Embed Size (px)
Citation preview
PMF-Matematicki odsjekSveuciliste u Zagrebu
Maja Starcevic
Dinamicki sustavi
Skripta
Zagreb, 2017.

Sadrzaj
1 Dinamicki sustavi 21.1 Dinamicki sustavi i autonomni sustavi diferencijalnih jednadzbi . . . 21.2 Topolosko ekvivalentni sustavi . . . . . . . . . . . . . . . . . . . . . . 6
2 Stabilni i nestabilni potprostori 152.1 Jordanova forma matrice i rjesenje linearnog sustava jednadzbi . . . . 152.2 Prostori invarijantni na tok linearnog sustava . . . . . . . . . . . . . . 22
3 Stabilna mnogostrukost nelinearnog sustava 313.1 Lokalna stabilna i nestabilna mnogostrukost . . . . . . . . . . . . . . 323.2 Globalna stabilna i nestabilna mnogostrukost . . . . . . . . . . . . . 413.3 Lokalna topoloska ekvivalentnost sustava . . . . . . . . . . . . . . . . 47
4 Klasifikacija kriticnih tocaka 504.1 Topoloska klasifikacija kriticnih tocaka planarnog sustava . . . . . . . 504.2 Klasifikacija kriticnih tocaka na temelju svojstvenih vrijednosti . . . . 55
4.2.1 Kriticne tocke planarnog linearnog sustava . . . . . . . . . . . 564.3 Odnos kriticnih tocaka linearnih i nelinearnih sustava . . . . . . . . . 59
5 Hamiltonovi i gradijentni sustavi 665.1 Hamiltonovi sustavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 665.2 Gradijentni sustavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6 Atraktori i granicne tocke 716.1 Skupovi privlacenja i atraktori . . . . . . . . . . . . . . . . . . . . . . 716.2 Granicne tocke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7 Ciklusi autonomnog sustava 777.1 Stabilnost ciklusa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 777.2 Poincareovo preslikavanje . . . . . . . . . . . . . . . . . . . . . . . . . 797.3 Stabilna i nestabilna mnogostrukost ciklusa . . . . . . . . . . . . . . . 817.4 Egzistencija ciklusa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Literatura 87
1
Poglavlje 1
Dinamicki sustavi
1.1 Dinamicki sustavi i autonomni sustavi dife-
rencijalnih jednadzbi
Dinamicki sustav je funkcionalni opis rjesenja sustava autonomnih jednadzbi. Nekaje zadan skup pocetnih polozaja E ⊆ Rn. Dinamicki sustav prikazuje gibanje togskupa u vremenu. Preciznije definiramo:
Definicija 1.1 Neka je E ⊆ Rn otvoren skup. Dinamicki sustav na skupu E jefunkcija φ = φ(t, x) : R× E → E klase C1 za koju vrijedi
i) φ(0, x) = x , x ∈ E ;
ii) φ(t+ s, x) = φ(t, φ(s, x)) , t, s ∈ R x ∈ E .
Ako uvedemo oznaku φt(x) = φ(t, x), svojstva dinamickog sustava mozemo zapisatii kao
i) φ0 = id ,
ii) φt+s = φt ◦ φs .
Primijetimo da je ocito
(φt ◦ φs) ◦ φu = φt ◦ (φs ◦ φu) , t, s, u ∈ R .
Takoder jeφt ◦ φ−t = φ−t ◦ φt = φ0 , t ∈ R .
Neka jeΞ = {φt : t ∈ R} .
Drugo svojstvo dinamickog sustava daje nam zatvorenost skupa Ξ s obzirom nakompoziciju te je stoga (Ξ, ◦) komutativna grupa s neutralnim elementom φ0.
2

Primjer 1.1 Zadane su sljedece funkcije
a) φ : R2 → R , φ(t, x) =√|t|+ x ;
b) ψ : R\{1} × R→ R , ψ(t, x) = xt−1 ;
c) η : R2 → R , η(t, x) = 2t+ x ;
d) ξ : R2 → R , ξ(t, x) = 3t+ 2x .
Primijetimo da funkcija φ nije neprekidno diferencijabilna u tockama oblika (0, x)pa ne predstavlja dinamicki sustav.
Takoder, funkcija ψ nije definirana za sve t ∈ R pa ni ona nije dinamicki sus-tav.
Zatim imamo
η(t, η(s, x)) = 2t+ η(s, x) = 2t+ 2s+ x = 2(t+ s) + x = η(t+ s, x) .
Kako je i η(0, x) = x, funkcija η je dinamicki sustav.
Konacno, imamo ξ(0, x) 6= x pa posljednja funkcija nije dinamicki sustav.
Sada cemo prouciti vezu izmedu dinamickih sustava i autonomnih sustava dife-rencijalnih jednadzbi. Neka je zadan autonoman sustav x′ = f(x) s nepoznatomfunkcijom x = x(t). Pretpostavljamo da je f ∈ C1(E)n, gdje je E ⊆ Rn otvorenskup. Oznacimo s φ(t, x0) rjesenje sustava takvo da je φ(0, x0) = x0. Neka je sustavtakav da je za svaki x0 ∈ E rjesenje φ(·, x0) definirano na citavom R. Tada mozemoprimijeniti Svojstvo polugrupe koje smo dokazali za autonomne sustave i vidimo davrijedi
φ(t+ s, x) = φ(t, φ(s, x)) , t, s ∈ R, x ∈ E .
Prema tome funkcija φ je jedan dinamicki sustav. Primijetimo da je u tom zakljuckubitna cinjenica da je svako rjesenje definirano na citavom R sto ne vrijedi za svaki ta-kav autonomni sustav. Dakle, kod sustava koji zadovoljavaju to svojstvo dinamickisustav se formira pomocu opceg rjesenja sustava. Vrijednost funkcije dinamickogsustava u varijabli (t, x) tada predstavlja vrijednost rjesenja sustava u trenutku t, ito onog koje u pocetnom trenutku t = 0 prolazi kroz tocku x.
Primjer 1.2 Zadana je jednadzba x′ = x − 1. Neka je zadan i opceniti pocetniuvjet x(0) = x0. Jednadzbu mozemo rijesiti separacijom varijabli ili pomocu vari-jacije konstanti pri cemu trazimo rjesenje oblika x(t) = C(t)et. Tada uvrstavanjemdobivamo C ′(t)et = −1, odnosno C(t) = e−t + C1. Dakle, opce rjesenje jednadzbe
3

je x(t) = C1et + 1. Uvrstavanjem pocetnog uvjeta imamo C1 = x0− 1 pa je rjesenje
zadanog inicijalnog problema
x(t) = (x0 − 1)et + 1 .
Kako su sva rjesenja definirana na citavom R, mozemo formirati pripadni dinamickisustav koji glasi
φ : R2 → R , φ(t, x) = (x− 1)et + 1 .
Ocito je iz postupka da je φ(0, x) = x, x ∈ R, a drugo svojstvo dinamickog sustava,kao sto je prethodno spomenuto, slijedi iz Svojstva polugrupe za rjesenja autonomnogsustava.
Primjer 1.3 Neka je zadan linearan homogen sustav s konstantnom matricom, od-nosno sustav oblika x′ = Ax, gdje je A ∈ Mn(R). Sva rjesenja takvog sustavadefinirana su na citavom R. Inicijalni problem x′ = Ax, x(0) = x0 ima rjesenjex(t) = eAtx0 pa je pripadni dinamicki sustav dan s φ(t, x) = eAtx.
Ako pak pogledamo jednadzbu x′ = x2, vidimo da necemo analognim postupkomdoci do dinamickog sustava jer inicijalni problem x′ = x2 , x(0) = x0 ima rjesenje
x(t) =x0
1− x0tna maksimalnom intervalu egzistencije razlicitom od R.
Prema tome, od opceg rjesenja autonomnog sustava nije moguce uvijek formiratidinamicki sustav. Medutim, obrat ipak vrijedi. Drugim rijecima, ako je zadan nekidinamicki sustav, mozemo naci autonomni sustav cije se opce rjesenje moze opisatitim dinamickim sustavom. Naime, vrijedi sljedeci rezultat:
Teorem 1.1 Zadan je dinamicki sustav φ : R × E → E. Neka je x(t) = φ(t, x0),za neki x0 ∈ E. Tada je funkcija x rjesenje inicijalnog problema{
x′ = f(x)x(0) = x0
,
gdje je funkcija f definirana s
f(x) =∂φ
∂t(0, x) .
Dokaz. Neka je x(t) = φ(t, x0). Tada je prema prvom svojstvu dinamickog sustavax(0) = φ(0, x0) = x0. Nadalje, koristeci drugo svojstvo dinamickog sustava, imamo
dx
dt(t) =
∂
∂tφ(t, x0) =
∂
∂tφ(0 + t, x0) =
∂
∂tφ(0, φ(t, x0)) =
∂
∂tφ(0, x(t)) = f(x(t)) .
Prema tome, funkcija x je rjesenje sustava x′ = f(x). �
4

Primjer 1.4 Zadano je preslikavanje φ : R3 → R2 s
φ(t, x1, x2) =
(1
2[x1(e
4t + e−2t) + x2(e4t − e−2t)], 1
2[x1(e
4t − e−2t) + x2(e4t + e−2t)]
).
Dokazat cemo da je φ dinamicki sustav te cemo odrediti kojem autonomnom sustavuodgovara.
Za pocetak primijetimo da je φ(0, x1, x2) = (x1, x2). Dalje imamo
φ(t, φ(s, x1, x2))
= φ
(t,
1
2[x1(e
4s + e−2s) + x2(e4s − e−2s)], 1
2[x1(e
4s − e−2s) + x2(e4s + e−2s)]
).
Oznacimo
z1 =1
2[x1(e
4s + e−2s) + x2(e4s − e−2s)] ,
z2 =1
2[x1(e
4s − e−2s) + x2(e4s + e−2s)] .
Prema tome,
φ(t, φ(s, x1, x2)) = φ(t, z1, z2)
=
(1
2[z1(e
4t + e−2t) + z2(e4t − e−2t)], 1
2[z1(e
4t − e−2t) + z2(e4t + e−2t)]
)=
=
(1
2
{1
2[x1(e
4s + e−2s) + x2(e4s − e−2s)](e4t + e−2t)
+1
2[x1(e
4s − e−2s) + x2(e4s + e−2s)](e4t − e−2t)
},
1
2
{1
2[x1(e
4s + e−2s) + x2(e4s − e−2s)](e4t − e−2t)
+1
2[x1(e
4s − e−2s) + x2(e4s + e−2s)](e4t + e−2t)
})=
(1
2[x1(e
4(t+s) + e−2(t+s)) + x2(e4(t+s) − e−2(t+s))],
1
2[x1(e
4(t+s) − e−2(t+s)) + x2(e4(t+s) + e−2(t+s))]
)= φ(t+ s, x1, x2) .
Dakle, funkcija φ zadovoljava sva svojstva dinamickog sustava te je stoga mogucenaci autonomni sustav kojem odgovara. Taj sustav je dan s x′ = f(x), za x =(x1, x2), gdje je
f(x) =∂φ
∂t(0, x1, x2)
5

= (x1(2e4t − e−2t) + x2(2e
4t + e−2t), x1(2e4t + e−2t) + x2(2e
4t − e−2t))|t=0
= (x1 + 3x2, 3x1 + x2) .
Dakle, za svaki (x(0)1 , x
(0)2 ) ∈ R2 funkcija definirana s x(t) = φ(t, x
(0)1 , x
(0)2 ) rjesenje
je inicijalnog problema x′1 = x1 + 3x2x′2 = 3x1 + x2x1(0) = x
(0)1 , x2(0) = x
(0)2
.
1.2 Topolosko ekvivalentni sustavi
U ovom potpoglavlju proucavamo sustave koji se ne razlikuju puno u kvalitativnomsmislu.
Definicija 1.2 Neka su E1 i E2 otvoreni skupovi u Rn te neka je f ∈ C1(E1)n i g ∈
C1(E2)n. Za dva sustava x′ = f(x) i x′ = g(x) kazemo da su topolosko ekvivalentni
ako postoji homeomorfizam H : E1 → E2 (neprekidna bijekcija) koji orbite prvogsustava preslikava u orbite drugog sustava te pritom cuva njihovu orijentaciju.
Neka je φ = φ(t, x) rjesenje prvog sustava (koje u t = 0 ima vrijednost x). Analognooznacimo s ψ = ψ(t, x) rjesenje drugog sustava koje u t = 0 ima vrijednost x. Nekaje τ = τ(t) funkcija koja opisuje odnos parametrizacija rjesenja φ i ψ i to takva daje τ(0) = 0. Tocka φ(t, x) se tada preslikava u tocku ψ(τ(t), H(x)) drugog sustava.Dakle vrijedi
H(φ(t, x)) = ψ(τ(t), H(x)) .
Funkcija τ = τ(t) je strogo rastuca jer mora biti sacuvana orijentacija, odnosnovrijedi
dτ
dt(t) > 0 .
Prisjetimo se da iz faznog dijagrama ne mozemo ocitati tocne vrijednosti rjesenja unekom trenutku, vec nam dijagram daje samo pregled vrijednosti koje rjesenje kojeprolazi kroz zadanu tocku moze poprimiti.
Ako pomocu homeomorfizma promijenimo fazni dijagram, ne mozemo vise ocitatini tocan skup vrijednosti rjesenja, ali ipak vidimo neke karakteristike rjesenja. Npr.homeomorfizam ce zatvorene orbite preslikati u zatvorene orbite tako da i iz modi-ficiranog dijagrama mozemo ocitati da sustav ima periodicko rjesenje.
6

Primjer 1.5 Pogledajmo sustav {x′ = yy′ = −x .
Znamo da su sve netrivijalne orbite sustava kruznice x2 + y2 = C, C > 0 (slika1.1). Primijenimo sada homeomorfizam H(x, y) = (2x, 3y). Rjesenja sustava cemo
Slika 1.1.
preslikati u rjesenja novog sustava na sljedeci nacin. Za rjesenje drugog sustava(x, y) vrijedi
x(t) = 2x(t) , y(t) = 3y(t) .
Tada imamox2
4+y2
9= 1 ,
odnosno sve netrivijalne orbite sustava su elipse (slika 1.2). Kako je
x′(t) = 2x′(t) = 2y(t) =2
3y(t) ,
y′(t) = 3y′(t) = −3x(t) = −3
2x(t) ,
vidimo da je pripadni sustav, koji je topolosko ekvivalentan zadanom, jednak{x′ = 2
3y
y′ = −32x.
Napomena 1.1 Primijetimo da smo u prethodnom zadatku preslikali rjesenja bezmodifikacije varijable vremena. Za tako postavljene topolosko ekvivalentne sustavekazemo da su i topolosko konjugirani.
7
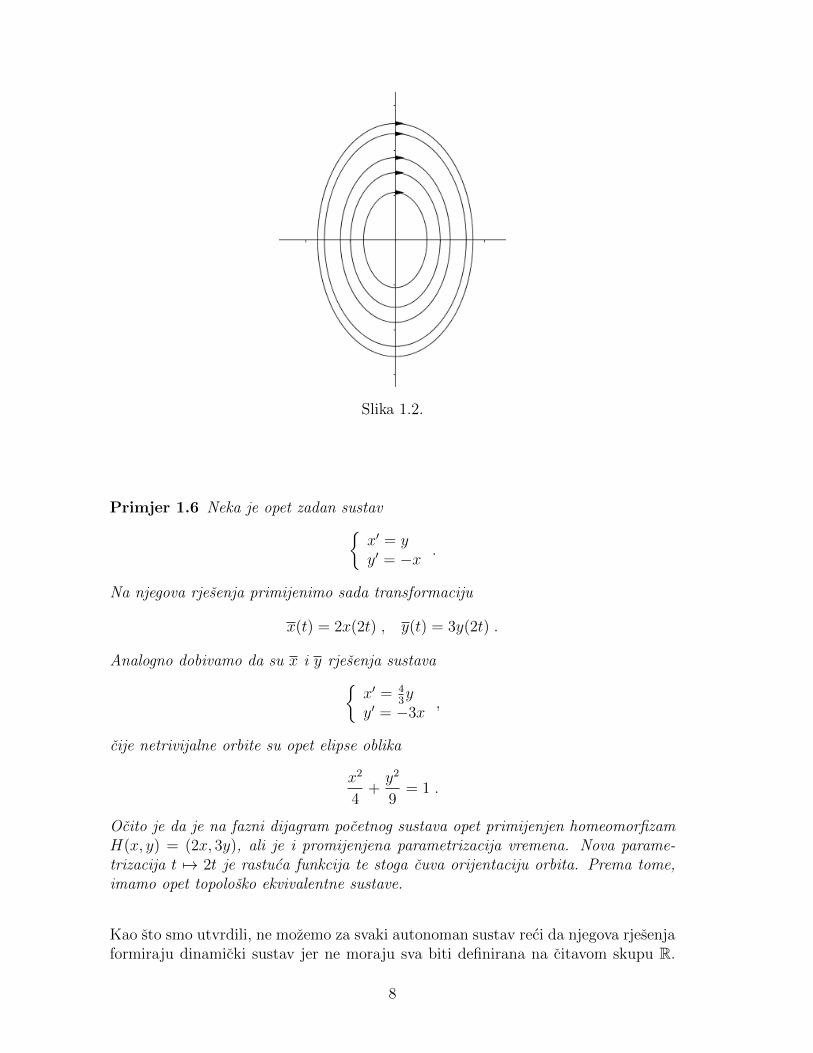
Slika 1.2.
Primjer 1.6 Neka je opet zadan sustav{x′ = yy′ = −x .
Na njegova rjesenja primijenimo sada transformaciju
x(t) = 2x(2t) , y(t) = 3y(2t) .
Analogno dobivamo da su x i y rjesenja sustava{x′ = 4
3y
y′ = −3x,
cije netrivijalne orbite su opet elipse oblika
x2
4+y2
9= 1 .
Ocito je da je na fazni dijagram pocetnog sustava opet primijenjen homeomorfizamH(x, y) = (2x, 3y), ali je i promijenjena parametrizacija vremena. Nova parame-trizacija t 7→ 2t je rastuca funkcija te stoga cuva orijentaciju orbita. Prema tome,imamo opet topolosko ekvivalentne sustave.
Kao sto smo utvrdili, ne mozemo za svaki autonoman sustav reci da njegova rjesenjaformiraju dinamicki sustav jer ne moraju sva biti definirana na citavom skupu R.
8

Medutim, kako je za analizu sustava i njegovih rjesenja ponekad dovoljno poznavatisamo fazni dijagram, odnosno vrijednosti koje rjesenja sustava poprimaju, mozemopromatrati i neki sustav koji je topolosko ekvivalentan zadanom sustavu. U nas-tavku cemo pokazati da se svakom autonomnom sustavu moze pridruziti topoloskoekvivalenti sustav cija su rjesenja definirana na citavom R, a fazni dijagram mu jeu potpunosti identican faznom dijagramu zadanog sustava. Drugim rijecima, home-omorfizam H je u ovom slucaju identiteta. O tome govori sljedeci teorem.
Teorem 1.2 (O globalnoj egzistenciji) Neka je f ∈ C1(Rn)n. Rjesenja inicijal-nog problema
x′ =1
1 + ||f(x)||· f(x) , (1.1)
x(0) = x0 (1.2)
definirana su na citavom R i taj sustav je topolosko ekvivalentan sustavu
x′ = f(x) . (1.3)
Prije dokaza teorema dokazimo jedan pomocni rezultat:
Lema 1.1 Ako je funkcija f : Rn → Rn klase C1, onda je i funkcija F : Rn → Rn,definirana s
F (x) =1
1 + ||f(x)||· f(x) ,
klase C1.
Dokaz. Primijetimo da je F = g ◦ f , gdje je g : Rn → Rn zadana s
g(x) =1
(1 + ||x||)· x .
Dovoljno je dokazati da je funkcija g klase C1. Neka je i ∈ {1, . . . , n}. Za x 6= 0 je
∂gj∂xi
(x) =||x||(1 + ||x||)− x2i||x||(1 + ||x||)2
ako je j = i te je∂gj∂xi
(x) = − xixj||x||(1 + ||x||)2
ako je j 6= i.
S druge strane, ako je x = 0 imamo
∂gj∂xi
(0) = limh→0
gi(hei)− gi(0)
||h||= 1
9

za j = i te je∂gj∂xi
(0) = limh→0
gj(hei)− gj(0)
||h||= 0
za j 6= i.
Sada dokazimo neprekidnost parcijalnih derivacija funkcije g. Imamo prvo za j = i∣∣∣∂gj∂xi(x)− ∂gj
∂xi(0)∣∣∣ =
||x||2 + x2i + ||x||3
||x||(1 + ||x||)2≤ ||x||
2 + x2i + ||x||3
||x||
≤ 2||x||2 + ||x||3
||x||≤ 2||x||+ ||x||2
pa je
limx→0
∂gj∂xi
(x) =∂gj∂xi
(0) .
Takoder je za j 6= i∣∣∣∂gj∂xi(x)− ∂gj
∂xi(0)∣∣∣ =
|xixj|||x||(1 + ||x||)2
≤x2i + x2j
2||x||(1 + ||x||)2
≤ ||x||2
||x||(1 + ||x||)2≤ ||x||
te je opet
limx→0
∂gj∂xi
(x) =∂gj∂xi
(0) .
�
Sada se vratimo na dokaz teorema:
Dokaz teorema 1.2. Prvo cemo dokazati da su rjesenja inicijalnog problema (1.1)-(1.2) definirana na R. Prema lemi 1.1 i desna strana sustava (1.1) je funkcija klaseC1. Nadalje vidimo da vrijedi
x(t) = x0 +
∫ t
0
1
1 + ||f(x(s))||· f(x(s))ds .
Zbog ogranicenosti podintegralne funkcije je
||x(t)|| ≤ ||x0||+ |t| .
Pretpostavimo sada da je maksimalni interval egzistencije rjesenja x podskup od[−a, a]. Tada vrijedi
||x(t)|| ≤ ||x0||+ a
pa je rjesenje ograniceno na svom maksimalnom intervalu egzistencije. Prema Te-oremu o apriornim ocjenama definirano je na citavom intervalu [−a, a]. Konacno,
10

varirajuci a dobivamo rjesenje na R.
U nastavku dokazujemo da su sustavi (1.1) i (1.3) topolosko ekvivalentni. Ho-meomorfizam koji pritom koristimo za preslikavanje faznog dijagrama sustava (1.3)u fazni dijagram sustava (1.1) je identiteta. Drugim rijecima, ne mijenjamo slikurjesenja, vec samo domenu. Neka je dakle x = x(t) neko rjesenje sustava x′ = f(x).Definirajmo sada x(τ) = x(t), gdje je
τ(t) =
∫ t
0
(1 + ||f(x(s))||)ds .
Primijetimo da parametrizacija τ ovisi o izboru rjesenja prvog sustava.
Sada imamo
∂x(τ)
∂τ=∂x(τ)
∂t
∂t(τ)
∂τ=∂x(τ)
∂t(1 + ||f(x(t))||)−1
=∂x(t)
∂t(1 + ||f(x(t))||)−1 = f(x(t))(1 + ||f(x(t))||)−1
=1
1 + ||f(x(τ))||· f(x(τ)) .
Prema tome, x = x(τ) je rjesenje sustava (1.1).
Slike rjesenja x i x su jednake, odnosno pripadne orbite se podudaraju. Kako tovrijedi za svako rjesenje x sustava (1.3), fazni dijagram tog sustava podudara se sfaznim dijagramom sustava (1.1). Kako je za svako rjesenje x
dτ(t)
dt= 1 + ||f(x(t))|| > 0 ,
preslikavanjem orbite po zadanom pravilu, cuvamo i njezinu orijentaciju. Dakle,sustavi (1.1) i (1.3) su topolosko ekvivalentni. �
Napomena 1.2 Sustav (1.1) nije jedini sustav koji je topolosko ekvivalentan sus-tavu x′ = f(x) i definira dinamicki sustav. Jos neki sustavi koji su mu topoloskoekvivalentni su npr. sustavi
x′ =1
1 + 2||f(x)||· f(x)
te
x′ =1
1 + ||f(x)||2· f(x) .
I za te sustave je moguce dokazati da im se fazni dijagrami podudaraju s faznimdijagramom sustava x′ = f(x).
11

Napomena 1.3 U teoremu 1.2 pretpostavljamo da je f ∈ C1(Rn)n. I za opcenitijefunkcije f ∈ C1(E)n, gdje je E ⊂ Rn otvoren, mozemo naci topolosko ekvivalentnisustav koji definira dinamicki sustav. Sustav se razlikuje od onog iz teorema 1.2 idokaz je dosta slozeniji. Ipak, homeomorfizam koji se koristi je i dalje identiteta, stoznaci da i u ovom slucaju dobivamo fazni dijagram potpuno identican pocetnom.
Primjer 1.7 Zadana je jednadzba x′ = 3x3. Promotrimo pripadni inicijalni pro-blem {
x′ = 3x3
x(0) = x0.
Jednadzbu mozemo rijesiti separacijom varijabli x−3dx = 3dt. Dobivamo
−1
2x−2 = 3t+ C .
Uvrstavanjem pocetnog uvjeta x(0) = x0 slijedi
C = − 1
2x20
pa konacno imamo
x(t) =
(−6t+
1
x20
)−1/2.
Ova funkcija je definirana samo za t ∈⟨−∞, 1
6x20
⟩Kako funkcije x nisu definirane
na citavom R (osim za x0 = 0 kad je x ≡ 0), zadana jednadzba ne daje dinamickisustav. Medutim, prema Teoremu o globalnoj egzistenciji mozemo napraviti modifi-kaciju jednadzbe da postignemo dinamicki sustav. Radi se o jednadzbi
x′ =3x3
1 + 3|x|3.
Njena rjesenja su prema Teoremu o globalnoj egzistenciji definirana na R. Pritom sekoristi samo transformacija parametrizacije rjesenja prve jednadzbe. Preslikavanjeorbita se dakle vrsi po pravilu x(τ) = x(t), gdje je
τ(t) =
∫ t
0
(1 + 3
∣∣∣∣−6s+1
x20
∣∣∣∣−3/2)ds .
Pritom je t < 16x0
, odnosno −6s+ 1x20> 0 pa mozemo pisati i
τ(t) =
∫ t
0
(1 + 3
(−6s+
1
x20
)−3/2)ds .
Uz supstituciju u = −6s+ 1x20
imamo
τ(t) = −1
6
∫ −6t+1/x20
1/x20
(1 + 3u−3/2)du = −1
6(u− 6u−1/2)|−6t+1/x20
1/x20
12

=1
6
[6t+ 6(−6t+ 1/x20)
−1/2 − 6|x0|].
Primjecujemo da vrijedi, kao sto nam i osigurava Teorem o globalnoj egzistenciji,
limt→−∞
τ(t) = −∞ ,
limt→ 1
6x20
−τ(t) = +∞ .
Prema tome, iako nije bilo potrebno, napravili smo modifikaciju vremena lijevo odpocetnog trenutka t = 0. Ono sto je vaznije je da je desni interval egzistencijefunkcija x jednak [0,+∞〉.
Primjer 1.8 Zadan je sustav {x′ = x2
y′ = x+ y
Znamo otprije da inicijalni problem{x′ = x2
x(0) = x0(1.4)
nema rjesenje na citavom skupu R. Prema tome, ni zadani sustav zajedno s pocetnimuvjetom x(0) = x0, y(0) = y0 nema rjesenje na R. Medutim, prema Teoremu o glo-balnoj egzistenciji, znamo da postoji sustav koji je topolosko ekvivalentan zadanom,i koji definira dinamicki sustav.
Za pocetak, rjesenje inicijalnog problema (1.4) je
x(t) =x0
1− x0t.
Uvrstavanjem u drugu jednadzbu dobivamo
y′ = y +x0
1− x0t.
Rjesenje trazimo u obliku y(t) = C(t)et pa iz jednadzbe dobivamo
C ′(t)et =x0
1− x0t
te je
C(t) =
∫ t
0
e−sx01− x0s
ds+ C1 .
13

Pocetni uvjet y(0) = y0 daje C(0) = C1 = y0 pa konacno imamo
y(t) =
(∫ t
0
e−sx01− x0s
ds+ y0
)et .
Funkcije x i y su definirane na intervalu 〈−∞, 1x0〉, ako je x0 > 0, odnosno na in-
tervalu 〈 1x0,∞〉, za x0 < 0.
Trazeni topolosko ekvivalentni sustav jednak je x′ = x2
1+√x4+(x+y)2
y′ = x+y
1+√x4+(x+y)2
.
Odnos parametrizacija je dan s
τ(t) =
∫ t
0
(1 +√
(x(s))4 + (x(s) + y(s))2ds
=
∫ t
0
1 +
√(x0
1− x0s
)4
+
(x0
1− x0s+
(∫ s
0
e−ux0
1− x0udu+ y0
)es)2 ds .
14
Poglavlje 2
Stabilni i nestabilni potprostori
2.1 Jordanova forma matrice i rjesenje linearnog
sustava jednadzbi
U ovom poglavlju cilj je prouciti stabilne i nestabilne potprostore linearnog sustava skonstantnom matricom sustava, odnosno sustava oblika x′ = Ax. Spomenut cemo icentralni potprostor istog sustava koji u direktnoj sumi s prethodna dva potprostoradaje citav prostor Rn. Da bismo mogli definirati te pojmove, moramo poznavati bazugeneraliziranih svojstvenih vektora matrice A. Za pocetak imamo sljedecu definiciju:
Definicija 2.1 Generalizirani svojstveni vektor matrice A pridruzen svojstvenoj vri-jednosti λ je vektor v za koji je (A − λI)kv = 0 za neki k ∈ N. Ako je pritom(A− λI)rv 6= 0, 0 ≤ r < k, kazemo da je v ranga k.
Napomena 2.1 Ako je generalizirani svojstveni vektor v ranga 1, onda je v svoj-stveni vektor matrice A. U slucaju realne svojstvene vrijednosti, uzimamo u obzirsamo realne generalizirane svojstvene vektore.
Oznacimo s G(λ) potprostor generiran generaliziranim svojstvenim vektorima ma-trice A pridruzenim svojstvenoj vrijednosti λ. Ako su λ1, . . . , λm sve razlicite svoj-stvene vrijednosti matrice A, imamo
G(λ1)u · · ·uG(λm) = Mn1(C) .
Drugim rijecima, imamo sljedeci rezultat:
Teorem 2.1 Neka matrica A ∈ Mn(R) ima k realnih svojstvenih vrijednosti λi,i = 1, . . . , k i 2r kompleksnih svojstvenih vrijednosti µj, µj, j = 1, . . . , r pri cemuje k + 2r = n. Tada postoji baza prostora Mn1(C) sastavljena od generaliziranihsvojstvenih vektora matrice A, preciznije vektora vi, i = 1, . . . , k (koji su pridruzenisvojstvenim vrijednostima λi) te vektora wj, wj, j = 1, . . . , r (pridruzenih svojstve-nim vrijednostima µj, µj).
15

Baza iz prethodnog teorema je sastavljena od opcenito kompleksnih stupaca. Mozemoju konstruirati od vektora koji cine Jordanove lance. Pomocu te baze mozemo zatimdobiti i bazu za prostor Mn1(R):
Teorem 2.2 Neka je {v1, . . . , vk, w1, w1, . . . , wr, wr} baza iz Teorema 2.1. Neka jewj = uj + izj, uj, zj ∈Mn1(R), j = 1, . . . , r. Tada je skup
{v1, . . . , vk, u1, z1, . . . , ur, zr}
baza prostora Mn1(R),
Dakle, bazu smo dobili od svih realnih generaliziranih svojstvenih vektora, te svihrealnih i imaginarnih dijelova kompleksnih generaliziranih svojstvenih vektora kojicine bazu za Mn1(C). Neka je dana matrica prijelaza
P = [v1, . . . , vk, z1, u1, . . . , zr, ur] .
Primijetimo da smo imaginarne dijelove generaliziranih svojstvenih vektora u matriciprijelaza zapisali prije pripadnih realnih dijelova. Tada vrijedi A = PJP−1, gdje jeJ Jordanova kanonska forma
J = diag(J1, . . . , Jp) .
Preciznije J je blok-dijagonalna matrica s blokovima J1, . . . , Jp, pri cemu je svakiblok pridruzen razlicitoj svojstvenoj vrijednosti i oblika je
Jj = diag(Bj1, . . . , Bjrj) ,
tj. opet se radi o blok-dijagonalnoj matrici. Svi blokovi u matrici Jj su pridruzeniistoj svojstvenoj vrijednosti i svaki od njih je ili oblika
λ 1 0 . . . 0 00 λ 1 . . . 0 00 0 λ . . . 0 0...
......
. . ....
...0 0 0 . . . λ 10 0 0 . . . 0 λ
, (2.1)
u slucaju da je pridruzen realnoj svojstvenoj vrijednosti λ, ili oblika
D I 0 . . . 0 00 D I . . . 0 00 0 D . . . 0 0...
......
. . ....
...0 0 0 . . . D I0 0 0 . . . 0 D
, (2.2)
gdje je
D =
(a −bb a
),
16

a I jedinicna matrica reda 2, u slucaju da je pridruzen kompleksnoj svojstvenojvrijednosti λ = a+ ib, b 6= 0.
Nadalje, ako je blok (2.1) duljine m, onda eksponencijalna matricna funkcija kojamu je pridruzena ima vrijednost
eλt
1 t t2
2!. . . tm−2
(m−2)!tm−1
(m−1)!0 1 t . . . tm−3
(m−3)!tm−2
(m−2)!0 0 1 . . . tm−4
(m−4)!tm−3
(m−3)!...
......
. . ....
...0 0 0 . . . 1 t0 0 0 . . . 0 1
.
Takoder, ako je blok (2.2) duljine 2m, onda eksponencijalna matricna funkcija kojamu je pridruzena ima vrijednost
eat
R tR t2
2!R . . . tm−2
(m−2)!Rtm−1
(m−1)!R
0 R tR . . . tm−3
(m−3)!Rtm−2
(m−2)!R
0 0 R . . . tm−4
(m−4)!Rtm−3
(m−3)!R...
......
. . ....
...0 0 0 . . . R tR0 0 0 . . . 0 R
,
gdje je
R =
(cos(bt) − sin(bt)sin(bt) cos(bt)
).
Prethodne formule mozemo iskoristiti za rjesavanje inicijalnog problema x′ = Ax,x(0) = x0. Rjesenje je dano s x(t) = eAtx0, pri cemu vrijedi eAt = PeJtP−1. Na-dalje, vrijedi i eJt = diag(eJ1t, . . . , eJpt) te eJjt = diag(eBj1t, . . . , eBjrj
t), j = 1, . . . , p.
Primjer 2.1 Zadan je sustav
x′ =
2 2 31 3 3−1 −2 −2
x .
Ako oznacimo matricu sustava s A, imamo
det(A− λI) =
∣∣∣∣∣∣2− λ 2 3
1 3− λ 3−1 −2 −2− λ
∣∣∣∣∣∣ =
∣∣∣∣∣∣0 −λ2 + 5λ− 4 3λ− 31 3− λ 30 1− λ 1− λ
∣∣∣∣∣∣= (λ− 1)2
∣∣∣∣∣∣0 −(λ− 4) 31 3− λ 30 −1 −1
∣∣∣∣∣∣ = −(λ− 1)2∣∣∣∣ −λ+ 4 3−1 −1
∣∣∣∣ = −(λ− 1)3 .
17

Dakle, matrica A ima trostruku svojstvenu vrijednost 1. Pronadimo svojstveni pot-prostor pridruzen toj svojstvenoj vrijednosti. Imamo
A− I =
1 2 31 2 3−1 −2 −3
.
Matrica A− I je ranga 1 te je Ker(A− I) = VA(1) = [{b1, b2}] gdje je
b1 =
2−1
0
, b2 =
30−1
.
Kako je geometrijska kratnost svojstvene vrijednosti 1 jednaka 2, Jordanova formaglasi
J =
1 0 00 1 10 0 1
.
Matrica prijelaza je matrica P = [v1 v2 v3], gdje su v1, v2 ∈ Ker(A − I). IzJordanove forme citamo da vrijedi
Av1 = v1 , Av2 = v2 , Av3 = v2 + v3 .
Iz Av3 = v2 + v3 dobivamo (A − I)v3 = v2. Zapisimo vektor v2 u obliku v2 =α1b1 + α2b2, odnosno u bazi za Ker(A− I). Tada dobivamo sustav 1 2 3 | 2α1 + 3α2
1 2 3 | −α1
−1 −2 −3 | −α2
=
1 2 3 | 2α1 + 3α2
0 0 0 | −3α1 − 3α2
0 0 0 | 2α1 + 2α2
. (2.3)
Dakle, sustav ima rjesenje ako i samo ako je α2 = −α1. Uzmimo npr. α1 = 1,α2 = −1. Prema tome,
v2 =
−1−1
1
.
Uzmimo neki vektor koji zadovoljava sustav (2.3), npr.
v3 =
−100
.
Konacno, uzmimo v1 ∈ Ker(A− I), linearno nezavisan s v2, npr.
v1 =
2−1
0
.
18
Dakle, matrica prijelaza je
P =
2 −1 −1−1 −1 0
0 1 0
.
Racunamo inverz matrice P : 2 −1 −1 | 1 0 0−1 −1 0 | 0 1 0
0 1 0 | 0 0 1
∼ 0 −3 −1 | 1 2 0−1 −1 0 | 0 1 0
0 1 0 | 0 0 1
0 0 −1 | 1 2 3−1 0 0 | 0 1 1
0 1 0 | 0 0 1
∼ 1 0 0 | 0 −1 −1
0 1 0 | 0 0 10 0 1 | −1 −2 −3
.
Dakle,
P−1 =
0 −1 −10 0 1−1 −2 −3
.
Iz A = PJP−1 imamo eAt = PeJtP−1, odnosno
eAt =
2 −1 −1−1 −1 0
0 1 0
et 0 00 et tet
0 0 et
0 −1 −10 0 1−1 −2 −3
= et
t+ 1 2t 3tt 1 + 2t 3t−t −2t 1− 3t
.
Primjer 2.2 Rijesit cemo sustav x′ = Ax, gdje je
A =
0 −1 1 14 0 0 10 0 0 −10 0 4 0
.
Lako je vidjeti da je karakteristicni polinom kA(λ) = (λ2 + 4)2, pa imamo dvijedvostruke svojstvene vrijednosti ±2i. Odredimo svojstveni potprostor od 2i. Kako je
A− (2i)I =
−2i −1 1 1
4 −2i 0 10 0 −2i −10 0 4 −2i
∼−2i −1 1 1
0 0 −2i 1− 2i0 0 −2i −10 0 0 0
∼
−2i −1 1 1
0 0 −2i 1− 2i0 0 0 −2 + 2i0 0 0 0
,
19

imamo VA(2i) = [{w1}], gdje je
w1 =
1
−2i00
.
Sada nadimo w2 takav da je w2 ∈ Ker(A− (2i)I)2\Ker(A− (2i)I), tj. trazimo w2
takav da je (A− (2i)I)w2 = w1. Stoga rjesavamo sustav−2i −1 1 1 | 1
4 −2i 0 1 | −2i0 0 −2i −1 | 00 0 4 −2i | 0
∼−2i −1 1 1 | 1
0 0 −2i 1− 2i | −4i0 0 −2i −1 | 00 0 0 0 | 0
∼
−2i −1 1 1 | 1
0 0 −2i 1− 2i | −4i0 0 0 −2 + 2i | 4i0 0 0 0 | 0
.
Rjesenje sustava je
w2 =
0
12(1− i)
12(1 + i)1− i
.
Sustavu je pridruzena Jordanova forma0 −2 1 02 0 0 10 0 0 −20 0 2 0
.
Kako je
w1 =
1000
+ i
0−2
00
, w2 =
0
1/21/2
1
+ i
0
−1/21/2−1
,
matrica prijelaza je jednaka
P =
0 1 0 0−2 0 −1/2 1/2
0 0 1/2 1/20 0 −1 1
.
Racunamo njezin inverz0 1 0 0 | 1 0 0 0−2 0 −1/2 1/2 | 0 1 0 0
0 0 1/2 1/2 | 0 0 1 00 0 −1 1 | 0 0 0 1
∼
0 1 0 0 | 1 0 0 0−2 0 0 0 | 0 1 0 −1/2
0 0 0 1 | 0 0 1 1/20 0 −1 1 | 0 0 0 1
20
∼
0 1 0 0 | 1 0 0 0−2 0 0 0 | 0 1 0 −1/2
0 0 0 1 | 0 0 1 1/20 0 −1 0 | 0 0 −1 1/2
∼
1 0 0 0 | 0 −1/2 0 1/40 1 0 0 | 1 0 0 00 0 1 0 | 0 0 1 −1/20 0 0 1 | 0 0 1 1/2
.
Dakle, inverz matrice P je jednak0 −1/2 0 1/41 0 0 00 0 1 −1/20 0 1 1/2
.
Rjesenje sustava je tada oblika x(t) = eAtx0, gdje je
eAt = PeJtP−1
=
0 1 0 0−2 0 −1/2 1/2
0 0 1/2 1/20 0 −1 1
cos(2t) − sin(2t) t cos(2t) −t sin(2t)sin(2t) cos(2t) t sin(2t) t cos(2t)
0 0 cos(2t) − sin(2t)0 0 sin(2t) cos(2t)
×
×
0 −1/2 0 1/41 0 0 00 0 1 −1/20 0 1 1/2
=
sin(2t) cos(2t) t sin(2t) t cos(2t)
−2 cos(2t) 2 sin(2t) −2t cos(2t)− 12
cos(2t) + 12
sin(2t) 2t sin(2t) + 12
sin(2t) + 12
cos(2t)0 0 1
2cos(2t) + 1
2sin(2t) −1
2sin(2t) + 1
2cos(2t)
0 0 − cos(2t) + sin(2t) sin(2t) + cos(2t)
×
×
0 −1/2 0 1/41 0 0 00 0 1 −1/20 0 1 1/2
=
cos(2t) −1
2sin(2t) t sin(2t) + t cos(2t) 1
4sin(2t)− 1
2t sin(2t) + 1
2t cos(2t)
2 sin(2t) cos(2t) −2t cos(2t) + 2t sin(2t) + sin(2t) t cos(2t) + t sin(2t)0 0 cos(2t) −1
2sin(2t)
0 0 2 sin(2t) cos(2t)
.
21

2.2 Prostori invarijantni na tok linearnog sustava
Pomocu baze iz prethodnog potpoglavlja definirat cemo neke prostore koji su inva-rijantni na tok sustava x′ = Ax. Za pocetak definiramo skupove koji imaju tosvojstvo.
Definicija 2.2 Kazemo da je skup S ⊆ Rn invarijantan na tok sustava x′ = f(x),ako za svaki x0 ∈ S vrijedi φ(t, x0) ∈ S, t ∈ R.
Drugim rijecima, skup S je invarijantan na tok sustava ako se orbita kojoj je nekatocka u S u potpunosti nalazi u S. U prethodnoj definiciji se podrazumijeva dasmo sustav x′ = f(x), ukoliko mu rjesenja nisu definirana na citavom R, zamijenilis prikladnim topolosko ekvivalentnim sustavom. Specijalno, ako je sustav zadan sx′ = Ax, skup S je invarijantan na tok sustava ako je eAtx0 ∈ S za svaki t ∈ R ix0 ∈ S.
Definicija 2.3 Tocka x0 neke orbite sustava x′ = f(x) razdvaja orbitu na dvijepoluorbite (lijevu i desnu). Desna orbita je je jednaka skupu {φ(t, x0) : t > 0}, dokje lijeva skup {φ(t, x0) : t < 0}.Ako za svaki x0 ∈ S vrijedi φ(t, x0) ∈ S, t > 0 (odnosno ako je desna poluorbitaorbite koja prolazi kroz x0 u S), onda je S pozitivno invarijantan na tok, a ako zasvaki x0 ∈ S vrijedi φ(t, x0) ∈ S, t < 0, onda je S negativno invarijantan na toksustava.
Trivijalni invarijantni potprostori sustava x′ = Ax su naravno Rn i {0}. Medutim,za neke takve sustave postoje i netrivijalni invarijantni potprostori. Njih definiramopomocu generaliziranih svojstvenih vektora matrice A. Imamo sljedecu definiciju.
Definicija 2.4 Neka je B = {v1, . . . , vk, u1, z1, . . . , ur, zr} baza za Rn koju dobi-vamo pomocu baze generaliziranih svojstvenih vektora matrice A. Tada je stabilanpotprostor linearnog sustava x′ = Ax prostor generiran pomocu svih vektora iz Bkoji pripadaju svojstvenim vrijednostima matrice A kojima je realni dio manji odnule. Vektori iz B koji odgovaraju svojstvenim vrijednostima ciji je realan dio veciod nule generiraju nestabilan potprostor sustava. Ostali vektori iz B su baza zacentralni potprostor sustava.
Stabilan, nestabilan i centralni potprostor oznacavat cemo redom s Es, Eu i Ec.Dakle, vrijedi direktna suma
Es u Eu u Ec = Mn1(R) .
Teorem 2.3 Stabilan, nestabilan i centralni potprostor su invarijantni na tok sus-tava x′ = Ax.
Dokaz. Prvo cemo dokazati da je svaki potprostor generaliziranih svojstvenih vek-tora invarijantan s obzirom na A. Uzmimo stoga neki vektor v koji je genera-lizirani svojstveni vektor pridruzen svojstvenoj vrijednosti λ matrice A, odnosno
22

neka je v ∈ G(λ). Tada postoji m ∈ N takav da je (A − λI)mv = 0. Onda je i(A−λI)m−1(A−λI)v = 0, tj. (A−λI)v ∈ Ker(A−λI)m−1. Medutim, to znaci daje i vektor w := (A− λI)v ∈ G(λ). Konacno, kako je Av = λv + w, a v, w ∈ G(λ),i vektor Av ∈ G(λ). Dakle, G(λ) je invarijantan na A.
Sada uzmimo v ∈ Es. Neka je B = {b1, . . . , b`, b1, . . . , bq, b1, . . . , bq} baza za Es.
Pritom su bi ∈ G(λi), za neki λi ∈ R, λi < 0, i = 1, . . . , `, te bj = Re(vj), bj =Im(vj), gdje je vj ∈ G(µj), za neku svojstvenu vrijednost µj ∈ C\R, Re(µj) < 0,
j = 1, . . . , q. Tada je v =∑`
i=1 βibi +∑q
i=1 γibi +∑q
i=1 δibi, za neke βi ∈ R,i = 1, . . . , `, γj, δj ∈ R, j = 1, . . . , q. Imamo onda
Av = A
(∑i=1
βibi +
q∑i=1
γibi +
q∑i=1
δibi
)
= A
(∑i=1
βibi +
q∑i=1
γiRe(vi) +
q∑i=1
δiIm(vi)
)
=∑i=1
βiAbi +
q∑i=1
γiRe(Avi) +
q∑i=1
δiIm(Avi) . (2.4)
Dokazali smo da su generalizirani svojstveni potprostori invarijantni na A. S obziromda je bi ∈ G(λi), imamo i da je Abi ∈ G(λi), i = 1 . . . , `. Kako je G(λi) ≤ Es, vrijediAbi ∈ Es, i = 1, . . . , `.Nadalje, kako je vi ∈ G(µi), imamo i Avi ∈ G(µi), i = 1, . . . , q. Dakle, vektor Avimozemo zapisati u obliku Avi =
∑rij=1 αijw
(i)j , za neke αij ∈ C, gdje su w
(i)j ∈ G(µi)
takvi da im realan i imaginaran dio pripadaju bazi B. Stoga je
Re(Avi) =
ri∑j=1
(Re(αij)Re(w(i)j )− Im(αij)Im(w
(i)j )) ∈ Es ,
Im(Avi) =
ri∑j=1
(Re(αij)Im(w(i)j ) + Im(αij)Re(w
(i)j )) ∈ Es .
Dakle, za v ∈ Es iz (2.4) imamo Av ∈ Es.
Konacno, za v ∈ Es imamo
eAtv =∞∑k=0
tk
k!Akv .
Kako je Akv ∈ Es, k ∈ N, to je svaka parcijalna suma prethodnog reda u Es. Zbogzatvorenosti prostora Es dobivamo da je i red u Es, odnosno eAtv ∈ Es.
Na posve analogan nacin dokazujemo i da su nestabilan i centralni potprostor inva-rijantni na tok sustava. �
23

Stabilan i nestabilan potprostor imaju jos jedno vazno svojstvo, osim invarijant-nosti na tok sustava:
Teorem 2.4 Neka je A ∈ Rn. Vrijede sljedece tvrdnje:
a) Za svaki x0 ∈ Es vrijedi limt→+∞ eAtx0 = 0.
b) Za svaki x0 ∈ Eu vrijedi limt→−∞ eAtx0 = 0.
Dokaz. Dokazimo tvrdnju a). Zapisimo matricu A u obliku A = PJP−1 gdje jematrica J realni oblik Jordanove forme, a P pripadna matrica prijelaza. Tada je Joblika
J =
Bs 0 00 Bc 00 0 Bu
.
Pritom, matrica Bs odgovara svojstvenim vrijednostima s realnim dijelom manjimod nula, matrica Bc odgovara svojstvenim vrijednostima s realnim dijelom nula, dokmatrica Bu odgovara svojstvenim vrijednostima s realnim dijelom vecim od nula. Zax0 ∈ Es je tada vektor P−1x0 zapis vektora x0 u bazi vektora iz P . Ako je matricaBs reda k, prvih k stupaca u matrici P su vektori iz Es. Dakle, posljednjih n − kkomponenti vektora P−1x0 su jednake nula, odnosno imamo
P−1x0 =
(x00
),
gdje je x0 ∈Mk1(R). Dakle, imamo
eAtx0 = PeJtP−1x0 =
(eBstx0
0
).
Iz opceg oblika matrice eBst slijedi tvrdnja a).
Posve analogno se dokazuje i tvrdnja pod b). �
Korolar 2.1 Ako su sve svojstvene vrijednosti matrice A takve da im je realan diomanji od nule, onda za svaki x0 ∈ Rn vrijedi limt→+∞ e
Atx0 = 0. Ako su sve svoj-stvene vrijednosti matrice A s realnim dijelom vecim od nule, onda je limt→−∞ e
Atx0 =0.
Definicija 2.5 Ako su sve svojstvene vrijednosti matrice A takve da im je realandio manji od nule, kazemo da je ishodiste (kriticna tocka sustava) ponor sustavax′ = Ax. Ako su pak sve svojstvene vrijednosti takve da im je realan dio veci odnule, ishodiste je izvor.
24

Slika 2.1.
Primjer 2.3 Odredimo stabilan, nestabilan i centralni potprostor sustavax′ = 2xy′ = 0z′ = 4z
.
Pripadna matrica sustava je
A =
2 0 00 0 00 0 4
.
Svojstvene vrijednosti matrice su 2, 0 i 4, a pripadni svojstveni potprostori su
VA(2) =
1
00
, VA(0) =
0
10
, VA(3) =
0
01
.
Iz toga zakljucujemo da je
Es = {0} , Eu =
1
00
,
001
, Ec =
0
10
.
Dakle, nestabilan potprostor odgovara xz-ravnini. U toj ravnini imamo kriticnutocku ishodiste te po dvije orbite koje pripadaju x-osi i z-osi. Te orbite se udaljavajuod ishodista. Iz x′ = 2x i z′ = 4z, dobivamo z = Cx2. Stoga sve ostale orbite uxz-ravnini pripadaju parabolama koje prolaze kroz ishodiste te se udaljavaju se odishodista (slika 2.1). U proslosti se sve netrivijalne orbite priblizavaju ishodistu,
25
Slika 2.2.
odnosno kriticnoj tocki sustava, sto je i svojstvo orbita u nestabilnom potprostorusustava.
U svim ravninama paralelnima s xz-ravninom imamo slicnu situaciju, odnosno or-bite u tim ravninama dobivamo translacijom orbita iz xz-ravnine (slika 2.2). Dakle,svaka od tih ravnina je takoder invarijantna na tok sustava, ali naravno nije pot-prostor od R3. Orbite iz te ravnine se u proslosti ne priblizavaju ishodistu vec nekojdrugoj kriticnoj tocki.
Sve tocke y-osi su kriticne i zajedno cine centralni potprostor sustava. I u tompotprostoru imamo ocito invarijantnost na tok sustava.
Primjer 2.4 Zadan je sustav x′ = −yy′ = xz′ = z
.
Matrica sustava je
A =
0 −1 01 0 00 0 1
.
Svojstvene vrijednosti matrice su ±i i 1, a pripadni svojstveni potprostori
VA(±i) =
1∓i0
, VA(1) =
0
01
.
26
Slika 2.3.
Kako je 1−i0
=
100
+ i
0−1
0
,
imamo
Es = {0} , Ec =
1
00
,
0−1
0
, Eu =
0
01
.
Dakle, nestabilan potprostor odgovara z-osi. Vidimo takoder da se on sastoji odishodista kao kriticne tocke i dvije orbite koje se udaljavaju od ishodista. Ishodisteje jedina kriticna tocka sustava. Iz prve dvije jednadzbe imamo x2 + y2 = C. Ako jepocetna tocka orbite oblika (x0, y0, 0), orbita je kruznica sa sredistem u ishodistu ipripada centralnom potprostoru, odnosno xy-ravnini (slika 2.3). U slucaju kad orbitapocinje iz tocke (x0, y0, z0), ali izvan xy-ravnine i izvan z-osi, i dalje je x2 + y2 = Cpa se orbita krece po rubu cilindra radijusa
√x20 + y20 i udaljava se od xy-ravnine
(slika 2.4). Primjecujemo da se takve orbite ne nalaze u potpunosti unutar nekogpotprostora.
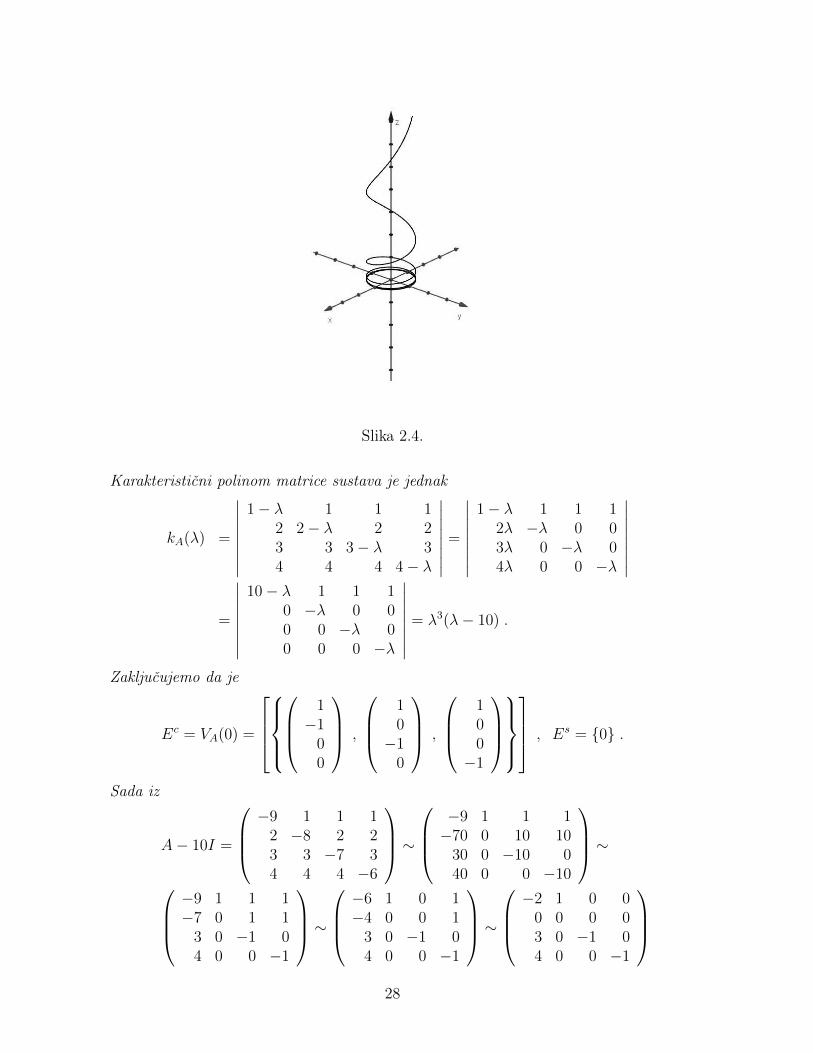
Primjer 2.5 Zadan je sustav
x′ =
1 1 1 12 2 2 23 3 3 34 4 4 4
x .
27
Slika 2.4.
Karakteristicni polinom matrice sustava je jednak
kA(λ) =
∣∣∣∣∣∣∣∣1− λ 1 1 1
2 2− λ 2 23 3 3− λ 34 4 4 4− λ
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣1− λ 1 1 1
2λ −λ 0 03λ 0 −λ 04λ 0 0 −λ
∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣10− λ 1 1 1
0 −λ 0 00 0 −λ 00 0 0 −λ
∣∣∣∣∣∣∣∣ = λ3(λ− 10) .
Zakljucujemo da je
Ec = VA(0) =
1−1
00
,
10−1
0
,
100−1
, Es = {0} .
Sada iz
A− 10I =
−9 1 1 1
2 −8 2 23 3 −7 34 4 4 −6
∼−9 1 1 1−70 0 10 10
30 0 −10 040 0 0 −10
∼−9 1 1 1−7 0 1 1
3 0 −1 04 0 0 −1
∼−6 1 0 1−4 0 0 1
3 0 −1 04 0 0 −1
∼−2 1 0 0
0 0 0 03 0 −1 04 0 0 −1
28

vidimo da je
Eu = VA(10) =
1234
.
Prema tome, pronasli smo jedan jednodimenzionalan i jedan trodimenzionalan inva-rijantan potprostor sustava. Takoder, zakljucujemo da orbite koje prolaze kroz tockeoblika (α, 2α, 3α, 4α), α ∈ R, izviru iz ishodista.
Slika 2.5.
Primjer 2.6 Promotrimo sada sustavx′ = x+ 2yy′ = −2x+ yz′ = −2z
.
Matrica sustava je 1 2 0−2 1 0
0 0 −2
.
29

Njezine svojstvene vrijednosti su 1± 2i te −2. Imamo
Ec = {0} , Es =
0
01
, Eu =
1
00
,
010
.
Ako prijedemo na polarne koordinate x(t) = r(t) cosϕ(t), y(t) = r(t) sinϕ(t), imamo
r′ = r , ϕ′ = −2 .
Dakle, sve orbite koje pocinju u xy-ravnini ostaju u toj ravnini (slika 2.5). Spiralnoizviru iz ishodista (jedine kriticne tocke sustava). Ravnina xy je jedan invarijantanpotprostor sustava. Orbite koje u pocinju na z-osi u potpunosti joj pripadaju te jei z-os potprostor invarijantan na tok sustava. Te orbite se priblizavaju ishodistu.Ostale orbite se spiralno udaljavaju od kriticne tocke, ali se ujedno i priblizavajuxy-ravnini. Te orbite ne pripadaju u potpunosti nekoj ravnini ili pravcu (slika 2.6).Kod ovog sustava vidimo dakle sve karakteristike stabilnog i nestabilnog potprostorakoje smo naveli.
Slika 2.6.
30
Poglavlje 3
Stabilna mnogostrukostnelinearnog sustava
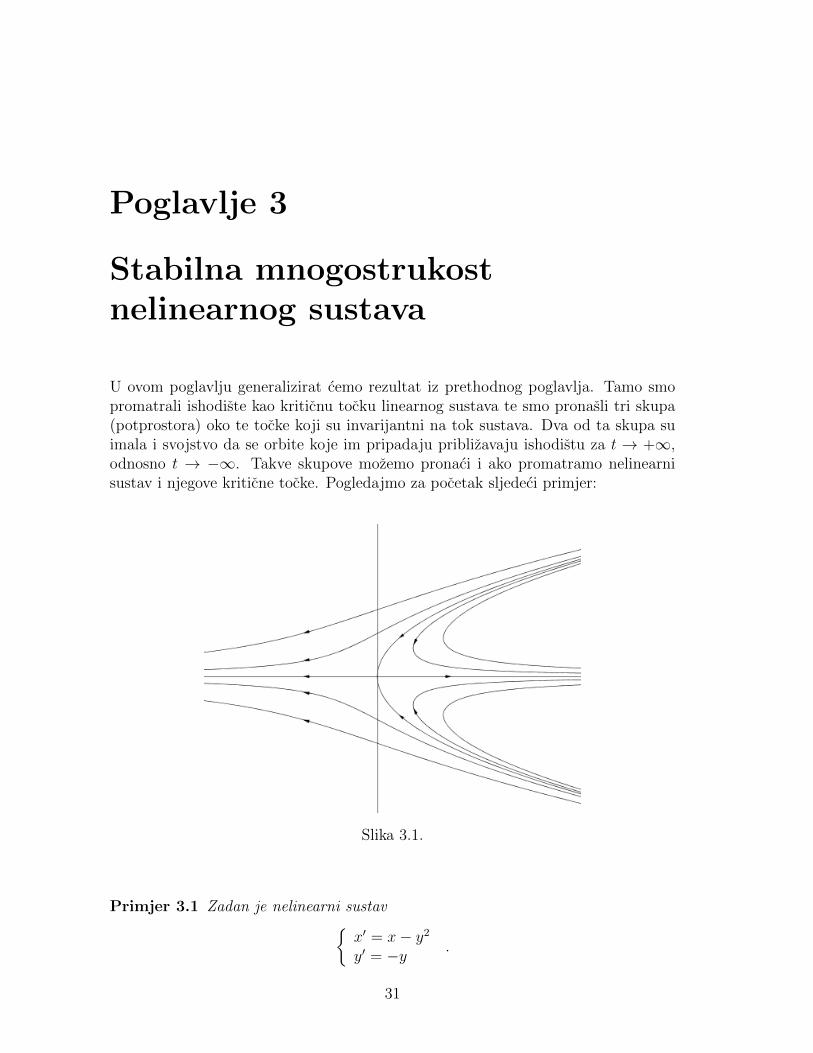
U ovom poglavlju generalizirat cemo rezultat iz prethodnog poglavlja. Tamo smopromatrali ishodiste kao kriticnu tocku linearnog sustava te smo pronasli tri skupa(potprostora) oko te tocke koji su invarijantni na tok sustava. Dva od ta skupa suimala i svojstvo da se orbite koje im pripadaju priblizavaju ishodistu za t → +∞,odnosno t → −∞. Takve skupove mozemo pronaci i ako promatramo nelinearnisustav i njegove kriticne tocke. Pogledajmo za pocetak sljedeci primjer:
Slika 3.1.
Primjer 3.1 Zadan je nelinearni sustav{x′ = x− y2y′ = −y .
31

Iz druge jednadzbe dobivamo y(t) = C2e−t. Rjesenje x trazimo u obliku x(t) =
C1(t)et. Uvrstavanjem dobivamo C ′1(t) = −C2
2e−3t pa je x(t) = C1e
t + 13C2
2e−2t. Iz
pocetnih uvjeta (x(0), y(0)) = (x0, y0) dobivamo
x(t) =1
3y20e−2t +
(x0 −
1
3y20
)et , y(t) = y0e
−t .
Promotrimo sada pocetne uvjete za koje je x0 − 13y20 = 0. Dakle, tocke se nalaze na
paraboli x = 13y2 i onda imamo
limt→+∞
x(t) = limt→+∞
1
3y20e−2t = 0 , lim
t→+∞y(t) = lim
t→+∞y0e−t = 0 .
Takoder, za tako odabrane pocetne uvjete imamo
x(t) =1
3(y(t))2 , t ∈ R .
Dakle, pripadna orbita u potpunosti pripada paraboli. Drugim rijecima, parabola jeinvarijantan skup za tok sustava. S obzirom da se orbite u buducnosti priblizavajukriticnoj tocki (0, 0), parabola ima ista svojstva koja smo otkrili za stabilan potpros-tor linearnog sustava.
Nadalje, uzmimo pocetne tocke na x-osi. Dakle, imamo y0 = 0 pa je
limt→−∞
x(t) = limt→−∞
x0et = 0 , lim
t→−∞y(t) = 0 .
Kako je y(t) = 0, t ∈ R, orbite su u potpunosti na x-osi te x-os ima svojstva kojasmo utvrdili za nestabilan potprostor linearnog sustava.
3.1 Lokalna stabilna i nestabilna mnogostrukost
U prethodnom primjeru smo nasli skupove s istim svojstvima koja imaju i stabilani nestabilan potprostor linearnog sustava. Ta cinjenica se moze i generalizirati.U nastavku koristimo pojmove iz diferencijalne geometrije, poput diferencijabilnemnogostrukosti i tangencijalnog prostora. Objasnjenja pojmova se mogu pronaci uDodatku skripte. Imamo za pocetak sljedeci rezultat.
Teorem 3.1 (Teorem o stabilnoj mnogostrukosti) Neka je f ∈ C1(E)n, gdjeE ⊆ Rn otvoren skup koji sadrzi ishodiste, te neka je ishodiste kriticna tocka sus-tava x′ = f(x). Pretpostavimo da matrica A = Df(0) ima k svojstvenih vrijednostis negativnim realnim dijelom, te n − k svojstvenih vrijednosti s pozitivnim realnimdijelom.
32

Tada postoji k-dimenzionalna diferencijabilna mnogostrukost S, koju zovemo lo-kalna stabilna mnogostrukost sustava oko tocke 0, takva da za tocke x0 ∈ S vrijedilimt→+∞ φ(t, x0) = 0.Takoder, postoji i (n− k)-dimenzionalna diferencijabilna mnogostrukost U , koju zo-vemo lokalna nestabilna mnogostrukost sustava oko tocke 0, takva da za tocke x0 ∈ Uvrijedi limt→−∞ φ(t, x0) = 0.Nadalje, mnogostrukost S tangencijalna je u ishodistu na stabilan potprostor linear-nog sustava x′ = Ax, dok je mnogostrukost U tangencijalna u ishodistu na nestabilanpotprostor sustava x′ = Ax.
Napomena 3.1 Primijetimo da se dimenzija lokalne stabilne mnogostrukosti po-dudara s dimenzijom pripadnog stabilnog potprostora. Analogno vrijedi i za lokalnunestabilnu mnogostrukost i nestabilan potprostor.
Napomena 3.2 U iskazu teorema podrazumijeva se da ukoliko sustav x′ = f(x) nedefinira dinamicki sustav, promatramo topolosko ekvivalentan sustav kojem se faznidijagram podudara s faznim dijagramom pocetnog sustava, a rjesenja mu definirajudinamicki sustav. Egzistenciju takvog sustava garantira nam Teorem o globalnojegzistenciji.
Napomena 3.3 Analogan rezultat vrijedi i ako je zadana neka druga kriticna tockasustava x0 6= 0. Tada uvodimo supstituciju x(t) = x(t) − x0, pa je x′(t) = x′(t) =f(x(t)) = f(x(t) + x0) =: g(x(t)). Imamo jos i Dg(0) = Df(x0) pa mozemoprimijeniti Teorem 3.1 na sustav x′ = g(x) oko njegove kriticne tocke 0.
Dokaz Teorema 3.1. Tvrdnju teorema cemo dokazati lokalno, odnosno mnogostru-kost S koju cemo konstruirati nije najveci skup za koji vrijedi tvrdnja.
Za pocetak, zapisimo matricu A u Jordanovoj formi A = PJP−1. Funkciju fzapisimo u obliku f = A + F . Primijetimo da je F (0) = 0. Kako je Df(0) = A,imamo i DF (0) = 0. Iz x′ = Ax + F (x) imamo x′ = PJP−1x + F (x) te uz sups-tituciju y = P−1x dobivamo y′ = Jy + P−1F (Py). Definiramo G(y) = P−1F (Py).Nadalje promatramo jednostavniji sustav
y′ = Jy +G(y) . (3.1)
Sada zapisimo J u formi
J =
(B 00 C
),
pri cemu matrica B ima samo svojstvene vrijednosti kojima je realni dio manji odnule, dok matrica C ima svojstvene vrijednosti s realnim dijelom vecim od nule.Oznacimo sada matrice
V (t) =
(eBt 00 0
), W (t) =
(0 00 eCt
).
33

Tada vrijedi V ′(t) = JV (t), W ′(t) = JW (t). Primijetimo da je V (t) +W (t) = eJt.
Dokazat cemo da je neprekidna funkcija u koja je rjesenje integralne jednadzbe
u(t, b) = V (t)b+
∫ t
0
V (t− s)G(u(s, b))ds−∫ ∞t
W (t− s)G(u(s, b))ds ,
odnosno
u(t, b) = V (t)b+
∫ t
0
V (t− s)G(u(s, b))ds− limT→∞
∫ T
t
W (t− s)G(u(s, b))ds
rjesenje zadanog sustava za t ≥ 0. Racunamo
d
dtu(t, b) = V ′(t)b+
∫ t
0
V ′(t− s)G(u(s, b))ds+ V (0)G(u(t, b))
− limT→∞
(∫ T
t
W ′(t− s)G(u(s, b))ds−W (0)G(u(t, b))
)= JV (t)b+
∫ t
0
JV (t− s)G(u(s, b))ds+ (V (0) +W (0))G(u(t, b))
− limT→∞
∫ T
t
JW (t− s)G(u(s, b))ds
= J
(V (t)b+
∫ t
0
V (t− s)G(u(s, b))ds−∫ ∞t
W (t− s)G(u(s, b))ds
)+G(u(t, b))
= Ju(t, b) +G(u(t, b)) .
Napomenimo da je prethodni racun zasad formalan, odnosno da zahjeva regularnostrjesenja u koju cemo dobiti nakon konstrukcije rjesenja.
Nadalje, zelimo dokazati da je u = u(t, b) limes sukcesivnih aproksimacija kojeza m ≥ 1 definiramo kao
u(m)(t, b) = V (t)b+
∫ t
0
V (t− s)G(u(m−1)(s, b))ds−∫ ∞t
W (t− s)G(u(m−1)(s, b))ds ,
pri cemu je u(0)(t, b) = 0.
Prvo mozemo primijetiti da postoji α > 0 takav da je Re(λ) < −α za svaku svoj-stvenu vrijednost λ matrice B. Dokazat cemo da postoje konstante K, σ > 0 takveda je
||V (t)|| ≤ Ke−(α+σ)t , t ≥ 0 ,
||W (t)|| ≤ Keσt , t ≤ 0 .
Uzmimo dovoljno malen σ > 0 takav da je Re(λ) < −(α + 2σ) za svaku svojstvenuvrijednost λ matrice B, te Re(λ) > 2σ za svaku svojstvenu vrijednost λ matrice C.
34

Primijetimo da je svaki clan matrice V (t), do na multiplikativnu konstantu, oblikaeattm ili eattm cos(bt) ili eattm sin(bt), za neki m ∈ N, pri cemu je λ = a + ib svoj-stvena vrijednost matrice B. Prema tome, element (i, j) matrice V (t) ocjenjujemos |Vij(t)| ≤ eattm ≤ e−(α+σ)t · e−σttm ≤ Kv
ije−(α+σ)t , t ≥ 0, gdje je Kv
ij konstanta.Na slican nacin ocjenjujemo |Wij(t)| ≤ |eattm| ≤ eσt · |eσttm| ≤ Kw
ijeσt, t ≤ 0. Dakle,
postoji trazena konstanta K.
Sada cemo dokazati da je za t ≥ 0
||u(j)(t, b)− u(j−1)(t, b)|| ≤ K||b||e−αt
2j−1, j ∈ N . (3.2)
Dokaz provodimo indukcijom. Prvo je zbog G(0) = 0 i σ > 0
||u(1)(t, b)− u(0)(t, b)|| = ||V (t)b|| ≤ ||V (t)|| · ||b|| ≤ Ke−(α+σ)t||b|| ≤ K||b||e−αt .
Ako pretpostavimo da tvrdnja vrijedi za j ≤ m, imamo prvo za j ≤ m
||u(j)(t, b)|| ≤j∑r=1
||u(r)(t, b)− u(r−1)(t, b)|| ≤ K||b||e−αt ·j∑r=1
1
2r−1≤ 2K||b|| . (3.3)
Primijetimo takoder da je DG(y) = D(P−1 ◦ F ◦ P )(y) = P−1DF (Py)P pa zbogneprekidne diferencijabilnosti funkcije F zakljucujemo da je i G glatka funkcija.Prema teoremu srednje vrijednosti imamo
||G(y)−G(y)|| ≤ maxξ∈[y,y]
||DG(ξ)|| · ||y − y|| .
Kako je DF (0) = 0, i DG(0) = 0 pa za svaki ε > 0 postoji δε > 0 takav da za
||ξ|| < δε vrijedi ||DG(ξ)|| < ε. Primijetimo, ako su ξ, ξ ∈ B(0, δε), onda i za
ξ ∈ [ξ, ξ] vrijedi ξ ∈ B(0, δε), odnosno za y, y ∈ B(0, δε) je
||G(y)−G(y)|| ≤ ε||y − y|| . (3.4)
Sada odaberimo ε takav da je ε < σ/(4K) te nakon toga uzmimo ||b|| < δε/(2K).Tada iz (3.3) slijedi da je ||u(j)(t, b)|| ≤ δε za svaki j ≤ m i t ≥ 0 pa je zbog (3.4)
||G(u(m)(t, b))−G(u(m−1)(t, b))|| ≤ ε||u(m)(t, b)− u(m−1)(t, b)|| .
Sada konacno prelazimo na korak indukcije te ocjenjujemo
||u(m+1)(t, b)− u(m)(t, b)||
≤∫ t
0
ε||V (t− s)|| · ||u(m)(s, b)− u(m−1)(s, b)||ds
+
∫ ∞t
ε||W (t− s)|| · ||u(m)(s, b)− u(m−1)(s, b)||ds
35

≤ ε
∫ t
0
Ke−(α+σ)(t−s) · K||b||e−αs
2m−1ds+ ε
∫ ∞t
Keσ(t−s) · K||b||e−αs
2m−1ds
=εK2||b||
2m−1
(e−(α+σ)t
∫ t
0
eσsds+ eσt∫ ∞t
e−(α+σ)sds
)=εK2||b||
2m−1
(e−(α+σ)t · 1
σ(eσt − 1) + eσt · e
−(α+σ)t
α + σ
)≤ εK2||b||
2m−1
(e−αt
σ+e−αt
σ
)≤ εK2||b||e−αt
2m−2σ=
4εK2||b||e−αt
2mσ
≤ K||b||e−αt
2m
i time smo dokazali (3.2).
Sad za sve m, p ∈ N, m > p vrijedi
||u(m)(t, b)− u(p)(t, b)|| ≤m∑
r=p+1
||u(r)(t, b)− u(r−1)(t, b)||
≤ K||b||m∑
r=p+1
1
2r−1≤ K||b||
∞∑r=p+1
1
2r−1= K||b|| · 1
2p
∞∑r=0
1
2r=K||b||2p−1
. (3.5)
Iz prethodne nejednakosti slijedi da je niz (u(m)(t, b))m∈N Cauchyjev pa je i konver-gentan. Kako ocjena (3.5) ne ovisi o varijabli t, niz konvergira i uniformno. Takoderslicno kao u (3.5) za p = 0 dobivamo ||u(m)(t, b)|| ≤ 2K||b||e−αt te time zakljucujemoda je limt→+∞ u(t, b) = 0.
Primijetimo sada da posljednjih n − k komponenti vektora b ne utjecu na defi-niciju iteracija, vec da one ovise samo o komponentama b1, . . . , bk. Takoder za t = 0funkcija u poprima po komponentama vrijednosti
uj(0, b) = bj , j = i, . . . , k ,
uj(0, b) = −(∫ ∞
0
W (−s)G(u(s, b1, . . . , bk, 0, . . . , 0))ds
)j
, j = k + 1, . . . , n .
Konacno, neka je BS = B(0, δε/(2K)) otvorena kugla u Rk. Definiramo mnogostru-kost koja se sastoji od svih prethodnih pocetnih tocaka, odnosno imamo
S = {(b, ψk+1(b), . . . , ψn(b)) : b ∈ BS},
gdje je ψj(b) = uj(0, b) , j = k + 1, . . . , n. Sada vratimo supstituciju na skupu
S te dobivamo mnogostrukost S = PS. Tako definirana mnogostrukost je trazenastabilna mnogostrukost sustava.
36

Sada cemo odrediti tangencijalni prostor na S u ishodistu. Uvrstavanjem b = 0u aproksimacije lako vidimo da je u(m)(t, 0) = 0 za m ∈ N pa je u(t, 0) = 0, t ≥ 0.Tangencijalni prostor je generiran vektorima
ti =∂
∂bi(b1, . . . , bk, ψj(b1, . . . , bk), . . . , ψn(b1, . . . , bk))|b=0 , i = 1, . . . , k .
Racunamoti = (ei, pk+1, . . . , pn) ,
gdje je ei kanonski vektor baze prostora Rk, dok je
pj = −(∫ ∞
0
W (−s)DG(u(s, 0))∂u
∂bi(s, 0)ds
)j
, j = k + 1, . . . , n .
Kako je DG(0) = 0, dobivamo da je ti = ei, i = 1, . . . , k, gdje je ei vektor iz kanon-ske baze od Rn.
Tangencijalni prostor na originalnu mnogostrukost je znaci generiran vektorima Pti,i = 1, . . . , k koji su jednaki vektorima baze od Es. Dakle, tangencijalni potprostorod S se podudara s Es pa je S tangencijalna na Es u ishodistu.
Da bismo odredili nestabilnu mnogostrukost oko ishodista, promatramo sustav
y′ = −Jy −G(y) . (3.6)
Ishodiste je kriticna tocka i ovog sustava. Sada na prethodno opisani nacin odredimostabilnu mnogostrukost sustava (3.6). Nazovimo ju S. Dakle, ako je y0 ∈ S, i y jerjesenje od (3.6) za koje je y(0) = y0, onda je limt→+∞ y(t) = 0.
Sada definiramo y(t) = y(−t). Tada je y′(t) = −y′(−t) = Jy(−t) + G(y(−t)) =Jy(t) + G(y(t)). Drugim rijecima, y je rjesenje sustava (3.1). Uz to vrijedi i
limt→−∞ y(t) = 0. Prema, tome PS je trazena nestabilna mnogostrukost U .
Analogno kao i prije dokazujemo da je Eu tangencijalan na U u ishodistu. �
Primjer 3.2 Odredimo stabilnu i nestabilnu mnogostrukost oko kriticne tocke sus-tava
x′1 = −x1x′2 = −x2 + x21x′3 = x3 + x21
.
Za pocetak primijetimo da je ishodiste jedina kriticna tocka sustava te da je
A = Df(0) =
−1 0 00 −1 00 0 1
.
37

Dakle, A = J , P = I, F = G. Racunamo iteracije za vektore b iz intervala BS
definiranog u Teoremu o stabilnoj mnogostrukosti. Prvo je u(0)(t, b) = 0. Zatim je
V (t) =
e−t 0 00 e−t 00 0 0
, W (t) =
0 0 00 0 00 0 et
.
Zbog G(u(0)(t, b)) = 0 je
u(1)(t, b) = V (t)b =
e−tb1e−tb2
0
.
Dalje racunamo u(2):
u(2)(t, b) = V (t)b+
∫ t
0
V (t− s)G(u(1)(s, b))ds−∫ ∞t
W (t− s)G(u(1)(s, b))ds
=
e−tb1e−tb2
0
+
∫ t
0
e−(t−s) 0 00 e−(t−s) 00 0 0
0e−2sb21e−2sb21
ds
−∫ ∞t
0 0 00 0 00 0 et−s
0e−2sb21e−2sb21
ds
=
e−tb1e−tb2
0
+
∫ t
0
0e−t−sb21
0
ds−∫ ∞t
00
et−3sb21
ds
=
e−tb1e−tb2 + e−tb21(1− e−t)
− e−2tb213
.
Vidimo da je ocito u(m)(t, b) = u(2)(t, b) = 0, t ≥ 0, m > 2. Prema tome, u(t, b) =u(2)(t, b), t ≥ 0. Stabilnu mnogostrukost dobivamo uvrstavanjem t = 0 u vrijednostu(t, b) te je onda
S = {(b1, b2, ψ3(b1, b2)) : b ∈ BS} =
{(b1, b2,−
b213
): b ∈ BS
}.
Da bismo pronasli pripadnu nestabilnu mnogostrukost, promatramo sustav x′ =−Ax− F (x), odnosno sustav
x′1 = x1x′2 = x2 − x21x′3 = −x3 − x21
.
Da bismo uskladili oznake s oznakama u algoritmu, zamijenimo privremeno oznakex1 ↔ x3 te prvu i trecu jednadzbu. Dobivamo sustav
x′1 = −x1 − x23x′2 = x2 − x23x′3 = x3
. (3.7)
38

Sada odredimo potrebne matrice
V (t) =
e−t 0 00 0 00 0 0
, W (t) =
0 0 00 et 00 0 et
.
Racunamo pripadne iteracije u. Imamo u(0)(t, b) = 0 i dalje
u(1)(t, b) = V (t)b =
e−tb100
.
Lako zakljucujemo da je u(m)(t, b) = u(1)(t, b) za m ∈ N pa je u(t, b) = u(1)(t, b),t ≥ 0, te iz vrijednosti funkcije u za t = 0 dobivamo da je nestabilna mnogostrukostsustava (3.7) jednaka
U = {(b1, ψ2(b1), ψ3(b1) : b1 ∈ BU} = {(b1, 0, 0) : b1 ∈ BU} ,
gdje je BU pripadni interval iz algoritma.
Konacno, vratimo li zamjenu koordinata x1 ↔ x3, dobivamo nestabilnu mnogos-trukost pocetnog sustava
U = {(0, 0, b1) : b1 ∈ BU} .
Primjer 3.3 Odredit cemo i stabilnu i nestabilnu mnogostrukost sustava{x′1 = −7x1 + 12x2 + 12x21 − 36x1x2 + 27x22x′2 = −4x1 + 7x2 + 8x21 − 24x1x2 + 18x22
oko kriticne tocke 0. Sada je
A = Df(0) =
(−7 12−4 7
).
Matricu A moramo svesti na Jordanovu formu. Prvo primijetimo da je kA(λ) =λ2 − 1 pa su svojstvene vrijednosti matrice A jednake ±1. Dalje je
VA(1) =
[{(32
)}], VA(−1) =
[{(21
)}].
Prema tome, A = PJP−1, gdje je
J =
(−1 0
0 1
), P =
(2 31 2
), P−1 =
(2 −3−1 2
).
39

Iz
F (x) =
(12x21 − 36x1x2 + 27x228x21 − 24x1x2 + 18x22
)=
(3(2x1 − 3x2)
2
2(2x1 − 3x2)2
)i G(y) = P−1F (Py) dobivamo
G(y) = P−1F (2y1 + 3y2, y1 + 2y2) =
(2 −3−1 2
)(3y212y21
)=
(0y21
).
Sada racunamo iteracije u(m) za sustav y′ = Jy + G(y). Prvo je u(0)(t, b) = 0.Imamo i
V (t) =
(e−t 00 0
), W (t) =
(0 00 et
).
Sada je
u(1)(t, b) = V (t)b =
(e−tb1
0
).
Dalje je
u(2)(t, b) = V (t)b+
∫ t
0
V (t− s)G(u(1)(s, b))ds−∫ ∞t
W (t− s)G(u(1)(s, b))ds
=
(e−tb1
0
)−∫ ∞t
(0 00 et−s
)(0
e−2sb21
)=
(e−tb1
− b21e−2t
3
).
Kako druga komponenta iteracije ne utjece na sljedecu iteraciju, dobivamo u(m)(t, b) =u(2)(t, b), za m > 2. Dakle, u(t, b) = u(2)(t, b), t ≥ 0. Uvrstimo t = 0. Sada je sta-bilna mnogostrukost sustava y′ = Jy +G(y) jednaka
S =
{(b1,−
b213
): b1 ∈ BS
}.
Dakle, stabilna mnogostrukost pocetnog sustava je
S = PS =
{(2b1 − b21, b1 −
2b213
): b1 ∈ BS
}.
Tangencijalni prostor na S u ishodistu je prostor
Es =
[{(21
)}].
Trazimo sada nestabilnu mnogostrukost za sustav y′ = Jy + G(y) koja je jednakastabilnoj mnogostrukosti sustava y′ = −Jy −G(y), odnosno sustava{
y′1 = y1y′2 = −y2 − y21
.
Zamijenimo za pocetak koordinate y1 i y2 te jednadzbe tog sustava. Tada imamosustav {
y′1 = −y1 − y22y′2 = y2
. (3.8)
40

Sada uz
V (t) =
(e−t 0
0 0
), W (t) =
(0 00 et
)i u(0)(t, b) = 0 imamo
u(1)(t, b) = V (t)b =
(e−tb1
0
).
Dalje racunamo
u(2)(t, b) = V (t)b+
∫ t
0
V (t− s)G(u(1)(s, b))ds−∫ ∞t
W (t− s)G(u(1)(s, b))ds .
Dobivamo u(2)(t, b) = u(1)(t, b) i dalje je lako vidjeti da je u(m)(t, b) = u(1)(t, b),m ∈ N. Prema tome dobivamo stabilnu mnogostrukost S = {(b1, 0) : b1 ∈ BU}sustava (3.8) te zamjenom koordinata y1 ↔ y2 stabilnu mnogostrukost sustava y′ =
−Jy − G(y) koja je jednaka S = {(0, b1) : b1 ∈ BU}. Ona je ujedno i nestabilnamnogostrukost sustava y′ = Jy + G(y). Konacno, zamjenom x = Py, dobivamonestabilnu mnogostrukost zadanog sustava
U = {(3b1, 2b1) : b1 ∈ BU} .
Tangencijalni prostor na U u ishodistu je prostor
Eu =
[{(32
)}].
3.2 Globalna stabilna i nestabilna mnogostrukost
U proslom potpoglavlju konstruirali smo lokalnu stabilnu mnogostrukost. Orbitekoje pocinju u tom skupu priblizavaju se kriticnoj tocki kad t → +∞. Iz dokazaTeorema o stabilnoj mnogostrukosti vidimo da taj skup pripada opcenito nekojmaloj okolini kriticne tocke. Na taj nacin dobivamo skup koji ne sadrzi u potpunostisve svoje orbite. Ako ga nadopunimo ostacima svih orbita koje u njemu zapocinju,dobit cemo skup, odnosno mnogostrukost s prethodno navedenim svojstvom, kojaje uz to i invarijantna na tok sustava. Dok mnogostrukost konstruiranu u teoremu3.1 nazivamo lokalnom stabilnom mnogostrukosti, novo konstruirana mnogostrukostnaziva se globalna stabilna mnogostrukost. Formalno definiramo:
Definicija 3.1 Neka je S lokalna stabilna mnogostrukost. Tada je globalna stabilnamnogostrukost
W S(0) = {φ(t, x0) : x0 ∈ S, t ∈ R} .
41

Potpuno analogno uvodimo definiciju i globalne nestabilne mnogostrukosti:
Definicija 3.2 Neka je U lokalna nestabilna mnogostrukost. Tada je globalna nes-tabilna mnogostrukost
WU(0) = {φ(t, x0) : x0 ∈ U, t ∈ R} .
Primjer 3.4 Vratimo se na sustavx′1 = −x1x′2 = −x2 + x21x′3 = x3 + x21
.
Odredimo njegovo rjesenje za koje je x(0) = x(0). Iz prve jednadzbe imamo x1(t) =
x(0)1 e−t. Uvrstavanjem u druge dvije jednadzbe dobivamo
x′2 = −x2 + (x(0)1 e−t)2 ,
x′3 = x3 + (x(0)1 e−t)2 .
Rjesenja trazimo u obliku x2(t) = C2(t)e−t, x3(t) = C3(t)e
t, iz cega lako slijedi
x2(t) = −(x(0)1 )2e−2t + ((x
(0)1 )2 + x
(0)2 )e−t ,
x3(t) = −1
3(x
(0)1 )2e−2t +
(1
3(x
(0)1 )2 + x
(0)3
)et .
Uocavamo da je 13(x
(0)1 )2 + x
(0)3 = 0 nuzan i dovoljan uvjet da x(t)→ 0 za t→ +∞.
Takoder je x(0)1 = x
(0)2 = 0 nuzan i dovoljan uvjet da x(t)→ 0 za t→ −∞.
Nadalje, ako vrijedi 13(x
(0)1 )2 + x
(0)3 = 0, imamo i x3(t) = −1
3(x1(t))
2, t ∈ R. Ako je
pak x(0)1 = x
(0)2 , vrijedi i x1(t) = x2(t) = 0, t ∈ R. Dakle, orbite koje pocinju u skupu{
x ∈ R3 : x3 = −13x21}
i ostaju u tom skupu. Isto vrijedi i za orbite koje pocinju uskupu {x ∈ R3 : x1 = x2 = 0}. Prema tome, ta dva skupa su invarijantna na toksustava.
Zbog prethodna dva svojstva zakljucujemo da je
W S(0) =
{x ∈ R3 : x3 = −1
3x21
}, WU(0) = {x ∈ R3 : x1 = x2 = 0} .
U primjeru 3.2 smo primjenom Teorema o stabilnoj mnogostrukosti zakljucili dase orbite koje zapocinju u tim skupovima, ali u samo nekoj dovoljno maloj oko-lini ishodista, priblizavaju ishodistu u buducnosti (kod stabilne mnogostrukosti) ili uproslosti (kod nestabilne mnogostrukosti).
42

Primjer 3.5 Pogledat cemo sustav{x′ = y ,y′ = x− x3 . (3.9)
Linearizirani sustav zadanog sustava glasi{x′ = yy′ = x
.
Svojstvene vrijednosti matrice sustava su -1 i 1, sto znaci da je ishodiste hiperbolickakriticna tocka te prema Teoremu o stabilnoj mnogostrukosti u okolini kriticne tockesustava (3.9) postoje (lokalna) stabilna i nestabilna mnogostrukost dimenzije 1. Poz-nat nam je i fazni dijagram sustava (slika 3.2) na kojem mozemo vidjeti i globalnustabilnu i nestabilnu mnogostrukost. Zanimljivo je da se te dvije mnogostrukosti uovom primjeru podudaraju i jednake su skupu{
(x, y) ∈ R2 : y2 = x2 − x4
2
}.
Uocimo jos da globalna stabilna mnogostrukost sadrzi osim kriticne tocke jos dvijeorbite koje izlaze i vracaju se u kriticnu tocku, odnosno povezuju kriticnu tocku sasamom sobom.
Slika 3.2.
43

Definicija 3.3 Ako orbita povezuje kriticnu tocku sa samom sobom, zovemo ju ho-moklinicka orbita. Ako pak orbita povezuje dvije razlicite kriticne tocke, zovemo juheteroklinicka orbita.
Prema tome, u prethodnom primjeru imamo dvije homoklinicke orbite. Heterok-linicke orbite mozemo uociti na primjeru sustava{
x′ = yy′ = − sinx
,
koji opisuje gibanje matematickog njihala (slika 3.3). Primijetimo da su rjesenjasustava koja su opisana tim orbitama ogranicena na svom maksimalnom intervaluegzistencije pa su prema Teoremu o apriornim ocjenama definirana na citavom R.
Slika 3.3
Primijetimo jos da ako lineariziramo sustav koji opisuje njihalo oko ishodista, dobi-vamo linearni sustav s matricom (
0 1−1 0
).
Svojstvene vrijednosti te matrice su ±i pa ishodiste nije hiperbolicka tocka i ne za-dovoljava pretpostavke Teorema o stabilnoj mnogostrukosti. I iz faznog dijagramavidimo da su u okolini ishodista orbite sustava zatvorene krivulje, odnosno ne pos-toji orbita koja se priblizava ishodistu.
S druge strane, matrica sustava koji je linearizirani sustav oko kriticne tocke (π, 0)je matrica (
0 11 0
).
44
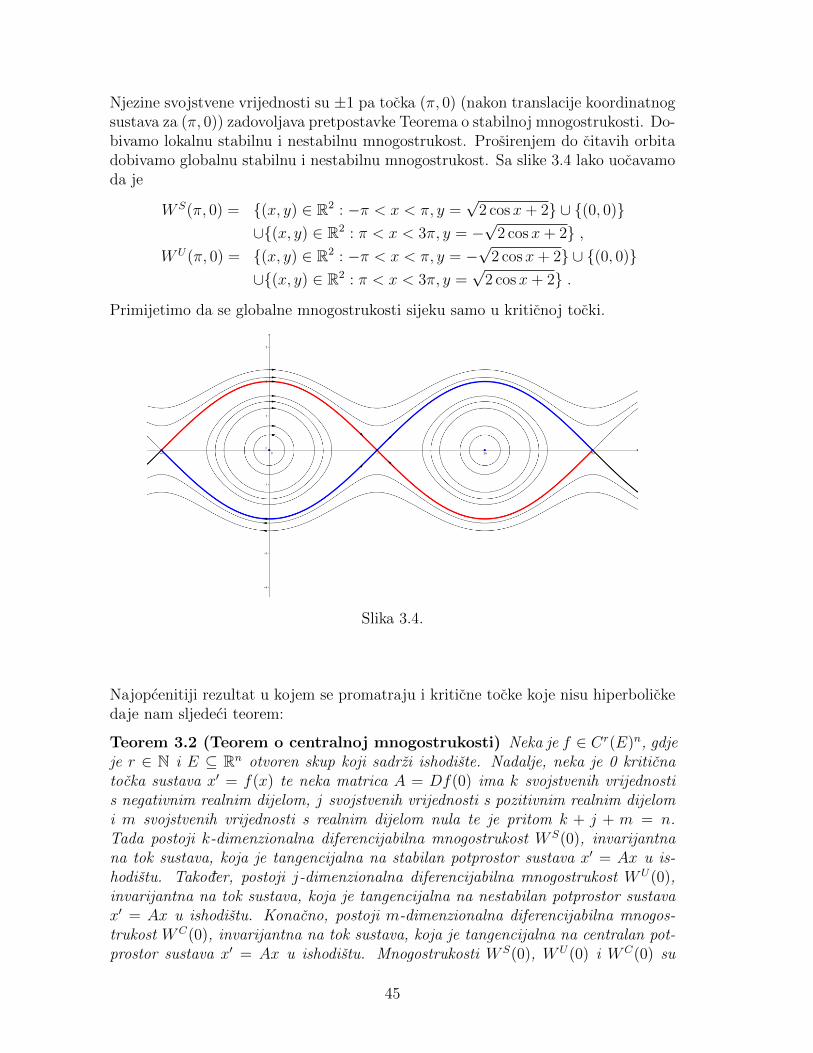
Njezine svojstvene vrijednosti su ±1 pa tocka (π, 0) (nakon translacije koordinatnogsustava za (π, 0)) zadovoljava pretpostavke Teorema o stabilnoj mnogostrukosti. Do-bivamo lokalnu stabilnu i nestabilnu mnogostrukost. Prosirenjem do citavih orbitadobivamo globalnu stabilnu i nestabilnu mnogostrukost. Sa slike 3.4 lako uocavamoda je
W S(π, 0) = {(x, y) ∈ R2 : −π < x < π, y =√
2 cosx+ 2} ∪ {(0, 0)}∪{(x, y) ∈ R2 : π < x < 3π, y = −
√2 cosx+ 2} ,
WU(π, 0) = {(x, y) ∈ R2 : −π < x < π, y = −√
2 cosx+ 2} ∪ {(0, 0)}∪{(x, y) ∈ R2 : π < x < 3π, y =
√2 cosx+ 2} .
Primijetimo da se globalne mnogostrukosti sijeku samo u kriticnoj tocki.
Slika 3.4.
Najopcenitiji rezultat u kojem se promatraju i kriticne tocke koje nisu hiperbolickedaje nam sljedeci teorem:
Teorem 3.2 (Teorem o centralnoj mnogostrukosti) Neka je f ∈ Cr(E)n, gdjeje r ∈ N i E ⊆ Rn otvoren skup koji sadrzi ishodiste. Nadalje, neka je 0 kriticnatocka sustava x′ = f(x) te neka matrica A = Df(0) ima k svojstvenih vrijednostis negativnim realnim dijelom, j svojstvenih vrijednosti s pozitivnim realnim dijelomi m svojstvenih vrijednosti s realnim dijelom nula te je pritom k + j + m = n.Tada postoji k-dimenzionalna diferencijabilna mnogostrukost W S(0), invarijantnana tok sustava, koja je tangencijalna na stabilan potprostor sustava x′ = Ax u is-hodistu. Takoder, postoji j-dimenzionalna diferencijabilna mnogostrukost WU(0),invarijantna na tok sustava, koja je tangencijalna na nestabilan potprostor sustavax′ = Ax u ishodistu. Konacno, postoji m-dimenzionalna diferencijabilna mnogos-trukost WC(0), invarijantna na tok sustava, koja je tangencijalna na centralan pot-prostor sustava x′ = Ax u ishodistu. Mnogostrukosti W S(0), WU(0) i WC(0) su
45

redom globalna stabilna, nestabilna i centralna mnogostrukost sustava x′ = f(x) iklase su Cr.
Slika 3.5.
Primjer 3.6 Promotrimo sustav {x′ = x2
y′ = −y .
Iz dydx
= − yx2
dobivamo y = Ce1x . Imamo po dvije orbite sustava na x i y-osi.
Primijetimo jos da je limx→+∞ y(x) = C, limx→0+ y(x) = +∞, limx→0− y(x) = 0,limx→−∞ y(x) = C. Na temelju toga mozemo skicirati fazni dijagram (slika 3.5).
Linearizirani sustav pridruzen zadanom sustavu ima matricu A =
(0 00 −1
).
Svojstvene vrijednosti te matrice su 0 i -1 te sustav prema Teoremu o centralnojmnogostrukosti ima netrivijalnu globalnu stabilnu i centralnu mnogostrukost. Lakoje vidjeti da je centralni potprostor sustava x′ = Ax jednak x−osi, dok je stabilanpotprostor jednak y-osi. Primjecujemo da je y-os invarijantna na tok sustava te jeona ujedno i stabilna mnogostrukost zadanog nelinearnog sustava. Nadalje, kako jelimx→0− y
′(x) = limx→0−−Cx2e1/x = {t = 1/x} = limt→−∞ t
2et = 0, bilo koja orbitakoja pripada drugom kvadrantu zajedno s ishodistem i orbitom koja je jednaka pozi-tivnoj x-osi cini mnogostrukost koja je tangencijalna na centralan potprostor sustavax′ = Ax u ishodistu. Opisana mnogostrukost je ocito invarijantna na tok sustava.Prema tome, svaka takva mnogostrukost predstavlja centralnu mnogostrukost danogsustava te ujedno zakljucujemo da centralna mnostrukost ne mora biti jedinstvena.
46

3.3 Lokalna topoloska ekvivalentnost sustava
Podsjetimo se da su dva autonomna sustava topolosko ekvivalentna ako postoji ho-meomorfizam koji preslikava orbite jednog u orbite drugog sustava i pritom cuvanjihovu orijentaciju. Ako su zadana dva sustava, ne postoji opcenito homeomor-fizam koji ima prethodno navedeno svojstvo. Medutim, za neke sustave mozemopronaci homeomorfizam koji tako djeluje lokalno, odnosno na nekoj okolini kriticnetocke i pritom preslikava dijelove orbita iz te okoline u dijelove orbita pripadnoglineariziranog sustava. O tome govori sljedeci rezultat za sustav reda 2:
Teorem 3.3 (Hartmann-Grobman) Neka je E ⊆ R2 otvoren skup koji sadrziishodiste te neka je f ∈ C1(R2)2 takva da je f(0) = 0. Neka matrica A = Df(0)nema svojstvenih vrijednosti s realnim dijelom nula. Tada postoji homeomorfizamH s nekog otvorenog skupa U ⊆ R2 koji sadrzi ishodiste u otvoren skup V ⊆ R2 kojitakoder sadrzi ishodiste, takav da za svaki x0 ∈ U postoji otvoren interval I(x0) ⊆ Roko nule za koji je
H(φt(x0)) = eAtH(x0) , t ∈ I(x0) .
Napomena 3.4 Primijetimo da se pri preslikavanju orbita sustava u orbite line-ariziranog sustava ne mijenja parametrizacija vremena.
Primjer 3.7 Neka je zadan sustav{x′ = x− y2y′ = −y .
Fazni dijagram sustava se nalazi na slici 3.1. Matrica lineariziranog sustava je(1 00 −1
)i svojstvene vrijednosti su joj 1 i -1. Prema Hartman-Grobmannovom teoremu pos-toje okoline U i V oko ishodista i homeomorfizam H koji preslikava dio faznog di-jagrama pocetnog sustava oko ishodista, koji se nalazi unutar skupa U , u dio faznogdijagrama njegovog lineariziranog sustava{
x′ = xy′ = −y ,
47

koji se nalazi unutar skupa V koji je okolina ishodista. Uzmimo da je H(x, y) =(x− 1
3y2, y
). Neka je (x, y) rjesenje prvog sustava. Slika tog rjesenja se dakle pres-
likava u sliku funkcije (x, y), koja je zadana s
x(t) = x(t)− 1
3y2(t) , y(t) = y(t) .
Tada je
x′(t) = x′(t)− 2
3y(t)y′(t) = (x(t)− y2(t)) +
2
3y2(t) = x(t)− 1
3y2(t) = x(t) ,
y′(t) = y′(t) = −y(t) = −y(t) .
Dakle, (x, y) je rjesenje lineariziranog sustava, odnosno H je trazeni homeomorfizamiz teorema 3.3. Primijetimo da homeomorfizam u ovom primjeru ne djeluje samolokalno vec da preslikava citav fazni dijagram nelinearnog sustava u fazni dijagrampripadnog linearnog sustava, odnosno ta dva sustava su topolosko ekvivalentna.
Nacrtajmo za kraj i fazni dijagram linearnog sustava. Imamo dydx
= − yx
iz cegaslijedi xy = C. Dakle, netrivijalne orbite se nalaze na x i y-osi te na hiperbolama(slika 3.6).
Slika 3.6.
48

Primjer 3.8 Pogledat cemo opet primjer{x′ = yy′ = x− x3 .
Pripadni linearizirani sustav je x′ = Ax, gdje je
A =
(0 11 0
).
Svojstvene vrijednosti matrice A su ±1 pa zadani sustav zadovoljava uvjete Hartmann-Grobmanovog teorema. Primijetimo da nije topolosko ekvivalentan svom linearizi-ranom sustavu jer mu fazni dijagram (slika 3.2) sadrzi periodicke orbite, koje nenalazimo u faznom dijagramu lineariziranog sustava kojem se orbite nalaze na dvapravca i hiperbolama y2−x2 = C (slika 3.7). Medutim, postoje okoline oko ishodistaoba fazna dijagrama na kojima prema Hartmann-Grobmanovom teoremu mozemonaci homeomorfizam koji preslikava orbite i cuva orijentaciju.
Slika 3.7.
49
Poglavlje 4
Klasifikacija kriticnih tocaka
U ovom poglavlju proucavamo vrste kriticnih tocaka, odnosno ponasanje orbita unjihovoj okolini. Nelinearnim sustavima se cesto pridruzuje pripadni lineariziranisustav koji je jednostavniji za rjesavanje i izucavanje. U nekim slucajevima dolazido promjene tipa kriticne tocke kod prijelaza s nelinearnog na linearni sustav.
4.1 Topoloska klasifikacija kriticnih tocaka planar-
nog sustava
Proucavat cemo kriticne tocke planarnih sustava, odnosno sustava reda 2 kojima jefazni dijagram prikaziv u ravnini. To su dakle sustavi oblika{
x′ = p(x, y)y′ = q(x, y)
. (4.1)
Razlikujemo nekoliko vrsta kriticnih tocaka, s obzirom na lokalno ponasanje orbitaoko njih. Imamo centar, cvor, fokus, centar-fokus i sedlo. U nastavku definiramote tocke. Ako je (x0, y0) 6= 0 kriticna tocka sustava, onda znamo da umjesto togsustava mozemo promatrati pridruzeni sustav kojem je kriticna tocka u ishodistu.Stoga cemo u nastavku radi jednostavnosti promatrati samo kriticnu tocku ishodiste.
Definicija 4.1 Neka je ishodiste kriticna tocka sustava (4.1). Kazemo da je is-hodiste centar ako postoji δ > 0 takav da je za svaki (x0, y0) ∈ B(0, δ) orbita kojapocinje u tocki (x0, y0) zatvorena krivulja u cijoj unutrasnjosti se nalazi ishodiste.
Na faznom dijagramu dakle mozemo uociti centar ako su orbite u nekoj okolinikriticne tocke zatvorene krivulje koje okruzuju kriticnu tocku.
Primjer 4.1 Znamo da su orbite sustava{x′ = −yy′ = x
50

koncentricne kruznice sa sredistem u ishodistu koje je kriticna tocka sustava. Prematome ishodiste je centar za dani sustav. Kako su sve orbite sustava kruznice okoishodista, ovdje se ne radi samo o lokalnom, nego i o globalnom ponasanju orbita.Za definiciju centra dovoljno nam je ipak da se orbite tako ponasaju samo u nekojokolini kriticne tocke.
U definiciji cvora i fokusa koristimo polarne koordinate tocke. S r = r(t, r0, ϕ0),ϕ = ϕ(t, r0, ϕ0) oznacavamo polarne koordinate rjesenja koje u t = 0 ima vrijednosts polarnim koordinatama (r0, ϕ0).
Definicija 4.2 Kazemo da je ishodiste stabilan fokus ako postoji δ > 0 takav da zatocku (x0, y0) = (r0 cosϕ0, r0 sinϕ0) ∈ B(0, δ) vrijedi
limt→+∞
r(t, r0, ϕ0) = 0 , limt→+∞
|ϕ(t, r0, ϕ0)| = +∞ .
S druge strane, ishodiste je nestabilan fokus ako vrijedi
limt→−∞
r(t, r0, ϕ0) = 0 , limt→−∞
|ϕ(t, r0, ϕ0)| = +∞ .
Uvjet na kut u definiciji fokusa govori nam da se orbite spiralno namataju oko is-hodista. U slucaju stabilnog fokusa to namatanje se vrsi prema kriticnoj tocki, a uslucaju nestabilnog fokusa od kriticne tocke.
Primjer 4.2 Zadan je sustav {x′ = ax+ byy′ = −bx+ ay
,
gdje je ab 6= 0.
Znamo da u polarnim koordinatama taj sustav mozemo zapisati u obliku r′ = ar,ϕ′ = −b. Dakle, orbite se za svaki b 6= 0 namataju spiralno oko ishodista (pred-znak od b samo utjece na smjer namatanja). S druge strane, ako je a > 0, imamonestabilan fokus, a za a < 0 stabilan fokus.
Definicija cvora je slicna definiciji fokusa, a razlikuje se u ponasanju kuta koji orbitecine s x-osi pri priblizavanju ili udaljavanju od ishodista.
Definicija 4.3 Kazemo da je ishodiste stabilan cvor ako postoji δ > 0 takav da zatocku (x0, y0) = (r0 cosϕ0, r0 sinϕ0) ∈ B(0, δ) vrijedi
limt→+∞
r(t, r0, ϕ0) = 0
te ako postojilimt→+∞
ϕ(t, r0, ϕ0)
51

u [−∞,+∞].
Nadalje, ishodiste je nestabilan cvor ako vrijedi
limt→−∞
r(t, r0, ϕ0) = 0
te postojilimt→−∞
ϕ(t, r0, ϕ0) .
u [−∞,+∞].
Primjer 4.3 Neka je dan sustav{x′ = −2x+ yy′ = 2x− 3y
.
Svojstvene vrijednosti matrice sustava su -1 i -4, a pripadni svojstveni vektori(11
)i
(−1
2
)pa je rjesenje sustava dano s
x(t) = C1e−t − C2e
−4t ,
y(t) = C1e−t + 2C2e
−4t .
Sada je
limt→+∞
tgϕ(t) = limt→+∞
y(t)
x(t)= lim
t→+∞
C1 + 2C2e−3t
C1 − C2e−3t= 1 .
Dakle, za orbite sustava vrijedi ili limt→+∞ ϕ(t) = π4
ili limt→+∞ ϕ(t) = 5π4
. Kako seuz to orbite priblizavaju ishodistu za t→ +∞, ishodiste je stabilan cvor.
U okolini centar-fokusa (slika 4.1) neke orbite se ponasaju slicno orbitama u okolinicentra (odnosno radi se o zatvorenim krivuljama), a neke podsjecaju na orbite izokoline fokusa (jer se spiralno namataju oko kriticne tocke).
Definicija 4.4 Ishodiste je centar-fokus ako postoji niz krivulja (cn)n∈N takvih davrijede sljedeca svojstva:
i) krivulja cn+1 se nalazi unutar krivulje cn za svaki n ∈ N ;
ii) limn d(0, cn) = 0 ;
iii) izmedu svake dvije susjedne krivulje cn i cn+1 orbite se spiralno namatajuprema jednoj od njih i za t→ +∞ i za t→ −∞ .
52

Slika 4.1.
Prije sljedeceg primjera podsjetimo se da pri prijelazu u polarne koordinate za(x, y) 6= (0, 0) koristimo formule
r′ =xx′ + yy′
r, ϕ′ =
xy′ − yx′
r2.
Primijetimo jos da sustav oblika{x′ = −y + xg(x, y)y′ = x+ yg(x, y)
, (4.2)
gdje je g : E ⊆ R2 → R za E ⊆ R2 otvoren skup koji sadrzi ishodiste, u polarnomzapisu ima oblik {
r′ = rg(x, y)ϕ′ = 1
.
Takoder, mnozenjem prve jednadzbe s −y i druge s x dobivamo x2 + y2 = 0 pa je(x, y) = (0, 0) jedina kriticna tocka sustava.
Primjer 4.4 Zadan je sustav {x′ = p(x, y)y′ = q(x, y)
,
pri cemu je
p(x, y) =
−y + x√x2 + y2 sin
(1√x2+y2
), (x, y) 6= (0, 0)
0 , (x, y) = (0, 0)
q(x, y) =
x+ y√x2 + y2 sin
(1√x2+y2
), (x, y) 6= (0, 0)
0 , (x, y) = (0, 0).
53

Kao i prije mozemo zakljuciti da je (0, 0) jedina kriticna tocka sustava. Nadalje,kako je sustav oblika (4.2) lako je vidjeti da u polarnim koordinatama za r 6= 0 imajednadzbe r′ = r2 sin
(1r
), ϕ′ = 1. Primijetimo da je r′ = 0 za sin
(1r
)= 0, odnosno
za r = 1kπ
, k ∈ N. Dakle, kruznice s tim radijusima su orbite sustava. Vidimotakoder da je r′ > 0 za 1
r∈ 〈2kπ, (2k + 1)π〉, k ∈ N0, odnosno za
r ∈⟨
1
(2k + 1)π,
1
2kπ
⟩.
Dakle, izmedu kruznica radijusa 1(2k+1)π
i 12kπ
orbite su spirale koje se priblizavajukruznici veceg radijusa. Izmedu ostalih kruznica orbite su spirale koje se priblizavajukruznici manjeg radijusa. Radijus kruznica tezi u nulu kad k →∞ te zakljucujemoda je ishodiste centar-fokus za ovaj sustav.
Oznacimo sada f = (p, q). Dokazat cemo da je Df(0, 0) = A, gdje je
A =
(0 −11 0
).
Neka je h = (h1, h2) ∈ R2. Kako je
||f(h)− f(0)− Ah||||h||
=
∣∣∣∣∣∣∣∣(h1√h21 + h22 sin
(1√h21+h
22
), h2√h21 + h22 sin
(1√h21+h
22
))∣∣∣∣∣∣∣∣||h||
= ||h|| sin(
1
||h||
)≤ ||h|| ,
vrijedi
limh→0
f(h)− f(0)− Ah||h||
= 0 .
Dakle, linearizirani sustav zadanog sustava je zadan matricom A. Znamo da jeishodiste centar tog sustava. Dakle, pri prijelazu na linearni sustav mijenjaju sekarakteristike orbita u okolini ishodista.
Posljednji tip kriticne tocke koji promatramo je sedlo u cijoj okolini se nalaze orbitekoje mu se priblizavaju i u proslosti i u buducnosti, kao i orbite koje nemaju nijednood ta dva svojstva.
Definicija 4.5 Ishodiste je sedlo ako postoje dvije orbite koje mu se priblizavaju zat → +∞ i dvije koje mu se priblizavaju za t → −∞, te postoji okolina ishodistaza koju vrijedi da sve orbite, razlicite od prethodne cetiri, koje pocinju u toj okoliniizlaze iz nje i kad t→ +∞ i t→ −∞.
54

Primjer 4.5 Neka je dan sustav{x′ = 2x+ 5yy′ = 5x+ 2y
.
Svojstvene vrijednosti matrice sustava su -3 i 7. Pomocu pripadnih svojstvenih vek-tora dobivamo rjesenje sustava
x(t) = C1e−3t + C2e
7t ,
y(t) = −C1e−3t + C2e
7t .
Rjesenja za C1 = 0 daju dvije orbite na pravcu y = x koje se priblizavaju ishodistukad t → −∞, dok za C2 = 0 imamo dvije orbite na pravcu y = −x koje mu sepriblizavaju za t→ +∞. Za ostale orbite vrijedi
limt→±∞
||(x(t), y(t))|| =∞ .
Dakle, te orbite se ne zadrzavaju ni u jednom krugu oko ishodista. Zakljucujemo daje ishodiste sedlo.
4.2 Klasifikacija kriticnih tocaka na temelju svoj-
stvenih vrijednosti
Neke tipove kriticnih tocaka nelinearnog sustava x′ = f(x) reda n mozemo odrediti ipomocu svojstvenih vrijednosti matrice njegovog lineariziranog sustava. Neka je x0kriticna tocka sustava. Tada linearizacijom oko tocke x0 dobivamo sustav x′ = Ax,gdje je A = Df(x0). Sada imamo sljedecu definiciju.
Definicija 4.6 Kriticna tocka x0 je ponor sustava ako su sve svojstvene vrijednostimatrice Df(x0) takve da im je realan dio manji od nule. S druge strane, ako su svirealni dijelovi svojstvenih vrijednosti veci od nule, onda kriticnu tocku zovemo izvor.Konacno, hiperbolicka kriticna tocka x0 za koju matrica Df(x0) ima barem jednusvojstvenu vrijednost s realnim dijelom manjim od nule i barem jednu svojstvenuvrijednost s realnim dijelom vecim od nule naziva se sedlo.
Primijetimo da su i ponor i izvor i sedlo hiperbolicke tocke, odnosno tocke za kojeDf(x0) nema svojstvenih vrijednosti s realnim dijelom nula. Nadalje, u proslompoglavlju smo definirali sedlo za planarne sustave na topoloski nacin. Primijetimoda se ta definicija sedla podudara s prethodnom, jer prema Teoremu o stabilnojmnogostrukosti, za sedlo iz definicije 4.6 dobivamo karakteristike orbita koje odgo-varaju topoloskoj definiciji sedla 4.5.
55

Primjer 4.6 Promotrimo kriticne tocke sustava{x′ = y2 − x2 + 1y′ = −2y
.
Lako je vidjeti da sustav ima dvije kriticne tocke, (−1, 0) i (1, 0). Racunamo matricepripadnih lineariziranih sustava. Prvo imamo
Df(−1, 0) =
(2 00 −2
).
Svojstvene vrijednosti te matrice su 2 i -2 pa je kriticna tocka (−1, 0) hiperbolickatocka, preciznije sedlo.
Nadalje je
Df(1, 0) =
(−2 0
0 −2
),
odnosno matrica Df(1, 0) ima dvostruku svojstvenu vrijednost -2. Dakle, opet imamohiperbolicku tocku koja je i ponor sustava.
Prema tome, imamo dvije orbite koje se priblizavaju tocki (−1, 0), i dvije koje seudaljavaju od nje. Sve ostale orbite koje dodu u nekom trenutku blizu te tocke nepriblizavaju joj se ni u proslosti ni u buducnosti. S druge strane, postoji neka okolinaoko tocke (1, 0) takva da se sve orbite koje u njoj zapocinju priblizavaju toj tocki zat→ +∞.
4.2.1 Kriticne tocke planarnog linearnog sustava
Zadan je planarni sustav x′ = Ax. Odredit cemo tip kriticne tocke, tj. ishodista uovisnosti o svojstvenim vrijednostima λ1, λ2 matrice A ∈ M2(R). Kako je karakte-risticni polinom matrice A jednak kA(λ) = λ2 − (trA)λ+ detA, imamo
λ1,2 =1
2(tr(A)±
√(trA)2 − 4detA) .
Razlikujemo nekoliko slucajeva:
1. Neka su λ1, λ2 ∈ R takve da je λ1, λ2 > 0. To je ekvivalentno s (trA)2 −4detA ≥ 0, trA > 0, detA > 0. U ovom slucaju je ishodiste nestabilan cvor.
2. Neka su λ1, λ2 ∈ R takve da je λ1, λ2 < 0. To je ekvivalentno s (trA)2 −4detA ≥ 0, trA < 0, detA > 0. U ovom slucaju je ishodiste stabilan cvor.
3. Neka su λ1, λ2 ∈ R takve da je λ1 < 0 < λ2. To je ekvivalentno s detA < 0.U ovom slucaju je ishodiste sedlo.
56

4. Neka su λ1, λ2 ∈ C\R takve da je Re(λ1) > 0. To je ekvivalentno s (trA)2 −4detA < 0, trA > 0. U ovom slucaju je ishodiste nestabilan fokus.
5. Neka su λ1, λ2 ∈ C\R takve da je Re(λ1) < 0. To je ekvivalentno s (trA)2 −4detA < 0, trA < 0. U ovom slucaju je ishodiste stabilan fokus.
6. Neka su λ1, λ2 ∈ C\R takve da je Re(λ1) = 0. To je ekvivalentno s (trA)2 −4detA < 0, trA = 0. U ovom slucaju je ishodiste centar.
Primjer 4.7 Zadan je sustav {x′ = x+ 2yy′ = −x+ 3y
.
Matrica sustava ima svojstvene vrijednosti λ1,2 = 2± i. Svojstveni vektor svojstvenevrijednosti λ1 jednak je (
1− i1
)=
(11
)+ i
(−1
0
).
Pripadni zapis matrice pomocu Jordanove forme je A = PJP−1, gdje je
J =
(2 −11 2
), P =
(−1 1
0 1
).
Ako stavimo supstituciju (uv
)= P−1
(xy
),
dobivamo sustav (u′
v′
)= J
(uv
)koji u polarnim koordinatama ima zapis
r′ = 2r , ϕ′ = 1 .
Slike rjesenja (u, v) su dakle spirale koje se za t → +∞ udaljavaju od ishodista, tese namataju oko ishodista u pozitivnom smjeru. Orbite zadanog sustava dobivamopomocu transformacije (
xy
)= P
(uv
),
odnosno orbite ce i dalje biti spirale.
Primijetimo jos da ce tangente na spirale biti paralelne s x-osi za y′ = 0, odnosnou tockama u kojima spirale sijeku pravac y = 1
3x, dok ce tangente na spirale biti
paralelne s y-osi za x′ = 0, odnosno u presjecima spirala s pravcem y = −12x.
57

Primjer 4.8 Zadan je sustav {x′ = −x+ yy′ = −4x+ 3y
.
Lako je vidjeti da je 1 dvostruka svojstvena vrijednost sustava te da matricu sustavaA mozemo zapisati kao A = PJP−1, gdje je
P =
(1 12 3
), J =
(1 10 1
).
Tada je fundamentalna matrica sustava jednaka
eAt = PeJtP−1 =
(1 12 3
)(et tet
0 et
)(3 −1−2 1
)=
(et − 2tet tet
−4tet et + 2tet
).
Konacno, rjesenje sustava se moze zapisati kao
x(t) = C1(et − 2tet) + C2te
t ,
y(t) = −4C1tet + C2(e
t + 2tet) .
Kad t→ −∞ imamo x(t), y(t)→ 0. Takoder je
limt→−∞
y(t)
x(t)= lim
t→−∞
−4C1tet + C2(e
t + 2tet)
C1(et − 2tet) + C2tet
= limt→−∞
−4C1 + C2(1t
+ 2)
C1(1t− 2) + C2
=−4C1 + 2C2
−2C1 + C2
= 2 .
Prema tome, postoji okolina ishodista tako da orbita koja pocinje u tocki (x0, y0) =(r0 cosϕ0, r0 sinϕ0) u toj okolini ima svojstvo da postoji limt→−∞ ϕ(t, r0, ϕ0). Tajlimes je jedinstven, odnosno svaka orbita prilazi ishodistu pod istim kutom. Dakle,ishodiste je nestabilan cvor za zadani sustav.
Posve analogno se vidi da je limt→+∞y(t)x(t)
= 2 i limt→+∞ ||x(t)|| = +∞, limt→+∞ ||y(t)||= +∞. Dakle, orbita se u buducnosti priblizava kosoj asimptoti koja je istog nagibakao i kut upada u proslosti.
58

4.3 Odnos kriticnih tocaka linearnih i nelinearnih
sustava
Nelinearne sustave zbog njihove slozenosti cesto lineariziramo. Neka je zadan sustavx′ = f(x). Vidjeli smo vec da bez smanjenja opcenitosti mozemo pretpostaviti damu je ishodiste kriticna tocka. Tom sustavu pridruzujemo linearni sustav x′ = Axkojem je ishodiste takoder kriticna tocka. Pitamo se moze li doci do promjeneponasanja orbita linearnog sustava u okolini ishodista u odnosu na ponasanje orbitanelinearnog sustava. Pogledajmo primjer iz prethodnog poglavlja.
Primjer 4.9 Zadan je sustav {x′ = x− y2y′ = −y .
Iz faznog dijagrama na slici 3.1 je vidljivo da je ishodiste sedlo. Sada lineariziramosustav i dobivamo sustav
x′ = xy′ = −y .
Fazni dijagram vidimo na slici 3.6 te zakljucujemo da je ishodiste opet sedlo.
Opcenito imamo sljedeci rezultat.
Teorem 4.1 Neka je E ⊆ R2 otvoren skup koji sadrzi ishodiste. Neka je f ∈C1(E)2, A = Df(0), te neka je ishodiste hiperbolicka kriticna tocka sustava x′ =f(x). Tada je ishodiste sedlo sustava x′ = f(x) u toploskom smislu ako i samo akoje topolosko sedlo lineariziranog sustava x′ = Ax.
Primijetimo da je prethodna tvrdnja direktna posljedica Teorema o stabilnoj mno-gostrukosti.
Da bismo mogli zakljuciti da je kriticna tocka cvor i nelinearnog sustava i njegovoglineariziranog sustava, funkcija f treba imati vecu regularnost. Analogna tvrdnjavrijedi i ako je rijec o fokusu.
Teorem 4.2 Neka je E ⊆ R2 otvoren skup koji sadrzi ishodiste. Neka je f ∈C2(E)2, A = Df(0), te neka je ishodiste hiperbolicka kriticna tocka sustava x′ =f(x). Tada je ishodiste stabilan (nestabilan) cvor sustava x′ = f(x) ako i samoako je stabilan (nestabilan) cvor sustava x′ = Ax. Takoder, ishodiste je stabilan(nestabilan) fokus sustava x′ = f(x) ako i samo ako je stabilan (nestabilan) fokussustava x′ = Ax.
Sljedeci primjer pokazuje kako uvjet f ∈ C1(E)2 ne bi bio dovoljan u prethodnomteoremu.
59

Primjer 4.10 Zadan je sustav {x′ = p(x, y)y′ = q(x, y)
,
pri cemu je
p(x, y) =
{−x− y
ln(√x2+y2)
, (x, y) 6= (0, 0)
0 , (x, y) = (0, 0)
q(x, y) =
{−y + x
ln(√x2+y2)
, (x, y) 6= (0, 0)
0 , (x, y) = (0, 0).
Uvodenjem polarnih koordinata dobivamo jednadzbe sustava
r′ = −r , ϕ′ =1
ln r.
Iz prve jednadzbe dobivamo r(t) = r0e−t. Uvrstavanjem u drugu imamo ϕ′ = 1
ln r0−tpa je
ϕ(t) = − ln | ln r0 − t|+ ln | ln r0|+ ϕ0 .
Promatramo ponasanje orbita u okolini ishodista pa mozemo pretpostaviti da je0 < r0 < 1, odnosno ln r0 < 0. Rjesenje je definirano za t ∈ 〈ln r0,∞〉. Primi-jetimo da za t → +∞ imamo |ϕ(t)| → ∞ te r(t) → 0. Prema tome, ishodiste jestabilan fokus.
Funkcija (p, q) je ocito neprekidna na citavom R2. Slicno kao u primjeru 4.4 doka-zujemo da je Df(0) = −I. Dakle, ishodiste je stabilan cvor za linearizirani sustav.Nadalje, imamo∣∣∣∣∂p(x, y)
∂x+ 1
∣∣∣∣ =
∣∣∣∣∣ xy
(x2 + y2) ln2(√x2 + y2)
∣∣∣∣∣ ≤ 1
2
∣∣∣∣∣ 1
ln2(√x2 + y2)
∣∣∣∣∣ .Izraz na desnoj strani tezi u nulu kad (x, y) → (0, 0). Prema tome, parcijalnaderivacija ∂p
∂xje neprekidna i u (0, 0). Analogno provjeravamo neprekidnost ostalih
derivacija. Konacno, funkcija (p, q) je klase C1 na R2. S obzirom da tip kriticnetocke nije ocuvan kod prijelaza na linearizirani sustav, zakljucujemo da desna stranazadanog sustava nije funkcija klase C2.
Teorem 4.3 Neka je E ⊆ R2 otvoren skup koji sadrzi ishodiste. Neka je f ∈C1(E)2, A = Df(0), te neka je ishodiste kriticna tocka sustava x′ = f(x). Ako jeishodiste centar sustava x′ = Ax, tada je ishodiste ili centar ili fokus ili centar-fokussustava x′ = f(x).
60

Primjer 4.11 Zadan je sustav{x′ = −y + x(x2 + y2)y′ = x+ y(x2 + y2)
.
Prijelazom u polarne koordinate dobivamo
r′ = r3 , ϕ′ = 1 .
Dakle imamo r−3dr = dt te dobivamo −12r−2 = t+C. Konacno iz r(0) = r0 imamo
r(t) =
(−2t+
1
r20
)− 12
.
Dakle, r je definiran za t ∈⟨−∞, 1
2r20
⟩. Kad t → −∞, r(t) → 0. Imamo i
ϕ(t) = t + ϕ0 pa je limt→−∞ |ϕ(t)| = ∞. Dakle, ishodiste je nestabilan fokus sus-tava.
Linearizirani sustav je zadan matricom A, gdje je
A =
(0 −11 0
).
Tom sustavu je ishodiste centar, te opet imamo razliku u tipu kriticne tocke neline-arnog sustava i njegovog lineariziranog sustava.
Prisjetimo se da smo u primjeru 4.4 imali sustav kojem je ishodiste bio centar-fokus,dok je njegov linearizirani sustav u ishodistu imao centar.
Promotrimo sada jedan specijalan tip sustava.
Definicija 4.7 Kazemo da je sustav{x′ = p(x, y)y′ = q(x, y)
(4.3)
simetrican u odnosu na x-os ako je invarijantan u odnosu na transformaciju (t, y) 7→(−t,−y). Takoder, sustav (4.3) je simetrican s obzirom na y-os ako je invarijantans obzirom na transformaciju (t, x) 7→ (−t,−x).
Pretpostavimo sada da je sustav (4.3) simetrican u odnosu na x-os. Uzmimo nekonjegovo rjesenje (x, y). Definirajmo funkciju (x, y) s (x(t), y(t)) = (x(−t),−y(−t)).Tada je i funkcija (x, y) rjesenje sustava (4.3). Dakle imamo
p(x(t), y(t)) = x′(t) = −x′(−t) = −p(x(−t), y(−t)) = −p(x(t),−y(t)) ,
61

q(x(t), y(t)) = y′(t) = y′(−t) = q(x(−t), y(−t)) = q(x(t),−y(t)) .
Prema tome, ako za (p, q) vrijedi p(x,−y) = −p(x, y) i q(x,−y) = q(x, y), onda jesustav (4.3) simetrican s obzirom na x-os.
Posve analogno dolazimo do zakljucka da ako vrijedi p(−x, y) = p(x, y) i q(−x, y) =−q(x, y), onda je sustav (4.3) simetrican u odnosu na y-os. Tada je za rjesenje(x, y) sustava (4.3), funkcija (x, y) definirana s (x(t), y(t)) = (−x(−t), y(−t)) takoderrjesenje istog sustava.
Sad imamo sljedeci rezultat
Teorem 4.4 Neka je E ⊆ R2 otvoren skup koji sadrzi ishodiste i neka je f ∈ C1(E)2
takva da je f(0) = 0. Neka je sustav x′ = f(x) simetrican s obzirom na x-os iliy-os. Ako je ishodiste centar lineariziranog sustava x′ = Ax, gdje je A = Df(0),onda je ishodiste centar i sustava x′ = f(x).
Primjer 4.12 Pogledajmo sustav{x′ = −y − xyy′ = x
.
Ovdje je p(x, y) = −y − xy pa je p(x,−y) = −p(x, y). Takoder je q(x, y) = xte je q(x,−y) = q(x, y). Dakle, zadani sustav je simetrican s obzirom na x-os.Linearizirani sustav zadan je matricom(
0 −11 0
)pa je ishodiste centar linearnog sustava. Primjenom teorema 4.4 zakljucujemo da jeishodiste i centar zadanog sustava. Uvjerimo se u to i crtanjem faznog dijagramatog sustava. Iz jednadzbi sustava dobivamo da orbite pripadaju krivuljama
y2 = 2(−x+ ln |1 + x|+ C) ,
za neku konstantu C ∈ R. Dakle, crtamo dijelove tih krivulja za koje je x − C ≤ln |1 + x| (Slika 4.2). Imamo i orbitu x = −1. Pripadni fazni dijagram nalazi se naSlici 4.3.
Primjer 4.13 Sada promatramo poznati problem iz biologije, tzv. plijen-grabezljivacmodel. S g = g(t) oznacavamo funkciju koja prati broj grabezljivaca u nekoj popu-laciji. S druge strane, p = p(t) je broj zivotinja u populaciji koje su plijen. Pos-tavljamo sljedeci sustav diferencijalnih jednadzbi koji opisuje medusobnu ovisnost tedvije velicine: {
p′ = αp(1− p
k
)− βgp
g′ = γgp− δg ,
62
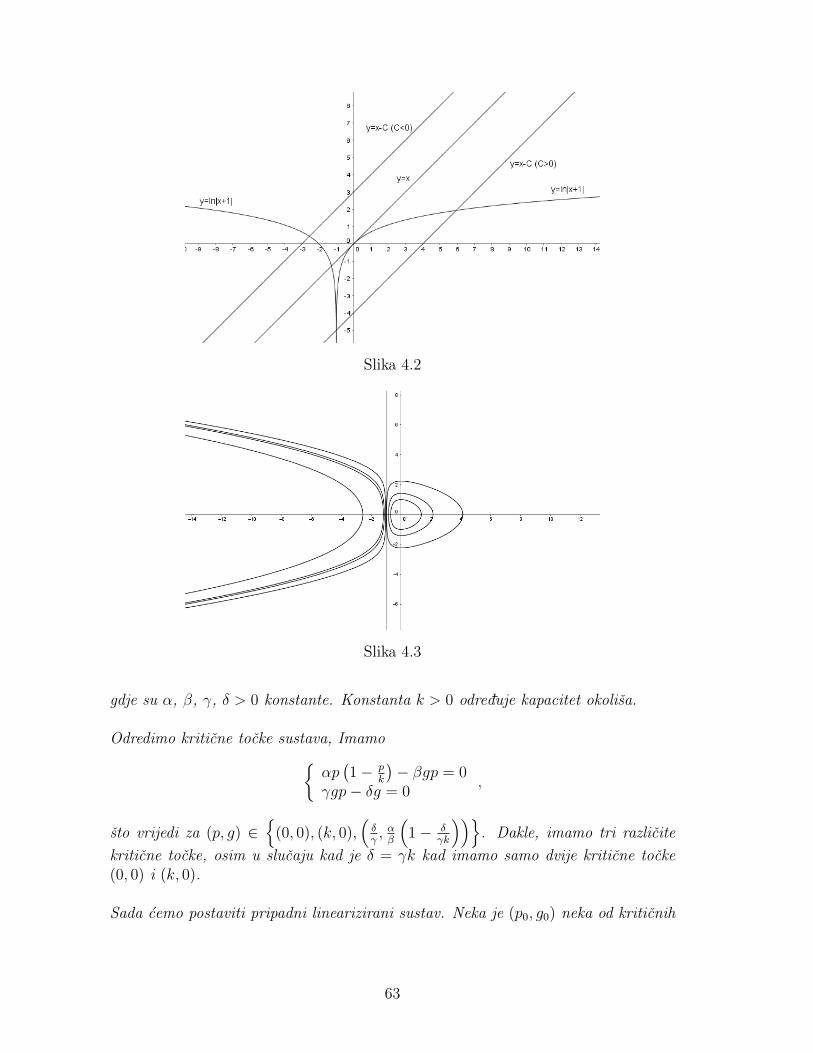
Slika 4.2
Slika 4.3
gdje su α, β, γ, δ > 0 konstante. Konstanta k > 0 odreduje kapacitet okolisa.
Odredimo kriticne tocke sustava, Imamo{αp(1− p
k
)− βgp = 0
γgp− δg = 0,
sto vrijedi za (p, g) ∈{
(0, 0), (k, 0),(δγ, αβ
(1− δ
γk
))}. Dakle, imamo tri razlicite
kriticne tocke, osim u slucaju kad je δ = γk kad imamo samo dvije kriticne tocke(0, 0) i (k, 0).
Sada cemo postaviti pripadni linearizirani sustav. Neka je (p0, g0) neka od kriticnih
63

tocaka. Pripadni linearni sustav je odreden matricom A(p0, g0), gdje je
A(p0, g0) =
(α− 2αp0
k− βg0 −βp0
γg0 γp0 − δ
).
Proucit cemo ponasanje orbita u okolini trece kriticne tocke. Imamo
A
(δ
γ,α
β
(1− δ
γk
))=
(−αδγk
−βδγ
αγβ
(1− δ
γk
)0
).
Sada je
trA =−αδγk
, detA = αδ
(1− δ
γk
).
Kako je detA > 0, imamo ili kompleksno konjugirane svojstvene vrijednosti matriceA ili realne vrijednosti istog predznaka. Iz trA < 0, vidimo da imamo ili negativnesvojstvene vrijednosti ili svojstvene vrijednosti s realnim dijelom manjim od nule.Prema tome, ishodiste je za linearizirani sustav ili stabilan cvor ili stabilan fokus.U slucaju stabilnog fokusa, vrijednosti obje populacije se priblizavaju vrijednostimakriticne tocke i pritom osciliraju oko tog ravnoteznog polozaja. Zakljucujemo i da jepromatrana kriticna tocka stabilan cvor ili stabilan fokus i za nelinearni sustav.
Primjer 4.14 Sad opet promatramo gibanje matematickog njihala, ali uz otpor zraka.Tada je jednadzba njihala mase m, na kojeg djeluju sila teza, napetost stapa i otporzraka, dana s
m~a = ~Fg + ~N + ~Fot ,
gdje sila otpora djeluje suprotno od smjera gibanja i proporcionalna je brzini njihala,s konstantom proporcionalnosti κ. U polarnim koordinatama jednadzbe gibanja glase
m
[(r′′ − r(ϕ′)2)~r0 +
1
r
d
dt(r2ϕ′)~ϕ0
]= mg(cosϕ~r0−sinϕ~ϕ0)−N~r0−κ(r′~r0+rϕ′~ϕ0) .
Prema tome, imamom`ϕ′′ = −mg sinϕ− κ`ϕ′ ,
odnosnoϕ′′ = −g
`sinϕ− κ
mϕ′ .
Neka je sad x = ϕ, y = ϕ′. Dobivamo sustav{x′ = yy′ = −g
`sinx− κ
my.
Kriticne tocke ovog sustava su tocke oblika (kπ, 0), k ∈ Z. Matrica lineariziranogsustava oko tocke (kπ, 0) glasi
A =
(0 1
−g`(−1)k − κ
m
).
64

Primijetimo da je trA = − κm< 0 i detA = g
`(−1)k pa je detA > 0 za k paran i
detA < 0 za k neparan. Dakle, ako je k paran, mozemo imati svojstvene vrijed-nosti matrice A koje su obje negativne, ili su konjugirano kompleksne svojstvenevrijednosti s negativnim realnim dijelovima. U prvom slucaju, kriticna tocka (kπ, 0)je stabilan cvor, dok je u drugom slucaju stabilan fokus. Fokus cemo imati ako je(trA)2 − 4detA = κ2
m2 − 4gl< 0, odnosno za κ < 2m
√g`. Dakle, otpor zraka mora
biti dovoljno malen da bismo u okolini tih tocaka zadrzali spiralno gibanje orbita.U tom slucaju njihalo oscilira oko najnizeg moguceg polozaja s brzinom koja teziprema nuli, odnosno imamo prigusene oscilacije. U slucaju da je otpor zraka pre-velik (κ > 2m
√g`), njihalo se priblizava prema najnizem polozaju sa sve manjom
brzinom. Nakon nekog vremena ne moze vise proci kroz najnizi polozaj. Prisjetimose da je za male otklone i brzine, u slucaju kad nismo imali otpor, njihalo periodickiprolazilo kroz najnizi polozaj i pritom mu je brzina uvijek bila ista.Ako je k neparan, onda imamo dvije realne svojstvene vrijednosti s razlicitim pred-znacima te je kriticna tocka (kπ, 0) sedlo. Kvalitativno gledajuci, ponasanje njihalaoko najviseg moguceg polozaja se nije bitno promijenilo u odnosu na situaciju kadsmo imali gibanje bez otpora jer smo i u tom slucaju imali sedlo.
65

Poglavlje 5
Hamiltonovi i gradijentni sustavi
Vazne klase sustava koje se pojavljuju u primjenama su Hamiltonovi i gradijentnisustavi.
5.1 Hamiltonovi sustavi
Definiramo ih na sljedeci nacin:
Definicija 5.1 Neka je H = H(x, y) ∈ C2(E), pri cemu je E ⊆ R2n otvoren skup,dok su x, y ∈ Rn. Tada je Hamiltonov sustav sustav oblika{
x′ = ∂H∂y
y′ = −∂H∂x
.
Primijetimo da na nekoj orbiti (x, y) = (x(t), y(t)) vrijedi
dH(x(t), y(t))
dt=∂H(x(t), y(t))
∂x· x′(t) +
∂H(x(t), y(t))
∂y· y′(t)
=∂H(x(t), y(t))
∂x· ∂H(x(t), y(t))
∂y− ∂H(x(t), y(t))
∂y· ∂H(x(t), y(t))
∂x= 0 .
Prema tome, funkcija H je konstantna na orbiti (x, y).
Uzmimo sada planarni Hamiltonov sustav s kriticnom tockom (0, 0). Njegov pri-padni linearizirani sustav je zadan matricom
A =
(∂2H∂x∂y
(0, 0) ∂2H∂y2
(0, 0)
−∂2H∂x2
(0, 0) − ∂2H∂y∂x
(0, 0)
).
Tada je
detA =∂2H
∂y2(0, 0) · ∂
2H
∂x2(0, 0)−
(∂2H
∂x∂y(0, 0)
)2
,
66

dok je tr(A) = 0.
Pretpostavimo da je detA 6= 0. Tada imamo dvije mogucnosti, ili su svojstvenevrijednosti matrice A realni brojevi s razlicitim predznakom (u slucaju detA < 0)ili su kompleksni brojevi s realnim dijelom nula (u slucaju detA > 0).
U prvom slucaju je ishodiste sedlo lineariziranog sustava pa je sedlo i zadanog Ha-miltonovog sustava. U drugom slucaju ishodiste je centar lineariziranog sustava paishodiste moze biti centar, fokus ili centar-fokus zadanog sustava. Pretpostavimo daje fokus. Neka se, bez smanjenja opcenitosti, radi o stabilnom fokusu. Tada postojiδ > 0 takav da za (x0, y0) = (r0 cosϕ0, r0 sinϕ0) ∈ B(0, δ) vrijedi
limt→+∞
r(t, r0, ϕ0) = 0 , limt→+∞
|ϕ(t, r0, ϕ0)| = +∞ .
Neka je (x, y) rjesenje koje pocinje u tocki (x0, y0) ∈ B(0, δ). Tada je zbog konstant-nosti funkcije H na toj orbiti H(x(t), y(t)) = H(x0, y0), za svaki t ∈ R. No, zbog ne-prekidnosti funkcije H je limt→+∞H(x(t), y(t)) = H(0, 0) pa je H(x0, y0) = H(0, 0).Prema tome, (0, 0) nije tocka strogog ekstrema funkcije H.
Primijetimo da je ishodiste stacionarna tocka funkcije H. Hesseova matrica funkcijeH u (0, 0) je matrica
H =
(∂2H∂x2
(0, 0) ∂2H∂x∂y
(0, 0)∂2H∂x∂y
(0, 0) ∂2H∂y2
(0, 0)
),
cija je determinanta jednaka detA.
Pretpostavimo sada da je ∂2H∂x2
(0, 0) = 0. Tada je detA = −(∂2H∂x∂y
(0, 0))2≤ 0,
sto je kontradikcija s pretpostavkom. Dakle, prema Sylvesterovom kriteriju, He-sseova matrica je ili pozitivno (u slucaju ∂2H
∂x2(0, 0) > 0) ili negativno (u slucaju
∂2H∂x2
(0, 0) < 0) definitna. Prema tome, (0, 0) je tocka strogog lokalnog ekstremafunkcije H sto je kontradikcija s prethodno dokazanim svojstvom ishodista. Za-kljucujemo da ishodiste tada moze biti samo centar ili centar-fokus.
5.2 Gradijentni sustavi
Za sustav x′ = f(x) kazemo da je gradijentan ako postoji funkcija h ∈ C2(E), gdjeje E ⊆ Rn otvoren skup, takva da je f = −∇h. Ako je ∇h(x0) 6= 0, onda jex0 regularna tocka funkcije h. Plohe oblika h(x) = C, gdje je C neka konstanta,nazivamo razinskim plohama funkcije h. Vrijedi sljedeci rezultat:
Teorem 5.1 Neka je dan gradijentni sustav x′ = −∇h(x). U regularnim tockamafunkcije h orbite sustava su okomite na razinske plohe funkcije h.
67

Dokaz. Neka je x0 neka regularna tocka funkcije h. Tada je ∇h(x0) 6= 0. Uz-mimo rjesenje x = x(t) za koje je x(0) = x0. Vrijedi x′(t) = −∇h(x(t)), odnosnox′(0) = −∇h(x0). Vektor −∇h(x0) je dakle tangencijalni vektor na orbitu rjesenjax u tocki x0. S druge strane, vektor ∇h(x0) je vektor normale na razinsku plohuh(x) = h(x0) koja prolazi kroz tocku x0. Prema tome, promatrana orbita i razinskaploha su okomite u tocki x0. �
Primjer 5.1 Neka je h zadana s h(x, y) = x2 + y2. Tada je pripadni gradijentnisustav dan s {
x′ = −2xy′ = −2y
.
Znamo da netrivijalne orbite tog sustava pripadaju pravcima koji prolaze kroz is-hodiste. S druge strane, razinske plohe funkcije h su plohe x2 + y2 = C, odnosnokruznice sa sredistem u ishodistu koje su ocito okomite na orbite sustava u svakojtocki (x, y) 6= (0, 0).
Promotrimo sada dva medusobno ortogonalna planarna sustava. Konkretno, sus-tavu {
x′ = P (x, y)y′ = Q(x, y)
(5.1)
pridruzujemo njegov ortogonalni sustav koji glasi{x′ = Q(x, y)y′ = −P (x, y)
. (5.2)
Ako se orbite ta dva sustava sijeku u tocki (x0, y0), tangencijalni vektori na te orbitesu redom (P (x0, y0), Q(x0, y0)) i (Q(x0, y0),−P (x0, y0)) koji su ortogonalni. Dakle,orbite se u toj tocki sijeku pod pravim kutom.
Primijetimo ako je prvi sustav Hamiltonov, odnosno ako je P (x, y) = ∂H∂y
i Q(x, y) =
−∂H∂x
, onda je desna strana drugog sustava jednaka −∇H(x, y) pa je taj sustav gra-dijentni. Prema tome, Hamiltonov sustav i njegov pridruzeni gradijentni sustavmedusobno su ortogonalni sustavi.
Primjer 5.2 Uzmimo sustav {x′ = −yy′ = 2x
.
Lako je vidjeti da se netrivijalne orbite ovog sustava podudaraju s elipsama tipa
x2 +y2
2= C .
68

Slika 5.1.
Sustav koji je ortogonalan na prethodni je{x′ = 2xy′ = y
.
Njegove netrivijalne orbite su na krivuljama oblika y = C√|x|. Na slici 5.1 vidimo
da se orbite ta dva sustava sijeku pod pravim kutom.
Neka je sada (0, 0) kriticna tocka sustava (5.1) i (5.2) te neka su A i B redommatrice njihovih lineariziranih sustava oko tocke (0, 0). Tada je
A =
(∂P∂x
(0, 0) ∂P∂y
(0, 0)∂Q∂x
(0, 0) ∂Q∂y
(0, 0)
), B =
(∂Q∂x
(0, 0) ∂Q∂y
(0, 0)
−∂P∂x
(0, 0) −∂P∂y
(0, 0)
).
Neka je (0, 0) sedlo linearnog sustava s matricom A. Tada je detA < 0. Kako jedetB = detA, zakljucujemo da je (0, 0) sedlo i sustava odredenog matricom B. Zbogregularnosti desne strane sustava (5.1) i (5.2), ishodiste je onda sedlo i tih sustava.
Pretpostavimo sad je (0, 0) centar sustava s matricom A. Tada je trA = 0 i detA > 0.Dalje racunamo
(trB)2 − 4detB =(∂Q
∂x(0, 0)− ∂P
∂y(0, 0)
)2
−4
(−∂Q∂x
(0, 0)∂P
∂y(0, 0) +
∂Q
∂y(0, 0)
∂P
∂x(0, 0)
)69

(∂Q
∂x(0, 0) +
∂P
∂y(0, 0)
)2
− 4∂Q
∂y(0, 0)
∂P
∂x(0, 0)
=
(∂Q
∂x(0, 0) +
∂P
∂y(0, 0)
)2
+ 4
(∂P
∂x(0, 0)
)2
≥ 0 , (5.3)
pri cemu smo koristili jednakost
∂Q
∂y(0, 0) = −∂P
∂x(0, 0) .
Iz (5.3) zakljucujemo da je (0, 0) cvor linearnog sustava s matricom B.
70

Poglavlje 6
Atraktori i granicne tocke
U ovom poglavlju objasnjavamo jos neke od osnovnih pojmova vezanih uz strukturufaznih dijagrama autonomnih sustava.
6.1 Skupovi privlacenja i atraktori
Za pocetak definiramo skup privlacenja sustava:
Definicija 6.1 Neka je dan sustav x′ = f(x), gdje je f : E ⊆ Rn → Rn. Zatvorenskup A ⊂ E, invarijantan na tok sustava, zovemo skup privlacenja ako postoji oko-lina U tog skupa takva da za svaki x0 ∈ U vrijedi φ(t, x0) ∈ U , t ≥ 0 te φ(t, x0)→ A,kad t→ +∞, odnosno
limt→+∞
d(φ(t, x0), A) = 0 .
Takoder, definiramo i atraktor sustava:
Definicija 6.2 Ako skup privlacenja A sadrzi orbitu Γ koja je u njemu gusta, od-nosno ako je Γ = A, kazemo da je A atraktor sustava.
Primjer 6.1 Zadan je sustav {x′ = −xy′ = −y .
Fazni dijagram sustava sadrzi kriticnu tocku koja se nalazi u ishodistu, a ostale or-bite leze na pravcima kroz ishodiste. Ocito je da se sve orbite priblizavaju ishodistupa je ishodiste skup privlacenja. Kako se taj skup sastoji od samo jedne orbite, onje i atraktor.
Uzmimo jos neku orbitu Γ, npr. Γ = {(x, x) : x > 0}. Pogledajmo skup
A = {(x, x) : x > 0} ∪ (0, 0) .
71

Kako za svaki (x0, y0) ∈ R2 vrijedi limt→+∞ φ(t, x0, y0) = (0, 0), imamo i
limt→+∞
d(φ(t, x0, y0), A) = 0 .
Prema tome, i A je skup privlacenja. Pritom je orbita Γ gusta u A pa je A i atraktor.
Primjer 6.2 Zadan je sustav{x′ = −y − x(
√x2 + y2 − 1)
y′ = x− y(√x2 + y2 − 1)
.
Prijelazom na polarne koordinate dobivamo
r′ = −r(r − 1) , ϕ′ = 1 .
Prema tome kruznica r = 1 je orbita sustava. Imamo i kriticnu tocku (0, 0). Sveostale orbite su spirale koje se priblizavaju kruznici r = 1. Tada zakljucujemo da jer = 1 skup privlacenja za zadani sustav, a kako se sastoji od jedne orbite, ocito je iatraktor.
Primjer 6.3 Odredimo sada skupove privlacenja i atraktore sustavax′ = −y + x(1− x2 − y2 − z2)y′ = x+ y(1− x2 − y2 − z2)z′ = 0
.
Prvo primjecujemo da su sve tocke na osi z kriticne tocke. Iz trece jednadzbe sustavadobivamo da je z(t) = C, gdje je C neka konstanta. To znaci da je svaka ravninaparalelna s xy-ravninom invarijantna na tok sustava. Za odabrani C rjesavamosustav od prve dvije jednadzbe. Uvodimo polarne koordinate te dobivamo
r′ = r(1− r2 − C2) , ϕ′ = 1 .
Primijetimo da je r′ = 0 za r =√
1− C2 ako je |C| ≤ 1. Pogledajmo tri slucaja:
1. Ako je |C| = 1, imamo jednadzbu r′ = −r3. To znaci da u ravninama z = 1i z = −1 imamo kriticne tocke (0, 0, 1) i (0, 0,−1) redom, dok se sve ostaleorbite spiralno namataju prema tim kriticnim tockama.
2. Ako je |C| > 1, onda je r′ < 0 pa imamo istu situaciju kao i u prethodnomslucaju (razlika je samo u brzini priblizavanja spirale).
72

3. Ako je |C| < 1, u pripadnoj ravnini z = C imamo kruznu orbitu r =√
1− C2.Za r <
√1− C2 je r′ > 0, dok za r >
√1− C2 vrijedi r′ < 0. To znaci
da osim kruznice i kriticne tocke (0, 0, C), imamo i spirale u ravnini z = Ckoje se namataju prema kruznici ako zapocinju u njezinoj unutrasnjosti, dokse spirale koje pocinju izvan kruznice takoder namataju prema kruznici.
Primijetimo jos da sve tocke koje leze na orbitama koje su kruznice zapravo pripa-daju jedinicnoj sferi S2 sa sredistem u ishodistu sustava. Iz faznog dijagrama sadamozemo vidjeti da je ta sfera zajedno s dijelom z-osi koji ne pripada unutrasnjostisfere jedan skup privlacenja za sustav. S obzirom da nije zatvarac samo jedne orbite,nije atraktor.
Primjer 6.4 Odredimo i skupove privlacenja i atraktore sustavax′ = −y + x(1− x2 − y2)y′ = x+ y(1− x2 − y2)z′ = α
,
uz pretpostavku α 6= 0.
Prvo mozemo primijetiti da sustav nema kriticnih tocaka te da je z(t) = αt + z0.Prve dvije jednadzbe daju r′ = r(1 − r2), ϕ′ = 1. Vidimo da je r′ = 0 za r = 1,no s obzirom da je uvijek z′ > 0 ili z′ < 0, ne postoje orbite koje su kruznice, negomozemo zakljuciti da orbite koje zapocinju na cilindru {(x, y, z) ∈ R3 : x2 +y2 = 1}u potpunosti pripadaju tom cilindru, odnosno cilindar je invarijantan na tok sustava.Za |r| < 1 je r′ > 0, a za |r| > 1 je r′ < 0 pa se sve ostale orbite spiralno namatajuprema cilindru (i pritom se spustaju za α < 0 ili se podizu za α > 0). Opet mozemozakljuciti da je cilindar skup privlacenja, ali nije atraktor.
Atraktori u pravilu mogu biti vrlo komplicirani skupovi kao sto se dogada npr. uslucaju Lorenzovog sustava koji je dosta cest u primjenama.
Primjer 6.5 Opci oblik Lorenzovog sustava glasix′ = α(y − x)y′ = βx− y − xzz′ = −γz + xy
,
a pripadni atraktor mozemo vidjeti na slici 6.1.
73
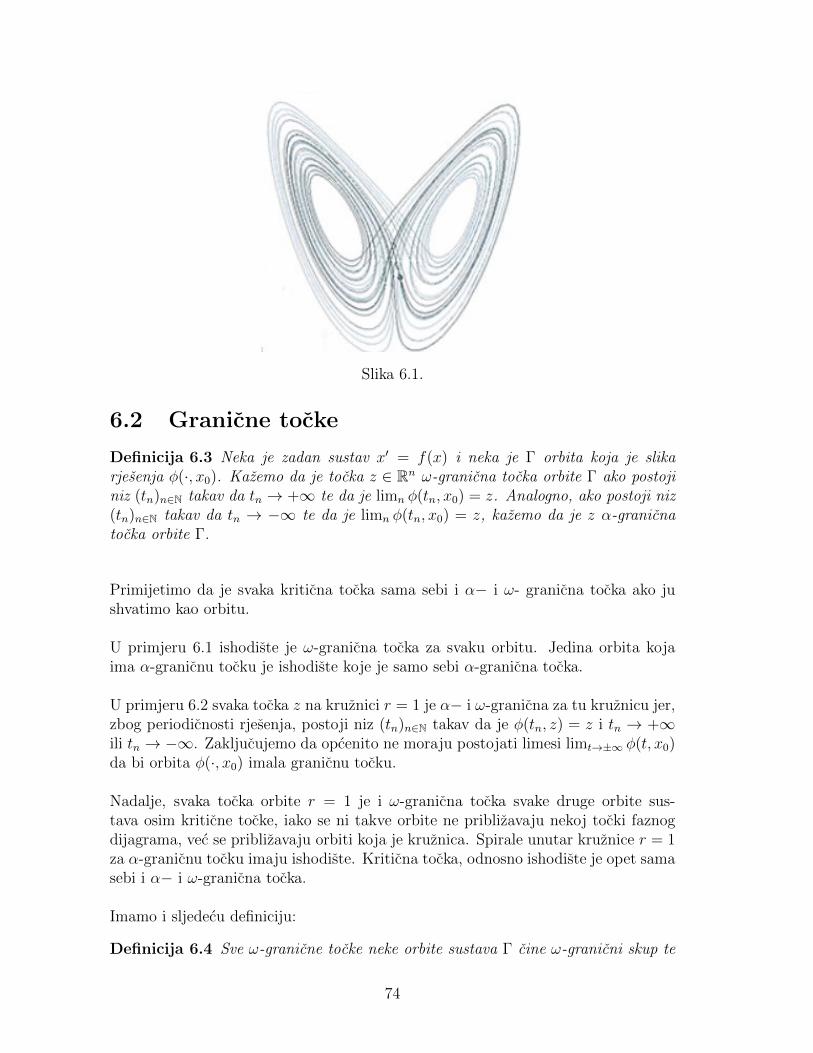
Slika 6.1.
6.2 Granicne tocke
Definicija 6.3 Neka je zadan sustav x′ = f(x) i neka je Γ orbita koja je slikarjesenja φ(·, x0). Kazemo da je tocka z ∈ Rn ω-granicna tocka orbite Γ ako postojiniz (tn)n∈N takav da tn → +∞ te da je limn φ(tn, x0) = z. Analogno, ako postoji niz(tn)n∈N takav da tn → −∞ te da je limn φ(tn, x0) = z, kazemo da je z α-granicnatocka orbite Γ.
Primijetimo da je svaka kriticna tocka sama sebi i α− i ω- granicna tocka ako jushvatimo kao orbitu.
U primjeru 6.1 ishodiste je ω-granicna tocka za svaku orbitu. Jedina orbita kojaima α-granicnu tocku je ishodiste koje je samo sebi α-granicna tocka.
U primjeru 6.2 svaka tocka z na kruznici r = 1 je α− i ω-granicna za tu kruznicu jer,zbog periodicnosti rjesenja, postoji niz (tn)n∈N takav da je φ(tn, z) = z i tn → +∞ili tn → −∞. Zakljucujemo da opcenito ne moraju postojati limesi limt→±∞ φ(t, x0)da bi orbita φ(·, x0) imala granicnu tocku.
Nadalje, svaka tocka orbite r = 1 je i ω-granicna tocka svake druge orbite sus-tava osim kriticne tocke, iako se ni takve orbite ne priblizavaju nekoj tocki faznogdijagrama, vec se priblizavaju orbiti koja je kruznica. Spirale unutar kruznice r = 1za α-granicnu tocku imaju ishodiste. Kriticna tocka, odnosno ishodiste je opet samasebi i α− i ω-granicna tocka.
Imamo i sljedecu definiciju:
Definicija 6.4 Sve ω-granicne tocke neke orbite sustava Γ cine ω-granicni skup te
74
orbite. Oznacavamo ga s ω(Γ). Analogno, s α(Γ) oznacavamo sve α-granicne tockeorbite Γ. Konacno, granicni skup orbite Γ je skup ω(Γ) ∪ α(Γ).
U primjeru 6.2 zakljucili smo da je svaka tocka orbite r = 1 ω-granicna tocka svakespirale koja se priblizava toj kruznici. Tu tvrdnju mozemo i generalizirati:
Teorem 6.1 Neka je x0 neka ω-granicna tocka orbite Γ. Tada je i svaka tockaorbite φ(·, x0) ω-granicna tocka orbite Γ. Analogna tvrdnja vrijedi i za α-granicnetocke.
Dokaz. Neka je Γ slika rjesenja φ(·, z0). Tada postoji niz (tn)n∈N takav da φ(tn, z0)→x0 kad tn → +∞. Uzmimo sad neku tocku x s orbite koja pripada rjesenju φ(·, x0).Tada postoji τ ∈ R takav da je x = φ(τ, x0). Iz toga slijedi
x = φ(τ, limnφ(tn, z0)) .
Primijenimo sada Kamkeov teorem koji kaze da je rjesenje neprekidno u odnosu napocetni uvjet pa dobivamo
x = limnφ(τ, φ(tn, z0)) .
Konacno, primjenom Svojstva polugrupe proizlazi da je
x = limnφ(τ + tn, z0) .
Kako τ + tn → +∞, vidimo da je i tocka x ω-granicna tocka orbite Γ i time jetvrdnja dokazana.
Analogno mozemo dokazati i tvrdnju ako je x0 α-granicna tocka orbite Γ. �
Primijetimo da prethodni teorem zapravo tvrdi da su skupovi α(Γ) i ω(Γ) inva-rijantni na tok zadanog sustava. Pogledajmo jos jednu posljedicu prethodnog te-orema. Ako za neku orbitu postoji jedinstvena ω-granicna tocka, tada je ta granicnatocka i sama orbita zadanog sustava, odnosno kriticna tocka, jer bi inace postojalejos neke tocke na orbiti kojoj ona pripada i koje bi prema teoremu 6.1 bile takoderω-granicne. Isti rezultat vrijedi i ako promatramo α-granicne tocke.
Definicija 6.5 Neka je x0 ∈ ω(Γ) regularna tocka, odnosno tocka koja nije kriticnatocka sustava. Tada je orbita kroz x0 granicna orbita orbite Γ.
Zakljucujemo da se skupovi α(Γ) i ω(Γ) sastoje od kriticnih tocaka i od granicnihorbita.
Primijetimo da su stabilan cvor i stabilan fokus ω-granicne tocke za svaku orbitu
75

koja pocinje u nekoj njihovoj okolini. S druge strane, nestabilan cvor i fokus suα-granicne tocke za svaku orbitu kojoj je pocetna tocka u nekoj okolini danog cvora,odnosno fokusa. Nadalje, sedlo je ω-granicna tocka za dvije orbite iz svoje okolinete α-granicna tocka za takoder dvije orbite iz okoline.
Navedimo jos neke karakteristike skupova α(Γ) i ω(Γ).
Teorem 6.2 Neka je E ⊆ Rn otvoren skup te neka je f ∈ C1(E)n. Neka je Γ orbitasustava x′ = f(x). Ako je Γ sadrzana u kompaktnom podskupu od Rn, onda su α(Γ)i ω(Γ) neprazni, povezani i kompaktni podskupovi od E.
76
Poglavlje 7
Ciklusi autonomnog sustava
Ciklus sustava je orbita koja je zatvorena krivulja te nije kriticna tocka sustava.Dokazali smo da takve orbite odgovaraju periodickim rjesenjima.
7.1 Stabilnost ciklusa
Kao i kod kriticnih tocaka, mozemo proucavati stabilnost ciklusa. Ideja stabilnosti jeista, tj. od orbita koje zapocinju blizu ciklusa ocekujemo da se ne udaljavaju previseod ciklusa. I ovdje nas zanima samo ponasanje orbita nakon pocetnog trenutka.Precizno, stabilan ciklus definiramo na sljedeci nacin:
Definicija 7.1 Neka je Γ ciklus sustava x′ = f(x). Kazemo da je Γ stabilan ako zasvaki ε > 0 postoji δ > 0, takav da ako je d(x0,Γ) < δ, onda je d(φ(t, x0),Γ) < ε,za svaki t > 0.
Ciklus je nestabilan ako nije stabilan. Analogno se definira i asimptoticka stabilnostciklusa:
Definicija 7.2 Ciklus Γ je asimptoticki stabilan ako je stabilan te ako postoji a > 0takav da za d(x0,Γ) < a vrijedi limt→+∞ d(φ(t, x0),Γ) = 0.
Primjer 7.1 Neka je zadan sustav{x′ = −y + x(
√x2 + y2 − 1)(
√x2 + y2 − 2)
y′ = x+ y(√x2 + y2 − 1)(
√x2 + y2 − 2)
.
U polarnim koordinatama taj sustav glasi
r′ = r(r − 1)(r − 2) , ϕ′ = 1 .
Dakle, imamo r′ > 0 za 0 < r < 1 i r > 2. Sustav ima dva ciklusa r = 1 i r = 2.Ostale orbite se spiralno krecu prema r = 1 ili se udaljavaju od r = 2. Prema tome,r = 1 je stabilan ciklus, dok je r = 2 nestabilan.
77

Pogledajmo sada cikluse planarnog sustava.
Definicija 7.3 Granicni ciklus Γ planarnog sustava je ciklus koji je α ili ω-granicniciklus neke orbite razlicite od Γ. U prvom slucaju zovemo ga α-granicni ciklus ilinestabilan granicni ciklus, dok ga u drugom slucaju zovemo ω-granicni ili stabilangranicni ciklus.
Iako je za ω-granicni ciklus dovoljno da je ω-granicni skup barem jedne orbite, tosvojstvo vrijedi za svaku orbitu iz njegove okoline. Naime, vrijedi sljedeci rezultat.
Teorem 7.1 Neka je zadan sustav x′ = f(x), gdje je f ∈ C1(E)2. Ako postoji nekaorbita koja zapocinje u unutrasnjosti ciklusa Γ i kojoj je Γ ω-granicni skup, tadapostoji okolina U od Γ takva da svaka orbita koja pocinje u U i u unutrasnjosti odΓ ima svojstvo da joj je Γ ω-granicni skup.
Napomenimo da se isti rezultat moze izvesti i ako u prethodnom teoremu zamije-nimo unutrasnjost ciklusa Γ s njegovim vanjskim dijelom, kao i ω-granicni skup sα-granicnim skupom.
Definicija 7.4 Ako je ciklus Γ i α-granicni skup neke orbite iz svoje okoline i ω-granicni skup neke druge orbite iz okoline, onda kazemo da je ciklus polustabilangranicni ciklus.
Primjer 7.2 Zadan je sustav{x′ = −y + x(1− x2 − y2)2y′ = x+ y(1− x2 − y2)2 .
U polarnim koordinatama on glasi
r′ = r(1− r2)2 , ϕ′ = 1 .
Dakle, za r 6= 1 imamo r′ > 0. Prema tome, orbite unutar kruznice r = 1, koja jeciklus sustava, spiralno se priblizavaju ciklusu, a one izvan te kruznice spiralno seudaljavaju od nje. Za prvi tip orbita r = 1 je ω-granicni skup, dok je za drugi tiporbita α-granicni skup. Zakljucujemo da je r = 1 polustabilni granicni ciklus.
78

7.2 Poincareovo preslikavanje
Neka je zadan ciklus Γ ⊆ Rn te neka je x0 neka tocka ciklusa. Postavimo kroz x0hiperravninu Σ okomitu na Γ. Neka je Γ slika rjesenja γ = γ(t) za koje je γ(0) = x0.Tangencijalni vektor na Γ u x0 je vektor γ′(0) = f(γ(0)) = f(x0). Hiperravnina Σje dakle definirana s
Σ = {x ∈ Rn : (x− x0) · f(x0) = 0} .
Teorem 7.2 Neka je E ⊆ Rn i f ∈ C1(E)n. Neka je Γ ciklus koji je slika rjesenjaφ(·, x0) perioda T . Oznacimo sa Σ hiperravninu kroz x0 okomitu na Γ. Tada postojiδ > 0 i jedinstvena funkcija τ = τ(x) definirana na B(x0, δ) takva da je τ(x0) = Ti φτ(x)(x) ∈ Σ, za svaki x ∈ B(x0, δ).
Dokaz. Definiramo funkciju F : R× E → R s F (t, x) = (φ(t, x)− x0) · f(x0). Kakoje svako rjesenje φ(·, x) funkcija klase C1, te imamo neprekidnu diferencijabilnostrjesenja po pocetnom uvjetu, zakljucujemo da je F klase C1.
Nadalje, primijetimo da je F (T, x0) = 0, zbog periodicnosti rjesenja φ(·, x0). Takoderje
∂F
∂t(T, x0) =
∂φ
∂t(T, x0) · f(x0) = f(φ(T, x0)) · f(x0) = ||f(x0)||2 .
Kako tocka x0 pripada ciklusu, nije kriticna tocka te je ∂F∂t
(T, x0) 6= 0. Prema tome,zadovoljeni su uvjeti Teorema o implicitnoj funkciji te postoji δ > 0 i jedinstvenafunkcija τ : B(x0, δ)→ I, gdje je I ⊂ R interval oko T , takva da je F (τ(x), x) = 0,za svaki x ∈ B(x0, δ). Konkretno, to znaci da je za x ∈ B(x0, δ)
(φ(τ(x), x)− x0) · f(x0) = 0
te je zbog toga φτ(x)(x) ∈ Σ. �
Koristeci preslikavanje τ iz prethodnog teorema, definiramo Poincareovo preslikava-nje na hiperravnini Σ.
Definicija 7.5 Poincareovo preslikavanje je preslikavanje P : B(x0, δ) ∩ Σ → Σdefinirano s
P (x) = φτ(x)(x) .
Iz svojstva funkcije τ mozemo zakljuciti da je funkcija P klase C1.
Primjer 7.3 Odredit cemo Poincareovo preslikavanje za sustav{x′ = −y + x(1− x2 − y2)y′ = x+ y(1− x2 − y2) .
U polarnim koordinatama sustav glasi r′ = r(1 − r2), ϕ′ = 1. Stoga je r = 1 ciklussustava. Hiperravnina u odnosu na koju cemo odrediti Poincareovo preslikavanje
79

neka je pravac okomit na kruznicu r = 1 koji cini kut ϕ0 s x-osi.
Jednadzbu za r zapisimo u obliku r′ = r − r3. Radi se o Bernoulllijevoj jednadzbi.Rjesavamo je supstitucijom z = r−2. Iz jednadzbe imamo prvo r−3r′ = r−2 − 1 pasupstitucijom dobivamo z′ = −2(z − 1). Rjesenje trazimo u obliku z(t) = C(t)e−2t.Uvrstavanjem u jednadzbu dobivamo C(t) = e2t + C, odnosno z(t) = 1 + Ce−2t.
Konacno, r(t) = (1 + Ce−2t)−12 . Orbita pocinje u tocki (r0, ϕ0) te je C = r−20 − 1,
odnosnor(t) = [1 + (r−20 − 1)e−2t]−
12 .
Orbita koju promatramo se zbog ϕ(t) = t+ϕ0 spiralno namata oko kruznice. Sljedecikut koji odgovara tockama na izabranoj hiperravnini je ϕ0 + 2π koji se postize zat = 2π. U tom trenutku je radijus pripadne tocke orbite jednak
r(t) = [1 + (r−20 − 1)e−4π]−12 .
Ta tocka je upravo slika Poincareovog preslikavanja. Vidimo da radijus tocke neovisi o izboru hiperravnine. Tocka je u potpunosti odredena radijusom pa trazenopreslikavanje mozemo zapisati kao P : R+ → R+, gdje je
P (r) = [1 + (r−2 − 1)e−4π]−12 .
Pretpostavimo sada bez smanjenja opcenitosti da je zadan ciklus Γ planarnog sus-tava koji prolazi ishodistem. Promatramo hiperravninu Σ, koja je pravac okomitna Γ u ishodistu. Neka je P = P (ρ) Poincareovo preslikavanje na tom pravcu, gdjeje |ρ| udaljenost promatrane tocke na pravcu Σ od ishodista (pri cemu je ρ > 0 zatocke pravca izvan ciklusa i ρ < 0 za tocke unutar ciklusa). Pretpostavimo da jeP ′(0) < 1. Neka je d(ρ) = P (ρ) − ρ. Tada je d(0) = 0. Prema Teoremu srednjevrijednosti za svaki ρ postoji ξρ ∈ I(0, ρ) takav da je d(ρ)− d(0) = d′(ξρ)ρ. Kako jed′(0) < 0, a funkcija d je klase C1, za dovoljno malen interval J oko nule i ξ ∈ J jed′(ξ) < 0. Neka je dakle ρ ∈ J . Za ρ > 0 je d(ρ) < 0, a za ρ < 0 je d(ρ) > 0. Drugimrijecima, za tocke pravca Σ, blizu ishodista, slika Poincareovog preslikavanja je blizaciklusu od pocetne tocke.Analogno, za P ′(0) > 1, Poincareovim preslikavanjem se udaljavamo od ciklusa.
Za funkciju f = (f1, f2) mozemo vrijednost P ′(0) izracunati i pomocu formule
P ′(0) = exp
(∫ t
0
divf(γ(t))dt
),
gdje je divf = ∂f1∂x1
+ ∂f2∂x2
.
U primjeru 7.3 imamo
divf =∂
∂x(−y + x(1− x2 − y2)) +
∂
∂y(x+ y(1− x2 − y2))
80

= (1− x2 − y2)− 2x2 + (1− x2 − y2)− 2y2 = 2− 4(x2 + y2) .
Ciklus r = 1 mozemo parametrizirati s γ(t) = (cos(t+ϕ0), sin(t+ϕ0)). Prema tomeimamo
P ′(0) = exp
(∫ 2π
0
(2− 4(cos2(t+ ϕ0) + sin2(t+ ϕ0)))dt
)= e−4π < 1 .
7.3 Stabilna i nestabilna mnogostrukost ciklusa
Kao i kod kriticnih tocaka, i u okolini ciklusa moguce je ponekad naci skup koji sadrziciklus, invarijantan je na tok, te se sve orbite koje u njemu zapocinju priblizavajuciklusu kad t → +∞. Takav skup zovemo globalna stabilna mnogostrukost ciklusai oznacavamo ga s W s(Γ).Ukoliko skup ima ista svojstva kao i prethodni, ali se priblizavanje orbita zbiva kadt→ −∞, tada je taj skup globalna nestabilna mnogostrukost.
Egzistenciju oba skupa mozemo utvrditi pomocu linearizacije sustava oko danogciklusa. Ako je ciklus parametriziran funkcijom γ = γ(t), linearizirani sustav jex′ = Df(γ(t))x′, koji je linearan i homogen, ali nema konstantnu matricu. Kako jerjesenje γ periodicko, dobiveni sustav je Floquetov.
Primjer 7.4 Pogledajmo sustavx′ = −y + x(1− x2 − y2)y′ = x+ y(1− x2 − y2)z′ = z
.
Prve dvije jednadzbe mozemo zapisati u polarnim koordinatama kao r′ = r(1− r2),ϕ′ = 1. Iz trece jednadzbe dobivamo z(t) = z0e
t. Jedina kriticna tocka sustava jeishodiste. Za z0 = 0 imamo orbite koje pripadaju xy-ravnini. Dakle, ta ravnina jeinvarijantna na tok sustava. U njoj imamo jedan ciklus r = 1. Ostale orbite u tojravnini se ponasaju spiralno. Unutar ciklusa je r′ > 0, a izvan r′ < 0. Prema tome,orbite se krecu prema ciklusu.Izvan xy-ravnine imamo orbite koje pripadaju cilindru r = 1. Ako orbita pocinjena tom cilindru iznad xy-ravnine, i dalje ce se gibati po cilindru i udaljavati odxy-ravnine. Takoder, i z-os je invarijantna na tok. Ostale orbite koje pocinju iznadxy-ravnine spiralno se namataju prema cilindru i udaljavaju se od xy-osi. Analognoponasanje orbita imamo i ispod xy-ravnine, gdje se orbite takoder udaljavaju od teravnine.
Konacno zakljucujemo da je skup {(x, y, 0) : (x, y) 6= (0, 0)} invarijantan na tok tese sve orbite koje pocinju u tom skupu priblizavaju ciklusu sustava kad t → +∞.
81

Dakle, taj skup je globalna stabilna mnogostrukost danog sustava. S druge strane, je-dinicni cilindar r = 1 je takoder invarijantan na tok, a orbite s pocetnim tockama natom cilindru priblizavaju se ciklusu kad t → −∞. Prema tome, cilndar je globalnanestabilna mnogostrukost.
Kriterij za utvrdivanje stabilne i nestabilne mnogostrukosti oko kriticne tocke te-meljio se na svojstvenim vrijednostima matrice lineariziranog sustava, preciznije nanjihovim realnim dijelovima. Analogno se izvodi kriterij za utvrdivanje istih mno-gostrukosti oko ciklusa sustava. Medutim, pritom koristimo tzv. karakteristicneeksponente. Da bismo ih definirali, prisjetimo se da je matrica lineariziranog sus-tava oko ciklusa Γ parametriziranog s γ = γ(t) dana s Df(γ) = Df(γ(t)). Radi seo periodickoj matricnoj funkciji te je pripadni sustav Floquetov. Neka je Φ = Φ(t)neka njegova fundamentalna matrica. Tada postoji matrica B ∈Mn(C) i periodickamatricna funkcija P : R → Mn(R) takva da vrijedi Φ(t) = P (t)eBt, t ∈ R. Svoj-stvene vrijednosti λi, i = 1, . . . , n matrice B su karakteristicni eksponenti od γ. Akoje T period od γ, onda su vrijednosti eλiT , i = 1, . . . , n karakteristicni multiplikatori.Sada mozemo iskazati teorem o stabilnoj mnogostrukosti za cikluse.
Teorem 7.3 Neka je f ∈ C1(E)n, gdje je E ⊆ Rn otvoren skup koji sadrzi ciklus Γsustava x′ = f(x). Ciklus je parametriziran funkcijom γ perioda T . Ako k karakte-risticnih eksponenata od γ ima negativne realne dijelove, a n−k−1 karakteristicniheksponenata ima pozitivne realne dijelove, onda ciklus Γ ima (k+ 1)-dimenzionalnuglobalnu stabilnu mnogostrukost i (n − k)-dimenzionalnu globalnu nestabilnu mno-gostrukost klase C1.
Primjer 7.5 U primjeru 7.4 imali smo ciklus r = 1 kojeg mozemo parametriziratis (cos t, sin t). Kako je
Df(x, y) =
1− 3x2 − y2 −1− 2xy 01− 2xy 1− x2 − 3y2 0
0 0 1
,
matrica lineariziranog sustava oko ciklusa glasi
Df(γ(t)) =
−2 cos2 t −1− 2 cos t · sin t 01− 2 sin t · cos t −2 sin2 t 0
0 0 1
.
Jedna fundamentalna matrica sustava je
Φ(t) =
cos t e−2t cos t 0− sin t e−2t sin t 0
0 0 et
.
82

Nju mozemo zapisati kao Φ(t) = P (t)eBt, gdje je
P (t) =
cos t cos t 0− sin t sin t 0
0 0 1
, eBt =
1 0 00 e−2t 00 0 et
,
odnosno
B =
0 0 00 −2 00 0 1
.
Kako su karakteristicni eksponenti od γ jednaki 0, 1, -2, prema teoremu 7.3 za-kljucujemo da imamo i dvodimenzionalnu stabilnu i dvodimenzionalnu nestabilnumnogostrukost oko ciklusa sustava (zbog k = 1), sto smo prethodno zakljucili i pro-matrajuci fazni dijagram sustava.
7.4 Egzistencija ciklusa
Ponekad nije jednostavno precizno odrediti cikluse sustava. Medutim, u nekima odtih situacija moze se ipak dokazati da sustav ima ciklus te se moze odrediti nekimanji skup unutar kojeg se on nalazi. Navodimo sljedeci rezultat.
Teorem 7.4 (Poincare-Bendixson) Neka je dan sustav x′ = f(x), gdje je f ∈C1(E)n. Neka je Γ orbita sustava i neka postoji x0 ∈ Γ takva da je desna poluorbitas obzirom na x0 sadrzana u kompaktnom skupu K. Ako ω(Γ) ne sadrzi nijednukriticnu tocku sustava, tada je ω(Γ) ciklus.
Do istog zakljucka dolazimo i ako je lijeva poluorbita sadrzana u kompaktnom skupui α(Γ) ne sadrzi kriticnu tocku. Tada promatramo sustav x′ = −f(x). Sustavi imajujednak skup kriticnih tocaka. Primijetimo da ako je x = x(t) rjesenje zadanog sus-tava, tada je funkcija x(t) = x(−t) rjesenje drugog sustava. Orbita Γ zadanogsustava cija je lijeva poluorbita u skupu K je stoga i orbita drugog sustava cija jedesna poluorbita u K. Njen ω-granicni skup je jednak α-granicnom skupu iste or-bite gledano iz perspektive zadanog sustava. Primijenimo li Poincare-Bendixsonovteorem na sustav x′ = −f(x), vidimo da je ω(Γ) ciklus tog sustava, pa je α(Γ) ciklusza zadani sustav.
Primjer 7.6 Promatramo sustav{x′ = −y + x(r2 − 4r + 3.75)y′ = x+ y(r2 − 4r + 3.75)
.
83

Slika 7.1.
Sustav se u polarnim koordinatama zapisuje kao r′(r) = r(r2 − 4r + 3.75), ϕ′ = 1.Sada uzmimo vijenac
V1 = {(x, y) ∈ R2 : 1 ≤ r ≤ 2} .
Kako je r′(1) = 0.75, a r′(2) = −0.5, zakljucujemo da orbita koja pocinje u V1 nemoze napustiti V1. Na slici 7.1 vidimo dopusteno kretanje orbite na granicama odV1. Ishodiste je jedina kriticna tocka sustava te ne pripada V1. Kako je ω(Γ) ⊂ V1,zakljucujemo da (0, 0) ne pripada ω(Γ). Sada primjenom Poincare-Bendixsonovogteorema zakljucujemo da sustav ima ciklus ω(Γ) za kojeg znamo da pripada V1.
Slicno, uzmimoV2 = {(x, y) ∈ R2 : 2 ≤ r ≤ 3} .
Sada primijetimo da je r′(2) = −0.5, r′(3) = 2.25. Prema tome, orbiti koja pocinjeu V2 lijeva poluorbita nije mogla uci iz podrucja izvan vijenca V2 (slika 7.2), odnosnolijeva poluorbita u potpunosti pripada V2. Kao i prije zakljucujemo da (0, 0) ne pri-pada α(Γ) pa prema napomeni iza teorema 7.4 zakljucujemo da je α(Γ) ciklus zaovaj sustav.
U ovom primjeru je naravno lako naci cikluse odmah iz jednadzbe sustava. Iz r′ = 0dobivamo da su to kruznice radijusa 1.5 i 2.5 sto odgovara zakljuccima koje smo izveliprimjenjujuci Poincare-Bendixsonov teorem. Primijetimo takoder da kako god oda-beremo pocetnu tocku orbite unutar V1, uvijek cemo dobiti isti ciklus. Isti zakljucakvrijedi i za pocetne tocke orbita unutar V2.
84

Slika 7.2.
Primjer 7.7 Sada cemo dokazati egzistenciju ciklusa za sustav{x′ = x− y − x3y′ = x+ y − y3 .
Skiciramo krivulje y = x−x3 i x = y3− y (slika 7.3) te zakljucujemo da je ishodistejedina kriticna tocka sustava. Prijelazom na polarne koordinate dobivamo jednadzbu
r′ =x2 + y2 − x4 − y4
r=r2 − r4 + 2x2y2
r= r − r3 +
1
2r3 sin2(2ϕ) .
Primijetimo da je
r − r3 ≤ r′ ≤ r − 1
2r3 .
Sada je r′(2) ≤ 2 − 12· 8 = −2 < 0. S druge strane je r′
(12
)≥ 1
2−(12
)3= 3
8> 0.
Kao i u prethodnom zadatku, zakljucujemo da desna poluorbita orbite Γ koja pocinjeu vijencu V , gdje je V definiran s
V =
{(x, y) ∈ R2 :
1
2≤ r ≤ 2
},
ne moze izaci iz skupa V . Skup V ne sadrzi nijednu kriticnu tocku sustava, pa june sadrzi ni ω(Γ). Primjenom teorema 7.4 opet dolazimo do zakljucka da je ω(Γ)ciklus sustava.
85
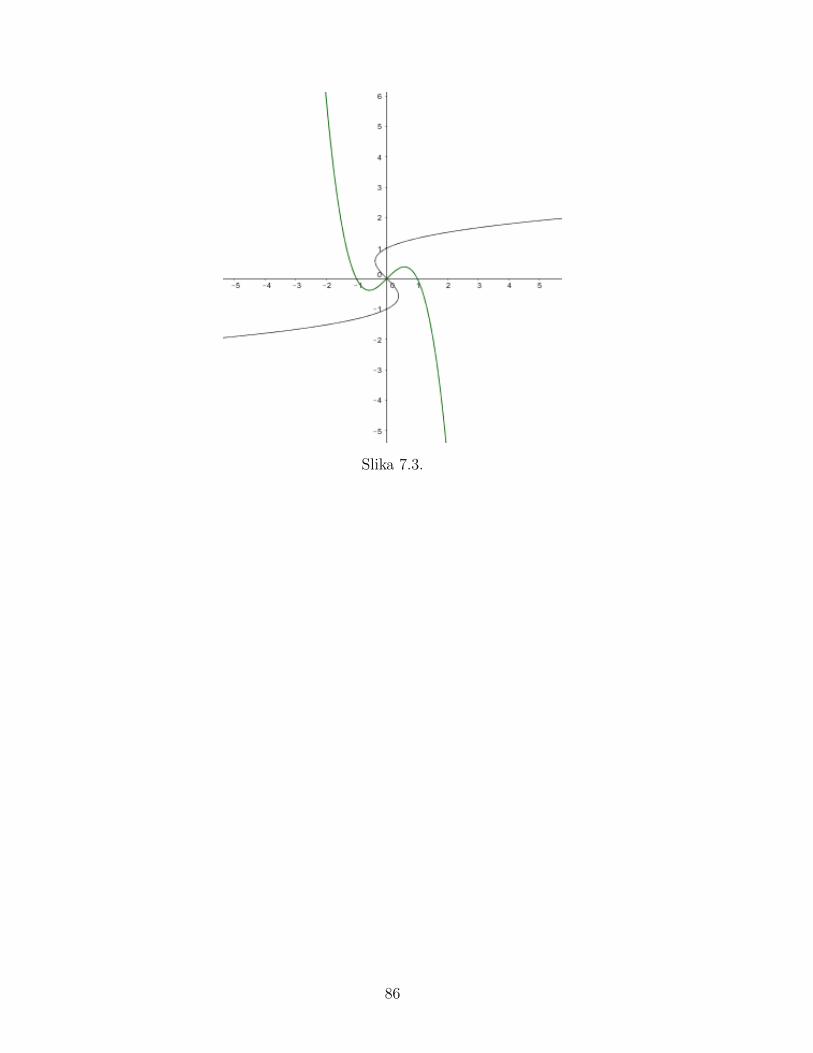
Slika 7.3.
86
Literatura
[1] H. Amann, Ordinary differential equations, de Gruyter, 1990.
[2] V. Arnold, Equations differentielles ordinaires, MIR, 1988.
[3] M. Braun, Differential equations and their applications, Springer Verlag, 1993.
[4] M. W. Hirsch, S. Smale, Differential equations, dynamical systems, and linearalgebra, Academic Press, 1974.
[5] W. G. Kelley, A.C. Peterson, The theory of differential equations, Springer,2010.
[6] V. V. Nemytskii, V. V. Stepanov, Qualitative theory of differential equations,Dover Publ, 1989.
[7] L. C. Piccinini, G. Stampacchia, G. Vidossich, Ordinary differential equationsin Rn, Springer Verlag, 1984.
87





























