Embed Size (px)
DESCRIPTION
Referaat Halli efekti kohta.
Citation preview
EESTI MAAÜLIKOOL
Tehnikainstituut
…..
Halli efekti mõõtmisviisid ja konkreetne mõõtmine
Referaat
õppeaines “Mõõtmised ja andmetöötlus”
TE.0307
Tootmistehnika eriala
TA Mag. I
Üliõpilane: “.........” ................... 2014. a .................................---
Juhendaja: “.........” ................... 2014. a ......................... ---
Tartu 2014

Sisukord
Sissejuhatus............................................................................................................................................3
1. Halli efekt.......................................................................................................................................4
1.1. Halli efekti avastamine...........................................................................................................4
Halli efekt...........................................................................................................................................4
Halli tajur............................................................................................................................................6
2. Hall efekti kasutamine andurites....................................................................................................7
Why use the Hall effect?....................................................................................................................8
Halli efekti kasutavad sensorid...........................................................................................................8
Metallist labadega kontrollitav positsioonitajur.............................................................................8
Digitaalne voolutajur......................................................................................................................9
Lineaarne loolutajur.....................................................................................................................10
Mehaaniliselt juhitavad lülitid......................................................................................................10
Hammastajur................................................................................................................................11
Halli tajurite kasutusnäiteid..........................................................................................................12
Digitaalse väljundiga tajurite kasutusvaldkonnad:.......................................................................12
Lineaarse väljundiga tajurite kasutusvaldkonnad:........................................................................13
Halli tajuri positiivsed omadused.....................................................................................................13
Halli tajuri negatiivsed omadused....................................................................................................13
Halli efekti tajuri rakendusvõimalusi................................................................................................13
3. Positsiooni mõõtmine Halli tajuri abil...........................................................................................14
Katsetuste käik.................................................................................................................................15
Katsetulemused................................................................................................................................16
Kasutatud kirjandus..............................................................................................................................18
Sissejuhatus
Tänapäeva tööstusautomaatika ja olmeelektroonika on hulgaliselt täidetud erinevate andurite
ja nende tagasiside põhjal juhtsüsteeme reguleerivate kontrolleritega. Anduritel on seadmete
talitluses kanda tähtis roll, olla seadmele silmade ja kõrvade eest. Seepärast peavad andurid
olema kasutatavatele rakendustele vastava täpsuse ja omadustega. Nii palju, kui on erinevaid
andurite vajadusi seadmetele, on ka vastavaid andureid ja nende kombinatsioone välja
mõeldud. Ühed huvitavamad neist on Halli efektil põhinevad andurid.
Käesolevas töös seletatakse lahti Halli efekti avastamine ja olemus. Samuti tuuakse näiteid
halli efekti erinevatest rakendusvõimalustest tänapäeva tööstuses ja igapäevaseadmetes. Töö
lõpus on välja toodud reaalne katse konkreetse halli efekti anduri toel. Antud katses on
kasutatud halli andurit SS495A. Katse eesmärgiks oli uurida anduri staatilist karakteristikut,
kui sõltuvust väljundpinge ja magneti positsiooni vahel.
1. Halli efekt
1.1. Halli efekti avastamine
Halli efekti avastas dr Edwin Hall 1879 aastal, kui ta oli doktorant Johns Hopkinsi Ülikoolis
Baltimore’s. Hall püüdis tõestada 30 aastat tagasi välja pakutud elektronide voo teooriat. Dr
Hall leidis, et kui magnet oli paigutatud risti õhukese ristkülikukujulise kuldplaadiga, millest
vool läbi liikus, tekkis potentsiaalide erinevus plaadi vastasservades. Ta leidis, et see pinge oli
proportsionaalne vooluga, mis läbi juhi liikus. Kuigi Halli katsed olid omal ajal edukad ja
hästi vastuvõetud, ei leitud üle 70 aasta tulemustele rakendust väljaspool teoreetilise füüsika
valdkonda.[10]
1879. aastal avastati Halli efekt, mis piltlikult toimib nii: kui võtta metall-plaat ja ühendada
see vooluallikaga, siis liigub vool Menukast materjalist leiti veidralt käituvad osakesedplaadi
ühest otsast teise. Kui aga siis tuua plaadi kohale tugev vertikaalne magnetväli, siis mõjutab
see elektrone nii, et need hakkavad magnetvälja mõjul kõrvale kalduma ning plaadis tekib ka
ristsuunaline pinge. See pinge ehk Halli pinge on proportsionaalne magnetvälja tugevusega.
Kui plaat on pooljuht ning üliõhuke, siis on elektronide liikumine võimalik vaid teatud
kindlates kanalites, mis üksteise järel sulguvad, kui magnetväli tugevneb. Halli pinge kerkib
astmeliselt, vastavalt elektroni laengule. Kõik elektronid käituvad siin iseseisvalt, solistina.
Seda efekti nimetatakse Halli kvantefektiks ning selle avastuse eest anti 1985. aastal välja
Nobeli füüsikapreemia.
Kuid madalatel temperatuuridel hakkavad elektronid pooljuhikiles käituma nagu omapärane
veider vedelik. Elektronid asuvad tegutsema ühiselt ning tekivad veidrad osakesed, mille
laeng on elektroni laengust väiksem, näiteks kõigest kolmandik elektroni laengust. Selle
efekti, murdosalise kvant-Halli efekti eest anti füüsika-Nobel 1998. aastal. [3]
Halli efekt
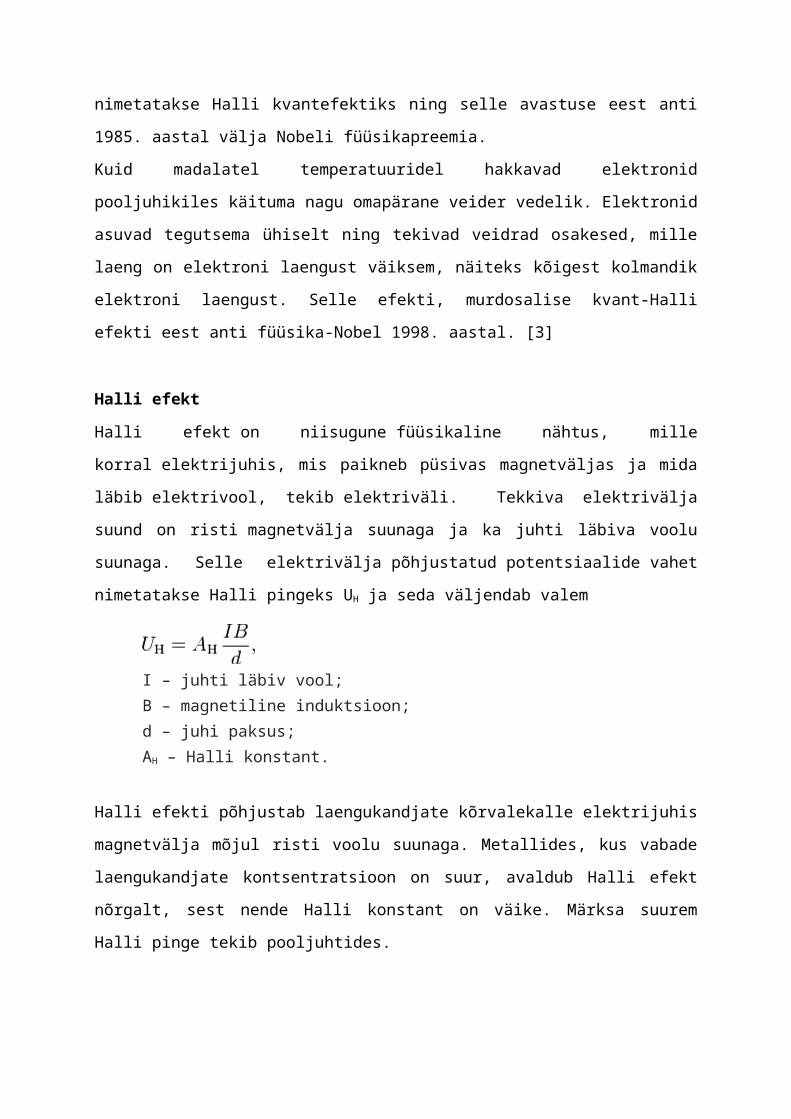
Halli efekt on niisugune füüsikaline nähtus, mille korral elektrijuhis, mis paikneb püsivas
magnetväljas ja mida läbib elektrivool, tekib elektriväli. Tekkiva elektrivälja suund on
risti magnetvälja suunaga ja ka juhti läbiva voolu suunaga. Selle
elektrivälja põhjustatud potentsiaalide vahet nimetatakse Halli pingeks UH ja seda väljendab
valem
I – juhti läbiv vool;
B – magnetiline induktsioon;
d – juhi paksus;
AH – Halli konstant.
Halli efekti põhjustab laengukandjate kõrvalekalle elektrijuhis magnetvälja mõjul risti voolu
suunaga. Metallides, kus vabade laengukandjate kontsentratsioon on suur, avaldub Halli efekt
nõrgalt, sest nende Halli konstant on väike. Märksa suurem Halli pinge tekib pooljuhtides.
Halli efekti on võimalik rakendada näiteks magnetomeetrina magnetilise induktsiooni
mõõtmiseks: kui läbi pooljuhtplaadi juhtida vool I, siis sellest põhjustatud Halli
pinge UH väärtuse järgi saab ülaltoodud valemi abil arvutada magnetilise
induktsiooni B. CMOS-tehnoloogia järgi valmistatud Halli andureid kasutatakse ka nurga,
pöörete arvu, asendi, kiirenduse jm suuruste mõõtmiseks.
Ameerika füüsik Edwin Hall kirjeldas hiljem tema järgi nimetatud nähtust 1879. aastal. [1]
Joonis 1. [6]
Halli tajur
Halli tajuri töö põhineb halli efektil. Halli tajurid valmistatakse õhukesest pooljuhtplaadist,
sest pooljuhis tekib küllalt kõrge Halli pinge. Need plaadid ‒ Halli elemendid ‒ on harilikult
integreeritud (kokku ehitatud) elektroonikalülitusega, mille väljundist
saadakse analoog- või digitaalsignaal. Kuna Halli efekt seob omavahel kolm füüsikalist
suurust: magnetilise induktsiooni, elektrivoolu ja elektrivälja (vastavalt ka elektripinget), saab
kahe teadaoleva suuruse järgi arvutada kolmanda. Seega osutub võimalikuks Halli tajuri abil
neid suurusi mõõta.
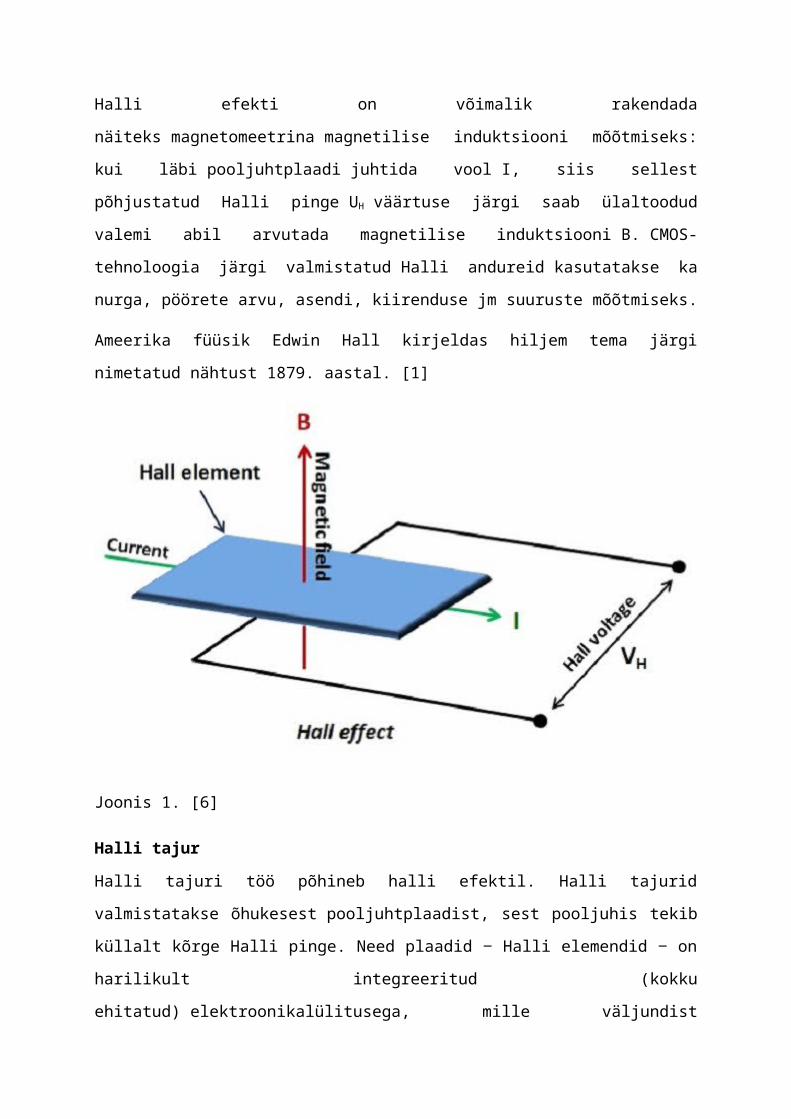
Joonis 1. Pöörete mõõtmine Halli tajuriga (roheline plaat) ja kahe magnetiga pöörleval kettal
Tööstuspraktikas on Halli tajurite peamiseks ülesandeks magnetvälja olemasolu või selle
muutumise kindlakstegemine, kusjuures anduri väljundsignaaliks on Halli pinge. Liikuvate
osade asendi, pöördenurga või pöörlemiskiiruse kohta signaalide saamiseks paigaldatakse
nendele osadele väikesed püsimagnetid. Niiviisi saadakse väljundsignaal ilma vahetu
elektrilise kontaktita; samuti ei mõjuta mõõtetulemusi anduri keskkonna seisund, näiteks
niiskus või mittemagnetilised osakesed.
Kasutatakse ka andureid, milles magnet ja Halli plaat on kokku ehitatud. Kui niisugusele
andurile läheneb mingi ferromagnetiline osa, kutsub muutuv magnetväli esile väljundsignaali.
Sensori väljundpinge mõõtmine annab seda täpsema tulemuse, mida püsivam on Halli plaati
läbiv vool ja mida täpsemalt mõõdetakse Halli pinget. Seepärast sisaldab Halli plaadiga
ühisel kiibil paiknev elektroonikalülitus lisaks võimendile püsivooluallika ja ka
temperatuurimuutuse kompenseerimise lülituse.
Rakendusnäiteid:
pöörleva keha (ratas, ketas, võll) pöörete arvu loendamine või pöörlemiskiiruse
mõõtmine;
elektriahelate kontaktivaba lülitamine;
kontaktivaba (harjadeta) kommutatsioon elektrimootoris;
auto mootori silindrites kütuse pihustamise ja süütamise hetke määramine
sõltuvalt nukkvõlli asendist (nukkvõllile kinnitatud magnetid tekitavad paigalseisvast
Halli plaadist möödumisel sensoris pingeimpulsid).
Halli andurit kasutatakse tüürsignaali allikana mitmesugustes juhtimise, reguleerimise ja
signaliseerimise süsteemides. [2]
-------------------------------------------------------------
Halli efektist on oldud teadlik juba üle saja aasta, kuid märkimisväärselt on seda hakatud
rakendama alles viimase kolme kümnendi vältel. Esimene praktiline rakendus (väljaspool
laborikatseid) oli 1950ndatel aastatel mikrolaine võimsussensori näol. Pooljuhtide
masstootmisega hoogustus ka Halli efekti kasutamine suures mahus toodetavates
elektroonikaseadmetes. MICRO SWITCH Sensing ja Control tõid kaasa revolutiooni
klaviatuuritööstusse 1968 aastal, kui tutvustati esimest klaviatuuri, milles oli rakendatud Halli
efekti. Esmakordselt oli Halli efekti andurielement ja seda kogu süsteemiga siduv elektroonka
kombineeritud ühte integreeritud ringi. Tänapäeval on Halli efekti kasutavad seadmed
kasutuses paljudes laiatarbe toodetes: arvutites, õmblusmasinates, autodes, lennukites ja isegi
meditsiiniseadmetes.
2. Hall efekti kasutamine andurites
Halli efekti saab ideaalselt kasutada sensoritehnoloogias. Hall element on ehitatud alates
õhuke juhtiva materjali väljundühendustele risti voo suunda. Allutatuna magnetväli, vastab
see väljundpinge on proportsionaalne magnetvälja tugevusega. Väljundpingega on väga väike
(mV ) ja nõuab täiendavaid elektroonika saavutada kasuliku pinge tasanditel . Kui Hall
element on koosselle juurde kuuluv elektroonika , see moodustab Hall effect sensor . Südames
iga mikrolüliti Hall effect de - vice on integreeritud kiip , mis sisaldab Hall element ja signaal
conditioning elektroonika. Kuigi Halli efekti andur on magnetvälja andur, seda saab kasutada
põhimõtteliselt komponendi paljud muud liiki sensorid (praegune, temperatuur rõhul asendis
jne). Halli efektiga andurid saab rakendada mitmesuguseid sensorid . Kui kogus (parameeter)
tuleb tajusin sisaldab või võib sisaldada magnetväli, Hall Andur ülesandeid täitma . Joonis 1-1
näitab plokkskeemtajumis de - vice mis kasutab Hall effect.
Sellisel üldistatud sensoriga, Hall andur tunnetab valdkonnas toodetud magnetiline süsteem.
Magnetiline süsteem reageerib füüsikalise suuruse tajusin (temperatuur, rõhk, asukoht, jne)
läbi sisendi liides. Väljundliides muundab elektrilise signaali Halli anduri signaali, et vastab
taotluse. Neli plokid sisalduvad sensoriga (joonis 1-1) on eksamid m-INED üksikasjalikult
järgmistes peatükkides.
Why use the Hall effect?Vastava tehnoloogiaga sensori kasutamine sõltub rakendusest, milles antud sensor kasutust
leiab. Sensori maksumus, võimekus ja saadavus on peamised parameetrid, mida anduri
valikul jälgida. Antud tehnoloogia omadused ja eelised on näitajad, mida tuleks kaaluda koos
konkreetsete vajadustega.
Halli efektil põhinevate andurite põhiomadused:
• Tahkes olekus andur (puuduvad liikuvad osad);
• Pikk eluiga (3 miljardit operatsiooni pikas klaviatuurimooduli testprogrammis);
• Kiire – võimalik üle 100 kHz;
• Töötab statsionaarse sisendiga (null kiirus);
• Loogikaga ühilduvad sisend ja väljund;
• Lai temperatuuritaluvuse amplituud (-40 kuni 150 ° C);
• Kergesti korratavad funktsioonid.
Halli efekti kasutavad sensoridEt kasutada Halli efektil põhinevaid sensoreid, peab valima eelnevalt kasutatava
magnetsüsteemi ja Halli anduri koos õigete parameetritega. Seejärel integreeritakse anduri
tööks vajalikud komponendid süsteemi, mille tulemusena saavutatakse soovitud süsteem.
MICRO SWITCH Sensing ja Control on välja töötanud mitmeid tooteid, mis on ühendatud
ühtsesse sensor ja magnet süsteemi.
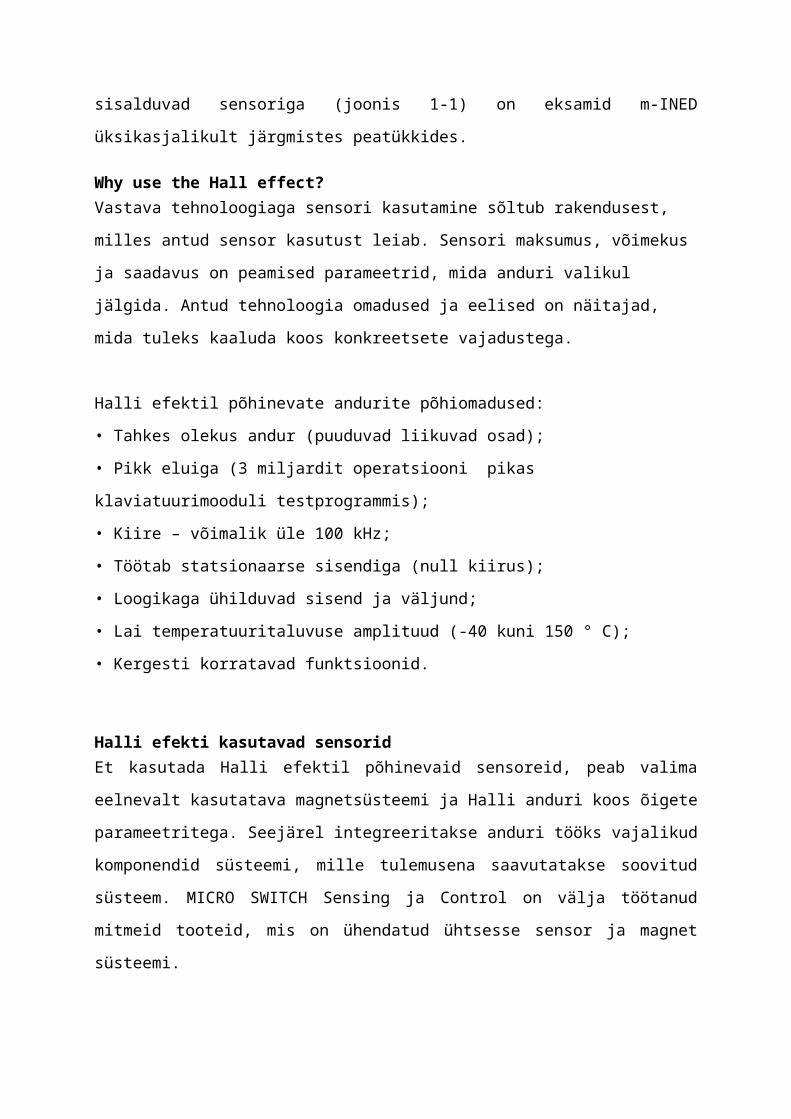
Metallist labadega kontrollitav positsioonitajurAntud andur koosneb magnetist ja digitaalse väljundiga Halli efekti andurist. Mõlemad anduri
oasad on statsionaarselt kinnitatud mittemetallist kesta sisse. Anduri magneti ja Halli effekti
anduri vahel on tühimik, mida mööda võib metallist plaat liikuda. Halli effekti andur
registreerib seejärel plaadi liikumise magnetvälja ees.
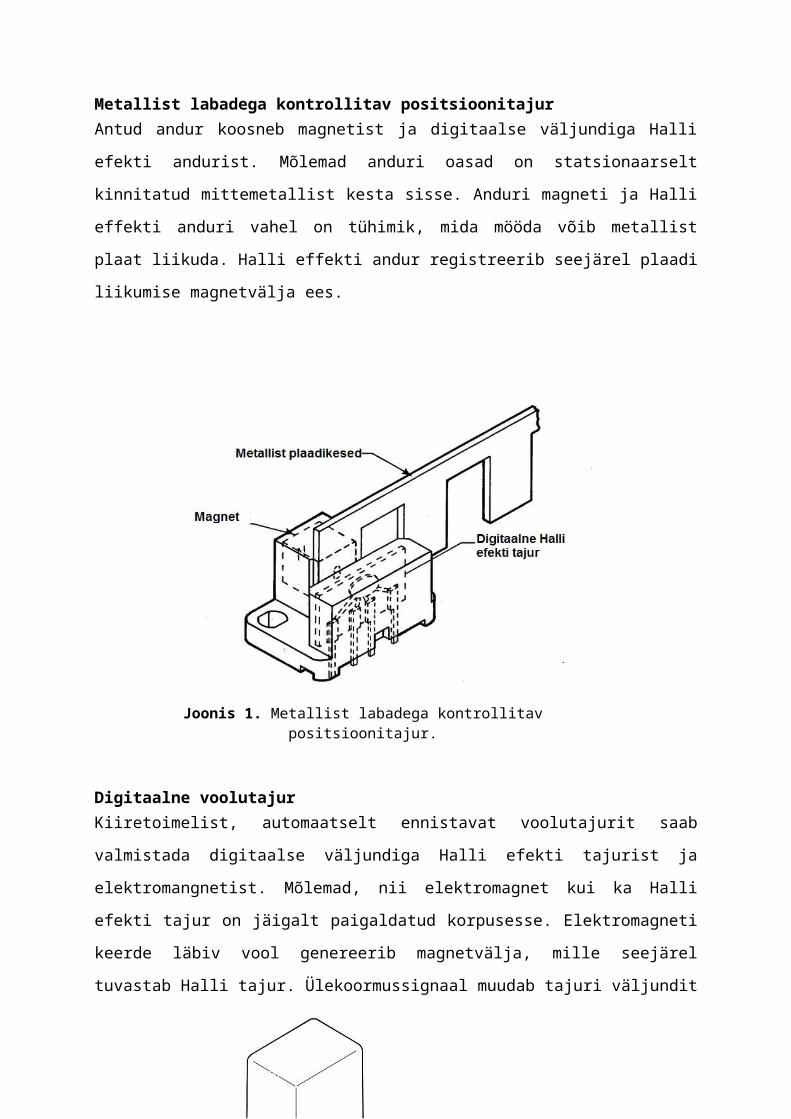
Digitaalne voolutajurKiiretoimelist, automaatselt ennistavat voolutajurit saab valmistada digitaalse väljundiga Halli
efekti tajurist ja elektromangnetist. Mõlemad, nii elektromagnet kui ka Halli efekti tajur on
jäigalt paigaldatud korpusesse. Elektromagneti keerde läbiv vool genereerib magnetvälja,
mille seejärel tuvastab Halli tajur. Ülekoormussignaal muudab tajuri väljundit madalast
kõrgeks või kõrgest madalaks, kui elektromagnetit läbiv vool ületab etteantud väärtuse. Antud
tajurit võib kasutada häirealarmi sisselülitamiseks või voolu otseseks elektrooniliseks
kontrollimiseks.
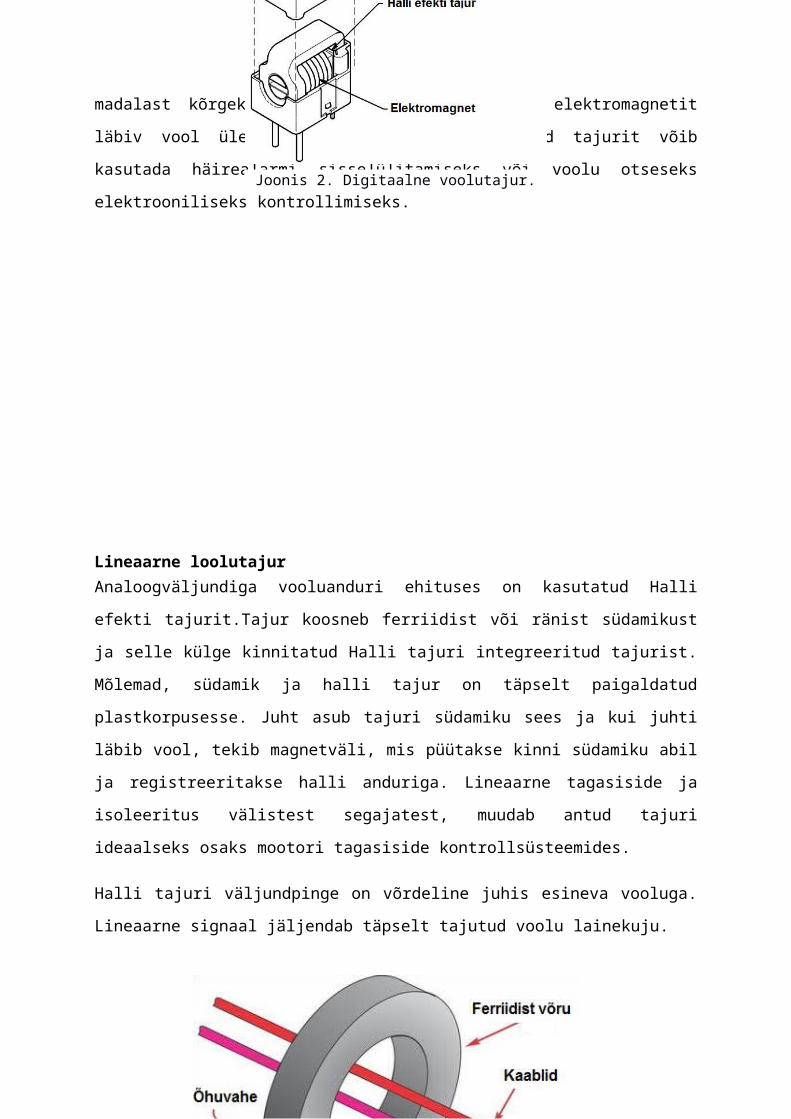
Lineaarne loolutajurAnaloogväljundiga vooluanduri ehituses
on kasutatud Halli efekti tajurit.Tajur koosneb ferriidist või ränist südamikust ja selle külge
kinnitatud Halli tajuri integreeritud tajurist. Mõlemad, südamik ja halli tajur on täpselt
paigaldatud plastkorpusesse. Juht asub tajuri südamiku sees ja kui juhti läbib vool, tekib
Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.Joonis 2. Digitaalne voolutajur.
magnetväli, mis püütakse kinni südamiku abil ja registreeritakse halli anduriga. Lineaarne
tagasiside ja isoleeritus välistest segajatest, muudab antud tajuri ideaalseks osaks mootori
tagasiside kontrollsüsteemides.
Halli tajuri väljundpinge on võrdeline juhis esineva vooluga. Lineaarne signaal jäljendab
täpselt tajutud voolu lainekuju.
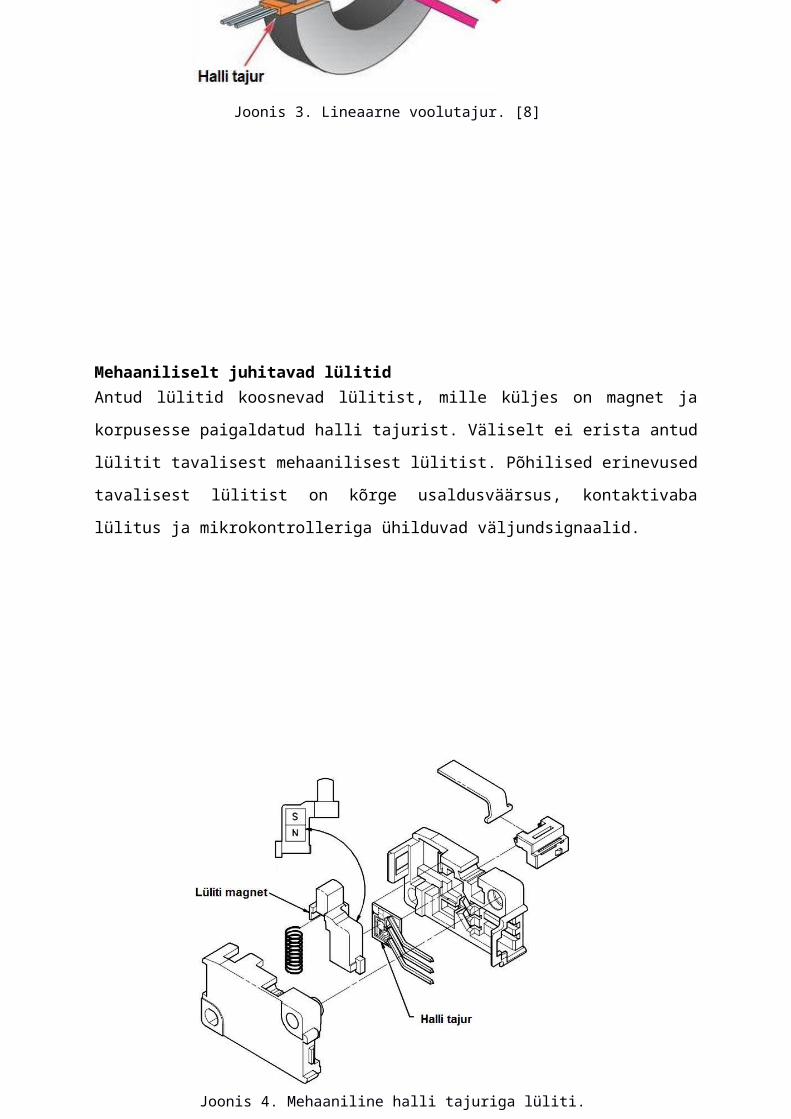
Mehaaniliselt juhitavad lülitidAntud lülitid koosnevad lülitist, mille küljes on magnet ja korpusesse paigaldatud halli
tajurist. Väliselt ei erista antud lülitit tavalisest mehaanilisest lülitist. Põhilised erinevused
tavalisest lülitist on kõrge usaldusväärsus, kontaktivaba lülitus ja mikrokontrolleriga
ühilduvad väljundsignaalid.
Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]Joonis 3. Lineaarne voolutajur. [8]
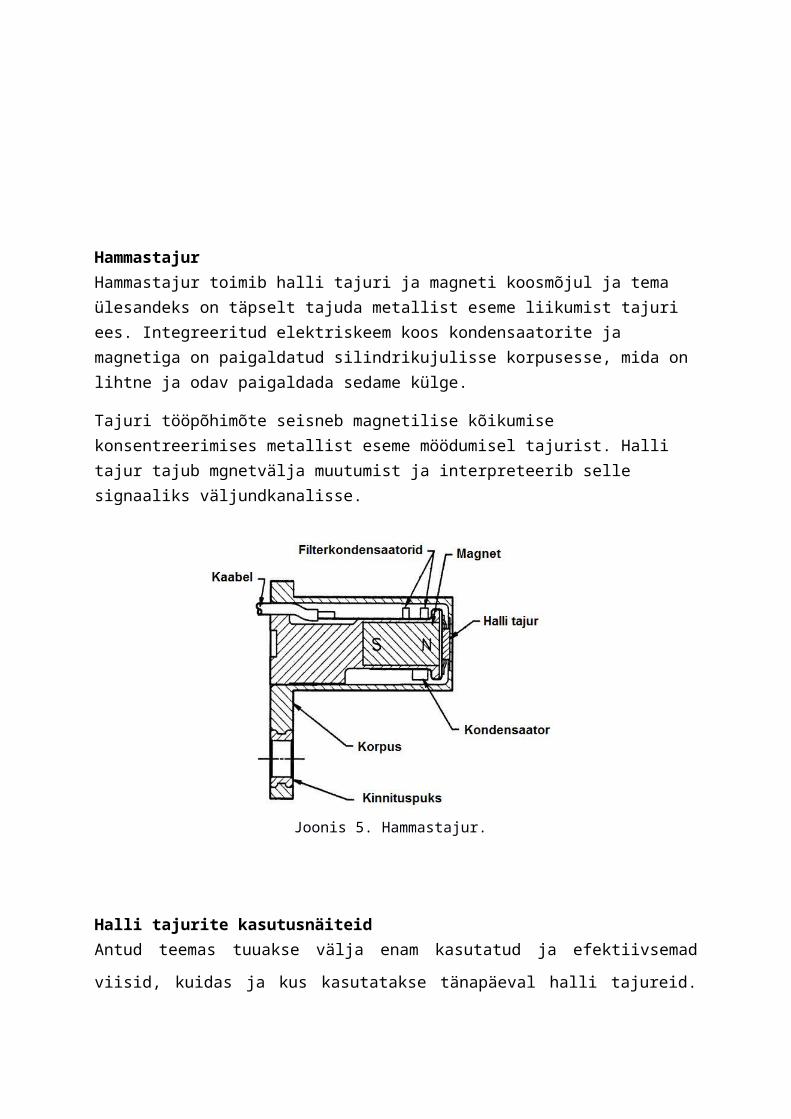
HammastajurHammastajur toimib halli tajuri ja magneti koosmõjul ja tema ülesandeks on täpselt tajuda metallist eseme liikumist tajuri ees. Integreeritud elektriskeem koos kondensaatorite ja magnetiga on paigaldatud silindrikujulisse korpusesse, mida on lihtne ja odav paigaldada sedame külge.
Tajuri tööpõhimõte seisneb magnetilise kõikumise konsentreerimises metallist eseme möödumisel tajurist. Halli tajur tajub mgnetvälja muutumist ja interpreteerib selle signaaliks väljundkanalisse.
Halli tajurite kasutusnäiteidAntud teemas tuuakse välja enam kasutatud ja efektiivsemad viisid, kuidas ja kus kasutatakse
tänapäeval halli tajureid. Kuna reaalsuses kasutatakse sama tüüpi tajureid erinevatel seadmetel
ja tajurilahendustel, on siin välja toodud variandid vaid murdosa tegelikust
kasutusvaldkonnast.
Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.Joonis 5. Hammastajur.
Digitaalse väljundiga tajurite kasutusvaldkonnad:• Sagedus / kiiruse andurid (mootori
juhtimine)
• Ajastus mõõtmine (fotoseadmete)
• Süüte ajastus
• Asukoha andurid (nii madala kui 0,002"
avastamiseks)
• Impulssloendurid (printerid, ajamid)
• Klapi asendianduritest
• Juhtkangi rakendused
• Uste lukusüsteemid
• Elektrivoolu tajumine (mootori
juhtimissüsteemid)
• Ventilaatori labade liikumise tajumine
• Harjadeta alalisvoolumootorid
• Tahhomeeter
• Vooluhulga mõõturid (asendab reed-
lüliteid)
• releed (asendab elektroonilisi ja
mehaanilisi kontakte)
• X / Y & indekseerimislauad
• Lähedusandurid
• Turvaandurid (magnetkaardi või
uksevõtmed)
• Pangandusseadmed (automaatne teller)
• Telekommunikatsiooniseadmed
• Rõhuandurid
• Piiravad lülitid
• Läätse positsiooniandurid
• Paberiandurid
• Testseadmed
• Võlli asendiandurid
• Müügiautomaadid
• Pressimisseadmed
Lineaarse väljundiga tajurite kasutusvaldkonnad:1. Elektrivoolu tajurid
• Ketaste juhtseadmed
• Muutuva sageduega
sajamid
• Mootori kaitsesüsteemid /
indikaatorid
• Toiteplokkide kaitsesüsteemid
2. Positiooni tajurid
• Rõhkmembraanid
• Vooluhulga mõõturid
• Siibri kontrollseadmed
• Harjadeta
alalisvoolumootorid
• Kontaktivabad
Potentsiomeetrid
• Kodeeritud lülitid
• Pingeregulaatorid
• Rauadmetallide detektorid
• Vibratsiooni andurid
• Tahhomeetri
Halli tajuri positiivsed omadused Puudub liikuvate osade omavaheline kontakt, seega ei toimu kulumist.
(Lõpmatu töötsüklite arv);
Kiire töösagedus – üle 100 kHz;
Immuunne mustusele, õhule ja veele (mahtuvuslikud andurid võivad samades
olukordades anda valesignaale);
Võimalik mõõta 0-kiirust;
Lai temperatuuriamplituud;
Kõrge operatsioonide korratavus;
Suurte voolude mõõtmise võimekus.
Halli tajuri negatiivsed omadused Võib saada mõjutatud välistest magnetväljadest;
Suur temperatuuride vahe;
Suur nihkepinge.
Halli efekti tajuri rakendusvõimalusi Voolutajur;
Võimsustajur;
Lähedustajur;
Kiirustajur. [7]
teine - konkreetsetes tingimustes ühe mõõteseadme kasutamise metoodikat ja mõõtetulemuste interpreteerimise kirjeldust. [9]
3. Positsiooni mõõtmine Halli tajuri abilAntud katses on kasutatud halli andurit SS495A, mis on eelnevalt kontrollitud. Nimetatud
andur kuulub Honeywelli SS490 seeriasse. SS940 seeria anduritel on sisendpingega
proportsionaalselt muutuv väljundpinge, mis on määratakse toitepinge abil. Väljundpinge
varieerub proportsionaalselt magnetvälja tugevusele. [9]
Uus sisseehitatud halli efekti integreeritud elektriskeem pakub suuremat stabiilsust
tundlikkuse ja temperatuuri kõikumise osas. Kiibil olev laseri abil lõigatud õhuke filmtakisti
tagab kõrge täpsuse ja temperatuurikompensatsiooni. Quad halli tajuri elemnt aitab vähendada
mehaanilise või termilise stressi poolt tekkida võivat väljundviga. Positiivne
temperatuuritundlikkuse koefitsent aitab kompenseerida odavamate magnetite negatiivset
koefitsenti, mis omakorda võimaldab tugevamat korpust üle laia temperatuurivahemike.
SS495A anduril on tüüpiline magnetilisuse vahemik -67 mT kuni 67 mT (-670 G kuni 670 G).
Reageerimisaeg jääb alla 3 µs-i. Kogu katse vältel on kasutatud ühte püsimagnetit, mis on
valmistatud SmCo-st (Samarium Cobalt), mille magnetiline induktsioon on 0,35 mT koos
telgmise
polarisatsiooniga.
Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.Joonis 6. SS495A halli andur.
Katsetuste käikKatsetuste eesmärgiks on uurida anduri staatilist karakteristikut, kui sõltuvust väljundpinge ja
magneti positsiooni vahel.
Mõõtmised on teostatud magneti mõlemale poolusele. Magnet on fikseeritud plastikust
hoidjasse. Andur on paigaldatud x-y lauale, mille on mikromeetriline reguleerimiskruvi.
Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.Joonis 8. Püsimagneti positsioon anduri suhtes.
Joonis 9. Katse läbiviimiseks ülesseatud katsemehhanism.
KatsetulemusedKatseandmete põhjal võib väita, et anduri tundlikkus on kõige parem lühikestel distantsidel,
kui püsimagnet on asetatud põhjapoolusega anduri suunas. Magneti põhjapoolus seab kauguse
intervallidele piirideks 1-4 mm. Anduril on laiem mõõtepiirkond, kui magnet on paigaldatud
lõunapoolusega anduri suunas. Kuid samas on sellisel kujul tundlikkus märgatavalt
vähenenud. Järeldusena võib välja tuua, et kasutatav mõõtepiirkond on 1-16 mm.
Saadud karakteristikud sõltuvad kasutatvast püsimagnetist. Seetõttu vajabki iga uus anduri ja
magneti kombinatsioon alati kalibreerimist. [9]
Joonis 10. SS495A halli anduri staatilised karakteristikud.
Kasutatud kirjandus 1. http://et.wikipedia.org/wiki/Halli_efekt 2. http://et.wikipedia.org/wiki/Halli_tajur 3. http://novaator.ee/ET/it/menukast_materjalist_leiti_veidralt_kaituvad_osakesed/ 4. http://www.nist.gov/pml/div683/hall.cfm 5. http://www.physics.oregonstate.edu/~tate/TateLabWiki/lib/exe/fetch.php?
media=hall:keithley021711_halleffectmeasurements.pdf6. http://dangerousprototypes.com/2012/01/27/interfacing-a-pic-microcontroller-with-
the-acs712-hall-effect-current-sensor/7. http://sensors-actuators-info.blogspot.com/2009/08/hall-effect-sensor.html 8. http://archive.siliconchip.com.au/static/images/articles/i305/30551_15lo.jpg 9. http://pubs.sciepub.com/ajme/1/7/16/ 10. Hoeneywell, MICRO SWITCH Sensing and CONTROL – Hall Effect Sensing and
Application, 126 lk. Kättesaadav: (12.05.2014)11. http://www.horisont.ee/arhiiv_1996_1999/1998/08/elementaarne.html
























![[Luật chơi] Halli galli](https://img.pdfslide.tips/doc/110x75/588477921a28ab5e248b6035/luat-choi-halli-galli.jpg)


