Embed Size (px)
Citation preview
1 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
DESCRIPCIÓN DEL MOVIMIENTO 1) Conceptos basicos
• Definir distancia recorrida, posición y cambio de posición. • Definir vectores posicion, velocidad y aceleración en movimientos en 1 dimensión. • Diferenciar velocidad media y aceleración media de velocidad y aceleración
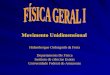
instantánea. Distancia Recorrida y Cambio de Posición Considere la situación ilustrada en la figura 1.Un automovilista debe pasar por una cuesta para llegar a su destino. Parte en la hostería. Su acompañante toma nota de su recorrido, anotando la hora y la distancia recorrida, leída directamente del “cuentakilómetros” del auto.
Hora Referencia Kilometraje
10:05 Salida de la Hostería 44080,3
10:23 Paso frente al servicentro 44106,8
10:31 Frente al cedro, regreso por escasez de bencina. 44115,1
10:38 Llegada al servicentro 44123,4
10:51 Partida hacia la cuesta 44123,4
11:00 Nuevamente frente al cedro 44131,7
11:43 Llegada a la cima 44165,5
A partir de esos datos construyen la siguiente tabla
Hora t[min] ∆∆∆∆t[min] Kilometraje d [km] ∆∆∆∆d[Km] vmedia[Km/h]
10:05 0 44080,3 0
18 26,5 88,3
10:23 18 44106,8 26,5
8 8,3 62,3
10:31 26 44115,1 34,8
7 8,3 71,1
10:38 33 44123,4 43,1
13 0 0,0
10:51 46 44123,4 43,1
9 8,3 55,3
11:00 55 44131,7 51,4
43 33,8 47,2
11:43 98 44165,5 85,2
Donde
Figura 1) Ilustración del problema
2 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
• t: tiempo medido a partir del instante de salida de la hostería.
• ∆t: intervalo de tiempo transcurrido entre dos referencias sucesivas.
• d: distancia recorrida por el automóvil desde que salió de la hostería.
• ∆d: distancia recorrida entre dos referencias sucesivas.
• vmedia= ∆d / ∆t: rapidez media entre dos referencias sucesivas.
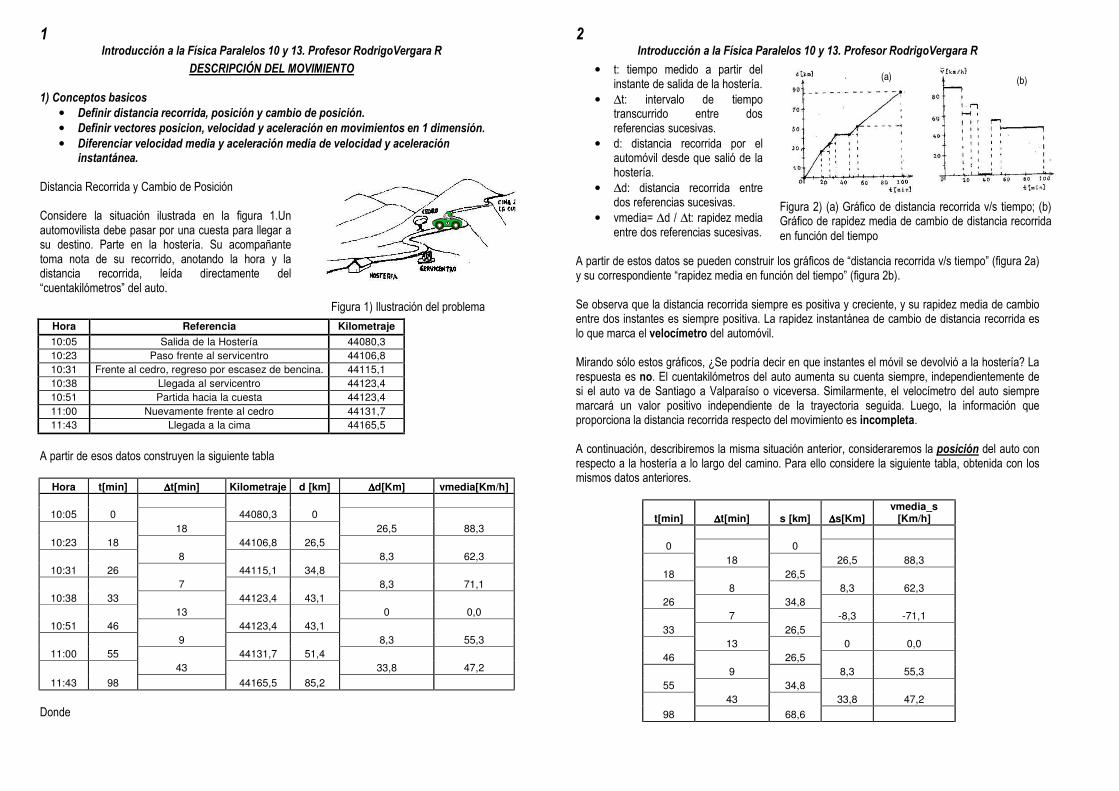
A partir de estos datos se pueden construir los gráficos de “distancia recorrida v/s tiempo” (figura 2a) y su correspondiente “rapidez media en función del tiempo” (figura 2b). Se observa que la distancia recorrida siempre es positiva y creciente, y su rapidez media de cambio entre dos instantes es siempre positiva. La rapidez instantánea de cambio de distancia recorrida es lo que marca el velocímetro del automóvil. Mirando sólo estos gráficos, ¿Se podría decir en que instantes el móvil se devolvió a la hostería? La respuesta es no. El cuentakilómetros del auto aumenta su cuenta siempre, independientemente de si el auto va de Santiago a Valparaíso o viceversa. Similarmente, el velocímetro del auto siempre marcará un valor positivo independiente de la trayectoria seguida. Luego, la información que proporciona la distancia recorrida respecto del movimiento es incompleta. A continuación, describiremos la misma situación anterior, consideraremos la posición del auto con respecto a la hostería a lo largo del camino. Para ello considere la siguiente tabla, obtenida con los mismos datos anteriores.
t[min] ∆∆∆∆t[min] s [km] ∆∆∆∆s[Km] vmedia_s
[Km/h]
0 0
18 26,5 88,3
18 26,5
8 8,3 62,3
26 34,8
7 -8,3 -71,1
33 26,5
13 0 0,0
46 26,5
9 8,3 55,3
55 34,8
43 33,8 47,2
98 68,6
(a) (b)
Figura 2) (a) Gráfico de distancia recorrida v/s tiempo; (b) Gráfico de rapidez media de cambio de distancia recorrida en función del tiempo
3 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Donde • s: distancia del auto a la hostería (a lo largo del camino). • ∆s: Cambio de posición entre dos referencias sucesivas. • Vmedia_s= ∆s / ∆t: rapidez media correspondiente.
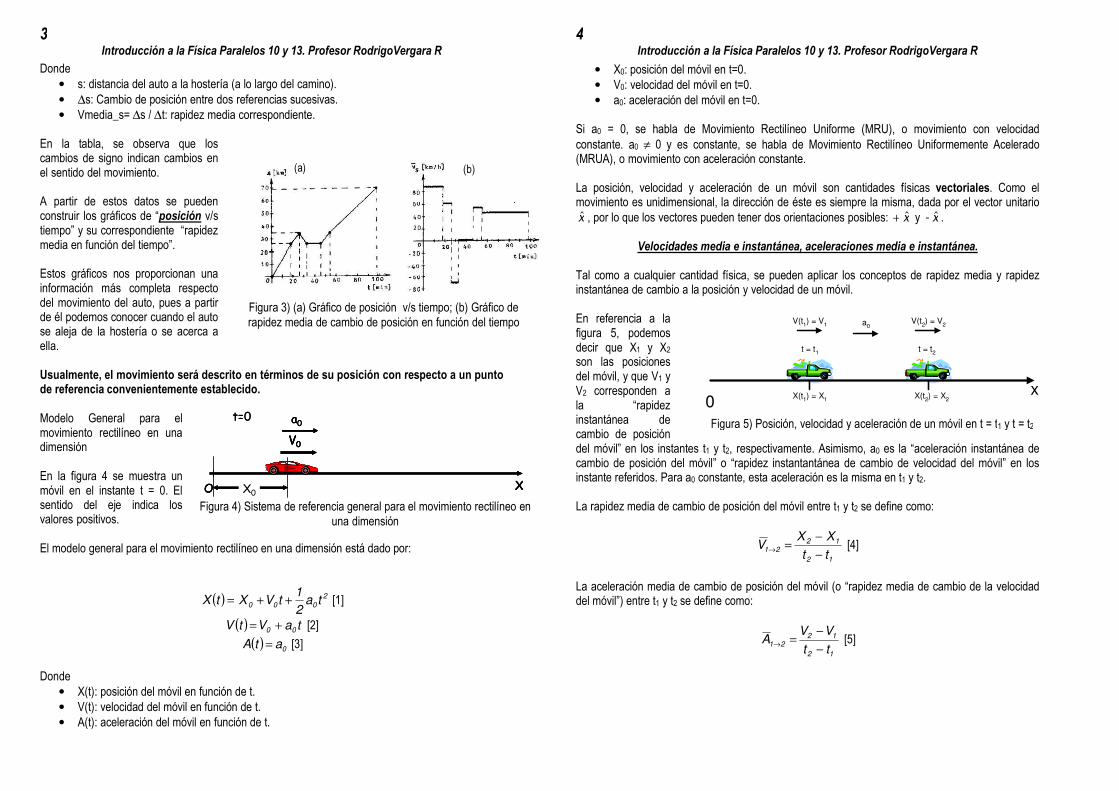
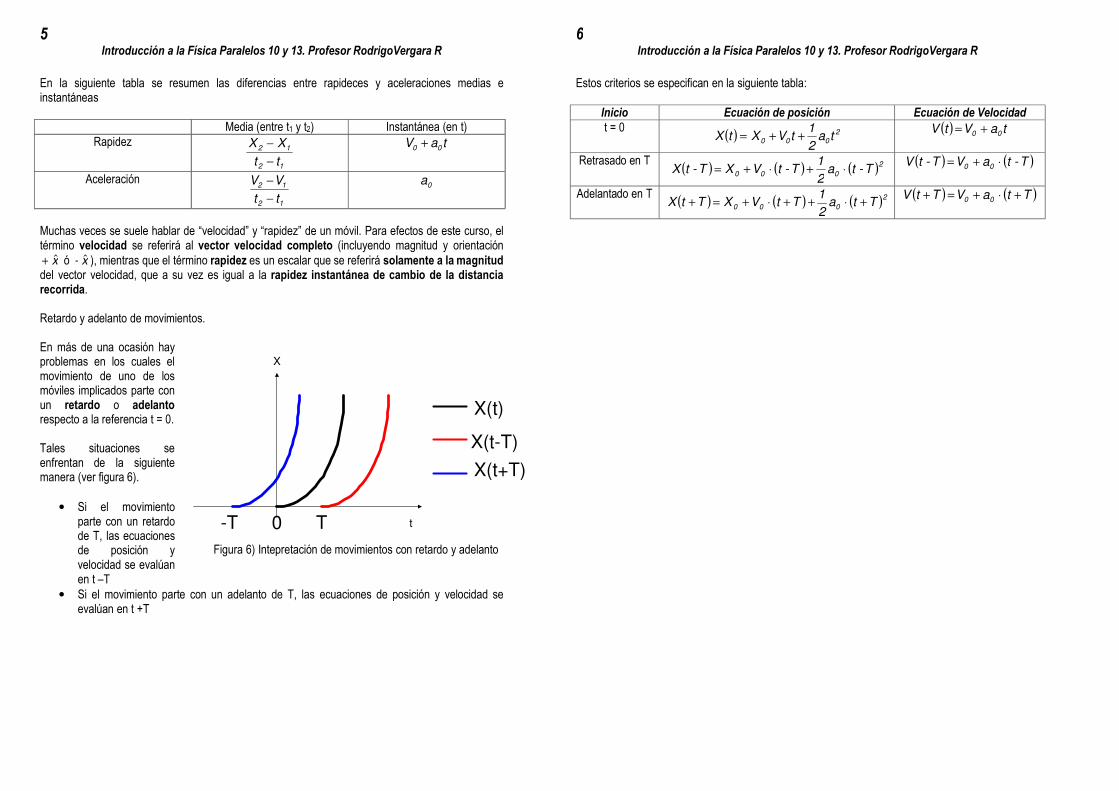
En la tabla, se observa que los cambios de signo indican cambios en el sentido del movimiento. A partir de estos datos se pueden construir los gráficos de “posición v/s tiempo” y su correspondiente “rapidez media en función del tiempo”. Estos gráficos nos proporcionan una información más completa respecto del movimiento del auto, pues a partir de él podemos conocer cuando el auto se aleja de la hostería o se acerca a ella. Usualmente, el movimiento será descrito en términos de su posición con respecto a un punto de referencia convenientemente establecido. Modelo General para el movimiento rectilíneo en una dimensión En la figura 4 se muestra un móvil en el instante t = 0. El sentido del eje indica los valores positivos. El modelo general para el movimiento rectilíneo en una dimensión está dado por:
( ) 2
000 ta2
1tVXtX ++= [1]
( ) taVtV 00 += [2]
( ) 0atA = [3]
Donde
• X(t): posición del móvil en función de t. • V(t): velocidad del móvil en función de t. • A(t): aceleración del móvil en función de t.
(a) (b)
Figura 3) (a) Gráfico de posición v/s tiempo; (b) Gráfico de rapidez media de cambio de posición en función del tiempo
O
a0
X0
V0
X
t=0
O
a0
X0
V0
XO
a0
X0
V0
XX0
V0
X
t=0
Figura 4) Sistema de referencia general para el movimiento rectilíneo en
una dimensión
4 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
• X0: posición del móvil en t=0. • V0: velocidad del móvil en t=0. • a0: aceleración del móvil en t=0.
Si a0 = 0, se habla de Movimiento Rectilíneo Uniforme (MRU), o movimiento con velocidad constante. a0 ≠ 0 y es constante, se habla de Movimiento Rectilíneo Uniformemente Acelerado (MRUA), o movimiento con aceleración constante. La posición, velocidad y aceleración de un móvil son cantidades físicas vectoriales. Como el movimiento es unidimensional, la dirección de éste es siempre la misma, dada por el vector unitario x̂ , por lo que los vectores pueden tener dos orientaciones posibles: x̂+ y x- ˆ .
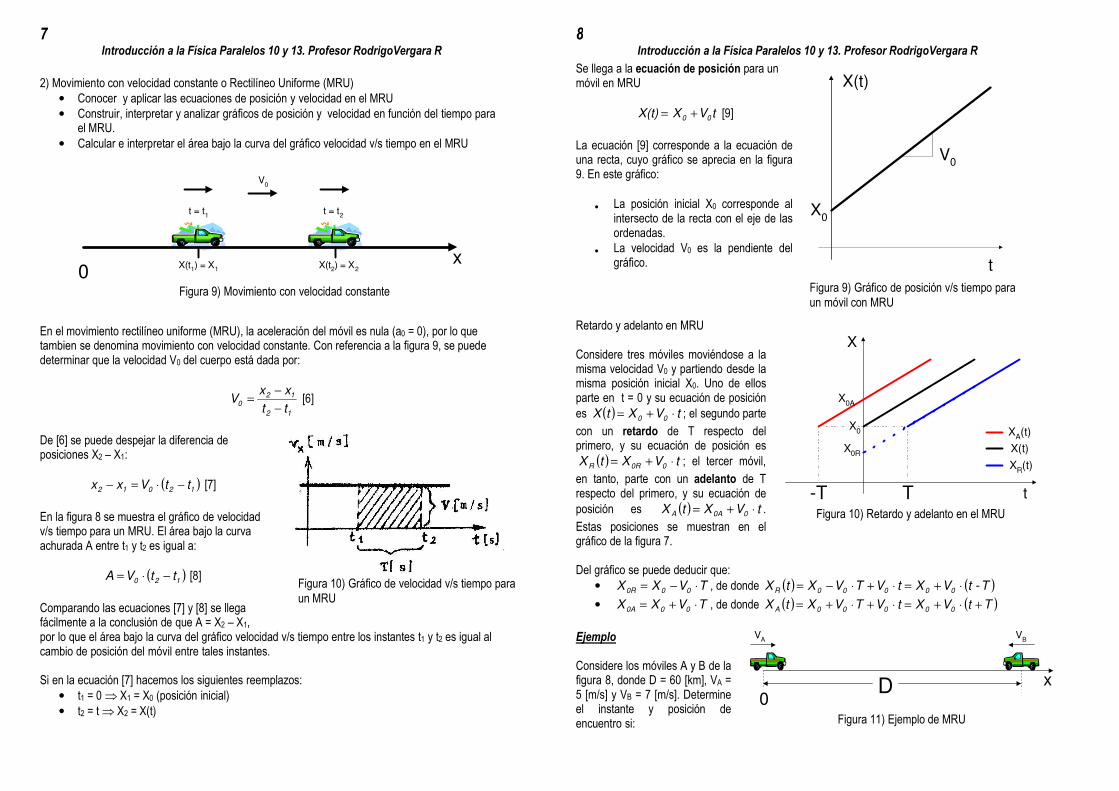
Velocidades media e instantánea, aceleraciones media e instantánea. Tal como a cualquier cantidad física, se pueden aplicar los conceptos de rapidez media y rapidez instantánea de cambio a la posición y velocidad de un móvil. En referencia a la figura 5, podemos decir que X1 y X2 son las posiciones del móvil, y que V1 y V2 corresponden a la “rapidez instantánea de cambio de posición del móvil” en los instantes t1 y t2, respectivamente. Asimismo, a0 es la “aceleración instantánea de cambio de posición del móvil” o “rapidez instantantánea de cambio de velocidad del móvil” en los instante referidos. Para a0 constante, esta aceleración es la misma en t1 y t2. La rapidez media de cambio de posición del móvil entre t1 y t2 se define como:
12
1221
tt
XXV
−
−=→ [4]
La aceleración media de cambio de posición del móvil (o “rapidez media de cambio de la velocidad del móvil”) entre t1 y t2 se define como:
12
1221
tt
VVA
−
−=
→ [5]
0x
t = t1
t = t2
V(t1) = V
1V(t
2) = V
2
X(t1) = X
1X(t
2) = X
2
a0
Figura 5) Posición, velocidad y aceleración de un móvil en t = t1 y t = t2
5 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
En la siguiente tabla se resumen las diferencias entre rapideces y aceleraciones medias e instantáneas
Media (entre t1 y t2) Instantánea (en t) Rapidez
12
12
tt
XX
−
−
taV 00 +
Aceleración
12
12
tt
VV
−
− 0a
Muchas veces se suele hablar de “velocidad” y “rapidez” de un móvil. Para efectos de este curso, el término velocidad se referirá al vector velocidad completo (incluyendo magnitud y orientación
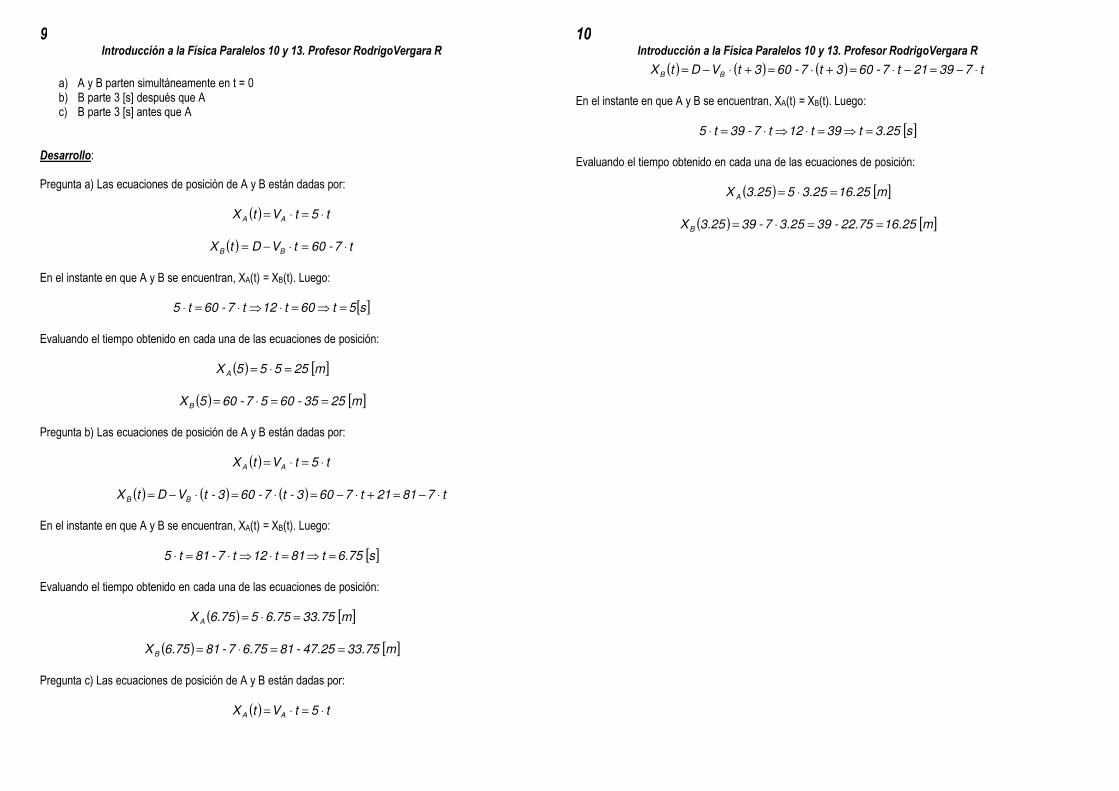
x̂+ ó x- ˆ ), mientras que el término rapidez es un escalar que se referirá solamente a la magnitud del vector velocidad, que a su vez es igual a la rapidez instantánea de cambio de la distancia recorrida. Retardo y adelanto de movimientos. En más de una ocasión hay problemas en los cuales el movimiento de uno de los móviles implicados parte con un retardo o adelanto respecto a la referencia t = 0. Tales situaciones se enfrentan de la siguiente manera (ver figura 6).
• Si el movimiento parte con un retardo de T, las ecuaciones de posición y velocidad se evalúan en t –T
• Si el movimiento parte con un adelanto de T, las ecuaciones de posición y velocidad se evalúan en t +T
X
t
X(t)
T-T 0
X(t-T)
X(t+T)
Figura 6) Intepretación de movimientos con retardo y adelanto
6 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Estos criterios se especifican en la siguiente tabla:
Inicio Ecuación de posición Ecuación de Velocidad t = 0
( ) 2000 ta
2
1tVXtX ++=
( ) taVtV 00 +=
Retrasado en T ( ) ( ) ( )2
000 T-ta2
1T-tVXT-tX ⋅+⋅+=
( ) ( )T-taVT-tV 00 ⋅+=
Adelantado en T ( ) ( ) ( )2
000 Tta2
1TtVXTtX +⋅++⋅+=+
( ) ( )TtaVTtV 00 +⋅+=+
7 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
2) Movimiento con velocidad constante o Rectilíneo Uniforme (MRU)
• Conocer y aplicar las ecuaciones de posición y velocidad en el MRU • Construir, interpretar y analizar gráficos de posición y velocidad en función del tiempo para
el MRU. • Calcular e interpretar el área bajo la curva del gráfico velocidad v/s tiempo en el MRU
En el movimiento rectilíneo uniforme (MRU), la aceleración del móvil es nula (a0 = 0), por lo que tambien se denomina movimiento con velocidad constante. Con referencia a la figura 9, se puede determinar que la velocidad V0 del cuerpo está dada por:
12
120
tt
xxV
−
−= [6]
De [6] se puede despejar la diferencia de posiciones X2 – X1:
( )12012 ttVxx −⋅=− [7]
En la figura 8 se muestra el gráfico de velocidad v/s tiempo para un MRU. El área bajo la curva achurada A entre t1 y t2 es igual a:
( )120 ttVA −⋅= [8]
Comparando las ecuaciones [7] y [8] se llega fácilmente a la conclusión de que A = X2 – X1, por lo que el área bajo la curva del gráfico velocidad v/s tiempo entre los instantes t1 y t2 es igual al cambio de posición del móvil entre tales instantes. Si en la ecuación [7] hacemos los siguientes reemplazos:
• t1 = 0 ⇒ X1 = X0 (posición inicial) • t2 = t ⇒ X2 = X(t)
0x
t = t1
t = t2
X(t1) = X1 X(t2) = X2
V0
Figura 9) Movimiento con velocidad constante
Figura 10) Gráfico de velocidad v/s tiempo para un MRU
8 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Se llega a la ecuación de posición para un móvil en MRU
tVXX(t) 00 += [9]
La ecuación [9] corresponde a la ecuación de una recta, cuyo gráfico se aprecia en la figura 9. En este gráfico:
• La posición inicial X0 corresponde al intersecto de la recta con el eje de las ordenadas.
• La velocidad V0 es la pendiente del gráfico.
Retardo y adelanto en MRU Considere tres móviles moviéndose a la misma velocidad V0 y partiendo desde la misma posición inicial X0. Uno de ellos parte en t = 0 y su ecuación de posición es ( ) tVXtX 00 ⋅+= ; el segundo parte
con un retardo de T respecto del primero, y su ecuación de posición es
( ) tVXtX 00RR ⋅+= ; el tercer móvil,
en tanto, parte con un adelanto de T respecto del primero, y su ecuación de posición es ( ) tVXtX 00AA ⋅+= .
Estas posiciones se muestran en el gráfico de la figura 7. Del gráfico se puede deducir que:
• TVXX 000R ⋅−= , de donde ( ) ( )T-tVXtVTVXtX 00000R ⋅+=⋅+⋅−=
• TVXX 000A ⋅+= , de donde ( ) ( )TtVXtVTVXtX 00000A +⋅+=⋅+⋅+=
Ejemplo Considere los móviles A y B de la figura 8, donde D = 60 [km], VA = 5 [m/s] y VB = 7 [m/s]. Determine el instante y posición de encuentro si:
X0
X(t)
t
V0
Figura 9) Gráfico de posición v/s tiempo para un móvil con MRU
X
tT-T
X0
X0R
X0A
XA(t)
X(t)
XR(t)
Figura 10) Retardo y adelanto en el MRU
VA
VB
D0
x
Figura 11) Ejemplo de MRU
9 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
a) A y B parten simultáneamente en t = 0 b) B parte 3 [s] después que A c) B parte 3 [s] antes que A
Desarrollo: Pregunta a) Las ecuaciones de posición de A y B están dadas por:
( ) t5tVtX AA ⋅=⋅=
( ) t7-60tVDtX BB ⋅=⋅−= En el instante en que A y B se encuentran, XA(t) = XB(t). Luego:
[ ]s5t60t12t7-60t5 =⇒=⋅⇒⋅=⋅ Evaluando el tiempo obtenido en cada una de las ecuaciones de posición:
( ) [ ]m 25555X A =⋅=
( ) [ ]m 2535-6057-605XB ==⋅=
Pregunta b) Las ecuaciones de posición de A y B están dadas por:
( ) t5tVtX AA ⋅=⋅=
( ) ( ) ( ) t78121t7603-t7-603-tVDtX BB ⋅−=+⋅−=⋅=⋅−= En el instante en que A y B se encuentran, XA(t) = XB(t). Luego:
[ ]s 6.75t81t12t7-81t5 =⇒=⋅⇒⋅=⋅ Evaluando el tiempo obtenido en cada una de las ecuaciones de posición:
( ) [ ]m 33.756.7556.75X A =⋅=
( ) [ ]m 33.7547.25-816.757-816.75X B ==⋅=
Pregunta c) Las ecuaciones de posición de A y B están dadas por:
( ) t5tVtX AA ⋅=⋅=
10 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
( ) ( ) ( ) t73921t7-603t7-603tVDtX BB ⋅−=−⋅=+⋅=+⋅−= En el instante en que A y B se encuentran, XA(t) = XB(t). Luego:
[ ]s 3.25t39t12t7-39t5 =⇒=⋅⇒⋅=⋅ Evaluando el tiempo obtenido en cada una de las ecuaciones de posición:
( ) [ ]m 16.253.2553.25X A =⋅=
( ) [ ]m 16.2522.75-393.257-393.25XB ==⋅=
11 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
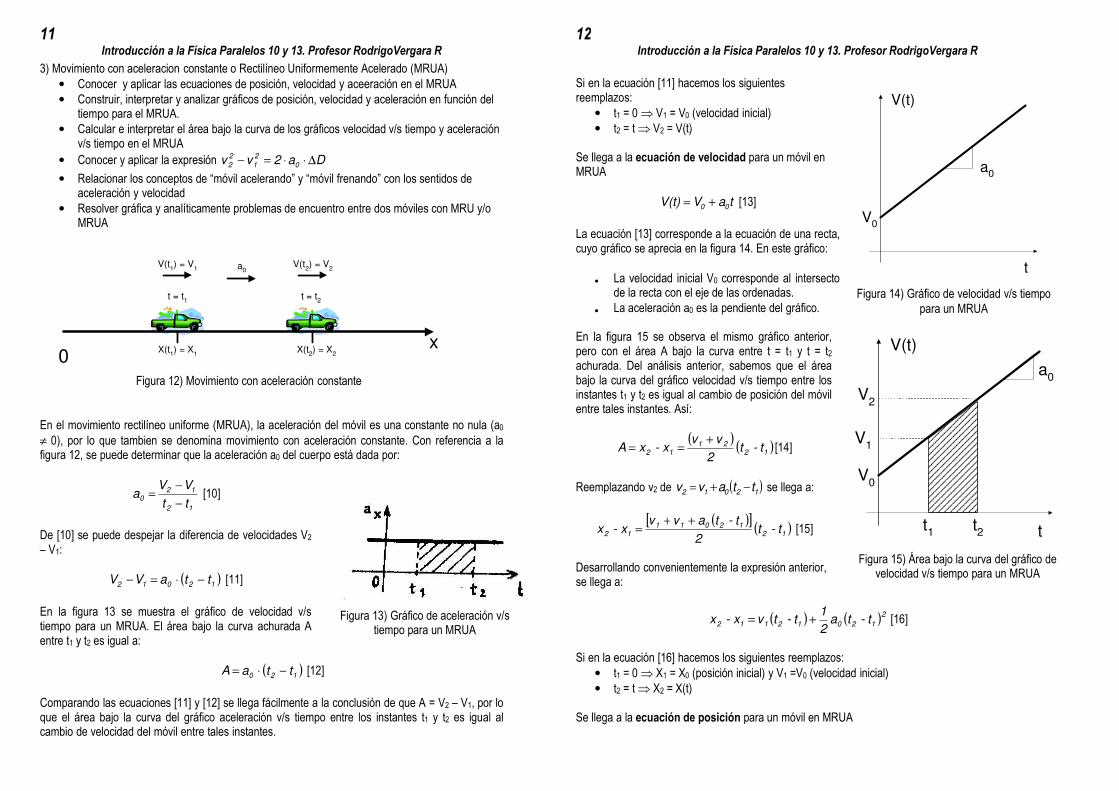
3) Movimiento con aceleracion constante o Rectilíneo Uniformemente Acelerado (MRUA) • Conocer y aplicar las ecuaciones de posición, velocidad y aceeración en el MRUA • Construir, interpretar y analizar gráficos de posición, velocidad y aceleración en función del
tiempo para el MRUA. • Calcular e interpretar el área bajo la curva de los gráficos velocidad v/s tiempo y aceleración
v/s tiempo en el MRUA • Conocer y aplicar la expresión Da2vv 0
2
1
2
2 ∆⋅⋅=−
• Relacionar los conceptos de “móvil acelerando” y “móvil frenando” con los sentidos de aceleración y velocidad
• Resolver gráfica y analíticamente problemas de encuentro entre dos móviles con MRU y/o MRUA
En el movimiento rectilíneo uniforme (MRUA), la aceleración del móvil es una constante no nula (a0 ≠ 0), por lo que tambien se denomina movimiento con aceleración constante. Con referencia a la figura 12, se puede determinar que la aceleración a0 del cuerpo está dada por:
12
120
tt
VVa
−
−= [10]
De [10] se puede despejar la diferencia de velocidades V2 – V1:
( )12012 ttaVV −⋅=− [11]
En la figura 13 se muestra el gráfico de velocidad v/s tiempo para un MRUA. El área bajo la curva achurada A entre t1 y t2 es igual a:
( )120 ttaA −⋅= [12]
Comparando las ecuaciones [11] y [12] se llega fácilmente a la conclusión de que A = V2 – V1, por lo que el área bajo la curva del gráfico aceleración v/s tiempo entre los instantes t1 y t2 es igual al cambio de velocidad del móvil entre tales instantes.
0x
t = t1
t = t2
V(t1) = V
1V(t
2) = V
2
X(t1) = X
1X(t
2) = X
2
a0
Figura 12) Movimiento con aceleración constante
Figura 13) Gráfico de aceleración v/s tiempo para un MRUA
12 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
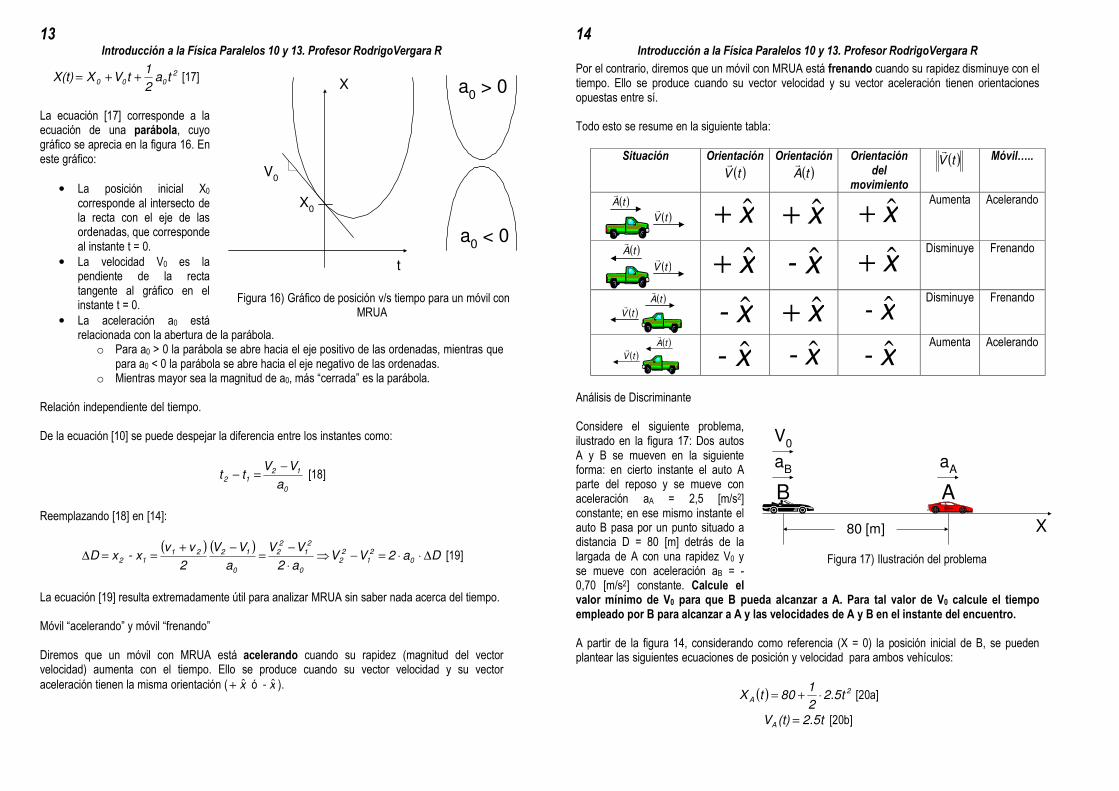
Si en la ecuación [11] hacemos los siguientes reemplazos:
• t1 = 0 ⇒ V1 = V0 (velocidad inicial) • t2 = t ⇒ V2 = V(t)
Se llega a la ecuación de velocidad para un móvil en MRUA
taVV(t) 00 += [13]
La ecuación [13] corresponde a la ecuación de una recta, cuyo gráfico se aprecia en la figura 14. En este gráfico:
• La velocidad inicial V0 corresponde al intersecto de la recta con el eje de las ordenadas.
• La aceleración a0 es la pendiente del gráfico. En la figura 15 se observa el mismo gráfico anterior, pero con el área A bajo la curva entre t = t1 y t = t2 achurada. Del análisis anterior, sabemos que el área bajo la curva del gráfico velocidad v/s tiempo entre los instantes t1 y t2 es igual al cambio de posición del móvil entre tales instantes. Así:
( )( )12
2112 t-t
2
vvx-xA
+== [14]
Reemplazando v2 de ( )12012 ttavv −+= se llega a:
( )[ ]
( )1212011
12 t-t2
t-tavvx-x
++= [15]
Desarrollando convenientemente la expresión anterior, se llega a:
( ) ( )2
12012112 t-ta2
1t-tvx-x += [16]
Si en la ecuación [16] hacemos los siguientes reemplazos:
• t1 = 0 ⇒ X1 = X0 (posición inicial) y V1 =V0 (velocidad inicial) • t2 = t ⇒ X2 = X(t)
Se llega a la ecuación de posición para un móvil en MRUA
V0
V(t)
t
a0
Figura 14) Gráfico de velocidad v/s tiempo
para un MRUA
t
V0
V(t)
a0
V1
V2
t1
t2
Figura 15) Área bajo la curva del gráfico de
velocidad v/s tiempo para un MRUA
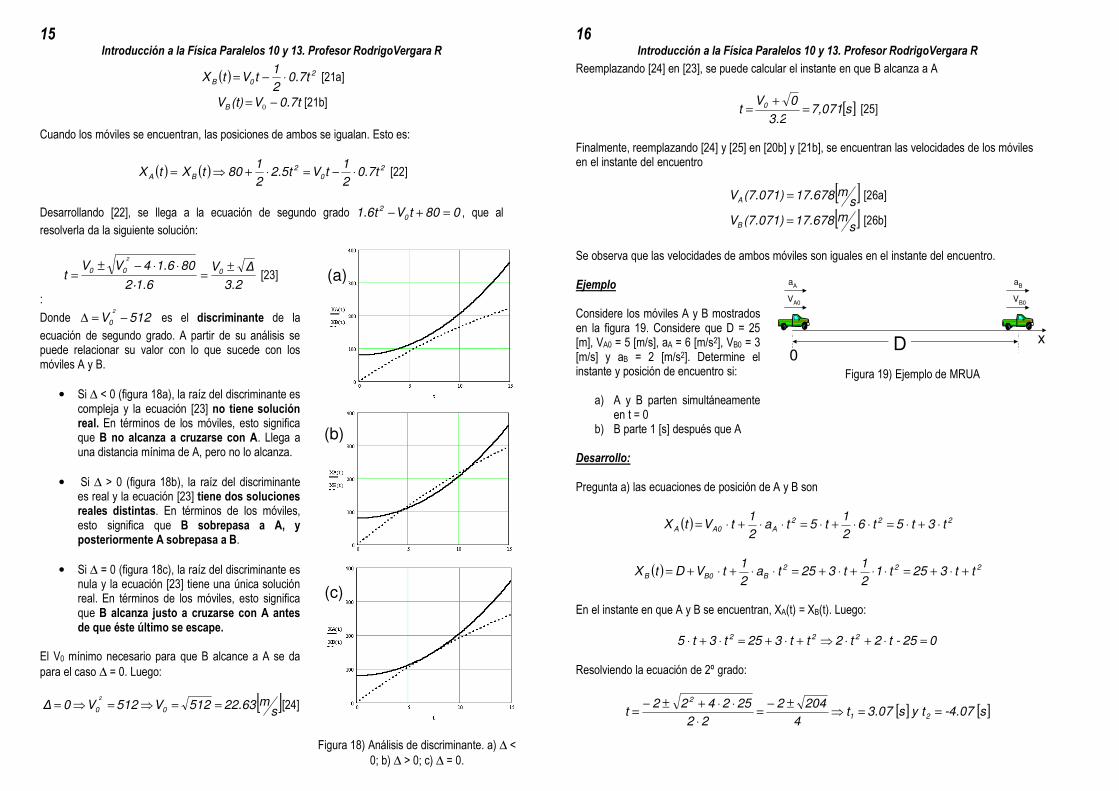
13 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
2000 ta
2
1tVXX(t) ++= [17]
La ecuación [17] corresponde a la ecuación de una parábola, cuyo gráfico se aprecia en la figura 16. En este gráfico:
• La posición inicial X0 corresponde al intersecto de la recta con el eje de las ordenadas, que corresponde al instante t = 0.
• La velocidad V0 es la pendiente de la recta tangente al gráfico en el instante t = 0.
• La aceleración a0 está relacionada con la abertura de la parábola.
o Para a0 > 0 la parábola se abre hacia el eje positivo de las ordenadas, mientras que para a0 < 0 la parábola se abre hacia el eje negativo de las ordenadas.
o Mientras mayor sea la magnitud de a0, más “cerrada” es la parábola. Relación independiente del tiempo. De la ecuación [10] se puede despejar la diferencia entre los instantes como:
0
1212
a
VVtt
−=− [18]
Reemplazando [18] en [14]:
( ) ( )Da2VV
a2
VV
a
VV
2
vvx-xD 0
21
22
0
21
22
0
122112 ∆⋅⋅=−⇒
⋅
−=
−+==∆ [19]
La ecuación [19] resulta extremadamente útil para analizar MRUA sin saber nada acerca del tiempo. Móvil “acelerando” y móvil “frenando” Diremos que un móvil con MRUA está acelerando cuando su rapidez (magnitud del vector velocidad) aumenta con el tiempo. Ello se produce cuando su vector velocidad y su vector aceleración tienen la misma orientación ( x̂+ ó x- ˆ ).
X
t
X0
V0
a0 > 0
a0 < 0
Figura 16) Gráfico de posición v/s tiempo para un móvil con MRUA
14 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Por el contrario, diremos que un móvil con MRUA está frenando cuando su rapidez disminuye con el tiempo. Ello se produce cuando su vector velocidad y su vector aceleración tienen orientaciones opuestas entre sí. Todo esto se resume en la siguiente tabla:
Situación Orientación ( )tV�
Orientación
( )tA�
Orientación
del movimiento
( )tV�
Móvil…..
( )tV�
( )tA�
x̂+ x̂+ x̂+
Aumenta Acelerando
( )tV�
( )tA�
x̂+ x- ˆ
x̂+
Disminuye Frenando
( )tV�
( )tA�
x- ˆ
x̂+ x- ˆ
Disminuye Frenando
( )tV�
( )tA�
x- ˆ x- ˆ x- ˆ
Aumenta Acelerando
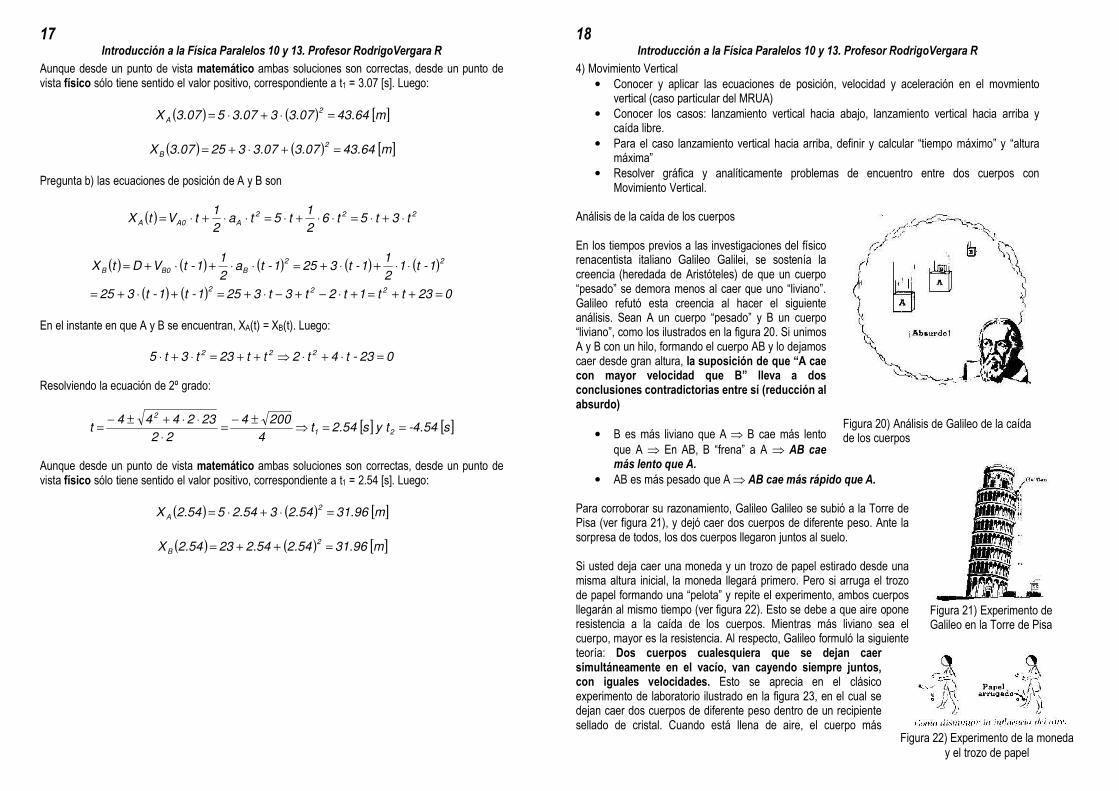
Análisis de Discriminante Considere el siguiente problema, ilustrado en la figura 17: Dos autos A y B se mueven en la siguiente forma: en cierto instante el auto A parte del reposo y se mueve con aceleración aA = 2,5 [m/s2] constante; en ese mismo instante el auto B pasa por un punto situado a distancia D = 80 [m] detrás de la largada de A con una rapidez V0 y se mueve con aceleración aB = -0,70 [m/s2] constante. Calcule el valor mínimo de V0 para que B pueda alcanzar a A. Para tal valor de V0 calcule el tiempo empleado por B para alcanzar a A y las velocidades de A y B en el instante del encuentro. A partir de la figura 14, considerando como referencia (X = 0) la posición inicial de B, se pueden plantear las siguientes ecuaciones de posición y velocidad para ambos vehículos:
( ) 2A 2.5t
2
180tX ⋅+= [20a]
2.5t(t)VA = [20b]
AB
80 [m] X
aA
aB
V0
Figura 17) Ilustración del problema
15 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
( ) 20B 0.7t
2
1tVtX ⋅−= [21a]
0.7tV(t)VB −= 0 [21b]
Cuando los móviles se encuentran, las posiciones de ambos se igualan. Esto es:
( ) ( ) 20
2BA 0.7t
2
1tV2.5t
2
180tXtX ⋅−=⋅+⇒= [22]
Desarrollando [22], se llega a la ecuación de segundo grado 080tV1.6t 0
2=+− , que al
resolverla da la siguiente solución:
3.2
∆V
2·1.6
801.64VVt 000
2
±=
⋅⋅−±= [23]
:
Donde 512V2
0 −=∆ es el discriminante de la
ecuación de segundo grado. A partir de su análisis se puede relacionar su valor con lo que sucede con los móviles A y B.
• Si ∆ < 0 (figura 18a), la raíz del discriminante es compleja y la ecuación [23] no tiene solución real. En términos de los móviles, esto significa que B no alcanza a cruzarse con A. Llega a una distancia mínima de A, pero no lo alcanza.
• Si ∆ > 0 (figura 18b), la raíz del discriminante
es real y la ecuación [23] tiene dos soluciones reales distintas. En términos de los móviles, esto significa que B sobrepasa a A, y posteriormente A sobrepasa a B.
• Si ∆ = 0 (figura 18c), la raíz del discriminante es
nula y la ecuación [23] tiene una única solución real. En términos de los móviles, esto significa que B alcanza justo a cruzarse con A antes de que éste último se escape.
El V0 mínimo necesario para que B alcance a A se da para el caso ∆ = 0. Luego:
[ ]s
m22.63512V512V0∆ 00
2
==⇒=⇒= [24]
(a)
(b)
(c)
Figura 18) Análisis de discriminante. a) ∆ <
0; b) ∆ > 0; c) ∆ = 0.
16 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Reemplazando [24] en [23], se puede calcular el instante en que B alcanza a A
[ ]s7,0713.2
0Vt 0
=+
= [25]
Finalmente, reemplazando [24] y [25] en [20b] y [21b], se encuentran las velocidades de los móviles en el instante del encuentro
[ ]s
m17.678(7.071)VA = [26a]
[ ]s
m17.678(7.071)VB = [26b]
Se observa que las velocidades de ambos móviles son iguales en el instante del encuentro. Ejemplo Considere los móviles A y B mostrados en la figura 19. Considere que D = 25 [m], VA0 = 5 [m/s], aA = 6 [m/s2], VB0 = 3 [m/s] y aB = 2 [m/s2]. Determine el instante y posición de encuentro si:
a) A y B parten simultáneamente en t = 0
b) B parte 1 [s] después que A Desarrollo: Pregunta a) las ecuaciones de posición de A y B son
( ) 222AA0A t3t5t6
2
1t5ta
2
1tVtX ⋅+⋅=⋅⋅+⋅=⋅⋅+⋅=
( ) 222BB0B tt325t1
2
1t325ta
2
1tVDtX +⋅+=⋅⋅+⋅+=⋅⋅+⋅+=
En el instante en que A y B se encuentran, XA(t) = XB(t). Luego:
025-t2t2tt325t3t5 222=⋅+⋅⇒+⋅+=⋅+⋅
Resolviendo la ecuación de 2º grado:
[ ] [ ]s -4.07t ys 3.07t4
2042
22
252422t 21
2
==⇒±−
=⋅
⋅⋅+±−=
VB0
D0
x
VA0
aA
aB
Figura 19) Ejemplo de MRUA
17 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Aunque desde un punto de vista matemático ambas soluciones son correctas, desde un punto de vista físico sólo tiene sentido el valor positivo, correspondiente a t1 = 3.07 [s]. Luego:
( ) ( ) [ ]m43.64 3.0733.0753.07X2
A =⋅+⋅=
( ) ( ) [ ]m43.64 3.073.073253.07X2
B =+⋅+= Pregunta b) las ecuaciones de posición de A y B son
( ) 222AA0A t3t5t6
2
1t5ta
2
1tVtX ⋅+⋅=⋅⋅+⋅=⋅⋅+⋅=
( ) ( ) ( ) ( ) ( )
( ) ( ) 023tt1t2t3t3251-t1-t325
1-t12
11-t3251-ta
2
11-tVDtX
222
22
BB0B
=++=+⋅−+−⋅+=+⋅+=
⋅⋅+⋅+=⋅⋅+⋅+=
En el instante en que A y B se encuentran, XA(t) = XB(t). Luego:
023-t4t2tt23t3t5 222=⋅+⋅⇒++=⋅+⋅
Resolviendo la ecuación de 2º grado:
[ ] [ ]s-4.54 t ys2.54 t4
2004
22
232444t 21
2
==⇒±−
=⋅
⋅⋅+±−=
Aunque desde un punto de vista matemático ambas soluciones son correctas, desde un punto de vista físico sólo tiene sentido el valor positivo, correspondiente a t1 = 2.54 [s]. Luego:
( ) ( ) [ ]m31.96 2.5432.5452.54X2
A =⋅+⋅=
( ) ( ) [ ]m31.96 2.542.54232.54X2
B =++=
18 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
4) Movimiento Vertical • Conocer y aplicar las ecuaciones de posición, velocidad y aceleración en el movmiento
vertical (caso particular del MRUA) • Conocer los casos: lanzamiento vertical hacia abajo, lanzamiento vertical hacia arriba y
caída libre. • Para el caso lanzamiento vertical hacia arriba, definir y calcular “tiempo máximo” y “altura
máxima” • Resolver gráfica y analíticamente problemas de encuentro entre dos cuerpos con
Movimiento Vertical. Análisis de la caída de los cuerpos En los tiempos previos a las investigaciones del físico renacentista italiano Galileo Galilei, se sostenía la creencia (heredada de Aristóteles) de que un cuerpo “pesado” se demora menos al caer que uno “liviano”. Galileo refutó esta creencia al hacer el siguiente análisis. Sean A un cuerpo “pesado” y B un cuerpo “liviano”, como los ilustrados en la figura 20. Si unimos A y B con un hilo, formando el cuerpo AB y lo dejamos caer desde gran altura, la suposición de que “A cae con mayor velocidad que B” lleva a dos conclusiones contradictorias entre sí (reducción al absurdo)
• B es más liviano que A ⇒ B cae más lento que A ⇒ En AB, B “frena” a A ⇒ AB cae más lento que A.
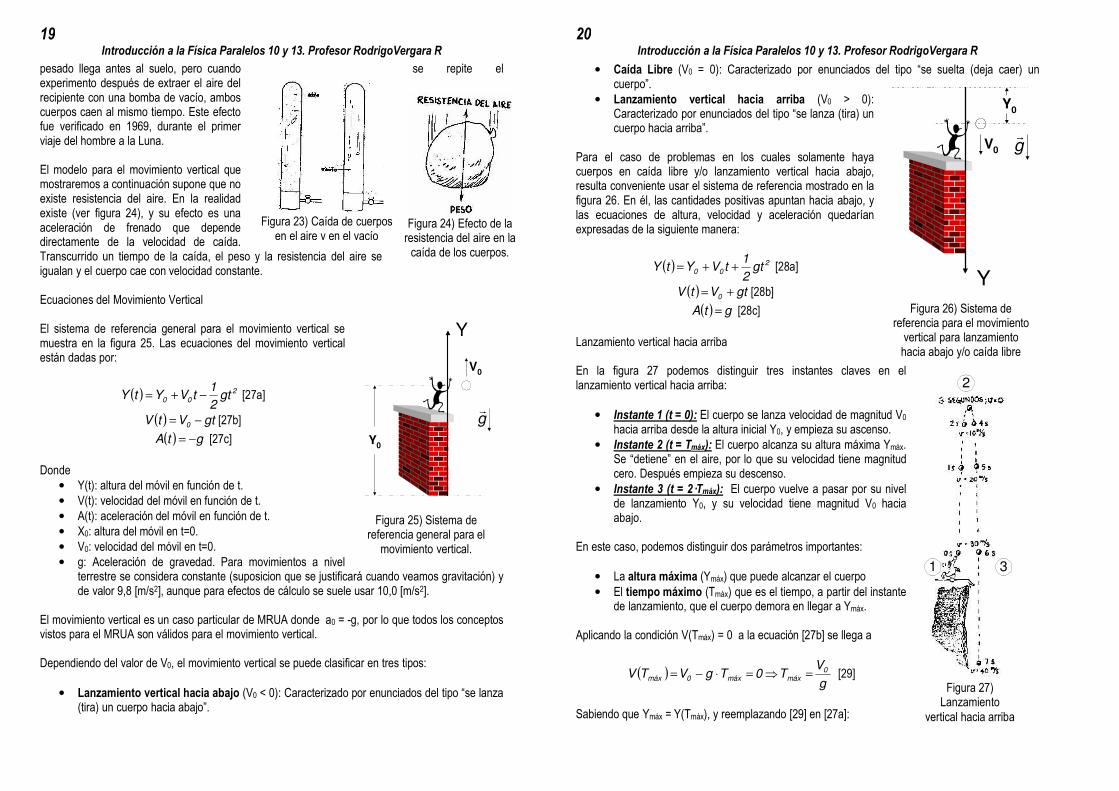
• AB es más pesado que A ⇒ AB cae más rápido que A. Para corroborar su razonamiento, Galileo Galileo se subió a la Torre de Pisa (ver figura 21), y dejó caer dos cuerpos de diferente peso. Ante la sorpresa de todos, los dos cuerpos llegaron juntos al suelo. Si usted deja caer una moneda y un trozo de papel estirado desde una misma altura inicial, la moneda llegará primero. Pero si arruga el trozo de papel formando una “pelota” y repite el experimento, ambos cuerpos llegarán al mismo tiempo (ver figura 22). Esto se debe a que aire opone resistencia a la caída de los cuerpos. Mientras más liviano sea el cuerpo, mayor es la resistencia. Al respecto, Galileo formuló la siguiente teoría: Dos cuerpos cualesquiera que se dejan caer simultáneamente en el vacío, van cayendo siempre juntos, con iguales velocidades. Esto se aprecia en el clásico experimento de laboratorio ilustrado en la figura 23, en el cual se dejan caer dos cuerpos de diferente peso dentro de un recipiente sellado de cristal. Cuando está llena de aire, el cuerpo más
Figura 20) Análisis de Galileo de la caída de los cuerpos
Figura 21) Experimento de Galileo en la Torre de Pisa
Figura 22) Experimento de la moneda
y el trozo de papel
19 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
pesado llega antes al suelo, pero cuando se repite el experimento después de extraer el aire del recipiente con una bomba de vacío, ambos cuerpos caen al mismo tiempo. Este efecto fue verificado en 1969, durante el primer viaje del hombre a la Luna. El modelo para el movimiento vertical que mostraremos a continuación supone que no existe resistencia del aire. En la realidad existe (ver figura 24), y su efecto es una aceleración de frenado que depende directamente de la velocidad de caída. Transcurrido un tiempo de la caída, el peso y la resistencia del aire se igualan y el cuerpo cae con velocidad constante. Ecuaciones del Movimiento Vertical El sistema de referencia general para el movimiento vertical se muestra en la figura 25. Las ecuaciones del movimiento vertical están dadas por:
( ) 2
00 gt2
1tVYtY −+= [27a]
( ) gtVtV 0 −= [27b]
( ) gtA −= [27c] Donde
• Y(t): altura del móvil en función de t. • V(t): velocidad del móvil en función de t. • A(t): aceleración del móvil en función de t. • X0: altura del móvil en t=0. • V0: velocidad del móvil en t=0. • g: Aceleración de gravedad. Para movimientos a nivel
terrestre se considera constante (suposicion que se justificará cuando veamos gravitación) y de valor 9,8 [m/s2], aunque para efectos de cálculo se suele usar 10,0 [m/s2].
El movimiento vertical es un caso particular de MRUA donde a0 = -g, por lo que todos los conceptos vistos para el MRUA son válidos para el movimiento vertical. Dependiendo del valor de V0, el movimiento vertical se puede clasificar en tres tipos:
• Lanzamiento vertical hacia abajo (V0 < 0): Caracterizado por enunciados del tipo “se lanza (tira) un cuerpo hacia abajo”.
Figura 23) Caída de cuerpos
en el aire y en el vacío
Figura 24) Efecto de la resistencia del aire en la caída de los cuerpos.
Y0
g�
V0
Y
Figura 25) Sistema de
referencia general para el movimiento vertical.
20 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
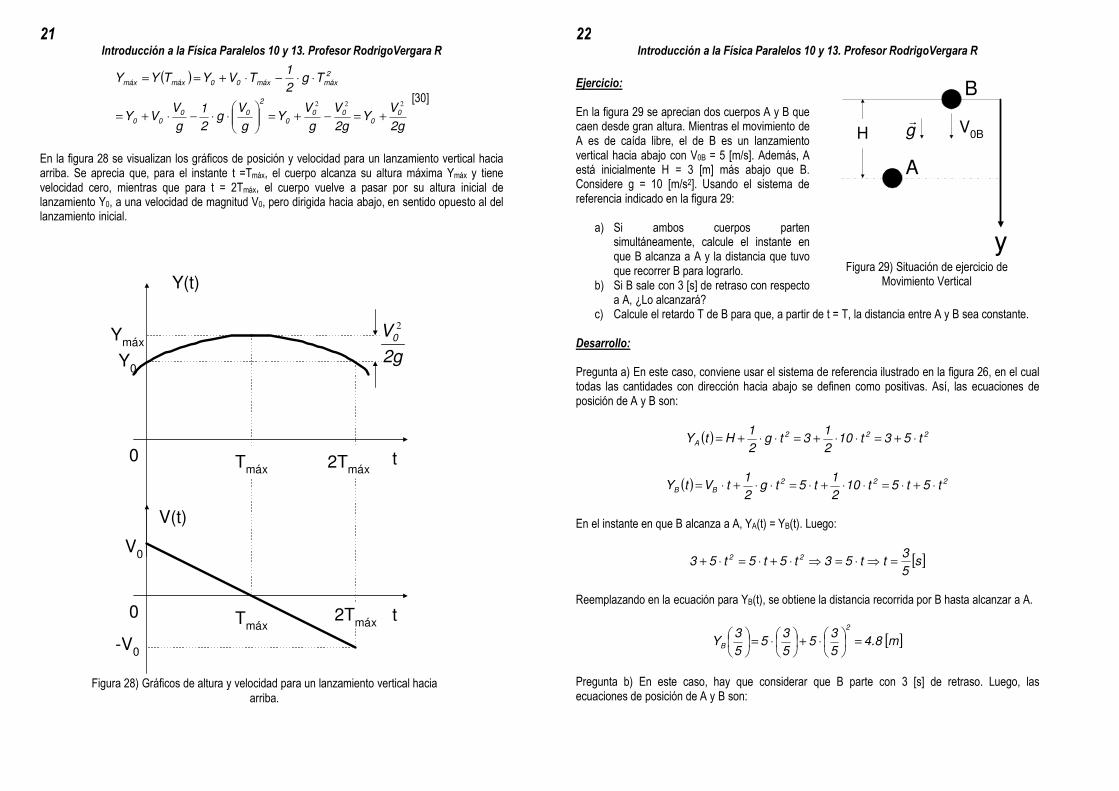
• Caída Libre (V0 = 0): Caracterizado por enunciados del tipo “se suelta (deja caer) un cuerpo”.
• Lanzamiento vertical hacia arriba (V0 > 0): Caracterizado por enunciados del tipo “se lanza (tira) un cuerpo hacia arriba”.
Para el caso de problemas en los cuales solamente haya cuerpos en caída libre y/o lanzamiento vertical hacia abajo, resulta conveniente usar el sistema de referencia mostrado en la figura 26. En él, las cantidades positivas apuntan hacia abajo, y las ecuaciones de altura, velocidad y aceleración quedarían expresadas de la siguiente manera:
( ) 200 gt
2
1tVYtY ++= [28a]
( ) gtVtV 0 += [28b]
( ) gtA = [28c] Lanzamiento vertical hacia arriba En la figura 27 podemos distinguir tres instantes claves en el lanzamiento vertical hacia arriba:
• Instante 1 (t = 0): El cuerpo se lanza velocidad de magnitud V0 hacia arriba desde la altura inicial Y0, y empieza su ascenso.
• Instante 2 (t = Tmáx): El cuerpo alcanza su altura máxima Ymáx. Se “detiene” en el aire, por lo que su velocidad tiene magnitud cero. Después empieza su descenso.
• Instante 3 (t = 2·Tmáx): El cuerpo vuelve a pasar por su nivel de lanzamiento Y0, y su velocidad tiene magnitud V0 hacia abajo.
En este caso, podemos distinguir dos parámetros importantes:
• La altura máxima (Ymáx) que puede alcanzar el cuerpo • El tiempo máximo (Tmáx) que es el tiempo, a partir del instante
de lanzamiento, que el cuerpo demora en llegar a Ymáx. Aplicando la condición V(Tmáx) = 0 a la ecuación [27b] se llega a
( )g
VT0TgVTV 0
máxmáx0máx =⇒=⋅−= [29]
Sabiendo que Ymáx = Y(Tmáx), y reemplazando [29] en [27a]:
Y0
g�
Y
V0
Figura 26) Sistema de
referencia para el movimiento vertical para lanzamiento hacia abajo y/o caída libre
1 3
2
Figura 27)
Lanzamiento vertical hacia arriba
21 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
( )
2g
VY
2g
V
g
VY
g
Vg
2
1
g
VVY
Tg2
1TVYTYY
00
000
2
0000
2
máxmáx00máxmáx
222
+=−+=
⋅⋅−⋅+=
⋅⋅−⋅+==
[30]
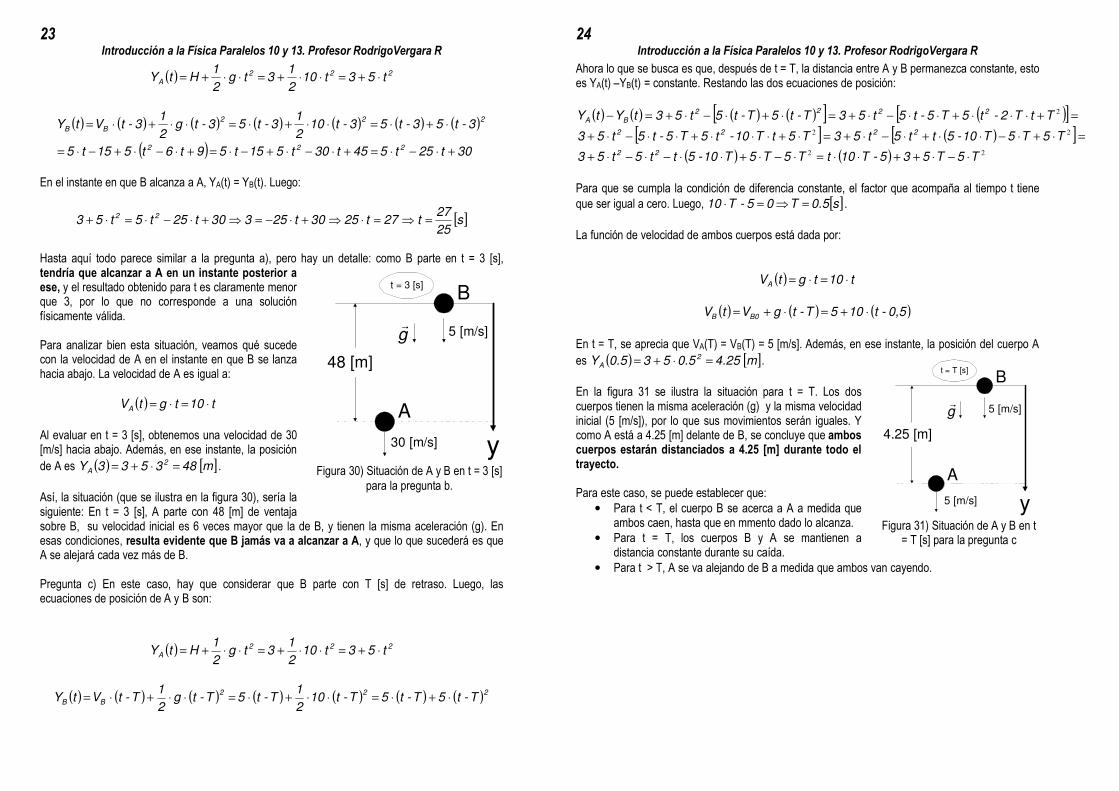
En la figura 28 se visualizan los gráficos de posición y velocidad para un lanzamiento vertical hacia arriba. Se aprecia que, para el instante t =Tmáx, el cuerpo alcanza su altura máxima Ymáx y tiene velocidad cero, mientras que para t = 2Tmáx, el cuerpo vuelve a pasar por su altura inicial de lanzamiento Y0, a una velocidad de magnitud V0, pero dirigida hacia abajo, en sentido opuesto al del lanzamiento inicial.
Y(t)
V(t)
t
t
0
0
Tmáx
Tmáx
2Tmáx
2Tmáx
V0
-V0
Y0
Ymáx
2g
V02
Figura 28) Gráficos de altura y velocidad para un lanzamiento vertical hacia
arriba.
22 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
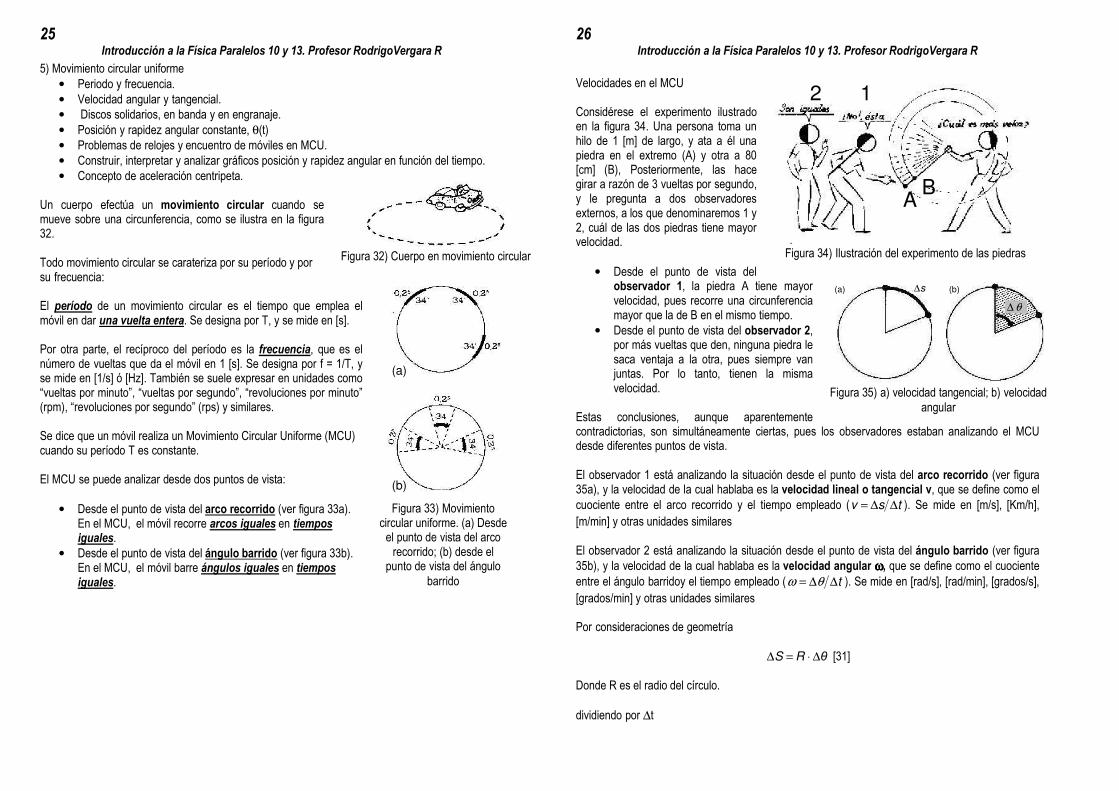
Ejercicio: En la figura 29 se aprecian dos cuerpos A y B que caen desde gran altura. Mientras el movimiento de A es de caída libre, el de B es un lanzamiento vertical hacia abajo con V0B = 5 [m/s]. Además, A está inicialmente H = 3 [m] más abajo que B. Considere g = 10 [m/s2]. Usando el sistema de referencia indicado en la figura 29:
a) Si ambos cuerpos parten simultáneamente, calcule el instante en que B alcanza a A y la distancia que tuvo que recorrer B para lograrlo.
b) Si B sale con 3 [s] de retraso con respecto a A, ¿Lo alcanzará?
c) Calcule el retardo T de B para que, a partir de t = T, la distancia entre A y B sea constante. Desarrollo: Pregunta a) En este caso, conviene usar el sistema de referencia ilustrado en la figura 26, en el cual todas las cantidades con dirección hacia abajo se definen como positivas. Así, las ecuaciones de posición de A y B son:
( ) 222A t53t10
2
13tg
2
1HtY ⋅+=⋅⋅+=⋅⋅+=
( ) 222BB t5t5t10
2
1t5tg
2
1tVtY ⋅+⋅=⋅⋅+⋅=⋅⋅+⋅=
En el instante en que B alcanza a A, YA(t) = YB(t). Luego:
[ ]s5
3tt53t5t5t53 22
=⇒⋅=⇒⋅+⋅=⋅+
Reemplazando en la ecuación para YB(t), se obtiene la distancia recorrida por B hasta alcanzar a A.
[ ]m4.8 5
35
5
35
5
3Y
2
B =
⋅+
⋅=
Pregunta b) En este caso, hay que considerar que B parte con 3 [s] de retraso. Luego, las ecuaciones de posición de A y B son:
H V0B
A
B
y
g�
Figura 29) Situación de ejercicio de
Movimiento Vertical
23 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
( ) 222A t53t10
2
13tg
2
1HtY ⋅+=⋅⋅+=⋅⋅+=
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) 30t25t545t30t515t59t6t515t5
3-t53-t53-t102
13-t53-tg
2
13-tVtY
222
222
BB
+⋅−⋅=+⋅−⋅+−⋅=+⋅−⋅+−⋅=
⋅+⋅=⋅⋅+⋅=⋅⋅+⋅=
En el instante en que B alcanza a A, YA(t) = YB(t). Luego:
[ ]s25
27t27t2530t25330t25t5t53 22
=⇒=⋅⇒+⋅−=⇒+⋅−⋅=⋅+
Hasta aquí todo parece similar a la pregunta a), pero hay un detalle: como B parte en t = 3 [s], tendría que alcanzar a A en un instante posterior a ese, y el resultado obtenido para t es claramente menor que 3, por lo que no corresponde a una solución físicamente válida. Para analizar bien esta situación, veamos qué sucede con la velocidad de A en el instante en que B se lanza hacia abajo. La velocidad de A es igual a:
( ) t10tgtVA ⋅=⋅= Al evaluar en t = 3 [s], obtenemos una velocidad de 30 [m/s] hacia abajo. Además, en ese instante, la posición de A es ( ) [ ]m48 3533Y 2
A =⋅+= . Así, la situación (que se ilustra en la figura 30), sería la siguiente: En t = 3 [s], A parte con 48 [m] de ventaja sobre B, su velocidad inicial es 6 veces mayor que la de B, y tienen la misma aceleración (g). En esas condiciones, resulta evidente que B jamás va a alcanzar a A, y que lo que sucederá es que A se alejará cada vez más de B. Pregunta c) En este caso, hay que considerar que B parte con T [s] de retraso. Luego, las ecuaciones de posición de A y B son:
( ) 222A t53t10
2
13tg
2
1HtY ⋅+=⋅⋅+=⋅⋅+=
( ) ( ) ( ) ( ) ( ) ( ) ( )222
BB T-t5T-t5T-t102
1T-t5T-tg
2
1T-tVtY ⋅+⋅=⋅⋅+⋅=⋅⋅+⋅=
48 [m]
5 [m/s]
A
B
y
g�
30 [m/s]
t = 3 [s]
Figura 30) Situación de A y B en t = 3 [s]
para la pregunta b.
24 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Ahora lo que se busca es que, después de t = T, la distancia entre A y B permanezca constante, esto es YA(t) –YB(t) = constante. Restando las dos ecuaciones de posición:
( ) ( ) ( ) ( )[ ] ( )[ ][ ] ( )[ ]
( ) ( ) 22
22
2
T5T535-T10tT5T5T10-5tt5t53
T5T5T10-5tt5t53T5tT10-t5T5-t5t53
TtT2-t5T5-t5t53T-t5T-t5t53tYtY
22
2222
2222BA
⋅−⋅++⋅⋅=⋅−⋅+⋅⋅−⋅−⋅+
=⋅+⋅−⋅⋅+⋅−⋅+=⋅+⋅⋅⋅+⋅⋅−⋅+
=+⋅⋅⋅+⋅⋅−⋅+=⋅+⋅−⋅+=−
Para que se cumpla la condición de diferencia constante, el factor que acompaña al tiempo t tiene que ser igual a cero. Luego, [ ]s0.5T05-T10 =⇒=⋅ .
La función de velocidad de ambos cuerpos está dada por:
( ) t10tgtVA ⋅=⋅=
( ) ( ) ( )0,5-t105T-tgVtV B0B ⋅+=⋅+=
En t = T, se aprecia que VA(T) = VB(T) = 5 [m/s]. Además, en ese instante, la posición del cuerpo A es ( ) [ ]m 4.250.5530.5Y 2
A =⋅+= . En la figura 31 se ilustra la situación para t = T. Los dos cuerpos tienen la misma aceleración (g) y la misma velocidad inicial (5 [m/s]), por lo que sus movimientos serán iguales. Y como A está a 4.25 [m] delante de B, se concluye que ambos cuerpos estarán distanciados a 4.25 [m] durante todo el trayecto. Para este caso, se puede establecer que:
• Para t < T, el cuerpo B se acerca a A a medida que ambos caen, hasta que en mmento dado lo alcanza.
• Para t = T, los cuerpos B y A se mantienen a distancia constante durante su caída.
• Para t > T, A se va alejando de B a medida que ambos van cayendo.
4.25 [m]
5 [m/s]
A
B
y
g�
5 [m/s]
t = T [s]
Figura 31) Situación de A y B en t
= T [s] para la pregunta c
25 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
5) Movimiento circular uniforme • Periodo y frecuencia. • Velocidad angular y tangencial. • Discos solidarios, en banda y en engranaje. • Posición y rapidez angular constante, θ(t) • Problemas de relojes y encuentro de móviles en MCU. • Construir, interpretar y analizar gráficos posición y rapidez angular en función del tiempo. • Concepto de aceleración centripeta.
Un cuerpo efectúa un movimiento circular cuando se mueve sobre una circunferencia, como se ilustra en la figura 32. Todo movimiento circular se carateriza por su período y por su frecuencia: El período de un movimiento circular es el tiempo que emplea el móvil en dar una vuelta entera. Se designa por T, y se mide en [s]. Por otra parte, el recíproco del período es la frecuencia, que es el número de vueltas que da el móvil en 1 [s]. Se designa por f = 1/T, y se mide en [1/s] ó [Hz]. También se suele expresar en unidades como “vueltas por minuto”, “vueltas por segundo”, “revoluciones por minuto” (rpm), “revoluciones por segundo” (rps) y similares. Se dice que un móvil realiza un Movimiento Circular Uniforme (MCU) cuando su período T es constante. El MCU se puede analizar desde dos puntos de vista:
• Desde el punto de vista del arco recorrido (ver figura 33a). En el MCU, el móvil recorre arcos iguales en tiempos iguales.
• Desde el punto de vista del ángulo barrido (ver figura 33b). En el MCU, el móvil barre ángulos iguales en tiempos iguales.
Figura 32) Cuerpo en movimiento circular
(a)
(b)
Figura 33) Movimiento circular uniforme. (a) Desde el punto de vista del arco recorrido; (b) desde el
punto de vista del ángulo barrido
26 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
Velocidades en el MCU Considérese el experimento ilustrado en la figura 34. Una persona toma un hilo de 1 [m] de largo, y ata a él una piedra en el extremo (A) y otra a 80 [cm] (B), Posteriormente, las hace girar a razón de 3 vueltas por segundo, y le pregunta a dos observadores externos, a los que denominaremos 1 y 2, cuál de las dos piedras tiene mayor velocidad.
• Desde el punto de vista del observador 1, la piedra A tiene mayor velocidad, pues recorre una circunferencia mayor que la de B en el mismo tiempo.
• Desde el punto de vista del observador 2, por más vueltas que den, ninguna piedra le saca ventaja a la otra, pues siempre van juntas. Por lo tanto, tienen la misma velocidad.
Estas conclusiones, aunque aparentemente contradictorias, son simultáneamente ciertas, pues los observadores estaban analizando el MCU desde diferentes puntos de vista. El observador 1 está analizando la situación desde el punto de vista del arco recorrido (ver figura 35a), y la velocidad de la cual hablaba es la velocidad lineal o tangencial v, que se define como el cuociente entre el arco recorrido y el tiempo empleado ( tsv ∆∆= ). Se mide en [m/s], [Km/h], [m/min] y otras unidades similares El observador 2 está analizando la situación desde el punto de vista del ángulo barrido (ver figura 35b), y la velocidad de la cual hablaba es la velocidad angular ωωωω, que se define como el cuociente entre el ángulo barridoy el tiempo empleado ( t∆∆= θω ). Se mide en [rad/s], [rad/min], [grados/s], [grados/min] y otras unidades similares Por consideraciones de geometría
θRS ∆⋅=∆ [31] Donde R es el radio del círculo. dividiendo por ∆t
AB
12
Figura 34) Ilustración del experimento de las piedras
θ∆
s∆(a) (b)
Figura 35) a) velocidad tangencial; b) velocidad angular
27 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
ωRvt
θR
t
s⋅=⇒
∆
∆=
∆
∆ [32]
Donde tsv ∆∆= es la rapidez media de cambio de arco recorrido y t∆∆= θω es la rapidez
media de cambio del ángulo barrido. Haciendo ∆t → 0, vv → y ωω → , se llega a:
ω⋅= Rv [33] Para un cuerpo en MCU, la velocidad tangencial se puede definir como:
T
R2v
⋅⋅=
π [34]
Donde T es el período. Similarmente, se puede definir la velocidad angular como:
T
2 πω
⋅= [35]
Reemplazando [34] en [35]
RRT
2
T
R2v ⋅=⋅
⋅=
⋅⋅= ω
ππ [36]
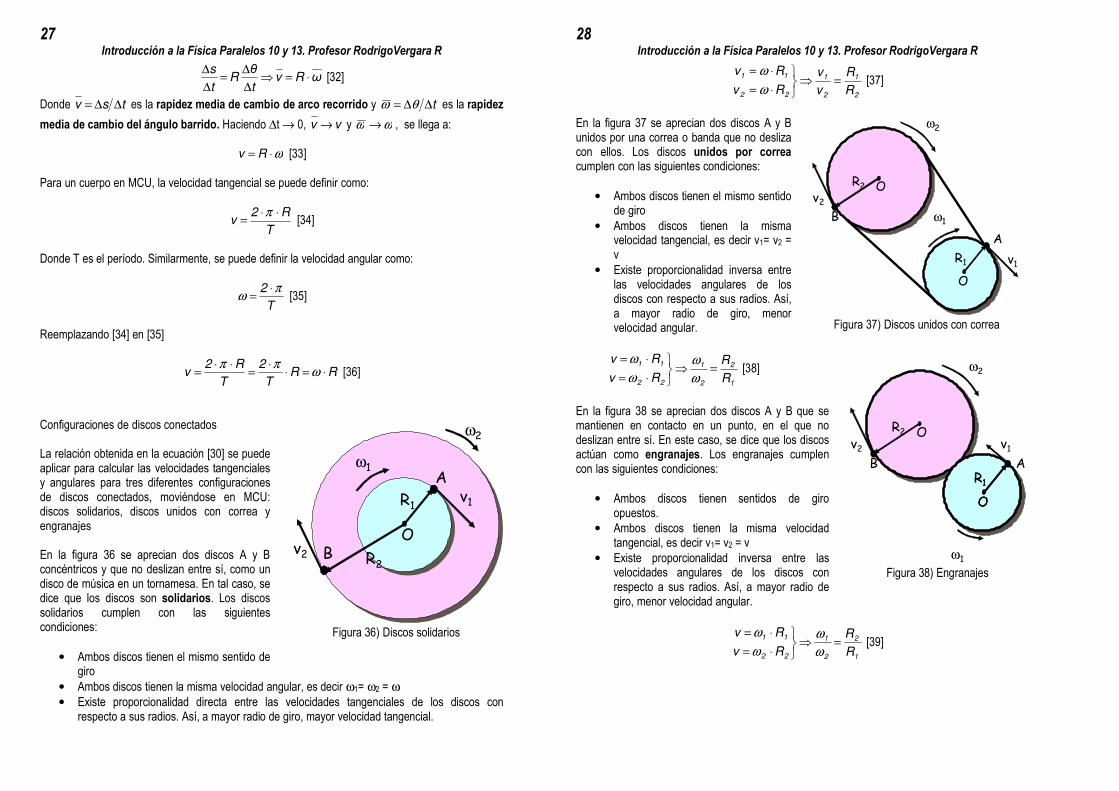
Configuraciones de discos conectados La relación obtenida en la ecuación [30] se puede aplicar para calcular las velocidades tangenciales y angulares para tres diferentes configuraciones de discos conectados, moviéndose en MCU: discos solidarios, discos unidos con correa y engranajes En la figura 36 se aprecian dos discos A y B concéntricos y que no deslizan entre sí, como un disco de música en un tornamesa. En tal caso, se dice que los discos son solidarios. Los discos solidarios cumplen con las siguientes condiciones:
• Ambos discos tienen el mismo sentido de giro
• Ambos discos tienen la misma velocidad angular, es decir ω1= ω2 = ω • Existe proporcionalidad directa entre las velocidades tangenciales de los discos con
respecto a sus radios. Así, a mayor radio de giro, mayor velocidad tangencial.
R1
R2
O
B
A
v1
v2
ω1
ω2
Figura 36) Discos solidarios
28 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
2
1
2
1
22
11
R
R
v
v
Rv
Rv=⇒
⋅=
⋅=
ω
ω [37]
En la figura 37 se aprecian dos discos A y B unidos por una correa o banda que no desliza con ellos. Los discos unidos por correa cumplen con las siguientes condiciones:
• Ambos discos tienen el mismo sentido de giro
• Ambos discos tienen la misma velocidad tangencial, es decir v1= v2 = v
• Existe proporcionalidad inversa entre las velocidades angulares de los discos con respecto a sus radios. Así, a mayor radio de giro, menor velocidad angular.
1
2
2
1
22
11
R
R
Rv
Rv=⇒
⋅=
⋅=
ω
ω
ω
ω [38]
En la figura 38 se aprecian dos discos A y B que se mantienen en contacto en un punto, en el que no deslizan entre sí. En este caso, se dice que los discos actúan como engranajes. Los engranajes cumplen con las siguientes condiciones:
• Ambos discos tienen sentidos de giro opuestos.
• Ambos discos tienen la misma velocidad tangencial, es decir v1= v2 = v
• Existe proporcionalidad inversa entre las velocidades angulares de los discos con respecto a sus radios. Así, a mayor radio de giro, menor velocidad angular.
1
2
2
1
22
11
R
R
Rv
Rv=⇒
⋅=
⋅=
ω
ω
ω
ω [39]
R2
B
A
ω2
v1
v2
R1
O
O
ω1
Figura 37) Discos unidos con correa
R2
B A
ω2
v1v2
R1
O
R1
O
O
ω1 Figura 38) Engranajes
29 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
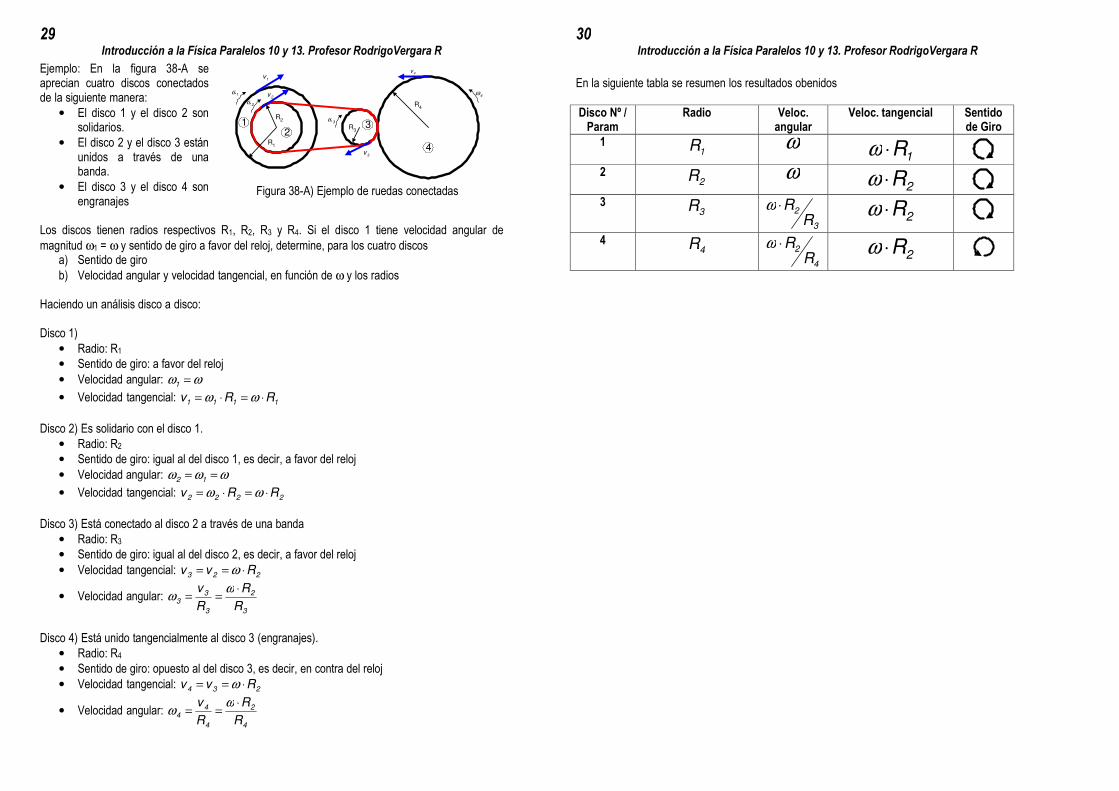
Ejemplo: En la figura 38-A se aprecian cuatro discos conectados de la siguiente manera:
• El disco 1 y el disco 2 son solidarios.
• El disco 2 y el disco 3 están unidos a través de una banda.
• El disco 3 y el disco 4 son engranajes
Los discos tienen radios respectivos R1, R2, R3 y R4. Si el disco 1 tiene velocidad angular de magnitud ω1 = ω y sentido de giro a favor del reloj, determine, para los cuatro discos
a) Sentido de giro b) Velocidad angular y velocidad tangencial, en función de ω y los radios
Haciendo un análisis disco a disco: Disco 1)
• Radio: R1 • Sentido de giro: a favor del reloj • Velocidad angular: ωω =1
• Velocidad tangencial: 1111 RRv ⋅=⋅= ωω Disco 2) Es solidario con el disco 1.
• Radio: R2 • Sentido de giro: igual al del disco 1, es decir, a favor del reloj • Velocidad angular: ωωω == 12
• Velocidad tangencial: 2222 RRv ⋅=⋅= ωω Disco 3) Está conectado al disco 2 a través de una banda
• Radio: R3 • Sentido de giro: igual al del disco 2, es decir, a favor del reloj • Velocidad tangencial: 223 Rvv ⋅== ω
• Velocidad angular: 3
2
3
33
R
R
R
v ⋅==
ωω
Disco 4) Está unido tangencialmente al disco 3 (engranajes).
• Radio: R4 • Sentido de giro: opuesto al del disco 3, es decir, en contra del reloj • Velocidad tangencial: 234 Rvv ⋅== ω
• Velocidad angular: 4
2
4
44
R
R
R
v ⋅==
ωω
R1
R2
R3
R4
1ω
2ω
3ω
4ω
1v
2v
3v
4v
12
3
4
Figura 38-A) Ejemplo de ruedas conectadas
30 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
En la siguiente tabla se resumen los resultados obenidos Disco Nº / Param
Radio Veloc. angular
Veloc. tangencial Sentido de Giro
1 1R ω
1R⋅ω 2
2R ω 2R⋅ω
3 3R
3
2
RR⋅ω
2R⋅ω
4 4R
4
2
RR⋅ω
2R⋅ω
31 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
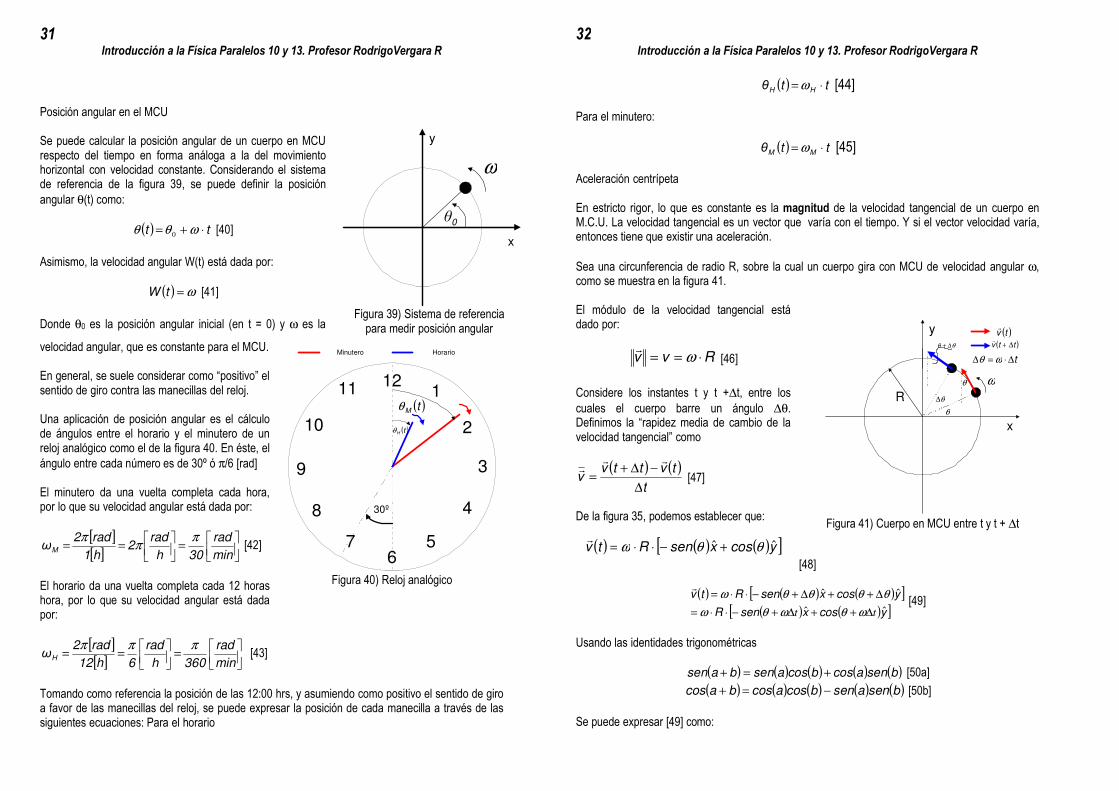
Posición angular en el MCU Se puede calcular la posición angular de un cuerpo en MCU respecto del tiempo en forma análoga a la del movimiento horizontal con velocidad constante. Considerando el sistema de referencia de la figura 39, se puede definir la posición angular θ(t) como:
( ) tt ⋅+= ωθθ0
[40]
Asimismo, la velocidad angular W(t) está dada por:
( ) ω=tW [41] Donde θ0 es la posición angular inicial (en t = 0) y ω es la
velocidad angular, que es constante para el MCU. En general, se suele considerar como “positivo” el sentido de giro contra las manecillas del reloj. Una aplicación de posición angular es el cálculo de ángulos entre el horario y el minutero de un reloj analógico como el de la figura 40. En éste, el ángulo entre cada número es de 30º ó π/6 [rad] El minutero da una vuelta completa cada hora, por lo que su velocidad angular está dada por:
[ ][ ]
=
==
min
rad
30h
rad2
h1
rad2ωM
ππ
π [42]
El horario da una vuelta completa cada 12 horas hora, por lo que su velocidad angular está dada por:
[ ][ ]
=
==
min
rad
360h
rad
6h12
rad2ωH
πππ [43]
Tomando como referencia la posición de las 12:00 hrs, y asumiendo como positivo el sentido de giro a favor de las manecillas del reloj, se puede expresar la posición de cada manecilla a través de las siguientes ecuaciones: Para el horario
x
y
ω
0θ
Figura 39) Sistema de referencia para medir posición angular
12
39
6
1
2
4
57
8
10
11
30º
( )tHθ
( )tMθ
Minutero Horario
Figura 40) Reloj analógico
32 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
( ) ttθ HH ⋅= ω [44]
Para el minutero:
( ) ttθ MM ⋅= ω [45] Aceleración centrípeta En estricto rigor, lo que es constante es la magnitud de la velocidad tangencial de un cuerpo en M.C.U. La velocidad tangencial es un vector que varía con el tiempo. Y si el vector velocidad varía, entonces tiene que existir una aceleración. Sea una circunferencia de radio R, sobre la cual un cuerpo gira con MCU de velocidad angular ω, como se muestra en la figura 41. El módulo de la velocidad tangencial está dado por:
Rvv ⋅== ω�
[46]
Considere los instantes t y t +∆t, entre los cuales el cuerpo barre un ángulo ∆θ. Definimos la “rapidez media de cambio de la velocidad tangencial” como
( ) ( )
t
tvttvv
∆
−∆+=
��
�
[47]
De la figura 35, podemos establecer que:
( ) ( ) ( )[ ]ycosxsenRtv ˆˆ θθω +−⋅⋅=�
[48]
( ) ( ) ( )[ ]
( ) ( )[ ]ycosxsenR
ycosxsenRtv
ˆˆ
ˆˆ
tt ∆++∆+−⋅⋅=
∆++∆+−⋅⋅=
ωθωθω
θθθθω�
[49]
Usando las identidades trigonométricas
( ) ( ) ( ) ( ) ( )bsenacosbcosasenbasen +=+ [50a]
( ) ( ) ( ) ( ) ( )bsenasenbcosacosbacos −=+ [50b] Se puede expresar [49] como:
y
x
Rθ
θ∆
ω
( )tv�
( )ttv ∆+�
θ
θθ ∆+
t∆⋅=∆ ωθ
Figura 41) Cuerpo en MCU entre t y t + ∆t
33 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )( ) ]ˆ
ˆ[
ysensencoscos
xsencoscossenRtv
tt
tt
∆−∆+
∆+∆−⋅⋅=
ωθωθ
ωθωθω�
[51] Reemplazando [48] y [51] en [47], se llega a
( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( )( ) ]ˆ
ˆ[
ycossensencoscos
xsensencoscossent
Rv
θωθωθ
θωθωθω
−∆−∆+
−∆+∆−∆
⋅=
tt
tt
�
[52] En la figura 42 se observa que, a medida que ∆t → 0, el vector “rapidez media de cambio de velocidad tangencial “dado por [52] tiende a tomar la dirección del radio R y el sentido hacia el centro de giro. La aceleración centrípeta es el límite de la expresión [47] cuando ∆t → 0.
( ) ( )t
tvttvlimvlima
0t0tC
∆
−∆+==
→∆→∆
��
��
[53]
Así, ∆t → 0 ⇒ ∆θ → 0: En este caso, se pueden hacer las aproximaciones ( ) tt ∆≈∆ ωωsen y
( ) 1cos ≈∆tω . Reemplazando [52] en [53] y aplicando estas aproximaciones:
( ) ( ) ( )( )
( ) ( ) ( )( )
( ) ( )
( ) ( ) ]ˆˆ[
]ˆˆ[
]ˆ
ˆ[
ysen-xcosR
ysen-xcost
Rlim
ycossencos
xsencossent
Rlima
2
0t
0tC
θθω
θωθωω
θθωθ
θθωθω
−⋅⋅=
∆∆−∆
⋅=
−∆−+
−∆+−∆
⋅=
→∆
→∆
tt
t
t
�
[54] En [54] se verifica claramente que
Ra 2C ⋅= ω�
[55]
Se define la aceleración centrípeta como aquella aceleración instantánea que sufre un cuerpo en M.C.U.
y
x
Rθ
ω
( )tv�
( )taC
�
Figura 43) Vectores velocidad tangencial y aceleración centrípeta en diferentes puntos de la trayectoria circunferencial.
Figura 42) vector rapidez media de cambio de velocidad
tangencial.
34 Introducción a la Física Paralelos 10 y 13. Profesor RodrigoVergara R
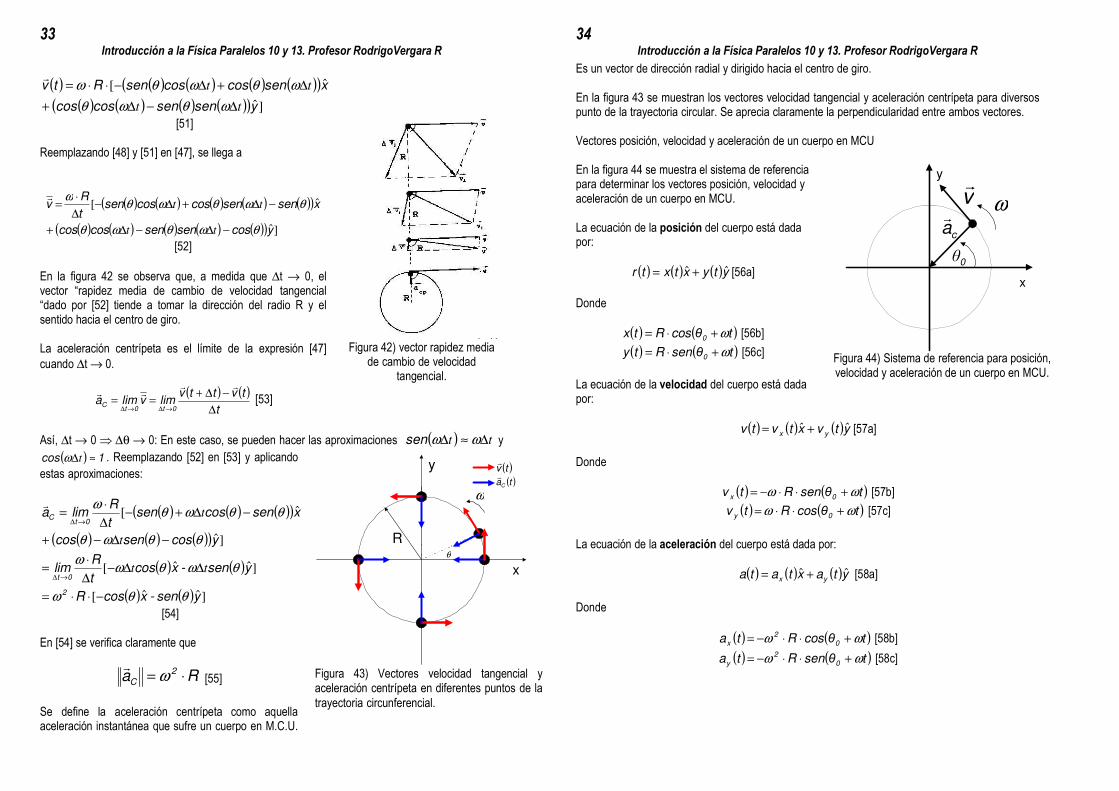
Es un vector de dirección radial y dirigido hacia el centro de giro. En la figura 43 se muestran los vectores velocidad tangencial y aceleración centrípeta para diversos punto de la trayectoria circular. Se aprecia claramente la perpendicularidad entre ambos vectores. Vectores posición, velocidad y aceleración de un cuerpo en MCU En la figura 44 se muestra el sistema de referencia para determinar los vectores posición, velocidad y aceleración de un cuerpo en MCU. La ecuación de la posición del cuerpo está dada por:
( ) ( ) ( )ytyxtxtr ˆˆ += [56a] Donde
( ) ( )tθcosRtx 0 ω+⋅= [56b]
( ) ( )tθsenRty 0 ω+⋅= [56c]
La ecuación de la velocidad del cuerpo está dada por:
( ) ( ) ( )ytvxtvtv yxˆˆ += [57a]
Donde
( ) ( )tθsenRtv 0x ωω +⋅⋅−= [57b]
( ) ( )tθcosRtv 0y ωω +⋅⋅= [57c]
La ecuación de la aceleración del cuerpo está dada por:
( ) ( ) ( )ytaxtata yxˆˆ += [58a]
Donde
( ) ( )tθcosRta 02
x ωω +⋅⋅−= [58b]
( ) ( )tθsenRta 0
2
y ωω +⋅⋅−= [58c]
x
y
ω
0θ
v�
ca�
Figura 44) Sistema de referencia para posición, velocidad y aceleración de un cuerpo en MCU.