Embed Size (px)
Citation preview
First-Order Systems
Chapter IIITransient and Steady-State Response Analysis
2
Dynamic Response
3
Introduction
Typical test signalTransient response and Steady-state responseAbsolute stability, relative stability Steady-state error
4
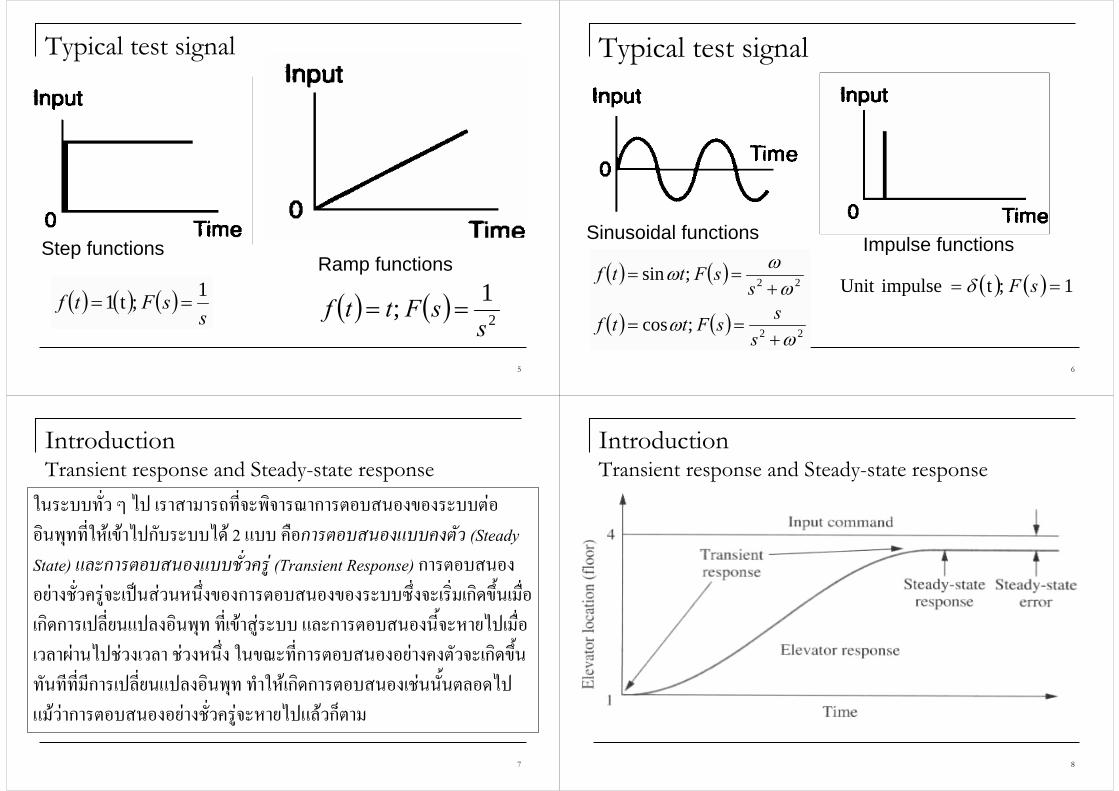
IntroductionTypical test signal
Step functionsRamp functionsAcceleration functionsImpulse functionsSinusoidal functionsWhite noise signals
5
Typical test signal
( ) ( ) ( )s
sFtf 1 ;t1 ==
Step functionsRamp functions
( ) ( ) 2
1 ;s
sFttf ==
6
Typical test signal
( ) ( )
( ) ( ) 22
22
;cos
;sin
ωω
ωωω
+==
+==
sssFttf
ssFttf
Sinusoidal functions Impulse functions
( ) ( ) 1 ;timpulseUnit == sFδ
7
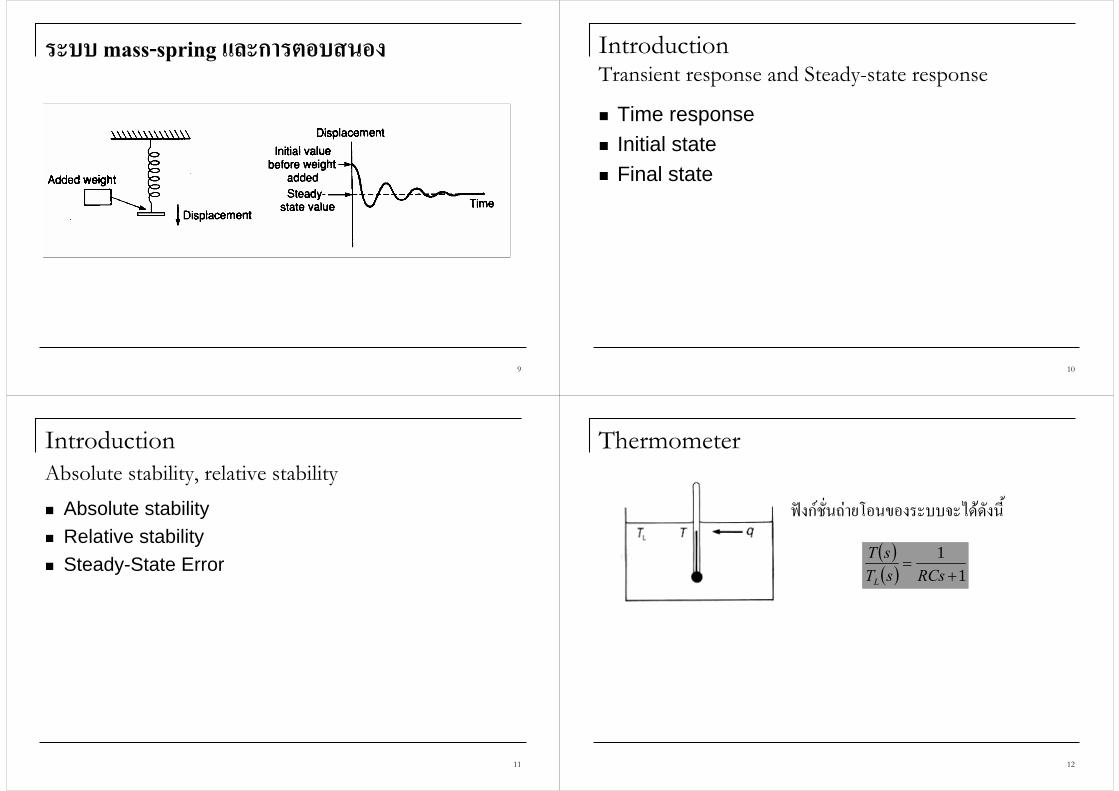
Introduction Transient response and Steady-state response
ในระบบทั่ว ๆ ไป เราสามารถที่จะพิจารณาการตอบสนองของระบบตออินพทุที่ใหเขาไปกบัระบบได 2 แบบ คือการตอบสนองแบบคงตัว (Steady State) และการตอบสนองแบบชั่วครู (Transient Response) การตอบสนองอยางชั่วครูจะเปนสวนหนึง่ของการตอบสนองของระบบซึ่งจะเริ่มเกิดขึ้นเมือ่เกิดการเปลี่ยนแปลงอินพุท ที่เขาสูระบบ และการตอบสนองนี้จะหายไปเมือ่เวลาผานไปชวงเวลา ชวงหนึ่ง ในขณะที่การตอบสนองอยางคงตัวจะเกิดขึน้ทันททีี่มีการเปลี่ยนแปลงอินพุท ทําใหเกิดการตอบสนองเชนนัน้ตลอดไปแมวาการตอบสนองอยางชั่วครูจะหายไปแลวกต็าม
8
Introduction Transient response and Steady-state response
9
ระบบ mass-spring และการตอบสนอง
10
Introduction Transient response and Steady-state response
Time responseInitial stateFinal state
11
Introduction Absolute stability, relative stability
Absolute stabilityRelative stabilitySteady-State Error
12
Thermometer
( )( ) 1
1+
=RCssT
sTL
ฟงกชั่นถายโอนของระบบจะไดดังนี้
13
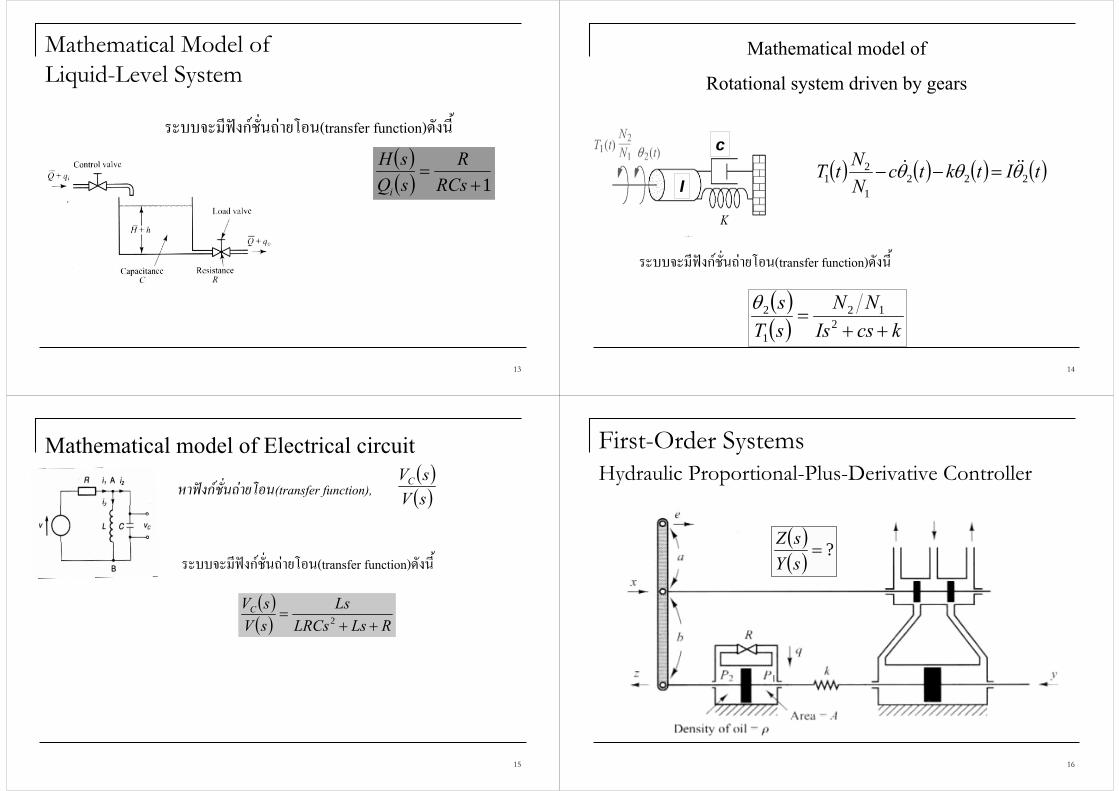
Mathematical Model of Liquid-Level System
( )( ) 1+
=RCsR
sQsH
i
ระบบจะมีฟงกชั่นถายโอน(transfer function)ดังนี้
14
Mathematical model of Rotational system driven by gears
( ) ( ) ( ) ( )tItktcNNtT 222
1
21 θθθ =−−
ระบบจะมีฟงกชั่นถายโอน(transfer function)ดังนี้
( )( ) kcsIs
NNsTs
++= 2
12
1
2θ
I
c
15
Mathematical model of Electrical circuit( )( )sVsVCหาฟงกชั่นถายโอน(transfer function),
ระบบจะมีฟงกชั่นถายโอน(transfer function)ดังนี้
( )( ) RLsLRCs
LssVsVC
++= 2
16
First-Order SystemsHydraulic Proportional-Plus-Derivative Controller
( )( ) ?=sYsZ
17
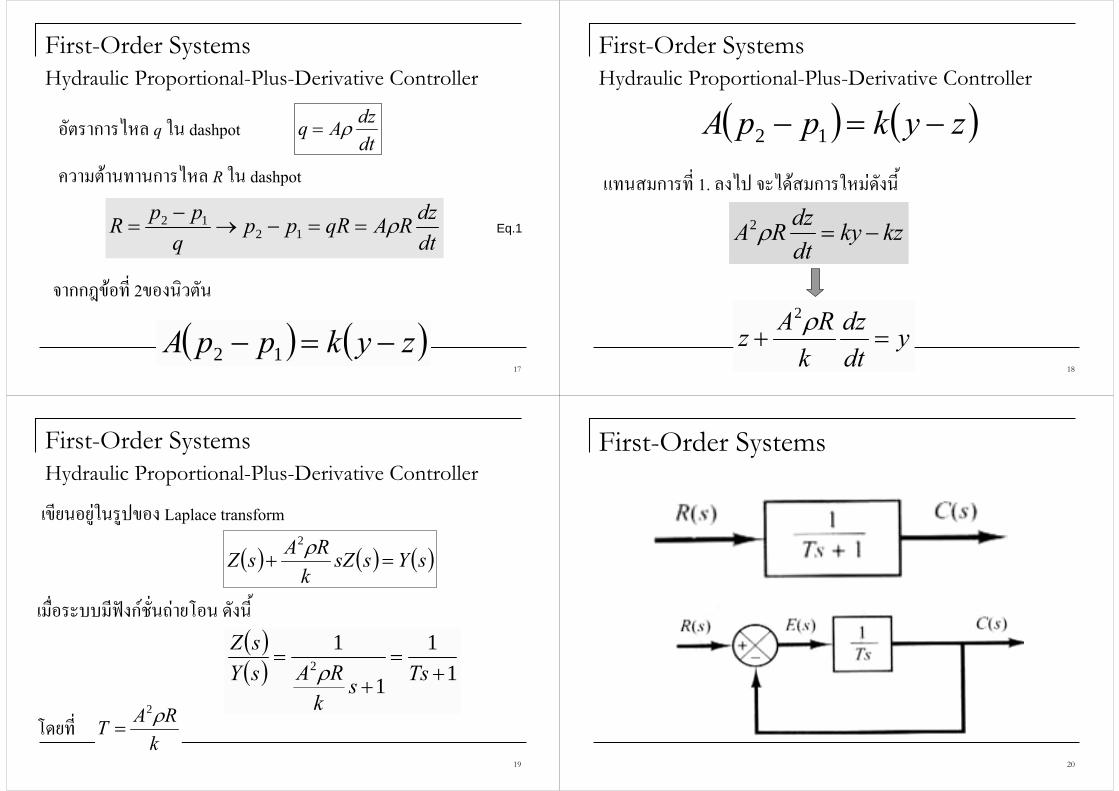
First-Order SystemsHydraulic Proportional-Plus-Derivative Controller
dtdzRAqRpp
qppR ρ==−→
−= 12
12
dtdzAq ρ=
( ) ( )zykppA −=− 12
อัตราการไหล q ใน dashpot
ความตานทานการไหล R ใน dashpot
จากกฎขอที่ 2ของนิวตนั
Eq.1
18
First-Order SystemsHydraulic Proportional-Plus-Derivative Controller
( ) ( )zykppA −=− 12
kzkydtdzRA −=ρ2
ydtdz
kRAz =+ρ2
แทนสมการที่ 1. ลงไป จะไดสมการใหมดังนี้
19
First-Order SystemsHydraulic Proportional-Plus-Derivative Controller
( )( ) 1
1
1
12 +
=+
=Tss
kRAsY
sZρ
( ) ( ) ( )sYssZkRAsZ =+ρ2
kRAT ρ2
=
เมือ่ระบบมีฟงกชั่นถายโอน ดงันี้
เขียนอยูในรูปของ Laplace transform
โดยที่20
First-Order Systems
21
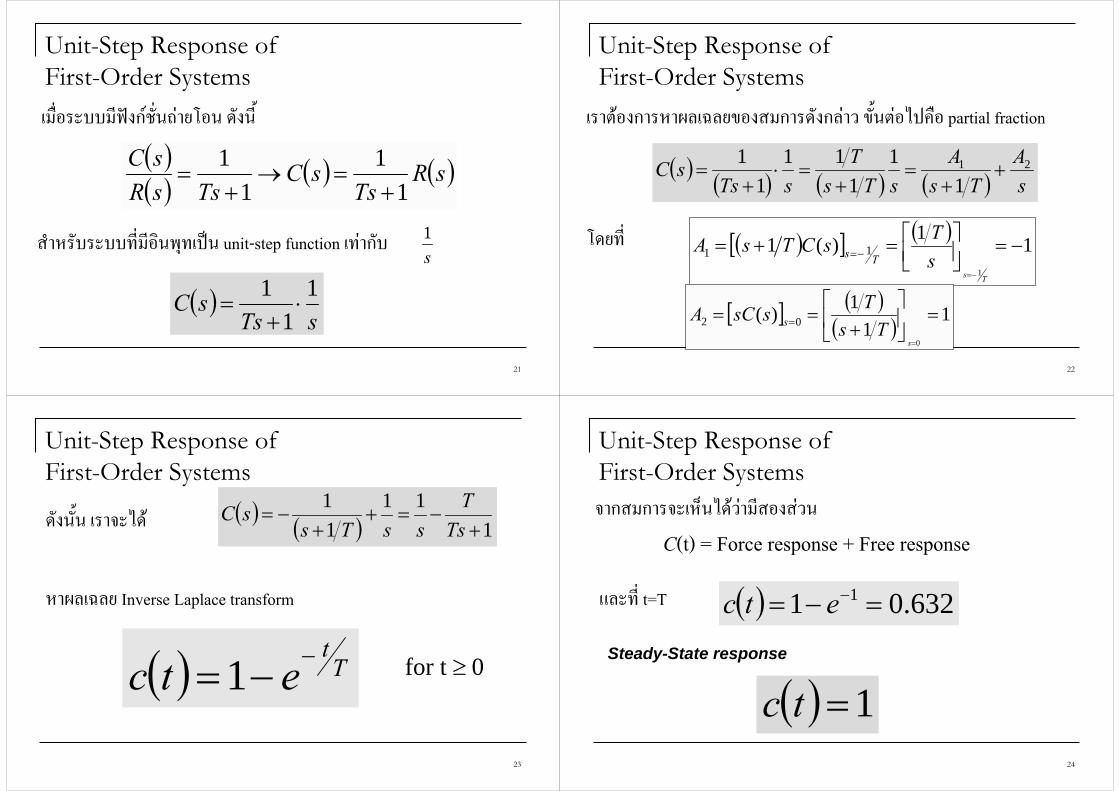
Unit-Step Response of First-Order Systems
( )( ) ( ) ( )sR
TssC
TssRsC
11
11
+=→
+=
s1
เมือ่ระบบมีฟงกชั่นถายโอน ดงันี้
สําหรับระบบที่มีอินพุทเปน unit-step function เทากบั
( )sTs
sC 11
1⋅
+=
22
Unit-Step Response of First-Order Systems
( ) ( ) ( ) ( ) sA
TsA
sTsT
sTssC 21
11
111
11
++
=+
=⋅+
=
( )[ ] ( ) 11)(11
11 −=⎥⎦⎤
⎢⎣⎡=+=
−=
−=
TssTsCTsA
Ts
เราตองการหาผลเฉลยของสมการดังกลาว ขั้นตอไปคือ partial fraction
[ ] ( )( ) 1
11)(
0
02 =⎥⎦
⎤⎢⎣
⎡+
===
=
sTsTssCA s
โดยที่
23
Unit-Step Response of First-Order Systems
( ) ( ) 111
11
+−=+
+−=
TsT
ssTssC
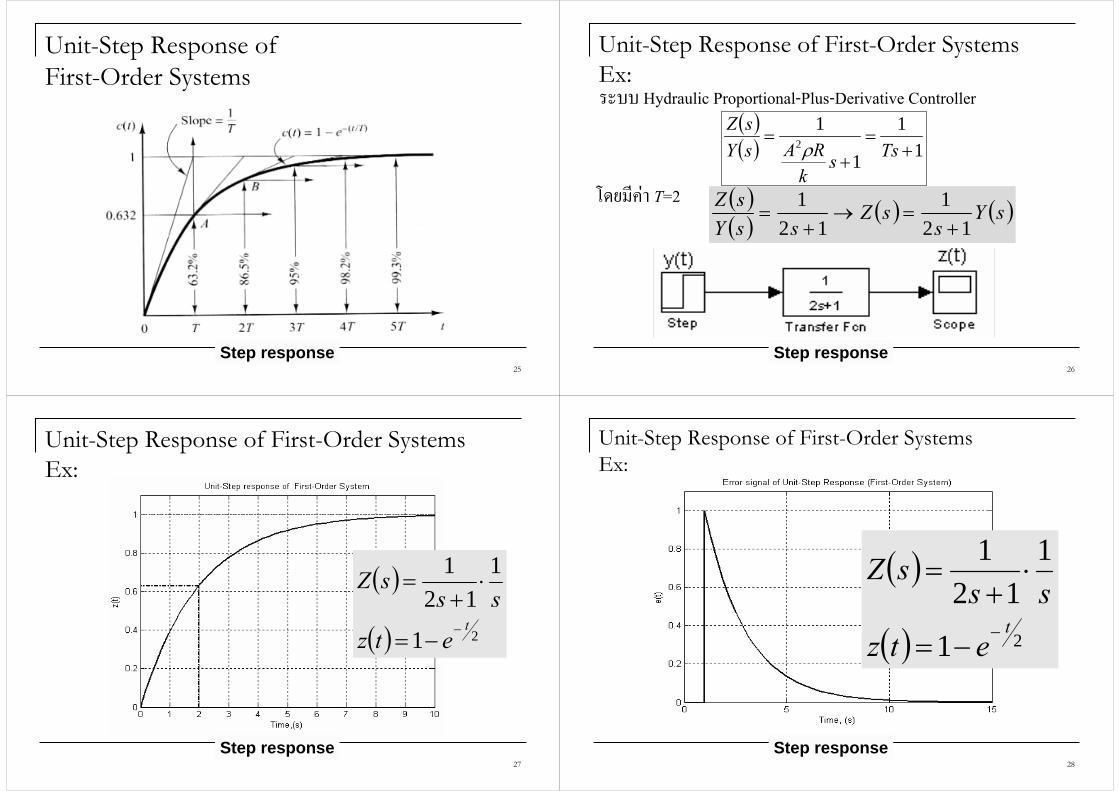
( ) Tt
etc −−=1
ดังนัน้ เราจะได
หาผลเฉลย Inverse Laplace transform
0for t ≥
24
Unit-Step Response of First-Order Systems
( ) 632.01 1 =−= −etcและที่ t=T
C(t) = Force response + Free response จากสมการจะเหน็ไดวามีสองสวน
Steady-State response
( ) 1=tc
25
Unit-Step Response of First-Order Systems
Step response26
Unit-Step Response of First-Order SystemsEx:
( )( ) 1
1
1
12 +
=+
=Tss
kRAsY
sZρ
( )( ) ( ) ( )sY
ssZ
ssYsZ
121
121
+=→
+=
Step response
ระบบ Hydraulic Proportional-Plus-Derivative Controller
โดยมีคา T=2
27
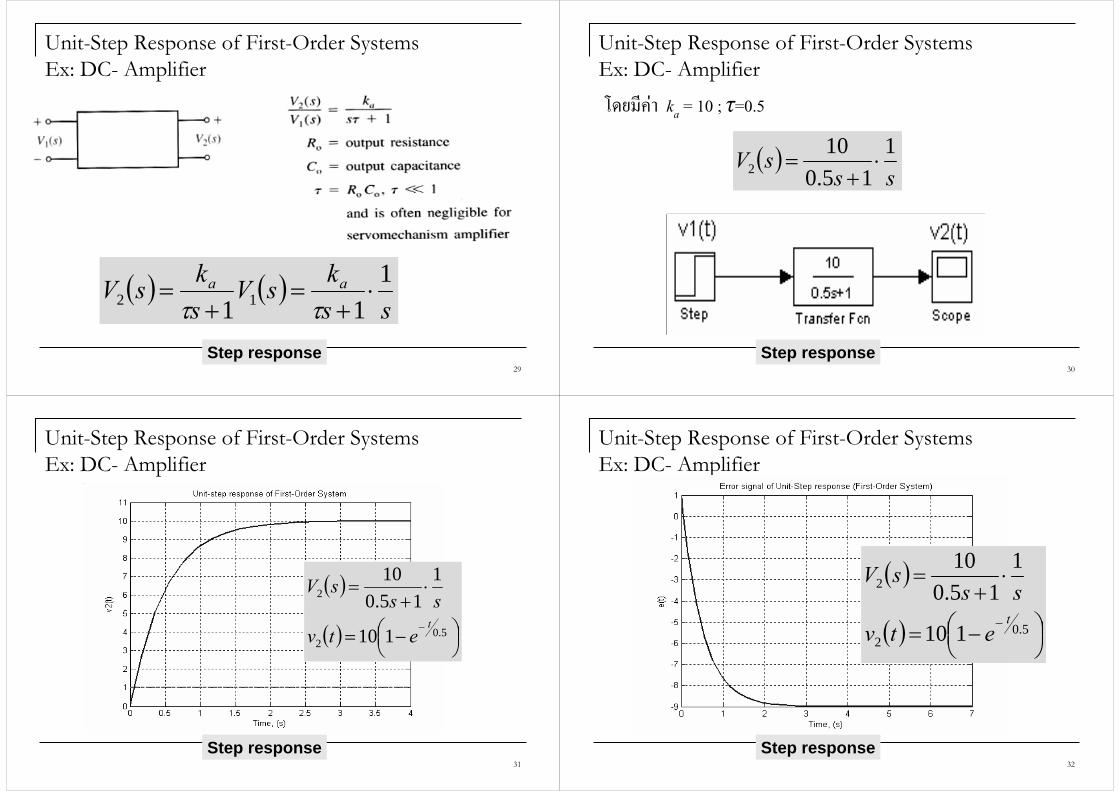
Unit-Step Response of First-Order SystemsEx:
Step response
( )
( ) 21
112
1
tetz
sssZ
−−=
⋅+
=
28
Unit-Step Response of First-Order SystemsEx:
Step response
( )
( ) 21
112
1
tetz
sssZ
−−=
⋅+
=
29
Unit-Step Response of First-Order SystemsEx: DC- Amplifier
Step response
( ) ( )ss
ksVsksV aa 1
11 12 ⋅+
=+
=ττ
30
Unit-Step Response of First-Order SystemsEx: DC- Amplifier
( )ss
sV 115.0
102 ⋅
+=
โดยมีคา ka = 10 ; τ=0.5
Step response
31
Unit-Step Response of First-Order SystemsEx: DC- Amplifier
Step response
( )
( ) ⎟⎠⎞⎜
⎝⎛ −=
⋅+
=
− 5.02
2
110
115.0
10
tetv
sssV
32
Unit-Step Response of First-Order SystemsEx: DC- Amplifier
Step response
( )
( ) ⎟⎠⎞⎜
⎝⎛ −=
⋅+
=
− 5.02
2
110
115.0
10
tetv
sssV
33
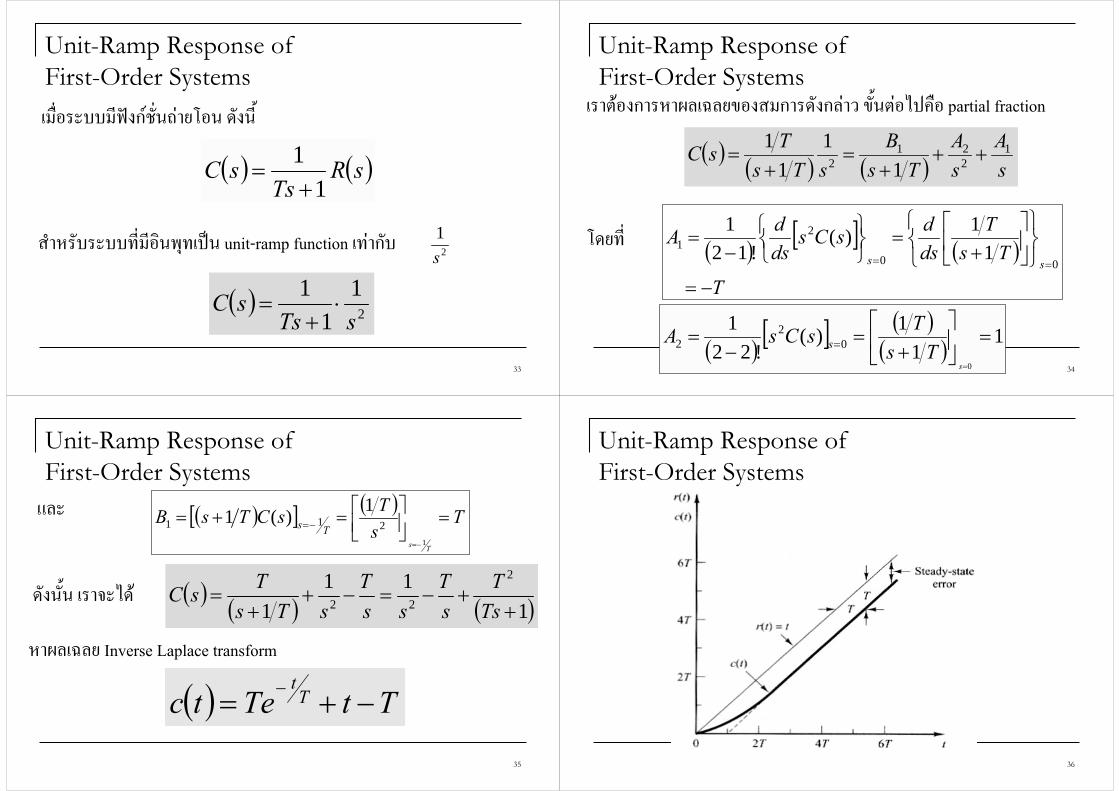
Unit-Ramp Response of First-Order Systems
( ) ( )sRTs
sC1
1+
=
2
1s
เมือ่ระบบมีฟงกชั่นถายโอน ดงันี้
สําหรับระบบที่มีอินพุทเปน unit-ramp function เทากบั
( ) 2
11
1sTs
sC ⋅+
=
34
Unit-Ramp Response of First-Order Systems
( ) ( ) ( ) sA
sA
TsB
sTsTsC 1
221
2 11
11
+++
=+
=
( ) [ ] ( )T
TsT
dsdsCs
dsdA
ss
−=⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡+
=⎭⎬⎫
⎩⎨⎧
−=
==
11)(
!121
00
21
เราตองการหาผลเฉลยของสมการดังกลาว ขั้นตอไปคือ partial fraction
( ) [ ] ( )( ) 1
11)(
!221
0
02
2 =⎥⎦
⎤⎢⎣
⎡+
=−
==
=
sTsTsCsA s
โดยที่
35
Unit-Ramp Response of First-Order Systems
( )[ ] ( ) TsTsCTsB
Ts
Ts =⎥⎦⎤
⎢⎣⎡=+=
−=
−=1
2111)(1
( ) ( ) ( )111
1
2
22 ++−=−+
+=
TsT
sT
ssT
sTsTsCดังนัน้ เราจะได
( ) TtTetc Tt
−+=−
หาผลเฉลย Inverse Laplace transform
และ
36
Unit-Ramp Response of First-Order Systems
37
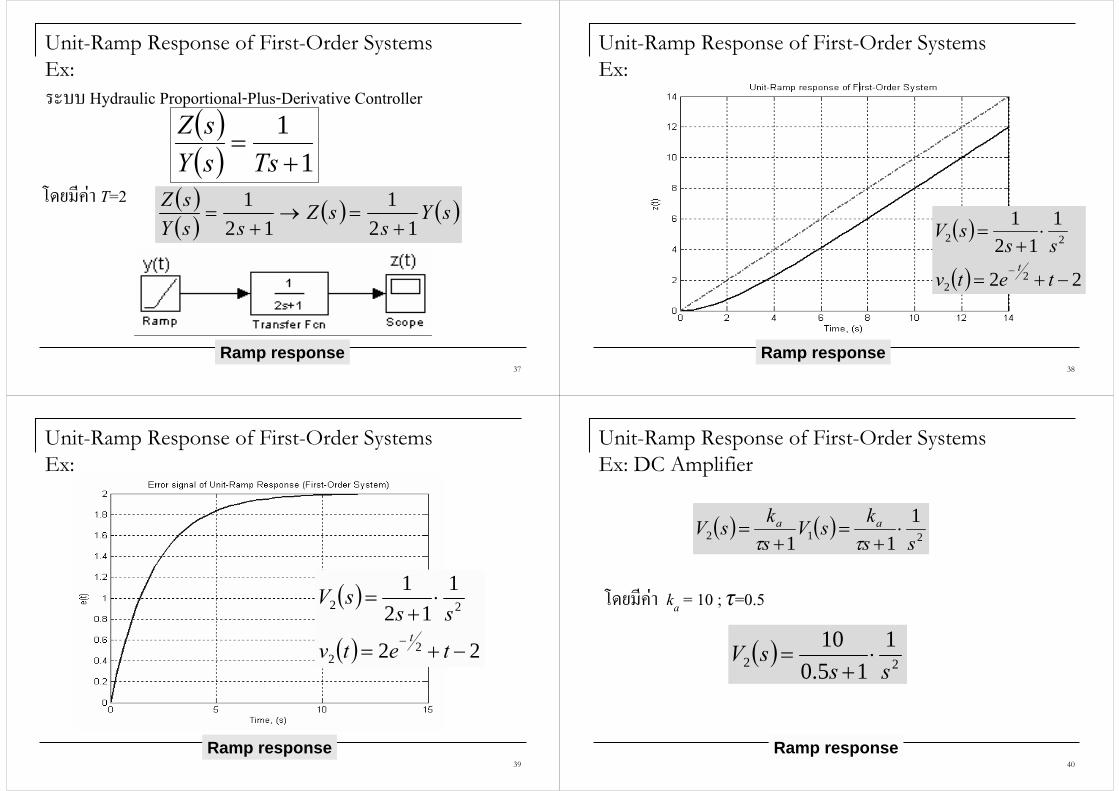
Unit-Ramp Response of First-Order SystemsEx:
( )( ) 1
1+
=TssY
sZ
( )( ) ( ) ( )sY
ssZ
ssYsZ
121
121
+=→
+=
Ramp response
ระบบ Hydraulic Proportional-Plus-Derivative Controller
โดยมีคา T=2
38
Unit-Ramp Response of First-Order SystemsEx:
Ramp response
( )
( ) 22
112
1
22
22
−+=
⋅+
=
− tetv
sssV
t
39
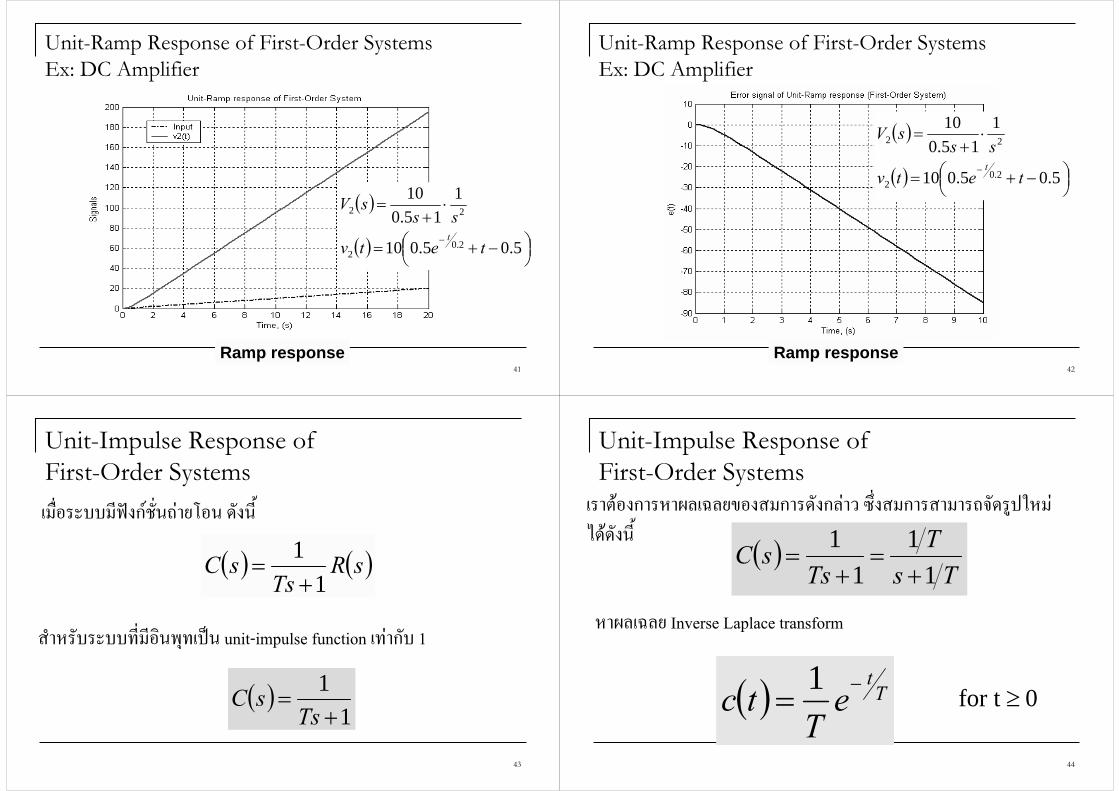
Unit-Ramp Response of First-Order SystemsEx:
Ramp response
( )
( ) 22
112
1
22
22
−+=
⋅+
=
− tetv
sssV
t
40
Unit-Ramp Response of First-Order SystemsEx: DC Amplifier
Ramp response
( ) ( ) 2121
11 ssksV
sksV aa ⋅
+=
+=
ττ
( ) 221
15.010
sssV ⋅
+=
โดยมีคา ka = 10 ; τ=0.5
41
Unit-Ramp Response of First-Order SystemsEx: DC Amplifier
Ramp response
( )
( ) ⎟⎠⎞⎜
⎝⎛ −+=
⋅+
=
− 5.05.010
115.0
10
2.02
22
tetv
sssV
t
42
Unit-Ramp Response of First-Order SystemsEx: DC Amplifier
Ramp response
( )
( ) ⎟⎠⎞⎜
⎝⎛ −+=
⋅+
=
− 5.05.010
115.0
10
2.02
22
tetv
sssV
t
43
Unit-Impulse Response of First-Order Systems
( ) ( )sRTs
sC1
1+
=
เมือ่ระบบมีฟงกชั่นถายโอน ดงันี้
สําหรับระบบที่มีอินพุทเปน unit-impulse function เทากับ 1
( )1
1+
=Ts
sC
44
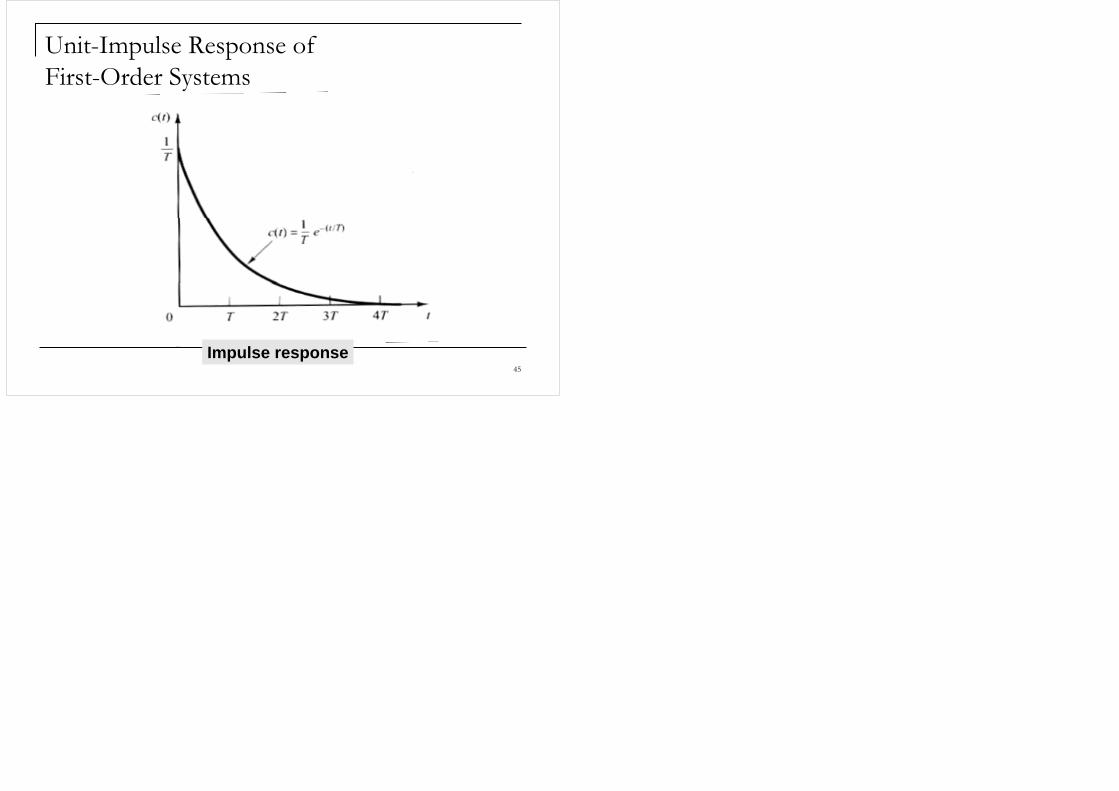
Unit-Impulse Response of First-Order Systems
( )TsT
TssC
11
11
+=
+=
เราตองการหาผลเฉลยของสมการดังกลาว ซึ่งสมการสามารถจัดรูปใหมไดดังนี้
หาผลเฉลย Inverse Laplace transform
( ) Tt
eT
tc −=1
0for t ≥
45
Unit-Impulse Response of First-Order Systems
Impulse response





















