Embed Size (px)
DESCRIPTION
assadasdadasdad
Citation preview
ISPITIVANJE DINAMIČKIH OSOBINA VOZILA
Garača Emin
Sažetak: U zadatom projektnom zadatku je bilo potrebno simulirati pravolinijsko kretanje vozila pri njegovom ubrzanju ili kočenju. Koristeći program Simulink, simulirani su uslovi koji se javljaju pri ovakvim kretanjima, uz pomoć diferencijalnih jednačina koje opisuju dinamiku pravolinijskog kretanja vozila, kotrljanje točka i sl. U Simulinku su dobijeni dijagrami koji predstavljaju promjenu određenih dinamičkih veličina i njihove međusobne zavisnosti, koji će biti prikazani u nastavku.
Ključne riječi: kočenje ubrzanje dinamika kretanja vozila
1. UVOD
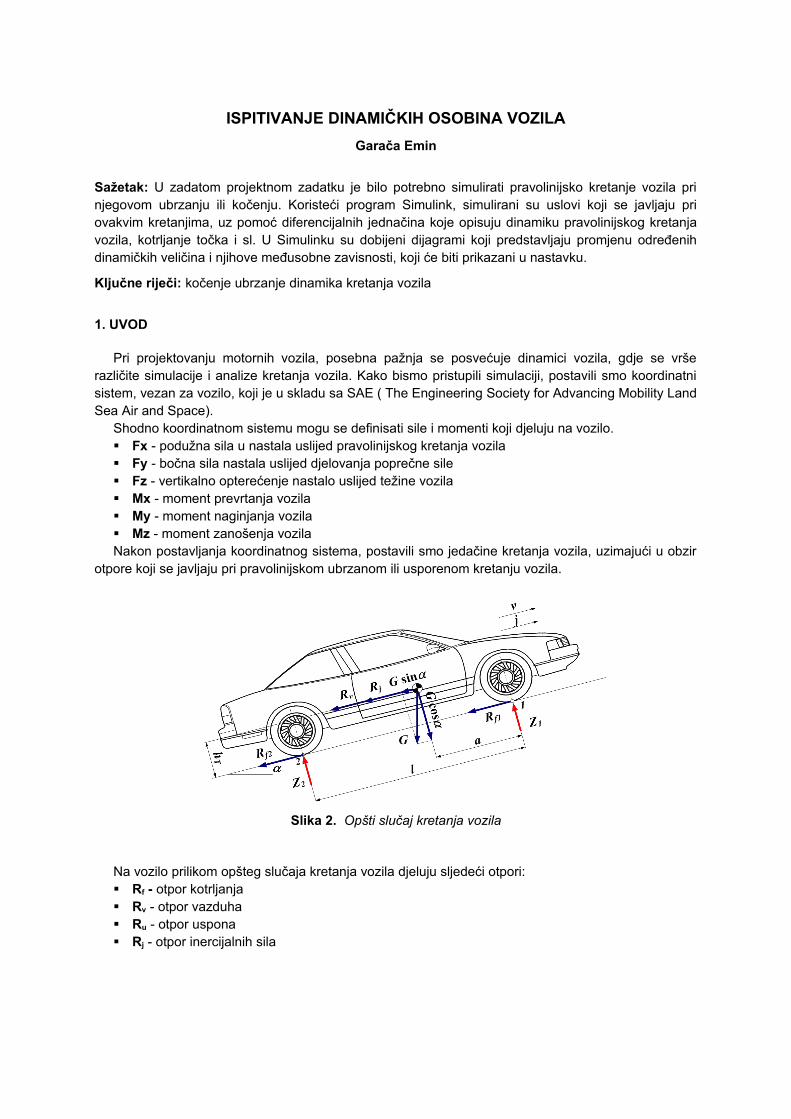
Pri projektovanju motornih vozila, posebna pažnja se posvećuje dinamici vozila, gdje se vrše različite simulacije i analize kretanja vozila. Kako bismo pristupili simulaciji, postavili smo koordinatni sistem, vezan za vozilo, koji je u skladu sa SAE ( The Engineering Society for Advancing Mobility Land Sea Air and Space).
Shodno koordinatnom sistemu mogu se definisati sile i momenti koji djeluju na vozilo. Fx - podužna sila u nastala uslijed pravolinijskog kretanja vozila Fy - bočna sila nastala uslijed djelovanja poprečne sile Fz - vertikalno opterećenje nastalo uslijed težine vozila Mx - moment prevrtanja vozila My - moment naginjanja vozila Mz - moment zanošenja vozilaNakon postavljanja koordinatnog sistema, postavili smo jedačine kretanja vozila, uzimajući u obzir
otpore koji se javljaju pri pravolinijskom ubrzanom ili usporenom kretanju vozila.
Slika 2. Opšti slučaj kretanja vozila
Na vozilo prilikom opšteg slučaja kretanja vozila djeluju sljedeći otpori: Rf - otpor kotrljanja Rv - otpor vazduha Ru - otpor uspona Rj - otpor inercijalnih sila

Amil Damjanović, Irma Bejdić
Diferencijalna jednačina za opšti slučaj pravolinijskog kretanja glasi:
F x=Rv+R f 1+R f 2+R j+G sinα (1)
gdje je:
R f=R f 1+Rf 2=f ∙ (Z1+Z2 )=mgf (2)
R v=12cx Aρ v
2(3)
R j=mdvdt
(4)
Pored definisanja otpora koje djeluju na vozilo prilikom kretanja, za simulaciju je potrebno postaviti i jednačinu kotrljanja točka, momentne jednačine, jednačine klizanja točka, te model Burckhardt, koji daje zavisnost koeficijenta prijanjanja od klizanja, brzine, vertikalnog opterećenja i uslova na putu.
Slika 3. Opšti slučaj kotrljanja točka
Jednačina kotrljanja točka za opšti slučaj glasi:
M T−I Tdωdt
−F x ∙ rd−M f=0 (5)
gdje je: MT- moment na točku IT – inercioni moment točka ω – ugaona brzina točka
rd – dinamički radijus točka
Mf – otporni moment kotrljanja točka
Otporni moment kotrljanja točka se računa kao:
M f=F z ∙ f ∙r d (6)
Gdje je f - koeficijent otpora kotrljanja tačka, koji smo dobili uz pomoć izraza po Wallenowitz-u, koji glasi:
2
v
Mo
G
r d
eZ
X
O
Ispitivanje dinamičkih osobina vozila
f=f 0+ f 1 v+ f 2 v4
(7)
gdje su, za radijalne pneumatike za velike brzine, vrijednosti koeficijenata:
f 0=9 ,91⋅10−3 ; f 1=1 ,95⋅10
−5 ; f 2=1 ,76⋅10−9 .
Također, postavili smo jednačine za klizanje, odnosno proklizavanje točka.
Slika 4. Proklizavanje točka Slika 5. Klizanje točka
Za slučaj ubrzanja, jednačina proklizavanja točka glasi:
s=vc−v x
vc
(8)
Gdje je:
vc−¿ obodna brzina točka
vc=ω∙rd (9)
vx – brzina vozila
Dok je za slučaj kočenja vozila, jednačina klizanja točka:
s=vx−vc
v x
(10)
Potrebno je postaviti i momentne jednačine, koje smo dobili postavljanjem uslova da je moment na dodiru točkova prednje i zadnje osovine i podloge jednak nuli. Izražavajući iz ovih jednačina vertikalna opterećenja prednje i zadnje osovine, dobijamo:
F z1=1l
[mg (l−a )−mj hT ] (11)
F z2=1l
[mga+mj hT ] (12)
Uzeta je i pretpostavka da je:
F x=F z ∙ φ (13)
3

Amil Damjanović, Irma Bejdić
gdje je φ koeficijent prijanjanja, koji smo dobili koristeći model Burckhardt:
φ=[C1(1−e−C2|s|)−C3|s|] ∙e−C4|s|v ∙¿) (14)
gdje vrijednosti koeficijenata zavise od stanja puta:
Suh asfalt Mokar asfaltC1=1,2801C2=23,99C3=0,52
C4=0,03sm
C5=0,00151
kN2
C1=0,857C2=33,822C3=0,347
C4=0,03sm
C5=0,00151
kN2
Kako bi dobili što tačnije rezultate, usvojiti ćemo karakteristike realnog vozila, u ovom slučaju Renault Grand Scenic 1,4 TC 130 DYNAMIC.
Vrijednosti karakteristika vozila koje su korištene u ovom projektnom zadatku su: Me,max=195Nm – maksimalni obrtni moment motora I1=3,73 – prenosni odnos u prvom stepenu prenosa I2=2,11 – prenosni odnos u drugom stepenu prenosa I0=4,57m – prenosni odnos u glavnom prenosniku l=2770mm – osovinsko rastojanje m=1730kg – masa vozila sa vozačem I prtljagom A=2,62 – čeona površina Cx=0,32 – koeficijent otpora oblikaTočkovi prednje osovine su pogonski.
Spomenute jednačine su unesene u program Simulink, gdje je pokrenut proračun, te su dobiveni dijagrami određenih dinamičkih veličina, koji će biti prikazani u nastavku, za slučaj ubrzanja i kočenja vozila.
2. UBRZANJE
Za slučaj ubrzanja, uzeto je da vozilo kreće iz stanja mirovanja, te ubrzava do 100 km/h, na suhom asfaltu, po pravolinijskoj putanji. Na sljedećim slikama, prikazani su dijagrami karakterističnih veličina u funkciji od vremena.
4
Ispitivanje dinamičkih osobina vozila
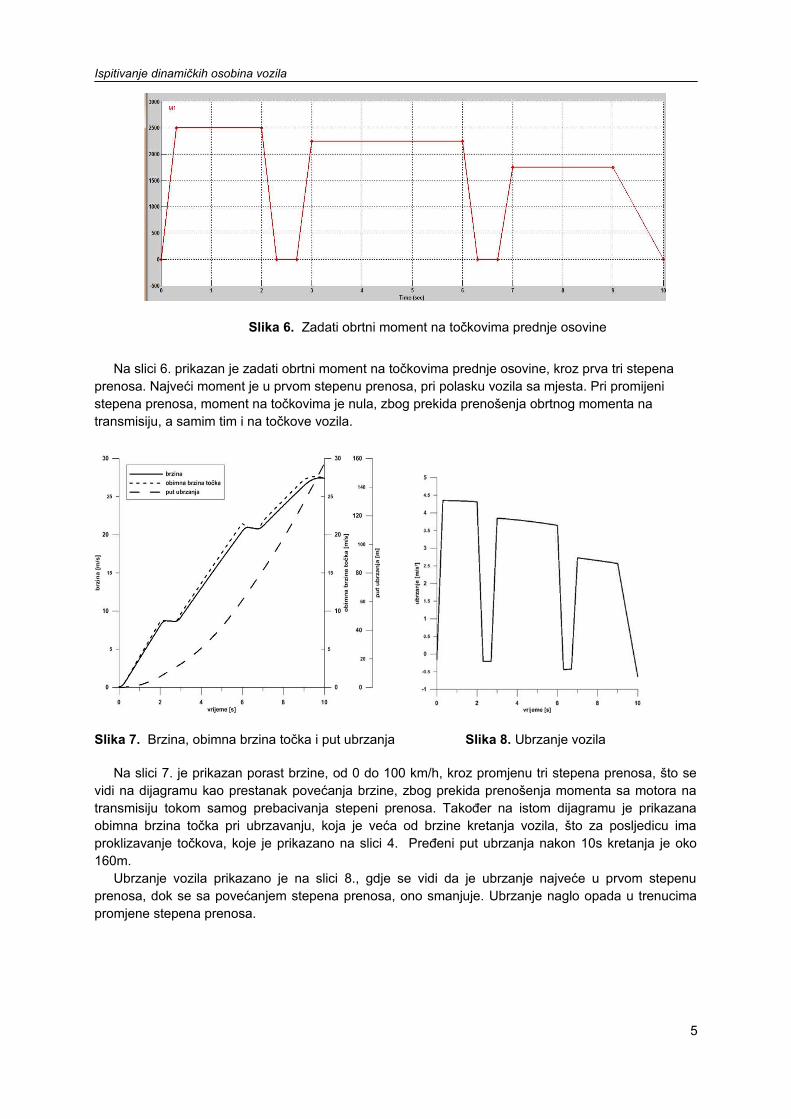
Slika 6. Zadati obrtni moment na točkovima prednje osovine
Na slici 6. prikazan je zadati obrtni moment na točkovima prednje osovine, kroz prva tri stepena prenosa. Najveći moment je u prvom stepenu prenosa, pri polasku vozila sa mjesta. Pri promijeni stepena prenosa, moment na točkovima je nula, zbog prekida prenošenja obrtnog momenta na transmisiju, a samim tim i na točkove vozila.
Slika 7. Brzina, obimna brzina točka i put ubrzanja Slika 8. Ubrzanje vozila
Na slici 7. je prikazan porast brzine, od 0 do 100 km/h, kroz promjenu tri stepena prenosa, što se vidi na dijagramu kao prestanak povećanja brzine, zbog prekida prenošenja momenta sa motora na transmisiju tokom samog prebacivanja stepeni prenosa. Također na istom dijagramu je prikazana obimna brzina točka pri ubrzavanju, koja je veća od brzine kretanja vozila, što za posljedicu ima proklizavanje točkova, koje je prikazano na slici 4. Pređeni put ubrzanja nakon 10s kretanja je oko 160m.
Ubrzanje vozila prikazano je na slici 8., gdje se vidi da je ubrzanje najveće u prvom stepenu prenosa, dok se sa povećanjem stepena prenosa, ono smanjuje. Ubrzanje naglo opada u trenucima promjene stepena prenosa.
5
Amil Damjanović, Irma Bejdić
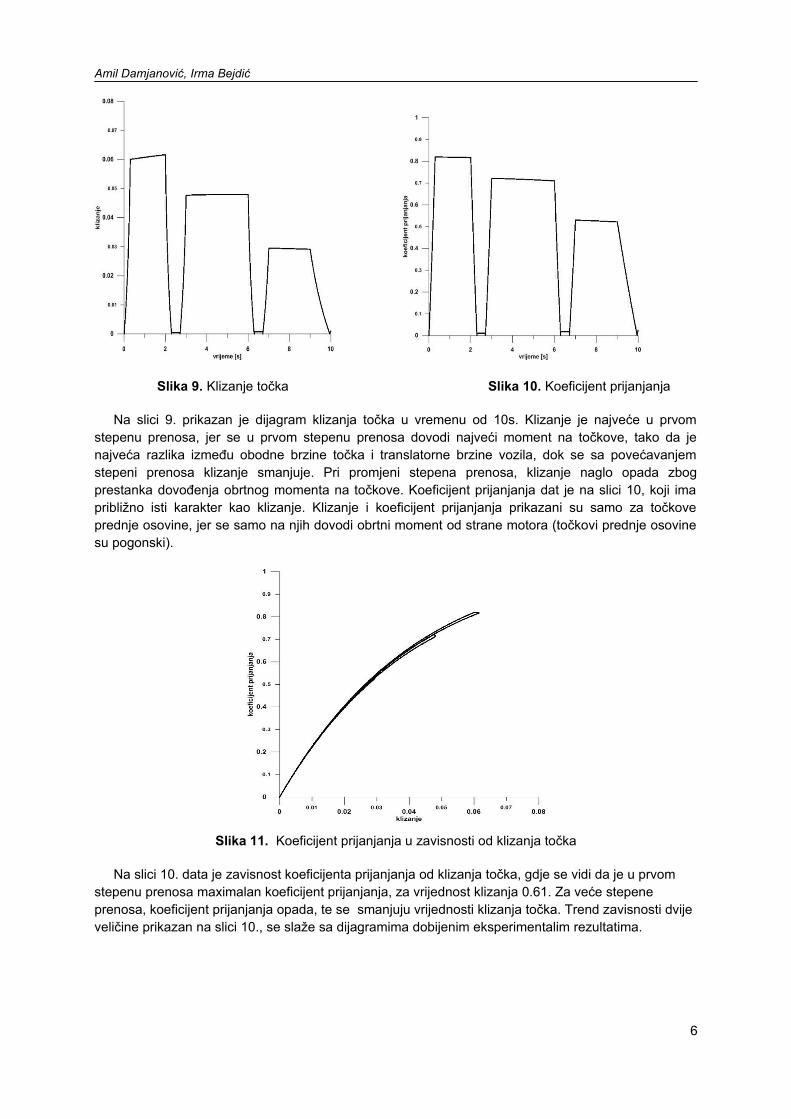
Slika 9. Klizanje točka Slika 10. Koeficijent prijanjanja
Na slici 9. prikazan je dijagram klizanja točka u vremenu od 10s. Klizanje je najveće u prvom stepenu prenosa, jer se u prvom stepenu prenosa dovodi najveći moment na točkove, tako da je najveća razlika između obodne brzine točka i translatorne brzine vozila, dok se sa povećavanjem stepeni prenosa klizanje smanjuje. Pri promjeni stepena prenosa, klizanje naglo opada zbog prestanka dovođenja obrtnog momenta na točkove. Koeficijent prijanjanja dat je na slici 10, koji ima približno isti karakter kao klizanje. Klizanje i koeficijent prijanjanja prikazani su samo za točkove prednje osovine, jer se samo na njih dovodi obrtni moment od strane motora (točkovi prednje osovine su pogonski).
Slika 11. Koeficijent prijanjanja u zavisnosti od klizanja točka
Na slici 10. data je zavisnost koeficijenta prijanjanja od klizanja točka, gdje se vidi da je u prvom stepenu prenosa maximalan koeficijent prijanjanja, za vrijednost klizanja 0.61. Za veće stepene prenosa, koeficijent prijanjanja opada, te se smanjuju vrijednosti klizanja točka. Trend zavisnosti dvije veličine prikazan na slici 10., se slaže sa dijagramima dobijenim eksperimentalim rezultatima.
6
Ispitivanje dinamičkih osobina vozila
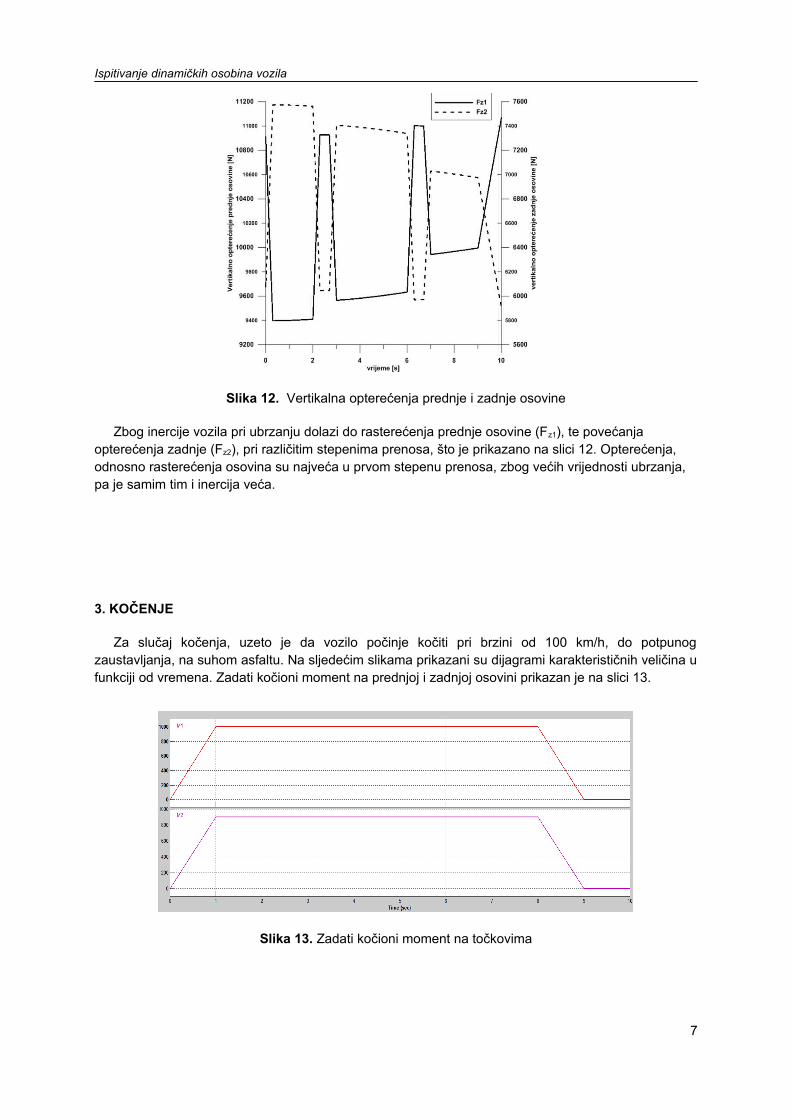
Slika 12. Vertikalna opterećenja prednje i zadnje osovine
Zbog inercije vozila pri ubrzanju dolazi do rasterećenja prednje osovine (Fz1), te povećanja opterećenja zadnje (Fz2), pri različitim stepenima prenosa, što je prikazano na slici 12. Opterećenja, odnosno rasterećenja osovina su najveća u prvom stepenu prenosa, zbog većih vrijednosti ubrzanja, pa je samim tim i inercija veća.
3. KOČENJE
Za slučaj kočenja, uzeto je da vozilo počinje kočiti pri brzini od 100 km/h, do potpunog zaustavljanja, na suhom asfaltu. Na sljedećim slikama prikazani su dijagrami karakterističnih veličina u funkciji od vremena. Zadati kočioni moment na prednjoj i zadnjoj osovini prikazan je na slici 13.
Slika 13. Zadati kočioni moment na točkovima
7
Amil Damjanović, Irma Bejdić
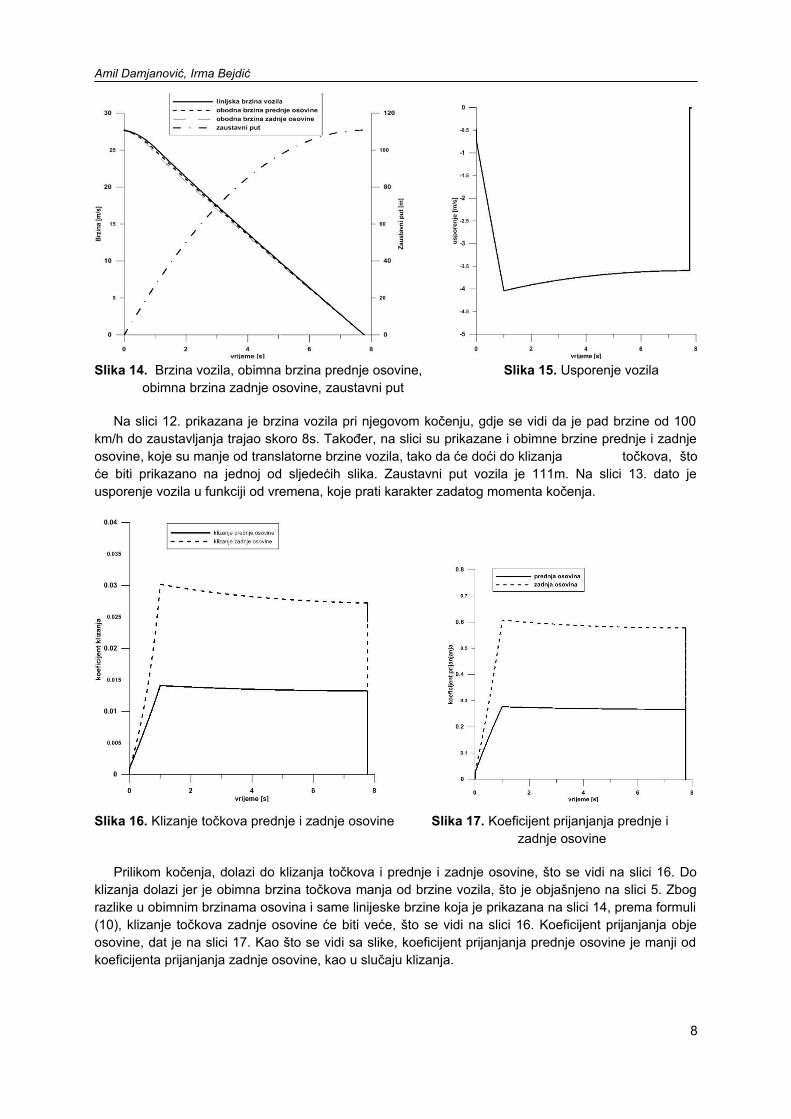
Slika 14. Brzina vozila, obimna brzina prednje osovine, Slika 15. Usporenje vozila obimna brzina zadnje osovine, zaustavni put
Na slici 12. prikazana je brzina vozila pri njegovom kočenju, gdje se vidi da je pad brzine od 100 km/h do zaustavljanja trajao skoro 8s. Također, na slici su prikazane i obimne brzine prednje i zadnje osovine, koje su manje od translatorne brzine vozila, tako da će doći do klizanja točkova, što će biti prikazano na jednoj od sljedećih slika. Zaustavni put vozila je 111m. Na slici 13. dato je usporenje vozila u funkciji od vremena, koje prati karakter zadatog momenta kočenja.
Slika 16. Klizanje točkova prednje i zadnje osovine Slika 17. Koeficijent prijanjanja prednje i zadnje osovine
Prilikom kočenja, dolazi do klizanja točkova i prednje i zadnje osovine, što se vidi na slici 16. Do klizanja dolazi jer je obimna brzina točkova manja od brzine vozila, što je objašnjeno na slici 5. Zbog razlike u obimnim brzinama osovina i same linijeske brzine koja je prikazana na slici 14, prema formuli (10), klizanje točkova zadnje osovine će biti veće, što se vidi na slici 16. Koeficijent prijanjanja obje osovine, dat je na slici 17. Kao što se vidi sa slike, koeficijent prijanjanja prednje osovine je manji od koeficijenta prijanjanja zadnje osovine, kao u slučaju klizanja.
8
Ispitivanje dinamičkih osobina vozila
Slika 18. Vertikalno opterećenje prednje i zadnje osovine
Na slici 18. prikazana je promjena vertikalnog opterećenja prednje i zadnje osovine u zavisnosti od vremena. Prilikom kočenja, zbog inercije, dolazi do opterećenja prednje osovine, a rasterećenja zadnje osovine, što se vidi na dijagramu.
Na sljedećim slikama, radi analize dinamike kretanja vozila, biti će prikazana brzina, usporenje i zaustavni put, za slučaj kočenja vozila kada kočenje vrše samo točkovi jedne osovine (prednje ili zadnje). Momenti koji su dovedeni na prednju ili zadnju osovinu, ostaju isti kao na slici 13. Karakteristične veličine su date u funkciji od vremena.
Slika 19. Brzina vozila Slika 20. Usporenje vozila
Na slici 19. data je zavisnost brzine vozila od vremena, kada koče točkovi samo prednje ili samo zadnje osovine. Sa slike se vidi da je vrijeme kočenja od 100 do 0 km/h kraće kada se koči točkovima prednje osovine, jer je zadati moment kočenja na prednjoj osovini nešto veći od momenta kočenja na zadnjoj osovini. Također jasno je da je usporenje samim tim veće pri kočenju prednjom osovinom, što je prikazano na slici 20.
9
Amil Damjanović, Irma Bejdić
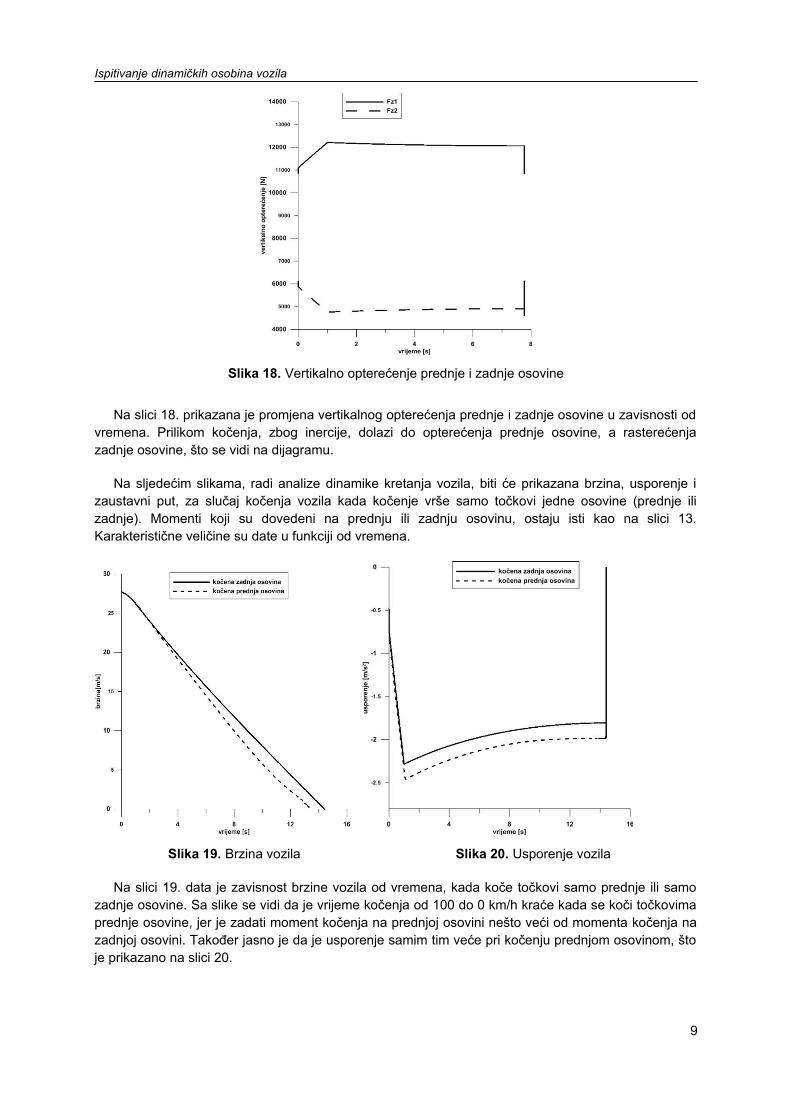
Slika 21. Zaustavni put
Zaustavni put pri kočenju vozila prikazan je na slici 21. Zaustavni put je veći prilikom kočenja vozila zadnjom osovinom, jer je zadani moment kočenja koji je doveden na točkove zadnje osovine manji.
Kočioni moment na prednjoj osovini (M1) veći je od kočionog momenta na zadnjoj osovini (M2), tako da ukoliko dođe do blokade točkova, prvo blokira prednja, a ne zadnja osovina, jer blokadom zadnje osovine dolazi do većeg zanošenja vozila, te povećane nestabilnosti, što se nastoji izbjeći. Iz ovih rezultata se može zaključiti da prilikom otkazivanja kočionog sistema na prednjoj ili zadnjoj osovini pogodnija situacija je otkazivanje na zadnjoj osovini, budući da je zaustavni put kod otkazivanja zadnje osovine kraći.
3. ZAKLJUČAK
U okviru istraživanja dinamike motornih vozila i u sklopu ovog projektnog rada trebalo je izvršiti izbor matematskog modela koji opisuje pravolinijsko kretanje vozila, kotrljanje točka i modela za proračun raspoloživog prijanjanja i na osnovu tih modela uz pomoć računarskog programa Simulink izvršiti proračun za slučaj kočenja vozila do potpunog zaustavlljanja i slučaj ubrzanja vozila do neke konačne brzine kroz više stepeni prenosa. Dobijeni dijagrami promjene određenih veličina u zavisnosti od vremena prate karakter koji je dobijen eksperimentalnim putem, te se slažu sa fizikalnošću pravolinijskog kretanja vozila. Nedostaci su uglavnom radi zanemarivanja određenih veličina koje također utiču na kretanje vozila, te zbog primjenjenih numeričkih metoda samog programa.
LITERATURA
[1] Knor, P.K. (2006). Dinamika motornih vozila. Mašinski fakultet Sarajevo
POPIS KORIŠTENIH OZNAKA
l Osovinsko rastojanje A Čeona površina vozilam Masa vozila ρ Gustina zrakacx Koeficijent otpora oblika a Rastojanje težišta od prve osovine
10





























