Embed Size (px)
Citation preview
Geometriehttps://www.mi.fu-berlin.de/kvv/course.htm?sid=22&iid=2&cid=9923
— vorlaufiges Skript (ohne Garantie) —— Ich bin dankbar fur Hinweise auf Fehler, Korrekturen, Verbesserungsvorschlage, etc. —
— Version vom 6. Juli 2012 —
Prof. Gunter M. ZieglerFachbereich Mathematik und Informatik
FU Berlin, 14195 Berlin
Tel. 030 838 75 668
http://page.mi.fu-berlin.de/gmziegler/
FU Berlin, Sommersemester 2012
Diese Vorlesung fur das Bachelorstudium soll als naturliche Fortsetzung von Lineare Algebra I und IIFundamente legen fur Vorlesungen/Zyklen wie Diskrete Geometrie, Algebraische Geometrie und Diffe-renzialgeometrie.Sie behandelt grundlegende Modelle der Geometrie, insbesondere– euklidische, affine, spharische, projektive und hyperbolische Geometrie, Mobiusgeometrie, Polaritat
und Dualitat– Strukturgruppen, Messen (Langen, Winkel, Volumina), explizite Berechnungen und– Anwendungen, Beispiele sowie Illustrationsthemen.
Dabei werden weitere Bezuge hergestellt, zum Beispiel zur Funktionentheorie und zur Numerik.
[1] Michele Audin. Geometry. Universitext. Springer, Heidelberg Berlin, 2003.
[2] Marcel Berger. Geometry I. Universitext. Springer, Berlin Heidelberg, 1987.
[3] David A. Brannan, Matthew F. Esplen, and Jeremy J. Gray. Geometry. Cambridge University Press,Cambridge, 1999.
[4] Gerd Fischer. Analytische Geometrie. Vieweg, Wiesbaden, 2001. 7. Auflage.
[5] Gerd Fischer. Lineare Algebra. Vieweg+Teubner, Wiesbaden, 2010. 17. Auflage.
[6] Boris A. Springborn. Geometry I. Lecture Notes, TU Berlin/Berlin Mathematical School,2007/08, 59 pp., ftp://ftp.math.tu-berlin.de/pub/Lehre/GeometryI/WS07/geometry1_ws07.pdf.
1
Geometrie — FU Berlin Sommersemester 2012 — Skript, Version: 6. Juli 2012 — Gunter M. Ziegler
Vorbemerkungen
Dies ist eine “allgemeine” Geometrie-Vorlesung fur Bachelor-Studierende.Ich will dabei meine Begeisterung fur Geometrie vermitteln, interessante Beispiele, Strukturenund Effekte vorfuhren, insbesondere aber Werkzeuge fur die Arbeit mit geometrischen Struk-turen vermitteln, die dann in ganz unterschiedliche Richtungen hilfreich sein konnen, insbe-sondere fur Vorlesungszyklen wie “Diskrete Geometrie I–III” (den ich selber halten werde),Differentialgeometrie, Algebraische Geometrie, aber auch fur Vorlesungen wie Geometry Pro-cessing und Algorithmische Geometrie.
Hier kommt ein grober Zeitplan, den wir schrittweise anpassen werden:1. Was ist Geometrie? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13. April2. Euklidische Geometrie, I: Der Rn mit einem Skalarprodukt . . . . . . . . . . . . . . . . . .19. April3. Euklidische Geometrie, II: Euklidische Bewegungen . . . . . . . . . . . . . . . . . . . . . . . .20. April4. Euklidische Geometrie, III: Hochdimensionale Effekte . . . . . . . . . . . . . . . . (D.F.) 26. April5. Diskrete Gruppen, ebene Pflasterungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (D.F.) 27. April6. Kristalle, kristallographische Gruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (D.F.) 3. Mai7. Spiegelungen, regulare Polytope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (D.F.) 4. Mai8. Affine Geometrie, I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10. Mai9. Affine Geometrie, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11. Mai
—- Christi Himmelfahrt —10. Kegelschnitte und Quadriken, I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18. Mai11. Kegelschnitte und Quadriken, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24. Mai12. Kegelschnitte und Quadriken, III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25. Mai13. Kegelschnitte und Quadriken, IV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31. Mai14. Projektive Geometrie, I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Juni15. Projektive Geometrie, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Juni16. Projektive Geometrie, III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8. Juni17. Projektive Geometrie, IV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14. Juni18. Projektive Geometrie, V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15. Juni19. “Was ist eine Geometrie” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21. Juni20. Spharische und elliptische Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (D.F.) 22. Juni21. Spharische und elliptische Geometrie, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28. Juni22. Mobiusgeometrie, I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29. Juni23. Mobiusgeometrie, II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Juli24. Hyperbolische Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6. Juli25. Wiederholung / Ubersicht / Perspektiven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (D.F.) 12. Juli26. Abschlussklausur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (D.F.) 13. Juli
2
Geometrie — FU Berlin Sommersemester 2012 — Skript, Version: 6. Juli 2012 — Gunter M. Ziegler
0 Was ist Geometrie? Was ist eine Geometrie? Was soll Geo-metrie?
0.1 Begriff
Geo = Erde, Metrie = VermessungDurer 1525 “Messung, Messkunst”
0.2 Geschichte
“5000 Jahre Geometrie” (siehe [3]) in 7 Buchern:300 v.Chr. Euklid “Elemente”1525 Albrecht Durer “Unterweysung der Messung”1637 Rene Descartes “Discours de la Methode”1827 August Mobius “Barycentrischer Calkul”1872 Felix Klein “Erlanger Programm”1854 Bernhard Riemann “Uber die Hypothesen, die der Geometrie zugrunde liegen”1899 David Hilbert “Grundlagen der Geometrie”
0.3 Begriffe• Euklidische Geometrie• Projektive Geometrie• Hyperbolische Geometrie• Spharische Geometrie, Elliptische Geometrie• Mobiusgeometrie, Kreisgeometrie• Differenzialgeometrie, Riemann’sche Geometrie, . . . −→ [Ecker, Huisken]• Algebraische Geometrie, torische Geometrie, arithmetische G. . . . −→ [Altmann, N.N.]• Diskrete Geometrie, Polyedergeometrie, . . . −→ [Ziegler, . . . ]• Algorithmische Geometrie, Geometry Processing, . . . −→ [Rote, Polthier]• . . .• Darstellende Geometrie• Grundlagen der Geometrie• . . .• “anschauliche Geometrie” [2]• “unvergangliche Geometrie” [1]• . . .
3
0.4 Eine Geometrie
Beispiel: d-dimensionale Euklidische Geometrie (Rd mit starren Bewegungen, die Abstandeerhalten). Dort werden wir unter anderem die folgenden Daten sammeln/beweisen• Menge: Rd
• Gruppe: Eukl(d) ∼= Rn o O(n)– Dimension der Gruppe = Anzahl der Freiheitsgrade =
(d+12
)– Erzeuger: Spiegelungen an Hyperebene
• Invarianten: Abstande, Winkel, affine Raume, Kugeln/Spharen, . . .• Charakterisierung: Jede bijektive Abbildung, die Abstande erhalt, ist eine euklidische
Bewegung• Objekte: zum Beispiel Kugelpackungen, Gitter, regulare Polyeder, . . .
0.5 Problematische Begriffe
zu definieren/klaren/charakterisieren:• Dimension (u.a. Dimension einer Transformationsgruppe!)• Volumen (u.a. von Polyedern, Kugeln, etc. – braucht man Analysis dafur?)• Winkel
[1] Harold Scott Macdonald Coxeter. Unvergangliche Geometrie. Birkhauser, Basel, 1981. Ubersetzungder 2. Auflage von “Introduction to Geometry”, 1. Auflage 1963.
[2] David Hilbert and Stephan Cohn-Vossen. Anschauliche Geometrie. Springer-Verlag, Berlin Heidel-berg, 1932. Second edition 1996. English translation: Geometry and the Imagination, Chelsea Publ.,1952.
[3] Christoph J. Scriba and Peter Schreiber. 5000 Jahre Geometrie. Springer, Berlin Heidelberg, 2001.
4

Geometrie — FU Berlin Sommersemester 2012 — Skript, Version: 6. Juli 2012 — Gunter M. Ziegler
Vorlesung 19. April 2012
1 Euklidische Geometrie
1.1 Der Rn mit einem Skalarprodukt
1.1.1 Lineare und affine Unterraume
Modell: Rn reeller Vektorraum mit der Standardbasis e1, . . . , en und dem entsprechenden “eu-klidischen” Koordinatensystem.
Untervektorraume U ⊆ Rn der Dimension dimU , mit 0 ≤ dimU ≤ n.“Innere Beschreibung”:
U = span{v1, . . . , vr} = {λ1v1 + · · ·+ λrvr : λ1, . . . , λr ∈ R}, mit r ≥ dimU.
Hier gilt r = dimU wenn {v1, . . . , vr} linear unabhangig ist; in diesem Fall sind die λi Koor-dinaten fur U .“Außere Beschreibung”: durch ein homogenes lineares Gleichungssystem
U = {x ∈ Rn : Ax = 0}, mit A ∈ Rm×n, m ≥ n− dimU.
Hier hat A den Rang n − dimU , und es gilt m = n − dimU wenn die Zeilen von A linearunabhangig sind.
Affine Unterraume U ⊆ Rn der Dimension dimU , mit −1 ≤ dimU ≤ n, sind die Losungs-mengen von linearen Gleichungssystemen, wobei ∅ als affiner Unterraum der Dimension −1betrachtet wird.“Außere Beschreibung”: U = {x ∈ Rn : Ax = b}, mit A ∈ Rm×n, m ≥ n − dimU , b ∈ Rn
durch ein lineares Gleichungssystem. Wenn b nicht im Spaltenraum vonA liegt, dann ergibt diesU = ∅. Ansonsten ist b ein Punkt in U , A hat den Rang n − dimU , d.h. dimU = n − rankA,und es gilt m = n− dimU wenn die Zeilen von A linear unabhangig sind.“Innere Beschreibung”: U = b + span{v1, . . . , vr}, mit r ≥ dimU . Hier gilt r = dimU wenn{v1, . . . , vr} linear unabhangig sind. Jeder Basispunkt mit einer (geordneten) Basis liefert unsKoordinaten fur U . Symmetrischere Alternative: baryzentrische Koordinaten
U = {µ0u0 + · · ·+ µrur : µ0, . . . , µr ∈ R, µ0 + · · ·+ µr = 1},
wobei u0, . . . , ur affin erzeugen — zum Beispiel b, b + v1, . . . , b + vr. Die Punkte u0, . . . , ursind affin unabhangig wenn es keine nicht-triviale Abhangigkeit µ0u0 + · · · + µrur = 0 mitµ0 + · · ·+ µr = 0 gibt.
Unter anderem haben wir als affine Unterraume: Punkte, Geraden, Ebenen (Dimension 2), . . . ,Hyperebenen (Dimension n− 1). Ein affiner Unterraum hat keinen naturlichen Basispunkt.
5

1.1.2 Abstande
Standard-Skalarprodukt: 〈x, y〉 :=∑n
i=1 xiyi.Norm |x| :=
√〈x, x〉: Langenmessung
Metrik d(x, y) := |x − y| =√∑n
i=1(xi − yi)2: Abstand zwischen den durch x, y bestimmtenPunktenPolarisierung: Aus der Norm kann das Skalarprodukt rekonstruiert werden, da fur alle x, y ∈ Rd
|x+ y|2 = |x|2 + |y|2 + 2〈x, y〉.
Dreiecksungleichung: d(x, z) ≤ d(x, y) + d(y, z), mit Gleichheit nur wenn x, y, z in der richti-gen Reihenfolge auf einer (affinen) Geraden liegen.
1.1.3 Orthogonalitat
Zwei Vektoren x, y ∈ Rn sind orthogonal, wenn 〈x, y〉 = 0 gilt.Orthogonalisierung. Fur x, y ∈ Rn, x 6= 0 kann man y := y − 〈y,x〉
|x|2 x. Iteration dieses Sche-mas ergibt die Gram–Schmidt Orthogonalisierung. (Einfacheres Rechenschema, wenn man dieVektoren jeweils auf Lange 1 normiert.)Orthogonale Projektion eines Punkts x auf eine Hyperebene H = {x ∈ Rn : 〈a, x〉 = α}fur a 6= 0: der eindeutige Bildpunkt x ∈ H lasst sich auf unterschiedliche Weise beschreiben/charakterisieren.
Aufgabe 1. Fur eine Hyperebene H = {x ∈ Rn : 〈a, x〉 = α} mit a 6= 0 und einen Punktx ∈ Rd sind aquivalent:
(i) d(x, x) ist minimal fur x ∈ H(ii) 〈x− x, y − x〉 = 0 fur alle y ∈ H
(iii) x = x+ ta mit t ∈ R so dass x ∈ H(iv) x = x+ α−〈a,x〉
〈a,a〉 a
H
yx
x
a
6
1.1.4 Beispiele: Punktmengen mit wenigen Abstanden
Theorem 1.1. Im Rn gibt es n+ 1 Punkte, aber keine n+ 2 Punkte, die paarweise voneinanderdenselben Abstand haben.
Beweis (fur den ersten Teil der Aussage). Betrachte die Punktmenge e1, . . . , en, t(e1+ · · ·+en)(fur Abstand
√2). Das liefert eine quadratische Gleichung fur t, mit zwei Losungen fur t.
Aufgabe 2. Man beweise, dass k + 1 Punkte, die paarweise denselben Abstand 1 haben, affinunabhangig sind, also einen affinen Raum der Dimension k aufspannen.
Problem. Wie viele Punkte kann es im Rn geben, zwischen denen nur zwei verschiedeneAbstande auftreten? — nicht vollstandig gelost!
Beispiel 1.2. Zwischen den(d2
)Punkten ei + ej ∈ Rd (1 ≤ i < j ≤ d) gibt es nur zwei
verschiedene Abstande.
Aufgabe 3. Man beschreibe explizit(d+12
)Punkte im Rd (oder
(d2
)Punkte im Rd−1), zwischen
denen es nur zwei verschiedene Abstande gibt.
Aufgabe 4. (*) Zwischen n Punkten in der Ebene R2 kann der großte Abstand hochstens n malauftreten. (Hopf & Pannwitz, siehe [7])
1.1.5 Spharen und Balle
Sphare Sn−1 := {x ∈ Rn : |x| = 1}, bzw. S(x0, r) := {x ∈ Rn : |x − x0| = r} fur x0 ∈ Rn,r > 0.Ball Bn := {x ∈ Rn : |x| ≤ 1}, bzw. B(x0, r) := {x ∈ Rn : |x− x0| ≤ r}.
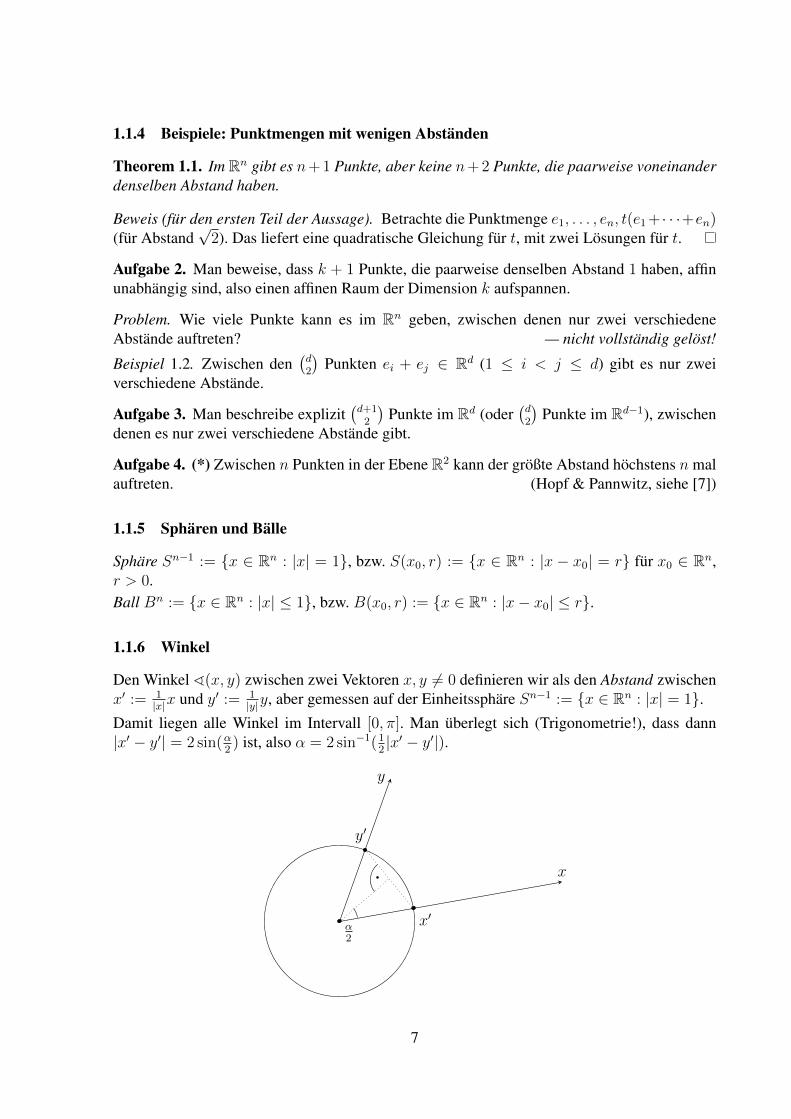
1.1.6 Winkel
Den Winkel ^(x, y) zwischen zwei Vektoren x, y 6= 0 definieren wir als den Abstand zwischenx′ := 1
|x|x und y′ := 1|y|y, aber gemessen auf der Einheitssphare Sn−1 := {x ∈ Rn : |x| = 1}.
Damit liegen alle Winkel im Intervall [0, π]. Man uberlegt sich (Trigonometrie!), dass dann|x′ − y′| = 2 sin(α
2) ist, also α = 2 sin−1(1
2|x′ − y′|).
α2
x
y
x′
y′
7

20. April 2012
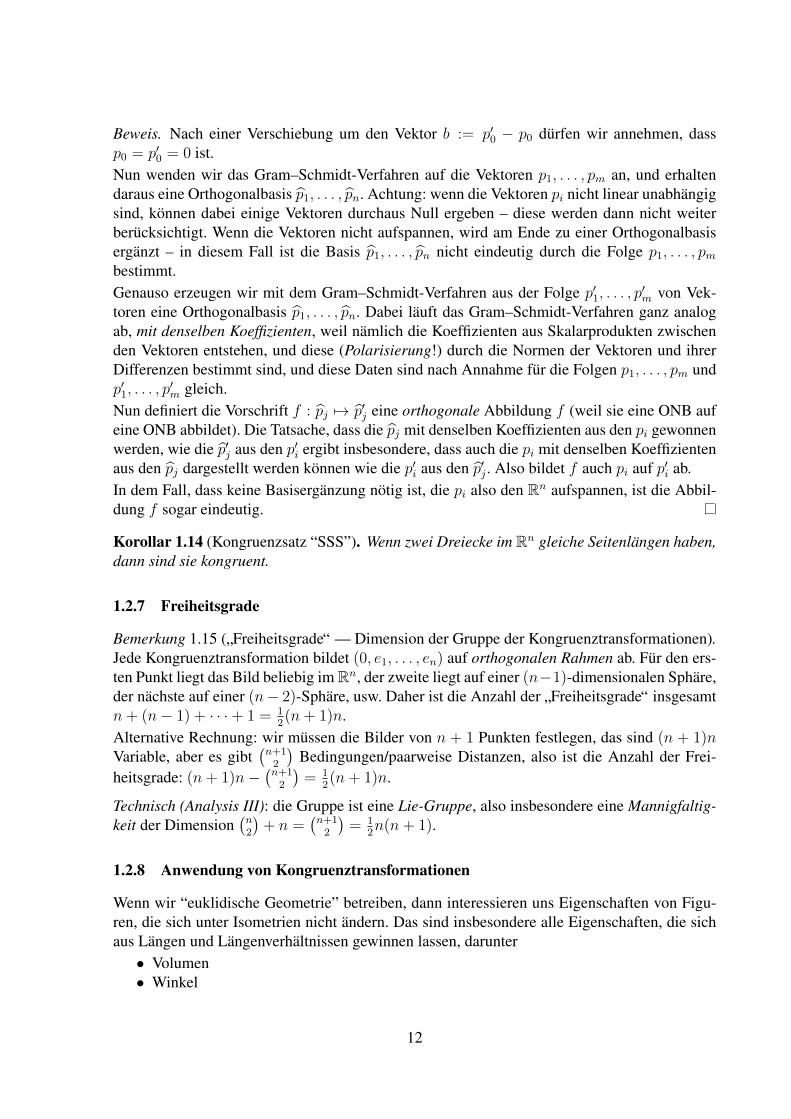
Oder man uberlegt sich (Gram–Schmidt Orthogonalisierung! Zeichnung!), dass fur x′′ := 〈x,y〉〈x,x〉x
das Dreieck 0x′′y rechtwinklig ist — und deshalb cosα = |x′′||y| = 〈x,y〉
|x||y| .
x
y
x′′α
Das liefert〈x, y〉 =: |x||y| cosα.
Lemma 1.3 (Winkel sind additiv. Dreiecksungleichung fur Winkel!). Fur Vektoren x, y, z 6= 0gilt
^(x, z) ≤ ^(x, y) + ^(y, z),
mit Gleichheit nur wenn x, y, z linear abhangig sind, mit y “zwischen” x und z.
Beweis. Dreiecksungleichung auf der Sphare.
1.1.7 Volumen
Volumen kann man fur “geeignete” Teilmengen A ⊆ Rn unterschiedlich definieren:1. elementar: Zerschneiden und Zusammensetzen (Isometrien)2. mit Hilfe der Determinantenfunktion (fur Wurfel, Spate, etc.)3. Riemann’sches Volumen: mit kleinen Wurfelchen ausschopfen (vgl. Analysis-Vorlesung).
Das fuhrt zu dem Riemann-Integral vol(A) :=∫A
1dx.Die Volumengleichheit z.B. von Parallelotopen, also Formeln von der Form
vol{λ1a1 + · · ·+ λnan : 0 ≤ λi ≤ 1} = | det(a1, . . . , an)|
folgen leicht mit Hilfe von Analysis-Methoden — aber lasst sich lasst sich Volumengleichheitvon Polyedern “elementar” durch Zerlegungsgleichheit in kongruente Stucke begrunden? Daswar “Hilberts drittes Problem”; es wurde von Dehn negativ gelost: Es gibt Tetraeder mit gleicherGrundflache und gleicher Hohe, die nicht “zerlegungsgleich” sind. Siehe [1, Kap. 9] [2].
8

1.2 Kongruenztransformationen
Definition 1.4 (Kongruenztransformationen). Eine Abbildung f : Rn → Rn heißt Kongruenz-transformation oder euklidische Abbildung oder Isometrie wenn sie Abstande erhalt, also
|f(x)− f(y)| = |x− y| fur alle x, y ∈ Rn.
Wir betrachten erst einmal Beispiele.
1.2.1 Translationen
Translationen: Ta : Rn → Rn, x 7→ x+ a.Die Translationen bilden eine abelsche Gruppe, die wir mit (Rn,+) identifizieren konnen.
1.2.2 Spiegelungen
Die Spiegelung von x an der Hyperebene H = {x ∈ Rn : 〈a, x〉 = α} mit a 6= 0 und α ∈ R:
SH : x 7−→ x+ 2α− 〈a, x〉〈a, a〉
a.
ist eine Kongruenztransformation. Sie ist auch eine Involution: doppelt spiegeln ergibt die Iden-titat, SH ◦ SH = id.Spiegelung an einem affinen Unterraum: Genauso!
1.2.3 Orthogonale Abbildungen
Proposition 1.5. Isometrien, die den Nullpunkt festhalten, sind orthogonale Abbildungen.Solche Abbildungen sind also insbesondere linear, und konnen also in der Form x 7→ Ax be-schrieben werden, mit orthogonaler Matrix A.
Beweis. Sei f : Rn → Rn Isometrie mit f(0) = 0. Dann gilt insbesondere |f(x)| = |x| fur allex, und deshalb 〈f(x), f(y)〉 = 〈x, y〉 wegen Polarisation:
〈x, y〉 = 12(|x|2 + |y|2 − |x− y|2).
Nun sei e1, . . . , en eine Orthonormalbasis (ONB), zum Beispiel die Standardbasis (wir setzenja das Standardskalarprodukt voraus). Dann gilt fur jeden Vektor
x =n∑i=1
〈x, ei〉ei,
und deshalb, weil auch f(e1), . . . , f(en) eine ONB ist, und weil f das Skalarprodukt erhalt,
f(x) =n∑i=1
〈f(x), f(ei)〉f(ei) =n∑i=1
〈x, ei〉f(ei).
Daran sieht man, dass f linear ist.
9

Lemma 1.6. Eine lineare Abbildung x 7→ Ax is genau dann orthogonal, wenn eine der folgen-den aquivalenten Bedingungen gilt:• sie eine Orthonormalbasis auf eine Orthonormalbasis abbildet,• sie jede Orthonormalbasis auf eine Orthonormalbasis abbildet,• die Spalten von A eine Orthonormalbasis bilden,• AtA = En,• die Zeilen von A eine Orthonormalbasis bilden.
26. April 2012
Jede orthogonale Abbildung hat Determinante +1 oder −1. Die orthogonalen Abbildungendes Rn (und damit die darstellenden Matrizen) bilden eine Gruppe, die orthogonale Gruppe
O(n) = {A ∈ Rn : AtA = En}.
Die orientierungserhaltenden orthogonalen Abbildungen bilden eine Untergruppe, die spezielleorthogonale Gruppe
SO(n) = {A ∈ Rn : AtA = En, detA = 1}.
Die Gruppe O(n) ist nicht kommutativ fur n ≥ 2, SO(n) ist nicht kommutativ fur n > 2.
Theorem 1.7 (Normalformsatz fur orthogonale Abbildungen). Fur jede orthogonale AbbildungRn → Rn gibt es eine Zerlegung des Rn in ein- und zweidimensionale invariante orthogonaleUnterraume, so dass– auf jedem der ein-dimensionalen invarianten Unterraumen ist die Abbildung die Identitat
oder ihr Negatives,– auf jedem der zwei-dimensionalen invarianten Unterraumen ist die Abbildung eine Drehung
um einen Winkel im Intervall ]0, π[.
Aquivalent dazu: fur jede orthogonale Matrix A ∈ O(n) gibt es S ∈ O(n) so dass S−1AS eineBlockdiagonalmatrix ist
S−1AS = diag(1, . . . , 1,−1, . . . ,−1, D(α1), . . . , D(αk))
mit Einsen, Minus-Einsen und 2× 2 Drehmatrizen zu Winkeln 0 < αi < π auf der Diagonale,
also D(α) =
(cosα − sinαsinα cosα
).
Lemma 1.8. Jede orthogonale Abbildung der Determinante +1 kann stetig (innerhalb derGruppe O(n)!) in die Identitat deformiert werden.Jede orthogonale Abbildung der Determinante −1 kann stetig in die Spiegelung s1 : x 7→x− 2x1e1 deformiert werden.
Korollar 1.9. Fur n ≥ 1 hat die Gruppe O(n) ⊆ Rn×n zwei Zusammenhangskomponenten,namlich die spezielle orthogonale Gruppe SO(n) und die Nebenklasse SO(n)s1 = {A ∈ Rn :AtA = En, detA = −1}.
Korollar 1.10. Jede orthogonale Abbildung des Rn kann aus hochstens n Spiegelungen anHyperebenen durch den Nullpunkt erzeugt werden. Im Allgemeinen reichen dafur jedoch n− 1Spiegelungen nicht aus.
10

1.2.4 Allgemeine Kongruenztransformationen
Die Gruppe der Isometrien des Rn (also der “euklidischen Bewegungen” oder “Kongruenz-transformationen”) enthalt einerseits die Untergruppe der Translationen — die wir mit Rn iden-tifizieren — andererseits die orthogonalen Abbildungen, also die Isometrien, die den Nullpunktfestlassen.Die Schnittmenge zwischen diesen beiden Untergruppen enthalt nur die Nullabbildung (dieeinzige Translation, die den Nullpunkt festlasst).Jede Isometrie f : Rn → Rn kann man als “orthogonale Abbildung gefolgt von einer Transla-tion” beschreiben, also als f : x 7→ Ax+ b fur A ∈ O(n) und b ∈ Rn. Dabei sind b = f(0) unddamit auch A durch f eindeutig festgelegt.
Theorem 1.11. Die volle Gruppe der euklidischen Bewegungen ist
Eukl(n) = {f : f(x) = Ax+ b fur ein A ∈ O(n), b ∈ Rn}.
Achtung: Trotzdem ist die Gruppe der euklidischen Bewegungen nicht einfach das ProduktRn × O(n), weil die Translationen und die orthogonalen Abbildungen nicht kommutieren. Siekann strukturell beschrieben werden als ein semidirektes Produkt “Rn o O(n)”, das gebildetwerden kann, weil die Gruppe der orthogonalen Abbildungen O(n) als eine Gruppe von Au-tomorphismen auf der Gruppe der Translationen (isomorph zu Rn) wirkt. (Siehe Fischer [3,Abschnitte I.3.4–I.3.6].) In dem semidirekten Produkt bilden die Translationen eine normaleUntergruppe: Jede Konjugation einer Translation x 7→ x+ a hat die Form
x 7→ S−1(((Sx+ b) + a)− b) = x+ S−1a,
ist also eine Translation.
1.2.5 Erzeugung durch Spiegelungen
Korollar 1.12. Jede Kongruenztransformation im Rn kann als Produkt von hochstens n + 1Spiegelungen an Hyperebenen dargestellt werden — von denen alle, bis auf moglicherweise dieletzte, Hyperebenen durch den Nullpunkt sind.Im Allgemeinen reichen dafur jedoch n Spiegelungen nicht aus.
Aufgabe 5. Wie sieht die letzte Spiegelung konkret aus? Man beweise damit die Aussage.(Korollar 1.10 darf benutzt werden.)
1.2.6 Hauptsatz der Euklidischen Geometrie
Theorem 1.13. Sind p0, . . . , pm und p′0, . . . , p′m Punkte im Rn mit
d(pi, pj) = d(p′i, p′j) fur alle i, j (0 ≤ i < j ≤ m),
so gibt es eine euklidische Transformation f : Rn → Rn, x 7→ Ax + b, mit A ∈ O(n) undb ∈ Rn, so dass f(pi) = p′i fur alle i gilt, 0 ≤ i ≤ m.Wenn die Punkte pi nicht alle auf einer Hyperebene liegen (was insbesondere m ≥ n erzwingt),dann ist diese euklidische Transformation eindeutig bestimmt.
11
Beweis. Nach einer Verschiebung um den Vektor b := p′0 − p0 durfen wir annehmen, dassp0 = p′0 = 0 ist.Nun wenden wir das Gram–Schmidt-Verfahren auf die Vektoren p1, . . . , pm an, und erhaltendaraus eine Orthogonalbasis p1, . . . , pn. Achtung: wenn die Vektoren pi nicht linear unabhangigsind, konnen dabei einige Vektoren durchaus Null ergeben – diese werden dann nicht weiterberucksichtigt. Wenn die Vektoren nicht aufspannen, wird am Ende zu einer Orthogonalbasiserganzt – in diesem Fall ist die Basis p1, . . . , pn nicht eindeutig durch die Folge p1, . . . , pmbestimmt.Genauso erzeugen wir mit dem Gram–Schmidt-Verfahren aus der Folge p′1, . . . , p
′m von Vek-
toren eine Orthogonalbasis p1, . . . , pn. Dabei lauft das Gram–Schmidt-Verfahren ganz analogab, mit denselben Koeffizienten, weil namlich die Koeffizienten aus Skalarprodukten zwischenden Vektoren entstehen, und diese (Polarisierung!) durch die Normen der Vektoren und ihrerDifferenzen bestimmt sind, und diese Daten sind nach Annahme fur die Folgen p1, . . . , pm undp′1, . . . , p
′m gleich.
Nun definiert die Vorschrift f : pj 7→ p′j eine orthogonale Abbildung f (weil sie eine ONB aufeine ONB abbildet). Die Tatsache, dass die pj mit denselben Koeffizienten aus den pi gewonnenwerden, wie die p′j aus den p′i ergibt insbesondere, dass auch die pi mit denselben Koeffizientenaus den pj dargestellt werden konnen wie die p′i aus den p′j . Also bildet f auch pi auf p′i ab.In dem Fall, dass keine Basiserganzung notig ist, die pi also den Rn aufspannen, ist die Abbil-dung f sogar eindeutig.
Korollar 1.14 (Kongruenzsatz “SSS”). Wenn zwei Dreiecke im Rn gleiche Seitenlangen haben,dann sind sie kongruent.
1.2.7 Freiheitsgrade
Bemerkung 1.15 (”Freiheitsgrade“ — Dimension der Gruppe der Kongruenztransformationen).Jede Kongruenztransformation bildet (0, e1, . . . , en) auf orthogonalen Rahmen ab. Fur den ers-ten Punkt liegt das Bild beliebig im Rn, der zweite liegt auf einer (n−1)-dimensionalen Sphare,der nachste auf einer (n− 2)-Sphare, usw. Daher ist die Anzahl der ”Freiheitsgrade“ insgesamtn+ (n− 1) + · · ·+ 1 = 1
2(n+ 1)n.
Alternative Rechnung: wir mussen die Bilder von n + 1 Punkten festlegen, das sind (n + 1)nVariable, aber es gibt
(n+12
)Bedingungen/paarweise Distanzen, also ist die Anzahl der Frei-
heitsgrade: (n+ 1)n−(n+12
)= 1
2(n+ 1)n.
Technisch (Analysis III): die Gruppe ist eine Lie-Gruppe, also insbesondere eine Mannigfaltig-keit der Dimension
(n2
)+ n =
(n+12
)= 1
2n(n+ 1).
1.2.8 Anwendung von Kongruenztransformationen
Wenn wir “euklidische Geometrie” betreiben, dann interessieren uns Eigenschaften von Figu-ren, die sich unter Isometrien nicht andern. Das sind insbesondere alle Eigenschaften, die sichaus Langen und Langenverhaltnissen gewinnen lassen, darunter• Volumen• Winkel
12
Dementsprechend definieren wir Winkel in einem Dreieck einfach dadurch, dass wir (nach einerIsometrie) annehmen, dass die betreffende Ecke im Nullpunkt liegt, und die daran anliegendenKanten eben Vektoren x, y sind.Notation: Im Dreieck ABC bezeichnen wir den Winkel zwischen
−→AB und
−→AC, also den “Win-
kel bei A”, mit α := ^BAC.
13
1.3 Hochdimensionale Effekte
1.3.1 Volumen von Kugel und Wurfel
Das Volumen der Kugel vom Radius 1
Vol(Bn) =πn/2
Γ(n2
+ 1)∼ πn/2
n2!∼(2πe
n
)n/2ist fur großes n (d.h. in hoher Dimension) verschwindend klein verglichen mit dem Volumen
Vol([−1, 1]n) = 2n.
Daher die Zeichnung (auf Anregung von Vitaly Milman, 1998), die die Sphare wie eine Amobezeigt?Wer einen zufalligen Punkt in der Einheitskugel konstruieren will, kann also nicht einfach Zu-fallswerte in [−1, 1]n nehmen . . .
1.3.2 Lange Diagonalen im Wurfel
Setzen wir 2n Balle vom Radius 1 an die Ecken des n-Wurfels [−1, 1]n, dann beruhren die sichgerade. Alle Balle sind in [−2, 2]n enthalten.Setzen wir noch einen moglichst großen Ball in den Mittelpunkt, so dass der die anderen Ballegerade beruhrt. Radius:
√n− 1.
Fur n > 4 ist der innere Ball großer als die außeren. Fur n > 9 ragt er sogar aus dem Wurfel[−2, 2]n heraus! (Siehe Matousek [5, Chap. 13])
Vorlesung 27. April 2012
1.3.3 Das Kusszahl-Problem
“Kusszahl”-Problem: Fur n = 3 konnen 12 Einheitskugeln eine gegebene Einheitskugel beruhren(siehe Aufgabe 5 unten), aber nicht mehr (Newton-Gregory Problem).Betrachten wir die Konfiguration im vorigen Abschnitt fur n = 4, dann ist ist der innere Balleine Einheitskugel, und genauso groß wie die außeren. Und man kann 8 weitere Balle an dieMittelpunkte ±2ei setzen, die die Eckballe nur beruhren — das gibt eine Konfiguration von 24Kugeln vom Radius 1, die gleichzeitig die Einheitskugel beruhren, ohne sich zu uberlappen.Diese 24er-Konfiguration ist in verschiedenster Hinsicht außergewohnlich; sie definiert ein 4-dimensionales regulares Polytop mit 24 Seitenflachen, die allesamt Oktaeder sind, und sie isthochsymmetrisch. Dieses “24-Zell” wurde von Ludwig Schlafli um 1850 entdeckt, als er dieregularen Polytope in Dimension n ≥ 4 klassifiziert hat. (Siehe z.B. Hilbert & Cohn-Vossen[4])Fur d = 4 ist die Zahl 24 von Beruhrkugeln maximal — das wurde von Musin 2008 bewiesen[6] [8]. Und man nimmt auch an, dass die Konfiguration eindeutig ist — das ist aber nichtbewiesen.Eine optimale Konfiguration kennt man auch fur n = 8 (240 Kugeln) und fur n = 24 (196 560),aber sonst fur keine Dimension n ≥ 5.
14
v
v
v
2
3
1
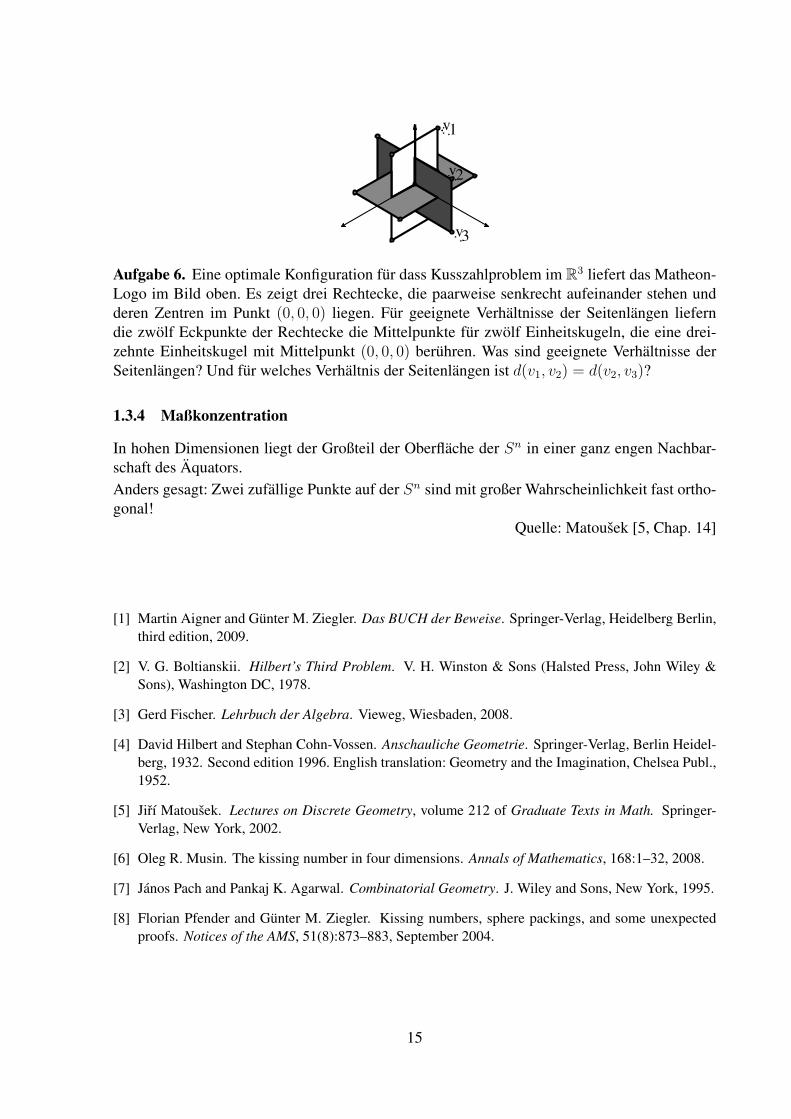
Aufgabe 6. Eine optimale Konfiguration fur dass Kusszahlproblem im R3 liefert das Matheon-Logo im Bild oben. Es zeigt drei Rechtecke, die paarweise senkrecht aufeinander stehen undderen Zentren im Punkt (0, 0, 0) liegen. Fur geeignete Verhaltnisse der Seitenlangen lieferndie zwolf Eckpunkte der Rechtecke die Mittelpunkte fur zwolf Einheitskugeln, die eine drei-zehnte Einheitskugel mit Mittelpunkt (0, 0, 0) beruhren. Was sind geeignete Verhaltnisse derSeitenlangen? Und fur welches Verhaltnis der Seitenlangen ist d(v1, v2) = d(v2, v3)?
1.3.4 Maßkonzentration
In hohen Dimensionen liegt der Großteil der Oberflache der Sn in einer ganz engen Nachbar-schaft des Aquators.Anders gesagt: Zwei zufallige Punkte auf der Sn sind mit großer Wahrscheinlichkeit fast ortho-gonal!
Quelle: Matousek [5, Chap. 14]
[1] Martin Aigner and Gunter M. Ziegler. Das BUCH der Beweise. Springer-Verlag, Heidelberg Berlin,third edition, 2009.
[2] V. G. Boltianskii. Hilbert’s Third Problem. V. H. Winston & Sons (Halsted Press, John Wiley &Sons), Washington DC, 1978.
[3] Gerd Fischer. Lehrbuch der Algebra. Vieweg, Wiesbaden, 2008.
[4] David Hilbert and Stephan Cohn-Vossen. Anschauliche Geometrie. Springer-Verlag, Berlin Heidel-berg, 1932. Second edition 1996. English translation: Geometry and the Imagination, Chelsea Publ.,1952.
[5] Jirı Matousek. Lectures on Discrete Geometry, volume 212 of Graduate Texts in Math. Springer-Verlag, New York, 2002.
[6] Oleg R. Musin. The kissing number in four dimensions. Annals of Mathematics, 168:1–32, 2008.
[7] Janos Pach and Pankaj K. Agarwal. Combinatorial Geometry. J. Wiley and Sons, New York, 1995.
[8] Florian Pfender and Gunter M. Ziegler. Kissing numbers, sphere packings, and some unexpectedproofs. Notices of the AMS, 51(8):873–883, September 2004.
15
2 Diskrete Bewegungsgruppen
Die volle Gruppe Eukl(n) der Euklidischen Bewegungen hat(n+12
)Freiheitsgrade, hat also
insbesondere uberabzahlbar viele Elemente. Dieses Kapitel behandelt endliche und abzahlbare(genauer: diskrete) Untergruppen von Eukl(n). Diese haben zum Einen eine schone Theorie,zum Anderen spielen sie eine zentrale Rolle in der Untersuchung regelmaßiger Muster (Mosa-ike, Ornamente . . . ), in der Kristallographie (die sich mit dem Aufbau von Kristallen wie Salz,Diamant, Stahl . . . befasst) und fur regulare Polytope (“Platonische Korper”).
2.1 Ebene Pflasterungen und kristallographische Gruppen
2.1.1 Endliche Untergruppen von Eukl(2)
Theorem 2.1. In einer endlichen Untergruppe G von Eukl(n) haben alle Elemente einen ge-meinsamen Fixpunkt.
Beweis. Wahle x ∈ Rn, und betrachte den G-Orbit G(x) von x, i.e. G(x) := {f(x) : f ∈ G}.Da G endlich ist, ist auch G(x) endlich. Sei m die Anzahl der Elemente in G(x). Fur ein g ∈ Ggilt
gG(x) = {g(f(x)) : f ∈ G} = G(x),
weil g ◦ f ∈ G und weil g eine Bijektion ist. Also gilt fur den Schwerpunkt s := 1m
∑y∈G(x)
von G(x) fur jedes g ∈ G:
g(s) = g( 1
m
∑y∈G(x)
y)
= A( 1
m
∑y∈G
y)
+ b = b+1
m
∑y∈G
Ay =
1
m
∑y∈G
(Ay + b) =1
m
∑y∈G
g(y) =1
m
∑z∈gG(x)
z =1
m
∑z∈G(x)
z = s.
Also ist der Schwerpunkt y der gemeinsame Fixpunkt.
Wir konnen OBdA den gemeinsamen Fixpunkt als 0 annehmen. Also konnen wir jede endlicheUntergruppe von Eukl(n) als Untergruppe von O(n) darstellen.Achtung: Das heißt nicht, dass jede endliche Untergruppe Untergruppe von O(n) ist. DieGruppe, die aus der Identitat sowie den Drehungen um 90◦, 180◦, 270◦ um das Drehzentrum(1, 0) ∈ R2 besteht, liegt nicht in O(2). Aber durch geeignetes Verschieben des Ursprungs er-halten wir eine Untergruppe von O(2). Daher konnen wir uns bei der Bestimmung der endlichenUntergruppen von Eukl(n) auf die endlichen Untergruppen von O(n) beschranken.(Wie sieht eine Drehung um den Punkt b aus, wenn A ∈ O(2) die entsprechende Drehung um 0ist?)Einige endliche Untergruppen der O(2) sind folgende.
Beispiel 2.2. Die zyklische Gruppe Cn enthalt die Drehungen um 2π/n, 4π/n, . . . sowie dieIdentitat. Als Matrizen (vgl Theorem 1.7): D(2π/n), D(4π/n), . . . D(0).Die Buchstaben N, S, Z haben als Symmetrie eine 180◦-Drehung sowie die Identitat. Ihre Sym-metriegruppe ist also C2. Der Rotor eines Windrads hat meistens die Symmetriegruppe C3.
16
Abstrakt konnen wir Cn schreiben alsD,D2, . . . , Dn = En (wobeiD furD(2π/n) steht. DieseGruppe hat einen Erzeuger: D, und eine Relation: Dn = 1 (wobei 1 fur das neutrale Elementder Gruppe steht).
Beispiel 2.3. Die Diedergruppe Dn enthalt die n Drehungen um 0, 2π/n, 4π/n, . . . sowie die nSpiegelungen S(0), S(2π/n), S(4π/n), . . . an den Geraden durch 0 mit Steigung 0, π/n, 2π/n . . ..Die Buchstaben A, M, V haben die Symmetriegruppe D1. Ein regulares n-Eck hat die Symme-triegruppe Dn.Abstrakt konnen wirDn schreiben mittels zweier ErzeugerD (Drehung um 2π/n) und S (Spie-gelung an der x-Achse) und den Relationen Dn = S2 = DSDS = 1.
Was wir hier mit “abstrakt” meinen: die durch die Erzeuger und Relationen dargestellte Grup-pe ist isomorph zu der Bewegungsgruppe. Als Bewegungsgruppen sind etwa C2 und D1 ver-schieden: C2 enthalt eine Drehung und keine Spiegelung, D2 enthalt keine Drehung und eineSpiegelung. Dennoch sind sie isomorph, als abstrakte Gruppen also gleich.
Korollar 2.4. Die endlichen Untergruppen von O(2) sind die zyklischen Gruppen Cn und dieDiedergruppen Dn.
2.1.2 Diskrete Untergruppen von Eukl(2)
Soviel zu den endlichen Untergruppen von Eukl(2). Die interessanten abzahlbaren Untergrup-pen von Eukl(2) (oder auch von Eukl(n)) sind die diskreten Bewegungsgruppen.
Definition 2.5 (Diskrete und kristallographische Untergruppen). Eine Gruppe G ⊂ Eukl(n)heißt diskret, wenn jeder G-Orbit aus isolierten Punkten besteht.Eine diskrete Untergruppe von Eukl(n) heißt kristallographisch, wenn sie n linear unabhangigeTranslationen enthalt.
Insbesondere sind alle endlichen Untergruppen von Eukl(n) auch diskrete Untergruppen. EinBeispiel einer nicht diskreten Gruppe ist die unendliche Gruppe {1, D(α), D(2α), . . .}, wobeiα kein rationales Vielfaches von π ist. Der G-Orbit eines Punktes unter dieser Gruppe bestehtaus einer abzahlbaren Punktmenge, die dicht auf einem Kreis liegt.
Lemma 2.6 (Kristallographische Beschrankung). Ist G ⊂ Eukl(n) eine kristallographischeGruppe (somit diskret), und ist f ∈ G eine orthogonale Abbildung, so treten als Drehwinkel inder Normalform (vgl Theorem 1.7) nur 2π/2, 2π/3, 2π/4 und 2π/6 auf.
Beweis. Wegen Theorem 1.7 reicht es, sich auf zweidimensionale Unterraume einzuschranken.Wir betrachten daher nur den Fall n = 2. Es sei P ein Drehzentrum mit Drehwinkel 2π/m.(Fur andere Winkel ist die Gruppe nicht diskret, s.o.) Die anderen Elemente von G bilden Pauf unendlich viele andere Drehzentren Q1, Q2, . . . ab. Sei Q eines, das minimalen Abstandzu P hat. Dann bildet die Drehung um P um den Winkel 2π/n das Drehzentrum Q auf dasDrehzentrum Q′ ab, und eine Drehung um den Winkel −2π/m bildet das Drehzentrum P aufdas Drehzentrum P ′ ab.
17

P Q
Q’ P’
P Q
Q’ P’
P Q
Q’ = P’
P Q
Q’ P’
Ist m = 6 so ist P ′ = Q′. Ist m ≥ 7, oder m = 5, so liegt P ′ naher an Q′ als P an Q, imWiderspruch zur Minimalitat des Abstands. Es bleiben nur n = 2, 3, 4 oder 6.
3. Mai 2012
2.2 Die kristallographischen Gruppen in der Ebene
2.2.1 Pflasterungen und Tapetengruppen
Ebene kristallographische Gruppen treten als Symmetriegruppen von periodischen ebenen (un-endlichen) Mustern auf. Schone Beispiele solcher Muster findet man in der islamischen Archi-tektur (Alhambra, Taj Mahal). Diese kann man als Pflasterung auffassen. Fuer unsere Zweckedefinieren wir eine Pflasterung so:
Definition 2.7. SeienM1, . . . ,Mm Polygone (also n-Ecke, nicht notwendig konvex). Eine Men-ge P = {P1, P2, . . .} von Polygonen heißt (ebene) Pflasterung, falls• P ◦i ∩ P ◦j = ∅ fur alle i 6= j (wobei P ◦ das Innere von P ist),•⋃i Pi = R2, und
• jedes P ∈ P ist kongruent zu einem der Mi.Ist m = 1 so heißt die Pflasterung monohedral.
Die Symmetriegruppe einer ebenen Pflasterung ist die Gruppe aller Bewegungen, die P un-verandert lassen:
Sym(P) = {g ∈ Eukl(2) : g(P) = P}Hier sind drei Beispiele fur ebene Pflasterungen angedeutet:
Der einfachste Fall ist der, dass die Symmetriegruppe ausschließlich Translationen enthalt. Dasist im Bild oben links der Fall.Insgesamt gibt es 17 verschiedene Symmetriegruppen von ebenen Pflasterungen, sogenanntewallpaper groups, auf deutsch Tapetengruppen (Fedorov 1891, Schonflies 1891, Barlow 1894).Dabei muss man zunachst klaren, was “verschieden” bedeutet. Am Beispiel der C2 und der D1
sahen wir schon, dass nicht-isomorph ein zu grobes Unterscheidungsmerkmal sein konnte.
18

Recall: Zwei Gruppen G,H heißen isomorph, falls es eine Bijektion f : G → H gibt, so dassfur alle x, y ∈ G gilt: f(xy) = f(x)f(y).Wir wollen Gruppen eigentlich unterscheiden bis auf Konjugation in Affin(n). D.h., wir fassenzwei GruppenG,H als gleich auf, falls es eine affine Transformation f (siehe nachstes Kapitel)gibt, so dass f−1Gf = H . Insbesondere sollen die Spiegelungen in G den Spiegelungen in Hentsprechen usw.(Beispiel: eine kristallographische Gruppe G, die nur Translationen enthalt. u, v ∈ R2, G ={f(x) = x+nu+mv : m,n ∈ Z} ist isomorph zuH = {f(x) = x+ne1+me2 : n,m ∈ Z}.)Zum Gluck gilt fur kristallographische Gruppen:Bemerkung 2.8. Zwei kristallographische Gruppen G und H in Eukl(n) sind isomorph genaudann, wenn sie konjugiert sind in Affin(n) (vgl. Schwarzenberger [4, S. 209]).
Obacht! Das ist falsch fur endliche Gruppen, denn C2 und D1 sind isomorph, aber nicht kon-jugiert in Affin(2), da eine mogliche Bijektion die Drehung in C2 auf die Spiegelung in D1
abbilden muss.
Die Bestimmung der 17 Tapetengruppen ist mit elementaren Mitteln moglich, aber aufwendig.Daher deuten wir das hier nur an.
Aufgabe 7. (*) Man beweise: Ist P eine Drehung um den Winkel α mit Drehzentrum p und Qeine Drehung um den Winkel β mit Drehzentrum q 6= p, so gilt fur das Drehzentrum r und denDrehwinkel γ von R = (PQ)−1: Die Punkte p, q, r bilden ein Dreieck mit den Winkeln α/2(bei p), β/2 (bei q) und γ/2.
Wir beschranken uns auf die ebenen kristallographischen Gruppen, die nur Drehungen undTranslationen enthalten. SeiG eine solche. Wegen Lemma 2.6 konnen die Drehungen nur Dreh-winkel 2π/n mit n = 2, 3, 4, 6 haben.
19
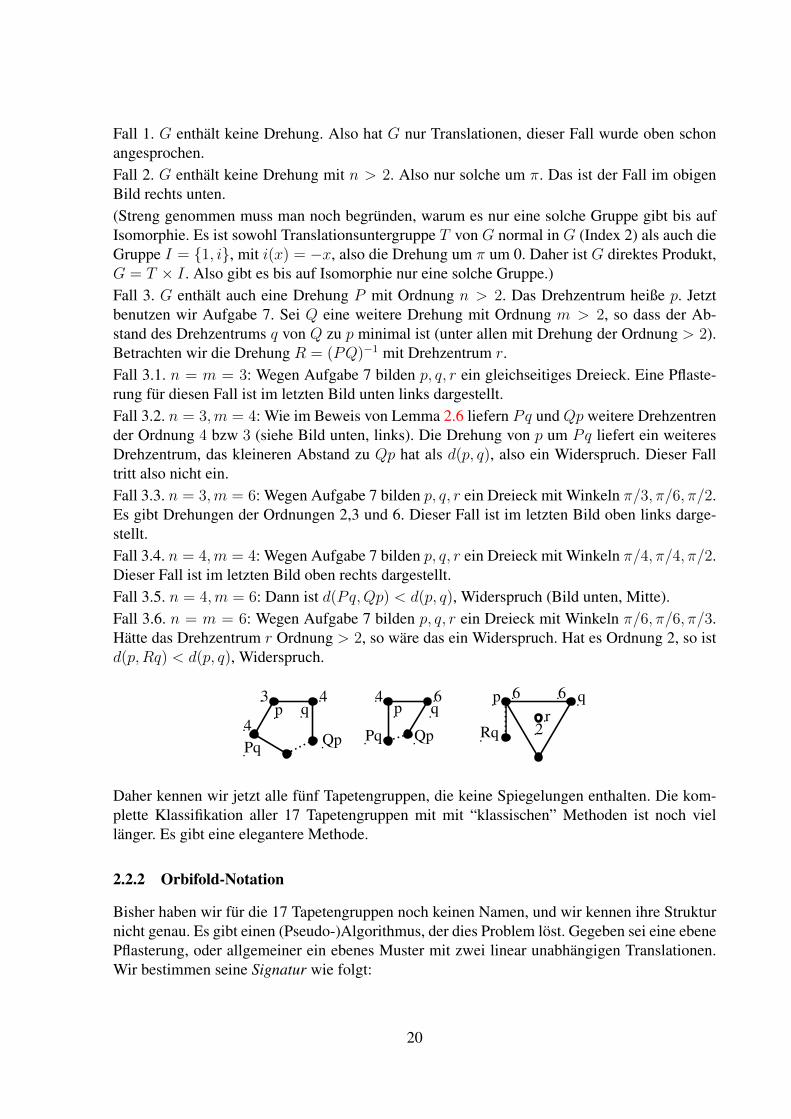
Fall 1. G enthalt keine Drehung. Also hat G nur Translationen, dieser Fall wurde oben schonangesprochen.Fall 2. G enthalt keine Drehung mit n > 2. Also nur solche um π. Das ist der Fall im obigenBild rechts unten.(Streng genommen muss man noch begrunden, warum es nur eine solche Gruppe gibt bis aufIsomorphie. Es ist sowohl Translationsuntergruppe T von G normal in G (Index 2) als auch dieGruppe I = {1, i}, mit i(x) = −x, also die Drehung um π um 0. Daher ist G direktes Produkt,G = T × I . Also gibt es bis auf Isomorphie nur eine solche Gruppe.)Fall 3. G enthalt auch eine Drehung P mit Ordnung n > 2. Das Drehzentrum heiße p. Jetztbenutzen wir Aufgabe 7. Sei Q eine weitere Drehung mit Ordnung m > 2, so dass der Ab-stand des Drehzentrums q von Q zu p minimal ist (unter allen mit Drehung der Ordnung > 2).Betrachten wir die Drehung R = (PQ)−1 mit Drehzentrum r.Fall 3.1. n = m = 3: Wegen Aufgabe 7 bilden p, q, r ein gleichseitiges Dreieck. Eine Pflaste-rung fur diesen Fall ist im letzten Bild unten links dargestellt.Fall 3.2. n = 3,m = 4: Wie im Beweis von Lemma 2.6 liefern Pq und Qp weitere Drehzentrender Ordnung 4 bzw 3 (siehe Bild unten, links). Die Drehung von p um Pq liefert ein weiteresDrehzentrum, das kleineren Abstand zu Qp hat als d(p, q), also ein Widerspruch. Dieser Falltritt also nicht ein.Fall 3.3. n = 3,m = 6: Wegen Aufgabe 7 bilden p, q, r ein Dreieck mit Winkeln π/3, π/6, π/2.Es gibt Drehungen der Ordnungen 2,3 und 6. Dieser Fall ist im letzten Bild oben links darge-stellt.Fall 3.4. n = 4,m = 4: Wegen Aufgabe 7 bilden p, q, r ein Dreieck mit Winkeln π/4, π/4, π/2.Dieser Fall ist im letzten Bild oben rechts dargestellt.Fall 3.5. n = 4,m = 6: Dann ist d(Pq,Qp) < d(p, q), Widerspruch (Bild unten, Mitte).Fall 3.6. n = m = 6: Wegen Aufgabe 7 bilden p, q, r ein Dreieck mit Winkeln π/6, π/6, π/3.Hatte das Drehzentrum r Ordnung > 2, so ware das ein Widerspruch. Hat es Ordnung 2, so istd(p,Rq) < d(p, q), Widerspruch.
p q3 4
QpPq4
6 6
2
qp
Rqrp q
4 6
QpPq
Daher kennen wir jetzt alle funf Tapetengruppen, die keine Spiegelungen enthalten. Die kom-plette Klassifikation aller 17 Tapetengruppen mit mit “klassischen” Methoden ist noch viellanger. Es gibt eine elegantere Methode.
2.2.2 Orbifold-Notation
Bisher haben wir fur die 17 Tapetengruppen noch keinen Namen, und wir kennen ihre Strukturnicht genau. Es gibt einen (Pseudo-)Algorithmus, der dies Problem lost. Gegeben sei eine ebenePflasterung, oder allgemeiner ein ebenes Muster mit zwei linear unabhangigen Translationen.Wir bestimmen seine Signatur wie folgt:
20
Allgemeine Regel: Wir beachten von gleichwertigen Objekten immer nur eine Kopie. Gleich-wertig sind Punkte / Drehzentren / Spiegelachsen / . . . wenn sie durch eine Symmetrie desMusters ineinander uberfuhrt werden konnen.1. Gibt es Spiegelachsen? Falls ja, notieren wir einen *.2. Fur jedes Drehzentrum auf einer Spiegelachse notieren wir ihre Ordnung rechts vom *. Fallswir keine Zahl notiert haben: Gibt es zwei parallele (nicht gleichwertige) Spiegelachsen, sonotieren wir **. (Ein * und keine Zahl rechts davon ist gleichbedeutend damit, dass es eineSpiegelachse gibt, aber keinen endlichen Bereich, der von Spiegelachsen begrenzt wird.)3. Fur jedes Drehzentrum, das nicht auf einer Spiegelachse liegt, notieren wir seine Ordnunglinks vom *.4. Kann man von einem Punkt zu einem gleichwertigen kommen, ohne eine Spiegelachse zukreuzen? Wenn ja, notieren wir ×. In diesem Fall gibt’s eine Gleitspiegelung. Gelangen wir zuzwei Kopien, die nicht durch eine bereits entdeckte Symmetrie zu erklaren sind, notieren wir××.5. Haben wir bisher nichts notiert, so gibt’s nur Translationen. Wir notieren ein ◦.Wir ordnen den Symbolen Kosten zu. (Falls es kein * gibt, ist alles “links vom *”.)
Links vom *:Symbol ◦ × 2 3 4 5 6 · · · N · · · ∞Euro 2 1 1
223
34
45
56· · · N−1
N· · · 1
Rechts vom *:Symbol ∗ 2 3 4 5 6 · · · N · · · ∞Euro 1 1
413
38
410
512· · · N−1
2N· · · 1
2
Theorem 2.9 (Magisches Theorem fur ebene Muster). Die moglichen Signaturen eines 2-periodischen ebenen Musters sind genau die, die insgesamt 2 Euro kosten und kein∞ enthalten.Die moglichen Signaturen eines Friesmusters sind genau die, die insgesamt 2 Euro kosten undmindestens ein∞ enthalten.Die moglichen Signaturen eines spharischen Musters sind genau die, die insgesamt 2− 2
gEuro
kosten und kein∞ enthalten. Dabei ist g die Ordnung der Symmetriegruppe.
Bsp: ∗632 kostet 1 + 5/12 + 1/3 + 1/4 = 2 Euro. Damit konnen wir herleiten:
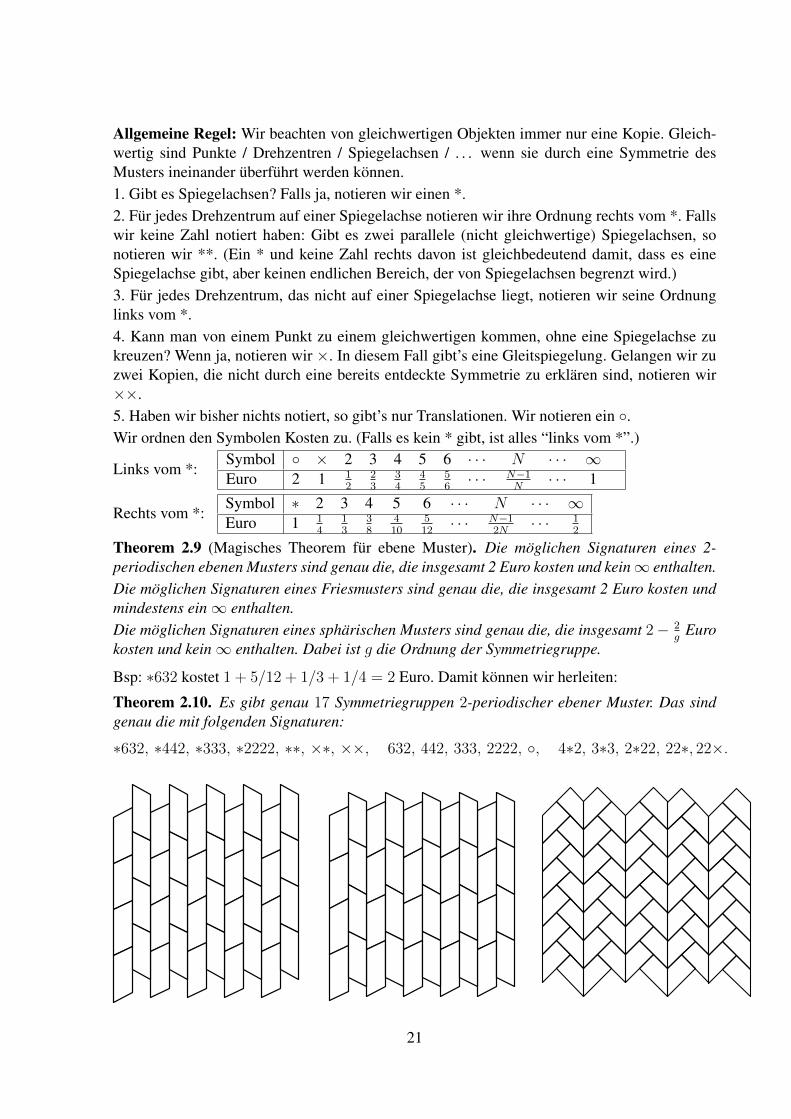
Theorem 2.10. Es gibt genau 17 Symmetriegruppen 2-periodischer ebener Muster. Das sindgenau die mit folgenden Signaturen:
∗632, ∗442, ∗333, ∗2222, ∗∗, ×∗, ××, 632, 442, 333, 2222, ◦, 4∗2, 3∗3, 2∗22, 22∗, 22×.
21
Theorem 2.10 beweist man nun einfach mittels des magischen Theorems 2.9, indem man alleFalle durchgeht. Das ergibt eine Liste von nur 17 Signaturen. Dann muss man noch fur jedeSignatur ein Muster finden, dass diese Signatur realisiert.
Aufgabe 8. Was sind die Signaturen der Pflasterungen in den Bildern auf den vorherigen undauf dieser Seite?
4. Mai 2012
Der Beweis des magischen Theorems benutzt Begriffe und Ergebnisse aus der Topologie. Siehedazu etwa Davis [3]. Eine einfache Beschreibung des Beweises findet sich in Conway, Burgiel& Goodman-Strauss [1] oder Conway [2].
2.2.3 Spharische Muster und Friesgruppen
Betrachten wir Muster auf einer Kugel, z.B. auf einem Fußball. Diesen konnen wir genau wieebenen Mustern ihre Signatur zuordnen, nach demselben Rezept wie oben.
Theorem 2.11. Die Symmetriegruppen spharischer Muster sind die mit den Signaturen
332, 432, 532, 22N,NN, ∗332, ∗432, ∗532, ∗22N, ∗NN, 3 ∗ 2, 2 ∗N, N∗, N×,
wobei N ∈ N, N ≥ 2.
Dass dies alle moglichen Signaturen sind, leitet man zunachst aus der Kostentabelle oben her.Damit erhalten wir allerdings zusatzlich die Moglichkeiten MN und ∗MN . Fur M 6= N gibtes aber kein spharisches Muster mit dieser Signatur.Dass die anderen Signaturen alle vorkommen, davon uberzeugt man sich wieder mittels kon-kreter Beispiele fur jede einzelne Moglichkeit.
Beispiel 2.12. Ein (klassischer) Fußball hat Symmetriegruppe ∗532. Moderne Fußballe habenoft (durch die Form ihrer Nahte oder durch Dekorationen) andere Symmetriegruppen.
Beispiel 2.13. Das Kantennetz eines Wurfels kann man auf eine Kugel um seinen Mittelpunktprojizieren. Die Symmetriegruppen dieses spharischen Musters und des Wurfels sind die glei-chen: ∗432. Verbietet man Spiegelungen, so bleiben nur die Symmetrien aus 432.
Eine Friesgruppe ist ein ebenes Muster, dessen Symmetriegruppe nur eine linear unabhangigeTranslation enthalt. Beispiel:
· · · pdpdpdpdpdpdpdpdpdpdp · · ·
Solche Muster konnen wir um den Aquator einer Kugel wickeln, so dass sich die Bausteinenur endlich oft, sagen wir, N mal, wiederholen. N konnen wir dazu beliebig groß wahlen. Dasliefert die Erklarung fur das∞: Wir denken uns dafur eine Drehung um einen idealen Punkt inunendlich. Das entspricht der Translation in einer Richtung.
Aufgabe 9. Man bestimme alle moglichen Signaturen von Friesgruppen und gebe fur jede Si-gnatur ein Beispiel eines Friesmuster mit dieser Signatur an.
22

2.2.4 Von Erzeugern und Relationen
Wir konnen nun die Symmetrigruppen von ebenen und spharischen Mustern durch ihre Signaturbeschreiben und auflisten. Wie aber konnen wir eine Symmetriegruppe “klassisch” hinschrei-ben? Ein eleganter Weg benutzt Prasentationen von Gruppen (Beschreibung durch Erzeugerund Relationen, vgl die Beschreibung der zyklischen Gruppen und der Diedergruppen am an-fang dieses Kapitels.) Die erhalt man so:
1. Fur jede Zahl A links vom ∗ notieren wir einen Erzeuger mit einem griechischen Buch-staben: α (β, γ, . . .), und eine Relation: αA = e. (e bezeichne hier das neutrale Element.)
2. Fur jede Gruppe von Symbolen der Form ∗AB · · ·N mit n Zahlen notieren wir: n + 1Erzeuger mit lateinischen Buchstaben: P,Q,R, . . . ,W , sowie einen weiteren Erzeugermit einem griechischen Buchstaben: λ, sowie Relationen
P 2 = (PQ)A = Q2 = (QR)B = R2 = · · · = (VW )N = W 2 = e; λ−1Pλ = W
(Falls nur ein ∗ ohne Zahl rechts davon da steht: zwei Erzeuger λ, P ; und RelationenP 2 = e; λ−1Pλ = P ).
3. Fur ein ◦ zwei Erzeuger S, T , sowie eine Relation STS−1T−1 = e.
4. Fur ein ×: Zwei Erzeuger Z, δ, sowie eine Relation Z2 = δ. Fur ××: Erzeuger Y, Z, δmit Z2 = δ, Y Z = ZY .)
5. Zum Schluss eine weitere Relation (“globale Relation”): Produkt aller vorkommendengriechischen Buchstaben αβγ · · ·λ · · · δ = e.
Es ist praktisch, die Erzeuger an die Signatur zu schreiben, nach folgendem Schema:
Beispiel 2.14. Signatur ∗632 liefert: λ ∗P 6Q3R2S . Daran liest man ab:
P 2 = (PQ)6 = Q2 = (QR)3 = R2 = (RS)2 = S2 = e; λ−1Pλ = S; λ = e
Wegen λ = e ist P = S, also konnen wir die Prasentation vereinfachen zu:
〈P,Q,R |P 2 = Q2 = R2 = (PQ)6 = (QR)3 = (RP )2 = e〉.
Beispiel 2.15. Signatur 3 ∗ 3: liefert: α3λ ∗P 3Q. Daran lesen wir ab:
α3 = e = P 2 = (PQ)3 = Q2; λ−1Pλ = Q; αλ = e.
Also ist λ = α−1, somit Q = αPα−1. Wir konnen daher die Erzeuger λ und Q durch α und Pdarstellen, das spart uns zwei Erzeuger. Wir erhalten die Prasentation
〈α, P |α3 = e = P 2 = (PαPα−1)3〉.
(Die Relation Q2 = e scheint weggefallen zu sein. Die durfen wir weglassen, weil sie aus denanderen folgt: Es ist Q2 = (αPα−1)2 = αPα−1αPα−1 = αPPα−1 = αP 2α−1 = αα−1 = e.)
Aufgabe 10. Bestimmen Sie moglichst einfache Prasentationen fur die Symmetriegruppen derebenen Pflasterungen aus diesem Kapitel (vgl Aufgabe 8).
23
2.2.5 Die kristallographischen Gruppen im Euklidischen Raum
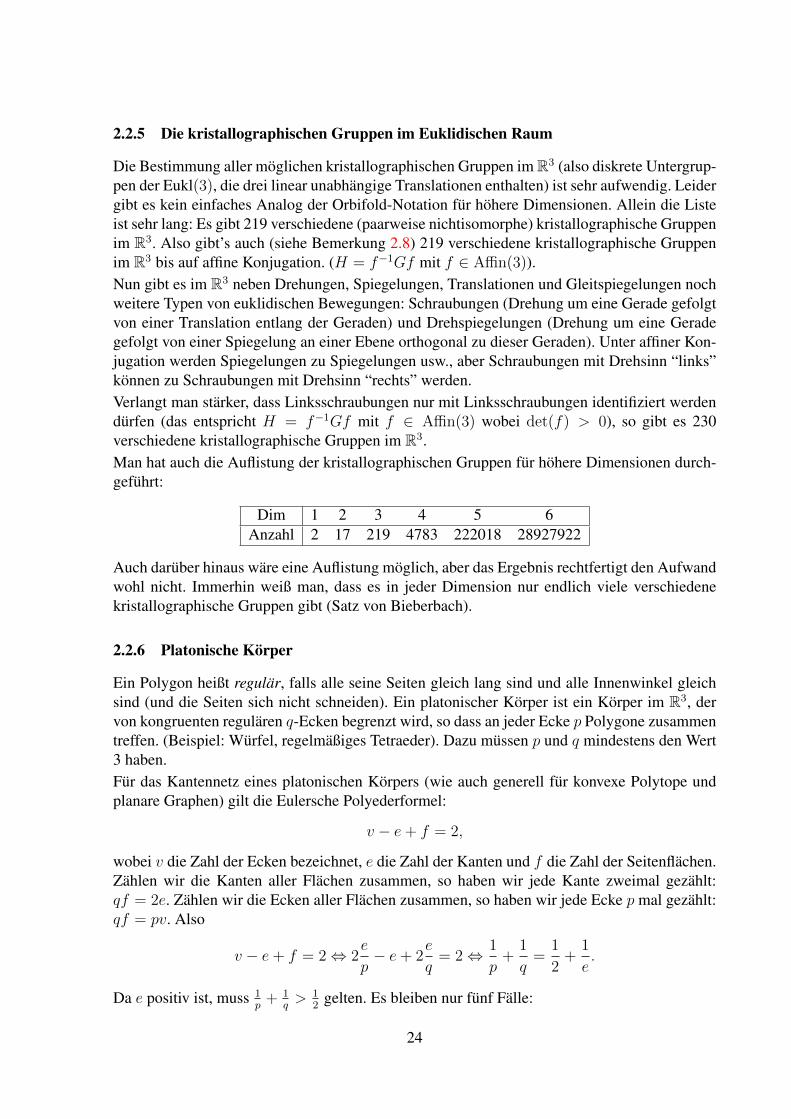
Die Bestimmung aller moglichen kristallographischen Gruppen im R3 (also diskrete Untergrup-pen der Eukl(3), die drei linear unabhangige Translationen enthalten) ist sehr aufwendig. Leidergibt es kein einfaches Analog der Orbifold-Notation fur hohere Dimensionen. Allein die Listeist sehr lang: Es gibt 219 verschiedene (paarweise nichtisomorphe) kristallographische Gruppenim R3. Also gibt’s auch (siehe Bemerkung 2.8) 219 verschiedene kristallographische Gruppenim R3 bis auf affine Konjugation. (H = f−1Gf mit f ∈ Affin(3)).Nun gibt es im R3 neben Drehungen, Spiegelungen, Translationen und Gleitspiegelungen nochweitere Typen von euklidischen Bewegungen: Schraubungen (Drehung um eine Gerade gefolgtvon einer Translation entlang der Geraden) und Drehspiegelungen (Drehung um eine Geradegefolgt von einer Spiegelung an einer Ebene orthogonal zu dieser Geraden). Unter affiner Kon-jugation werden Spiegelungen zu Spiegelungen usw., aber Schraubungen mit Drehsinn “links”konnen zu Schraubungen mit Drehsinn “rechts” werden.Verlangt man starker, dass Linksschraubungen nur mit Linksschraubungen identifiziert werdendurfen (das entspricht H = f−1Gf mit f ∈ Affin(3) wobei det(f) > 0), so gibt es 230verschiedene kristallographische Gruppen im R3.Man hat auch die Auflistung der kristallographischen Gruppen fur hohere Dimensionen durch-gefuhrt:
Dim 1 2 3 4 5 6Anzahl 2 17 219 4783 222018 28927922
Auch daruber hinaus ware eine Auflistung moglich, aber das Ergebnis rechtfertigt den Aufwandwohl nicht. Immerhin weiß man, dass es in jeder Dimension nur endlich viele verschiedenekristallographische Gruppen gibt (Satz von Bieberbach).
2.2.6 Platonische Korper
Ein Polygon heißt regular, falls alle seine Seiten gleich lang sind und alle Innenwinkel gleichsind (und die Seiten sich nicht schneiden). Ein platonischer Korper ist ein Korper im R3, dervon kongruenten regularen q-Ecken begrenzt wird, so dass an jeder Ecke p Polygone zusammentreffen. (Beispiel: Wurfel, regelmaßiges Tetraeder). Dazu mussen p und q mindestens den Wert3 haben.Fur das Kantennetz eines platonischen Korpers (wie auch generell fur konvexe Polytope undplanare Graphen) gilt die Eulersche Polyederformel:
v − e+ f = 2,
wobei v die Zahl der Ecken bezeichnet, e die Zahl der Kanten und f die Zahl der Seitenflachen.Zahlen wir die Kanten aller Flachen zusammen, so haben wir jede Kante zweimal gezahlt:qf = 2e. Zahlen wir die Ecken aller Flachen zusammen, so haben wir jede Ecke p mal gezahlt:qf = pv. Also
v − e+ f = 2⇔ 2e
p− e+ 2
e
q= 2⇔ 1
p+
1
q=
1
2+
1
e.
Da e positiv ist, muss 1p
+ 1q> 1
2gelten. Es bleiben nur funf Falle:
24
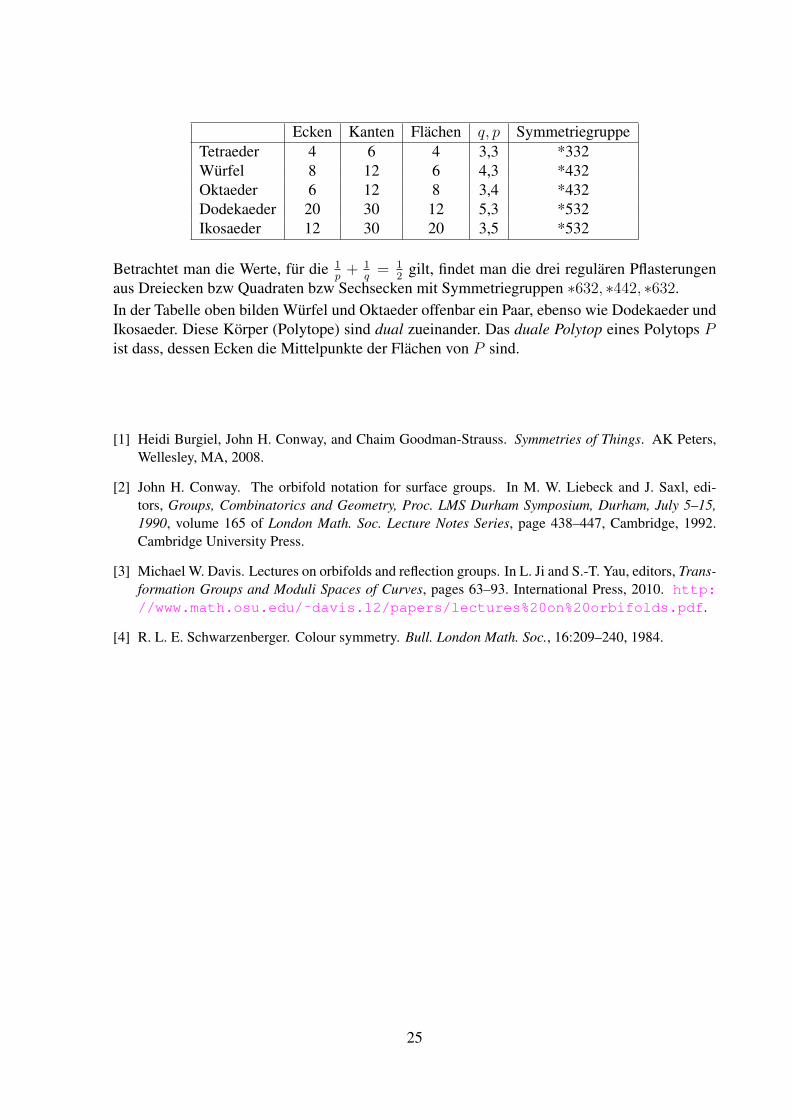
Ecken Kanten Flachen q, p SymmetriegruppeTetraeder 4 6 4 3,3 *332Wurfel 8 12 6 4,3 *432Oktaeder 6 12 8 3,4 *432Dodekaeder 20 30 12 5,3 *532Ikosaeder 12 30 20 3,5 *532
Betrachtet man die Werte, fur die 1p
+ 1q
= 12
gilt, findet man die drei regularen Pflasterungenaus Dreiecken bzw Quadraten bzw Sechsecken mit Symmetriegruppen ∗632, ∗442, ∗632.In der Tabelle oben bilden Wurfel und Oktaeder offenbar ein Paar, ebenso wie Dodekaeder undIkosaeder. Diese Korper (Polytope) sind dual zueinander. Das duale Polytop eines Polytops Pist dass, dessen Ecken die Mittelpunkte der Flachen von P sind.
[1] Heidi Burgiel, John H. Conway, and Chaim Goodman-Strauss. Symmetries of Things. AK Peters,Wellesley, MA, 2008.
[2] John H. Conway. The orbifold notation for surface groups. In M. W. Liebeck and J. Saxl, edi-tors, Groups, Combinatorics and Geometry, Proc. LMS Durham Symposium, Durham, July 5–15,1990, volume 165 of London Math. Soc. Lecture Notes Series, page 438–447, Cambridge, 1992.Cambridge University Press.
[3] Michael W. Davis. Lectures on orbifolds and reflection groups. In L. Ji and S.-T. Yau, editors, Trans-formation Groups and Moduli Spaces of Curves, pages 63–93. International Press, 2010. http://www.math.osu.edu/˜davis.12/papers/lectures%20on%20orbifolds.pdf.
[4] R. L. E. Schwarzenberger. Colour symmetry. Bull. London Math. Soc., 16:209–240, 1984.
25

10. Mai 2012
3 Affine Geometrie
3.1 Affine Transformationen
Definition 3.1. Eine Abbildung f : Rn → Rm heißt affin, wenn
f(λ1x1 + · · ·+ λkxk) = λ1f(x1) + · · ·+ λkf(xk) (1)
fur k ≥ 1, x1, . . . , xk ∈ Rn, λ1, . . . , λk ∈ R mit λ1 + · · ·+ λk = 1.Sie heißt Affinitat, wenn sie bijektiv ist (was insbesondere m = n impliziert).
Diese Definition funktioniert genauso, wenn uber einem beliebigen Korper K: Wir definierenfur allgemeinen Korper K eine affine Abbildung als eine Abbildung, die die Bedingung (1)fur alle k ≥ 2 und λ1, . . . , λk ∈ K erfullt, mit einem beliebigen (endlich-dimensionalen) K-Vektorraum V an der Stelle des Rn.Die Bedingung aus der Definition 3.1 ist leer fur k = 1. Fur k = 2 bedeutet sie, dass f Geradenauf Geraden abbildet, und auf den Geraden Teilungsverhaltnisse erhalt (z.B. Mittelpunkte). Esstellt sich heraus, dass es uber R auch schon ausreicht, die Bedingung fur k = 2 zu fordern:
Lemma 3.2. Eine Abbildung f : Rn → Rm ist genau dann affin, wenn
f(λx+ (1− λ)y) = λf(x) + (1− λ)f(y) (2)
gilt fur alle x, y ∈ Rn und λ ∈ R.
Beweis. Die Bedingung (2) gilt fur jede affine Abbildung: das ist genau der Spezialfall k = 2der Bedingung (1).Gelte nun (2); wir versuchen (1) fur alle k ≥ 1 zu beweisen. Fur k = 1 ist (1) trivial, und furk = 2 ist das genau (2). Fur k > 2 konnen nicht alle λi gleich 1 sein, also konnen wir annehmen,dass λ1 6= 1 ist, und dann argumentieren wir mit Induktion:
f(λ1x1 + · · ·+ λkxk) = f(λ1x1 + (1− λ1)(λ2
1− λ1x2 · · ·+
λ21− λ1
xk)).
Uber R ist eine affine Abbildung also genau eine, die Geraden auf Geraden abbildet, und dabeiTeilungsverhaltnisse erhalt.Achtung: Dieser Beweis funktioniert nicht — und die Aussage ist auch nicht richtig — furaffine Geometrie uber einem allgemeinen Korper K. Im Beweis zu Lemma 3.2 gibt es dannnamlich Schwierigkeiten mit “Fur k > 1 konnen nicht alle λi gleich 1 sein”: das stimmt nicht,wenn die Charakteristik von K die Zahl k + 1 teilt!
Aufgabe 11. Sei K = GF(2) der Korper mit 2 Elementen.Zeige, dass jede bijektive Abbildung K2 → K2 affin ist, also Bedingung (1) erfullt. Wie vielesolche Abbildungen gibt es?Zeige, dass nicht jede bijektive Abbildung K3 → K3 affin ist, aber trotzdem jede Abbildung(2) erfullt. Wie viele bijektive Abbildungen gibt es, und wie viele bijektive affine Abbildungengibt es?
26

Proposition 3.3. f : Rn → Rm ist genau dann affin, wenn es eine Matrix A ∈ Rm×n und einenVektor b ∈ Rm gibt mit f(x) = Ax+ b fur alle x ∈ Rn.f : Rn → Rn ist genau dann eine Affinitat, wenn es eine Matrix A ∈ GL(n,R) = {A ∈ Rn×n :detA 6= 0} und einen Vektor b ∈ Rm gibt mit f(x) = Ax+ b fur alle x ∈ Rn.
Korollar 3.4. Die Affinitaten f : Rn → Rm bilden eine Gruppe, namlich
Affin(n) = {f : f(x) = Ax+ b fur ein A ∈ GL(n), b ∈ Rn} ∼= Rn oGL(n).
Beweis. Die Umkehrabbildung zu f(x) = Ax+b ist f−1(x) = A−1(x−b) = A−1x+(−A−1b).
Man kann sich uberlegen, dass auch Affin(n) zwei Zusammenhangskomponenten hat, die durchdetA > 0 bzw. detA < 0 gegeben sind.Wir haben Affinitaten als bijektive Abbildungen definiert, die(1) Geraden auf Geraden abbilden und(2) Teilungsverhaltnisse erhalten.Eine bijektive Abbildung, die nur (1) erfullt, kann man Kollinearitat nennen. Im Allgemeinenreicht die erste Bedingung nicht aus, es ist also nicht jede Kollinearitat eine Affinitat, wie manz.B. am Fall m = n = 1 sieht, oder an der Aufgabe 11, oder an der Abbildung Cn → Cn,z 7→ z. Das sind aber auch schon fast alle Gegenbeispiele, wie man am folgenden Resultatsieht.
Theorem 3.5 (Charakterisierung der affinen Abbildungen). Sei K ein Korper mit mindestensdrei Elementen, und n ≥ 2.Dann ist jede Kollinearitat f : Kn → Kn eine Semi-Affinitat, d.h. sie erfullt
f(λx+ (1− λ)y) = α(λ)f(x) + (1− α(λ))f(y)
fur einen Korperautomorphismus α.Fur K = R gibt es keine Korperautomorphismen außer der Identitat, dann ist also jede Kolli-nearitat eine Affinitat.Fur K = C gibt es viele Korperautomorphismen, insbesondere die Konjugation, die auch nochR auf R abbildet.
11. Mai 2012
Dieses Resultat kann man aus einem Satz aus der projektiven Geometrie ableiten, den wir spaterbeweisen. Hier geben wir nur das Hauptlemma an. Dass R keine nicht-trivialen Automorphis-men hat, ist leicht zu zeigen, siehe Fischer [2, S. 33].
Lemma 3.6. Sei K ein Korper mit mindestens drei Elementen und f : Kn → Kn eine Kolli-nearitat. Dann bildet f parallele Geraden auf parallele Geraden ab.
Beweis. Fur n = 1 ist nichts zu zeigen. Fur n ≥ 2 zeigt man, dass (1.) zwei Geraden genau dannparallel sind, wenn sie in einer Ebene liegen und keinen Schnittpunkt haben, und (2.) jede Ebenedurch die Verbindungsgeraden der Punkte auf zwei sich schneidenden Geraden uberdeckt wird— letzteres stimmt eben nur fur |K| ≥ 3.Fur Details siehe Fischer [2, Abschnitt 1.3].
27
3.1.1 Hauptsatz der Affinen Geometrie
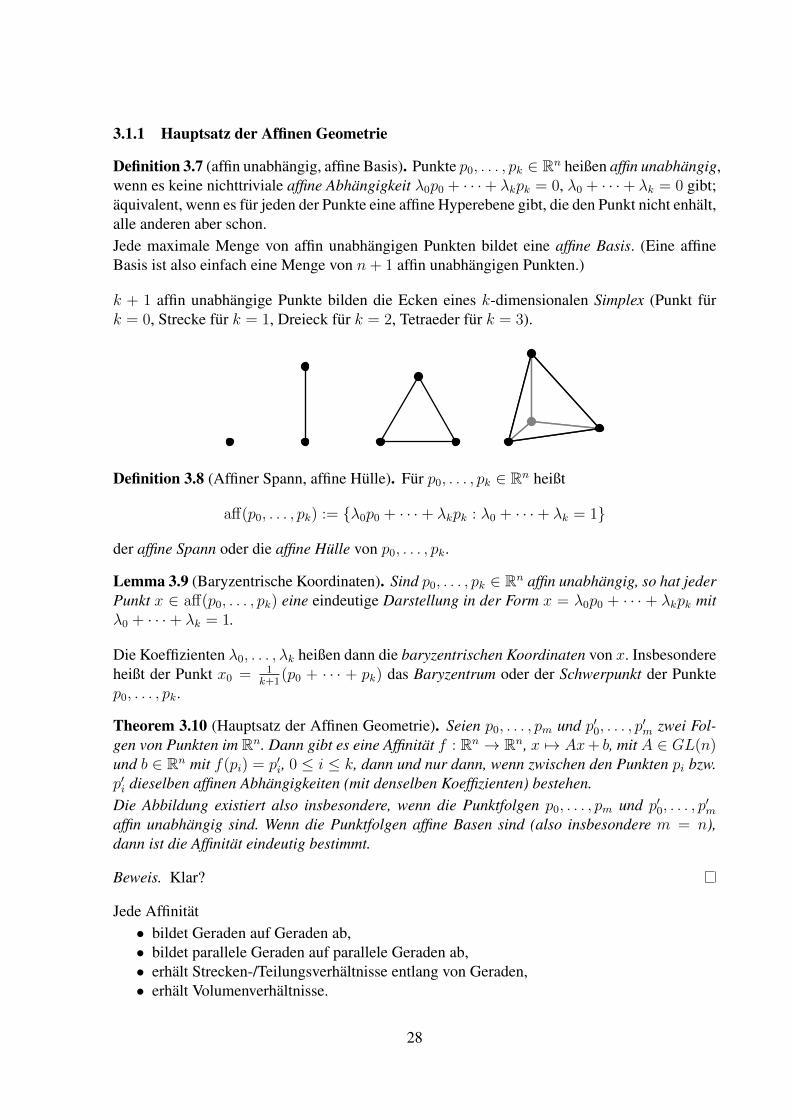
Definition 3.7 (affin unabhangig, affine Basis). Punkte p0, . . . , pk ∈ Rn heißen affin unabhangig,wenn es keine nichttriviale affine Abhangigkeit λ0p0 + · · ·+ λkpk = 0, λ0 + · · ·+ λk = 0 gibt;aquivalent, wenn es fur jeden der Punkte eine affine Hyperebene gibt, die den Punkt nicht enhalt,alle anderen aber schon.Jede maximale Menge von affin unabhangigen Punkten bildet eine affine Basis. (Eine affineBasis ist also einfach eine Menge von n+ 1 affin unabhangigen Punkten.)
k + 1 affin unabhangige Punkte bilden die Ecken eines k-dimensionalen Simplex (Punkt furk = 0, Strecke fur k = 1, Dreieck fur k = 2, Tetraeder fur k = 3).
Definition 3.8 (Affiner Spann, affine Hulle). Fur p0, . . . , pk ∈ Rn heißt
aff(p0, . . . , pk) := {λ0p0 + · · ·+ λkpk : λ0 + · · ·+ λk = 1}
der affine Spann oder die affine Hulle von p0, . . . , pk.
Lemma 3.9 (Baryzentrische Koordinaten). Sind p0, . . . , pk ∈ Rn affin unabhangig, so hat jederPunkt x ∈ aff(p0, . . . , pk) eine eindeutige Darstellung in der Form x = λ0p0 + · · · + λkpk mitλ0 + · · ·+ λk = 1.
Die Koeffizienten λ0, . . . , λk heißen dann die baryzentrischen Koordinaten von x. Insbesondereheißt der Punkt x0 = 1
k+1(p0 + · · · + pk) das Baryzentrum oder der Schwerpunkt der Punkte
p0, . . . , pk.
Theorem 3.10 (Hauptsatz der Affinen Geometrie). Seien p0, . . . , pm und p′0, . . . , p′m zwei Fol-
gen von Punkten im Rn. Dann gibt es eine Affinitat f : Rn → Rn, x 7→ Ax+ b, mit A ∈ GL(n)und b ∈ Rn mit f(pi) = p′i, 0 ≤ i ≤ k, dann und nur dann, wenn zwischen den Punkten pi bzw.p′i dieselben affinen Abhangigkeiten (mit denselben Koeffizienten) bestehen.Die Abbildung existiert also insbesondere, wenn die Punktfolgen p0, . . . , pm und p′0, . . . , p
′m
affin unabhangig sind. Wenn die Punktfolgen affine Basen sind (also insbesondere m = n),dann ist die Affinitat eindeutig bestimmt.
Beweis. Klar?
Jede Affinitat• bildet Geraden auf Geraden ab,• bildet parallele Geraden auf parallele Geraden ab,• erhalt Strecken-/Teilungsverhaltnisse entlang von Geraden,• erhalt Volumenverhaltnisse.
28

Welche dieser Eigenschaften reicht zur Charakterisierung von Affinitaten?
Proposition 3.11. f : Rn → Rn ist genau dann eine Affinitat, wenn sie Volumenverhaltnisseerhalt, wenn es also eine Konstante α ∈ R, α 6= 0, gibt mit
det(f(p1)− f(p0), . . . , f(pn)− f(p0)) = α det(p1 − p0, . . . , pn − p0)
fur alle p0, . . . , pn ∈ Rn.
Beweis. Offenbar erhalt jede Affinitat f(x) = Ax+ b Volumenverhaltnisse, mit α = detA.Wenn umgekehrt f Volumenverhaltnisse erhalt, so bildet f Punkte auf einer Geraden auf Punkteauf einer Geraden ab — andernfalls findet man eine “affine Basis”, die auf eine “affine Nicht-Basis” abgebildet wird.
Korollar 3.12. Die volumenerhaltenden Abbildungen Rn → Rn sind genau die Affinitaten derDeterminante 1, bilden also die Gruppe
{f : f(x) = Ax+ b fur ein A ∈ SL(n), b ∈ Rn} ∼= Rn o SL(n),
wobei SL(n) die spezielle lineare Gruppe SL(n) = {A ∈ Rn×n : detA = 1 bezeichnet.
Bemerkung 3.13 (”Freiheitsgrade“ — Dimension der Gruppe der affinen Transformationen).Eine Affinitat ist durch die Bilder von n + 1 Punkten einer affinen Basis festgelegt, und diesekonnen (generisch) frei gewahlt werden. Also ist die Anzahl der Freiheitsgrade und die Dimen-sion der Gruppe Affin(n) gleich (n+ 1)n.In der Tat ist {(A, b) : detA 6= 0} eine offene Teilmenge des Rn×(n+1).
3.2 Anwendungen
Proposition 3.14 (Die Seitenhalbierenden schneiden sich.). In jedem Dreieck schneiden sichdie Verbindungslinien von den Ecken zu den gegenuberliegenden Seitenmittelpunkten.
Beweis. Die Behauptung ist invariant unter affinen Transformationen, also konnen wir anneh-men, dass wir es mit einem gleichseitigen Dreieck zu tun haben.
A
C
B
Mb
Ma
Mc
S
A′ B′
C ′
M ′b M ′
a
M ′c
S ′
29

Entsprechend hoherdimensional: Baryzentren.
Proposition 3.15 (Satz von Ceva). In jedem Dreieck schneiden sich die Verbindungslinien vonden EckenA,B,C zu PunktenA′, B′, C ′ auf den gegenuberliegenden Seiten dann und nur dann,wenn
AC ′
C ′B
BA′
A′C
CB′
B′A= 1.
Beweis. Invariant unter affinen Transformationen, also konnen wir annehmen, dass wir es miteinem gleichschenkligen rechtwinkligen Dreieck A = (0, 0), B = (1, 0), C = (0, 1) zu tunhaben.Fur dieses Dreieck rechnet man die Behauptung dann leicht(er) nach.
Merke: Koordinatentransformationen ausnutzen!Dto: “Der Satz von Menelaus” uber die Schnittpunkte einer Geraden mit den (verlangerten)Kanten eines Dreiecks.Quelle: Brannan et al. [1, Sect. 2.4]
Aufgabe 12. Sei f : R2 → R2, f(x) = Ax+b eine affine Abbildung, die die Punkte p0 = (1, 0),p1 = (4, 1) und p2 = (s, 1) auf f(p0) = (2, 1), f(p1) = (5,−2) und f(p2) = (1, t) abbildet,wobei s, t aus R sind. Fur welche Werte von s, t hat f(1) genau einen Fixpunkt,(2) eine Fixpunktgerade,(3) keinen Fixpunkt?
Aufgabe 13. Sind die folgenden Punktmengen im R2 affin-aquivalent? Wenn nein, woran kannman das sehen — z.B. an affinen Abhangigkeiten? Wenn ja, geben Sie eine affine Aquivalenzan — also eine Affinitat, die die erste Punktmenge auf die zweite abbildet!
1. {(0, 0), (1, 0), (1, 1)} und {(0, 0), (1, 0), (2, 2)}?2. {(0, 0), (1, 1), (2, 2)} und {(0, 0), (2, 2), (4, 4)}?3. {(0, 0), (1, 0), (2, 2)} und {(0, 0), (2, 2), (4, 4)}?4. {(0, 0), (1, 0), (1, 1), (0, 1)} und {(0, 0), (1, 0), (1
2, 1), (1
2,−1)}?
5. {(0, 0), (1, 0), (1, 1), (0, 1)} und {(0, 0), (1, 0), (12, 1), (1
2,−2)}?
Achtung: die Punktmengen sind nicht geordnet/nummeriert!
Aufgabe 14. Sind die folgenden Punktmengen P1 und P2 im R5 affin-aquivalent? Wenn nein,woran kann man das sehen — z.B. an affinen Abhangigkeiten? Wenn ja, geben Sie eine affineAquivalenz an!
P1 : P2 :(1, 0, 0, 0, 0) (1, 1, 0, 0, 0)(0, 1, 0, 0, 0) (0, 1, 1, 0, 0)(0, 0, 1, 0, 0) (0, 0, 1, 1, 0)(0, 0, 0, 1, 0) (0, 0, 0, 1, 1)(0, 0, 0, 0, 1) (1, 0, 0, 0, 1)
(0, 0, 0, 0, 0) (0, 0, 0, 0, 0)(1, 1, 1, 1, 1) (1, 1, 1, 1, 1)
30
(Hinweis: P1 und P2 sind die Eckenmengen von “Bipyramiden” uber 4-dimensionalen Simple-xen — die beide in der Eckenmenge des 5-dimensionalen 0/1-Wurfels liegen [3, p. 9].)
[1] David A. Brannan, Matthew F. Esplen, and Jeremy J. Gray. Geometry. Cambridge University Press,Cambridge, 1999.
[2] Gerd Fischer. Analytische Geometrie. Vieweg, Wiesbaden, 2001. 7. Auflage.
[3] Gunter M. Ziegler. Lectures on 0/1-polytopes. In G. Kalai and G. M. Ziegler, editors, Polytopes— Combinatorics and Computation, volume 29 of DMV Seminars, pages 1–41. Birkhauser-Verlag,Basel, 2000.
31

18. Mai 2012
4 Kegelschnitte und Quadriken
4.1 Kegelschnitte
Vorbemerkung: Klassisches Thema seit der antiken griechischen Mathematik. So schrieb (an-geblich) Apollonios von Perge (* ca. 262 v. Chr. in Perge; † ca. 190 v. Chr. in Alexandria) seinHauptwerk “Konika” (Uber Kegelschnitte). Wikipedia: “In seinem bedeutendsten Werk Ko-nika (”Uber Kegelschnitte“) widmete er sich eingehenden Untersuchungen uber Kegelschnit-te, Grenzwertbestimmungen und Minimum-Maximum-Problemen. Er wies nach, dass die dreiverschiedenen Kegelschnitte (Ellipse, Parabel und Hyperbel), deren Namen und Definitionen ereinfuhrte, vom selben allgemeinen Kegeltypus stammen.”Vorbemerkung: Quadriken (Losungsmengen von quadratischen Gleichungen in n Variablen)werden fur n = 2 oft mit Kegelschnitten “identifiziert”. Aussagen wie “Fur n = 2 nennen wirdie Quadriken Kegelschnitte” verdecken aber◦ die naheliegende Definition von Kegelschnitten als “Schnitten eines (Doppel-)Kegels mit
einer Ebene”◦ die Tatsache, dass zum Beispiel die leere Menge zwar eine Quadrik ist, aber kein Schnitt
eines Kegels,◦ die Frage, wann zwei Quadriken bzw. zwei Kegelschnitte gleich/aquivalent sind.Im Folgenden werden wir◦ Kegelschnitte als Schnitte eines (Doppel-)Kegels mit einer Ebene definieren, und (bis auf
Kongruenz-/Isometrie) klassifizieren◦ Quadriken als Losungsmengen von quadratischen Gleichungen definieren, durch Matrizen
darstellen, bis auf Isometrie klassifizieren, und auch bis auf affine Transformationen klassifi-zieren (jeweils mit “Normalform”)◦ ableiten, dass fur n = 2 die Kegelschnitte (bis auf Isometrie) genau die nicht-leeren Quadri-
ken sind (Ausnahme: zwei parallele Geraden sind auch eine Quadrik, aber kein Kegelschnitt).Unser Ausgangspunkt ist der “orthogonale” Kreiskegel C = {(x1, x2, x3) ∈ R3 : x21+x22 = x23}(der ja eigentlich ein Doppelkegel ist). Wir schreiben ihn fur das Folgende einfacher als
C = {(x, y, z) ∈ R3 : x2 + y2 = z2}.
Schneidet man C mit einer Ebene E, so erhalt man zum Beispiel◦ fur Schnitt mit z = c: einen Kreis, bzw. fur c = 0 einen Punkt,◦ fur Schnitt mit y = c: eine Hyperbel, bzw. fur c = 0 zwei sich schneidende Geraden,◦ fur Schnitt mit z = y + c: Parabel, Doppelgerade
Definition 4.1. Eine Teilmenge Q ⊂ R2 ist ein Kegelschnitt, wenn es eine Isometrie zwischenR2 und einer Ebene E ⊂ R3 gibt, unter der Q auf C ∩ E abgebildet wird, also auf den Schnittder Ebene E mit dem Doppelkreiskegel C = {(x, y, z) ∈ R3 : x2 + y2 = z2}
Wir betrachten also jetzt einen Schnitt von C mit einer beliebigen Ebene E, wobei wir dieSchnitte bis auf Isometrie klassifizieren. Wir konnen dabei die Symmetrien des Kreiskegels
32

ausnutzen, also annehmen, dass wir eine Ebene der Form z = c, c ≥ 0 betrachten, die wir dannum einen Winkel ϕ, 0 ≤ ϕ ≤ π/2 (also um hochstens 90 Grad) um die y-Achse “kippen”.Wir uberlegen uns, dass die Isometrie, die Punkte der Ebene z = 0 auf eine solche “allgemeine”Ebene gegeben ist, wie folgt abbildet: x
y0
7→ x
y0
+
00c
=
xyc
7→ cosϕ 0 − sinϕ
0 1 0sinϕ 0 cosϕ
xyc
=
cosϕx− sinϕ cy
sinϕx + cosϕ c
.
Die Bildpunkte dieser Transformation mussen also die Gleichung des Kreiskegels erfullen:
(cosϕx− sinϕ c)2 + y2 = (sinϕx+ cosϕ c)2.
Vereinfachung dieser Gleichung, unter Verwendung der Doppelwinkelsatze (Additionstheore-me) cos2 ϕ− sin2 ϕ = cos 2ϕ und 2 cosϕ sinϕ = cos 2ϕ ergibt
(cos 2ϕ)x2 − 2c sin 2ϕx+ y2 = (cos 2ϕ)c2, (3)
also eine polynomiale Gleichung vom Grad 2 in den Variablen x und y.Fall 1. Fur ϕ = π/4, also cos 2ϕ = 0 und sin 2ϕ = 1 ergibt dies
−2c x+ y2 = 0
also fur c > 0 eine Parabel x = 12cy2, und fur c = 0 eine Gerade (genauer eine Doppelgerade)
y2 = 0.Nehmen wir also jetzt ϕ 6= π/4 an, so konnen wir durch cos 2ϕ teilen und quadratisch erganzen,und erhalten
(x− 2c tan 2ϕ)2 +y2
cos 2ϕ= (1 + tan2 2ϕ)c2.
Wenn wir jetzt x− 2c tan 2φ einfach durch x ersetzen, so entspricht das einer Translation, alsoeiner Isometrie, und wir erhalten
x2 +y2
cos 2ϕ=
c2
cos2 2ϕ.
Fall 2. Fur 0 ≤ ϕ < π/4 ist cos 2ϕ > 0, dann ist das fur c > 0 die Gleichung einer beliebigen(!) Ellipse, die man mit a2 := c2
cos2 2ϕund b2 := c2
cos 2ϕauf die Normalform
x2
a2+y2
b2= 1 mit a ≥ b > 0
bringen kann; fur c = 0 erhalt man entsprechend mit b2 := cos 2ϕ
x2 +y2
b2= 0 mit b > 0
also den Punkt (0, 0).Fall 3. Fur π/4 < ϕ ≤ π/2 ist cos 2ϕ < 0, dann ist das fur c > 0 die Gleichung einer Hyperbel,die man mit a2 := c2
cos2 2ϕund b2 := − c2
cos 2ϕauf die Normalform
x2
a2− y2
b2= 1 mit a ≥ b > 0
33

bringen kann. Beachte, dass dies keine beliebige Hyperbel ist, sondern eine, bei der die Asym-ptoten eines Astes maximal einen rechten Winkel einschließen.Fur c = 0 erhalt man entsprechend mit b2 := −cos 2ϕ
x2 − y2
b2= 0 mit b > 0
also zwei sich schneidende Geraden y = ±bx.Damit haben wir im Wesentlichen den folgenden Satz bewiesen.
Theorem 4.2. Jeder Schnitt des “orthogonalen” Standard-Kreiskegels C = {(x, y, z) ∈ R3 :x2 + y2 = z2} mit einer Ebene im R3 sind isometrisch zu einer Menge aus genau einer derfolgenden sechs Familien:1. eine Ellipse x2
a2+ y2
b2= 1 mit a ≥ b > 0,
2. eine Parabel x = 12cy2 mit c > 0,
3. eine Hyperbel x2
a2− y2
b2= 1 mit a ≥ b > 0 (also mit Offungswinkel α ≤ π/2),
4. zwei sich schneidende Geraden,5. eine Gerade, oder6. ein Punkt.Umgekehrt tritt jede dieser Figuren mit den gegebenen Parametern auch als Schnitt auf.
24. Mai 2012
4.2 Quadriken
Achtung: wir haben eigentlich noch nicht definiert, was eine Ellipse/Hyperbel/Parabel eigent-lich ist. Entsprechende Definitionen in verschiedenen Lehrbuchern sind ausgesprochen unbe-friedigend. Achten Sie bei der Lekture zum Beispiel darauf, euklidische oder affine Aquivalenzzugelassen wird . . .Jedenfalls sehen wir aus der Diskussion im vorherigen Abschnitt, mit Gleichung (3), dass dieKegelschnitte alle Losungsmengen von quadratischen Gleichungen sind, sie sind also “Quadri-ken”.
Definition 4.3. Eine Quadrik in einem n-dimensionalen affinen Raum ist die LosungsmengeQ ⊂ Rn einer Polynomgleichung vom Grad hochstens 2 in den Koordinaten.
Man spricht dabei von quadratischen Gleichungen. Die Quadrik wird auch als Nullstellenmengedes Polynoms q(x1, . . . , xn) ∈ R[x1, . . . , xn] in den Koordinaten x1, . . . , xn bezeichnet.
Lemma 4.4. Die Definition einer Quadrik ist unabhangig von den gewahlten Koordinaten.Jedes Bild einer Quadrik unter einer affinen Transformation (insbesondere also: unter einereuklidischen Transformation) ist wieder eine Quadrik.Jeder Schnitt einer Quadrik mit einem affinen Unterraum ist wieder eine Quadrik.
Prinzipiell lasst die obige Definition auch Polynome vom Grad hochstens 1 zu, also linearePolynome. Dieser Fall ist nicht besonders interessant: dann ist Q entweder leer, oder eine Hy-perebene im Rn, oder der gesamte Rn. Wir lassen diese drei ”trivialen“ Falle als Quadriken inder Definition zu, ignorieren sie im Folgenden aber meist.
34

If Fall n = 1 ist Q also die Losung einer quadratischen Gleichung, also besteht Q aus ein oderaus zwei Punkten oder ist leer (oder ist ganz R).Fur n = 2 konnen wir die quadratische Gleichung wie folgt schreiben:
Q = {(x, y) ∈ R2 : ax2 + bxy + cy2 + dx+ ey + f = 0} fur a, b, c, d, e, f ∈ R.
Wenn (a, b, c) = (0, 0, 0), so erhalten wir eine lineare Gleichung, die Losungsmenge ist dannGerade oder leer oder der R2. Diesen Fall konnten wir also ausschließen . . .Bessere Notation, mehrere Moglichkeiten:
Q ={(x1
x2
)∈ R2 : a11x1
2 + 2a12x1x2 + a22x22 + 2a01x1 + 2a02x2 + a00 = 0
}=
{(x1x2
)∈ R2 : (1, x1, x2)
a00 a01 a02a10 a11 a12a20 a21 a22
1x1x2
= 0}
fur aij ∈ R2 (0 ≤ i, j ≤ 2).Entsprechend konnen wir n-dimensionale Quadriken wie folgt schreiben:
Q ={x ∈ Rn :
∑0≤i,j≤n
aijxixj = 0, mit x0 := 1}
={x ∈ Rn : (1, xt)
(a00 a0
t
a0 A
)(1x
)= 0}
={x ∈ Rn : (1, xt)
(c bt
b A
)(1x
)= 0}
= {x ∈ Rn : xtAx+ 2btx+ c = 0}
fur A ∈ Rn×n symmetrisch, a0 ∈ Rn, a00 ∈ Rbzw. A ∈ Rn×n symmetrisch, b ∈ Rn, c ∈ R.
Aufgabe 15. Eine Quadrik im Rn enthalte die sieben Punkte 0, a, b, c, a + b, a + c und b + c.Man zeige, dass sie auch den Punkt a+ b+ c enthalt.
4.2.1 Euklidische Klassifikation der Quadriken
Im Folgenden werden Koordinatentransformationen angewandt, um die Quadriken auf beson-ders einfache, und eindeutig bestimmte, Gleichungen zu bringen, also auf ”Normalform“. Dabeiwenden wir in dieser Reihenfolge an:(1) orthogonale Transformationen(2) Translationen(3) SkalierungDabei verwenden wir, dass die Kombination (1) von (2) eine beliebige Isometrie ergibt. DieseKombination muss uns also die Klassifikation der Quadriken bis auf Isometrie liefern. Lassenwir zusatzlich Skalierung von Variablen zu, so ergibt das beliebige affine Transformationen,und damit die entsprechende Klassifikation der Quadriken.Fundamentales Hilfsmittel aus der Linearen Algebra ist der Spektralsatz fur selbstadjungierteEndomorphismen/symmetrische Matrizen:
35
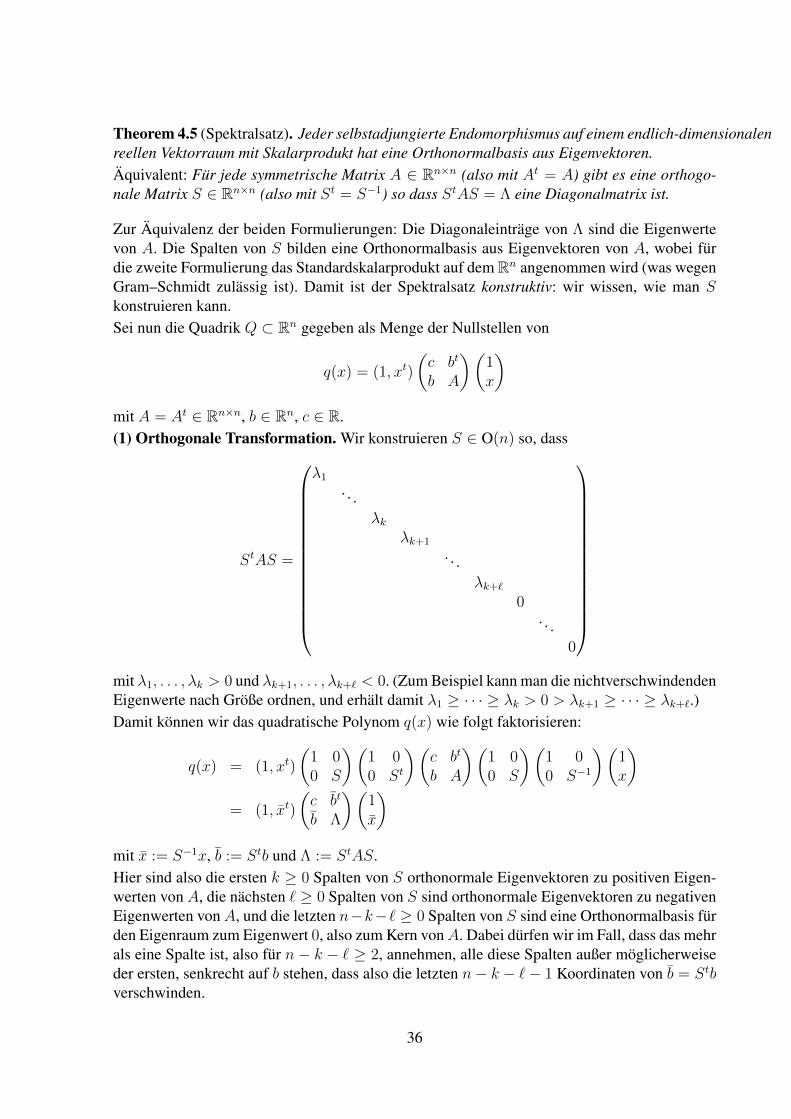
Theorem 4.5 (Spektralsatz). Jeder selbstadjungierte Endomorphismus auf einem endlich-dimensionalenreellen Vektorraum mit Skalarprodukt hat eine Orthonormalbasis aus Eigenvektoren.Aquivalent: Fur jede symmetrische Matrix A ∈ Rn×n (also mit At = A) gibt es eine orthogo-nale Matrix S ∈ Rn×n (also mit St = S−1) so dass StAS = Λ eine Diagonalmatrix ist.
Zur Aquivalenz der beiden Formulierungen: Die Diagonaleintrage von Λ sind die Eigenwertevon A. Die Spalten von S bilden eine Orthonormalbasis aus Eigenvektoren von A, wobei furdie zweite Formulierung das Standardskalarprodukt auf dem Rn angenommen wird (was wegenGram–Schmidt zulassig ist). Damit ist der Spektralsatz konstruktiv: wir wissen, wie man Skonstruieren kann.Sei nun die Quadrik Q ⊂ Rn gegeben als Menge der Nullstellen von
q(x) = (1, xt)
(c bt
b A
)(1x
)mit A = At ∈ Rn×n, b ∈ Rn, c ∈ R.(1) Orthogonale Transformation. Wir konstruieren S ∈ O(n) so, dass
StAS =
λ1. . .
λkλk+1
. . .λk+`
0. . .
0
mit λ1, . . . , λk > 0 und λk+1, . . . , λk+` < 0. (Zum Beispiel kann man die nichtverschwindendenEigenwerte nach Große ordnen, und erhalt damit λ1 ≥ · · · ≥ λk > 0 > λk+1 ≥ · · · ≥ λk+`.)Damit konnen wir das quadratische Polynom q(x) wie folgt faktorisieren:
q(x) = (1, xt)
(1 00 S
)(1 00 St
)(c bt
b A
)(1 00 S
)(1 00 S−1
)(1x
)= (1, xt)
(c bt
b Λ
)(1x
)mit x := S−1x, b := Stb und Λ := StAS.Hier sind also die ersten k ≥ 0 Spalten von S orthonormale Eigenvektoren zu positiven Eigen-werten von A, die nachsten ` ≥ 0 Spalten von S sind orthonormale Eigenvektoren zu negativenEigenwerten von A, und die letzten n−k−` ≥ 0 Spalten von S sind eine Orthonormalbasis furden Eigenraum zum Eigenwert 0, also zum Kern vonA. Dabei durfen wir im Fall, dass das mehrals eine Spalte ist, also fur n− k − ` ≥ 2, annehmen, alle diese Spalten außer moglicherweiseder ersten, senkrecht auf b stehen, dass also die letzten n− k − `− 1 Koordinaten von b = Stbverschwinden.
36

Damit liegt das Polynom q(x) jetzt in der Form
q(x) = λ1x21 + · · ·+ λk+`xk+`
2 + 2b1x1 + · · ·+ 2bk+`+1xk+`+1 + c
vor. Dieses kann man nun durch eine quadratische Erganzung vereinfachen, oder — aquivalentdazu (!) — durch eine geeignete Translation.(2) Translation. Eine Translation x 7→ x + u (also eine euklidische Abbildung) lasst sich inden “homogenen” Koordinaten (mit zusatzlicher Koordinate x0 = 1) als lineare Abbildungdarstellen: (
1x
)7→(
1u+ x
)=
(1 0t
u E
)(1x
).
wobei E die Einheitsmatrix darstellt (hier: E ∈ Rn×n). Die Inverse der Translation um u ist dieTranslation um −u. Daher faktorisieren wir weiter q(x) als
(1, xt)
(1 00 S
)(1 −ut0 E
)(1 ut
0 E
)(1 00 St
)(c bt
b A
)(1 00 S
)(1 0t
u E
)(1 0t
−u E
)(1 00 S−1
)(1x
)= (1, ¯xt)
(c + 2btu + utΛu bt + utΛ
b + Λu Λ
)(1¯x
)mit ¯x = Stx− u.
25. Mai 2012
Nun setzen wirr := rankA = rank Λ = k + `
und
r′ := rank(c bt
b A
)= rank
(c bt
b Λ
)= rank
(c+ 2btu+ utΛu bt + utΛ
b+ Λu Λ
).
Dabei ist offenbar 0 ≤ r ≤ r′ ≤ r + 2, r ≤ n und r′ ≤ n+ 1.Fall 1: Liegt b im Spaltenraum vonA, d.h. b im Spaltenraum von Λ, also rank(bΛ) = rank(Λ) =k + `, so gibt es ein u mit b + Λu = 0 (namlich u := −Λ∗b, wobei Λ∗ die Diagonaleintrageλi−1 hat), und wir berechnen c+ 2btu+ utΛu = c− btΛ∗b =: ¯c. In diesem Fall “1b” ist r′ = r
wenn ¯c = 0 ist, und sonst sind wir im Fall “1a”, mit r′ = r + 1.Fall 2: Liegt b nicht im Spaltenraum von A, d.h. b nicht im Spaltenraum von Λ, so hat q(x) alsoeinen linearen Term, und wir konnen c durch eine weitere Translation wegtransformieren.Insgesamt ergibt das den folgenden Normalformsatz:
Theorem 4.6 (Euklidische Hauptachsentransformation). Jede Quadrik im Rn (mit Ausnahmeder linearen Quadriken, also der Hyperebenen, sowie Q = ∅ und Q = Rn) lasst sich durcheine Isometrie auf eine der folgenden drei Typen von Normalformen bringen, fur k ≥ 1, ` ≥ 0,k + ` ≤ n, und 0 < a1 ≤ · · · ≤ ak, ak+1 ≥ · · · ≥ ak+` > 0:
(1a)x21a21
+ · · ·+ x2ka2k−x2k+1
a2k+1
− · · · −x2k+`a2k+`
= 1,
(1b)x21a21
+ · · ·+ x2ka2k−x2k+1
a2k+1
− · · · −x2k+`a2k+`
= 0 mit k ≥ ` und a1 = 1,
37
(2)x21a21
+ · · ·+ x2ka2k−x2k+1
a2k+1
− · · · −x2k+`a2k+`
= 2xk+`+1 mit k ≥ `, k + ` < n.
Hier ist r = k + `, und (1a) entspricht dem Fall r′ = r + 1, (1b) ist der Fall r′ = r, und (2) istder Fall r′ = r + 2.Dass man jede Quadrik auf eine dieser Normalformen transformieren kann, haben wir im We-sentlichen bewiesen; dafur kann man zunachst annehmen, dass entweder ¯c = 0 gilt, oder ¯c = 1(indem man namlich im Fall ¯c 6= 0 die Gleichung durch ¯c teilt, und ggf. (fur ¯c < 0) noch k und` vertauscht. Nun setzt man λi =: 1
a2ifur i ≤ k und λi =: − 1
a2ifur k < i ≤ k+`. Die Bedingung
k ≥ 1 schließt die linearen Quadriken aus.Eigentlich wurde man den Normalformsatz so formulieren, dass die Normalformen alle unter-schiedlich sind, und Quadriken mit unterschiedlicher Normalform, also mit unterschiedlichenDaten
[Typ, k, `, a1, a2, . . . , ak+`]
auch nicht ineinander transformierbar. Das ist fur die oben angegebene Formulierung nicht ganzrichtig, aus zwei Grunden:
1. die Quadriken der Form (1b) haben im Fall k = ` zusatzliche Aquivalenzen, und2. die Quadriken der Form (1b) fur ` = 0 sind lineare Unterraume, die fur k = 1 Hyper-
ebenen (also lineare Quadriken) sind, und fur k > 1 ist das Ergebnis unabhangig von denai.
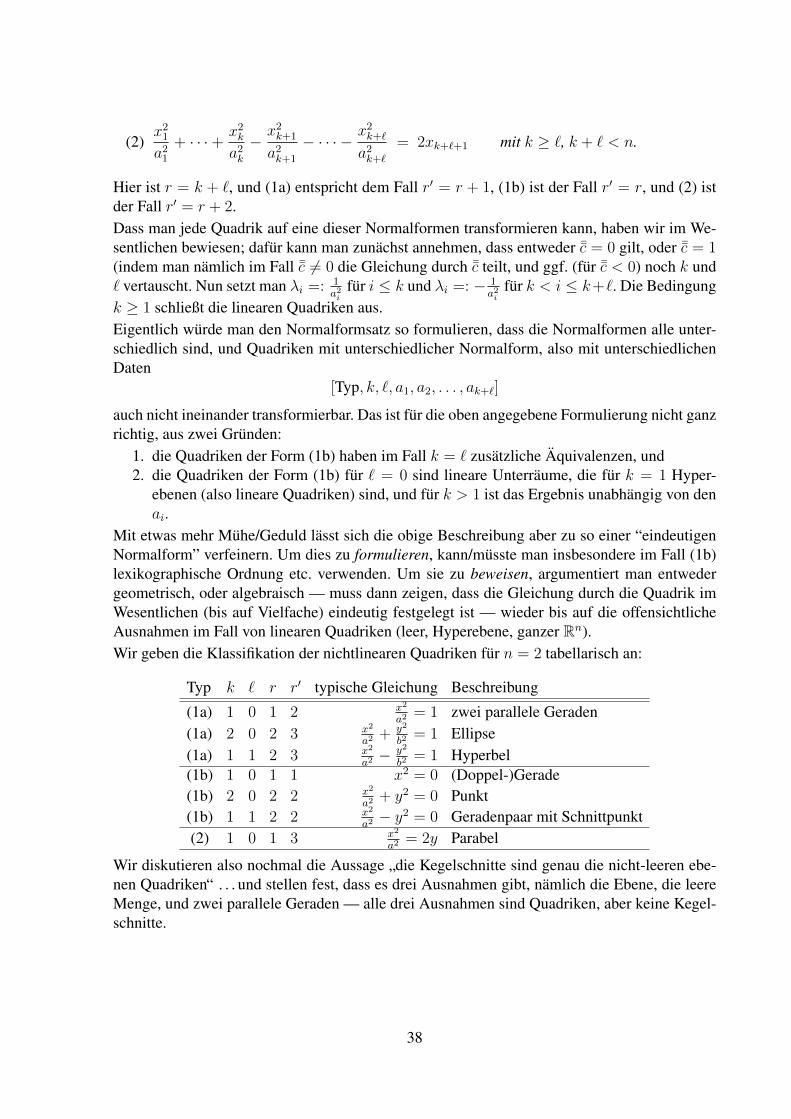
Mit etwas mehr Muhe/Geduld lasst sich die obige Beschreibung aber zu so einer “eindeutigenNormalform” verfeinern. Um dies zu formulieren, kann/musste man insbesondere im Fall (1b)lexikographische Ordnung etc. verwenden. Um sie zu beweisen, argumentiert man entwedergeometrisch, oder algebraisch — muss dann zeigen, dass die Gleichung durch die Quadrik imWesentlichen (bis auf Vielfache) eindeutig festgelegt ist — wieder bis auf die offensichtlicheAusnahmen im Fall von linearen Quadriken (leer, Hyperebene, ganzer Rn).Wir geben die Klassifikation der nichtlinearen Quadriken fur n = 2 tabellarisch an:
Typ k ` r r′ typische Gleichung Beschreibung
(1a) 1 0 1 2 x2
a2= 1 zwei parallele Geraden
(1a) 2 0 2 3 x2
a2+ y2
b2= 1 Ellipse
(1a) 1 1 2 3 x2
a2− y2
b2= 1 Hyperbel
(1b) 1 0 1 1 x2 = 0 (Doppel-)Gerade(1b) 2 0 2 2 x2
a2+ y2 = 0 Punkt
(1b) 1 1 2 2 x2
a2− y2 = 0 Geradenpaar mit Schnittpunkt
(2) 1 0 1 3 x2
a2= 2y Parabel
Wir diskutieren also nochmal die Aussage ”die Kegelschnitte sind genau die nicht-leeren ebe-nen Quadriken“ . . . und stellen fest, dass es drei Ausnahmen gibt, namlich die Ebene, die leereMenge, und zwei parallele Geraden — alle drei Ausnahmen sind Quadriken, aber keine Kegel-schnitte.
38
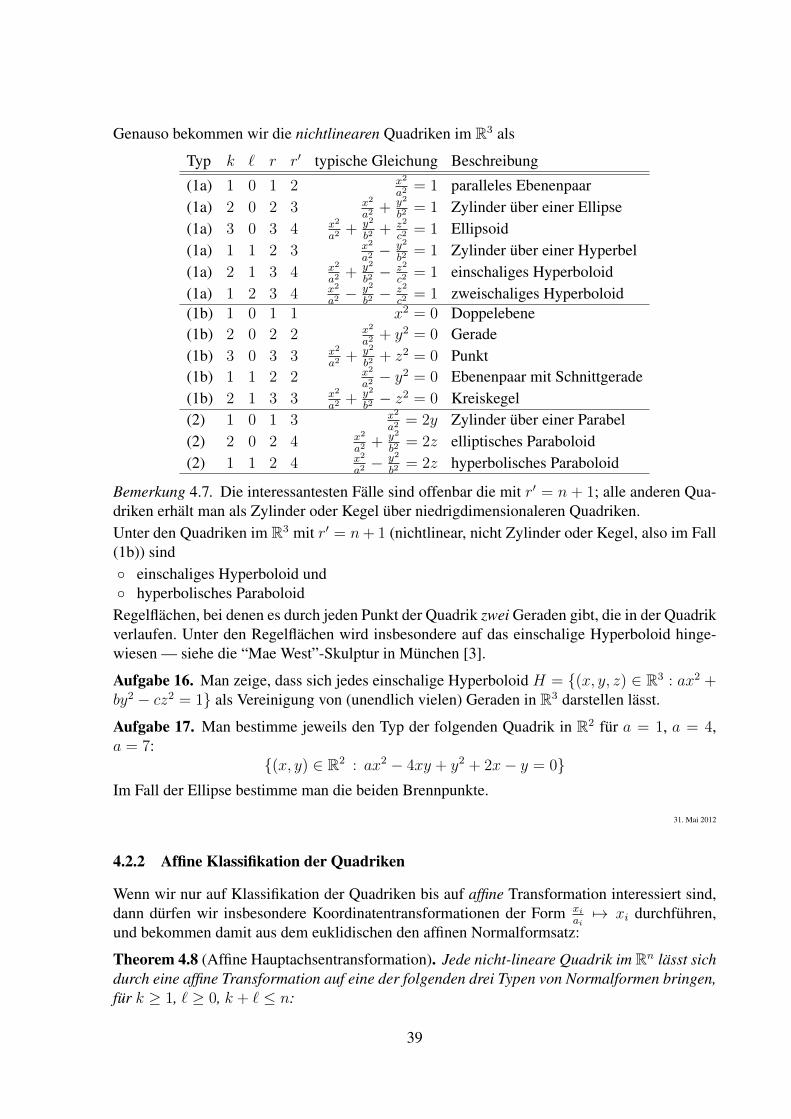
Genauso bekommen wir die nichtlinearen Quadriken im R3 als
Typ k ` r r′ typische Gleichung Beschreibung
(1a) 1 0 1 2 x2
a2= 1 paralleles Ebenenpaar
(1a) 2 0 2 3 x2
a2+ y2
b2= 1 Zylinder uber einer Ellipse
(1a) 3 0 3 4 x2
a2+ y2
b2+ z2
c2= 1 Ellipsoid
(1a) 1 1 2 3 x2
a2− y2
b2= 1 Zylinder uber einer Hyperbel
(1a) 2 1 3 4 x2
a2+ y2
b2− z2
c2= 1 einschaliges Hyperboloid
(1a) 1 2 3 4 x2
a2− y2
b2− z2
c2= 1 zweischaliges Hyperboloid
(1b) 1 0 1 1 x2 = 0 Doppelebene(1b) 2 0 2 2 x2
a2+ y2 = 0 Gerade
(1b) 3 0 3 3 x2
a2+ y2
b2+ z2 = 0 Punkt
(1b) 1 1 2 2 x2
a2− y2 = 0 Ebenenpaar mit Schnittgerade
(1b) 2 1 3 3 x2
a2+ y2
b2− z2 = 0 Kreiskegel
(2) 1 0 1 3 x2
a2= 2y Zylinder uber einer Parabel
(2) 2 0 2 4 x2
a2+ y2
b2= 2z elliptisches Paraboloid
(2) 1 1 2 4 x2
a2− y2
b2= 2z hyperbolisches Paraboloid
Bemerkung 4.7. Die interessantesten Falle sind offenbar die mit r′ = n + 1; alle anderen Qua-driken erhalt man als Zylinder oder Kegel uber niedrigdimensionaleren Quadriken.Unter den Quadriken im R3 mit r′ = n+ 1 (nichtlinear, nicht Zylinder oder Kegel, also im Fall(1b)) sind◦ einschaliges Hyperboloid und◦ hyperbolisches Paraboloid
Regelflachen, bei denen es durch jeden Punkt der Quadrik zwei Geraden gibt, die in der Quadrikverlaufen. Unter den Regelflachen wird insbesondere auf das einschalige Hyperboloid hinge-wiesen — siehe die “Mae West”-Skulptur in Munchen [3].
Aufgabe 16. Man zeige, dass sich jedes einschalige Hyperboloid H = {(x, y, z) ∈ R3 : ax2 +by2 − cz2 = 1} als Vereinigung von (unendlich vielen) Geraden in R3 darstellen lasst.
Aufgabe 17. Man bestimme jeweils den Typ der folgenden Quadrik in R2 fur a = 1, a = 4,a = 7:
{(x, y) ∈ R2 : ax2 − 4xy + y2 + 2x− y = 0}Im Fall der Ellipse bestimme man die beiden Brennpunkte.
31. Mai 2012
4.2.2 Affine Klassifikation der Quadriken
Wenn wir nur auf Klassifikation der Quadriken bis auf affine Transformation interessiert sind,dann durfen wir insbesondere Koordinatentransformationen der Form xi
ai7→ xi durchfuhren,
und bekommen damit aus dem euklidischen den affinen Normalformsatz:
Theorem 4.8 (Affine Hauptachsentransformation). Jede nicht-lineare Quadrik im Rn lasst sichdurch eine affine Transformation auf eine der folgenden drei Typen von Normalformen bringen,fur k ≥ 1, ` ≥ 0, k + ` ≤ n:
39
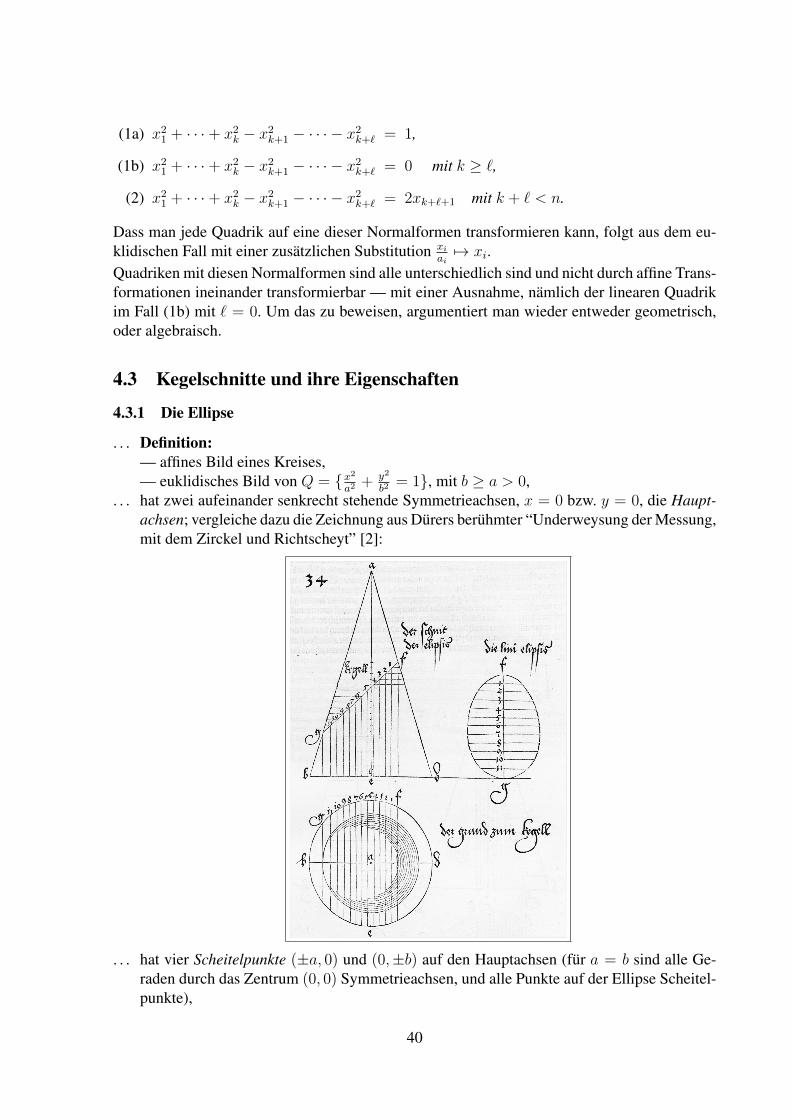
(1a) x21 + · · ·+ x2k − x2k+1 − · · · − x2k+` = 1,
(1b) x21 + · · ·+ x2k − x2k+1 − · · · − x2k+` = 0 mit k ≥ `,
(2) x21 + · · ·+ x2k − x2k+1 − · · · − x2k+` = 2xk+`+1 mit k + ` < n.
Dass man jede Quadrik auf eine dieser Normalformen transformieren kann, folgt aus dem eu-klidischen Fall mit einer zusatzlichen Substitution xi
ai7→ xi.
Quadriken mit diesen Normalformen sind alle unterschiedlich sind und nicht durch affine Trans-formationen ineinander transformierbar — mit einer Ausnahme, namlich der linearen Quadrikim Fall (1b) mit ` = 0. Um das zu beweisen, argumentiert man wieder entweder geometrisch,oder algebraisch.
4.3 Kegelschnitte und ihre Eigenschaften
4.3.1 Die Ellipse
. . . Definition:— affines Bild eines Kreises,— euklidisches Bild von Q = {x2
a2+ y2
b2= 1}, mit b ≥ a > 0,
. . . hat zwei aufeinander senkrecht stehende Symmetrieachsen, x = 0 bzw. y = 0, die Haupt-achsen; vergleiche dazu die Zeichnung aus Durers beruhmter “Underweysung der Messung,mit dem Zirckel und Richtscheyt” [2]:
. . . hat vier Scheitelpunkte (±a, 0) und (0,±b) auf den Hauptachsen (fur a = b sind alle Ge-raden durch das Zentrum (0, 0) Symmetrieachsen, und alle Punkte auf der Ellipse Scheitel-punkte),
40

. . . hat Brennpunkte F = (c, 0) und F ′ = (−c, 0), fur c :=√a2 − b2
(hier verwenden wir a ≥ b; fur a = b fallen die Brennpunkte zusammen).
Proposition 4.9 (Drei Eigenschaften/Charakterisierungen der Brennpunkte).
• [“Gartner-Konstruktion”] Fur alle Punkte P = (x0, y0) auf der Ellipse gilt
d(F, P ) + d(P, F ′) = 2a.
• [Reflexionseigenschaft] Lichtstrahlen, die von einem Brennpunkt ausgehen, und in derEllipse reflektiert werden, gehen durch den anderen Brennpunkt; das heißt, die StreckenFP und F ′P haben denselben Winkel zur Tangente an die Ellipse in P .
x
y
0−c c−a a
−b
b P
• [Dandelin’sche Kugeln] 3-dimensionale geometrische Konstruktion
Lemma 4.10 (Tangentengleichung). Die Tangente ` an die Ellipse x2
a2+ y2
b2= 1 im Punkt
P = (x0, y0) ist gegeben durchxx0a2
+yy0b2
= 1.
41

Beweis. Ein Punkt (x, y), der wie P sowohl auf Q als auch auf ` liegt, erfullt
x2
a2+y2
b2= 1
xx0a2
+yy0b2
= 1
x20a2
+y20b2
= 1
und damit(x− x0)2
a2+
(y − y0)2
b2= 0
also x = x0 und y = y0.
Zwei ”affine“ Satze uber Ellipsen:
Proposition 4.11. [1, Sect. 2.2.3] Die Mittelpunkte der Schnitte einer Ellipse mit einer Paral-lelenschar liegen auf einem Durchmesser.
Aufgabe 18. Sei Q eine Ellipse und P ein Punkt in der Ellipse. Beschreiben Sie die Kurve, aufder die Mittelpunkte der Schnittsegmente der Ellipse mit den Geraden durch P liegen.
Proposition 4.12. [1, Sect. 2.2.3] Zu jedem Durchmesser ` einer Ellipse gibt es einen anderenDurchmesser `′ so dass:• Die Mittelpunkte der Sehnen, die zu ` parallel sind, liegen auf `′,• die Mittelpunkte der Sehnen, die zu `′ parallel sind, liegen auf `.
4.3.2 Die Hyperbel
. . . Definition:— affines Bild Standardhyperbel xy = 1,— euklidisches Bild von Q = {x2
a2− y2
b2= 1}, mit a, b > 0,
. . . hat zwei aufeinander senkrecht stehende Symmetrieachsen, x = 0 bzw. y = 0, die Haupt-achsen,
. . . hat zwei Scheitelpunkte (±a, 0) auf den Hauptachsen,
. . . hat Brennpunkte F = (c, 0) und F ′ = (−c, 0), fur c :=√a2 + b2,
. . . hat zwei Asymptoten, die durch x2
a2− y2
b2= 0 gegeben sind, also bx ± ay = 0, und denen
sich die Hyperbelaste annahern,. . . Konstruktion der Brennpunkte mit dem Zirkel! (Verwende Kreise mit Mittelpunkt (±a, 0)
durch (0,±b))
Proposition 4.13 (Zwei Charakterisierungen der Brennpunkte).
• [“Gartner-Konstruktion”] Fur alle Punkte P = (x0, y0) auf der Hyperbel gilt
|d(F, P )− d(P, F ′)| = 2a.
• [Reflexionseigenschaft] Lichtstrahlen, die auf einen Brennpunkt zielen, aber in der Hy-perbel reflektiert werden, zielen dann auf den anderen Brennpunkt; das heißt, die StreckenFP und F ′P haben denselben Winkel zur Tangente an die Hyperbel in P .
42

x
y
0 a−a
−b
−c c
P
Lemma 4.14 (Tangentengleichung). Die Tangente an die Hyperbel x2
a2− y2
b2= 1 im Punkt
P = (x0, y0) ist gegeben durchxx0a2− yy0
b2= 1.
1. Juni 2012
Aufgabe 19. Haben eine Hyperbel und eine Ellipse dieselben Brennpunkte, so haben sie vierSchnittpunkte, und sie schneiden sich in diesen senkrecht.
4.3.3 Die Parabel
. . . Definition:— affines Bild der Standardparabel y = x2,— euklidisches Bild von Q = {y = ax2}, mit a > 0,
. . . hat nur eine Symmetrieachse, y = 0.
. . . der Scheitelpunkt ist (0, 0),
. . . der Brennpunkt ist F = (0, c), fur c := 14a
,. . . die Leitgerade ist L = {y = −c}.
Proposition 4.15 (Zwei Charakterisierungen der Brennpunkte).
• [Parabolspiegel!] Fur alle Punkte P = (x0, y0) auf der Parabel gilt
d(F, P ) = d(P,L).
• [Reflexionseigenschaft] Lichtstrahlen, die vom Brennpunkt ausgehen, und in der Parabelreflektiert werden, sind danach parallel zur Symmetrieachse.
43
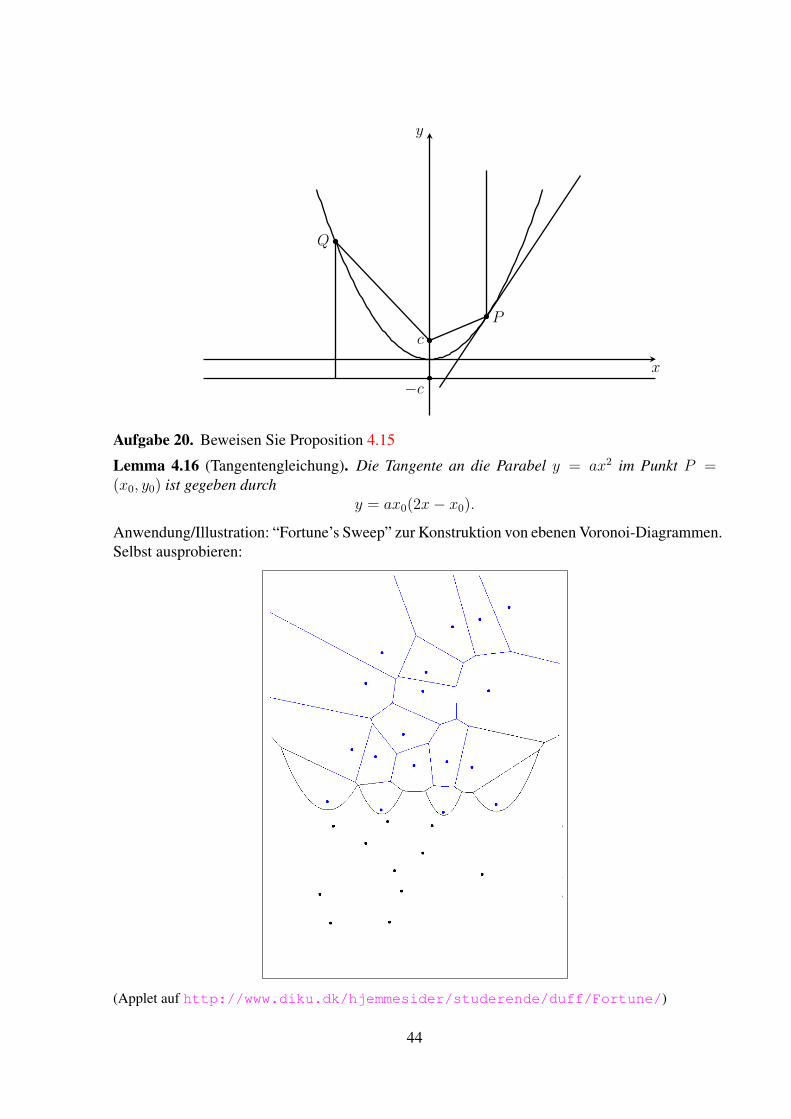
x
y
c
−c
P
Q
Aufgabe 20. Beweisen Sie Proposition 4.15
Lemma 4.16 (Tangentengleichung). Die Tangente an die Parabel y = ax2 im Punkt P =(x0, y0) ist gegeben durch
y = ax0(2x− x0).
Anwendung/Illustration: “Fortune’s Sweep” zur Konstruktion von ebenen Voronoi-Diagrammen.Selbst ausprobieren:
(Applet auf http://www.diku.dk/hjemmesider/studerende/duff/Fortune/)
44
[1] David A. Brannan, Matthew F. Esplen, and Jeremy J. Gray. Geometry. Cambridge University Press,Cambridge, 1999.
[2] Albrecht Durer. Unterweysung der Messung mit dem Zyrkel und Rychtscheydt. Nurnberg, 1525.http://de.wikisource.org/wiki/Underweysung_der_Messung,_mit_dem_Zirckel_und_Richtscheyt,_in_Linien,_Ebenen_unnd_gantzen_corporen/Erstes_Buch.
[3] Gunter M. Ziegler. Mathematik im Alltag: Der Name der Rose. Mitteilungen der DMV, 19(1):42–44, 2011. http://www.mathematik.de/ger/presse/ausdenmitteilungen/artikel/mdmv-19-1-042.pdf.
45
5 Projektive Geometrie
5.1 Motivation• Affine Geometrie: Punkte ”im Unendlichen“, so dass sich zwei Geraden in einer Ebe-
ne immer in einem Punkt schneiden; es gibt keine Parallen; perfekte Dualitat zwischenPunkten und Hyperebenen• ”Gebrochen-lineare“ Transformationen konnen Geometrie vereinfachen, aber schieben
”Hyperebenen nach Unendlich“• Was passiert, wenn man bei Kegelschnitten die Ebene stetig verandert?
Ellipse→ Parabel→ Hyperbel?• Zentralprojektion: Streckenverhaltnisse andern sich, aber “Doppelverhaltnisse” bleiben
gleich.Was haben wir davon? Geometrie mit• perfekter Dualitat• vielen Transformationen, also vielen Moglichkeiten zur Vereinfachung• Matrix-Beschreibung fur Transformationen
5.2 Der n-dimensionale projektive Raum
5.2.1 Definition; mehrere Modelle
Definition 5.1 (Der n-dimensionale projektive Raum). Der n-dimensionale projektive RaumRPn ist die Menge
RPn := {L ⊆ Rn+1 : L ist ein 1-dimensionaler linearer Unterraum}.
aller 1-dimensionalen Unterraume im Vektorraum Rn+1.Fur −1 ≤ k ≤ n sind die k-dimensionalen projektiven Unterraume die Teilmengen
P (U) := {L ∈ RPn : L ⊆ U} fur (k + 1)-dimensionale Unterraume U ⊆ Rn+1.
Achtung: die projektive Dimension von P (U) ist also gegeben durch
dimP (U) = dimU − 1.
7. Juni 2012
Bemerkung 5.2 (Mehrere Modelle). Den Projektiven Raum RPn konnen wir aquivalent betrach-ten als(1) Raum der eindimensionalen Unterraume im Rn+1, wie hier definiert,(2) die Menge der Vektoren in Rn+1 \ {0}, modulo Identifikation von Vielfachen,(3) die Sphare Sn ⊂ Rn+1 modulo Identifizierung gegenuberliegender Punkte, oder(4) affiner Raum Rn plus “Punkte im Unendlichen”.
Wichtig sind die Ubersetzungen zwischen diesen Modellen, wobei wir identifizieren:(1) einen eindimensionalen Unterraume im Rn+1 mit(2) den nicht-verschwindenden Vektoren in den Unterraum, bzw.
46

(3) den (beiden) Vektoren der Lange 1 in dem Unterraum,(4) dem Vektor in dem Unterraum mit x0-Koordinate 1, bzw. sonst einer Richtung (d.h. einem
Element von RPn−1).Notation: Wir konnen x fur einen Punkt im Rn schreiben, dann
v = x :=(1x
)fur den entsprechenden Punkt in 1× Rn ⊂ Rn+1, und
p = [v] := spanR{v}
fur den Punkt in RPn, der durch ein beliebiges v ∈ Rn+1, v 6= 0, gegeben ist.
Lemma 5.3. Zwei verschiedene Geraden G1, G2 ⊂ RP2 schneiden sich in genau einem Punkt.
5.3 Projektive Transformationen
Definition 5.4 (Projektive Transformationen; Projektivitaten). Eine Abbildung f : RPm →RPn heißt projektiv, wenn sie durch eine lineare Abbildung f : Rm+1 → Rn+1, x 7→ Mxinduziert wird, fur M ∈ R(n+1)×(m+1). (Insbesondere muss dann x 7→Mx injektiv sein, A alsovollen Rang m haben, insbesondere also m ≤ n gelten.)Eine projektive Transformation (oder Projektivitat) ist eine projektive Abbildung f : RPn →RPn. (Projektivitaten sind also die bijektiven projektiven Abbildungen.)
Lemma 5.5. Die projektiven Transformationen RPn → RPn eingeschrankt auf Rn ⊂ RPn
sind genau die ”gebrochen-linearen“ Transformationen x 7→ Ax+bctx+δ
fur nichtsingulare Matrix(δ ct
b A
).
Beweis. (1x
)7−→
(δ ct
b A
)(1x
)=
(ctx+ δAx+ b
)∼(
1Ax+bctx+δ
).
Beachte:◦ Die gebrochen-lineare Abbildung x 7→ Ax+b
ctx+δist fur c 6= 0 nur außerhalb der Hyperebene
H := {x : ct + δ = 0} definiert. Interpretation: diese bildet H ”nach Unendlich“ ab.◦ In einer projektiven Transformation kannA ∈ Rn×n singular sein, aber es gilt rankA ≥ n−1.
◦ Vielfache der Matrix(δ ct
b A
)erzeugen dieselbe projektive Transformation.
Definition 5.6. Eine projektive Quadrik ist eine Teilmenge Q ⊂ RPn der Form
Q = {[v] ∈ RPn : vtMv = 0}
fur eine symmetrische Matrix M ∈ R(n+1)×(n+1), M 6= 0.
Aufgabe 21. (i) Fur jede projektive Quadrik Q ⊂ RPn ist Q := Q∩Rn eine affine Quadrik.
47

(ii) Welche Quadriken treten als Q auf? Das heißt, fur welche affine Quadriken Q gibt es eineprojektive Quadrik Q mit Q ∩ Rn = Q?Ist Q in diesem Fall eindeutig?
Proposition 5.7 (Invarianten). Projektive Transformationen(i) bilden projektive Unterraume auf projektive Unterraume (derselben Dimension!) ab,
(ii) bilden projektive Quadriken auf projektive Quadriken ab.
Definition 5.8 (Projektive Basis). Eine projektive Basis des RPn besteht aus n + 2 Punktenp0, p1, . . . , pn+1, von denen keine n + 1 auf einer Hyperebene (also in einem Unterraum derDimension n− 1) liegen.
Proposition 5.9 (Erster Hauptsatz der Projektiven Geometrie). Seien (p0, p1, . . . , pn+1) und(p′0,
′1 , . . . , p
′n+1) zwei (geordnete) projektive Basen des RPn, so gibt es genau eine projektive
Abbildung f : RPn → RPn, die pi auf p′i abbildet (0 ≤ i ≤ n+ 1).
8. Juni 2012
Beweis. Seien pi bzw. p′i entsprechende Vektoren im Rn+1. Dann gibt es lineare Abhangigkeitenλ0p0 + · · · + λn+1pn+1 und λ′0p
′0 + · · · + λ′n+1p
′n+1, die beide bis auf Vielfache eindeutig sind,
und deren Koeffizienten nicht Null sind. Weiter sind (λ0p0, . . . , λnpn) und (λ′0p′0, . . . , λ
′np′n)
Basen des Rn+1, so dass λipi 7→ λ′ip′i eine eindeutige lineare Abbildung definiert. Die linearen
Abhangigkeiten garantieren dann, dass λn+1pn+1 7→ λ′n+1p′n+1.
Aufgabe 22. Beschreiben Sie die gebrochen-linearen Abbildungen, die die folgenden geordne-ten Basen aufeinander abbilden:
(i) (0, 0), (1, 0), (1, 1), (0, 1) → (0, 0), (1, 0), (0, 1), (13, 13),
(ii) (0, 0), (1, 0), (1, 1), (0, 1) → (0, 0), (1, 0), (0, 1), (1, 1).
Aufgabe 23. Beschreiben Sie die gebrochen-linearen Abbildungen, die die folgenden geordne-ten affinen Quadriken aufeinander abbilden:◦ den Einheiskreis K = {(x, y) ∈ R2 : x2 + y2 = 1},◦ die Normalparabel P = {(x, y) ∈ R2 : x2 = y} und◦ die Hyperbel H = {(x, y) ∈ R2 : y2 − x2 = 1}.Wie sehen die zugehorigen linearen Transformationen im R3 aus?Geben Sie eine stetige Familie von projektiven Transformationen an (als gebrochen-lineare Ab-bildungen auf R2, bzw. als lineare Transformationen des R3, die die drei Quadriken verbindet).
Korollar 5.10. Die projektiven Transformationen auf dem RPn bilden eine Gruppe.Diese ist gegeben durch lineare Transformationen auf dem Rn+1 modulo Dilatationen, also
PGL(n,R) = GL(n+ 1,R)/R∗
Die Dimension dieser Gruppe, also auch die Anzahl der Freiheitsgrade, die wir fur eine projek-tive Transformation haben, ist (n+ 1)2 − 1 = (n+ 2)n.
Beispiel 5.11. In der Ebene, kann man mit projektiven Transformationen jedes Dreieck aufjedes Dreieck abbilden, und jedes Viereck auf ein beliebiges Viereck (z.B. ein Einheitsquadrat),aber nicht jedes Funfeck auf ein beliebiges (z.B. das regelmaßige) Funfeck.
48

Korollar 5.12 (Projektive Koordinaten). Die Vektoren e0, e1, . . . , en, e0 + · · · + en ∈ Rn+1
induzieren eine geordnete projektive Basis im RPn.Ist nun (p0, . . . , pn+1) eine beliebige geordnete Basis des RPn, so gibt es eine eindeutige Pro-jektivitat nach Hauptsatz 5.9. Diese induziert Koordinaten
(1 : 0 : 0 : · · · : 0) fur p0,(0 : 1 : 0 : · · · : 0) fur p1,
. . .(0 : 0 : 0 : · · · : 1) fur pn,(1 : 1 : 1 : · · · : 1) fur pn+1,
wobei die Notation (x0 : x1 : x2 : · · · : xn) betont, dass diese Vektoren von “Koordinaten” nurbis auf Vielfache definiert sind.
Mit diesen projektiven Koordinaten kann man rechnen. So entsprechen die Koordinatenvektorenmit xn 6= 0 (ohne Einschrankung der Allgemeinheit: xn = 1) genau den Punkten im affinenRaum Rn ⊆ RPn, wahrend die Koordinatenvektoren mit xn = 0 genau den Punkten “imUnendlichen” entsprechen. Punkte, die auf einer Hyperebene liegen, erfullen eine homogenelineare Gleichung, usw.
5.4 Das Doppelverhaltnis
Definition 5.13 (Doppelverhaltnis). Seien a, b, c, d ∈ RPn vier Punkte im RPn, die auf einerGeraden liegen, mit a 6= b.Dann konnen wir c = αa+ βb, d = γa+ δb schreiben.Das Doppelverhaltnis ist dann
[a, b; c, d] :=β/α
δ/γ=
βγ
αδ∈ R ∪ {∞}.
Lemma 5.14. Das Doppelverhaltnis ist wohl-definiert.
Beweis. Fur den Beweis wahlen wir a, b, c, d ∈ Rn+1 \ {0}, und beobachten, dass sich dasDoppelverhaltnis nicht verandert, wenn wir die Vektoren a, b, c, d durch Vielfache ersetzen.
15. Juni 2012
Lemma 5.15. Wir identifizieren RP1 = R ∪ {∞}. Seien a, b, c, d ∈ RPn vier Punkte auf einerGeraden, wobei a, b, c paarweise verschieden sein sollen. Dann gibt es genau eine projektiveAbbildung f : RP1 → RPn (die also den Punkten auf der Gerade eine “projektive Koordi-nate” zuordnet) mit f(∞) = a, f(0) = b und f(1) = c. Unter dieser Abbildung ist dannf([a, b; c, d]) = d, die durch a, b, c festgelegte “projektive Koordinate” auf der Geraden ist alsofur d durch das Doppelverhaltnis gegeben.
Lemma 5.16. Affine Teilungsverhaltnisse sind Doppelverhaltnisse: Liegen b, c, d auf einer affi-nen Geraden, a “im Unendlichen” auf der Geraden, mit d = (1 − λ)b + λc, b 6= c, so konnenwir a = c− b setzen, also c = a+ b und d = λa+ b, und das ergibt [a, b; c, d] = λ.Kurz also: [∞, b; c, (1− λ)b+ λc] = λ.
49

Bemerkung 5.17. Wir konnen das Doppelverhaltnis immer dann definieren, wenn die vier Punk-te a, b, c, d kollinear sind, und mindestens drei von ihnen verschieden. Falls a = b ist, setzen wirdafur [a, a; c, d] = 1.
Aufgabe 24. Wie mussen vier verschiedene Punkte a, b, c, d auf einer (projektiven) Geradenliegen, damit das Doppelverhaltnis [a, b; c, d] positiv ist? Und wann gilt [a, b; c, d] < 0.
Theorem 5.18 (Invarianten). Projektive Transformationen erhalten Doppelverhaltnisse. Sindalso unter a, b, c, d ∈ RPm mindestens drei verschiedene Punkte, und ist f : RPm → RPn, sogilt
[a, b; c, d] = [f(a), f(b); f(c), f(d)].
Beweis. Wir stellen a, b, c, d dar durch a, b, c, d ∈ Rm+1, und f durch A ∈ R(n+1)×(m+1). Giltc = αa + βb, d = γa + δb, so folgt Ac = αAa + βAb, Ad = γAa + δAb, und damit ergebenf(a), f(b), f(c), f(d) dieselben Parameter α, β, γ, δ und damit auch dasselbe Doppelverhaltnis.Im Fall a = b argumentiert man separat.
Proposition 5.19. Seien a, b, c, d ∈ Rn mit [a, b; c, d] = λ. Dann gilt(1) [a, b; c, d] = [b, a; d, c] = [c, d; a, b] = [d, c; b, a] = λ,(2) [a, b; d, c] = [b, a; c, d] = 1
λ,
(3) [a, c; b, d] = 1− λ(4) und damit sind alle anderen Werte des Doppelverhaltnisses einer Permutation der vier
Punkte festgelegt; dabei konnen nur 6 verschiedene Werte auftreten, namlich λ, 1λ
, 1 − λ,1− 1
λ, 11−λ und λ
λ−1 .
Beweis. Wegen Theorem 5.18 genugt es, dies fur n = 1 zu beweisen.(1) und (4) folgen aus (2) und (3).Dabei ist (2) ziemlich offensichtlich, wahrend (3) auf eine polynomiale Identitat zwischen De-terminanten hinauslauft, eine “3-Term Grassmann-Plucker-Identitat”.
Proposition 5.20 (Zentralprojektion). Sind a, b, c, d und A,B,C,D jeweils kollineare Punkte,so dass sich die Geraden aA, bB, cC, dD schneiden (bzw. so dass es einen Punkt o gibt, dernicht auf den beiden Geraden abcd und ABCD liegt und oaA, obB, ocC, odD kollinear sind),so gilt [a, b, c, d] = [A,B,C,D].
Beweis. Wegen Theorem 5.18 genugt es, dies fur n = 2 zu beweisen.Man konstruiert leicht eine projektive Transformation (“Zentralprojektion”), die o festhalt unda auf A und b auf B abbildet, und so weiter: Dafur arbeiten wir wieder im Rn+1, erganzen dorto, a, b zu einer Basis, und legen die lineare Abbildung Rn+1 → Rn+1 dadurch fest, dass wir oauf sich selbst abbilden und a 7→ A, b 7→ B, und die weiteren Basisvektoren (fur n > 2) wiederauf sich selbst. Die lineare Abbildung induziert eine projektive Abbildung mit o 7→ o, a 7→ Aund b 7→ B. Diese erhalt Kollinearitaten, also wird c auf C und d auf D abgebildet. Beweisunvollstandig, muss noch erganzt werden! Und dann konnen wir Theorem 5.18 anwenden.
Projektive Abbildungen erhalten Doppelverhaltnisse. Es gilt aber auch eine Umkehrung:
Theorem 5.21 (Zweiter Hauptsatz der Projektiven Geometrie). Jede bijektive Abbildung f :RPm → RPn, die kollineare Punkte auf kollineare Punkte (also Geraden auf Geraden) abbildetund Doppelverhaltnisse erhalt, ist eine projektive Abbildung.
50

Bemerkung: fur n ≥ 2 braucht man die Bedingung uber Doppelverhaltnisse nicht, dann mussman fur den Beweis aber signifikant harter arbeiten; siehe Fischer [2, Abschnitt 3.3]. Es sinddie bijektiven Abbildungen, die Kollinearitaten erhalten (“Kollineationen”) also genau die,die durch lineare Abbildungen induziert sind (“Projektivitaten”). Im Fall, dass man Geome-trie uber einem allgemeinen Korper K arbeitet, muss man weiterhin Korperautomorphismenberucksichtigen, die ebenfalls Kollinearitaten induzieren.
Aufgabe 25. Definieren Sie die projektive Geometrie CP2 und ihre Geraden. Zeigen Sie, dasssich zwei verschiedene Geraden immer in genau einem Punkt schneiden.Definieren Sie Kollinearitaten sowie projektive Abbildungen. Zeigen Sie, Zeigen Sie, dass dieKonjugation z 7→ z eine Kollinearitat CP2 → CP2 induziert, die aber keine Projektivitat ist.
5.5 Projektive Inzidenzgeometrie
5.5.1 Schnitt und Verbindung
Seien U, V ⊂ RPn projektive Unterraume, dann ist der Schnitt U ∧ V := U ∩ V wiederprojektiver Unterraum. Dieser ist auch der großte Unterraum, der sowohl in U als auch in Venthalten ist. In dieser Charakterisierung wird er auch als Meet von U und V bezeichnet und alsU ∧ V notiert.Aber U ∪ V ist ublicherweise kein projektiver Unterraum.
Definition 5.22 (Verbindung). Die Verbindung (oder auch der Join) U∨V von zwei projektivenUnterraumen U, V ⊂ RPn ist der Schnitt aller projektiven Unterraume, die U ∪ V enthalten.
Proposition 5.23 (Dimensionsformel: Modulare Gleichung). Fur beliebige projektive UnterraumeU, V ⊂ RPn gilt
dimU + dimV = dim(U ∧ V ) + dim(U ∨ V ).
Beweis. Dies folgt sofort aus der Dimensionsformel fur lineare Unterraume U , V ⊆ Rn+1 furlineare Unterraume, mit dimP (U) = dimU − 1 fur P (U) = U usw.
Korollar 5.24. Gilt dimU + dimV ≥ n fur U, V ⊆ RPn, so folgt U ∩ V 6= ∅.
Korollar 5.25. Sei H ⊂ RPn eine Hyperebene und p ∈ RPn \H . Dann schneidet jede Geradedurch p die Hyperebene H in einem einzigen Punkt.
5.5.2 Dualitat
Theorem 5.26. Fur jedes n ≥ 0 gibt es eine Abbildung, die jedem projektiven Unterraum vonU ⊆ Rn einen projektiven Unterraum U∗ ⊆ RPn zuordnet mit• dimU∗ = n− 1− dimU ,• (U∗)∗,• U ⊆ V ⇔ V ∗ ⊆ U∗,• U ∧ U∗ = ∅, U ∨ U∗ = RPn.
Die Abbildung U 7→ U∗ heißt auch Dualitatsabbildung. Sie bildet insbesondere Punkte aufHyperebenen ab, und umgekehrt.
51
Beweis. Fur U = P (U) setze U∗ := P (U⊥).
Damit ubersetzt sich jedes Inzidenztheorem in ein duales Inzidenztheorem. Beispiele:(i) Zwei verschiedene Geraden im RP2 schneiden sich in genau einem Punkt←→
Zwei verschiedene Punkte im RP2 liegen auf genau einer Gerade(ii) n Geraden in allgemeiner Lage im RP2 bestimmen
(n2
)Schnittpunkte←→
n Punkte in allgemeiner Lage im RP2 liegen auf(n2
)Verbindungsgeraden
(iii) n Punkte in der projektiven Ebene, nicht alle auf einer Geraden, bestimmen immer eineVerbindungsgerade, die genau zwei der Punkte enthalt←→nGeraden in der projektiven Ebene, nicht alle durch einen Punkt, bestimmen immer einenSchnittpunkt, der auf genau zwei Geraden liegt(das ist der Satz von Sylvester–Gallai, siehe [1, Kap. 10])
(iv) Drei Ebenen im RP3 haben immer einen gemeinsamen Punkt←→Drei Punkte im RP3 liegen immer auf einer Ebene.
(v) etc.
Aufgabe 26. Welche mogliche Konfigurationen gibt es fur drei Geraden im RP3?Und fur drei 2-dimensionale Unterraume im RP5?
5.5.3 Pappus und Desargues
Theorem 5.27 (Satz von Pappus). Sind A,B,C Punkte auf einer Geraden G und A′, B′, C ′
Punkte auf einer Geraden G′, und ist γ der Schnittpunkt von AB′ mit A′B, β der Schnittpunktvon AC ′ mit A′C, α der Schnittpunkt von BC ′ mit B′C, so sind α, β, γ kollinear.
Beweis. Nach projektiver Transformation (!) durfen wir annehmen, dass αγ die Gerade imUnendlichen ist.Schneiden sich G und G′ in der affinen Ebene, so betrachtet man die affinen Streckungen ϕ :A 7→ B und ψ : B 7→ C mit Zentrum G∩G′. Affine Streckungen erhalten Parallelitat, also giltϕ : B′ 7→ A′ und ψ : C ′ 7→ B. Also ψ◦ϕ : A 7→ C, ϕ◦ψ : C ′ 7→ A′. Es gilt aber ψ◦ϕ = ϕ◦ψ.Sind G und G′ parallel, so argumentiert man separat.
Beobachtung: Kommutativitat spielt eine entscheidende Rolle im Beweis. (In der Tat ist derSatz von Pappus fur projektive Geometrie uber einem Schiefkorper nicht richtig.)
Theorem 5.28 (Satz von Desargues). Dreiecke ABC und A′B′C ′ sind perspektivisch (also dieVerbindungsgeraden entsprechender Ecken AA′, BB′, CC ′ konkurrent) dann und nur dannwenn die Schnittpunkte α = BC ∩ B′C ′ β = AC ∩ A′C ′ γ = AB ∩ A′B′ der entsprechendenSeiten kollinear sind.
21. Juni 2012
Beweis. Fur “⇐=”: Nach projektiver Transformation liegen α, β, γ auf der Geraden im Un-endlichen. Also ist AB‖A′B′, AC‖A′C ′ und BC‖B′C ′. Damit sind die Dreiecke ABC undA′B′C ′ ahnlich, ihr Zentrum kann durch Schnitt von Geraden ausgerechnet werden.Dabei verwendet man das “Lemma von Thales”, wonach parallele Geraden auf unterschiedli-chen Geraden dieselben Teilungsverhaltnisse induzieren — was man nachrechnen kann.Fur “=⇒”: Dualitat!
52

Beobachtung: Arithmetik spielt eine entscheidende Rolle im Beweis. (In der Tat ist der Satzvon Desargues fur “synthetische” projektive Ebenen nicht richtig.) Es gibt einen 3D-Beweis furden Satz von Desargues – aber in der Tat lasst sich jede “synthetische” projektive Raum derDimension n ≥ 3 uber einem Schiefkorper koordinatisieren.
Bemerkung 5.29. Vorsicht bei der Formulierung mit degenerierten Versionen!Vergleiche Richter-Gebert [4, Example 1.1]:
Bemerkung 5.30. Es gibt vielfaltige Verallgemeinerungen: So kann man im Satz von Pappusdie Vereinigung der beiden GeradenG∪G′ durch einen beliebigen Kegelschnitt ersetzen (“Satzvon Pascal” http://de.wikipedia.org/wiki/Satz_von_Pascal)!
5.6 Quadriken
Theorem 5.31 (Projektive Hauptachsentransformation). Jede Quadrik im Rn (mit Ausnahmeder linearen Quadriken, also der Hyperebenen, sowie Q = ∅ undQ = Rn) lasst sich durch eine(d.h., gebrochen-lineare) projektive Transformation auf eine Normalform der Form
1 + x21 + · · ·+ x2k − x2k+1 − · · · − x2k+` = 0,
mit k + 1 ≥ ` ≥ 1, k + ` ≤ n bringen.In projektiven Koordinaten:
Q = {(x0 : x1 : · · · : xn) ∈ RPn : x20 + · · ·+ x2k − x2k+1 − · · · − x2k+` = 0}
mit k + 1 ≥ ` ≥ 1, k + ` ≤ n.
53

Beweis. Wir schreiben Q als
Q = {x ∈ Rn : (1, xt)
(c bt
b A
)(1x
)= 0}
= {x ∈ Rn : (1, xt)A
(1x
)= 0}
fur A ∈ Rn×n symmetrisch, b ∈ Rn, c ∈ R, bzw. A ∈ R(n+1)×(n+1) symmetrisch.Weil A symmetrisch ist, gibt es eine orthogonale Matrix S ∈ O(n + 1) so dass StAS diagonalist, also gleich diag(λ0, λ1, . . . , λk,−λk+1, . . . ,−λk+`, 0, . . . , 0) mit λi > 0, und dann eineDiagonalmatrix D ∈ R(n+1)×(n+1) mit Diagonaleintragen 1/
√λi fur 0 ≤ i ≤ k + `, so dass
DStASD = diag(1, . . . , 1,−1, . . . ,−1, 0, . . . , 0).
Die Tatsache, dass bei dieser Koordinatentransformation k und ` eindeutig bestimmt sind, fol-gert man aus Sylvester’scher Tragheitssatz [2, S. 186] [3, S. 362]: k+ 1 ist namlich die Dimen-sion des großten Unterraums von Rn+1, auf dem die quadratische Form xtAx positiv definit ist,und genauso fur ` und negativ definit.Die Bedingung k + 1 ≥ ` stellt man her, indem man ggf. A durch −A ersetzt.
Aufgabe 27. Welche Quadrik wird durch x0x1+x1x2+x2x0 = 0 im RP2 bzw. im R2 definiert?Welche Quadrik wird durch x0x1 + x1x2 + x2x3 + x3x0 = 0 im RP3 definiert?
[1] Martin Aigner and Gunter M. Ziegler. Das BUCH der Beweise. Springer-Verlag, Heidelberg Berlin,third edition, 2009.
[2] Gerd Fischer. Analytische Geometrie. Vieweg, Wiesbaden, 2001. 7. Auflage.
[3] Gerd Fischer. Lernbuch Lineare Algebra und Analytische Geometrie. Vieweg+Teubner, Wiesbaden,2011.
[4] Jurgen Richter-Gebert. Mechanical theorem proving in projective geometry. Annals of Mathema-tics and Artificial Intelligence, 13:139–172, 1995. vs24.kobv.de/opus4-zib/files/101/SC-93-05.pdf.
54
6 Was ist (eine) Geometrie?
6.1 Axiomatische Beschreibungen von Geometrie
Nach Euklid ca. 300 vor Christus [2, 3] und Hilbert 1899 [5]; siehe auch Artmann [1], Hart-shorne [4]).So beschreibt Hilbert in den “Grundlagen der Geometrie” ein System von Axiomen fur eineMenge von Elementen, die “Punkte” heißen, mit Teilmengen, die “Geraden” heißen, so dassein Satz von Axiomen erfullt ist:• 8 Axiome der Verknupfung (Inzidenz)• 4 Axiome der Anordnung• 5 Axiome der Kongruenz• ein Parallelenaxiom• 2 Axiome der Stetigkeit.
Das Hilbert’sche Axiomensystem findet man beispielsweise zusammengefasst unterde.wikipedia.org/wiki/Hilberts_Axiomensystem_der_euklidischen_Geometrie.Muhsame Arbeit ergibt dann, dass die Axiome unabhangig voneinander sind, widerspruchsfreisind (unter der Annahme, dass die elementare Arithmetik widerspruchsfrei ist), und vollstandig:dass damit die Geometrie in R2 und R3 eindeutig beschrieben ist.Problem: es gibt auch viele sehr unsymmetrische, unnaturliche etc. Systeme, die sinnvolle Axio-mensysteme fur Geometrie erfullen konnen. Die Axiome sehen teilweise sehr willkurlich aus.Es stellt sich heraus, dass projektive Geometrie einfacher und konziser beschrieben werden kann(nach Veblen & Young 1905).
Definition 6.1. Eine projektive Geometrie ist ein Paar P = (P ,L), wobei die Elemente von PPunkte und die Elemente von L Geraden heißen, mit L ⊆ 2P (die Geraden sind Mengen vonPunkten), mitAxiom 1 Durch zwei verschiedene Punkte gibt es genau eine Gerade.Axiom 2 Sind A,B,C ∈ P verschiedene Punkte und schneidet ` ∈ L die Geraden AB und
BC in unterschiedlichen Punkten, dann schneidet sie auch AC. (“Axiom von Pasch”)Axiom 3 Jede Gerade enthalt mindestens 3 Punkte; es gibt mindestens zwei verschiedene Ge-
raden.
Theorem 6.2 (Veblen & Young). Gilt in einer projektiven Geometrie der Satz von Desargues,so ist sie als projektiver Raum uber einem Schiefkorper darstellbar.Gilt in einer projektiven Geometrie der Satz von Pappus, so ist sie sogar als projektiver Raumuber einem Korper darstellbar.
(Nach Hessenberg 1905 impliziert der Satz von Pappus den Satz von Desargues.)Fugt man Axiome der Ordnung und Stetigkeit hinzu, dann kann man weiter auch den RPn
charakterisieren.
6.2 Kleins Erlanger Programm
In seiner Antrittsvorlesung in Erlangen (1872) hat Felix Klein eine andere Sichtweise auf Geo-metrie propagiert: als eine Menge von Elementen, die “Punkte” heißen, mit einer transitiven
55

Gruppenaktion, die zeigt, wie der Raum von jedem Punkt aus gleich aussieht. Eigenschaftender Geometrie sind dann Invarianten der Gruppenaktion, wie z.B. Geraden, Unterraume, etc.Wir versuchen die Idee von Klein formal zu fassen.
Definition 6.3. Eine Geometrie ist eine Menge X von Elementen, die Punkte heißen, mit Wir-kung einer Gruppe G, die transitiv und treu auf X wirkt.
(Transformationsgruppe: jedem Element g ∈ G entspricht eine Bijektion ϕg : X → X , so dassϕe die Identitat ist, und ϕg ◦ ϕh(x) = ϕg(ϕh(x)) gilt: Die Wirkung ist transitiv, wenn es furbeliebige x, y ∈ X ein g ∈ G gibt mit ϕ(x) = y. Die Wirkung ist treu, wenn nur das neutraleElement e ∈ G als Identitat wirkt.)Aufgabe der Geometrie (als Wissenschaft) ist dann das Studium der Eigenschaften/Strukturen,die unter der Transformationsgruppe invariant sind (also erhalten bleiben).Beispiele n-dimensionaler Geometrien (Tabelle im Folgenden noch zu vervollstandigen):
Geometrie X Gruppe G dimG Invarianteneuklidisch Rn Rn o O(n)
(n+12
)Kollinearitat (⇒ Unterraume); Abstande(⇒Winkel, Volumina)
Ahnlichkeit Rn Rn o (O(n)×R>0)(n+12
)+ 1 Kollinearitat; Abstandsverhaltnisse (⇒
Winkel, Volumenverhaltnisse)affin Rn Rn o GL(n,R) n(n + 1) Kollinearitat; Abstands-/
Teilungsverhaltnisse auf Geradenprojektiv RPn GL(n + 1,R)/R∗ n(n + 2) Kollinearitat; Doppelverhaltnisse; Quadri-
kenspharisch Sn
elliptischhyperbolischMobius
Hier ist mit R∗ die multiplikative Gruppe R\{0} gemeint. Ublich sind die BezeichnungenPO(n + 1) = O(n + 1)/(±I) und PGL(n + 1,R) = GL(n + 1,R)/R∗ fur die Transfor-mationsgruppen von elliptischer bzw. projektiver Geometrie.Viele dieser Geometrien sind Teilgeometrien/Erweiterungen von anderen – wobei wir einigeerst noch kennenlernen werden:
Definition 6.4. Eine Teilgeometrie einer Geometrie (X,G) ist gegeben durch eine TeilmengeX ′ ⊆ X und eine Untergruppe G′ ⊆ G, die X ′ erhalt (also ϕg′(x′) ∈ X ′ fur x′ ∈ X ′ undg′ ∈ G′), so dass sich jede Transformation g′ ∈ G′ eindeutig auf X fortsetzt, es also keineunterschiedlichen Gruppenelemente in G gibt, die auf X ′ dieselbe Wirkung zeigen.In diesem Fall heißt (X,G) auch eine Erweiterung der Geometrie (X ′, G′)
projektiv↙ ↓ ↘
elliptisch affin hyperbolisch↓
Ahnlichkeit↓
euklidisch
56
[1] Benno Artmann. Euclid — The Creation of Mathematics. Springer-Verlag, New York, 1999.
[2] Oliver Byrne. The First Six Books of the Elements of Euclides. web presentation by Bill Casselman;http://www.math.ubc.ca/˜cass/Euclid/byrne.html.
[3] Euclid. The Elements. web presentation by David E. Joyce;http://aleph0.clarku.edu/˜djoyce/java/elements/toc.html.
[4] Robin Hartshorne. Geometry: Euclid and Beyond. Undergraduate Texts in Math. Springer-Verlag,New York, 2000.
[5] David Hilbert. Grundlagen der Geometrie. Chelsea Publishing Company, Leipzig, 1899. mit zahl-reichen Neuauflagen, zuletzt bei Teubner, Stuttgart 1999.
57
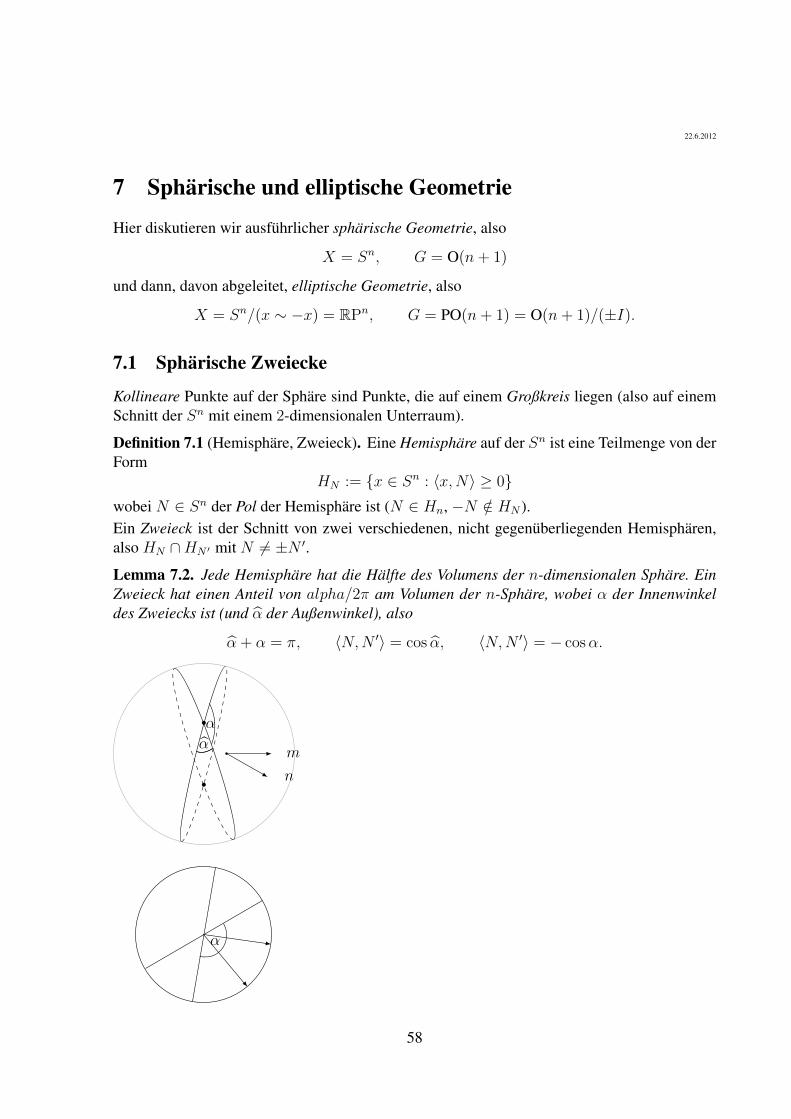
22.6.2012
7 Spharische und elliptische Geometrie
Hier diskutieren wir ausfuhrlicher spharische Geometrie, also
X = Sn, G = O(n+ 1)
und dann, davon abgeleitet, elliptische Geometrie, also
X = Sn/(x ∼ −x) = RPn, G = PO(n+ 1) = O(n+ 1)/(±I).
7.1 Spharische Zweiecke
Kollineare Punkte auf der Sphare sind Punkte, die auf einem Großkreis liegen (also auf einemSchnitt der Sn mit einem 2-dimensionalen Unterraum).
Definition 7.1 (Hemisphare, Zweieck). Eine Hemisphare auf der Sn ist eine Teilmenge von derForm
HN := {x ∈ Sn : 〈x,N〉 ≥ 0}wobei N ∈ Sn der Pol der Hemisphare ist (N ∈ Hn, −N /∈ HN ).Ein Zweieck ist der Schnitt von zwei verschiedenen, nicht gegenuberliegenden Hemispharen,also HN ∩HN ′ mit N 6= ±N ′.
Lemma 7.2. Jede Hemisphare hat die Halfte des Volumens der n-dimensionalen Sphare. EinZweieck hat einen Anteil von alpha/2π am Volumen der n-Sphare, wobei α der Innenwinkeldes Zweiecks ist (und α der Außenwinkel), also
α + α = π, 〈N,N ′〉 = cos α, 〈N,N ′〉 = − cosα.
α
α
m
n
α
58
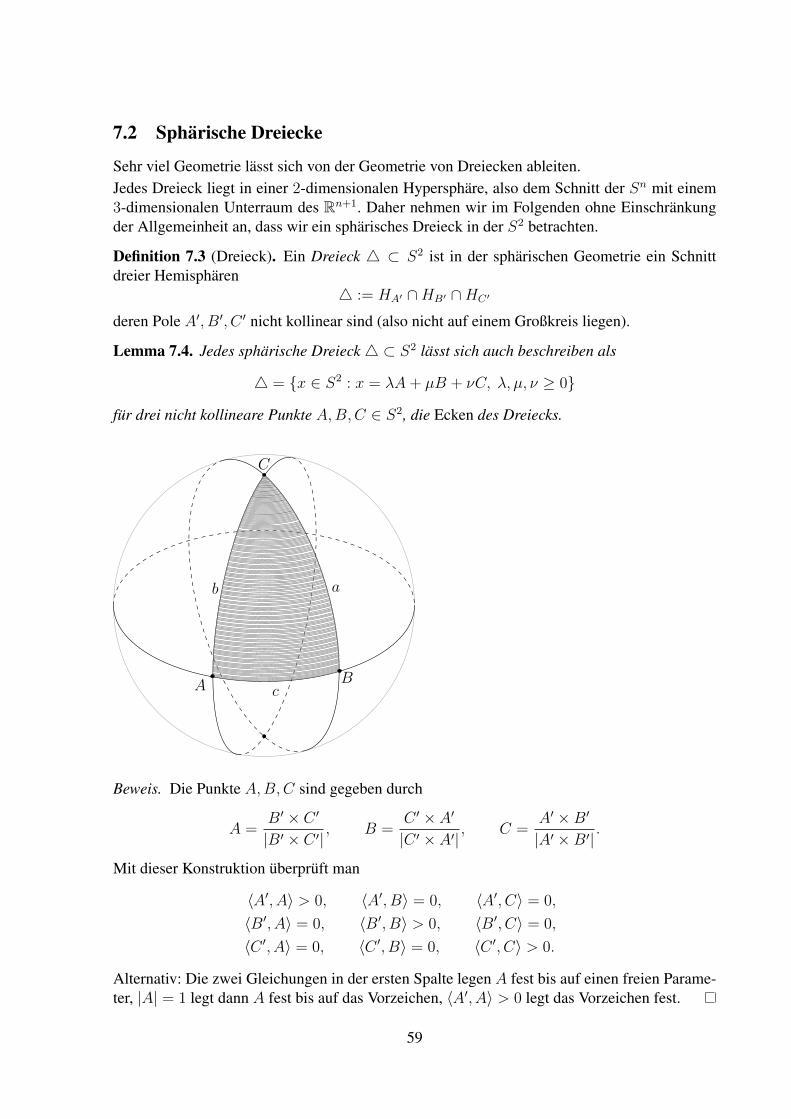
7.2 Spharische Dreiecke
Sehr viel Geometrie lasst sich von der Geometrie von Dreiecken ableiten.Jedes Dreieck liegt in einer 2-dimensionalen Hypersphare, also dem Schnitt der Sn mit einem3-dimensionalen Unterraum des Rn+1. Daher nehmen wir im Folgenden ohne Einschrankungder Allgemeinheit an, dass wir ein spharisches Dreieck in der S2 betrachten.
Definition 7.3 (Dreieck). Ein Dreieck 4 ⊂ S2 ist in der spharischen Geometrie ein Schnittdreier Hemispharen
4 := HA′ ∩HB′ ∩HC′
deren Pole A′, B′, C ′ nicht kollinear sind (also nicht auf einem Großkreis liegen).
Lemma 7.4. Jedes spharische Dreieck4 ⊂ S2 lasst sich auch beschreiben als
4 = {x ∈ S2 : x = λA+ µB + νC, λ, µ, ν ≥ 0}
fur drei nicht kollineare Punkte A,B,C ∈ S2, die Ecken des Dreiecks.
A B
C
c
ab
Beweis. Die Punkte A,B,C sind gegeben durch
A =B′ × C ′
|B′ × C ′|, B =
C ′ × A′
|C ′ × A′|, C =
A′ ×B′
|A′ ×B′|.
Mit dieser Konstruktion uberpruft man
〈A′, A〉 > 0, 〈A′, B〉 = 0, 〈A′, C〉 = 0,
〈B′, A〉 = 0, 〈B′, B〉 > 0, 〈B′, C〉 = 0,
〈C ′, A〉 = 0, 〈C ′, B〉 = 0, 〈C ′, C〉 > 0.
Alternativ: Die zwei Gleichungen in der ersten Spalte legen A fest bis auf einen freien Parame-ter, |A| = 1 legt dann A fest bis auf das Vorzeichen, 〈A′, A〉 > 0 legt das Vorzeichen fest.
59

Lemma 7.5. Im Dreieck 4 = ABC sind die Kantenlangen (in der intrinsischen Metrik derSphare, vom Radius 1) gegeben durch
cos a = 〈B,C〉, cos b = 〈C,A〉, cos c = 〈A,B〉
und die außeren Winkel durch
cos α = 〈B′, C ′〉, cos β = 〈C ′, A′〉, cos γ = 〈A′, B′〉,
mit Innenwinkeln α = π − α usw.
Proposition 7.6. Zu jedem Dreieck4 = ABC gibt es das duale Dreieck4′ = A′B′C ′ so dass• das Duale des Dualen ist das Ausgangsdreieck:4′′ = 4,• die Kantenlangen des Dreiecks sind die Außenwinkel des Dualen, und umgekehrt: a′ = α,
usw.
Lemma 7.7 (Dreiecksungleichungen). Die Kantenlangen, Außenwinkel und Innenwinkel desspharischen Dreiecks4 = ABC erfullen
a+ b− c > 0 a− b+ c > 0 − a+ b+ c > 0 a+ b+ c < 2π
α + β − γ > 0 α− β + γ > 0 − α + β + γ > 0 α + β + γ < 2π
α + β − γ < π α− β + γ < π − α + β + γ < π α + β + γ > π.
Beweis. Die ersten drei Ungleichungen fur die Seitenlangen folgen aus der Dreiecksunglei-chung fur die Metrik auf der Sphare. Die vierte folgt aus
a+b+c = d(B,C)+d(C,A)+d(A,B) < d(B,C)+d(C,−B)+d(−B,A)+d(A,B) = π+π.
Die Ungleichungen fur die Außenwinkel folgen daraus sofort nach Proposition 7.6, und damitauch die Ungleichungen fur die Innenwinkel mit α = π − α usw.
Insbesondere wissen wir aus Lemma 7.7, dass in jedem spharischen Dreieck die Winkelsummeα + β + γ großer ist als π.
Theorem 7.8. Die Flache des Dreiecks4 = ABC mit Innenwinkeln α, β, γ ist α+ β + γ− π.
Beweis. Die Zweiecke, die von den Innenwinkeln von4 und von denen des gegenuberliegendenDreiecks −4 aufgespannt werden, uberdecken die Sphare S2 ganz, dabei die Dreiecke 4 und−4 dreifach, den Rest aber einfach. Also erhalten wir
(2α + 2β + 2γ) + (2α + 2β + 2γ) = 4π + 2Vol(4) + 2Vol(4),
also4α + 4β + 4γ = 4π + 4Vol(4).
Aufgabe 28. Sei V ein spharisches Viereck, dessen vier Kanten alle gleich lang sind, und des-sen Innenwinkel alle 2π/3 (also 120◦) betragen. Berechnen Sie die Flache von V auf zweiverschiedene Weisen, sowie den Umfang von V .
60

Aufgabe 29. Gegeben sei ein rechtwinkliges Dreieck mit Kathetenlangen 3π/8 und π/2. Be-rechnen Sie Umfang und Flache des Dreiecks, falls es (i) ein spharisches Dreieck (ii) ein eukli-disches Dreieck (also in der Ebene R2) ist. Welches Dreieck ist großer?
∆−∆
C
A−C
−A
28. Juni 2012
Proposition 7.9. Seien a, b, c ∈ R.(i) Ein spharisches Dreieck mit den Kantenlangen a, b, c existiert dann und nur dann, wenn
die vier Dreiecksungleichungen
a+ b− c > 0 a− b+ c > 0 − a+ b+ c > 0 a+ b+ c < 2π
erfullt sind.(ii) Wenn das Dreieck existiert, dann ist es eindeutig bis auf Kongruenztransformationen.
Beweis. Wir durfen A,B im Abstand c auf dem Aquator platzieren, und betrachten die Kreis-scheiben KA und KB vom Radius b bzw. a um A bzw. B.Wir brauchen, dass die Kreisscheiben uberlappen und sich die Randkreise in zwei Schnittpunk-ten (in der oberen und in der unteren Hemisphare) schneiden. Das wird durch die vier Unglei-chungen garantiert: Wenn a + b ≤ c ist, dann sind die beiden Kreisscheiben disjunkt. Wenna+ c ≤ b, dann ist KB ⊂ KA; wenn b+ c ≤ a, dann ist KA ⊂ KB. Wenn a+ b+ c ≥ 2π, dannist KA ∪ KB = S2, die Kreischeiben uberdecken die Sphare, aber die Randkreise schneidensich nicht.
61
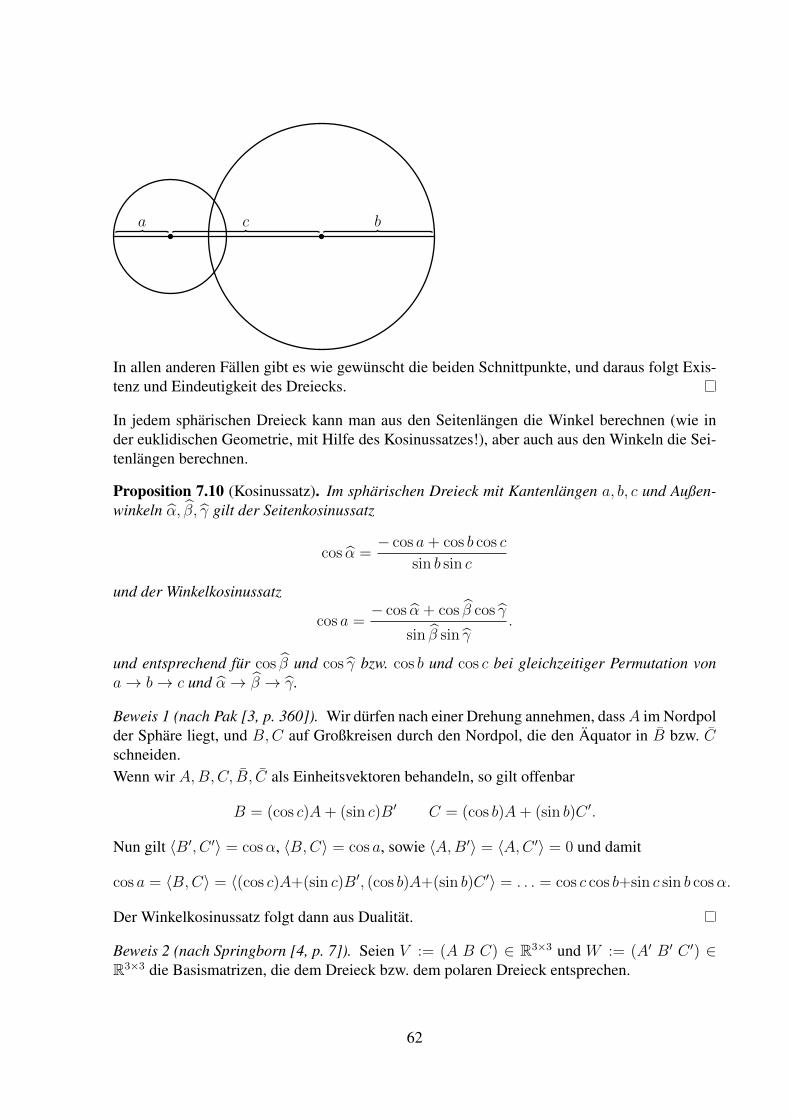
a c b
In allen anderen Fallen gibt es wie gewunscht die beiden Schnittpunkte, und daraus folgt Exis-tenz und Eindeutigkeit des Dreiecks.
In jedem spharischen Dreieck kann man aus den Seitenlangen die Winkel berechnen (wie inder euklidischen Geometrie, mit Hilfe des Kosinussatzes!), aber auch aus den Winkeln die Sei-tenlangen berechnen.
Proposition 7.10 (Kosinussatz). Im spharischen Dreieck mit Kantenlangen a, b, c und Außen-winkeln α, β, γ gilt der Seitenkosinussatz
cos α =− cos a+ cos b cos c
sin b sin c
und der Winkelkosinussatz
cos a =− cos α + cos β cos γ
sin β sin γ.
und entsprechend fur cos β und cos γ bzw. cos b und cos c bei gleichzeitiger Permutation vona→ b→ c und α→ β → γ.
Beweis 1 (nach Pak [3, p. 360]). Wir durfen nach einer Drehung annehmen, dassA im Nordpolder Sphare liegt, und B,C auf Großkreisen durch den Nordpol, die den Aquator in B bzw. Cschneiden.Wenn wir A,B,C, B, C als Einheitsvektoren behandeln, so gilt offenbar
B = (cos c)A+ (sin c)B′ C = (cos b)A+ (sin b)C ′.
Nun gilt 〈B′, C ′〉 = cosα, 〈B,C〉 = cos a, sowie 〈A,B′〉 = 〈A,C ′〉 = 0 und damit
cos a = 〈B,C〉 = 〈(cos c)A+(sin c)B′, (cos b)A+(sin b)C ′〉 = . . . = cos c cos b+sin c sin b cosα.
Der Winkelkosinussatz folgt dann aus Dualitat.
Beweis 2 (nach Springborn [4, p. 7]). Seien V := (A B C) ∈ R3×3 und W := (A′ B′ C ′) ∈R3×3 die Basismatrizen, die dem Dreieck bzw. dem polaren Dreieck entsprechen.
62

Die Gram-Matrix zu V ist dann die symmetrische, positiv-definite Matrix
G := V tV =
〈A,A〉 〈A,B〉 〈A,C〉〈B,A〉 〈B,B〉 〈B,C〉〈C,A〉 〈C,B〉 〈C,C〉
=
1 cos c cos bcos c 1 cos acos b cos a 1
.
Genauso gehort zu W die Gram-Matrix
G′ := W tW =
〈A′, A′〉 〈A′, B′〉 〈A′, C ′〉〈B′, A′〉 〈B′, B′〉 〈B′, C ′〉〈C ′, A′〉 〈C ′, B′〉 〈C ′, C ′〉
=
1 cos γ cos βcos γ 1 cos α
cos β cos α 1
.
Und schließlich berechnen wir das Produkt
W tV =
〈A′, A〉 〈A′, B〉 〈A′, C〉〈B′, A〉 〈B′, B〉 〈B′, C〉〈C ′, A〉 〈C ′, B〉 〈C ′, C〉
=
〈A′, A〉 00 〈B′, B〉 00 0 〈C ′, C〉
=: D,
eine Diagonalmatrix mit positiven Diagonaleintragen, also invertierbar.Damit konnen wir G′ einerseits aus W berechnen, also aus cos α, cos β und cos γ, andererseitsaus V mit W t = DV −1 und W = (V t)−1D, und damit G′ = W tW = DV −1(V t)−1D =DG−1D, und damit aus a, b und c.Gleichsetzen der beiden Ausdrucke fur G′ und Vergleich der Matrixeintrage liefert zuerst For-meln fur die Diagonaleintrage von D, und dann die Seitenkosinussatze.Die Winkelkosinussatze erhalt man entweder analog, oder viel einfacher aus der Dualitat vonProposition 7.6.
Wir geben zwei weitere, wichtige Formeln/Resultat der spharischen Geometrie ohne Beweisan.
Proposition 7.11 (Sinussatz). Im spharischen Dreieck mit Kantenlangen a, b, c und Außenwin-keln α, β, γ gilt
sin a
sin α=
sin b
sin β=
sin c
sin γ.
(Dies gilt naturlich genauso fur die Innenwinkel α, β, γ, wegen α = π − α und damit sin α =sinα, usw.)
Proposition 7.12 (Napier’sche Regel). Im rechtwinkligen spharischen Dreieck mit Seitenlangena, b, c, Innenwinkeln α, β sowie γ = π/2, und “Seitenkomplementen” a := π/2−a, b := π/2−agilt
cos c = sin a sin b = cotα cot b,
sowie die vier weiteren Gleichungen, die man durch die zyklische Vertauschung
c→ α→ b→ a→ β → c
daraus gewinnen kann.
63
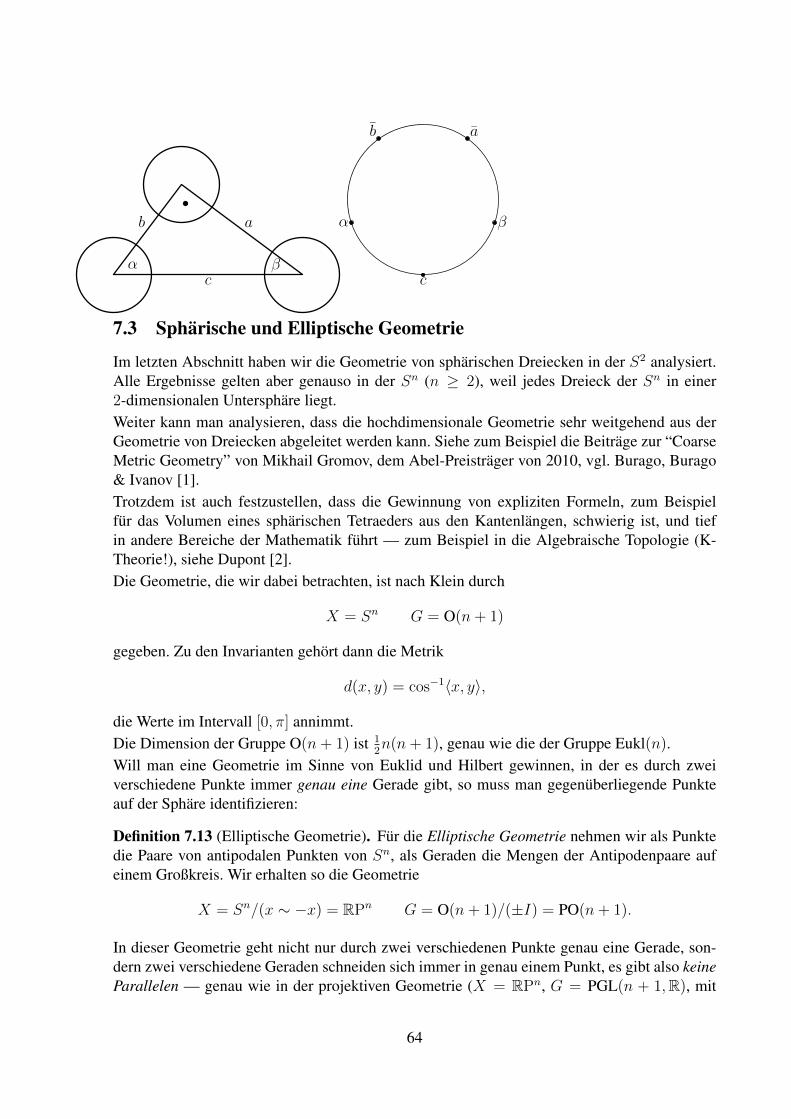
α β
b a
c c
α β
b a
7.3 Spharische und Elliptische Geometrie
Im letzten Abschnitt haben wir die Geometrie von spharischen Dreiecken in der S2 analysiert.Alle Ergebnisse gelten aber genauso in der Sn (n ≥ 2), weil jedes Dreieck der Sn in einer2-dimensionalen Untersphare liegt.Weiter kann man analysieren, dass die hochdimensionale Geometrie sehr weitgehend aus derGeometrie von Dreiecken abgeleitet werden kann. Siehe zum Beispiel die Beitrage zur “CoarseMetric Geometry” von Mikhail Gromov, dem Abel-Preistrager von 2010, vgl. Burago, Burago& Ivanov [1].Trotzdem ist auch festzustellen, dass die Gewinnung von expliziten Formeln, zum Beispielfur das Volumen eines spharischen Tetraeders aus den Kantenlangen, schwierig ist, und tiefin andere Bereiche der Mathematik fuhrt — zum Beispiel in die Algebraische Topologie (K-Theorie!), siehe Dupont [2].Die Geometrie, die wir dabei betrachten, ist nach Klein durch
X = Sn G = O(n+ 1)
gegeben. Zu den Invarianten gehort dann die Metrik
d(x, y) = cos−1〈x, y〉,
die Werte im Intervall [0, π] annimmt.Die Dimension der Gruppe O(n+ 1) ist 1
2n(n+ 1), genau wie die der Gruppe Eukl(n).
Will man eine Geometrie im Sinne von Euklid und Hilbert gewinnen, in der es durch zweiverschiedene Punkte immer genau eine Gerade gibt, so muss man gegenuberliegende Punkteauf der Sphare identifizieren:
Definition 7.13 (Elliptische Geometrie). Fur die Elliptische Geometrie nehmen wir als Punktedie Paare von antipodalen Punkten von Sn, als Geraden die Mengen der Antipodenpaare aufeinem Großkreis. Wir erhalten so die Geometrie
X = Sn/(x ∼ −x) = RPn G = O(n+ 1)/(±I) = PO(n+ 1).
In dieser Geometrie geht nicht nur durch zwei verschiedenen Punkte genau eine Gerade, son-dern zwei verschiedene Geraden schneiden sich immer in genau einem Punkt, es gibt also keineParallelen — genau wie in der projektiven Geometrie (X = RPn, G = PGL(n + 1,R), mit
64

n2 − 1 = n(n + 2) Freiheitsgraden), wobei die elliptische Geometrie aber eine viel kleinereGruppe hat, und dafur mehr Invarianten, unter anderem die Metrik
d(x, y) = min{cos−1〈x, y〉, cos−1〈x,−y〉} = cos−1 |〈x, y〉|,
die Werte im Intervall [0, π/2] annimmt.Die Dimension der Gruppe PO(n+ 1) ist 1
2n(n+ 1), genau wie die der Gruppe O(n+ 1).
Dreiecke, Winkel, Volumina etc. verhalten sich dabei sehr ahnlich wie in der spharischen Geo-metrie, wobei die Geometrie nur fur ungerades n orientierbar ist.
Aufgabe 30. Berechnen Sie die Kantenlangen, Winkel, Flache und Umfang des Dreiecks mitden Ecken Berlin (Geographische Lage: 52◦ 31′ N, 13◦ 24′ O), Brussel (50◦ 51′ N, 4◦ 21′ O)und Athen (37◦ 59′ N, 23◦ 44′ O) auf der Erdkugel, auf der der Abstand von den Polen zumAquator bekanntlich 10.000 km betragt.
[1] Dmitri Burago, Yuri Burago, and Sergei Ivanov. A Course in Metric Geometry, volume 33 of Gra-duate Studies in Math. Amer. Math. Soc., 2001.
[2] Johan L. Dupont. Scissors congruences, group homology and characteristic classes, volume 1 ofNankai Tracts in Mathematics. World Scientific, Singapore, 2001.
[3] Igor Pak. Lectures on discrete and polyhedral geometry. book manuscript at http://www.math.ucla.edu/˜pak/geompol8.pdf, version of April 20, 2010.
[4] Boris A. Springborn. Geometry I. Lecture Notes, TU Berlin/Berlin Mathematical School,2007/08, 59 pp., ftp://ftp.math.tu-berlin.de/pub/Lehre/GeometryI/WS07/geometry1_ws07.pdf.
65
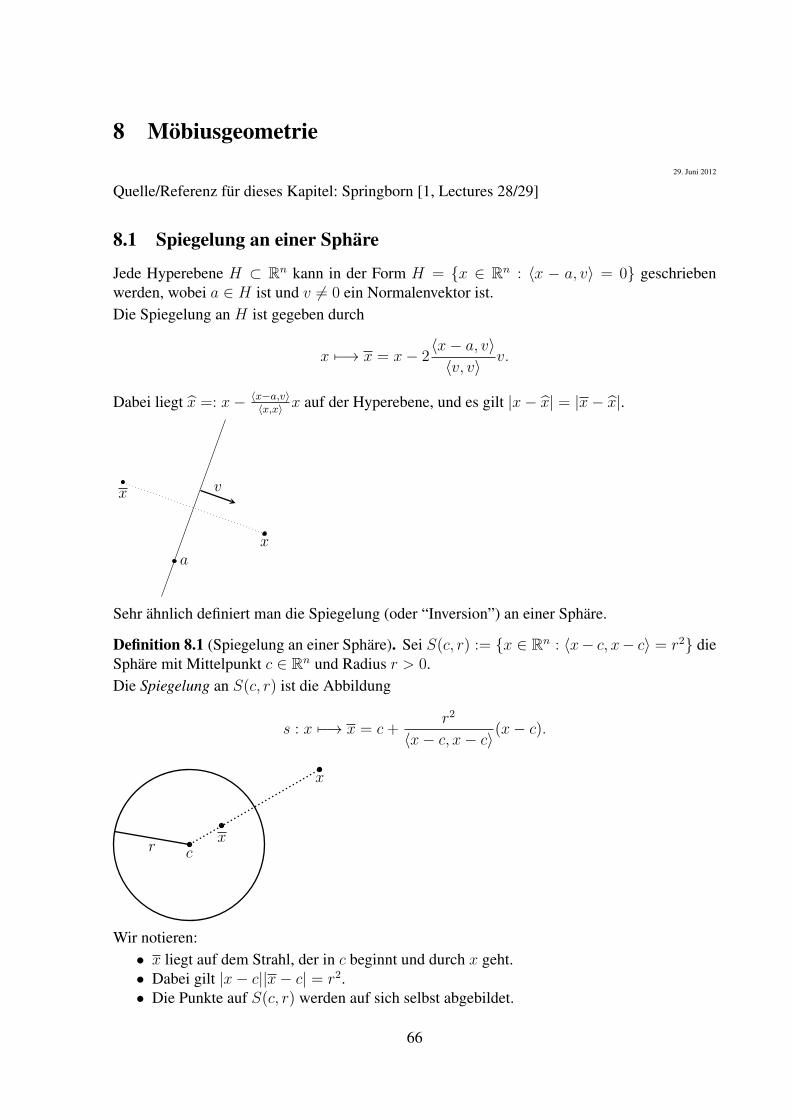
8 Mobiusgeometrie29. Juni 2012
Quelle/Referenz fur dieses Kapitel: Springborn [1, Lectures 28/29]
8.1 Spiegelung an einer Sphare
Jede Hyperebene H ⊂ Rn kann in der Form H = {x ∈ Rn : 〈x − a, v〉 = 0} geschriebenwerden, wobei a ∈ H ist und v 6= 0 ein Normalenvektor ist.Die Spiegelung an H ist gegeben durch
x 7−→ x = x− 2〈x− a, v〉〈v, v〉
v.
Dabei liegt x =: x− 〈x−a,v〉〈x,x〉 x auf der Hyperebene, und es gilt |x− x| = |x− x|.
x
x v
a
Sehr ahnlich definiert man die Spiegelung (oder “Inversion”) an einer Sphare.
Definition 8.1 (Spiegelung an einer Sphare). Sei S(c, r) := {x ∈ Rn : 〈x− c, x− c〉 = r2} dieSphare mit Mittelpunkt c ∈ Rn und Radius r > 0.Die Spiegelung an S(c, r) ist die Abbildung
s : x 7−→ x = c+r2
〈x− c, x− c〉(x− c).
c
x
xr
Wir notieren:• x liegt auf dem Strahl, der in c beginnt und durch x geht.• Dabei gilt |x− c||x− c| = r2.• Die Punkte auf S(c, r) werden auf sich selbst abgebildet.
66

• Die Abbildung ist eine Involution: x 7→ x 7→ x = x.• Die Abbildung ist fur x = c nicht definiert. Wir fugen einen Punkt im Unendlichen “∞”
hinzu, und definieren dann die Abbildung als c 7→ ∞ and∞ 7→ c.• Mit dieser Festsetzung ist die Spiegelung an der Sphare S(c, r) eine Bijektion Rn ∪{∞} → Rn ∪ {∞}.
8.2 Mobiusgeometrie
Definition 8.2 (Mobiustransformationen, Mobiusgeometrie). Eine Mobiustransformation ist ei-ne Abbildung f : Rn ∪ {∞} → Rn ∪ {∞}, die sich als Hintereinanderausfuhrung von endlichvielen Spiegelungen in Hyperebenen und/oder Spharen darstellen lasst.Ist eine Mobiustransformatione ein Hintereinanderausfuhrung einer geraden Anzahl von Spie-gelungen, so ist sie orientierungserhaltend, andernfalls ist sie orientierungsumkehrend.Die Gruppe der Mobiustransformationen bezeichnen wir mit Mob(n), die Untergruppe der ori-entierungserhaltenden Mobiustransformationen mit Mob+(n).
X = Rn ∪ {∞}, G := Mob(n).
In dieser Definition sind naturlich einige Behauptungen versteckt, etwa dass Mob(n) wirklicheine Gruppe ist und Mob+(n) eine Untergruppe, und dass Orientierung wohldefiniert ist.
Lemma 8.3. Ahnlichkeitsabbildungen sind Mobiustransformationen:
Ahnl(n,R) = Rn o (O(n)× R>0) ⊆ Mob(n).
Beweis. Jede orthogonale Abbildung in O(n) ist eine Hintereinanderausfuhrung von hochstensn Spiegelungen an Hyperebenen.Translationen kann man durch Spiegelung an zwei parallelen Hyperebenen erzeugen.Die Streckung x 7→ λx erhalt man durch Spiegelung an Sn−1 = S(0, 1), gefolgt von Spiegelungan S(0,
√λ).
Hinweis: Mit “Spharen” bezeichnet man in der Mobiusgeometrie oft nicht nur die (n − 1)-dimensionale Spharen S(c, r) ⊂ Rn, sondern auch die Hyperebenen (interpretiert als “Spharendurch∞”).
Theorem 8.4. Mobiustransformationen bilden Hyperebenen und Spharen auf Hyperebenen undSpharen ab.
Beweis. (1) Es reicht, das fur die Spiegelung in der Einheitssphare Sn−1 ⊂ Rn−1 zu zeigen,weil jede Sphareninversion in einer beliebigen Sphare S dargestellt werden kann als– Ahnlichkeitstransformation, die S auf S(0, 1) abbildet,– gefolgt von Inversion in S(0, 1)– gefolgt von Umkehrung der Ahnlichkeitstransformation.(2) Wir zeigen, dass
{x ∈ Rn : p|x|2 − 2〈x, v〉+ q = 0} fur |v|2 − pq > 0
67
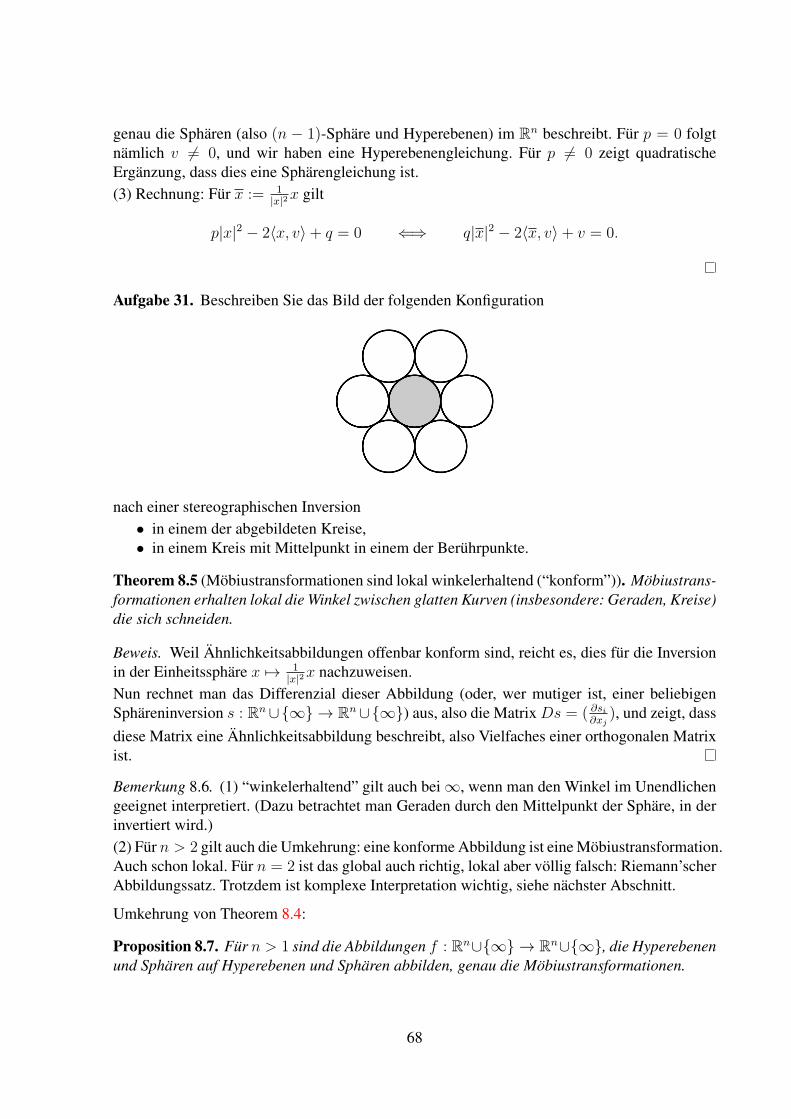
genau die Spharen (also (n − 1)-Sphare und Hyperebenen) im Rn beschreibt. Fur p = 0 folgtnamlich v 6= 0, und wir haben eine Hyperebenengleichung. Fur p 6= 0 zeigt quadratischeErganzung, dass dies eine Spharengleichung ist.(3) Rechnung: Fur x := 1
|x|2x gilt
p|x|2 − 2〈x, v〉+ q = 0 ⇐⇒ q|x|2 − 2〈x, v〉+ v = 0.
Aufgabe 31. Beschreiben Sie das Bild der folgenden Konfiguration
nach einer stereographischen Inversion• in einem der abgebildeten Kreise,• in einem Kreis mit Mittelpunkt in einem der Beruhrpunkte.
Theorem 8.5 (Mobiustransformationen sind lokal winkelerhaltend (“konform”)). Mobiustrans-formationen erhalten lokal die Winkel zwischen glatten Kurven (insbesondere: Geraden, Kreise)die sich schneiden.
Beweis. Weil Ahnlichkeitsabbildungen offenbar konform sind, reicht es, dies fur die Inversionin der Einheitssphare x 7→ 1
|x|2x nachzuweisen.Nun rechnet man das Differenzial dieser Abbildung (oder, wer mutiger ist, einer beliebigenSphareninversion s : Rn∪{∞} → Rn∪{∞}) aus, also die Matrix Ds = ( ∂si
∂xj), und zeigt, dass
diese Matrix eine Ahnlichkeitsabbildung beschreibt, also Vielfaches einer orthogonalen Matrixist.
Bemerkung 8.6. (1) “winkelerhaltend” gilt auch bei∞, wenn man den Winkel im Unendlichengeeignet interpretiert. (Dazu betrachtet man Geraden durch den Mittelpunkt der Sphare, in derinvertiert wird.)(2) Fur n > 2 gilt auch die Umkehrung: eine konforme Abbildung ist eine Mobiustransformation.Auch schon lokal. Fur n = 2 ist das global auch richtig, lokal aber vollig falsch: Riemann’scherAbbildungssatz. Trotzdem ist komplexe Interpretation wichtig, siehe nachster Abschnitt.
Umkehrung von Theorem 8.4:
Proposition 8.7. Fur n > 1 sind die Abbildungen f : Rn∪{∞} → Rn∪{∞}, die Hyperebenenund Spharen auf Hyperebenen und Spharen abbilden, genau die Mobiustransformationen.
68
Beweis. Eine solche Abbildung bildet insbesondere auch Kreise und Geraden (die 1-dimensio-nalen Schnitte von Hyperebenen und Spharen) auf Kreise und Geraden ab.(1) Im Fall f(∞) = ∞ werden alle Geraden auf Geraden abgebildet. Also haben wir es nachTheorem 3.5 mit einer affinen Abbildung zu tun. Weiter durfen wir (nach einer Translation)annehmen, dass die Abbildung 0 auf 0 abbildet. Also ist die Abbildung linear.Wenn nun weiter die Einheitssphare auf die Einheitssphare abgebildet wird, dann ist die Abbil-dung eine Ahnlichkeitstransformation (namlich ein Vielfaches einer orthogonalen Abbildung).(2) Gilt f(∞) = c, so sei g die Inversion in der Sphare S(c, 1). Weil die Sphareninversion gHyperebenen und Spharen auf Hyperebenen und Spharen abbildet, gilt dies auch fur die Ab-bildung g ◦ f . Die Abbildung g ◦ f bildet nach ∞ nach ∞ ab, ist also nach Fall (1) eineMobiustransformation. Weil g = g−1 als Sphareninversion aber auch eine Mobiustransformationist, gilt dies auch fur f .
Bemerkung: fur n = 1 ist das naturlich falsch.Erweiterung von Lemma 8.3:
Korollar 8.8. Ahnlichkeitstransformationen sind genau die Mobiustransformationen, die ∞fixieren.
Korollar 8.9. Fur die n-dimensionale Mobiusgeometrie ist die Anzahl der Freiheitsgrade, alsodie Dimension der Gruppe Mob(n), gleich 1
2(n+ 2)(n+ 1) =
(n+22
).
Beweis. n Freiheitsgrade fur den Punkt, der durch Inversion g in einer Sphare vom Radius 1nach Unendlich abgebildet wird. g◦f ist dann eine Ahnlichkeitstransformation, und fur die gibtes (wie schon diskutiert) n+ 1 +
(n2
)Freiheitsgrade, mit
(n2
)= dim O(n).
Aufgabe 32. Beschreiben Sie die Mobiustransformationen, die die folgenden Folgen von Punk-ten aufeinander abbilden:
(i) (0, 0), (1, 0), (0, 1) → (0, 0), (1, 0), (2, 0),(ii) (0, 0), (1, 0), (0, 1) → (0, 0), (1, 0), (−1, 0).
8.3 Komplex-projektive Interpretation der 2-dimensionalen Mobiusgeo-metrie
Im Fall n = 2 konnen wir den R2 mit der komplexen Zahlenebene identifizieren, R2 ∪ {∞}also mit C ∪ {∞}.Die Mobiustransformationen in der Ebene konnen wir alle als gebrochen-lineare komplexe oderkonjugiert-komplexe Funktionen darstellen:
• orientierungserhaltende Ahnlichkeitstransformationen sind z 7→ az + b fur a, b ∈ C,|a| = 1,orientierungsumkehrende Ahnlichkeitstransformationen sind z 7→ az + b fur a, b ∈ C,|a| = 1,
• Spiegelung an der x-Achse ist z 7→ z,
• Spiegelung im Einheitskreis ist z 7→ 1|z|2 z0 = 1
z.
69

Proposition 8.10. Die orientierungserhaltenden Mobiustransformationen auf C = C ∪ {∞}sind genau die Transformationen
z 7→ az + b
cz + dfur a, b, c, d ∈ C mit det
(a bc d
)6= 0,
die orientierungsumkehrenden Mobiustransformationen auf C = sind genau die Transforma-tionen
z 7→ az + b
cz + dfur a, b, c, d ∈ C mit det
(a bc d
)6= 0.
Beweis.(1) Die angegebenen gebrochen-linearen Transformationen bilden eine Gruppe: Die orientie-rungserhaltenden sind dabei genau die projektiven Transformationen von CP1.(2) Als Spezialfalle identifizieren wir alle oben angegebenen Erzeuger fur die Mobiustrans-formationen in der Ebene; also ist die Gruppe Mob(2) in der Gruppe der gebrochen-linearenkomplexen Funktionen enthalten.(3) Umgekehrt sieht man aus
az + b
cz + d=a
c+
bc− adc(cz + d)
fur c 6= 0, dass jede gebrochen-lineare Funktion sich als Komposition der oben angegebenenErzeuger schreiben lasst. Entsprechend gilt das, wenn wir z durch z erzeugen. Daraus folgtauch die umgekehrte Inklusion: Jede gebrochen-lineare komplexe oder konjugiert-komplexeFunktion ist eine Mobiustransformation.
Insbesondere sehen wir also, dass Mob+(2) ∼= PGL(2,C).Aus der Identifikation der Mobiusgruppe der Ebene mit komplex-projektiven Transformationenkonnen wir nun leicht mehrere wichtige Schlussfolgerungen ziehen
Korollar 8.11. (1) orientierungserhaltende Mobiustransformationen der Ebene erhalten daskomplexe Doppelverhaltnis
[z1, z2; z3, z4] =(z1 − z3)(z2 − z4)(z2 − z3)(z1 − z4)
,
fur vier beliebige komplexe Zahlen z1, z2, z3, z4 ∈ C ∪ {∞} von denen mindestens dreiverschieden sind, orientierungsumkehrende Mobiustransformationen konjugieren das Dop-pelverhaltnis.
(2) “6-Punkte-Formel”: Sind z1, z2, z3 und w1, w2, w3 jeweils drei verschiedene Werte, so gibtes genau eine gebrochen-lineare Funktion f ∈ PGL(2, z) mit f(zi) = f(wi).
(3) Vier Punkte z1, z2, z3, z4 ∈ C liegen genau dann auf einem Kreis, wenn ihr Doppelverhaltnisreell ist.
70

5. Juli 2012
8.4 Stereographische Projektion als Mobiusabbildung
Definition 8.12 (Stereographische Projektion). Sei Sn = S(0, 1) ⊂ Rn+1 die Einheitssphare,und sei H ⊂ Rn+1 die durch xn+1 = 0 (Variante 1) bzw. xn+1 = −1 (Variante 2) gegebeneHyperebene, welche wir (durch weglassen der konstanten letzten Koordinate, also 0 oder −1)mit Rn identifizieren konnen.Die stereographische Projektion ist die Abbildung
Sn → H ∪ {∞},
die dadurch gegeben wird, dass der Nordpol N ∈ SN auf∞ abgebildet wird, und jeder anderePunkt von P ∈ Sn auf eindeutigen Schnittpunkt der Geraden PN mit der Hyperebene H .
Variante 1:
N
O
H = {x ∈ Rn+1 | xn+1 = 0}
Sn
Variante 2:
N
O
H = {x ∈ Rn+1 | xn+1 = −1}
Sn
Proposition 8.13. Die Stereographische Projektion ist die Einschrankung einer Mobiustrans-formation Rn+1∪{∞} → Rn+1∪{∞}, namlich der Sphareninversion in der Sphare S(N,
√2)
in Variante 1 bzw. der Sphare S(N, 2) in Variante 2.
Beweis. Die Sphareninversion bildet (in beiden Varianten) Geraden durch den Mittelpunkt Nder Inversionssphare auf Geraden durch N ab, andererseits die Sphare Sn auf die HyperebeneH∪{∞} ab — also den Schnittpunkt jeder Gerade mit S \{N} auf den Schnittpunkt derselbenGeraden mit H . Daraus folgt schon alles.
Korollar 8.14. Die stereographische Projektion ist konform.
71

Korollar 8.15. Mob(n) ist genau die Menge aller bijektiven Abbildungen f : Sn → Sn, dieKreise auf Kreise abbilden. Genauso ist dies die Menge aller bijektiven Abbildungen, die (n−1)-dimensionale Teilspharen auf ebensolche abbilden.
Beweis. Mit Hilfe der (inversen) stereographischen Transformation konnen wir die n-dimensionaleMobiusgeometrie auch auf der n-dimensionalen Sphare X := Sn ⊂ Rn+1 interpretieren.Damit transportieren wir die Aussage, dass die Mobiustransformationen auf X = Rn ∪ {∞}genau die bijektiven Abbildungen sind, die Hyperebenen und Spharen auf Hyperebenen undSpharen abbilden — und genauso Kreise und Geraden auf Kreise und Geraden.
8.5 Lorentz-Geometrie
Definition 8.16. Fur p, q ≥ 0 bezeichnet Rp,q den Vektorraum Rn+1 mit der Bilinearform
〈x, y〉 := x1y1 + · · ·+ xpyp − xp+1yp+1 − · · · − xp+qyp+q,
die wir als Skalarprodukt bezeichnen.
Allgemeiner konnten wir mit einen endlich-dimensionalen reellen Vektorraum Rm arbeiten, aufdem eine symmetrische Bilinearform gegeben ist, die nicht degeneriert (die also vollen Ranghat: nur der Nullvektor ergibt mit jedem anderen Vektor Null), die aber nicht notwendigerweisepositiv definit ist.In dieser Situation kann man den Algorithmus von Gram–Schmidt so anpassen, dass er docheine “Orthogonalbasis” e1, . . . , en liefert, fur die
〈ei, ej〉 =
1 fur 1 ≤ i = j ≤ p,
−1 fur p < i = j ≤ p+ q,
0 fur i 6= j
gilt. Hier ist p die maximale Dimension eines Unterraums, auf dem 〈·, ·〉 positiv definit ist,q die maximale Dimension eines Unterraums, auf dem das Skalarprodukt negativ definit ist.Insbesondere gilt p+ q = m (weil das Skalarprodukt nach Annahme nicht degeneriert ist), unddie Kennzahlen p und q sind fur alle Orthogonalbasen dieselben. Das Paar (p, q) heißt der Indexdes Vektorraums.Mit O(p, q) bezeichnet man die Gruppe aller orthogonalen Transformationen auf Rp,q, die alsodas Skalarprodukt erhalten. Uns interessiert im Folgenden besonders der Spezialfall q = 1.
Definition 8.17 (Lorentz-Raum). Der Raum Rn,1, also der Vektorraum Rn+1 mit dem Skalar-produkt
〈x, y〉 := x1y1 + · · ·+ xnyn − xn+1yn+1
heißt ein Lorentz-Vektorraum.Die Lorentz-Gruppe aller linearen Transformationen T : Rn+1 → Rn+1, die das Skalarprodukterhalten, fur die also 〈Tv, Tw〉 = 〈v, w〉 fur alle v, w gilt, wird mit O(n, 1) bezeichnet.
72
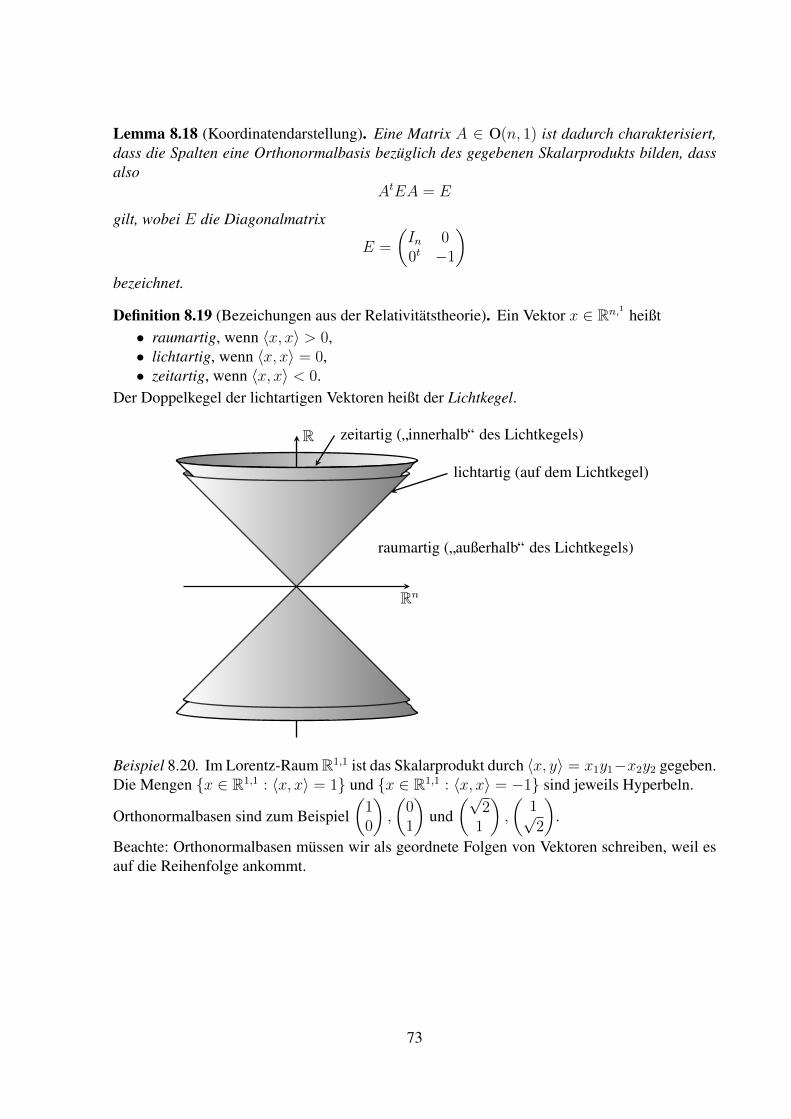
Lemma 8.18 (Koordinatendarstellung). Eine Matrix A ∈ O(n, 1) ist dadurch charakterisiert,dass die Spalten eine Orthonormalbasis bezuglich des gegebenen Skalarprodukts bilden, dassalso
AtEA = E
gilt, wobei E die Diagonalmatrix
E =
(In 00t −1
)bezeichnet.
Definition 8.19 (Bezeichungen aus der Relativitatstheorie). Ein Vektor x ∈ Rn,1 heißt• raumartig, wenn 〈x, x〉 > 0,• lichtartig, wenn 〈x, x〉 = 0,• zeitartig, wenn 〈x, x〉 < 0.
Der Doppelkegel der lichtartigen Vektoren heißt der Lichtkegel.
Rn
R
raumartig (”außerhalb“ des Lichtkegels)
lichtartig (auf dem Lichtkegel)
zeitartig (”innerhalb“ des Lichtkegels)
Beispiel 8.20. Im Lorentz-Raum R1,1 ist das Skalarprodukt durch 〈x, y〉 = x1y1−x2y2 gegeben.Die Mengen {x ∈ R1,1 : 〈x, x〉 = 1} und {x ∈ R1,1 : 〈x, x〉 = −1} sind jeweils Hyperbeln.
Orthonormalbasen sind zum Beispiel(
10
),
(01
)und
(√2
1
),
(1√2
).
Beachte: Orthonormalbasen mussen wir als geordnete Folgen von Vektoren schreiben, weil esauf die Reihenfolge ankommt.
73
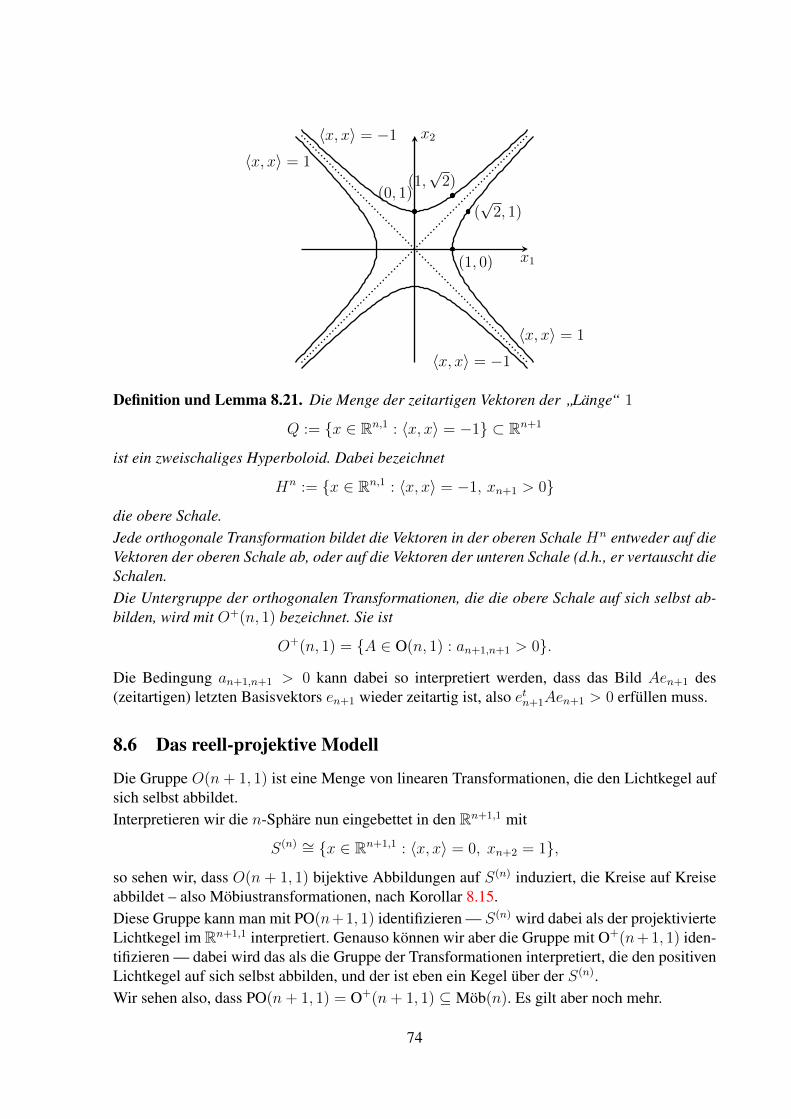
x1
x2
(1, 0)
(0, 1)(√
2, 1)
(1,√
2)
〈x, x〉 = 1
〈x, x〉 = −1
〈x, x〉 = 1
〈x, x〉 = −1
Definition und Lemma 8.21. Die Menge der zeitartigen Vektoren der ”Lange“ 1
Q := {x ∈ Rn,1 : 〈x, x〉 = −1} ⊂ Rn+1
ist ein zweischaliges Hyperboloid. Dabei bezeichnet
Hn := {x ∈ Rn,1 : 〈x, x〉 = −1, xn+1 > 0}
die obere Schale.Jede orthogonale Transformation bildet die Vektoren in der oberen Schale Hn entweder auf dieVektoren der oberen Schale ab, oder auf die Vektoren der unteren Schale (d.h., er vertauscht dieSchalen.Die Untergruppe der orthogonalen Transformationen, die die obere Schale auf sich selbst ab-bilden, wird mit O+(n, 1) bezeichnet. Sie ist
O+(n, 1) = {A ∈ O(n, 1) : an+1,n+1 > 0}.
Die Bedingung an+1,n+1 > 0 kann dabei so interpretiert werden, dass das Bild Aen+1 des(zeitartigen) letzten Basisvektors en+1 wieder zeitartig ist, also etn+1Aen+1 > 0 erfullen muss.
8.6 Das reell-projektive Modell
Die Gruppe O(n+ 1, 1) ist eine Menge von linearen Transformationen, die den Lichtkegel aufsich selbst abbildet.Interpretieren wir die n-Sphare nun eingebettet in den Rn+1,1 mit
S(n) ∼= {x ∈ Rn+1,1 : 〈x, x〉 = 0, xn+2 = 1},
so sehen wir, dass O(n + 1, 1) bijektive Abbildungen auf S(n) induziert, die Kreise auf Kreiseabbildet – also Mobiustransformationen, nach Korollar 8.15.Diese Gruppe kann man mit PO(n+1, 1) identifizieren — S(n) wird dabei als der projektivierteLichtkegel im Rn+1,1 interpretiert. Genauso konnen wir aber die Gruppe mit O+(n+ 1, 1) iden-tifizieren — dabei wird das als die Gruppe der Transformationen interpretiert, die den positivenLichtkegel auf sich selbst abbilden, und der ist eben ein Kegel uber der S(n).Wir sehen also, dass PO(n+ 1, 1) = O+(n+ 1, 1) ⊆ Mob(n). Es gilt aber noch mehr.
74
Theorem 8.22 (Das reell-projektive Modell der Mobiusgeometrie). Die n-dimensionale Mobius-geometrie kann durch die Menge X = Sn ⊂ Rn+1 ⊂ RPn+1 mit der Gruppe
PO(n+ 1, 1) = O+(n+ 1, 1) = Mob(n)
dargestellt werden.
Beweis. Um dies zu beweisen, mussen wir nur noch zeigen, dass die Transformationen, die dieMobiusgruppe erzeugen, mittels der stereographischen Projektion auf die Sphare Sn transpor-tiert, durch projektive Abbildungen dargestellt werden konnen, die die Sphare fest halten.
Die (n−1)-dimensionalen Unterspharen der Sn konnen hierbei mit Hyperebenen im RPn+1 in-terpretiert werden, die Sn echt schneiden — und diese konnen wir mit ihren Normalenvektoren,also den raumartigen Punkten in RPn+1 identifiziert werden, also mit den Punkten “außerhalb”der Sphare Sn ⊂ Rn+1. Man verifizierte dafur, dass “außerhalb” hier wohldefiniert ist . . .
Korollar 8.23 (Darstellung von Mobiustransformationen durch Matrizen). Mobiustransforma-tionen konnen durch die (n+ 2)× (n+ 2)-Matrizen in A ∈ O+(n+ 1, 1) dargestellt werden.
[1] Boris A. Springborn. Geometry I. Lecture Notes, TU Berlin/Berlin Mathematical School,2007/08, 59 pp., ftp://ftp.math.tu-berlin.de/pub/Lehre/GeometryI/WS07/geometry1_ws07.pdf.
75
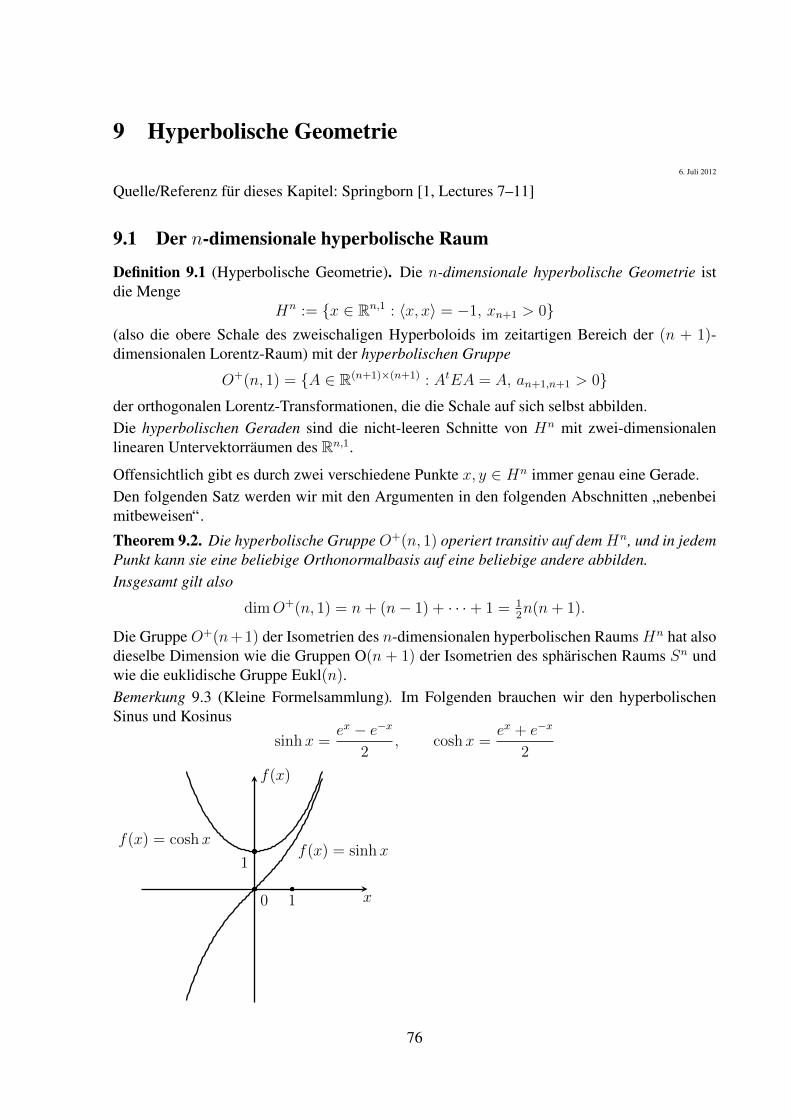
9 Hyperbolische Geometrie6. Juli 2012
Quelle/Referenz fur dieses Kapitel: Springborn [1, Lectures 7–11]
9.1 Der n-dimensionale hyperbolische Raum
Definition 9.1 (Hyperbolische Geometrie). Die n-dimensionale hyperbolische Geometrie istdie Menge
Hn := {x ∈ Rn,1 : 〈x, x〉 = −1, xn+1 > 0}(also die obere Schale des zweischaligen Hyperboloids im zeitartigen Bereich der (n + 1)-dimensionalen Lorentz-Raum) mit der hyperbolischen Gruppe
O+(n, 1) = {A ∈ R(n+1)×(n+1) : AtEA = A, an+1,n+1 > 0}der orthogonalen Lorentz-Transformationen, die die Schale auf sich selbst abbilden.Die hyperbolischen Geraden sind die nicht-leeren Schnitte von Hn mit zwei-dimensionalenlinearen Untervektorraumen des Rn,1.
Offensichtlich gibt es durch zwei verschiedene Punkte x, y ∈ Hn immer genau eine Gerade.Den folgenden Satz werden wir mit den Argumenten in den folgenden Abschnitten ”nebenbeimitbeweisen“.
Theorem 9.2. Die hyperbolische Gruppe O+(n, 1) operiert transitiv auf dem Hn, und in jedemPunkt kann sie eine beliebige Orthonormalbasis auf eine beliebige andere abbilden.Insgesamt gilt also
dimO+(n, 1) = n+ (n− 1) + · · ·+ 1 = 12n(n+ 1).
Die Gruppe O+(n+ 1) der Isometrien des n-dimensionalen hyperbolischen Raums Hn hat alsodieselbe Dimension wie die Gruppen O(n + 1) der Isometrien des spharischen Raums Sn undwie die euklidische Gruppe Eukl(n).Bemerkung 9.3 (Kleine Formelsammlung). Im Folgenden brauchen wir den hyperbolischenSinus und Kosinus
sinhx =ex − e−x
2, coshx =
ex + e−x
2
x
f(x)
1
1
0
f(x) = sinh xf(x) = cosh x
76
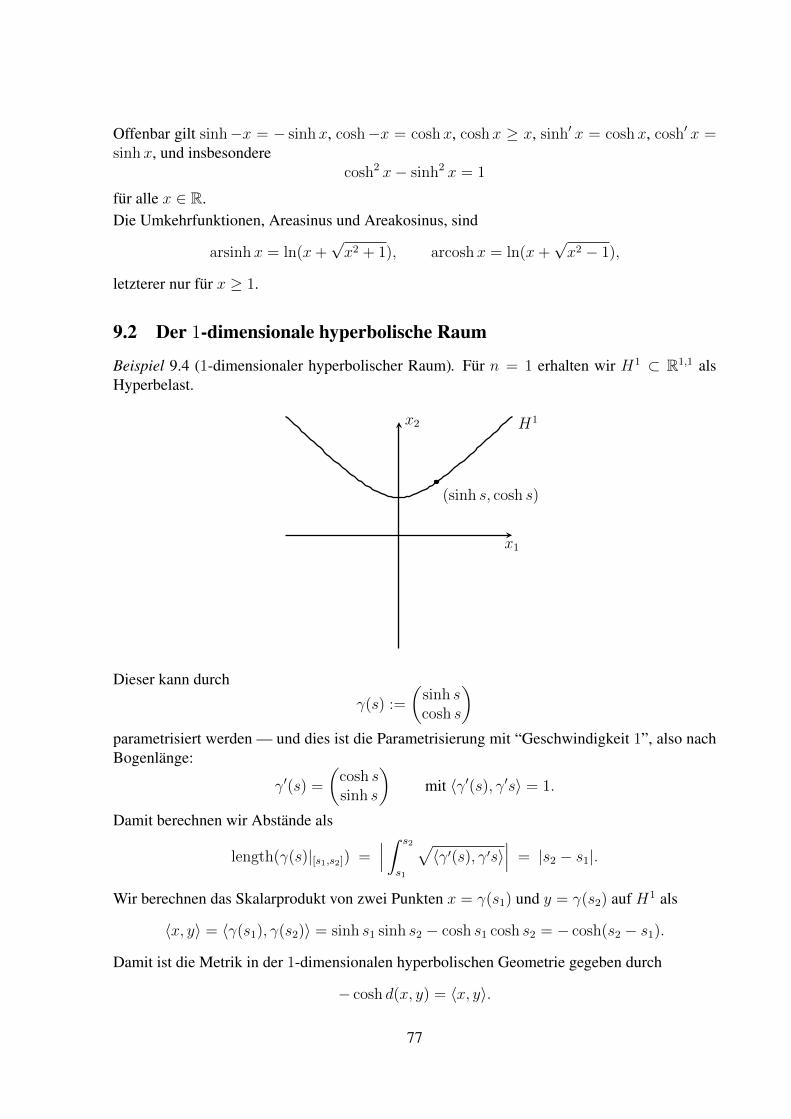
Offenbar gilt sinh−x = − sinhx, cosh−x = coshx, coshx ≥ x, sinh′ x = coshx, cosh′ x =sinhx, und insbesondere
cosh2 x− sinh2 x = 1
fur alle x ∈ R.Die Umkehrfunktionen, Areasinus und Areakosinus, sind
arsinhx = ln(x+√x2 + 1), arcoshx = ln(x+
√x2 − 1),
letzterer nur fur x ≥ 1.
9.2 Der 1-dimensionale hyperbolische Raum
Beispiel 9.4 (1-dimensionaler hyperbolischer Raum). Fur n = 1 erhalten wir H1 ⊂ R1,1 alsHyperbelast.
x1
x2 H1
(sinh s, cosh s)
Dieser kann durch
γ(s) :=
(sinh scosh s
)parametrisiert werden — und dies ist die Parametrisierung mit “Geschwindigkeit 1”, also nachBogenlange:
γ′(s) =
(cosh ssinh s
)mit 〈γ′(s), γ′s〉 = 1.
Damit berechnen wir Abstande als
length(γ(s)|[s1,s2]) =∣∣∣ ∫ s2
s1
√〈γ′(s), γ′s〉
∣∣∣ = |s2 − s1|.
Wir berechnen das Skalarprodukt von zwei Punkten x = γ(s1) und y = γ(s2) auf H1 als
〈x, y〉 = 〈γ(s1), γ(s2)〉 = sinh s1 sinh s2 − cosh s1 cosh s2 = − cosh(s2 − s1).
Damit ist die Metrik in der 1-dimensionalen hyperbolischen Geometrie gegeben durch
− cosh d(x, y) = 〈x, y〉.
77
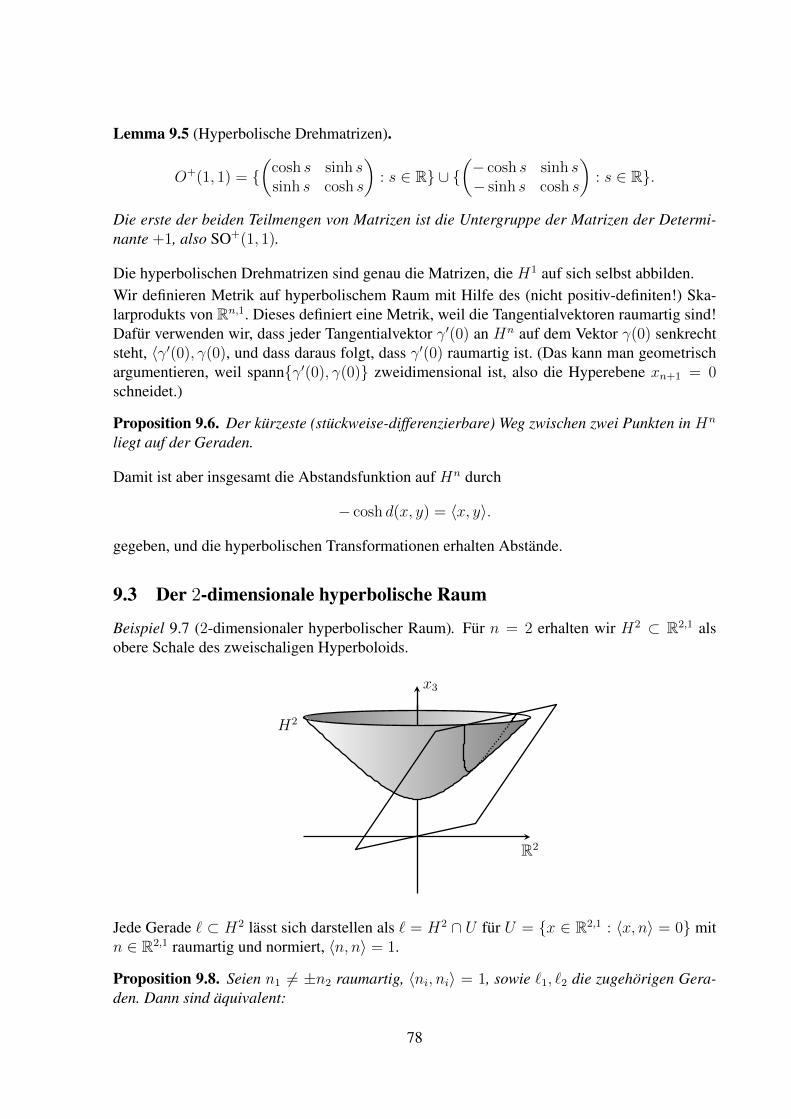
Lemma 9.5 (Hyperbolische Drehmatrizen).
O+(1, 1) = {(
cosh s sinh ssinh s cosh s
): s ∈ R} ∪ {
(− cosh s sinh s− sinh s cosh s
): s ∈ R}.
Die erste der beiden Teilmengen von Matrizen ist die Untergruppe der Matrizen der Determi-nante +1, also SO+(1, 1).
Die hyperbolischen Drehmatrizen sind genau die Matrizen, die H1 auf sich selbst abbilden.Wir definieren Metrik auf hyperbolischem Raum mit Hilfe des (nicht positiv-definiten!) Ska-larprodukts von Rn,1. Dieses definiert eine Metrik, weil die Tangentialvektoren raumartig sind!Dafur verwenden wir, dass jeder Tangentialvektor γ′(0) an Hn auf dem Vektor γ(0) senkrechtsteht, 〈γ′(0), γ(0), und dass daraus folgt, dass γ′(0) raumartig ist. (Das kann man geometrischargumentieren, weil spann{γ′(0), γ(0)} zweidimensional ist, also die Hyperebene xn+1 = 0schneidet.)
Proposition 9.6. Der kurzeste (stuckweise-differenzierbare) Weg zwischen zwei Punkten in Hn
liegt auf der Geraden.
Damit ist aber insgesamt die Abstandsfunktion auf Hn durch
− cosh d(x, y) = 〈x, y〉.
gegeben, und die hyperbolischen Transformationen erhalten Abstande.
9.3 Der 2-dimensionale hyperbolische Raum
Beispiel 9.7 (2-dimensionaler hyperbolischer Raum). Fur n = 2 erhalten wir H2 ⊂ R2,1 alsobere Schale des zweischaligen Hyperboloids.
R2
x3
H2
Jede Gerade ` ⊂ H2 lasst sich darstellen als ` = H2 ∩ U fur U = {x ∈ R2,1 : 〈x, n〉 = 0} mitn ∈ R2,1 raumartig und normiert, 〈n, n〉 = 1.
Proposition 9.8. Seien n1 6= ±n2 raumartig, 〈ni, ni〉 = 1, sowie `1, `2 die zugehorigen Gera-den. Dann sind aquivalent:
78
(i) `1 ∩ `2 6= ∅,(ii) Das Skalarprodukt 〈·, ·〉 eingeschrankt auf spann{n1, n2} ist positiv definit,
(iii) |〈n1, n2〉| < 1.
Beweis. (i)⇒(ii): Fur den Schnittpunkt x gilt {x}⊥ = spann{n1, n2}. Alle Vektoren, die auf xsenkrecht stehen, sind raumartig.(ii)⇒(i): spann{n1, n2}⊥ ist eindimensional, und wird von einem zeitartigen Vektor aufge-spannt.(ii)⇒(iii): Wir stellen das Skalarprodukt eingeschrankt auf spann{n1, n2}⊥ durch die Matrix
M =
(〈n1, n1〉 〈n1, n2〉〈n2, n1〉 〈n2, n2〉
)=
(1 〈n1, n2〉
〈n2, n1〉 1
)dar. Das Skalarprodukt ist positiv definit, wenn die Matrix positiv definit ist, und dafur muss dieDeterminante positiv sein, also 1− 〈n1, n2〉2 > 0.
Lemma 9.9 (Winkel). Seien `1, `2 zwei sich schneidende Geraden in der hyperbolischen EbeneH2, und seien hi := {y ∈ H1 : 〈y, ni〉 ≥ 0} die Halbebenen, die durch `1, `2 gegeben sind, mitEinheitsnormalenvektoren n1, n2.Dann gibt es eine eindeutige hyperbolische Rotation (in H2), gegeben durch eine Matrix/Transformation T ∈ O(2, 1), um den Schnittpunkt {x} = `1 ∩ `2, die h1 in h2 uberfuhrt und xfest lasst.Der Drehwinkel ist gegeben durch
cosα = 〈n1, n2〉;
das ist auch der Außenwinkel des Kegels h1 ∩ h2 mit Spitze x in der hyperbolischen Ebene.
Beweis. Nach Konstruktion steht x senkrecht auf n1 und n2. Verwendet wird die Drehung umdie von x aufgespannte Achse, die n1 in n2 uberfuhrt. Dabei ist der Winkel zwischen n1 und n2
genau der Winkel zwischen den 2-dimensionalen Unterraumen des R2,1, die `1 und `2 enthalten,und das ist nach Definition der Winkel zwischen `1 und `2.
Beispiel 9.10 (Hyperbolische Dreiecke). Seien A,B,C ∈ H2 nicht kollinear (also als Vek-toren im R2,1 linear unabhangig). Dann bestimmen sie drei unterschiedliche Geraden, die einhyperbolisches Dreieck4ABC ⊂ H2 begrenzen.Seien A′, B′, C ′ ⊂ R2,1 die zugehorigen normierten raumartigen Normalenvektoren, die alsonicht in R2,1 liegen, mit 〈A,A′〉 > 0, usw. Seien hA′ , hB′ , hC′ die zugehorigen Halbraume, mithA′ = {y ∈ H2 : 〈y, A′〉 ≥ 0, usw. Dann kann gilt
4ABC = hA′ ∩ hB′ ∩ hC′ .
Die Kantenlangen im Dreieck sind gegeben durch
− cosh a = 〈B,C〉 usw.
und die Winkel durch− cosα = 〈B′, C ′〉 usw.
(Achtung: hier steht ein echter Kosinus, kein cosh!)
79

Theorem 9.11 (Kosinussatz). Im hyperbolischen Dreieck mit Kantenlangen a, b, c und Außen-winkeln α, β, γ gilt der Seitenkosinussatz
cosα =− cosh a+ cosh b cosh c
sinh b sinh c
und der Winkelkosinussatz
cosh a =cosα + cosh β cosh γ
sin β sin γ.
und entsprechend fur cos β und cos γ bzw. cosh b und cosh c bei gleichzeitiger Permutation vona→ b→ c und α→ β → γ.
Beweis. Analog zum spharischen Fall, Theorem 7.10!
Theorem 9.12 (Dreiecksungleichungen hyperbolisch). Ein hyperbolisches Dreieck mit Kan-tenlangen a, b, c > 0 existiert dann und nur dann, wenn die Dreicksungleichungen gelten (alsoa < b+ c etc.).Ein hyperbolisches Dreieck mit Innenwinkeln α, β, γ > 0 existiert dann und nur dann, wennα + β + γ < π.
Skizze. (1) Zunachst zeigen wir, dass die Gram-Matrix G = V tV fur V = (AB C) vonA,B,C, die ja linear unabhangig sind, Signatur (2, 1) hat — in anderen Worten, die zugehorigequadratische Form xtGx hat diese Signatur.(2) Dann berechnen wir die Gram-Matrix explizit, als
G =
−1 − cosh c − cosh b− cosh c −1 − cosh a− cosh b − cosh a −1
und verwenden das Kriterium, dass sich die Signatur aus den Hauptminoren ablesen lasst: DieDimension des negativ-definiten Teils ist die Anzahl der Vorzeichenwechsel in der Folge G0 :=1, G1 := g11 = −1, G2 = 1 − cosh2 c = − sinh c < 0. Also hat G genau dann die Signatur(2, 1), wenn die Determinante detG < 0 ist.(3) Explizite Berechnung der Determinante und Halbwinkelformeln ergeben
detG = −4 sinh −a+b+c2
sinh a−b+c2
sinha+ b− c
2sinh a+b+c
2
und man uberlegt sich, dass diese Determinante genau dann negativ ist, wenn die drei Dreiecks-ungleichungen gelten.(Hinweis: Es kann von den drei Dreiecksungleichungen nicht mehr als eine falsch sein, weilaus a > b+ c und b > a+ c folgt 0 > 2c.)(4) Und dann ganz analog fur G′, wobei die Rechnung ergibt
detG′ = −4 cos −α+β+γ2
cos α−β+γ2
cos α+β−γ2
cosα + β + γ
2.
80

9.4 Die Modelle von Klein und Poincare
Bezeichne im Folgenden Dn := {u ∈ Rn : |u| < 1} den offenen Einheitsball im Rn, also dasInnere des abgeschlossenen Einheitsballs Bn. Insbesondere ist also D2 eine offene Kreisschei-be.
Definition 9.13 (Das Kreisscheibenmodell von Klein). Die bijektive Abbildung
κ : H2 −→ D2
x1x2x3
7−→ (x1x3x2x3
)ubertragt die 2-dimensionale hyperbolische Geometrie auf die offenen Kreisscheibe D2. Diesergibt das Klein’sche Kreisscheibenmodell fur die 2-dimensionale hyperbolische Geometrie.Die Geraden sind darin als die nicht-leeren Schnitte von D2 mit affinen Geraden des R2 gege-ben.Die Gruppenaktion der O+(2, 1) sowie Winkel und Abstande werden durch κ auf das Modellubertragen, konnen/mussen also mit Hilfe der Umkehrabbildung
κ−1 : D2 −→ H2
(u1u2
)7−→ 1
1− u21 − u22
u1u21
ubertragen, zum Beispiel durch d(u, u′) := d(κ−1(u), κ−1(u′)).
Definition 9.14 (parallel, ultraparallel). Zwei Geraden `1, `2 schneiden sich, wenn die Norma-lenvektoren |〈n1, n2〉| < 1 erfullen.Sie heißen parallel, wenn |〈n1, n2〉| = 1 gilt, was einem “Schnittpunkt im Unendlichen” (alsoauf dem Rand des Kleinschen Kreisscheibenmodells) entspricht. In diesem Fall schneiden sichdie zugehorigen 2-dimensionalen Unterraume U1, U2 ⊂ R2,1 im Lichtkegel.Sie heißen ultraparallel, wenn |〈n1, n2〉| > 1 gilt, was einem “Schnittpunkt jenseits des Un-endlichen” (also außerhalb des Kleinschen Kreisscheibenmodells) entspricht. In diesem Fallschneiden sich die zugehorigen 2-dimensionalen Unterraume U1, U2 ⊂ R2,1 in einem raumarti-gen Untervektorraum.In der Zeichnung schneiden sich `1 und `2, `2 und `3 sind parallel, `1 und `3 sind ultraparallel,
`1
`2
`3
Proposition 9.15. Ist ` ⊂ H2 eine Gerade und x /∈ `, so gibt es zwei verschiedene Geradenund unendlich viele ultraparallele Geraden zu ` durch x.
81

Das Klein-Modell fur den hyperbolischen Raum “funktioniert” ganz genauso in hoheren Di-mensionen: Die bijektive Abbildung
κ : Hn −→ Dn
(x
xn+1
)7−→ 1
xn+1x
ubertragt die n-dimensionale hyperbolische Geometrie auf den offenen Ball Dn; die Umkehr-abbildung ist gegeben durch
κ−1 : Dn −→ Hn u 7−→ 11−|u|2
(u1
).
Das Klein-Modell hat die besondere Eigenschaft, dass die Geraden des Modells genau die Ge-raden des Rn sind (die den offenen Ball Dn schneiden). Weiter kann man das Modell mit demInneren der Sphare Sn ⊂ Rn+1 ⊂ RPn+1 identifizieren, und daran sehen, dass die Geometrieauf dem Rand des Klein-Modells genau wieder die Mobiusgeometrie Mob(n) ist.Das Klein-Modell ist aber nur eines von mehreren Modellen fur die n-dimensionale hyperboli-sche Geometrie, die alle ihre interessanten Aspekte haben, und daher ein intensiveres Studiumwert waren. Wir geben hier aus Zeitmangel nur noch ein solches Modell an.
Definition 9.16 (Das Kreisscheibenmodell von Poincare). Die bijektive Abbildung
π : H2 −→ D2
x1x2x3
7−→ 1x3+1
(x1x2
)ubertragt die 2-dimensionale hyperbolische Geometrie auf die offenen Kreisscheibe D2. Diesergibt das Poincare’sche Kreisscheibenmodell fur die 2-dimensionale hyperbolische Geometrie.Die Geraden sind darin als die Schnitte von D2 mit Kreisen gegeben, die den Rand S1 = ∂D2
der Kreisscheibe senkrecht schneiden.Die Gruppenaktion der O+(2, 1) sowie Winkel und Abstande werden durch π auf das Modellubertragen, konnen/mussen also mit Hilfe der Umkehrabbildung
π−1 : D2 −→ H2
(u1u2
)7−→ 1
1−u21−u22
2u12u2
1 + u21 + u22
ubertragen, zum Beispiel durch d(u, u′) := d(π−1(u), π−1(u′)).
Auch das Poincare-Modell kann analog fur den n-dimensionalen Fall konstruiert werden:
Hn
O
S
Dn
x
π(x)
82
Theorem 9.17 (Geraden und Unterraume des Poincare-Modells). Die stereographische Pro-jektion π : Hn → Dn ⊂ Rn bildet Schnitte von Hn mit linearen Unterraumen des Rn+1 aufSchnitte von Dn mit Spharen und mit linearen Unterraumen ab, die senkrecht auf dem RandSn−1 = ∂Dn des Modells stehen. (Die linearen Unterraume gehen also durch den Mittelpunktvon Dn.)
Theorem 9.18 (Das Poincare-Modell ist konform). Das Poincare-Modell ist konform: Winkelsind euklidische Winkel!Die Metrik ist im Poincare-Modell zum Beispiel dadurch gegeben, dass
d(0, y) = 12
ln1 + |y|1− |y|
.
Proposition 9.19 (ideale Dreiecke). Alle “idealen” Dreiecke in H2 (also Dreiecke, deren Sei-ten parallel sind, und deren Ecken auf dem Rand des Modells “im Unendlichen” liegen, sindkongruent. Sie haben alle die Flache π.
Proposition 9.20 (hyperbolische Dreiecksflache). Die Flache eines hyperbolischen Dreiecksmit den Winkeln α, β, γ ist
A(4ABC) = π − α− β − γ.
Alle endlichen hyperbolischen Dreiecke haben also eine Flache, die kleiner als π ist.
Man uberlege sich dazu, dass beim Zerschneiden eines Dreiecks in zwei Dreiecke (mit einemSchnitt durch einen Eckpunkt) sich die Große π − α− β − γ additiv verhalt.Man uberlegt sich genauso, dass in der hyperbolischen Ebene regelmaßige n-Ecke beliebig klei-ne Winkel haben — im Grenzfall von “idealen” regelmaßigen n-Ecken sind die Winkel gleich 0.Andererseits sind die Winkel immer kleiner als die Winkel von regelmaßigen euklidischen n-Ecken. Zum Beispiel hat ein regelmaßiges euklidisches Funfeck Winkel gleich 3π/5 = 108◦,regelmaßige hyperbolische Funfecke haben beliebige Winkel im offenen Intervall (0◦, 108◦).Genauso existieren hyperbolische Dreiecke mit beliebigen Winkeln 0 < α, β, γ fur α+β+γ <π. Experimentiert man nun mit Spiegelungen an den Kanten von solchen Dreiecken, so er-gibt dies fur besondere Winkeln Pflasterungen der hyperbolischen Ebene mit Dreiecken, re-gelmaßigen n-Ecken, usw.: wie man sie zum Beispiel aus Graphiken von Maurits CornelisEscher1 kennen kann.
[1] Boris A. Springborn. Geometry I. Lecture Notes, TU Berlin/Berlin Mathematical School,2007/08, 59 pp., ftp://ftp.math.tu-berlin.de/pub/Lehre/GeometryI/WS07/geometry1_ws07.pdf.
1Hollandischer Graphiker, 1898–1972, http://en.wikipedia.org/wiki/M._C._Escher
83
10 Perspektiven der Geometrie
10.1 Gruppentheorie
Nach Felix Klein: die Gruppe bestimmt die GeometrieBespiel: Euklidische Geometrie der Ebene: Die Elemente der Ordnung 2 sind genau die Gera-denspiegelungen und die Punktspiegelungen – wobei die Punktspiegelungen die Elemente sind,die selbst Quadrate sind. Also kann man die Punkte und die Geraden der Ebene eindeutig mitGruppenelementen identifizieren.Analog kann man versuchen, die Gruppen von bekannten Geometrien auch algebraisch zu ver-stehen, und auch interessante Gruppen geometrisch zu interpretieren. Dies bietet sich bei Lie-gruppen an (die glatte Mannigfaltigkeiten sind; benannt nach Sophus Lie), wird aber zum Bei-spiel auch fur endliche Gruppen/Geometrien studiert.
10.2 Differenzialgeometrie
Geschlossene Flachen (technisch: orientierbare, zusammenhangende, kompakte 2-dimensionaleMannigfaltigkeiten ohne Rand) kann man klassifizieren — und dann beweisen, dass jede sol-che Mannigfaltigkeit eine Metrik kompakter Krummung hat, also vollstandig als Raum mitkonstanter Krummung modelliert werden kann: die Sphare S2 als Raum positiver Krummung 1und spharischer Geometrie, der Torus (S1)2 als flacher Raum von konstanter Krummung 0 undeuklischer Geometrie, sowie die Flachen vom Geschlecht g > 1 als Raume konstanter negativerKrummung mit hyperbolsicher Geometrie. Diese Diskussion ist klassisch, man kennt sie in derFunktionentheorie als Uniformisierung, ein wesentlicher Schritt ist von Paul Koebe.Fur geschlossene Mannigfaltigkeiten der Dimension 3 sind erst mit dem Beweis der Geome-trisierungsvermutung von William Thurston in diesem Jahrtausend durch Grigrij Perelman einentsprechendes Resultat: es besagt grob, dass man jede Mannigfaltigkeit aufschneiden kannin Teile, die wiederum mit “Modellgeometrien” versehen werden konnen — dazu gehoren diespharische, flache und hyperbolische Geometrie wie auch einige andere. Achtung: Sehr schwie-rig.
10.3 Konforme Abbildungen
Kreispackungen in der Ebene sind ein nur scheinbar elementares Thema, das das Studium lohnt.So kann der Riemannsche Abbildungssatz aus der Funktionentheorie (“jedes einfachzusam-menhangende Gebiet in der komplexen Ebene kann mit einer komplex-differenzierbaren, alsokonformen, Abbildung auf eine Kreisscheibe abgebildet werden”) bewiesen werden, indem manerst den Kreispackungssatz beweist, und diesen dann fur Approximationen nutzt.Die Theorie der ebenen Kreispackungen ist also sehr reichhaltig, wahrend Kugelpackungen imHoherdimensionalen viel weniger verstanden sind. Es gibt hoherdimensional eben auch keinelokal-konformen Abbildungen, die nicht global konform waren — also nur die Mobiustransfor-mationen.Referenz: Stephenson [2]
84
10.4 Kugelpackungen
Betrachtet man Packungen von gleichgroßen Kugeln, so ist die Situation in der Ebene rechteinfach: Eine Kreisscheibe vom Radius 1 kann gleichzeitig 6 weitere Kreisscheiben vom selbenRadius beruhren, die sich nicht uberlappen. Man sagt, dass die Kusszahl in der Ebene, alsoDimension d = 2, gleich κ(2) = 6 ist.Genauso ist die dichteste Kugelpackung in der Ebene die offensichtliche, in der die Kreisschei-ben zeilenweise angeordnet werden.Wir diskutieren hier nur kurz die Kusszahlen in hoheren Dimensionen: Man weiß, dass κ(3) =12 ist — das ist als Newton–Gregory-Problem bekannt — sowie, dass κ(4) = 24 — das wurdeerst kurzlich bewiesen, zuerst von Oleg Musin, sowie, dass κ(8) = 240 und κ(24) = 196.560.Es gibt also in Dimensionen 8 und 24 ganz besondere geometrische Konstellationen, die wiedervon anderen Theorien abhangen: So verwendet man◦ in Dimension 4 die Ecken des 24-Zells, ein besonders interessantes 4-dimensionales Polytop,
das mit der Liegruppe F4 zusammenhangt;◦ in Dimension 8 das Wurzelgitter der Liegruppe E8, die in der Klassifikation der einfachen
Liegruppen als besonders interessante Struktur auftaucht;◦ in Dimension 24 das sogenannte Leech-Gitter, das man sowohl kodierungstheoretisch studie-
ren kann (mit dem Golay-Kode der Lange 24), als auch graphentheoretisch aus dem Graphendes Ikosaeders gewinnen kann. (Siehe [1]!)
Moral: Mit dem Studium der wichtigsten Geometrien haben wir die Buhne zur Verfugung, aufder viele spannende Strukturen existieren — deren Studium sich lohnt . . .
[1] Martin Aigner. Gitter, Codes und Graphen. Lecture Notes, FU Berlin, 1994/95.
[2] Kenneth Stephenson. Introduction to Circle Packing. The Theory of Discrete Analytic Functions.Cambridge University Press, Cambridge, 2005.
85