信息页面。
SETREL 1:在相对位置显示时,每一个轴都被预置。
0:预置和通常一样。
0065 7 6 5 4 3 2 1 0
M3B
M3B 1:每个程序段中最多使用 3个M代码。
0:每个程序段中使用的M代码数按照通常的规定。
0066 7 6 5 4 3 2 1 0
ZM8 ZM7 ZM8、ZM7 第七轴和第八轴返回参考点方向及接通电源时的齿隙方向。
1:负向。 0:正向。
0067 DMR7 GRD7
0068 DMR8 GRD8
DMR7、DMR8:设定第七轴和第八轴的检测倍率。
GRD7、GRD8:设定第七轴和第八轴的参考计数器容量。
倍率 P2SG2 P2SG1 ×1 0 0 ×2 0 1 ×4 1 0 ×8 1 1

0069 7 6 5 4 3 2 1 0
PLHZ PLGN4 PLGN3
PLHZ 1:通电后,当返回参考点两次或更多次时,同步轴返回参考点的 G28指令以快移速度定位。
0:同步返回参考点的 G28指令为通常时的低速(与手动返回参考点相同)。
PLGN4、PLGN3
1:加工多边形时,第三轴用作同步轴。
0:加工多边形时,第四轴用作同步轴。
注:设定 PLGN3和 PLGN4中的一个为“1”。如果两者都为“0”,则每三轴用作同步轴;如果两者都
为“1”,则第四轴用作同步轴。同步轴必须是 NC控制轴和控制轴。
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
☆ 请注意:以下参数在设定时均按十进制数输入!!! ☆
☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆
0100 CMRX 0101 CMRZ 0102 CMR3 0103 CMR4
CMRX、CMRZ、CMR3、CMR4分别为 X轴、Z轴、第三轴、第四轴的指令的倍率, 见附表 12。
附表 12 X轴、Z轴、第三轴、第四轴
的指令的倍率
一任意指令倍率(No.0035 ACMR=1)被用时,有两种设定方式:
①当一个指令倍率是 1/2~1/27时;
预设定值= 1001
+指令倍率
②当一个指令倍率是 2~48时;预设定值=2*(指令倍率)
设定码 倍率 1 0.5 2 1 4 2
10 5 20 10

0108 SPLOW
SLOW:主轴速度以恒定速度旋转,或主轴变档速度(当参数No.003 GST=1)
设定值= 4905×最大电动机速度
变档电动机速度
设定范围 0~255r/min
0109 THDCH
在 G92螺纹切削循环的倒角宽度的设定。 设定范围 0~127(0.1螺距)
0110 SCTTIM
检查主轴速度到达信号设定的延时时间,这时间的建立是从执行 S码开始,主轴速度到达为止的时间,
设定范围 0~255ms。
0111 MBUF1 0112 MBUF2
MBUF1、MBUF2:可最多设定两个其后的程序段不进行缓存处理的M代码。例如:设定了M03时,
M03下面的程序段不进缓存区直接处理。
0113 PSORGX 0114 PSORGZ
PSORGX、PSORGZ:分别为 X、Z轴参考点上的栅格数(0~255)。
0117 OFCMP 0118 TLCMP 0119 OFMAX 0120 TLMAX
与简易刀具寿命管理功能相关的参数:
OFCMP:偏置号补偿值,设定值为 0~32。
TLCMP:刀具选择号补偿值,设定值为 0~99。
OFMAX:偏置号最大值,设定值为 0~32。
TLMAX:刀具选择号最大值,设定值为 0~99。
]
0121 MULHPG
MULHPG:手轮进给的倍率 n,设定值为 1~127。
设定手轮进给量选择信号MP2接通时的倍率,通常设定为 100。

0122 OFSNO
OFSNO:刀具补偿量设定值直接输入 B 功能中,刀具补偿号的设定(设定工件坐标系偏量时)。设定
值为 1~32。
0123 GRPAX
GRPAX:绘图功能中图形坐标系的建立。
GRPAX=0:X↑Z→(第 1象限) GRPAX=1:X→Z↑(第 1象限)
GRPAX=2:X↓Z→(第 4象限) GRPAX=3:X→Z↑(第 4象限)
GRPAX=4:X↑Z→(第 2象限) GRPAX=5:X↓Z→(第 3象限)
0130 UPKY 0131 DWNKY 0132 PGTKY 0133 LFTKY 0134 FWDKY 0135 BACKY
UPKY=1 为+X ; DWNKY=2 为-X;PGTKY=3 为+Z ;LFTKY=4 为-Z;
FWDKY=5 为+3 ;BACKY=6 为-3。在软件操作面板上确立点动轴和方向键,设定值为 1~6。
0140 NSW11 * *
0203 NSW88 这些参数是设定软件的 8个开关的名称,每个开关对应 8个参数,即最多可设定 8个字符。每个参数设
一个字符,第一个开关对应为 0140~0147,其余按类似排列。字符代码参照附表 13: 字符 码 字符 码 字符 码
A 65 W 87 ( 40 B 66 X 88 ) 41 C 67 Y 89 * 42 D 68 Z 90 + 43 E 69 0 48 , 44 F 70 1 49 — 45 G 71 2 50 · 46 H 72 3 51 / 47 I 73 4 52 : 58 J 74 5 53 ; 59 K 75 6 54 〈 60 L 76 7 55 = 61 M 77 8 56 〉 62

N 78 9 57 ? 63 O 79 。 32 @ 64 P 80 i 33 I 91 Q 81 ” 34 ? 92 R 82 # 35 $ 93 S 83 ¥ 36 ] 94 T 84 % 37 - 95 U 85 & 38 V 86 , 39
0204 CCLMP
在钻孔循环中,夹紧 C轴的M代码,设定值为 00~99。
0212 DFXM03
在孔切削循环中,主轴正向旋转的M代码,M码建立值是 1~255(如果 0被建立,则M03输出)。
0219 MCDCNT 设定一个M代码,该码执行后则将机床加工的总零件数和加工零件数进行计数,范围是 1~255(0则无
效,不能设 98和 99)。
0220 UMGCD0 * *
0229 UMGCD9
10个 G代码调用用户宏程序。
UMGCD0 G代码调节器用用户宏程序 09010。
UMGCD1 G代码调节器用用户宏程序 09011。
UMGCD2 G代码调节器用用户宏程序 09012。
UMGCD3 G代码调节器用用户宏程序 09013。
UMGCD4 G代码调节器用用户宏程序 09014。
UMGCD5 G代码调节器用用户宏程序 09015。
UMGCD6 G代码调节器用用户宏程序 09016。
UMGCD7 G代码调节器用用户宏程序 09017。
UMGCD8 G代码调节器用用户宏程序 09018。
UMGCD9 G代码调节器用用户宏程序 09019。
范围是 1~255个(有M00时,不能调用用户宏程序。当设为 0时,等于没有设)。

0230 UMMCD4 * *
0239 UMMCD13
建立 101上M码调用用户宏程序
UMMCD4 M代码调用用户宏程序 09020。
UMMCD5 M代码调用用户宏程序 09021。
UMMCD6 M代码调用用户宏程序 09022。
UMMCD7 M代码调用用户宏程序 09023。
UMMCD8 M代码调用用户宏程序 09024。
UMMCD9 M代码调用用户宏程序 09025。
UMMCD10 M代码调用用户宏程序 09026。
UMMCD11 M代码调用用户宏程序 09027。
UMMCD12 M代码调用用户宏程序 09028。
UMMCD13 M代码调用用户宏程序 09029。
设定范围是 6~255(用M00指令时,不能调用用户宏程序。当设为 0是等于没有设)。
0240 UMMCD1
0241 UMMCD2
0242 UMMCD3
UMMCD1 调用用户宏程序 009001。
UMMCD2 调用用户宏程序 009002。
UMMCD3 调用用户宏程序 009003。
这三个参数均通过M码调用用户宏程序。
设定范围是 3~255(用M00指令时,不能调用用户宏程序。当设为 0时,等于没有设)。
*0243 WAITM
输入一个三位M代码的百位数最小值,(为 OTT)则其上的 100个M代码为有效。
*0246 MCALL
可以通过M代码调用用户宏程序,设定范围是 3~255。

*0247 MACRET 可以通过M代码调用用户宏程序,设定范围是 3~255。
*0248 M198M
M码通过除了M198以外的方法调用程序寄存器,设定范围是 3~255(当设为 0时,等于没有设)。
*0250 BRATE2
BRATE2 阅读器/穿孔机的波特率(当参数 I/O是 2时有效)。
*0251 BRATE3
BRATE2 遥控器 A/B的波特率(当参数 I/O是 3时有效),见附表 14。
附表 14 设定值与波特率的关系
设定值 波特率 设定值 波特率 1 50 7 600 2 100 8 1200 3 110 9 2400 4 150 10 4800 5 200 11 9600 6 300 12 19200
*0252 PRSTCT 延长 RST信号输出时间(单位×16ms)。
RST输出时间=复置时间+参数指×16ms。 设定范围 0~225。
*0296 SVAXX *0270 SVAXZ *0271 SVAX3 *0272 SVAX4 *0273 SVAX7 *0274 SVAX8
备注:政党设定为 0,设定范围是 1~6,见附表 15。
附表 15 设定范围
设定值 含义 设定值 含义 1 1(M34,M35) 4 4(M47,M48) 2 2(M37,M38) 5 7(M134,M135) 3 3(M44,M45) 6 8(M137,M138)
设定这些参数为所有控制轴,当所有控制轴不设定或有错误设定时,有一伺服报警。

*0275 CMR7 *0276 CMR8
CMR7 建立第七轴指令倍率。
CMR8 建立第八轴指令倍率。
参考参数 0100~0130项
*0279 PSELP3 *0280 PSELP4
PSELP3 为第三轴设定基本坐标系。
PSELP4 为第四轴设定基本坐标系,建立值及含义见附表 16。 附表 16 设定基本坐标系的建立值及含义
建立值 含义 建立值 含义 2 基本三轴下 Y轴 6 与 Y轴并行 5 与 X轴并行 7 与 Z轴并行
*0281 PSYNCZ+PSYNCX *0282 PSYNC3+PSYNC4
PSYNCX、PSYNCZ、PSYNC3、PSYNC4 由 X轴、Z轴、第三轴、第四轴建立同步控制轴,范围是 0~3。
0:与 X轴同步。
*0285 DPAX7 *0286 DPNX8
DPAX7 建立第七轴的名。
DPAX8 建立第八轴的名。
这个设定码通常与操作面板上码一致,当不建立时,55和 56被履行。
*0291 PL11D1 *0292 PL11D2
PL11D1 指定直线轴的极坐标插补。
PL11D2 指定旋转轴的极坐标插补。
它们的设定值与对应的控制轴见附表 17。 附表 17 设定值与对应的控制轴
设定值 控制轴 设定值 控制轴 1 X 3 C 2 Z 4 Y

0500 INPX
INPX:标准设定 20(米制输出),标准设定 12(英制输出)。
0501 INPZ 0502 INP3 0503 INP4
以上四个参数分别为 X轴、Z轴,第三轴、第四轴的到位宽度。设定范围为 0~32767检测单位。
到位检测在如下场合进行:由快速进给至快速进给,由快速进给至切削进给由切削进给至快速进给。
0504 SERRX 0505 SERRZ 0506 SERR3 0507 SERR4
以上四个参数分别为 X轴、Z轴、第三轴、第四轴移动期间位置偏移量的限制值。设定范围为 0~32767。
0508 GRDSX 0509 GRDSZ 0510 GRDS3 0511 GRDS4
以上四个参数分别为 X轴、Z轴、第三轴、第四轴的栅格移动量。
设定范围:0~±32767检测单位。
当参考点移动时,此参数需要符号。
0516 PSNAGN
S4/S5 位控制 (模拟输出),是周速恒定控制(模拟输出)的增益调整用参数,设定模拟输出中调整
增益用的数据。
设定范围为 700~1250。
0517 LPGIN
LPGIN 设定位置控制的环路增益。
设定范围为 1~9999(单位 0.01s1−)。
0518 RPDFX 0519 RPDFZ 0520 RPDF3 0521 RPDF4

以上四个参数分别为 X轴、Z轴、第三轴、第四轴的快移速率。
设定范围为 30~24000,单位为 mm/min。
30~9600,单位为 0.1in/min。
注:其他设定值设 49号参数 FMLIO为“1”,1/10增量系统的单位相同。
0522 LINTX 0523 LINTZ 0524 LINT3 0525 LINT4
以上四个参数分别为 X轴、Z轴、第三轴、第四轴的快移时的加减速时间常数。设定范围为 8~24000ms。
0526 THRDT
THRDT X轴螺纹切削循环(G92)的时间常数。
设定范围为 8~24000ms。
与 THDFL(528号参数)配合设定一最佳值。
0527 FEDMX
FEDMX(X轴、Z轴)切削进给上限速度。
设定范围为 6~15000,单位为 mm/min。
6~6000,单位为 0.1in/min。
0529 FEEDT
FEEDT 切削进给和点动进给指数型加/减带时间常数。
设定范围为 0~4000ms。
有用指数型加/减速时设为 0。
0530 FEDFL
FEDFL 切削进给指数型加/减速时间的下限时间常数。
设定范围为 6~15000,单位为 mm/min。
6~6000,单位为 0.1in/min。
0531 SPALW
SPALW 在主轴速度变动检测功能中,达到指令速度的允差率。
设定范围为 1~100%(恒表面速度切削)。

0532 SPLMT
SPLMT 在主轴速度变动检测功能中,出现报警的主轴速度的变动率。
设定范围为 1~100%(恒表面速度切削)。
0533 RPDFL
RPDFL 全部轴通用的快速修调的最低进给速度。
设定范围为 6~15000,单位为 mm/min。
6~6000,单位为 0.1in/min。
0534 ZRNFL
ZRNFL 全部轴通用的返回参考点的低速(FL)的设定。
设定范围为 6~15000,单位为 mm/min。
6~6000,单位为 0.1in/min。
0535 BKLX 0536 BKLZ 0537 BKL3 0538 BKL4
以上四个参数分别为 X轴、Z轴、第三轴、第四轴的间隙量。
设定范围为 0~2500,单位为 0.01mm。
0~2500,单位为 0.001in。
X轴用直径编程时,用直径值设定。
0539 SPDLC
SPDLC 设定主轴速度偏移补偿值,即主轴速度指令电压零偏置。(恒表面速度切削)
设定范围为 0~±8191(单位为 VELO)。
0540 GRMX1 0541 GRMX2 0542 GRMX3 0543 GRMX4
以上四个参数设定主轴指令电压为 10V时,对应 1~4挡的主轴速度,用于恒切削线度控制功能。
设定范围为 1~9999(单位为 r/min)

0544 DRFTX 0545 DRFTZ 0545 DRFT3 0546 DRFT4
以上四个参数设定主轴指令电压为 10V时,对应 1~4挡的主轴速度,用于恒切削线度控制功能。
设定范围为 1~9999(单位为 r/min)
0544 DRFTX 0545 DRFTX 0545 DRFT3
以上三参数依次为 X轴、Z轴、第三轴伺服环内发生的漂移的补偿量。
设定范围是为 0~8191(单位为 VELO)。
自动补偿的场合,此值自动变为零。
0548 JOGFL
JOGFL 点动进给指数型加/减速的低限。
设定范围为 6~15000,单位为 mm/min。
6~6000,单位为 0.1in/min。
0550 SEQINC
SEQINE 顺序号自运插入时的号码增量值。
设定范围为 0~9999。
0551 SLOWSP
SLOWSP 恒表面速度控制时(G96)的主轴最低转速
0552 BRATE0 BRATE0 设定阅读/穿孔的波特率(当参数 I/O为 0时有效),见附表 18。
附表 18 阅读/穿孔的波特率(I/O为 0时) 设定值 波特率 设定值 波特率
1 50 7 600 2 100 8 1200 3 110 9 2400 4 150 10 4800 5 200 11 9600 6 300
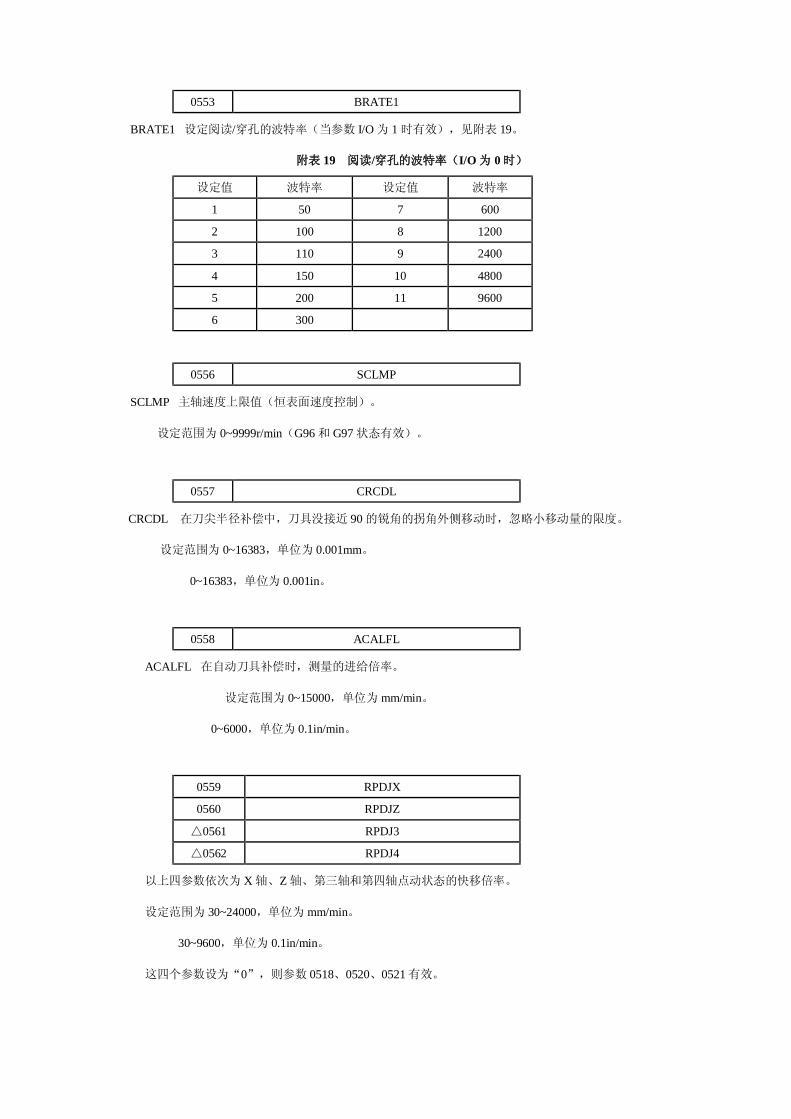
0553 BRATE1
BRATE1 设定阅读/穿孔的波特率(当参数 I/O为 1时有效),见附表 19。
附表 19 阅读/穿孔的波特率(I/O为 0时)
设定值 波特率 设定值 波特率 1 50 7 600 2 100 8 1200 3 110 9 2400 4 150 10 4800 5 200 11 9600 6 300
0556 SCLMP
SCLMP 主轴速度上限值(恒表面速度控制)。
设定范围为 0~9999r/min(G96和 G97状态有效)。
0557 CRCDL
CRCDL 在刀尖半径补偿中,刀具没接近 90的锐角的拐角外侧移动时,忽略小移动量的限度。
设定范围为 0~16383,单位为 0.001mm。
0~16383,单位为 0.001in。
0558 ACALFL
ACALFL 在自动刀具补偿时,测量的进给倍率。
设定范围为 0~15000,单位为 mm/min。
0~6000,单位为 0.1in/min。
0559 RPDJX 0560 RPDJZ △0561 RPDJ3 △0562 RPDJ4
以上四参数依次为 X轴、Z轴、第三轴和第四轴点动状态的快移倍率。
设定范围为 30~24000,单位为 mm/min。
30~9600,单位为 0.1in/min。
这四个参数设为“0”,则参数 0518、0520、0521有效。

*0564 SPWDTH
SPWDTH 主轴波动检查功能中不引起报警的允许波动值。
设定范围为 0~32767r/min。
0580 SLPGM1 0581 SLPGM2 0582 SLPGM3 0583 SLPGM4
以上四参数分别为主轴 1~4挡的伺服环增益倍率。
设定值=2048×(E/L)×α×1000
式中 E——主电动机转速为 1000rpm时的电压(V);
L——主电动机每转的角度(通常 360°);
α——检测单元(度)。
0584 SLPGIN
SLPGIN 主轴环增益。
设定范围为 1~9999(单位为 0.01s1−)。
0585 SRPDFL
SRPDFL 主轴快移修调最低速度(F0)。
设定范围为 660~15000度/min。
0586 SZRNFL
SZRNFL 主轴定向时 FL速度。
设定范围为 660~15000度/min。
0587 MORT
MORT 主轴定向M码。
设定范围为 06~97。
0588 MERGS
MERGS 解除主轴分度的M码。
设定范围为 06~97。

0589 MSINDX
MSDEG M码调用时M码的初始值。
设定范围为 06~97。
0590 MSDEG
MSDEG M码调用的基准旋转值。
设定范围为 1~60度。
0591 PDWEL
PDWEL 钻孔加工循环中,C轴松卡指令的暂停时间。
设定范围为 1~32767ms。
0593 STPEX 0594 STPEZ 0595 STPE3 0596 STPE4
以上四参数依次为 X轴、Z轴、第三轴和第四轴停止位置误差极限。
设定范围为 0~32767检测单元。
*0597 G05MOM
GO5MOM 高速遥控缓冲器控制轴数。
设定范围为 1~最多控制轴数;高速缓控缓冲器 B总是设 3。
*0598 PCHK
PCHK 通常刀架 1和 2所用的程序号的最小值。
*0600 PARTRQ
PARTRQ 设定所需加工工件数。
设定范围为 0~9999。
*0601 PEXPJX *0602 PEXPJZ *0603 PEXPJ3 *0604 PEXPJ4

以上四参数分别设定 X轴、Z轴、第三轴和第四轴停止位置误差极限。
设定范围:0~32767检测单位。
*0605 PFLJGX *0606 PFLJGZ *0607 PFLJG3 *0608 PFLJG4
以上四参数分别设定 X轴、Z轴、第三轴和第四轴手动进给指数升降速率。
设定范围为 6~15000,单位为 mm/min。
6~6000,单位为 in/min。
*0609 INPDX *0610 INPDZ *0611 INPD3 *0612 INPD4
以上四参数分别设定 X轴、Z轴、第三轴和第四轴手动进时指数升降速率。
设定范围为 6~15000,单位为 mm/min。
6~6000,单位为 in/min。
如果设为零,则所有轴通用数据有效(参数 548)。
*0613 PSANG2
PSANG2 S4/S5控制(模拟输出)在恒表面速度控制时,设定第二主轴的增益,调节数据(模拟输出)。
设定范围为 700~1250,标准设定值为 1000。
注:参考参数 0516。
*0614 SPDLC2
SPDLC2 设定第二主轴的速度偏置补偿值,即主轴速度指令电压的零偏置补偿值。
*0615 CIMAX1 *0616 CIMAX2
以上二参数分别设定主轴速度指令电压是 10V时,第二主轴对应 1档、2档的速度。
设定范围为 1~9999r/min。

*0617 PSANG3
PSANG3 S4/S5位控制(模拟输出),在恒表面速度控制时,设事实上第三主轴的增益,调节数据(模
拟输出)。
设定范围为 700~1250,标准设定值:1000。
注:参考参数 0516。
*0618 SPDLC3
SPDLC3 设定第三主轴的速度偏置补偿值,即主轴速度指令电压的零偏置补偿值。
*0619 G3MAX1 *0620 G3MAX2
以上二参数分别设定第三主轴速度指令电压是 10V时,第三主轴对应 1档、2档的速度。
设定范围为 1~9999r/min。
*0630 9HRDSX
9HRDSX 9in高分辨率图形的点移量(水平方向)。
设定范围为 0~±32767。
*0631 9HRDSY
9HRDSX 9in高分辨率图形的点移量(垂直方向)。
设定范围为 0~±32767。
*0636 PEXDEC
PEXDEC 外部减速(全轴通用)。
设定范围为 0~15000,单位为 mm/min。
0~6000,单位为 0.1in/min。
*0651 PEFDTX *0652 PEFDTZ *0653 PEFDT3 *0654 PEFDT4
以上四参数分别设定各轴在 PMC轴切削进给时的指数型升降速时间常数。

*0657 PEAFLX *0658 PEAFLZ *0659 PEAFL3 *0660 PEAFL4
以上四参数分别设定 PMC轴切削进给时每轴指数型升降速低限速度(FL)。
设定范围为 0~15000,单位为 mm/min。
0~6000,单位为 0.1in/min。
如果设为零,HC切削 FL速度有效。
*0667 POLCLP
POLCLP 设同步轴的上限速度。
设定范围为 0~1.2×103/POLROT
*0668 POLSPD
POLSPD 设同步轴的上限速度。
设定范围为 1~2000pus/min。
*0669 JOGEPL
JOGEPL 同步轴的旋转开关设到位置 10时的点动速率。
设定范围为 1~2000pus/min。
*0670 RFDFLPL
RFDFLPL 同步轴快移修调的最低进给速率(F0)。
设定范围为 6~15000pus/min。
*0671 ZRNFLPL
ZRNFLRL 同步轴返回参考点时最低进给速率(FL)。
设定范围为 6~15000pus/min。
0700 LT1X1 0701 LT1Z1 0702 LT131 0703 LT141 0704 LT1X2

0705 LT1Z2 0706 LT132 0707 LT142
设定上面所示的存储行程极限。
设定范围为 0~±99999999(单位为 0.001mm,0.0001in)
按距参考点的位置设定..
在直径编程的场合,X轴用直径指定位位置,用参数设定的区域外侧面为禁区,通常按照机床的最大行
程设定,进入禁区会报警。由于检测系统可能有误差,应在行程中留有一定余量,米制的场合,大致留有的
余量为快速进给速度乘以 1/5值(mm)。
0708 PRSX 0709 PRSZ △0710 PRS3 △0711 PRS4
以上四参数分别为进行自动坐标系设定时,X轴、Z轴、第三轴、第四轴的参考点坐标。
设定范围:0~±99999999(单位为 0.001mm,0.0001in)
0712 SPTIME 0713 PSGRDX 0714 PSGRDZ
SPTIME 在主轴速度变动检测中,经过一定的时间仍未达到指令转速时,开始检测的时间(p)。
设定值为 0~999999(ms)。
PSGRDX、PSGRDZ 依次为 X轴、Z轴的栅格宽度。
设定为 0时,不输出位置信号。
为使以快速进给速度的最大设定值 24m/min 移动时,位置信号的输出不会遗漏。栅格宽度的设定必须
为 6400以上的值。
0717 MRCCD
MRCCD 重复固定循环的切削深度(G71、G72)。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0718 MRCDT
MRCDT 重复固定循环的切削深度(G71、G72)

设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0719 PESCX 0720 PESCZ
PESCX、PESCZ 依次为 X轴,Z轴方向重复固定循环 G73,G74的回退量。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0721 PATIM
PATIM 重复固定循环 G73的分割数。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0722 GROVE
GROVE RCDT 重复固定循环 G74,G75的退回量。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0723 THRPT
THRPT 重复固定循环 G76中最终精车的重复次数。
设定范围为 1~99999999
0724 THANG
THANG 重复固定循环 G76的刀尖角度。
设定范围为 0、29、30、55、60、80。
0725 THCLM
THCLM 重复固定循环 G76中的最小切削深度。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。

0726 THDFN
THDFN 重复固定循环 G76的精加工余量。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0728 WIMAX
WIMAX 刀具磨损补偿增量输入时的允许输入值的设定。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0729 WOMAX
WOMAX 刀具磨损补偿量最大值的设定。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0730 MIRSS
MIRSS 双刀架镜像加工中使用,坐标系偏移时刀架间距的设定。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
0731 GANMAX 0732 GANMAZ
GANMAX、GANMAZ 依次为自动补偿时的 X、Z轴γ值。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
X轴值为半径值。
0733 EPCX 0734 EPCZ
EPCX、EPCZ依次为 X、Z轴自动补偿功能的γ值。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in)。
X轴值为半径值。

0735 REF2X 0736 REF2Z
REF2X、REF2Z 依次为 X、Z轴第二参考点距第一参考点距离。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in),
1~99999999(单位为 0.001度)。
0739 ABSXP 0740 ABSZP
ABSXP、ABSZP 使用绝对值脉冲编码器时,在参考点返回位置时的计数器值,由于此值在完成手动返
回参考点后会自动设定所以不需设此参数。
设定范围为 1~99999999(单位为 0.001mm),
1~99999999(单位为 0.0001in),
1~99999999(单位为 0.001度)。
0743 TLSXP 0744 TLSXM 0745 TLSZP 0746 TLSZM
TLSXP X轴至+接触的距离。
TLSXM X轴至-接触的距离。
TLSZP Z轴至+接触的距离。
TLSZM Z轴至-接触的距离。
设定范围为 0~±99999999(单位为 0.001mm),
0~±99999999(单位为 0.0001in)。
设定由测量基准点到每一个接触面的距离。
0747 LT2X1 0748 LT2Z1
*0749 LT232 *0750 LT242
当 EXZLM2(G129.6)信号接通时,用此参数,而不用 0700~0707检测行程极限。
注:只在 No.09154LMZ=1时有效。

0751 LT2X2 0752 LT2Z2
设定上面所示的存储行程极限。
设定范围为 0~±99999999(单位为 0.001mm),
0~±99999999(单位为 0.0001in)。
设定参考点的行程极限,在用直径编程的场合,X轴用直径指定位置。禁止区域用内侧或外侧,在参数
INPUT(No24)中设定。
*0757 PECINTZ *0758 PECINT3 *0759 PETINT4 *0760 PETINTX
以上参数是表示每个轴螺距误差的补偿的补偿距离。
设定值:
半径设定时,8000~99999999(米制)
4000~99999999(英制)
直径设定时,16000~99999999(米制)
8000~99999999(英制)
*0778 POLROT
POLROT:设定同步轴每一转的移动距离。
设定范围为 1~9999999。
*0779 PARTAL
PARTAL:加工工件总数。
设定范围为 0~99999999。
*0780 REF3X *0781 REF3Y *0782 REF33 *0783 REF34
设定 X轴~第四轴,从第一参考点到第三参考点的距离。
设定范围为 0~±99999999(单位为 0.001mm),
0~±99999999(单位为 0.0001in)。

*0784 REF4X *0785 REF4Y *0786 REF43 *0787 REF44
设定 X轴~第四轴,从第一参考点到第四参考点的距离。
设定范围为 0~±99999999(单位为 0.001mm),
0~±99999999(单位为 0.0001in)。
*0815 PRSTIX *0816 PRSTIZ *0817 PRSTI3 *0818 PRSTI4
以上参数是自动坐标系设定时参考点的坐标值(英制输入,参数 NO.063第一位 PRSTIN=1)。
设定范围为 0~±99999999。
*0821 LT171 *0822 LT181 *0823 LT172 *0824 LT182
设定第七、第八轴的行程极限。
设定范围为 0~±99999999(单位为 0.001mm),
0~±99999999(单位为 0.0001in)。
设定到参考点的距离。
*0827 ABS7P *0828 ABS8P
以上两参数表示使用绝对值编码器时,返回参考点位置时的计数器数值,在手动返回参考点时,此值自
动设定。
1000 PECORGX
PECORGX X轴螺距误差补偿的原点。
设定范围为 0~127。
1001~1008 X轴螺距误差补偿量的设定,设定范围为 0~±7。

2000 PECORGZ
PECORGZ Z轴螺距误差补偿原点。
设定范围为 0~127。
2001~2008 Z轴螺距误差补偿的原点。
设定范围为 0~±7。
3000 PECORG3
PECORG3 第三轴螺距误差补偿原点。
设定范围为 0~127。
3001~3008 第三轴螺距误差补偿的原点。
设定范围为 0~±7。
4000 PECORG4
PECORG4 第四轴螺距误差补偿原点。
设定范围为 0~127。
4001~4008 第四轴螺距误差补偿的原点。
设定范围为 0~±7。
*7001 7 6 5 4 3 2 1 0
DECIS SCWS
DECIS 1:返回参考点时,当减速信号是 1时,机床减速。
0:返回参考点时,当减速信号是 0时,机床减速。
SCWS 1:最小指令增量是英制(英制系统)。
0:最小指令增量是米制(米制系统)。
*7002 7 6 5 4 3 2 1 0
PPDS
PPDS 1:通过坐标设定相对坐标也被预置。
0:通过坐标设定相对坐标不被预置。

7010 7 6 5 4 3 2 1 0
APRSS OFFVYS
APRSS 1:返回参考点时设自动坐标系。
0:返回参考点时设不进行自动坐标系。
OFFVYS 1:当 VRDI接通时,在 PRDY输出前伺服不报警。
0:当 VRDI接通时,在 PRDY输出前伺服报警。
附表 20为数字伺服每个轴的参数。
附表 20 数字伺服每个轴的参数
8500 参数号 轴 8500 参数号 轴 第 1轴 8100~8165 X轴 第 3轴 8300~8365 轴 CF轴,PMC轴 第 2轴 8200~8265 Z轴 第 4轴 8400~8465 Y轴,PMC轴
以下各参数中,每个轴的参数号由下列表示:
8□00 7 6 5 4 3 2 1 0
DGPRM
DGPRM 通电后,与数字伺服相关的参数的标准值。
1:不设定。
0:设定。
电动机的形式确定后,本参数设为 0,则通入电源时,与参数 8□20的电动机形式相称的值被自动地设
入参数中,同时本参数变成“1”。
8□01 AMR5 ARM4 ARM3 ARM2 ARM1 ARM0
7 6 5 4 3 2 1 0
对就电动机型号参数设置见附表 21。
附表 21 对应电动机型号参数设置
AMRS~AMRO 电动机型号
脉冲编码器每
转脉冲数 5 4 3 2 1 0 2000 0 1 1 1 1 1 2500 0 1 1 0 1 0
2—0,1—0,0,5 10,20,20M,
30,30R 3000 0 1 0 0 0 1 4—0,3—0 2000 0 1 0 1 0 1
5—0 1000 0 1 0 0 0 0

12500 0 0 0 0 0 1 20000 1 1 1 1 1 1
2—0,1—0,0,5 10,20,20M
30,30R 25000 1 1 1 0 1 0
8□02 7 6 5 4 3 2 1 0
VFSEL PSSEL
设定值固定如下,请勿变更。
VFSEL=0
PSSEL=1
8□20 电动机形式
参数输入
数据形式:字轴形。
数据单位:
数据范围:0~32767
在 NC存储器内,存有各种电动机形式与数字伺服有关的参数标准值。
通过本参数的设定可确定选择哪种数据,按各轴设定,本参数在 0型电动机以下,或设定了没有给出的
电动机形式时会发出报警。
电动机形式 参数号
5—0 4—0 3—0 2—0 1—0 8□20 3 4 5 6 7
电动机形式
参数号 0 5 10 20M 20
8□20 8 9 10 11 12
电动机形式 参数号
30 30R 8□20 13 14
8□21 负载惯量比 参数输入
数据形式:字轴形。 数据单位: 数据范围:1~32767 使用数字伺服的场合,用下式计算负载与电动机转子的惯性比。

按各轴设定:负载惯性比= 256*转子惯量
负载惯量
8□22 电动机旋转方向(DIRCTL) 参数输入
数据形式:字轴形。 设定电动机的旋转方向 +111:正方向(电动机轴侧看 CCW方向转) -111:负方向(电动机轴侧看 CCW方向转)
8□23 与数字伺服相关(PULCO) 参数输入
数据形式:字轴形。 数据单位:PULSE/REV 数据范围:0~32767 使用数字伺服的场合,按各轴设定用于位置反馈的检测器相应于电动机一转的脉冲数,以 A相 B相每
个期中 4个脉搏冲计数脉冲数。但使用 0.1μ脉冲编码器时,按 1/10设定数据。 此参数值小于 0时,发出报警。
8□24 与数字伺服相关(PPLS) 参数输入
数据形式:字轴形。 数据单位:PULSE/REV 数据范围:1~32767 使用数字伺服的场合,按各轴设定用于位置反馈的检测器相应于电动机一转的脉冲数,以 A相 B相每
个期中 4个脉搏冲计数脉冲数。但使用 0.1μ脉冲编码器时,按 1/10设定数据。 此参数值小于 0时,发出报警。
8□40 与数字伺服有关
8□65 参数输入 数据形式:字轴形。 数据单位 数据范围
注:令 PRM8□00第一位(DGPRM)=0,在 PRM8□20中输入了电动机形式后,通电时,标准值自动
地设入参数中通学没有变更的必要。