Upload
dan-wolf
View
3.937
Download
16
Embed Size (px)
DESCRIPTION
This demonstration problems manual, written for those with a working knowledge of Nastran, highlights the steps necessary to use the advanced features of MD V2010 Nastran, including contact, elastic-plastic creep, elastomeric material nonlinearities, heat transfer, and adaptive mesh refinement. The subsequent application examples focus on how to include these advanced features by making relatively modest changes to existing MD Nastran bulk data files (bdf) using either a text editor or a preprocessing program like Patran.
Citation preview
MD NastranMD Demonstration Problems
CorporateMSC.Software Corporation 2 MacArthur Place Santa Ana, CA 92707 Telephone: (800) 345-2078 FAX: (714) 784-4056
EuropeMSC.Software GmbH Am Moosfeld 13 81829 Munich GERMANY Telephone: (49) (89) 43 19 87 0 Fax: (49) (89) 43 61 71 6
Asia PacificMSC.Software Japan Ltd. Shinjuku First West 8F 23-7 Nishi Shinjuku 1-Chome, Shinjuku-Ku Tokyo 160-0023, JAPAN Telephone: (81) (3)-6911-1200 Fax: (81) (3)-6911-1201
Worldwide Webwww.mscsoftware.comUser Documentation: Copyright 2010 MSC.Software Corporation. Printed in U.S.A. All Rights Reserved. This document, and the software described in it, are furnished under license and may be used or copied only in accordance with the terms of such license. Any reproduction or distribution of this document, in whole or in part, without the prior written authorization of MSC.Software Corporation is strictly prohibited. MSC.Software Corporation reserves the right to make changes in specifications and other information contained in this document without prior notice. The concepts, methods, and examples presented in this document are for illustrative and educational purposes only and are not intended to be exhaustive or to apply to any particular engineering problem or design. THIS DOCUMENT IS PROVIDED ON AN AS-IS BASIS AND ALL EXPRESS AND IMPLIED CONDITIONS, REPRESENTATIONS AND WARRANTIES, INCLUDING ANY IMPLIED WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE, ARE DISCLAIMED, EXCEPT TO THE EXTENT THAT SUCH DISCLAIMERS ARE HELD TO BE LEGALLY INVALID. MSC.Software logo, MSC, MSC., MSC/, MD Nastran, ADAMS, Dytran, MARC, Mentat, and Patran are trademarks or registered trademarks of MSC.Software Corporation or its subsidiaries in the United States and/or other countries. NASTRAN is a registered trademark of NASA. MSC.Nastran is an enhanced proprietary version developed and maintained by MSC.Software Corporation. Python is a trademark of the Python Software Foundation. LS-DYNA is a trademark of Livermore Software Technology Corporation. All other trademarks are the property of their respective owners. This software may contain certain third-party software that is protected by copyright and licensed from MSC.Software suppliers. METIS is copyrighted by the regents of the University of Minnesota. NT-MPICH is developed by Lehrstuhl fr Betriebssysteme der RWTH Aachen. Copyright 1992-2004 Lehrstuhl fr Betriebssysteme der RWTH Aachen. PCGLSS 6.0 is licensed from Computational Applications and System Integration Inc. Use, duplication, or disclosure by the U.S. Government is subject to restrictions as set forth in FAR 12.212 (Commercial Computer Software) and DFARS 227.7202 (Commercial Computer Software and Commercial Computer Software Documentation), as applicable. Revision 0 07/04/2010 MDNA*V2010*Z*Z:Z*MN-DPM
ContentsMD Demonstration Problems
Contents
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 2 3 4 5 6 7 8 9 10 11 2-D Cylindrical Roller Contact. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-D Punch (Rounded Edges) Contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-D Sheet Metal Forming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-D Loaded Pin with Friction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 18 69 79 94
Bilinear Friction Model: Sliding Wedge . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102 Laminated Strip under Three-point Bending . . . . . . . . . . . . . . . . . . . . . . . . 109 Wrapped Thick Cylinder under Pressure and Thermal Loading . . . . . . . . 115 Three-layer Sandwich Shell under Normal Pressure Loading. . . . . . . . . . 120 Bird Strike on Prestressed Rotating Fan Blades . . . . . . . . . . . . . . . . . . . . 126 Engine Gasket . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135 Elastic-plastic Collapse of a Cylindrical Pipe under External Rigid Body Loading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145 Thermal/Pressure Loaded Cylinders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
12
4 MD Demonstration Problems
13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
Ball Joint Rubber Boot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220 Time NVH Analysis Chassis Example . . . . . . . . . . . . . . . . . . . . . . . . . . . Tube Flaring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Cup Forming Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Double-sided Contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Demonstration of Springback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-D Indentation and Rolling without Friction . . . . . . . . . . . . . . . . . . . . . . . Composite Fracture and Delamination . . . . . . . . . . . . . . . . . . . . . . . . . . . . Occupant Safety and Airbag Deployment . . . . . . . . . . . . . . . . . . . . . . . . . . Multi-compartment Side Curtain Airbag Deployment . . . . . . . . . . . . . . . . Bolted Plates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Friction Between Belt and Pulley . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230 239 246 256 305 312 365 374 419 425 438
Modal Analysis with Glued Contact. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 447 Interference Fit Contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Large Sliding Contact Analysis of a Buckle . . . . . . . . . . . . . . . . . . . . . . . . Model Airplane Engine Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455 462 474
Contents 5
29
Rapid Road Response Optimization of a Camaro Model using Automatic External Superelement Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486 Paper Feeding Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497 Wheel Drop Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504 Pick-up Truck Frontal Crash . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511 Beams: Composite Materials and Open Cross Sections . . . . . . . . . . . . . . 516 Topology Optimization MBB Beam and Torsion . . . . . . . . . . . . . . . . . . . . . 526 Engine Mount Topology Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541 Wheel Topology Optimization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 548 Local Adaptive Meshing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553 Landing Gear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565 Brake Squeal Analysis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 579 Multiple Bird-strikes on Box Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 589 Shaped Charge Penetrating Two Plates . . . . . . . . . . . . . . . . . . . . . . . . . . . 656 Mine Blast Under a Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715 Blastwave Hitting a Bunker. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735 Concentric Spheres with Radiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798
30 31 32 33 34 35 36 37 38 39 40 41 42 43 44
6 MD Demonstration Problems
45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
Transient Thermal Analysis of Power Electronics . . . . . . . . . . . . . . . . . . . Thermal Stress Analysis of an Integrated Circuit Board . . . . . . . . . . . . . . Dynamic Impact of a Rigid Sphere on a Woven Fabric . . . . . . . . . . . . . . . Shape Memory Analysis of a Stent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Shell Edge Contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
855 920 971 984 993
Large Rotation Analysis of a Riveted Lap Joint . . . . . . . . . . . . . . . . . . . . . 1037 Creep of a Tube . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1050 Hydro-forming of a Square Pan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1058 Chained Analysis: Fan Blade Out with Rotor Dynamics . . . . . . . . . . . . . . 1067 Ball Penetration using SPH Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1088 Square Cup Deep Drawing using Forming Limit Diagram. . . . . . . . . . . . . 1097 Hydroplaning Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1113 Heating and Convection on a Plate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1131 Coupled Advection for Heat Exchanger . . . . . . . . . . . . . . . . . . . . . . . . . . . 1143 Shallow Cylindrical Shell Snap-through . . . . . . . . . . . . . . . . . . . . . . . . . . . 1154 Deformable Baffle in a Duct using OpenFSI . . . . . . . . . . . . . . . . . . . . . . . . 1163
Contents 7
61
Steady State Heat Transfer due to Natural Convection between Two Noncontacting Bodies located in Nearby Vicinity . . . . . . . . . . . . . . . . . . . 1167 Girkmann Problem using Axisymmetric Shell Elements . . . . . . . . . . . . . . 1177 Beam Reinforced Shell Structure using Offsets . . . . . . . . . . . . . . . . . . . . . 1186 Stent Analysis with Growing Rigid Body. . . . . . . . . . . . . . . . . . . . . . . . . . . 1198 Convection Correlations for Printed Circuit Board (PCB) . . . . . . . . . . . . . 1208 Satellite in Orbit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1220 Thermal Contact on Surface, Edge and Solid Face . . . . . . . . . . . . . . . . . . 1234 Collection and Primitives Radiation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1241 Simulation of Fuel Tank Filling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1253 User-defined Subroutines for Heat Transfer Coefficient . . . . . . . . . . . . . . 1269 Impact of a Rigid on Composite Laminate using GENOA PFA Material . . 1282 Automated Bolt Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1289 Cylinder Upsetting with Plastic and Friction Heat Generation . . . . . . . . . 1301 Getting Started in SimXpert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1311
62 63 64 65 66 67 68 69 70 71 72 73 A
Preface
Preface
Introduction
9 10
Feature Cross Reference Overview of SimXpert List of Nastran Books Technical Support Internet Resources 15 17 13 14
MD Demonstration Problems 9 Preface
IntroductionThis demonstration problems manual, written for those with a working knowledge of Nastran, highlights the steps necessary to use the advanced features of MD V2010 Nastran, including contact, elastic-plastic creep, elastomeric material nonlinearities, heat transfer, and adaptive mesh refinement. The subsequent application examples focus on how to include these advanced features by making relatively modest changes to existing MD Nastran bulk data files using either a text editor or using a pre- and post-processing program like SimXpert exemplified in the video showcase below. Click the thumbnails (Figure P-1) to open streaming videos, or read on and youll find these videos at the end of the indicated chapters.
39
56 6
2
16 72
25 5
23 3
6 60 44 28
6410 A 10
45
61
18 18
46
core
49 42 42 53
8
71 227
4t FL25 23
y z
200 x z=0
Figure P-1
MD Nastran Another World - Click Thumbnails for Streaming How To Videos
2
F
10
Every application example has a working input file(s) available to simulate the results found in each chapter, and upon clicking its name, it will be downloaded into your browser to use. Once an understanding of how to invoke a new feature has been reached, you are encouraged to experiment by changing some of the input parameters and rerunning the application. Furthermore, as confidence grows, these models can serve as stepping stones to more complex simulations that can help you better understand and improve your simulations.
Feature Cross ReferenceThe basic features in Table P-1 are cross referenced to each chapter for your convenience. Click the chapter number in the table to go to the summary of that chapter. Table P-1 Ch. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sol 400 400 400 400 400 400 400 400 700 400 400 400 400 103 & 700 400 Cross Reference of Solution Sequence, Element Types, Materials, Loads/BC, Contact, and Load Control Element Type(s) plane strain axisymmetric & 3-D Material Isotropic Elastic Isotropic Elastic Loads/BC Point Load Pressure Moving Rigid Body Point Load Gravity, Pressure Point Load Pressure Pressure Centripetal, Impact Pressure, Bolt Loading Pressure Contact yes yes yes yes yes no no no yes yes yes no yes Point Load no yes Load ControlNLPARM NLPARM NLPARM NLPARM NLPARM NLPARM NLPARM NLPARM TSTEPNL NLPARM NLPARM NLPARM NLSTEP TSTEPNL NLPARM
plane strain and 3-D Elastic-plastic shell 3-D 3-D 2-D & 3-D 3-D shell 3-D shell 3-D shell and solid 3-D 3-D shell 3-D axisymmetric 3-D shell axisymmetric Isotropic Elastic Isotropic Elastic Composite - Orthotropic Elastic Composite - Orthotropic Elastic Composite - Orthotropic Elastic Metal Isotropic Elastic gasket Elastic-plastic Isotropic Elastic Mooney, Ogden Isotropic Elastic Elastic-plastic
MD Demonstration Problems 11 Preface
Table P-1 Ch. 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 Sol 400 400 400 400 400 700 700 400 400 103 400 400 400 200 700 700 700 101 200 200 200 101 400
Cross Reference of Solution Sequence, Element Types, Materials, Loads/BC, Contact, and Load Control (continued) Element Type(s) 3-D shell plane strain plane strain 3-D plane strain 3-D 3-D 3-D 3-D 3-D 3-D 3-D 3-D 3-D 3-D 3-D 3-D Beam 2-D, & 3-D 3-D 3-D plane stress 3-D Material Elastic-plastic Elastic-plastic Elastic-plastic Elastic-plastic Isotropic Elastic cohesive Fabric, Seatbelt, Rigid, Fabric, Seatbelt, Rigid, Isotropic Elastic Isotropic Elastic Isotropic Elastic Isotropic Elastic Isotropic Elastic Isotropic Elastic/gasket Isotropic Elastic Isotropic Elastic Isotropic Elastic, Composite, Rubber, Elastic-Plastic Elastic-plastic, rigid Composites Isotropic Elastic Isotropic Elastic Isotropic Elastic Isotropic Elastic Isotropic Elastic Moving Rigid Body VCCT Airbag Side Airbag Bold Load, Pressure, Thermal Point Load Glued Contact Interference Fit Snap Fit Bolt Loads, Pressure Point Load Rollers Impact Impact Point Load Point Load Point Load Point Load Edge Load Distributed Load Loads/BC Moving Rigid Body Contact yes yes yes yes yes yes yes yes yes yes yes yes yes no yes yes yes no no no no no yesNLPARM TSTEPNL TSTEPNL TSTEPNL
Load ControlNLPARM NLPARM NLPARM NLPARM NLSTEP TSTEPNL TSTEPNL NLPARM NLPARM NLPARM NLPARM NLPARM NLSTEP
12
Table P-1 Ch. 39 40 41 42 43 44 45 46 47 48 Sol 400 700 700 700 700
Cross Reference of Solution Sequence, Element Types, Materials, Loads/BC, Contact, and Load Control (continued) Element Type(s) 3-D 3-D 3-D 3-D shell and truss 3-D 3-D membrane 3-D 3-D 3-D beams 3-D Material Isotropic and Anisotropic Elastic-plastic Elastic-plastic Elastic-plastic Elastic-plastic Isotropic Isotropic Isotropic Elastic-plastic Shape Memory Loads/BC Distributed Load Impact Explosion Explosion Explosion Radiation Thermal Loads Thermal Beam To Beam Prescribed Displacemen t Prescribed Displacemen t Point Load Pressure Pressure Blade Out Impact Moving Rigid Body Hydroplanin g Convection Convection Point Load OpenFSI yes no no yes yes yes yes FSI no no no no Contact yes FSI FSI FSI FSI no no no yes Load ControlNLPARM TSTEPNL TSTEPNL TSTEPNL TSTEPNL NLSTEP TSTEPNL, NLSTEP NLSTEP TSTEPNL
400-HT 400-HT 400-HT 400 400
NLPARM
49 50 51 52 53 54 55 56 57 58 59 60
400 400 400 400 700 700 700 700
3-D shells 3-D shell, CWELD, CFAST, CBUSH Axisymmetric 3-D 3-D 3-D shell 3-D shell 3-D solid & shell
Isotropic Elastic Isotropic Elastic Isotropic Elastic Creep Elastic-plastic Elastic-plastic Elastic-plastic, hydrodynamic Anisotropic Elastic-plastic, rigid Mooney Isotropic Isotropic Isotropic Isotropic
NLPARM
NLPARM NLSTEP NLSTEP TSTEPNL TSTEPNL TSTEPNL TSTEPNL NLSTEP NLSTEP NLSTEP TSTEPNL
400 2-D HT&RC 400-RC 400 400 3-D 3-D shell 3-D
MD Demonstration Problems 13 Preface
Table P-1 Ch. 61 62 63 64 65 66 67 Sol 400 400 400 400
Cross Reference of Solution Sequence, Element Types, Materials, Loads/BC, Contact, and Load Control (continued) Element Type(s) 3-D Axisymmetric 3-D shell and beam 3-D 3-D 3-D 3-D Isotropic Isotropic Elastic Elastic-plastic Elastic-plastic Isotropic Isotropic, Honeycomb Isotropic Material Loads/BC Convection Gravity, Pressure Pressure Moving Rigid Body Convection, Advection Radiation Prescribed Temperature s Radiation, Distributed Flux Convection Impact Bolt Load Moving Rigid Body Contact yes no no yes no no yesNLSTEP NLSTEP NLSTEP NLSTEP NLSTEP
Load ControlNLSTEP
400-RC 400-RC 400-RC
68 69 70 71 72 73
400-RC 700 400-RC 700 400 400
3-D 3-D 2-D 3-D shell 3-D Axisymmetric
Isotropic Isotropic Temp. dependent Orthotropic, Progressive Failure Isotropic Elastic Elastic-plastic
no FSI no yes yes yes
NLSTEP TSTEPNL NLSTEP TSTEPNL NLSTEP NLSTEP
Overview of SimXpertSimXpert is an integral component of the enterprise simulation environment. It incorporates direct integration with SimManager and SimDesigner. SimXpert is a multi-disciplinary simulation environment for the analyst including workspaces between which one common model can be shared. The workspaces provide different tools appropriate to the discipline: Structures linear and nonlinear, static and dynamic Finite Element Analysis (FEA) using MD Nastran Thermal linear FEA using MD Nastran Motion multi-body dynamics of rigid and flexible bodies using the Adams C++ solver Crash nonlinear explicit dynamic FEA using LS-Dyna MD Explicit - nonlinear explicit dynamic FEA using MD Nastran
14
Template Builder - Captures Simulation Procedures Consisting Of SimXpert Commands And Macros Process Builder - Creating Enterprise Processes (SimProcess) All solvers are included. Workspaces also filter the simulation model. Only the parts of the model that have relevance to a workspace are visible. The simulation process allows knowledge capture and re-use through the use of templates.The template builder allows you to: define a sequence of tasks and sub-tasks, drag-and-drop existing scripts in a visual editing environment, and publish the finished template to SimManager for re-use across an organization. To learn more about SimXpert, see Appendix A: Getting Started in SimXpert.
List of Nastran BooksBelow is a list of some of the Nastran documents. You may order any of these documents from the MSC.Software BooksMart site at http://store.mscsoftware.com. Installation and Release Guides
Installation and Operations Guide Release Guide Reference Books
Quick Reference Guide DMAP Programmers Guide Reference Manual
MD Demonstration Problems 15 Preface
Users Guides
Getting Started Linear Static Analysis Dynamic Analysis MD Demonstration Problems Thermal Analysis Superelement Design Sensitivity and Optimization Implicit Nonlinear (SOL 600) Explicit Nonlinear (SOL 700) Aeroelastic Analysis User Defined Services EFEA Users Guide EFEA Tutorial EBEA Users Guide
Technical SupportFor help with installing or using an MSC.Software product, contact your local technical support services. Our technical support provides the following services: Resolution of installation problems Advice on specific analysis capabilities Advice on modeling techniques Resolution of specific analysis problems (e.g., fatal messages) Verification of code error.
If you have concerns about an analysis, we suggest that you contact us at an early stage.
16
You can reach technical support services on the web, by telephone, or e-mail: Web Go to the MSC.Software website at www.mscsoftware.com, and click on Support. Here, you can find a wide variety of support resources including application examples, technical application notes, available training courses, and documentation updates at the MSC.Software Training, Technical Support, and Documentation web page. United States Telephone: (800) 732-7284 Fax: (714) Munich, Germany Phone: (49) (89) 43 19 87 0 Fax: (49) (89) 43 61 71 6 Rome, Italy Phone: (390) (6) 5 91 64 50 Fax: (390) (6) 5 91 25 05 Moscow, Russia Phone: (7) (095) 236 6177 Fax: (7) (095) 236 9762 Frimley, Camberley Surrey, United Kingdom Phone: (44) (1276) 60 19 00 Fax: (44) (1276) 69 11 11 Tokyo, Japan Phone: (81) (3) 3505 02 66 Fax: (81) (3) 3505 09 14 Paris, France Phone: (33) (1) 69 36 69 36 Fax: (33) (1) 69 36 45 17 Gouda, The Netherlands: Phone: (31) (18) 2543700 Fax: (31) (18) 2543707 Madrid, Spain Phone: (34) (91) 5560919 Fax: (34) (91) 5567280 E-mail Send a detailed description of the problem to the E-mail address below that corresponds to the product you are using. You should receive an acknowledgement that your message was received, followed by an E-mail from one of our Technical Support Engineers.MD Patran Support MD Nastran Support Dytran Support MSC Fatigue Support Marc Support MSC Institute Course Information [email protected] [email protected] [email protected] [email protected] [email protected] [email protected]
Phone and Fax
MD Demonstration Problems 17 Preface
Internet ResourcesMSC.Software (http://www.mscsoftware.com/) MSC.Software corporate site with information on the latest events, products and services for the CAD/CAE/CAM marketplace.
TrainingThe MSC Institute of Technology is the world's largest global supplier of CAD/CAM/CAE/PDM training products and services for the product design, analysis and manufacturing market. We offer over 100 courses through a global network of education centers. The Institute is uniquely positioned to optimize your investment in design and simulation software tools. Our industry experienced expert staff is available to customize our course offerings to meet your unique training requirements. For the most effective training, the Institute also offers many of our courses at our customer's facilities. MSC offers training at: 2 MacArthur Place Santa Ana, CA 92707 Phone: (800) 732-7211 Fax: (714) 784-4028 MSC maintains state-of-the-art classroom facilities at training centers throughout the world. All of our courses emphasize hands-on computer laboratory work to facilitate skills development. We specialize in customized training based on our evaluation of your design and simulation processes, which yields courses that are geared to your business. In addition to traditional instructor-led classes, we also offer video and DVD courses, interactive multimedia training, web-based training, and a specialized instructor's program.
Course Information and RegistrationFor detailed course descriptions, schedule information, and registration, call the Training Specialist at (800) 732-7211 or visit http://www.mscsoftware.com/.
Engineering-e.com (http://store.mscsoftware.com/)Engineering-e.com is the first virtual marketplace where clients can find engineering expertise plus the goods and services they need to successfully complete their projects.
Chapter 1: 2-D Cylindrical Roller Contact
1
2-D Cylindrical Roller Contact
Summary Introduction
19 20 20
Solution Requirements Analytical Solution FEM Solutions Modeling Tips 21 25 20
Pre- and Postprocess with SimXpert Input File(s) 68
28
CHAPTER 1 19 2-D Cylindrical Roller Contact
SummaryTitle Contact features Chapter 1: 2-D Cylindrical Roller Contact Advancing contact area Curved contact surfaces Deformable-deformable contact Friction Comparison of linear and parabolic elementsF
Geometry
2-D Plane strain (units: mm) Block height = 200 Block width = 200 Cylinder diameter =100 Thickness = 1E block = 70kN mm 2
Material properties Analysis type Boundary conditions
E cylinder = 210kN mm 2
cylinder = block = 0.3
Linear elastic material Quasi-static analysis Symmetric displacement constraints along vertical symmetry line. Bottom surface of the foundation is fixed u x = u y = 0 Contact between cylinder and block Vertical point load F = 35kN 2-D Plane strain 8 -node parabolic elements 4-node linear elements Coefficient of friction = 0.0
Applied loads Element type
Contact properties FE results
and
= 0.1
1. Plot of normal contact pressure against distance from center of contact 2. Plot of tangential stress against distance from center of contact 3. Plot of relative tangential slip against distance from center of contact5000 4000 3000 2000 1000 0 0 1 2 3 4 5 6 7 8Contact Pressure N/mm 2Analytical SOL 400 Contacting Surface SOL 400 Contacted Surface
Distance (mm)
20 MD Demonstration ProblemsCHAPTER 1
IntroductionA steel cylinder is pressed into an aluminum block. It is assumed that the material behavior for both materials is linear elastic. The cylinder is loaded by a point load with magnitude F = 35kN in the vertical direction. A 2-D approximation (plane strain) of this problem is assumed to be representative for the solution. An analytical solution for the frictionless case is known - (Ref: NAFEMS, 2006, Advanced Finite Element Contact Benchmarks, Benchmark 1 2D Cylinder Roller Contact).
Solution RequirementsThere are two solutions: one using a friction coefficient of 0.1 between the cylinder and block and one frictionless. Length of contact zone Normal pressure distribution as function of distance (x-coordinate) along the contact surface Tangential stress distribution as function of distance along the contact surface These solutions demonstrate: More elements near the contact zone Which surface is treated as master (contacting) and slave (contacting) The analysis results are presented with linear and parabolic elements.
Analytical SolutionAn analytical solution for this contact problem can be obtained from the Hertzian contact formulae (Hertz, H., ber die Berhrung fester elasticher Krper. J. Reine Angew. Mathm. 92, 156-171, 1881) for two cylinders (line contact). The maximum contact pressure is given by:p max = F n E* -----------------2BR*
where F n is the applied normal force, E* the combined elasticity modulus, B the length of the cylinder and R* the combined radius. The contact width 2a is given by:a = 8F n R* ---------------BE*
Using the normalized coordinate = x a with x the Cartesian x-coordinate, the pressure distribution is given by:p = p max 1 2
The combined elasticity modulus is determined from the modulus of elasticity and Poissons ratio of the cylinder and block E cylinder , E block , cylinder , and blo ck , as follows:2E cylinder E block E* = -------------------------------------------------------------------------------------------------------------2 2 E block 1 cylinder + E cylinder 1 block
CHAPTER 1 21 2-D Cylindrical Roller Contact
The combined radius of curvature is evaluated from the radius of curvature of the cylinder and block R cylind er and R block , as follows:R cylinder R block R* = ------------------------------------------R cylinder + R block
For the target solution, the block is approximated with an infinitely large radius. The combined radius is then evaluated as:R* =R block
lim
R cylin der R block ------------------------------------------- = R cylinder R cylinder + R block
Using the numerical parameters for the problems the following results are obtained:a = 6.21mm p max = 3585.37N mm 2
Note that half the contact length is equal to 6.21 mm which corresponds to approximately 7.1 degrees of the ring. Hence, it is clear that, in order to simulate this problem correctly, a very fine mesh near the contact zone is needed.
FEM SolutionsA numerical solution has been obtained with MD Nastrans solution sequence 400 (SOL 400) for the element mesh shown in Figure 1-1 using plane strain linear elements. The elements in the entire cylinder and entire block have been selected as contact bodies. Contact body IDs 5 and 6 are identified as a set of elements of the block and cylinder respectively as:BCBODY BSURF ... 5 5 2D 1 DEFORM 2 5 3 0 4 .1 5 6 7
andBCBODY BSURF ... 6 6 2D 1242 DEFORM 1243 6 1244 0 1245 .1 1246 1247 1248
Furthermore, the BCTABLE entries shown below identify that these bodies can touch each other:BCTABLE 0 SLAVE 6 0 MASTERS 5 1 SLAVE 6 0 MASTERS 5 0. 0 0. 0 1 0. 0 1 0. 0 .1 0. 0 0.
BCTABLE
.1
0.
0
0.
Thus, any deformable contact body is simply a collection of mutually exclusive elements and their associated nodes. The order of these bodies is important and is discussed later. For the simulations with friction, a bilinear Coulomb model is used (FTYPE = 6). The slave or contacting nodes are contained in the elements in the cylinder, whereas the master nodes or nodes or contacted segments are contained in the elements in the block.
22 MD Demonstration ProblemsCHAPTER 1
Steel Cylinder
Contact Body ID 6 Element IDs 1242 to 2641
Aluminium BlockY Z X
Contact Body ID 5 Element IDs 1 to 1241
Figure 1-1
Element Mesh Applied in Target Solution with MD Nastran
Nonlinear plane strain elements are chosen by the PSHLN2 entry referring to the PLPLANE option as shown below.PLPLANE 1 PSHLN2 1 + C4 1 1 PLSTRN 1 L + +
Herein referred to as plane strain quad4 elements (PLSTRN QUAD4) or (PLSTRN QUAD8) for the linear and parabolic elements respectively listed in Table 1-1. All elements are 1 mm thick in the out-of-plane direction. Table 1-1 linear parabolic Applied Element Types in Numerical Solutions SOL 400PLSTRN QUAD4 PLSTRN QUAD8
The material properties are isotropic and elastic with Youngs modulus and Poissons ratio defined as:$ Material Record : steel MAT1 1 210000. $ Material Record : aluminum MAT1 2 70000. .3 .3
The nonlinear procedure used is:NLPARM 1 1 PFNT
Here the PFNT option is selected to update the stiffness matrix during every iteration using the full Newton-Raphson iteration strategy; the default convergence tolerance values (0.01) will be used. The convergence method and tolerances may be specified explicitly as shown here since they will be discussed later.
CHAPTER 1 23 2-D Cylindrical Roller Contact
Table 1-2 1NLPARM +pb1
Nonlinear Control Parameters 21 1.00E-02
31 1.00E-02
41.00E-05
5PFNT
6
7
8UP
9
10+pb1
The obtained lengths of the contact zones are listed in Table 1-3. The exact length of the contact zone cannot be determined due to the discrete character of contact detection algorithms (nodes are detected to be in contact with an element edge for 2-D, element face for 3-D). It is clear, however, that the numerical solution is in good agreement with the analytical one. Table 1-3 Length of the Contact Zone and Pmax amin (mm) linear parabolic 5.99 5.88 aavg (mm) 6.33 6.08 amax (mm) 6.67 6.28 Error (%) 2.6 -1.5 Pmax (N/mm2) 3285 3583 Error (%) -8.38 -0.05
The deformed structure plot (magnification factor 1.0) is shown in Figure 1-2. A plot of the Hertzian contact solution for the pressure along the contact surface is obtained with linear and parabolic elements as shown in Figure 1-3 and Figure 1-4.
amax amin Contacting Nodes
Contacted Nodes
Figure 1-2
Deformed Structure Plot at Maximum Load Level (magnification factor = 1)
24 MD Demonstration ProblemsCHAPTER 1
5000 4000 3000 2000 1000 0 0
Contact Pressure N/mm 2Analytical SOL 400 Contacted Surface SOL 400 Contacting Surface
1
2
3
4
5
6
7
8
Distance (mm)
Figure 1-3
Comparison of Analytical and Numerical Solutions for Linear Elements without Friction
5000 4000 3000 2000 1000 0 0
Contact Pressure N/mm 2Analytical SOL 400 Contacting Surface SOL 400 Contacted Surface
1
2
3
4
5
6
7
8
Distance (mm)Figure 1-4 Comparison of Analytical and Numerical Solutions for Parabolic Elements without Friction
The contact pressure plotted for the contacting nodes shows, even with this mesh density, an oscillating type of behavior. This is reduced for the parabolic elements. Generating the same plots along the contacted nodes produces a smoother curve. Numerical solutions have also been obtained with a friction coefficient of 0.1 (bilinear Coulomb). The contact normal and tangential stress along the contacting nodes are shown in Figure 1-5. All stresses show an oscillating type of behavior. This can be improved by refining the mesh in the contact zone.
CHAPTER 1 25 2-D Cylindrical Roller Contact
5000 4000 3000 2000 1000 0 0
Contact Stress N/mm 2
Pressure Linear Pressure Parabolic Tangential Linear Tangential Parabolic
1
2
3
4
5
6
7
8
Distance (mm)Figure 1-5 Normal and Tangential Stress Along Contact Surface
Modeling TipsAbout ConvergenceAlthough the nonlinearity of the force-displacement relation in this problem is quite mild, looking more closely at the convergence of this problem will be useful for subsequent problems in this manual, and worthy of mention here as a matter of introduction. Table 1-4 controls the number of iterations in the Newton-Raphson process illustrated below in Figure 1-6. Table 1-4 Load Step 1 1 1 1 1 1 1 Convergence Output Error Factors No. Inc 1 1 1 1 1 1 1 IRT 1 2 3 4 5 6 7 Disp 1.00E+00 3.70E+00 2.80E+00 1.43E+00 4.96E-01 3.72E-04 6.00E-05 Load 9.78E-01 8.83E-01 6.83E-01 3.81E-01 7.28E-02 1.51E-02 2.69E-05 Work 9.78E-01 4.57E+00 3.98E+00 2.26E+00 8.84E-01 9.98E-04 8.69E-05
26 MD Demonstration ProblemsCHAPTER 1
60000 50000 40000 30000 20000 10000
Load Fy (N) Fy , v2
Newton-Raphson PathPoint C
Point D Applied Load = 17500 Point B Displacement v (mm)
Point A
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Figure 1-6
Newton - Raphson Path for Load-Displacement Curve
At the beginning of the analysis (Point A in Figure 1-6), the tangent modulus (slope of load-displacement curve) is used to project to the applied load to Point B, which does not satisfy the convergence criteria. Then equilibrium is reestablished at Point C, and a new slope is computed. The Newton-Raphson iterative procedure continues until the convergence tolerances are satisfied, Point D. The convergence criteria are based upon displacement, load or work either individually or in some combination. The Newton-Raphson iterative scheme is recommended for all SOL 400 analyses because the degree of nonlinearity is typically significant. For the parameters in Table 1-3, the output (Table 1-4) shows the following convergence characteristics. The percent sign helps to locate the line in the output file. In this case, the criteria used is both the displacement, U, and load, P - specified through the UP keyword for the convergence type on the NLPARM command - with a value of 0.01 for each. This means that both relative displacement and load measures (error factors) must be below 0.01 for convergence to be permitted. This can be seen in Figure 1-7. In this case, there is no checking on the work, even though it has a low tolerance.1 0 -1 -2 -3 -4 -5 Log(epsw) Log(epsp = epsu) Log(work) Log(disp) Log(load)
Figure 1-7
Error Factors For Each Iteration
About the Order of Contact Bodies The nug_01aw.dat input file changes the order of the contact body detection, in which the coarser mesh (block) is the contacting surface. Although acceptable to the contact algorithm, the results are degraded since it is best to have
CHAPTER 1 27 2-D Cylindrical Roller Contact
the body with the most nodes as the contacting body. Run nug_01aw.dat to see the differences as shown in Figure 1-8.
nug-01aw.datSteel CylinderContacted Nodes
nug-01am.datSteel CylinderContacting Nodes
Contacting Nodes
Contacted Nodes
Aluminium Block
Aluminium Block
Figure 1-8
Deformed Mesh of Different Contact Body Ordering
28 MD Demonstration ProblemsCHAPTER 1
Pre- and Postprocess with SimXpertUnitsAll data imported or created in MSC SimXpert is assumed to be in a single consistent system of units, as specified in the Unit Manager. It is important to specify the appropriate units prior to importing any unitless analysis files, such as an MD Nastran bulk data file, or creating materials, element properties, or loads. This is so that the MSC SimXpert user is assisted in being consistent with the use of numerical quantities that have units. The system of units is specified in a dialog accessed by selecting Tools: Units Manager. For the illustration below, the geometry is created, meshed with linear elements using frictionless contact, and finished by comparing results with the analytic solution.a. Tools b. Options c. Units Manager d. Basic Units
a
c d
b
CHAPTER 1 29 2-D Cylindrical Roller Contact
Create a Part for the BlockParts are the main components of a model and may be used to specify specific attributes (geometry, properties etc.). For example, here the part/block, is created (bottom right) that will be later used by picking the part from the model tree in the Model Browser (bottom left). We will find that in defining material properties picking parts from the model tree is easier than trying to pick a group of elements. Later the last part, cylinder, is created.a. Assemble b. Create Part c. block; click OK
a b
c
30 MD Demonstration ProblemsCHAPTER 1
Create the Block GeometryThe geometry of the part/block, is created here and results in a simple rectangular shaped object. More geometry is added to this part in subsequent steps.a. Geometry b. Filler c. X, Y, Z Input enter 0,200,0; click OK X, Y, Z Input enter 30,200,0; click OK X, Y, Z Input enter 30,170,0; click OK X, Y, Z Input enter 0,170,0; click OK
p
( p
)
a b
c c
CHAPTER 1 31 2-D Cylindrical Roller Contact
Create a Curve to Define a Surface EdgeContinuing to add geometry to the part/block, a curve (line) is created below the previous rectangle. This curve is used to generate a surface between the rectangle and line.a. Geometry b. Curve c. X, Y, Z Input enter 0,100,0; click OK X, Y, Z Input enter 100,100,0; click OK OK
a b
c c
32 MD Demonstration ProblemsCHAPTER 1
Create a Surface Between Two CurvesNow the surface is generated between the curve on the bottom of the rectangle and the previously created curve. The part/block now contains two surfaces: a rectangle and quadrilateral.a. Geometry b. Filler c. enter 2 Curves; click OK
a b
c
CHAPTER 1 33 2-D Cylindrical Roller Contact
Create a Surface by Defining Its VerticesAnother surface is added using one point and three vertices.a. Geometry b. Filler c. Enter 1 point, 3 vertices; click OK d. X, Y, Z Input enter 100,200,0; click OK
a b
c d
34 MD Demonstration ProblemsCHAPTER 1
Create a Surface by Sweeping a CurveThe final surface added to the part/block, is created by sweeping the bottom horizontal curve downward for 100 mm.a. Geometry b. Sweep c. Vector, two point normal, pick Curve, Length of Sweep; click OK
a
b
c
CHAPTER 1 35 2-D Cylindrical Roller Contact
Stitch SurfacesFinally, all of the surfaces that comprise the part/block, are stitched together. Stitching surfaces creates congruent surfaces with aligned normals within a stitch tolerance. Unconnected or free edges are displayed in red whereas shared edges are displayed in green as shown below.a. Geometry b. Stitch c. 4 bodies; click OK
a
b
1 2c
3
4
36 MD Demonstration ProblemsCHAPTER 1
Create a Part: CylinderNow the cylinder part is created.a. Assemble b. Create Part c. Cylinder; click OK
c. cylinder, OKb
a
c
CHAPTER 1 37 2-D Cylindrical Roller Contact
Create an ArcThe cylindrical surface is generated by an arc and a line. The arc is defined below.a. Geometry b. Arc c. Dir-Radius 0,250,0;0,250,-1 d. Arc.1, 40,0,180 VERTEX(indicated); click OK
a b
c
d
38 MD Demonstration ProblemsCHAPTER 1
Create a Curve Along a Line of SymmetryThe cylindrical surface is generated by an arc and a line. The line is defined below.a. Geometry b. Curve c. 2 Vertices; click OK
a b
c
CHAPTER 1 39 2-D Cylindrical Roller Contact
Break Line and Arc into Two Curves for Two SurfacesBefore generating a surface from these two curves, each curve (line and arc) is broken into two equal pieces respectively. This allows for generating two surfaces that ultimately generate different meshes.a. Geometry b. Edit Curve c. Split d. Parametric, 2 Curves; click OK
a b
c
d
40 MD Demonstration ProblemsCHAPTER 1
Create Surfaces from CurvesTwo surfaces (composing half of the cylinder) are generated from the curves previously constructed and are stitched together.a. Geometry b. Filler c. 2 Curves, click OK (repeat for other 2 curves d. Stitch, 2 surfaces; click OK
a b
c
d
CHAPTER 1 41 2-D Cylindrical Roller Contact
Create Mesh SeedsWith the parts completed, each curve of each surface is seeded prior to meshing. Here the curves that comprise the surface of the lower portion of the cylinder are seeded with element sizes that include uniform and biased seeds.a. Meshing b. Seed: Arrows on curves indicate direction for nonuniform mesh seed c. Curve (seed as indicated in the 3 curves); click OK
a
b
c
42 MD Demonstration ProblemsCHAPTER 1
Create MeshWith the curves of this surface seeded, a quadrilateral dominate mesh is created by using the surface mesher.a. Meshing b. Surface c. Pick Surface, Mesh type and Method (indicated) d. Element Size 1 e. Quad Dominant f. OKyp ( )
a b
c d
e
f
CHAPTER 1 43 2-D Cylindrical Roller Contact
Create MeshThe top cylindrical surface is meshed with a quadrilateral dominate mesh and the cylindrical part meshing is complete.a. Meshing b. Surface c. Pick Surface d. Element Size 2.5 e. Quad Dominant f. OK
a b
c
d
e
f
44 MD Demonstration ProblemsCHAPTER 1
Create MeshThe block part consists of four surfaces that are now to be meshed with the smallest rectangular surface being mesh with uniform elements with the indicated size using a quadrilateral dominate mapped mesher.a. Meshing b. Surface c. Pick Surface d. Element Size 1.5 e. Quad Dominant f. OK
a b
c
d
e
f
CHAPTER 1 45 2-D Cylindrical Roller Contact
Create Mesh SeedsThe upper quadrilateral surface curves are seeded appropriately, and the surface is meshed. A similar exercise is done for the lower quadrilateral surface (not shown).a. Meshing b. Seed: Arrows on Curves indicate direction for nonuniform mesh seed c. Surface OK
a b
c b
b
46 MD Demonstration ProblemsCHAPTER 1
Create MeshFinally, the lower rectangular surface of the block is meshed using the mapped mesher with uniform element sizes.a. Meshing b. Surface c. Pick Surface d. Element Size 5 e. Quad Dominant f. OK g. Pick Surface h. Element Size 5 i. Quad Dominant j. OK
a b
c
d
e
g
f
h
i
j
CHAPTER 1 47 2-D Cylindrical Roller Contact
Enforce Consistent NormalsAlthough the surfaces of the cylinder and block parts were stitched together, the surface mesher may create elements with inconsistent outward normals. This is the case here, and elements need to be fixed such that their outward normals all point in one direction (+z). This is done by showing the element normals, then fixing the normals using a reference element to set the normal direction. Continue this process until all normals are consistent; namely, they all point in the same direction.a. Quality b. Fix Elements c. Normals d. Show (Fix) Normals, click OK
a c
b
d d
48 MD Demonstration ProblemsCHAPTER 1
Define Material DataMaterials are defined by naming the material (steel and Al, respectively) while entering the properties. The problem statement required that the cylinder be made of steel and the block made of aluminum (Al). Since the basic units selected have derived units of pressure (stress or modulus) as N mm 2 , Youngs modulus for the steel is entered as 210x10 3 and 70x10 3 for aluminum. Poissons ratio is dimensionless and entered as 0.3 for both materials.a. Materials and Properties b. Isotropic c. steel, (properties); click OK d. Al, (properties as shown); click OK
d. Al, (properties), OKb
a
c
d
CHAPTER 1 49 2-D Cylindrical Roller Contact
Define Material DataThe properties defined are now applied to the parts accordingly along with the planar element properties. Parts and materials are selected from the Model tree (not shown).a. Materials and Properties b. Plane c. Plane Property (cylinder and block); click OK
c. Plane Property (cylinder and block), OK a
b
c
50 MD Demonstration ProblemsCHAPTER 1
Contact Data for CylinderSince the cylinder will come into contact with the block, contact data needs to be specified. A contact body consists of a set of elements and their associated nodes that are mutually exclusive from other elements. While we know that only a small number of elements in the cylinder and block will ultimately come into contact, there is no need to specify this information; the contact algorithm completely determines where and when contact happens. Hence, our choice is simple. We will create two contact bodies, consisting of all elements in the two parts we have defined: the cylinder and block. Although one might be tempted to only pick those elements suspected of coming into contact, it is best (and less time consuming) to just pick all the elements in the part as done here.a. Loads and Boundary Conditions (LBC) b. Deformable Body c. Select cylinder; click OK
b. Deformable Body c. Select cylinder, OK
a b
c
CHAPTER 1 51 2-D Cylindrical Roller Contact
Contact Data for BlockSimilar to the cylinder contact body, all elements in the block are selected to be in the next deformable contact body.a. Loads and Boundary Conditions (LBC) b. Deformable Body c. Select block; click OK
a b
Define a deformable contact body for the block
c
52 MD Demonstration ProblemsCHAPTER 1
Define Contact TablesAlthough a contact table is not necessary for this particular problem (see BCONTACT = ALLBODY in the QRG), one is used here for illustration. Here, the contact table indicates that all contact bodies touch each other, including themselves. In general, contact tables describe how contact is to take place between contact bodies (touching, glue, none) and may change during the analysis by selecting different contact tables. A contact table allows one to define the coefficient of friction between the two touching bodies and its nonzero value overrides any previous value.a. Loads and Boundary Conditions (LBC) b. Table c. BCTABLE_INIT; click OK
c. BCTABLE_INIT
a
b
c
CHAPTER 1 53 2-D Cylindrical Roller Contact
Define ConstraintsThe horizontal component of displacement for all nodes on the symmetry plane is fixed to be zero by selecting the associated curves.a. Loads and Boundary Conditions (LBC) b. General c. Symmetry (Tx = 0 only) d. 5 Curves; click OK
y
y(
y)
d. 5 Curves, OK
a
b
c
d
54 MD Demonstration ProblemsCHAPTER 1
Define ConstraintsThe horizontal and vertical displacement components of all nodes on the bottom of the block are fixed by selecting the associated curve.a. Loads and Boundary Conditions (LBC) b. General c. Bottom (Tx, Ty = 0 only) d. 1 Curve; click OK
c. Bottom (Tx, Ty
0 only)
d. 1 Curve, OK
a
b
c
d
CHAPTER 1 55 2-D Cylindrical Roller Contact
Define Point LoadThe load of 35 kN is applied to the top node in the downward direction. However, since only half of the material is being modeled because of the plane of symmetry, a load of 17.5 = 35/2 kN is applied to this half of the model.a. Loads and Boundary Conditions (LBC) b. Force c. 1 Node d. 17500, (direction); click OK
d. 17500, (direction), OKb
a
c d
56 MD Demonstration ProblemsCHAPTER 1
Create Nastran SOL 400 Job with Default LayoutAn analysis job is set up using a general nonlinear analysis type (SOL 400) and the name of the solver input file is specified.a. Right click File Set Create new Nastran job b. Job Name c. General Nonlinear Analysis (SOL 400) d. Name input file; click OK
p
a b
c d
CHAPTER 1 57 2-D Cylindrical Roller Contact
Create Nastran SOL 400 Job with Default LayoutThe global loadcase is created and the initial contact table is selected.a. Right click Load Cases b. Create Global Loadcase OK c. Under Global Loadcase, Right click Loads/Boundary Conditions d. Select Contact Table BCTABLE_INIT; click OK
a b
c
d
58 MD Demonstration ProblemsCHAPTER 1
Select Contact Table BCTABLE_INIT for Loadcase DefaultLoadCaseThe default loadcase is created using the same contact table.a. Right click Loads/Boundaries under DefaultLoadCase b. Select Contact Table c. Select Contact Table BCTABLE_INIT d. Click OK
c
a
d
b
CHAPTER 1 59 2-D Cylindrical Roller Contact
Define Large Disp. and Contact in SOL 400 Nonlinear ParametersHere, we are specifying some nonlinear parameters that allow forces to follow in a large displacement analysis and set the bias factor used in contact detection.a. Double click Solver Control b. Select Solution 400 Nonlinear Parameters c. Large Disp and Follower Force, Apply d. Contact Control Parameters e. Bias = 0.90 f. click Apply g. click Close
b
c a
d
e
f g
60 MD Demonstration ProblemsCHAPTER 1
Define Nonlinear Static ParametersFinishing the selection of nonlinear parameters, we select the stiffness update method along with convergence criteria.a. Loadcase Control b. Subcase Nonlinear Static Parameters c. Pure Full Newton, 1, 50 d. Check Displacement error, enter 1.0e-2 e. Check Force Error, enter 1.0e-2 f. Check Vector Component Method
b c
d a e
f
CHAPTER 1 61 2-D Cylindrical Roller Contact
Request OutputIn order to visualize results, nodal and elemental output requests are made.a. Output Request b. Nodal Output Requests c. Create Constraint Force output Request; click OK d. Elemental Output e. Create Nonlinear Stress Output,; click OK
d a b c e
62 MD Demonstration ProblemsCHAPTER 1
Run AnalysisThe preprocessing is now complete and the job is submitted. Upon successful completion of the job, the results are attached and visualized.a. Right click job, cylinder_roller_contact, under Simulations b. Run.
a
b
CHAPTER 1 63 2-D Cylindrical Roller Contact
ResultsThe results are attached.a. Attach Results b. Select *_xdb file
a b Select *.xdb file
64 MD Demonstration ProblemsCHAPTER 1
Results - Fringe PlotA fringe plot of the Y-component of the Cauchy stress tensor is plotted below.a. Results b. Fringe c. Cauchy Stress d. Y Component e. Update
b. Fringe c. Cauchy Stress d. Y Component e. Update
a
b
c d
e
CHAPTER 1 65 2-D Cylindrical Roller Contact
Results - Chart DataSince the contact area is very small, it is useful to plot the Y component of Cauchy stress along the X component of the nodal positions, which is done by constructing the chart below.a. Results b. Chart c. Stress, Y Comp., Nodes d. Advanced Picking Tool e. From Curve f. Select Curve g. X Global h. Add Curvesa. Results
b. Chart c. Stress, Y Comp., Nodes d. Advanced Picking Tool e. From Curve f. Select Curve g. X Global h. Add Curves
b a d
h
c g
e
f
66 MD Demonstration ProblemsCHAPTER 1
Chart Data - Exporting Chart to ExcelUltimately, we wish to compare the data contained in the chart above with the analytical solution. The results in the chart can be extracted to the clipboard by selecting the Table under XY Chart Properties; then right click the table, Select All, and then copy. Once in the clipboard, the data can be pasted into Excel to be used in further comparisons.a. XY Chart Properties, Check Table b. Mouse on Table, Select All, Copy c. Paste into Excel
a
c
b
CHAPTER 1 67 2-D Cylindrical Roller Contact
Chart Data - Exporting Chart to ExcelThe chart data in the clipboard one pasted into Excel is then compared to the analytical solution.a. Plot with Analytical Solution in Excel
Chart Data - Exporting Chart to Excel a. Plot with Analytical Solution in Excela
68 MD Demonstration ProblemsCHAPTER 1
Input File(s)Snippets from the first four Nastran input files listed below are used to illustrate the simulation throughout various sections of this chapter except the section, Pre- and Postprocess with SimXpert. This later section illustrates the simulation using the SimXpert workspace environment, instead of the Nastran input file(s). While both illustrations ultimately lead to the same solution, viewing the simulation from these two different viewpoints facilitates a better understanding of how to perform the simulation. For example, nug_01am.dat, uses contact body IDs 5 and 6 as the set of elements for the block and cylinder, respectively; whereas the input file, ch01.bdf, (derived from the SimXpert workspaces database, ch01.SimXpert) uses contact body IDs 1 and 2 as the set of elements for the block and cylinder, respectively. It is important to understand that while the contact bodies in these two input files are different (they use different IDs with a different set of elements), they yield the same solution since the loads, boundary conditions, and material properties are the same. File nug_01am.dat nug_01aw.dat nug_01bm.dat nug_01cm.dat nug_01dm.dat ch01.SimXpert ch01.bdf Description Linear Elements Without Friction Same as above but contact bodies are in wrong order Linear Elements With Friction Parabolic Elements Without Friction Parabolic Elements With Friction SimXpert Model Nastran input model (Linear Elements Without Friction)
Chapter 2: 3-D Punch (Rounded Edges) Contact
2
3-D Punch (Rounded Edges) Contact
Summary Introduction
70 71 71
Requested Solutions FEM Solutions Results 74 71
General Analysis Tips Input File(s) Video 78 78
77
70 MD Demonstration ProblemsCHAPTER 2
SummaryTitle Contact features Chapter 2: 3-D Punch (Rounded Edges) Contact Axisymmetric/3-D contact Analytical deformable body contact Friction along deformable-deformable contact plane Comparison of linear and parabolic elements Material properties Analysis type Punch Diameter = 100 Punch Height = 100 Foundation Diameter = 200 Foundation Height = 200 Fillet radius at edge of punch contact = 10
Geometry
Axisymmetric and 3-D continuum elements (units: mm)
E punch = 210kN mm 2 E foundation = 70kN mm 2 punch = foundation = 0.3
Linear elastic material Geometric nonlinearity Nonlinear boundary conditions Symmetry displacement constraints in 3-D model (quarter symmetry) Noncontacting surface of the foundation is fixed u x = u y = u z = 0 A uniform pressure (distributed load) is applied to the punch in the axial direction,P = 100N mm 2
Boundary conditions Applied loads Element type
Axisymmetric 4-node linear elements 8-node parabolic elements Coefficient of friction = 0.0 and = 0.1
3-D continuum 8-node linear elements
Contact properties FE results
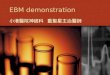
1. Plot of contact pressure versus radius 2. Plot of contact normal force and friction force versus radius 3. Plot of radial displacement and relative tangential slip versus radius0.005 0.000 -0.005 -0.010 -0.015 -0.020 NAFEMS Friction No Friction No Friction 0Radial Displacement (mm) Radius (mm)
20
40
60 Friction
80
100
CHAPTER 2 71 3-D Punch (Rounded Edges) Contact
IntroductionAn axisymmetric steel punch is compressed on an aluminium cylinder. It is assumed that the material behavior is linear elastic. The punch is loaded by a uniform pressure with magnitude P = 100N mm 2 in the axial direction. The effect of friction is studied along the contact zone. Axisymmetric 2-D solutions are used to serve as a target solution for a 3-D analysis. For the 3-D solutions, one quarter of the assembly is modeled, using symmetry conditions. (Ref: NAFEMS, 2006, Advanced Finite Element Contact Benchmarks, Benchmark 2, 3-D Punch (Rounded Edges) Contact)
Requested SolutionsBoth 2-D (axisymmetric) and 3-D solutions are requested. Two solutions, one frictionless and the other using a friction coefficient of 0.1 between the punch and foundation, are requested. The displacement, force, and stress fields in the contact zone (contacting surface of the punch and contacted surface of the foundation) are of interest and are obtained with both linear and parabolic elements in the axisymmetric case and with linear elements in the 3-D case. The SOL 400 elements specified through suitable extensions to the PLPLANE or PSOLID entries are demonstrated. In the 3-D case, solutions obtained with these elements are also compared to those obtained using existing HEX elements. The solutions presented include: Radial displacement of top contact surface of punch as function of coordinate. Contact force, friction force, and contact pressure distributions as a function of coordinate.
FEM SolutionsNumerical solutions have been obtained with MD Nastrans solution sequence 400 for multiple 2-D axisymmetric and 3-D cases. The axisymmetric cases include linear and parabolic elements, with and without friction. The 3-D case includes linear elements with and without friction. The contact, material, geometry, convergence, and other parameters are explained below - primarily with respect to the axisymmetric linear element case and are representative for both 2-D and 3-D cases.
Contact ParametersThe element mesh using axisymmetric linear elements is shown in Figure 2-1 and is further described as follows: Two contact bodies, one identified as the punch and the other identified as the foundation, are used. Pressure is applied at the top of the punch in the axial direction. The bottom of the punch, in turn, compresses the foundation. Typical element length along the punch and foundation is 4 mm and 3.5 mm, respectively. Contact body ID 4 is used to identify the punch and body ID 5 is used to identify the foundation.BCBODY 4 BSURF 4 ........ BCBODY 5 BSURF 5 .......... 2D 1 DEFORM 2 4 3 0 4 .1 5 -1 6 7
2D 229
DEFORM 230
5 231
0 232
.1 233
234
235
72 MD Demonstration ProblemsCHAPTER 2
BCBODY with ID 4 is identified as a two-dimensional deformable body with BSURF ID 4 and friction coefficient of 0.1. Furthermore, -1 on the 8th field indicates that BCBODY 4 is described as an analytical body, wherein the discrete
facets associated with the element edges are internally enhanced by using cubic splines. Since the punch has rounded edges in the contact zone, using an enhanced spline representation of the punch yields better accuracy. The minus sign indicates that the nodal locations defining the spline discontinuities are automatically determined. Note that since the foundation is a rectangular shape with sharp angles, using the spline option with this body is not necessary since it would only increase the computational cost without an associated improvement in accuracy.
Figure 2-1
Element Mesh used for Axisymmetric Case in MD Nastran (Benchmark 2)
The BCTABLE bulk data entries shown below identify the touching conditions between the bodies:BCTABLE 0 SLAVE 4 0 MASTERS 5 1 SLAVE 4 0 MASTERS 5 0. 0 0. 0 1 0. 0 1 0. 0 .1 0. 0 0.
BCTABLE
.1
0.
0
0.
BCTABLE with ID 0 is used to define the touching conditions at the start of the analysis. It should be noted that this is a required option that is required in SOL 400 for contact analysis. It is flagged in the case control section through the optional BCONTACT = 0 option. Note that BCTABLE 0 and other contact cards with ID 0 (e.g., BCPARA 0) would be applied at the start of the analysis even without the BCONTACT = 0 option. For later increments in the analysis,
CHAPTER 2 73 3-D Punch (Rounded Edges) Contact
BCONTACT = 1 in the case control section indicates that BCTABLE with ID 1 is to be used to define the touching conditions between the punch and the foundation.
The BCPARA bulk data entry shown below for the frictional linear axisymmetric case defines the general contact parameters to be used in the analysis:BCPARA 0 FTYPE 6 NBODIES 2 BIAS MAXENT 84 9.0E-01 ISPLIT MAXNOD 3 84 RVCNST 1.0E-04
Note that ID 0 on the BCPARA option indicates that the parameters specified herein are applied right at the start of the analysis and are maintained through the analysis unless some of these parameters are redefined through the BCTABLE option. Important entries under BCPARA option include FTYPE - the friction type, RVCNST - the slip-threshold value and the BIAS - the distance tolerance bias. As per general recommendation, BIAS is set to 0.9 (note that the default value of BIAS is 0.9). For the frictional case, FTYPE is set to 6 (bilinear Coulomb model) and RVCNST is set to 1e-4 (this is a non-default value that is used in this particular problem - the need for a non-default value is discussed in more detail later). Note that when other parameters on the BCPARA option like ERROR (distance tolerance), FNTOL (separation force) are not specified, left as blank or specified as 0, program calculated defaults are used. It should also be noted that while the BCPARA parameters generally apply to all the bodies throughout the analysis, some of the parameters like ERROR, BIAS, FNTOL can be redefined via the BCTABLE option for specific body combinations and for specific times through the analysis.
Material/Geometry ParametersThe two material properties used herein for the punch and foundation are isotropic and elastic with Youngs modulus and Poissons ratio defined as$ Material Record : steel MAT1 1 210000. $ Material Record : aluminum MAT1 2 70000. .3 .3
For the 2-D case, axisymmetric elements are chosen via the CQUADX option pointing to a PLPLANE entry which in turn, points to an auxiliary PSHLN2 entry as shown below.PLPLANE 1 PSHLN2 1 + C4 + C8 1 1 1 AXSOLID L AXSOLID Q + +
where the C4 entries indicate that linear 4-noded full integration axisymmetric solid elements are to be used and the C8 entries indicate that parabolic 8-noded full integration axisymmetric solid elements are to be used. Note that the PSHLN2 entry enables SOL 400 to access a robust 2-D element library featuring linear and parabolic plane stress, plane strain or axisymmetric elements. Multiple element topologies (4-noded, 6-noded, 8-noded) can be defined as plane stress, plane strain, or axisymmetric through the PSHLN2 options. These elements which can be used for isotropic/orthotropic/ anisotropic elastic/elasto-plastic applications augment previous SOL 400 hyperelastic element technology that could be used in conjunction with the PLPLANE and MATHP options. For the 3-D case, hex elements are chosen via the CHEXA option pointing to a PSOLID entry. For elastic or small strain applications, the user has two choices: Use existing 3-D solid elements with just the PSOLID option or use 3-D solid element technology accessed by the PSOLID entry pointing to an auxiliary PSLDN1 entry. For large strain elastoplastic applications, the user should always use the 3-D solid elements; i.e., the primary usage of the 3-D solid
74 MD Demonstration ProblemsCHAPTER 2
elements is for large strain elasto-plasticity for which the PSLDN1 + NLMOPTS,LRGSTRN,1 bulk data entry is recommended. However, as in the current example, these elements can also be used for elastic applications when used in conjunction with PSLDN1 and with NLMOPTS,ASSM,ASSUMED entry.
Convergence ParametersThe nonlinear procedure used is defined through the NLPARM entry:NLPARM 1 10 PFNT 0 25 UP YES
where 10 indicates the total number of increments; PFNT represents Full Newton-Raphson Technique, wherein the stiffness is reformed at every iteration; KSTEP = 0 in conjunction with PFNT indicates that the program automatically determines whether the stiffness needs to be reformed after the previous load increment is completed and the next load increment is commenced. The maximum number of allowed recycles is 25 for every increment and if this were to be exceeded, the load step would be cut-back and the increment repeated. UP indicates that convergence will be checked using both displacements (U) and residual criteria (P). YES indicates that intermediate output will be produced after every increment (note that this has been turned to NO for the 3-D case due to voluminous output). The second line of NLPARM is omitted here, which implies that default convergence tolerances of 0.01 will be used for U and P. It should be noted that the PFNT iterative method used conducts checking over incremental displacements and is generally more stringent than for the FNT iterative method which convergence is checked over weighted total displacements.
Case Control ParametersSome of the case control entries to conduct these analyses are highlighted as follows: SUBCASE 1 indicates the case being considered. There are no STEP entries in this analysis since a single loading sequence is being considered. For multiple loading sequences that follow one another, STEP entries can be used within a single SUBCASE to identify each sequence. BCONTACT = 1 is used to indicate the contact parameters for SUBCASE 1. NLPARM = 1 is used to flag the nonlinear procedure for SUBCASE 1. In addition to regular output requests like DISPLACEMENTS, STRESSES, the option that is required for contact related output in the F06 file is BOUTPUT. It should be noted that with the BOUTPUT option, one can obtain normal contact forces, frictional forces, contact normal stress magnitudes, and contact status for the contact nodes.
ResultsThe radial displacements obtained for the frictionless and frictional cases for the linear axisymmetric element case are compared in Figure 2-2. The results match very well with the corresponding NAFEMS results (Benchmark 2 of NAFEMS 2006). It is noteworthy to study the effect of the slip threshold value, RVCNST, on the friction results. The radial displacements for two different values of RVCNST are compared in Figure 2-3. It is seen that RVCNST has a significant influence on the radial displacements. It should be noted that the default value of RVCNST is calculated as 0.0025 times the average edge length of all elements that can participate in contact. For the linear axisymmetric problem, the default RVCNST is of the order of 0.015. Relative radial displacements which are smaller than this value imply a transition
CHAPTER 2 75 3-D Punch (Rounded Edges) Contact
zone and the frictional force linearly increases from 0 to the peak value within this zone. In order to capture the frictional force and the relative sliding more accurately, a smaller value of RVCNST (= 1e-4) is required in this problem. In general, for friction problems, a good check to be made from the f06 file or by postprocessing is whether the friction force is of the order of F n , where is the friction coefficient and F n is the nodal contact normal force.
0.005 0.000 -0.005 -0.010 -0.015 -0.020 0
Radial Displacement (mm) Radius (mm)
20
40
60 Friction
80
100
No Friction NAFEMS Friction No Friction
Figure 2-2
Radial Displacement as Function of the Radial Coordinate (friction coefficient =0.0 and 0.1) Obtained with Linear Axisymmetric Elements
0.005 0.000 -0.005 -0.010 -0.015 0
Radial Displacement (mm) Distance (mm)
20
40
60
80
100
= 0.1 RVCNST=1e-4
= 0.1 RVCNST=default No Friction
-0.020Figure 2-3 Effect of slip threshold value, RVCNST, on Radial Displacement
The contact normal force and friction force along the punch for the linear axisymmetric element is plotted in Figure 2-4. It is instructive to check that equilibrium is well-maintained (the sum of the contact forces transmitted via the punch should be equal to the total force being applied to the punch). It can be shown that the sum of all contact forces at the punch-foundation interface is within .03% of the total force applied on the punch 2 =PR punch = 10050 2 = 7.85e5N . Also, the friction forces are about 0.1 times the contact normal forces.
76 MD Demonstration ProblemsCHAPTER 2
The contact pressure is plotted for the contacting nodes for both the linear and parabolic axisymmetric elements of the punch in Figure 2-5. The parabolic solution shows a rather oscillating type of behavior. Also, as may be expected, the parabolic solution shows a more localized stress peak. These trends are consistent with the NAFEMS benchmark 2 results. The oscillatory behavior can be improved by refining the mesh in the contact zone (and the surrounding part assuring connection with the remaining part of the structures).Force (N)
350000 300000 250000 200000 150000 100000 50000 0 0 10 20 30 40 Contact Normal Force Contact Friction ForceDistance (mm)
50
60
Figure 2-4
Contact Normal Force and Friction Force at Punch as a Function of Radial Coordinate Along Punch-Foundation Contact Interface
Contact Normal Stress (N/mm 2) 800 Parabolic Elements 700 600 500 400 300 200 100 0 0 10 20 30 40Distance (mm)
Linear Elements
50
60
Figure 2-5
Variation of Contact Normal Stress Along Radial Coordinate of Punch for Linear and Parabolic Axisymmetric Elements
The displacement contours in the punch for the 3-D frictional case are shown in Figure 2-6. The left-hand side shows the solution for the 3-D solid elements identified through the PSOLID + PSLDN1 options. The right-hand side shows
CHAPTER 2 77 3-D Punch (Rounded Edges) Contact
the solution for the existing 3-D solid elements identified through the PSOLID options only. As seen, the solutions are very close to each other.
Figure 2-6
Comparison of Punch Displacement Contours in Two different Solid Elements Available in SOL 400
General Analysis Tips While the contact checking algorithm in SOL 400 provides a number of options for the searching order via the ISEARCH parameter on the BCTABLE option, the user should be aware of a few recommendations regarding the touching (slave) body and the touched (master) body: The touching body should be convex, generally be less stiff, and be more finely meshed than the touched body. This allows for better conditioning of the matrices and provides for better nodal contact. Note that these recommendations may not all be satisfied at the same time; for example, in this benchmark, the punch which has been identified as the first body is convex and smaller than the foundation but has a slightly coarser mesh and is somewhat stiffer than the foundation. The accuracy of the friction solution should be judged by checking that the frictional forces at the nodes are generally equal to F n . If this is violated, the slip-threshold value, RVCNST, may need to be adjusted. Note also that to ensure a quality solution with friction, in general, the incremental displacements need to converge well. This can be ensured by using PFNT on the NLPARM option and checking on U. The PSHLN2 entry in conjunction with PLPLANE entries allows the users to flag 2-D elements for plane stress, plane strain, or axisymmetric applications with isotropic/orthotropic/ anistropic elastic/elasto-plastic materials. Similarly, PSLDN1 entries in conjunction with PSOLID entries allows the users to flag nonlinear 3-D solid continuum elements. The 2-D elements offer a range of abilities for small strain and large strain elastic/elasto-plastic analysis. The fundamental application of the 3-D elements is for large strain elastoplastic applications, wherein use should be made of the NLMOPTS,LRGSTRN,1 option to flag appropriate element behavior. It should be noted that the 3-D elements can also be used in the elastic regime (as in this current example - see nug_02em.dat). In such situations, it is highly recommended that one not use NLMOPTS,LRGSTRN,1 but use NLMOPTS,ASSM,ASSUMED to ensure better behavior in elastic bending. Existing 3-D element technology for SOL 400 can be used for elastic applications too (see nug_02en.dat for example). In this case, one simply uses PSOLID without the PSLDN1 addition.
78 MD Demonstration ProblemsCHAPTER 2
For the axisymmetric case, the pressure load is applied through PLOADX1. It should be noted that the pressure value to be specified on the PLOADX1 option is not the force per unit area 100N mm 2 but the pressure over a circular ring of angle 2 Accordingly, on the LOAD bulk data entry, the pressure load is scaled by a value of 2
Input File(s)File nug_02am.dat nug_02bm.dat nug_02cm.dat nug_02dm.dat nug_02em.dat nug_02en.dat nug_02fm.dat nug_02fn.dat Description Axisymmetric Linear Elements Without Friction Axisymmetric Linear Elements With Friction Axisymmetric Parabolic Elements Without Friction Axisymmetric Parabolic Elements With Friction 3-D Linear Elements Without Friction - PSLDN1 used along with PSOLID to flag nonlinear HEX elements 3-D Linear Elements Without Friction - existing HEX element technology flagged throughPSOLID
3-D Linear Elements With Friction - PSLDN1 used along with PSOLID to flag nonlinear HEX elements 3-D Linear Elements With Friction - existing HEX element technology flagged throughPSOLID
VideoClick on the image or caption below to view a streaming video of this problem; it lasts approximately 18 minutes and explains how the steps are performed.
0.005 0.000 -0.005 -0.010 -0.015 -0.020 0
Radial Displacement (mm) Radius (mm)
20
40
60 Friction
80
100
No Friction NAFEMS Friction No Friction
Figure 2-7
Video of the Above Steps
Chapter 3: 3-D Sheet Metal Forming
3
3-D Sheet Metal Forming
Summary Introduction
80 81 81
Solution Requirements FEM Solutions Modeling Tips Input File(s) Video 93 82 92 93
80 MD Demonstration ProblemsCHAPTER 3
SummaryTitle Contact features Chapter 3: 3-D Sheet Metal Forming Rigid and deformable bodies Mesh dependency Elasticity, plasticity and spring back Sliding contact around circular surfacePunch Original Position
Geometry
2-D Plane strain elements or shell elements (units: mm) Punch radius = 23.5 Die radius R2 = 25.0 Die shoulder R3 = 4.0 Width of tools = 50.0 Length of sheet (initially) =120.0 Thickness of sheet = 1.0 Width of sheet = 30.0 Punch stroke = 28.5 Youngs modulus: E = 70.5kN mm 2 Poissons ratio: = 0.342 Initial yield stress: 0 = 194N mm 2 Quasi-static analysis Elastic plastic material (isotropic hardening) Geometric nonlinearity Nonlinear boundary conditions
Sheet Final Position W R2 R3 Die
Material properties
Hollomon hardening: = K n K = 550.4N mm 2 n = 0.223
Analysis type
Displacement boundary conditions Element type Contact properties FE results
Symmetric displacement restraints (half symmetry). Bottom surface fixed. Prescribed vertical displacement for the punch. 2-D Plane strain - 4-node linear elements; 3-D Shell - 4-node shell elements Coefficient of friction = 0.1342 1. Forming angle and angle after release 2. Plot of punch force versus punch displacement compared to experimental values2D Plane Strain With Friction
300 250 200 150 100 50 0 0
Punch Force (N)
SOL 400 Marc
Experimental
5
10
15
20
25
30
Punch Displacement (mm)
CHAPTER 3 81 3-D Sheet Metal Forming
IntroductionThis benchmark problem is an approximation of the Numisheet 2002 Benchmark B problem. Simulations are carried out using MD Nastran solution sequence 400 to find the angles before and after spring back. Experimental results are available for this benchmark, but it is noted that the sheet is slightly anisotropic. The text setup and reference details of these experimental results are given in Figure 3-1. The current problem uses an isotropic elastic-plastic hardening behavior.
SOURCE FREE BENDING BENCHMARK TESTING OF 6111-T4 ALUMINUM ALLOY SAMPLE John C. Brem*, Frederic Barlat**, Joseph M. Fridy** Alcoa Technical Center, Pennsylvania, Numisheet 2002 Conference, Korea
Figure 3-1
Test Setup for Numisheet 2002 - Benchmark B Problem
Solution RequirementsTwo solutions: one using friction coefficient 0.1342 (bilinear Coulomb friction model) between the sheet and both tools, and one frictionless solution are requested for: Forming angle (the angle at the end of the punch stroke) Angle after release (the angle after tool removal) Punch force - punch displacement diagram Figure 3-2 shows the definition of angle . The solutions, obtained with shell elements and plane strain elements, include the following: Element size (in particular near the curved zones) Method used in discretization of the tools Method for normal contact detection (hard/direct contact) Method for stick slip approximation (bilinear Coulomb friction model)
82 MD Demonstration ProblemsCHAPTER 3
Unit: mm A 20 B D C 20
C 20x
y
D
Figure 3-2
Requested Angles for Benchmark 3
FEM SolutionsFEM solutions have been obtained with MD Nastrans solution sequence 400 for the 2-D plane strain and 3-D shell representations of the present sheet metal forming problem. The details of finite element models, contact simulations, material, load, boundary conditions, and solution procedure of both the 2-D plane strain and 3-D shell approaches are discussed.
Finite Element ModelsThe finite element model used for the 2-D plane strain approach is shown in Figure 3-3. The punch and die are modeled in analytical form. The finite element mesh for the sheet contains 850 elements with 5 elements over the thickness. Only half of the sheet is modeled. The applied element lengths can be determined from Table 3-1. MD Nastrans 2-D plane strain solid elements with material ID 1 are selected using the following PLPLANE and PSHLN2 entries. The 30 mm for the width of the sheet is specified in PSHLN2 option.PLPLANE 1 PSHLN2 1 + C4 1 1 PLSTRN 1 L 30.0 +
CHAPTER 3 83 3-D Sheet Metal Forming
Figure 3-3 Table 3-1 Position0 x 27mm 27 x 40.2mm 40.2 x 60mm
FE Model for 2-D Plane Strain Approach Number of Elements in Length Direction (2-D Plane Strain Model) Number of Elements 50 100 20
The finite element model used for the 3-D shell approach is presented in Figure 3-3. Also, in this case, only half of the plate has been modeled with appropriate symmetry conditions at the middle of the plate. The sheet is modeled using 1020 thick shell elements with 6 elements across the width and 170 elements along the length (as in Table 3-2). MD Nastrans thick shell elements with material ID 1 are selected using the following PSHELL and PSHLN1 entries. The thickness 1 mm for the sheet is specified in PSHELL option.PSHELL PSHLN1 + 1 1 C4 1 1 DCT 1. 1 L 1 NO 1 +
Figure 3-4
FE Model for 3-D Shell Approach
84 MD Demonstration ProblemsCHAPTER 3
Table 3-2 Position0 x 40mm 40 x 60mm
Number of Elements in Length Direction (Benchmark 3) Number of Elements 160 10
Contact ModelsIn defining the contact model for the 2-D plane strain case, the sheet is modeled as a deformable body and the punch and die are modeled as rigid bodies. Elements comprising the sheet are used to generate a deformable contact body with ID 4 using the following BCBODY and BSURF entries. Contact body ID 5 is used to define the load controlled rigid body with a control node ID 1 for the punch and contact body ID 6 is used to define the position controlled rigid body for the die. The geometry profiles of these rigid bodies are defined using 2-D NURB curves that describe the true surface geometry and most accurately represent the punch and die geometry. The friction factor of 0.1342 is defined for all these contact bodies.BCBODY BSURF ... BCBODY 4 4 2D 1 DEFORM 2 RIGID 0. 4 3 RIGID 0. 6 2 4 3 0. CBODY2 50 0. CBODY3 50 0 4 0 0. .1342 5 .1342 0. 6 1 0. 7 1 0.
5 2D 0 0. RIGID 1 NURBS2D -3 6 2D 0 0. RIGID 0 NURBS2D -2
... BCBODY
0 0.
.1342 0.
1 0.
-1 0.
...
The contact bodies for the 3-D shell models are also defined in similar way with the punch and die surfaces defined using 3-D NURB surfaces. The following BCBODY entries are used to define contact bodies for 3-D shell model. The control node ID 1198 is used in this case to define the load controlled rigid body for the punch.BCBODY BSURF ... BCBODY 1 1 2 0 RIGID NURBS 3 0 RIGID NURBS 3D 1 3D 0. 1198 -19 3D 0. 0 -7 5 13 DEFORM 2 RIGID 0. 1 4 RIGID 0. 1 3 0. CBODY2 4 0. CBODY3 4 0 4 0 1. 4 0 1. 4 .1342 5 .1342 0. 50 .1342 0. 50 6 1 0. 50 1 0. 50 7 1198 0. 14 -1 0. 0
... BCBODY
...
The following BCPARA bulk data entry defines the general contact parameters to be used in the analysis. The ID 0 on the BCPARA option indicates that the parameters specified herein are applied right at the start of the analysis and are maintained through the analysis unless some of these parameters are redefined through the BCTABLE option. Important entries under BCPARA option include: FTYPE the friction type and the BIAS - the distance tolerance bias. For all the models, the bias factor, BIAS, is set to 0.99. The bilinear Coulomb friction model is activated by setting FTYPE to 6. For the models without friction, FTYPE is set as 0.BCPARA 0 BIAS .99 FTYPE 6
CHAPTER 3 85 3-D Sheet Metal Forming
The following BCTABLE entries identify how the contact bodies can touch each other. The BCTABLE with ID 0 is used to define the touching conditions at the start of the analysis. This is a mandatory option required in SOL 400 for contact analysis and is flagged in the case control section through the optional BCONTACT = 0 option. Similar BCTABLE options with ID 1, 2 and 3 are used to define the touching conditions for later steps in the analysis, and it is flagged using the option BCONTACT = n (where n is the step number 1, 2 or 3) in the case control section. Two contact pairs are defined in the BCTABLE option: one between the sheet and punch and one between the sheet and die. Both the 2D plane strain and 3-D shell models have similar BCTABLE entries.BCTABLE 0 SLAVE 4 0 FBSH MASTERS 5 SLAVE 4 0 FBSH MASTERS 6 0. 0 1.+20 0. 0 1.+20 2 0. 0 .99 0. 0 .99 .1342 0. .1342 0. 0. 0 0. 0
MaterialThe isotropic elastic and elastic- plastic material properties of the sheet are defined using the following MAT1, MATEP, and TABLES1 options. The Hollomon hardening behavior, = K n with K = 550.4N mm 2 ,and n = 0.223 is represented in the form of stress-strain data defined in TABLES1 option.MAT1 MATEP TABLES1 1 1 1 0. .08 .4 .8 1.2 70500. Table 2 194. 313.378 448.681 523.682 573.239 .342 1 .02 .1 .5 .9 1.3 230.043 329.365 471.573 537.619 583.564 1. Isotrop Addmean .04 .2 .6 1. 1.4 268.496 384.423 491.14 550.399 593.287 .06 .3 .7 1.1 ENDT 293.904 420.802 508.317 562.224
The following NLMOPTS entry enables large strain formulation using additive plasticity with mean normal return.NLMOPTS,LRGS,1
Loading and Boundary ConditionsThe following set of boundary conditions has been applied for both 2-D plane strain and 3-D shell models: Symmetry conditions (i.e., no displacement in horizontal direction) have been applied to the left size of the strip For the position controlled rigid body used for the die surface, all degrees of freedom have been suppressed. For the control node of the load controlled rigid body used for the punch surface, the displacement components in horizontal directions are suppressed, while the displacement in vertical direction is specified as a function of the time (refer to Table 3-3).
86 MD Demonstration ProblemsCHAPTER 3
Table 3-3 Vertical Displacement of Punch as a Function of Time Time 0.0 1.0 2.0 3.0 Vertical Displacement 0 -28.5 -28.5 0
The following data in the case control section of the input file defines the load and boundary conditions at the four different steps of the analysis. The bulk data entries SPCD, SPCR and SPC1 are used to define the loads in these steps. The SPCD data presented here shows the application of the imposed downward displacement of 28.5 in vertical direction in steps 1 and 2 at node 1 for the 2-D plane strain model. A similar imposed displacement is applied at node 1198 for the 3-D shell model. The SPCR data presented here shows the application of the imposed upward relative displacement of 10.0 in vertical direction in step 3 and its fixation in step 4 at node 927 for the 2-D plane strain model. A similar imposed relative displacement is applied at node 1167 for the 3-D shell model.SUBCASE 1 STEP 1 NLSTEP = BCONTACT SPC = 2 LOAD = 1 STEP 2 NLSTEP = BCONTACT SPC = 2 LOAD = 2 STEP 3 NLSTEP = BCONTACT SPC = 3 LOAD = 3
1 = 1
2 = 2
3 = 3
$ Loads for Load Case : step-1 SPCADD 2 7 9 SPCD 1 1 2 SPC1 7 1 2 SPC1 9 12 1 $ Loads for Load Case : step-2 SPCD 2 1 2 $ Loads for Load Case : step-3 SPCADD 3 7 8 SPCD 3 1 2 SPCR 3 927 2 SPC1 8 2 927
-28.5 3 -28.5 9 -18.5 10.
4
5
6
7
Solution ProcedureThe present analysis of metal forming and gradual spring back is carried out in four different steps on both the 2-D plane strain and 3-D shell models. In each of these models, the analysis has been carried out for the cases with and without friction using SOL 400 in MD Nastran. The first step analyses the metal forming process, the second step is used to achieve a more accurate solution before the spring back analysis starts in steps 3 and 4. In the first step, the metal forming operation is simulated by applying a vertical downward displacement of punch. The nonlinear procedure is defined through the following NLSTEP entry with ID 1. Here 100 indicates the total number
CHAPTER 3 87 3-D Sheet Metal Forming
of increments; PFNT represents Pure Full Newton-Raphson Technique wherein the stiffness is reformed at every iteration; 500 is the maximum number of allowed recycles for every increment. UP indicates that convergence will be checked on displacement (U) and residuals (P). The 0.01 defined in the fourth line of NLSTEP indicates the convergence tolerances of 0.01 for displacement and residual checking. The negative sign of displacement tolerance indicates that iteration on displacements will be checked against the incremental displacement quantity instead of total displacement. The second step is considered to be a dummy one in which the load applied in the first step is maintained with very fine convergence tolerances on displacement and residual. This step is used to ensure that the model reaches the good equilibrium condition at the end of step 2 and before starting step 3 involving the more complex spring back operation. It can be seen from the NLSTEP ID 3 that this spring back operation is done over 200 increments with a convergence check only on displacement.NLSTEP 1 1. GENERAL 500 FIXED 100 MECH UP 0 NLSTEP 2 1. GENERAL 500 FIXED 10 MECH UP 0 NLSTEP 3 1. GENERAL 500 FIXED 200 MECH U 0 1 1 -0.01 0 10 0.01 PFNT -1
1 10 1 -0.0001 0.0001 0 1 1 -0.01 0 10
PFNT
-1
PFNT
-1
To restrict rigid body movement during the springback step-3, a spring with very small stiffness (1e-5) is added at the free end using the following CELAS1 and PELAS cards.CELAS1 PELAS 851 2 2 1.E-